CN109429545B - 用于对电机进行控制的方法和装置 - Google Patents
用于对电机进行控制的方法和装置 Download PDFInfo
- Publication number
- CN109429545B CN109429545B CN201780040780.4A CN201780040780A CN109429545B CN 109429545 B CN109429545 B CN 109429545B CN 201780040780 A CN201780040780 A CN 201780040780A CN 109429545 B CN109429545 B CN 109429545B
- Authority
- CN
- China
- Prior art keywords
- electric machine
- demagnetization
- degree
- basis
- detected
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims abstract description 33
- 230000005347 demagnetization Effects 0.000 claims abstract description 79
- 238000001514 detection method Methods 0.000 claims description 18
- 230000001276 controlling effect Effects 0.000 claims description 13
- 230000004907 flux Effects 0.000 claims description 11
- 230000007246 mechanism Effects 0.000 claims description 9
- 230000001105 regulatory effect Effects 0.000 claims description 3
- 230000008569 process Effects 0.000 description 5
- 230000001360 synchronised effect Effects 0.000 description 4
- 238000012986 modification Methods 0.000 description 3
- 230000004048 modification Effects 0.000 description 3
- 238000010586 diagram Methods 0.000 description 2
- 238000005259 measurement Methods 0.000 description 2
- 230000001052 transient effect Effects 0.000 description 2
- 238000007792 addition Methods 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 230000018109 developmental process Effects 0.000 description 1
- 239000000696 magnetic material Substances 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 230000001960 triggered effect Effects 0.000 description 1
Images


Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P21/00—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation
- H02P21/14—Estimation or adaptation of machine parameters, e.g. flux, current or voltage
- H02P21/141—Flux estimation
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P21/00—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation
- H02P21/14—Estimation or adaptation of machine parameters, e.g. flux, current or voltage
- H02P21/20—Estimation of torque
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P21/00—Arrangements or methods for the control of electric machines by vector control, e.g. by control of field orientation
- H02P21/22—Current control, e.g. using a current control loop
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Control Of Ac Motors In General (AREA)
Abstract
本发明公开了一种用于在故障情况下对具有磁阻力矩份额的电机(2)进行控制的方法,所述方法具有以下步骤:在故障情况下检测(S1)所述电机(2)的去磁程度(10);在所述去磁程度(10)的基础上对用于所述电机(2)的控制的目标值生成进行调整(S2);并且在所述经过调整的目标值生成的基础上对所述电机(2)进行操控(S3)。此外,本发明公开了一种相应的装置(1)。
Description
技术领域
本发明涉及一种用于对电机进行控制的方法和一种相应的装置。
背景技术
下面主要关于车辆中的电机对本发明进行描述。但是,本发明不局限于这种应用情况并且能够用在每种使用电机的应用情况中。
电机现今用在大量的应用情况中。一种用于电机、尤其是永久励磁的同步电机的应用情况比如能够是用作电动车或者混合动力车中的驱动马达的情况。
尤其对于具有很高的动态(Dynamik)的、也就是连续的负荷交变的电机来说,要预料到相应的电机的高的热负荷。因为通常要优化地利用磁性材料的极限温度和最大的电流负荷,所以在存在高的热负荷时所述电机可能容易经受去磁。系统故障因此可能导致所述电机的部分的或者甚至完全的去磁。
通常,具有去磁的电机的车辆不能继续运动并且必须停止。
发明内容
本发明公开了一种用于对电机进行控制的方法以及一种相应的装置。
因此设置了:
一种用于在故障情况下对电机进行控制的方法,其中所述电机具有磁阻力矩份额(Reluktanzmomentanteil)。这样的电机比如能够是电动车中的相应的永久励磁的同步电机。这样的电机能够在其磁阻的基础上产生转矩的预先给定的份额。比如所述磁阻份额能够在20%与60%之间、尤其为50%。所述方法具有以下步骤:在故障情况下检测所述电机的去磁程度。所述故障情况比如能够通过上级的马达控制机构(Motorsteuerung)来探测,所述上级的马达控制机构采取相应的措施,比如在所述电机上设定主动的短路、在所述去磁程度的基础上对用于电机的控制的目标值生成进行调整,以便例如确保所述电机的目标转矩与相电流之间的比例性(Proportionalität),并且在经过调整的目标值生成的基础上操控所述电机。
此外设置了:
一种用于在故障情况下对具有磁阻力矩份额的电机进行控制的装置,该装置具有:调节,所述调节尤其构造用于在矢量控制的基础上操控所述电机;检测装置,所述检测装置构造用于在故障情况下检测所述电机的去磁程度;并且具有调整装置,所述调整装置构造用于在所述去磁程度的基础上调整所述调节的目标值生成。
本发明的优点
永久励磁的同步电机,如果对于其来说永久磁体(Dauermagnet)被去磁,通常就不能继续被驱动。尤其在车辆中这样的故障可能导致以下结果,即:所述车辆不再运动并且比如不能开到维修点。
与常见的、具有很小的磁阻份额的电机相比,本发明利用以下认识,即:如果所述电机的永久磁体比如由于故障而被去磁,于是也能够操控具有突出的(ausgeprägt)磁阻份额或者比如高达50%的磁阻力矩份额的电机。
本发明的主题因此也比如能够是下述车辆,所述车辆具有相应地设计的电机,所述电机比如具有50%的磁阻份额。50%的磁阻份额或者磁阻力矩份额在此是指,所述电机通过所述磁阻份额产生其转矩的50%。
这同时意味着,所述电机在故障情况下还总是能够产生大小为其额定转矩的50%的转矩。在故障情况下,用这种转矩虽然不能将所述车辆加速到其最高速度。但是,至少能够以所谓的“Limp Home(跛行回家)”模式使所述车辆运动。所述车辆因此比如能够从危险区中运动出来或者开到维修点。
通常,上级的马达控制机构对于永久励磁的同步电机来说在故障情况下开始所谓的“主动的短路”。在这种状态中,不再能够驱动所述电机。因为在主动的短路的情况下能够流动高瞬态的电流,所以所述高瞬态的电流可能导致所述电机的部分的或者完全的去磁。因此,本发明提出,在故障情况下检测所述电机的去磁程度。
如果检测到所述电机的去磁程度,那就能够使对于所述电机的操控、尤其是所述控制或者调节的目标值生成与所述电机的新的参数相适配。随后,能够相应地操控所述电机并且用降低的转矩来继续使用所述电机。
有利的实施方式和改进方案从说明书中参照附图来得出。
在一种实施方式中,在检测所述去磁程度时能够在所述电机的主动的短路的情况下检测相电流,并且在所检测到的相电流与所述电机的额定电流的比例的基础上在所述电机的无去磁的主动的短路的情况下确定所述去磁程度。这能够直接在出现所述故障情况开始之后实现对于所述去磁程度的非常快速的检测。
在一种实施方式中,能够在检测所述去磁程度时在所述电机的空转中将所述相电流调节到零,并且在转子固定的坐标系中在D-轴电压的基础上确定所述去磁程度。对于所述去磁程度的测量能够在下述时间段中执行,所述时间段在所述故障情况下没有干扰地引起驾驶员的注意。通过试验已经确定,这样的测量比如需要小于200 ms的时间,在所述时间里所述电机的力矩变为零。
如果所述电机处于停止状态中,也就是比如电动车停止,那就不能检测所述电机的去磁程度。因此,必须将所述电机置于旋转之中,以便检测所述去磁程度。因此,在一种实施方式中,能够在检测所述去磁程度之前在调节运行的特性曲线和/或参数的基础上从所述停止状态中操控所述电机并且将其置于旋转之中。如果用这些参数没有进行所述电机的旋转,则能够认为存在完全的去磁。
