CN107690958B - 一种触碰式水果采摘臂 - Google Patents
一种触碰式水果采摘臂 Download PDFInfo
- Publication number
- CN107690958B CN107690958B CN201710885869.2A CN201710885869A CN107690958B CN 107690958 B CN107690958 B CN 107690958B CN 201710885869 A CN201710885869 A CN 201710885869A CN 107690958 B CN107690958 B CN 107690958B
- Authority
- CN
- China
- Prior art keywords
- rod
- plate
- limiting
- control
- base
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images






Classifications
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01D—HARVESTING; MOWING
- A01D46/00—Picking of fruits, vegetables, hops, or the like; Devices for shaking trees or shrubs
- A01D46/24—Devices for picking apples or like fruit
- A01D46/247—Manually operated fruit-picking tools
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01D—HARVESTING; MOWING
- A01D46/00—Picking of fruits, vegetables, hops, or the like; Devices for shaking trees or shrubs
- A01D46/22—Baskets or bags attachable to the picker
Landscapes
- Life Sciences & Earth Sciences (AREA)
- Environmental Sciences (AREA)
- Harvesting Machines For Specific Crops (AREA)
Abstract
本发明提供一种触碰式水果采摘臂,包括夹紧装置、伸缩结构和控制平台,所述夹紧装置包括第一板、第二板和底座,可以对果实进行夹紧;所述伸缩结构相互铰接的连杆机构,能够实现采摘臂的升高或降低;所述控制平台包括基座、第一限位板和第二限位板,第一限位板和第二限位板连接在基座上面,第一限位板和第二限位板之间连接第一限位杆,第一限位杆上套装手柄,手柄与第三短支杆的两端铰接,基座的侧面设有定位环,控制柄插在定位环内。该采摘臂可以很好的对水果进行采摘,尤其针对比较高的果树的果实采摘,不需要采摘人员进行爬树,降低危险性,提高采摘效率。
Description
技术领域
本发明属于农业设备领域,特别涉及一种触碰式水果采摘臂。
背景技术
现在很多地区在水果的采摘上依然主要靠人工,但人工采摘效率低。而且针对高大果树上水果的采摘,比如苹果、梨的采摘,传统的水果采摘工具不仅效率低,而且需要借助梯子或爬树进行采摘,劳动量大,而且存在危险。现有的辅助操作工具不能很好的与自动化技术结合,很难实现智能采摘。
发明内容
本发明所要解决的技术问题是提供一种触碰式水果采摘臂,可以很好的对水果进行采摘,尤其针对比较高的果树的果实采摘,不需要采摘人员进行爬树,降低危险性,提高采摘效率。
为解决上述技术问题,本发明所采用的技术方案是: 一种触碰式水果采摘臂,包括夹紧装置、伸缩结构和控制平台,所述夹紧装置包括第一板、第二板和底座,所述第一板包括控制板、后板和转动部,控制板和后板分别与转动部连接,所述第二板顶部设有凹口,待采摘水果可以穿过凹口,所述底座包括第一杆和第二杆,第一杆和第二杆通过第三杆连接,第一杆连接挡板,第二杆上设置限位环,转动部套在第一杆上使后板和控制板可以绕第一杆转动,第二板上端顶在后板上,下端穿过限位环顶在控制板上,所述挡板与控制板之间设置复位机构,所述复位机构为弹簧或弹簧片;
