CN107948657B - 选择运动矢量预测值的方法和使用其的设备 - Google Patents
选择运动矢量预测值的方法和使用其的设备 Download PDFInfo
- Publication number
- CN107948657B CN107948657B CN201711159081.XA CN201711159081A CN107948657B CN 107948657 B CN107948657 B CN 107948657B CN 201711159081 A CN201711159081 A CN 201711159081A CN 107948657 B CN107948657 B CN 107948657B
- Authority
- CN
- China
- Prior art keywords
- block
- condition
- motion vector
- reference picture
- current block
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images






Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/503—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving temporal prediction
- H04N19/51—Motion estimation or motion compensation
- H04N19/56—Motion estimation with initialisation of the vector search, e.g. estimating a good candidate to initiate a search
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/102—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or selection affected or controlled by the adaptive coding
- H04N19/103—Selection of coding mode or of prediction mode
- H04N19/105—Selection of the reference unit for prediction within a chosen coding or prediction mode, e.g. adaptive choice of position and number of pixels used for prediction
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/503—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving temporal prediction
- H04N19/51—Motion estimation or motion compensation
- H04N19/513—Processing of motion vectors
- H04N19/517—Processing of motion vectors by encoding
- H04N19/52—Processing of motion vectors by encoding by predictive encoding
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/102—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or selection affected or controlled by the adaptive coding
- H04N19/103—Selection of coding mode or of prediction mode
- H04N19/107—Selection of coding mode or of prediction mode between spatial and temporal predictive coding, e.g. picture refresh
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/102—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or selection affected or controlled by the adaptive coding
- H04N19/117—Filters, e.g. for pre-processing or post-processing
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/102—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or selection affected or controlled by the adaptive coding
- H04N19/124—Quantisation
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/102—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or selection affected or controlled by the adaptive coding
- H04N19/13—Adaptive entropy coding, e.g. adaptive variable length coding [AVLC] or context adaptive binary arithmetic coding [CABAC]
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/134—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the element, parameter or criterion affecting or controlling the adaptive coding
- H04N19/136—Incoming video signal characteristics or properties
- H04N19/137—Motion inside a coding unit, e.g. average field, frame or block difference
- H04N19/139—Analysis of motion vectors, e.g. their magnitude, direction, variance or reliability
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/169—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding
- H04N19/17—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding the unit being an image region, e.g. an object
- H04N19/176—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding the unit being an image region, e.g. an object the region being a block, e.g. a macroblock
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/10—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding
- H04N19/169—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding
- H04N19/182—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using adaptive coding characterised by the coding unit, i.e. the structural portion or semantic portion of the video signal being the object or the subject of the adaptive coding the unit being a pixel
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/44—Decoders specially adapted therefor, e.g. video decoders which are asymmetric with respect to the encoder
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/503—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving temporal prediction
- H04N19/51—Motion estimation or motion compensation
- H04N19/513—Processing of motion vectors
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/50—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding
- H04N19/503—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using predictive coding involving temporal prediction
- H04N19/51—Motion estimation or motion compensation
- H04N19/513—Processing of motion vectors
- H04N19/521—Processing of motion vectors for estimating the reliability of the determined motion vectors or motion vector field, e.g. for smoothing the motion vector field or for correcting motion vectors
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N19/00—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals
- H04N19/60—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using transform coding
- H04N19/61—Methods or arrangements for coding, decoding, compressing or decompressing digital video signals using transform coding in combination with predictive coding
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Signal Processing (AREA)
- Compression Or Coding Systems Of Tv Signals (AREA)
Abstract
本发明涉及选择运动矢量预测值的方法和使用其的设备。本发明涉及一种用于选择运动矢量预测值的方法,并且包括:选择用于当前块的运动矢量预测值候选的步骤,和从运动矢量预测值候选选择用于当前块的运动矢量预测值的步骤,其中用于当前块的运动矢量预测值候选包括在围绕当前块的左侧的块当中被最先搜索为可用块的第一候选块的运动矢量,以及在围绕当前块的上侧的块当中被最先搜索为可用块的第二候选块的运动矢量。
Description
本申请是2013年11月14日提交的国际申请日为2012年3月21日的申请号为201280023199.9(PCT/KR2012/001999)的,发明名称为“选择运动矢量预测值的方法和使用其的设备”专利申请的分案申请。
技术领域
本发明涉及视频(运动图片)压缩技术,尤其是,涉及使用其邻近块的信息预测当前块的信息的方法。
背景技术
近年来,对高分辨率和高质量图像的需求在各种应用领域中已经增长。由于图像具有更高的分辨率和更高的质量,有关图像的数据量增长得越来越多。因此,当使用介质,诸如现有的有线或者无线宽带线路传输视频数据,或者视频数据存储在现有的存储介质中的时候,数据的传输成本和存储成本增长。
为了有效地传输、存储和再现有关高分辨率和高质量视频的信息,可以使用高效的视频压缩技术。
为了提高视频压缩效率,可以使用在无需传输当前块的信息的情况下,使用当前块的邻近块的信息来预测当前块的信息的方法。
中间预测(inter prediction)和内部预测(intra prediction)可以用作预测方法。
在中间预测中,参考其他图片的信息预测当前图片的像素值。在内部预测中,使用在相同的图片中的像素间关系预测当前图片的像素值。
当执行中间预测的时候,可以使用在中间预测模式中表示参考图片的信息和表示来自邻近块的运动矢量的信息,以指定另一个图片的一部分将被用于预测。
发明内容
技术问题
本发明的一个目的是提供一种预测方法和使用该预测方法的设备,该预测方法可以提高压缩效率,并且降低要发送的数据量,并且其可以在编码/解码视频(运动图片)的过程中降低复杂性。
本发明的另一个目的是提供一种扫描邻近块以便有效地使用邻近信息来构建当前块的运动信息预测值候选的方法,和使用该扫描方法的设备。
本发明的另一个目的是提供一种缩放运动信息,以便将从邻近块获得的运动信息用作为当前块的运动信息预测值候选的方法,和使用该缩放方法的设备。
问题的解决方案
(1)按照本发明的一个方面,提供了一种选择运动矢量预测值的方法,包括步骤:选择用于当前块的运动矢量预测值候选;和在运动矢量预测值候选当中选择当前块的运动矢量预测值,其中用于当前块的运动矢量预测值候选包括当前块的左侧邻近块当中的被最先搜索为可用块的第一候选块的运动矢量,以及当前块的上侧邻近块当中的被最先搜索为可用块的第二候选块的运动矢量。
(2)在按照(1)选择运动矢量预测值的方法中,可用块可以是满足以下条件中的任何一个的块,:块具有与当前块的参考图片相同的参考图片以及与当前块的参考图片列表相同的参考图片列表的第一条件,块具有与当前块的参考图片相同的参考图片以及与当前块的参考图片列表不同的参考图片列表的第二条件,块具有与当前块的参考图片不同的参考图片以及与当前块的参考图片列表相同的参考图片列表的第三条件,和块具有与当前块的参考图片不同的参考图片以及与当前块的参考图片列表不同的参考图片列表的第四条件,并且可用块可以是被应用中间预测模式的块。
(3)在按照(2)选择运动矢量预测值的方法中,选择当前块的运动矢量预测值的步骤可以包括搜索具有较高优先级的运动矢量预测值,所述较高优先级被赋予第一至第四条件中的较早编号。
(4)在按照(2)选择运动矢量预测值的方法中,满足第三条件或者第四条件的第一候选块或者第二候选块的运动矢量可以被缩放。
(5)在按照(4)选择运动矢量预测值的方法中,可以基于当前块所属于的当前图片和当前块的参考图片之间的距离,以及当前图片和满足第三条件或者第四条件的第一候选块或者第二候选块的参考图片之间的距离,执行缩放。
(6)在按照(4)选择运动矢量预测值的方法中,缩放的次数可以限于预先确定的次数。
(7)在按照(1)选择运动矢量预测值的方法中,左侧邻近块可以包括位于当前块的左下角的第一邻近块,和位于当前块的左下侧的第二邻近块。
(8)在按照(7)选择运动矢量预测值的方法中,选择当前块的运动矢量预测值候选的步骤可以包括:以第一至第四条件的顺序确定第一邻近块和第二邻近块是否满足以下条件中的任何一个的条件确定步骤:块具有与当前块的参考图片相同的参考图片以及与当前块的参考图片列表相同的参考图片列表的第一条件,块具有与当前块的参考图片相同的参考图片以及与当前块的参考图片列表不同的参考图片列表的第二条件,块具有与当前块的参考图片不同的参考图片以及与当前块的参考图片列表相同的参考图片列表的第三条件,和块具有与当前块的参考图片不同的参考图片以及与当前块的参考图片列表不同的参考图片列表的第四条件;和将被最先搜索为满足第一至第四条件中的任何一个的块确定为第一候选块的候选块确定步骤。
(9)在按照(8)选择运动矢量预测值的方法中,条件确定步骤可以包括步骤:确定第一邻近块是否满足第一条件和第二条件;确定第二邻近块是否满足第一条件和第二条件;确定第一邻近块是否满足第三条件和第四条件;和确定第二邻近块是否满足第三条件和第四条件。
(10)在按照(1)选择运动矢量预测值的方法中,上侧邻近块可以包括位于当前块的右上角的第三邻近块,位于当前块的右上侧的第四邻近块,和位于当前块的左上角的第五邻近块。
(11)在按照(10)选择运动矢量预测值的方法中,选择当前块的运动矢量预测值候选的步骤可以包括:以第一至第四条件的顺序确定第三邻近块、第四邻近块,和第五邻近块是否满足以下条件中的任何一个的条件确定步骤:块具有与当前块的参考图片相同的参考图片以及与当前块的参考图片列表相同的参考图片列表的第一条件,块具有与当前块的参考图片相同的参考图片以及与当前块的参考图片列表不同的参考图片列表的第二条件,块具有与当前块的参考图片不同的参考图片以及与当前块的参考图片列表相同的参考图片列表的第三条件,和块具有与当前块的参考图片不同的参考图片以及与当前块的参考图片列表不同的参考图片列表的第四条件;和将被最先搜索为满足第一至第四条件中的任何一个的块确定为第二候选块的候选块确定步骤。
(12)在按照(11)选择运动矢量预测值的方法中,条件确定步骤可以包括步骤:确定第三邻近块是否满足第一条件和第二条件;确定第四邻近块是否满足第一条件和第二条件;确定第五邻近块是否满足第一条件和第二条件;确定第三邻近块是否满足第三条件和第四条件;确定第四邻近块是否满足第三条件和第四条件;和确定第五邻近块是否满足第三条件和第四条件。
(13)按照本发明的另一个方面,提供了一种解码设备,包括:预测模块,该预测模块对当前块执行预测;和存储器,该存储器存储有关当前块的邻近块的信息,其中预测模块选择用于当前块的运动矢量预测值候选,并且在运动矢量预测值候选当中选择当前块的运动矢量预测值,并且其中用于当前块的运动矢量预测值候选包括当前块的左侧邻近块当中的被最先搜索为可用块的第一候选块的运动矢量,以及当前块的上侧邻近块当中的被最先搜索为可用块的第二候选块的运动矢量。
(14)在按照(13)的解码设备中,可用块可以是满足以下条件中的任何一个的块:块具有与当前块的参考图片相同的参考图片以及与当前块的参考图片列表相同的参考图片列表的第一条件,块具有与当前块的参考图片相同的参考图片以及与当前块的参考图片列表不同的参考图片列表的第二条件,块具有与当前块的参考图片不同的参考图片以及与当前块的参考图片列表相同的参考图片列表的第三条件,和块具有与当前块的参考图片不同的参考图片以及与当前块的参考图片列表不同的参考图片列表的第四条件,并且可用块可以是被应用中间预测模式的块,预测模块可以搜索具有较高优先级的运动矢量预测值,所述较高优先级被赋予第一至第四条件中的较早编号。