在一种实施方式中,在操控所述电机之前能够分开所述电机与通过所述电机来驱动的元件之间的机械的连接。对于电动车来说,比如能够断开离合器。因此,所述车辆在所述电机旋转时未被驱动。因此,仅仅需要很小的功率,以便将所述电机置于旋转之中。此外,在车辆完全停止时,也就是在没有所述车辆的运动的情况下检测,是否能够毫无问题进行所述电机的运行。比如,只有在验证了所述电机的毫无问题的紧急运行之后,才能释放所述车辆的运动。
在一种实施方式中,能够在所检测到的D-轴电压的基础上计算所述电机的当前的永久磁通量并且将其与所述电机的标称的永久磁通量进行比较,以便计算所述电机的去磁程度。
在一种实施方式中,在对所述电机的调节中的目标值生成进行调整时,为相应的去磁程度选择用于所述电机的数据的、预先给定的特性曲线和/或参数。这些特性曲线和参数涉及所述调节中的变量,所述变量描述了所述电机的特性。这样的特性比如能够涉及所述电机的电感或者类似参数。
在一种实施方式中,在对所述电机的调节中的目标值生成进行调整时为相应的去磁程度选择所述调节的、预先给定的特性曲线和/或参数。这些特性曲线和参数比如能够涉及用于电机的调节中的运行特性曲线和电流调节参数。通过对于这些参数的调整来确保稳定的调整回路并且在通过所述去磁来给定的边界条件下最佳地设定运行点。
在一种实施方式中,在控制所述电机时,能够在所选择的特性曲线和/或参数的基础上执行调节。因此,能够在所述电机的磁阻份额的基础上继续运行所述电机,即使所述电机部分地或者完全地去磁。
上面的设计方案和改进方案,只要有意义都可以任意地彼此组合。本发明的另外的可能的设计方案和改进方案和实施方式也包括本发明的前面或者下面关于实施例所描述的特征的、未明确地提到的组合。尤其在此本领域的技术人员也会将单个方面作为改进方案或者补充方案添加到本发明的相应的基本形式上。
附图说明
下面借助于在附图的示意图中说明的实施例对本发明进行详细解释。在此:
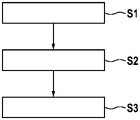
图1示出了根据本发明的方法的一种实施方式的流程图;
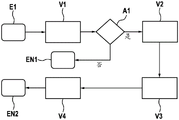
图2示出了根据本发明的方法的另一种实施方式的流程图;
图3示出了根据本发明的方法的另一种实施方式的流程图;并且
图4示出了根据本发明的装置的一种实施方式的方框图。
在所有附图中,相同的或者功能相同的元件-只要未作其它说明-都已经设有相同的附图标记。
具体实施方式
图1示出了根据本发明的、用于对电机2进行控制的方法的一种实施方式的流程图(参见图4)。所述方法基于以下事实,即:所述电机2具有这样的磁阻力矩份额,所述磁阻力矩份额大到足以比如在故障情况下使车辆运动,即使这个过程以降低的动态和速度来进行。
所述方法在此在所述电机2或者驱动系统(未单独地示出)的故障情况下得到执行,以便能够实现紧急运行。
因此,在故障情况下,检测S1所述电机2的去磁程度10。在这种去磁程度10的基础上,对用于所述电机2的控制或者调节的目标值生成8进行调整S2。最后,在所述经过调整的目标值生成8的基础上操控S3所述电机2。
如果电机2比如具有50%的磁阻力矩份额,那么在所述电机2完全去磁时在故障情况下能够继续施加所述电机2的额定转矩的50%的转矩。
至少能够在所述电机2的两种不同的状态中检测所述去磁程度10。
在所述电机2的主动的短路的情况下,为此能够检测所述电机2的相电流16、17、18,并且在所检测到的相电流16、17、18与所述电机2的额定电流的比例的基础上在所述电机2的无去磁的主动的短路的情况下确定所述去磁程度10。
作为替代方案,在检测S1所述去磁程度10时能够在所述电机2的空转中将所述相电流16、17、18调节到零,这也被称为无电流的调节。而后能够在转子固定的坐标系中在所述D-轴电压的基础上确定所述去磁程度10。
为了检测所述去磁程度10,需要所述电机2的旋转。因此,能够在检测S1所述去磁程度10之前在调节运行的特性曲线和/或参数的基础上从停止状态中操控所述电机2并且将其置于旋转之中。如果在出现故障情况之后直至车辆的停止状态不能确定所述去磁程度10,则这种情况比如可能出现。
如果比如车辆处于停止状态中,则能够在操控所述电机2之前分开所述电机2与通过所述电机2来驱动的元件之间的机械的连接。所述电机2由此无负荷并且能够非常容易地被置于旋转之中。
如果所述相电流16、17、18被调节到零,那就在所检测到的D-轴电压的基础上计算所述电机2的当前的永久磁通量并且将其与所述电机2的标称的永久磁通量进行比较,以便计算所述电机2的去磁程度10。
为了能够在对于所述电机2的操控中利用对于所述去磁程度10的了解,能够在调整S2时在对于所述电机2的操控中选择用于所述电机2的数据的、预先给定的特性曲线和/或参数10-12。这些特性曲线和参数涉及所述调节中的变量,所述变量描述了所述电机的特性。这样的特性比如能够涉及所述电机的电感或者类似参数。在此,能够为不同的去磁程度10预先给定这样的特性曲线和/或参数10-12。如果对特定的去磁程度10来说无特性曲线和/或参数10-12可用,那也能够内插(interpolieren)所述特性曲线和/或参数。同样能够为相应的去磁程度10选择调节的预先给定的特性曲线和/或参数13-14。所述特性曲线和参数比如能够涉及用于电机的调节中的运行特性曲线和电流调节参数。
最后,在控制S3所述电机2时在所选择的特性曲线和/或参数10-15的基础上执行调节、尤其是基于矢量的调节。
