发明内容
本发明所要解决的技术问题在于提供一种在干沙沙滩和湿沙沙滩上不易沉陷、行驶阻力小、作业效率高、同时能平整沙滩的沙滩清洁车。
本发明所要解决的另一技术问题在于提供一种使用上述沙滩清洁车的清洁作业方法,在干沙沙滩作业时,采用深层清理沙滩垃圾的作业模式,在湿沙沙滩作业时,采用只清理表层垃圾的作业模式。
为解决上述技术问题,本发明的技术解决方案是:
一种沙滩清洁车,包括机架,该机架的前部安装有拨沙滚轮装置、中部安装有筛分传送装置、后部安装有垃圾箱及垃圾箱举升翻转机构;位于该拨沙滚轮装置后面、在机架的前下部固定有一推铲,该推铲上固定有导沙板,该导沙板与所述筛分传送装置相接;该机架的后下部安装在一具有轮子的承载桥上,该承载桥上安装有用于平整沙滩的刮平机构;该机架的前端安装有牵引装置,该牵引装置与拖拉机上的可以控制所述推铲的吃沙深度的悬挂机构铰接,从而由拖拉机牵引作业或行驶。
所述拖拉机悬挂机构包括提升油缸、提升臂、提升杆以及下拉杆,所述牵引装置与该下拉杆铰接;所述的提升臂上安装有感应柱,在拖拉机的机体上安装有与该感应柱位置相应的高、低位两个位置传感器。
所述位置传感器一般使用的磁电式传感器,也可使用光电式传感器。
所述拖拉机悬挂机构具有浮动控制功能,在清洁作业过程中,提升油缸处于浮动状态,使清洁车的推铲沿地面仿形作业。当沙滩中有障碍物如大石头块时,牵引阻力会突然增加,这时推铲自动提升避让,绕过障碍物后,牵引阻力减小,推铲又可自动恢复原来作业深度,该技术是拖拉机公知成熟技术,不是本案重点。
所述拨沙滚轮装置包括滚轮及安装有滚轮上的弹性齿,该滚轮固定在一摆动支架的一端,该摆动支架的另一端铰接在所述机架上,该摆动支架与机架之间还铰接有滚轮油缸;该滚轮油缸为缸筒内设置有非接触式磁致伸缩直线位移传感器的油压缸。
所述的滚轮油缸包括缸筒及密封安装于缸筒内的活塞,该活塞为中空结构,其中空腔内固定有一磁环,该活塞连接一中空活塞杆;所述缸筒的底部筒内固定地安装有一直线位移传感器,该直线位移传感器连接有一传感器杆,该传感器杆无接触地伸入活塞和活塞杆的中空腔内;且该直线位移传感器通过信号线与一信号连接器连接,该信号连接器与沙滩清洁车的控制系统相连接;所述活塞杆的杆端铰接在所述摆动支架上的滚轮一端,所述缸筒的底部外侧设有一耳环,该耳环铰接在所述机架之上。
所述的刮平机构由刮平油缸、连杆、刮平板座及刮平板组成,该刮平油缸、连杆和承载桥的桥架相互铰接而组成一个摇块机构,该刮平板安装于刮平板座上。
所述的举升翻转机构包括举升臂、翻转座、连杆、举升油缸、翻转油缸及所述的垃圾箱;所述举升臂、翻转座、连杆及机架相互铰接组成一个平面四连杆机构;所述举升油缸的缸筒一端铰接在机架上,活塞杆一端铰接在所述举升臂上,驱动该四连杆机构产生举升或下降动作;所述翻转座、垃圾箱及翻转油缸相互铰接组成一个摇块机构,该翻转油缸驱动该摇块机构使垃圾箱产生翻转动作。
所述机架上固定一可控制所述翻转油缸动作的行程开关,在所述举升臂上固定一可与该行程开关碰触的碰杆。
所述举升翻转机构还包括液压控制系统,该液压控制系统包括通过管道相连的油箱、油泵、换向阀、行程阀及顺序阀;所述换向阀连接在油泵与所述举升油缸和翻转油缸之间;所述行程阀设置在所述翻转油缸的大腔与换向阀和举升油缸之间的管道之间,所述行程开关与该行程阀相连;所述顺序阀设置在所述举升油缸的小腔与换向阀和翻转油缸的小腔之间的管道之间;所述的换向阀由控制杆控制档位。
本发明进一步提供一种沙滩清洁车清洁作业方法,沙滩清洁车作业时,推铲的吃沙深度由拖拉机的悬挂机构和安装于拖拉机机体上的高、低位位置传感器来控制;拨沙滚轮的吃沙深度由具有内置直线位移传感器的滚轮油缸来控制,当沙滩不平或沙滩内有大石头块等障碍物时,由具有浮动控制功能的拖拉机悬挂系统来控制避开障碍物或仿地形作业,垃圾箱装满垃圾后,由举升翻转机构完成卸料。
本发明所提供的作业方法所包括的步骤为:
S1,检测沙滩清洁车作业的沙滩状态;
S2,判断所需清洁作业沙滩的状态,如果是湿沙沙滩,转向步骤S3,如果是干沙沙滩,转向步骤S4;
S3,沙滩清洁车在硬实的湿沙沙滩上作业模式;
S4,沙滩清洁车在松软的干沙沙滩上作业模式;
S5,检查并判断垃圾箱是否装满垃圾,如果是,则转向步骤S6,如果不是,则转向步骤S1;
S6,垃圾箱举升、翻转、卸料。
本发明提供的湿沙沙滩的作业模式所包括的步骤为:
S31,拖拉机悬挂机构的提升油缸活塞杆缩回,推铲下降,当推铲与沙面平齐或略低于沙面时,位于提升臂上的感应柱与高位位置传感器感应头对齐,高位位置传感器获取位置信号;
S32,控制器根据位置传感器输入的信号,控制提升油缸停止其动作,同时开启各马达旋转,分别与各马达相连的拨沙滚轮和筛分传送装置工作;
S33,控制器同时控制拨沙装置的滚轮油缸伸出或缩回,当滚轮油缸内置直线位移传感器感应到设定的高位模式位移时,输送信号到控制器;
S34,控制器停止滚轮油缸动作,放下刮平板;
S35,沙滩清洁车前行进行湿沙沙滩作业;
本发明提供的干沙沙滩的作业模式所包括的步骤为:
S41,拖拉机悬挂机构的提升油缸活塞杆缩回,推铲下降,当推铲低于沙面约100mm时,位于提升臂上的感应柱与低位位置传感器感应头对齐,低位位置传感器获取位置信号;
S42,控制器根据位置传感器输入的信号,控制提升油缸停止其动作,同时开启各马达旋转,分别与各马达相连的拨沙滚轮和筛分传送装置工作;
S43,控制器控制拨沙装置的滚轮油缸伸出或缩回,当滚轮油缸内置直线位移传感器感应到设定的低位模式位移时,输送信号到控制器;
S44,控制器停止滚轮油缸动作,放下刮平板;
S45,沙滩清洁车前行进行干沙沙滩作业。
采用上述方案后,本发明具有下述优点:
1.本实用新型结构简单,因此整机的重量较轻便,作业时轮胎不易沉陷入沙滩内,在松软的沙滩上有良好的通过性。
2.在清洁车的后方设置有刮平机构,当沙滩清洁车作业时,可由刮平板将散落的沙子刮平,使沙面变得平整、美观。
3.本发明具有浮动控制功能的拖拉机悬挂机构使清洁车推铲自动避让障碍物,同时用于收集垃圾的拨沙滚轮装置采用弹性齿也可以起到自动避障的作用,该弹性齿可以将深埋在沙滩内的垃圾耙梳清理出来。
4.本发明采用的垃圾箱举升翻转机构对垃圾箱的举升和翻转是通过两个机构分别来实现的,这样在实际操作时,可以通过控制系统实现先举升,再令垃圾箱翻转以倾卸垃圾。这种分别控制举升和翻转的方式,不但可以避免在倾卸过程中垃圾撒漏,而且独立控制的翻转机构可以使翻转角度足够大,从而使卸料更彻底、干净。
5.本发明所述的举升翻转机构可以通过专门设计的液压控制系统进行自动控制,并实现举升与翻转按规定的顺序动作,最终实现垃圾箱举升-垃圾箱翻转-将垃圾倾翻卸料-垃圾箱收回-垃圾箱下降的顺序循环工作,从而提高工作效率。
6. 清洁作业时,推铲的吃沙深度由拖拉机的悬挂机构和安装于拖拉机机体上的高、低位位置传感器来控制;拨沙滚轮的吃沙深度由具有内置直线位移传感器的滚轮油缸来控制,因此沙滩清洁车可以有表层清理及深层清理两种工作模式,这样只需按下不同工作模式的控制按钮,即可自动且精确地控制拖拉机提升油缸、滚轮油缸活塞杆的位移量,从而分别精确控制推铲和拨沙滚轮的吃沙深度,不但可达到理想的清理效果,还可以减少操作人员的劳动强度,提高作业效率。
具体实施方式
下面结合附图和具体实施例对本发明作进一步详述。
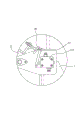
本发明揭示一种沙滩清洁车,如图1所示,为本发明的较佳实施例。所述的沙滩清洁车包括机架1,该机架1的前部安装有用于拾取垃圾的拨沙滚轮装置2、中部安装有用于筛分及输送垃圾的筛分传送装置3、后部安装有用于收集垃圾的垃圾箱55及垃圾箱举升翻转机构5;位于所述拨沙滚轮装置2后面、在机架1的前下部固定有一推铲11,该推铲11上固定有导沙板16,该导沙板16与所述筛分传送装置3相接;所述机架1的后下部安装在一具有轮子81的承载桥8上,该轮子81为具有宽基低压轮胎的轮子,该承载桥8上安装有用于平整沙滩的刮平机构6;该机架1的前端安装有牵引装置17,该牵引装置17与拖拉机4上的可以控制所述推铲11的吃沙深度的悬挂机构铰接,从而由拖拉机4牵引作业或行驶。其中:
如图2所示,所述拖拉机4的悬挂机构的具体结构可以为:其包括提升油缸41、提升臂42、提升杆43以及下拉杆44,该提升臂42上安装有感应柱47,在拖拉机4的机体上安装有与该感应柱47位置相应的高位位置传感器46及低位位置传感器45,两个位置传感器的安装位置分别由推铲11在表层作业及深层作业时的吃沙深度时决定感应柱47的位置来确定,所述位置传感器45、46的感应头表面与感应柱47的表面平行且相距5-10mm。
所述位置位传感器45、46一般采用磁电式传感器,也可使用光电式传感器。
所述由提升油缸41、提升臂42、提升杆43、下拉杆44组成的拖拉机悬挂机构具有浮动控制功能,在清洁作业过程中,提升油缸41处于浮动状态,使清洁车的推铲11可沿地面仿形作业。当沙滩中有障碍物如大石头块时,牵引阻力会突然增加,这时推铲11自动提升避让,绕过障碍物后,牵引阻力减小,推铲11又可自动恢复原来的作业深度,该技术是拖拉机公知成熟技术,不是本案重点。
如图3至图5所示,所述拨沙滚轮装置2的具体结构可以为:其包括滚轮21,在该滚轮21上安装有若干可随滚轮一起旋转的弹性齿22,该滚轮21固定在一摆动支架23的一端,该摆动支架23的另一端铰接在所述机架1上,该摆动支架23与机架1之间还铰接有滚轮油缸9。所述的弹性齿22可以将深埋在沙滩内的垃圾74耙梳清理出来,当沙滩内部有体积很大的石头时,弹性齿22可以起到自动避障的作用,同时拨沙滚轮21的旋向与沙滩清洁车的行走方向一致,减小了清洁车的作业阻力,减小了拖拉机4消耗的牵引功率。
所述的滚轮油缸9可以为设置有非接触式磁致伸缩直线位移传感器的油压缸,所述的非接触式磁致伸缩传感器是已经公知和成熟技术的传感器,其可以精确感知活塞杆的伸缩量,因此不需人工观察、人工调整,就可以通过控制器来控制与滚轮油缸9相连的滚轮21的工作位置。
配合图5所示,所述的滚轮油缸9的具体结构可以为:其主要包括缸筒94及密封安装于缸筒94内的活塞95,该活塞95为中空结构,其中空腔内固定有一磁环98,该活塞95连接一中空活塞杆93;所述缸筒94的底部筒内固定地安装有所述的直线位移传感器912,该直线位移传感器912连接有一传感器杆910,该传感器杆910无接触地伸入活塞95和活塞杆93的中空腔内;且该直线位移传感器912通过信号线916与一信号连接器915连接,该信号连接器915与沙滩清洁车的控制系统相连接;所述活塞杆93的杆端铰接在所述摆动支架23上的滚轮21一端,所述缸筒94的底部外侧设有一耳环917,该耳环917铰接在所述机架1之上。由于本实施将所述的非接触式磁致伸缩直线位移传感器912内置在滚轮油缸9的缸筒94内部,这样缸筒94底部外侧就可以用来设置耳环917,从而使油缸可以实现耳环式连接,使油缸可以任何方向摆动,进而令滚轮21活动更灵活。
所述滚轮油缸9的工作原理为:当操纵控制开关使活塞95和活塞杆93在油液的作用下沿缸筒94滑动时,所述传感器杆910的电流脉冲产生的磁场与磁环98的磁场相交的瞬间产生“磁致伸缩”现象,从而使直线位移传感器912感应到所述活塞95位移的变化,通过信号连接器915输出信号到沙滩清洁车的控制系统,当控制系统判断位移量达到设定位移量时,即控制活塞杆93停止动作,否则将继续动作。这样无需人工观察、人工调整,即可调整拨沙滚轮装置2的伸缩量,从而减少操作人员的劳动强度。
如图6至图8所示,所述筛分传送装置3包括输送网带32,该输送网带32为一封闭循环带绕设在主动辊31和从动辊35之间。所述输送网带32位于主动辊31及从动辊35上方一侧的上行部分321的下面设置有至少一个振动辊34,使输送网带32产生振动,使夹杂在垃圾中的沙子73分离。所述输送网带32位于主动辊31及从动辊35下方一侧的下行部分322的作用是使输送网带首尾相接,形成一个封闭的循环带。所述的主动辊31由网带马达(图中未示出)驱动,该网带马达又通过传动装置驱动所述的振动辊34转动,该传动装置可以为皮带传动装置30。
进一步的,所述的振动辊34可以包括支撑轴39及固定在该支撑轴39上的若干个振动板38。各振动板38可以由安装座37来固定其位置,该振动板38和安装座37的中心均可设置方形安装孔381,而所述支撑轴39也可以设置成方形,从而可套进并锁定在的支撑轴39上。
所述的振动板38可以为鼓形三角板,其上具有若干啮合齿382,当所述振动辊34旋转时同时带动各个振动板38转动,三角形的振动板结构可以带动输送网带32上下运动,使输送网带32产生振动,令输送网带32上夹杂在垃圾中的沙子因振动而掉落到地面,从而使沙子分离。所述振动板38上的各啮合齿382的齿宽与输送网带的网孔相匹配,从而使各个齿形部分与输送网带的网孔啮合,这样,振动辊34在转动过程中,不仅使输送网带上行部分321产生振动,还可通过振动板38与输送网带32的啮合,产生一个与输送网带32运动方向相同的驱动力,从而减小了主动辊31的驱动负荷,也减小了主动辊的磨损。
更进一步的,在靠近所述主动辊31和从动辊35处可各设置一托带辊,即上托带辊33及下托带辊36,且两个托带辊均支撑于输送网带的下行部分322下方。上托带辊33的作用是增大输送网带32在主动辊31上的包角,从而产生较大的传递扭矩;下托带辊36的作用是改变输送网带32的运行轨迹,使其顺利的绕行于从动辊35之上。两托带辊33及36之间的输送网带32可以形成一段松驰的部分,其作用是利用这段网带的自身重力,使输送网带32产生合适的张紧力,从而使输送网带上行部分321适度张紧。
所述的举升翻转机构5用于举升及翻转垃圾箱55,从而将垃圾箱55内的垃圾倾倒转运车的车箱内。该举升翻转机构可以有多种结构,最典型的就是通过一个油缸驱动一个四连杆机构。但是,这种一个四连杆机构的装置,举升及翻转同时动作,因此在举升过程中,垃圾箱的同时翻转不可避免地会出现垃圾撒漏的现象,而且该构造垃圾箱的翻转角度小,垃圾不能完全卸干净。
为此,本发明可以采用如图9、图10所示的垃圾箱及举升翻转机构5,其主要包括举升臂51、翻转座52、连杆53、举升油缸54、垃圾箱55及翻转油缸56。其中:
所述举升臂51的一端铰接在机架1上,另一端与所述翻转座52相铰接。所述连杆53的一端也铰接于机架1上,另一端也与所述翻转座52相铰接。这样,该举升臂51、翻转座52、连杆53及机架1即组成了一个平面四连杆机构。所述举升油缸54的缸筒一端铰接在机架1上,活塞杆一端铰接在所述举升臂51上,这样,由举升油缸54即可驱动该四连杆机构产生举升或下降动作。
所述翻转座52铰接在垃圾箱55上,所述翻转油缸56一端与该翻转座52铰接,另一端与垃圾箱55相铰接。这样,所述的翻转座52、垃圾箱55及翻转油缸56即组成了一个摇块机构,且该翻转油缸56可驱动该摇块机构使垃圾箱55产生翻转动作。
由于所述的举升翻转机构5对垃圾箱55的举升和翻转是通过两个机构来实现的,即平面四连杆机构实现举升,而摇块机构实现翻转。这样在实际操作时,就可以先控制举升油缸54动作,使垃圾箱55先抬起,当垃圾箱55完全升起之后,再控制翻转油缸56动作,令垃圾箱55进行翻转倾卸垃圾。这种分别控制举升和翻转的方式,不但可以避免在倾卸过程中垃圾撒漏,而且独立控制的翻转机构可以使翻转角度足够大,从而使卸料更彻底、干净。
更进一步的,可以在机架1上固定一行程开关57,在所述举升臂51上固定一可与该行程开关57碰触的碰杆58。当四连杆机构被抬起到极限位置时,举升臂51上的碰杆58将碰触行程开关57,行程开关57的动作将控制翻转油缸56动作,从而驱动所述摇块机构使垃圾箱55翻转。
所述的举升翻转机构5还可以通过设置液压控制系统实现举升、翻转按规定顺序动作。如图11所示,所述的液压控制系统包括通过管道相连的油箱510、油泵511、换向阀512、行程阀513及顺序阀514。其中:
所述的换向阀512连接在油泵511与所述举升油缸54和所述翻转油缸56之间,该换向阀由控制杆512d控制其档位。
所述行程阀513设置在所述翻转油缸56的大腔56a与换向阀512和举升油缸54之间的管道之间。
所述顺序阀514设置在所述举升油缸54的小腔54b与换向阀512和翻转油缸56的小腔之间的管道之间。
所述行程开关57与所述行程阀513相连。
举升翻转机构由液压油泵511产生压力油提供动力。
所述的举升油缸54由所述的换向阀512和顺序阀514控制其动作。当该换向阀512处于换向阀左位512c时,举升油缸大腔54a进油,举升油缸活塞杆54c伸出,垃圾箱55产生举升动作。当该换向阀512处于换向阀右位512a,且所述翻转油缸活塞杆56c处于收回状态时,压力油通顺序阀514进入到举升油缸小腔54b,举升油缸活塞杆54c收回,垃圾箱55产生下降动作。
所述的翻转油缸56由所述换向阀512、行程阀513和顺序阀514控制其动作。当换向阀512处于换向阀左位512c、且碰杆58将行程阀513的行程开关57推到右边时,行程阀513的双向通道513b与管道导通,翻转油缸活塞杆56c伸出,垃圾箱55产生翻转动作。当换向阀512处于换向阀右位512a、且碰杆58将行程阀513的行程开关57压到右边时,翻转油缸小腔56b进油,翻转油缸活塞杆56c收回,垃圾箱55产生收回动作。
通过上述液压控制系统的控制,所述垃圾箱举升倾翻卸料的完整工作循环是:垃圾箱举升-垃圾箱翻转-将垃圾倾翻卸料-垃圾箱收回-垃圾箱下降。具体控制方法如下:
1)当操纵控制杆512d,使换向阀512处于换向阀中位512b时,所述举升油缸54及翻转油缸56均不产生动作;
2)当操纵控制杆512d,使换向阀512处于换向阀左位512c时,从换向阀左位512c出来的压力油通过管道进入举升油缸大腔54a,举升油缸活塞杆54c伸出,举升臂51产生举升动作;此时,由于行程阀513内的单向通道513a截断油液,因此翻转油缸56不能产生动作;
3)当换向阀512继续处于换向阀左位512c时,举升臂51持续举伸,当固定在举升臂51上的碰杆58将行程阀513的行程开关57推到右边时,液压油通过行程阀513内的双向通道513b进入到翻转油缸大腔56a,翻转油缸活塞杆56c伸出,垃圾箱55产生翻转动作,开始倾卸垃圾;
4)当垃圾倾卸完毕,操纵控制杆512d,使换向阀512处于换向阀右位512a,液压油通过管道进入到翻转油缸小腔56b,翻转油缸活塞杆56c收回,垃圾箱产生收回动作;
5)当换向阀512继续处于换向阀右位512a,且当垃圾箱55收回到初始位置时,翻转油缸56动作停止,此时,翻转油缸小腔56b与换向阀512之间的管道内的压力升高,当压力升高到顺序阀514的设定值时,压力油打开顺序阀514的压力阀514b,压力油通过管道进入到举升油缸小腔54b,举升油缸活塞杆54c收回,垃圾箱55下降复位。
如图12及图13所示,所述的刮平机构6安装在所述承载桥8上,该承载桥8由轮子81及桥架82,该轮子81为具有宽基低压轮胎的轮子,该宽基低压轮胎具有较好的沙滩路面适应性,接地面积大,接地比压低,作业时轮胎沉陷量小,因此清洁车作业时有较小的压实阻力,作业通过性好。所述的刮平机构6由刮平油缸61、连杆62、刮平板座63及刮平板64组成,该刮平油缸61、连杆62、刮平板座63和所述桥架82相互铰接而组成一个摇块机构。所述刮平板64安装于刮平板座63上,其由耐磨损、耐海水腐蚀的工程塑料制作。当所述刮平油缸61动作时,可带动刮平板64抬起或落下。当沙滩清洁车作业时,由控制系统控制刮平板64下落与沙面平齐,从而将散落的沙子刮平。
本发明还揭示一种沙滩清洁车清洁作业方法,上述沙滩清洁车在作业时,推铲11的吃沙深度由拖拉机4的悬挂机构和安装于拖拉机4机体上的高、低位位置传感器46、45来控制;拨沙滚轮21的吃沙深度由具有内置直线位移传感器912的滚轮油缸9来控制,当沙滩不平或沙滩内有大石头块等障碍物时,由具有浮动控制功能的拖拉机4的悬挂系统来控制避开障碍物或仿地形作业,垃圾箱55装满垃圾后,由举升翻转机构5完成卸料。
所述的直线位移传感器912内预设有两个位移长度,清洁车控制系统设有两个相应的按钮,一个为湿沙沙滩表层垃圾清理模式按钮,一个为干沙沙滩深层垃圾清理模式按钮,两按钮一般安装在驾驶室内,当驾驶员按下表层垃圾清理模式或深层垃圾清理模式的按钮时,滚轮油缸9分别伸出到设定的长度,沙滩清洁机分别按表层垃圾模式或深层垃圾清理模式工作。
如图14所示,本发明所提供的作业方法所包括的步骤为:
S1,检测沙滩清洁车作业的沙滩状态;
S2,判断所需清洁作业沙滩的状态,如果是湿沙沙滩,转向步骤S3,如果是干沙沙滩,转向步骤S4;
S3,沙滩清洁车在硬实的湿沙沙滩上作业模式;
S4,沙滩清洁车在松软的干沙沙滩上作业模式;
S5,检查并判断垃圾箱55是否装满垃圾,如果是,则转向步骤S6,如果不是,则转向步骤S1;
S6,垃圾箱55举升、翻转、卸料;
S7,垃圾箱下降复位,准备下次作业。
如图15所示,本发明提供的湿沙沙滩的作业模式所包括的步骤为:
S31,拖拉机4悬挂机构的提升油缸41活塞杆缩回,推铲11下降,当推铲11与待清洁的沙面71平齐或略低于沙面时,位于提升臂42上的感应柱47与高位位置传感器46的感应头对齐,高位位置传感器46获取位置信号;
S32,控制器根据高位位置传感器46输入的信号,控制提升油缸41停止其动作,同时开启拨沙滚轮马达、网带马达旋转,分别与两马达相连的拨沙滚轮21和筛分传送装置3工作;
S33,控制器同时控制滚轮油缸9伸出或缩回,当滚轮油缸9内置直线位移传感器912感应到设定的高位模式位移时,输送信号到控制器;
S34,控制器停止滚轮油缸9动作,放下刮平板64;
S35,沙滩清洁车前行进行湿沙沙滩作业。
如图16所示,本发明提供的干沙沙滩的作业模式所包括的步骤为:
S41,拖拉机4悬挂机构的提升油缸41活塞杆缩回,推铲11下降,当推铲11低于沙面约100mm时,位于提升臂42上的感应柱47与低位位置传感器45的感应头对齐,低位位置传感器45获取位置信号;
S42,控制器根据低位位置传感器45输入的信号,控制提升油缸41停止其动作,同时开启拨沙滚轮马达、网带马达旋转,分别与两马达相连的拨沙滚轮21和筛分传送装置3工作,
S43,控制器控制滚轮油缸9伸出或缩回,当滚轮油缸9内置直线位移传感器912感应到设定的低位模式位移时,输送信号到控制器;
S44,控制器停止滚轮油缸9动作,放下刮平板64;
S45,沙滩清洁车前行进行干沙沙滩作业。
当清洁车处于表层垃圾清理工作模式时,所述滚轮21的吃沙深度较小,可将拨沙滚轮装置2向下摆动,也就是令滚轮油缸9伸长(配合图3),这样拨沙滚轮装置2的工作面24比推铲11底部略低,弹性齿22只将沙滩上的表层垃圾抛入到后面的输送网带32,只有小量的沙子被搅起,因此可以既可保证清理效果,又可以降低拖拉机4的牵引功率的消耗;
当清洁车处于深层垃圾清理工作模式时,所述滚轮21吃沙深度大,可以将所述拨沙滚轮装置2上移,也就是令滚轮油缸9缩回(配合图4),使拨沙滚轮装置2的工作面24比推铲11底部高,其上弹性齿22将深层沙子和垃圾搅起,当弹性齿22遇到沙滩内的长度大于沙粒粒径的垃圾时,垃圾就会被耙梳出来,并堆积于推铲11的前面;随着车辆向前移动,旋转的弹性齿22把含沙子的垃圾72抛甩输送网带32上或通过推铲11及导沙板16送入到输送网带32上,可以保证清理效果又可减少滚轮负荷。
以上所述,仅为本发明的较佳实施例而已,并非用来限定本发明实施的范围。故但凡依本发明的权利要求和说明书所做的变化或修饰,皆应属于本发明专利涵盖的范围之内。