(15)在按照(14)的解码设备中,预测模块可以缩放满足第三条件或者第四条件的第一候选块或者第二候选块的运动矢量。
有益效果
按照由本发明提供的预测方法,可以提高压缩效率,减少要发送的数据量,并且在编码/解码视频(运动图片)的过程中降低复杂度。
按照由本发明提供的预测方法,可以有效地使用邻近块的信息来推导当前块的运动信息预测值候选。
按照由本发明提供的预测方法,可以缩放从邻近块获得的运动信息,并且将缩放的运动信息用作为当前块的运动信息预测值候选。
附图说明
图1是按照本发明的一个实施例示意地举例说明视频编码设备(编码器)的方框图。
图2是按照本发明的一个实施例示意地举例说明视频解码设备(解码器)的方框图。
图3是示意地举例说明当在中间预测模式中应用高级运动矢量预测值(AMVP)的时候,推导运动矢量的方法的例子的流程图。
图4是示意地举例说明用于产生MVP候选列表的方法的例子的示意图。
图5是按照本发明的一个实施例示意地举例说明缩放方法的示意图。
图6是按照本发明的实施例示意地举例说明缩放方法的流程图。
图7是示意地举例说明在当前图片(当前帧)中缩放当前块的邻近块的运动矢量的方法的示意图。
图8是按照本发明的一个实施例示意地举例说明执行运动矢量竞争的方法的示意图。
图9是按照本发明的一个实施例示意地举例说明应用AMVP的方法的示意图。
图10是按照本发明的一个实施例示意地举例说明选择当前块的运动矢量预测值的方法的流程图。
具体实施方式
本发明可以以各种形式不同地修改,并且可以具有各种实施例,将详细描述其特定的实施例,并且在附图中示出。但是,实施例不意欲限制本发明。在以下的描述中使用的术语仅仅用于描述特定的实施例,但是,不意欲限制本发明的技术精神。单数的表示包括复数的表示,只要其被清楚地不同地理解。术语,诸如“包括”和“具有”意欲表示存在在以下的描述中使用的特点、数目、步骤、操作、元件、组件,或者其组合,并且因此应该理解,不排除存在或者增加一个或多个不同的特点、数目、步骤、操作、元件、组件,或者其组合的可能性。
另一方面,在本发明描述的附图中的元件为了解释不同特定功能的便利的目的在视频编码/解码设备中独立地绘制,并且不意味该元件由独立的硬件或者独立的软件实施。例如,该元件中的两个或更多个元件可以合并以形成单个元件,或者一个元件可以被分成多个元件。不脱离本发明的概念,元件被合并和/或被划分的实施例属于本发明的范围。
在下文中,将参考伴随的附图详细描述本发明示范的实施例。
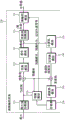
图1是按照本发明的一个实施例示意地举例说明视频编码设备(编码器)的方框图。参考图1,视频编码设备100包括图片划分模块105、预测模块110、变换模块115、量化模块120、重新排列模块125、熵编码模块130、反量化模块135、反变换模块140、滤波器模块145,和存储器150。
该图片划分模块105可以将输入图片划分为至少一个处理单元。在这里,该处理单元可以是预测单元(在下文中,称为“PU”),变换单元(在下文中,称为“TU”),或者编码单元(在下文中,称为“CU”)。在本说明书中,为了解释便利的目的,预测单元可以由预测块表示,变换单元可以由变换块表示,编码单元可以由编码块表示。
该预测模块110包括执行中间预测处理的中间预测模块,和执行内部预测处理的内部预测模块。为了提高编码效率,图片信号不是没有任何变化地编码,而是被编码以便通过使用预先编码的区域来预测图片,以及将原始图片和预测图片之间的残留值添加到预测图片来重建图片。
由于图片包括用于预测的预先编码的区域,I图片(I条带(slice))、P图片(P条带)、B图片(B条带)等等是已知的。I条带是仅仅经由内部预测解码的条带。P条带是可以使用至少一个运动矢量和参考图片索引经由中间预测或者内部预测来解码以便预测块的采样值的条带。B条带是可以使用至少两个运动矢量和参考图片索引经由中间预测或者内部预测来解码以便预测块的采样值的条带。
该预测模块110对图片的处理单元执行预测处理,以创建包括预测的采样的预测块。在预测模块110中,图片的处理单元可以是CU、TU或者PU。可以确定对相应的处理单元执行的预测是中间预测还是内部预测,并且可以确定预测方法的特定细节(例如,预测模式)。经历预测处理的处理单元可以不同于预测方法和特定细节被确定的处理单元。例如,预测方法和预测模式可以通过PU单元确定,并且预测处理可以通过TU单元执行。
在中间预测中,基于与当前图片的先前图片和/或后续图片中的至少一个有关的信息来执行预测处理以创建预测块。在内部预测中,基于当前图片的像素信息执行预测处理以创建预测块。
在中间预测中,参考图片被选择用于当前块,并且具有与当前块相同大小的参考块被选择以创建当前块的预测块。例如,在中间预测中,预测块可以被创建以便将与当前块的残留信号减到最小,并且将运动矢量的幅值减到最小。另一方面,跳过模式、合并模式、AMVP(高级运动矢量预测)等等可以用作内部预测方法。可以以小于整数像素,诸如1/2像素采样和1/4像素采样的像素采样为单位创建预测块。在这里,也可以以小于整数像素的像素采样为单位表示运动矢量。例如,可以以1/4像素为单位表示亮度像素,并且可以以1/8像素为单位表示色度像素。
信息,诸如经由中间预测选择的参考图片的索引、运动矢量预测值,以及残留信号,被熵编码,并且被发送给解码器。
当执行内部预测的时候,经历预测处理的处理单元可以不同于预测方法和特定细节被确定的处理单元。例如,预测模式可以以PU为单位确定,并且预测处理可以以PU为单位执行。做为选择,预测模式可以以PU为单位确定,并且中间预测可以以TU为单位执行。
内部预测中的预测模式包括33个定向预测模式和至少两个非定向模式。非定向模式包括DC预测模式和平面模式。
在内部预测中,可以在对参考采样应用滤波器之后创建预测块。此时,取决于内部预测模式和/或当前块的大小,可以确定滤波器是否应被应用于参考采样。
可以从CU(其没有再被划分)以各种大小/形状确定PU。例如,在中间预测的情况下,PU可以具有诸如2N×2N、2N×N、N×2N和N×N的大小。在内部预测的情况下,PU可以具有诸如2N×2N和N×N(这里N是整数)的大小。具有N×N大小的PU可以被设置为仅仅应用于特定的情形。例如,具有N×N大小的PU可以被设置为仅仅用于具有最小大小的编码单元,或者可以被设置为仅仅用于内部预测。除了具有以上提及的大小的PU之外,具有诸如N×mN、mN×N、2N×mN和mN×2N(这里m<1)大小的PU可以被另外限定和使用。
在创建的预测块和原始块之间的残留值(例如,残留块或者残留信号)被输入给变换模块115。用于预测的预测模式信息、运动矢量信息等等通过熵编码模块130与残留值一起被编码,并且被发送给解码器。
该变换模块115以TU为单位对残留块执行变换处理,并且创建变换系数。在变换模块115中的变换单元可以是TU,并且可以具有四叉树结构。可以在预先确定的最大和最小的大小范围内确定变换单元的大小。该变换模块115可以使用DCT(离散余弦变换)和/或DST(离散正弦变换)变换残留块。
该量化模块120可以量化由变换模块115变换的残留值,并且可以创建量化系数。由量化模块120计算的值可以提供给反量化模块135和重新排列模块125。
该重新排列模块125可以重新排列从量化模块120提供的量化系数。通过重新排列该量化系数,可以提高在熵编码模块130中的编码效率。该重新排列模块125可以通过使用系数扫描方法,将二维块的形式的量化系数重新排列为一维矢量的形式。该重新排列模块125可以基于从量化模块发送的系数的随机统计数值,通过改变系数扫描的顺序来提高在熵编码模块130中的熵编码效率。
该熵编码模块130可以对通过重新排列模块125重新排列的量化系数执行熵编码处理。熵编码方法的例子包括指数golomb方法、CAVLC(上下文自适应的可变长度编码)方法,和CABAC(上下文自适应的二进制算数编码)方法。该熵编码模块130可以编码各种信息,诸如从重新排列模块125和预测模块110发送的编码单元的残留系数信息和块类型信息、预测模式信息、划分单元信息、预测单元信息、传输单元信息、运动矢量信息、参考图片信息、块内插信息,和滤波信息。
必要时,该熵编码模块130可以将预先确定的变化赋予要发送的参数集或者语法。
该反量化模块135反向地量化由量化模块120量化的值。该反变换模块140反向地变换由反量化模块135反向量化的值。由反量化模块135和反变换模块140创建的残留值与预测模块110预测的预测块合并,以创建重建块。
该滤波器模块145将去块滤波器、ALF(自适应环路滤波器)、SAO(采样自适应偏移)应用于重建的图片。
该去块滤波器在重建的图片中去除在块之间的边界上产生的块失真。ALF基于原始图片与重建图片(它的块被去块滤波器滤波)的比较的结果值执行滤波处理。只有当高效率是必需的时可以应用ALF。SAO重建在应用了去块滤波器的残留块和原始图片之间的偏移差,并且以频带偏移、边缘偏移等等的形式被应用。
另一方面,该滤波器模块145可以不对用于中间预测的重建块执行滤波处理。
该存储器150存储重建块或者由滤波器模块145计算的图片。存储在存储器150中的重建的块或者图片被提供给执行中间预测的预测模块110。
图2是按照本发明的一个实施例示意地举例说明视频解码设备(解码器)的方框图。参考图2,视频解码设备200包括熵解码模块210、重新排列模块215、反量化模块220、反变换模块225、预测模块230、滤波器模块235,和存储器240。
当图片比特流从编码器输入的时候,可以以由编码器处理视频信息的顺序相反的顺序来解码输入的比特流。
例如,当视频编码设备使用可变长度编码(在下文中,称为“VLC”)方法,诸如CAVLC去执行熵编码处理的时候,视频解码模块210可以实现与在视频编码设备中使用的VLC表相同的VLC表,并且可以执行熵解码处理。当视频编码设备使用CABAC去执行熵编码处理的时候,熵解码模块210可以使用对应于其的CABAC执行熵解码处理。
用于在由熵解码模块210解码的信息中创建预测块的信息被提供给预测模块230,并且由熵解码模块熵解码的残留值被输入给重新排列模块215。
该重新排列模块215基于在视频编码设备中的重新排列方法来重新排列由熵解码模块210熵解码的比特流。该重新排列模块215将以一维矢量的形式表示的系数重建和重新排列为以二维块的形式的系数。该重新排列模块215被提供以与由编码器执行的系数扫描有关的信息,并且可以基于由编码器执行扫描的扫描顺序使用反向地扫描系数的方法来执行重新排列。
该反量化模块220基于从编码器提供的量化参数和块的重新排列的系数值来执行反量化。
该反变换模块225对由视频编码设备产生的量化执行DCT和DST(其已经由视频编码设备的变换模块执行)的反DCT和反DST。基于由视频编码设备确定的图片的传输单元或者划分单元来执行反变换。该视频编码设备的变换模块可以取决于多个信息元素,诸如预测方法、当前块的大小和预测方向,有选择地执行DCT和DST,并且该视频解码设备的反变换模块225基于与由视频编码设备的变换模块执行的变换有关的变换信息执行反变换。
该预测模块230可以基于从熵解码模块210提供的预测块创建信息,以及从存储器240提供的先前解码的块和/或图片信息来创建预测块。可以使用由预测模块230创建的预测块和从反变换模块225提供的残留块创建重建块。
由预测模块230执行的特定预测方法与由编码器的预测模块执行的预测方法相同。
当当前块的预测模式是内部预测模式的时候,创建预测块的内部预测过程可以基于当前图片的像素信息来执行。
内部预测中的预测模式包括33个定向预测模式和至少两个非定向模式。非定向模式包括DC预测模式和平面模式。
在内部预测中,可以在将滤波器应用于参考采样之后创建预测块。此时,取决于内部预测模式和/或当前块的大小,可以确定是否将滤波器应用于参考采样。
当用于当前块的预测模式是中间预测模式的时候,当前图片的先前图片和后续图片中的至少一个被用作参考图片,并且基于包括在参考图片中的信息对当前块执行中间预测处理。特别地,在中间预测中,用于当前块的参考图片被选择,具有与当前块相同大小的基准块被选择,并且当前块的预测块被创建。例如,在中间预测中,可以创建预测块以便将与当前块的残留信号减到最小,并且将运动矢量的幅值减到最小。当前图片的邻近块的信息被用于使用参考图片的信息。例如,通过使用跳过模式、合并模式、AMVP(高级运动矢量预测)模式等等基于邻近块的信息创建当前块的预测块。
可以以小于整数像素的像素采样,诸如1/2像素采样和1/4像素采样为单位创建预测块。在这里,也可以以小于整数像素的像素采样为单位表示运动矢量。例如,亮度像素可以以1/4像素为单位表示,并且色度像素可以以1/8像素为单位表示。
为当前块的中间预测所必需的运动信息,例如,有关运动矢量、参考图片索引等等的信息可以从接收自编码器的跳过标记、合并标记等等而推导出。
经历预测处理的处理单元可以不同于预测方法和特定细节被确定的处理单元。例如,预测模式可以以PU为单位确定,并且预测处理可以以PU为单位执行。做为选择,预测模式可以以PU为单位确定,并且中间预测可以以TU为单位执行。
从反变换模块225输出的残留块被加到从预测模块230输出的预测块,以重建原始图片。
重建的块和/或图片被提供给滤波器模块235。该滤波器模块235对重建的块和/或图片执行去块滤波处理、SAO(采样自适应偏移)处理,和/或自适应环路滤波处理。
该存储器240存储重建的图片或者块,以用作为参考图片或者参考块,并且将重建的图片提供给输出模块。
虽然为解释便利的目的没有描述,但输入给解码器的比特流可以经由解析步骤输入给熵解码模块。该解析步骤可以由熵解码模块执行。
在本说明书中,编译有时候可以作为编码或者解码来分析,并且信息可以理解为包括值、参数、系数、元素等等的全部。
“帧”或者“图片”指的是用于表示特定时间区域的视频(图像)的单元,并且“条带”、“帧”等等指的是在实际编码视频信号中构成图片一部分的单元,并且有时候可以与图片相混。
“像素”或者“像元”指的是构成图片的最小单元。“采样”可以用作表示特定像素的值的术语。采样可以被划分为亮度分量和色度分量,并且通常用作为包括两者的术语。色度分量表示在确定的颜色之间的差别,并且通常包括Cb和Cr。
“单元”用作表示视频处理的基本单元或者图片的特定位置的术语,诸如预测单元(PU)和变换单元(TU),并且依据情形可以与术语“块”和“区域”相混。在通常情形下,块用作表示以M列和N行布置的一组采样或者变换系数的术语。
另一方面,在中间预测模式的情况下,解码器和编码器提取当前块的运动信息,并且基于提取的运动信息对当前块执行中间预测。
用于预测当前块的图片称为参考图片或者参考帧。在参考图片中的区域可以使用用于表示参考图片和运动矢量的参考图片索引(refIdx)来表示。
用于当前图片的参考图片列表可以由用于预测的图片构成,并且参考图片索引表示在参考图片列表中的特定参考图片。P图片需要单个参考图片列表,诸如参考列表0,并且B图片需要两个参考图片列表,诸如参考列表0和参考列表1。
特别地,I图片是经由内部预测而编码/解码的图片。P图片是可以使用至少一个运动矢量和参考图片索引经由中间预测或者内部预测而编码/解码,以预测块的采样值的图片。B图片是可以使用至少两个运动矢量和参考图片索引经由中间预测或者内部预测而编码/解码,以预测模块的采样值的图片。
P图片需要一个参考图片列表,其称作参考图片列表0(L0)。
B图片是可以使用两个参考图片例如经由前向、后向和双向中间预测而编码的图片。B图片需要两个参考图片列表,其称作参考图片列表0(L0)和参考图片列表1(L1)。
使用从L0中选择的参考图片的中间预测称作L0预测。L0预测主要地用于前向预测。使用从L1中选择的参考图片的中间预测称作L1预测。L1预测主要地用于后向预测。使用从L0和L1中选择的两个参考图片的中间预测称作双向预测。
I图片、P图片和B图片的特点可以以条带为单位,而不以图片为单位来定义。例如,以条带为单位的具有I图片特点的I条带、具有P图片特点的P条带,和具有B图片特点的B条带可以被定义。
例如,当当前块的条带类型是B的时候,colPic是从L0中选择出来的,或者当当前块的条带类型是P的时候,colPic可以是从L0中选择出来的。
另一方面,为了防止低迟延,GPB(广义的P和B(Generalized P and B))条带可以被使用。在GPB中,参考图片列表0和参考图片列表1彼此相同。
在中间预测中,在跳过模式中邻近块的信息可以无需任何变化被用于当前块。因此,在跳过模式中,除了表示什么块的运动信息将用作为当前块的运动信息的信息以外的诸如残留值的语法信息不被发送。
在合并模式中,邻近块的运动信息没有任何变化地被使用,以创建当前块的预测块。该编码器发送有关是否应该应用合并模式的信息、有关应使用什么块的运动信息的信息、残留信息等等。该解码器将从编码器发送的残留块加到预测块,以重建当前块。
表示在合并模式等等中应使用什么块的信息的方法可以被应用于跳过模式和常规的中间预测模式。例如,具有在合并模式中将被用作当前块的运动信息的信息的候选块可以被公共地用于其它的中间预测模式,并且表示应使用什么邻近块的运动信息的方法可以同等地使用。
此时,在跳过模式和常规的中间预测模式中,只有当邻近块的参考图片索引或者预测方向(参考图片列表)与当前块的参考图片索引或者预测方向(参考图片列表)匹配时,邻近块可以被确定为具有可用的运动信息,并且相应的邻近块的运动矢量可以用作为用于当前块的运动矢量预测值候选。做为选择,邻近块的运动矢量可以被缩放,并且用作为用于当前块的运动矢量预测值候选。
在AMVP模式中,编码器可以使用邻近块的运动信息预测当前块的运动矢量,并且可以与表示参考图片的参考图片索引一起发送在当前块的运动矢量和预测的运动矢量之间的差。该解码器使用邻近块的运动信息预测当前块的运动矢量,并且使用从编码器接收的残留推导出当前块的运动矢量。该解码器基于推导出的运动矢量和从编码器接收的参考图片索引信息,创建当前块的预测块。
图3是示意地举例说明当AMVP(高级运动矢量预测值)模式作为中间预测模式来应用的时候,推导运动矢量的方法的例子的流程图。
参考图3,编码器或者解码器可以构建当前块的运动矢量预测值(MVP)候选列表(S310)。运动矢量预测值可以表示当前块的运动矢量的预测值。
该编码器或者解码器可以使用在邻近于当前块的可用邻近块中的可用邻近块(为了解释便利的目的,在下文中,称为“Col模块”(共址块)(co-located block))的运动矢量,和/或位于与当前块相同位置(共址)的每个参考图片的可用块的运动矢量,来构建MVP候选列表。
该编码器和解码器可以在MVP候选列表中所包括的MVP候选当中选择当前块的MVP(S320)。
该编码器可以通过对包括在MVP候选列表中的MVP候选应用运动矢量竞争(MVC)来选择当前块的最佳MVP。该编码器可以经由比特流将选择的MVP索引、MVD(运动矢量差,其也称作运动矢量的差(DMV)),和参考图片索引发送给解码器。MVP索引是表示当前块的MVP的索引,并且可以表示包括在MVP候选列表中的MVP候选中的任何一个。该参考图片索引是表示当前块的参考图片的索引,并且表示包括在参考图片列表中的参考图片候选中的任何一个。MVD表示在当前块的运动矢量和选择的MVP之间的差。当MVD的值变得较小时,要发送的数据量变得较小。
该解码器可以从编码器接收MVP索引和参考图片索引。该解码器可以使用接收的MVP索引在包括在MVP候选列表中的MVP候选当中选择当前块的MVP。该解码器可以使用接收的参考图片索引在包括在参考图片列表中的参考图片候选当中选择当前块的参考图片。
该解码器可以与接收的MVD一起,使用选择的MVP和选择的参考图片推导当前块的运动矢量(S330)。例如,该解码器将接收的MVD加到MVP,以重建当前块的运动矢量。
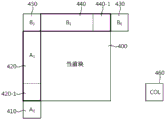
图4是示意地举例说明用于创建MVP候选列表的方法的例子的示意图。
为了解释便利的目的,包括左下邻近块A0 410(其是在当前块400的左下角的邻近块)和当前块400的左侧邻近块A1 420的候选组被称作左侧候选组。在这里,该编码器或者解码器可以仅仅使用左侧邻近块420当中的在特定位置的块。例如,该编码器或者解码器可以将左侧邻近块420中的最下块420-1设置为左侧块A1。
包括右上邻近块B0 430(其是在当前块400的右上角的邻近块)、当前块400的上侧邻近块B1 440、以及左上邻近块B2 450(其是在当前块400的左上角的邻近块)的候选组被称作上侧候选组。该编码器或者解码器可以仅仅使用上侧块440当中的在特定位置的块。例如,该编码器或者解码器可以将上侧邻近块当中的最右块440-1设置为上侧块B1。
该编码器和解码器可以从左侧候选组A0和A1中选择一个MVP候选。从左侧候选组中选择出来的MVP候选被称作MVA。例如,在以A0→A1的顺序扫描包括在左侧候选块中的块时,该编码器或者解码器确定参考图片索引与当前块的的相同性,参考图片列表与当前块的的相同性等等,并且将第一可用块的运动矢量选择为当前块的MVP候选MVA。
该编码器或者解码器也从上侧候选组B0、B1和B2中选择一个MVP候选。从上侧候选组中选择出来的MVP候选被称作MVB。例如,在以B0→B1→B2的顺序扫描包括在左侧候选块中的块时,该编码器或者解码器确定参考图片索引与当前块的的相同性,参考图片列表与当前块的的相同性等等,并且将第一可用块的运动矢量选择为当前块的MVP候选MVB。
该编码器或者解码器可以将在参考图片中的Col块COL 460的运动矢量选择为当前块的MVP候选。在这里,Col块660的运动矢量由mvCol表示。在这里,当在搜索MVA和MVB的过程中没有确保必需数目的空间候选的时候,该编码器或者解码器可以将Col块的运动矢量设置为MVP候选。
在以上提及的实施例中,从左侧候选组中选择出来的MVP候选和从上侧候选组中选择出来的MVP候选被称为空间运动矢量预测值(在下文中,称为“SMVP”)。使用参考图片中的Col块选择的MVP候选被称为时间运动矢量预测值(在下文中,称为“TMVP”)。因此,MVP候选列表包括SMVP和/或TMVP。
当在由以上提及的方法选择的MVP候选当中存在重叠候选的时候,该编码器或者解码器去除重叠候选当中的、除了最高等级的候选以外的候选。
如上所述,候选组被划分为左侧候选组A0和A1,以及上侧候选组B0、B1和B2,但是,候选组不局限于这种划分。例如,左侧候选组可以仅仅包括A1,上侧候选组可以仅仅包括B1,并且可以构建包括A0、B0和B2的角落候选组。当候选组被划分为左侧候选组、上侧候选组和角落候选组的时候,可以确定参考图片索引与当前块的的相同性、参考图片列表与当前块的的相同性等等,并且用于当前块的预先确定数目的MVP候选可以被选择。
此时,为了进一步准确地预测当前块的运动矢量,从邻近块中选择出来的运动矢量(邻近运动矢量)可以被缩放。
例如,当没有具有与当前块的运动矢量MVC的参考帧(参考图片)相对应的参考帧(参考图片)的邻近块的时候,邻近块的运动矢量可以被缩放,以创建运动矢量预测值(PMV)(运动矢量的预测值)或者MVP(运动矢量预测值)。
图5是按照本发明的一个实施例举例说明缩放方法的示意图,并且示意地示出在当前块及其邻近块之间的关系。为了解释便利的目的,将参考图5描述考虑到当前块510的左侧邻近块、上侧邻近块和角落邻近块中的每个,缩放运动矢量的方法的例子。在图5中,在角落块当中的当前块的右上角块被定义为表示邻近角落块的块。参考图5的以下描述可以类似地应用于其它的邻近角落块。
参考图5,在当前块510的上侧块520、右上块530、左侧块540中,MVC表示当前块510的运动矢量,MVU表示上侧块530的运动矢量,MVUR表示右上块540的运动矢量,并且MVL表示左侧块520的运动矢量。假设当前块510的上侧块530的参考图片索引是1(Ref.#1),当前块510的右上块540的参考图片索引是1(Ref.#1),并且当前块510的左侧块520的参考图片索引是1(Ref.#0)。参考图片索引指的是由每个块的运动矢量表示的参考帧(参考图片)索引。
在图5中,当存储在存储器(缓冲器)中的参考图片列表中的第0个参考帧(参考图片)被用于运动估计的时候,运动矢量MVL用于创建第0个参考帧的运动矢量预测值。当参考图片列表中的第一参考帧用于运动估计的时候,三个运动矢量用于创建第一参考帧的运动矢量预测值。在参考图片列表中的第二至第四参考帧的运动矢量预测值具有与第一参考帧的运动矢量预测值相同的值。
基于创建的运动矢量预测值来计算对于当前块估计的运动矢量MVC和运动矢量预测值之间的差值,并且MVD被发送给解码器。
在图5示出的例子中,当参考图片列表中的第0至第一参考帧(其是与邻近块的参考帧(参考图片)相同的参考帧)被用于运动估计的时候,有可能创建适当的运动矢量预测值。但是,当与邻近块的参考帧(参考图片)不同的参考帧被用于运动估计的时候,创建的运动矢量预测值可能与当前块的运动矢量MVC具有大的差。这是因为:由于没有具有与当前块的运动矢量MVC的参考帧相对应的参考帧的邻近块,很难使用邻近块的信息有效地预测当前块的运动矢量。
在这种情况下,通过对当前块的邻近块的运动矢量使用放大或者缩减,有可能创建更接近于当前块的运动矢量MVC的运动矢量预测值,并且减少编码和发送的MVD的比特量。
例如,当假设上侧块530、右上块540和左侧块520(其是当前块510的邻近块)的参考图片不同于当前块的参考图片的时候,邻近块520、530和540的运动矢量可以通过由表达式1表示的线性内插而被向上缩放(up-scaled)或者向下缩放(down-scaled)。
<表达式1>



在表达式1中,fL表示当前块的左侧块的参考帧号(或者参考图片索引),fU表示当前块的上侧块的参考帧号,fUR表示在角落块当中的当前块的右上块的参考帧号,fME表示经历运动估计的参考帧号,和fC表示当前帧号。
通过由表达式1表示的线性内插,当前块的邻近块的运动矢量被向上缩放或者向下缩放。可以使用邻近块的缩放的运动矢量创建当前块的运动矢量预测值。此时,该编码器或者解码器可以以各种方法创建运动矢量预测值。例如,邻近块的运动矢量中的任何一个可以被选择和用作为运动矢量预测值,邻近块的运动矢量的平均值可以用作为运动矢量预测值,或者通过对邻近块的运动矢量进行中值滤波而获得的值可以用作为运动矢量预测值。
图6是按照本发明的一个实施例示意地举例说明缩放方法的流程图。
参考图6,该编码器或者解码器使用第n个参考帧执行运动估计(S610)。第n个参考帧是在参考图片列表中的第n个参考图片(参考帧),并且可以是当前块的参考帧(参考图片)。
该编码器或者解码器可以确定邻近块的参考帧号(在参考图片的情况下,参考图片索引)是否不同于n(S620)。例如,当当前块的左侧块、当前块的上侧块和角落块当中的当前块的右上角块被认为是邻近块的时候,该编码器或者解码器确定左侧块的参考帧号fL、上侧块的参考帧号fU,和右上角块的参考帧号fUR的值是否不同于n。
当邻近块的参考帧号不同于n的时候,该编码器或者解码器可以缩放邻近块的运动矢量(S630)。例如,当当前块的左侧、上侧和右上块被认为是如上所述的邻近块,并且fL、fU和fUR的值不同于n的时候,该编码器或者解码器可以缩放相应块的运动矢量,也就是说,当前块的左侧块的运动矢量MVL、当前块的上侧块的运动矢量MVU,和当前块的右上块的运动矢量MVUR。
该编码器或者解码器可以创建当前块的运动矢量预测值(S640)。当邻近块中的任何一个具有与当前块的参考帧相同的参考帧号的时候,该编码器或者解码器可以使用相应块的运动矢量创建当前块的运动矢量预测值。例如,当fL、fU和fUR的值中的至少一个等于n的时候,有可能使用具有参考帧号n的邻近块的运动矢量来创建当前块的运动矢量预测值。当fL、fU和fUR的值不同于n的时候,该编码器或者解码器可以如上所述缩放邻近块的运动矢量,以创建当前块的运动矢量预测值。表达式1可以用作缩放方法。
该编码器或者解码器可以计算邻近块的缩放的运动矢量或者非缩放的运动矢量的中间值,以创建当前块的运动矢量预测值。做为选择,该编码器或者解码器可以计算邻近块的缩放的运动矢量或者非缩放的运动矢量的平均值,以创建当前块的运动矢量预测值。做为选择,该编码器或者解码器可以将邻近块的缩放的运动矢量或者非缩放的运动矢量中的任何一个用作为当前块的运动矢量预测值。
为了解释便利的目的,表示位于当前块的左侧的邻近块的左侧块520、表示位于当前块的上侧的邻近块的上侧块530,和表示位于当前块的邻近角落的块的右上块540被作为当前块的邻近块举例说明,但是,可以考虑到所有邻近块或者邻近块当中的位于其他位置的块来应用以上提及的方法。
例如,如图4所示,运动矢量预测值可以使用三个角落块410、430和450,左侧块420中的任何一个,和上侧块440中的任何一个来创建。在这种情况下,左侧块420当中的位于特定位置的块420-1可以被使用,或者上侧块440当中的位于特定位置的块440-1可以被使用。
通过确定在左侧候选组A0和A1上,以及在上侧候选组B0、B1和B2上是否存在具有与当前块的参考帧(参考图片)相同的参考帧的块,可以逐个地选择候选。当在左侧候选组的块中没有具有与当前块的参考帧(参考图片)相同的参考帧(参考图片)的块的时候,左侧候选块或者从左侧候选块中选择出来的块的运动矢量可以被缩放。当在上侧候选组的块中没有具有与当前块的参考帧(参考图上)相同的参考帧(参考图片)的块的时候,上侧候选块或者从上侧候选块中选择出来的块的运动矢量可以被缩放。
图7是按照本发明的一个实施例示意地举例说明缩放当前图片(当前帧)中的当前块的邻近块的运动矢量的方法的示意图。
参考图7,当前图片700中的当前块740的邻近块730的参考图片可以或者可以不与当前块740的参考图片相同。
当当前块740的参考图片和邻近块730的参考图片彼此相同,作为参考图片710的时候,邻近块730的运动矢量750可用于创建当前块的运动矢量预测值,而无需缩放。此时,邻近块730可以具有与当前块740的相同的参考图片列表,或者可以具有与其不同的参考图片列表。例如,当当前块740的参考图片是在参考图片列表L0中的第N个参考图片,并且邻近块730具有与当前块740的相同的参考图片以及与其相同的参考图片列表的时候,该邻近块730的运动矢量750可以由mvL0N表示。
另一方面,当当前块740的参考图片(其是参考图片710)和邻近块730的参考图片(其是参考图片720)彼此不同的时候,该邻近块730的运动矢量760可以被缩放,并且缩放的运动矢量可用于创建当前块的运动矢量预测值。此时,该邻近块730可以具有与当前块740的相同的参考图片列表,或者可以具有与当前块740的不同的参考图片列表。例如,当当前块740的参考图片是在参考图片列表L0中的第N个参考图片,并且邻近块730具有与当前块740的不同的参考图片以及与其相同的参考图片列表的时候,该邻近块730的运动矢量750可以由mvL0N_scaled表示。
可以考虑到在当前块的参考图片和当前块之间的距离tb的幅值,以及在邻近块的参考图片和当前图片之间的距离td的幅值,来缩放邻近块的运动矢量。由表达式2表示的方法可以用作为缩放邻近块的运动矢量的方法的例子。
<表达式2>
mvLON_scaled=(DistScaleFactor*mvLON+128)>>8
在这里,DistScaleFactor表示考虑到如上所述的两个距离tb和td的幅值所确定的缩放因子。此时,在上舍入(rounding-up)的情况下,可以如在表达式2中使用常数128,并且常数127,而不是常数128,可以在下舍入(rounding-down)的情况下使用。例如,当以四分之一象元单元(1/4像素块)的缩放结果是1.5的时候,可以使用常数128获得2的舍入结果,并且可以使用常数127获得1的舍入结果。在这里,在下舍入的情况下,可以应用指向0的下舍入。例如,当下舍入被应用于-1.5的值的时候,下舍入可以被应用为-1,而不是-2的值。
可以以各种方式确定DistScaleFactor,并且表达式3和4是确定DistScaleFactor的方法的例子。
<表达式3>
DistScaleFactor=Clip3(-1024,1023,(tb*tx+32)>>6)
<表达式4>
DistScaleFactor=Clip3(-4096,4095,(tb*tx+32)>>6)
在这里,如在H.264/MPEG-4AVC(参见H.264标准的8.4.1.2.3)的时间运动矢量候选的推导中的,表达式3和4中的tx可以被设置为tx=(16384+(Abs(td)/2))/td。
另一方面,用于创建运动矢量预测值的邻近块可以经由运动矢量竞争来选择。该运动矢量竞争指的是在多个运动矢量候选当中选择最适当的运动矢量,并且其被用作预测值。在这种情况下,Col块(其是时间邻近块)以及当前块的空间邻近块也可以被考虑。
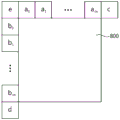
图8是按照本发明的一个实施例示意地举例说明执行运动矢量竞争的方法的示意图。图8示出在当前块800的邻近块当中的空间邻近块。
参考图8,在图8中示出的空间邻近块包括na个(这里na是等于或者大于1的整数)位于当前块800的上侧的上侧组块a0、a1、…,和ana,nb个(这里nb是等于或者大于1的整数)位于当前块800的左侧的左侧组块b0、b1、…,和bnb,和位于当前块800的右上角、左下角和左上角的角落组块c、d和e。
在图8示出的例子中,AMVP(高级运动矢量预测)中的运动矢量候选可以如表达式5表示的来计算。
<表达式5>
运动矢量候选={median(a’,b’,c’),a’,b’,c’,时间预测值}
在表达式5中,三个空间运动矢量a’、b’和c’指的是在组中具有与当前块800的相同的参考图片列表以及与当前块的相同的参考图片索引的第一可用块(位于当前块的上侧的块、位于当前块的左侧的块,和位于当前块的角落的块)的运动矢量。该编码器或者解码器可以使用由表达式5表示的运动矢量候选的全部或者一部分,创建参考图3描述的运动矢量预测值候选列表。
该编码器或者解码器可以将由表达式5表示的运动矢量候选中的预先确定的候选选择作为当前块的运动矢量预测值。此时,该编码器或者解码器可以考虑到由表达式5表示的运动矢量的全部或者一部分,选择当前块的MVP。例如,该编码器可以从由表达式5表示的运动矢量候选当中的、当前块的运动矢量选择具有最小残留值的候选,作为当前块的MVP,并且可以发送有关其的信息到解码器。该编码器可以仅仅考虑由表达式5表示的运动矢量当中的一些运动矢量,例如,a’、b’和c’,来选择可用的运动矢量,并且当a’、b’和c’没有被考虑(不可用的)的时候,可以另外地考虑时间预测值。
在表达式5中,median(a’、b’、c’)表示a’、b’和c’的中间矢量,并且以下的方法1)至4)可以用作中间矢量的例子。
1)当a’、b’和c’全部是可用的时候,计算a’、b’和c’的值,以计算中间矢量。
2)当a’、b’和c’中的仅仅两个是可用的时候,不可用的运动矢量的值被设置为0,以计算中间矢量。
3)当a’、b’和c’中的仅仅一个是可用的时候,可用的运动矢量被用作中间矢量。
4)当不满足1)至3)的时候,中间矢量的值被设置为0。
此时,运动矢量a’、b’和c’中的不可用运动矢量不被包括在运动矢量候选中。时间运动矢量预测值指的是在除当前图片(帧)以外的图片(帧)中与当前块的共址运动矢量。
另一方面,在表1中示出用于计算位于当前块800的上侧的na个(这里na是等于或者大于1的整数)块当中的第一可用块的运动矢量的伪代码(pseudo code)的例子,第一可用块具有与当前块800相同的参考图片列表,和与其相同的参考图片索引。
<表1>

在表1中,以从a0到ana的搜索顺序执行搜索,但是,本发明不局限于这个顺序,可以通过以从ana到a0的搜索顺序执行搜索来推导出具有与当前块800相同的参考图片列表以及与其相同的参考图片索引的第一可用块的运动矢量。
另一方面,与在表1中示出的例子不同,不考虑参考图片列表和参考图片索引,在上侧组块当中的被最先搜索的中间模式块的运动矢量可以被缩放,并且缩放的运动矢量可以被分配作为a’的值。在这种情况下,用于推导运动矢量a’的伪代码的例子在表2中示出。
<表2>

在表2中,以从a0到ana的搜索顺序执行搜索,但是,本发明不局限于这个顺序,并且可以通过以从ana到a0的搜索顺序执行搜索,并且缩放具有与当前块800相同的参考图片列表以及与其相同的参考图片索引的第一可用块的运动矢量,来推导出运动矢量。
在nb个(这里nb是等于或者大于1的整数)左侧组块b0、b1、…和bnb当中的、具有与当前块800相同的参考图片列表以及与其相同的参考图片索引的第一可用块的运动矢量b’可以类似于表1而获得。在这种情况下,用于推导运动矢量b’的伪代码的例子在表3中示出。
<表3>

在表3中,以从b0到bnb的搜索顺序执行搜索,但是,本发明不局限于这个顺序,可以通过以从bnb到b0的搜索顺序执行搜索来推导出具有与当前块800相同的参考图片列表以及与其相同的参考图片索引的第一可用块的运动矢量。
另一方面,与在表3中示出的例子不同,不考虑参考图片列表和参考图片索引,在左侧组块当中的被最先搜索的中间模式块的运动矢量可以被缩放,并且缩放的运动矢量可以被分配作为b’的值。在这种情况下,用于获得运动矢量b’的伪代码的例子在表4中示出。
<表4>

在表4中,以从b0到bnb的搜索顺序执行搜索,但是,本发明不局限于这个顺序,可以通过以从bnb到b0的搜索顺序执行搜索,并且缩放具有与当前块800相同的参考图片列表以及与其相同的参考图片索引的第一可用块的运动矢量,来获得运动矢量。
在三个角落组块c、d和e当中的、具有与当前块800相同的参考图片列表以及与其相同的参考图片索引的第一可用块的运动矢量c’可以类似于表1而获得。用于推导运动矢量b’的伪代码的例子在表5中示出。在表5中,为了解释便利的目的,描述了c0=c,c1=d,和c2=e。
<表5>

在表5中,以从c0到c2的搜索顺序执行搜索,但是,本发明不局限于这个顺序,可以通过以从c2到c0的搜索顺序,或者c1→c2→c0或者c1→c0→c2的搜索顺序执行搜索,来获得具有与当前块800相同的参考图片列表以及与其相同的参考图片索引的第一可用块的运动矢量。
另一方面,与在表5中示出的例子不同,不考虑参考图片列表和参考图片索引,角落组块当中的被最先搜索的中间模式块的运动矢量可以被缩放,并且缩放的运动矢量可以被分配作为c’的值。在这种情况下,用于推导运动矢量c’的伪代码的例子在表6中示出。
<表6>

在表6中,以从c0到c2的搜索顺序执行搜索,但是,本发明不局限于这个顺序,并且可以通过以从c2到c0的搜索顺序,或者c1→c2→c0或者c1→c0→c2的搜索顺序执行搜索,并且缩放具有与当前块800相同的参考图片列表以及与其相同的参考图片索引的第一可用块的运动矢量,来推导出运动矢量。
另一方面,只有当运动矢量是不可用时,不考虑参考图片列表和参考图片索引,在相应的邻近组中被最先搜索的中间模式块的运动矢量可以被缩放,并且缩放的运动矢量可以被分配作为运动矢量候选。
在表1至6中,具有与当前块相同的参考图片以及与其相同的参考图片列表的块被设置为可用块。在表2、4和6中,甚至当块的参考图片和参考图片列表与当前块的不同时,在该块处于中间预测模式中的情况下,相应的块的运动矢量可以通过缩放而被使用。
在表7至12中,当块的参考图片和参考图片列表与当前块的不同的时候,所描述的是在该块处于中间预测模式中的情况下,相应的块的运动矢量通过缩放而被使用。
表7示出当上侧组块的运动矢量是不可用的时候,通过缩放上侧组块当中的被最先搜索的中间模式块的运动矢量来计算运动矢量a’的伪代码的例子。
<表7>

在表7中,以从a0到ana的搜索顺序执行搜索,但是,本发明不局限于这个顺序,并且可以通过以从ana到a0的搜索顺序执行搜索,并且缩放第一可用块的运动矢量获得运动矢量。
表8示出当左侧组块的运动矢量是不可用的时候,通过缩放左侧组块当中的被最先搜索的中间模式块的运动矢量来推导运动矢量b’的伪代码的例子。
<表8>

在表8中,以从b0到bnb的搜索顺序执行搜索,但是,本发明不局限于这个顺序,并且可以通过以从bnb到b0的搜索顺序执行搜索,并且缩放第一可用块的运动矢量来推导出运动矢量。
表9示出当左侧组块的运动矢量是不可用的时候,通过缩放左侧组块当中的被最先搜索的中间模式块的运动矢量来获得运动矢量c’的伪代码的例子。
<表9>

在表9中,以从c0到c2的搜索顺序执行搜索,但是,本发明不局限于这个顺序,并且可以通过以c1→c2→c0或者c1→c0→c2的搜索顺序执行搜索,并且缩放第一可用块的运动矢量来获得运动矢量。
另一方面,虽然类似于以上提及的方法,但当当前块的邻近块的运动矢量是不可用的时候,可以以下面的优先级确定要缩放的运动矢量。
<优先级>
(1)参考与当前块的相同的参考图片的块(当列表0(L0)和列表1(L1)具有相同的参考图片的时候,其可能出现)。
(2)如果在检查以上(1)的时候,在邻近块的运动矢量中没有可用的运动矢量,则是具有相同的参考图片列表的块。
(3)如果在检查以上(2)的时候,在邻近块的运动矢量中没有可用的运动矢量,则是其它的中间模式块。
因此,该编码器或者解码器可以以1)至3)的优先级确定当前块的邻近块中的任何一个,并且可以缩放相应的块的运动矢量。
表10示出通过选择上侧组块中的任何块,并且缩放相应的块的运动矢量来获得运动矢量a’的伪代码的例子。
<表10>


在表10中,以从a0到ana的搜索顺序执行搜索,但是,本发明不局限于这个顺序,并且可以通过以从ana到a0的搜索顺序执行搜索,并且缩放第一可用块的运动矢量来推导出运动矢量。
表11示出通过基于以上提及的优先级选择左侧组块中的任何块,并且缩放相应块的运动矢量来获得运动矢量b’的伪代码的例子。
<表11>


在表11中,以从b0到bnb的搜索顺序执行搜索,但是,本发明不局限于这个顺序,并且可以通过以从bnb到b0的搜索顺序执行搜索,并且缩放第一可用块的运动矢量来获得运动矢量。
表12示出通过基于以上提及的优先级选择左侧组块中的任何块,并且缩放相应块的运动矢量来推导运动矢量c’的伪代码的例子。
<表12>


在表12中,以从c0到c2的搜索顺序执行搜索,但是,本发明不局限于这个顺序,并且可以通过以c1→c2→c0或者c1→c0→c2的搜索顺序执行搜索,并且缩放第一可用块的运动矢量来获得运动矢量。
在表10至12中,所描述的是基于以上提及的优先级选择缩放目标,并且推导出可用的运动矢量候选,但是,优先级不局限于以上提及的,并且必要时,可以以各种形式改变和应用。
另一方面,以上提及的优先级可以由以下的检查条件(reviewcondition)表示。
<检查条件>
要扫描的块的运动信息(参考图片和参考图片列表)是:
(1)与当前块的相同的参考图片和与其相同的参考图片列表;
(2)与当前块的相同的参考图片和与其不同的参考图片列表;
(3)与当前块的不同的参考图片和与其相同的参考图片列表;
(4)与当前块的不同的参考图片和参考图片列表。
对于该检查条件,该编码器或者解码器可以以预先确定的顺序扫描预先确定数目,例如,n个块,以便确定用于运动矢量预测的空间运动矢量候选。此时,该编码器或者解码器可以在顺序地扫描当前块的n个邻近块时确定块是否是对应于检查条件的块,或者可以确定是否是在扫描当前块的邻近块,例如上侧组、左侧组和角落组时,在扫描的组中对应于检查条件的块。代替于将邻近块划分为上侧组、左侧组,和角落组,当前块的邻近块可以划分为包括左上角块和右上角块的上侧组,和包括左下角块的左侧块,并且可以在按组扫描两个组时确定在要扫描的组中是否存在满足检查条件的块。
对于该检查条件,该编码器或者解码器可以将较高优先级赋予具有较低编号的检查条件。这是因为满足具有较低编号的检查条件的邻近块可以被认为是具有更加类似于当前块的运动信息。
在下文中,将参考多个表来描述没有任何变化地或者通过缩放将块(当基于检查条件的优先级顺序地扫描当前块的n个邻近块时,其被最先检查为可用的)的运动矢量用作为用于预测当前块的运动矢量的运动矢量预测值候选的方法。
在这里,可用块指的是可以用于当前块的中间预测的块。
如上所述,可以考虑到在当前块的参考图片和当前图片之间的时间距离,和在邻近块的参考图片和当前图片之间的时间距离来执行缩放。
在以下的表中描述的数字1至12表示扫描(检查)顺序。为了解释便利的目的,块0、块1和块2被认为是当前块的邻近块。块0至2表示用于计算空间运动矢量候选的候选块的位置。块0至2的位置位于围绕当前块的左侧、上侧和角落中的任何一个。为了解释便利的目的,可以假设块0至2以扫描顺序顺序地定位。
表13示出通过缩放将块(当基于检查条件的优先级顺序地扫描围绕当前块的块0至2时,其被最先检查为可用的)的运动矢量用作为当前块的空间运动矢量预测值候选的方法的例子。
<表13>
| 块0 | 块1 | 块2 | |
| 检查条件1 | 1 | 2 | 3 |
| 检查条件2 | 4 | 5 | 6 |
| 检查条件3 | 7 | 8 | 9 |
| 检查条件4 | 10 | 11 | 12 |
在表13示出的例子中,检查块0是否具有满足检查条件1的运动信息,当块0具有满足检查条件1的运动信息的时候,块0的运动矢量(mv)用作为当前块的空间运动矢量预测值候选,当块0不具有满足检查条件1的运动信息的时候,块1被搜索,并且检查块1是否具有满足检查条件1的运动信息。以这种方法,确定当前块的空间运动矢量预测值候选。
表14示出通过缩放将块(当基于检查条件的优先级顺序地扫描围绕当前块的块0至2时,其被最先检查为可用的)的运动矢量用作为当前块的空间运动矢量预测值候选的方法的另一个例子。
<表14>
| 块0 | 块1 | 块2 | |
| 检查条件1 | 1 | 5 | 9 |
| 检查条件2 | 2 | 6 | 10 |
| 检查条件3 | 3 | 7 | 11 |
| 检查条件4 | 4 | 8 | 12 |
在表14示出的例子中,检查块0是否具有满足检查条件1的运动信息,当块0具有满足检查条件1的运动信息的时候,块0的运动矢量(mv)用作为当前块的空间运动矢量预测值候选,并且扫描(检查)块0是否具有满足检查条件2的运动信息。当块0不具有满足检查条件1至4的运动信息的时候,在对于检查条件1至4扫描块1时检查块1是否具有满足检查条件1至4的运动信息。以这种方法,确定当前块的空间运动矢量预测值候选。
表15示出通过缩放将块(当基于检查条件的优先级顺序地扫描围绕当前块的块0至2时,其被最先检查为可用的)的运动矢量用作为当前块的空间运动矢量预测值候选的方法的另一个例子。
<表15>
| 块0 | 块1 | 块2 | |
| 检查条件1 | 1 | 2 | 3 |
| 检查条件2 | 4 | 7 | 10 |
| 检查条件3 | 5 | 8 | 11 |
| 检查条件4 | 6 | 9 | 12 |
在表15示出的例子中,检查是否块0是否具有满足检查条件1的运动信息,当块0具有满足检查条件1的运动信息的时候,块0的运动矢量(mv)用作为当前块的空间运动矢量预测值候选。当块0不具有满足检查条件1的运动信息的时候,其顺序地检查是否块1和2是否具有满足检查条件1的运动信息。当块0至2不具有满足检查条件1的运动信息的时候,当对于检查条件2至4扫描块1时其顺序地检查是否块0是否具有满足相应的检查条件的运动信息,同时扫描用于检查条件2至4的1。当块0不具有满足检查条件2至4的运动信息的时候,检查条件2至4被对于块1顺序地检查检查条件2至4。以这种方法,确定当前块的空间运动矢量预测值候选。
表16示出通过缩放将块(当基于检查条件的优先级顺序地扫描围绕当前块的块0至2时,其被最先检查为可用的)的运动矢量用作为当前块的空间运动矢量预测值候选的方法的另一个例子。
<表16>
| 块0 | 块1 | 块2 | |
| 检查条件1 | 1 | 5 | 6 |
| 检查条件2 | 2 | 7 | 8 |
| 检查条件3 | 3 | 9 | 10 |
| 检查条件4 | 4 | 11 | 12 |
在表16示出的例子中,顺序地检查块0是否具有满足检查条件1至4的运动信息。例如,当块0具有满足检查条件1的运动信息的时候,该运动矢量用作为当前块的空间运动矢量预测值候选。当没有满足检查条件1的运动信息的时候,检查是否存在满足检查条件2的运动信息。当块0不具有满足检查条件1至4的运动信息的时候,在对于检查条件1扫描块1时顺序地检查块1和块2是否具有满足相应检查条件的运动信息。当块0至2不具有满足检查条件1的运动信息的时候,顺序地检查块1和2是否具有满足检查条件2的运动信息。以这种方法,确定当前块的空间运动矢量预测值候选。
在表13中示出的例子示出具有优先级的扫描顺序,该优先级被赋予给检查条件,而不是块的位置。相反地,表14示出具有优先级的扫描顺序的例子,该优先级被赋予给块的位置,而不是检查条件。
表15和表16示出扫描顺序的例子,其中检查条件的优先级和块位置的优先级被适当地混合。如上所述,表15示出当最高优先级被赋予给检查条件1,但是没有满足检查条件1的块的时候,考虑块的位置的扫描顺序的例子。表16示出在块0中回顾检查条件的可用性之后,当没有可用的运动信息的时候,顺序地考虑条件的扫描顺序的例子。
通过以上提及的方法缩放的运动矢量(例如,a’、b’和c’)可以对a’、b’和c’的中间矢量的值有影响。此外,该运动矢量可以对在确定候选运动矢量的时候要考虑的运动矢量的数目有影响。例如,划分为可用运动矢量的邻近块的运动矢量可以通过缩放被重新地创建。
甚至当没有直接应用AMVP技术时,可以使用以上提及的方法。例如,可以经由计算运动矢量a’、b’和c’和从a’、b’和c’计算中值的过程来预测当前块的运动矢量。
此时,计算a’、b’和c’的过程可以采用与在AMVP中计算a’、b’和c’相同的方法。
另一方面,AMVP方法可以如图9所示修改和应用。
图9是按照本发明的一个实施例示意地举例说明应用AMVP的另一个方法的示意图。参考图9,在图8中示出的当前块的邻近块的一部分可以用作为运动矢量候选。例如,在图9示出的例子中,在位于当前块900的最左下侧的m个左侧块A0、A1、…和Am当中的位于当前块的最左下侧的块,位于当前块900的左下角的块Am+1,位于当前块的左上角的块B-1,在位于当前块900的上侧的n个上侧块当中的位于当前块的最右上侧的块Bn,和位于当前块900的右上角的块Bn+1可以用作为AMVP候选块。
在这种情况下,类似于在图4中示出的的例子(其中使用角落块、左下块420-1,和右上块440-1),当前块的邻近块Am、Am+1、B-1、Bn和Bn+1被使用。在图9示出的例子中,以Am+1→Am的顺序910扫描(或者检查)左侧块Am和Am+1,并且以Bn+1→Bn→B-1的顺序920扫描(或者检查)上侧块B-1、Bn和Bn+1。
此时,由表达式6表示的运动矢量(运动矢量预测值:MVP)可以被认为是当前块的运动矢量候选。
<表达式6>
运动矢量候选={a’,b’,时间预测值}
表达式6示出在图9示出的例子中可以用作为当前块的运动矢量预测值的运动矢量的候选。该编码器或者解码器可以使用表达式6的运动矢量候选的全部或者一部分来创建参考图3描述的运动矢量预测值候选列表。
参考表达式6,在图9示出的例子中,在当前块的空间邻近块当中的两个块的运动矢量被考虑以预测当前块的运动矢量。该编码器或者解码器可以考虑由表达式6表示的当前块的两个空间邻近块的运动矢量和当前块的时间邻近块的运动矢量(时间预测值)。
在表达式6中,a’是当以Am+1→Am的顺序910扫描(检查)当前块的左侧块Am和Am+1的时候被最先搜索为是可用的块的运动矢量,并且是当前块的运动矢量预测值候选。
在表达式6中,b’是当以Bn+1→Bn→B-1的顺序920扫描(检查)当前块的上侧块B-1、Bn和Bn+1的时候被最先搜索为是可用的块的运动矢量,并且是当前块的运动矢量预测值候选。b’可以被说成是上侧mv预测值。
当被选择为是可用的邻近块的参考图片索引与当前块的参考图片索引相同的时候,也就是说,当选择的邻近块的参考图片与当前块的参考图片相同的时候,相应的块的运动矢量可以用作为当前块的运动矢量预测值,而无需缩放运动矢量。这种情形对应于检查条件1或者检查条件2。
当被选择为是可用的邻近块的参考图片索引与当前块的参考图片索引不同的时候,也就是说,当选择的邻近块的参考图片与当前块的参考图片不同的时候,通过缩放运动矢量,相应的块的运动矢量可以用作为当前块的运动矢量预测值。这种情形对应于检查条件3或者检查条件4。
在图9中,考虑到四个步骤检查条件和邻近块的位置,可以以各种顺序扫描当前块的邻近块的运动矢量。此时,该编码器或者解码器可以独立地确定从左侧块Am和Am+1计算的运动矢量预测值候选,例如,左侧运动矢量预测值,以及从上侧块B-1、Bn和Bn+1计算的运动矢量预测值候选,例如,上侧运动矢量预测值。
类似于在图8中示出的例子,在图9中,在以以下的表中示出的顺序执行扫描时检查是否满足检查条件,当满足检查条件的时候,该扫描停止,并且无需任何变化或者通过缩放,满足检查条件的块的运动矢量用作为用于预测当前块的运动矢量的运动矢量预测值(MVP)候选。
该编码器或者解码器可以基于选择的运动矢量预测值候选构建运动矢量预测值(MVP)列表。该编码器可以通过利用运动矢量预测值索引等等表示在MVP列表中要用于预测当前块的运动矢量预测值。该解码器可以使用由从编码器接收的运动矢量预测值索引所表示的运动矢量预测值列表中的运动矢量预测值来推导出当前块的运动矢量。
在下文中,将顺序地描述选择左侧运动矢量预测值的方法,和选择上侧运动矢量预测值的方法。在以下的表中数字1至8表示扫描顺序。
表17示出没有任何变化或者通过缩放,将块(在以检查条件的优先级顺序顺序地扫描在图9中的当前块900的左侧邻近块Am和Am+1时,其被最先检查为可用的)的运动矢量用作为当前块的空间运动矢量预测值候选的方法的例子。
<表17>
| 块A<sub>m</sub> | 块A<sub>m+1</sub> | |
| 检查条件1 | 1 | 5 |
| 检查条件2 | 2 | 6 |
| 检查条件3 | 3 | 7 |
| 检查条件4 | 4 | 8 |
在表17示出的例子中,检查块Am是否满足该检查条件中的一个。当块Am不满足检查条件1的时候,检查块Am是否满足检查条件2。以这种方法执行扫描,并且当块Am不满足检查条件1至4的时候,以扫描顺序顺序地检查块Am+1是否满足检查条件1至4中的一个。
当在扫描的过程中相应的块满足检查条件的时候,该编码器或者解码器停止扫描,并且将相应的块的运动矢量选择作为当前块的运动矢量预测值候选。必要时,该编码器或者解码器可以缩放邻近块的运动矢量,并且可以将缩放的运动矢量用作为运动矢量预测值候选。例如,当邻近块的参考图片与当前块的参考图片不同的时候,该编码器或者解码器可以缩放相应的邻近块的运动矢量,并且可以将缩放的运动矢量用作为运动矢量预测值候选。此时,由表达式1或者表达式2表示的方法可以用作为缩放方法。
表18示出没有任何变化或者通过缩放,将块(在以检查条件的优先级顺序顺序地扫描在图9中的当前块900的左侧邻近块Am和Am+1时,其被最先检查为可用的)的运动矢量用作为当前块的空间运动矢量预测值候选的方法的另一个例子。
<表18>
| 块A<sub>m</sub> | 块A<sub>m+1</sub> | |
| 检查条件1 | 1 | 2 |
| 检查条件2 | 3 | 6 |
| 检查条件3 | 4 | 7 |
| 检查条件4 | 5 | 8 |
在表18示出的例子中,检查块Am是否满足检查条件1。当块Am不满足检查条件1的时候,检查块Am+1是否满足检查条件1。当块Am+1不满足检查条件1的时候,顺序地检查块Am是否满足检查条件2至4中的一个。当块Am不满足检查条件2至4的时候,以扫描顺序顺序地检查块Am+1是否满足检查条件2至4中的一个。
当在扫描的过程中相应的块满足检查条件的时候,该编码器或者解码器停止扫描,并且将相应的块的运动矢量选择作为当前块的运动矢量预测值候选。该编码器或者解码器可以缩放邻近块的运动矢量,并且必要时,可以将缩放的运动矢量用作为运动矢量预测值候选。例如,当邻近块的参考图片与当前块的参考图片不同的时候,该编码器或者解码器可以缩放相应的邻近块的运动矢量,并且可以将缩放的运动矢量用作为运动矢量预测值候选。此时,由表达式1或者表达式2表示的方法可以用作为缩放方法。
表19示出没有任何变化或者通过缩放,将块(在以检查条件的优先级顺序顺序地扫描在图9中的当前块900的左侧邻近块Am和Am+1时,其被最先检查为可用的)的运动矢量用作为当前块的空间运动矢量预测值候选的方法的另一个例子。
<表19>
| 块A<sub>m</sub> | 块A<sub>m+1</sub> | |
| 检查条件1 | 5 | 1 |
| 检查条件2 | 6 | 2 |
| 检查条件3 | 7 | 3 |
| 检查条件4 | 8 | 4 |
在表19示出的例子中,与在表17中示出的扫描顺序不同,顺序地检查块Am+1是否满足检查条件1至4。当块Am+1不满足检查条件1至4的时候,顺序地检查块Am是否满足检查条件1至4。
当在扫描的过程中搜索到满足检查条件的块的时候,该编码器或者解码器停止扫描,并且将相应的块的运动矢量选择作为当前块的运动矢量预测值候选。该编码器或者解码器可以缩放邻近块的运动矢量,并且必要时,可以将缩放的运动矢量用作为运动矢量预测值候选。例如,当邻近块的参考图片与当前块的参考图片不同的时候,该编码器或者解码器可以缩放相应的邻近块的运动矢量,并且可以将缩放的运动矢量用作为运动矢量预测值候选。此时,由表达式1或者表达式2表示的方法可以用作为缩放方法。
表20示出没有任何变化或者通过缩放,将块(在以检查条件的优先级顺序顺序地扫描在图9中的当前块900的左侧邻近块Am和Am+1时,其被最先检查为可用的)的运动矢量用作为当前块的空间运动矢量预测值候选的方法的另一个例子。
<表20>
| 块A<sub>m</sub> | 块A<sub>m+1</sub> | |
| 检查条件1 | 2 | 1 |
| 检查条件2 | 6 | 3 |
| 检查条件3 | 7 | 4 |
| 检查条件4 | 8 | 5 |
在表20示出的例子中,与表18的例子不同,以赋予给块Am+1的优先级来应用在表18的例子中应用的扫描顺序。例如,在表20的例子中检查块Am+1是否满足检查条件1。当块Am+1不满足检查条件1的时候,以扫描顺序检查块Am是否满足检查条件1。当块Am不满足检查条件1的时候,以扫描顺序顺序地检查块Am+1是否满足检查条件2至4中的一个。当块Am+1不满足检查条件2至4的时候,以扫描顺序顺序地检查块Am是否满足检查条件2至4中的一个。
当在扫描的过程中搜索到满足检查条件的块的时候,该编码器或者解码器停止扫描,并且将相应的块的运动矢量选择作为当前块的运动矢量预测值候选。该编码器或者解码器可以缩放邻近块的运动矢量,并且必要时,可以将缩放的运动矢量用作为运动矢量预测值候选。例如,当邻近块的参考图片与当前块的参考图片不同的时候,该编码器或者解码器可以缩放相应的邻近块的运动矢量,并且可以将缩放的运动矢量用作为运动矢量预测值候选。此时,由表达式1或者表达式2表示的方法可以用作为缩放方法。
表21示出没有任何变化或者通过缩放,将块(在以检查条件的优先级顺序顺序地扫描在图9中的当前块900的左侧邻近块Am和Am+1时,其被最先检查为可用的)的运动矢量用作为当前块的空间运动矢量预测值候选的方法的另一个例子。
<表21>
| 块A<sub>m</sub> | 块A<sub>m+1</sub> | |
| 检查条件1 | 2 | 1 |
| 检查条件2 | 4 | 3 |
| 检查条件3 | 7 | 5 |
| 检查条件4 | 8 | 6 |
在表21示出的例子中,首先检查块Am+1是否满足检查条件1。当块Am+1不满足检查条件1的时候,以扫描顺序检查块Am是否满足检查条件1。当块Am不满足检查条件1的时候,以扫描顺序检查块Am+1是否满足检查条件2。当块Am+1不满足检查条件2的时候,以扫描顺序检查块Am是否满足检查条件2。当块Am不满足检查条件2的时候,顺序地检查块Am+1是否满足检查条件3和4中的一个,并且块Am是否满足检查条件3和4中的一个。
当在扫描的过程中搜索到满足检查条件的块的时候,该编码器或者解码器停止扫描,并且将相应的块的运动矢量选择作为当前块的运动矢量预测值候选。该编码器或者解码器可以缩放邻近块的运动矢量,并且必要时,可以将缩放的运动矢量用作为运动矢量预测值候选。例如,当邻近块的参考图片与当前块的参考图片不同的时候,该编码器或者解码器可以缩放相应的邻近块的运动矢量,并且可以将缩放的运动矢量用作为运动矢量预测值候选。此时,由表达式1或者表达式2表示的方法可以用作为缩放方法。
表22示出没有任何变化或者通过缩放,将块(在以检查条件的优先级顺序顺序地扫描在图9中的当前块900的左侧邻近块Am和Am+1时,其被最先检查为可用的)的运动矢量用作为当前块的空间运动矢量预测值候选的方法的另一个例子。
<表22>
| 块A<sub>m</sub> | 块A<sub>m+1</sub> | |
| 检查条件1 | 3 | 1 |
| 检查条件2 | 4 | 2 |
| 检查条件3 | 7 | 5 |
| 检查条件4 | 8 | 6 |
在表22中,顺序地检查每个块是否满足两个检查条件。具体地,该编码器或者解码器首先检查块Am+1是否满足检查条件1。当块Am+1不满足检查条件1的时候,该编码器或者解码器检查块Am+1是否满足检查条件2。当块Am+1不满足检查条件2的时候,该编码器或者解码器检查块Am是否满足检查条件1。当块Am不满足检查条件1的时候,该编码器或者解码器检查块Am是否满足检查条件2。当块Am不满足检查条件2的时候,该编码器或者解码器检查块Am+1是否满足检查条件3。当块Am+1不满足检查条件3的时候,该编码器或者解码器检查块Am+1是否满足检查条件4。当块Am+1不满足检查条件4的时候,该编码器或者解码器检查块Am是否满足检查条件3。当块Am不满足检查条件3的时候,该编码器或者解码器检查块Am是否满足检查条件4。
当在扫描的过程中搜索到满足检查条件的块的时候,该编码器或者解码器停止扫描,并且将相应的块的运动矢量选择作为当前块的运动矢量预测值候选。该编码器或者解码器可以缩放邻近块的运动矢量,并且必要时,可以将缩放的运动矢量用作为运动矢量预测值候选。例如,当邻近块的参考图片与当前块的参考图片不同的时候,该编码器或者解码器可以缩放相应的邻近块的运动矢量,并且可以将缩放的运动矢量用作为运动矢量预测值候选。此时,由表达式1或者表达式2表示的方法可以用作为缩放方法。
如表17至22的例子,可以应用各种扫描顺序,以从当前块的左侧邻近块Am和Am+1计算当前块的运动矢量预测值候选,也就是说,左侧运动矢量候选(左侧mv候选)。
此时,某些扫描可以被省略或者去除,以减少执行扫描的情形的数目,以及在复杂度方面获得好处。例如,在表17的例子中,仅仅以1至5的顺序执行扫描,并且对应于6至8的顺序的扫描可以被省略。类似地,在表18至22的例子中,具有较后优先级的扫描(例如,诸如5至8的顺序、6至8的顺序,和7至8或者8的顺序)可以被省略,以减少过程的复杂度。
通过按检查条件执行用于检查块是否满足检查条件的过程,有可能在复杂度方面获得好处。例如,在表22中,对于每个块顺序地检查两个检查条件。
在表21和表22的例子中,优先级被赋予给检查条件1和检查条件2。如上所述,由于对应于检查条件1和检查条件2的块具有与当前块的相同的参考图片,所以相应的块的运动矢量可以用作为当前块的运动矢量预测值候选,而无需缩放。因此,有可能降低缩放频率和复杂度。
在下文中,将描述从当前块的上侧邻近块B-1、Bn和Bn+1选择运动矢量预测值候选,也就是说,上侧运动矢量预测值的方法。除了有三个块要扫描之外,从上侧邻近块选择当前块的运动矢量预测值候选的方法基本上与从左侧邻近块选择当前块的运动矢量预测值候选的方法相同。在以下的表中数字1至12表示扫描顺序。
表23示出没有任何变化或者通过缩放,将块(在以检查条件的优先级顺序顺序地扫描在图9中的当前块900的上侧邻近块B-1、Bn和Bn+1时,其被最先检查为可用的)的运动矢量用作为当前块的空间运动矢量预测值候选的方法的例子。
<表23>
| 块B<sub>n+1</sub> | 块B<sub>n</sub> | 块B<sub>-1</sub> | |
| 检查条件1 | 1 | 5 | 9 |
| 检查条件2 | 2 | 6 | 10 |
| 检查条件3 | 3 | 7 | 11 |
| 检查条件4 | 4 | 8 | 12 |
在表23示出的例子中,检查块Bn+1是否满足检查条件中的一个。当块Bn+1不满足检查条件1的时候,检查块Bn+1是否满足检查条件2。通过以这种方法执行扫描,当块Bn+1不满足检查条件1至4的时候,顺序地检查块Bn是否满足检查条件1至4中的一个。当块Bn不满足检查条件1至4的时候,顺序地检查块B-1是否满足检查条件1至4中的一个。
当在扫描的过程中块满足检查条件的时候,该编码器或者解码器停止扫描,并且将相应的块的运动矢量选择作为当前块的运动矢量预测值候选。该编码器或者解码器可以缩放邻近块的运动矢量,并且必要时,可以将缩放的运动矢量用作为运动矢量预测值候选。例如,当邻近块的参考图片与当前块的参考图片不同的时候,该编码器或者解码器可以缩放相应的邻近块的运动矢量,并且可以将缩放的运动矢量用作为运动矢量预测值候选。此时,由表达式1或者表达式2表示的方法可以用作为缩放方法。
表24示出没有任何变化或者通过缩放,将块(在以检查条件的优先级顺序顺序地扫描在图9中的当前块900的上侧邻近块B-1、Bn和Bn+1时,其被最先检查为可用的)的运动矢量用作为当前块的空间运动矢量预测值候选的方法的例子。
<表24>
| 块B<sub>n+1</sub> | 块B<sub>n</sub> | 块B<sub>-1</sub> | |
| 检查条件1 | 1 | 2 | 3 |
| 检查条件2 | 4 | 5 | 6 |
| 检查条件3 | 7 | 8 | 9 |
| 检查条件4 | 10 | 11 | 12 |
在表24示出的例子中,检查块Bn+1是否满足检查条件1。当块Bn+1不满足检查条件1的时候,检查块Bn是否满足检查条件1。当块Bn不满足检查条件1的时候,检查块B-1是否满足检查条件1。当块B-1不满足检查条件1的时候,以从Bn+1到B-1的顺序顺序地检查块是否满足检查条件2。当块不满足检查条件2的时候,以这种方法以扫描顺序顺序地检查满足检查条件1至4中的一个的块是否存在于块Bn+1、Bn、B-1中。
当在扫描的过程中搜索到满足检查条件的块的时候,该编码器或者解码器停止扫描,并且将相应的块的运动矢量选择作为当前块的运动矢量预测值候选。该编码器或者解码器可以缩放邻近块的运动矢量,并且必要时,可以将缩放的运动矢量用作为运动矢量预测值候选。例如,当邻近块的参考图片与当前块的参考图片不同的时候,该编码器或者解码器可以缩放相应的邻近块的运动矢量,并且可以将缩放的运动矢量用作为运动矢量预测值候选。此时,由表达式1或者表达式2表示的方法可以用作为缩放方法。
表25示出没有任何变化或者通过缩放,将块(在以检查条件的优先级顺序顺序地扫描在图9中的当前块900的上侧邻近块B-1、Bn和Bn+1时,其被最先检查为可用的)的运动矢量用作为当前块的空间运动矢量预测值候选的方法的例子。
<表25>
| 块B<sub>n+1</sub> | 块B<sub>n</sub> | 块B<sub>-1</sub> | |
| 检查条件1 | 1 | 2 | 3 |
| 检查条件2 | 4 | 7 | 10 |
| 检查条件3 | 5 | 8 | 11 |
| 检查条件4 | 6 | 9 | 12 |
在表25示出的例子中,以Bn+1、Bn、B-1的顺序检查块是否满足检查条件1。当没有满足检查条件1的上侧邻近块的时候,顺序地检查块Bn+1是否满足检查条件2至4。当块Bn+1不满足检查条件2至4的时候,顺序地检查块Bn是否满足检查条件2至4中的一个。当块Bn不满足检查条件2至4的时候,顺序地检查块B-1是否满足检查条件2至4中的一个。
当在扫描的过程中搜索到满足检查条件的块的时候,该编码器或者解码器停止扫描,并且将相应的块的运动矢量选择作为当前块的运动矢量预测值候选。该编码器或者解码器可以缩放邻近块的运动矢量,并且必要时,可以将缩放的运动矢量用作为运动矢量预测值候选。例如,当邻近块的参考图片与当前块的参考图片不同的时候,该编码器或者解码器可以缩放相应的邻近块的运动矢量,并且可以将缩放的运动矢量用作为运动矢量预测值候选。此时,由表达式1或者表达式2表示的方法可以用作为缩放方法。
表26示出没有任何变化或者通过缩放,将块(在以检查条件的优先级顺序顺序地扫描在图9中的当前块900的上侧邻近块B-1、Bn和Bn+1时,其被最先检查为可用的)的运动矢量用作为当前块的空间运动矢量预测值候选的方法的例子。
<表26>
| 块B<sub>n+1</sub> | 块B<sub>n</sub> | 块B<sub>-1</sub> | |
| 检查条件1 | 1 | 2 | 3 |
| 检查条件2 | 4 | 5 | 6 |
| 检查条件3 | 7 | 9 | 11 |
| 检查条件4 | 8 | 10 | 12 |
在表26示出的例子中,与表25的例子不同,其顺序地检查块Bn+1、Bn和B-1是否满足相应的各个检查条件,并且其顺序地检查每个块是否满足检查条件3和3。例如,其以Bn+1、Bn和B-1的顺序检查是否满足检查条件1。当没有满足检查条件1的上侧邻近块的时候,其以Bn+1、Bn和B-1的顺序顺序地检查是否满足检查条件2。当没有满足检查条件1和2中的一个的上侧块的时候,顺序地检查块Bn+1是否满足检查条件3和4中的一个。当块Bn+1不满足检查条件3和4的时候,顺序地检查块Bn是否满足检查条件3和4中的一个。当块Bn不满足检查条件2至4的时候,顺序地检查块B-1是否满足检查条件3和4中的一个。
当在扫描的过程中搜索到满足检查条件的块的时候,该编码器或者解码器停止扫描,并且将相应的块的运动矢量选择作为当前块的运动矢量预测值候选。该编码器或者解码器可以缩放邻近块的运动矢量,并且必要时,可以将缩放的运动矢量用作为运动矢量预测值候选。例如,当邻近块的参考图片与当前块的参考图片不同的时候,该编码器或者解码器可以缩放相应的邻近块的运动矢量,并且可以将缩放的运动矢量用作为运动矢量预测值候选。此时,由表达式1或者表达式2表示的方法可以用作为缩放方法。
表27示出没有任何变化或者通过缩放,将块(在以检查条件的优先级顺序顺序地扫描在图9中的当前块900的上侧邻近块B-1、Bn和Bn+1时,其被最先检查为可用的)的运动矢量用作为当前块的空间运动矢量预测值候选的方法的例子。
<表27>
| 块B<sub>n+1</sub> | 块B<sub>n</sub> | 块B<sub>-1</sub> | |
| 检查条件1 | 1 | 3 | 5 |
| 检查条件2 | 2 | 4 | 6 |
| 检查条件3 | 7 | 9 | 11 |
| 检查条件4 | 8 | 10 | 12 |
在表27示出的例子中,类似于表22的例子,检查每个块是否满足两个检查条件。具体地,该编码器或者解码器顺序地检查块Bn+1是否满足检查条件1和2中的一个。当块Bn+1不满足检查条件1和2的时候,顺序地检查块Bn是否满足检查条件1和2中的一个。当块Bn不满足检查条件1和2的时候,顺序地检查块B-1是否满足检查条件1和2中的一个。当上侧块不满足检查条件1和2的时候,顺序地检查块Bn+1是否满足检查条件3和4中的一个。当块Bn+1不满足检查条件3和4的时候,顺序地检查块Bn是否满足检查条件3和4中的一个。当块Bn不满足检查条件3和4的时候,顺序地检查块B-1是否满足检查条件3和4中的一个。
当在扫描的过程中搜索到满足检查条件的块的时候,该编码器或者解码器停止扫描,并且将相应的块的运动矢量选择作为当前块的运动矢量预测值候选。该编码器或者解码器可以缩放邻近块的运动矢量,并且必要时,可以将缩放的运动矢量用作为运动矢量预测值候选。例如,当邻近块的参考图片与当前块的参考图片不同的时候,该编码器或者解码器可以缩放相应的邻近块的运动矢量,并且可以将缩放的运动矢量用作为运动矢量预测值候选。此时,由表达式1或者表达式2表示的方法可以用作为缩放方法。
如可以从表23至27中看到的,类似于从当前块的左侧块计算当前块的运动矢量预测值候选,可以应用各种扫描顺序,以从当前块的上侧块计算当前块的运动矢量预测值候选。
在从顶侧块计算当前块的运动矢量预测值候选,也就是说,顶侧运动矢量候选的方法中,执行扫描的情形的数目可以被减少以便降低复杂度。例如,可以仅仅在检查是否满足检查条件1的扫描中,或者对于每个检查条件执行首次扫描操作的扫描中,执行扫描。在这种情况下,在表23示出的例子中以6、78、10、11和12的顺序的扫描可以被省略。
类似于表21和22的例子,表26和27的例子示出将优先级赋予给检查条件1和2的方法。由于对应于检查条件1和2的块参考与当前块的相同的参考图片(例如,当前预测单元),所以其运动矢量可以用作当前块的运动矢量预测值候选,而无需缩放。因此,有可能在缩放运动矢量方面降低复杂度。
另一方面,除了以上提及的扫描方法之外,可以应用检查条件的各种组合、检查条件的各种顺序,和块位置的顺序。以上提及的扫描方法可以以组合方式应用。
在本说明书中,使用了术语“运动矢量预测值”,但是,这是为了解释方便起见,并且运动矢量预测值可以称作预测的运动矢量(PMV)等等。
在图4、5、7、8和9中,当前块和当前块的邻近块可以是预测单元。在图4、5、7、8和9中,当前块和当前块的邻近块可以是编码单元。此外,在图4、5、7、8和9中,当前块和当前块的邻近块可以是变换单元。因此,参考图4、5、7、8和9描述的细节可以类似地应用于当前块和当前块的邻近块是编码单元或者变换单元的情形。
另一方面,本说明书描述了选择运动矢量预测值候选,并且使用选择的运动矢量预测值候选对当前块执行预测的过程由编码器或者解码器执行,但是,这是为了解释方便起见,并且本发明不局限于这种配置。选择运动矢量预测值候选,并且使用选择的运动矢量预测值候选对当前块执行预测的过程可以由编码器或者解码器中的预先确定的模块或者单元执行。例如,由编码器或者解码器执行的选择运动矢量预测值候选,并且使用选择的运动矢量预测值候选对当前块执行预测的过程可以由编码器或者解码器中的预测模块执行。
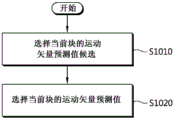
图10是按照本发明示意地举例说明选择当前块的运动矢量预测值的方法的流程图。在图10中示出的步骤可以由编码器或者解码器执行。编码器或者解码器的预测模块可以执行在图10中示出的步骤。在这里,为了解释便利的目的,假设在编码器或者解码器中的预测单元执行在图10中示出的步骤。
参考图10,该预测模块选择当前块的运动矢量预测值候选(S1010)。该预测模块可以将当前块的邻近块当中的被搜索为是可用的第一块的运动矢量选择作为当前块的运动矢量预测值候选。此时,在将当前块的邻近块划分为预先确定的组之后,该预测模块可以执行搜索过程,并且可以选择用于每个组的当前块的运动矢量预测值候选。
此时,可用块可以是在中间预测模式中要编码/解码的块,并且可以是满足以上提及的检查条件的块。划分当前块的邻近块的方法如上所述。
该预测模块可以缩放被搜索为是可用的第一块的运动矢量,并且可以将缩放的运动矢量选择作为当前块的运动矢量预测值候选。例如,当被搜索为是可用的第一块满足检查条件3或者4的时候,该预测模块可以缩放相应的块的运动矢量。特定的缩放方法如上所述。
当可以从空间邻近块获得的运动矢量预测值候选的数目小于预先确定的数目的时候,该预测模块可以从时间邻近块获得运动矢量预测值候选。
该预测模块在运动矢量预测值候选当中选择当前块的运动矢量预测值(S1020)。该预测模块使用选择的运动矢量预测值候选构建运动矢量预测值列表。该编码器的预测模块从运动矢量预测值列表选择运动矢量预测值,该运动矢量预测值使将要发送的数据量减到最小。该解码器的预测模块从运动矢量预测值列表中选择运动矢量预测值,该运动矢量预测值由从编码器发送的运动矢量预测值信息(例如,运动矢量预测值索引)来表示,并且对当前块执行预测。
虽然已经基于一系列的步骤或者流程图描述了在以上提及的示范系统中的方法,但本发明不局限于该步骤的顺序,并且某个步骤可以以除了如上所述的顺序来执行,或者与如上所述同时来执行。以上提及的实施例包括各种例子。
因此,本发明包括同时地应用或者合并以上提及的实施例的实施例。
Claims (7)
1.一种通过解码设备执行的视频解码方法,所述方法包括:
导出上块组中的邻近块用于选择当前块的运动矢量预测值;
检查是否所述邻近块中的至少一个满足第一条件,所述第一条件是:块具有与所述当前块的参考图片相同的参考图片以及与所述当前块的参考图片列表相同的参考图片列表;
检查所述邻近块中的至少一个是否满足第二条件,所述第二条件是:块具有与所述当前块的参考图片相同的参考图片以及与所述当前块的参考图片列表不同的参考图片列表;
检查所述邻近块中的至少一个是否满足第三条件,所述第三条件是:块具有与所述当前块的参考图片不同的参考图片以及与所述当前块的参考图片列表相同的参考图片列表,或者检查所述邻近块中的至少一个是否满足第四条件,所述第四条件是:块具有与所述当前块的参考图片不同的参考图片以及与所述当前块的参考图片列表不同的参考图片列表;
基于所述上块组中的所述邻近块导出运动矢量预测值候选;
基于包括所述运动矢量预测值候选的运动矢量预测候选列表选择所述当前块的所述运动矢量预测值;
基于所述运动矢量预测值导出所述当前块的运动矢量;
基于所述当前块的所述运动矢量生成所述当前块的预测块;以及
基于所述预测块生成重建图片,
其中,所述上块组中的所述邻近块包括右上邻近块、上邻近块和左上邻近块,
其中,如果存在满足所述第一条件或所述第二条件的所述上块组中的可用块,则通过使用基于特定扫描顺序在所述上块组中满足所述第一条件或者所述第二条件的排序第一的块的运动矢量,导出所述运动矢量预测值候选,
其中,在所述上块组中,基于从所述右上邻近块到所述上邻近块到所述左上邻近块的所述特定扫描顺序检查是否满足所述第一条件或者所述第二条件,
其中,当所述右上邻近块不满足所述第一条件和所述第二条件二者时,检查是否所述上邻近块满足所述第一条件或者所述第二条件,
其中,当所述上邻近块不满足所述第一条件和所述第二条件二者时,检查是否所述左上邻近块满足所述第一条件或者所述第二条件,以及
其中,如果在所述上块组中的所有可用块不满足所述第一条件和所述第二条件,则基于在所述上块组中基于所述特定扫描顺序满足所述第三条件或者所述第四条件的排序第一的块的运动矢量,导出所述运动矢量预测值候选。
2.根据权利要求1所述的方法,其中,通过缩放在所述上块组中满足所述第三条件或者所述第四条件的排序第一的块的所述运动矢量,导出所述运动矢量预测值候选。
3.根据权利要求2所述的方法,其中,基于DistScaleFactor执行所述缩放,所述DistScaleFactor等于Clip3(-4096,4095,(tb*tx+32)>>6),在此,tx=(16384+(Abs(td)/2))/td,tb是在所述当前块的参考图片与所述当前块之间的距离,td是在所述上块组中满足所述第三条件或者所述第四条件的所述排序第一的块的参考图片与所述当前图片之间的距离。
4.一种视频解码设备,所述设备包括:
预测模块,所述预测模块用于:
导出上块组中的邻近块用于选择当前块的运动矢量预测值;
检查是否所述邻近块中的至少一个满足第一条件,所述第一条件是:块具有与所述当前块的参考图片相同的参考图片以及与所述当前块的参考图片列表相同的参考图片列表;
检查所述邻近块中的至少一个是否满足第二条件,所述第二条件是:块具有与所述当前块的参考图片相同的参考图片以及与所述当前块的参考图片列表不同的参考图片列表;
检查所述邻近块中的至少一个是否满足第三条件,所述第三条件是:块具有与所述当前块的参考图片不同的参考图片以及与所述当前块的参考图片列表相同的参考图片列表,或者检查所述邻近块中的至少一个是否满足第四条件,所述第四条件是:块具有与所述当前块的参考图片不同的参考图片以及与所述当前块的参考图片列表不同的参考图片列表;
基于所述上块组中的所述邻近块导出运动矢量预测值候选;
基于包括所述运动矢量预测值候选的运动矢量预测候选列表选择所述当前块的所述运动矢量预测值;
基于所述运动矢量预测值导出所述当前块的运动矢量;并且
基于所述当前块的所述运动矢量生成所述当前块的预测块,以及
加法器模块,所述加法器模块用于基于所述预测块生成重建图片,
其中,所述上块组中的所述邻近块包括右上邻近块、上邻近块和左上邻近块,
其中,如果存在满足所述第一条件或所述第二条件的所述上块组中的可用块,则通过使用基于特定扫描顺序在所述上块组中满足所述第一条件或者所述第二条件的排序第一的块的运动矢量,导出所述运动矢量预测值候选,
其中,在所述上块组中,基于从所述右上邻近块到所述上邻近块到所述左上邻近块的所述特定扫描顺序检查是否满足所述第一条件或者所述第二条件,
其中,当所述右上邻近块不满足所述第一条件和所述第二条件二者时,检查是否所述上邻近块满足所述第一条件或者所述第二条件,
其中,当所述上邻近块不满足所述第一条件和所述第二条件二者时,检查是否所述左上邻近块满足所述第一条件或者所述第二条件,
其中,如果在所述上块组中的所有可用块不满足所述第一条件和所述第二条件,则基于在所述上块组中基于所述特定扫描顺序满足所述第三条件或者所述第四条件的排序第一的块的运动矢量,导出所述运动矢量预测值候选。
5.根据权利要求4所述的设备,其中,通过缩放在所述上块组中满足所述第三条件或者所述第四条件的排序第一的块的所述运动矢量,导出所述运动矢量预测值候选。
6.根据权利要求5所述的设备,其中,基于DistScaleFactor执行所述缩放,所述DistScaleFactor等于Clip3(-4096,4095,(tb*tx+32)>>6),在此,tx=(16384+(Abs(td)/2))/td,tb是在所述当前块的参考图片与所述当前块之间的距离,td是在所述上块组中满足所述第三条件或者所述第四条件的所述排序第一的块的参考图片与所述当前图片之间的距离。
7.一种通过编码设备执行的视频编码方法,所述方法包括:
导出上块组中的邻近块用于选择当前块的运动矢量预测值;
检查是否所述邻近块中的至少一个满足第一条件,所述第一条件是:块具有与所述当前块的参考图片相同的参考图片以及与所述当前块的参考图片列表相同的参考图片列表;
检查所述邻近块中的至少一个是否满足第二条件,所述第二条件是:块具有与所述当前块的参考图片相同的参考图片以及与所述当前块的参考图片列表不同的参考图片列表;
检查所述邻近块中的至少一个是否满足第三条件,所述第三条件是:块具有与所述当前块的参考图片不同的参考图片以及与所述当前块的参考图片列表相同的参考图片列表,或者检查所述邻近块中的至少一个是否满足第四条件,所述第四条件是:块具有与所述当前块的参考图片不同的参考图片以及与所述当前块的参考图片列表不同的参考图片列表;
基于所述上块组中的所述邻近块导出运动矢量预测值候选;
基于包括所述运动矢量预测值候选的运动矢量预测候选列表选择所述当前块的所述运动矢量预测值;
生成所述当前块的所述运动矢量预测值的索引和用于所述当前块的参考图片索引;
其中,所述上块组中的所述邻近块包括右上邻近块、上邻近块和左上邻近块,
其中,如果存在满足所述第一条件或所述第二条件的所述上块组中的可用块,则通过使用基于特定扫描顺序在所述上块组中满足所述第一条件或者所述第二条件的排序第一的块的运动矢量,导出所述运动矢量预测值候选,
其中,在所述上块组中,基于从所述右上邻近块到所述上邻近块到所述左上邻近块的所述特定扫描顺序检查是否满足所述第一条件或者所述第二条件,
其中,当所述右上邻近块不满足所述第一条件和所述第二条件二者时,检查是否所述上邻近块满足所述第一条件或者所述第二条件,
其中,当所述上邻近块不满足所述第一条件和所述第二条件二者时,检查是否所述左上邻近块满足所述第一条件或者所述第二条件,以及
其中,如果在所述上块组中的所有可用块不满足所述第一条件和所述第二条件,则基于在所述上块组中基于所述特定扫描顺序满足所述第三条件或者所述第四条件的排序第一的块的运动矢量,导出所述运动矢量预测值候选。
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201161454995P | 2011-03-21 | 2011-03-21 | |
| US61/454,995 | 2011-03-21 | ||
| US201161466446P | 2011-03-22 | 2011-03-22 | |
| US61/466,446 | 2011-03-22 | ||
| CN201280023199.9A CN103535040B (zh) | 2011-03-21 | 2012-03-21 | 选择运动矢量预测值的方法和使用其的设备 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201280023199.9A Division CN103535040B (zh) | 2011-03-21 | 2012-03-21 | 选择运动矢量预测值的方法和使用其的设备 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN107948657A CN107948657A (zh) | 2018-04-20 |
| CN107948657B true CN107948657B (zh) | 2021-05-04 |
Family
ID=46879891
Family Applications (5)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201711159268.XA Active CN107979758B (zh) | 2011-03-21 | 2012-03-21 | 选择运动矢量预测值的方法和使用其的设备 |
| CN201711159361.0A Active CN107979759B (zh) | 2011-03-21 | 2012-03-21 | 选择运动矢量预测值的方法和使用其的设备 |
| CN201711159350.2A Active CN107948658B (zh) | 2011-03-21 | 2012-03-21 | 选择运动矢量预测值的方法和使用其的设备 |
| CN201280023199.9A Active CN103535040B (zh) | 2011-03-21 | 2012-03-21 | 选择运动矢量预测值的方法和使用其的设备 |
| CN201711159081.XA Active CN107948657B (zh) | 2011-03-21 | 2012-03-21 | 选择运动矢量预测值的方法和使用其的设备 |
Family Applications Before (4)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201711159268.XA Active CN107979758B (zh) | 2011-03-21 | 2012-03-21 | 选择运动矢量预测值的方法和使用其的设备 |
| CN201711159361.0A Active CN107979759B (zh) | 2011-03-21 | 2012-03-21 | 选择运动矢量预测值的方法和使用其的设备 |
| CN201711159350.2A Active CN107948658B (zh) | 2011-03-21 | 2012-03-21 | 选择运动矢量预测值的方法和使用其的设备 |
| CN201280023199.9A Active CN103535040B (zh) | 2011-03-21 | 2012-03-21 | 选择运动矢量预测值的方法和使用其的设备 |
Country Status (14)
| Country | Link |
|---|---|
| US (6) | US9374598B2 (zh) |
| EP (4) | EP2690870B1 (zh) |
| JP (8) | JP5981528B2 (zh) |
| KR (4) | KR102005088B1 (zh) |
| CN (5) | CN107979758B (zh) |
| DK (1) | DK2690870T3 (zh) |
| ES (3) | ES2944310T3 (zh) |
| FI (1) | FI3937497T3 (zh) |
| HR (1) | HRP20230425T1 (zh) |
| HU (3) | HUE061938T2 (zh) |
| PL (3) | PL2690870T3 (zh) |
| PT (1) | PT2690870T (zh) |
| SI (2) | SI3937497T1 (zh) |
| WO (1) | WO2012128540A2 (zh) |
Families Citing this family (87)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8406301B2 (en) | 2002-07-15 | 2013-03-26 | Thomson Licensing | Adaptive weighting of reference pictures in video encoding |
| EP2687015A4 (en) | 2011-03-14 | 2014-12-17 | Mediatek Inc | METHOD AND DEVICE FOR OBTAINING PREDICTIONS FOR TEMPORARY MOTION VECTORS |
| PL2690870T3 (pl) * | 2011-03-21 | 2020-07-27 | Lg Electronics Inc. | Sposób wyboru predyktora wektora ruchu i urządzenie go stosujące |
| BR122020013893B1 (pt) | 2011-05-31 | 2022-08-23 | JVC Kenwood Corporation | Dispositivo de codificação de imagem móvel e método de codificação de imagem móvel |
| US10264276B2 (en) * | 2011-06-14 | 2019-04-16 | Samsung Electronics Co., Ltd. | Method and apparatus for encoding motion information and method and apparatus for decoding same |
| KR20120140592A (ko) | 2011-06-21 | 2012-12-31 | 한국전자통신연구원 | 움직임 보상의 계산 복잡도 감소 및 부호화 효율을 증가시키는 방법 및 장치 |
| WO2012177052A2 (ko) | 2011-06-21 | 2012-12-27 | 한국전자통신연구원 | 인터 예측 방법 및 그 장치 |
| KR102008030B1 (ko) | 2011-06-23 | 2019-08-06 | 선 페이턴트 트러스트 | 화상 복호 방법, 화상 부호화 방법, 화상 복호 장치, 화상 부호화 장치 및 화상 부호화 복호 장치 |
| USRE47366E1 (en) | 2011-06-23 | 2019-04-23 | Sun Patent Trust | Image decoding method and apparatus based on a signal type of the control parameter of the current block |
| JPWO2012176465A1 (ja) | 2011-06-24 | 2015-02-23 | パナソニック株式会社 | 復号方法及び復号装置 |
| KR102067683B1 (ko) | 2011-06-24 | 2020-01-17 | 선 페이턴트 트러스트 | 화상 복호 방법, 화상 부호화 방법, 화상 복호 장치, 화상 부호화 장치 및 화상 부호화 복호 장치 |
| JP6322136B2 (ja) | 2011-06-27 | 2018-05-09 | サムスン エレクトロニクス カンパニー リミテッド | 動き情報の符号化方法及び該装置、その復号化方法及び該装置 |
| EP2725793A4 (en) | 2011-06-27 | 2014-12-03 | Panasonic Ip Corp America | IMAGE DECODING METHOD, IMAGE ENCODING METHOD, IMAGE DECODING DEVICE, IMAGE ENCODING DEVICE, AND IMAGE ENCODING / DECODING DEVICE |
| MX2013012980A (es) | 2011-06-28 | 2013-12-06 | Panasonic Corp | Metodo de decodificacion de imagenes, metodo de codificacion de imagenes, aparato de decodificacion de imagenes, aparato de codificacion de imagenes y aparato de codificacion y decodififcacion de imagenes. |
| WO2013001767A1 (ja) | 2011-06-29 | 2013-01-03 | パナソニック株式会社 | 画像復号方法、画像符号化方法、画像復号装置、画像符号化装置及び画像符号化復号装置 |
| KR102007047B1 (ko) | 2011-06-30 | 2019-08-02 | 선 페이턴트 트러스트 | 화상 복호 방법, 화상 부호화 방법, 화상 복호 장치, 화상 부호화 장치 및 화상 부호화 복호 장치 |
| WO2013001769A1 (ja) | 2011-06-30 | 2013-01-03 | パナソニック株式会社 | 画像復号方法、画像符号化方法、画像復号装置、画像符号化装置及び画像符号化復号装置 |
| RU2604680C2 (ru) | 2011-07-11 | 2016-12-10 | Сан Пэтент Траст | Способ декодирования изображений, способ кодирования изображений, устройство декодирования изображений, устройство кодирования изображений и устройство кодирования и декодирования изображений |
| JP5958165B2 (ja) * | 2011-08-12 | 2016-07-27 | 株式会社Jvcケンウッド | 画像復号装置、画像復号方法、画像復号プログラム、受信装置、受信方法及び受信プログラム |
| US9300975B2 (en) * | 2011-09-11 | 2016-03-29 | Texas Instruments Incorporated | Concurrent access shared buffer in a video encoder |
| KR20130030181A (ko) | 2011-09-16 | 2013-03-26 | 한국전자통신연구원 | 움직임 벡터 예측기를 이용한 움직임 벡터 부호화/복호화 방법 및 장치 |
| KR102219907B1 (ko) | 2012-04-23 | 2021-02-25 | 삼성전자주식회사 | 다시점 비디오 부호화 방법 및 장치, 다시점 비디오 복호화 방법 및 장치 |
| US9485515B2 (en) * | 2013-08-23 | 2016-11-01 | Google Inc. | Video coding using reference motion vectors |
| US10708588B2 (en) | 2013-06-19 | 2020-07-07 | Apple Inc. | Sample adaptive offset control |
| KR101712110B1 (ko) * | 2013-07-12 | 2017-03-13 | 삼성전자 주식회사 | 변이 벡터 유도를 사용하는 비디오 부호화 방법 및 그 장치, 비디오 복호화 방법 및 그 장치 |
| US20150036747A1 (en) * | 2013-07-30 | 2015-02-05 | Electronics And Telecommunications Research Institute | Encoding and decoding apparatus for concealing error in video frame and method using same |
| AU2013403224B2 (en) | 2013-10-14 | 2018-10-18 | Microsoft Technology Licensing, Llc | Features of intra block copy prediction mode for video and image coding and decoding |
| EP3058736B1 (en) | 2013-10-14 | 2019-02-27 | Microsoft Technology Licensing, LLC | Encoder-side options for intra block copy prediction mode for video and image coding |
| KR102258427B1 (ko) * | 2014-01-03 | 2021-06-01 | 마이크로소프트 테크놀로지 라이센싱, 엘엘씨 | 비디오 및 이미지 코딩/디코딩에서의 블록 벡터 예측 |
| US10390034B2 (en) | 2014-01-03 | 2019-08-20 | Microsoft Technology Licensing, Llc | Innovations in block vector prediction and estimation of reconstructed sample values within an overlap area |
| US11284103B2 (en) | 2014-01-17 | 2022-03-22 | Microsoft Technology Licensing, Llc | Intra block copy prediction with asymmetric partitions and encoder-side search patterns, search ranges and approaches to partitioning |
| BR112016017201B1 (pt) * | 2014-01-29 | 2023-09-26 | Hfi Innovation Inc | Método de codificação e decodificação para precisão adaptativa de vetor de movimento de um bloco de dados de vídeo |
| CN109889850A (zh) * | 2014-02-21 | 2019-06-14 | 联发科技(新加坡)私人有限公司 | 视频编解码方法 |
| US10368091B2 (en) | 2014-03-04 | 2019-07-30 | Microsoft Technology Licensing, Llc | Block flipping and skip mode in intra block copy prediction |
| EP4354856A2 (en) | 2014-06-19 | 2024-04-17 | Microsoft Technology Licensing, LLC | Unified intra block copy and inter prediction modes |
| CN112087630B (zh) * | 2014-09-30 | 2022-04-08 | 华为技术有限公司 | 图像预测方法、装置、解码器及存储介质 |
| RU2679201C2 (ru) | 2014-09-30 | 2019-02-06 | МАЙКРОСОФТ ТЕКНОЛОДЖИ ЛАЙСЕНСИНГ, ЭлЭлСи | Правила для режимов внутрикадрового прогнозирования, когда активируется волновая параллельная обработка данных |
| US9992512B2 (en) * | 2014-10-06 | 2018-06-05 | Mediatek Inc. | Method and apparatus for motion vector predictor derivation |
| CN112584140A (zh) | 2014-11-27 | 2021-03-30 | 株式会社Kt | 对视频信号进行解码或编码的方法 |
| US10469864B2 (en) * | 2014-11-27 | 2019-11-05 | Kt Corporation | Method and apparatus for video signal coding using current picture reference flag |
| US10735762B2 (en) * | 2014-12-26 | 2020-08-04 | Sony Corporation | Image processing apparatus and image processing method |
| JP2015111910A (ja) * | 2015-01-30 | 2015-06-18 | 株式会社Jvcケンウッド | 動画像復号装置、動画像復号方法、動画像復号プログラム、受信装置、受信方法、及び受信プログラム |
| KR20240000649A (ko) * | 2015-08-24 | 2024-01-02 | 엘지전자 주식회사 | 인터 예측 모드 기반 영상 처리 방법 및 이를 위한 장치 |
| WO2017039117A1 (ko) * | 2015-08-30 | 2017-03-09 | 엘지전자(주) | 영상의 부호화/복호화 방법 및 이를 위한 장치 |
| EP3357245A4 (en) * | 2015-11-05 | 2019-03-13 | MediaTek Inc. | METHOD AND DEVICE OF INTERPRESSATION USING AN AVERAGE MOTION VECTOR FOR VIDEO CODING |
| WO2017082443A1 (ko) * | 2015-11-13 | 2017-05-18 | 엘지전자 주식회사 | 영상 코딩 시스템에서 임계값을 이용한 적응적 영상 예측 방법 및 장치 |
| EP3395072A4 (en) * | 2015-12-22 | 2019-05-22 | RealNetworks, Inc. | SELECTION AND PREDICTION OF MOTION VECTOR IN VIDEO ENCODING SYSTEMS AND METHODS |
| EP3264768A1 (en) | 2016-06-30 | 2018-01-03 | Thomson Licensing | Method and apparatus for video coding with adaptive motion information refinement |
| KR20180057789A (ko) * | 2016-11-22 | 2018-05-31 | 광운대학교 산학협력단 | 전방향 카메라에서 효과적인 차분 움직임 백터 전송방법을 이용한 비디오 코딩 방법 및 방법 및 장치 |
| KR102586198B1 (ko) * | 2017-01-02 | 2023-10-06 | 한양대학교 산학협력단 | 화면 간 예측을 이용한 영상 복호화 방법 및 장치 |
| WO2018124855A1 (ko) | 2017-01-02 | 2018-07-05 | 한양대학교 산학협력단 | 화면 간 예측을 이용한 영상 복호화 방법 및 장치 |
| US10602180B2 (en) | 2017-06-13 | 2020-03-24 | Qualcomm Incorporated | Motion vector prediction |
| CN116016921A (zh) * | 2017-07-07 | 2023-04-25 | 三星电子株式会社 | 用于对运动矢量进行编码和解码的设备和方法 |
| EP3691274A4 (en) | 2017-09-28 | 2021-04-28 | Samsung Electronics Co., Ltd. | CODING METHOD AND DEVICE FOR IT AND DECODING METHOD AND DEVICE FOR IT |
| CN117014604A (zh) | 2017-09-28 | 2023-11-07 | 三星电子株式会社 | 编码方法和装置以及解码方法和装置 |
| KR102387363B1 (ko) | 2017-11-30 | 2022-04-18 | 엘지전자 주식회사 | 영상 코딩 시스템에서 인터 예측에 따른 영상 디코딩 방법 및 장치 |
| US10931963B2 (en) | 2017-12-07 | 2021-02-23 | Tencent America LLC | Method and apparatus for video coding |
| US10986349B2 (en) | 2017-12-29 | 2021-04-20 | Microsoft Technology Licensing, Llc | Constraints on locations of reference blocks for intra block copy prediction |
| US11394992B2 (en) * | 2018-03-14 | 2022-07-19 | Hfi Innovation Inc. | Methods and apparatuses of generating average candidates in video coding systems |
| WO2019194462A1 (ko) * | 2018-04-01 | 2019-10-10 | 엘지전자 주식회사 | 인터 예측 모드 기반 영상 처리 방법 및 이를 위한 장치 |
| CN117294837A (zh) | 2018-04-02 | 2023-12-26 | 深圳市大疆创新科技有限公司 | 用于图像处理的方法和图像处理装置 |
| CN117640949A (zh) | 2018-05-23 | 2024-03-01 | 松下电器(美国)知识产权公司 | 解码装置和编码装置 |
| US11503300B2 (en) * | 2018-05-25 | 2022-11-15 | Hfi Innovation Inc. | Method and apparatus of affine mode motion-vector prediction derivation for video coding system |
| US10587885B2 (en) * | 2018-06-04 | 2020-03-10 | Tencent America LLC | Method and apparatus for merge mode with additional middle candidates in video coding |
| WO2019237287A1 (zh) * | 2018-06-13 | 2019-12-19 | 华为技术有限公司 | 视频图像的帧间预测方法、装置及编解码器 |
| KR20240005239A (ko) * | 2018-06-29 | 2024-01-11 | 베이징 바이트댄스 네트워크 테크놀로지 컴퍼니, 리미티드 | Lut와 amvp 사이의 상호작용 |
| TWI744661B (zh) | 2018-06-29 | 2021-11-01 | 大陸商北京字節跳動網絡技術有限公司 | 要根據模式檢查的查找表中的運動候選的數量 |
| KR20210025537A (ko) | 2018-06-29 | 2021-03-09 | 베이징 바이트댄스 네트워크 테크놀로지 컴퍼니, 리미티드 | 하나 또는 다수의 룩업 테이블들을 사용하여 이전에 코딩된 모션 정보를 순서대로 저장하고 이를 사용하여 후속 블록들을 코딩하는 개념 |
| CN114845108A (zh) | 2018-06-29 | 2022-08-02 | 抖音视界(北京)有限公司 | 查找表的更新:fifo、约束的fifo |
| US11019357B2 (en) * | 2018-08-07 | 2021-05-25 | Qualcomm Incorporated | Motion vector predictor list generation |
| CN112585972B (zh) * | 2018-08-17 | 2024-02-09 | 寰发股份有限公司 | 视频编解码的帧间预测方法及装置 |
| CN110868601B (zh) * | 2018-08-28 | 2024-03-15 | 华为技术有限公司 | 帧间预测方法、装置以及视频编码器和视频解码器 |
| US10958932B2 (en) | 2018-09-12 | 2021-03-23 | Qualcomm Incorporated | Inter-prediction coding of video data using generated motion vector predictor list including non-adjacent blocks |
| IL311160A (en) * | 2018-09-17 | 2024-04-01 | Samsung Electronics Co Ltd | A method for encoding and decoding traffic information and a device for encoding and decoding traffic information |
| JP7412343B2 (ja) * | 2018-09-21 | 2024-01-12 | 日本放送協会 | 画像符号化装置、画像復号装置、及びプログラム |
| CN112970262B (zh) * | 2018-11-10 | 2024-02-20 | 北京字节跳动网络技术有限公司 | 三角预测模式中的取整 |
| JP7418152B2 (ja) * | 2018-12-17 | 2024-01-19 | キヤノン株式会社 | 画像符号化装置、画像符号化方法、画像復号装置、画像復号方法 |
| KR20210103558A (ko) | 2018-12-28 | 2021-08-23 | 텔레호낙티에볼라게트 엘엠 에릭슨(피유비엘) | 움직임 벡터 예측자 리스트의 생성 |
| WO2020143824A1 (en) | 2019-01-13 | 2020-07-16 | Beijing Bytedance Network Technology Co., Ltd. | Interaction between lut and shared merge list |
| WO2020147773A1 (en) | 2019-01-16 | 2020-07-23 | Beijing Bytedance Network Technology Co., Ltd. | Inserting order of motion candidates in lut |
| CN111953997A (zh) | 2019-05-15 | 2020-11-17 | 华为技术有限公司 | 候选运动矢量列表获取方法、装置及编解码器 |
| CN113994700A (zh) * | 2019-06-13 | 2022-01-28 | 北京达佳互联信息技术有限公司 | 用于视频编解码的运动矢量预测 |
| WO2020251324A1 (ko) | 2019-06-14 | 2020-12-17 | 엘지전자 주식회사 | 움직임 벡터 차분들을 이용한 영상 코딩 방법 및 장치 |
| CN110460859B (zh) * | 2019-08-21 | 2022-03-25 | 浙江大华技术股份有限公司 | 历史运动矢量列表的使用方法、编解码器及存储装置 |
| CN110213590B (zh) * | 2019-06-25 | 2022-07-12 | 浙江大华技术股份有限公司 | 时域运动矢量获取、帧间预测、视频编码的方法及设备 |
| CN114128292A (zh) * | 2019-07-01 | 2022-03-01 | 三星电子株式会社 | 用邻近运动信息对运动信息进行编码和解码的装置和方法 |
| KR102297479B1 (ko) * | 2020-04-10 | 2021-09-03 | 삼성전자주식회사 | 움직임 벡터의 부호화 장치 및 방법, 및 움직임 벡터의 복호화 장치 및 방법 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20080085823A (ko) * | 2008-09-11 | 2008-09-24 | 엘지전자 주식회사 | 모션 벡터 예측 방법 |
| JP2009017262A (ja) * | 2007-07-05 | 2009-01-22 | Sony Corp | データ処理装置、データ処理方法およびデータ処理プログラム、符号化装置、符号化方法および符号化プログラム、ならびに、復号装置、復号方法および復号プログラム |
| CN101511019A (zh) * | 2009-03-13 | 2009-08-19 | 广东威创视讯科技股份有限公司 | 一种可变模式运动估计方法及可变模式运动估计装置 |
| CN101816183A (zh) * | 2007-10-04 | 2010-08-25 | 三星电子株式会社 | 使用子像素运动估计对图像进行帧间预测编码/解码的方法和设备 |
| CN101827269A (zh) * | 2010-01-15 | 2010-09-08 | 香港应用科技研究院有限公司 | 视频编码方法和装置 |
Family Cites Families (63)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR0181069B1 (ko) * | 1995-11-08 | 1999-05-01 | 배순훈 | 움직임 추정장치 |
| KR100291719B1 (ko) * | 1998-09-30 | 2001-07-12 | 전주범 | 이진 형상 신호의 움직임 벡터 부호화 장치 및 방법 |
| JP4114859B2 (ja) | 2002-01-09 | 2008-07-09 | 松下電器産業株式会社 | 動きベクトル符号化方法および動きベクトル復号化方法 |
| KR100492127B1 (ko) | 2002-02-23 | 2005-06-01 | 삼성전자주식회사 | 적응형 움직임 추정장치 및 추정 방법 |
| US7321626B2 (en) * | 2002-03-08 | 2008-01-22 | Sharp Laboratories Of America, Inc. | System and method for predictive motion estimation using a global motion predictor |
| KR100508798B1 (ko) * | 2002-04-09 | 2005-08-19 | 엘지전자 주식회사 | 쌍방향 예측 블록 예측 방법 |
| JP2004208258A (ja) | 2002-04-19 | 2004-07-22 | Matsushita Electric Ind Co Ltd | 動きベクトル計算方法 |
| KR100491530B1 (ko) * | 2002-05-03 | 2005-05-27 | 엘지전자 주식회사 | 모션 벡터 결정 방법 |
| CN101043626B (zh) * | 2002-07-15 | 2010-06-09 | 株式会社日立制作所 | 动态图像编码方法 |
| KR100774296B1 (ko) * | 2002-07-16 | 2007-11-08 | 삼성전자주식회사 | 움직임 벡터 부호화 방법, 복호화 방법 및 그 장치 |
| KR100865034B1 (ko) * | 2002-07-18 | 2008-10-23 | 엘지전자 주식회사 | 모션 벡터 예측 방법 |
| US6925123B2 (en) * | 2002-08-06 | 2005-08-02 | Motorola, Inc. | Method and apparatus for performing high quality fast predictive motion search |
| JP4373702B2 (ja) | 2003-05-07 | 2009-11-25 | 株式会社エヌ・ティ・ティ・ドコモ | 動画像符号化装置、動画像復号化装置、動画像符号化方法、動画像復号化方法、動画像符号化プログラム及び動画像復号化プログラム |
| EP1503559A1 (fr) | 2003-07-28 | 2005-02-02 | Canal + Technologies | Procédé de détection automatique de protocole de transmission pour objet portable de type carte à puce ou clé à puce |
| KR100579542B1 (ko) | 2003-07-29 | 2006-05-15 | 삼성전자주식회사 | 블럭 간의 상관성을 고려한 움직임 추정 장치 및 방법 |
| JP2005184042A (ja) * | 2003-12-15 | 2005-07-07 | Sony Corp | 画像復号装置及び画像復号方法並びに画像復号プログラム |
| US7515637B2 (en) * | 2004-05-21 | 2009-04-07 | Broadcom Advanced Compression Group, Llc | Video decoding for motion compensation with weighted prediction |
| JP4247680B2 (ja) * | 2004-07-07 | 2009-04-02 | ソニー株式会社 | 符号化装置、符号化方法、符号化方法のプログラム及び符号化方法のプログラムを記録した記録媒体 |
| JP4250598B2 (ja) * | 2005-02-07 | 2009-04-08 | シャープ株式会社 | 動き補償型ip変換処理装置及び動き補償型ip変換処理方法 |
| CN100539693C (zh) * | 2005-08-30 | 2009-09-09 | 深圳清华大学研究院 | 快速运动估计方法 |
| JP4712643B2 (ja) * | 2006-08-17 | 2011-06-29 | 富士通セミコンダクター株式会社 | フレーム間予測処理装置、フレーム間予測方法、画像符号化装置及び画像復号装置 |
| CN101374235B (zh) * | 2007-08-24 | 2012-05-02 | 大唐移动通信设备有限公司 | 视频编码中的快速块运动估计方法和装置 |
| KR101946376B1 (ko) * | 2007-10-16 | 2019-02-11 | 엘지전자 주식회사 | 비디오 신호 처리 방법 및 장치 |
| US8908765B2 (en) * | 2007-11-15 | 2014-12-09 | General Instrument Corporation | Method and apparatus for performing motion estimation |
| CN101198064A (zh) * | 2007-12-10 | 2008-06-11 | 武汉大学 | 一种分辨率分层技术中的运动矢量预测方法 |
| WO2009115901A2 (en) * | 2008-03-19 | 2009-09-24 | Nokia Corporation | Combined motion vector and reference index prediction for video coding |
| CN101267556B (zh) * | 2008-03-21 | 2011-06-22 | 海信集团有限公司 | 快速运动估计方法及视频编解码方法 |
| KR100901647B1 (ko) * | 2008-09-11 | 2009-06-09 | 엘지전자 주식회사 | 모션 벡터 예측 방법 |
| WO2010041856A2 (en) * | 2008-10-06 | 2010-04-15 | Lg Electronics Inc. | A method and an apparatus for processing a video signal |
| KR101377527B1 (ko) * | 2008-10-14 | 2014-03-25 | 에스케이 텔레콤주식회사 | 복수 개의 참조 픽처의 움직임 벡터 부호화/복호화 방법 및장치와 그를 이용한 영상 부호화/복호화 장치 및 방법 |
| KR101625058B1 (ko) * | 2008-11-10 | 2016-05-27 | 엘지전자 주식회사 | 시점간 예측을 이용한 비디오 신호 처리 방법 및 장치 |
| TWI408620B (zh) * | 2008-12-12 | 2013-09-11 | Mstar Semiconductor Inc | 用以決定插補畫面之移動向量的影像處理方法及其相關裝置 |
| CN101931803B (zh) * | 2009-06-26 | 2013-01-09 | 华为技术有限公司 | 视频图像运动信息获取方法、装置及设备、模板构造方法 |
| CN201639717U (zh) * | 2009-07-09 | 2010-11-17 | 杭州士兰微电子股份有限公司 | 可变块尺寸运动预测装置 |
| KR101452859B1 (ko) * | 2009-08-13 | 2014-10-23 | 삼성전자주식회사 | 움직임 벡터를 부호화 및 복호화하는 방법 및 장치 |
| US9060176B2 (en) * | 2009-10-01 | 2015-06-16 | Ntt Docomo, Inc. | Motion vector prediction in video coding |
| TWI566586B (zh) * | 2009-10-20 | 2017-01-11 | 湯姆生特許公司 | 一序列形象的現時區塊之寫碼方法和重建方法 |
| KR101459714B1 (ko) * | 2009-10-28 | 2014-11-13 | 에스케이텔레콤 주식회사 | 공간 분할을 이용한 움직임 벡터 부호화/복호화 방법 및 장치와 그를 이용한 영상 부호화/복호화 방법 및 장치 |
| KR101441905B1 (ko) * | 2009-11-18 | 2014-09-24 | 에스케이텔레콤 주식회사 | 후보 예측 움직임 벡터 집합 선택을 이용한 움직임 벡터 부호화/복호화 방법 및 장치와 그를 이용한 영상 부호화/복호화 방법 및 장치 |
| CN101860754B (zh) * | 2009-12-16 | 2013-11-13 | 香港应用科技研究院有限公司 | 运动矢量编码和解码的方法和装置 |
| KR101522850B1 (ko) * | 2010-01-14 | 2015-05-26 | 삼성전자주식회사 | 움직임 벡터를 부호화, 복호화하는 방법 및 장치 |
| CN101815218B (zh) * | 2010-04-02 | 2012-02-08 | 北京工业大学 | 基于宏块特征的快速运动估计视频编码方法 |
| CN101877790B (zh) * | 2010-05-26 | 2012-01-25 | 广西大学 | 一种面向全景视频编码的快速全局运动估计方法 |
| KR101456499B1 (ko) * | 2010-07-09 | 2014-11-03 | 삼성전자주식회사 | 움직임 벡터의 부호화 방법 및 장치, 그 복호화 방법 및 장치 |
| US9124898B2 (en) * | 2010-07-12 | 2015-09-01 | Mediatek Inc. | Method and apparatus of temporal motion vector prediction |
| US9357229B2 (en) * | 2010-07-28 | 2016-05-31 | Qualcomm Incorporated | Coding motion vectors in video coding |
| KR20120016991A (ko) | 2010-08-17 | 2012-02-27 | 오수미 | 인터 프리딕션 방법 |
| US9602813B2 (en) * | 2010-08-18 | 2017-03-21 | Sk Telecom Co., Ltd. | Image encoding/decoding device and method, and reference picture indexing device and method |
| US8976856B2 (en) * | 2010-09-30 | 2015-03-10 | Apple Inc. | Optimized deblocking filters |
| US20120087411A1 (en) * | 2010-10-12 | 2012-04-12 | Apple Inc. | Internal bit depth increase in deblocking filters and ordered dither |
| US8824558B2 (en) * | 2010-11-23 | 2014-09-02 | Mediatek Inc. | Method and apparatus of spatial motion vector prediction |
| US8761245B2 (en) * | 2010-12-21 | 2014-06-24 | Intel Corporation | Content adaptive motion compensation filtering for high efficiency video coding |
| ES2957772T3 (es) * | 2011-01-07 | 2024-01-25 | Ntt Docomo Inc | Procedimiento de codificación predictiva, dispositivo de codificación predictiva y programa de codificación predictiva de un vector de movimiento, y procedimiento de descodificación predictiva, dispositivo de descodificación predictiva y programa de descodificación predictiva de un vector de movimiento |
| US10171813B2 (en) * | 2011-02-24 | 2019-01-01 | Qualcomm Incorporated | Hierarchy of motion prediction video blocks |
| PL2690870T3 (pl) * | 2011-03-21 | 2020-07-27 | Lg Electronics Inc. | Sposób wyboru predyktora wektora ruchu i urządzenie go stosujące |
| PL3419289T3 (pl) * | 2011-06-30 | 2021-04-19 | JVC Kenwood Corporation | Urządzenie do dekodowania obrazu, sposób dekodowania obrazu i program do dekodowania obrazu |
| US20130229485A1 (en) * | 2011-08-30 | 2013-09-05 | Nokia Corporation | Apparatus, a Method and a Computer Program for Video Coding and Decoding |
| TWI586155B (zh) * | 2011-09-28 | 2017-06-01 | Jvc Kenwood Corp | A motion picture decoding apparatus, a motion picture decoding method, and a recording medium |
| US9357195B2 (en) * | 2012-08-16 | 2016-05-31 | Qualcomm Incorporated | Inter-view predicted motion vector for 3D video |
| US9491461B2 (en) * | 2012-09-27 | 2016-11-08 | Qualcomm Incorporated | Scalable extensions to HEVC and temporal motion vector prediction |
| US9357214B2 (en) * | 2012-12-07 | 2016-05-31 | Qualcomm Incorporated | Advanced merge/skip mode and advanced motion vector prediction (AMVP) mode for 3D video |
| WO2015004606A1 (en) * | 2013-07-09 | 2015-01-15 | Nokia Corporation | Method and apparatus for video coding involving syntax for signalling motion information |
| WO2015056182A2 (en) * | 2013-10-15 | 2015-04-23 | Nokia Technologies Oy | Video encoding and decoding |
-
2012
- 2012-03-21 PL PL12760302T patent/PL2690870T3/pl unknown
- 2012-03-21 JP JP2014500994A patent/JP5981528B2/ja active Active
- 2012-03-21 PL PL19207944T patent/PL3627839T3/pl unknown
- 2012-03-21 HU HUE21194514A patent/HUE061938T2/hu unknown
- 2012-03-21 ES ES21194514T patent/ES2944310T3/es active Active
- 2012-03-21 KR KR1020187024037A patent/KR102005088B1/ko active IP Right Grant
- 2012-03-21 CN CN201711159268.XA patent/CN107979758B/zh active Active
- 2012-03-21 HU HUE12760302A patent/HUE048403T2/hu unknown
- 2012-03-21 DK DK12760302.5T patent/DK2690870T3/da active
- 2012-03-21 KR KR1020207014958A patent/KR102232113B1/ko active IP Right Grant
- 2012-03-21 CN CN201711159361.0A patent/CN107979759B/zh active Active
- 2012-03-21 ES ES19207944T patent/ES2900107T3/es active Active
- 2012-03-21 ES ES12760302T patent/ES2770437T3/es active Active
- 2012-03-21 EP EP12760302.5A patent/EP2690870B1/en active Active
- 2012-03-21 PL PL21194514.2T patent/PL3937497T3/pl unknown
- 2012-03-21 SI SI201232027T patent/SI3937497T1/sl unknown
- 2012-03-21 SI SI201231962T patent/SI3627839T1/sl unknown
- 2012-03-21 CN CN201711159350.2A patent/CN107948658B/zh active Active
- 2012-03-21 EP EP19207944.0A patent/EP3627839B1/en active Active
- 2012-03-21 HR HRP20230425TT patent/HRP20230425T1/hr unknown
- 2012-03-21 CN CN201280023199.9A patent/CN103535040B/zh active Active
- 2012-03-21 WO PCT/KR2012/001999 patent/WO2012128540A2/ko active Application Filing
- 2012-03-21 EP EP23151197.3A patent/EP4184918B1/en active Active
- 2012-03-21 US US14/006,336 patent/US9374598B2/en active Active
- 2012-03-21 FI FIEP21194514.2T patent/FI3937497T3/fi active
- 2012-03-21 CN CN201711159081.XA patent/CN107948657B/zh active Active
- 2012-03-21 EP EP21194514.2A patent/EP3937497B1/en active Active
- 2012-03-21 KR KR1020197021680A patent/KR102117085B1/ko active IP Right Grant
- 2012-03-21 HU HUE19207944A patent/HUE056367T2/hu unknown
- 2012-03-21 PT PT127603025T patent/PT2690870T/pt unknown
- 2012-03-21 KR KR1020137024856A patent/KR101892165B1/ko active IP Right Grant
-
2015
- 2015-03-30 US US14/673,029 patent/US9319709B2/en active Active
- 2015-06-24 JP JP2015126914A patent/JP6073979B2/ja active Active
-
2016
- 2016-03-09 US US15/065,048 patent/US9667992B2/en active Active
- 2016-12-29 US US15/393,716 patent/US9936221B2/en active Active
-
2017
- 2017-01-05 JP JP2017000477A patent/JP6334742B2/ja active Active
-
2018
- 2018-02-20 US US15/900,081 patent/US10575012B2/en active Active
- 2018-04-26 JP JP2018084985A patent/JP6608994B2/ja active Active
-
2019
- 2019-10-24 JP JP2019193676A patent/JP6818842B2/ja active Active
-
2020
- 2020-01-13 US US16/740,822 patent/US10999598B2/en active Active
- 2020-12-28 JP JP2020218458A patent/JP7098709B2/ja active Active
-
2022
- 2022-06-29 JP JP2022104835A patent/JP7293464B2/ja active Active
-
2023
- 2023-06-06 JP JP2023092960A patent/JP2023105064A/ja active Pending
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009017262A (ja) * | 2007-07-05 | 2009-01-22 | Sony Corp | データ処理装置、データ処理方法およびデータ処理プログラム、符号化装置、符号化方法および符号化プログラム、ならびに、復号装置、復号方法および復号プログラム |
| CN101816183A (zh) * | 2007-10-04 | 2010-08-25 | 三星电子株式会社 | 使用子像素运动估计对图像进行帧间预测编码/解码的方法和设备 |
| KR20080085823A (ko) * | 2008-09-11 | 2008-09-24 | 엘지전자 주식회사 | 모션 벡터 예측 방법 |
| CN101511019A (zh) * | 2009-03-13 | 2009-08-19 | 广东威创视讯科技股份有限公司 | 一种可变模式运动估计方法及可变模式运动估计装置 |
| CN101827269A (zh) * | 2010-01-15 | 2010-09-08 | 香港应用科技研究院有限公司 | 视频编码方法和装置 |
Also Published As
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN107948657B (zh) | 选择运动矢量预测值的方法和使用其的设备 | |
| US11394976B2 (en) | Inter-prediction method and apparatus in image coding system |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |