CN101799529B - 初始位置确定方法、定位方法及定位装置 - Google Patents
初始位置确定方法、定位方法及定位装置 Download PDFInfo
- Publication number
- CN101799529B CN101799529B CN200910166191.8A CN200910166191A CN101799529B CN 101799529 B CN101799529 B CN 101799529B CN 200910166191 A CN200910166191 A CN 200910166191A CN 101799529 B CN101799529 B CN 101799529B
- Authority
- CN
- China
- Prior art keywords
- satellite
- initial position
- distance
- candidate
- signal
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Expired - Fee Related
Links
Images


















Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S19/00—Satellite radio beacon positioning systems; Determining position, velocity or attitude using signals transmitted by such systems
- G01S19/38—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system
- G01S19/39—Determining a navigation solution using signals transmitted by a satellite radio beacon positioning system the satellite radio beacon positioning system transmitting time-stamped messages, e.g. GPS [Global Positioning System], GLONASS [Global Orbiting Navigation Satellite System] or GALILEO
- G01S19/42—Determining position
- G01S19/45—Determining position by combining measurements of signals from the satellite radio beacon positioning system with a supplementary measurement
Landscapes
- Engineering & Computer Science (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Computer Networks & Wireless Communication (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Position Fixing By Use Of Radio Waves (AREA)
Abstract
一种用于确定进行定位运算时的初始位置的初始位置确定方法、定位方法及定位装置。在地球上,设定假想包含便携式电话机(2)所在地的位置范围、即框架,并在该框架内格子状地配设被称为网格的候补位置。而且,分别对多个网格,计算出与GPS卫星之间的几何学的距离的尾数部分和已观测到的伪距的尾数部分之差,作为第一APR值,并按第一APR值从小到大的顺序将网格限定为N个。之后,通过将限定的N个网格作为临时初始位置进行基于GPS卫星信号的位置收敛运算,进一步将网格限定至M(<N)个。而且,分别对限定的M个网格,计算出与GPS卫星之间的几何学的距离和已观测到的伪距之差,作为第二APR值,并选定第二APR值最小的网格作为定位运算所利用的初始位置。
Description
技术领域
本发明涉及一种用于确定基于来自定位用卫星的卫星信号进行定位运算时的初始位置的初始位置确定方法、定位方法及定位装置。
背景技术
近年来,作为利用定位用信号的定位系统公知有GPS(GlobalPositioning System:全球定位系统),其用于内置于便携式电话机或汽车导航装置等中的定位装置。在GPS中,通过进行基于多个GPS卫星的位置、从各个GPS卫星到本机的伪距等的信息而求得表示本机的位置的三维坐标值和时钟误差的4个参数的值的定位运算,从而对本机的当前位置进行定位。
在基于GPS的定位中,由于需要有作为定位运算(更准确地说是位置收敛运算)的初始值的定位装置的位置(以下,称为“初始位置”),所以开发了用于求得初始位置的各种技术。例如,在日本专利文献1中披露有这样的技术:利用通过上次的定位运算求得的定位位置所包含的位置误差,确定本次的定位运算所使用的初始位置。
专利文献1:日本特开2006-71460号公报
现有的定位装置通常利用搭载在来自GPS卫星的卫星信号上的扩频码的一种、即PRN(Pseudo Random Noise:伪随机噪声)码的尾数(端数)部分(码相位),判定初始位置。PRN码是1.023Mbps位率、1023bit(=1msec=300km)位长的信号。因此,如果初始位置在距离真实位置150km以内的误差范围中,则可以利用PRN码的尾数部分(码相位)进行位置收敛运算。因此,在现有的定位运算中,需要初始位置的误差在150km以内。
不过,在实际中,存在有难以获得接近定位装置的真实位置的初始位置的情况。最典型的例子是在乘飞机进行移动之后接通定位装置的电源后才开始进行定位的情况。有时,也可能有提供离开定位装置的真实位置500km或1000km的初始位置的情况。优选在这种情况下,也能够确定接近定位装置的真实位置的初始位置。
发明内容
鉴于上述的问题,本发明的目的在于提供一种确定基于来自定位用卫星的卫星信号进行定位运算时的初始位置的初始位置确定方法、定位方法及定位装置。
用于解决上述问题的本发明的第一方面是一种确定基于来自定位用卫星的卫星信号进行定位运算时的初始位置的初始位置确定方法,上述初始位置确定方法包括:分别将多个第一候补位置作为临时初始位置,进行基于上述卫星信号的位置收敛运算;基于上述位置收敛运算的运算结果,从上述多个第一候补位置中选择第二候补位置;以及从上述第二候补位置中,利用上述卫星信号选择上述初始位置。
此外,作为本发明的另一方面,可以构成为基于来自定位用卫星的卫星信号进行定位运算的定位装置,上述定位装置包括:位置收敛运算部,分别将多个第一候补位置作为临时初始位置,进行基于上述卫星信号的位置收敛运算;第二候补位置选择部,基于上述位置收敛运算的运算结果,从上述多个第一候补位置中选择第二候补位置;初始位置选择部,从上述第二候补位置中,选择用上述卫星信号进行上述定位运算时的初始位置;以及定位部,用上述已选择的初始位置基于上述卫星信号进行定位运算。
根据该本发明的第一方面等,分别对多个第一候补位置,将改第一候补位置作为临时初始位置进行基于卫星信号的位置收敛运算,并基于其运算结果从多个第一候补位置中选择第二候补位置。而且,从已选择的第二候补位置中,选择用卫星信号进行定位运算时的初始位置。
例如,能够通过判定位置收敛运算的解是否收敛,从多个候补位置中限定出可以作为初始位置采用的候补位置。而且,能够通过从限定的候补位置中用卫星信号选择初始位置,获得接近定位装置的真实位置的初始位置。
此外,作为本发明的第二方面可以构成为根据本发明第一方面的初始位置确定方法,上述初始位置确定方法包括:对设定在方圆至少300km以上的规定范围中的各第三候补位置,基于用上述第三候补位置及上述定位用卫星的位置计算出的第一距离和基于上述卫星信号计算出的第二距离之差,从上述第三候补位置中选择规定数的上述第一候补位置。
根据该本发明的第二方面,对设定在方圆至少300km以上的规定范围中的各第三候补位置,基于用上述第三候补位置及定位用卫星的位置计算出的第一距离和基于卫星信号计算出的第二距离之差,从第三候补位置中选择规定数的第一候补位置。
如果根据第三候补位置与定位用卫星的物理位置关系计算出的第一距离和基于卫星信号计算出的第二距离之差较小,则该第三候补位置接近定位装置的所在地的可能性高。因此,诸如通过按第一距离和第二距离之差从小到大的顺序选择规定数的第一候补位置,可以在位置收敛运算的前阶段有效地限定出第一候补位置。通过这样,由于不需要对所有的第一候补位置进行位置收敛运算,所以能够大幅度地削减计算量。此外,通过以在方圆至少300km以上的规定范围中设定第三候补位置的方式,可以将广大的范围作为对象进行初始位置的搜索。
此外,作为本发明的第三方面可以构成为在本发明的第二方面的初始位置确定方法中,上述第三候补位置格子状地配设在上述规定范围中。
根据该本发明的第三方面,通过将第三候补位置格子状地配设在规定范围中,使计算机的计算变为容易,还能够在规定范围中均匀配置候补位置。
此外,作为本发明的第四方面,可以构成为根据本发明的第一至第三方面中的任一方面的初始位置确定方法,其中,选择上述初始位置就是基于用上述第二候补位置及上述定位用卫星的位置计算出的第三距离和基于上述卫星信号计算出的第四距离之差,从上述第二候补位置中选择上述初始位置。
根据该本发明的第四方面,基于用第二候补位置及定位用卫星的位置计算出的第三距离和基于卫星信号计算出的第四距离之差,从第二候补位置中选择初始位置。
如果根据第二候补位置与定位用卫星的物理位置关系计算出的第三距离和基于卫星信号计算出的第四距离之差较小,则该第二候补位置接近定位装置的所在地的可能性高。因此,能够通过诸如选择第三距离和第四距离之差最小的第二候补位置作为初始位置,求出接近定位装置的真实位置的初始位置。
此外,作为本发明的第五方面,可以构成为根据本发明的第一至第四方面中的任一方面的初始位置确定方法,上述初始位置确定方法包括:基于上述初始位置和上述定位用卫星的位置及轨道计算出的第一多普勒频率和基于上述卫星信号计算出的第二多普勒频率之差,判定上述初始位置的适当与否。
根据该本发明的第五方面,基于初始位置和定位用卫星的位置及轨道计算出的第一多普勒频率和基于卫星信号计算出的第二多普勒频率之差,判定初始位置的适当与否。通过这样,能够基于多普勒频率判定初始位置的妥当性。
此外,作为第六方面的发明,可以提供以下初始位置确定方法:在本发明的第五方面的初始位置确定方法中的判定上述初始位置的适当与否包括:用上述初始位置及定位装置的移动速度矢量和根据上述定位用卫星的轨道求得的上述定位用卫星的位置及移动速度矢量,计算出上述第一多普勒频率。
根据该本发明的第六方面,由于多普勒频率的计算不仅考虑到定位用卫星的移动速度及移动方向,还考虑到定位装置的移动速度及移动方向,所以可以更准确地求得多普勒频率,能够更准确地判定初始位置的妥当性。
此外,作为第七方面的发明,可以提供一种利用根据本发明的第一至第六方面中的任一方面的初始位置确定方法确定的初始位置,基于所述卫星信号进行定位运算的定位方法。
附图说明
图1是定位系统的概略构成示意图。
图2是初始位置确定的原理的说明图。
图3是初始位置确定的原理的说明图。
图4是初始位置确定的原理的说明图。
图5是表示便携式电话机的功能构成的框图。
图6是表示一例便携式电话机的ROM所存储的数据的图。
图7是表示一例便携式电话机的闪存ROM所存储的数据的图。
图8是表示一例便携式电话机的RAM所存储的数据的图。
图9是表示一例初始位置可靠度设定数据的数据构成的图。
图10是表示一例测量数据的数据构成的图。
图11是表示一例网格数据的数据构成的图。
图12是表示一例候补初始位置数据的数据构成的图。
图13是表示主处理的流程的流程图。
图14是表示定位处理的流程的流程图。
图15是表示定位处理的流程的流程图。
图16是表示扩张网格搜索处理的流程的流程图。
图17是表示第一APR值计算处理的流程的流程图。
图18是表示第二APR值计算处理的流程的流程图。
图19是表示多普勒检验处理的流程的流程图。
图20是表示一例实验结果的图。
图21是表示第二定位处理的流程的流程图。
图22是表示变形例中的便携式电话机的功能构成的框图。
图23是表示第二多普勒检验处理的流程的流程图。
具体实施方式
下面,参照附图对本发明的优选实施方式的一个例子进行说明。但是,可适用本发明的实施方式并不限定于此。
1.系统构成
图1是表示本实施方式中的定位系统1的概略构成的图。定位系统1包括作为一种具备定位装置的电子设备的便携式电话机2、便携式电话机的基站3及多个GPS卫星SV(SV1、SV2、SV3、SV4、...)。
便携式电话机2是用户用于进行通话、发送接收电子邮件等的电子设备,通过与基站3进行基站通信,除发挥通话、发送接收电子邮件等作为便携式电话机的本来的功能以外,还实现基于从GPS卫星SV接收到的GPS卫星信号进行定位的定位功能。
便携式电话机2在初次定位时、或从上次定位时开始经过长时间的情况下,向基站3请求便携式电话机2的预测位置。而且,从基站3取得预测位置和上述预测位置的可靠度(预测位置距离便携式电话机2的真实位置最多离开多少),并根据后述的原理确定进行定位运算时的初始位置。而且,通过利用已确定的初始位置进行定位运算,计测出便携式电话机2的位置。
基站3是便携式电话机的服务运营商所设置的无线基站,通过向便携式电话机2发送基站信号并与便携式电话机2之间进行基站通信,可以使便携式电话机2发挥通话、发送接收电子邮件等功能。基站3接受便携式电话机2的请求,计算出便携式电话机2的预测位置和该预测位置的可靠度,并提供给作为请求方的便携式电话机2。另外,关于预测位置及其可靠度的计算方法由于可以适用公知的方法,所以省略详细的说明。
2.原理
图2至图4是用于说明本实施方式中的确定初始位置的原理的图。
初始位置除用于便携式电话机2进行定位运算(更详细地说是位置收敛运算)之外,还用于判定作为捕捉对象的卫星(以下,称为“捕捉对象卫星”)、或计算便携式电话机2与捕捉对象卫星间的几何学的距离。因此,有必要将初始位置确定为接近便携式电话机2的真实位置的位置。
当从基站3取得的预测位置具有距离便携式电话机2的真实位置在±150km以内的精度时,可以认为在以所取得的预测位置为中心的方圆(四方)300km的位置范围内包含有便携式电话机2的所在地。因此,能够在至少小于等于300km的误差范围中求得接近便携式电话机2的真实位置的初始位置。
详细地进行说明,则如图2所示,将以预测位置(在图中以黑圆点示出。)为中心、且高度与预测位置为相同高度的二维的规定区域(以下,在本实施方式中,称为“框架”)假想地配置在地球上。而且,在该框架内诸如以50km间隔格子状地配设被称为网格的候补位置。另外,在这里,虽然对配置二维的框架以使网格的高度为全部相同的情况进行说明,但也可以配置三维的框架以使网格的高度为该网格的地表面的高度。
而且,分别对各个网格,按照下面公式(1),根据位置坐标求得该网格和捕捉对象卫星之间的距离。将根据位置坐标求得的该网格和捕捉对象卫星之间的距离称为“几何学距离”。
公式1:
但是,“GR”表示几何学距离,下标的“i”表示捕捉对象卫星的编号。此外,(Xi、Yi、Zi)是捕捉对象卫星的位置坐标,(x、y、z)是网格的位置坐标。
此外,从GPS卫星SV输出的GPS卫星信号由PRN码通过直接频谱扩散方式调制,其中,该PRN码是对应于每个卫星而不同的扩散编码的一种。这时,能够通过进行在装置内部产生的复制码和PRN码的相关处理,检测出PRN码的相位(以下,称为“码相位”)。根据该码相位能够计算出便携式电话机2和捕捉对象卫星间的伪距(PR)。
而且,分别对各个网格,将该网格作为临时初始位置,利用伪距“PR”和几何学距离“GR”之差“δR=PR-GR”进行位置收敛运算。作为收敛运算,可以用诸如逐次近似法(牛顿-拉夫逊法),并将解收敛的网格确定为定位运算用的初始位置。
当从基站3供给的预测位置的精度为小于等于±150km时,设想如上所述那样的方圆300km的一个框架,可以通过分别对在该框架内的各个网格进行位置收敛运算,从而确定初始位置。不过,当预测位置的精度超过±150km时,便携式电话机2的所在地未必包含在以所供给的预测位置为中心的方圆300km的框架内。因此,需要扩大初始位置的搜索范围。
例如,如图3所示,当从基站3供给了诸如精度±500km的预测位置时,在设定以所供给的预测位置(在图中以黑圆点示出)为中心的框架F 1的同时,在其周围设定8个框架F2~F9,从而形成方圆1000km的区域。而且,通过将框架F 1~F9所包含的所有的网格作为对象进行位置收敛运算,从而确定初始位置。
不过,在图3的例子中,由于一个框架包含有7×7=49个网格,所以在9个框架中存在有49×9=441个网格,将这些所有的网格作为对象进行位置收敛运算,则存在有计算量变庞大的问题。此外,由于扩大了初始位置的搜索范围,所以根据位置收敛运算观测到多个收敛点,进而存在有难以选定作为初始位置的网格的情况。
为了解决这些问题,在本实施方式中,使用归纳的残差APR(以下,称为“APR值”)来进行网格的限定。而且,通过只将限定出的网格作为对象进行位置收敛运算,在削减计算量的同时,防止了根据位置收敛运算观测有多个收敛点的情况。
这里,按照下面的公式(2)计算出APR值。
公式2:
但是,“N”是捕捉对象卫星的个数。APR值作为各个捕捉对象卫星各自的伪距“PR”和几何学距离“GR”之差“δR”的平方和而被供给。
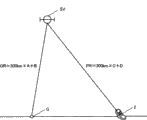
图4是用于对本实施方式中的初始位置的确定及定位的次序进行说明的图。PRN码是1.023Mbps位率、1023bit(=1msec=300km)的位长的信号。GPS卫星SV和网格间的距离(几何学距离)可以表示为作为PRN码的反复周期的1ms对应的波长、即300km的整数倍加上尾数部分的长度。例如,在图4中,网格G和卫星SV之间的几何学距离可以表示为“GR=300km×A+B”。同样,便携式电话机2和卫星SV间的伪距也可以表示为“PR=300km×C+D”。
在本实施方式中,首先,分别对各个网格(第三候补位置)计算出几何学距离“GR”,并计算出其尾数部分(第一距离)。此外,计算出已观测到的伪距“PR”的尾数部分(第二距离)。而且,用伪距“PR”的尾数部分“D”和几何学距离“GR”的尾数部分“B”之差计算出APR值,并按APR值从小到大的顺序选择N个网格,从而限定至N个网格(第一候补位置)。另外,在这里,限定的网格个数“N”优选“5~20个”左右。
接着,分别将所限定的N个网格(第一候补位置)作为候补初始位置,通过进行以反复次数为m次的位置收敛运算,从而进一步限定至M个网格(第二候补位置)。在这种情况下的位置收敛运算的反复次数“m”优选为“2~3次”左右。在N个网格中,通过m次的位置收敛运算而解收敛的网格大致为“2~3个”。在这里,将所限定的网格个数设为M个。
而且,对所限定的M个网格(第二候补位置)分别用几何学距离(第三距离)“GR”和伪距(第四距离)“PR”,计算出APR值。而且,将计算出的APR值为最小的网格选择、确定为初始位置。在此之后,用所确定的初始位置进行以反复次数为n次的位置收敛运算,求得便携式电话机2的定位位置。优选在这种情况下的位置收敛运算的反复次数“n”为“6~10次”左右。
本发明实施方式的一个大的特征是首先从存在有多个的网格中,用几何学距离的尾数部分及伪距的尾数部分将网格限定至5~20个左右,之后,进行反复次数少的(计算量少的)位置收敛运算,进一步将网格限定至2~3个。这样,无需对数量庞大的网格分别进行完全的位置收敛运算,即可以通过较少的计算量选定作为初始位置的网格。
3.功能构成
图5是表示在本实施方式中的便携式电话机2的功能构成的框图。便携式电话机2包括GPS天线10、GPS接收部20、TCXO(Temperature Compensated Crystal Oscillator:温度补偿晶体振荡器)40、主机CPU(Central Processing Unit:中央处理器)50、操作部60、显示部70、便携式电话机用天线80、便携式电话机用无线通信电路部90、ROM(Read Only Memory:只读存储器)100、闪存ROM 110、及RAM(Random Access Memory:随机存取存储器)120。
GPS天线10是接收包含从GPS卫星发送的GPS卫星信号的RF(Radio Frequency:无线电频率)信号的天线,并将所接收的信号输出给GPS接收部20。
GPS接收部20是基于从GPS天线10输出的信号对便携式电话机2的当前位置进行定位的定位电路,是相当于所谓GPS接收机的功能块。GPS接收部20包括RF(Radio Frequency)接收电路部21和基带处理电路部30。另外,RF接收电路部21和基带处理电路部30既可以作为不同的LSI(Large Scale Integration:大规模集成电路)分别进行制造,又可以作为一个芯片(chip)进行制造。
RF接收电路部21是RF信号的处理电路块,通过将由TCXO 40生成的振荡信号分频或倍增,生成RF信号乘法用的振荡信号。而且,通过将生成的振荡信号与从GPS天线10输出的RF信号相乘,从而将RF信号降频转换成中频信号(以下,称为“IF(IntermediateFrequency:中间频率)信号”)。而且,在放大IF信号等之后,通过A/D(Analog Digital:模拟-数字)转换器转换成数字信号,向基带处理电路部30输出。
基带处理电路部30是对从RF接收电路部21输出的IF信号进行相关处理等从而捕捉、抽取GPS卫星信号,并解码数据取出导航信息、时刻信息等进行定位运算的电路部。基带处理电路部30包括运算控制部31、ROM 35及RAM 37。此外,运算控制部31包括测量(measurement)取得运算部33。
测量取得运算部33是根据从RF接收电路部21输出的接收信号(IF信号)进行GPS卫星信号的捕捉、跟踪的电路部,并具有相关运算部331。测量取得运算部33取得捕捉、跟踪到的GPS卫星信号的多普勒频率、码相位等的信息作为测量实测值,输出给主机CPU 50。
相关运算部331进行相关运算处理,捕捉GPS卫星信号,其中,该相关运算处理是利用例如FFT(Fast Fourier Transform:快速傅里叶变换)运算计算并累计(積算)接收信号所包含的PRN码和复制码的相关的处理。复制码就是模拟仿真产生的将要捕捉的GPS卫星信号所包含的PRN码的信号。
如将要捕捉的GPS卫星信号没有错误,则其GPS卫星信号所包含的PRN码和复制码一致(捕捉成功),如错误则不一致(捕捉失败)。因此,能够通过判定计算出的累计相关值的峰值,判定GPS卫星信号的捕捉是否成功,并通过连续不断地变更复制码进行与相同接收信号的相关运算,可以捕捉GPS卫星信号。
此外,相关运算部331一边变更复制码的发生信号的频率及复制码的相位,一边进行上述的相关运算处理。当复制码的发生信号的频率和接收信号的频率一致且复制码的相位和接收信号所包含的PRN码的相位一致时,累计相关值成为最大。
更具体地说,设定对应于捕捉对象的GPS卫星信号的规定的频率及相位的范围,作为搜索(search)范围。而且,在该搜索范围内,进行用于检测PRN码的开始位置(码相位)的相位方向的相关运算和用于检测频率的频率方向的相关运算。搜索范围被规定为频率在以GPS卫星信号的载波频率、即1.57542“GHz”为中心的规定的频率扫描范围,相位在PRN码的码片长、即1023个码片的码相位范围内。
TCXO 40是以规定的振荡频率生成振荡信号的温度补偿型晶体振荡器,并将生成的振荡信号输出给RF接收电路部21及基带处理电路部30。
主机CPU 50是按照ROM 100所存储的系统程序等的各种程序,统括地控制便携式电话机2的各部的处理器。主机CPU 50使通过进行定位处理求出的输出位置显示在显示部70上。
操作部60是由诸如触摸面板或按钮开关等构成的输入装置,用于将被按下的键或按钮的信号输出给主机CPU 50。根据操作该操作部60,输入通话请求、发送接收电子邮件请求等的各种指令。
显示部70由LCD(Liquid Crystal Display:液晶显示器)等构成,是基于从主机CPU 50输入的显示信号进行各种显示的显示装置。显示部70显示有导航画面、时刻信息等。
便携式电话机用天线80是在与便携式电话机2的通信服务运营商所设置的无线基站之间进行发送接收便携式电话机用无线信号的天线。
便携式电话机用无线通信电路部90是由RF转换电路、基带处理电路等构成的便携式电话机的通信电路部,通过进行便携式电话机用无线信号的调制、解调等,实现通话、发送接收电子邮件等。
ROM 100存储主机CPU 50用于控制便携式电话机2的系统程序、及用于实现导航功能的各种程序、数据等。
闪存ROM 110是可读写的非易失性的存储装置,并与ROM100同样,存储主机CPU 50用于控制便携式电话机2的各种程序、数据等。闪存ROM 110所存储的数据即使切断便携式电话机2的电源也不丢失。
RAM 120形成暂时地存储通过主机CPU 50执行的系统程序、各种处理程序、各种处理的处理中数据及处理结果等的工作区。
4.数据构成
图6是表示一例ROM 100所存储的数据的图。ROM 100存储有通过主机CPU 50读出并作为主处理(参照图13)执行的主程序101、及初始位置可靠度设定数据103。
此外,主程序101作为子程序包含有作为定位处理(参照图14及图15)执行的定位程序1011、作为扩张网格搜索处理(参照图16)执行的扩张网格搜索程序1012、作为第一APR值计算处理(参照图17)执行的第一APR值计算程序1013、作为第二APR值计算处理(参照图18)执行的第二APR值计算程序1014、作为多普勒检验处理(参照图19)执行的多普勒检验程序1015、作为第一定位运算处理执行的第一定位运算程序1016、及作为第二定位运算处理执行的第二定位运算程序1017。对这些的处理将在后面采用流程图详细地进行描述。
图9是表示一例初始位置可靠度设定数据103的数据构成的图。初始位置可靠度设定数据103对应存储有多普勒残差幅度1031和初始位置可靠度1033。例如,多普勒残差幅度1031在“20~60Hz”时的初始位置可靠度1033是“100km”。
多普勒残差幅度1031是分别对各个捕捉对象卫星用暂定的初始位置(以下,称为“暂定初始位置”)计算出的理论上的多普勒频率和由测量取得运算部33运算出的多普勒频率之差(以下,称为“多普勒残差”)的幅度。更具体地说,从对各个捕捉对象卫星计算出的多普勒残差中的最大值减去最小值的值是多普勒残差幅度1031。
初始位置可靠度1033是表示初始位置111的可靠度程度的指标值,表示为初始位置111所包含的误差的大小。例如,在初始位置可靠度1033为“100km”时,则意味着在初始位置111中包含有“100km”的误差。
图7是表示一例闪存ROM 110所存储的数据的图。在闪存ROM 110中存储有初始位置111、初始位置可靠度112、及卫星轨道数据113。
初始位置111是在定位运算中所使用的便携式电话机2的初始位置。在初次定位时、或从上次定位时开始经过大于等于规定时间时,主机CPU 50与基站3进行通信取得便携式电话机2的预测位置,并作为初始位置111更新存储到闪存ROM 110中。
初始位置可靠度112是表示初始位置111的可靠度程度的指标值,与图9的初始位置可靠度1033对应。主机CPU 50从基站3取得预测位置的可靠度,并作为初始位置可靠度112更新存储到闪存ROM 110中。
卫星轨道数据113是存储有诸如概略星历、精密星历等的各个GPS卫星SV的卫星轨道的数据。卫星轨道数据113诸如可以通过对由基带处理电路部30捕捉到的GPS卫星信号进行解码来取得。
图8是表示一例RAM 120所存储的数据的图。在RAM 120中存储有测量数据121、框架配置数据122、网格数据123、候补初始位置数据124、暂定初始位置125、候补输出位置126、及输出位置127。
图10是表示一例测量数据121的数据构成的图。在测量数据121中分别对各个捕捉对象卫星1211存储有由码相位及多普勒频率组成的测量实测值1213。主机CPU 50从测量取得运算部33中取得测量实测值1213,并与捕捉对象卫星1211对应存储在测量数据121中。
框架配置数据122是关于诸如图3的框架F1~F9那样的各个框架的配置的数据,例如,在其中包含有框架的坐标值。
图11是表示一例网格数据123的数据构成的图。网格数据123是关于所有框架的所有网格的数据,对应存储有框架的编号1231、该框架所包含的网格的编号1233、该网格所包含的网格的位置坐标1235、及对该网格计算出的第一APR值1237。
图12是表示一例候补初始位置数据124的数据构成的图。候补初始位置数据124是关于作为候补初始位置而选出的网格的数据,对应存储有框架的编号1241、网格的编号1243、该网格的位置坐标1245、及第二APR值1247。
暂定初始位置125是与从候补初始位置中作为暂定的初始位置而确定的网格对应的位置。候补输出位置126是通过第二定位运算处理作为输出位置的候补计算出的位置。此外,输出位置127是被确定为最终输出到显示部70中的位置。
5.处理的流程
图13是通过由CPU 50读出并执行ROM 100所存储的主程序101,从而在便携式电话机2中执行的主处理的流程的流程图。
主处理是主机CPU 50在检测出用户通过操作部60进行电源接通操作的情况下开始执行的处理。此外,虽然未特别说明,但在执行以下主处理的过程中,处于随时进行以下处理的状态,即基于GPS天线10的RF信号的接收、基于RF接收电路部21的RF信号的向IF信号的降频转换,进行基于基带处理部30的从IF信号捕捉、抽取GPS卫星信号、以及基于测量取得运算部33的测量实测值的运算。
首先,主机CPU 50判定通过操作部60进行的指示操作(步骤A1),并在判定指示操作为通话指示操作时(步骤A1:通话指示操作),进行通话处理(步骤A3)。具体地说,使便携式电话机用无线通信电路部90进行与基站3之间的基站通信,实现便携式电话机2与其他电话机之间的通话。
此外,当在步骤A1中判定指示操作为发送接收电子邮件指示操作时(步骤A1:电子邮件发送接收指示操作),主机CPU 50进行发送接收电子邮件处理(步骤A5)。具体地说,使便携式电话机用无线通信电路部90进行基站通信,实现便携式电话机2与其他电话机之间发送接收电子邮件。
此外,当在步骤A1中判定指示操作为定位指示操作时(步骤A1:定位指示操作),主机CPU 50通过读出并执行ROM 100所存储的定位程序1011,进行定位处理(步骤A7)。
图14及图15是表示定位处理的流程的流程图。
首先,主机CPU 50判定是否是初次定位或从上次定位开始经过了大于等于规定时间(步骤B1),当判定未满足该条件时(步骤B1:否),向步骤B5转移处理。此外,当判定满足该条件时(步骤B1:是),从通信基站取得便携式电话机2的预测位置及其可靠度,并作为初始位置111及初始位置可靠度112更新存储到闪存ROM110中(步骤B3)。
接着,主机CPU 50用闪存ROM 110所存储的初始位置111及卫星轨道数据113,进行捕捉对象卫星判定处理(步骤B5)。更详细地说,在用未图示的时钟部计时的当前时刻,根据卫星轨道数据113,判定位于初始位置111的天空的GPS卫星SV,作为捕捉对象卫星。
之后,主机CPU 50判定捕捉对象卫星数量是否大于等于4个(步骤B7),当判定为不足4个时(步骤B7:否),返回到步骤B5。
此外,在判定为大于等于4个时(步骤B7:是),主机CPU 50抽取捕捉对象卫星的组合(以下,称为“卫星组合”)(步骤B9)。例如,当捕捉对象卫星的数量为6个时,则抽取由4个卫星构成的组合(6C4=15个)、由5个卫星构成的组合(6C5=6个)、及由6个卫星构成的组合(6C6=1个)的合计22个的卫星组合。
接着,主机CPU 50对在步骤B9中抽取的各个卫星组合,执行循环A的处理(步骤B11~B45)。在循环A中,主机CPU 50判定闪存ROM 110所存储的初始位置可靠度112是否超过150km(步骤B13),当判定为小于等于150km时(步骤B13:否),转移向步骤B41进行处理。
此外,当判定初始位置可靠度112超过150km时(步骤B13:是),主机CPU 50通过读出并执行ROM 100所存储的扩张网格搜索程序1012,进行扩张网格搜索处理(步骤B15)。
图16是表示扩张网格搜索处理的流程的流程图。
首先,主机CPU 50判定通过测量取得运算部33运算出的测量实测值是否与上次定位时相同(步骤C1),当判定为不相同时(步骤C1:否),基于闪存ROM 110所存储的初始位置可靠度112确定框架数,将框架假想地配置在地球上(步骤C3)。
更具体地说,将闪存ROM 110所存储的初始位置111作为中心网格,配置与初始位置可靠度112对应数量的框架。例如,当初始位置可靠度112为“600km~1000km”的范围时,则如图3所示的那样将以初始位置111为中心的框架F1配置在中心,并在其周围配置F2~F9的8个框架。此外,在“300km~600km”的范围的情况下,则配置纵向2个×横向2个的4个框架,在“1000km~1300km”的情况下,则配置纵向4个×横向4个的16个框架。以后,范围每增加300km就要增加配置的框架数量。
接着,主机CPU 50对在步骤C3中配置的各个框架,执行循环C的处理(步骤C5~C11)。在循环C中,主机CPU 50计算出该框架的所有网格的位置坐标1235,并与该框架的编号1231及该网格的编号1233对应存储在RAM 120的网格数据123中(步骤C7)。
之后,主机CPU 50通过读出并执行ROM 100所存储的第一APR值计算程序1013,进行第一APR值计算处理(步骤C9)。
图17是表示第一APR值计算处理的流程的流程图。
首先,主机CPU 50对该框架的各个网格,执行循环D的处理(步骤D1~D27)。在循环D中,主机CPU 50复原(reset)RAM 120的网格数据123所存储的该网格的第一APR值1237(步骤D3)。
之后,主机CPU 50对各个捕捉对象卫星,执行循环E的处理(步骤D5~D23)。在循环E中,主机CPU 50将该捕捉对象卫星的编号代入“i”中(步骤D7)。而且,基于闪存ROM 110所存储的卫星轨道数据113,计算出该捕捉对象卫星的位置坐标(步骤D9)。
接着,主机CPU 50基于网格数据123所存储的该网格的位置坐标1235和在步骤D9中计算出的该捕捉对象卫星的位置坐标,计算出该网格和该捕捉对象卫星间的几何学距离“GR”(步骤D11)。
接着,主机CPU 50计算出已算出的几何学距离“GR”的小于等于300km的部分(尾数部分),作为第一尾数部分(步骤D13)。此外,主机CPU 50计算出相当于通过测量取得运算部33运算出的该捕捉对象卫星的码相位的长度,作为第二尾数部分(步骤D15)。
接着,主机CPU 50计算出在步骤D13中计算出的第一尾数部分和在步骤D15中计算出的第二尾数部分之差,作为Diff“i”(步骤D17)。而且,主机CPU 50从针对该捕捉对象卫星计算出的Diff“i”中减去针对第一个捕捉对象卫星计算出的Diff“1”,作为Diff_Temp“i”(步骤D19)。
接着,主机CPU 50将在步骤D19中计算出的Diff_Temp“i”的平方与当前的第一APR相加,更新第一APR值1237(步骤D21)。而且,主机CPU 50向下一个捕捉对象卫星转移处理。
在对所有的捕捉对象卫星进行步骤D7~D21的处理之后,主机CPU 50结束循环E的处理(步骤D23)。在结束循环E的处理之后,主机CPU 50将该网格的第一APR值1237存储在RAM 120的网格数据123中(步骤D25),并向下一个网格转移处理。
在对所有的网格进行步骤D3~D25的处理之后,主机CPU 50结束循环D的处理(步骤D27)。而且,主机CPU 50结束第一APR值计算处理。
返回到图16的扩张网格搜索处理,在进行第一APR值计算处理之后,主机CPU 50向下一个框架转移处理。在对所有的框架进行步骤C7及C9的处理之后,主机CPU 50结束循环C的处理(步骤C11)。
在结束循环C的处理之后,主机CPU 50按RAM 120的网格数据123所存储的第一APR值1237从小到大的顺序抽取“10个”的网格作为候补初始位置,并更新存储到RAM 120的候补初始位置数据124中(步骤C13)。而且,主机CPU 50结束扩张网格搜索处理。
另一方面,在步骤C1中,在测量实测值与上次定位时相同的情况下(步骤C1:是),主机CPU 50结束扩张网格搜索处理。这是因为,如果测量实测值与上次定位时相同,则候补初始位置也与上次定位时相同,所以无需进行步骤C3~C13的处理。
返回到图14的定位处理,在进行扩张网格搜索处理之后,主机CPU 50计算出各个候补初始位置和各个捕捉对象卫星间的几何学距离(步骤B17)。而且,主机CPU 50对各个候补初始位置,执行循环B的处理(步骤B19~B29)。
在循环B中,主机CPU 50通过读出并执行ROM 100所存储的第一定位运算程序1016,进行第一定位运算处理(步骤B21)。具体地说,用在步骤B17中计算出的几何学距离和根据码相位计算出的伪距,进行基于最小二乘法的位置收敛运算。这时,将收敛运算的反复次数设为“2次”。
之后,主机CPU 50判定解是否收敛(步骤B23),当判定未收敛时(步骤B23:否),向下一个候补初始位置转移处理。此外,当判定为解已收敛时(步骤B23:是),通过读出并执行ROM 100所存储的第二APR值计算程序1014,进行第二APR值计算处理(步骤B25)。
图18是表示第二APR值计算处理的流程的流程图。
首先,主机CPU 50复原RAM 120的候补初始位置数据124所存储的该候补初始位置的第二APR值1247(步骤E1)。之后,主机CPU 50对各个捕捉对象卫星执行循环F的处理(步骤E3~E15)。
在循环F中,主机CPU 50将该捕捉对象卫星的编号代入“i”中(步骤E5)。而且,计算出利用该候补初始位置通过第一定位运算处理计算出的定位位置和该捕捉对象卫星间的几何学距离(步骤E7)。此外,主机CPU 50利用由测量取得运算部33运算出的该捕捉对象卫星的码相位,计算出便携式电话机2和该捕捉对象卫星间的伪距(步骤E9)。
接着,主机CPU 50计算出在步骤E7中计算出的几何学距离和在步骤E9中计算出的伪距之差,作为Diff“i”(步骤E11)。而且,主机CPU 50将计算出的Diff“i”的平方与当前的第二APR值相加,更新第二APR值(步骤E13)。而且,主机CPU 50向下一个捕捉对象卫星转移处理。
在对所有的捕捉对象卫星进行步骤E5~E13的处理之后,主机CPU 50结束循环F的处理(步骤E15)。在结束循环F的处理之后,主机CPU 50使该候补初始位置的第二APR值1247除以该卫星组合所包含的卫星数,更新第二APR值1247(步骤E17)。而且,主机CPU 50结束第二APR值计算处理。
返回到图15的定位处理,在进行第二APR值计算处理之后,主机CPU 50将该候补初始位置的第二APR值1247存储到RAM120的候补初始位置数据124中(步骤B27)。而且,主机CPU 50向下一个候补初始位置转移处理。
在对所有的候补初始位置进行步骤B21~B27的处理之后,主机CPU 50结束循环B的处理(步骤B29)。在结束循环B的处理之后,主机CPU 50选择RAM 120的候补初始位置数据124所存储的第二APR值1247最小的候补初始位置作为暂定初始位置125,更新存储到RAM 120中(步骤B31)。
之后,主机CPU 50通过读出并执行ROM 100所存储的多普勒检验程序1015,进行多普勒检验处理,并判定暂定初始位置125适当与否(步骤B33)。
图19是表示多普勒检验处理的流程的流程图。
首先,主机CPU 50对各个捕捉对象卫星,执行循环G的处理(步骤F1~F9)。在循环G中,主机CPU 50根据RAM 120所存储的暂定初始位置125和该捕捉对象卫星的卫星位置及闪存ROM110所存储的卫星轨道数据113计算出多普勒频率,作为第一多普勒频率(步骤F3)。
此外,主机CPU 50将由测量取得运算部33运算出的多普勒频率作为第二多普勒频率(步骤F5)。接着,主机CPU 50计算出第一多普勒频率和第二多普勒频率之差的绝对值,作为多普勒残差(步骤F7)。而且,主机CPU 50向下一个捕捉对象卫星转移处理。
在对所有的捕捉对象卫星进行步骤F3~F7的处理之后,主机CPU 50结束循环G的处理(步骤F9)。在结束循环G的处理之后,主机CPU 50计算出多普勒残差的最大值和最小值之差,作为多普勒残差幅度(步骤F11)。
接着,主机CPU 50判定在步骤F11中计算出的多普勒残差幅度是否为小于规定的阈值(步骤F13),当判定为小于阈值时(步骤F13:是),判定为多普勒检验OK(步骤F15)。此外,当判定为大于等于阈值时(步骤F13:否),判定为多普勒检验NG(步骤F17)。而且,主机CPU 50结束多普勒检验处理。
返回到图15的定位处理,在进行多普勒检验处理之后,主机CPU 50判定多普勒检验是否OK(步骤B35),当判定为多普勒检验NG时(步骤B35:否),向下一个卫星组合转移处理。
此外,当判定为多普勒检验OK时(步骤B35:是),主机CPU50将RAM 120所存储的暂定初始位置125作为初始位置111,更新存储到闪存ROM 110中(步骤B37)。
而且,主机CPU 50参照ROM 100所存储的初始位置可靠度设定数据103,读出与在步骤F11中计算出的多普勒残差幅度1031对应的初始位置可靠度1033,并作为初始位置可靠度112更新存储到闪存ROM 110中(步骤B39)。
接着,主机CPU 50通过读出并执行ROM 100所存储的第二定位运算程序1017,进行第二定位运算处理(步骤B41)。具体地说,用闪存ROM 110所存储的初始位置111与各个捕捉对象卫星之间的几何学距离和根据码相位计算的伪距,进行基于最小二乘法的位置收敛运算。这时,将收敛运算的反复次数设为“6次”。
而且,主机CPU 50将在第二定位运算处理中获得的定位位置作为候补输出位置126积累存储在RAM 120中(步骤B43),然后向下一个卫星组合转移处理。在对所有的卫星组合进行步骤B13~B43的处理之后,主机CPU 50结束循环A的处理(步骤B45)。
在结束循环A的处理之后,主机CPU 50从RAM 120所积累存储的候补输出位置126中确定输出位置127,存储在RAM 120中(步骤B47)。具体地说,诸如可以将捕捉对象卫星的信号强度的平均值最大的候补输出位置126或捕捉对象卫星的天空配置的指标值、即PDOP(Position Dilution Of Precision:位置精度衰减因子)值最小的候补输出位置126确定为输出位置127。
而且,主机CPU 50在使显示部70显示绘制有在步骤B47中确定的输出位置127的导航画面之后(步骤B49),结束定位处理。
返回到图13的主处理,在进行了步骤A3~A7的任一处理之后,主机CPU 50判定用户是否通过操作部60进行了电源切断指示操作(步骤A9),当判定未进行时(步骤A9:否),则返回步骤A1。此外,当判定已进行了电源切断指示操作时(步骤A9:是),结束主处理。
6.实验结果
图20是表示分别对现有的方法和本发明实施方式的方法计测TTFF(初次定位时间)及定位率时的实验结果的一个例子的图。在图20中,横轴表示GPS卫星信号的信号强度(dBm),纵轴表示TTFF(秒)及定位率(%)。定位率就是相对于尝试定位运算的试行次数的定位的成功次数。由于定位运算是收敛计算,所以当成功收敛时或当计算出的位置在距离真实位置能视为成功的误差范围内时,则判定为定位成功。
首先,当观察定位率时,在现有的方法中虽然在信号强度为“-141dBm”之前定位率为“100%”,但当信号强度变为小于“-141dBm”时,定位率变为“0%”。另一方面,在本发明实施方式的方法中,在信号强度为“-151dBm”之前定位率为“100%”。据此,可以清楚地得知,根据本发明实施方式的方法,即使在接收信号变为弱电场的信号的环境(弱电场环境)中,也可以进行定位。
接着,当观察TTFF时,本发明实施方式的方法与现有的方法相比,TTFF变短。此外,在信号强度为“-148dBm”之前,TTFF纳入在20秒以内,从此可以清楚地得知即使在弱电场环境中也以比较短的时间实现初始定点化。
7.作用效果
根据本实施方式,在地球上设定假想包含便携式电话机2的所在地的位置范围、且方圆至少300km以上的框架,并在该框架内格子状地配设多个网格(第三候补位置)。而且,分别对多个网格,计算出与GPS卫星之间的几何学距离的尾数部分(第一距离)和基于GPS卫星信号计算出的伪距的尾数部分(第二距离)之差,作为第一APR值,并从多个网格中按第一APR值从小到大的顺序选择N个网格(第一候补位置)。
之后,通过分别将已选择的N个网格(第一候补位置)作为临时初始位置进行基于GPS卫星信号的位置收敛运算,从N个网格中进一步选择M(<N)个网格(第二候补位置)。而且,分别对已选择的M个网格(第二候补位置),计算出与GPS卫星之间的几何学距离(第三距离)和基于GPS卫星信号计算出的伪距(第四距离)之差,作为第二APR值,并从M个网格中选择、确定第二APR值最小的网格作为定位运算用初始位置。
如果根据网格与捕捉对象卫星的物理位置关系计算出的距离和基于GPS卫星信号计算出的伪距之差较小,则该网格接近便携式电话机2的所在地的可能性高。因此,通过按距离差从小到大的顺序选择N个网格,可以在位置收敛运算的前阶段有效地限定网格。此外,通过这样,由于不需要对所有的网格进行位置收敛运算,所以能够大幅度地削减计算量。
此外,通过判定对限定为N个的网格进行位置收敛运算的结果,其解是否收敛,可将N个的网格进一步限定至M个。在该M个网格中包含有最接近便携式电话机2的真实位置的网格的可能性高,且通过从其中选择与捕捉对象卫星之间的几何学距离和基于GPS卫星信号计算出的伪距之差最小的网格,可获得接近便携式电话机2的真实位置的初始位置。
此外,根据本实施方式,即使从基站3供给有可靠度超过±150km的预测位置时,通过设定个数对应于可靠度的框架来限定网格,即使理论上位置误差为大于等于±1000km,也可以快速且适当地确定初始位置。
8.变形例
8-1.电子设备
在上述的实施方式中,作为具有定位装置的电子设备,虽然以便携式电话机为例进行了说明,但也可以是笔记本式电脑或PDA(Personal Digital Assistant:个人数字助理)、汽车导航装置等。
8-2.卫星定位系统
此外,在上述的实施方式中,作为卫星定位系统,虽然以GPS列举为例进行了说明,但也可以是WAAS(Wide Area AugmentationSystem:广域增强系统)、QZSS(Quasi Zenith Satellite System:准天顶卫星系统)、GLONASS(GLObal NAvigation Satellite System:全球导航卫星系统)、及GALILEO等的其他的卫星定位系统。
8-3.处理的分化
基带处理电路部30的运算控制部31也可以进行主机CPU 50所进行的处理的一部分或全部。例如,在上述的实施方式中,虽然对主机CPU 50执行网格的限定、定位运算(位置收敛运算)的情况进行了说明,但是当然也可以将运算控制部31作为执行这些处理的构成。
8-4.暂定初始位置的适当与否判定
在上述的实施方式中,虽然对进行多普勒检验处理并判定暂定初始位置的适当与否的情况进行了说明,但也可以不进行多普勒检验处理,而简易地判定暂定初始位置的适当与否。参照图21对此时的处理进行说明。具体地说,执行将图14~图15记载的定位处理的步骤B33及B35和步骤B39分别替换成图21的步骤G35和步骤G39的第二定位处理就可以。图21是示出在第二定位处理中的相当于图15的定位处理的部分的流程图。
在第二定位处理中,在步骤B31中确定暂定初始位置之后,主机CPU 50判定已确定的暂定初始位置是否与上次定位时的暂定初始位置一致(步骤G35)。而且,当判定为不一致时(步骤G35:否),向下一个卫星组合转移处理。
此外,当判定为一致时(步骤G35:是),主机CPU 50将在步骤B31中已确定的暂定初始位置作为初始位置,更新存储到闪存ROM 110中(步骤B37)。也就是说,当连续获得有相同暂定初始位置时,判定该暂定初始位置为适当。
而且,主机CPU 50基于该卫星组合所包含的捕捉对象卫星数,确定初始位置可靠度,更新存储到闪存ROM 110中(步骤G39)。具体地说,例如,当该卫星组合所包含的捕捉对象卫星数为大于等于6个时,将初始位置可靠度设为50km,当捕捉对象卫星数为5个时,将初始位置可靠度设为100km。此外,当捕捉对象卫星数为4个时,将初始位置可靠度设为150km。也就是说,捕捉对象卫星数越多,初始位置可靠度设定得越高。
8-5.输出位置
在上述的实施方式中,虽然对在确定初始位置后,进行利用该初始位置的第二定位运算处理并确定输出位置的情况进行了说明,但也可以不进行第二定位运算处理,而将初始位置确定为输出位置。这是因为,能够通过按照上述的原理限定网格,获得接近定位装置的真实位置的初始位置。
8-6.网格的限定
在上述的实施方式中,虽然对关于所有的网格利用几何学距离的尾数部分和伪距的尾数部分之差,计算出第一APR值的情况进行了说明,但也可以不利用尾数部分,而利用整体几何学距离和整体伪距之差计算出第一APR值,来进行网格的限定。
此外,也可以不用距离的差计算出APR值,而用多普勒频率的差计算出APR值,来进行网格的限定。也就是说,分别对各个捕捉对象卫星计算出理论性地计算出的多普勒频率和实际计测的多普勒频率之差,并计算出这些的平方和来求得APR值。而且,通过按已求得的APR值从小到大的顺序抽取网格,从而限定网格。
8-7.框架及网格
在上述的实施方式中,虽然对方圆300km的框架以50km间隔格子状地配设网格的情况进行了说明,但网格的配设间隔可以适当变更设定。网格配设间隔越窄越能够获得更接近真实位置的初始位置,但对应其计算量增加。
此外,框架的形状未必需要为矩形,诸如也可以为圆形。同样,对网格的配设形状也不必为格子状,诸如也可以为同心圆状或螺旋状。
8-8.卫星组合
在上述的实施方式中,虽然在图14及图15的定位处理中对在步骤B9中抽取的所有卫星组合进行步骤B11~B45的处理进行了说明,但也可以只对在步骤B9抽取的卫星组合中的例如PDOP值小于等于规定的阈值的卫星组合或捕捉到的GPS卫星信号的信号强度的平均值大于等于规定的阈值的卫星组合,进行步骤B11~B45的处理。通过这样,可以削减计算量。
8-9.加进终端的移动速度及移动方向的多普勒频率的计算
多普勒检验处理中的多普勒频率的计算也可以如下所述。也就是说,如图22所示,在便携式电话机2的构成元件中添加检测在正交3轴的传感器坐标系(以下,称为“传感器坐标系”)中的便携式电话机2的移动速度的速度传感器130、及检测便携式电话机2的移动方向的方位传感器140。
而且,便携式电话机2的主机CPU 50进行图23所示的第二多普勒检验处理代替图19的多普勒检验处理。在第二多普勒检验处理中,主机CPU 50用从速度传感器130及方位传感器140取得的移动速度及移动方向,计算出在ECEF(Earth Centered Earth Fixed:地球为中心的地球固定)坐标系中的便携式电话机2的移动速度矢量(以下,称为“终端移动速度矢量”)(步骤G1、G2)。在ECEF坐标系中的移动速度矢量能够通过对由速度传感器130检测出的移动速度及由方位传感器140检测出的移动方向进行公知的坐标变换运算(矩阵运算)求得。
而且,主机CPU 50在对各个捕捉对象卫星进行的循环H的处理(步骤G3~G9)中,用卫星轨道数据113所包含的卫星轨道信息,计算出在ECEF坐标系中的该捕捉对象卫星的卫星位置及卫星移动速度矢量(步骤G4)。而且,用暂定初始位置125、在步骤G2中计算出的终端移动速度矢量、在步骤G4中计算出的卫星位置及卫星移动速度矢量计算出多普勒频率,作为第一多普勒频率(步骤G5)。
当从移动速度的次元来考虑时,多普勒频率作为终端和GPS卫星的相对移动速度矢量的朝向视线方向(从终端位置向卫星位置的方向)的射影来表示。因此,用终端移动速度矢量和卫星移动速度矢量计算出相对移动速度矢量,并通过用暂定初始位置和卫星位置计算出视线方向,从而计算出多普勒频率。通过这样,可以计算出不但考虑到GPS 星的移动,也考虑到终端的移动的更准确的多普勒频率,能够提高判定暂定初始位置的适当与否的准确性。
附图标记说明
1定位系统 2便携式电话机
3基站 10GPS天线
20GPS接收部 21RF接收电路部
30基带处理电路部 31运算控制部
33测量取得运算部 35ROM
37RAM 40TCXO
50主机CPU 60操作部
70显示部 80便携式电话机用天线
90便携式电话机用无线通信电路部
100ROM 110闪存ROM
120RAM 130速度传感器
140方位传感器
Claims (6)
1.一种初始位置确定方法,用于确定基于来自定位用卫星的卫星信号进行定位运算时的初始位置,所述初始位置确定方法包括:
对设定在方圆至少300km以上的规定范围中的各第三候补位置,基于利用该第三候补位置及所述定位用卫星的位置计算出的第一距离和基于所述卫星信号计算出的第二距离之差,从所述第三候补位置中选择多个第一候补位置,其中,所述第一距离为几何学的距离的尾数部分;所述第二距离为伪距的尾数部分;
分别将所述多个第一候补位置作为候补初始位置,进行基于所述卫星信号的位置收敛运算;
基于所述位置收敛运算的运算结果,从所述多个第一候补位置中选择第二候补位置;以及
基于利用所述第二候补位置及所述定位用卫星的位置计算出的第三距离和基于所述卫星信号计算出的第四距离之差,从所述第二候补位置中选择所述初始位置,其中所述第三距离为几何学的距离;所述第四距离为伪距离。
2.根据权利要求1所述的初始位置确定方法,其中,
所述第三候补位置格子状地配设在所述规定范围中。
3.根据权利要求1至2中的任一项所述的初始位置确定方法,包括:
基于利用所述初始位置和所述定位用卫星的位置及轨道计算出的第一多普勒频率和基于所述卫星信号计算出的第二多普勒频率之差,判定所述初始位置的适当与否。
4.根据权利要求3所述的初始位置确定方法,其中,
判定所述初始位置的适当与否包括利用所述初始位置及定位装置的移动速度矢量和根据所述定位用卫星的轨道求得的所述定位用卫星的位置及移动速度矢量,计算出所述第一多普勒频率。
5.一种定位方法,其中,利用根据权利要求1至4中的任一项所述的初始位置确定方法确定的初始位置,基于所述卫星信号进行定位运算。
6.一种定位装置,用于基于来自定位用卫星的卫星信号进行定位运算,所述定位装置包括:
第一候补位置选择部,对设定在方圆至少300km以上的规定范围中的各第三候补位置,基于利用该第三候补位置及所述定位用卫星的位置计算出的第一距离和基于所述卫星信号计算出的第二距离之差,从所述第三候补位置中选择多个第一候补位置,其中,所述第一距离为几何学的距离的尾数部分;所述第二距离为伪距的尾数部分;
位置收敛运算部,分别将所述多个第一候补位置作为候补初始位置,进行基于所述卫星信号的位置收敛运算;
第二候补位置选择部,基于所述位置收敛运算的运算结果,从所述多个第一候补位置中选择第二候补位置;
初始位置选择部,基于利用所述第二候补位置及所述定位用卫星的位置计算出的第三距离和基于所述卫星信号计算出的第四距离之差,从所述第二候补位置中选择所述初始位置,其中所述第三距离为几何学的距离;所述第四距离为伪距离;以及
定位部,利用所述已选择的初始位置,基于所述卫星信号进行定位运算。
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2008-211481 | 2008-08-20 | ||
| JP2008211481 | 2008-08-20 | ||
| JP2009-171887 | 2009-07-23 | ||
| JP2009171887A JP2010071977A (ja) | 2008-08-20 | 2009-07-23 | 初期位置決定方法、測位方法及び測位装置 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| CN101799529A CN101799529A (zh) | 2010-08-11 |
| CN101799529B true CN101799529B (zh) | 2013-09-11 |
Family
ID=42203885
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| CN200910166191.8A Expired - Fee Related CN101799529B (zh) | 2008-08-20 | 2009-08-20 | 初始位置确定方法、定位方法及定位装置 |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US8373592B2 (zh) |
| JP (1) | JP2010071977A (zh) |
| CN (1) | CN101799529B (zh) |
Families Citing this family (27)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2010203959A (ja) * | 2009-03-04 | 2010-09-16 | Seiko Epson Corp | 初期位置決定方法、位置算出方法及び位置算出装置 |
| US8339311B2 (en) | 2009-07-24 | 2012-12-25 | Broadcom Corporation | Method and system for a full GNSS capable multi-standard single chip |
| CN102645224B (zh) * | 2012-04-23 | 2014-10-08 | 北京空间飞行器总体设计部 | 一种基于星间伪距极值的编队星座构型维持控制方法 |
| US10257728B2 (en) | 2013-03-15 | 2019-04-09 | DGS Global Systems, Inc. | Systems, methods, and devices for electronic spectrum management |
| US10271233B2 (en) | 2013-03-15 | 2019-04-23 | DGS Global Systems, Inc. | Systems, methods, and devices for automatic signal detection with temporal feature extraction within a spectrum |
| US10237770B2 (en) | 2013-03-15 | 2019-03-19 | DGS Global Systems, Inc. | Systems, methods, and devices having databases and automated reports for electronic spectrum management |
| US11646918B2 (en) | 2013-03-15 | 2023-05-09 | Digital Global Systems, Inc. | Systems, methods, and devices for electronic spectrum management for identifying open space |
| US10231206B2 (en) | 2013-03-15 | 2019-03-12 | DGS Global Systems, Inc. | Systems, methods, and devices for electronic spectrum management for identifying signal-emitting devices |
| US10299149B2 (en) | 2013-03-15 | 2019-05-21 | DGS Global Systems, Inc. | Systems, methods, and devices for electronic spectrum management |
| US8750156B1 (en) | 2013-03-15 | 2014-06-10 | DGS Global Systems, Inc. | Systems, methods, and devices for electronic spectrum management for identifying open space |
| US10244504B2 (en) * | 2013-03-15 | 2019-03-26 | DGS Global Systems, Inc. | Systems, methods, and devices for geolocation with deployable large scale arrays |
| US9078162B2 (en) | 2013-03-15 | 2015-07-07 | DGS Global Systems, Inc. | Systems, methods, and devices for electronic spectrum management |
| US10219163B2 (en) | 2013-03-15 | 2019-02-26 | DGS Global Systems, Inc. | Systems, methods, and devices for electronic spectrum management |
| US10257729B2 (en) | 2013-03-15 | 2019-04-09 | DGS Global Systems, Inc. | Systems, methods, and devices having databases for electronic spectrum management |
| US10257727B2 (en) | 2013-03-15 | 2019-04-09 | DGS Global Systems, Inc. | Systems methods, and devices having databases and automated reports for electronic spectrum management |
| JP6427985B2 (ja) * | 2013-08-29 | 2018-11-28 | セイコーエプソン株式会社 | 電子時計 |
| US10605920B2 (en) * | 2016-01-13 | 2020-03-31 | Ams Sensors Singapore Pte. Ltd. | Power savings through refresh control for distance sensing devices |
| US10459020B2 (en) | 2017-01-23 | 2019-10-29 | DGS Global Systems, Inc. | Systems, methods, and devices for automatic signal detection based on power distribution by frequency over time within a spectrum |
| US10498951B2 (en) | 2017-01-23 | 2019-12-03 | Digital Global Systems, Inc. | Systems, methods, and devices for unmanned vehicle detection |
| US10700794B2 (en) | 2017-01-23 | 2020-06-30 | Digital Global Systems, Inc. | Systems, methods, and devices for automatic signal detection based on power distribution by frequency over time within an electromagnetic spectrum |
| US10529241B2 (en) | 2017-01-23 | 2020-01-07 | Digital Global Systems, Inc. | Unmanned vehicle recognition and threat management |
| CN107402394B (zh) * | 2017-05-31 | 2020-02-07 | 中国电子科技集团公司第三十六研究所 | 一种星载测频定位误差源在轨标校方法和装置 |
| CN107340529B (zh) * | 2017-05-31 | 2020-02-07 | 中国电子科技集团公司第三十六研究所 | 一种星载测频定位方法、装置和系统 |
| EP3819592B1 (en) * | 2018-07-02 | 2024-04-10 | Sony Group Corporation | Positioning device, positioning method, and program |
| US10943461B2 (en) | 2018-08-24 | 2021-03-09 | Digital Global Systems, Inc. | Systems, methods, and devices for automatic signal detection based on power distribution by frequency over time |
| CN110595460B (zh) * | 2019-09-25 | 2021-03-19 | 支付宝(杭州)信息技术有限公司 | 一种定位方法、系统及设备 |
| CN111867053A (zh) * | 2020-05-07 | 2020-10-30 | 北京嘀嘀无限科技发展有限公司 | 一种定位方法和系统 |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6560536B1 (en) * | 1999-07-12 | 2003-05-06 | Eagle-Eye, Inc. | System and method for rapid telepositioning |
| CN1625697A (zh) * | 2002-05-17 | 2005-06-08 | 诺基亚有限公司 | 确定接收机的位置和/或定位系统的系统时间 |
| CN101185008A (zh) * | 2005-06-01 | 2008-05-21 | 全球定位有限公司 | 卫星定位系统中使用距变率量测确认位置的方法和装置 |
Family Cites Families (11)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3302404B2 (ja) * | 1992-07-09 | 2002-07-15 | 日本無線株式会社 | Gps受信機 |
| JPH06265626A (ja) * | 1993-03-12 | 1994-09-22 | Hitachi Ltd | 測位システムおよび測位方法 |
| US5488378A (en) * | 1993-12-28 | 1996-01-30 | Rockwell International Corporation | Method and apparatus for determining positions on the earth corresponding to an observed rate of change of satellite range |
| US5552794A (en) * | 1994-04-29 | 1996-09-03 | Rockwell International Corporation | Position estimation using satellite range rate measurements |
| US7196660B2 (en) * | 2000-11-17 | 2007-03-27 | Global Locate, Inc | Method and system for determining time in a satellite positioning system |
| US6670916B2 (en) * | 2002-02-19 | 2003-12-30 | Seiko Epson Corporation | Method and system for position calculation from calculated time |
| JP2004037392A (ja) * | 2002-07-05 | 2004-02-05 | Matsushita Electric Works Ltd | Gps測位装置 |
| JP2006071460A (ja) | 2004-09-02 | 2006-03-16 | Seiko Epson Corp | 測位装置、測位方法、測位装置の制御プログラム、測位装置の制御プログラムを記録したコンピュータ読み取り可能な記録媒体 |
| JP5070771B2 (ja) * | 2006-08-31 | 2012-11-14 | セイコーエプソン株式会社 | 測位装置及び制御方法 |
| US7864108B2 (en) * | 2007-02-15 | 2011-01-04 | Seiko Epson Corporation | Present position estimation method, positioning method, program, and mobile terminal |
| JP2010203959A (ja) * | 2009-03-04 | 2010-09-16 | Seiko Epson Corp | 初期位置決定方法、位置算出方法及び位置算出装置 |
-
2009
- 2009-07-23 JP JP2009171887A patent/JP2010071977A/ja not_active Withdrawn
- 2009-08-11 US US12/539,302 patent/US8373592B2/en active Active
- 2009-08-20 CN CN200910166191.8A patent/CN101799529B/zh not_active Expired - Fee Related
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6560536B1 (en) * | 1999-07-12 | 2003-05-06 | Eagle-Eye, Inc. | System and method for rapid telepositioning |
| CN1625697A (zh) * | 2002-05-17 | 2005-06-08 | 诺基亚有限公司 | 确定接收机的位置和/或定位系统的系统时间 |
| CN101185008A (zh) * | 2005-06-01 | 2008-05-21 | 全球定位有限公司 | 卫星定位系统中使用距变率量测确认位置的方法和装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| US8373592B2 (en) | 2013-02-12 |
| CN101799529A (zh) | 2010-08-11 |
| JP2010071977A (ja) | 2010-04-02 |
| US20100176988A1 (en) | 2010-07-15 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN101799529B (zh) | 初始位置确定方法、定位方法及定位装置 | |
| JP5186873B2 (ja) | 測位方法、プログラム、測位装置及び電子機器 | |
| JP5423036B2 (ja) | 位置算出方法及び位置算出装置 | |
| JP5034935B2 (ja) | 測位方法、プログラム、測位装置及び電子機器 | |
| US8570214B2 (en) | Position calculating method and position calculating device | |
| JP5186874B2 (ja) | 測位方法、プログラム、測位装置及び電子機器 | |
| CN101825716A (zh) | 初始位置确定方法、位置计算方法以及位置计算装置 | |
| JP5109706B2 (ja) | 測位方法及び測位装置 | |
| CN101520506A (zh) | 位置解算系统、位置解算装置、服务器以及位置解算方法 | |
| US8265124B2 (en) | Received signal determination method, positioning device, and electronic instrument | |
| JP5526492B2 (ja) | 擬似距離算出方法、測位方法、プログラム及び測位装置 | |
| JP2010175426A (ja) | 位置算出方法及び位置算出装置 | |
| JP5228433B2 (ja) | 測位方法、プログラム、測位装置及び電子機器 | |
| CN102590834A (zh) | 适当与否判定方法及适当与否判定装置 | |
| CN102478656A (zh) | 误相关判断方法以及误相关判断装置 | |
| CN102096076B (zh) | 捕捉频率确定方法及接收装置 | |
| CN102193096A (zh) | 信号捕获方法及信号捕获装置 | |
| CN102156276A (zh) | 卫星信号跟踪方法、位置计算方法及位置计算装置 | |
| JP2010060301A (ja) | 位置適否判定方法及び位置適否判定装置 | |
| CN102162853B (zh) | 接收信号累计方法和接收装置 | |
| JP2009103489A (ja) | 測位方法、プログラム、測位装置及び電子機器 | |
| US9716545B2 (en) | Integrated circuit for satellite signal reception | |
| US8761232B2 (en) | Bit change determination method and bit change determination device | |
| JP5494394B2 (ja) | 受信装置 | |
| CN116973960A (zh) | 基于伪距的定位方法、装置、终端、存储介质及程序产品 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| C06 | Publication | ||
| PB01 | Publication | ||
| C10 | Entry into substantive examination | ||
| SE01 | Entry into force of request for substantive examination | ||
| C14 | Grant of patent or utility model | ||
| GR01 | Patent grant | ||
| CF01 | Termination of patent right due to non-payment of annual fee | ||
| CF01 | Termination of patent right due to non-payment of annual fee |
Granted publication date: 20130911 Termination date: 20210820 |