CN107219864B - 一种伺服/手控混合式三自由度轻小型无人机遥感云台系统 - Google Patents
一种伺服/手控混合式三自由度轻小型无人机遥感云台系统 Download PDFInfo
- Publication number
- CN107219864B CN107219864B CN201710573377.XA CN201710573377A CN107219864B CN 107219864 B CN107219864 B CN 107219864B CN 201710573377 A CN201710573377 A CN 201710573377A CN 107219864 B CN107219864 B CN 107219864B
- Authority
- CN
- China
- Prior art keywords
- frame
- pitching
- azimuth
- roll
- axis
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images












Classifications
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D3/00—Control of position or direction
- G05D3/12—Control of position or direction using feedback
Abstract
本发明公开了一种伺服/手控混合式三自由度轻小型无人机遥感云台系统,具有伺服稳定和手控两种工作模式,包括结构系统、动力系统及控制系统;结构系统的基座通过减振器与飞机相连,隔离飞机线振动;方位框架由基座支承,实现±130°内回转;横滚框架由方位框架支承,实现±30°回转;俯仰框架由横滚框架支承,实现‑90°至30°回转。控制系统根据姿态参考系统提供的框架角位置与角速率信息,产生指令,通过动力系统对姿态误差和速率扰动进行补偿,实现成像载荷视轴稳定和对目标实时跟踪;当跟踪角度较大时,可通过手动遥控操作实现大角度快速跟踪;本系统具有体积小、重量轻、响应快、跟踪范围大等特点,适用于轻小型无人机遥感、目标跟踪、监测等系统。
Description
技术领域
本发明属于航空飞行器设计技术领域,涉及一种伺服/手控混合式三自由度轻小型无人机遥感云台系统,适用于轻小型航空摄影、目标跟踪监测等遥感系统。
背景技术
无论是在军用领域还是民用领域,轻小型无人机都有着广阔的应用和发展前景。其中具有广泛应用的轻小型无人机遥感系统需要搭载成像载荷,而成像载荷如果直接安装在飞行载体上会受到气流扰动、机体振动以及其他一些未知扰动因素的影响,造成成像质量退化。解决的方法是将成像载荷通过云台安装在飞行载体上,通过云台隔离各种扰动,保持视轴稳定。此外,云台还能为摄影系统提供两个或者三个转动自由度,实现视轴的大角度快速跟踪。
三自由度轻小型无人机遥感云台可以有效跟踪目标和稳定成像载荷,是一种广泛使用的航摄成像平台。云台的俯仰、横滚和方位三个框架两两相互正交,将成像载荷置于云台最内的俯仰框架上,通过陀螺敏感成像载荷相对惯性空间的角运动,然后经稳定回路驱动框架力矩电机,克服外界干扰力矩,达到稳定视轴的目的。典型的国外产品主要有:以色列CONTROP精密技术公司研制的ESP-600C型无人机载光电侦查平台采用两轴平台,其方位转动范围360°×N、俯仰+10°~-10°、最大角速度50°/s、最大角加速度-50°/s2,其稳定精度达到15urad。MSSP-3型海事观察平台主要用于海事巡逻飞机和巡逻船,采用四框架陀螺稳定系统,带有高分辨力前视红外相机、高性能CCD(Charge Coupled Device,电荷耦合器件)相机和激光测距仪。但是目前研究较多的是承载大、重量大、体积大的稳定平台,此外,还存在没有POS提供姿态基准不能工作的问题。
目前,已发表专利主要包括两类,第一类是针对航空遥感测绘用大负载三轴惯性稳定平台的设计与控制,如专利“一种多功能航空遥感三轴惯性稳定平台系统”(CN201110214640.9)提出一种针对航空遥感的惯性稳定平台系统,在遥感测绘时实时稳定大型遥感相机,保证相机对地水平;第二类主要是两轴稳定跟踪平台的设计及控制方法,如专利“一种两自由度大负载跟踪稳定平台系统”(CN201310045028.2)提出一种针对大面积电力巡线的两自由度大负载跟踪稳定平台系统,在电力巡线时对相机进行稳定和跟踪;专利“一种基于可控摆系统的双轴水平稳定平台及其控制方法”(CN201010606011.6)提出了一种无陀螺控制方案,没有提及结构系统设计。专利“一种轻型二自由度相机稳定平台装置”(CN201410051218.X)提出双轴平台系统的设计方案,但是主要针对控制系统。
综上,随着轻小型无人机技术的发展和应用的普及,针对轻小型无人机高精度的稳像执行机构有了巨大需求,而相关研究还比较缺乏。本专利从总体出发,研究内容涉及该类无人机轻小型云台的设计和分系统构成,将为无人机轻小型云台的设计提供借鉴。
发明内容
本发明要解决的技术问题是:克服现有技术的不足,提出一种伺服/手控混合式三自由度轻小型无人机遥感云台系统,稳定精度高、可以自主提供姿态基准并可通过手动遥控操作实现大角度快速跟踪,适用于轻小型航空摄影、目标跟踪监测等遥感系统。
本发明解决上述技术问题采用的技术方案是:一种伺服/手控混合式三自由度轻小型无人机遥感云台系统,具有伺服稳定和手控两种工作模式,包括结构系统、动力系统及控制系统;所述的结构系统包括一个基座、四个椭圆板型减振器、一个方位框架、一个横滚框架和一个俯仰框架;所述动力系统包括方位力矩电机,用于驱动方位框架;横滚力矩电机,用于驱动横滚框架;俯仰力矩电机,用于驱动俯仰框架;所述控制系统包括测量组件和控制电路,测量组件包括姿态参考系统、三支MEMS单轴陀螺、一支MEMS加速度计和三支光电码盘,三支MEMS单轴陀螺分别为横滚MEMS陀螺、方位MEMS陀螺与俯仰MEMS陀螺,姿态参考系统、俯仰MEMS陀螺、横滚MEMS陀螺和MEMS加速度计安装在俯仰框架上,方位MEMS陀螺安装在方位框架上,俯仰框架通过俯仰轴系支承吊于横滚框架下,横滚框架通过横滚轴系支承吊于方位框架下,方位框架通过方位轴系支承吊于基座下,基座通过四个减振器与安装底板相连,在伺服稳定工作模式下,安装在云台环架上的三支MEMS单轴陀螺用于敏感飞行载体角运动及云台内外部扰动引起的干扰角速度,通过控制电路输出相应控制信号,并经过驱动电路分别输出到俯仰力矩电机、方位力矩电机与横滚力矩电机,然后分别驱动俯仰框架、方位框架与横滚框架转动,隔离扰动,使云台保持稳定,姿态参考系统提供姿态信息,云台根据这些信息计算云台跟踪地理坐标系的指令角速度,形成俯仰力矩电机、方位力矩电机与横滚力矩电机控制信号,分别驱动俯仰框架、方位框架与横滚框架转动,使平台跟踪地理系,在手控工作模式下,系统根据成像载荷的图像反馈,通过上位机手动操作,实现大角度快速跟踪。
进一步地,所述的方位框架、横滚框架、俯仰框架由外到内分布,三框架回转轴线正交于一点,方位框架沿Z轴方向吊于在基座下,绕Z轴实现±130°旋转;横滚框架沿X轴安装在方位框架上,绕X轴实现±30°旋转;俯仰框架沿Y轴安装在横滚框架上,绕Y轴实现-90°至30°旋转。
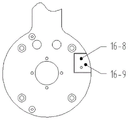
进一步地,方位框架采用单梁结构,其两端为圆柱形状,分别与方位轴系和横滚轴系连接,两端轴线以90°相交于一点,中间连接部分采用30°斜梁与竖直梁结合,此连接部分两侧对称分布有矩形槽,用于电路走线,矩形槽之间的连接部分分布一系列通孔,用于减重,连接部分的竖直梁后侧分布用于安装方位陀螺板的矩形定位槽和螺纹孔,连接横滚轴系的圆柱体前侧分布用于安装横滚锁紧零件的矩形定位槽和螺纹孔。
进一步地,横滚框架采用半框架结构,两端为圆柱体形状分别用于安装俯仰电机轴系和俯仰编码器轴系,横滚轴系安装于横滚框架中部,横滚轴系轴线和俯仰轴系轴线以90°相交于一点,两端的之间的连接部分内外侧对称分布有矩形槽,用于电路走线。
进一步地,俯仰框架以相互正交的四个面构成,成像载荷安装在底面,框架正面有供成像载荷镜头通过的圆形通槽,还有安装俯仰/横滚陀螺转接板的异型定位槽和安装俯仰/横滚陀螺转接板的螺纹孔,底面有两端为半圆形中间为矩形的通槽,安装螺钉通过它固定成像载荷与俯仰框架底面,并可调节成像载荷在槽长方向的安装位置;框架底面还有安装姿态参考系统和加速度计的定位槽和螺纹孔,框架侧面分布有安装俯仰电机轴系和俯仰编码器轴系的安装孔,两安装孔中心线共线,框架两侧面分布有圆形通孔,框架正面分布有异形槽,用于减重。
进一步地,基座通过四支椭圆板型减振器与安装底板相连,减振器隔离来自飞机载体的高频振动;椭圆板型减振器降低了云台的高度,节省安装空间,基座底部有与减振器顶部配合的顶部安装减震器用圆形定位槽,槽中心有槽中心圆形通孔,用于安装固定减振器的螺栓;安装底板上表面有与减振器底部配合的底部安装减震器用圆形定位槽,槽内相应位置有槽内圆形通孔,用于安装固定减振器的螺栓。
本发明的原理是:伺服/手控混合式三自由度轻小型无人机遥感云台系统由三个框架构成,由外至内分别是方位框架、横滚框架和俯仰框架。方位框架的回转轴沿着飞机的航向方向,用以隔离飞机的方位角运动;横滚框架的回转轴沿垂直于飞机飞行方向,用以隔离飞机的横滚角运动;俯仰框架的回转轴沿飞机飞行方向,用以隔离飞机的横滚角运动。
如图2和图3所示,三部直流力矩电机,分别驱动方位框架、横滚框架和俯仰框架转动;安装在俯仰框架上的俯仰/横滚MEMS陀螺仪分别敏感横滚框架沿横滚轴X相对于惯性空间的转动角速度和俯仰框架沿俯仰轴Y相对于惯性空间的转动角速度,安装在方位框架上的方位MEMS陀螺仪敏感方位框架沿方位轴Z相对于惯性空间的转动角速度;安装在俯仰框架上的MEMS加速度计,敏感轴分别与横滚框架、俯仰框架的旋转轴重合;三部光电编码器测量框架间相对转角,分别用于测量方位框架相对于机座的转动角度,横滚框架相对于方位框架的转动角度和俯仰框架相对于横滚框架的转动角度。在伺服稳定工作模式中,伺服控制器根据速率陀螺敏感到的框架角速率信息,加速度计或姿态参考系统测量出的姿态信息和光电编码器的框架相对转角信息产生控制信号,控制信号经过功率驱动模块转换为电压信号给力矩电机,力矩电机输出驱动力矩驱动三个框架转动,实现抵消干扰力矩,实时稳定和调整光电成像载荷视轴的目的。在手控工作模式中,系统根据成像载荷的图像反馈,通过上位机手动操作,实现大角度快速跟踪。
本发明与现有技术相比的优点在于:
(1)本发明具有结构紧凑、重量轻、体积小、跟踪范围大的特点。结构部分采用整体、开放式设计,基座采用圆板型的整体式硬铝合金结构;方位框架采用单梁结构吊于基座下方,横滚框架采用半框架结构安装于方位框架内,俯仰框架根据载荷成像载荷的形状采用两面开口的保护罩结构安装于横滚框架内。采用四个椭圆板型减振器,通过定位槽分别安装在基座下表面和安装底板上表面进行连接,降低了云台的整体高度,使结构更紧凑。
(2)本发明具有伺服稳定和手控两种工作模式。在伺服稳定工作模式中,实现了抵消干扰力矩和实时稳定和调整光电成像载荷视轴;在手控模式中,系统根据成像载荷的图像反馈,实现大角度快速跟踪。
(3)本发明具有可以自主实现水平稳定的特点。平台内部安装加速度计提供位置姿态基准,使平台在没有姿态参考系统情况下可实现水平自主稳定;
(4)本发明具有精度高、响应快的特点。框架驱动系统采用有刷直流力矩电机直接驱动的方式,由于去除了传动环节,从而消除了传动误差,易于实现框架高精度、快响应控制。
附图说明
图1为本发明的组成框图及其连接关系;
图2为本发明的总体二维结构正视图;
图3为本发明的总体二维结构右视图;
图4为本发明的方位框架二维结构右视图;
图5为本发明的方位框架二维结构局部视图1;
图6为本发明的方位框架二维结构局部视图2;
图7为本发明的横滚框架二维结构轴测图;
图8为本发明的俯仰框架二维结构正视图;
图9为本发明的俯仰框架二维结构上视图;
图10为本发明的俯仰框架二维结构左视图;
图11为本发明的俯仰框架二维结构右视图;
图12为本发明的基座二维结构图;
图13为本发明的安装底板二维结构图。
图中附图标记含义为:
1为姿态参考系统;
2-1为俯仰力矩电机;
3为横滚MEMS陀螺;
4为俯仰框架;
4-1为安装俯仰/横滚陀螺转接板的螺纹孔;
4-2为安装俯仰/横滚陀螺转接板的异型定位槽;
4-3为第一异形槽;
4-4为圆形通槽;
4-5为第二异形槽;
4-6为第三异形槽;
4-7为第四异形槽;
4-8为第五异形槽;
4-9为安装姿态参考系统的螺纹孔;
4-10为两端为半圆形中间为矩形的通槽;
4-11为安装MEMS加速度计的定位槽;
4-12为安装MEMS加速度计的螺纹孔;
4-13为俯仰电机轴系安装孔;
4-14为俯仰编码器轴系的安装孔;
4-15为左侧圆形通孔;
4-16为右侧圆形通孔;
4-17为安装姿态参考系统的定位槽;
5为安装底板;
5-1为底部安装减震器用圆形定位槽
5-2为槽内圆形通孔
6为基座;
6-1为顶部安装减震器用圆形定位槽;
6-2为槽中心圆形通孔;
7为方位码盘;
8-1为方位力矩电机;
9为减振器;
10为俯仰码盘;
11为MEMS加速度计;
12为横滚码盘;
13-1为横滚力矩电机;
14为横滚框架;
14-1为俯仰电机轴系连接端;
14-2为内侧矩形槽;
14-3为外侧矩形槽;
14-4为俯仰编码器轴系连接端;
15为方位MEMS陀螺;
16为方位框架;
16-1为横滚轴系连接端;
16-2为竖直梁;
16-3为通孔;
16-4为30°斜梁;
16-5为方位轴系连接端;
16-6为用于安装方位陀螺板的矩形定位槽;
16-7为用于安装方位陀螺板的螺纹孔;
16-8为用于安装横滚锁紧零件的矩形定位槽;
16-9为用于安装横滚锁紧零件的螺纹孔;
16-10为矩形槽;
17为成像载荷;
18为俯仰MEMS陀螺。
具体实施方式
下面结合附图以及具体实施方式进一步说明本发明。
如图1所示,本发明具有伺服稳定和手控两种工作模式。在伺服稳定工作模式下,安装在云台环架上的俯仰MEMS陀螺,横滚MEMS陀螺,方位MEMS陀螺敏感飞行载体角运动及云台内外部扰动引起的干扰角速度,通过控制电路输出相应控制信号,并分别经过驱动电路输出到俯仰力矩电机,横滚力矩电机,方位力矩电机,分别驱动俯仰框架,横滚框架,方位框架转动,隔离扰动,使云台保持稳定。姿态参考系统提供姿态信息,云台根据这些信息计算云台跟踪地理坐标系的指令角速度,形成力矩电机控制信号,驱动俯仰框架,横滚框架,方位框架转动,使云台跟踪地理系。在手控工作模式下,系统根据成像载荷的图像反馈,通过上位机手动操作,实现大角度快速跟踪。
如图2和图3所示,本发明包括结构系统、动力系统及控制系统;本发明包括结构系统、动力系统及控制系统;所述的结构系统包括基座6、四个椭圆板型减振器9、方位框架16、横滚框架14和俯仰框架4;所述动力系统包括方位力矩电机8-1,用于驱动方位框架16;横滚力矩电机13-1,用于驱动横滚框架14;俯仰力矩电机2-1,用于驱动俯仰框架4;所述控制系统包括测量组件和控制电路,测量组件包括姿态参考系统1、俯仰MEMS陀螺18、横滚MEMS陀螺3、方位MEMS陀螺15、MEMS加速度计11、俯仰码盘10、横滚码盘12、方位码盘7。控制电路和驱动电路的电路板集中安装在电路箱内,姿态参考系统1、俯仰MEMS陀螺18、横滚MEMS陀螺3和MEMS加速度计11安装在俯仰框架4上,方位MEMS陀螺15安装在方位框架16上。俯仰框架4通过俯仰轴系支承吊于横滚框架14下,横滚框架14通过横滚轴系支承吊于方位框架16下,方位框架16通过方位轴系支承吊于基座6下,基座6通过四个线振动减振器9与安装底板5相连。
如图4、图5和图6所示,本发明所述的方位框架16采用单梁结构,其方位轴系连接端16-5和横滚轴系连接端16-1为圆柱形,以90°相交于一点。中间连接部分采用30°斜梁16-4与竖直梁16-2结合,此连接部分两侧对称分布有矩形槽16-10,用于电路走线,矩形槽之间的连接部分分布一系列通孔16-3,用于减重。连接部分的竖直梁后侧分布用于安装方位陀螺板的矩形定位槽16-6和用于安装方位陀螺板的螺纹孔16-7。连接横滚轴系的圆柱体前侧分布用于安装横滚锁紧零件的矩形定位槽16-8和用于安装横滚锁紧零件的螺纹孔16-9。
如图7所示,本发明所述的横滚框架14采用半框架结构,俯仰电机轴系连接端14-1和俯仰编码器轴系连接端14-4为圆柱形,横滚轴系安装于横滚框架14中部,横滚轴系轴线和俯仰轴系轴线以90°相交于一点。俯仰电机轴系连接端14-1和俯仰编码器轴系连接端14-4之间的连接部分分布有外侧矩形槽14-3和内侧矩形槽14-2,用于电路走线。
如图8、图9和图10所示,本发明所述的俯仰框架4以相互正交的四个面构成,成像载荷17安装在底面。框架正面有供成像载荷17镜头通过的圆形通槽4-4,还有安装俯仰/横滚陀螺转接板的异型定位槽4-2和安装俯仰/横滚陀螺转接板的螺纹孔4-1。底面有两端为半圆形中间为矩形的通槽4-10,安装螺钉通过它固定成像载荷17与俯仰框架底面,并可调节成像载荷17在槽长方向的安装位置;框架底面有安装姿态参考系统的定位槽4-17和安装姿态参考系统的螺纹孔4-9,安装MEMS加速度计11的定位槽4-11和安装MEMS加速度计11的螺纹孔4-12。框架侧面分布有俯仰电机轴系安装孔4-13和俯仰编码器轴系的安装孔4-14,其中心线共线。框架正面分布有异形槽,异形槽分别可为:第一异形槽4-3,第二异形槽4-5、第三异形槽4-6、第四异形槽4-7、第五异形槽4-8等等,用于减重。框架左右侧面分别分布有左侧圆形通孔4-15和右侧圆形通孔4-16,用于减重。
如图12和图13所示,本发明中基座6通过四支椭圆板型减振器9与安装底板5相连,减振器9隔离来自飞机载体的高频振动;减振器9为椭圆板型,减振器9降低了云台的高度,节省安装空间。基座6底部有与减振器9顶部配合的顶部安装减震器用圆形定位槽6-1,槽中心有槽中心圆形通孔6-2,用于安装固定减振器9的螺栓;安装底板5上表面有与减振器9底部配合的底部安装减震器用圆形定位槽5-1,槽内相应位置有槽内圆形通孔5-2,用于安装固定减振器的螺栓。
Claims (1)
1.一种伺服/手控混合式三自由度轻小型无人机遥感云台系统,具有伺服稳定和手控两种工作模式,其特征在于:包括结构系统、动力系统及控制系统;所述的结构系统包括一个基座(6)、四个椭圆板型减振器(9)、一个方位框架(16)、一个横滚框架(14)和一个俯仰框架(4);所述动力系统包括方位力矩电机(8-1),用于驱动方位框架(16);横滚力矩电机(13-1),用于驱动横滚框架(14);俯仰力矩电机(2-1),用于驱动俯仰框架(4);所述控制系统包括测量组件和控制电路,测量组件包括姿态参考系统(1)、三支MEMS单轴陀螺、一支MEMS加速度计(11)和三支光电码盘,三支MEMS单轴陀螺分别为横滚MEMS陀螺(3)、方位MEMS陀螺(15)与俯仰MEMS陀螺(18),姿态参考系统(1)、俯仰MEMS陀螺、横滚MEMS陀螺和MEMS加速度计(11)安装在俯仰框架(4)上,方位MEMS陀螺(15)安装在方位框架(16)上,俯仰框架(4)通过俯仰轴系支承吊于横滚框架(14)下,横滚框架(14)通过横滚轴系支承吊于方位框架(16)下,方位框架(16)通过方位轴系支承吊于基座(6)下,在伺服稳定工作模式下,安装在云台框架上的三支MEMS单轴陀螺感应飞行载体角运动及云台内外部扰动引起的干扰角速度,通过控制电路输出相应控制信号,并经过驱动电路分别输出到俯仰力矩电机(2-1)、方位力矩电机(8-1)与横滚力矩电机(13-1),然后分别驱动俯仰框架(4)、方位框架(16)与横滚框架(14)转动,隔离扰动,使云台保持稳定,姿态参考系统(1)提供姿态信息,云台根据这些信息计算云台跟踪地理坐标系的指令角速度,形成俯仰力矩电机(2-1)、方位力矩电机(8-1)与横滚力矩电机(13-1)控制信号,分别驱动俯仰框架(4)、方位框架(16)与横滚框架(14)转动,使云台跟踪地理坐标系,在手控工作模式下,系统根据成像载荷(17)的图像反馈,通过上位机手动操作,实现大角度快速跟踪;
所述的方位框架(16)、横滚框架(14)、俯仰框架(4)由外到内分布,三框架回转轴线正交于一点,方位框架(16)沿Z轴方向吊于在基座(6)下,绕Z轴实现±130°旋转;横滚框架(14)沿X轴安装在方位框架(16)上,绕X轴实现±30°旋转;俯仰框架(4)沿Y轴安装在横滚框架(14)上,绕Y轴实现-90°至30°旋转;
方位框架(16)采用单梁结构,其两端为圆柱形状,分别与方位轴系和横滚轴系连接,两端轴线以90°相交于一点,中间连接部分采用30°斜梁(16-4)与竖直梁(16-2)结合,此连接部分两侧对称分布有矩形槽(16-10),用于电路走线,矩形槽之间的连接部分分布一系列通孔(16-3),用于减重,连接部分的竖直梁后侧分布用于安装方位陀螺板的矩形定位槽和螺纹孔,连接横滚轴系的圆柱体前侧分布用于安装横滚锁紧零件的矩形定位槽和螺纹孔;
横滚框架(14)采用半框架结构,两端为圆柱体形状分别用于安装俯仰电机轴系和俯仰编码器轴系,横滚轴系安装于横滚框架(14)中部,横滚轴系轴线和俯仰轴系轴线以90°相交于一点,两端的之间的连接部分内外侧对称分布有矩形槽,用于电路走线;
俯仰框架(4)以相互正交的四个面构成,成像载荷(17)安装在底面,框架正面有供成像载荷(17)镜头通过的圆形通槽(4-4),还有安装俯仰/横滚陀螺转接板的异型定位槽(4-2)和安装俯仰/横滚陀螺转接板的螺纹孔(4-1),底面有两端为半圆形中间为矩形的通槽(4-10),安装螺钉通过它固定成像载荷(17)与俯仰框架底面,并可调节成像载荷(17)在槽长方向的安装位置;框架底面还有安装姿态参考系统和加速度计的定位槽和螺纹孔,框架侧面分布有安装俯仰电机轴系和俯仰编码器轴系的安装孔,两安装孔中心线共线,框架两侧面分布有圆形通孔,框架正面分布有异形槽,用于减重;
基座(6)通过四支椭圆板型减振器(9)与安装底板(5)相连,减振器(9)隔离来自飞机载体的高频振动;椭圆板型减振器(9)降低了云台的高度,节省安装空间,基座(6)底部有与减振器(9)顶部配合的顶部安装减震器用圆形定位槽(6-1),槽中心有槽中心圆形通孔(6-2),用于安装固定减振器(9)的螺栓;安装底板(5)上表面有与减振器(9)底部配合的底部安装减震器用圆形定位槽(5-1),槽内相应位置有槽内圆形通孔(5-2),用于安装固定减振器的螺栓。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201710573377.XA CN107219864B (zh) | 2017-07-14 | 2017-07-14 | 一种伺服/手控混合式三自由度轻小型无人机遥感云台系统 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201710573377.XA CN107219864B (zh) | 2017-07-14 | 2017-07-14 | 一种伺服/手控混合式三自由度轻小型无人机遥感云台系统 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN107219864A CN107219864A (zh) | 2017-09-29 |
| CN107219864B true CN107219864B (zh) | 2020-08-11 |
Family
ID=59952551
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201710573377.XA Expired - Fee Related CN107219864B (zh) | 2017-07-14 | 2017-07-14 | 一种伺服/手控混合式三自由度轻小型无人机遥感云台系统 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN107219864B (zh) |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109599824B (zh) * | 2017-09-30 | 2021-10-26 | 中国科学院长春光学精密机械与物理研究所 | 一种用于伺服跟踪系统的线阻释放机构及伺服跟踪系统 |
| CN108321983B (zh) * | 2018-02-06 | 2019-02-22 | 周禹轩 | 一种轻小型云台框架力矩电机与光电码盘组合式连接装置 |
| CN108490981B (zh) * | 2018-05-04 | 2020-12-18 | 中国电子科技集团公司第三十六研究所 | 一种云台伺服智能控制方法和系统 |
| CN108609193B (zh) * | 2018-06-08 | 2022-05-27 | 重庆交通职业学院 | 用于多旋翼无人热气飞艇的三轴防抖航拍云台 |
| EP3842682A1 (en) * | 2018-08-30 | 2021-06-30 | SZ DJI Technology Co., Ltd. | Cradle head control method and device, cradle head system and unmanned aerial vehicle |
| CN109029107B (zh) * | 2018-09-21 | 2020-05-19 | 中国科学院长春光学精密机械与物理研究所 | 一种机载随动稳定发射平台 |
| CN109733627A (zh) * | 2018-11-21 | 2019-05-10 | 武汉华中天经通视科技有限公司 | 一种非球形机载光电转塔 |
| CN109578507A (zh) * | 2019-01-25 | 2019-04-05 | 吉林大学 | 一种三轴转动航空相机的主被动减振装置 |
| CN112713934A (zh) * | 2020-12-25 | 2021-04-27 | 中国电子科技集团公司第三十四研究所 | 一种用于移动激光通信设备伺服稳定系统的视轴稳定方法 |
| CN115923993A (zh) * | 2023-01-16 | 2023-04-07 | 上海欧萨数据技术有限公司 | 一种无人船视频目标搜索与图像稳定装置 |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103811870A (zh) * | 2012-11-15 | 2014-05-21 | 上海市闵行区知识产权保护协会 | 一种运动载体信号接收系统 |
| CN103149948B (zh) * | 2013-02-04 | 2015-04-22 | 北京航空航天大学 | 一种两自由度大负载跟踪稳定平台系统 |
| WO2014140357A1 (en) * | 2013-03-15 | 2014-09-18 | Freefly Systems Inc. | Method and system for enabling pointing control of an actively stabilized camera |
| CN206206932U (zh) * | 2016-08-30 | 2017-05-31 | 哈瓦国际航空技术(深圳)有限公司 | 一种夜视摄像云台 |
| CN206202715U (zh) * | 2016-11-30 | 2017-05-31 | 深圳市大疆创新科技有限公司 | 拍摄设备和无人飞行器 |
-
2017
- 2017-07-14 CN CN201710573377.XA patent/CN107219864B/zh not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| CN107219864A (zh) | 2017-09-29 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN107219864B (zh) | 一种伺服/手控混合式三自由度轻小型无人机遥感云台系统 | |
| US11036228B2 (en) | Method and system for stabilizing a payload | |
| US11140322B2 (en) | Stabilizing platform | |
| US20200361629A1 (en) | Stabilizing platform | |
| CN103149948B (zh) | 一种两自由度大负载跟踪稳定平台系统 | |
| EP1810502B1 (en) | System and method for stabilizing an image | |
| US5897223A (en) | Stabilized platform system for camera | |
| CN202452059U (zh) | 陀螺稳定云台 | |
| CN103792957B (zh) | 一种轻型二自由度相机稳定平台装置 | |
| CN2413266Y (zh) | 多用途水平稳定平台 | |
| CN102778234B (zh) | 一种高精度大负载惯性稳定平台 | |
| CN102818569B (zh) | 一种五自由度主动磁悬浮惯性稳定平台 | |
| JP2017193208A (ja) | 小型無人航空機 | |
| CN112414402B (zh) | 一种高精度稳定平台系统、控制方法、设备、介质及终端 | |
| CN207523954U (zh) | 无人机载高光谱相机增稳云台 | |
| CN111506119B (zh) | 一种非正交驱动三自由度内框的光电吊舱装置 | |
| RU2009133042A (ru) | Способ управления и стабилизации подвижного носителя, интегрированная система и устройства для его осуществления | |
| CN112882498B (zh) | 具有抑制图像旋转功能的三轴光电搜索跟踪装置及方法 | |
| CN108321983B (zh) | 一种轻小型云台框架力矩电机与光电码盘组合式连接装置 | |
| CN109540171B (zh) | 一种便携式自主定位定向伺服系统 | |
| RU173935U1 (ru) | Устройство стабилизации полезной нагрузки для робототехнических систем | |
| CN106441256B (zh) | 混合型云台 | |
| CN103158883A (zh) | 一种直流电机驱动的减速减振系统 | |
| CN113232876B (zh) | 一种用于sar成像雷达的机载稳定平台系统 | |
| Yang | Analysis and modeling for the framework structures of light-of-sight stabilization tracking platform |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant | ||
| CF01 | Termination of patent right due to non-payment of annual fee | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20200811 Termination date: 20210714 |