图2示出了根据本发明的方法的另一种实施方式的流程图。
图2的方法在接入节点(Einstiegsknoten)E1处开始,在所述接入节点中进行所述电机2的调节运行。所述过程V1代表着系统故障的开始,所述系统故障导致所述电机2被断开。这样的过程V1比如能够通过驱动系统中的过电流监控来触发。
在选择节点A1中选择,是否需要调整对于所述电机2的操控。如果不需要所述调整,因为比如不存在去磁,那就在最终节点EN1处结束所述方法。不过如果需要所述调整,则在过程V2中检测所述电机2的去磁的严重性并且在过程V3中根据所检测到的去磁程度10对所述电机2的操控中的电机数据(Maschinenbedatung)进行调整。最后,在过程V4中,根据所检测到的去磁程度10来调整所述电机2的操控中的调节器数据(Reglerbedatung)。此后又在最终节点EN2中开始对于所述电机2的操控。
图3示出了根据本发明的方法的下述部分的另一种实施方式的流程图,利用所述部分来确定所述去磁程度10。
所述接入节点E2代表着所述检测的开始。选择A2确保了,所述电机2处于空转之中。如果不是这种情况,因为所述系统比如处于主动的短路中,那在最终节点EN2中等待,直至所述电机2处于空转之中并且所述方法重新在E2处开始。
如果所述电机2在A2处于空转之中,那就在A3处确保所述电机2旋转。如果不是这种情况,那就在EN3中在无故障的运行中将具有调节的额定参数和/或特性曲线的电机2置于旋转之中。如果所述电机2处于旋转之中,那就在V5中激活基于矢量的电流调节,所述基于矢量的电流调节将所述相电流16、17、18调节到零。在V6中在所述转子固定的坐标系中确定所述D-轴电压。
在A4中辨别,所述电机2是否完全去磁。如果是这种情况,则在V7中在所述电机2的操控中为无磁通量的电机2、也就是磁阻电机选择特性曲线和/或参数10-15。
如果所述电机2未完全去磁,则在V8中在所述转子固定的坐标系中在D轴上确定电压向量(Spannungszeiger),并且在V9中确定所述电机2中的通量降低、也就是去磁程度10。为此,比如也能够在所述D-轴上执行对于所述电压向量的温度补偿。
最后,在EN5中又开始具有相应的、与相应的去磁程度10相对应的特性曲线和/或参数的电机2的运行。
图4示出了根据本发明的、用于在故障情况下对具有磁阻力矩份额的电机2进行操控的装置1的一种实施方式的方框图。在图4中示出了具有50%的磁阻力矩份额的三相的异步电机2。不言而喻,根据所述异步电机2的设计能够提供其它的磁阻力矩份额以供使用并且可以类似地运用本发明。由此,仅仅在故障情况下能够通过所述电机提供的转矩发生变化。
所述装置1具有调节机构6。该调节机构在矢量控制7或者所谓的基于矢量的控制7的基础上操控所述电机2。在进行这样的控制时,在转子固定的坐标系中计算目标电流并且而后将其转换到定子固定的坐标系中,以便操控所述电机2。在一种实施方式中,所述调节机构6也能够是驱动系统中的上级的控制机构的组成部分并且针对所述装置1的另外的组件具有相应的接口。此外,所述装置1的组件中的至少一些组件能够比如作为软件组件被集成在所述上级的控制机构中并且利用其传感器和另外的组件。
在所述装置1中,此外设置了检测装置9。该检测装置检测在故障情况下所述电机2的去磁程度10。为此,所述检测装置9比如能够利用上面所解释的方法步骤。
所述检测装置9能够在所述电机2的主动的短路的情况下检测相电流16-18并且在所检测到的相电流16-18与所述电机2的额定电流的比例的基础上在所述电机2的、无去磁的主动的短路的情况下确定所述去磁程度10。所述检测装置9为此能够具有自身的传感器或者利用所述上级的控制机构的传感器。
作为替代方案,所述检测装置9能够在所述电机2的空转中将所述相电流16-18调节到零并且在所述转子固定的坐标系中在所述D-轴电压的基础上确定所述去磁程度10。所述检测装置为此能够在所检测到的D-轴电压的基础上计算所述电机2的当前的永久磁通量并且将其与所述电机2的标称的永久磁通量进行比较。在这个比例的基础上能够确定所述电机2的去磁程度10。
如果所述电机2处于停止状态中,那么所述检测装置9就能够在检测所述去磁程度10之前在调节运行的特性曲线和/或参数的基础上操控所述电机2并且将其置于旋转之中。能够在操控所述电机2之前事先分开所述电机2与通过所述电机2来驱动的元件之间的机械的连接。
调整装置11利用关于对所述去磁程度 10的了解并且在所述去磁程度10的基础上对所述调节机构6的目标值生成8进行调整,从而在给定的边界条件下利用所述电机2实现最佳的效率。
在调整所述目标值生成8时,所述调整装置11能够为所述调节机构6的相应的去磁程度10来传输用于所述电机2的数据的预先给定的特性曲线和/或参数10-12和/或所述调节的预先给定的特性曲线和/或参数13-15或者在所述调节机构6中选择所述特性曲线和/或参数10-12以及所述特性曲线和/或参数13-15,如果它们已经被保存在所述调节机构6中。
最后,所述调节机构6能够利用所选择的特性曲线和/或参数10-15,以便执行对于所述电机2的调节。
尽管前面借助于优选的实施例对本发明进行了描述,但是本发明不局限于此,而是能够以多种多样的方式方法来修改。尤其本发明可以以各式各样的方式来更改或者修改,而不偏离本发明的核心。
Claims (16)
1.用于在故障情况下对具有磁阻力矩份额的电机(2)进行控制的方法,所述方法具有以下步骤:
在故障情况下检测所述电机(2)的去磁程度(10);
在所述去磁程度(10)的基础上对用于所述电机(2)的控制的目标值生成进行调整;以及
在所述经过调整的目标值生成的基础上对所述电机(2)进行操控。
2.根据权利要求1所述的方法,其中在检测所述去磁程度(10)时在所述电机(2)的主动的短路的情况下检测相电流,并且在检测到的相电流与所述电机(2)的额定电流的比例的基础上在所述电机(2)的无去磁的主动的短路的情况下确定所述去磁程度(10)。
3.根据前述权利要求中任一项所述的方法,其中在检测所述去磁程度(10)时在所述电机(2)的空转中将相电流调节到零,并且在转子固定的坐标系中在D-轴电压的基础上确定所述去磁程度(10)。
4.根据权利要求3所述的方法,其中在检测所述去磁程度(10)之前在调节运行的特性曲线和/或参数的基础上从停止状态中操控所述电机(2)并且将其置于旋转之中。
5.根据权利要求4所述的方法,其中在操控所述电机(2)之前分开所述电机(2)与通过所述电机(2)来驱动的元件之间的机械的连接。
6.根据权利要求3所述的方法,其中在检测到的D-轴电压的基础上计算所述电机(2)的当前的永久磁通量并且将其与所述电机(2)的标称的永久磁通量进行比较,以便计算所述电机(2)的去磁程度(10)。
7.根据权利要求1或2所述的方法,其中在对所述电机(2)的调节中的目标值生成进行调整时为相应的去磁程度(10)选择并且/或者提供用于所述电机(2)的数据的、预先给定的特性曲线和/或参数。
8.根据权利要求1或2所述的方法,在对所述电机(2)的调节中的目标值生成进行调整时为所述相应的去磁程度(10)选择并且/或者提供进行所述调节的、预先给定的特性曲线和/或参数。
9.根据权利要求7所述的方法,其中在控制所述电机(2)时在所选择的和/或所提供的特性曲线和/或参数的基础上执行所述调节。
10.用于在故障情况下对具有磁阻力矩份额的电机(2)进行控制的装置,该装置具有:
调节机构(6),所述调节机构构造用于操控所述电机(2);
检测装置(9),所述检测装置构造用于在故障情况下检测所述电机(2)的去磁程度(10);
调整装置(11),所述调整装置构造用于在所述去磁程度(10)的基础上调整所述调节机构(6)的目标值生成(8)。
11.根据权利要求10所述的装置,其中所述检测装置(9)构造用于:在检测所述去磁程度(10)时在所述电机(2)的主动的短路的情况下检测相电流,并且在检测到的相电流与所述电机(2)的额定电流的比例的基础上在所述电机(2)的、无去磁的主动的短路的情况下确定所述去磁程度(10)。
12.根据权利要求10或11所述的装置,其中所述检测装置(9)构造用于:在检测所述去磁程度(10)时在所述电机(2)的空转中将相电流调节到零,并且在转子固定的坐标系中在D-轴电压的基础上确定所述去磁程度(10);并且
其中所述检测装置(9)构造用于:在检测所述去磁程度(10)之前在调节运行的特性曲线和/或参数的基础上从停止状态中操控所述电机(2)并且将其置于旋转之中。
13.根据权利要求12所述的装置,其中所述检测装置(9)构造用于:在检测到的D-轴电压的基础上计算所述电机(2)的当前的永久磁通量并且将其与所述电机(2)的标称的永久磁通量进行比较,以便计算所述电机(2)的去磁程度(10)。
14.根据权利要求10或11所述的装置,其中所述调整装置(11)构造用于:在对所述调节机构(6)中的目标值生成(8)进行调整时为所述相应的去磁程度(10)选择用于所述电机(2)的数据的、预先给定的特性曲线和/或参数;并且/或者其中所述调整装置(11)构造用于,在对所述调节机构(6)中的目标值生成(8)进行调整时为所述相应的去磁程度(10)选择进行所述调节的、预先给定的特性曲线和/或参数。
15.根据权利要求14所述的装置,其中所述调节机构(6)构造用于:在所选择的特性曲线和/或参数的基础上执行对于所述电机(2)的调节。
16.根据权利要求12所述的装置,其中所述检测装置(9)构造用于:在操控所述电机(2)之前分开所述电机(2)与通过所述电机(2)来驱动的元件之间的机械的连接。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102016207375.3 | 2016-04-29 | ||
| DE102016207375.3A DE102016207375A1 (de) | 2016-04-29 | 2016-04-29 | Verfahren und Vorrichtung zum Steuern einer Elektromaschine |
| PCT/EP2017/056964 WO2017186420A1 (de) | 2016-04-29 | 2017-03-23 | Verfahren und vorrichtung zum steuern einer elektromaschine |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN109429545A CN109429545A (zh) | 2019-03-05 |
| CN109429545B true CN109429545B (zh) | 2022-04-26 |
Family
ID=58410323
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201780040780.4A Active CN109429545B (zh) | 2016-04-29 | 2017-03-23 | 用于对电机进行控制的方法和装置 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US10819265B2 (zh) |
| EP (1) | EP3449564B1 (zh) |
| CN (1) | CN109429545B (zh) |
| DE (1) | DE102016207375A1 (zh) |
| WO (1) | WO2017186420A1 (zh) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102017204645A1 (de) * | 2017-03-21 | 2018-09-27 | Robert Bosch Gmbh | Verfahren und Vorrichtung zum Erkennen eines Funktionszustandes eines elektrischen Motors |
Citations (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CA2403329A1 (en) * | 2001-09-17 | 2003-03-17 | Ford Global Technologies, Inc. | Adaptive demagnetization compensation for a motor in an electric or partially electric motor vehicle |
| CN1830135A (zh) * | 2003-07-31 | 2006-09-06 | 丰田自动车株式会社 | 能够准确地估计永磁电机的去磁的电机驱动设备 |
| DE60036192T2 (de) * | 2000-02-28 | 2008-05-21 | Hitachi, Ltd. | Synchronmotor-Steuervorrichtung und Fahrzeug mit der Steuervorrichtung |
| CN102445610A (zh) * | 2010-09-22 | 2012-05-09 | 山洋电气株式会社 | 电气设备的永久磁体的劣化判定方法及装置 |
| DE102010050344A1 (de) * | 2010-11-05 | 2012-05-10 | Getrag Getriebe- Und Zahnradfabrik Hermann Hagenmeyer Gmbh & Cie Kg | Feldorientierte Regelung einer Drehfeldmaschine |
| CN102916644A (zh) * | 2012-11-20 | 2013-02-06 | 上海中科深江电动车辆有限公司 | 电动汽车永磁同步电机失磁控制系统及控制方法 |
| CN102944857A (zh) * | 2012-11-23 | 2013-02-27 | 上海中科深江电动车辆有限公司 | 永磁同步电机转子失磁检测方法 |
| CN103328995A (zh) * | 2011-02-03 | 2013-09-25 | 罗伯特·博世有限公司 | 用于识别电机的故障特性的方法和设备 |
| DE102014205254A1 (de) * | 2014-03-20 | 2014-12-31 | Continental Automotive Gmbh | Verfahren und Vorrichtung zum Ermitteln einer Entmagnetisierung eines Permanentmagneten eines Elektromotors, Antriebsanordnung mit der Vorrichtung |
| CN104716887A (zh) * | 2015-04-13 | 2015-06-17 | 南车株洲电力机车研究所有限公司 | 一种永磁同步电机失磁保护方法及系统 |
| CN105021990A (zh) * | 2015-08-19 | 2015-11-04 | 珠海格力电器股份有限公司 | 永磁电机的退磁检测方法、系统和变频器 |
Family Cites Families (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE10124436A1 (de) * | 2001-05-18 | 2002-11-28 | Bosch Gmbh Robert | Bürstenloser Gleichstromantrieb |
| JP4063166B2 (ja) * | 2002-07-31 | 2008-03-19 | 日産自動車株式会社 | 電動機の制御装置 |
| JP5292995B2 (ja) * | 2008-08-22 | 2013-09-18 | 株式会社ジェイテクト | モータ制御装置及び電動パワーステアリング装置 |
| US8610452B2 (en) * | 2010-04-23 | 2013-12-17 | Korea University Research And Business Foundation | Apparatus and method for diagnosing permanent magnet demagnetization of permanent magnet synchronous motor, and apparatus for driving permanent magnet synchronous motor |
| JP5243651B2 (ja) * | 2011-10-12 | 2013-07-24 | ファナック株式会社 | 永久磁石同期電動機のd軸電流を制御するモータ制御装置 |
| KR102246044B1 (ko) * | 2013-12-31 | 2021-04-29 | 현대모비스 주식회사 | 모터 감자 에러 감지 장치 및 방법 |
| DE102014011828A1 (de) * | 2014-08-08 | 2016-02-11 | Daimler Ag | Verfahren und Vorrichtung zur Erwärmung einer Traktionsbatterie in einem Kraftfahrzeug |
-
2016
- 2016-04-29 DE DE102016207375.3A patent/DE102016207375A1/de active Pending
-
2017
- 2017-03-23 US US16/096,852 patent/US10819265B2/en active Active
- 2017-03-23 EP EP17713263.6A patent/EP3449564B1/de active Active
- 2017-03-23 CN CN201780040780.4A patent/CN109429545B/zh active Active
- 2017-03-23 WO PCT/EP2017/056964 patent/WO2017186420A1/de active Application Filing
Patent Citations (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE60036192T2 (de) * | 2000-02-28 | 2008-05-21 | Hitachi, Ltd. | Synchronmotor-Steuervorrichtung und Fahrzeug mit der Steuervorrichtung |
| CA2403329A1 (en) * | 2001-09-17 | 2003-03-17 | Ford Global Technologies, Inc. | Adaptive demagnetization compensation for a motor in an electric or partially electric motor vehicle |
| CN1830135A (zh) * | 2003-07-31 | 2006-09-06 | 丰田自动车株式会社 | 能够准确地估计永磁电机的去磁的电机驱动设备 |
| CN102445610A (zh) * | 2010-09-22 | 2012-05-09 | 山洋电气株式会社 | 电气设备的永久磁体的劣化判定方法及装置 |
| US8587244B2 (en) * | 2010-09-22 | 2013-11-19 | Sanyo Denki Co., Ltd. | Method and system for determining deterioration of permanent magnets of electric apparatus |
| DE102010050344A1 (de) * | 2010-11-05 | 2012-05-10 | Getrag Getriebe- Und Zahnradfabrik Hermann Hagenmeyer Gmbh & Cie Kg | Feldorientierte Regelung einer Drehfeldmaschine |
| CN103328995A (zh) * | 2011-02-03 | 2013-09-25 | 罗伯特·博世有限公司 | 用于识别电机的故障特性的方法和设备 |
| CN102916644A (zh) * | 2012-11-20 | 2013-02-06 | 上海中科深江电动车辆有限公司 | 电动汽车永磁同步电机失磁控制系统及控制方法 |
| CN102944857A (zh) * | 2012-11-23 | 2013-02-27 | 上海中科深江电动车辆有限公司 | 永磁同步电机转子失磁检测方法 |
| DE102014205254A1 (de) * | 2014-03-20 | 2014-12-31 | Continental Automotive Gmbh | Verfahren und Vorrichtung zum Ermitteln einer Entmagnetisierung eines Permanentmagneten eines Elektromotors, Antriebsanordnung mit der Vorrichtung |
| CN104716887A (zh) * | 2015-04-13 | 2015-06-17 | 南车株洲电力机车研究所有限公司 | 一种永磁同步电机失磁保护方法及系统 |
| CN105021990A (zh) * | 2015-08-19 | 2015-11-04 | 珠海格力电器股份有限公司 | 永磁电机的退磁检测方法、系统和变频器 |
Non-Patent Citations (1)
| Title |
|---|
| 电动汽车PMSM退磁故障机理、诊断及发展;李红梅,等;《电工技术学报》;20130831;第28卷(第8期);第276-284页 * |
Also Published As
| Publication number | Publication date |
|---|---|
| EP3449564A1 (de) | 2019-03-06 |
| US20190229662A1 (en) | 2019-07-25 |
| EP3449564B1 (de) | 2020-08-12 |
| DE102016207375A1 (de) | 2017-11-02 |
| WO2017186420A1 (de) | 2017-11-02 |
| US10819265B2 (en) | 2020-10-27 |
| CN109429545A (zh) | 2019-03-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2192684B1 (en) | Variable magnetic flux drive system | |
| US7746013B2 (en) | Method and device for controlling a brushless direct-current motor | |
| US7342379B2 (en) | Sensorless control systems and methods for permanent magnet rotating machines | |
| JP5422527B2 (ja) | ブラシレスモータ制御装置及びブラシレスモータシステム | |
| JP6030466B2 (ja) | ブラシレスモータの駆動装置 | |
| US10148208B2 (en) | Control device for an electric machine, a vehicle, and a method | |
| US8890451B2 (en) | Sensorless control unit for brushless DC motor | |
| JP2007215277A (ja) | 車両用発電制御装置 | |
| KR20140128345A (ko) | 전기 기계의 온도에 기초하여 전기 기계의 전력 공급을 제어하는 방법 및 시스템 | |
| US20070090783A1 (en) | Method for braking a synchronous machine | |
| KR20190108301A (ko) | 모터 회전속도 제어방법 및 제어시스템 | |
| JP2016189647A (ja) | 電動機システム | |
| JP4675299B2 (ja) | 車両用回転電機の制御装置 | |
| KR20040036509A (ko) | 차량용 회전전기의 제어법 | |
| US8729840B2 (en) | Sensorless control unit for brushless DC motor | |
| CN109429545B (zh) | 用于对电机进行控制的方法和装置 | |
| EP3073629B1 (en) | Power conversion device and control method for permanent magnet synchronous motor | |
| CN109687793B (zh) | 电动机控制装置 | |
| CN111344942A (zh) | 用于运行电机以输出预先给定的转矩和预先给定的转速的方法和设备 | |
| US10243495B2 (en) | Controller for a separately excited electric generator in a vehicle electrical system of a motor vehicle | |
| JP6656404B2 (ja) | 発電電動機の制御装置および発電電動機の制御方法 | |
| US11456683B2 (en) | Method for a network synchronization of a permanently excited three-phase machine comprising a soft starter which comprises thyristors | |
| WO2008005363A2 (en) | Parking control technique for permanent magnet motor drives with sinusoidal bemf | |
| CN109478862B (zh) | 旋转电机的控制装置及控制方法 | |
| JP2020018151A (ja) | モータ制御装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |