CN107148552B - 导电体积内的物体的定位 - Google Patents
导电体积内的物体的定位 Download PDFInfo
- Publication number
- CN107148552B CN107148552B CN201580050782.2A CN201580050782A CN107148552B CN 107148552 B CN107148552 B CN 107148552B CN 201580050782 A CN201580050782 A CN 201580050782A CN 107148552 B CN107148552 B CN 107148552B
- Authority
- CN
- China
- Prior art keywords
- sensors
- sensor
- data
- source
- conductive volume
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images






Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/06—Devices, other than using radiation, for detecting or locating foreign bodies ; Determining position of diagnostic devices within or on the body of the patient
- A61B5/061—Determining position of a probe within the body employing means separate from the probe, e.g. sensing internal probe position employing impedance electrodes on the surface of the body
- A61B5/063—Determining position of a probe within the body employing means separate from the probe, e.g. sensing internal probe position employing impedance electrodes on the surface of the body using impedance measurements
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/05—Detecting, measuring or recording for diagnosis by means of electric currents or magnetic fields; Measuring using microwaves or radio waves
- A61B5/053—Measuring electrical impedance or conductance of a portion of the body
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B2560/00—Constructional details of operational features of apparatus; Accessories for medical measuring apparatus
- A61B2560/02—Operational features
- A61B2560/0223—Operational features of calibration, e.g. protocols for calibrating sensors
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B2560/00—Constructional details of operational features of apparatus; Accessories for medical measuring apparatus
- A61B2560/02—Operational features
- A61B2560/0266—Operational features for monitoring or limiting apparatus function
- A61B2560/0276—Determining malfunction
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B2562/00—Details of sensors; Constructional details of sensor housings or probes; Accessories for sensors
- A61B2562/04—Arrangements of multiple sensors of the same type
- A61B2562/046—Arrangements of multiple sensors of the same type in a matrix array
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/05—Detecting, measuring or recording for diagnosis by means of electric currents or magnetic fields; Measuring using microwaves or radio waves
- A61B5/053—Measuring electrical impedance or conductance of a portion of the body
- A61B5/0538—Measuring electrical impedance or conductance of a portion of the body invasively, e.g. using a catheter
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/24—Detecting, measuring or recording bioelectric or biomagnetic signals of the body or parts thereof
- A61B5/25—Bioelectric electrodes therefor
- A61B5/279—Bioelectric electrodes therefor specially adapted for particular uses
- A61B5/28—Bioelectric electrodes therefor specially adapted for particular uses for electrocardiography [ECG]
- A61B5/283—Invasive
- A61B5/287—Holders for multiple electrodes, e.g. electrode catheters for electrophysiological study [EPS]
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- Biomedical Technology (AREA)
- Animal Behavior & Ethology (AREA)
- Biophysics (AREA)
- Pathology (AREA)
- Veterinary Medicine (AREA)
- Public Health (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Surgery (AREA)
- Physics & Mathematics (AREA)
- General Health & Medical Sciences (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Radiology & Medical Imaging (AREA)
- Human Computer Interaction (AREA)
- Measurement And Recording Of Electrical Phenomena And Electrical Characteristics Of The Living Body (AREA)
Abstract
一种示例性方法包括:将定位信号施加于位于导电体积内的源电极和在已知位置处的接地电极。在分布在导电体积的外表面上的多个传感器电极处感测电活动。每个传感器电极的位置和接地电极的位置被储存在存储器中作为几何形状数据的一部分。在每个传感器电极处感测到的电活动被储存在存储器中作为电气测量数据。所述方法还包括:通过使针对多个传感器电极确定的各对源电压之间的差异最小化来计算源电极的位置。基于电气测量数据和几何形状数据确定每个传感器电极的源电压。
Description
相关申请的交叉引用
该申请要求于2014年9月26日提交的并且题为“NAVIGATION OF OBJECTS WITHINTHE BODY”的美国临时专利申请No.62/056214的优先权,其通过引用以其整体并入本文。
技术领域
本公开涉及身体内的物体的导航。
背景技术
这个部分提供与本公开相关的背景信息,未必是现有技术。
导航系统能够定位体积内的物体。例如,导航系统可以被用于在过程(诸如,外科手术过程)期间跟踪仪器。各种系统(包括电磁系统、光学系统、磁系统、声系统等)可以被用于跟踪仪器。然而,现有技术趋向于不足够准确或者不能实现实时应用。
发明内容
本公开涉及导电体积内的物体的定位。
作为一个示例,一种系统,包括:多个传感器,被配置为在分布在导电体积的外表面上的位置处感测电活动,其中多个传感器中的每个传感器相对于空间坐标系的位置被预先确定并作为几何形状数据被储存在存储器中。源电极位于导电体积内的待确定位置处。信号发生器用于向源电极供应与源电压对应的电能,该电能生成电场。位置计算器被配置为通过使针对多个传感器中的多对传感器确定的源电压之间的差异最小化来计算源电极的位置。基于多个传感器中的每一个相应传感器的响应于对应电场的传感器测量结果和几何形状数据来确定针对多个传感器中的每对传感器的源电压。
作为另一示例,一种方法,包括:将定位信号施加于位于导电体积内待确定位置处的源电极和在导电体积的外表面上的接地电极,其中接地电极的位置是已知的。在分布在导电体积上的多个传感器电极处感测电活动。传感器电极中的每个和接地电极的位置作为几何形状数据的一部分被储存在存储器中。在每个传感器电极处感测到的响应于施加的定位信号的电活动作为电气测量数据被储存在存储器中。该方法还包括:通过使针对多个传感器电极中的多对传感器电极确定的源电压之间的差异最小化来计算源电极的位置。基于电气测量数据和几何形状数据来确定针对每个传感器电极的源电压。
作为另一示例,一种计算机可读介质,存储数据和可由处理器执行的指令。数据包括:几何形状数据,表示多个传感器中的每个传感器的位置;以及测量数据,表示多个传感器中的每个传感器的关于对应电场的感测到的电气测量结果,其中该对应电场是响应于施加导电体积内的源电极的场而生成的。指令包括位置计算器,该位置计算器用于通过使针对多个传感器中的多对传感器确定的源电压之间的差异最小化来计算导电体积内的源电极的方位,其中针对多个传感器中的每个传感器的源电压基于测量数据和几何形状数据而确定,其中测量数据包括多个传感器中的每一个相应的传感器响应于对应电场的传感器测量结果。
附图说明
图1描绘用于确定导电体积内的源的位置的系统的示例。
图2描绘体积导电介质的示例,该体积导电介质主要是电阻性的,并且正在由单极引线注入电刺激。
图3描绘近似通过图2的体积导体的电流的流动的电路的示例。
图4描绘展示外部传感器的一对一配对之间以及心脏中的内部信号源和外部传感器之间的关系的身体的示意性截面视图的示例。
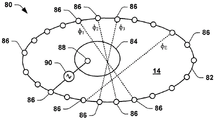
图5描绘展示与其它外部传感器的布置中的每个配对的参考传感器之间的关系的身体的示意性截面视图的示例。
图6描绘导航和测绘系统的示例。
图7是描绘定位导电体积内的源的方法的流程图。
具体实施方式
本公开涉及用于确定体积导体内的物体的位置的系统和方法。例如,可以通过使用在体积导体上分布(例如,以侵入方式和/或以非侵入方式在体积上分布)的传感器的布置以导航和/或定位物体(诸如,导管)来实现该方案。通过先验地知道传感器中的每个相对于先验体积导体的坐标系的空间位置,能够基于从物体发射并且由传感器测量的电信号确定源物体相对于相同坐标系的空间位置。例如,通过使针对多个传感器中的不同对的传感器确定的源电压之间的差异最小化,可以确定源物体的未知位置。基于多个传感器中的相应的一个传感器响应于对应电场(响应于向源电极供应电能而生成的电场)的传感器测量结果和几何形状数据,确定针对传感器中的每对传感器的源电压。作为结果,能够以高级准确性确定物体的绝对空间方位,诸如用于物体的定位或用于有助于将其导航至身体内的期望的地方。
计算的位置能够被进一步用于以图形方式显示对于源的位置的指示,诸如能够对应于导管或其它探针上的一个或多个电极。通过将确定的位置坐标与解剖几何形状协同配准(例如,对于给定病人或通用模型),位置信息的集合能够被共同地显示以表示表面,或者被并入病人解剖结构或通用模型的图形测绘图中。
图1描绘用于对位于导电体积14内的源12进行定位的系统10的示例。导电体积可以是病人的身体或源位于其中的一些其它导电介质。如本文所公开的,源12可以是可以位于体积14内并且在一些情况下在体积14内可移动的源电极或多个电极。例如,源12是在探针(诸如,导管或其它设备)的表面上携带的电极。
多个传感器18可以位于导电体积14上,该多个传感器18可包括在导电体积14的外部表面上和/或在该体积内的传感器。在描述这种传感器在三维空间中的空间几何形状的对应坐标系中,传感器18的位置是已知的。传感器18的位置可以通过成像和/或其它手段(例如,数字化仪、自发现或使用一组传感器检测另一组传感器)来确定。作为一个示例,传感器18可以对应于用于测量电活动(例如,病人的心脏的心电图(ECG))的分布在导电体积14的外部表面的一部分上的表面传感器的高密度布置。在于2009年11月10日提交的国际申请No.PCT/US2009/063803中示出和描述了可以使用的非侵入式传感器阵列的示例,其通过引用并入本文。可以使用传感器164的其它布置和数目。另外或者替代地,在其它示例中,传感器18可以是在导电体积内位于坐标系中已知的各个位置处的传感器电极。
信号发生器16可以与源物体12电气连接以用于向物体供应电能(对应于源电压)。供应的电能(例如,电流或电压)在导电体积中生成可以由传感器18测量的对应电场。电路路径可以从信号发生器和导电体积14延伸。例如,电路路径从信号发生器16延伸到源12,从源延伸到对应的接地电极(该接地电极在导电体积的表面上的已知位置处),并且从接地电极延伸回到信号发生器。
传感器18各自将传感器信号提供给电气测量系统20,该传感器信号表示由每个相应的传感器测量的电活动。电气测量系统20被配置为从每个传感器18接收信号。尽管在图1的示例中展示为与传感器18分开,但电气测量系统20可以包括传感器18,该传感器18可以包括在导电体积(例如,病人的身体)上以非侵入和/或侵入的方式位于已知固定位置处的传感器。在一些示例中,一个或多个侵入式传感器可以在病人的身体内可移动,诸如可以被附接至探针(例如,导管)。正被定位的源电极12可以如这种侵入式传感器那样被安装到相同探针物体并在固定的已知相对位置处,以诸如使一个或多个传感器的探针物体及其补体的位置也能够由位置计算器30确定。
电气测量系统20因此可以执行传感器信号的处理(例如,包括滤波和/或放大)以提供对应电气测量数据22。电气测量数据22可以被储存在对应存储器中。电气测量数据22因此基于由系统实现的由每个传感器18感测到的电信号来提供针对离散的已知位置的信号的测量结果。数据22中的每个电气测量结果可以包括诸如来自系统时钟的时间戳。由信号发生器16施加的定位信号也可以被索引到相同时基以使得能够将测量数据与正被定位的信号同步。
该系统还包括几何形状数据24,几何形状数据24被展示为包括传感器位置数据26和解剖数据28。传感器位置数据26表示已相对于空间坐标系确定的传感器18中的每个的位置。空间坐标系可以与导电体积的结构特征配准。例如,传感器位置18可以被配准在也已配准病人的解剖结构的空间坐标系中,以诸如使能够相对于该空间坐标系确定物体12的坐标。解剖数据28可以包括与导电体积14相关联的几何形状信息,该几何形状信息包括已粘附上传感器18的导电体积14的外表面的表面几何形状以及导电体积内的内部特征的边界。例如,解剖数据28表示心脏的边界,包括其心外膜表面或心内膜表面中的一个或多个。
可以以各种方式生成几何形状数据24。作为一个示例,在传感器18被应用于导电体积的表面时,可以基于导电体积的成像数据提供几何形状数据。图像处理系统可以处理从成像系统(例如,对应于一个或多个成像模态(modality))获取的图像数据,并且提供几何形状数据18。图像处理可以包括从数字图像数据分割解剖特征,这可以识别病人解剖结构的结构边界和基准标记(fiducial markers)以及图像空间内的传感器位置。成像模态的示例包括超声、计算机断层扫描(CT)、3D旋转血管造影术(3DRA)、荧光检查、磁共振成像(MRI)、x射线、正电子发射断层扫描(PET)等。可以分别(例如,在测量之前或在测量期间)执行这种用于生成几何数据的成像。
作为另一示例,传感器可以被配置为经由自发现确定它们的位置。例如,可以在电极之中施加指定编程顺序的电流/电压,并且可以计算所有电极相对于彼此或中性点的空间分布。这种‘自发现’导联集合可以通过使用诸如本文所公开的配准技术而被配准到CT或配准到另一个三维坐标系中。另外或者替代地,可以经由直接配准(例如,使用数字化仪装置的数字化,或记录手动物理测量结果)确定传感器的几何位置。
系统10还包括位置计算器30,位置计算器30被配置为基于电气测量数据22和几何形状数据24计算表示源12的位置的位置数据32。位置数据32因此指定物体12在对应空间坐标系中的位置,物体12的位置可以被配准到导电体积14。例如,位置计算器30实现最小化函数34,最小化函数34被配置为使针对多对传感器18中的每对传感器18确定的源电压值之间的差异最小化。
最小化函数34可以被编程为基于多个传感器18中的每一个相应的传感器18响应于当从信号发生器16供应电能时由源12生成的对应电场的电气测量数据中提供的传感器测量结果来计算物体12的相应源电压。最小化函数34也利用多对传感器中的每对传感器的位置数据作为每个源电压计算的一部分。最小化函数34被配置为基于来自每对选择的传感器的电气测量数据22和所选择的传感器的关联位置数据26来计算在对应空间坐标系中的源位置。如本文所公开的,可以基于几何形状数据24、电气测量数据22、信道完整性和/或响应于用户选择(例如,经由用户输入)来控制每个传感器对的选择。
由于多个传感器18分布在导电体积14周围,所以针对由信号发生器16供应的给定电信号的电气测量数据22在时间上以及在空间上是一致的。因此,位置计算器30可以基于传感器18中的每个已响应于对应电场而同时获取的电气测量数据22来计算位置,其中对应电场响应于由信号发生器16向源供应的信号而生成。控制信号可以激活信号发生器16以周期性地(或间歇地)供应源信号。电气测量系统可以储存具有时间戳(诸如来自系统时钟)的电气测量数据22。由信号发生器施加的定位信号也可以被索引到相同基础以使得能够实现测量数据22与正被定位的信号的同步。测量数据记录还可以包括指定感测到的测量结果属于哪个传感器的字段。传感器标识信息也可以被用于访问针对每个相应的传感器的位置数据26。
位置计算器30包括传感器选择器38以选择和检索用于由最小化函数34使用的每对相应的传感器18的测量数据22。例如,在可用的传感器18的集合(例如,至少3个(诸如,大于20个)传感器)中,传感器选择器38从多个可用的传感器18中选择三对或更多对的不同的传感器。在一些示例中,传感器选择器可以选择每对可用的传感器以用于计算源12的位置。在其它示例中,传感器选择器38选择多对可用的传感器18的合适子集。
作为一个示例,传感器选择器38响应于用户输入(例如,经由图形用户界面)而选择各传感器。例如,用户可以指定从最小化函数34包括一个或多个传感器或排除一个或多个传感器。替代地或者另外地,传感器选择器38可以被编程为自动地确定在执行最小化函数34时利用哪对传感器。例如,为了增加电场的检测的灵敏度,传感器选择器38可以基于其它各种特性(例如,导联向量、由身体表面上的每个场(传感器)点对向的立体角)来选择电极的最佳子集。可以响应于校准引擎36而选择由最小化函数34执行的计算中利用的各对传感器,校准引擎36是用于校准位置计算器30(包括最小化函数34)的预编程方法。校准方法36可以基于电气测量数据22和/或几何形状数据24驱动传感器选择器38。
作为一个示例,校准方法36被配置为将多个传感器18分组为传感器的两个或更多个子集。位置计算器30因此可以应用最小化函数34以通过使可以针对已被标识的每个子集中的每对相应的传感器确定的源电压(例如,由电气测量数据22表示)之间的差异最小化来计算源位置。如果校准方法36标识传感器的超过两个子集,则位置计算器30可以通过聚合已针对传感器的相应子集中的每个子集单独计算的方位值来计算该系统。
作为一个示例,对于传感器的每个子集,可以以不同方式(例如,采用不同电导率或电阻率值)配置最小化函数34。不同组的传感器可以驻留在不同区域体积中,或者形成每个组的传感器对可以散布在体积14的表面上。以这种方式,可以根据每组传感器中的独特空间和/或电气特性调整最小化函数34。
作为另一示例,校准方法36可以包括阻抗计算器40,阻抗计算器40被配置为基于电气测量数据22和/或几何形状数据来计算导电体积14的至少一部分的阻抗。例如,传感器18还可以被配置为将可以由分布在导电体积的表面上的其它传感器检测到的场施加于导电体积的表面。通过施加场并且感测经过导电体积14的相应的场,可以确定整个体积的阻抗的指示。因此,传感器选择器38可以利用通过导电体积的对应部分确定的阻抗以识别传感器18的各个组(诸如根据各对传感器之间的相对阻抗)。
作为另一示例,校准方法36包括均匀性计算器42以确定整个体积14的阻抗的均匀性或非均匀性的指示。例如,均匀性计算器42可以确定各对传感器18之间的导电体积内的均匀性(或非均匀性)的指示。均匀性的指示可以被确定为可以针对驻留在各对传感器18之间的导电体积确定的均匀性的相对指标(index)。例如,均匀性计算器基于由阻抗计算器40针对体积14上的不同对的传感器计算的阻抗值计算均匀性的指标。如本文所公开的,阻抗值可以基于传感器对之间的测量的电气特性(例如,测量数据118的一部分)。传感器选择器38因此可以采用均匀性的相对指示以将传感器分组为传感器的两个或更多个子集。每个组内的所得到的传感器对可以因此被视为在该对之间的导电体积内具有足够水平的均匀性以提高诸如本文所公开的最小化函数34的计算准确性。
作为另一示例,但图4和5展示两个方案的示例,该两个方案可以被用于基于施加的电场(例如,被称为校准场)的电气测量结果而表征导电体积14的阻抗和/或均匀性。校准场可以是双极的(例如,导管的两极)或单极的(在源电极和中性参考或接地电极之间)。图4和5的示例中的每个示例展示了在80(对应于图1的体积14)处展示的体积导体的截面视图,其描述体积的外表面边界(例如,病人的皮肤)82以及沿着虚拟平面的内部结构(例如,病人的心脏)84。另外,多个电极86(对应于图1的传感器18)被部署在表面82上,诸如均匀地分布在体积周围。在图4的示例中,内部电极88也被描述为在体积导体内,诸如可在内部结构84内或以其它方式接触内部结构84。
在一些示例中,表面电极86被配置为既测量电场又将电场从其非侵入(例如,外部)位置传递到身体中。用于从身体表面感测电活动的相同电极86因此可以被用于传递电场。在其它示例中,不同电极86可以与感测电极位于相同或不同的预先确定位置处以在各对电极86、88之间传递电场。因此,信号发生器90可以施加可通过一组或多组电极86、88注入的电场(例如,电流或电压)。
电极86、88因此可以被用作感测电极,以从胸部周围或附近的各种位置检测被施加的电场,校准方法36(例如,包括计算器40和/或42)可以使用该电场来帮助表征胸部阻抗和/或体积的均匀性。由计算器40和/或42计算的值可以在实时计算中被确定,和/或被储存在查询表中,以在求解最小化函数34中补偿阻抗相关误差。位置。
在图4的示例中,信号发生器90在既包括非侵入式外部电极86又包括内部电极88二者的一对电极之间施加电能(例如,具有规定频率的AC信号)。在图5的示例中,信号发生器90在一对非侵入式外部电极86之间施加电能以生成对应电场。从不同对/组电极进行的场注入(例如,电流或电压)和感测能够被实现为以预编程时间顺序发生,或者同时发生但不同组电极具有不同频率。注入的校准场可以是两极场或单极场,并且被注入在任何一对(侵入式或非侵入式)电极之间。例如,电流/电压可以通过时分复用/频分复用而被注入在电极对之间,并且所得到的场可以由其它对传感器86感测。
可以在身体表面上的其它传感器电极86处(例如,作为电流或电压)测量生成的所得到的电场,感测到的场可以被阻抗计算器40用于表征诸如各电极对之间的整个导电体积14的阻抗。另外或者替代地,所得到的场可以由均匀性计算器42测量和使用以指定体积上的均匀性。
另外或者替代地,返回参照图1,可以从诸如CT或MRI图像的成像数据(例如,表示为解剖数据28的一部分)确定任何一对传感器18之间的导电介质的阻抗非均匀性。可以通过校准方法36来确定非均匀性(或均匀性),使得由最小化函数34针对每对传感器实现的源电压计算被相应地调节以考虑非均匀性的对应水平。
在一些示例中,位置计算器30采用信道完整性数据44确定针对传感器18中的任何一个的数据22和24是否应该从该定位方法省略。例如,信道检测器46可以处理电气测量数据22和/或从电气测量系统20接收反馈信息以提供指示哪些信道可提供错误结果的信道完整性数据44。信道检测器46可以实现与相对于美国专利公布No.2013/0304407公开的信道完整性检测系统对应的功能和方法,该专利通过引用并入本文。也可以利用其它信道完整性分析方案。例如,可以利用短路、开路或其它感测问题来识别或生成信道完整性数据44。传感器选择器38因此可以识别和去除坏信道(例如,具有元数据的标记),并且提供传感器18的剩余子集作为由位置计算器30在计算位置数据32中利用的对应电气测量数据22和关联的几何形状数据24的可用资产。
位置数据32因此可以依据电气测量数据22将计算的位置表示为在一个或多个时间实例处在这种给定坐标系中的绝对(或相对)位置,其中该电气测量数据22已经与施加的定位信号同步(例如,通过使用关联的时间戳来对准数据)。通过随着时间过去而重复定位,可随着时间过去(诸如,由位置数据32的时间顺序表示)而跟踪源物体12(例如,对应于探针或其它可移动物体)的移动。在一些示例中,可以在时间上对针对每个跟踪的探针的位置数据32求平均值以提供源的位置的平滑而健壮的显示。求平均值也可以采用其它先验信息(诸如,相邻探针距离等)。位置数据32因此可以被用于生成源位置的可视化,诸如可以被提供在包括病人的解剖结构的图形测绘图中。
位置计算器30因此生成位置数据32以表示物体12在给定坐标系内的位置(例如,基于几何形状数据24)。位置数据32因此可以依据电气测量数据22将计算的位置表示为在一个或多个时间实例处在这种给定坐标系中的绝对位置,其中该电气测量数据22已经与施加的定位信号同步(例如,使用关联的时间戳对准数据)。通过随着时间过去而重复定位,可随着时间过去(诸如,由位置数据32的时间顺序表示)而跟踪源物体12(例如,对应于探针或其它可移动物体)的移动。在一些示例中,可以在时间上对针对每个跟踪的探针的位置数据32求平均值以提供探针的位置的平滑而健壮的显示。求平均值也可以采用其它先验信息(诸如,相邻探针距离等)。位置数据32因此可以被用于生成位置的可视化,诸如可以被提供在包括病人的解剖结构的图形测绘图中。
作为另一示例,图2描绘包括导电介质的体积52的定位系统50的配置,该导电介质的体积52主要是电阻性的(例如,对应于导电体积14)。如图中所展示的,多个传感器电极E1、E2、E3至E_N(其中N是表示传感器电极的数量的正整数)。传感器电极E1、E2、E3至E_N可以基本上均匀地分布在导电体积52的外表面上。电极的数量N是至少三个,并且可以大于20,并且在一些示例中,可以等于或大于200个电极。可以利用的传感器电极E1、E2、E3至E_N的一些布置的示例被公开在以上并入的PCT/US2009/063803中。
定义单极引线的源电极56位于体积52内待确定的位置处。信号发生器58被连接以将电能提供给源电极56。如图2的示例中所例示的,信号发生器被耦接到源电极56和接地电极60,接地电极60位于导电体积上的已知位置处。例如,信号发生器的正端子被耦接到源电极,并且信号发生器的负端子被耦接到接地电极60。尽管在图2的示意性例示图中,接地电极和传感器电极E1-E_N被展示为位于体积52的相对侧,但电极E1-E_N的位置将通常均匀地分布在体积52周围(例如,分布在病人的胸部周围以用于心脏定位)。接地电极60可以位于导电体积52的表面54上用户选择的位置处,这可是预先确定的或任意的。接地电极可以是传感器E1-E_N的相同布置中的一部分,或者它可以是分开的电极。
信号发生器58因此可以在源电极56和接地电极60处注入电能(例如,电流或电压)。在图2中描绘该配置。单极引线被插入到导电体积内部,并且连接到电刺激器的正输出。传感器电极E1-E_N因此被部署在体积导体52的表面上以测量感测到的响应于从注入的电能得到的单极刺激的电活动。每个表面电极和单极引线之间的电阻由R1、R2、R3至R_N表示。每个传感器电极E1-E_N和接地电极60之间的电阻由RG1、RG2、RG3…RG_N表示。单极引线和接地电极60之间的电阻由R_P表示。
可以通过该系统50中的电气配置的近似来计算流经体积导体52的电流,该近似被展示为图3的电路70。在图3的电路70中,可以假设:经过每个记录电极的电流的电导率(σ)和横截面(A)在导电介质中基本上均匀。因此,根据Pouillet定律:
Ri=li/(σ·A)
Rgi=lg/(σ·A)
其中li是电极56和传感器电极E1–E_N中的给定的一个传感器电极之间的长度(例如,空间距离),以及
lg是记录电极和接地电极之间的长度。
从传感器电极E1–E_N中的每个传感器电极测量的电压由Vm1、Vm2、Vm3…Vm_N指示。对于每个电极i,经过的电流可以如下表达:
I=Vo/(Ri+Rgi)
以及来自这个电极的电压测量结果是:
Vmi=I·Rgi
因此,
Vmi=(Vo·Rgi)/(Ri+Rgi)

假设σ和A是常数,针对每个电极i的关系可以如下重写:

如上所提及的,对于表面54上的给定电极布置,针对电极中的每个(包括接地电极60)的位置是已知的(例如,储存在传感器位置数据26中)。因此,电极中的每个的位置ri以及第i电极和接地电极之间的距离Lgi是已知的,或者可以从几何形状数据24导出。位置计算器30因此被配置为计算源电极56的位置,表示为r0。
基于方程(1),每个电极测量结果可以被用于计算源的电压,以及每个源电压当被准确地确定时,导致相同的量。因此,针对从可用的N个电极的集合中选择的给定对的电极i和j的源电压之间的差异应当趋近零,这可以如下表达:

根据方程(2),用于计算源的位置r0的最小化函数可以如下表示:

其中ri和rj分别定义第i和第j电极的位置,并且r0是确定中的源的位置。
方程(2)和(3)是基于σ和A是常数的假设,这可能实际上不是真实的;然而,对于在空间上靠近彼此地驻留的电极(例如,为了限定附近电极的邻近区域),σ和A的值应当接近。因此,电极可以被分组为子集Sk,其中k=1…K(K表示子集的数量)。电极的每个子集被视为驻留在各邻近区域中,其中对于每个这种邻近区域,σ和A是常数的假设被假定为是真实的。每个子集Sk可以是体积52内的连续空间区域。替代地或者另外地,基于各对电极之间的确定的阻抗和/或整个体积中的各种区域的关联的均匀性(例如,由各计算器40和42确定),电极的子集可以被分组为各子集。例如,每个子集Sk可以包括被确定为具有已被分派给每个组的共同范围内的阻抗和/或均匀性指标的多对电极。因此,不同子集可以取决于体积中的源正位于的一部分内的病人解剖结构而变化。基于电极的每个子集的这种假设,下面的最小化可以如下表达:

其中rik和rjk是组Sk中的第i和第j电极的位置,k=1…K,(K是表示组Sk的数量的正整数),以及
r0是源的位置。
在方程(3)和(4)中表示的最小化函数中的每个中,应该理解,不需要计算源的电压,使得没有要解决的不适定逆问题(ill-posed inverse problem)。代替地,定位计算器基于电极测量结果和已知的电极位置来计算位置(例如,在不必解决逆问题的情况下)。
当长度Lg,i和Lg,j是基于测量电极的已知位置ri和固定接地位置的常数时,在|ri-r0|不是线性算子的同时,不能将最小化问题作为线性问题解决。尽管如此,存在用于解决诸如在方程(3)和(4)中表示的本文给出的最小化问题以及用于基于由传感器测量的电信号和已知的传感器位置来计算源的位置的各种数值方法。数值优化方法可以包括强力搜索方法或迭代方法(例如,牛顿方法、梯度下降方法、共轭梯度方法等)。
作为一个示例,强力方法可以涉及系统地从允许的集合内选择输入值并且根据下面的表中示出的方法计算函数34的值(例如,从方程3和/或方程4)。


如以上所提及的,其它方法(诸如,高斯-牛顿方法或梯度下降方法)可以被用于解决这个最小化问题(例如,从方程(3)和(4))。另外,或者替代地,在本文所公开的示例定位(例如,在(3)和(4)中给出的最小化函数)中的每个示例定位中,可以利用关于给定坐标系中的近似位置的先验信息对各最小化函数注入种子,有助于源位置的确定。例如,初始位置可以基于给定坐标系中的先前确定的源位置。替代地,感兴趣的区域内的位置可以被用于向该数值方法注入种子以有助于最小化函数。
图6描绘可以被用于定位感兴趣的体积(诸如,病人的身体154)内的电信号的一个或多个源的另一系统150的示例。可以与执行病人的诊断和/或治疗结合地采用系统150。在一些示例中,作为过程(例如,在电生理学研究期间的信号的监测)的一部分,可以使系统150实现实时地生成信号的对应图形输出和/或对于病人的心脏152的图形测绘图(包括源的位置)。另外或者替代地,系统150可以被用作治疗过程的一部分,以诸如帮助引导医生将传递装置导航至期望的目标地点或区域(例如,包含标识的致心律失常电活动)。
例如,侵入式装置156(诸如,导管)可以被插入到病人的身体154中。装置156包括耦接到侵入式系统158的一个或多个电极(例如,单极引线),侵入式系统158被配置为传递可以被定位的电能。装置156可以施加能量作为定位指定信号、起搏信号,或者用于给予另一治疗,以诸如电气地影响组织(例如,提供电刺激治疗或者控制化学治疗、声波治疗、热治疗的给予,或其任何组合)。
侵入式系统158可以包括控制器160,控制器160被配置为控制信号发生器161在装置156的一个或多个电极处施加定位信号。例如,控制器160可以控制信号发生器161的参数(例如,电流、电压、重复率、触发延迟、感测触发振幅)以用于经由一个或多个电极向心脏152的一个或多个位置给予治疗(例如,消融或刺激)。控制器160可以基于自动控制、手动控制(例如,用户输入)或自动和手动控制的组合(例如,半自动控制)设置治疗参数并且施加刺激。侵入式系统158还可以被配置为经由装置156上的电极测量电活动,处理测量信号,并且提供对应的侵入式测量数据159。
另外,由信号发生器161生成并且施加于装置156上的电极的定位信号可以由在三维坐标系中已知的位置处附接到身体154的多个传感器164测量。传感器164因此可以感测电活动(包括与施加的定位信号对应的信号)。传感器164也可以感测其它电信号(诸如,对应于对于病人的心脏的实时电描记图)。
可以经由定位方法180引导装置156的放置,定位方法180可以采用诸如本文所公开的最小化函数来操作以对装置156进行定位。定位方法180可以对应于位置计算器30(包括传感器选择器38和校准方法36)。例如,定位方法180因此可以通过使针对多个传感器中的不同对的传感器确定的源电压之间的差异最小化来评估成本函数。如本文所公开的,由该定位方法使用的传感器测量结果具有由几何形状数据172定义的已知位置,并且传感器可以为非侵入式和/或侵入式。因此,基于非侵入式测量数据170和几何形状数据172确定针对非侵入式传感器的源电压,并且基于侵入式测量数据159和几何形状数据172确定针对侵入式传感器的源电压。基于提供的信息,引导可以被自动化、半自动或手动地实现。在定位期间,装置156上的单极源电极可以在心内膜或在心外膜接触或不接触病人的心脏152。
作为另一示例,侵入式系统158可以位于病人的身体154的外部,并且被配置为控制正在由装置156给予的治疗。例如,系统158也可以控制经由电气地连接在传递装置(例如,一个或多个电极)156和系统158之间的导电链路提供的电信号。一个或多个传感器(未示出但可以是装置的一部分)也可以将传感器信息传送回系统158。
可以通过执行如本文所公开的定位来确定在三维空间中装置156在心脏152中的位置,当在过程期间实现该定位时,可以经由输出系统162在手术中跟踪装置156的位置。装置156的位置和治疗参数因此可以被分析以帮助控制治疗。另外,治疗的施加(例如,响应于用户输入手动地提供或自动地提供)可以使时间戳或其它时间标识符被标注(例如,作为元数据)于测量数据以标识何时施加治疗,并且触发定位以经由装置156标识施加治疗的位置。描述治疗的其它元数据(例如,类型、传递参数等)也可以与测量数据一起被储存。
在(例如,经由系统158)给予治疗之前、期间和/或之后,可以利用非侵入式测量系统166或侵入式系统158中的一个或多个获取病人的电生理学信息。测量系统166可以同时获取导航信号和测绘信号以有助于同时的测绘和导航。在图6的示例中,一个或多个传感器164可以被实现为用于记录病人电活动的阵列或其它配置。作为一个示例,传感器164可以对应于分布在病人的躯干的一部分上的身体表面传感器的高密度布置以用于测量与病人的心脏关联的电活动(例如,作为心电图测绘过程的一部分)。在以上并入的于2009年11月10日提交的国际申请No.PCT/US2009/063803中示出和描述了可以使用的非侵入式传感器阵列的示例。可以使用传感器164的其它布置和数量。作为示例,传感器164可以是减少的一组传感器,该减少的一组传感器不覆盖病人的整个躯干,而被设计成用于出于特定目的测量电活动(例如,为了分析AF和/或VF而专门设计的电极的阵列)和/或用于监测心脏的预先确定空间区域。
可以单独地或者与非侵入式传感器164结合地利用位于装置156上的传感器,以绘测针对心内膜表面(诸如,心室的壁)以及心外膜表面的电活动。在用于获取实时病人电信息的这种示例性方案(包括经由装置156以侵入方式、经由传感器164以非侵入方式,或侵入和非侵入感测的组合)中的每个方案中,实时感测的电信号被提供给它的对应测量系统158、166。类似于侵入式系统158,测量系统166可以包括恰当的控制器和信号处理电路168以用于提供描述由传感器164检测的电活动的对应的测量数据170。测量数据170可以包括模拟和/或数字信息(例如,对应于由传感器164获取的电描记图数据)。因此,测量数据159和170可以对应于如本文所公开的用于定位的测量电信号。
控制器168还可以被配置成控制用于测量电活动和提供测量数据170的数据获取处理(例如,采样速率、线滤波)。在一些示例中,控制器168可以与侵入式系统操作分开地(诸如,响应于用户输入)控制测量数据170的获取。在其它示例中,可以与出于定位的目的由信号发生器161施加的特定信号同时并且同步地获取测量数据170。例如,合适的时间戳可以被用于对各测量数据159和170与传递定位信号之间的时间关系编索引。定位信号可以是由信号发生器专门地为了能够实现定位而施加的独特信号。另外或者替代地,信号发生器可以自动地或响应于用户输入而施加定位信号以用于给予治疗。在任一示例中,非侵入式测量系统166可以经由传感器测量身体表面电活动以提供对应的测量数据170。处理系统162因此可以执行各种信号处理和变换方法(包括定位方法180)以根据本文公开的定位方法定位每个源。
定位方法180可以被配置为基于测量数据170和/或159以及关联的几何形状数据172实现任何定位方法。由定位方法180确定的坐标可以被输出发生器188利用以提供输出数据174。输出数据174可以基于根据本文的方案确定的源电极的坐标而表示或表征装置在三维空间中的位置。另外,位置(或对应路径)可以被显示在心脏包络上的空间位置处(例如,心脏152的心外膜或心内膜表面上)。输出发生器188可以单独地显示位置。在其它示例中,位置可以与其它输出数据组合,以诸如在心脏152的电活动的图形测绘图上显示位置信息。
由于在一些示例中测量系统166可以同时测量预先确定区域或整个心脏(例如,其中,传感器164在几何形状数据172中定义的预先确定位置处均匀地分布在病人的身体154的整个胸部上)的电活动,所以测量结果在空间上以及在时间上是一致的。因此,当与其它定位技术相比时,在输出数据174中提供的所得到的输出位置的准确性可以增加,以诸如为用户供应更准确的、全局的信息从而有助于治疗的监测和应用。另外或者替代地,该定位可以是连续的过程和/或相对于由系统158提供的治疗的应用同步。
作为另一示例,电气测量数据经由身体表面传感器164非侵入地获得,电描记图重构186可以被编程为基于测量数据170和几何形状数据172计算逆解并且提供对应重构电描记图。因此,重构的电描记图可以对应于包络上的心电图活动,以及可以包括静态(在给定时刻是三维的)和/或动态(例如,随着时间过去而变化的四维图)。可以在系统150中利用的逆算法的示例包括在美国专利NO.7,983,743和NO.6,772,004中公开的那些逆算法,其通过引用并入本文。EGM重构186因此可以将经由传感器164测量的身体表面电活动重构到包络上的许多位置(例如,大于1000个位置,诸如大约2000个位置或更多位置)上。在其它示例中,输出系统162可以基于(诸如经由装置156(例如,包括篮状导管或其它形式的测量探针))以侵入方式测量的电活动来计算心脏的子区域上的电活动。
如本文所公开的,重构包络(例如,心脏包络)可以对应于与病人的心脏对应的三维表面几何形状,该表面可以是心外膜表面或心内膜表面。替代地或者另外地,该包络可以对应于驻留在病人的心脏的心外膜表面和传感器164所在的病人的身体的表面之间的几何表面。另外,由电描记图重构186利用的几何形状数据172可以对应于实际的病人解剖几何形状、预编程的通用模型或者其组合(例如,基于病人解剖结构修改的模型)。经由定位方法180计算的位置可以与几何形状数据172(例如,解剖几何形状)协同配准。
类似于相对于图1所描述的,几何形状数据172可以具有病人的躯干的图形表示的形式,诸如针对病人获取的图像数据。这种图像处理(例如,成像处理104)可以包括从数字图像集提取和分割解剖特征(包括一个或多个器官和其它结构)。另外,诸如通过在电极被部署在病人身上时获取图像并且通过恰当的提取和分割在坐标系中标识电极位置,可以将用于源定位的传感器164(包括非侵入式和/或侵入式传感器)中的每个传感器的位置包括在几何形状数据172中。
作为另一示例,第一组非侵入式传感器电极可以在成像(例如,经由CT或MRI)之前被固着在胸部周围,并且可以经由图像处理确定这种电极的位置。这些传感器中的一些或全部可以随后被用于定位固定在病人的身体154内(诸如,在心内膜、在心外膜或固定在身体内的其它位置)的另一组传感器。也可以利用其它基于非成像的技术(诸如,使用数字化仪、自发现或手动测量)来获得传感器阵列中的电极在坐标系中的位置,该位置可以被储存在几何形状数据172中。一旦传感器(侵入式和/或非侵入式传感器)的位置具有已知位置,如本文所公开,它们的测量结果可以由定位方法180选择性地使用。
几何形状数据172可以对应于数学模型,诸如可以是通用模型或已经基于病人的图像数据构造的模型。可以在几何形状数据172中标识恰当的解剖或其它标记(包括传感器164的位置)以结合该装置的计算的位置信息显示。可以手动(例如,由人经由图像编辑软件)或自动地(例如,经由图像处理技术)完成这种标记的标识。
作为另一示例,可以通过使用可以基于其构造几何表面的对应表示的几乎任何成像模态(诸如本文所述的)来获取几何形状数据172。可与记录用于生成病人测量数据170的电活动同时执行这种成像,或者可以单独地执行该成像(例如,在已获取测量数据之前或之后)。
输出发生器188可以生成对应的输出数据174,该对应输出数据174转而可以在显示器192中提供对应的图形输出(诸如,包括装置156的位置的指示)。该位置可以被显示在病人解剖结构的图形模型上或叠加在心电图测绘194上。该位置可以采取其它形式以向用户提供诸如本文所公开的引导。
图形用户界面(GUI)190可以被用于与处理系统162和/或系统158和/或166交互。例如,GUI可以被用于与计算的测绘图的输出可视化对应地设置与显示的图形表示关联的参数(诸如包括选择时间间隔),可以响应于用户输入而选择将要在可视化中给出的信息的类型等。另外,用户可以采用GUI 190以选择性地对一个或多个参数(例如,模型和空间阈值、滤波器参数等)进行编程和/或配置由定位方法182利用的最小化函数(例如,设置期望的分辨率、关联传感器对、定义传感器的组等)。
另外,在一些示例中,与控制治疗的给予或监测电气特性结合,输出数据174可以被侵入式系统158利用。实现的控制器160可以是基于输出数据174的全自动控制、半自动控制(部分自动化且响应于用户输入)或手动控制。在一些示例中,侵入式系统158的控制器160可以利用输出数据174以控制一个或多个治疗参数。作为示例,控制器160可以基于标识的一个或多个心律失常驱动器控制向心脏的位置(例如,心外膜或心内膜壁)给予起搏治疗。在其它示例中,个人可以观察在显示器中生成的绘测图194以手动控制在基于本公开确定的位置处的治疗系统。也可以基于输出数据174和对应的图形测绘图194控制其它类型的治疗和装置。
考虑到上述结构和功能特征,将会参照图7更好地了解某些方法。图7描绘用于定位导电体积内的源物体的方法200的示例。应该理解和了解,在其它实施例中,所例示出的动作可按照不同次序发生或与其它动作同时发生。此外,可能并非需要图7中示出的所有特征来实现方法。还应该理解,下面的方法能够以硬件(例如,一个或多个诸如计算机或专用集成电路的处理器)、软件(例如,储存在计算机可读介质中或储存为在一个或多个处理器上运行的可执行指令)来实现,或作为硬件和软件的组合来实现。
可以根据本文公开的任何系统或方法来实现方法200。方法200开始于202,在202中,针对给定坐标系(例如,经由几何形状数据24或172)定义传感器的位置。如本文所公开的,传感器的位置可以是侵入的和/或非侵入的。在204处,(例如,由信号发生器16或161)施加信号以在源处生成电场。在206处,响应于施加的信号而(例如,由传感器18或164和关联的测量系统20或166)测量电信号。
在208处,使针对多对传感器确定的源电压之间的差异最小化(例如,通过求解最小化函数34)以确定源在坐标系中的对应位置。假设在导电体积中存在足够的均匀性,可以相对于所有传感器共同地执行在208处的最小化。替代地,可以相对于电极的多个不同子集执行在208处的最小化,并且可以通过聚合已针对传感器的各子集中的每个子集确定的各位置来确定该位置。例如,可以根据本文公开的方程(3)和/或(4)来实现该最小化。
在210处,确定的位置被储存在存储器中。存储器可以包括可访问以供检索的任何本地或远程存储器(例如,易失性和/或非易失性存储器),诸如用于由与实现方法200的计算机相同或不同的计算机使用。储存的源位置可以因此表示定位的源的空间坐标。如以上所提及的,在一些示例中,存在多个源,该多个源可在相同或不同的探针上,并且对于每个这种源,可以在210处储存这种各位置中的每个。在212处,诸如在生成并且提供给显示装置的输出中,物体的位置能够被可视化。例如,标识的位置可以覆加在病人的解剖结构(诸如,心脏或经由方法200将源定位以驻留的其它解剖区域)的图形测绘图中。通过在共同坐标系中或(经由配准或变换)确定位置和图形测绘图,有助于源电极位置以及携带在16处被确定其位置的场源的装置的可视化。
鉴于前述的结构和功能描述,本领域技术人员将会了解,本发明的各部分可被实施为方法、数据处理系统或计算机程序产品。因此,本发明的这些部分可采取完全硬件实施例、完全软件实施例或者组合软件和硬件的实施例的形式。另外,本发明的各部分可以是计算机可用储存介质上的计算机程序产品,该计算机可用储存介质在该介质上具有计算机可读程序代码。可利用任何合适的计算机可读介质,包括但不限于静态和动态储存装置、硬盘、光学储存装置和磁储存装置。
本文也已参照方法、系统和计算机程序产品的方框例示图描述本发明的某些实施例。将会理解,例示图的方框和例示图中的方框的组合可以由计算机可执行指令实现。这些计算机可执行指令可被提供给通用计算机、专用计算机或其它可编程数据处理设备(或者装置和电路的组合)的一个或多个处理器以产生机器,使得经由处理器执行的指令实现在一个或多个方框中指定的功能。
这些计算机可执行指令还可被储存在计算机可读存储器中,该计算机可读存储器可以指引计算机或其它可编程数据处理设备以特定方式工作,使得储存在计算机可读存储器中的指令导致一件制品,该制品包括实现一个或多个流程图方框中指定的功能的指令。计算机程序指令也可被加载到计算机或其它可编程数据处理设备上,以引起在计算机或其它可编程设备上执行一系列的操作步骤以产生计算机实现的处理,使得在计算机或其它可编程设备上执行的指令提供用于实现在一个或多个流程图方框中指定的功能的步骤。
以上描述的内容是示例。当然,无法描述结构、部件或方法的每个想得到的组合,但本领域普通技术人员将会意识到,许多另外的组合和排列是可行的。因此,本发明意在包括落在本申请(包括所附权利要求)的范围内的所有这种替代、修改和变化。在本公开或权利要求叙述“一”、“一个”、“第一”或“另一”元件或其等同物的情况下,它应该被解释为包括一个或多个这种元件,既不需要也不排除两个或更多的这种元件。如本文所使用,术语“包括”意味包括但不限于,以及术语“包含”意味包含但不限于。术语“基于”意味至少部分地基于。
Claims (24)
1.一种系统,包括:
多个传感器,被配置为在分布在导电体积上的位置处感测电活动,所述多个传感器中的每个传感器相对于空间坐标系的位置被预先确定并作为几何形状数据被储存在存储器中;
源电极,位于所述导电体积内待确定的未知位置处;
信号发生器,用于向所述源电极供应对应于源电压的电能,以在所述导电体积内生成电场,电路路径从所述源电极延伸到在所述导电体积的外表面上的位置处的电接地,所述电接地被耦接到所述信号发生器;以及
位置计算器,实现为由系统中的计算机处理器执行的指令,并且被配置为通过使针对所述多个传感器中的多对传感器确定的经确定的源电压之间的差异最小化来计算所述源电极的位置,基于所述多个传感器中的每一个相应的传感器的响应于所述电场的电压的传感器测量结果并且基于从所述几何形状数据确定的传感器的相对位置来确定每个经确定的源电压。
2.如权利要求1所述的系统,其中所述位置计算器被配置为基于所述多个传感器中的每个传感器的响应于所述电场而同时获取的所述传感器测量结果来计算所述源电极的位置。
3.如权利要求2所述的系统,其中所述多个传感器包括分布在导电体积上的至少三个电极。
4.如权利要求1所述的系统,其中指定所述多个传感器中的每个传感器的预先确定的位置的所述几何形状数据包括通过自发现、基于成像数据或数字化仪中的至少一个生成的信息,其中,在自发现中,传感器相对于彼此或中性点的空间分布是基于在传感器之中施加的电流/电压的编程顺序来计算的。
5.如权利要求1所述的系统,还包括:信道完整性检测器,实现为由系统中的计算机处理器执行的指令,并且基于信道信号相对于空间相邻信道的信号的相关性、信道信号的幅度、信道为短路电路和/或信道为开路电路中的一项或多项来识别信道以针对后续分析进行排除,使针对每个识别的信道的所述几何形状数据和所述传感器测量结果不可用于由所述位置计算器执行的所述计算。
6.如权利要求1所述的系统,还包括:体积阻抗数据,被储存在所述存储器中以表征所述导电体积的阻抗,所述位置计算器基于所述体积阻抗数据来考虑在所述导电体积的所述阻抗上的变化。
7.如权利要求6所述的系统,还包括:阻抗计算器,实现为由系统中的计算机处理器执行的指令,并且被配置成基于由所述多个传感器响应于施加至所述导电体积的所述电场而感测到的电场来生成所述体积阻抗数据。
8.如权利要求1所述的系统,还包括:校准引擎,实现为由系统中的计算机处理器执行的指令,并且被配置为通过将每个传感器分派给子集之一将所述多个传感器分组为所述多个传感器的多个子集,所述位置计算器通过使针对所述多个传感器的至少一个子集中的各传感器对确定的源电压之间的差异最小化来计算所述源电极的位置。
9.如权利要求8所述的系统,其中所述位置计算器通过聚合根据从所述多个传感器的至少两个子集获取的对应的传感器测量结果而分别计算的源位置值来计算所述源电极的位置。
10.如权利要求8所述的系统,其中所述多个传感器的多个子集中的每个子集由所述校准引擎基于所述体积阻抗数据、所述几何形状数据或成像数据中的至少一个自动地确定。
11.如权利要求8所述的系统,其中所述校准引擎被配置为响应于在所述多个传感器的各子集中的每个子集中选择包括哪些传感器的用户输入来确定所述多个传感器到所述多个传感器的所述多个子集的分派。
12.如权利要求1所述的系统,其中所述位置计算器还包括传感器选择器,所述传感器选择器实现为由系统中的计算机处理器执行的指令,并且被配置为从所述多个传感器中选择至少三对不同的传感器,所述位置计算器基于来自所述选择的多对传感器的所述传感器测量结果来计算位置。
13.如权利要求12所述的系统,还包括:信道完整性检测器,用于基于信道信号相对于空间相邻信道的信号的相关性、信道信号的幅度、信道为短路电路和/或信道为开路电路中的一项或多项来识别信道以针对后续分析进行排除,以提供所述多个传感器的剩余可用子集,所述传感器选择器从所述剩余可用子集中选择出所述选择的多对传感器中的每对传感器。
14.如权利要求12所述的系统,其中所述位置计算器还包括均匀性计算器,所述均匀性计算器实现为由系统中的计算机处理器执行的指令,并且被配置为确定所述导电体积在各对传感器之间的均匀性的指示,所述传感器选择器基于所述均匀性的指示将所述选择的多对传感器中的每对传感器选择到传感器的相应子集中。
15.如权利要求14所述的系统,还包括:阻抗计算器,实现为由系统中的计算机处理器执行的指令,并且被配置为确定表示整个所述导电体积的阻抗的阻抗数据,所述均匀性计算器基于所述阻抗数据确定所述导电体积的均匀性的所述指示。
16.如权利要求1所述的系统,其中所述多个传感器包括位于所述导电体积的外表面上的多个非侵入式传感器和/或位于所述导电体积内的传感器。
17.一种方法,包括:
将定位信号施加于位于导电体积内的源电极和相对于所述导电体积位于已知位置的接地电极,接地电极的所述已知位置被储存在存储器中作为几何形状数据的一部分;
在分布在所述导电体积上的多个传感器电极处感测电活动,所述传感器电极中的每个传感器电极的位置被相对于空间坐标系预先确定并被储存在所述存储器中作为几何形状数据的一部分,在所述多个传感器电极中的每个传感器电极处感测到的响应于所述施加的定位信号的所述电活动被储存在所述存储器中作为电气测量数据;以及
通过使针对所述多个传感器电极确定的各对经确定的源电压之间的差异最小化来计算所述源电极的位置,基于如在所述电气测量数据中反映的施加至所述源电极的所述定位信号并且还基于从所述几何形状数据确定的所述多个传感器电极的相对位置来确定针对每个传感器电极的每个经确定的源电压。
18.如权利要求17所述的方法,其中计算所述源电极的位置还包括:
基于在所述多个传感器电极中的每个传感器电极处感测到的电活动并且依据所述各传感器电极的位置和所述接地电极的位置来计算关联的所述源电压;
选择多对传感器电极中的每对传感器电极;以及
计算针对所述选择的多对传感器电极中的每对传感器电极计算的源电压之间的差异。
19.如权利要求17所述的方法,其中在计算所述源电极的位置之前,所述方法还包括:
通过将每个传感器电极分派给多个子集之一,将所述多个传感器电极分组为所述传感器电极的多个子集;
针对所述传感器电极的所述多个子集中的至少两个子集中的各传感器对单独地计算所述源电极的位置;以及
组合针对传感器电极的所述多个子集中的每个子集计算的所述源电极的位置。
20.如权利要求19所述的方法,其中将所述多个传感器电极分组还包括表征所述导电体积的阻抗或均匀性中的至少一个以选择哪些传感器电极属于所述传感器电极的所述多个子集中的哪个子集。
21.如权利要求17所述的方法,其中在计算所述源电极的位置之前,所述方法还包括:校准用于计算的最小化函数,所述校准基于所述几何形状数据、所述电气测量数据、信道检测数据中的至少一个或响应于用户输入来实现。
22.如权利要求17所述的方法,还包括:生成输出以使所述源电极的相对于所述导电体积的位置可视化。
23.如权利要求17所述的方法,其中所述多个传感器电极以非侵入方式位于所述导电体积的外表面上和/或以侵入方式位于所述导电体积内。
24.一种计算机可读介质,储存可由处理器执行的数据和指令,其中所述数据包括:
几何形状数据,表示在分布在导电体积的外表面上的位置处的多个传感器中的每个传感器的位置;以及
测量数据,表示所述多个传感器中的每个传感器的感测到的电气测量结果,感测到的电气测量结果对应于响应于将电能施加于位于所述导电体积内的源电极而生成的电场;
其中所述指令包括位置计算器,所述位置计算器用于通过使针对所述多个传感器中的多对传感器确定的经确定的源电压之间的差异最小化来计算所述源电极在所述导电体积内的位置,每个经确定的源电压是基于包括所述感测到的电气测量结果的测量数据和从几何形状数据确定的所述多个传感器的相对位置来确定的。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201462056214P | 2014-09-26 | 2014-09-26 | |
| US62/056,214 | 2014-09-26 | ||
| PCT/US2015/052647 WO2016049630A1 (en) | 2014-09-26 | 2015-09-28 | Localization of objects within a conductive volume |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN107148552A CN107148552A (zh) | 2017-09-08 |
| CN107148552B true CN107148552B (zh) | 2020-09-18 |
Family
ID=55582155
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201580050782.2A Expired - Fee Related CN107148552B (zh) | 2014-09-26 | 2015-09-28 | 导电体积内的物体的定位 |
Country Status (4)
| Country | Link |
|---|---|
| US (2) | US10568540B2 (zh) |
| EP (1) | EP3198225B1 (zh) |
| CN (1) | CN107148552B (zh) |
| WO (1) | WO2016049630A1 (zh) |
Families Citing this family (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10713800B2 (en) | 2017-05-26 | 2020-07-14 | Cardioinsight Technologies, Inc. | Ultrasound-based geometry determination for electrophysiological mapping |
| EP4279004B1 (en) * | 2017-10-26 | 2025-08-13 | Boston Scientific Scimed, Inc. | Use of electromagnetic fields in ire device delivery and therapy monitoring |
| US10918310B2 (en) * | 2018-01-03 | 2021-02-16 | Biosense Webster (Israel) Ltd. | Fast anatomical mapping (FAM) using volume filling |
| US10722141B2 (en) * | 2018-04-30 | 2020-07-28 | Biosense Webster (Israel) Ltd. | Active voltage location (AVL) resolution |
| EP3817647A1 (en) * | 2018-07-04 | 2021-05-12 | Navix International Limited | System and method for conductivity-based imaging |
| US20200163583A1 (en) * | 2018-11-23 | 2020-05-28 | Biosense Webster (Israel) Ltd. | Compensating for artifacts while tracking an intrabody probe |
| US11547482B2 (en) * | 2018-12-13 | 2023-01-10 | Mako Surgical Corp. | Techniques for patient-specific morphing of virtual boundaries |
| US11596471B2 (en) * | 2019-03-22 | 2023-03-07 | Boston Scientific Scimed, Inc. | Tracking catheters based on a model of an impedance tracking field |
| FR3110255B1 (fr) * | 2020-05-15 | 2022-05-27 | Elwave | Procede de detection dans un milieu conducteur de l’electricite |
| FR3136861B1 (fr) * | 2022-06-16 | 2024-05-24 | Ttk | Réseau de capteurs linéaires à auto-découverte |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2001025822A1 (en) * | 1999-10-07 | 2001-04-12 | Massachusetts Institute Of Technology | Method and apparatus for guiding ablative therapy of abnormal biological electrical excitation |
| EP2064987B1 (en) * | 2007-11-28 | 2013-05-15 | Olympus Medical Systems Corp. | Capsule medical system and biological information acquiring method |
| CN103813748A (zh) * | 2011-09-13 | 2014-05-21 | 圣犹达医疗用品电生理部门有限公司 | 利用阻抗和磁场测量的导管导航 |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE69315354T2 (de) * | 1992-09-23 | 1998-03-19 | Endocardial Solutions Inc | Endokard-mapping system |
| US7263397B2 (en) | 1998-06-30 | 2007-08-28 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Method and apparatus for catheter navigation and location and mapping in the heart |
| US6308093B1 (en) * | 1999-10-07 | 2001-10-23 | Massachusetts Institute Of Technology | Method and apparatus for guiding ablative therapy of abnormal biological electrical excitation |
| US7756576B2 (en) | 2005-08-26 | 2010-07-13 | Biosense Webster, Inc. | Position sensing and detection of skin impedance |
| US7885707B2 (en) * | 2005-09-15 | 2011-02-08 | St. Jude Medical, Atrial Fibrillation Division, Inc. | Method of scaling navigation signals to account for impedance drift in tissue |
| US20080190438A1 (en) * | 2007-02-08 | 2008-08-14 | Doron Harlev | Impedance registration and catheter tracking |
| US20090118620A1 (en) | 2007-11-06 | 2009-05-07 | General Electric Company | System and method for tracking an ultrasound catheter |
| US8538509B2 (en) * | 2008-04-02 | 2013-09-17 | Rhythmia Medical, Inc. | Intracardiac tracking system |
| US9023027B2 (en) | 2008-09-30 | 2015-05-05 | Biosense Webster (Israel), Ltd. | Current localization tracker |
| US9113824B2 (en) | 2011-01-31 | 2015-08-25 | Biosense Webster (Israel), Ltd. | Compensation for respiratory motion |
| US9693820B2 (en) * | 2013-03-15 | 2017-07-04 | St. Jude Medical, Atrial Fibrillation Division, Inc. | System for detecting catheter electrodes entering into and exiting from an introducer |
-
2015
- 2015-09-28 US US14/867,716 patent/US10568540B2/en not_active Expired - Fee Related
- 2015-09-28 EP EP15844438.0A patent/EP3198225B1/en active Active
- 2015-09-28 WO PCT/US2015/052647 patent/WO2016049630A1/en not_active Ceased
- 2015-09-28 CN CN201580050782.2A patent/CN107148552B/zh not_active Expired - Fee Related
-
2020
- 2020-02-11 US US16/787,828 patent/US11666242B2/en active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2001025822A1 (en) * | 1999-10-07 | 2001-04-12 | Massachusetts Institute Of Technology | Method and apparatus for guiding ablative therapy of abnormal biological electrical excitation |
| EP2064987B1 (en) * | 2007-11-28 | 2013-05-15 | Olympus Medical Systems Corp. | Capsule medical system and biological information acquiring method |
| CN103813748A (zh) * | 2011-09-13 | 2014-05-21 | 圣犹达医疗用品电生理部门有限公司 | 利用阻抗和磁场测量的导管导航 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN107148552A (zh) | 2017-09-08 |
| EP3198225A4 (en) | 2018-05-30 |
| EP3198225B1 (en) | 2019-11-20 |
| WO2016049630A1 (en) | 2016-03-31 |
| US10568540B2 (en) | 2020-02-25 |
| US20200170540A1 (en) | 2020-06-04 |
| US11666242B2 (en) | 2023-06-06 |
| US20160089057A1 (en) | 2016-03-31 |
| EP3198225A1 (en) | 2017-08-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN107148552B (zh) | 导电体积内的物体的定位 | |
| US11131536B2 (en) | Localization and tracking of an object | |
| CN107666856B (zh) | 提供几何形状信息的磁感测 | |
| CN106255455B (zh) | 采用补充信息改善反演问题的解 | |
| US10441188B2 (en) | Automatic display of earliest LAT point | |
| US10506948B2 (en) | Localization for electrocardiographic mapping | |
| EP3294127A1 (en) | Systems and methods for tracking an intrabody catheter | |
| US11317966B2 (en) | Impedance-based position tracking performance using scattered interpolant | |
| JP2015020074A (ja) | 周波数の識別による心臓活動の可視化 | |
| CN111712188B (zh) | 用于重构电生理活动的多维基本解方法 | |
| US12133736B2 (en) | Determining bipolar electrical activity |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20200918 Termination date: 20210928 |
|
| CF01 | Termination of patent right due to non-payment of annual fee |