CN103207570A - 应用于装卸料机模拟机的旋转变压器信号仿真系统和方法 - Google Patents
应用于装卸料机模拟机的旋转变压器信号仿真系统和方法 Download PDFInfo
- Publication number
- CN103207570A CN103207570A CN2013100687989A CN201310068798A CN103207570A CN 103207570 A CN103207570 A CN 103207570A CN 2013100687989 A CN2013100687989 A CN 2013100687989A CN 201310068798 A CN201310068798 A CN 201310068798A CN 103207570 A CN103207570 A CN 103207570A
- Authority
- CN
- China
- Prior art keywords
- signal
- signals
- rotary transformer
- manipulator crane
- fuel manipulator
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Granted
Links
Images


Landscapes
- Control Of Electric Motors In General (AREA)
- Monitoring And Testing Of Nuclear Reactors (AREA)
Abstract
本发明公开了一种应用于装卸料机模拟机的旋转变压器信号仿真系统和方法,首先采集控制台的仿真信号接收设备发出的正弦激励信号和大车、小车或者主提升手柄的速度和运行方向信号,计算旋转变压器的输入角度数值;根据旋转变压器的输出传递函数对输入角度数值和正弦激励信号进行转换,得到输出到仿真信号接收设备的旋转变压器仿真信号,完成仿真模拟过程。该系统及方法可根据实际需要对装卸料机模拟机的旋转变压器信号实现灵活控制,仿真模拟不同工况,不再依赖真实的电机硬件设备,采用这种全新的设计思路研发的装卸料机模拟机与过去相比具有更好的经济性,同时使得装卸料机模拟机更易于操作和布置,提高了核电站装卸料机操作员的培训效率。
Description
技术领域
本发明涉及核电站装卸料机的模拟仿真控制领域,具体涉及一种应用于装卸料机模拟机的旋转变压器信号仿真系统和方法。
背景技术
装卸料机是核电站停堆换料期间完成反应堆换料的关键设备,在反应堆堆芯和燃料转运装置倾翻机(RX侧)之间水下装卸、转运燃料组件,其服务区域是反应堆换料水池和堆内构件存放池。从国内外核电站的装卸料机使用经验来看,在核电站机组运行期间,装卸料机停放在反应堆厂房内,无法使用装卸料机对操作员进行实际操作培训。此时装卸料机上的控制台被拆卸下来并转移至某个专用房间中,与装卸料机模拟机相连,形成一个完整的装卸料机操作培训系统,对装卸料机操作员进行相关的操作培训。
目前国内外核电站的装卸料机模拟机都采用了全实物1:1的设计,即电机(带旋转变压器)、编码器、限位开关都采用了实体硬件设备。这种设计思想既不利于整个控制系统的布置又不能灵活仿真模拟各种运行工况,且缺乏很好的经济性。基于上述缺陷,本发明采用一种全新的设计思路进行装卸料机模拟机的研发,利用软件方法进行旋转变压器(RESOLVER)信号的仿真模拟,摆脱装卸料机模拟机以往对于电机硬件设备的依赖,可以很好的弥补以前核电站装卸料机模拟机设计中存在的不足。
发明内容
针对现有技术中存在的缺陷,本发明的目的在于提供一种应用于装卸料机模拟机的旋转变压器信号仿真系统和方法,提高核电站装卸料机操作员的培训效率。
为实现上述目的,本发明采用的技术方案如下:
一种应用于装卸料机模拟机的旋转变压器信号仿真系统,包括正弦激励信号采集模块、与正弦激励信号采集模块连接的仿真信号生成模块、以及与仿真信号生成模块连接的仿真信号输出模块,该系统还包括速度采集模块、以及与速度采集模块连接的旋转变压器输入角度计算模块,旋转变压器输入角度计算模块与仿真信号生成模块连接,其中:
正弦激励信号采集模块用于采集装卸料机控制台的旋转变压器信号接收设备发出的正弦激励信号,并将信号发送到仿真信号生成模块;
速度采集模块用于采集装卸料机大车、小车或者主提升手柄发出的速度信号和运行方向信号,并根据采集到的速度信号计算得到装卸料机大车、小车或者主提升当前的速度数值;
旋转变压器输入角度计算模块用于根据真实电机的速度角度计算公式计算装卸料机大车、小车或主提升的速度数值所对应的装卸料机大车旋转变压器、小车旋转变压器或主提升旋转变压器的输入角度数值,根据所述的运行方向信号确定输入角度数值的正负;
仿真信号生成模块用于根据采集到的正弦激励信号和旋转变压器的输入角度数值计算得到旋转变压器仿真信号;
仿真信号输出模块用于将旋转变压器仿真信号输出到装卸料机控制台的旋转变压器信号接收设备。
进一步,如上所述的一种应用于装卸料机模拟机的旋转变压器信号仿真系统,所述的旋转变压器信号接收设备为装卸料机控制台的电机驱动器。
进一步,如上所述的一种应用于装卸料机模拟机的旋转变压器信号仿真系统,所述的速度角度计算公式是根据真实的电机额定转速所对应的装卸料机额定速度计算出来的。
进一步,如上所述的一种应用于装卸料机模拟机的旋转变压器信号仿真系统,所述的仿真信号生成模块包括:
角弧度转换单元:用于将所述的输入角度数值转换为弧度数值;
输入数值计算模块:用于将所述弧度数值根据预设的数学公式计算得到旋转变压器信号传递函数所需的输入数值;
正余弦数值计算单元:用于根据旋转变压器信号传递函数计算得到输入数值所对应的正弦数值和余弦数值;
信号转换单元:用于将所述的正弦激励信号转换为符合旋转变压器信号传递函数的正弦激励信号;
仿真信号计算单元:用于根据正弦数值和余弦数值、以及符合旋转变压器信号传递函数的正弦激励信号计算得到旋转变压器仿真信号。
再进一步,如上所述的一种应用于装卸料机模拟机的旋转变压器信号仿真系统,所述的旋转变压器仿真信号包括正弦波仿真信号和余弦波仿真信号。
更进一步,如上所述的一种应用于装卸料机模拟机的旋转变压器信号仿真系统,仿真信号输出模块(13)根据所述的角度数值的方向正向或反向输出旋转变压器仿真信号。
一种应用于装卸料机模拟机的旋转变压器信号仿真方法,包括以下步骤:
(一)采集装卸料机控制台的旋转变压器信号接收设备发出的正弦激励信号;
(二)采集装卸料机大车、小车或者主提升手柄发出的速度信号和运行方向信号,并根据采集到的速度信号计算得到装卸料机大车、小车或者主提升手柄当前行程位置所对应的速度数值;
(三)根据真实电机的速度角度计算公式计算装卸料机大车、小车或主提升的速度数值所对应的装卸料机大车旋转变压器、小车旋转变压器或主提升旋转变压器的输入角度数值,根据所述的运行方向信号确定输入角度数值的方向;
(四)根据所述的输入角度数值和正弦激励信号依据旋转变压器的传递函数计算得到旋转变压器仿真信号;
(五)根据设定的循环时间周期将旋转变压器仿真信号输出到旋转变压器信号接收设备。
再进一步,如上所述的一种应用于装卸料机模拟机的旋转变压器信号仿真方法,步骤(四)中,根据所述的输入角度数值和正弦激励信号计算得到旋转变压器仿真信号的具体方式为:
a.将输入角度数值转换为弧度数值;
b.将弧度数值利用预设的数学公式进行计算,得到旋转变压器信号传递函数所需的输入数值;
c.根据旋转变压器信号传递函数计算输入数值所对应的正弦数值和余弦数值;
d.将所述的正弦激励信号计算得到符合旋转变压器信号传递函数的正弦激励信号;
e.根据所述的正弦数值和余弦数值、以及符合旋转变压器信号传递函数的正弦激励信号计算得到旋转变压器仿真信号。
更进一步,如上所述的一种应用于装卸料机模拟机的旋转变压器信号仿真方法,步骤e中,将所述的正弦数值和余弦数值分别与符合旋转变压器信号传递函数的正弦激励信号相乘得到旋转变压器仿真信号。
本发明的有益效果在于:本发明所述的仿真系统及方法可根据实际需要对装卸料机模拟机的旋转变压器仿真信号实现灵活控制,仿真模拟不同工况,不再依赖真实的编码器硬件设备,采用这种全新的设计思路研发的装卸料机模拟机与过去相比具有更好的经济性,同时使得装卸料机模拟机更易于操作和布置,从而提高了核电站装卸料机操作员的培训效率,可应用于各种核电站堆型的同类设备模拟机。
附图说明
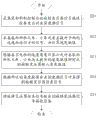
图1为本发明一种应用于装卸料机模拟机的旋转变压器信号仿真系统的结构框图;
图2为本发明一种应用于装卸料机模拟机的旋转变压器信号仿真方法的流程图;
图3为具体实施方式中速度采集模块与旋转变压器输入角度计算模块的工作流程图;
图4为具体实施方式中仿真信号生成模块的工作流程图。
具体实施方式
下面结合说明书附图与具体实施方式对本发明做进一步的详细说明。
图1示出了本发明一种应用于装卸料机模拟机的旋转变压器信号仿真系统的结构框图,该系统包括正弦激励信号采集模块11、仿真信号生成模块12、仿真信号输出模块13、速度采集模块14和旋转变压器输入角度计算模块15。正弦激励信号采集模块11与仿真信号生成模块12连接、仿真信号生成模块12与仿真信号输出模块13连接,速度采集模块14与旋转变压器输入角度计算模块15连接,旋转变压器输入角度计算模块15与仿真信号生成模块12连接。其中:
正弦激励信号采集模块11用于采集装卸料机控制台的旋转变压器信号接收设备发出的正弦激励信号,并将信号发送到仿真信号生成模块。本实施方式中,旋转变压器(RESOLVER)仿真信号接收设备属于装卸料机控制台,为装卸料机控制台的驱动电机,旋转变压器(RESOLVER)仿真信号接收设备负责发送正弦激励信号到装卸料机模拟机,同时接收由装卸料机模拟机发出的旋转变压器(RESOLVER)仿真信号;
速度采集模块14用于采集装卸料机大车、小车或者主提升手柄发出的速度信号和运行方向信号,并根据采集到的速度信号计算得到装卸料机大车、小车或者主提升的速度数值。装卸料机手柄属于装卸料机控制台,装卸料机操作员在进行操作培训时,操作装卸料机手柄,发出装卸料机大车、小车或者主提升速度和运行方向信号,这些信号被速度采集模块14采集并送至装卸料机模拟机,装卸料机模拟机软件程序经过逻辑处理和数值计算,得出此时装卸料机大车、小车或者主提升手柄行程位置所对应的速度数值和方向,运行方向信号最后用于判断旋转变压器(RESOLVER)仿真信号输出正转信号还是反转信号。
旋转变压器输入角度计算模块15用于根据真实电机的速度角度计算公式计算装卸料机大车、小车或主提升的速度数值所对应的装卸料机大车旋转变压器、小车旋转变压器或主提升旋转变压器的输入角度数值,根据所述的运行方向信号确定输入角度数值的正负。其中,速度角度计算公式是根据真实的电机额定转速所对应的装卸料机额定速度计算出来的。
仿真信号生成模块12用于根据旋转变压器的输入角度数值和正弦激励信号计算得到旋转变压器仿真信号。该模块包括:
角弧度转换单元:用于将所述的角度数值转换为弧度数值;仿真信号生成模块13的该单元首先将旋转变压器(RESOLVER)输入角度计算模块得到的输入角度数值作为后续的一个数值增量,然后将此输入角度数值增量转换为弧度数值增量;
输入数值计算模块:用于将弧度数值根据预设的数学公式计算得到旋转变压器信号传递函数所需的输入数值;
正余弦数值计算单元:用于根据旋转变压器信号传递函数计算得到输入数值所对应的正弦数值和余弦数值;该单元依据旋转变压器(RESOLVER)信号的传递函数,每次程序循环时都分别计算输入数值计算模块得到的输入数值所对应的正弦数值和余弦数值;
信号转换单元:用于将所述的正弦激励信号转换为符合旋转变压器信号传递函数的正弦激励信号;该模块将正弦激励信号采集模块11得到的正弦激励信号经过逻辑和数值运算,得到符合旋转变压器(RESOLVER)信号传递函数的正弦激励信号;
仿真信号计算单元:用于根据正弦数值和余弦数值、以及符合旋转变压器信号传递函数的正弦激励信号计算得到旋转变压器仿真信号。旋转变压器仿真信号包括旋转变压器(RESOLVER)正弦波仿真信号和余弦波仿真信号两个波形信号。
仿真信号输出模块13用于将旋转变压器仿真信号输出到旋转变压器信号接收设备。仿真信号输出模块13将仿真信号生成模块12计算得到的旋转变压器(RESOLVER)正弦波仿真信号和余弦波仿真信号通过模拟量输出端口直接输出;根据旋转变压器输入角度计算模块15确定的输入角度数值的正或负可以控制仿真信号输出模块输出的旋转变压器(RESOLVER)仿真信号为电机正转或者电机反转信号,正输入角度数值对应电机正转信号,负输入角度数值对应电机反转信号。
本发明的仿真系统可实现利用软件方法仿真真实的装卸料机编码器信号,可根据实际需要对装卸料机模拟机的旋转变压器仿真信号实现灵活控制,仿真模拟不同工况,不再依赖真实的电机硬件设备,从而提高核电站装卸料机操作员的培训效率。旋转变压器(RESOLVER)仿真信号接收设备和装卸料机手柄属于装卸料机控制台,其中旋转变压器(RESOLVER)仿真信号接收设备负责发送正弦激励信号到装卸料机模拟机,同时接收由装卸料机模拟机发出的旋转变压器(RESOLVER)仿真信号;装卸料机操作员在进行操作培训时,操作装卸料机手柄,发出装卸料机大车、小车或者主提升速度和运行方向信号,这些信号被采集并送至装卸料机模拟机,装卸料机模拟机程序根据这些信号进行逻辑和数值运算,得出此时旋转变压器(RESOLVER)所对应的输入弧度数值,然后再利用此数值进行旋转变压器(RESOLVER)信号的仿真模拟。
在实际应用过程中,装卸料机模拟机控制平台可以采用基于FPGA技术的控制平台和该平台相应的输入模块和输出模块,比如控制平台采用NICompactRIO平台、编程软件采用NI LabVIEW软件、正弦激励信号采集模块采用NI9223模拟量输入模块、速度采集模块采用NI9222模拟量输入模块、仿真信号输出模块采用NI9269模拟量输出模块。
图2示出了基于图1中仿真系统的一种应用于装卸料机模拟机的旋转变压器信号仿真方法的流程图,该方法包括以下步骤:
步骤S21:采集装卸料机控制台的旋转变压器信号接收设备发出的正弦激励信号;
依据旋转变压器(RESOLVER)信号的调制机制,仿真旋转变压器信号时首先需要获取正弦激励信号。本发明通过软件方法中的正弦激励信号采集模块11采集由装卸料机控制台的电机驱动器(旋转变压器信号接收设备)发出正弦激励信号,此信号送至仿真信号生成模块用于旋转变压器(RESOLVER)信号的仿真模拟。旋转变压器(RESOLVER)是电机自带的反馈部件,模拟机系统需要模拟它的输出信号。
步骤S22:采集装卸料机大车、小车或者主提升手柄的速度和运行方向信号,并计算速度数值;
步骤S23:根据真实电机的速度角度计算公式计算装卸料机大车、小车或主提升的速度数值所对应的旋转变压器的输入角度数值;
速度采集模块14采集由装卸料机控制台的大车、小车或者主提升手柄发出的速度和运行方向信号,装卸料机模拟机软件程序经过逻辑处理和数值计算,得出此时装卸料机大车、小车或者主提升手柄行程位置所对应的速度数值和方向,并将计算出的速度数值及运行方向发送到旋转变压器输入角度计算模块。方向信号最后用于判断旋转变压器(RESOLVER)仿真信号输出正转信号还是反转信号。其中,由装卸料机模拟机软件程序经过逻辑处理和数值计算速度数值为现有技术。速度采集模块14与旋转变压器输入角度计算模块15的工作流程如图3所示:旋转变压器(RESOLVER)输入角度计算模块根据装卸料机大车、小车和主提升速度数值,利用真实的电机额定转速所对应的装卸料机额定速度推导出来的速度角度计算公式进行数值运算,得出装卸料机大车、小车或者主提升的速度数值所对应的旋转变压器(RESOLVER)输入角度数值,再根据速度采集模块14采集到的装卸料机控制台上的手柄运行方向信号,将输入角度数值设定为正或者负输入角度数值。利用真实的电机额定转速所对应的装卸料机额定速度推导速度角度计算公式,以及根据该速度角度计算公式进行数值计算得出速度数值所对应的旋转变压器输入角度数值均为现有技术。
步骤S24:根据角度数值和正弦激励信号计算得到旋转变压器仿真信号;
步骤S25:将旋转变压器仿真信号输出到旋转变压器信号接收设备。
根据所述的输入角度数值和正弦激励信号计算得到旋转变压器仿真信号的具体方式如图4所示,包括以下步骤:
a.将输入角度数值转换为弧度数值;
b.将弧度数值利用预设的数学公式进行计算,得到旋转变压器信号传递函数所需的输入数值;
c.根据旋转变压器信号传递函数计算输入数值所对应的正弦数值和余弦数值;
d.将所述的正弦激励信号经过逻辑和数值运算得到符合旋转变压器信号传递函数的正弦激励信号;
e.根据所述的正弦数值和余弦数值、以及符合旋转变压器信号传递函数的正弦激励信号计算得到旋转变压器仿真信号。
仿真信号生成模块12首先将旋转变压器(RESOLVER)输入角度计算模块15得到的输入角度数值作为后续的一个数值增量,然后将此输入角度数值增量转换为弧度数值增量,再将弧度数值变量利用程序预设的数学公式进行计算,得出旋转变压器(RESOLVER)信号传递函数所需的输入数值;之后依据旋转变压器(RESOLVER)信号的传递函数,每次程序循环时都分别计算出输入数值所对应的正弦数值和余弦数值;仿真信号生成模块将步骤S21中得到的正弦激励信号经过逻辑和数值运算,得到符合旋转变压器(RESOLVER)信号传递函数的正弦激励信号;最后依据旋转变压器(RESOLVER)信号传递函数,将计算得到的正弦数值和余弦数值分别与得到的符合旋转变压器(RESOLVER)信号传递函数的正弦激励信号进行相乘计算,得出最终的旋转变压器(RESOLVER)仿真信号,并将仿真信号发送到反信号输出模块13,此仿真信号包括旋转变压器(RESOLVER)正弦波仿真信号和余弦波仿真信号两个波形信号。这两个信号构成一个完整的仿真信号,才能被信号接收设备正确识别转换为数字信号。其中,旋转变压器(RESOLVER)信号传递函数、利用程序预设的数学公式计算旋转变压器(RESOLVER)信号传递函数所需的输入数值、以及依据旋转变压器信号传递函数,计算出输入数值所对应的正弦数值和余弦数值均为现有技术。本实施方式中采用FPGA来完成所采集到的正弦激励信号到符合旋转变压器信号传递函数的正弦激励信号的转换,因此需将正弦激励信号需要转换为满足FPGA硬件编程要求的数据类型。仿真信号输出模块13将仿真信号生成模块计算得到的旋转变压器(RESOLVER)正弦波仿真信号和余弦波仿真信号按照设定的循环时间周期通过模拟量输出端口直接输出,根据步骤S23正或负输入角度数值可以控制仿真信号输出模块输出的旋转变压器(RESOLVER)仿真信号为电机正转或者电机反转信号,正输入角度数值对应电机正转信号,负输入角度数值对应电机反转信号。至此,整个的旋转变压器(RESOLVER)信号仿真模拟过程结束。
显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其同等技术的范围之内,则本发明也意图包含这些改动和变型在内。
Claims (9)
1.一种应用于装卸料机模拟机的旋转变压器信号仿真系统,包括正弦激励信号采集模块(11)、与正弦激励信号采集模块(11)连接的仿真信号生成模块(12)、以及与仿真信号生成模块(12)连接的仿真信号输出模块(13),该系统还包括速度采集模块(14)、以及与速度采集模块(14)连接的旋转变压器输入角度计算模块(15),旋转变压器输入角度计算模块(15)与仿真信号生成模块(12)连接,其特征在于:
正弦激励信号采集模块(11)用于采集装卸料机控制台的旋转变压器信号接收设备发出的正弦激励信号,并将信号发送到仿真信号生成模块(12);
速度采集模块(14)用于采集装卸料机大车、小车或者主提升手柄发出的速度信号和运行方向信号,并根据采集到的速度信号计算得到装卸料机大车、小车或者主提升当前的速度数值;
旋转变压器输入角度计算模块(15)用于根据真实电机的速度角度计算公式计算装卸料机大车、小车或主提升的速度数值所对应的装卸料机大车旋转变压器、小车旋转变压器或主提升旋转变压器的输入角度数值,根据所述的运行方向信号确定输入角度数值的正负;
仿真信号生成模块(12)用于根据采集到的正弦激励信号和旋转变压器的输入角度数值计算得到旋转变压器仿真信号;
仿真信号输出模块(13)用于将旋转变压器仿真信号输出到装卸料机控制台的旋转变压器信号接收设备。
2.如权利要求1所述的一种应用于装卸料机模拟机的旋转变压器信号仿真系统,其特征在于:所述的旋转变压器信号接收设备为装卸料机控制台的电机驱动器。
3.如权利要求1所述的一种应用于装卸料机模拟机的旋转变压器信号仿真系统,其特征在于:所述的速度角度计算公式是根据真实的电机额定转速所对应的装卸料机额定速度计算出来的。
4.如权利要求1至3之一所述的一种应用于装卸料机模拟机的旋转变压器信号仿真系统,其特征在于,所述的仿真信号生成模块(12)包括:
角弧度转换单元:用于将所述的输入角度数值转换为弧度数值;
输入数值计算模块:用于将所述弧度数值根据预设的数学公式计算得到旋转变压器信号传递函数所需的输入数值;
正余弦数值计算单元:用于根据旋转变压器信号传递函数计算得到输入数值所对应的正弦数值和余弦数值;
信号转换单元:用于将所述的正弦激励信号转换为符合旋转变压器信号传递函数的正弦激励信号;
仿真信号计算单元:用于根据正弦数值和余弦数值、以及符合旋转变压器信号传递函数的正弦激励信号计算得到旋转变压器仿真信号。
5.如权利要求4所述的一种应用于装卸料机模拟机的旋转变压器信号仿真系统,其特征在于:所述的旋转变压器仿真信号包括正弦波仿真信号和余弦波仿真信号。
6.如权利要求5所述的一种应用于装卸料机模拟机的旋转变压器信号仿真系统,其特征在于:仿真信号输出模块(13)根据所述的角度数值的方向正向或反向输出旋转变压器仿真信号。
7.一种应用于装卸料机模拟机的旋转变压器信号仿真方法,包括以下步骤:
(一)采集装卸料机控制台的旋转变压器信号接收设备发出的正弦激励信号;
(二)采集装卸料机大车、小车或者主提升手柄发出的速度信号和运行方向信号,并根据采集到的速度信号计算得到装卸料机大车、小车或者主提升手柄当前行程位置所对应的速度数值;
(三)根据真实电机的速度角度计算公式计算装卸料机大车、小车或主提升的速度数值所对应的装卸料机大车旋转变压器、小车旋转变压器或主提升旋转变压器的输入角度数值,根据所述的运行方向信号确定输入角度数值的方向;
(四)根据所述的输入角度数值和正弦激励信号依据旋转变压器的传递函数计算得到旋转变压器仿真信号;
(五)根据设定的循环时间周期将旋转变压器仿真信号输出到旋转变压器信号接收设备。
8.如权利要求7所述的一种应用于装卸料机模拟机的旋转变压器信号仿真方法,其特征在于:步骤(四)中,根据所述的输入角度数值和正弦激励信号计算得到旋转变压器仿真信号的具体方式为:
a.将输入角度数值转换为弧度数值;
b.将弧度数值利用预设的数学公式进行计算,得到旋转变压器信号传递函数所需的输入数值;
c.根据旋转变压器信号传递函数计算输入数值所对应的正弦数值和余弦数值;
d.将所述的正弦激励信号计算得到符合旋转变压器信号传递函数的正弦激励信号;
e.根据所述的正弦数值和余弦数值、以及符合旋转变压器信号传递函数的正弦激励信号计算得到旋转变压器仿真信号。
9.如权利要求8所述的一种应用于装卸料机模拟机的旋转变压器信号仿真方法,其特征在于:步骤e中,将所述的正弦数值和余弦数值分别与符合旋转变压器信号传递函数的正弦激励信号相乘得到旋转变压器仿真信号。
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201310068798.9A CN103207570B (zh) | 2013-03-05 | 2013-03-05 | 应用于装卸料机模拟机的旋转变压器信号仿真系统和方法 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201310068798.9A CN103207570B (zh) | 2013-03-05 | 2013-03-05 | 应用于装卸料机模拟机的旋转变压器信号仿真系统和方法 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN103207570A true CN103207570A (zh) | 2013-07-17 |
| CN103207570B CN103207570B (zh) | 2015-07-08 |
Family
ID=48754830
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201310068798.9A Active CN103207570B (zh) | 2013-03-05 | 2013-03-05 | 应用于装卸料机模拟机的旋转变压器信号仿真系统和方法 |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN103207570B (zh) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN105866687A (zh) * | 2016-06-20 | 2016-08-17 | 株洲田龙铁道电气股份有限公司 | 一种旋转变压器的模拟装置及电机驱动器的测量系统 |
| CN109521755A (zh) * | 2019-01-21 | 2019-03-26 | 苏州华兴源创科技股份有限公司 | 一种仿真系统、旋变测试系统和旋变测试方法 |
| CN109542030A (zh) * | 2018-10-15 | 2019-03-29 | 中国核电工程有限公司 | 一种基于fpga的核电站装卸料机状态监控系统及其监控方法 |
| CN112017499A (zh) * | 2020-07-17 | 2020-12-01 | 中国核电工程有限公司 | 一种基于仿真技术的半实物装卸料机模拟机系统 |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004210247A (ja) * | 2002-01-30 | 2004-07-29 | Siemens Ag | トリガ及びリゾルバ信号の評価に使用される単一制御システムに回転の配向から導出された信号を供給することによりモータの回転の配向を評価する方法及び装置並びに該装置が設けられている自動車 |
| EP2077476A1 (en) * | 2007-12-27 | 2009-07-08 | Institutul de Mecanica Solidelor al Academiei Romane | Real-time control method and control device for an actuator |
| CN101598944A (zh) * | 2009-06-17 | 2009-12-09 | 上海微电子装备有限公司 | 硬件在环仿真装置和硬件在环仿真方法 |
| CN102347720A (zh) * | 2010-08-06 | 2012-02-08 | 上海开通数控有限公司 | 伺服控制器模拟量速度指令自动调零的方法 |
| CN102435133A (zh) * | 2011-09-02 | 2012-05-02 | 北京邮电大学 | 一种基于fpga的旋转变压器测角系统 |
-
2013
- 2013-03-05 CN CN201310068798.9A patent/CN103207570B/zh active Active
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004210247A (ja) * | 2002-01-30 | 2004-07-29 | Siemens Ag | トリガ及びリゾルバ信号の評価に使用される単一制御システムに回転の配向から導出された信号を供給することによりモータの回転の配向を評価する方法及び装置並びに該装置が設けられている自動車 |
| EP2077476A1 (en) * | 2007-12-27 | 2009-07-08 | Institutul de Mecanica Solidelor al Academiei Romane | Real-time control method and control device for an actuator |
| CN101598944A (zh) * | 2009-06-17 | 2009-12-09 | 上海微电子装备有限公司 | 硬件在环仿真装置和硬件在环仿真方法 |
| CN102347720A (zh) * | 2010-08-06 | 2012-02-08 | 上海开通数控有限公司 | 伺服控制器模拟量速度指令自动调零的方法 |
| CN102435133A (zh) * | 2011-09-02 | 2012-05-02 | 北京邮电大学 | 一种基于fpga的旋转变压器测角系统 |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN105866687A (zh) * | 2016-06-20 | 2016-08-17 | 株洲田龙铁道电气股份有限公司 | 一种旋转变压器的模拟装置及电机驱动器的测量系统 |
| CN105866687B (zh) * | 2016-06-20 | 2019-01-15 | 株洲田龙铁道电气股份有限公司 | 一种旋转变压器的模拟装置及电机驱动器的测量系统 |
| CN109542030A (zh) * | 2018-10-15 | 2019-03-29 | 中国核电工程有限公司 | 一种基于fpga的核电站装卸料机状态监控系统及其监控方法 |
| CN109542030B (zh) * | 2018-10-15 | 2021-09-17 | 中国核电工程有限公司 | 一种基于fpga的核电站装卸料机状态监控系统及其监控方法 |
| CN109521755A (zh) * | 2019-01-21 | 2019-03-26 | 苏州华兴源创科技股份有限公司 | 一种仿真系统、旋变测试系统和旋变测试方法 |
| CN112017499A (zh) * | 2020-07-17 | 2020-12-01 | 中国核电工程有限公司 | 一种基于仿真技术的半实物装卸料机模拟机系统 |
| CN112017499B (zh) * | 2020-07-17 | 2023-05-16 | 中国核电工程有限公司 | 一种基于仿真技术的半实物装卸料机模拟机系统 |
Also Published As
| Publication number | Publication date |
|---|---|
| CN103207570B (zh) | 2015-07-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN103580050B (zh) | 一种大功率模块化多电平锂电池储能变流器装置 | |
| CN103207571B (zh) | 一种应用于装卸料机模拟机的编码器信号仿真系统和方法 | |
| CN103207570B (zh) | 应用于装卸料机模拟机的旋转变压器信号仿真系统和方法 | |
| CN104660098A (zh) | 基于低频pwm和单神经元自适应的超声波电机控制系统 | |
| CN104407519B (zh) | 一种交直交冶金轧机传动系统半实物仿真系统 | |
| CN107957720A (zh) | 基于dSPACE和电机试验台的车用混合储能控制系统 | |
| CN203008019U (zh) | 挖掘机油门马达自学习控制装置 | |
| CN102801180B (zh) | 一种微电网并网等效模型的参数辨识方法 | |
| CN111666712B (zh) | 一种大型复杂机电装备的“测-算-控”智能化数字孪生方法 | |
| CN102215026B (zh) | 基于dsp与fpga的高压变频器中性点偏移技术的控制装置 | |
| CN203191815U (zh) | 一种用于堆取料机的全自动化控制设备 | |
| CN104141784A (zh) | 一种装载机发动机与可调液力变矩器动态匹配装置及方法 | |
| CN105262458B (zh) | 基于fpga的多电平spwm脉冲产生系统及方法 | |
| CN203332119U (zh) | 一种轨道车走行控制装置 | |
| CN207216352U (zh) | 一种基于设备联网系统的模温机控制器 | |
| CN1323512C (zh) | 塔吊群交叉作业的安全防护智能测控仪器 | |
| CN201860099U (zh) | 一种小电流接地选线装置 | |
| CN201774494U (zh) | 基于dsp与fpga的高压变频器中性点偏移技术的控制装置 | |
| CN104237697A (zh) | 一种新能源汽车充电设备测试系统 | |
| CN203224773U (zh) | 焦化厂配煤用皮带轮小车自动定位控制系统 | |
| Steinhagen et al. | Evaluation of the usage of edge computing and lora for the control of electric vehicle charging in the low voltage grid | |
| CN207612188U (zh) | 一种智能变频器 | |
| CN103178619B (zh) | 一种实现3g监控的apf、svg控制装置 | |
| CN202669696U (zh) | 工程机械gprs控制系统 | |
| CN201084867Y (zh) | 一种电力有源滤波器无线远程控制系统 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant |