CN106572886B - 用于切割毛发的设备 - Google Patents
用于切割毛发的设备 Download PDFInfo
- Publication number
- CN106572886B CN106572886B CN201580041104.XA CN201580041104A CN106572886B CN 106572886 B CN106572886 B CN 106572886B CN 201580041104 A CN201580041104 A CN 201580041104A CN 106572886 B CN106572886 B CN 106572886B
- Authority
- CN
- China
- Prior art keywords
- cutting
- laser beam
- skin
- hair
- controller
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 210000004209 hair Anatomy 0.000 title claims abstract description 113
- 230000003287 optical effect Effects 0.000 claims abstract description 67
- 238000000034 method Methods 0.000 claims abstract description 16
- 238000004590 computer program Methods 0.000 claims abstract description 4
- 238000003384 imaging method Methods 0.000 claims description 68
- 238000001514 detection method Methods 0.000 description 9
- 238000010586 diagram Methods 0.000 description 7
- 230000009471 action Effects 0.000 description 5
- 230000008569 process Effects 0.000 description 5
- 230000004044 response Effects 0.000 description 5
- 206010040880 Skin irritation Diseases 0.000 description 4
- 230000008859 change Effects 0.000 description 4
- 230000008901 benefit Effects 0.000 description 3
- 230000006378 damage Effects 0.000 description 3
- 230000007794 irritation Effects 0.000 description 3
- 238000012634 optical imaging Methods 0.000 description 3
- 230000036556 skin irritation Effects 0.000 description 3
- 231100000475 skin irritation Toxicity 0.000 description 3
- 230000001419 dependent effect Effects 0.000 description 2
- 238000005259 measurement Methods 0.000 description 2
- 230000015556 catabolic process Effects 0.000 description 1
- 230000006870 function Effects 0.000 description 1
- 230000003993 interaction Effects 0.000 description 1
- 238000000691 measurement method Methods 0.000 description 1
- 230000007935 neutral effect Effects 0.000 description 1
- 230000005855 radiation Effects 0.000 description 1
- 230000035939 shock Effects 0.000 description 1
- 230000037380 skin damage Effects 0.000 description 1
- 239000007787 solid Substances 0.000 description 1
Images










Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B18/18—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by applying electromagnetic radiation, e.g. microwaves
- A61B18/20—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by applying electromagnetic radiation, e.g. microwaves using laser
- A61B18/203—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body by applying electromagnetic radiation, e.g. microwaves using laser applying laser energy to the outside of the body
-
- A—HUMAN NECESSITIES
- A45—HAND OR TRAVELLING ARTICLES
- A45D—HAIRDRESSING OR SHAVING EQUIPMENT; EQUIPMENT FOR COSMETICS OR COSMETIC TREATMENTS, e.g. FOR MANICURING OR PEDICURING
- A45D7/00—Processes of waving, straightening or curling hair
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B26—HAND CUTTING TOOLS; CUTTING; SEVERING
- B26B—HAND-HELD CUTTING TOOLS NOT OTHERWISE PROVIDED FOR
- B26B19/00—Clippers or shavers operating with a plurality of cutting edges, e.g. hair clippers, dry shavers
- B26B19/38—Details of, or accessories for, hair clippers, or dry shavers, e.g. housings, casings, grips, guards
- B26B19/3873—Electric features; Charging; Computing devices
- B26B19/388—Sensors; Control
-
- A—HUMAN NECESSITIES
- A45—HAND OR TRAVELLING ARTICLES
- A45D—HAIRDRESSING OR SHAVING EQUIPMENT; EQUIPMENT FOR COSMETICS OR COSMETIC TREATMENTS, e.g. FOR MANICURING OR PEDICURING
- A45D7/00—Processes of waving, straightening or curling hair
- A45D2007/007—Processes of trimming or cutting hair for hairdressing purposes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00315—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body for treatment of particular body parts
- A61B2018/00452—Skin
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00315—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body for treatment of particular body parts
- A61B2018/00452—Skin
- A61B2018/00476—Hair follicles
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00636—Sensing and controlling the application of energy
- A61B2018/00696—Controlled or regulated parameters
- A61B2018/00702—Power or energy
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B18/00—Surgical instruments, devices or methods for transferring non-mechanical forms of energy to or from the body
- A61B2018/00636—Sensing and controlling the application of energy
- A61B2018/00773—Sensed parameters
- A61B2018/00779—Power or energy
- A61B2018/00785—Reflected power
Abstract
本申请涉及一种用于切割毛发的设备(10)。设备(10)具有:皮肤接触面(13),被配置为在使用期间抵靠用户的皮肤(16)的表面放置;以及光学系统(20),被配置为横跨切割区(15)引导与所述皮肤接触面(13)平行且隔开的切割激光束(18),以切割延伸到切割区(15)中的毛发(17)。该设备还具有检测器(40)和控制器(27),检测器被配置为生成指示代表切割区(15)中的毛发(17)和/或皮肤(16)的一个或多个对象的存在的信息。控制器(27)能够确定代表切割区(15)中的毛发(17)和/或皮肤(16)的一个或多个对象的存在,并且根据检测器(40)生成的信息调整光学系统(20)的一个或多个特性。本发明还涉及一种切割毛发的方法以及一种计算机程序,其包括当被至少一个处理器执行时使该方法被执行的指令。
Description
技术领域
本发明涉及一种使用激光束切割毛发的设备。本发明还涉及一种切割毛发的方法以及一种计算机程序,该计算机程序包括指令,该指令当被至少一个处理器执行时使得执行该方法。
背景技术
已知使用激光束切断毛发是机械切割刀片的配置的可替换方式。暴露于激光束的毛发将吸收来自激光束的能量,并且它们将被汽化或通过激光引发的光学击穿和所得到的冲击波来切断。激光束不要求移动部件,并且因此消除了切割元件磨损或变钝的问题。此外,使用激光束切断毛发避免了由接触皮肤的机械刀片的锋利边缘所引起的皮肤刺激。已知WO 1992/16,338和US 5,993,440提供了一种设备,其包括激光二极管和反射元件,反射元件引导激光束横跨切割区,使得在使用期间束基本与用户皮肤的表面平行且与用户皮肤的表面隔开。以这种方式,随着设备跨皮肤移动,进入切割区的毛发被暴露于激光束并在激光束与毛发之间的交互点处切断。WO 2013/175355 A1公开了一种包括光学系统的激光剃刀,该光学系统引导激光束与皮肤平行以随着剃刀在皮肤上方移动而切割毛发。
通常通过两个标准来测量剃毛性能—剃毛的贴合性和皮肤的刺激性。切割高度是皮肤表面与切割毛发的点之间的距离。良好性能的剃刀应该使得切割高度最小化,并且因此通过尽可能贴近皮肤切割毛发而使得剩余毛发的长度最小。然而,将激光束定位得接近皮肤可能会在来自激光束的热量和能量入射到皮肤上时引起皮肤刺激。因此,需要保护皮肤免受激光束的影响,以避免对皮肤的损伤或刺激。
发明内容
本发明的目的在于提供一种用于使用激光束切割毛发的设备和/或一种切割毛发的方法,其基本缓解或克服了上述问题。
通过独立权利要求来限定本发明;从属权利要求限定有利的实施例。
根据本发明的一个方面,提供了一种切割毛发的设备,包括:皮肤接触面,被布置为在使用期间抵靠用户的皮肤表面放置;光学系统,被配置为引导切割激光束横跨切割区与所述皮肤接触面平行且隔开,以切割延伸到切割区中的毛发;检测器,被配置为生成指示代表毛发和/或皮肤的一个或多个对象在切割区中的存在的信息;以及控制器,被配置为根据由检测器生成的信息,确定代表毛发和/或皮肤的一个或多个对象在切割区中的存在并且调整光学系统的一个或多个特性,其特征在于,控制器被配置为根据由检测器生成的信息生成指示切割区中代表毛发和皮肤的一个或多个对象与切割激光束之间的距离的信息,并且根据控制器生成的信息调整切割激光束的强度。
这意味着可以改变光学系统的光学特性而不提供任何附加的部件。因此,可以使得光学系统的可靠性最大化,并因此使系统的可靠性最大化。
控制器可以被配置为根据代表切割区中的皮肤的一个或多个对象的存在的确定减小切割激光束的强度。
因此,设备可以简化操作以防止在足以切割毛发的强度下操作的切割激光束入射到皮肤。
控制器可以被配置为根据代表切割区中毛发的一个或多个对象的存在的确定增加切割激光束的强度。
通过这种布置,当在切割区中没有检测到毛发时,可以通过在降低的强度水平下操作切割激光束来使得设备的效率最大化。
控制器可以被额外地配置为调整切割激光束的路径。
因此,可以补偿切割激光束的路径中的任何偏差。
根据本发明的另一方面,提供了一种用于切割毛发的设备,包括:皮肤接触面,被布置为在使用期间抵靠用户的皮肤的表面放置;光学系统,被配置为跨切割区引导与所述皮肤接触面平行且隔开的切割激光束,以切割延伸到所述切割区中的毛发;检测器,被配置为生成指示代表所述切割区中的毛发和/或皮肤的一个或多个对象的存在的信息;以及控制器,被配置为根据所述检测器生成的信息,确定代表所述切割区中的毛发和/或皮肤的一个或多个对象的存在并且调整所述光学系统的一个或多个特性,其特征在于,所述控制器被配置为根据由所述检测器生成的信息生成指示代表所述切割区中的毛发和皮肤的一个或多个对象与所述切割激光束之间的距离的信息,并且根据所述控制器生成的信息调整所述切割激光束的路径。
同样地,这由此使得对切割激光束的路径中的任何偏差进行补偿成为可能。
通过上述布置,可以根据切割区中毛发和/或皮肤的检测来改变光学系统的一个或多个特性。因此,可以限制切割激光束以免引起对皮肤的损伤或刺激。此外,可以使得设备的效率最大化。
检测器可以包括成像传感器,其被配置为生成指示在横跨切割区引导的光源的路径中接收的代表毛发和/或皮肤的一个或多个对象的存在的信息。
通过这种布置,可以直接地确定切割区中对象的存在。因此,可以使检测器的精度最大化。
光源可以是激光束。
光源可以是切割激光束。光源可以是切割激光束的辅助部分。
因此,可以使用切割激光束,从而还提供用于成像传感器的光源。这意味着设备的复杂度最小,使得可以最大化可靠性。
控制器可以被配置为根据检测器生成的信息生成指示切割激光束与参考位置之间的距离的信息。
通过这种布置,可以通过确定切割激光束与切割区中的对象的位置来补偿切割激光束的路径中的任何偏差。
检测器可以包括距离传感器,其被配置为生成指示在切割区和参考位置中接收的代表毛发和/或皮肤的一个或多个对象之间的距离的信息。
通过这种布置,可以基于皮肤的高度确定皮肤何时进入切割区,使得对皮肤的损伤或刺激最小化。
控制器可以被配置为确定代表切割区中的毛发和皮肤的一个或多个对象的存在,并且当确定代表切割区中的毛发的所述一个或多个对象时,则忽视代表切割区中的毛发的一个或多个对象的存在。
通过这种布置,可以通过忽视由从皮肤延伸的毛发生成的误报,精确地确定切割区中皮肤的存在。这帮助产生更贴近的剃毛。
控制器可以被配置为调整光学系统以修改切割激光束的路径和皮肤接触面之间的距离。
根据本发明的另一方面,提供了一种切割毛发的方法,包括:引导切割激光束横跨切割区与所述皮肤接触面平行并与之隔开,以使用光学系统切割延伸到切割区中的毛发;使用检测器生成指示代表切割区中的毛发和/或皮肤的一个或多个对象的存在的信息;根据检测器生成的信息,确定代表切割区中的毛发和/或皮肤的一个或多个对象的存在并且调整光学系统的一个或多个特性;以及使用控制器来根据检测器生成的信息生成指示代表切割区中的毛发和皮肤的一个或多个对象与切割激光束之间的距离的信息,并且根据控制器生成的信息调整切割激光束的强度。
根据本发明的另一方面,提供了一种切割毛发的方法,包括:使用光学系统,跨切割区引导与所述皮肤接触面平行且隔开的切割激光束,以切割延伸到所述切割区中的毛发;使用检测器生成指示代表所述切割区中的毛发和/或皮肤的一个或多个对象的存在的信息;根据由所述检测器生成的信息,确定代表所述切割区中的毛发和/或皮肤的一个或多个对象的存在并且调整所述光学系统的一个或多个特性,以及使用控制器,根据由所述检测器生成的信息生成指示代表所述切割区中的毛发和皮肤的一个或多个对象与所述切割激光束之间的距离的信息,并且根据所述控制器生成的信息调整所述切割激光束的路径。
根据本发明的另一方面,提供了一种计算机程序,其包括当被至少一个处理器执行时导致上述方法被执行的指令。
本发明的这些和其他方面将参照下面描述的实施例而变得显而易见并且得以阐述。
附图说明
现在参照附图仅通过示例描述本发明的实施例,其中:
图1示出了用于使用激光束切割毛发的设备的切割端的示图;
图2示出了图1的设备的切割端的前视示意图;
图3示出了图2所示设备的实施例的示意性电路框图;
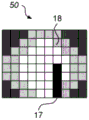
图4示出了指示由图1的设备的成像传感器生成的激光束轮廓(profile)的信息的说明性示图,其显示了毛发;
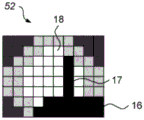
图5示出了指示由图1的设备的成像传感器生成的激光束轮廓的信息的说明性示图,其显示了毛发和皮肤;
图6示出了由设备中的控制器执行的例程的流程图;
图7示出了图1的设备的切割端的又一实施例的前视示意图;
图8示出了图7所示设备的实施例的示意性电路框图;
图9示出了由图7的设备的实施例的距离传感器生成的信息的说明性图表;
图10示出了图1的设备的切割端的不同实施例的前视示意图;
图11示出了图1的设备的切割端的不同实施例的前视示意图;以及
图12示出了图10所示设备的实施例的示意性电路框图。
具体实施方式
具体参照图1至图3,示出了用于切割毛发的设备10。设备10包括主体12,其包括具有开口14的皮肤接触面13。如图2所示,在使用期间,主体12的皮肤接触面13抵靠用户的皮肤16放置,并且皮肤16上的毛发17突出到主体12的开口14中以及其中限定的切割区15中。在主体12内,设备10包括光学系统20,其引导切割激光束18横跨切割区15,使得切割激光束18与皮肤接触面13平行且隔开。切割激光束18还横跨主体12的开口14延伸。以这种方式,当主体12的皮肤接触面13抵靠用户的皮肤16放置时,切割激光束18基本与用户的皮肤16的表面平行且隔开,并且横跨切割区15提供了基本均匀的切割高度。在图2中指示为距离H1的皮肤16的表面与切割区15中的切割激光束18之间的距离为切割高度。
光学系统20包括位于开口14和切割区15的一侧的第一反射元件21。第一反射元件21被配置为在设备10的端部处跨开口14反射切割激光束18的入射部分22。也就是说,第一反射元件21被配置为反射切割激光束18的入射部分22横跨切割区15,使得切割激光束18跟随基本与皮肤接触面13和设备10的开口14平行且隔开的路径。
在切割区15与第一反射元件21相反的一侧上,定位第二反射元件23以反射切割激光束18远离切割区25朝向能量耗散器(未示出),使得切割激光束18的“被使用”部分24被耗散并且不能过与用户的部分或设备的另一部分相互作用。在图2所示的示例中,入射到第一反射元件21上的切割激光束的入射部分22垂直于主体12的皮肤接触面13,并且第一反射元件21以90度反射激光束,使其与主体12的皮肤接触面13平行。类似地,第二反射元件23被配置为将切割激光束18反射90度,并且垂直地远离切割区15。然而,应该理解,根据光学系统的其他部分(诸如激光束发生器25和能量耗散器(未示出))的位置和定向,第一和第二反射元件21、23可以不同地定向或者具有不同的反射角度。此外,应该理解,第一和第二元件21、23可以不位于切割区15的侧面。根据光学系统20的其他部件的位置、定向和结构,它们可以可选地位于切割区15内的任何位置。可以省略第一和/或第二反射元件21、23。然而,切割区15内的切割激光束18应该保持与皮肤接触面13和主体12的开口14平行,使得皮肤接触面13与切割激光束18之间的距离在整个切割区15上是恒定的。本文描述的任何反射元件可以包括反射镜或棱镜或者任何其他光学反射表面。
设备10的光学系统20还包括激光束发生器25,诸如二极管。如图2所示,光学系统20包括透镜装置32。透镜装置32包括一个或多个透镜元件。在本实施例中,透镜装置32包括准直透镜33和聚焦透镜34。由激光束发生器25发射的激光束被引导朝向准直透镜33。准直透镜33减小或消除由激光束发生器25发射的激光束的发散。然后,通过聚焦透镜34聚焦激光束的准直部分或路径以使得激光束汇聚。
设备10还包括控制器27。控制器27被配置为控制激光束发生器25的操作,从而控制切割激光束18的操作。参照图3,控制器27包括处理器28和存储器29。控制器27可操作用于操作光学系统20。
处理器28可以采用任何适当的形式。例如,处理器28可以是或者包括微控制器、多个微控制器、电路、单个处理器或多个处理器。控制器27可以由一个或多个模块形成。
存储器29采用任何适当的形式。存储器29可以包括非易失性存储器和/或RAM。非易失性存储器可以包括只读存储器(ROM)、硬盘驱动器(HDD)或固态驱动器(SSD)。其中,存储器尤其存储操作系统。存储器可以远程设置。RAM被处理器28用于临时存储数据。操作系统可以包含代码,该代码被控制器27执行时控制设备10的每个硬件部件的操作,或者可替换地控制包括设备10的系统。控制器28可能够使得一个或多个对象(诸如一个或多个轮廓)被存储器29远程或本地地存储。控制器27可能够参照由非易失性存储器存储的一个或多个对象(诸如一个或多个轮廓)并且将一个或多个存储的对象上传到RAM。
控制器27能够进行操作以响应于输入(诸如用户输入30)来操作设备10。控制器27被配置为操作光学系统20。
用户输入30包括一些形式的用户接口。可选地,设备10包括用于调整设备的一些操作特性(诸如功率)的控件和/或显示器。用户输入20允许用户操作设备10,例如接通和断开设备10。用户输入30例如可以是按钮、触摸屏或开关。
设备10可包括的其他部件(未示出)包括其他光学部件(诸如过滤器或窗口)以限制设备10中的碎屑的通过。设备操作所需的其他部件、诸如电池或者与外部电缆(未示出)的连接还可以位于主体12内。此外,设备10的主体12还可以包括操作设备所需的把手和任何开关、按钮或其他控件和显示器,它们可以形成用户输入30。
切割区15形成在主体2的室35中。通过到室35的开口来限定到切割区15的开口14。
设备10设置有成像传感器40。成像传感器40是电子传感器,其被配置为生成指示在成像传感器40处引导的光源的一个或多个光学特性的信息。成像传感器40被配置为生成指示成像传感器40处的光源强度轮廓的信息。在本实施例中,当操作光学系统20时,光源是切割激光束18。信息被提供给控制器27。然后,控制器27根据成像传感器40提供的信息控制光学系统20的一个或多个部件的操作。
成像传感器40是光学成像传感器。在本实施例中,成像传感器40多元件光学成像传感器。光学成像传感器可以是光电二极管阵列。成像传感器40设置在切割激光束18的光学路径的端部处。在本实施例中,成像传感器40位于能量耗散器(未示出)处。然而,应该理解,可以使用可替换的传感器装置。
成像传感器40被配置为检测切割激光束18的一个或多个光学特性。在成像传感器40之前,检测器透镜41被设置在切割激光束路径上,以调整切割激光束18的尺寸来适应成像传感器40。例如,检测器透镜41可以被配置为确保成像传感器40处的切割激光束18的尺寸对应于成像传感器40的分辨率。可以省略检测器透镜41。
成像传感器40与切割激光束18的路径相交。成像传感器40被配置为确定切割激光束18在成像传感器40处的强度。在这种布置中,成像传感器40位于切割激光束18的路径的端部处。
成像传感器40被配置为生成指示切割激光束18的强度的信息。成像传感器40被配置为生成指示切割激光束18的不同区域的强度的信息。成像传感器40在本实施例中具有多元件阵列,因此每个元件能够提供指示切割激光束18与元件相交的区域的强度的信息。成像传感器40能够生成提供指示与成像传感器40相交的光源的不同区域的强度的信息的轮廓(profile)。在图4中说明性地示出了这种轮廓。在图4中,示出了轮廓50,其指示仅在用作光源的切割激光束18的路径中接收到毛发17。在图5中,示出了轮廓52,其指示在用作光源的切割激光束18的路径中接收到毛发17和皮肤16。
控制器27被配置为参考由成像传感器40生成的信息,该信息指示切割激光束18在成像传感器40处的强度轮廓。基于提供给控制器27的信息,控制器27被配置为确定在切割激光束18的路径中接收的一个或多个对象的存在。被引导到成像传感器40的光源的路径中所接收的任何对象将用于限制光在成像传感器40的至少一部分上撞击成像传感器40。即,该对象或每一个对象都将创建阴影。在图4中的强度轮廓中示出了对象的这种阴影。因此,控制器27能够确定是否在光源的路径中接收到对象,并且识别在光源的路径中接收的对象的类型。
控制器27被配置为基于成像传感器40生成的信息识别在切割激光束18的路径中接收的对象的类型。控制器27被配置为参考由提供轮廓的成像传感器20输出的一个或多个帧。基于成像传感器40生成的信息,控制器27被配置为使用对象识别来确定对象的类型。这可以通过与存储器29存储的参考简档的比较来进行。这种对象识别是已知的,因此这里省略详细描述。
基于由控制器27提供的对象识别,控制器27被配置为确定在切割激光束18的路径中接收的对象或(多个)对象的类型。控制器27被配置为识别何时在切割激光束18的路径中接收到对象。控制器27被配置为基于成像传感器40生成的信息,根据所确定的切割激光束18的路径中对象的识别来调整切割激光束18的强度。
在使用期间,在切割激光束18的路径中接收毛发17。将理解,切割激光器18的强度将在其截面轮廓中改变,因此将具有朝向其外边缘的更低的强度。因此,对于成像传感器40所识别的对象,切割激光束18有可能不在其上施加切割动作。切割激光束18的切割边缘被限定为切割激光束18的外围,其具有足以在期望的毛发类型上提供切割动作的激光器强度。在本实施例中,切割激光束18的切割边缘被限定为包含99%的激光器强度的切割激光束18的外围,然而应该理解,在可替换的实施例中,百分比可以不同。
还可以在切割激光束18的路径中接收到皮肤16(参照图5)。切割区15处的切割激光束18与皮肤16之间的距离可以响应于切割区15内用户的皮肤16的高度的变化而改变,例如由于皮肤高度变化和切割区15中的皮肤凸起。因此,皮肤16可以在设备10的使用期间移动得更接近或远离切割激光束18。控制器27被配置为通过参考成像传感器40生成的信息确定在切割激光束18的路径中何时接收到对象。
控制器27被配置为基于成像传感器40生成的信息识别在切割激光束18的路径中接收的对象的类型。控制器27可以参考由存储器29存储的参考简档。当控制器27识别对象为皮肤时,控制器27被配置为减小切割激光束18的强度,例如激光束的功率或能量。因此,施加于皮肤的激光能量的量被最小化或者被阻止。以这种方式,可以适应皮肤高度(诸如皮肤轮廓)的变化,同时使得皮肤刺激最小化。在本实施例中,控制器27被配置为通过忽视指示切割区15中的毛发17的信息来确定切割高度,其是切割激光束18的切割边缘与皮肤16之间的距离。这意味着可以仅基于指示皮肤的信息来确定切割高度的精确确定。
在本实施例中,控制器27操作激光束发生器25来在两个不同的激光束强度水平下产生切割激光束18。对于第一激光束强度水平,切割激光束18的期望强度小于引起皮肤损伤所要求的强度。即,对皮肤安全的强度检测水平。对于第二激光束强度水平,切割激光束18的期望强度等于或大于对毛发引发切割动作所要求的强度。激光束强度水平可以被存储器28存储并且被控制器27参考。
图6示出了由控制器27执行的操作切割激光束的处理。在步骤600中,在第一激光束强度水平下操作切割激光束18。
在步骤601中,由成像传感器40生成的指示用作光源的切割激光束18的路径中一个或多个对象的存在的信息被控制器27参考。在步骤602中测试一个或多个对象的存在。如果控制器27确定在用作光源的切割激光束18的路径中不存在对象,则重复该例程。
如果控制器27确定在用作光源的切割激光束18的路径中存在对象,则在步骤603中,控制器27基于对象识别处理确定对象的类型。在步骤604中测试对象类型的确定。如果基于所生成的信息由控制器27识别到皮肤的存在,则重复处理,并且在第一激光束强度水平下保持切割激光束18的操作。如果通过控制器27没有识别皮肤的存在,则重复处理直到不确定皮肤的存在为止。在未识别到皮肤且因此通过控制器识别到毛发的存在的情况下,在步骤605中,以第二激光束强度水平操作切割激光束。重复该处理,直到对象没有被检测到或者皮肤的存在被确定,在后者情况下,在第一激光束强度水平下操作切割激光束。
指示用于给定切割高度的期望强度的信息被存储在存储器29中的参考简档(profile)中。控制器27被配置为响应于指示切割区15处的切割激光束18的下部边缘与皮肤16之间的距离的信息,参考期望强度的参考简档。参考简档可存储在查找表中。可以通过存储器29存储参考简档。在这种布置中,控制器27被配置为参考存储器29,以访问参考简档。在一个实施例中,通过RAM存储参考简档。参考简档提供指示期望强度的信息。
将理解,控制器27被配置为从两个或多个参考简档中选择参考简档。即,每个参考简档都可以提供基于确定的切割高度的期望操作强度。两个或多个参考简档可存储在存储器29中。可替换地,参考简档可以包括两个或多个期望强度水平,控制器27能够基于确定的切割高度从中进行选择。用户可以能够选择剃毛的期望贴合度。例如,在参考简档包括两个或多个期望强度水平(控制器27能够基于确定的切割高度从中进行选择)的实施例中,用户可以能够针对给定的切割高度从两个或多个参考简档(每一个都具有不同的强度水平)中进行选择。
当操作设备10时,控制器27被配置为操作激光束发生器25,以通过参考成像传感器40生成的信息根据由控制器27确定的切割高度调整切割激光束18的强度。
在一个实施例中,控制器27能够操作以根据由成像传感器40生成的信息所确定的切割高度的最小阈值调整切割激光束18的强度。在这种实施例中,控制器27能够操作以操作激光束发生器25,使得当切割高度被确定为小于或等于最小阈值时,切割激光束18在第一强度水平下进行操作,并且控制器27能够操作用于操作激光束发生器25,使得当切割高度大于最小阈值时,切割激光束18在第二强度水平下进行操作。通过一个或多个参考简档来存储最小阈值。通过这种布置,控制器27被配置为制定切割激光束18的强度水平的阶梯变化。
在可替换实施例中,参考简档可以包括用于切割高度的一个或多个阈值,该一个或多个阈值由控制器27基于成像传感器40提供的信息来确定。在这种实施例中,每个阈值都具有对应的强度水平。两个或多个阈值以及对应的强度水平可以由参考简档来存储。在另一可替换方式中,控制器27被配置为通过操作激光束发生器25来确定用于切割激光束18的期望强度水平,从而基于成像传感器40提供的信息来不断地改变强度水平。
尽管在上述实施例中,当在切割激光束18的路径中没有检测到对象的存在时控制器27被配置为初始在第一强度水平(即,对皮肤安全的检测水平)下操作切割激光束18,但应该理解,在可替换实施例中,切割激光束18被配置为初始地以第二激光束强度水平进行操作,该第二激光束强度水平是等于或大于对毛发17的切割动作所需的强度的水平。
在这种实施例中,在使用期间,切割激光束18初始在第二激光束强度水平下进行操作。如果控制器27根据由成像传感器49提供的信息确定仅毛发在切割激光束18的路径中,则控制器27被配置为保持切割激光束18的强度水平等于或大于对毛发17引起切割动作所要求的强度。如果控制器27根据由成像传感器40提供的信息确定皮肤16在切割激光束18的路径中,则控制器27被配置为减小切割激光束18的强度水平,从而在第一激光束强度水平下进行操作。
在上述实施例中,切割激光束18入射到成像传感器40,并且强度轮廓50、52用于确定切割激光束18的路径中一个或多个对象的存在。然而,在又一实施例中,将理解,还可以确定切割激光束18的相对位置。在这种实施例中,切割激光束18入射到成像传感器40,并且控制器27被配置为基于由成像传感器40生成的信息确定切割激光束18的路径。即,控制器27被配置为还确定切割激光束18的切割边缘在成像传感器40上的位置。由于确定了切割激光束18的切割边缘在成像传感器40上的位置以及一个或多个对象的位置,将理解,控制器27能够补偿位置中的任何移动或差异,并因此补偿切割区15中的切割激光束18的路径。
由于控制器27能够确定切割激光束18在切割区15中以及皮肤16在切割区15中的位置,控制器27能够精确地确定切割激光束18的切割边缘与皮肤16之间的距离。这还能够使得在使用期间或者使用之间的任何变化被考虑。通过这种布置,可以考虑光学元件对准变化。这种光学元件对准变化例如可以由于用户掉落设备10而发生。
在上述实施例中,切割激光束18用作作用于成像传感器40的光源。然而,将理解,设想地到可替换实施例。例如,在一个实施例中,切割激光束被分裂成主切割束18和辅助检测束(未示出)。可替换地,辅助检测束是独立的光源,例如独立的激光束。在这种实施例中,主切割束和辅助检测束跟随横跨切割区15的路径。辅助检测束与主切割束18平行延伸。辅助检测束入射到成像传感器40。通过这种布置,在设备10的所有操作中,可以在对皮肤安全的强度水平下连续地保持辅助检测束的强度。
尽管在上述实施例中,成像传感器40被配置为用作皮肤存在检测器,但将理解,在可替换实施例中,可以使用不同类型的皮肤存在检测器。现在参照图7和图8,示出了用于切割毛发的设备10的可替换实施例。图7和图8所示的设备10通常与上述设备相同,因此将省略详细描述。将保持参考符号,并且参考在上面详细描述的特征和部件。然而,在该实施例中,皮肤存在检测器是距离传感器42。
距离传感器42是电子传感器,其被配置为当设备1抵靠皮肤16定位时生成指示切割区15处的皮肤16与参考位置之间的距离的信息。该距离是皮肤高度。该信息被提供给控制激光发生器25的操作的控制器27。距离传感器42是光学传感器,诸如共焦透镜,其使用光学测量技术并且不需要接触皮肤16来测量皮肤16的表面与设备10上的参考位置之间的距离。距离传感器42可以被配置为例如通过三角测量、散射光测量和/或阴影测量生成指示皮肤16的位置的信息。在本实施例中,参考位置基于皮肤接触面13。因此,所提供的指示切割区15处的皮肤16与所述参考位置之间的距离的信息是由距离传感器42确定的切割区15处的皮肤与皮肤接触面13的平面之间的垂直距离。然而,将理解,可以使用可替换的参考位置。例如,参考位置可以是切割激光束18的中立校准位置。可以根据参考位置来计算切割高度,即是皮肤16的表面与切割区15中的切割激光束18之间的距离。
距离传感器42设置在切割区15中。即,距离传感器42设置在主体12的室35中。距离传感器42是非接触皮肤距离传感器。即,当设备1抵靠皮肤16定位时,距离传感器42被配置为测量切割区15处的皮肤16与参考位置之间的距离。距离传感器42可以是反射型或透射型光学传感器。距离传感器42可以使用可见光和/或近红外辐射区域中的光的一个或多个波长。然而,将理解,可以使用可替换的传感器布置。距离传感器42被配置为确定沿着切割激光束18的传播方向的参考位置和切割区15处的皮肤16之间的距离。即,沿着切割区15的长度。
距离传感器42被配置为确定指示在切割激光束18的入射部分22的传播方向上横跨切割区15的长度的对象(诸如切割区15中的毛发和/或皮肤)的存在和与对象的距离的信息。参照图9,通过轴901来表示传播方向。通过轴900来表示对象的高度。距离传感器42被配置为提供指示沿着切割激光束18的入射部分22的传播方向的对象的高度的信息,如图9中的线902所示。将理解,峰值903代表切割区15中的毛发17,线902的剩余部分代表皮肤16。将理解,切割设备10被配置为在垂直于切割激光束18的入射部分22的传播方向的方向上沿着皮肤16移动。
控制器27被配置为参考由距离传感器42生成的指示切割区15中的一个或多个对象(诸如毛发17和皮肤16)的高度的信息。控制器27被配置为将信息划分为离散的仓(bin)904,该仓代表沿着切割激光束18的入射部分22的传播方向的切割区15的分段。即,切割区15被名义上划分为离散的仓904的阵列。每个仓903都被配置为表示大于毛发宽度的距离。
基于由距离传感器42为每个仓904生成的信息,为每个仓904设置最小高度,即对象或每个对象突出到切割区的最小距离。在图9中,对每个仓904由虚线905表示最小高度。控制器27被配置为基于最小高度确定用于每个仓904的皮肤的位置。因此,将忽视代表毛发的峰值903。基于为每个仓904确定的最小高度,控制器27被配置为确定切割高度。切割高度被确定为横跨仓904的阵列的皮肤的最小高度中的最大值。
指示针对给定切割高度的期望强度的信息以参考简档存储在存储器29中。控制器27被配置为响应于指示切割激光束18的下部边缘与切割区15处的皮肤16之间的距离的信息参考期望强度的参考简档,该距离通过参考用于每个仓904的最小高度确定。因此,可以忽视基于毛发17的误报。参考简档可存储在查找表中。参考简档可以被存储器29存储。在这种布置中,控制器27被配置为参考存储器29以访问参考简档。在一个实施例中,参考简档被RAM存储。参考简档提供指示期望强度的信息。
将理解,控制器27可以被配置为从两个或多个参考简档中选择参考简档。即,每个参考简档都可以基于确定的切割高度提供期望的操作强度。两个或多个参考简档可以存储在存储器29中。可替换地,参考简档可以包括两个或多个期望的强度水平,控制器27能够基于确定的切割高度从中进行选择。用户能够选择剃毛的期望贴合度。例如,在参考简档包括两个或多个期望的强度水平(控制器27能够基于确定的切割高度从中进行选择)的实施例中,用户可以能够针对给定的切割高度从两个或多个参考简档(每一个都具有不同的强度水平)中选择。
当操作设备10时,控制器27被配置为根据切割高度来操作激光束发生器25,从而调整切割激光束18的强度,该切割高度由控制器27通过参考由距离传感器42为每个仓904生成的信息确定。
在一个实施例中,控制器27可操作以根据由距离传感器42生成的信息所确定的切割高度的最小阈值来调整切割激光束18的强度。在这种实施例中,控制器27可操作用于操作激光束发生器25,使得当切割高度大于最小阈值时切割激光束18在第二激光束强度水平下操作,并且控制器27可操作以操作激光束发生器25,使得当切割高度被确定为小于或等于最小阈值时切割激光束18在第一激光束强度水平下进行操作。通过一个或多个参考简档来存储最小阈值。通过这种布置,控制器27被配置为制定切割激光束18的强度水平中的阶梯变化。
在可替换实施例中,参考简档可以包括用于切割高度的一个或多个阈值,控制器27基于由距离传感器42提供的信息来确定阈值。在这种实施例中,每个阈值都具有对应的强度水平。两个或多个阈值以及对应的强度水平可以被参考简档存储。在另一可替换方式中,控制器27被配置为通过操作激光束发生器25以基于由距离传感器42提供的信息来不断地改变强度水平,来确定用于切割激光束18的期望强度水平。
尽管在本实施例布置中,距离传感器42被设置在切割区15中并且被配置为检测位于在通向切割区15的开口14处的皮肤16,但将理解,在可替换实施例中,距离传感器42可以设置在切割区15外。例如,距离传感器42可以设置为检测在与通向切割区15的开口14相邻的传感器开口(未示出)处的皮肤。距离传感器42设置在切割区15中的优势在于,能够更加精确地确定切割区15处的皮肤高度。
尽管在上述实施例中,使用成像传感器40或距离传感器42中的一个,但将理解,在可替换的实施例中,设备10设置有成像传感器40和距离传感器42。这种实施例在图9和图10中示出。成像传感器40和距离传感器42的布置通常与上述相同,因此将省略详细描述。在该实施例中,控制器27被配置为确定表示切割区中毛发和/或皮肤的一个或多个对象的存在,并且根据由成像传感器40和距离传感器42生成的信息来调整切割激光束18的操作。通过这种实施例,可以通过使得由毛发提供的误报的数量最小化而实现确定切割高度的精度的最大化。即,控制器27鉴于皮肤16上的毛发17所确定错误的切割高度。
已经发现对于所使用的检测器是成像传感器40的实施例,沿着皮肤16的表面、与切割激光束18的入射部分22的传播方向平行延伸的毛发17可以提供错误的切割高度,即误报。在这种实施例中,已经发现沿着传播方向基本与皮肤平行延伸的毛发将横跨成像传感器40的宽度生成阴影。因此,控制器27可能不正确地确定阴影代表皮肤16,使得不正确地确定切割高度。然而,在这种实施例中,沿着皮肤16的表面、垂直于切割激光束18的入射部分22的传播方向延伸的毛发17将不会引起该问题。
类似地,对于所使用的检测器是距离传感器42的实施例,已经发现沿着皮肤16的表面、在垂直于切割激光束18的入射部分22的传播方向的方向上延伸的毛发17可以提供不正确的切割高度,即误报。在这种实施例中,已经发现基本平行于皮肤但垂直于传播方向延伸的毛发将横跨至少一个仓904的全宽度生成延伸。因此,控制器27可能不正确地确定毛发代表仓904的最小高度,使得不正确地确定切割高度。然而,在这种实施例中,沿着皮肤16的表面、与切割激光束18的入射部分22的传播方向平行延伸的毛发17将不引起该问题,因为毛发17将不横跨仓904的全宽度延伸。因此,在具有成像传感器40和距离传感器42的检测器的实施例中,可以使控制器基于由成像传感器40和距离传感器42生成的信息来确定切割高度。这意味着可以使得不正确的切割高度的数量最小化。
尽管在上述实施例中,控制器27被配置为进行调整的光学系统的一个或多个特性是切割激光束18的强度,但将理解,在可替换的实施例中,可以调整光学系统的一个或多个特性。可以与切割激光束18的强度的调整一起或者作为切割激光束18的强度的调整的替代,调整光学系统的一个或多个其他特性。
现在参照图11和图12,示出了设备10的另一实施例。如图11和图12所示的设备10的该实施例的布置大致与上述实施例相同,所以这里将省略详细描述。然而,设备10的该实施例还包括致动器45,其被配置为作用于光学系统20的一个或多个光学部件。参考标号将被保持并且指代上面详细描述的特征和部件。
在图11和图12所示设备10的实施例中,致动器45被配置为作用于第一反射元件21。致动器45被配置为使第一反射元件21移动。致动器45被配置为引起第一反射元件21的旋转。第一反射元件21被配置为绕着垂直于切割激光束18的入射部分22的传播方向的旋转轴旋转。如前所解释的,第一反射元件21被定位为横跨切割区15反射切割激光束18的入射部分22。
致动器45是电子致动器,例如声音线圈致动器、具有齿轮的主轴电机或者压电平移器。致动器45响应于来自控制器27的命令作用于第一反射元件21。控制器27被配置为操作致动器45来控制横跨切割区15的切割激光束18的传播角度。即,第一反射元件21的移动允许横跨切割区15的切割激光束18的路径被调整,因此切割高度被调整。
控制器27被配置为操作致动器45以移动第一反射元件21。因此,在垂直于切割区15中的切割激光束18的传播方向的方向上改变切割激光束18的路径。控制器27被配置为参考由成像传感器40和/或距离传感器42生成的、指示代表切割区15中的毛发17和/或皮肤16的一个或多个对象的存在的一个或多个信息。因此,控制器27能够调整切割激光束18的路径,来防止切割激光束18入射到皮肤16上。
在致动器45被配置为作用于光学系统20的一个或多个光学部件的上述实施例中,致动器45被配置为引发的移动是旋转。特别地,在参照图11和图12描述的实施例中,致动器45被配置为作用于第一反射元件21,以引起第一反射元件21的旋转。然而,将理解,设想得到可替换的布置。
在实施例中,将理解,致动器45可以被配置为作用于光学系统20的一个或多个光学部件以引起光学系统20的一个或多个光学部件的平移。例如,在一个实施例中,致动器45被配置为作用于第一反射元件21以引起第一反射元件21的平移移动。平移移动可以是朝向和/或远离激光束发生器25的方向;即,垂直于横跨切割区15的切割激光束18的传播方向。将理解,第二反射元件23可以与第一反射元件21一起移动,或者其尺寸确定为允许第一反射元件21的移动。
在可替换的实施例中,第一反射元件21的平移移动可以在朝向和远离第二反射元件23的方向上;即,与横跨切割区15的切割激光束18的路径平行。
致动器45可以可替换地或者还作用于激光束发生器25以引起激光束发生器25本身的平移。在这种实施例中,致动器45被配置为作用于激光束发生器25以引起与横跨切割区15的切割激光束15的传播方向平行的平移移动。
致动器45可以可替换地或者还作用于透镜装置32。例如,致动器45可以作用于聚焦透镜34。致动器可以引起聚焦透镜34在垂直于经过透镜装置32的切割激光束18的光轴的方向上的平移移动。
例如,如果准直透镜33相对于激光器的离心被定义为Δ,则通过以下等式给出用于补偿的圆柱聚焦透镜的要求平移d:
d=-fyΔ
fc
其中,fc是准直透镜33的焦距,并且是圆柱聚焦透镜的焦距。
在上述每个实施例中,随着设备10在用户的皮肤16上移动,根据成像传感器40所检测的切割激光束18的一个或多个光学特性进行调整的光学系统20的一个或多个特性可以根据指示代表切割区15中毛发17和/或皮肤16的一个或多个对象的存在的具体生成信息而动态调整。该布置的优势在于,设备能够针对用户皮肤的每个部分动态地调整光学系统20的操作。
尽管在上述包括一个或多个光学部件的调整的实施例中,通过该光学部件或每个光学部件的定向的调整来实现每个光学部件的调整,但应该理解,在可替换的实施例中,通过具有可互换的光学部件来实现该光学部件或每个光学部件的调整。在一个实施例中,该制动器或每个致动器可进行操作来互换两个或多个光学部件。
将理解,术语“包括”不排除其他元件或步骤,并且不定冠词“一个”不排除多个。在相互不同的从属权利要求中引用特定措施的仅有事实并不指示这些措施的组合不可用于获利。权利要求中的任何参考符号不应解释为限制权利要求的范围。
尽管在本申请中权利要求已经被表述为特征的特定组合,但应该理解,本发明的公开范围还包括本文所明确或隐含公开的任何新颖特征或者本文所明确或隐含公开特征的任何新颖组合,或者它们的任何概括,无论其是否涉及任何权利要求中当前所要求的相同发明以及无论其是否减轻了母发明的任何或所有相同技术问题。申请人据此提示:在本申请的审查或从其衍生的任何进一步申请的审查过程中,可以将新权利要求表述为这些特征和/或特征的组合。
Claims (16)
1.一种用于切割毛发的设备(10),包括:
皮肤接触面(13),被布置为在使用期间抵靠用户的皮肤的表面放置;
光学系统(20),被配置为跨切割区(15)引导与所述皮肤接触面平行且隔开的切割激光束(18),以切割延伸到所述切割区中的毛发,
检测器(40、42),被配置为生成指示代表所述切割区中的毛发和/或皮肤的一个或多个对象的存在的信息;以及
控制器(27),被配置为根据所述检测器生成的信息,确定代表所述切割区中的毛发和/或皮肤的一个或多个对象的存在并且调整所述光学系统的一个或多个特性,
其特征在于,所述控制器(27)被配置为根据由所述检测器(40、42)生成的信息,来生成指示代表所述切割区(15)中的毛发和皮肤的所述一个或多个对象与所述切割激光束(18)之间的距离的信息,并且根据由所述控制器生成的信息调整所述切割激光束(18)的强度。
2.根据权利要求1所述的设备(10),其中,所述控制器(27)被配置为根据代表所述切割区(15)中的皮肤的一个或多个对象的存在的确定,来减小所述切割激光束(18)的强度。
3.根据权利要求1或权利要求2所述的设备(10),其中,所述控制器(27)被配置为根据代表所述切割区(15)中的毛发的一个或多个对象的存在的确定,来增加所述切割激光束(18)的强度。
4.根据权利要求1或权利要求2所述的设备(10),其中,所述控制器(27)被额外地配置为调整所述切割激光束(18)的路径。
5.根据权利要求1或权利要求2所述的设备(10),其中所述检测器(40)包括成像传感器,所述成像传感器被配置为生成指示代表在跨所述切割区(15)引导的光源(18)的路径中接收的毛发和/或皮肤的一个或多个对象的存在的信息。
6.根据权利要求4所述的设备(10),其中,所述控制器(27)被配置为调整所述光学系统(20),以修改所述切割激光束(18)的路径与所述皮肤接触面(13)之间的距离。
7.一种用于切割毛发的设备(10),包括:
皮肤接触面(13),被布置为在使用期间抵靠用户的皮肤的表面放置;
光学系统(20),被配置为跨切割区(15)引导与所述皮肤接触面平行且隔开的切割激光束(18),以切割延伸到所述切割区中的毛发,
检测器(40),被配置为生成指示代表所述切割区中的毛发和/或皮肤的一个或多个对象的存在的信息;以及
控制器(27),被配置为根据所述检测器生成的信息,确定代表所述切割区中的毛发和/或皮肤的一个或多个对象的存在并且调整所述光学系统的一个或多个特性,
其特征在于,所述控制器(27)被配置为根据由所述检测器(40、42)生成的信息生成指示代表所述切割区(15)中的毛发和皮肤的一个或多个对象与所述切割激光束(18)之间的距离的信息,并且根据所述控制器生成的信息调整所述切割激光束(18)的路径;并且其特征还在于
所述检测器(40)包括成像传感器,所述成像传感器被配置为生成指示代表在跨所述切割区(15)引导的光源(18)的路径中接收的毛发和/或皮肤的一个或多个对象的存在的信息。
8.根据权利要求7所述的设备(10),其中,所述光源(18)是激光束。
9.根据权利要求8所述的设备(10),其中,所述光源(18)是所述切割激光束。
10.根据权利要求9所述的设备(10),其中,所述控制器(27)被配置为根据所述检测器生成的信息,来生成指示所述切割激光束(18)与参考位置之间的距离的信息。
11.根据权利要求1-2和7-10中任一项所述的设备(10),其中,所述检测器(42)包括距离传感器,所述距离传感器被配置为生成指示代表所述切割区(15)中接收的毛发和/或皮肤的一个或多个对象与参考位置之间的距离的信息。
12.根据权利要求1-2和7-10中任一项所述的设备(10),其中,所述控制器(27)被配置为确定代表所述切割区(15)中的毛发和皮肤的一个或多个对象的存在,并且当确定代表所述切割区中的毛发的一个或多个对象时,忽略代表所述切割区中的毛发的所述一个或多个对象的存在。
13.根据权利要求7-10中的任一项所述的设备(10),其中,所述控制器(27)被配置为调整所述光学系统(20),以修改所述切割激光束(18)的路径与所述皮肤接触面(13)之间的距离。
14.一种切割毛发的方法,包括:
使用光学系统(20),跨切割区(15)引导与皮肤接触面(13)平行且隔开的切割激光束(18),以切割延伸到所述切割区中的毛发,
使用检测器(40、42)生成指示代表所述切割区中的毛发和/或皮肤的一个或多个对象的存在的信息,
根据由所述检测器生成的信息,确定代表所述切割区中的毛发和/或皮肤的一个或多个对象的存在并且调整所述光学系统的一个或多个特性,以及
使用控制器(27),根据由所述检测器生成的信息,来生成指示代表所述切割区中的毛发和皮肤的所述一个或多个对象与所述切割激光束之间的距离的信息,并且根据由所述控制器生成的信息,来调整所述切割激光束(18)的强度。
15.一种切割毛发的方法,包括:
使用光学系统(20),跨切割区(15)引导与皮肤接触面(13)平行且隔开的切割激光束(18),以切割延伸到所述切割区中的毛发,
使用检测器(40)生成指示代表所述切割区中的毛发和/或皮肤的一个或多个对象的存在的信息,
其中所述检测器(40)包括成像传感器,所述成像传感器被配置为生成指示代表在跨所述切割区(15)引导的光源(18)的路径中接收的毛发和/或皮肤的一个或多个对象的存在的信息,
根据由所述检测器生成的信息,确定代表所述切割区中的毛发和/或皮肤的一个或多个对象的存在并且调整所述光学系统的一个或多个特性,以及
使用控制器(27),根据由所述检测器生成的信息生成指示代表所述切割区(15)中的毛发和皮肤的一个或多个对象与所述切割激光束之间的距离的信息,并且根据所述控制器生成的信息调整所述切割激光束(18)的路径。
16.一种计算机程序,包括指令,所述指令当被至少一个处理器执行时引起权利要求14或权利要求15所述的方法被执行。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP14178615.2 | 2014-07-25 | ||
| EP14178615 | 2014-07-25 | ||
| PCT/EP2015/066982 WO2016012584A1 (en) | 2014-07-25 | 2015-07-24 | A device for cutting hair |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN106572886A CN106572886A (zh) | 2017-04-19 |
| CN106572886B true CN106572886B (zh) | 2020-06-09 |
Family
ID=51228328
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201580041104.XA Expired - Fee Related CN106572886B (zh) | 2014-07-25 | 2015-07-24 | 用于切割毛发的设备 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20170156796A1 (zh) |
| EP (1) | EP3171806B1 (zh) |
| JP (1) | JP6684726B2 (zh) |
| CN (1) | CN106572886B (zh) |
| WO (1) | WO2016012584A1 (zh) |
Families Citing this family (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2700885C2 (ru) * | 2014-09-26 | 2019-09-23 | Конинклейке Филипс Н.В. | Бритвенный прибор для волос |
| WO2017148941A1 (en) * | 2016-03-01 | 2017-09-08 | Koninklijke Philips N.V. | System and method for automated hairstyle processing and hair cutting device |
| JP2019535427A (ja) * | 2016-11-22 | 2019-12-12 | ドミニオン エスセティック テクノロジーズ インコーポレイテッドDominion Aesthetic Technologies, Inc. | エステティック処理用システムおよび方法 |
| RU2732394C9 (ru) * | 2016-12-01 | 2021-05-05 | Конинклейке Филипс Н.В. | Устройство для срезания волос, содержащее световой индикатор |
| WO2018099932A1 (en) * | 2016-12-01 | 2018-06-07 | Koninklijke Philips N.V. | Hair cutting apparatus comprising a current detector |
| EP3388011A1 (en) * | 2017-04-12 | 2018-10-17 | Koninklijke Philips N.V. | A light-based skin treatment device |
| EP3552570A1 (en) * | 2018-04-13 | 2019-10-16 | Braun GmbH | Skin or hair treatment device for emitting high intense treatment light |
| CN108714916A (zh) * | 2018-06-29 | 2018-10-30 | 蔡华杰 | 一种电动剃须刀 |
| EP3613376A1 (en) * | 2018-08-21 | 2020-02-26 | Koninklijke Philips N.V. | A handheld device for performing a treatment operation on skin |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5993440A (en) * | 1997-10-16 | 1999-11-30 | Ghassemi; Faramarz Frank | Non-invasive laser cutting device and method |
| GB2465425A (en) * | 2008-11-21 | 2010-05-26 | Dezac Group Ltd | Laser hair removal and skin treatment apparatus |
| CN102204845A (zh) * | 2010-03-31 | 2011-10-05 | 太阳系美容事业有限公司 | 皮肤美容激光装置 |
| CN102356310A (zh) * | 2009-03-19 | 2012-02-15 | 皇家飞利浦电子股份有限公司 | 用于双折射对象的检测器 |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| IL97531A (en) * | 1991-03-12 | 1995-12-31 | Kelman Elliot | Hair cutting apparatus |
| IL109882A0 (en) * | 1994-06-02 | 1994-10-07 | Kelman Elliot | Hair cutting apparatus |
| US6162211A (en) * | 1996-12-05 | 2000-12-19 | Thermolase Corporation | Skin enhancement using laser light |
| AU2002325533A1 (en) * | 2002-05-31 | 2003-12-19 | Ya-Man Ltd. | Laser depilator |
| US7582082B2 (en) * | 2003-08-04 | 2009-09-01 | Koninklijke Philips Electronics N.V. | Device for shortening hairs by means of laser induced optical breakdown effects |
| US8834365B2 (en) * | 2010-12-23 | 2014-09-16 | Nlight Photonics Corporation | Skin color and capacitive sensor systems |
| EP2852345B1 (en) * | 2012-05-22 | 2015-10-21 | Koninklijke Philips N.V. | Device for cutting hair |
| CN104379079B (zh) * | 2012-07-31 | 2018-02-16 | 皇家飞利浦有限公司 | 激光的毛发切割器 |
| RU2656524C2 (ru) * | 2013-01-10 | 2018-06-05 | Конинклейке Филипс Н.В. | Режущая головка устройства для стрижки волос |
| GB2495248A (en) * | 2013-01-10 | 2013-04-03 | Dezac Group Ltd | Light treatment apparatus for hair removal |
| BR112015021949A2 (pt) * | 2013-03-11 | 2017-07-18 | Koninklijke Philips Nv | dispositivo para cortar pelos |
-
2015
- 2015-07-24 US US15/325,226 patent/US20170156796A1/en not_active Abandoned
- 2015-07-24 JP JP2016570780A patent/JP6684726B2/ja not_active Expired - Fee Related
- 2015-07-24 CN CN201580041104.XA patent/CN106572886B/zh not_active Expired - Fee Related
- 2015-07-24 EP EP15741219.8A patent/EP3171806B1/en not_active Not-in-force
- 2015-07-24 WO PCT/EP2015/066982 patent/WO2016012584A1/en active Application Filing
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5993440A (en) * | 1997-10-16 | 1999-11-30 | Ghassemi; Faramarz Frank | Non-invasive laser cutting device and method |
| GB2465425A (en) * | 2008-11-21 | 2010-05-26 | Dezac Group Ltd | Laser hair removal and skin treatment apparatus |
| CN102356310A (zh) * | 2009-03-19 | 2012-02-15 | 皇家飞利浦电子股份有限公司 | 用于双折射对象的检测器 |
| CN102204845A (zh) * | 2010-03-31 | 2011-10-05 | 太阳系美容事业有限公司 | 皮肤美容激光装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN106572886A (zh) | 2017-04-19 |
| EP3171806B1 (en) | 2019-05-01 |
| EP3171806A1 (en) | 2017-05-31 |
| JP2017522071A (ja) | 2017-08-10 |
| US20170156796A1 (en) | 2017-06-08 |
| WO2016012584A1 (en) | 2016-01-28 |
| JP6684726B2 (ja) | 2020-04-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN106572886B (zh) | 用于切割毛发的设备 | |
| JP5251858B2 (ja) | レーザレーダ装置 | |
| EP3171805B1 (en) | A device for cutting hair | |
| EP3054883B1 (en) | A device for cutting hair | |
| EP2990821A1 (en) | Laser surveying device | |
| EP3280341B1 (en) | A laser shaving device | |
| WO2016189164A1 (en) | An optical system | |
| KR102582761B1 (ko) | 센싱 방법 및 장치 | |
| CN107635501B (zh) | 光学系统 | |
| CN107530128B (zh) | 用于在激光刮剃设备中设定激光束与皮肤表面之间的切割距离的方法 | |
| JP2007315782A (ja) | 測距装置、測距方法およびプロジェクタ |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PB01 | Publication | ||
| PB01 | Publication | ||
| SE01 | Entry into force of request for substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant | ||
| CF01 | Termination of patent right due to non-payment of annual fee | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20200609 Termination date: 20210724 |