CN110414595B - 具有方向一致性的纹理图像的方向场估计方法 - Google Patents
具有方向一致性的纹理图像的方向场估计方法 Download PDFInfo
- Publication number
- CN110414595B CN110414595B CN201910674845.1A CN201910674845A CN110414595B CN 110414595 B CN110414595 B CN 110414595B CN 201910674845 A CN201910674845 A CN 201910674845A CN 110414595 B CN110414595 B CN 110414595B
- Authority
- CN
- China
- Prior art keywords
- texture
- sample
- image
- orientation
- size
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images


Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F18/00—Pattern recognition
- G06F18/20—Analysing
- G06F18/21—Design or setup of recognition systems or techniques; Extraction of features in feature space; Blind source separation
- G06F18/214—Generating training patterns; Bootstrap methods, e.g. bagging or boosting
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F18/00—Pattern recognition
- G06F18/20—Analysing
- G06F18/24—Classification techniques
- G06F18/241—Classification techniques relating to the classification model, e.g. parametric or non-parametric approaches
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/40—Extraction of image or video features
- G06V10/44—Local feature extraction by analysis of parts of the pattern, e.g. by detecting edges, contours, loops, corners, strokes or intersections; Connectivity analysis, e.g. of connected components
Landscapes
- Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Data Mining & Analysis (AREA)
- Physics & Mathematics (AREA)
- Computer Vision & Pattern Recognition (AREA)
- General Physics & Mathematics (AREA)
- Bioinformatics & Cheminformatics (AREA)
- Bioinformatics & Computational Biology (AREA)
- Evolutionary Biology (AREA)
- Evolutionary Computation (AREA)
- Artificial Intelligence (AREA)
- General Engineering & Computer Science (AREA)
- Life Sciences & Earth Sciences (AREA)
- Multimedia (AREA)
- Image Analysis (AREA)
Abstract
本发明具有方向一致性的纹理图像的方向场估计方法,包括以下步骤:步骤1:样本采集:采集样本的尺寸设为m×m,样本包括具有方向一致性的纹理图像子区域以及不包括纹理或具有其他类型纹理的子图像组成;步骤2:样本的方向标注;步骤3:使用Adaboost算法训练K+1类M层级联分类器;步骤4:利用训练好的分类模型对待处理纹理图像进行预测,给出方向估计。本发明方法将传统的纹理图像方向场估计问题转换为对局部图像的识别问题,采用的Haar特征和AdaBoost算法具有较好的实时性,为此类问题给出了全新的视角和详细的方法说明。
Description
技术领域
本发明涉及纹理图像方向场估计领域,特别涉及一种具有方向一致性的纹理图像的方向场估计方法。
背景技术
方向是纹理图像的重要特点和属性,特别对于具有方向一致性的纹理图像,其方向场表征了纹理的走向,是纹理图像增强的重要依据,也是图像识别的重要参数。目前纹理图像方向场估计的主要方法包括:(1)基于纹理图像的局部梯度信息进行方向场估计,该方法通过计算局部图像的水平差分强度矢量和垂直差分强度矢量,然后以两个矢量的和方向作为该局部的方向,此方法在清晰纹理区域能够得到准确的方向估计,但对于模糊区域和存在干扰纹理干扰的区域容易得到错误的结果;(2)通过比较局部图像在各个方向上的灰度投影信号,得到方向场估计,该方法的优点是在纹理一致性区域对纹理干扰和断裂情况有一定适应性,缺点是在纹理方向变化的区域得不到好的投影信号,使得方向的确定容易出错;(3)通过分析方向滤波器对图像增强的效果得到方向场的估计。该方法使用预设的若干个等方向间隔分布的Gabor滤波器或其他方向滤波器对纹理图像进行方向滤波和增强,然后对于各个局部比较其不同方向滤波器的滤波效果,具有最佳滤波效果的方向滤波器的方向指向即为该局部的纹理方向。该方法对干扰纹理和模糊局部都具有较好的鲁棒性,缺点是计算量较大;(4)提取与方向相关的特征结合神经网络进行预测的方法,该方法首先通过提取诸如梯度、方向一致性等参数作为特征,然后使用神经网络或其他机器学习方法预测得到方向场估计,该方法的特征提取是基于传统的有关方向的参数计算,通过组合多种特征达到有效分类的目的,缺点是特征参数的计算量较大,特征的可分性难以保证。
Haar特征具有对纹理的多尺度表达,能够有效提取纹理的边缘和方向等信息,且可以利用积分图像实现快速计算。AdaBoost算法可对数量庞大的特征进行有效性筛选,提取出分辨度高的特征,组合得到高效率的分类器,最后再将分类器进行级联,可以进一步得到级联分类器以提高分类性能。
发明内容
本发明的目的是针对上述现有技术存在的问题,提供一种具有方向一致性的纹理图像的方向场估计方法,该方法将传统的纹理图像方向场估计问题转换为对局部图像的识别问题,采用的Haar特征和AdaBoost算法具有较好的实时性,为此类问题给出了全新的视角和详细的方法说明。
本发明为实现上述目的采用的技术方案是:具有方向一致性的纹理图像的方向场估计方法,包括以下步骤:
步骤1:样本采集:采集样本的尺寸设为m×m,样本包括具有方向一致性的纹理图像子区域以及不包括纹理或具有其他类型纹理的子图像组成,其中m是取样图像块的尺寸;
步骤2:样本的方向标注:具体方法包括下面步骤2.1-2.5:
步骤2.1:将具有360°的方向变换到180°,设定纹理取向的有效范围为[-90°~90°),若纹理取向θ∈[90°,270°)时,通过θ=θ-180°将其变换至区间[-90°~90°);
步骤2.2:将方向取值范围离散化:均匀分割[-90°~90°)为K个区间,并为每个区间的定义标注值,其中K为方向区间数;
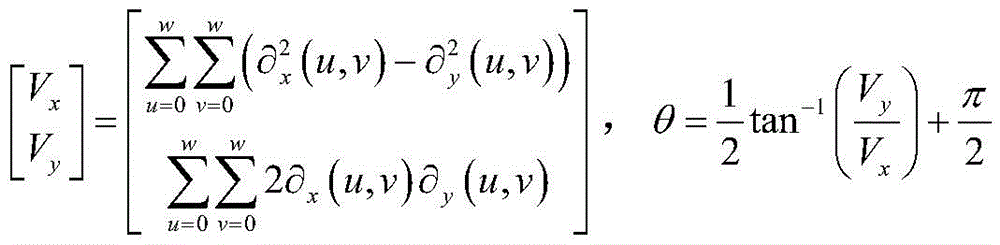
步骤2.3:基于样本梯度信息计算样本的方向,其计算公式如下:

其中,Vx、Vy分别是(u,v)处纹理方向向量的水平分量和垂直分量, 为图像(u,v)处的水平梯度和垂直梯度,可用下式求解,
为图像(u,v)处的水平梯度和垂直梯度,可用下式求解,


其中f(x,y)为(x,y)处像素;θ为该样本方向;
步骤2.4:根据步骤2.3计算的样本方向及步骤2.2划分的方向区间,为每个样本赋予标注值,作为其样本标签;
步骤2.5:人工检查方向标注,剔除或改正标注明显错误的样本;
步骤3:使用Adaboost算法训练K+1类M层级联分类器,其中K为方向区间数,M为设定的Adaboost分类器级联的层数:具体方法包括下面步骤3.1-3.3:
步骤3.1:选取边缘(Edge features)、线性(Line features)、中心(Center-surround features)Haar特征;
步骤3.2:使用AdaBoost算法训练得到每层分类器,设定其识别率和误识率分别为r,f;
步骤3.3:级联分类器:上一层未被正确识别的样本,继续输入下一层训练,最终得到M层级联分类器,则最终的识别率为rM,误识率为fM,其中r、f分别为每一层AdaBoost强分类器的识别率和误识别率;
步骤4:利用训练好的分类模型对待处理纹理图像进行预测,给出方向估计:具体方法包括下面步骤4.1-4.3:
步骤4.1:初始化方向图为无效方向;
步骤4.2:从纹理图像左上角开始,依次取(m+d)×(m+d)的图像块作为分类器输入,取样窗口每次移动[m/a]([]为取整符号,下同),其中m是取样图像块的尺寸、d为额外增加的尺寸、a为控制平移的大小;
步骤4.3:处理识别结果:选择具有最大概率的类别作为识别的类别结果,设定图像块中心([m/a])×([m/a])区域为预测的方向。
本发明具有方向一致性的纹理图像的方向场估计方法具有如下有益效果:
1)本发明将传统的纹理图像方向场估计问题转换为对局部图像的识别问题,采用的Haar特征和AdaBoost算法具有较好的实时性,为此类问题给出了全新的视角和详细的方法说明;
2)本发明将待识别图像划分为相互交叠的图像子块,首先对m×m尺寸较大的局部进行识别,并将分类结果赋给局部(m/a)×(m/a)小区域,这样可以使得在识别时利用更多的图像信息。
下面结合附图和实施例对本发明具有方向一致性的纹理图像的方向场估计方法作进一步的说明。
附图说明
图1是本发明具有方向一致性的纹理图像的方向场估计方法的图像块取样示意图;
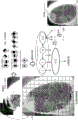
图2是本发明具有方向一致性的纹理图像的方向场估计方法中基于Haar特征和AdaBoost算法的方向分类器学习示意图;
图3是本发明具有方向一致性的纹理图像的方向场估计方法中基于Haar特征和AdaBoost算法的方向场估计示意图。
具体实施方式
本发明具有方向一致性的纹理图像的方向场估计方法,如图1至3所示,本实施例以指纹图像为例,说明本发明,具体实施方式如下:包括以下步骤:
步骤1:样本采集:采集样本的尺寸设为m×m,样本包括具有方向一致性的纹理图像子区域以及不包括纹理或具有其他类型纹理的子图像组成,其中m是取样图像块的尺寸,单位为像素。本实施例利用NIST SD4/27和FVC指纹数据库,分别采集64×64的指纹前景和背景样本,其中前景样本由纹理取向较为明显的样本组成;背景样本,要求不包括明显指纹区域。
步骤2:样本的方向标注:具体方法包括下面步骤2.1-2.5:
步骤2.1:由于一般更关注纹理的角度,所以将具有360°的方向变换到180°,如,设定纹理取向的有效范围为[-90°~90°),若纹理取向θ∈[90°,270°)时,通过θ=θ-180°将其变换至区间[-90°~90°);
步骤2.2:将方向取值范围离散化:均匀分割[-90°~90°)为K个区间,并为每个区间的定义标注值,其中K为方向区间数,可根据方向的离散量化精度要求自行确定,如将[-90°~90°)划分为均匀的8个区间,则这里K为8,K+1中的“1”代表背景区域,其方向一般没有一致性,可单独标示为一类;设定标注值,作为样本的可选标签,这里的K与方向区间的划分精度有关,可根据具体的精度需要进行调节。在本实施例,均匀分割[-90°~90°)为8个区间,并定义每个区间的取值依次为θk=-90,-67.5,-45,-22.5,0,22.5,45,67.5,k=1,2,...,8,对8个方向值依次标注为其下标k。
步骤2.3:基于样本梯度信息计算样本的方向,其计算公式如下:

其中,Vx、Vy分别是(u,v)处纹理方向向量的水平分量和垂直分量, 为图像(u,v)处的水平梯度和垂直梯度,可用下式求解,
为图像(u,v)处的水平梯度和垂直梯度,可用下式求解,


其中f(x,y)为(x,y)处像素;w取值为64,与样本尺寸一致,θ为样本方向。
步骤2.4:根据步骤2.3计算的样本方向及步骤2.2划分的方向区间,为每个样本赋予标注值,作为其样本标签;本实施例,按照邻近原则,将样本标注为其纹理方向θ最接近的方向标注,如θ=23°,则该样本标注为6。
步骤2.5:人工检查方向标注,剔除或改正标注明显错误的样本;
步骤3:使用Adaboost算法训练K+1类M层级联分类器,其中K为方向区间数,M为设定的Adaboost分类器级联的层数(一般地M越大,级联层数越多,分类精度越高,但过大的M也容易引起过拟合,建议M可在8-14取值):本实施例,如图2所示使用Adaboost算法训练得到10层(M=10)级联的9类(K=8)分类器,具体方法包括下面步骤3.1-3.3:
步骤3.1:选取边缘(Edge features)、线性(Line features)、中心(Center-surround features)Haar特征;
步骤3.2:使用AdaBoost算法训练得到每层分类器,设定其识别率和误识率分别为r=0.998,f=0.5;
步骤3.3:级联分类器:上一层未被正确识别的样本,继续输入下一层训练,最终得到M=10层级联分类器,则最终的识别率为rM=0.99810=0.980,误识率为fM=0.510=0.001。
步骤4:如图3所示,利用训练好的分类模型对待处理指纹图像进行预测,给出方向估计:具体方法包括下面步骤4.1-4.3:
步骤4.1:初始化方向图为无效方向,即初始化方向标注图为0;
步骤4.2:从纹理图像左上角开始,依次取(m+d)×(m+d)的图像块作为分类器输入,取样窗口每次移动[m/a],([]为取整符号,下同)其中m是取样图像块的尺寸,d为额外增加的尺寸,a为控制平移的大小,d取正值,表明在测试阶段每次输入到分类器中的样本尺寸大于训练样本尺寸m,这样可以使得adaboost算法在输入样本中可进行多尺度搜索;本实施例,从指纹图像左上角开始,依次取(64+4)×(64+4)像素的图像块,相邻图像块每次的偏移为64/4=16像素。
步骤4.3:处理识别结果:选择具有最大概率的类别作为识别的类别结果,设定图像块中心([m/a])×([m/a])区域为预测的方向,[m/a]构成重叠区域尺寸,如取m=64,d=6,a=4,则每次输入到分类器的样本图片大小为70像素,多尺度搜索系数可以为0.9-1.1,取样窗口每次移动16像素。本实施例,分类每一图像块,方法是:将68×68图像块输入分类器,若预测最大概率的类别结果为类别k,则幅值方向标注图相应区域的中心16×16区域为k。其中k与离散的方向区间是一一对应的。
以上实施例仅为本发明的较佳实施例,本发明并不限于上述实施例列举的形式,凡在本发明的精神和原则之内所作的任何修改、等同替换等,均应包含在本发明的保护范围之内。
Claims (1)
1.具有方向一致性的纹理图像的方向场估计方法,其特征在于,包括以下步骤:
步骤1:样本采集:采集样本的尺寸设为m×m,样本包括具有方向一致性的纹理图像子区域以及不包括纹理或具有其他类型纹理的子图像组成,其中m是取样图像块的尺寸;
步骤2:样本的方向标注:具体方法包括下面步骤2.1-2.5:
步骤2.1:将具有360°的方向变换到180°,设定纹理取向的有效范围为[-90°~90°),若纹理取向θ∈[90°,270°)时,通过θ=θ-180°将其变换至区间[-90°~90°);
步骤2.2:将方向取值范围离散化:均匀分割[-90°~90°)为K个区间,并为每个区间的定义标注值,其中K为方向区间数;
步骤2.3:基于样本梯度信息计算样本的方向,其计算公式如下:
其中,Vx、Vy分别是(u,v)处纹理方向向量的水平分量和垂直分量, 为图像(u,v)处的水平梯度和垂直梯度,可用下式求解,
为图像(u,v)处的水平梯度和垂直梯度,可用下式求解,


其中f(x,y)为(x,y)处像素;θ为该样本方向;
步骤2.4:根据步骤2.3计算的样本方向及步骤2.2划分的方向区间,为每个样本赋予标注值,作为其样本标签;
步骤2.5:人工检查方向标注,剔除或改正标注明显错误的样本;
步骤3:使用Adaboost算法训练K+1类M层级联分类器,其中K为方向区间数,M为设定的Adaboost分类器级联的层数,具体方法包括下面步骤3.1-3.3:
步骤3.1:选取边缘(Edge features)、线性(Line features)、中心(Center-surroundfeatures)Haar特征;
步骤3.2:使用AdaBoost算法训练得到每层分类器,设定其识别率和误识率分别为r,f;
步骤3.3:级联分类器:上一层未被正确识别的样本,继续输入下一层训练,最终得到M层级联分类器,则最终的识别率为rM,误识率为fM,其中r、f分别为每一层AdaBoost强分类器的识别率和误识别率;
步骤4:利用训练好的分类模型对待处理纹理图像进行预测,给出方向估计:具体方法包括下面步骤4.1-4.3:
步骤4.1:初始化方向图为无效方向;
步骤4.2:从纹理图像左上角开始,依次取(m+d)×(m+d)的图像块作为分类器输入,取样窗口每次移动[m/a],其中m是取样图像块的尺寸、d为额外增加的尺寸、a为控制平移的大小;
步骤4.3:处理识别结果:选择具有最大概率的类别作为识别的类别结果,设定图像块中心([m/a])×([m/a])区域为预测的方向。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201910674845.1A CN110414595B (zh) | 2019-07-25 | 2019-07-25 | 具有方向一致性的纹理图像的方向场估计方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201910674845.1A CN110414595B (zh) | 2019-07-25 | 2019-07-25 | 具有方向一致性的纹理图像的方向场估计方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN110414595A CN110414595A (zh) | 2019-11-05 |
| CN110414595B true CN110414595B (zh) | 2022-04-08 |
Family
ID=68363029
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201910674845.1A Expired - Fee Related CN110414595B (zh) | 2019-07-25 | 2019-07-25 | 具有方向一致性的纹理图像的方向场估计方法 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN110414595B (zh) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN116091857B (zh) * | 2022-10-17 | 2023-10-20 | 北京百度网讯科技有限公司 | 图像处理模型的训练方法、图像处理方法和装置 |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101833750A (zh) * | 2010-04-15 | 2010-09-15 | 清华大学 | 基于形状约束和方向场的主动轮廓方法及其系统 |
| CN103646238A (zh) * | 2013-12-19 | 2014-03-19 | 清华大学 | 指纹方向场的估计方法和装置 |
| CN104732217A (zh) * | 2015-03-27 | 2015-06-24 | 电子科技大学 | 一种自适应模板大小指纹方向场计算方法 |
| CN109460722A (zh) * | 2018-10-26 | 2019-03-12 | 华南理工大学 | 一种车牌智能识别方法 |
| CN109829906A (zh) * | 2019-01-31 | 2019-05-31 | 桂林电子科技大学 | 一种基于方向场与纹理特征的工件缺陷检测与分类方法 |
| CN110378307A (zh) * | 2019-07-25 | 2019-10-25 | 广西科技大学 | 基于深度学习的纹理图像方向场估计方法 |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9536327B2 (en) * | 2015-05-28 | 2017-01-03 | Adobe Systems Incorporated | Example-based edge-aware directional texture painting |
-
2019
- 2019-07-25 CN CN201910674845.1A patent/CN110414595B/zh not_active Expired - Fee Related
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101833750A (zh) * | 2010-04-15 | 2010-09-15 | 清华大学 | 基于形状约束和方向场的主动轮廓方法及其系统 |
| CN103646238A (zh) * | 2013-12-19 | 2014-03-19 | 清华大学 | 指纹方向场的估计方法和装置 |
| CN104732217A (zh) * | 2015-03-27 | 2015-06-24 | 电子科技大学 | 一种自适应模板大小指纹方向场计算方法 |
| CN109460722A (zh) * | 2018-10-26 | 2019-03-12 | 华南理工大学 | 一种车牌智能识别方法 |
| CN109829906A (zh) * | 2019-01-31 | 2019-05-31 | 桂林电子科技大学 | 一种基于方向场与纹理特征的工件缺陷检测与分类方法 |
| CN110378307A (zh) * | 2019-07-25 | 2019-10-25 | 广西科技大学 | 基于深度学习的纹理图像方向场估计方法 |
Non-Patent Citations (5)
| Title |
|---|
| An Efficient Direction Field-Based Method for the Detection of Fasteners on High-Speed Railways;Jinfeng Yang等;《sensors》;20110725;7364-7381 * |
| Palmprint recognition using Palm-line direction field texture feature;YAN-XIA WANG等;《2012 International Conference on Machine Learning and Cybernetics》;20120715;1130-1134 * |
| 基于回归的指纹方向场估计;戴晓薇等;《计算机技术与发展》;20170104;第27卷(第01期);第1-5页 * |
| 基于局部字典的残缺指纹方向场重建算法的研究;何亚兵;《中国优秀硕士学位论文全文数据库_信息科技辑》;20170315;I138-5018 * |
| 基于彩色视网膜图像的眼底病相关目标检测方法研究;戴百生;《中国博士学位论文全文数据库_医药卫生科技辑》;20180115;E073-8 * |
Also Published As
| Publication number | Publication date |
|---|---|
| CN110414595A (zh) | 2019-11-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN114565675B (zh) | 一种在视觉slam前端去除动态特征点的方法 | |
| CN110929593B (zh) | 一种基于细节辨别区别的实时显著性行人检测方法 | |
| CN103530600B (zh) | 复杂光照下的车牌识别方法及系统 | |
| CN105374033B (zh) | 基于脊波反卷积网络和稀疏分类的sar图像分割方法 | |
| CN105574527B (zh) | 一种基于局部特征学习的快速物体检测方法 | |
| CN107423760A (zh) | 基于预分割和回归的深度学习目标检测方法 | |
| CN105844228A (zh) | 一种基于卷积神经网络的遥感图像云检测方法 | |
| CN106529499A (zh) | 基于傅里叶描述子和步态能量图融合特征的步态识别方法 | |
| CN104751187A (zh) | 抄表图像自动识别方法 | |
| CN101551863A (zh) | 基于非下采样轮廓波变换的遥感图像道路提取方法 | |
| CN108765465A (zh) | 一种无监督sar图像变化检测方法 | |
| CN107590427B (zh) | 基于时空兴趣点降噪的监控视频异常事件检测方法 | |
| CN103778435A (zh) | 一种基于视频的行人快速检测方法 | |
| CN109615604A (zh) | 基于图像重构卷积神经网络的零件外观瑕疵检测方法 | |
| CN114119586A (zh) | 一种基于机器视觉的飞机蒙皮缺陷智能检测方法 | |
| CN116030396B (zh) | 一种用于视频结构化提取的精确分割方法 | |
| CN110706235A (zh) | 一种基于双级级联分割的远红外行人检测方法 | |
| CN104616321B (zh) | 一种基于尺度不变特征变换的行李图像运动行为描述方法 | |
| CN108875645A (zh) | 一种煤矿井下复杂光照条件下的人脸识别方法 | |
| CN106557740A (zh) | 一种遥感图像中油库目标的识别方法 | |
| CN114677552A (zh) | 用于深度学习的指纹细节数据库标注方法和系统 | |
| CN108734200B (zh) | 基于bing特征的人体目标视觉检测方法和装置 | |
| CN115359350A (zh) | 一种基于图模型的群目标队形变化识别方法 | |
| CN105426924A (zh) | 一种基于图像中层特征的场景分类方法 | |
| CN104599291A (zh) | 基于结构相似度和显著性分析的红外运动目标检测方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant | ||
| CF01 | Termination of patent right due to non-payment of annual fee | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20220408 |