CN107911050B - 一种高频注入法检测永磁同步电机转子位置的补偿方法 - Google Patents
一种高频注入法检测永磁同步电机转子位置的补偿方法 Download PDFInfo
- Publication number
- CN107911050B CN107911050B CN201711195542.9A CN201711195542A CN107911050B CN 107911050 B CN107911050 B CN 107911050B CN 201711195542 A CN201711195542 A CN 201711195542A CN 107911050 B CN107911050 B CN 107911050B
- Authority
- CN
- China
- Prior art keywords
- theta
- rotor position
- permanent magnet
- synchronous motor
- magnet synchronous
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000000034 method Methods 0.000 title claims abstract description 77
- 238000002347 injection Methods 0.000 title claims abstract description 70
- 239000007924 injection Substances 0.000 title claims abstract description 70
- 230000001360 synchronised effect Effects 0.000 title claims abstract description 60
- 238000001514 detection method Methods 0.000 claims abstract description 35
- 238000010586 diagram Methods 0.000 claims description 10
- 238000002474 experimental method Methods 0.000 claims description 9
- 230000003068 static effect Effects 0.000 abstract description 5
- 230000000694 effects Effects 0.000 description 7
- 230000000052 comparative effect Effects 0.000 description 4
- 238000005516 engineering process Methods 0.000 description 4
- 238000004364 calculation method Methods 0.000 description 2
- 238000004458 analytical method Methods 0.000 description 1
- 230000010355 oscillation Effects 0.000 description 1
- 238000012827 research and development Methods 0.000 description 1
- 239000000243 solution Substances 0.000 description 1
- 238000011895 specific detection Methods 0.000 description 1
- 238000012360 testing method Methods 0.000 description 1
Images




Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P6/00—Arrangements for controlling synchronous motors or other dynamo-electric motors using electronic commutation dependent on the rotor position; Electronic commutators therefor
- H02P6/14—Electronic commutators
- H02P6/16—Circuit arrangements for detecting position
- H02P6/18—Circuit arrangements for detecting position without separate position detecting elements
- H02P6/183—Circuit arrangements for detecting position without separate position detecting elements using an injected high frequency signal
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P2203/00—Indexing scheme relating to controlling arrangements characterised by the means for detecting the position of the rotor
- H02P2203/11—Determination or estimation of the rotor position or other motor parameters based on the analysis of high-frequency signals
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P2207/00—Indexing scheme relating to controlling arrangements characterised by the type of motor
- H02P2207/05—Synchronous machines, e.g. with permanent magnets or DC excitation
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Control Of Motors That Do Not Use Commutators (AREA)
Abstract
本发明公开了一种高频注入法检测永磁同步电机转子位置的补偿方法,包括如下步骤:S10)、在检测前,预先确定线性插值表θcmp=f(θ0),将该线性插值表θcmp=f(θ0)作为永磁同步电机二次谐波的固有特性;S20)、在检测时,根据所述的线性插值表θcmp=f(θ0)对所述的θ0进行动态开环补偿以消除高频注入法检测时产生的二次谐波,其中,所述θcmp为转子位置补偿角,所述θ0为转子位置估算角;本发明可明显减少高频注入法中存在的二次谐波问题,有效改善了采用高频注入法检测永磁同步电机转子位置的精度,明显提高整个高频注入法检测系统的静态和动态运行性能,同时本发明的补偿方法简单易于控制,不需要增加硬件设施投入,适合进行规模化推广应用。
Description
技术领域
本发明涉及永磁同步电机控制转子位置检测领域,具体涉及了一种高频注入法检测永磁同步电机转子位置的补偿方法。
背景技术
永磁同步电机因其具有效率高、体积小、噪音小等优点,因此被广泛应用于家用电器、电动汽车等领域。永磁同步电机的无传感器控制技术相比传统技术省去了位置传感器,降低了硬件成本,提高了系统可靠性。
在众多无位置传感器检测技术中,高频注入法利用永磁同步电机自带的凸极特性,可有效检测出转子位置,具有不依赖电机反电势、对电机参数不敏感、鲁棒性强的特点,特别适合应用在电机低速运行的场合,已成为永磁同步电机常用的一种无传感器转子位置检测技术,然而由于永磁同步电机由于存在次凸极效应、参数不对称的情况等原因,会在电机内部引起大量谐波,其中二次谐波问题尤为突出,二次谐波问题会导致转子位置估算角的精确性降低,最终导致整个高频注入法检测系统的稳定性较差。
现有技术中通常采用滤波器来解决上述涉及的谐波问题,然而滤波器本身的应用不仅增加了检测系统的硬件成本,而且滤波器由于其自身的工作原理也会带来新的检测延迟问题,也会导致转子位置估算角的精确性降低。
发明内容
有鉴于此,本发明的目的在于提出一种高频注入法检测永磁同步电机转子位置的补偿方法,可明显减少高频注入法中存在的二次谐波问题,有效改善了采用高频注入法检测永磁同步电机转子位置的精度,明显提高整个高频注入法检测系统的静态和动态运行性能,同时本发明的补偿方法简单易于控制,不需要增加硬件设施投入,适合进行规模化推广应用。
在得到本发明技术方案之前,本申请人进行了大量研发分析以及试验检测后惊喜地发现,由于永磁同步电机的次凸极效应与参数不对称等因素产生的产生二次谐波问题属于永磁同步电机的本体固有特性,在永磁同步电机运行过程中基本保持不变。在这一惊喜发现下,本申请人尝试在高频注入法检测永磁同步电机转子位置之前预先确定永磁同步电机二次谐波的固有特性,其二次谐波的固有特性表现为转子位置估算角θ0与转子位置补偿角θcmp的对应关系,然后在永磁同步电机正常运行检测过程中,根据该预先确定的对应关系对高频注入法检测得到的转子位置估算角θ0进行动态开环补偿,发现可以非常明显地避免或减少永磁同步电机的二次谐波问题,取得了本领域技术人员无法预料到的显著突出效果。
本发明采用的技术方案如下:
一种高频注入法检测永磁同步电机转子位置的补偿方法,包括如下步骤:
S10)、在检测前,预先确定线性插值表θcmp=f(θ0),将该线性插值表θcmp=f(θ0)作为永磁同步电机二次谐波的固有特性;
S20)、在检测时,根据所述的线性插值表θcmp=f(θ0)对所述的θ0进行动态开环补偿以消除高频注入法检测时产生的二次谐波,其中,所述θcmp为转子位置补偿角,所述θ0为转子位置估算角。
优选地,在所述的步骤S10)中,通过自标定实验确定线性插值表θcmp=f(θ0)。
优选地,所述自标定实验的步骤如下:
S11)、所述永磁同步电机以恒定频率稳定运行;
S12)、通过高频注入法检测得到转子位置估算角θ0的波形图θ0-t;
S13)、根据所述转子位置估算角θ0的波形图生成初始拟合直线θref0-t;
S14)、基于所述转子位置估算角θ0的波形图θ0-t和初始拟合直线θref0-t,将取t时刻对应的转子位置估算角θ0与初始拟合直线值θref0的最小差值作为最优拟合直线目标,通过搜索确定最优拟合直线θref-t;
S15)、取t时刻对应的转子位置估算角θ0与最优拟合直线值θref的差值作为相应时刻的转子位置补偿角θcmp,以生成线性插值表θcmp=f(θ0)。
优选地,在所述的步骤S20)中,所述的动态开环补偿公式为:θ=θ0-θcmp,其中,θ为开环补偿后的转子位置估算角。
优选地,所述的高频注入法的注入信号是高频脉振电压。
优选地,所述的高频注入法的注入信号是高频脉振电流。
优选地,所述的高频注入法的注入信号频率范围为100-2000Hz。
优选地,在所述的步骤S11)中,所述恒定频率范围为1-10Hz。
本发明的优点:
1、本发明首先发现了永磁同步电机的次凸极效应与参数不对称等因素产生的产生二次谐波问题属于永磁同步电机的本体固有特性,在永磁同步电机运行过程中基本保持不变,重要的是,本发明基于该发现的基础上,预先确定永磁同步电机二次谐波的固有特性,然后在高频注入法检测永磁同步电机转子位置时依据该预先确定的二次谐波的固有特性对高频注入法检测得到的转子位置估算角θ0进行动态开环补偿,该开环补偿方式简单可靠,可以非常明显地避免或减少永磁同步电机一直存在的二次谐波问题,不影响高频注入法检测转子位置估算角θ0的检测估算,进而也不会带来如现有技术中滤波器所带来新的延迟问题,显著且有效地改善了采用高频注入法检测永磁同步电机转子位置的精度,明显提高整个高频注入法检测系统的静态和动态运行性能;
2、在上述第1点的基础上,本发明还特别提出采用自标定实验确定线性插值表θcmp=f(θ0),即确定二次谐波的固有特性,自标定实验的步骤简单有效,无复杂的补偿算法,易于工程实现,不需要增加硬件设施投入,适合进行规模化推广应用。
附图说明
附图1是本发明具体实施方式下高频注入法检测永磁同步电机转子位置的补偿方法的步骤框图;
附图2是图1中步骤S10)中自标定实验的步骤框图;
附图3是图2中经步骤S14)搜索确定最优拟合直线θref-t的示意图;
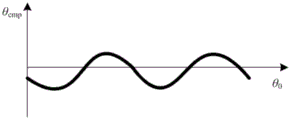
附图4是图2中经步骤S15)生成的线性插值表θcmp=f(θ0);
附图5是无二次谐波补偿的高频注入法检测永磁同步电机得到的转子位置估算角θ0与转子位置实际角θ0’的对比图;
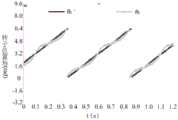
附图6是经本发明具体实施方式采用二次谐波补偿的高频注入法检测永磁同步电机得到的开环补偿后的转子位置估算角θ与转子位置实际角θ’的对比图。
具体实施方式
本发明实施例公开了一种高频注入法检测永磁同步电机转子位置的补偿方法,包括如下步骤:S10)、在检测前,预先确定线性插值表θcmp=f(θ0),将该线性插值表θcmp=f(θ0)作为永磁同步电机二次谐波的固有特性;S20)、在检测时,根据线性插值表θcmp=f(θ0)对θ0进行动态开环补偿以消除高频注入法检测时产生的二次谐波,其中,θcmp为转子位置补偿角,θ0为转子位置估算角。
本发明实施例首先发现了永磁同步电机的次凸极效应与参数不对称等因素产生的产生二次谐波问题属于永磁同步电机的本体固有特性,在永磁同步电机运行过程中基本保持不变,重要的是,本发明实施例基于该发现的基础上,预先确定永磁同步电机二次谐波的固有特性,然后在高频注入法检测永磁同步电机转子位置时依据该预先确定的二次谐波的固有特性对高频注入法检测得到的转子位置估算角θ0进行动态开环补偿,该开环补偿方式简单可靠,可以非常明显地避免或减少永磁同步电机一直存在的二次谐波问题,不影响高频注入法检测转子位置估算角θ0的检测估算,进而也不会带来如现有技术中滤波器所带来新的延迟问题,显著且有效地改善了采用高频注入法检测永磁同步电机转子位置的精度,明显提高整个高频注入法检测系统的静态和动态运行性能。
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明中记载的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
500W/8极内嵌式永磁同步电机平台,请参见图1所示,采用高频注入法检测该内嵌式永磁同步电机转子位置的补偿方法,包括如下步骤:
S10)、在检测前,预先确定线性插值表θcmp=f(θ0),将该线性插值表θcmp=f(θ0)作为永磁同步电机二次谐波的固有特性;优选地,在步骤S10)中,通过自标定实验确定线性插值表θcmp=f(θ0);优选地,请进一步参见图2所示,自标定实验的步骤如下:
S11)、永磁同步电机以恒定频率稳定运行,优选地,恒定频率范围为1-10Hz,具体地,在本实施方式中,恒定频率为4Hz;
S12)、通过高频注入法检测得到转子位置估算角θ0的波形图θ0-t;
S13)、根据转子位置估算角θ0的波形图生成初始拟合直线θref0-t;
S14)、请参见图3所示,基于转子位置估算角θ0的波形图θ0-t和初始拟合直线θref0-t,将取t时刻对应的转子位置估算角θ0与初始拟合直线值θref0的最小差值作为最优拟合直线目标,通过如图3中所示的搜索箭头方式搜索确定最优拟合直线θref-t;
S15)、取t时刻对应的转子位置估算角θ0与最优拟合直线值θref的差值作为相应时刻的转子位置补偿角θcmp,以生成线性插值表θcmp=f(θ0),生成的线性插值表θcmp=f(θ0)请参见图4所示。
S20)、在对正常运行永磁同步电机检测时,永磁同步电机的频率为2Hz,根据线性插值表θcmp=f(θ0)对θ0进行动态开环补偿以消除高频注入法检测时产生的二次谐波,其中,θcmp为转子位置补偿角,θ0为转子位置估算角;优选地,在本实施方式中,动态开环补偿公式为:θ=θ0-θcmp,其中,θ为开环补偿后的转子位置估算角。
优选地,在本实施方式中,高频注入法的注入信号是高频脉振电压,当然地,在本发明其他实施方式中,高频注入法的注入信号也可以是高频脉振电流,本领域技术人员可以在本发明提供技术方案基础上结合公知常识和常规技术选择得到具体实施方案,本发明不具体展开说明。
优选地,在本实施方式中,高频脉振电压频率范围为100-2000Hz;具体地,在本实施方式中,高频脉振电压频率为300Hz,高频脉振电压为15V。
需要说明的是,本发明实施例采用高频注入法估算永磁同步电机转子位置角的技术方案可以采用现有技术中的任意一种;具体地,在本实施方式中,高频注入法估算永磁同步电机转子位置角的计算方法采用:在估算转子位置角处注入一定幅值的高频脉振电压信号;接下来,检测、估算转子位置角正交轴线处的高频电流分量的幅值,并将其作为转子位置角的估算误差;最后,根据转子位置角的估算误差并通过PI调节器估算转子位置角,从而得到本发明实施方式中的转子位置估算角θ0;显然,在本发明其他实施方式中,本领域技术人员可以不付出创造性劳动采用其他计算方法步骤具体实施高频注入法估算永磁同步电机转子位置角,这些实施方式同样可以获得与本发明上述实施方式在消除二次谐波方面上显著的技术效果,本发明不做一一举例说明。
本发明实施例为了验证技术效果,还将未进行二次谐波补偿,直接采用高频注入法检测该内嵌式永磁同步电机转子位置的对比实施例,具体检测技术方案同本发明上述实施方案。经对比实施后发现:本采用二次谐波补偿的高频注入法检测实施例技术方案相对于未采用二次谐波补偿的高频注入法检测比较例技术方案取得了显著的技术效果:
请参见如图5所示的对比实施例得到的无二次谐波补偿的高频注入法检测永磁同步电机得到的转子位置估算角θ0与转子位置实际角θ0’的对比图,从图5中可以看出,转子位置估算角θ0有明显的二次谐波分量,其与转子位置实际角θ0’的最大误差约达到20°;请结合参见图6所示的经本发明具体实施方式采用二次谐波补偿的高频注入法检测永磁同步电机得到的开环补偿后的转子位置估算角θ与转子位置实际角θ’的对比图,从图6中可以看出,经本发明二次谐波补偿后,开环补偿后的转子位置估算角θ的二次谐波大大降低,其与转子位置实际角θ’的误差被控制在3°以内,由此可见,本发明实施方案可明显减少高频注入法中存在的二次谐波问题,有效改善了采用高频注入法检测永磁同步电机转子位置的精度,明显提高整个高频注入法检测系统的静态和动态运行性能,同时本发明实施方案的补偿方法简单易于控制,不需要增加硬件设施投入,适合进行规模化推广应用;而且本发明实施方式的开环补偿方式简单可靠,不影响高频注入法检测转子位置估算角θ0的检测估算,进而也不会带来如现有技术中滤波器所带来新的延迟问题。
本发明对比实施例中的的转子位置实际角θ0’和本发明实施方式中的转子位置实际角θ’均是采用现有技术中的光电编码器检测得到的。
对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
Claims (5)
1.一种高频注入法检测永磁同步电机转子位置的补偿方法,其特征在于,包括如下步骤:
S10)、在检测前,预先确定线性插值表θcmp=f(θ0),将该线性插值表θcmp=f(θ0)作为永磁同步电机二次谐波的固有特性;
S20)、在检测时,根据所述的线性插值表θcmp=f(θ0)对所述的θ0进行动态开环补偿以消除高频注入法检测时产生的二次谐波,其中,所述θcmp为转子位置补偿角,所述θ0为转子位置估算角;
在所述的步骤S10)中,通过自标定实验确定线性插值表θcmp=f(θ0);所述自标定实验的步骤如下:
S11)、所述永磁同步电机以恒定频率稳定运行;
S12)、通过高频注入法检测得到转子位置估算角θ0的波形图θ0-t;
S13)、根据所述转子位置估算角θ0的波形图生成初始拟合直线θref0-t;
S14)、基于所述转子位置估算角θ0的波形图θ0-t和初始拟合直线θref0-t,将取t时刻对应的转子位置估算角θ0与初始拟合直线值θref0的最小差值作为最优拟合直线目标,通过搜索确定最优拟合直线θref-t;
S15)、取t时刻对应的转子位置估算角θ0与最优拟合直线值θref的差值作为相应时刻的转子位置补偿角θcmp,以生成线性插值表θcmp=f(θ0);
在所述的步骤S20)中,所述的动态开环补偿公式为:θ=θ0-θcmp,其中,
θ为开环补偿后的转子位置估算角。
2.如权利要求1所述的高频注入法检测永磁同步电机转子位置的补偿方法,其特征在于,所述的高频注入法的注入信号是高频脉振电压。
3.如权利要求1所述的高频注入法检测永磁同步电机转子位置的补偿方法,其特征在于,所述的高频注入法的注入信号是高频脉振电流。
4.如权利要求1所述的高频注入法检测永磁同步电机转子位置的补偿方法,其特征在于,所述的高频注入法的注入信号频率范围为100-2000Hz。
5.如权利要求1所述的高频注入法检测永磁同步电机转子位置的补偿方法,其特征在于,在所述的步骤S11)中,所述恒定频率范围为1-10Hz。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201711195542.9A CN107911050B (zh) | 2017-11-24 | 2017-11-24 | 一种高频注入法检测永磁同步电机转子位置的补偿方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201711195542.9A CN107911050B (zh) | 2017-11-24 | 2017-11-24 | 一种高频注入法检测永磁同步电机转子位置的补偿方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN107911050A CN107911050A (zh) | 2018-04-13 |
| CN107911050B true CN107911050B (zh) | 2020-03-24 |
Family
ID=61848403
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201711195542.9A Active CN107911050B (zh) | 2017-11-24 | 2017-11-24 | 一种高频注入法检测永磁同步电机转子位置的补偿方法 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN107911050B (zh) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN113261178B (zh) * | 2018-12-24 | 2024-10-01 | 鲲腾泰克(成都)科技有限公司 | 使用谐波注入的多相电动机/发电机系统 |
| CN109861611B (zh) * | 2019-02-22 | 2021-04-06 | 中国第一汽车股份有限公司 | 永磁同步电机位置传感器误差补偿系统和方法 |
| CN117220549B (zh) * | 2023-11-09 | 2024-01-26 | 徐州飞达电子科技有限公司 | 一种基于高频注入的永磁电机位置检测方法 |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN101505130B (zh) * | 2009-03-17 | 2011-05-04 | 国电南端科技股份有限公司 | 永磁同步发电机转子位置估算及校正方法 |
| CN103840725B (zh) * | 2012-11-26 | 2016-05-18 | 台达电子工业股份有限公司 | 永磁同步电机转子位置偏差测量装置及方法 |
| CN104716884B (zh) * | 2013-12-12 | 2017-10-31 | 西门子公司 | 用于校正电机的转子位置的装置及方法 |
| CN104660140A (zh) * | 2015-01-16 | 2015-05-27 | 南京航空航天大学 | 基于高频电流信号注入的永磁同步电机初始位置检测方法 |
| CN106655942B (zh) * | 2017-03-01 | 2019-08-02 | 合肥工业大学 | 永磁同步电机无位置传感器控制方法 |
| CN107241042B (zh) * | 2017-06-12 | 2020-07-10 | 南京航空航天大学 | 基于并联epll的脉振高频信号注入法信号提取系统及策略 |
-
2017
- 2017-11-24 CN CN201711195542.9A patent/CN107911050B/zh active Active
Also Published As
| Publication number | Publication date |
|---|---|
| CN107911050A (zh) | 2018-04-13 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN105450127B (zh) | 基于高频信号注入的永磁同步电机转子位置检测方法 | |
| CN102843091B (zh) | 一种永磁同步电机转子初始位置的判断方法 | |
| CN104158462B (zh) | 一种无位置传感器的永磁同步电机初始位置检测方法 | |
| CN109981001B (zh) | 一种低噪音的永磁同步电机转子初始位置检测方法 | |
| CN104660140A (zh) | 基于高频电流信号注入的永磁同步电机初始位置检测方法 | |
| CN109067283A (zh) | 一种永磁同步电机转子初始位置辨识系统及方法 | |
| CN107911050B (zh) | 一种高频注入法检测永磁同步电机转子位置的补偿方法 | |
| CN105245151B (zh) | 表贴式永磁同步电机转子位置的检测方法 | |
| CN103532465A (zh) | 基于增量式模型参考自适应的永磁同步电机电感辨识算法 | |
| CN106655952A (zh) | 一种检测永磁同步电机转子初始位置的电流包络线法 | |
| CN103701395B (zh) | 一种基于正反序列谐波注入的电机转子初位估计方法 | |
| CN104022710A (zh) | 一种检测表贴式永磁同步电机转子初始位置的方法 | |
| CN107947649B (zh) | 电机转子位置修正方法、装置及设备、存储介质 | |
| CN103986394A (zh) | 一种用于表贴式永磁同步电机转子初始位置检测的方法 | |
| CN110880897A (zh) | 电机的控制方法及装置、驱动装置 | |
| CN107872174B (zh) | 一种高频注入法检测永磁同步电机转子位置的补偿方法 | |
| CN112436762A (zh) | 一种永磁同步电机转子初始位置检测方法 | |
| CN113904604B (zh) | 三级式同步电机转子位置估计的直接解调计算方法 | |
| CN113691169B (zh) | 电机转子位置检测方法、装置以及电机控制器 | |
| CN112787559B (zh) | 一种永磁电机转子初始位置检测方法 | |
| CN111817636A (zh) | 一种频率连续变化的高频正弦电压注入的永磁同步电机位置估计方法 | |
| Ji et al. | Sensorless control for PMSM with novel back EMF observer based on quasi-PR controller | |
| CN110868112A (zh) | 一种k接近优化估计的电机转子初始位置检测方法和装置 | |
| CN107769655B (zh) | 永磁同步电机转速估算方法、装置、计算设备及存储介质 | |
| CN118573063A (zh) | 基于新型锁相环的永磁同步电机无位置传感器控制方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |