CN103309355A - 多轴支撑气浮平台的质心偏移容许干扰的测量与监控方法 - Google Patents
多轴支撑气浮平台的质心偏移容许干扰的测量与监控方法 Download PDFInfo
- Publication number
- CN103309355A CN103309355A CN2013101877957A CN201310187795A CN103309355A CN 103309355 A CN103309355 A CN 103309355A CN 2013101877957 A CN2013101877957 A CN 2013101877957A CN 201310187795 A CN201310187795 A CN 201310187795A CN 103309355 A CN103309355 A CN 103309355A
- Authority
- CN
- China
- Prior art keywords
- carrying platform
- centroid
- platform
- supporting leg
- centerdot
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images








Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16M—FRAMES, CASINGS OR BEDS OF ENGINES, MACHINES OR APPARATUS, NOT SPECIFIC TO ENGINES, MACHINES OR APPARATUS PROVIDED FOR ELSEWHERE; STANDS; SUPPORTS
- F16M11/00—Stands or trestles as supports for apparatus or articles placed thereon Stands for scientific apparatus such as gravitational force meters
- F16M11/02—Heads
- F16M11/04—Means for attachment of apparatus; Means allowing adjustment of the apparatus relatively to the stand
- F16M11/06—Means for attachment of apparatus; Means allowing adjustment of the apparatus relatively to the stand allowing pivoting
- F16M11/12—Means for attachment of apparatus; Means allowing adjustment of the apparatus relatively to the stand allowing pivoting in more than one direction
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F16—ENGINEERING ELEMENTS AND UNITS; GENERAL MEASURES FOR PRODUCING AND MAINTAINING EFFECTIVE FUNCTIONING OF MACHINES OR INSTALLATIONS; THERMAL INSULATION IN GENERAL
- F16M—FRAMES, CASINGS OR BEDS OF ENGINES, MACHINES OR APPARATUS, NOT SPECIFIC TO ENGINES, MACHINES OR APPARATUS PROVIDED FOR ELSEWHERE; STANDS; SUPPORTS
- F16M11/00—Stands or trestles as supports for apparatus or articles placed thereon Stands for scientific apparatus such as gravitational force meters
- F16M11/02—Heads
- F16M11/18—Heads with mechanism for moving the apparatus relatively to the stand
Abstract
多轴支撑气浮平台的质心偏移容许干扰的测量与监控方法,属于超精密仪器设备平台技术领域。本发明为了解决现有支撑平台的调平状态受限,应用范围狭窄的问题。它首先设定质心偏移量阈值,然后将质心偏移量G(x0,y0)与质心偏移量阈值进行比较,当质心偏移量G(x0,y0)小于质心偏移量阈值时,对支撑腿的伸缩长度进行补偿;当质心偏移量G(x0,y0)大于质心偏移量阈值时,通过控制气足的喷嘴喷气使承载平台在水平混凝土基座上平动,跟随承载平台上负载的运动以调整相对位移量(x2,y2),直到将质心偏移量G(x0,y0)调至质心偏移量阈值范围之内。本发明用于气浮平台的质心偏移容许干扰的测量与监控。
Description
技术领域
本发明涉及多轴支撑气浮平台的质心偏移容许干扰的测量与监控方法,属于超精密仪器设备平台技术领域。
背景技术
在现代社会中,经常需要高平面度的平台,比如在空间交汇对接、地面测量、导航、网络通信和编队控制等全物理仿真试验中,需要支撑整个地面仿真器,为地面仿真实验提供基础平台;为编队卫星地面试验验证、控制算法验证分析等物理仿真试验提供平台支撑。由于平台运动或者是静止时都可能由于大面积水平基座的不平整等原因处于倾斜状态,不利于为负载提供尽可能水平的作业平台保证准确对接,因此需要平台在静止和运动状态都能够被快速、精确的调平,以保证平台足够的水平度。
现有技术中,存在各种使用调平机构的工作平台,其调平机构为重力式(自重)调平机构、四杆调平机构或等容积液压缸调平机构。但是,上述调平机构具有许多缺点,例如:
(1)重力式调平机构依靠自重来调平工作平台,其由工作平台、支架组成,这种调平机构不稳定,安全系数低,操作员操作舒适性差。
(2)四杆调平机构采用的是靠物理中四杆的特性来调平工作平台,它的缺陷是对于结构为伸缩的臂架不适用,应用范围狭窄。
(3)等容积液压缸调平机构采用的是在变幅臂处安装被动油缸,工作平台处安装等容积调平液压缸来调平工作平台,其由工作平台、被动油缸、等容积调平液压缸构成。它的缺点是对于结构为多级伸缩的臂架不适用,应用范围狭窄。
因此,就迫切需要提供一种系统平台,能够在任何状况下,由调平系统调节使工作平台保持为水平状态。
发明内容
本发明目的是为了解决现有支撑平台的调平状态受限,应用范围狭窄的问题,提供了一种多轴支撑气浮平台的质心偏移容许干扰的测量与监控方法。
本发明所述多轴支撑气浮平台的质心偏移容许干扰的测量与监控方法,所述多轴支撑气浮平台包括承载平台,三条支撑腿、三个气浮筒和三个气足,
所述承载平台为圆形平台,承载平台由三条支撑腿支撑,三条支撑腿与承载平台下表面的三个连接点构成等边三角形,并且该等边三角形的中心与承载平台的圆心重合;
每条支撑腿的末端连接一个气浮筒,每个气浮筒的底端通过气浮球轴承连接一个气足;
承载平台上表面安装一个平面光栅,该平面光栅读数头与承载平台上的负载固联;
所述测量与监控方法首先设定质心偏移量阈值,然后将质心偏移量G(x0,y0)与质心偏移量阈值进行比较,
当质心偏移量G(x0,y0)小于质心偏移量阈值时,按下述方法对支撑腿的伸缩长度进行补偿:
所述质心偏移量G(x0,y0)的获得方法为:以承载平台的圆心为原点建立两面直角坐标系,承载平台的质心坐标为(0,0),将G(x0,y0)作为承载平台与其上负载整体的质心,其中x0为质心偏移量G(x0,y0)在空间坐标系中X轴方向的坐标,y0为质心偏移量G(x0,y0)在空间坐标系中Y轴方向的坐标,采用平面光栅测得承载平台上面负载与承载平台的相对位移量(x2,y2),则有:
式中M1为承载平台的质量,M2为承载平台上负载的质量;
质心偏移量G(x0,y0)对气足气膜高度的影响按以下方法获得:
设定三条支撑腿与承载平台下表面的三个连接点为A、B和C,其中A点坐标为 B点坐标为
B点坐标为 C点坐标为
C点坐标为 式中L为三个连接点A、B和C形成的等边三角形的边长,
式中L为三个连接点A、B和C形成的等边三角形的边长,
当气浮平台处于静态平衡状态时,根据力系的主矢和对于坐标轴的主矩为零得到公式:
式中i=1、2和3,F1为对应于A点的支撑腿上的负载力,F2为对应于A点的支撑腿上的负载力,F3为对应于C点的支撑腿上的负载力;Mx(Fi)为负载力Fi绕X轴的等效转矩,My(Fi)为负载力Fi绕Y轴的等效转矩,
将A、B和C三点坐标代入上述公式得到:
求解上式,获得F1、F2和F3的值:
由此获得当前对应于A点的支撑腿的承重质量m1、对应于B点的支撑腿的承重质量m2和对应于C点的支撑腿的承重质量m3,m1、m2和m3与质心G(x0,y0)的关系为:
式中M为承载平台与其上负载整体的总质量;
最后获得质心偏移量G(x0,y0)与气足的气膜高度矩阵:
式中h1为对应于A点的支撑腿底部气足的气膜高度,h2为对应于B点的支撑腿底部气足的气膜高度,h3为对应于C点的支撑腿底部气足的气膜高度,G为承载平台与其上负载整体的总重量,J为支撑腿底部气足的气膜刚度;
气足的气膜高度变化使支撑轴产生的高度变化通过倾角传感器或者线阵CCD的测量信号获得,对该测量信号进行处理,获得质心偏移量G(x0,y0)对承载平台倾角干扰信息,由承载平台倾角干扰信息计算获得各个支撑腿调平所需的位移量,由此实现对气浮平台的质心偏移容许干扰的测量与补偿;
当质心偏移量G(x0,y0)大于质心偏移量阈值时,通过控制气足的喷嘴喷气使承载平台在水平混凝土基座上平动,跟随承载平台上负载的运动以调整相对位移量(x2,y2),直到将质心偏移量G(x0,y0)调至质心偏移量阈值范围之内。
所述承载平台的半径为2米,三条支撑腿与承载平台下表面的三个连接点构成的等边三角形的顶点距离承载平台圆心的距离为1.4米。
本发明的优点:本发明可以用于空间交汇对接的仿真系统以及其它各种要求水平的系统。该气浮平台具有置承重量大、调平精度高、调整时间快等优点;所述气浮平台在使用过程中,通过与平台测量控制系统的相互配合,具有自修整功能,能很好地提高平台的调整精度、稳定性和可靠性。
本发明所述多轴支撑气浮平台可根据实际需求,快速、精确的为负载提供所需的高平面度作业平台,属于超精密仪器设备。本发明为实际工程应用中提供了高精度调平的大面积平台,它的承载平台在大面积水平基座上能够保证在平动和静止时均达到有高精准的水平度。
附图说明
图1是本发明所述多轴支撑气浮平台的结构示意图;
图2是多轴支撑气浮平台放置在水平混凝土基座上的结构示意图;
图3是承载平台与三条支撑腿的连接状态示意图;
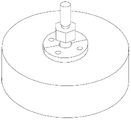
图4是气足的立体结构示意图;
图5是图4的剖视图;
图6是所述气浮平台整体质心偏移位置的坐标示意图;
图7是倾角传感器的安装方式与三条支撑腿之间的位置关系图;
图8是利用线阵CCD计算气浮平台倾角的示意图;
图9是平台测量控制系统的控制框图;
图10是多轴支撑气浮平台的调平方法的流程图。
具体实施方式
具体实施方式一:下面结合图1至图10说明本实施方式,本实施方式所述多轴支撑气浮平台的质心偏移容许干扰的测量与监控方法,所述多轴支撑气浮平台包括承载平台1,三条支撑腿2、三个气浮筒3和三个气足4,
所述承载平台1为圆形平台,承载平台1由三条支撑腿2支撑,三条支撑腿2与承载平台1下表面的三个连接点构成等边三角形,并且该等边三角形的中心与承载平台1的圆心重合;
每条支撑腿2的末端连接一个气浮筒3,每个气浮筒3的底端通过气浮球轴承连接一个气足4;
承载平台1上表面安装一个平面光栅7-1,该平面光栅7-1读数头与承载平台1上的负载固联;
所述测量与监控方法首先设定质心偏移量阈值,然后将质心偏移量G(x0,y0)与质心偏移量阈值进行比较,
当质心偏移量G(x0,y0)小于质心偏移量阈值时,按下述方法对支撑腿2的伸缩长度进行补偿:
所述质心偏移量G(x0,y0)的获得方法为:以承载平台1的圆心为原点建立两面直角坐标系,承载平台1的质心坐标为(0,0),将G(x0,y0)作为承载平台1与其上负载整体的质心,其中x0为质心偏移量G(x0,y0)在空间坐标系中X轴方向的坐标,y0为质心偏移量G(x0,y0)在空间坐标系中Y轴方向的坐标,采用平面光栅7-1测得承载平台1上面负载与承载平台1的相对位移量(x2,y2),则有:
式中M1为承载平台1的质量,M2为承载平台1上负载的质量;
质心偏移量G(x0,y0)对气足4气膜高度的影响按以下方法获得:
设定三条支撑腿2与承载平台1下表面的三个连接点为A、B和C,其中A点坐标为B点坐标为 C点坐标为
C点坐标为 式中L为三个连接点A、B和C形成的等边三角形的边长,
式中L为三个连接点A、B和C形成的等边三角形的边长,
当气浮平台处于静态平衡状态时,根据力系的主矢和对于坐标轴的主矩为零得到公式:
式中i=1、2和3,F1为对应于A点的支撑腿2上的负载力,F2为对应于A点的支撑腿2上的负载力,F3为对应于C点的支撑腿2上的负载力;Mx(Fi)为负载力Fi绕X轴的等效转矩,My(Fi)为负载力Fi绕Y轴的等效转矩,
将A、B和C三点坐标代入上述公式得到:
求解上式,获得F1、F2和F3的值:
由此获得当前对应于A点的支撑腿的承重质量m1、对应于B点的支撑腿的承重质量m2和对应于C点的支撑腿的承重质量m3,m1、m2和m3与质心G(x0,y0)的关系为:
式中M为承载平台1与其上负载整体的总质量;
最后获得质心偏移量G(x0,y0)与气足4的气膜高度矩阵:
式中h1为对应于A点的支撑腿2底部气足的气膜高度,h2为对应于B点的支撑腿2底部气足的气膜高度,h3为对应于C点的支撑腿2底部气足的气膜高度,G为承载平台1与其上负载整体的总重量,J为支撑腿2底部气足的气膜刚度;
气足的气膜高度变化使支撑轴2产生的高度变化通过倾角传感器7-4或者线阵CCD7-3的测量信号获得,对该测量信号进行处理,获得质心偏移量G(x0,y0)对承载平台1倾角干扰信息,由承载平台1倾角干扰信息计算获得各个支撑腿2调平所需的位移量,由此实现对气浮平台的质心偏移容许干扰的测量与补偿;
当质心偏移量G(x0,y0)大于质心偏移量阈值时,通过控制气足4的喷嘴喷气使承载平台1在水平混凝土基座上平动,跟随承载平台1上负载的运动以调整相对位移量(x2,y2),直到将质心偏移量G(x0,y0)调至质心偏移量阈值范围之内。
本实施方式中,所述多轴支撑气浮平台包括承载平台1,M条支撑腿2、M个气浮筒3和M个气足4,M为3、4、5或6,
所述承载平台1为圆形平台,承载平台1由M条支撑腿2支撑,M条支撑腿2与承载平台1下表面的M个连接点构成正M边形,并且该正M边形的中心与承载平台1的圆心重合。
多轴支撑气浮平台的测量控制系统包括负载反馈单元5、执行单元6、位置测量单元7、安全保护单元8、控制器9、旋转电机10和直线光源11,
负载反馈单元5包括M个压力传感器5-1和四个差动传感器5-2;执行单元6包括M个伺服音圈电机6-1和M个伺服音圈电机驱动器6-2;位置测量单元7包括平面光栅7-1、M个直线光栅7-2、线阵CCD7-3、倾角传感器7-4、M个电子水平仪7-5和室内GPS7-6;安全保护单元8包括2M个接近传感器8-1和M个温度传感器8-2,线阵CCD7-3由不少于六个CCD组成,
所述多轴支撑气浮平台设置于圆形水平混凝土基座上,线阵CCD7-3所包括的所有CCD沿圆形水平混凝土基座的圆周方向均匀放置,承载平台1上设置有旋转电机10,旋转电机10的上表面设置直线光源11,
每条支撑腿2内部安装有一个压力传感器5-1、一个伺服音圈电机6-1和一个直线光栅7-2,压力传感器5-1用来检测相应支撑腿2的力矩,伺服音圈电机6-1用来驱动相应的支撑腿2的伸缩,每个伺服音圈电机6-1由一个伺服音圈电机驱动器6-2驱动,直线光栅7-2用于采集伺服音圈电机6-1驱动支撑腿2所产生的位移,
四个差动传感器5-2沿承载平台1的圆周方向均匀分布在承载平台1的上表面外边缘上,差动传感器5-2用来测量承载平台1与承载平台1上的负载之间的相对位置,
平面光栅7-1安装在承载平台1的上表面,平面光栅7-1用于测量承载平台1上的负载相对承载平台1在两个相互垂直方向上发生的相对位移量;
倾角传感器7-4和M个电子水平仪7-5均安装在承载平台1的上表面上,倾角传感器7-4用于测量承载平台1移动过程中在空间坐标系的X方向和Y方向上的振动角度;M个电子水平仪7-5所处的位置分别对应于M条支撑腿2与承载平台1下表面的M个连接点,电子水平仪7-5用于测量承载平台1静止时的状态;
室内GPS7-6安装于相对圆形水平混凝土基座的上方空间,用于测量承载平台1在圆形水平混凝土基座上的位置坐标,
每条支撑腿2内部的上限行程和下限行程分别安装一个接近传感器8-1,接近传感器8-1用于实现限位报警;每个伺服音圈电机6-1内部安装一个温度传感器8-2,温度传感器8-2用于实现温度报警;
压力传感器5-1的压力信号输出端连接控制器9的压力信号输入端,差动传感器5-2的位置信号输出端连接控制器9的位置信号输入端,控制器9的驱动控制信号输出端连接伺服音圈电机驱动器6-2的驱动控制信号输入端,伺服音圈电机驱动器6-2的驱动信号输出端连接伺服音圈电机6-1的驱动信号输入端,伺服音圈电机6-1的驱动信号输出端连接支撑腿2的驱动信号输入端;
平面光栅7-1的相对位移信号输出端连接控制器9的相对位移信号输入端,直线光栅7-2的支撑腿位移信号输出端连接控制器9的支撑腿位移信号输入端,线阵CCD7-3的监测信号输出端连接控制器9的监测信号输入端,倾角传感器7-4的倾角信号输出端连接控制器9的倾角信号输入端,电子水平仪7-5的水平信号输出端连接控制器9的水平信号输入端,室内GPS7-6的GPS信号输出端连接控制器9的GPS信号输入端,
温度传感器8-2的温度信号输出端连接控制器9的温度信号输入端,接近传感器8-1的极限位置信号输出端连接控制器9的极限位置信号输入端。
本实施方式中气足4具有喷嘴,承载平台1采用气足4浮在水平混凝土基座上。利用气足4的喷嘴喷气可使承载平台1在基座上平动。
本实施方式中所使用的气足4是动压的,承载平台1依靠M个气足4支撑起来,为保证受力的均匀,M个气足结构相同,离中心的距离也相同。图5所示,气足4下端是一个环形结构,外圆半径R1,内圆半径R2,喷嘴分布在半径为R0的圆周上。
多轴支撑气浮平台的测量控制系统还包括上位机12和状态显示板13,
上位机12的信号传输端与控制器9的信号传输端连接,上位机12的显示信号输出端连接状态显示板13的显示信号输入端。
具体实施方式二:下面结合图1至图10说明本实施方式,本实施方式对实施方式一或二作进一步说明,本实施方式所述承载平台1的半径为2米,三条支撑腿与承载平台1下表面的三个连接点构成的等边三角形的顶点距离承载平台1圆心的距离为1.4米。
图3所示,多轴支撑气浮平台的支撑腿2与承载平台1下表面的三个连接点A、B、C三点连线构成一个边长为L=2424mm的等边三角形。气足4依靠压缩空气在气浮球轴承和球套之间形成气膜,实现近似无摩擦的运动,以模拟航天器在外层空间所受扰动力矩极小的动力学环境。
结合图1至图3所示,当承载平台1的半径为2米时,通过对圆形承载平台1进行有限元分析,得出三条支撑腿2与承载平台1的交点A、B、C三点构成的等边三角形顶点距离承载平台1圆心的距离为1.4m,此时,承载平台1各处均无变形。
所述支撑腿2为伸缩式可调节支撑腿。
本发明中,图3所示,在每条支撑腿2内部安装有一个伺服音圈电机6-1,伺服音圈电机6-1由伺服音圈电机驱动器6-2进行驱动,伺服音圈电机为执行机构,本发明中可选择高频响伺服音圈电机作为执行机构。伺服音圈电机可用来补偿承载平台1在振动过程中A、B、C三点的振幅,通过控制三个伺服音圈电机来补偿支撑腿2的伸缩量,以达到稳定承载平台1的目的。
所述伺服音圈电机的原理是带电线圈在磁场中产生力的作用,所以音圈电机具有零磁滞、零磁槽效应、高频响、高精度、高加速度、高速度、力特性好、控制方便、体积小和分辨率高等优点。根据驱动、反馈、控制器和控制算法等配置高低,音圈电机一般可以达到500-1000Hz的运动频率,甚至更高。音圈电机的驱动可消除传统驱动中间环节带来的影响。
差动传感器5-2用来测量承载平台1与承载平台1上的负载之间的相对位置,,为承载平台1在圆形水平混凝土基座上平动提供位置信息。压力传感器5-1检测支撑腿2力矩的大小,用以防止支撑腿2在内部故障或外部因素的影响下,已处于卡死状态时,伺服音圈电机6-1仍然强行驱动支撑腿运动等故障的出现,从而防止伺服音圈电机过载。接近传感器8-1在伺服音圈电机6-1超出行程时实现限位报警;温度传感器8-2在伺服音圈电机6-1的温度过高超过其承受范围时,实现温度报警,系统进而做出响应。安全保护单元8用来保证平台测量控制系统在运行过程中硬件的安全运行。
直线光栅7-2为非接触式光栅,直线光栅7-2用于实现对伺服音圈电机移动位置信号的采集并反馈给控制器;平面光栅7-1测量获得的承载平台1上的负载相对承载平台1在两个相互垂直方向上发生的相对位移量用来计算相对位移造成的质心偏移干扰。
旋转电机10带动直线光源11旋转时,线阵CCD7-3和室内GPS7-6构成了水平动态倾角测量系统,用来测量并反馈承载平台1动态过程中的倾角。线阵CCD7-3所包括的所有CCD沿圆形水平混凝土基座的圆周方向均匀放置,是为了减少由于物体遮光的影响造成一部分CCD接收不到光线,导致倾角信息不全面,不能更好的调平承载平台1。
倾角传感器7-4为双轴倾角传感器,它能够获得多轴支撑气浮平台在平动或静止状态时的倾角,起到平台倾斜角监视和超限保护的作用,保证承载平台1倾角保持在线阵CCD的监测范围之内。
上位机12和状态显示板13通过以太网相连接,状态显示板13用于实时显示当前各支撑腿运动状态、伺服音圈电机温度等状态信息。
图3所示,定义Z向垂直于地平面,X、Y方向符合右手定则;Rx、Ry、Rz为承载平台1分别沿X、Y、Z的转动方向;气足4的气浮球轴承能够实现承载平台1Rx向、Ry向和Rz向的有限摆角自由转动,伺服音圈电机实现对包含气浮球轴承和承载平台1重力的卸载以及保证承载平台1在Z向的长距离自由浮动。X、Y、Z轴可以实现长距离自由运动;Rz轴可以绕Z轴0~360°自由转动;Rx、Ry分别可以绕X,Y轴-30~30°自由转动。承载平台1需要具有6自由度,气足4在圆形水平混凝土基座上能够实现二维自由平动。承载平台1在稳定调节的过程中,在不需要调节承载平台1高度时,如图3所示,以A点为参考原点建立坐标系,主要通过调节B、C两点的Z坐标达到稳定的目的。
多轴支撑气浮平台的测量控制系统是一种实时动态调平系统,其控制框图如图9所示。测量控制系统采用双环结构:内环为三个伺服音圈电机的位置控制环,其输入信号为各支撑腿2调平时所需的位移量构成的三维向量;外环为角度控制环,其输入信号为二维零向量。测量控制系统的位置控制和角度控制均采用闭环控制。位置控制环部分包括三个支撑腿2上的位置环控制器、电机驱动器、音圈电机、以及直线光栅,其中位置反馈是通过直线光栅测量实现的。角度控制环部分主要包括角度环控制器、倾角传感器、线阵CCD以及室内GPS。其中承载平台1输出角度包括两个反馈通道:一是通过倾角传感器的测量结果直接实现反馈;二是根据线阵CCD和室内GPS的测量结果计算得到平台倾角而完成反馈。由于承载平台1的动态调平功能是通过控制三个支撑腿2上的音圈电机实现的,因此角度环控制器的输出控制量需要经过解算得到三个音圈电机的位置控制输入量,即通过倾角位移变换矩阵进行变换。在利用线阵CCD和室内GPS进行倾角反馈时,需要将线阵CCD输出的光点高度结合室内GPS测量的承载平台坐标进行计算获得当前的承载平台倾角,即通过高度倾角变换矩阵进行变换。
下面分析多轴支撑气浮平台的干扰信号的成分及其影响,干扰信号主要包括质心偏移干扰和地面平面度干扰。地面平面度干扰通常是小振幅、低频率的正弦波信号。下面主要分析质心偏移干扰造成的影响。
质心偏移干扰主要包括两个方面:一是导致音圈电机负载发生变化;二是对各气足4的气膜高度产生影响。由于三个支撑腿2上音圈电机的负载为承台平台1在各个支撑腿2上的分布载荷,因此当承载平台1因为上面设备发生相对位移而导致质心偏移时各个音圈电机的负载会发生变化,故需要考虑质心偏移对各音圈电机负载变化的影响。
上述质心偏移容许干扰的测量与监视方法中,承载平台1的质心坐标为(0,0)为忽略承载平台1上的负载影响近似获得的。它是为了通过实验获得承载平台上负载容许的移动范围,以保证在调平过程中质心偏移造成的干扰始终限制在容许范围之内。
质心坐标G(x0,y0)与气足4的气膜高度的关系即反应了质心偏移对气膜高度的影响,该影响会直接反应为各支撑轴2的高度,最终表现为影响承载平台1的平面倾斜角度。承载平台1的倾角信息是通过倾角传感器测量输出或者通过线阵CCD的光点测量信息进行计算得到。如此,质心发生偏移造成的对承载平台1倾角的干扰就包含在倾角测量反馈通道的倾角信息中,能够通过倾角传感器或线阵CCD的反馈直接被控制器9读取。然后,控制器9再将其解算获得各个支撑腿2调平所需的位移量,最后再对电机进行伺服控制,达到调平的目的。
因为质心偏移的干扰反映到了音圈电机负载和承载平台1的倾角测量中。因此,当质心偏移超过一定限度时,音圈电机的负载变化量会比较大,另一方面对平台倾角的施加的干扰也会较大,往往会造成自动调平系统控制性能不理想的后果。因此,可以通过重复性实验获得自动调平平台所容许的负载与承载平台1的最大相对位移量。然后通过在承载平台1上安装可调限位装置对承载设备的移动范围进行约束,以使因相对位移产生的质心偏移造成的干扰始终保持在容许范围之内,起到对质心偏移干扰的监视作用,保证多轴支撑气浮平台的测量控制系统始终有较理想的控制性能。
工作原理:
将多轴支撑气浮平台放在大面积圆形水平混凝土基座上,当多轴支撑气浮平台处于静止状态时,多轴支撑气浮平台利用放置在承载平台1上的电子水平仪以及放置在水平混凝土基座上的线阵CCD结合室内GPS通过计算来测量自身的水平度。用旋转电机带动承载平台1上的直线光源快速旋转,在此光源的光束扫描过程中,线阵CCD可根据记录光点的位置计算承载平台1的俯仰角度,为控制器提供反馈信息。
由混凝土基座周围的线阵CCD实时测量光点的高度,由室内GPS实时测量承载平台1在混凝土基座中的位置信息。当旋转光源高速扫过两个相邻的线阵CCD时,两个相邻CCD上的光电位置以及光源构成一个平面,如图8中的平面α。由于光源旋转速度较高,旋转光源扫过两个相邻线阵CCD的时间间隔极小,因此可将平面α近似看作承载平台1当前所在的平面。因此,可以将相邻CCD上的光点坐标以及承载平台1的位置坐标分别通过线阵CCD和室内GPS反馈给控制器。然后,控制器经过几何关系换算可计算得到承载平台1在两个垂直方向上的倾角,然后根据倾角信息解算将获得各个支撑腿2的实际位移偏移量,再控制伺服音圈电机来驱动支撑腿2伸缩,做出上移或者是下移运动,以进行相应补偿,调整承载平台1的水平度。伺服音圈电机通过非接触式光栅尺的测量数据来保证位移精度,从而保障支撑腿2的定位精度。在此过程中,负载反馈单元和安全保护单元能够实时监测多轴支撑气浮平台状态并及时做出响应。承载平台1在运动过程中通过与静止状态时同样的方式,对支撑腿进行伸缩驱动以对采集获得的偏移量做出相应补偿,保证了承载平台的水平精度。
调节三个支撑腿2的伸长量使承载平台1达到水平,倾角传感器的安装方式与3条支撑腿之间的位置关系如图7所示。倾角传感器的两个相互垂直的轴,即x和y轴需要分别与AB、CD1平行。
当承载平台1处于静止状态时,控制器发出静止状态模式并进入伺服周期,旋转电机带动直线光源在承载平台1中间快速旋转,在光束扫描过程中,线阵CCD可根据记录光点的位置计算承载平台1的俯仰角度,为调平系统提供反馈信息。如果承载平台1为水平,那么线阵CCD中各CCD扫描到的位置为同一位置高度;如果承载平台1不水平,那么不水平的角度方向会伴随线阵CCD有扫描高度的偏移,如果承载平台1向上倾斜,那么对应光点的位置高度会偏上;如果承载平台1向下倾斜,那么对应光点的位置高度会偏下,线阵CCD反馈的平台倾角信息和电子水平仪检测出平台倾角信息反馈给控制器,控制器在伺服周期内对传感器数据进行融合和几何处理转化为支撑腿的位移信息发送给执行机构模块。
在实际控制过程中,控制器接收到线阵CCD的光点高度信息后,需要结合室内GPS测量的承载平台1的坐标信息进行计算得到承载平台1在两个相互垂直方向上的倾角,然后再对倾角进行解耦,得到三个支撑腿2调平所需的位移量。
多轴支撑气浮平台的调平方法通过多轴支撑气浮平台的测量控制系统实现调平,所述调平方法包括以下步骤:
步骤一、通过上位机12将当前的工作模式、控制命令和误差参数通过以太网发送给控制器9;
步骤二、控制器9每200μs发出伺服周期开始信号,启动平动状态工作模式或静止状态工作模式;若启动平动状态工作模式,则执行步骤三;若启动静止状态工作模式,则执行步骤五:
步骤三、检查控制器9是否接收到线阵CCD7-3的监测信号,若是,执行步骤四;否则,执行步骤六;
步骤四、控制器9根据线阵CCD7-3输出的监测信号和室内GPS7-6输出的GPS信号,计算获得承载平台1的倾角信息,然后执行步骤六;
步骤五、位置测量单元7中的电子水平仪7-5和线阵CCD7-3检测承载平台1的水平度,并将水平度信息传递给控制器9,然后执行步骤七;
步骤六、控制器9对其读取的所有反馈信号进行数据融合处理,获得支撑腿2的调节量,然后控制器9通过驱动伺服音圈电机驱动器6-2对伺服音圈电机6-1的驱动信号进行修正,然后执行步骤八;
步骤七、控制器9对其读取的所有反馈信号进行数据融合处理,获得支撑腿2的调节量,然后控制器9通过驱动伺服音圈电机驱动器6-2对伺服音圈电机6-1的驱动信号进行修正,然后执行步骤九;
步骤八、判断承载平台1是否静止,若是,执行步骤五;否则,执行步骤十;
步骤九、判断承载平台1的水平度是否达到设定精度范围之内,若是,则执行步骤十一;否则,返回步骤五;
步骤十、判断承载平台1的水平度是否达到设定精度范围之内,若是,则执行步骤十一;否则,返回步骤三;
步骤十一、当前伺服周期调平结束,返回步骤二,等待下一个伺服周期,直至结束。
M为3,此时步骤六和步骤七中所述控制器9对其读取的所有反馈信号进行数据融合处理,获得支撑腿2的调节量的具体方法为:
设定线阵CCD7-3由六个CCD组成,将圆形水平混凝土基座上的六个CCD沿圆周方向顺序编号为①、②、③、④、⑤和⑥,以④号CCD和①号CCD的中心连线做为空间直角坐标系的X轴方向,该空间直角坐标系位于直线光源11的基准光所在的水平面X-0-Y上,按照右手定则定义空间直角坐标系的Y轴方向和Z轴方向,设定圆形水平混凝土基座的半径为R,直线光源11在③号CCD上的位置坐标为 H3为旋转光源在③号CCD上照射的光点高度,直线光源11在④号CCD上的位置坐标为B1(-R,0,H4),H4为旋转光源在④号CCD上照射的光点高度,设定K点为③号CCD上基准光点的位置,J点为④号CCD上基准光点的位置,承载平台1中心位置点的坐标为C1(x01,y01,0),
H3为旋转光源在③号CCD上照射的光点高度,直线光源11在④号CCD上的位置坐标为B1(-R,0,H4),H4为旋转光源在④号CCD上照射的光点高度,设定K点为③号CCD上基准光点的位置,J点为④号CCD上基准光点的位置,承载平台1中心位置点的坐标为C1(x01,y01,0),
过K点作X轴的垂线,垂足为H,KH与C1J相交于D点,作DE垂直于X-0-Y平面,交C1B1于点E;过点E作EL1//DK,交A1K于点L1,∠A1EL1即平面α绕X轴旋转产生的夹角θx,平面α为A1、B1和C1三点所确定的平面,
作C1F垂直于DK,交DK于点F;再作DK的垂线FG,交A1E于点G,连接C1G,∠GC1F即平面α绕Y轴旋转产生的夹角θy,过C1点作X轴的垂线,垂足为I,由
由HD为三角形JIC1的中位线得
故有
做FM垂直于EL1,垂足为M,由坐标关系可知:
由 得
因此,
根据坐标关系得到:
则:
再根据计算获得的θx和θy进行解耦,
以前述方式建立气浮平台的空间直角坐标系,其原点为伺服音圈电机6-1最大位移输出的1/2处,设定三条支撑腿2与承载平台1下表面的三个连接点为A、B和C,A点坐标为(0,0,z1),B点坐标为(-L,0,z2),C点坐标为 式中z1表示A点在空间直角坐标系中Z轴的坐标值,z2表示B点在空间直角坐标系中Z轴的坐标值,z3表示C点在空间直角坐标系中Z轴的坐标值,
式中z1表示A点在空间直角坐标系中Z轴的坐标值,z2表示B点在空间直角坐标系中Z轴的坐标值,z3表示C点在空间直角坐标系中Z轴的坐标值,
根据A、B、C三点的坐标关系,可得:
设定z1+z2+z3=0,
求解上式获得:
所获得的z1、z2、z3的值即为调平过程中,三个支撑腿2上各个伺服音圈电机6-1的伺服控制输入量,即支撑腿2的位移控制量。
本发明中,控制器采用运动控制卡实现。控制器接收到上位机12的控制信号后,对控制信号进行参数解析,设置系统时钟、初始化中断、初始化GPIO口、初始化变量、控制参数设置等系统初始化工作。
调平方法在执行过程中,始终通过接近传感器8-1监测伺服音圈电机运动位移是否超出行程阈值,若是,通过控制器9控制伺服音圈电机驱动器6-2停止驱动;同时通过温度传感器8-2监测伺服音圈电机的内部温度是否超过温度阈值,若是,通过控制器9控制伺服音圈电机驱动器6-2停止驱动,对伺服音圈电机驱动器6-2进行安全保护。
Claims (2)
1.一种多轴支撑气浮平台的质心偏移容许干扰的测量与监控方法,其特征在于,所述多轴支撑气浮平台包括承载平台(1),三条支撑腿(2)、三个气浮筒(3)和三个气足(4),
所述承载平台(1)为圆形平台,承载平台(1)由三条支撑腿(2)支撑,三条支撑腿(2)与承载平台(1)下表面的三个连接点构成等边三角形,并且该等边三角形的中心与承载平台(1)的圆心重合;
每条支撑腿(2)的末端连接一个气浮筒(3),每个气浮筒(3)的底端通过气浮球轴承连接一个气足(4);
承载平台(1)上表面安装一个平面光栅(7-1),该平面光栅(7-1)读数头与承载平台(1)上的负载固联;
所述测量与监控方法首先设定质心偏移量阈值,然后将质心偏移量G(x0,y0)与质心偏移量阈值进行比较,
当质心偏移量G(x0,y0)小于质心偏移量阈值时,按下述方法对支撑腿(2)的伸缩长度进行补偿:
所述质心偏移量G(x0,y0)的获得方法为:以承载平台(1)的圆心为原点建立两面直角坐标系,承载平台(1)的质心坐标为(0,0),将G(x0,y0)作为承载平台(1)与其上负载整体的质心,其中x0为质心偏移量G(x0,y0)在空间坐标系中X轴方向的坐标,y0为质心偏移量G(x0,y0)在空间坐标系中Y轴方向的坐标,采用平面光栅(7-1)测得承载平台(1)上面负载与承载平台(1)的相对位移量(x2,y2),则有:
式中M1为承载平台(1)的质量,M2为承载平台(1)上负载的质量;
质心偏移量G(x0,y0)对气足(4)气膜高度的影响按以下方法获得:
设定三条支撑腿(2)与承载平台(1)下表面的三个连接点为A、B和C,其中A点坐标为 B点坐标为C点坐标为
B点坐标为C点坐标为 式中L为三个连接点A、B和C形成的等边三角形的边长,
式中L为三个连接点A、B和C形成的等边三角形的边长,
当气浮平台处于静态平衡状态时,根据力系的主矢和对于坐标轴的主矩为零得到公式:
式中i=1、2和3,F1为对应于A点的支撑腿(2)上的负载力,F2为对应于A点的支撑腿(2)上的负载力,F3为对应于C点的支撑腿(2)上的负载力;Mx(Fi)为负载力Fi绕X轴的等效转矩,My(Fi)为负载力Fi绕Y轴的等效转矩,
将A、B和C三点坐标代入上述公式得到:
求解上式,获得F1、F2和F3的值:
由此获得当前对应于A点的支撑腿的承重质量m1、对应于B点的支撑腿的承重质量m2和对应于C点的支撑腿的承重质量m3,m1、m2和m3与质心G(x0,y0)的关系为:
式中M为承载平台(1)与其上负载整体的总质量;
最后获得质心偏移量G(x0,y0)与气足(4)的气膜高度矩阵:
式中h1为对应于A点的支撑腿(2)底部气足的气膜高度,h2为对应于B点的支撑腿(2)底部气足的气膜高度,h3为对应于C点的支撑腿(2)底部气足的气膜高度,G为承载平台(1)与其上负载整体的总重量,J为支撑腿(2)底部气足的气膜刚度;
气足的气膜高度变化使支撑轴(2)产生的高度变化通过倾角传感器(7-4)或者线阵CCD(7-3)的测量信号获得,对该测量信号进行处理,获得质心偏移量G(x0,y0)对承载平台(1)倾角干扰信息,由承载平台(1)倾角干扰信息计算获得各个支撑腿(2)调平所需的位移量,由此实现对气浮平台的质心偏移容许干扰的测量与补偿;
当质心偏移量G(x0,y0)大于质心偏移量阈值时,通过控制气足(4)的喷嘴喷气使承载平台(1)在水平混凝土基座上平动,跟随承载平台(1)上负载的运动以调整相对位移量(x2,y2),直到将质心偏移量G(x0,y0)调至质心偏移量阈值范围之内。
2.根据权利要求1所述的多轴支撑气浮平台的质心偏移容许干扰的测量与监控方法,其特征在于,所述承载平台(1)的半径为2米,三条支撑腿与承载平台(1)下表面的三个连接点构成的等边三角形的顶点距离承载平台(1)圆心的距离为1.4米。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201310187795.7A CN103309355B (zh) | 2013-05-20 | 2013-05-20 | 多轴支撑气浮平台的质心偏移容许干扰的测量与监控方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201310187795.7A CN103309355B (zh) | 2013-05-20 | 2013-05-20 | 多轴支撑气浮平台的质心偏移容许干扰的测量与监控方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN103309355A true CN103309355A (zh) | 2013-09-18 |
| CN103309355B CN103309355B (zh) | 2015-07-22 |
Family
ID=49134678
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201310187795.7A Active CN103309355B (zh) | 2013-05-20 | 2013-05-20 | 多轴支撑气浮平台的质心偏移容许干扰的测量与监控方法 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN103309355B (zh) |
Cited By (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN103488191A (zh) * | 2013-09-27 | 2014-01-01 | 浙江水利水电学院 | 一种分布式调平控制器电路 |
| WO2014187237A1 (zh) * | 2013-05-20 | 2014-11-27 | 哈尔滨工业大学 | 多轴支撑气浮平台的测量控制系统 |
| CN104763868A (zh) * | 2015-04-22 | 2015-07-08 | 天津航天机电设备研究所 | 气浮支撑平台用高度调节机构 |
| CN104848839A (zh) * | 2015-05-07 | 2015-08-19 | 哈尔滨工业大学 | 一种多轴支撑气浮平台水平测量装置 |
| CN106382301A (zh) * | 2016-10-17 | 2017-02-08 | 哈尔滨工业大学 | 气悬浮系统的多气足过定位水平共面调节方法 |
| CN107263530A (zh) * | 2017-05-25 | 2017-10-20 | 深圳市越疆科技有限公司 | 升降驱动机构以及平面关节机器人 |
| CN108557117A (zh) * | 2018-03-12 | 2018-09-21 | 上海卫星工程研究所 | 气膜密封的气浮物理仿真平台的非接触供气装置及方法 |
| CN110316275A (zh) * | 2019-07-11 | 2019-10-11 | 广东博智林机器人有限公司 | 一种多支撑腿单元行走平台及其控制方法 |
| CN110576921A (zh) * | 2019-09-11 | 2019-12-17 | 广东博智林机器人有限公司 | 一种带有匀速器的多支撑腿单元行走机器人及其控制方法 |
| CN111714208A (zh) * | 2020-06-30 | 2020-09-29 | 深圳市精锋医疗科技有限公司 | 手术机器人及其控制装置、控制方法 |
| CN112899118A (zh) * | 2019-11-19 | 2021-06-04 | 周口师范学院 | 一种用于微生物培养的摇床 |
| CN114111601A (zh) * | 2021-12-07 | 2022-03-01 | 合肥工业大学智能制造技术研究院 | 一种利用线阵ccd技术检测装配孔位置偏移量的方法 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH08166043A (ja) * | 1994-10-11 | 1996-06-25 | Nikon Corp | 防振装置 |
| CN1654288A (zh) * | 2004-02-13 | 2005-08-17 | 三星电子株式会社 | 运输装置 |
| CN2756933Y (zh) * | 2004-12-23 | 2006-02-08 | 中国电子科技集团公司第三十八研究所 | 电子设备用地面机动工作台 |
| JP2006113854A (ja) * | 2004-10-15 | 2006-04-27 | Yaskawa Electric Corp | 位置決め制御装置および位置決め制御方法 |
| CN103047514A (zh) * | 2012-12-19 | 2013-04-17 | 哈尔滨工业大学 | 基于气浮零位基准和激光自准直测量的气浮隔振平台 |
-
2013
- 2013-05-20 CN CN201310187795.7A patent/CN103309355B/zh active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH08166043A (ja) * | 1994-10-11 | 1996-06-25 | Nikon Corp | 防振装置 |
| CN1654288A (zh) * | 2004-02-13 | 2005-08-17 | 三星电子株式会社 | 运输装置 |
| JP2006113854A (ja) * | 2004-10-15 | 2006-04-27 | Yaskawa Electric Corp | 位置決め制御装置および位置決め制御方法 |
| CN2756933Y (zh) * | 2004-12-23 | 2006-02-08 | 中国电子科技集团公司第三十八研究所 | 电子设备用地面机动工作台 |
| CN103047514A (zh) * | 2012-12-19 | 2013-04-17 | 哈尔滨工业大学 | 基于气浮零位基准和激光自准直测量的气浮隔振平台 |
Cited By (18)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2014187237A1 (zh) * | 2013-05-20 | 2014-11-27 | 哈尔滨工业大学 | 多轴支撑气浮平台的测量控制系统 |
| CN103488191B (zh) * | 2013-09-27 | 2016-01-20 | 浙江水利水电学院 | 一种分布式调平控制器电路 |
| CN103488191A (zh) * | 2013-09-27 | 2014-01-01 | 浙江水利水电学院 | 一种分布式调平控制器电路 |
| CN104763868A (zh) * | 2015-04-22 | 2015-07-08 | 天津航天机电设备研究所 | 气浮支撑平台用高度调节机构 |
| CN104763868B (zh) * | 2015-04-22 | 2016-08-17 | 天津航天机电设备研究所 | 气浮支撑平台用高度调节机构 |
| CN104848839A (zh) * | 2015-05-07 | 2015-08-19 | 哈尔滨工业大学 | 一种多轴支撑气浮平台水平测量装置 |
| CN106382301A (zh) * | 2016-10-17 | 2017-02-08 | 哈尔滨工业大学 | 气悬浮系统的多气足过定位水平共面调节方法 |
| CN107263530B (zh) * | 2017-05-25 | 2024-01-12 | 深圳市越疆科技有限公司 | 升降驱动机构以及平面关节机器人 |
| CN107263530A (zh) * | 2017-05-25 | 2017-10-20 | 深圳市越疆科技有限公司 | 升降驱动机构以及平面关节机器人 |
| CN108557117A (zh) * | 2018-03-12 | 2018-09-21 | 上海卫星工程研究所 | 气膜密封的气浮物理仿真平台的非接触供气装置及方法 |
| CN108557117B (zh) * | 2018-03-12 | 2020-03-06 | 上海卫星工程研究所 | 气膜密封的气浮物理仿真平台的非接触供气装置及方法 |
| CN110316275A (zh) * | 2019-07-11 | 2019-10-11 | 广东博智林机器人有限公司 | 一种多支撑腿单元行走平台及其控制方法 |
| CN110576921A (zh) * | 2019-09-11 | 2019-12-17 | 广东博智林机器人有限公司 | 一种带有匀速器的多支撑腿单元行走机器人及其控制方法 |
| CN112899118A (zh) * | 2019-11-19 | 2021-06-04 | 周口师范学院 | 一种用于微生物培养的摇床 |
| CN111714208A (zh) * | 2020-06-30 | 2020-09-29 | 深圳市精锋医疗科技有限公司 | 手术机器人及其控制装置、控制方法 |
| CN111714208B (zh) * | 2020-06-30 | 2023-08-22 | 深圳市精锋医疗科技股份有限公司 | 手术机器人及其控制装置、控制方法 |
| CN114111601A (zh) * | 2021-12-07 | 2022-03-01 | 合肥工业大学智能制造技术研究院 | 一种利用线阵ccd技术检测装配孔位置偏移量的方法 |
| CN114111601B (zh) * | 2021-12-07 | 2024-01-30 | 合肥工业大学智能制造技术研究院 | 一种利用线阵ccd技术检测装配孔位置偏移量的方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN103309355B (zh) | 2015-07-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN103292127B (zh) | 多轴支撑气浮平台的测量控制系统 | |
| CN103292130B (zh) | 多轴支撑气浮平台的调平方法 | |
| CN103277644B (zh) | 多轴支撑气浮平台 | |
| CN103309355B (zh) | 多轴支撑气浮平台的质心偏移容许干扰的测量与监控方法 | |
| CN103234512B (zh) | 三轴气浮台高精度姿态角度及角速度测量装置 | |
| CN102278989B (zh) | 一种多功能航空遥感三轴惯性稳定平台系统 | |
| CN104075890B (zh) | 一种伺服电机及谐波减速机综合测试平台 | |
| CN104204717B (zh) | 确定用于监测流体轴承和具有至少一个流体轴承的机器的校正值的方法 | |
| CN205852787U (zh) | 一种具有位姿自检功能的多轴调节平台 | |
| CN101825461B (zh) | 基于圆柱形模型的平台调平装置 | |
| CN103984350A (zh) | 防倾倒移动装置及其防倾倒方法 | |
| CN209910944U (zh) | 一种风洞天平测力试验准备装置 | |
| CN101958154A (zh) | 基于机器视觉的平台自动调平装置 | |
| CN104990533B (zh) | 卫星地面物理仿真系统超高精度姿态测量方法及装置 | |
| CN103792896A (zh) | 集成的重型机械智能臂架控制系统及控制方法 | |
| CN107255509B (zh) | 一种四点法的质量特性测量系统 | |
| CN103868648A (zh) | 三轴气浮仿真实验平台的质心测量方法 | |
| CN104776822A (zh) | 多节臂架的姿态检测系统和方法 | |
| CN206627632U (zh) | 一种激光云台智能空间定位系统 | |
| CN103983247A (zh) | 基于二次平台线阵ccd的倾角测量方法 | |
| CN105015805A (zh) | 一种二次平台系统 | |
| CN105444722A (zh) | 检测平台姿态变化的方法 | |
| CN107588892A (zh) | 一种仪表板总成质量质心测量系统及测量方法 | |
| CN103512493A (zh) | 位置测量装置 | |
| CN104848839A (zh) | 一种多轴支撑气浮平台水平测量装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant |