CN104718874B - 用于收割机的产量测量和根部切割器高度控制系统 - Google Patents
用于收割机的产量测量和根部切割器高度控制系统 Download PDFInfo
- Publication number
- CN104718874B CN104718874B CN201410602449.5A CN201410602449A CN104718874B CN 104718874 B CN104718874 B CN 104718874B CN 201410602449 A CN201410602449 A CN 201410602449A CN 104718874 B CN104718874 B CN 104718874B
- Authority
- CN
- China
- Prior art keywords
- processing device
- harvester
- image
- elevator
- sensor
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images














Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01F—MEASURING VOLUME, VOLUME FLOW, MASS FLOW OR LIQUID LEVEL; METERING BY VOLUME
- G01F25/00—Testing or calibration of apparatus for measuring volume, volume flow or liquid level or for metering by volume
- G01F25/0084—Testing or calibration of apparatus for measuring volume, volume flow or liquid level or for metering by volume for measuring volume
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01F—MEASURING VOLUME, VOLUME FLOW, MASS FLOW OR LIQUID LEVEL; METERING BY VOLUME
- G01F22/00—Methods or apparatus for measuring volume of fluids or fluent solid material, not otherwise provided for
Landscapes
- Physics & Mathematics (AREA)
- Fluid Mechanics (AREA)
- General Physics & Mathematics (AREA)
- Length Measuring Devices By Optical Means (AREA)
- Management, Administration, Business Operations System, And Electronic Commerce (AREA)
- Indicating And Signalling Devices For Elevators (AREA)
Abstract
本发明提供一种系统,该系统能够包括3D传感器。该3D传感器能够被构造成检测收割机上的升降机的区域。该3D传感器还能够被构造成发射与该区域相关的第一信号。该系统还能够包括处理装置,该处理装置与3D传感器通信。该系统还能够包括存储装置,该存储装置中存储有能够由处理装置执行的指令以使该处理装置接收第一信号并且基于该第一信号来确定升降机上的材料的体积。
Description
相关申请的引用
本申请要求名称为“Video-Based Yield Measurement and Base Cutte rHeight Control for Harvester”并且于2013年11月1日提交的美国临时专利申请No.61/898,600的优先权,该专利申请通过引用整体结合到本文中。
技术领域
本公开总体涉及用于农业操作的装置。更具体但不具有限制意义地,本公开涉及用于收割机的产量测量和根部切割器高度控制系统。
背景技术
收割机或联合收割机能够用于从农场采集材料(例如,甘蔗、蔬菜、农作物等)并且将材料装载到由拖拉机牵拉的大车中。像多种其它类型的农场操作一样,可能期望农场经营者了解农场的每一个部分的产量。这能够允许农场经营者优化耕种过程。关于产量的信息可能难以获取。
发明内容
在一个例子中,提供一种系统,该系统包括3D传感器。该3D传感器能够被构造成检测收割机上的升降机的区域。该3D传感器还能够被构造成发射与该区域相关的第一信号。该系统还能够包括处理装置,该处理装置与摄像机系统通信。该系统还能够包括存储装置,该存储装置中存储有能够由处理装置执行的指令以使处理装置接收第一信号并且基于该第一信号来确定升降机上的材料的体积。
在另一个例子中,提供一种方法,该方法能够包括通过处理装置接收来自3D传感器的数据信号。该3D传感器能够定位在收割机的升降机上。该方法还能够包括通过处理装置基于数据信号来产生三维(3D)图。该方法还能够包括通过处理装置基于3D图来确定升降机上的材料的体积。
在另一个例子中,提供一种收割机。该收割机能够包括升降机。3D传感器能够联接到收割机。该3D传感器能够被构造成检测与升降机相关的区域。该3D传感器还能够被构造成发射与该区域相关的数据信号以用于产生与升降机上的材料相关的3D图、确定材料的组成、以及基于组成和3D图来确定被包含在材料中的农作物的体积。
在另一个例子中,提供一种系统,该系统能够包括3D传感器,该3D传感器被构造成检测与收割机下方的地面相关的区域。该3D传感器还能够被构造成发射与该区域相关的第一信号。该系统还能够包括处理装置,该处理装置与3D传感器通信。该系统还能够包括存储装置,该存储装置中存储有能够由处理装置执行的指令以用于使处理装置基于第一信号来确定根部切割器的参数。
在另一个例子中,提供一种方法,该方法能够包括通过处理装置接收来自定位在收割机上的3D传感器的数据信号。该方法还能够包括通过处理装置基于数据信号来产生三维(3D)图。该方法还能够包括通过处理装置基于3D图来确定材料行的侧向位置或所述材料行的高度。
附图说明
图1是根据一个例子的用于与产量测量系统和根部切割器高度控制系统一起使用的收割机的例子的前透视图。
图2是根据一个例子的安装于收割机的升降机上的产量测量系统的透视图。
图3是根据一个例子的用于与产量测量系统一起使用的摄像机系统的透视图。
图4是根据一个例子的用于与产量测量系统一起使用的升降机的透视图。
图5是根据一个例子的用于与产量测量系统一起使用的具有桨的升降机的俯视图。
图6是方框图,其中示出了根据一个例子的用于与产量测量系统一起使用的计算装置的例子。
图7是根据一个例子的用于测量由升降机承载的材料的产量的过程的例子的方框图。
图8是根据一个例子的用于确定图像中的材料的组成的分段图像。
图9是根据一个例子的用于确定图像中的材料的组成的过程的例子。
图10示出了根据一个例子的由产量测量系统输出的产量分布图的例子。
图11是用于与根据一个例子的根部切割器高度控制系统一起使用的收割机的例子的侧透视图。
图12是用于与根据一个例子的根部切割器高度控制系统一起使用的收割机的例子的后透视图。
图13是根据一个例子的安装于收割机的下侧的摄像机系统的例子的透视图,该摄像机系统用于与根部切割器高度控制系统一起使用。
图14是根据一个例子的以一定角度安装于收割机的下侧并且用于与根部切割器高度控制系统一起使用的摄像机系统的例子的透视图。
图15是根据一个例子的用于与根部切割器高度控制系统一起使用的照明系统1502的例子的透视图。
图16是根据一个例子的用于确定新的根部切割器高度的过程的例子的方框图。
图17是图表,其中示出了根据一个例子的用于与根部切割器高度控制系统一起使用的3D图的例子。
图18是根据一个例子的用于确定行侧向位置、行高度、和材料高度的图表。
图19是根据一个例子的由根部切割器高度控制系统输出的地理图的例子。
具体实施方式
产量测量系统
本公开的某些方面和特征涉及用于收割机(例如,联合收割机)的实时产量测量系统。该产量测量系统能够包括3D传感器(例如,立体摄像机系统),该3D传感器联接到收割机的升降机。该3D传感器能够检测通过升降机的一部分之上的材料(例如,甘蔗、马铃薯、甜菜、番茄、或者其它的农作物)。该产量测量系统能够处理来自3D传感器的数据以实时(例如,基本在收割的同时)测量由升降机承载的材料的净体积。
在一些例子中,产量测量系统能够区分由升降机承载的农作物与杂质(例如,外来材料)。该产量测量系统能够通过确定由升降机承载的材料的一种或多种特性(例如,尺寸、颜色、形状、和纹理)来区分农作物与杂质。该产量测量系统能够基于所述特性来确定材料的组成(例如,材料中有多少是农作物以及材料中有多少是杂质)。例如,3D传感器能够包括两个或多个摄像机。该产量测量系统能够对所捕获的能够被摄像机看到的升降机的部分的图像进行分析。所捕获的图像能够捕获升降机上的材料的表面区域。基于所捕获的图像,该产量测量系统能够估计材料的表面区域的80%包括甘蔗并且材料的表面区域的20%包括杂质。基于农作物与杂质的比,该产量测量系统能够将比例因子应用于净体积测量结果,以估计与农作物相关的材料的体积。例如,该产量测量系统能够用净体积测量结果乘以80%(即,0.8),以确定与甘蔗相关的材料的实际体积。通过该方式,该产量测量系统能够通过所捕获的图像来确定(例如,估计)能够被摄像机看到的升降机的部分上的农作物的体积。
在一些例子中,该产量测量系统能够测量升降机的重叠部段中的材料的体积。该测量系统能够基于重叠的量来调节体积测量结果。这能够允许该产量测量系统提供更准确的体积测量结果。
在一些例子中,该产量测量系统能够包括用于检测与收割机相关的参数的传感器。所述参数能够包括地速、全球定位系统(GPS)位置、初级提取器速度、次级提取器速度、初级风扇速度、次级风扇速度、发动机rpm、与切顶机(topper)相关的参数、方向、农作物处理接合、以及收割机的操作状态。该产量测量系统能够整合体积测量结果与收割机参数以实时产生产量图。
给出这些说明性的例子以向读者介绍此处所讨论的大体主题并且不期望限定所公开的理念的范围。下文的段落描述了多个额外的特征以及参照其中相似的附图标记表示相似元件的附图的例子,并且方向描述用于描述说明性的方面,但是像说明性的方面一样不应当用于对本公开构成限制。
图1是根据一个例子的用于与产量测量系统和根部切割器高度控制系统一起使用的收割机100的例子的前透视图。收割机100能够用于从田地采集材料102(例如,图5中所示的甘蔗506)。收割机100能够是用于采集任何类型的农作物的任何的收割机100。材料102能够通过收割机100通入升降机104中。材料102能够被承载到升降机104上并且被装载(例如,倾倒)至由拖拉机106牵拉的大车108中。
图2是根据一个例子的安装于收割机器的升降机104上的产量测量系统200的透视图。产量测量系统200能够包括用于捕获升降机104中的材料的三维(3D)轮廓的3D传感器202。该3D传感器能够包括摄像机、3D激光扫描器、超声换能器、范围传感器、结构光摄像机、3D摄像机、和闪光激光雷达中的一种或多种。
在一些例子中,3D传感器202能够包括安装于相同的壳体或不同的壳体中的两个或多个摄像机(例如,彩色摄像机或灰度摄像机)。摄像机能够具有相对彼此已知的几何或空间关系。例如,如图3中所示,3D传感器202能够包括安装于壳体304中的立体摄像机302a、302b。壳体304能够包括用于将3D传感器202安装于收割机的一个或多个安装装置306a、306b(例如,孔、卡子、或夹子)。壳体304能够包括定位在立体摄像机302a、302b的前部的孔,使得壳体304不阻挡立体摄像机302a、302b的视场。立体摄像机302a、302b能够具有相对于彼此已知的空间关系。
3D传感器202能够安装于升降机104之上并且定向成面向升降机104。这能够允许3D传感器202检测由升降机104承载并且通过3D传感器202的可检测区域(例如,与3D传感器202相关的摄像机的视场)的材料。3D传感器202能够将与可检测区域相关的信号发射至计算装置(例如,图6的计算装置612)。
计算装置(未示出)能够定位在收割机内任何合适的位置处。例如,计算装置能够定位在收割机的客舱内。计算装置能够从3D传感器202接收信号并且将与信号相关的数据应用于一种或多种算法(例如,图像处理算法或立体视觉算法)。计算装置能够使用算法来产生由3D传感器202检测到的场景的3D轮廓(例如,升降机104的一部分以及升降机104的该部分内的材料)。在3D传感器202包括摄像机的例子中,随着构成3D传感器202的摄像机的数量增加,计算装置能够产生场景的更详细或更准确的3D轮廓。
如图8中所示,在3D传感器202包括摄像机的例子中,计算装置能够基于来自摄像机的所捕获的图像来产生场景的3D轮廓。例如,计算装置能够对所捕获的图像应用三角剖分。三角剖分能够包括将来自第一摄像机所拍摄的第一图像的像素与第二摄像机所拍摄的第二图像中的相关像素匹配。第一图像中的像素位置与第二图像中相应的像素位置之间的差值能够是视差。计算装置能够产生图像804,该图像804示出所捕获的图像中的像素之间的视差。基于第一图像中的每一个像素位置,相关的视差、以及第一摄像机与第二摄像机之间的实际空间中的距离(例如,以米为单位),计算装置能够确定与每一个像素相关的实际空间中的3D位置。计算装置能够使用实际空间中的3D位置来产生与摄像机数据相对应的3D轮廓806。
在一些例子中,计算装置能够使用来自3D传感器中的摄像机的数据以确定材料的特性。例如,计算装置能够确定与材料相关的一种或多种特性(例如,颜色和质地)以及与升降机相关的一种或多种特性。在一些例子中,计算装置能够确定材料是一种颜色(例如,褐色)并且升降机是不同的颜色(例如,银色)。
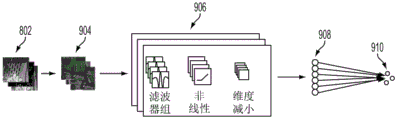
计算装置能够使用材料的特性来确定材料的组成。例如,计算装置能够使用与材料相关的特性和/或与升降机相关的特性来将所捕获的图像800划分为不同的分段区域802。在一些例子中,计算装置能够使用3D轮廓806来改进将所捕获的图像800划分为不同的分段区域802。如图9中所示,当将图像划分为分段区域802时,计算装置能够产生经过校正的分段区域904。经过校正的分段区域904能够包括已被校正光照、比例、和视角的分段区域802中的每一个的版本以改进这些因素的不变性。计算装置能够包括特征提取模块906,该特征提取模块906被构造成从经过校正的分段区域904中的每一个提取特征908。在一些例子中,特征提取模块906能够将一个或多个滤波器应用于经过校正的分段区域、改变经过校正的分段区域的维度(dimensions)、或者估计(account for)经过校正的分段区域中的非线性。计算装置能够将特征908分类(例如,通过对特征908应用分类器或回归量)来确定分段区域802中的每一个中的杂质含量910。通过该方式,计算装置能够对图像中的分段区域802进行分析,以确定升降机上的材料中杂质的量(并且由此确定期望的材料的量)。例如,计算装置能够确定材料是否包括40%的杂质和60%的期望的农作物。基于该比,计算装置能够对材料的净体积应用比例因子。该结果能够提供对由升降机104承载的期望的农作物的体积的更准确的确定。
回到图2,在一些例子中,计算装置能够基于材料的组成来对提取器风扇(未示出)进行操作。提取器风扇能够是与收割机相关联的农作物清理系统中的初级提取器或次级提取器的部件。由收割机采集的材料能够在移动到升降机104上之前通过农作物清理系统。提取器风扇能够旋转以吹到材料上,这能够从材料去除杂质和碎屑。在一些例子中,基于升降机104上的材料中的杂质的量,计算装置能够改变提取器风扇旋转的速率。如果杂质的量超过阈值,则计算装置能够使提取器风扇的速度增大。如果杂质的量低于阈值,则计算装置能够使提取器风扇的速度减小。在一些例子中,如果提取器风扇以较高的速度旋转,则提取器风扇能够将更多的杂质吹离所采集的材料,产生较高的农作物与杂质的比。通过该方式,计算装置能够确定材料的组成并且调节提取器风扇的速度以控制材料中的杂质的量。
在一些例子中,收割机能够包括初级提取器清理系统。该初级提取器清理系统能够围绕初级提取器(例如,图1的初级提取器110)移动以清理初级清理器。计算装置能够在如果初级提取器清理系统过于靠近3D传感器202(例如,与3D传感器202相关的摄像机)时使初级提取器清理系统脱离(例如,关闭)。这能够减少灰尘和碎屑在3D传感器202上积聚。
在一些例子中,产量测量系统200能够在升降机104不包括任何材料时测量升降机104的特性。所得到的测量结果能够起到基线或校准测量结果的作用,该基线或校准测量结果能够用于估计灰尘和碎屑的积聚、以及否则可能影响净体积测量结果的升降机104的形状的变形。例如,能够从净体积测量结果减去校准测量结果,以确定升降机104中的材料的实际体积。低通滤波器或概率滤波器(例如,卡尔曼滤波器)能够被应用于升降机104中的材料的实际体积,以提高准确性。
在一些例子中,产量测量系统200能够通过监测升降机104上的材料的体积以及与收割机相关的一个或多个参数(例如,地速、升降机速度、发动机负载、或收割机的接合)来确定升降机104中是否没有材料(例如,为了初始校准)。例如,如果在升降机104运行的同时收割机的地速为零mph超过七秒,则产量测量系统200可以确定升降机104中没有材料。作为另一个例子,如果在升降机104运行的同时农作物收割系统脱离超过五秒,则产量测量系统200可以确定升降机104中没有材料。当产量测量系统200确定升降机104中没有材料时,该产量测量系统200能够自动测量升降机104的特性(例如,如上所述),其产生或更新校准测量结果。该动态校准的过程能够估计随着时间过去的灰尘积聚量或者升降机104的变形,由此提高产量测量系统200的准确性。
存在用于3D传感器202的多个可能的安装位置以用于观察升降机104所承载的材料。在一些例子中,3D传感器202能够跨过升降机104的宽度位于中心。这能够消除或减少相对于可能堆积在升降机104桨(例如,图5中所示的桨502)上的材料的不均匀形状的偏置。在一些例子中,3D传感器202能够定位在可能离开升降机104的最远的距离处(例如,同时避免在升降机104上升或旋转时与初级提取器碰撞)。3D传感器202还能够相对于升降机平面定位成不与升降机平面垂直的一定角度(例如,38°)。例如,3D传感器202能够定位成相对于升降机的平面小于90°的角度。以这种方式定位和倾斜3D传感器202能够增强图像处理算法的结果,如下文所描述的。
例如,3D传感器202能够包括至少两个摄像机。为了产生摄像机所捕获的场景的3D轮廓,计算装置能够应用使来自来源于第一摄像机的第一图像的像素与来自第二摄像机的第二图像中相应的像素匹配的算法。该过程能够重复直到第一图像中的像素被映射到第二图像中相应的像素为止。然而,该过程可能受到能够位于升降机104的背板中的孔(例如图5中所示的孔504)的图案的不利影响。例如,与将来自第一图像的单个像素映射到来自第二图像的单个像素不同,与位于背板中的孔相关的来自第一图像的像素可以和与位于背板中的多个孔相关的来自第二图像的多个像素匹配。这能够在来自算法的输出中产生错误。在一些例子中,将摄像机定位在一定角度处能够造成摄像机所捕获的图像中的透视变形。这能够允许计算装置更易于发现摄像机图像之间独特的相应的像素,由此使相关误差最小化。在其它例子中,能够通过将位于背板中的孔的图案制造成不规则(这能够减少相关误差)来改进算法的输出。
在一些例子中,产量测量系统200能够包括照明系统204。该照明系统204能够包括一个或多个灯(例如,灯泡或发光二极管)。在一些例子中,照明系统204能够包括一个或多个传感器(例如,光电检测器),以用于检测环境光的量。计算装置能够基于来自一个或多个传感器的所检测到的环境光的水平来对一个或多个灯进行操作。
在3D传感器202包括摄像机的例子中,照明系统204能够光照摄像机的视场。这能够允许产量测量系统200用于具有最小的环境光或不具有环境光的环境中。例如,照明系统204能够允许产量测量系统200用于黎明、夜间、黄昏、或者较差的天气条件期间(例如,阴天)。
此外,在3D传感器202包括摄像机的例子中,照明系统204能够减少摄像机的曝光时间。这能够允许曝光时间足够快,以减少或消除摄像机所捕获的图像中的运动模糊,即使升降机104(以及升降机104上的材料)以高速率移动也是如此。例如,为了使摄像机的曝光时间最小化,照明系统204能够向摄像机所捕获的场景提供额外的光。该额外的光能够充分地光照场景,使得摄像机能够使用短曝光时间来捕获图像。
产量测量系统200能够包括一个或多个桨传感器206(例如,霍尔效应传感器)。在一些例子中,桨传感器206能够定位在升降机104的侧面上。在其它例子(例如,图4中所示的例子)中,桨传感器206能够定位在升降机104下方。桨传感器206能够检测桨传感器206何时通过桨并且将相关的传感器信号发射到计算装置。
在一些例子中,计算装置能够接收和使用桨传感器信号以触发通过3D传感器202捕获数据。例如,计算装置能够接收与通过桨传感器206的桨相关的桨传感器信号并且基本同时使3D传感器202捕获数据(例如,以使与3D传感器202相关联的摄像机捕获图像)。通过使用桨传感器206来触发数据捕获,每次捕获数据时,桨能够处于3D传感器202的可检测区域内基本相同的位置处。这能够改进用于确定升降机104中的材料的体积的算法的准确性。
在一些例子中,计算装置能够使用桨传感器信号来确定升降机104的速度。例如,单个桨传感器206能够定位在升降机104的侧面上。当桨通过桨传感器206时,桨传感器206能够检测桨并且将相关的传感器信号发射到计算装置。如果升降机104上的桨均匀地间隔开,计算装置能够使间距量被两个传感器信号之间的时间周期除,以确定升降机104的速度。例如,如果两个传感器信号之间的时间周期是200ms,并且桨之间的间距为20cm,那么计算装置能够使20cm被200ms除来确定速度为1m/s。
作为另一个例子,两个桨传感器206能够定位在升降机104的侧面上。计算装置能够基于来自两个桨传感器206的桨传感器信号以确定升降机的速度,即使桨未均匀地间隔开也是如此。例如,计算装置能够确定当桨通过第一桨传感器206(启动第一桨传感器206)时与当桨通过第二桨传感器206(启动第二桨传感器206)时之间的时间量。如果两个桨传感器206之间的间距已知,则计算装置能够通过使间距量被桨传感器206启动之间的时间量除来计算升降机的速度。例如,如果两个桨传感器206之间的间距是10cm,并且两个桨传感器206的启动之间的时间差为0.1s,那么计算装置能够用10cm除以0.1s以确定速度为1m/s。
除此之外或备选地,其它的方法能够用于确定升降机104的速度。例如,编码器能够定位在马达(例如,液压马达)或者使升降机104移动的齿轮上。计算装置能够使用来自编码器的传感器信号以确定升降机的速度。
在3D传感器202包括摄像机的例子中,计算装置能够使用桨在摄像机图像中的位置来确定升降机104的速度。例如,如图5中所示,虚线508能够表示如计算装置基于摄像机图像所确定的桨502的位置。计算装置能够使用桨502的位置、以及拍摄每一张图像之间的时间来确定升降机的速度。例如,计算装置能够确定两张图像之间桨502移动的距离(例如,10cm)。计算装置能够用桨502移动的距离除以拍摄两张图像之间的时间量(0.1s)来确定升降机的速度(1m/s)。在一些例子中,基于图像数据所确定的桨502的速度能够比基于桨传感器206所确定的桨502的速度更准确。计算装置还能够接收与收割机相关的一个或多个参数(例如,发动机速度)并且使用参数来提高所确定的升降机速度的准确性。
回到图2,产量测量系统200能够使用来自3D传感器202的数据和升降机104的速度以确定材料的产量。例如,计算装置能够使用来自3D传感器202的数据以产生3D传感器202的可检测区域内的场景的3D轮廓。计算装置能够使用3D轮廓来确定升降机104上的期望的农作物的瞬时体积。计算装置能够用瞬时体积乘以升降机的速度来估计由升降机104承载的期望的农作物的总体积。计算装置还能够接收与收割机相关的数据(例如,通过与收割机的电气系统的CAN总线连接),例如收割机的速度、GPS位置、和操作状态。计算装置能够基于由升降机104承载的期望的农作物的总体积和与收割机相关的数据来确定期望的农作物的瞬时产量测量结果。
图6是方框图,其中示出了根据一个例子的用于与产量测量系统一起使用的计算装置612的例子。该计算装置612能够包括网络接口620。网络接口620能够表示有利于网络连接的一个或多个部件。例子包括但不限于例如Ethernet、USB、IEEE1394的有线接口以及/或者例如IEEE802.11、蓝牙、或用于访问无线电话网络(例如,用于访问CDMA、GSM、UMTS、或其它的移动通信网络的收发器/天线)的无线电接口的无线接口。
计算装置612能够包括输入/输出接口610。I/O接口610能够用于有利于与用于输入数据的硬件(例如,按钮、开关、操作杆、触摸敏感表面、或其它的用户输入装置)或者输出数据的硬件(例如,显示器、触摸屏显示器、或其它的用户接口装置)的连接。例如,I/O接口610能够与3D传感器202(例如,摄像机、3D激光扫描器、超声换能器、范围传感器、结构光摄像机、3D摄像机、或闪光激光雷达)、桨传感器206(例如,霍尔效应传感器)、照明系统204(例如,以用于检测低光并且光照与3D传感器202相关联的摄像机的视场)、以及其它传感器618(例如,轴编码器)有线或无线通信。在一些例子中,计算装置612能够通过网络接口620与3D传感器202、桨传感器206、照明系统204、和其它传感器618有线或无线通信。
I/O接口能够与控制器局域网络(CAN)接口611通信或者包括该控制器局域网络(CAN)接口611。在一些例子中,CAN接口611能够与总线604或者计算装置612的另一个部件直接通信。CAN接口611能够通过CAN总线与收割机传感器614有线(例如,通过CAN总线)或无线通信并且被构造成从收割机传感器614接收数据。收割机传感器614能够检测收割机的各种参数。例如,收割机传感器614能够检测地速、GPS位置、初级提取器速度、次级提取器速度、初级风扇速度、次级风扇速度、发动机rmp、方向、农作物处理接合、操作状态、与切顶机相关的参数、以及收割机的其它参数。在一些例子中,收割机传感器614能够检测收割机外部的环境特性,例如收割宽度和农场条件(例如,燃烧(burn)对比绿色甘蔗)。收割机传感器614能够将传感器信号发射到CAN接口611。
计算装置612包括处理装置602。处理装置602能够执行一种或多种操作,以用于确定材料的产量测量结果。处理装置602能够执行存储于存储装置606中的指令608以执行操作。处理装置602能够包括一个处理装置或多个处理装置。处理装置602的非限制性例子包括现场可编程门阵列(“FPGA”)、专用集成电路(“ASIC”)、微处理器等。
处理装置602能够通过总线604通信地联接到存储装置606。非易失性存储装置606可以包括在断电时保持所存储的信息的任何类型的存储装置。存储装置606的非限制性例子包括电可擦除和可编程只读存储器(“EEPROM”)、闪存、或者任何其它类型的非易失性存储器。在一些方面中,存储装置606中的至少一些能够包括介质,处理装置602能够从该介质读取指令608。计算机可读介质能够包括电子、光学、磁性、或者能够向处理装置602提供计算机可读指令或其它的程序代码的其它存储装置。计算机可读介质的非限制性的例子包括(但不限于)磁盘(多个磁盘)、存储芯片(多个存储芯片)、ROM、随机存取存储器(“RAM”)、ASIC、配置处理器、光学存储器、或者计算机处理器能够从其读取指令的任何其它的介质。所述指令可以包括由编译器或解释器从以任何合适的计算机编程语言(例如,其中包括C、C++、C#等)编写的代码产生的处理器专用指令。在一些例子中,存储器606能够包括图像处理模块(未示出)。处理装置602能够使用图像处理模块来对从3D传感器202接收的数据执行一个或多个图像处理任务。
在一些例子中,处理装置602能够从3D传感器202接收数据。处理装置602能够将数据应用于算法,以确定升降机的一部分上的材料的瞬时体积。处理装置602还能够从桨传感器206接收传感器数据。处理装置602能够将来自桨传感器206的传感器数据应用于算法,以确定升降机的速度。处理装置602能够用瞬时体积乘以升降机的速度,以估计升降机上的材料的总体积。处理装置602还能够从收割机传感器614接收收割机数据。处理装置602能整合收割机数据与对材料的总体积的估计以实时产生产量图。
图7是根据一个例子的用于测量由升降机承载的材料的体积的过程700的例子的方框图。一些例子能够包括比图7中所示的步骤多、比图7中所示的步骤少、或者与图7中所示的步骤不同的步骤。参照上文结合图6中所示的计算装置612所描述的部件来描述以下步骤。
在方框702中,处理装置602对来自3D传感器202的数据进行处理。处理装置602能够通过与3D传感器202的有线或无线连接来接收数据。所述数据能够与位于3D传感器202的可检测区域内的升降机的部分相关。
在一些例子中,处理装置602能够对数据应用一种或多种算法以对数据进行处理。例如,处理装置602能够对数据进行纠正、对数据执行视差计算、以及对数据执行斑点滤波。
在方框704中,处理装置602基于经过处理的数据产生3D图(例如,3D拓扑图)。处理装置602能够执行一种或多种算法以产生3D图。在一些例子中,处理装置602能够应用三角剖分,以产生经过处理的数据的3D轮廓。三角剖分能够包括使来自由第一摄像机拍摄的第一图像的像素与由第二摄像机拍摄的第二图像中的相关像素匹配。第一图像中的像素位置与第二图像中相应的像素位置之间的差值能够是视差。基于第一图像中的像素位置、视差、和第一摄像机与第二摄像机之间的实际空间中的距离(例如,以米为单位),计算装置能够确定与像素相关的实际空间中的3D位置。能够对第一图像和第二图像中所有的像素重复该过程,以产生与经过处理的摄像机数据相对应的3D轮廓。
在一些例子中,当产生3D轮廓时,处理装置602能够将3D轮廓的坐标系变成与升降机平面对准的框架,使得y轴跟随桨方向,z轴从升降机指向3D传感器202(例如,3D传感器中的摄像机),并且X与y轴和z轴正交。框架的原点能够位于3D传感器202的可检测区域的中心处(例如,位于3D传感器202的摄像机的视域内)。处理装置602能够将3D轮廓划分为与升降机的平面相关联的方形网格(例如,尺寸为1.25cm×1.25cm)。处理装置602能够丢弃落入方形网格外侧的点。对于方形网格中的每一个方形而言,处理装置602能够确定相对于升降机的平面的稳健的最大高度(例如,使用中值滤波器)。基于方形网格和稳健的最大高度,处理装置602能够产生3D图。3D图中的每一个单元都能够具有相关的稳健的最大高度。
在方框706中,处理装置602对3D图进行滤波。处理装置602能够对3D图进行滤波以去除噪声、错误数据、和外来数据。这可能产生更准确的3D图。例如,处理装置602能够使用空间滤波器滤除与校准数据(例如,如参照方框709所讨论的)相关的3D图的一部分。例如,处理装置602能够过滤与升降机桨相关的3D图的部分。这能够允许处理装置602产生不掺杂桨的体积的瞬时体积测量结果。
在方框708中,处理装置602确定产量测量系统是否处于校准模式。例如,处理装置602能够在存储器606中查阅位置以确定产量测量系统是否处于校准模式。如果产量测量系统处于校准模式,则过程700能够继续到方框709。
在方框709中,处理装置602产生校准数据。处理装置602能够通过对3D图进行分析来产生校准数据,以确定升降机背板的位置以及升降机背板中的任何变形(例如,弯曲或脊)。处理装置602还能够对3D图进行分析,以确定桨的特性。升降机背板的位置、升降机背板中的任何变形、以及桨的特性能够被包含在校准数据中。
在方框710中,处理装置602存储校准数据。在一些例子中,处理装置602能够将校准数据存储在存储器606中。在其它例子中,处理装置602可以将数据存储在其它位置处,例如存储在远程数据库或计算装置612中(例如,通过经由网络接口620与远程数据库或计算装置612通信)。
如果产量测量系统不处于校准模式,过程700能够继续到方框712。在方框712中,处理装置602基于经过滤波的3D图来确定材料的体积。例如,处理装置602能够从单元的稳健的最大高度(例如,在方框704中确定的)减去与升降机背板的平面相关的校准值。这能够产生单元中的材料的高度。由于每一个单元都能够具有已知的面积(例如,1.25cm×1.25cm=1.5625cm2面积),因此处理装置602能够用单元中的材料的高度乘以单元的面积,以确定单元中的材料的体积。处理装置602能够对所有的单元重复该过程,以确定升降机上的材料的总瞬时体积。
在方框714中,处理装置602能够估计可由3D传感器202检测的材料的组成。例如,来自3D传感器202的数据能够与升降机上的材料的表面区域的图像相关。处理装置602能够确定与材料的表面区域相关的特性(例如,尺寸、形状、质地、和颜色)。基于所述特性,处理装置602能够确定材料的表面区域中的期望的材料与外来材料的比。例如,处理装置602可以确定材料的表面区域包括80%的期望的材料和20%的杂质。基于期望的材料与外来材料的比,处理装置602能够对瞬时体积测量结果(例如,在方框712中所确定的)应用比例因子,以估计与期望的材料相关的材料的体积。
在方框716中,处理装置602确定升降机的速度。在一些例子中,处理装置602能够依赖来自桨传感器206的传感器信号以确定升降机的速度。在其它的例子中,处理装置602能够对来自3D传感器202的数据应用算法,以确定升降机的速度。在进一步其它的例子中,处理装置602能够使用来自其它传感器618(例如,轴编码器)的传感器信号来确定升降机的速度。
在方框718中,处理装置602估计升降机上的期望的材料的总瞬时体积。在一些例子中,处理装置602能够对从方框707估计出的瞬时体积应用比例因子(基于在方框714中所确定的组成)。这能够产生对期望的材料的瞬时体积的估计。处理装置602能够用该瞬时体积估计乘以升降机的速度,以确定升降机上的期望的材料的总瞬时体积。
在方框720中,处理装置602确定期望的材料的瞬时产量。处理装置602能够基于期望的材料的总瞬时体积和收割机参数来确定期望的材料的瞬时产量。例如,处理装置602能够接收与来自收割机传感器614的与收割机的速度、GPS位置、或方向相关的数据。处理装置602能够整合期望的材料的总瞬时体积(例如,来自方框718)与GPS位置以确定位于该GPS位置处的期望的材料的瞬时产量。通过该方式,处理装置602能够产生代表位于农场上的多个位置处的期望的材料的产量的实时产量图。在一些例子中,瞬时产量能够随着时间积分,使得能够产生所收割的材料的累计产量的测量结果。瞬时产量能够基于材料的重量被进一步调谐,这能够在材料到达加工磨房时被确定或者通过使用农场中密度或重量测量方法被确定。
图10示出了根据一个例子的由产量测量系统输出的产量图1002a-d。产量图1002a示出了使用原始产量数据产生的产量图。在一些例子中,一种或多种算法能够被应用于原始产量数据以提高产量图的准确性。
例如,所采集的材料可能不总是稳定地流过收割机。而是,材料可能在通入升降机104上之前积聚在收割机中。如果材料积聚并且成批地通入升降机104上,则产量测量系统200可能测量错误的高产量值。计算装置能够通过追踪积聚周期期间的时间和所覆盖的空间区域来处理这些产量“尖峰”并且在空间上重新分配高产量值。例如,计算装置能够将发生产量尖峰的时间以及一个或多个收割机参数(例如,GPS位置或收割机斩波器压力)应用于算法,以在空间上再分配高产量值。能够由用户从多个选项动态地选择算法。例如,所述选项能够包括用于确定以下的算法:(i)积聚区域期间的平均流;或(ii)基于在先通过农场的相同区域的收割机的图案拟合流量。这能够减少由于材料的积聚而造成的产量图中的错误,由此提高产量的精确度和准确性。
作为另一个例子,计算装置能够在收割机未采集材料时消除由收割机收集的数据点。计算装置能够基于与收割机相关的一个或多个参数来确定收割机何时不采集农作物。例如,计算装置能够基于根部切割器的高度(例如,如果根部切割器的高度大于或小于阈值)、升降机的驱动接合、升降机上的材料的瞬时体积(例如,瞬时体积是否大于或小于阈值)、或者GPS位置(例如,收割机是否定位在已知不具有农作物或位于预定农场边界外侧的区域中)来确定收割机是否不采集农作物。产量图1002b示出了产量图的例子,其中由收割机在不采集农作物时收集的原始产量数据已被消除。
作为再一个例子,当已由收割机从农场实际采集到数据时与当GPS接收器确定与材料相关的GPS位置时之间可能存在时间延迟。该时间延迟能够使GPS接收器用偏差特定距离的GPS位置来标记所采集的材料。计算装置能够应用一种或多种算法来校正这种不准确性。例如,基于来自收割机传感器614的数据(例如,收割机的地速和升降机的速度),计算装置能够确定GPS位置可能关闭的距离。计算装置能够基于该距离来校正材料的GPS位置。经过校正的GPS位置能够更准确地反映从其采集材料的农场中的精确的空间位置。产量图1002c示出了使用经过校正的GPS位置产生的产量图的例子。
作为另一个例子,空间滤波能够用于改进产量数据(例如,产量图)的视觉表象。空间滤波,而不是时间序列滤波,能够允许产量数据的多维滤波。能够调节空间滤波的特性以满足最终用户目标。例如,Kriging滤波或反加权距离滤波能够用于产生跨过农作物中的其中农作物被采集的多个区域的产量数据的平滑响应。产量图1002d示出了使用经过校正的GPS位置和空间滤波而产生的产量图的例子。
在一些例子中,计算装置612还能够产生机器质量生产率的实时测量结果。机器质量生产率能够代表每小时产生的材料的量(例如,以吨为单位)。计算装置612能够基于材料的体积(或产量)以及产生该体积(或产量)的该材料所花费的时间量来确定该机器质量生产率。机器质量生产率能够用于评估资本资产利用并且优化支持设备物流和收割物流。
在一些例子中,产量数据和机器质量生产率能够通过用户界面(例如,动态用户界面)被提供给操作者。例如,产量图和机器质量生产率测量结果能够通过用户界面被提供,该用户界面被输出在与计算装置612通信的显示器上。这能够有利于数据采集和操作反馈。在一些例子中,产量数据能够用于优化所收割的农作物的运输以及与收割相关的支持设备物流。机器质量生产率能够引导与服务、维护、和生产队(例如,甘蔗生产队)的操作者培训相关的业务规则。
根部切割器高度控制系统
本公开的某些方面和特征涉及用于测量位于收割机上的根部切割器的高度的根部切割器高度控制系统。该根部切割器高度控制系统能够包括具有至少两个摄像机的摄像机系统。所述摄像机能够捕获由根部切割器切割并且通过收割机下方的材料(例如,残茬)的图像。该根部切割器高度控制系统能够对图像应用图像处理,以确定根部切割器的高度。基于所确定的根部切割器的高度,该根部切割器高度控制系统能够改变根部切割器的高度(例如,变成最佳或优选的高度)。
在一些例子中,收割机能够包括产量测量系统(上文所述)和根部切割器高度控制系统(下文所述)二者。
图11是根据一个例子的用于与根部切割器高度控制系统1100一起使用的收割机100的例子的侧透视图。根部切割器高度控制系统1100能够包括安装于收割机100的3D传感器1102。该3D传感器能够包括摄像机、3D激光扫描器、超声换能器、范围传感器、结构光摄像机、3D摄像机、和闪光激光雷达中的一种或多种。
该3D传感器1102能够安装于任何合适的位置以用于检测正被根部切割器的刀片处理或者先前已被该根部切割器的刀片处理过的地面区域的一种或多种特性。例如,3D传感器1102能够定位在收割机100的下方、收割机100的前部、或者收割机100的后部。在图12中所示的例子中,3D传感器1102安装于收割机100的下方以及收割机的后轮之间。在该例子中,3D传感器1102能够检测位于收割机100的正后方以及收割机100的后轮之间的区域1202。
在一些例子中,根部切割器高度控制系统1100能够包括碎屑屏障1104。碎屑屏障1104能够定位在3D传感器1102的附近、周围、或前部,以防止灰尘或碎屑进入3D传感器1102的可检测区域(例如,视场)。在一些例子中,碎屑屏障1104能够包括帷幕或者隔板(例如,塑料或金属隔板)。
图13是根据一个例子的安装于用于与根部切割器高度控制系统一起使用的收割机1300的下侧的3D传感器1102的例子的透视图。该3D传感器1102能够包括两个或多个摄像机。所述摄像机能够与参照图2-3所描述的摄像机类似地构造。
3D传感器1102能够以一定角度(例如,俯仰角)安装于收割机。该角度能够相对于地平面(例如,几何平面)成0度至90度之间。在一些例子中,该角度能够被构造成允许3D传感器1102观察不与地面直接垂直的区域。例如,如图14中所示,3D传感器1102能够以13.30度的角度安装于收割机。
图15是根据一个例子的用于与根部切割器高度控制系统一起使用的照明系统1502的例子的透视图。该照明系统1502能够包括一个或多个灯1504a、1504b以及用于检测环境光的量的一个或多个传感器(未示出)。例如,照明系统1502能够包括定位在3D传感器1102的一个侧向端部处的一个灯1504a和定位在3D传感器1102的另一个侧向端部处的另一个灯1504b。灯1504a、1504b能够与3D传感器1102的壳体分开或整体形成。在一些例子中,灯1504a、1504b能够包括保护性壳体,该保护性壳体被构造成保护灯1504a、1504b不受灰尘和碎屑的影响。该保护性壳体能够包括塑料、橡胶、有机玻璃、或金属。
该根部切割器高度控制系统能够对灯1504a、1504b进行操作。在一些例子中,该根部切割器高度控制系统能够基于来自一个或多个环境光传感器的所检测到的环境光的水平来对灯1504a、1504b进行操作。这能够允许根部切割器高度控制系统在低环境光到无环境光时使用。这还能够允许与3D传感器1102相关的摄像机具有足够短的曝光时间,以减少或消除运动模糊,即使收割机以高速率移动也是如此。
根部切割器高度控制系统能够包括计算装置(例如,与图6的计算装置612类似)。在一些例子中,计算装置能够从照明系统中的环境光传感器接收传感器信号并且基于所述传感器信号来对灯进行操作。
计算装置还能够从3D传感器1102接收数据。数据能够与通过收割机下方或附近的切割材料(例如,残茬)相关。计算装置能够将一种或多种算法(例如,立体视觉算法)应用于数据(或者数据的经过滤波的版本),以产生地面的2.5维(3D)图。基于3D图,计算装置能够确定地面的轮廓。
在一些例子中,计算装置能够使用地面的轮廓来确定(i)行侧向位置;(ii)地面之上的行高度;(iii)材料高度;(iv)材料的侧向位置;以及(v)期望的根部切割器高度设置。在一些例子中,计算装置能够产生代表与田地中的多个位置相关的材料高度数据的地理图。
图16是根据一个例子的用于控制根部切割器高度的过程1600的例子的方框图。一些例子能够包括比图16中所示的步骤少、比图16中所示的步骤多、或者与图16中所示的步骤不同的步骤。参照上文关于图6中所示的计算装置612所述的部件对以下步骤进行描述。
在方框1602中,处理装置602对来自3D传感器202的数据进行处理。处理装置602能够通过与3D传感器202的有线或无线连接接收数据。该数据能够与3D传感器202的可检测区域内的材料相关。数据能够是或者能够通过处理装置602转换成3D轮廓。例如,处理装置602能够使用三角剖分或者任何其它的方法将数据转化成3D轮廓。
处理装置602能够将一种或多种算法应用于数据以对数据进行处理。在一些例子中,处理装置602能够对数据进行滤波,以去除噪声和错误数据。例如,计算装置能够将滤波器应用于数据,以减少遮挡与3D传感器202相关的摄像机的视场的空气中的材料(例如,甘蔗的切片)的影响。
在一些例子中,处理装置602能够对数据进行校准。例如,收割机能够在平坦地面上被驱动。处理装置602能够使用来自3D传感器202的数据以确定3D传感器202相对于地面的位置和取向。处理装置602能够存储该位置和取向并且使用该位置和取向来对数据进行校准。
在方框1604中,处理装置602基于经过处理的数据产生3D图。该3D图能够包括多个单元。每一个单元都能够包括与实际空间中的相关区域相对应的矩形区域。例如,如图17中所示,3D图1702能够包括多个单元。每一个单元的中心都能够由点1706代表。在一些例子中,3D图中的每一个单元都能够与这样的参数相关:所述参数与实际空间中的单元面积相关。例如,参数能够包括材料的高度(例如,残茬的高度)、以及与实际空间中的单元面积相关的材料的高度的标准偏差。3D图的边界1704能够限定3D图的界限。
为了产生3D图,处理装置602能够将3D数据点映射到相应的单元。例如,3D数据点能够被映射到具体单元1708。在一些例子中,多个3D数据点能够被映射到相同的具体单元1708。
在方框1606中,处理装置602确定上部3D图和下部3D图。下部3D图能够包括与位于地面水平处或地面水平附近的平面中的特征相关的3D图。上部3D图能够包括与位于沿材料的顶部(例如,残茬的顶部)或位于该材料的顶部附近的平面中的特征相关的3D图。处理装置602能够基于3D图(例如,方框1604中所产生的)来确定上部3D图和下部3D图。处理装置602能够使用3D数据点相对于地面的高度的高百分数(例如,90%)来确定上部3D图。处理602能够使用3D数据点相对于地面的高度的低百分数(例如,10%)来确定下部3D图。
在方框1608中,处理装置602确定行侧向位置和行高度(例如,与行相关的实际空间中的区域的侧向位置和高度)。处理装置602能够基于下部3D图来确定行位置。处理装置602能够将模型(例如,抛物线)拟合到下部3D图。例如,如图18中所示,处理装置602能够将抛物线1810拟合到下部3D图1802。处理装置602能够基于抛物线1810的顶点1808沿x轴的位置来确定行的侧向位置。在一些例子中,如果3D传感器202定位在收割机的轮(或履带)的侧向中间处,则x轴的中心能够代表收割机的轮(或履带)之间的侧向中间。
在一些例子中,处理装置602能够基于抛物线1810的顶点1808来确定行高度1806。例如,处理装置602能够基于抛物线的顶点1808的高度(例如,0.1m)来确定行高度1806。
在方框1610中,处理装置602确定材料的高度。处理装置602能够基于上部3D图来确定材料的高度。例如,如图18中所示,处理装置602能够产生上部3D图1804。为了确定材料的高度,处理装置602能够从顶点1808处的上部3D图1804的高度(例如,1.5m)减去下部3D图1802的高度。顶点1808处的下部3D图1802的高度与上部3D图1804之间的差值能够是材料的高度。
在方框1612中,处理装置602确定新的根部切割器高度(或取向)。处理装置602能够基于所确定的材料高度(例如,从方框1610)、当前的根部切割器高度设置、和用户输入数据来确定新的根部切割器高度。例如,用户可以将期望的材料高度输入计算装置612中(例如,通过键盘或触摸屏显示器)。处理装置602能够基于期望的材料高度与所确定的材料高度之间的差值来确定新的根部切割器高度(或取向)。在一些例子中,处理装置602能够使用比例、滞后、或者其它算法来产生新的根部切割器高度。例如,处理装置602能够与期望的材料高度与所确定的材料高度之间的差值成比例地确定新的根部切割器高度。
在一些例子中,处理装置602能够基于校准因子来确定新的根部切割器高度。例如,用户能够操纵根部切割器高度直到收割机所切割的材料的达到期望的高度为止。用户可以使处理装置602确定材料的高度(例如,使用方框1602-1610中所描述的方法)并且存储材料的高度。该高度能够用作校准因子。处理装置602能够比较之后收割机所切割的材料的高度与校准因子。处理装置602能够基于材料的高度与校准因子之间的差值来确定新的根部切割器高度。
在一些例子中,当确定新的根部切割器时,处理装置602能够将根部切割器的高度变成新的根部切割器高度。通过该方式,根部切割器控制系统能够起到反馈回路的作用。
在方框1614中,处理装置602能够基于来自3D传感器202的数据来确定掉落(例如,被切割)材料片的数量、掉落材料片的长度、和材料根的数量。例如,处理装置602能够从该数据提取特征。处理装置602能够通过滤波、确定与该数据相关的质地信息、以及确定与该数据相关的2D和3D边缘来从该数据提取特征。处理装置602还能够确定与该数据相关的熵、频率、以及一阶导数和高阶导数。处理装置602将特征分类(例如,通过应用分类器或回归量)以检测并且确定(i)掉落材料片的数量;(ii)掉落材料片的长度;以及(iii)可见的材料根的数量。
在一些例子中,处理装置602能够估计由于根部切割器高度过低(例如,关于期望的或最佳的根部切割器高度)而造成的损坏。如果根部切割器高度过低,则根部切割器能够穿透材料行并且提取或损坏材料根。处理装置602能够基于掉落材料片的数量、掉落材料片的长度、以及可见的材料根的数量中的一个或多个来估计损坏。
图19是由根据一个例子的根部切割器高度控制系统输出的地理图1900的例子。在一些例子中,地理图1900能够通过被输出到显示器上的用户界面提供。这能够有利于数据采集和操作反馈。
地理图1900能够包括颜色不同的区域1902、1904、1906。在一些例子中,图上颜色不同的区域1902、1904、1906中的每一个都能够与不同的材料高度相关。例如,彩色区域1902能够与具有高材料的地理区域相关。彩色区域1904能够与具有低材料的地理区域相关。彩色区域1906能够与具有中间高度材料的地理区域相关。在其它例子中,图上颜色不同的区域1902、1904、1906中的每一个都能够与掉落材料片的数量、掉落材料片的长度、或材料根的数量相关。例如,彩色区域1902能够与具有数量大的掉落材料片的地理区域相关。彩色区域1904能够与具有数量少的掉落的掉落材料片的地理区域相关。彩色区域1906能够与具有中等数量的掉落材料片的地理区域相关。
根部切割器高度控制系统能够基于(i)材料高度、掉落材料片的数量、掉落材料片的长度、或材料根的数量;以及(ii)来自一个或多个收割机传感器(例如,图6的收割机传感器614)的数据来产生彩色区域1902、1904、1906。例如,当根部切割器高度控制系统确定特定位置处的材料高度时,根部切割器高度控制系统能够接收与该特定位置相关的GPS数据(例如,纬度和经度)。根部切割器高度控制系统能够将该GPS位置定位在地理图1900上并且基于材料高度来更新与该GPS位置相关的颜色。作为另一个例子,当根部切割器高度系统确定特定位置处的掉落材料片的数量时,根部切割器高度控制系统能够接收与该特定位置相关的GPS数据(例如,纬度和经度)。根部切割器高度控制系统能够将该GPS位置定位在地理图1900上并且基于掉落材料片的数量来更新与该GPS位置相关的颜色。
仅仅为了说明和描述的目的提出上文所描述的某些实施例(其中包括说明性的实施例)并且不期望使所公开的精确形式的公开内容是穷尽的或受到限制。对于本领域技术人员而言,在不偏离本公开的范围的情况下,其多种改型、变型、和用途将是显而易见的。
Claims (36)
1.一种用于收割机的产量测量的系统,所述系统包括:
立体摄像机系统,所述立体摄像机系统被构造成检测收割机上的升降机的区域并且发射与所述区域相关的图像,所述升降机具有升降机背板,所述升降机背板带有被配置为减少体积确定误差的孔的不规则图案;
处理装置,所述处理装置与所述立体摄像机系统通信;以及
存储装置,所述存储装置中存储有能够由所述处理装置执行的指令以使所述处理装置:
接收所述图像;
至少部分通过使用三角剖分来分析所述图像而生成所述区域的三维3D轮廓,在所述三角剖分中,来自所述立体摄像机系统的第一摄像机的第一图像中的第一组像素与来自所述立体摄像机系统的第二摄像机的第二图像中的第二组像素相关联,所述3D轮廓包括方形网格,所述方形网格中的每个方形具有相对于所述升降机的平面的预定区域和对应高度;
从所述3D轮廓中滤除与所述升降机上的桨相对应的数据点,以产生经滤波的3D轮廓;以及
基于经滤波的3D轮廓来确定所述升降机上的材料的体积。
2.根据权利要求1所述的系统,所述系统还包括传感器,所述传感器被构造成检测所述收割机的参数并且将与所述参数相关的信号发射到所述处理装置,其中所述存储装置还包括能够由所述处理装置执行的指令以使所述处理装置:
接收所述信号;以及
基于所述信号来产生三维3D图;
基于所述3D图来确定所述材料的体积;以及
基于所述材料的体积和所述信号来确定所述材料的产量。
3.根据权利要求2所述的系统,其中所述参数包括GPS位置、速度、方向、或农作物处理接合。
4.根据权利要求2所述的系统,其中所述存储装置还包括能够由所述处理装置执行的指令,以使所述处理装置:
通过由距离来修改与所述产量相关的GPS位置而产生经过校正的GPS位置;
对所述产量进行空间滤波以产生经过滤波的产量值;以及
基于经过滤波的产量值和经过校正的GPS位置来产生产量图。
5.根据权利要求1所述的系统,其中所述存储装置还包括能够由所述处理装置执行的指令以用于使所述处理装置:
通过分析所述图像中所述材料的颜色和质地来确定所述材料的组成,其中所述组成包括第一百分比的可归属于目标材料的材料以及第二百分比的可归属于外来材料的材料;以及
基于所述组成来将比例因子应用于所述材料的体积以确定校准体积。
6.根据权利要求5所述的系统,其中所述存储装置还包括能够由所述处理装置执行的指令以用于使所述处理装置:
基于所述组成来改变与初级提取器或次级提取器相关的风扇的速度。
7.根据权利要求5所述的系统,其中所述存储装置还包括能够由所述处理装置执行的指令以用于使所述处理装置:
在所述升降机不包括材料时操作所述立体摄像机系统;
从所述立体摄像机系统接收所述图像;
基于所述图像来确定基线体积;以及
基于所述基线体积来修改所述经过校准的体积。
8.根据权利要求5所述的系统,其中所述存储装置还包括能够由所述处理装置执行的指令以用于使所述处理装置通过以下方式来确定所述材料的组成:
基于所述升降机的第一颜色不同于所述材料的第二颜色,确定图像的第一部分对应于所述升降机并且所述图像的第二部分对应于所述材料。
9.根据权利要求1所述的系统,所述系统还包括照明系统,所述照明系统包括:被构造成检测环境光的量的传感器和定位成照亮所述升降机的区域的至少一个灯,其中所述存储装置还包括能够由所述处理装置执行的指令以使所述处理装置
基于检测到的所述环境光的量来操作所述至少一个灯以照亮所述升降机的区域。
10.根据权利要求1所述的系统,所述系统还包括桨传感器,所述桨传感器被构造成检测桨在所述升降机上的位置并且将信号发射至所述处理装置,其中所述存储装置还包括能够由所述处理装置执行的指令以使所述处理装置:
接收所述信号;
基于所述信号来确定所述升降机的速度;以及
基于所述信号对所述立体摄像机系统进行操作。
11.根据权利要求1所述的系统,其中所述存储装置还包括能够由所述处理装置执行的指令以用于使所述处理装置:
通过识别在来自所述立体摄像机系统的图像中的桨而基于来自所述立体摄像机系统的所述图像来确定所述桨在所述升降机上的位置;以及
基于所述桨的位置来确定所述升降机的速度。
12.一种用于收割机的产量测量的方法,所述方法包括:
通过处理装置接收来自立体摄像机系统的图像,所述图像是收割机的升降机的区域的图像,所述升降机具有升降机背板,所述升降机背板带有被配置为减少体积确定误差的孔的不规则图案;
通过所述处理装置至少部分通过使用三角剖分来分析所述图像来产生所述升降机的区域的三维3D轮廓,在所述三角剖分中,来自所述立体摄像机系统的第一摄像机的第一图像中的第一组像素与来自所述立体摄像机系统的第二摄像机的第二图像中的第二组像素相关联,所述3D轮廓包括方形网格,所述方形网格中的每个方形具有相对于所述升降机的平面的预定区域和对应高度;
通过所述处理装置并且从所述3D轮廓中滤除与所述升降机上的桨相对应的数据点,以产生经滤波的3D轮廓;以及
通过所述处理装置基于经滤波的3D轮廓来确定所述升降机上的材料的体积。
13.根据权利要求12所述的方法,所述方法还包括:
基于校准数据对所述3D轮廓进行校准,其中所述校准数据使用在所述材料定位在所述升降机中之前所产生的来自所述立体摄像机系统的其它图像而确定,并且其中所述校准数据说明(i)所述升降机的背板的位置、(ii)所述升降机的所述背板中的任何变形以及(iii)所述升降机上的桨的特性。
14.根据权利要求12所述的方法,所述方法还包括:
确定所述升降机的速度;以及
使所述升降机的速度乘以所述体积以确定所述升降机上的材料的总体积。
15.根据权利要求12所述的方法,所述方法还包括:
通过以下方式确定所述升降机上的材料的体积的组成:
基于所述升降机中的所述材料的视觉特征将所述图像分成多个分段区域;
针对光照、比例、和视角中的至少一个通过校正所述分段区域而生成经校正的分段区域;
对所述经校正的分段区域执行特征提取,以确定在所述经校正的分段区域中的一个或多个特征;以及
将所述一个或多个特征分类为杂质或目标材料,以确定在所述升降机上的所述材料的组成;以及
基于所述组成来修改所述升降机上的材料的体积。
16.根据权利要求15所述的方法,所述方法还包括基于所述材料的体积的组成来改变与初级提取器或次级提取器相关的风扇的速度。
17.根据权利要求12所述的方法,所述方法还包括:
从传感器接收与所述收割机的参数相关的信号;以及
基于所述材料的体积和所述参数来产生产量图。
18.根据权利要求17所述的方法,其中产生所述产量图还包括:
基于所述材料的体积来产生产量;
通过由距离修改所述参数来产生经过校正的GPS位置;
对所述产量进行空间滤波,以产生经滤波的产量值;以及
基于所述经滤波的产量值和经校正的GPS位置来产生所述产量图。
19.一种收割机,所述收割机包括:
升降机,具有升降机背板,所述升降机背板带有被配置为减少体积确定误差的孔的不规则图案;以及
立体摄像机系统,所述立体摄像机系统联接到所述收割机并且被构造成检测与所述升降机相关的区域且发射与所述区域相关的图像,其中所述收割机被配置成:
用于通过使用三角剖分来分析所述图像而产生与所述升降机的所述区域的三维3D轮廓,在所述三角剖分中,来自所述立体摄像机系统的第一摄像机的第一图像中的第一组像素与来自所述立体摄像机系统的第二摄像机的第二图像中的第二组像素相关联;
调整所述3D轮廓的坐标平面以与所述升降机的平面对准,使得所述3D轮廓的所述坐标平面包括(i)沿所述升降机上的桨移动的方向定向的第一轴,(ii)从所述升降机朝向所述立体摄像机系统定向的第二轴,以及(iii)与所述第一轴和所述第二轴正交的第三轴;
通过分析所述升降机的所述区域的所述3D轮廓而确定材料的组成;以及
基于所述材料的所述组成来确定被包含在所述材料中的农作物的体积。
20.根据权利要求19所述的收割机,所述收割机还包括桨传感器,所述桨传感器被构造成检测桨在所述升降机上的位置并且发射能够用于以下的桨传感器信号:
确定所述升降机的速度;以及
对所述立体摄像机系统进行操作。
21.根据权利要求19所述的收割机,所述收割机还包括照明系统,所述照明系统包括:
传感器,所述传感器被构造成检测环境光的量;以及
多个灯,定位成照亮所述升降机的所述区域并且与所述立体摄像机系统分开,
其中所述收割机被配置成操作所述多个灯,以基于使用所述传感器检测到的所述环境光的量而照亮所述升降机的所述区域。
22.根据权利要求19所述的收割机,所述收割机还包括传感器,所述传感器被构造成检测所述收割机的参数并且发射能够用于以下的与所述参数相关的传感器信号:
基于所述材料的体积和所述传感器信号来确定所述农作物的产量。
23.根据权利要求22所述的收割机,其中所述产量能够用于产生产量图。
24.根据权利要求19所述的收割机,其中所述材料的组成能够用于改变与初级提取器或次级提取器相关的风扇的速度。
25.一种用于收割机的根部切割器高度控制的系统,所述系统包括:
收割机,包括:
根部切割器;以及
立体摄像机系统,定位在所述收割机的下方,所述立体摄像机系统被构造成捕获在所述收割机下方或后方的区域并且发射所述区域的图像;处理装置,所述处理装置与所述立体摄像机系统通信;以及
存储装置,所述存储装置上存储有能够由所述处理装置执行的指令以用于使所述处理装置:
通过使用三角剖分来分析所述图像而生成所述区域的三维
3D轮廓,在所述三角剖分中,来自所述立体摄像机系统的第一摄像机的第一图像中的第一组像素与来自所述立体摄像机系统的第二摄像机的第二图像中的第二组像素相关联;以及
基于所述3D轮廓来修改所述根部切割器的高度。
26.根据权利要求25所述的系统,其中所述存储装置还包括能够由所述处理装置执行的指令以用于使所述处理装置:
基于所述区域的3D轮廓来确定残茬行的侧向位置或所述残茬的高度;以及
基于所述残茬行的侧向位置或所述残茬的高度来修改所述根部切割器的所述高度。
27.根据权利要求25所述的系统,所述系统还包括碎屑屏障,所述碎屑屏障被构造成保护所述立体摄像机系统不受损坏或碎屑的影响。
28.根据权利要求25所述的系统,所述系统还包括照明系统,所述照明系统包括:
传感器,所述传感器被构造成检测环境光的量;以及
至少一个灯,定位在所述收割机下方,用于照亮所述区域。
29.根据权利要求25所述的系统,其中所述存储装置还包括能够由所述处理装置执行的指令以用于使所述处理装置:
从所述立体摄像机系统接收图像;
通过分析所述图像来确定校准因子;以及
基于所述校准因子来确定所述根部切割器的所述高度。
30.根据权利要求25所述的系统,所述系统还包括传感器,所述传感器被构造成检测所述收割机的位置并且发射与所述位置相关的传感器信号,并且其中所述存储装置还包括能够由所述处理装置执行的指令以用于使所述处理装置:
分析所述图像以确定关于在所述图像中描绘的材料的信息,所述信息包括:所述材料的高度、掉落材料片的数量、掉落材料片的长度、或者材料根的数量;以及
基于所述收割机的所述位置以及所述信息来产生地理图。
31.一种用于收割机的根部切割器高度控制的方法,所述方法包括:
通过处理装置接收来自定位在收割机下方的立体摄像机系统的图像,所述收割机包括根部切割器,所述图像描绘在所述收割机下方或后方的区域;
通过所述处理装置通过使用三角剖分来分析所述图像而产生所述区域的三维3D轮廓,在所述三角剖分中,来自所述立体摄像机系统的第一摄像机的第一图像中的第一组像素与来自所述立体摄像机系统的第二摄像机的第二图像中的第二组像素相关联;以及
通过所述处理装置基于所述3D轮廓来修改所述根部切割器的高度。
32.根据权利要求31所述的方法,所述方法还包括:
对来自所述立体摄像机系统的所述图像进行滤波以生成经滤波的图像;
使用所述经滤波的图像,确定在所述图像中描绘的材料行的侧向位置、或者在所述图像中描绘的所述材料行的高度。
33.根据权利要求32所述的方法,所述方法还包括:
基于校准数据对所述材料行的高度进行校准,其中所述校准数据使用(i)来自所述立体摄像机系统的其它图像和(ii)用户输入来确定。
34.根据权利要求32所述的方法,所述方法还包括:
从传感器接收指示所述收割机的位置的信号;以及
基于所述收割机的所述位置和所述材料行的高度来产生地理图。
35.根据权利要求34所述的方法,所述方法还包括:
分析所述图像以确定关于在所述图像中描绘的材料的信息,所述信息包括:掉落材料片的数量、掉落材料片的长度、或者材料根的数量;以及
基于所述收割机的所述位置以及所述信息来产生所述地理图。
36.根据权利要求31所述的方法,其中对所述图像进行滤波包括减小空中碎屑对所述3D轮廓的影响。
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US201361898600P | 2013-11-01 | 2013-11-01 | |
| US61/898,600 | 2013-11-01 | ||
| US14/527,152 US10371561B2 (en) | 2013-11-01 | 2014-10-29 | Yield measurement and base cutter height control systems for a harvester |
| US14/527,152 | 2014-10-29 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN104718874A CN104718874A (zh) | 2015-06-24 |
| CN104718874B true CN104718874B (zh) | 2020-03-03 |
Family
ID=53006743
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201410602449.5A Active CN104718874B (zh) | 2013-11-01 | 2014-10-31 | 用于收割机的产量测量和根部切割器高度控制系统 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US10371561B2 (zh) |
| CN (1) | CN104718874B (zh) |
| AU (1) | AU2014256411B2 (zh) |
| BR (1) | BR102014027364B1 (zh) |
| IN (1) | IN2014DE03130A (zh) |
Families Citing this family (57)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US11212962B2 (en) * | 2013-02-20 | 2022-01-04 | Deere & Company | Field condition determination |
| US9961832B2 (en) * | 2014-06-13 | 2018-05-08 | Deere & Company | Control of base cutter orientation in sugarcane harvesters |
| US10334781B2 (en) * | 2015-08-20 | 2019-07-02 | Cnh Industrial America Llc | Side shake rate based on machine throughputs |
| US10234837B2 (en) * | 2015-09-28 | 2019-03-19 | Deere & Company | Adaptive performance targets for controlling a mobile machine |
| US10303677B2 (en) * | 2015-10-14 | 2019-05-28 | The Climate Corporation | Computer-generated accurate yield map data using expert filters and spatial outlier detection |
| US9788485B2 (en) * | 2015-10-23 | 2017-10-17 | Deere & Company | Variable speed elevator control system |
| US10645876B2 (en) | 2016-03-01 | 2020-05-12 | Deere & Company | System and method for controlled cleaning in a cane harvester |
| US20180042176A1 (en) * | 2016-08-15 | 2018-02-15 | Raptor Maps, Inc. | Systems, devices, and methods for monitoring and assessing characteristics of harvested specialty crops |
| CN108200804B (zh) * | 2016-12-19 | 2021-05-04 | 上海交通大学 | 视觉传感谷物流量在线检测装置和检测方法 |
| GB201621879D0 (en) | 2016-12-21 | 2017-02-01 | Branston Ltd | A crop monitoring system and method |
| SE543160C2 (en) * | 2017-01-16 | 2020-10-13 | Tracy Of Sweden Ab | A method for determining and managing origin identification of logs |
| US10317272B2 (en) * | 2017-05-17 | 2019-06-11 | Deere & Company | Automatic wireless wagon detection apparatus and method |
| US11744180B2 (en) | 2018-01-29 | 2023-09-05 | Deere & Company | Harvester crop mapping |
| US10827676B2 (en) * | 2018-01-29 | 2020-11-10 | Deere & Company | Monitor and control system for a harvester |
| US11006577B2 (en) * | 2018-02-26 | 2021-05-18 | Cnh Industrial America Llc | System and method for adjusting operating parameters of an agricultural harvester based on estimated crop volume |
| CN108990521B (zh) * | 2018-09-30 | 2023-11-10 | 江苏农牧科技职业学院 | 一种基于嵌入式的收割机割台集成控制系统 |
| BR112021007032A2 (pt) | 2018-10-24 | 2021-07-20 | The Climate Corporation | alavancando a genética e a engenharia de recursos para impulsionar a previsibilidade de colocação para seleção e recomendação de produtos de sementes por campo |
| US11672203B2 (en) | 2018-10-26 | 2023-06-13 | Deere & Company | Predictive map generation and control |
| US11467605B2 (en) | 2019-04-10 | 2022-10-11 | Deere & Company | Zonal machine control |
| US11589509B2 (en) | 2018-10-26 | 2023-02-28 | Deere & Company | Predictive machine characteristic map generation and control system |
| US11957072B2 (en) | 2020-02-06 | 2024-04-16 | Deere & Company | Pre-emergence weed detection and mitigation system |
| US11653588B2 (en) | 2018-10-26 | 2023-05-23 | Deere & Company | Yield map generation and control system |
| US11240961B2 (en) | 2018-10-26 | 2022-02-08 | Deere & Company | Controlling a harvesting machine based on a geo-spatial representation indicating where the harvesting machine is likely to reach capacity |
| US11079725B2 (en) | 2019-04-10 | 2021-08-03 | Deere & Company | Machine control using real-time model |
| US11641800B2 (en) | 2020-02-06 | 2023-05-09 | Deere & Company | Agricultural harvesting machine with pre-emergence weed detection and mitigation system |
| US11178818B2 (en) | 2018-10-26 | 2021-11-23 | Deere & Company | Harvesting machine control system with fill level processing based on yield data |
| US11234366B2 (en) | 2019-04-10 | 2022-02-01 | Deere & Company | Image selection for machine control |
| US11568467B2 (en) | 2019-04-10 | 2023-01-31 | Climate Llc | Leveraging feature engineering to boost placement predictability for seed product selection and recommendation by field |
| US11778945B2 (en) | 2019-04-10 | 2023-10-10 | Deere & Company | Machine control using real-time model |
| CN110089260A (zh) * | 2019-04-15 | 2019-08-06 | 江苏大学 | 一种刮板式输粮的谷物流量监测方法及监测系统 |
| US10829033B1 (en) | 2019-08-20 | 2020-11-10 | Cnh Industrial America Llc | Automatically controlled header work lights |
| US11231317B2 (en) | 2019-08-20 | 2022-01-25 | Cnh Industrial America Llc | Systems and methods for filtering sensor signal interference deriving from powered components of a header |
| DE102019122905A1 (de) * | 2019-08-27 | 2021-03-04 | Exel Industries | Bestimmungsvorrichtung zur Bestimmung eines Datums beim Ernten von Früchten, entsprechende Behandlungsvorrichtung und Erntemaschine |
| US20220330468A1 (en) * | 2019-09-20 | 2022-10-20 | Seeing Systems Pty Ltd | System and methods for gathering data relating to crops and for managing crop growing operations |
| US11477940B2 (en) | 2020-03-26 | 2022-10-25 | Deere & Company | Mobile work machine control based on zone parameter modification |
| US11946747B2 (en) | 2020-10-09 | 2024-04-02 | Deere & Company | Crop constituent map generation and control system |
| US11675354B2 (en) | 2020-10-09 | 2023-06-13 | Deere & Company | Machine control using a predictive map |
| US11474523B2 (en) | 2020-10-09 | 2022-10-18 | Deere & Company | Machine control using a predictive speed map |
| US11864483B2 (en) | 2020-10-09 | 2024-01-09 | Deere & Company | Predictive map generation and control system |
| US11874669B2 (en) | 2020-10-09 | 2024-01-16 | Deere & Company | Map generation and control system |
| US11927459B2 (en) | 2020-10-09 | 2024-03-12 | Deere & Company | Machine control using a predictive map |
| US11844311B2 (en) | 2020-10-09 | 2023-12-19 | Deere & Company | Machine control using a predictive map |
| US11711995B2 (en) | 2020-10-09 | 2023-08-01 | Deere & Company | Machine control using a predictive map |
| US11849672B2 (en) | 2020-10-09 | 2023-12-26 | Deere & Company | Machine control using a predictive map |
| US11889788B2 (en) | 2020-10-09 | 2024-02-06 | Deere & Company | Predictive biomass map generation and control |
| US11635765B2 (en) | 2020-10-09 | 2023-04-25 | Deere & Company | Crop state map generation and control system |
| US11849671B2 (en) | 2020-10-09 | 2023-12-26 | Deere & Company | Crop state map generation and control system |
| US11727680B2 (en) | 2020-10-09 | 2023-08-15 | Deere & Company | Predictive map generation based on seeding characteristics and control |
| US11650587B2 (en) | 2020-10-09 | 2023-05-16 | Deere & Company | Predictive power map generation and control system |
| US11871697B2 (en) | 2020-10-09 | 2024-01-16 | Deere & Company | Crop moisture map generation and control system |
| US11845449B2 (en) | 2020-10-09 | 2023-12-19 | Deere & Company | Map generation and control system |
| US11895948B2 (en) | 2020-10-09 | 2024-02-13 | Deere & Company | Predictive map generation and control based on soil properties |
| US11825768B2 (en) | 2020-10-09 | 2023-11-28 | Deere & Company | Machine control using a predictive map |
| US11592822B2 (en) | 2020-10-09 | 2023-02-28 | Deere & Company | Machine control using a predictive map |
| US11983009B2 (en) | 2020-10-09 | 2024-05-14 | Deere & Company | Map generation and control system |
| US11889787B2 (en) | 2020-10-09 | 2024-02-06 | Deere & Company | Predictive speed map generation and control system |
| US20230189689A1 (en) * | 2021-12-22 | 2023-06-22 | Agco Corporation | Row position mapping of an agricultural implement |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20020014116A1 (en) * | 1999-02-26 | 2002-02-07 | Campbell Ronald H. | Methods and systems for measuring crop density |
| US6389785B1 (en) * | 1997-06-24 | 2002-05-21 | Claas Selbstfahrende Erntemaschinen Gmbh | Contour scanning apparatus for agricultural machinery |
| CN1695419A (zh) * | 2005-06-23 | 2005-11-16 | 上海交通大学 | 基于远程数据传输的智能测产系统 |
| US20080156124A1 (en) * | 2005-02-23 | 2008-07-03 | O'connor Timothy C | Method and Apparatus for Tracing and Blending Commingled Non-Liquid Bulk Materials |
| US20100269470A1 (en) * | 2009-04-24 | 2010-10-28 | Price Randy R | Optical Yield Monitor for a Sugar Cane Harvester |
| US20110166788A1 (en) * | 2009-08-18 | 2011-07-07 | Terry Griffin | Computer-Automated Spatial Analysis |
| CN102379189A (zh) * | 2010-08-31 | 2012-03-21 | 中国农业机械化科学研究院 | 一种粮食产量分布信息测量方法及装置 |
Family Cites Families (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6690413B1 (en) * | 1999-04-21 | 2004-02-10 | Michael S. Moore | Tractor-trailer viewing system |
| AU2001237053A1 (en) * | 2000-02-17 | 2001-08-27 | Bintech. Lllp | Bulk materials management apparatus and method |
| DE10214648A1 (de) * | 2002-04-02 | 2003-10-16 | Claas Selbstfahr Erntemasch | Messeinrichtung an einer landwirtschaftlichen Maschine |
| CA2430737C (en) | 2003-06-02 | 2011-12-20 | Centre De Recherche Industrielle Du Quebec | Method and apparatus for estimating surface moisture content of wood chips |
| DE102004038404B4 (de) * | 2004-08-07 | 2021-01-07 | Deere & Company | Einrichtung zur selbsttätigen Einstellung der Schnitthöhe eines Erntevorsatzes zur Ernte stängelartiger Pflanzen |
| EP2004339B1 (en) * | 2006-03-31 | 2012-01-25 | Thomas Valerio | Method and apparatus for sorting fine nonferrous metals and insulated wire pieces |
| GB0714942D0 (en) * | 2007-08-01 | 2007-09-12 | Cnh Belgium Nv | A biomass cleaner improvements in corp harvesting machine and related methods |
| DE102010017688A1 (de) * | 2010-07-01 | 2012-01-05 | Claas Selbstfahrende Erntemaschinen Gmbh | Vorrichtung zur Erfassung und Bestimmung der Zusammensetzung von Schüttgut |
| US9348111B2 (en) * | 2010-08-24 | 2016-05-24 | Apple Inc. | Automatic detection of lens deviations |
| JP5934653B2 (ja) * | 2010-11-29 | 2016-06-15 | パナソニック インテレクチュアル プロパティ コーポレーション オブ アメリカPanasonic Intellectual Property Corporation of America | 画像分類装置、画像分類方法、プログラム、記録媒体、集積回路、モデル作成装置 |
| US8649940B2 (en) * | 2012-02-10 | 2014-02-11 | Deere & Company | Method and stereo vision system for managing the unloading of an agricultural material from a vehicle |
| US8988426B2 (en) * | 2012-06-05 | 2015-03-24 | Apple Inc. | Methods and apparatus for rendering labels based on occlusion testing for label visibility |
| JP6270361B2 (ja) * | 2013-07-16 | 2018-01-31 | 株式会社キーエンス | 三次元画像処理装置、三次元画像処理方法及び三次元画像処理プログラム並びにコンピュータで読み取り可能な記録媒体及び記録した機器 |
-
2014
- 2014-10-29 US US14/527,152 patent/US10371561B2/en active Active
- 2014-10-31 CN CN201410602449.5A patent/CN104718874B/zh active Active
- 2014-10-31 BR BR102014027364-6A patent/BR102014027364B1/pt active IP Right Grant
- 2014-10-31 IN IN3130DE2014 patent/IN2014DE03130A/en unknown
- 2014-10-31 AU AU2014256411A patent/AU2014256411B2/en active Active
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6389785B1 (en) * | 1997-06-24 | 2002-05-21 | Claas Selbstfahrende Erntemaschinen Gmbh | Contour scanning apparatus for agricultural machinery |
| US20020014116A1 (en) * | 1999-02-26 | 2002-02-07 | Campbell Ronald H. | Methods and systems for measuring crop density |
| US20080156124A1 (en) * | 2005-02-23 | 2008-07-03 | O'connor Timothy C | Method and Apparatus for Tracing and Blending Commingled Non-Liquid Bulk Materials |
| CN1695419A (zh) * | 2005-06-23 | 2005-11-16 | 上海交通大学 | 基于远程数据传输的智能测产系统 |
| US20100269470A1 (en) * | 2009-04-24 | 2010-10-28 | Price Randy R | Optical Yield Monitor for a Sugar Cane Harvester |
| US20110166788A1 (en) * | 2009-08-18 | 2011-07-07 | Terry Griffin | Computer-Automated Spatial Analysis |
| CN102379189A (zh) * | 2010-08-31 | 2012-03-21 | 中国农业机械化科学研究院 | 一种粮食产量分布信息测量方法及装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| AU2014256411B2 (en) | 2018-09-27 |
| BR102014027364A2 (pt) | 2016-08-09 |
| CN104718874A (zh) | 2015-06-24 |
| US10371561B2 (en) | 2019-08-06 |
| AU2014256411A1 (en) | 2015-05-21 |
| US20150124054A1 (en) | 2015-05-07 |
| IN2014DE03130A (zh) | 2015-07-03 |
| BR102014027364B1 (pt) | 2021-01-12 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN104718874B (zh) | 用于收割机的产量测量和根部切割器高度控制系统 | |
| CN110602943B (zh) | 监测作物的系统和方法 | |
| US10292321B2 (en) | Agricultural work machine for avoiding anomalies | |
| US20230345928A1 (en) | Identifying and avoiding obstructions using depth information in a single image | |
| RU2747303C2 (ru) | Система для управления рабочим параметром уборочной жатки | |
| EP3125670B1 (en) | Agricultural implement operator monitoring methods | |
| US20180047177A1 (en) | Systems, devices, and methods for monitoring and assessing characteristics of harvested specialty crops | |
| EP1655620B1 (en) | Obstacle detection using stereo vision | |
| EP3555562B1 (en) | Crop scanner | |
| US20210241482A1 (en) | Yield prediction for a cornfield | |
| WO2017011595A1 (en) | Modular systems and methods for determining crop yields with high resolution geo-referenced sensors | |
| CN106663192B (zh) | 用闪光灯、相机和自动化图像分析检测水果的方法和系统 | |
| US11935289B2 (en) | Agricultural analysis robotic systems and methods thereof | |
| CN104766135A (zh) | 一种预测农作物产量的方法、装置及系统 | |
| CN111968074A (zh) | 融合双目相机和imu的收割机倒伏作物检测与收获方法 | |
| US20220101554A1 (en) | Extracting Feature Values from Point Clouds to Generate Plant Treatments | |
| US20220100996A1 (en) | Ground Plane Compensation in Identifying and Treating Plants | |
| EP4130659A1 (en) | Agricultural traveling vehicle, control device, and program | |
| Swanson et al. | A multi-modal system for yield prediction in citrus trees | |
| CN107656287B (zh) | 一种基于激光雷达的麻类作物行的边界提取设备及方法 | |
| CN109685174B (zh) | 一种黄瓜丰产性自动分析装置及方法 | |
| WO2023276227A1 (ja) | 列検出システム、列検出システムを備える農業機械、および、列検出方法 | |
| Jeon et al. | Stereovision system and image processing algorithms for plant specific application | |
| Vollet et al. | Simultaneous 3D Reconstruction and Vegetation Classification Utilizing a Multispectral Stereo Camera | |
| Wen et al. | Detection of Wheat Lodging by Binocular Cameras during Harvesting Operation. Agriculture 2023, 13, 120 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| GR01 | Patent grant | ||
| GR01 | Patent grant |