CN102566552B - Road tunnel intelligent overhaul robot facing Internet of things and 3D GIS - Google Patents
Road tunnel intelligent overhaul robot facing Internet of things and 3D GIS Download PDFInfo
- Publication number
- CN102566552B CN102566552B CN201210024824.3A CN201210024824A CN102566552B CN 102566552 B CN102566552 B CN 102566552B CN 201210024824 A CN201210024824 A CN 201210024824A CN 102566552 B CN102566552 B CN 102566552B
- Authority
- CN
- China
- Prior art keywords
- software
- automatic
- mechanical arm
- internet
- tunnel
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
- 238000004891 communication Methods 0.000 claims abstract description 12
- 238000003860 storage Methods 0.000 claims abstract description 11
- 230000003993 interaction Effects 0.000 claims abstract description 9
- 238000012423 maintenance Methods 0.000 claims description 35
- 238000004458 analytical method Methods 0.000 claims description 19
- 230000008439 repair process Effects 0.000 claims description 16
- 230000002452 interceptive effect Effects 0.000 claims description 15
- 230000002265 prevention Effects 0.000 claims description 6
- 230000005540 biological transmission Effects 0.000 claims description 4
- 238000012937 correction Methods 0.000 claims description 4
- 238000004140 cleaning Methods 0.000 claims description 3
- 238000012544 monitoring process Methods 0.000 abstract description 10
- 238000005516 engineering process Methods 0.000 abstract description 9
- 239000000463 material Substances 0.000 abstract description 4
- 230000003247 decreasing effect Effects 0.000 abstract 1
- 238000007726 management method Methods 0.000 description 30
- 230000009471 action Effects 0.000 description 16
- 238000000034 method Methods 0.000 description 12
- 230000008569 process Effects 0.000 description 10
- 238000010408 sweeping Methods 0.000 description 7
- 230000033001 locomotion Effects 0.000 description 6
- 230000006399 behavior Effects 0.000 description 3
- 230000008901 benefit Effects 0.000 description 2
- 230000008859 change Effects 0.000 description 2
- 238000013461 design Methods 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 238000009826 distribution Methods 0.000 description 2
- 238000007689 inspection Methods 0.000 description 2
- 238000009434 installation Methods 0.000 description 2
- 230000004807 localization Effects 0.000 description 2
- 230000002159 abnormal effect Effects 0.000 description 1
- 230000005856 abnormality Effects 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 230000004888 barrier function Effects 0.000 description 1
- 230000009286 beneficial effect Effects 0.000 description 1
- 210000005252 bulbus oculi Anatomy 0.000 description 1
- 238000012790 confirmation Methods 0.000 description 1
- 238000010276 construction Methods 0.000 description 1
- 238000005314 correlation function Methods 0.000 description 1
- 230000007547 defect Effects 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000007613 environmental effect Effects 0.000 description 1
- 210000001508 eye Anatomy 0.000 description 1
- 230000006872 improvement Effects 0.000 description 1
- 238000012417 linear regression Methods 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 230000006855 networking Effects 0.000 description 1
- 238000012545 processing Methods 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 239000000523 sample Substances 0.000 description 1
- 238000012216 screening Methods 0.000 description 1
- 238000004088 simulation Methods 0.000 description 1
- 238000007619 statistical method Methods 0.000 description 1
- 238000012546 transfer Methods 0.000 description 1
- 230000000007 visual effect Effects 0.000 description 1
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 1
Images



Classifications
-
- Y—GENERAL TAGGING OF NEW TECHNOLOGICAL DEVELOPMENTS; GENERAL TAGGING OF CROSS-SECTIONAL TECHNOLOGIES SPANNING OVER SEVERAL SECTIONS OF THE IPC; TECHNICAL SUBJECTS COVERED BY FORMER USPC CROSS-REFERENCE ART COLLECTIONS [XRACs] AND DIGESTS
- Y02—TECHNOLOGIES OR APPLICATIONS FOR MITIGATION OR ADAPTATION AGAINST CLIMATE CHANGE
- Y02P—CLIMATE CHANGE MITIGATION TECHNOLOGIES IN THE PRODUCTION OR PROCESSING OF GOODS
- Y02P90/00—Enabling technologies with a potential contribution to greenhouse gas [GHG] emissions mitigation
- Y02P90/02—Total factory control, e.g. smart factories, flexible manufacturing systems [FMS] or integrated manufacturing systems [IMS]
Landscapes
- Manipulator (AREA)
Abstract
The invention belongs to the field of road tunnel overhaul technology, more specifically relating to a road tunnel intelligent overhaul robot facing an Internet of things and a 3D GIS. The robot comprises a core control system, an automatic patrol system, an automatic overhaul system and a manipulator apparatus. The core control system comprises a command parse execution module, storage information management software, an Internet of things communication module, tunnel three-dimensional geographical information management, an automatic patrol control module and an automatic overhaul control module. The automatic patrol system comprises a tunnel three-dimensional geographical information scanning device and a field man-machine acousto-optic interaction apparatus. The automatic overhaul system comprises an object positioning device and a spare part consumptive material box. Both the automatic patrol system and the automatic overhaul system are controlled by the automatic patrol control module and the automatic overhaul control module. According to the invention, overhaul efficiency of a road tunnel can be raised, security risk can be decreased, intelligent monitoring and overhaul can be carried out in real time, and manpower resource is saved.
Description
Technical field
The invention belongs to vcehicular tunnel service technique field, be specifically related to the vcehicular tunnel intelligence robot for overhauling of a kind of internet of things oriented and 3D GIS.
Background technology
The development of infotech has expedited the emergence of technology of Internet of things and geographic information system technology, Internet of Things can be understood as " by information sensing equipment such as radio-frequency (RF) identification (RFID), infrared sensing, positioning system, laser scannings; according to the agreement of agreement; article or equipment and internet are coupled together and carry out information communication, realizing intelligent identification, follow the tracks of, location, monitoring and the network system of managing ".Geographic Information System is a kind of specific very important space information system.It is under computing machine hardware and software system is supported, to the relevant geographic distribution data in epigeosphere (comprising atmospheric envelope) space all or in part gather, store, the technological system of management, computing, analysis, demonstration and description, geographic information system technology has been widely used in the fields such as resource management, environmental monitoring, city planning, land management and water conservancy, forestry.
At present, the intelligent robot of internet of things oriented is widely used in a lot of fields, and intelligent robot carries out data communication by interface and Internet of things system, to complete the operation of various appointments, brings great convenience to people's life and production.But aspect the maintenance of vcehicular tunnel, conventional way is the maintenance place that tool car runs to appointment, by maintainer, on job platform, equipment or the part of needs maintenance are carried out to upkeep operation, this kind of conventional repair method both reduced overhaul efficiency, wasted human resources, increased security risk, can not realize the Real-Time Monitoring of vcehicular tunnel and maintenance again.Therefore, be badly in need of a kind of robot that utilizes above-mentioned technology to realize vcehicular tunnel Intelligent Maintenance, but at present, the intelligent robot that this kind is applied to vcehicular tunnel maintenance there is not yet report.
Summary of the invention
The present invention be directed to that the efficiency existing in the maintenance of above-mentioned vcehicular tunnel is low, security risk large, can not real-time intelligent monitoring and the defect of maintenance, and the vcehicular tunnel of a kind of internet of things oriented providing and 3D GIS intelligence robot for overhauling.
In order to solve the problems of the technologies described above, the present invention adopts following technical scheme:
The vcehicular tunnel intelligence robot for overhauling of a kind of internet of things oriented and 3D GIS, comprise core control system, automatic patrol system, automatic examination and repair system and robot device, described core control system comprises command analysis execution module, storage information management software, Internet of Things communication module, the management of tunnel three-dimensional geographic information, automatically goes on patrol control module and automatically overhaul control module, and described command analysis execution module is by IO interface and automatic patrol control module and automatically overhaul the transmission that control module is carried out control information; Described automatic patrol system comprises tunnel three-dimensional geographic information scanister, on-the-spot man-machine acousto-optic interactive device; Described automatic examination and repair system comprises target locating set, spare part and consumable case; Described automatic patrol system and automatically examination and repair system and robot device are controlled by described automatic patrol control module and automatic maintenance control module.
Beneficial effect of the present invention: the vcehicular tunnel intelligence robot for overhauling of internet of things oriented of the present invention and 3D GIS is by described Internet of Things communication module, the multidate information of vcehicular tunnel parts in Internet of Things or the control command in Internet of Things can be passed to robot of the present invention in real time, the multidate information transmitting can first store in storage information management software, call again when needed these information, also can be directly passed to command analysis execution module described multidate information is analyzed, and then call corresponding management control software and complete specific action.
Robot of the present invention by tunnel three-dimensional geographic information, manage and three-dimensional geographic information surface sweeping device surface sweeping in real time tunnel in three-dimensional geographic information, measure and writing scan to parts corresponding state data and store in spatial database, for the state of parts in Real-Time Monitoring vcehicular tunnel provides correlation data, and can monitor out the parts that need maintenance in vcehicular tunnel, realize the object of intellectual monitoring.
Because described automatic patrol system and automatic examination and repair system are controlled by described automatic patrol control module and automatic maintenance control module, simultaneously, in core control system, control under the control of software, described robot device can independently complete the repair and maintenance work of parts in vcehicular tunnel, reaches the object of intelligence patrol and maintenance.
To sum up, robot of the present invention can independently go on patrol and service work, has both saved human resources and labour cost, raising overhaul efficiency, has reduced security risk, has realized again the real-time intelligent monitoring and maintenance of vcehicular tunnel.
Further, described automatic patrol control module comprises on-the-spot man-machine acousto-optic interactive maintenance software, travels and calibrates control software, software, automatic charging management software, imitative traffic police's management software, urgent rescue management software, administration of the prevention and control software, spare part SCS are controlled in roadupkeep.
Further, described automatic maintenance control module comprises target identification orientation management, transducer calibration overhaul management software, mechanical arm management and mechanical arm correction control software.
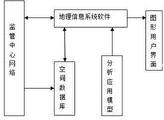
Further, described three-dimensional geographic information management comprises Geographic Information System (GIS) software, spatial database, analytical applications model, graphic user interface and supervision center network.
Further, described target identification orientation management comprises hundred-metre pile identification positioning control software, supply socket identification positioning control software, Emergency Stop Area identification positioning control software, sensor identification positioning control software, spare part and consumable case accessory identification positioning control software and other tunnel Parts Recognition positioning control software; Described hundred-metre pile, supply socket, Emergency Stop Area, sensor and other tunnel parts are by three-dimensional geographic information technology identification location.
Further, described mechanical arm management comprises that virtual reality interaction suite, autonomous learning are controlled software, software is controlled in autonomous maintenance; Virtual reality interaction suite comprises data glove and the helmet.
Further, described three-dimensional geographic information scanister comprises a plurality of 360 of robotic surfaces that are installed on
0the The Cloud Terrace rotating freely and be installed on the 3D high-definition camera on described The Cloud Terrace; Described target locating set comprises and is a plurality ofly installed on 360
0radio-frequency card reader on the The Cloud Terrace rotating freely and 3D high-definition camera.
Further, the man-machine acousto-optic interactive device in described scene includes audio sensor, light sensor, signal processor, signal converter and sound and light signal transceiver.
Further, described spare part and consumable case comprises a plurality of casings with automatic gun magazine structure; The identification location of spare part and consumable case accessory adopts REID.
Further, described robot device comprises automatic charging machinery hand, traffic administration mechanical arm, roadupkeep mechanical arm, urgent rescue mechanical arm, fire-fighting sprinkler head, spare part exchange mechanical arm, transducer calibration mechanical arm, replacing sensor mechanical arm, cleaning mechanical arm, member replacing mechanical arm and other part servicing machine hands.
Accompanying drawing explanation
Fig. 1 is the construction module figure of the vcehicular tunnel intelligence robot for overhauling of the present embodiment internet of things oriented and 3D GIS;
Fig. 2 is embodiment of the present invention three-dimensional geographic information administration module schematic diagram;
Fig. 3 is that Fig. 1 embodiment goes on patrol control flow chart automatically;
Fig. 4 is Fig. 1 embodiment target localization control flow chart.
Embodiment
Below in conjunction with the drawings and specific embodiments, the present invention is further detailed explanation:
As shown in Figure 1, the vcehicular tunnel of a kind of internet of things oriented of the present embodiment and 3D GIS intelligence robot for overhauling, comprises core control system, automatic patrol system and automatic examination and repair system and robot device.In described core control system, the corresponding software of controlling is controlled respectively described automatic patrol system, automatic examination and repair system and robot device.
Described core control system comprises command analysis execution module, storage information management software, Internet of Things communication module, the management of tunnel three-dimensional geographic information, automatically goes on patrol control module and automatically overhaul control module, described command analysis execution module carries out the mutual of information by Internet of Things communication module and network, and this command analysis execution module is by IO interface and automatic patrol control module and automatically overhaul the transmission that control module is carried out control information; Described automatic patrol system comprises tunnel three-dimensional geographic information scanister, on-the-spot man-machine acousto-optic interactive device; Described automatic examination and repair system comprises target locating set, spare part and consumable case; Described automatic patrol system and automatically examination and repair system and robot device are controlled by described automatic patrol control module and automatic maintenance control module.
Described robot device comprises automatic charging machinery hand, traffic administration mechanical arm, roadupkeep mechanical arm, urgent rescue mechanical arm, fire-fighting sprinkler head, spare part exchange mechanical arm, transducer calibration mechanical arm, replacing sensor mechanical arm, cleaning mechanical arm, member replacing mechanical arm and other part servicing machine hands.
Described tunnel three-dimensional geographic information management comprises Geographic Information System (GIS) software, spatial database, analytical applications model, graphic user interface and supervision center network.
Described automatic patrol control module comprises on-the-spot man-machine acousto-optic interactive maintenance software, travels and calibrates control software, software, automatic charging management software, imitative traffic police's management software, urgent rescue management software, administration of the prevention and control software, spare part SCS are controlled in roadupkeep.
Described automatic maintenance control module comprises target identification orientation management, transducer calibration overhaul management software, mechanical arm management and mechanical arm correction control software.
Command analysis execution module in described core control system carries out the mutual of information by Internet of Things communication module and network, the information of transmitting by Internet of Things communication module also can first store in storage information management software, calls when needed control execution various command voluntarily in command analysis execution module again; The network communication address of described network communication module coordinates software port numbers by IP address of equipment, TCP/UDP protocol data bag for single status message, file transfer FTP, server and client are based on http(Web) Spatial Data Interoperability, machine client uses XML exchange files, and true man client is visual mutual with HTML.
The instruction of transmitting by IO interface due to described command analysis execution module can be called described tunnel three-dimensional geographic information and be managed, on-the-spot man-machine acousto-optic interactive maintenance software, software is controlled in roadupkeep, travel and calibrate control software, automatic charging management software, imitative traffic police's management software, urgent rescue management software, administration of the prevention and control software, spare part SCS, target identification orientation management, transducer calibration overhaul management software, mechanical arm management and mechanical arm are proofreaied and correct and are controlled software, and tunnel three-dimensional geographic information scanister in described automatic patrol system, on-the-spot man-machine acousto-optic interactive device, automatic charging machinery hand, traffic administration mechanical arm, roadupkeep mechanical arm, urgent rescue mechanical arm, fire-fighting sprinkler head, target locating set in spare part exchange mechanical arm and described automatic examination and repair system, spare part and consumable case, maintenance manipulator device is all controlled software control accordingly by core control system, therefore, when command analysis, carry out administration module and call after corresponding management control software, corresponding management control software completes specific action by controlling corresponding device or mechanical arm.
Because target identification orientation management, transducer calibration overhaul management software, mechanical arm management, mechanical arm are proofreaied and correct the design of controlling software and various maintenance manipulators, the present invention can realize autonomous maintenance and the replacing of parts in vcehicular tunnel, and then improve the security risk of overhaul efficiency, reduction true man maintenance, realize the object to the Intelligent Maintenance of vcehicular tunnel.
By exercising and calibrate control software, described robot replaces maintainer at maintenance vehicular operation, can travelling from main control tool car, and can independently calibrate under steam the tool car deviation of travelling, thereby reach the object of autonomous patrol in vcehicular tunnel, simultaneously, in roadupkeep, control software, automatic charging management software, imitative traffic police's management software, urgent rescue management software, administration of the prevention and control software, under the management of spare part SCS is controlled, robot of the present invention can complete the maintenance of vcehicular tunnel when autonomous patrol, the management of traffic, the work of fire-fighting and urgent rescue, in the time self need to charging or exchange in spare part and consumable case accessory, also can carry out the exchange work of recharging or accessory.
By scene man-machine acousto-optic interactive maintenance software and on-the-spot man-machine acousto-optic interactive device, can carry out speech recognition with synthetic, running into special circumstances, the true man of control center can realize the on-the-spot outdoor scene of remote reviewing, adapter robot behavior action ,Rang robot imitates in real time true man's action maintenance work is carried out in scene.
The prediction scheme program that control software, automatic charging management software, imitative traffic police's management software, urgent rescue management software and administration of the prevention and control software are controlled software, travel and calibrated in described roadupkeep stores in storage information management software in advance, by the control of the man-machine acousto-optic interactive maintenance in scene software, carry out speech recognition with synthetic, running into special circumstances, as while there is traffic hazard, the on-the-spot outdoor scene of true man's remote reviewing of control center, adapter robot behavior action ,Rang robot imitates in real time true man and implements on-the-spot rescue work.
Described target identification orientation management comprises hundred-metre pile identification positioning control software, supply socket identification positioning control software, Emergency Stop Area identification positioning control software, sensor identification positioning control software, spare part and consumable case accessory identification positioning control software and other tunnel Parts Recognition positioning control software, and the identification location of spare part and consumable case accessory adopts REID.Hundred-metre pile, supply socket, Emergency Stop Area, sensor and other tunnel parts are identified location by three-dimensional geographic information technology.
Described mechanical arm management comprises that virtual reality interaction suite, autonomous learning are controlled software, software is controlled in autonomous maintenance.Described virtual reality interaction suite comprises data glove and the helmet.
The autonomous learning of mechanical arm management is controlled the autonomous learning of software control mechanical arm, its learning process is by true man's demonstration movement digitized process, and record analysis modeling realization: first on-the-spot faithful record true man demonstration movement overall process 3D image, the various elemental motion of Analysis and Screening and body joints 3D position sequence kinematic parameter, build manipulator behavior model parameter, optimal design joint (degree of freedom) number, numerical control programming is realized each micromotion, virtual reality simulation or the sequence of actual presentation mechanical arm, and contrast the playback of 3D image, determine whether the 3D graph of errors that trickle coordination coordinates meets job requirement, if do not meet, do not continue to regulate parameter, if satisfied store action model program into.
The inspection operation of software control mechanical arm is controlled in the autonomous maintenance of mechanical arm management, because true man's demonstration movement process digitized record is in action model program, when system is sent after mechanical arm maintenance instruction, system is by the current action command parameter of automatic analysis, state machine 3D position, and the instantiation parameter of each micromotion model of calculating revision mechanical arm, press afterwards instance parameter and start storage action model program, according to the indication of storage action model, under the control of autonomous maintenance software, corresponding mechanical arm will be carried out service work simultaneously.Maintenance process will, by shooting real time record in the storer of core control system, occur that faulty operation will return to error message and carry out abnormality processing, to recalibrate operation.
The virtual reality interaction suite of described mechanical arm management is realized the mutual remote control of Robot Virtual reality: center control personnel dress data glove and the helmet in virtual reality interaction suite, switch and enable the long-range interactive mode of Virtual Reality Network, on the described helmet, display is installed, by described display center, control the stereopsis at scene, personnel's observable tunnel, center control personnel by the positional information of own arm motion by data glove to the instruction of on-the-spot mechanical arm sending action, mechanical arm receives action command and is converted to program parameter, and then perform an action, center is controlled the rotation information of personnel's neck and eyeball and to the 3D high-definition camera The Cloud Terrace of robot, is sent out action command by the sensor and the data message dispensing device that arrange on the helmet, camera The Cloud Terrace is under the control of action command, with center, control the rotation of personnel's neck and new perspective images is returned in two eye devices on the helmet, this device is converted into the image of sending back to real-time state parameter and feeds back to control center, the state parameter data that feed back to are using the material as mechanical arm study, for playback.
Described three-dimensional geographic information scanister comprises a plurality of 360 of robotic surfaces that are installed on
0the The Cloud Terrace rotating freely and be installed on the 3D high-definition camera on described The Cloud Terrace.The man-machine acousto-optic interactive device in described scene includes audio sensor, light sensor, signal processor, signal converter and sound and light signal transceiver.Described target locating set comprises and is a plurality ofly installed on 360
0radio-frequency card reader on the The Cloud Terrace rotating freely and 3D high-definition camera.
Described spare part and consumable case comprises a plurality of casings with automatic gun magazine structure, in different casings, place different accessories, as illuminating lamp, signal lamp, sensor, and post electronic tag on the casing of every kind of accessory, utilize REID, by corresponding information on the reader identification electronic tag in target locating set, after analyzing via the target identification orientation management of core control system, control the grasping manipulation that corresponding mechanical arm completes the accessory of appointment, and then complete more changing jobs of tunnel part.
As shown in Figure 2, the module principle figure of described three-dimensional geographic information management, shown in supervision center network monitoring three-dimensional geographic information system software resolve the execution of instruction and the collection of spatial data and transmission, in the tunnel obtaining by three-dimensional geographic information scanister, components information is processed in Geographic Information System (GIS) software, Geographic Information System (GIS) software is called data in spatial database and the data message of collection is analyzed, call pre-stored analytical applications model simultaneously, foundation by described analytical applications model so surface sweeping to information output in graphic user interface, thereby complete surface sweeping and the monitoring of parts in tunnel.
Be illustrated in figure 3 the present embodiment robot and automatically go on patrol control flow chart, first the present embodiment robot receives and resolves network control command information, start automatic patrol system travels in tunnel, in travelling, by robot remote control, differential adjusting robot, take advantage of tool car both sides motor, calibrate the skew in travel direction; In the radar probe detection working direction of installing on the tool car wheel of taking advantage of by robot, whether there is abnormal obstacle, have and feed back obstacle information, call roadupkeep and control programmed control roadupkeep mechanical arm in software and automatically repair the manhole cover of subsideing, automatically move the operations such as barrier; Because robot upper part and bottom are provided with a plurality of 360
0the The Cloud Terrace rotating freely and be arranged on a plurality of 3D high-definition cameras on The Cloud Terrace, therefore, under steam by the three-dimensional geographic information in a plurality of 3D high-definition cameras surface sweeping in real time tunnel, and the control of the Geographic Information System (GIS) software by described three-dimensional geographic information administration module, measure and writing scan to parts corresponding state data and store in spatial database, compare whether exceed anticipation error with application model, if exceed, call other corresponding facility prediction scheme programs and safeguard and maintenance; Under steam, as hundred-metre pile, call corresponding travel and calibration software in the position deviation of corresponding program calibration distance travelled; As socket or Emergency Stop Area, whether call in automatic charging management software or spare part SCS corresponding process analysis needs to charge or exchange spare part and consumable, if need to, control corresponding automatic charging machinery hand or spare part exchange mechanical arm charges or spare part exchanges; In travelling, judge whether to arrive vcehicular tunnel outlet, if arrive report information, and wait for that by prediction scheme instruction continuation patrol or standby new instruction arrives.
Be illustrated in figure 4 the present embodiment robot target identification positioning control process flow diagram, facility parts in passing through 3D high-definition camera surface sweeping tunnel, and it is carried out to collection and the analysis of relevant information, and will start target identification orientation management after defining the parts that need repairing or change, judge that part to be detected is whether in can process range, if not in can process range, the driving on robot remote-controlled movement tool car or tool car and manned The Cloud Terrace are to approaching most Awaiting Overhaul position, analyze the three-dimensional data information of Awaiting Overhaul parts, and call corresponding positioning control software according to analysis result, comprise hundred-metre pile positioning control software, supply socket positioning control software, Emergency Stop Area positioning control software, sensor localization is controlled software, other tunnel position components are controlled software and spare part and consumable case accessory positioning control software, the corresponding mechanical arm of described positioning control software control completes crawl, dismounting, the operations such as demarcation, simultaneously, mechanical arm proofread and correct to be controlled software by according to the action of the three-dimensional geographic information surface sweeping camera scanning work mechanical arm of appointment, the feedback information obtaining and self pre-stored manipulator joint operating state three-dimensional space data information compare, whether analytical error exceeds normal range, thereby work robot is carried out to real time correction, so that work robot can accurately complete inspection operation, after having overhauled, the 3D position that again gathers the information of these parts and record these parts is in the storage information management software of core control system, after this can carry out identification location service work next time.
The calibration principle of the present embodiment sensor: the sensor of interest of identification appointment, according to identification orientation, move and demarcate apparatus for examination and repair to the position that approaches most target, Continuous Observation, record onboard sensor and sensor of interest data under physical environment, with subenvironment case, cover onboard sensor and sensor of interest afterwards, allotment subenvironment parameter, Continuous Observation, record the stable data of onboard sensor and sensor of interest, parameter for 2 of linear transducer Fast Calibration physical environment and subenvironments, and calculate linear formula, if multiple spot, can the more accurate parameter formula of linear regression fit, for nonlinear transducer, demarcate physical environment and subenvironment multiple spot parameter, and calculate form known non-linear formula parameter, finally allocate subenvironment parameter, Continuous Observation, record onboard sensor and sensor of interest is stablized data, if error is returned to normal calibration formula parameter in allowed band, otherwise change sensor of interest.
The present embodiment is changed sensor of interest control flow: the type of identification intended target sensor, locate its position, mobile manipulator is to sensor of interest position, call dismounting target and moved dismounting, call installation targets and moved installation, invocation target status checking program, if error is returned to normal parameter in allowed band, otherwise circuit bug is installed in report, after confirmation, again install or directly return.
The present embodiment robot is owing to being the intelligent robot for overhauling of internet of things oriented, lifetime and the historical archives data of all tunnels of the comprehensive storage administration of the host computer server database facility article that are therefore mated, comprise newly-built, dynamically follow the tracks of and revise, inquiry, Statistical Analysis Report etc., logistics distribution transhipment part warehouses at different levels and consumption are used the machine of consumptive material to have per capita slave computer networking to collect lastest imformation to host computer, slave computer is joined RFID and 3D high-definition image recognition device read-write target information, substitute the three-dimensional relative positioning of complex superposition of traditional GPS, described three dimensions identification locating information coordinate comprises the along slope coordinate of hundred-metre pile calibration, the lateral coordinates of driving initial point calibration, The Cloud Terrace lifting elevation coordinate, consumption is used the robot of consumptive material to support correlation function as a part of tunnel Internet of Things.
Above-described is only the preferred embodiment of the present invention, should be understood that for a person skilled in the art, not departing under the prerequisite of structure of the present invention, can also make some distortion and improvement, these can not affect effect of the invention process and practical applicability.
Claims (10)
1. the vcehicular tunnel of an internet of things oriented and 3D GIS intelligence robot for overhauling, is characterized in that: comprise core control system, automatic patrol system, automatic examination and repair system and robot device; Described core control system comprises command analysis execution module, storage information management software, Internet of Things communication module, the management of tunnel three-dimensional geographic information, automatically goes on patrol control module and automatically overhaul control module, and described command analysis execution module is by IO interface and automatic patrol control module and automatically overhaul the transmission that control module is carried out control information; Described automatic patrol system comprises tunnel three-dimensional geographic information scanister, on-the-spot man-machine acousto-optic interactive device; Described automatic examination and repair system comprises target locating set, spare part and consumable case; Described automatic patrol system and automatically examination and repair system and robot device are controlled by described automatic patrol control module and automatic maintenance control module.
2. the vcehicular tunnel of internet of things oriented according to claim 1 and 3D GIS intelligence robot for overhauling, is characterized in that:
Described automatic patrol control module comprises on-the-spot man-machine acousto-optic interactive maintenance software, travels and calibrates control software, software, automatic charging management software, imitative traffic police's management software, urgent rescue management software, administration of the prevention and control software, spare part SCS are controlled in roadupkeep.
3. the vcehicular tunnel of internet of things oriented according to claim 1 and 3D GIS intelligence robot for overhauling, is characterized in that: described automatic maintenance control module comprises target identification orientation management, transducer calibration overhaul management software, mechanical arm management and mechanical arm correction control software.
4. the vcehicular tunnel of internet of things oriented according to claim 1 and 3D GIS intelligence robot for overhauling, is characterized in that: described three-dimensional geographic information management comprises Geographic Information System (GIS) software, spatial database, analytical applications model, graphic user interface and supervision center network.
5. the vcehicular tunnel of internet of things oriented according to claim 3 and 3D GIS intelligence robot for overhauling, is characterized in that: described target identification orientation management comprises hundred-metre pile identification positioning control software, supply socket identification positioning control software, Emergency Stop Area identification positioning control software, sensor identification positioning control software, spare part and consumable case accessory identification positioning control software and other tunnel Parts Recognition positioning control software; Hundred-metre pile, supply socket, Emergency Stop Area, sensor and other tunnel parts are by 3D GIS identification location.
6. the vcehicular tunnel of internet of things oriented according to claim 3 and 3D GIS intelligence robot for overhauling, is characterized in that: described mechanical arm management comprises that virtual reality interaction suite, autonomous learning are controlled software, software is controlled in autonomous maintenance; Virtual reality interaction suite comprises data glove and the helmet.
7. the vcehicular tunnel of internet of things oriented according to claim 1 and 3D GIS intelligence robot for overhauling, is characterized in that: described three-dimensional geographic information scanister comprises a plurality of 360 of robotic surfaces that are installed on
0the The Cloud Terrace rotating freely and be installed on the 3D high-definition camera on described The Cloud Terrace; Described target locating set comprises and is a plurality ofly installed on 360
0radio-frequency card reader on the The Cloud Terrace rotating freely and 3D high-definition camera.
8. the vcehicular tunnel of internet of things oriented according to claim 1 and 3D GIS intelligence robot for overhauling, is characterized in that: the man-machine acousto-optic interactive device in described scene includes audio sensor, light sensor, signal processor, signal converter and sound and light signal transceiver.
9. the vcehicular tunnel of internet of things oriented according to claim 1 and 3D GIS intelligence robot for overhauling, is characterized in that: described spare part and consumable case comprises a plurality of casings with automatic gun magazine structure; The identification location of spare part and consumable case accessory adopts REID.
10. the vcehicular tunnel of internet of things oriented according to claim 1 and 3D GIS intelligence robot for overhauling, is characterized in that: described robot device comprises automatic charging machinery hand, traffic administration mechanical arm, roadupkeep mechanical arm, urgent rescue mechanical arm, fire-fighting sprinkler head, spare part exchange mechanical arm, transducer calibration mechanical arm, replacing sensor mechanical arm, cleaning mechanical arm, member replacing mechanical arm and other part servicing machine hands.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201210024824.3A CN102566552B (en) | 2012-02-06 | 2012-02-06 | Road tunnel intelligent overhaul robot facing Internet of things and 3D GIS |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201210024824.3A CN102566552B (en) | 2012-02-06 | 2012-02-06 | Road tunnel intelligent overhaul robot facing Internet of things and 3D GIS |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN102566552A CN102566552A (en) | 2012-07-11 |
| CN102566552B true CN102566552B (en) | 2014-01-22 |
Family
ID=46412196
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN201210024824.3A Expired - Fee Related CN102566552B (en) | 2012-02-06 | 2012-02-06 | Road tunnel intelligent overhaul robot facing Internet of things and 3D GIS |
Country Status (1)
| Country | Link |
|---|---|
| CN (1) | CN102566552B (en) |
Families Citing this family (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN105159157B (en) * | 2015-07-31 | 2017-11-21 | 重庆世纪精信实业(集团)有限公司 | Video auxiliary system for industry mechanical arm remote control |
| CN105373130A (en) * | 2015-12-15 | 2016-03-02 | 福建省特种设备检验研究院 | Special device accident on-site information detection system based on stereo modeling |
| CN106131493A (en) * | 2016-07-20 | 2016-11-16 | 绥化学院 | Come personally based on virtual reality far-end the motion sensing control system of intelligent fire robot |
| CN106293087B (en) * | 2016-08-09 | 2019-07-26 | 联想(北京)有限公司 | A kind of information interacting method and electronic equipment |
| CN111491140B (en) * | 2020-05-15 | 2021-05-11 | 深圳金三立视频科技股份有限公司 | Power transmission cable video line patrol method and terminal |
| CN114463968A (en) * | 2021-12-14 | 2022-05-10 | 江苏齐物信息科技有限公司 | Inspection robot communication system and communication method based on Internet of things platform |
| CN115240447B (en) * | 2022-07-29 | 2023-04-25 | 重庆电子工程职业学院 | Intelligent traffic obstacle stake |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009121994A (en) * | 2007-11-15 | 2009-06-04 | Ishikawa Tekkosho:Kk | Self-propelled in-tube inspection robot |
| CN202103362U (en) * | 2010-12-24 | 2012-01-04 | 河南省电力公司洛阳供电公司 | Intelligent cable tunnel patrol robot |
| CN201989147U (en) * | 2010-12-29 | 2011-09-28 | 沈阳新松机器人自动化股份有限公司 | Inspection robot for cable tunnel |
-
2012
- 2012-02-06 CN CN201210024824.3A patent/CN102566552B/en not_active Expired - Fee Related
Also Published As
| Publication number | Publication date |
|---|---|
| CN102566552A (en) | 2012-07-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN102566552B (en) | Road tunnel intelligent overhaul robot facing Internet of things and 3D GIS | |
| CN111897332B (en) | Semantic intelligent substation robot humanoid inspection operation method and system | |
| CN116619360B (en) | Collaborative perception, decision-making and control method of virtual-reality fusion of multiple robots in underground coal mines | |
| CN115793649B (en) | Automatic cable pit inspection device and inspection method | |
| CN111958591A (en) | Autonomous inspection method and system for semantic intelligent substation inspection robot | |
| CN113325837A (en) | Control system and method for multi-information fusion acquisition robot | |
| US12282312B2 (en) | Robot staging area management | |
| EP3590016A1 (en) | Method and system for simultaneous localization and sensor calibration | |
| US20230064071A1 (en) | System for 3d surveying by an autonomous robotic vehicle using lidar-slam and an estimated point distribution map for path planning | |
| CN111694285A (en) | Wharf 3D intelligent management and control platform suitable for marine loading and unloading arm | |
| CN114527763B (en) | Intelligent inspection system and method based on target detection and SLAM composition | |
| CN112272236A (en) | Routing inspection system and method based on BIM | |
| CN111590562A (en) | A robot-based unmanned store container monitoring system | |
| Gan et al. | Automated indoor 3D scene reconstruction with decoupled mapping using quadruped robot and LiDAR sensor | |
| CN118333484A (en) | Formula logistics management and control method and system based on digital twin technology | |
| CN115937415A (en) | A digital twin system of continuous casting robot based on 3D modeling technology | |
| CN120244542A (en) | A contact network arm bolt automatic fastening system and method | |
| CN118262071A (en) | Engineering machinery mixed reality digital twin management and control method and system | |
| CN115661966A (en) | A patrol inspection system and method based on augmented reality | |
| CN202583824U (en) | Road tunnel intelligent trouble-shooting robot oriented to internet of things and 3D GIS | |
| CN221436480U (en) | Construction site inspection robot and construction site inspection system | |
| CN120278599A (en) | Intelligent 3D imaging safety quality monitoring system for building | |
| França et al. | Autonomous robotic system for visual inspection in electrical substations and cable galleries | |
| CN117539172A (en) | Intelligent control system of electrolysis workshop based on digital twin system | |
| Vidyadhar et al. | An IoT based obstacle detection and line follower robot using LabVIEW |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20140122 Termination date: 20190206 |
|
| CF01 | Termination of patent right due to non-payment of annual fee |