所述伸缩结构包括第一多段杆和第二多段杆,第一多段杆和第二多段杆均由第一支杆、第二支杆和第三支杆铰接组成,第一多段杆的第一支杆的顶端铰接第一连接杆,第一连接杆的端部以及第一多段杆的第二支杆中部铰接第一短支杆,第一短支杆与第二短支杆、第三短支杆和第四短支杆首尾相互铰接组成平行四边形框架,第一多段杆的第三支杆的端部与第二连接杆铰接,第二连接杆的另一端与第二短支杆的中部铰接,第一多段杆和第二多段杆的第三支杆端部铰接控制柄;
夹紧装置的底座与第一多段杆和第二多段杆的第一支杆连接,收集装置设置在底座下方;
所述控制平台包括基座、第一限位板和第二限位板,第一限位板和第二限位板连接在基座上面,第一限位板和第二限位板之间连接第一限位杆,第一限位杆上套装手柄,手柄与第三短支杆的两端铰接,基座的侧面设有定位环,控制柄插在定位环内。
优选的方案中,所述第二板包括一体连接的第一弧形段、第二弧形段和第三弧形段,第一弧形段顶在后板上,第二弧形段为圆弧,第二弧形段与限位环配合,第三弧形段向后板方向弯曲,顶在控制板上。
优选的方案中,所述后板上端设置槽口。
进一步的方案中,所述槽口为“V”形槽,槽口边缘锋利。
进一步的方案中,所述槽口位置设置支架,辊筒可转动的套装在支架上。
优选的方案中,所述控制平台还包括第三限位板和第四限位板,第三限位板和第四限位板之间连接第二限位杆,第二限位杆上套装有拨片,第四限位板上设置第一定位孔,基座上正对第一定位孔下方位置设有第二定位孔,控制柄下端设置连接孔,控制绳与连接孔连接,控制绳从基座下方依次穿过第二定位孔和第一定位孔后捆扎在拨片上。
进一步的方案中,所述基座下端与控制绳接触部位设置卡槽,控制绳限位在卡槽内。
进一步的方案中,所述拨片与第四限位板之间设置第二弹簧。
优选的方案中,所述手柄与第二限位板之间设置第一弹簧。
优选的方案中,所述第三杆为环形,数量为两个,分别与第一杆和第二杆的两端连接。
本发明提供的一种触碰式水果采摘臂,通过采用以上结构具有以下有益效果:
1、通过伸缩机构可以实现整个采摘臂的上下和左右移动,相较于一般采摘辅助装置只能上下移动,活动更加灵活。
2、设置的夹紧装置通过伸缩机构的移动以及从凹口进入的水果压迫作用,实现夹紧装置中第一板和第二板之间的空间的大小变换,从而实现对水果的夹紧以及采摘。
3、设置的第三限位板、第四限位板、拨片以及控制绳,使只需要左右拨动拨片即可实现控制柄的上下移动。
4、第二板包括一体连接的第一弧形段、第二弧形段和第三弧形段,第二弧形段为圆弧,可以使第二板绕限位板转动同时上下移动。
5、后板上端设置槽口可以将果柄卡在槽口位置,更容易实现第一板的转动,同时槽口边缘锋利,可以将果柄切断。
6、第一弹簧和第二弹簧使整个伸缩机构保持在平衡状态,当伸缩机构升高或降低操作完成后,第一弹簧和第二弹簧使伸缩机构恢复到平衡状态,更加省力。
附图说明
下面结合附图和实施例对本发明作进一步说明:
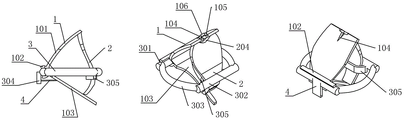
图1为本发明的整体结构示意图。
图2为本发明的夹紧装置的结构示意图。
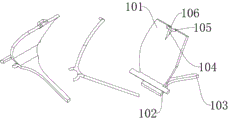
图3为第一板的结构示意图。
图4为第二板的结构示意图。
图5为夹紧装置的未夹紧时的结构示意图。
图6为夹紧装置的夹紧时的结构示意图。
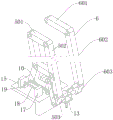
图7为夹紧装置与伸缩机构的连接示意图。
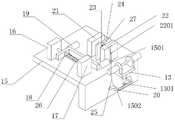
图8为控制平台的结构示意图。
图9为控制平台与伸缩机构的连接示意图。
图10为本发明具体使用时的结构示意图。
图中:第一板1,第二板2,底座3,复位机构4,第一多段杆5,第二多段杆6,第一连接杆7,第一短支杆8,第二短支杆9,第三短支杆10,第四短支杆11,第二连接杆12,控制柄13,收集装置14,基座15,第一限位板16,第二限位板17,第一限位杆18,手柄19,定位环20,第三限位板21,第四限位板22,第二限位杆23,拨片24,控制绳25,第一弹簧26,第二弹簧27,后板101,转动部102,控制板103,槽口104,支架105,辊筒106,第一弧形段201,第二弧形段202,第三弧形段203,凹口204,第一杆301,第二杆302,第三杆303,挡板304,限位环305,第一支杆501、601,第二支杆502、602,第三支杆503、603,连接孔1301,第二定位孔1501,卡槽1502,第一定位孔2201。
具体实施方式
如图1~4中,一种触碰式水果采摘臂,包括夹紧装置、伸缩结构和控制平台,所述夹紧装置包括第一板1、第二板2和底座3,所述第一板1包括控制板103、后板101和转动部102,控制板103和后板101分别与转动部102连接,所述第二板2顶部设有凹口204,待采摘水果可以穿过凹口204,所述底座3包括第一杆301和第二杆302,第一杆301和第二杆302通过第三杆303连接,第一杆301连接挡板304,第二杆302上设置限位环305,转动部102套在第一杆301上使后板101和控制板103可以绕第一杆301转动,第二板2上端顶在后板101上,下端穿过限位环305顶在控制板103上,所述挡板304与控制板103之间设置复位机构4,所述复位机构4为弹簧或弹簧片;
如图3所示,所述后板101主体中间宽,上下两端稍窄;转动部102为月牙状的牙口,所述牙口可转动的卡在第一杆301上。
如图7中,所述伸缩结构包括第一多段杆5和第二多段杆6,第一多段杆5和第二多段杆6均由第一支杆501、601,第二支杆502、602和第三支杆503、603铰接组成,第一多段杆5的第一支杆501的顶端铰接第一连接杆7,第一连接杆7的端部以及第一多段杆5的第二支杆502中部铰接第一短支杆8,第一短支杆8与第二短支杆9、第三短支杆10和第四短支杆11首尾相互铰接组成平行四边形框架,第一多段杆5的第三支杆503的端部与第二连接杆12铰接,第二连接杆12的另一端与第二短支杆9的中部铰接,第一多段杆5和第二多段杆6的第三支杆503、603端部铰接控制柄13;
夹紧装置的底座3与第一多段杆5和第二多段杆6的第一支杆501、601连接,收集装置14设置在底座3下方;
如图8和9中,所述控制平台包括基座15、第一限位板16和第二限位板17,第一限位板16和第二限位板17连接在基座15上面,第一限位板16和第二限位板17之间连接第一限位杆18,第一限位杆18上套装手柄19,手柄19与第三短支杆10的两端铰接,基座15的侧面设有定位环20,控制柄13插在定位环20内。
所述收集装置14可以设置为微弹布套绑在第三杆303上,且经第一连接杆7和第二支杆502、602形成通道使果实滚到布套底端方便收集。收集装置14也可直接将果实导向到地面上。
如图4所示,所述第二板2包括一体连接的第一弧形段201、第二弧形段202和第三弧形段203,第一弧形段201顶在后板101上,第二弧形段202为圆弧,第二弧形段202与限位环305配合,第三弧形段203向后板101方向弯曲,顶在控制板103上,第二板2总体呈“丿”形。
第三弧形段203的弯曲使其总是垂直顶在控制板103上,用于避免工作时第二板2下端打滑;第二弧形段202为圆弧,在夹紧水果的最后阶段能扣在限位环305上,使第一、第二板上部夹角陡然减小,且第二板2较难继续上滑,从而抓紧水果。
当第一板1绕第一杆301逆时针转动时,控制板103向上顶第三弧形段203,使第二弧形段202沿限位环305滑动,同时整个第二板2向上移动,使第二板2上端顶在后板101上,使后板101和第二板2之间的夹角变小,对水果形成夹持力。
所述后板101上端设置槽口104。可以将果柄卡在槽口104位置,更容易实现第一板1的转动。
所述槽口104为“V”形槽,槽口104边缘锋利。可以将果柄切断。
所述槽口104位置设置支架105,辊筒106可转动的套装在支架105上。辊筒106用于消除果树枝叶对装置工作的干扰,辊筒106可绕支架105自由转动,由于向下生长的枝干和叶片也能进入夹紧装置内,设置的辊筒106在向枝条末端运动时可将枝干和叶片顶起,并导向其在水平面上脱离夹紧装置,而果实由于重量更大,辊筒工作时其果柄弯折,使果柄在锋利的槽口104上摆动,加快切割。
如图7中,所述控制平台还包括第三限位板21和第四限位板22,第三限位板21和第四限位板22之间连接第二限位杆23,第二限位杆23上套装有拨片24,第四限位板22上设置第一定位孔2201,基座15上正对第一定位孔2201下方位置设有第二定位孔1501,控制柄13下端设置连接孔1301,控制绳25与连接孔1301连接,控制绳25从基座15下方依次穿过第二定位孔1501和第一定位孔2201后捆扎在拨片24上。
装置未工作时处于平衡状态,通过控制绳25将控制柄13的上下移动转换为拨片24的左右移动,只需要捏紧拨片24与第四限位板22或释放拨片24,即可实现伸缩机构的上下移动。
所述基座15下端与控制绳25接触部位设置卡槽1502,控制绳25限位在卡槽1502内。卡槽1502可以防止控制绳25位置发生偏移。
所述手柄19与第二限位板17之间设置第一弹簧26。
所述拨片24与第四限位板22之间设置第二弹簧27。
所述第三杆303为环形,数量为两个,分别与第一杆301和第二杆302的两端连接。
具体使用时,可以将该采摘臂固定在三角架上,如图1所示,也可以将该采摘臂固定在环形轨道上,如图10所示,通过移动三角架或采摘臂在圆形轨道上的位置来实现采摘臂的位置移动。
工作时利用三脚架将整个装置置于果树下,控制平台固定在三脚架上,因第一限位杆18上套装手柄19,手柄19与第三短支杆10的两端铰接,控制柄13插在定位环20内,从而可以沿第一限位杆18左右拉动手柄19,也可以上下拉动控制柄13。
在采摘臂未工作时,第一弹簧26和第二弹簧27的作用下,使伸缩机构处于平衡状态,此时夹紧装置处于未夹紧状态,如图5所示。当需要采摘果树上的水果时,向左拨动拨片24,控制绳25拉动控制柄13向下运动,因为控制柄13限制在定位环20内,伸缩结构上端带动夹紧装置向右摆动,伸缩机构高度上升同时向右运动,夹紧装置由果树的树干向枝叶方向,即由内向外运动,因果实向下生长而枝叶向外、向上生长的特点,运行至果实所在位置时,果实从第二板2顶部凹口204进入第一板1和第二板2之间,继续向左拨动拨片24,伸缩机构上端继续向右摆动,水果与后板101贴合,果柄卡在槽口104的位置,水果迫使第一板1沿第一杆301逆时针转动,控制板103将第二板2向上顶,第二板2沿限位环305滑动,第一板1和第二板2将水果夹在中间,如图6所示。在伸缩机构的继续运动中将水果果柄与树枝分离,水果掉落沿布套进入收集装置,复位机构4使第一板1和第二板2恢复原位,松开拨片24,伸缩机构在第二弹簧27以及重力的作用下回复到平衡状态;进行第二次采摘时,调整采摘臂的角度重复上述动作。可以将该操作臂安装在如图8的环形轨道上方便角度调整,进一步也可以通过自动化相关方法以电控方式操作。
上述的实施例仅为本发明的优选技术方案,而不应视为对于本发明的限制,本发明的保护范围应以权利要求记载的技术方案,包括权利要求记载的技术方案中技术特征的等同替换方案为保护范围。即在此范围内的等同替换改进,也在本发明的保护范围之内。
Claims (8)
1.一种触碰式水果采摘臂,其特征在于:包括夹紧装置、伸缩结构和控制平台,所述夹紧装置包括第一板(1)、第二板(2)和底座(3),所述第一板(1)包括控制板(103)、后板(101)和转动部(102),后板(101)上端设置槽口(104),槽口(104)为“V”形槽,槽口(104)边缘锋利,控制板(103)和后板(101)分别与转动部(102)连接,所述第二板(2)顶部设有凹口(204),待采摘水果可以穿过凹口(204),所述底座(3)包括第一杆(301)和第二杆(302),第一杆(301)和第二杆(302)通过第三杆(303)连接,第一杆(301)连接挡板(304),第二杆(302)上设置限位环(305),转动部(102)套在第一杆(301)上使后板(101)和控制板(103)可以绕第一杆(301)转动,第二板(2)上端顶在后板(101)上,下端穿过限位环(305)顶在控制板(103)上,所述挡板(304)与控制板(103)之间设置复位机构(4),所述复位机构(4)为弹簧或弹簧片;
所述伸缩结构包括第一多段杆(5)和第二多段杆(6),第一多段杆(5)和第二多段杆(6)均由第一支杆(501;601)、第二支杆(502;602)和第三支杆(503;603)铰接组成,第一多段杆(5)的第一支杆(501)的顶端铰接第一连接杆(7),第一连接杆(7)的端部以及第一多段杆(5)的第二支杆(502)中部铰接第一短支杆(8),第一短支杆(8)与第二短支杆(9)、第三短支杆(10)和第四短支杆(11)首尾相互铰接组成平行四边形框架,第一多段杆(5)的第三支杆(503)的端部与第二连接杆(12)铰接,第二连接杆(12)的另一端与第二短支杆(9)的中部铰接,第一多段杆(5)和第二多段杆(6)的第三支杆(503;603)端部铰接控制柄(13);
夹紧装置的底座(3)与第一多段杆(5)和第二多段杆(6)的第一支杆(501;601)连接,收集装置(14)设置在底座(3)下方;
所述控制平台包括基座(15)、第一限位板(16)和第二限位板(17),第一限位板(16)和第二限位板(17)连接在基座(15)上面,第一限位板(16)和第二限位板(17)之间连接第一限位杆(18),第一限位杆(18)上套装手柄(19),手柄(19)与第三短支杆(10)的两端铰接,基座(15)的侧面设有定位环(20),控制柄(13)插在定位环(20)内。
2.根据权利要求1所述的一种触碰式水果采摘臂,其特征在于:所述第二板(2)包括一体连接的第一弧形段(201)、第二弧形段(202)和第三弧形段(203),第一弧形段(201)顶在后板(101)上,第二弧形段(202)为圆弧,第二弧形段(202)与限位环(305)配合,第三弧形段(203)向后板(101)方向弯曲,顶在控制板(103)上。
3.根据权利要求1所述的一种触碰式水果采摘臂,其特征在于:所述槽口(104)位置设置支架(105),辊筒(106)可转动的套装在支架(105)上。
4.根据权利要求1所述的一种触碰式水果采摘臂,其特征在于:所述控制平台还包括第三限位板(21)和第四限位板(22),第三限位板(21)和第四限位板(22)之间连接第二限位杆(23),第二限位杆(23)上套装有拨片(24),第四限位板(22)上设置第一定位孔(2201),基座(15)上正对第一定位孔(2201)下方位置设有第二定位孔(1501),控制柄(13)下端设置连接孔(1301),控制绳(25)与连接孔(1301)连接,控制绳(25)从基座(15)下方依次穿过第二定位孔(1501)和第一定位孔(2201)后捆扎在拨片(24)上。
5.根据权利要求4所述的一种触碰式水果采摘臂,其特征在于:所述基座(15)下端与控制绳(25)接触部位设置卡槽(1502),控制绳(25)限位在卡槽(1502)内。
6.根据权利要求1所述的一种触碰式水果采摘臂,其特征在于:所述手柄(19)与第二限位板(17)之间设置第一弹簧(26)。
7.根据权利要求5所述的一种触碰式水果采摘臂,其特征在于:所述拨片(24)与第四限位板(22)之间设置第二弹簧(27)。
8.根据权利要求1所述的一种触碰式水果采摘臂,其特征在于:所述第三杆(303)为环形,数量为两个,分别与第一杆(301)和第二杆(302)的两端连接。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201710885869.2A CN107690958B (zh) | 2017-09-27 | 2017-09-27 | 一种触碰式水果采摘臂 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201710885869.2A CN107690958B (zh) | 2017-09-27 | 2017-09-27 | 一种触碰式水果采摘臂 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN107690958A CN107690958A (zh) | 2018-02-16 |
| CN107690958B true CN107690958B (zh) | 2020-05-26 |
Family
ID=61175528
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201710885869.2A Active CN107690958B (zh) | 2017-09-27 | 2017-09-27 | 一种触碰式水果采摘臂 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN107690958B (zh) |
Families Citing this family (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN108476719A (zh) * | 2018-06-04 | 2018-09-04 | 贵州民族大学 | 一种菠萝采摘辅助装置 |
| CN108702942A (zh) * | 2018-07-26 | 2018-10-26 | 浙江理工大学 | 一种面向林果采收的自适应偏心振动装置 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5724799A (en) * | 1996-01-17 | 1998-03-10 | Hsia; Chih-Yu | Fruit picker |
| CN203380891U (zh) * | 2013-08-07 | 2014-01-08 | 西北农林科技大学 | 一种猕猴桃果实采摘末端执行器 |
| CN203788729U (zh) * | 2014-04-17 | 2014-08-27 | 西安工业大学 | 一种摘果捡果机械手 |
| CN105052398A (zh) * | 2015-08-24 | 2015-11-18 | 重庆市龙佰绪生态农业开发有限公司 | 葡萄采摘设备 |
| CN105940863A (zh) * | 2016-06-23 | 2016-09-21 | 海南大学 | 一种太阳能芒果采摘机 |
| CN206237823U (zh) * | 2016-11-21 | 2017-06-13 | 镇江市胜得机械制造有限责任公司 | 一种用于自动采果机的采果机构 |
| CN107018759A (zh) * | 2017-06-08 | 2017-08-08 | 宝鸡文理学院 | 基于单片机控制的自动夹持剪蒂型苹果采摘器 |
-
2017
- 2017-09-27 CN CN201710885869.2A patent/CN107690958B/zh active Active
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5724799A (en) * | 1996-01-17 | 1998-03-10 | Hsia; Chih-Yu | Fruit picker |
| CN203380891U (zh) * | 2013-08-07 | 2014-01-08 | 西北农林科技大学 | 一种猕猴桃果实采摘末端执行器 |
| CN203788729U (zh) * | 2014-04-17 | 2014-08-27 | 西安工业大学 | 一种摘果捡果机械手 |
| CN105052398A (zh) * | 2015-08-24 | 2015-11-18 | 重庆市龙佰绪生态农业开发有限公司 | 葡萄采摘设备 |
| CN105940863A (zh) * | 2016-06-23 | 2016-09-21 | 海南大学 | 一种太阳能芒果采摘机 |
| CN206237823U (zh) * | 2016-11-21 | 2017-06-13 | 镇江市胜得机械制造有限责任公司 | 一种用于自动采果机的采果机构 |
| CN107018759A (zh) * | 2017-06-08 | 2017-08-08 | 宝鸡文理学院 | 基于单片机控制的自动夹持剪蒂型苹果采摘器 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN107690958A (zh) | 2018-02-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN100401872C (zh) | 一种柔性接果采摘器 | |
| CN204317047U (zh) | 一种省力摘果装置 | |
| CN201036271Y (zh) | 高枝瓜果采摘器 | |
| CN107690958B (zh) | 一种触碰式水果采摘臂 | |
| CN203575113U (zh) | 便携式山楂采摘器 | |
| CN206078122U (zh) | 一种罗汉果采摘装置 | |
| CN109005911B (zh) | 一种便携式高空串果高适应性采摘装置 | |
| CN115024086B (zh) | 一种菠萝采摘机械手 | |
| CN218789171U (zh) | 一种采摘树上果实的工具 | |
| CN208509636U (zh) | 一种水果采摘器 | |
| CN108419523B (zh) | 一种便于传递果实的番木瓜采摘装置 | |
| CN110896733A (zh) | 一种基于图像识别的苹果采摘机器人 | |
| CN215454057U (zh) | 一种用于柑橘种植用的柑橘采摘装置 | |
| JP3206376U (ja) | 果樹栽培棚の押上げ装置 | |
| CN111133889A (zh) | 油茶籽采摘耙 | |
| CN211407004U (zh) | 一种百香果种植用藤条限位机构 | |
| CN110521382B (zh) | 榨菜收割机 | |
| CN208624135U (zh) | 一种新型苹果采摘装置 | |
| CN209330630U (zh) | 手持式水果采摘装置 | |
| CN208891235U (zh) | 一种薄壳山核桃摘取装置 | |
| CN208462405U (zh) | 方便水果采摘装置 | |
| CN208657363U (zh) | 一种水果采摘装置 | |
| CN111955162A (zh) | 一种果农采摘用具有清障功能的升降机 | |
| CN111802111A (zh) | 一种安全高效的园林修剪装置 | |
| CN215774342U (zh) | 用于荔枝种植的采摘装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |