BR112018007487B1 - Dispositivo para instalação minimalmente invasiva de um rastreador e/ ou de um registro fantasma ao osso de um paciente - Google Patents
Dispositivo para instalação minimalmente invasiva de um rastreador e/ ou de um registro fantasma ao osso de um paciente Download PDFInfo
- Publication number
- BR112018007487B1 BR112018007487B1 BR112018007487-0A BR112018007487A BR112018007487B1 BR 112018007487 B1 BR112018007487 B1 BR 112018007487B1 BR 112018007487 A BR112018007487 A BR 112018007487A BR 112018007487 B1 BR112018007487 B1 BR 112018007487B1
- Authority
- BR
- Brazil
- Prior art keywords
- base
- tracker
- bone
- phantom
- patient
- Prior art date
Links
Images








Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/39—Markers, e.g. radio-opaque or breast lesions markers
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/00234—Surgical instruments, devices or methods, e.g. tourniquets for minimally invasive surgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/56—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor
- A61B17/58—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor for osteosynthesis, e.g. bone plates, screws, setting implements or the like
- A61B17/68—Internal fixation devices, including fasteners and spinal fixators, even if a part thereof projects from the skin
- A61B17/70—Spinal positioners or stabilisers ; Bone stabilisers comprising fluid filler in an implant
- A61B17/7074—Tools specially adapted for spinal fixation operations other than for bone removal or filler handling
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/56—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor
- A61B17/58—Surgical instruments or methods for treatment of bones or joints; Devices specially adapted therefor for osteosynthesis, e.g. bone plates, screws, setting implements or the like
- A61B17/68—Internal fixation devices, including fasteners and spinal fixators, even if a part thereof projects from the skin
- A61B17/84—Fasteners therefor or fasteners being internal fixation devices
- A61B17/846—Nails or pins, i.e. anchors without movable parts, holding by friction only, with or without structured surface
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/90—Identification means for patients or instruments, e.g. tags
- A61B90/94—Identification means for patients or instruments, e.g. tags coded with symbols, e.g. text
- A61B90/96—Identification means for patients or instruments, e.g. tags coded with symbols, e.g. text using barcodes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00681—Aspects not otherwise provided for
- A61B2017/00707—Dummies, phantoms; Devices simulating patient or parts of patient
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00681—Aspects not otherwise provided for
- A61B2017/00725—Calibration or performance testing
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B2017/00831—Material properties
- A61B2017/00902—Material properties transparent or translucent
- A61B2017/00915—Material properties transparent or translucent for radioactive radiation
- A61B2017/0092—Material properties transparent or translucent for radioactive radiation for X-rays
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2051—Electromagnetic tracking systems
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2046—Tracking techniques
- A61B2034/2055—Optical tracking systems
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/20—Surgical navigation systems; Devices for tracking or guiding surgical instruments, e.g. for frameless stereotaxis
- A61B2034/2072—Reference field transducer attached to an instrument or patient
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/36—Image-producing devices or illumination devices not otherwise provided for
- A61B90/37—Surgical systems with images on a monitor during operation
- A61B2090/376—Surgical systems with images on a monitor during operation using X-rays, e.g. fluoroscopy
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/39—Markers, e.g. radio-opaque or breast lesions markers
- A61B2090/3904—Markers, e.g. radio-opaque or breast lesions markers specially adapted for marking specified tissue
- A61B2090/3916—Bone tissue
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/39—Markers, e.g. radio-opaque or breast lesions markers
- A61B2090/3937—Visible markers
- A61B2090/3945—Active visible markers, e.g. light emitting diodes
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/39—Markers, e.g. radio-opaque or breast lesions markers
- A61B2090/3966—Radiopaque markers visible in an X-ray image
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/39—Markers, e.g. radio-opaque or breast lesions markers
- A61B2090/3983—Reference marker arrangements for use with image guided surgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B90/00—Instruments, implements or accessories specially adapted for surgery or diagnosis and not covered by any of the groups A61B1/00 - A61B50/00, e.g. for luxation treatment or for protecting wound edges
- A61B90/39—Markers, e.g. radio-opaque or breast lesions markers
- A61B2090/3991—Markers, e.g. radio-opaque or breast lesions markers having specific anchoring means to fixate the marker to the tissue, e.g. hooks
Abstract
A invenção refere-se a um dispositivo para instalação minimamente invasiva de um rastreador (20) e/ ou de um registro fantasma (registration phantom) (30) ao osso de um paciente, compreendendo uma base (10) feita de um material substancialmente radiotransparente, caracterizado pelo fato de que a base (10) compreende: - uma superfície de suporte (11) destinada a ficar voltada para o osso, - uma pluralidade de orifícios de passagem não paralelos (14) para passar um respectivo pino percutâneo (2) através da base (10); - pelo menos uma ranhura (15) que se prolonga a partir de uma borda da base (10) em uma direção transversal aos orifícios de passagem (14), a dita ranhura (15) passando por toda a base (10) até a superfície de suporte (11) e sendo destinada a engatar um pino percutâneo (2) implantado no osso do paciente, de modo a permitir que a base (10) deslize ao longo do dito pino (2); e - um sistema de fixação reproduzível, para conectar o rastreador (20) e/ ou o registro fantasma (30) à base.
Description
[0001] A invenção refere-se a um dispositivo para instalação minimamente invasiva de um rastreador e/ ou de um registro fantasma (registration phantom) ao osso de um paciente.
[0002] Na cirurgia ortopédica e traumática, a fluoroscopia de raios- X é frequentemente empregada para orientar os procedimentos cirúrgicos onde os implantes são inseridos nas regiões ósseas e para monitorar a redução de fratura e corrigir as fraturas.
[0003] A fluoro-navegação é a aplicação da navegação em tempo real nas imagens fluoroscópicas adquiridas intraoperatoriamente para atingir os objetivos acima mencionados.
[0004] Em vista da realização de fluoro-navegação, as ferramentas utilizadas durante a intervenção cirúrgica são equipadas com um rastreador, por exemplo, um rastreador óptico ou eletromagnético, que é seguido por pelo menos uma câmera ou um sensor eletromagnético de um sistema de localização. Outro rastreador é montado no paciente e também é visto por uma câmera do sistema de localização.
[0005] O documento FR 2 941 364 descreve um aparelho para instalar um rastreador óptico a um paciente. O dito aparelho compreende um corpo radiotransparente substancialmente plano que compreende uma pluralidade de orifícios de passagem. Os pinos são passados através dos ditos orifícios para fixar percutaneamente o corpo ao osso de um paciente. O aparelho compreende ainda, integrante ao corpo, um elemento saliente destinado a receber um rastreador óptico.
[0006] No entanto, embora o elemento saliente esteja localizado em uma extremidade longitudinal do corpo para mantê-lo afastado da área de intervenção cirúrgica, a equipe médica deve cuidar para não bater no rastreador óptico e/ ou no elemento saliente durante a intervenção cirúrgica, o que poderia deslocar o aparelho e assim tornar os dados de navegação irrelevantes.
[0007] Em vista das ferramentas de navegação cirúrgica em relação às imagens adquiridas pelo dispositivo de imagem de raios X, é necessário conhecer a posição do detector de imagens de raios X em relação ao rastreador óptico fixado no paciente. Para esse fim, em sistemas convencionais, o dispositivo de imagem de raios X também é equipado com um rastreador óptico que é visto por pelo menos uma câmera do sistema de localização. No entanto, uma vez que pode haver uma grande distância entre o rastreador óptico do paciente e o rastreador óptico do sistema de imagem de raios X, existe o risco de que o campo de visão das câmeras do sistema de localização seja obstruído pela equipe médica durante a intervenção cirúrgica.
[0008] Um objetivo da invenção é fornecer um dispositivo para a instalação minimamente invasiva de um rastreador e/ ou de um registro fantasma no osso de um paciente, o que supera as desvantagens acima mencionadas dos instrumentos conhecidos. Em particular, o objetivo da invenção é projetar um dispositivo minimamente invasivo que permita fluoro-navegação.
[0009] A invenção refere-se a um dispositivo para instalação minimamente invasiva de um rastreador e/ ou de um registro fantasma ao osso de um paciente, compreendendo uma base feita de um material substancialmente radiotransparente, caracterizado pelo fato de que a base compreende: - uma superfície de suporte destinada a ficar voltada para o osso, - uma pluralidade de orifícios de passagem não paralelos (14) para passar um respectivo pino percutâneo através da base; - pelo menos uma ranhura que se prolonga a partir de uma borda da base em uma direção transversal aos orifícios de passagem, a dita ranhura passando por toda a base até a superfície de suporte e sendo destinada a engatar um pino percutâneo implantado no osso do paciente, de modo a permitir que a base deslize ao longo do dito pino; e - um sistema de fixação reproduzível, para conectar o rastreador e/ ou o registro fantasma à base.
[0010] De preferência, as respectivas orientações dos orifícios de passagem não paralelos (14) são arquitetadas de modo a evitar qualquer contato entre a base e a pele do paciente quando os pinos percutâneos, que passam através dos orifícios de passagem, são implantados no osso do paciente.
[0011] De acordo com uma forma de realização, pelo menos parte dos orifícios de passagem não paralelos estão dispostos ao longo de uma pluralidade de círculos concêntricos, de tal modo que os orifícios de passagem de um círculo convergem para um ponto comum que é diferente de um círculo para o outro.
[0012] De acordo com uma forma de realização, a base compreende uma porção central e duas asas compreendendo orifícios de passagem não paralelos que se estendem em ambos os lados da dita porção central.
[0013] O dispositivo pode ainda compreender uma pluralidade de pinos percutâneos configurados para passar através da pelo menos uma ranhura e dos orifícios de passagem não paralelos.
[0014] De preferência, os ditos pinos compreendem um ressalto localizado a uma distância da ponta destinada a ser implantada no osso de um paciente, o dito ressalto formando um ponto de contato (abutment) que impede o praticante de inserir o pino no osso a uma distância maior do que a dita distância.
[0015] Vantajosamente, o dispositivo compreende um sistema de fixação para fixar rigidamente cada um dos ditos pinos à base. O dito sistema de fixação pode compreender pelo menos um dos seguintes: uma seção roscada do pino que coopera com uma respectiva seção roscada do orifício de passagem; um elemento configurado para deslizar ao longo do pino, configurado para engatar de forma forçada a uma carcaça correspondente na base; um parafuso de pressão; um dispositivo de travamento (clamp); e um elemento de cunha.
[0016] De acordo com uma forma de realização, o sistema de fixação reproduzível está configurado de modo a proporcionar uma ou mais posições de montagem definidas para o rastreador em relação à base e uma posição única para o registro fantasma em relação à base.
[0017] De acordo com uma forma de realização, o dispositivo compreende uma pluralidade de bases com diferentes tamanhos e/ ou formas, um único rastreador e um único registro fantasma configurado para ser fixado de forma reproduzível a cada uma das ditas bases.
[0018]De acordo com uma forma de realização, o dispositivo compreende uma base única e uma pluralidade de rastreadores e de registros fantasmas configurados para serem fixados de forma reproduzível à dita base.
[0019] De acordo com uma outra forma de realização, o dispositivo compreende uma pluralidade de bases com diferentes tamanhos e/ ou formas e uma pluralidade de rastreadores e de registros fantasmas de diferentes tamanhos e/ ou formas, configurados para serem fixados de forma reproduzível a cada uma das ditas bases.
[0020] Outras características e vantagens da invenção serão evidentes a partir da descrição a seguir, com base nos desenhos anexos, em que:
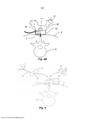
[0021] Figura 1 ilustra esquematicamente um instrumento modular, de acordo com uma forma de realização da invenção, em que a base é diretamente fixada ao osso do paciente;
[0022] Figura 2 ilustra esquematicamente um instrumento modular em que a base é indiretamente fixada ao osso do paciente;
[0023] Figura 3 ilustra esquematicamente um instrumento modular, de acordo com outra forma de realização da invenção, em que a base é fixada direta e indiretamente ao osso;
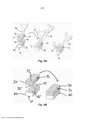
[0024] - Figuras 4A e 4B ilustram esquematicamente um instrumento modular, de acordo com as formas de realização da invenção, em que o rastreador é um rastreador eletromagnético;
[0025] Figura 5 ilustra esquematicamente um instrumento modular, de acordo com uma forma de realização da invenção, em que a base compreende uma fixação reproduzível comum ao rastreador e ao registro fantasma;
[0026] - Figuras 6A e 6B ilustram esquematicamente um instrumento modular, de acordo com uma forma de realização da invenção, em que o rastreador tem uma fixação reproduzível simétrica à base, enquanto que o registro fantasma possui uma fixação reproduzível única à base;
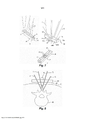
[0027] Figura 7 ilustra várias formas de realização de uma base, de acordo com a invenção, destinada a ser fixada ao osso por pinos;
[0028] Figura 8 ilustra esquematicamente uma base mantida a uma certa distância da pele usando uma pluralidade de pinos, criando uma fixação de múltiplas restrições;
[0029] Figura 9 ilustra esquematicamente várias maneiras de fixar os pinos à base;
[0030] Figura 10 ilustra várias formas de realização do registro fantasma;
[0031] Figura 11 ilustra esquematicamente uma forma de realização do registro fantasma e do rastreador fixados à base;
[0032] Figura 12 é um fluxograma que representa um protocolo que pode ser implementado durante uma intervenção cirúrgica usando um instrumento;
[0033] Figura 13 é um fluxograma que representa um protocolo alternativo que pode ser implementado no caso de uma fixação simétrica do rastreador em relação à base;
[0034] Figura 14 ilustra um cartão de identificação que compreende um código de barras contendo as características de referência da base;
[0035] Figura 15 ilustra cartões de identificação que compreendem uma matriz de dados contendo as características de referência da base, do registro fantasma, do rastreador e da ferramenta.
[0036] A invenção é realizada em um contexto de fluoro- navegação, isto é, de modo a navegar uma ferramenta rastreada por um sistema de localização em uma imagem de raio X adquirida por um sistema de imagem médica no referencial do sistema de localização.
[0037] Essa navegação pode ser realizada em vários tipos de intervenções cirúrgicas realizadas no osso de um paciente, incluindo, mas não limitado a: implantação de implantes ortopédicos, como parafusos pediculares, inserção de instrumentação cirúrgica, como trocar espinhal, para uso em procedimento de vertebroplastia, implantação de vários implantes ortopédicos, como implantes de quadril, joelho ou ombro, redução e fixação de fraturas durante procedimentos traumatológicos.
[0038] O sistema de imagem médica compreende pelo menos uma fonte de raios X e pelo menos um detector de raios-X. Por exemplo, o sistema de imagem médica pode ser um braço em C, um braço em O ou um scanner.
[0039] O sistema de imagem médica é motorizado em pelo menos um movimento que contribui para gerar uma trajetória de aquisição 3D, isto é, cada movimento do sistema de acordo com um grau de liberdade é gerado por um respectivo motor. Cada motor está associado a um codificador permitindo saber, a qualquer momento, a posição relativa do sistema de imagem médica em relação a uma posição de referência. Quando uma imagem 2D é adquirida, a posição correspondente do sistema de imagem é gravada. Assim, cada imagem 2D é registrada no referencial do sistema de imagem.
[0040] Em geral, várias imagens são adquiridas no início da intervenção cirúrgica e as ditas imagens são usadas para reconstrução de um volume 3D ou imagem 3D. Além disso, durante a intervenção cirúrgica, uma ou mais imagens extra 2D ou 3D podem ser adquiridas para verificar o progresso da intervenção.
[0041] A fluoro-navegação exige ainda um computador que inclua pelo menos um processador para realizar o algoritmo, permitindo registrar o volume 3D com um determinado referencial.
[0042] A Figura 1 mostra uma forma de realização de um instrumento modular (1).
[0043] O instrumento (1) compreende uma base (10) feita de um material radiotransparente, por exemplo, plásticos.
[0044] A base (10) pretende ser fixada rigidamente ao osso do paciente (B).
[0045] Por “fixado rigidamente” entende-se no presente texto que a base não se move em relação ao osso durante a intervenção cirúrgica. A fixação pode ser direta (por exemplo, como mostrado na Figura 1, usando pelo menos um pino percutâneo (2), agulha, broche ou parafuso implantado no osso de forma minimamente invasiva) ou indireta (ou seja, usando meios de fixação externos ao osso, como uma fita adesiva na pele próxima ao osso, cintas, etc. para imobilizar a base em relação ao osso sem passar pela pele do paciente). Por exemplo, como mostrado na Figura 2, um material deformável (3) é interposto entre a base (10) e a pele (S). O dito material deformável pode ser uma espuma termoendurecível de silicone, uma bolsa contendo microcontas que podem ser endurecidas sob vácuo ou uma fita adesiva. O material (3) que se encaixa na forma da parte do corpo proporciona alguma estabilidade à base em relação ao osso, especialmente em regiões não planas. A aderência entre o material (3) e a pele e a base pode ser obtida por propriedades adesivas do material ou por meios externos, tais como tiras, fita adesiva que rodeia a base. A fixação indireta é particularmente adaptada quando há apenas uma pequena espessura de tecidos moles entre o osso e a base, uma vez que esta situação é considerada como fornecendo rigidez suficiente para evitar qualquer movimento da base em relação ao osso. Por exemplo, a fixação indireta pode ser usada quando o osso pertence ao indicador de um paciente, pulso, pé, etc. Essa fixação indireta tem a vantagem de não ser invasiva. Se necessário, a fixação direta e indireta pode ser combinada. Por exemplo, na forma de realização da Figura 3, a base (10) está ligada à pele (S) através de um material deformável (3) que se encaixa na forma da parte do corpo e pelo menos um pino percutâneo (2), broche, agulha ou parafuso assegura ainda a base (10) ao osso (B). Se a intervenção é realizada em vários ossos, ou vários fragmentos de osso, é possível usar múltiplas bases, uma base por osso ou fragmento ósseo. Em uma forma de realização preferida, tal como uma articulação complexa de vários ossos, um material deformável que pode tornar-se rígido é usado primeiro para consertar os ossos individuais ou fragmentos de osso em conjunto: gesso convencional, material termo- deformável, poach de microesferas com vácuo, etc.. e a base é então fixada a este material deformável uma vez que é rígida.
[0046] A base (10) tem uma superfície de suporte (11) destinada a ficar voltada para o osso (a pele ou os tecidos do paciente que circundam o osso podem estar localizados entre a base e o osso). A dita superfície de suporte (11) pode ter qualquer forma (por exemplo, circular, retangular, etc.) e tamanho adequado para a aplicação pretendida, em particular dependendo da forma e tamanho da parte do corpo a que a base tem que ser fixada. Por exemplo, para a cirurgia da coluna, a base preferencialmente tem uma forma alongada de modo a ser fixada em pelo menos duas ou três vértebras adjacentes, enquanto que para a cirurgia do ombro a base é bastante circular com uma extensão oblonga de modo a ser fixada no acrômio. A superfície de suporte (11) pode prolongar- se em um plano ou pode ser côncava ou convexa, rígida ou deformável.
[0047] Como se mostrará em maior detalhe abaixo, a fixação é de preferência arquitetada de modo a evitar qualquer contato entre a superfície de suporte (11) e a pele (S), de modo a evitar machucar o paciente e, em particular, evitar a formação de feridas durante a intervenção cirúrgica que pode durar algumas horas. Assim, em uma forma de realização preferida, a superfície de suporte (11) é vantajosamente mantida a uma certa distância da pele do paciente.
[0048] A base vantajosamente tem geralmente uma altura inferior a 20 mm. Desta forma, a base é muito compacta e se projeta apenas em uma extensão limitada da pele do paciente. Assim, é bastante improvável que a equipe médica involuntariamente atinja a base e, assim, a desloca em relação ao osso durante a intervenção cirúrgica.
[0049] A base (10) possui um rastreador (20) acoplado rigidamente ao mesmo. O dito acoplamento pode ser permanente (o rastreador é integral com a base ou irreversivelmente fixado à base) ou temporário (sendo o rastreador destacável da base).
[0050] De acordo com uma forma de realização preferida, o rastreador pode ser separado da base quando não é necessário rastrear, oferecendo assim um acoplamento temporário. Isso reduz o risco de ter o rastreador atingido pela equipe médica e, assim, causar um deslocamento da base em relação ao osso. Também economiza espaço operacional quando o rastreador não é necessário.
[0051] No caso do dito acoplamento temporário, a base e o rastreador têm meios de fixação cooperantes que permitem separar e conectar o rastreador de uma maneira reproduzível (isto é, sempre em uma mesma posição e orientação conhecida em relação à base).
[0052] De acordo com uma forma de realização, o rastreador é um rastreador óptico (ativo ou passivo). Por exemplo, na forma de realização mostrada na Figura 1, o rastreador compreende uma pluralidade de bolas refletoras com uma posição relativa conhecida.
[0053] De acordo com outra forma de realização, o rastreador é um rastreador eletromagnético. Um rastreador eletromagnético tem a vantagem de ser mais compacto do que um rastreador óptico. Por exemplo, na forma de realização mostrada na Figura 4A, o rastreador (20) está embutido em um suporte (25) que pode ser fixado à base (10) com os meios de fixação reproduzíveis (12, 250). Em uma forma de realização alternativa, ilustrada na figura 4B, o rastreador (20) está alojado em um recesso da base (10) e assim não se projeta da base. O rastreador (20) pode ser removível ou não da base (10). Em uma forma de realização preferida, o rastreador eletromagnético contém sensores inerciais que podem ser usados para detectar a presença de artefatos.
[0054] A invenção não se limita a uma tecnologia de rastreamento específica e a pessoa experiente pode adaptar as formas de realização descritas à tecnologia selecionada.
[0055] O instrumento (1) compreende ainda um registro fantasma (30) destinado a ser fixado de forma rígida à base (10). O registro fantasma (30) é constituído por um material radiotransparente e compreende uma pluralidade de fiduciais radiopacos (31) tendo uma forma e tamanho conhecidos (por exemplo, bolas ou pinos) dispostos em uma posição conhecida.
[0056] Quando uma imagem 2D é adquirida com o sistema de imagem médica, os fiduciais radiopacos são visíveis na imagem 2D. Uma vez que a forma, o tamanho e o arranjo dos fiduciais radiopacos são conhecidos, a imagem pode ser determinada no referencial do fantasma de calibração e a reconstrução 3D pode ser realizada com base na posição dos fiduciais radiopacos em cada imagem 2D. Também é possível realizar uma reconstrução de imagem 3D diretamente sem usar os fiduciais e depois detectar os fiduciais diretamente na imagem 3D reconstruída.
[0057] Uma vez que o registro fantasma (30) não é necessário durante toda a intervenção cirúrgica, mas apenas em momentos específicos em que o registro das imagens adquiridas pelo sistema de imagem médica deve ser realizado, o registro fantasma (30) é destacável da base (10).
[0058] Para esse fim, a base (10) e o registro fantasma (30) têm meios de fixação cooperantes (12, 32) que permitem ligar o registro fantasma de forma reproduzível (isto é, sempre em uma mesma posição e orientação conhecida em relação à base). Isso permite economizar espaço operacional quando o fantasma não é necessário.
[0059] O registro fantasma (30) pode ter qualquer forma e tamanho adequados para a aplicação pretendida. Em particular, uma vez que o registro fantasma (30) é apenas fixado à base quando é necessário para o registro de imagens, o registro fantasma (30) pode ter um tamanho maior do que a base. Desta forma, é possível ter as bolas radiopacas localizadas a uma maior distância umas das outras e assim melhorar a precisão do registro.
[0060] De acordo com uma forma de realização, os meios de fixação compreendem pelo menos um indicador (12) que se projeta para a superfície da base oposta à superfície de suporte (11) e pelo menos uma abertura complementar (32) respectiva no registro fantasma (30). No entanto, esta forma de realização não é limitativa e uma pessoa experiente poderia projetar outro tipo de fixação reproduzível sem se afastar do escopo da presente invenção.
[0061] De preferência, como mostrado na Figura 5, a fixação reproduzível para o registro fantasma (30) é a mesma que para o rastreador (20) (quando o rastreador é destacável da base). Desta forma, o design da base é tão simples quanto possível e nenhum espaço é perdido, fornecendo duas áreas de fixação distintas na base.
[0062] Vantajosamente, o registro fantasma e, se aplicável, o rastreador, é mantido na base usando força magnética graças a um íman disposto na base. Assim, o anexo e a remoção do registro fantasma e, se aplicável, o rastreador, pode ser feito facilmente sem requerer nenhuma ferramenta. Esta fixação magnética também tem a vantagem de ser destacada automaticamente se um certo nível de forças for exercido na parte montada na base, o que evita danificar ou deslocar a posição relativa e a fixação da base em relação ao osso.
[0063] De acordo com uma forma de realização ilustrada na Figura 6A, o rastreador pode ser fixado de forma removível à base por uma fixação reproduzível que permite uma ou mais posições possíveis determinadas do rastreador em relação à base. Por exemplo, o rastreador (20) compreende um suporte (21) que compreende duas protuberâncias cilíndricas (22') engatando respectivas aberturas cilíndricas (12’) na superfície oposta à superfície de suporte (11) da base. A base compreende ainda um indicador (13) que se prolonga a partir da superfície oposta à superfície de suporte (11). O suporte (21) do rastreador compreende duas passagens (23) dispostas de tal modo que o indicador (13) engata uma passagem (23) quando o rastreador é fixado na base em uma primeira posição possível (veja o meio da figura 6A) e na outra passagem quando o rastreador é fixado na base na segunda posição possível (veja a direita da figura 6A). Como será explicado mais detalhadamente abaixo, a parte superior do indicador (13) serve como um ponto de referência para determinar a posição real do rastreador em relação à base usando uma ferramenta rastreada (24). Essa fixação simétrica é vantajosa na medida em que proporciona mais flexibilidade para a equipe médica para posicionar o rastreador no espaço operacional, em particular dependendo da posição de uma câmera de localização que é usada para navegação. Também é vantajoso liberar a restrição ligada ao posicionamento da base no osso no início do procedimento cirúrgico; a equipe médica pode se concentrar no posicionamento da base em relação ao osso, escolhendo a direção de posicionamento dependendo apenas da qualidade óssea da fixação óssea e depois posiciona o rastreador na base, dependendo da configuração operacional apropriada. Por outro lado, como mostrado na Figura 6B, a fixação reproduzível do registro fantasma (30) na base (10) é única. Para esse fim, o registro fantasma (30) compreende duas protuberâncias cilíndricas (32’) que cooperam com as aberturas cilíndricas (12’) na superfície oposta à superfície de suporte (11) da base, mas apenas uma passagem (33) para o indicador (13). Na forma de realização descrita acima, a duas possíveis posições do rastreador em relação à base são simétricas. No entanto, pode haver mais de duas posições possíveis para o rastreador. Por exemplo, para uma base com uma forma substancialmente circular (não mostrada), a fixação reproduzível pode compreender uma protrusão cónica no centro da base e os indicadores dispostos em posições angulares dadas para definir as possíveis posições do rastreador.
[0064] A Figura 7 mostra três formas de realização (A) a (C) da base (10) destinadas a serem fixadas ao osso por pelo menos um pino percutâneo (2), parafuso, agulha ou broche. Na descrição a seguir, o termo “pino” será usado para designar qualquer dispositivo percutâneo alongado para a fixação da base ao osso, incluindo um parafuso, um broche, uma agulha. Em geral, esse pino tem uma ponta pontiaguda (200) de modo a permitir a perfuração da pele e a implantação no osso, e um diâmetro compreendido entre 0,5 e 8 mm.
[0065] De acordo com uma forma de realização preferida, o pino (2) compreende um ressalto (201) localizado a uma distância limitada (alguns milímetros, por exemplo, 4 mm) da ponta (200). O ressalto (201) forma um ponto de contato que impede o praticante de inserir o pino no osso além da dita distância limitada. Este é um meio de segurança que evita danificar o osso ou os tecidos circundantes (por exemplo, o canal da coluna vertebral, estruturas vasculares) no caso de o pino não estar inserido exatamente na região desejada do osso. Além disso, o praticante também pode controlar que o pino é totalmente implantado no osso ao detectar que o ressalto entra em contato com o osso.
[0066] A base compreende uma pluralidade de orifícios de passagem (14) para passar um respectivo pino (2). Cada orifício de passagem tem uma forma cilíndrica com um diâmetro complementar ao diâmetro do pino. Cada orifício de passagem (14) tem uma altura suficiente para guiar o pino e evitar qualquer rotação do pino em relação à base. O número de orifícios de passagem é vantajosamente alto, de modo a proporcionar uma grande escolha para o praticante selecionar os orifícios mais adequados para receber pinos de modo a proporcionar uma fixação ótima ao osso. Pelo menos três pinos são necessários para evitar qualquer rotação da base em relação ao osso. De preferência, um número maior de pinos é usado para criar uma multi-restrição que permite impedir qualquer movimento da base.
[0067] Vantajosamente, os orifícios de passagem (14) não são paralelos entre si, de modo a proporcionar uma fixação mais estável da base (a multiplicidade dos ângulos dos pinos criando uma situação de multi-restrições). Além disso, pinos não paralelos permitem manter uma distância entre a base e a pele (ver a figura 8), que limita as restrições mecânicas aplicadas aos tecidos subjacentes.
[0068] Os pinos podem compreender um entalhe (não mostrado) permitindo que cada pino seja quebrado quando foi implantado no osso e fixado à base. Desta forma, a porção dos pinos que se estendem acima da base pode ser removida e, portanto, não obstruir o espaço de operação. Isso também facilita a fixação do fantasma e do rastreador. Caso contrário, o pino pode ser cortado por alicate adequado com bordas afiadas.
[0069] Na forma de realização (A) da Figura 7, a base (10) tem uma forma substancialmente retangular com várias regiões contendo os orifícios de passagem (14). Vantajosamente, as regiões em que os orifícios de passagem estão dispostos têm uma espessura limitada que define a altura necessária dos orifícios de passagem, e as ditas regiões estão rodeadas por uma flange periférica para aumentar a rigidez da base. Se o pino é quebrado ou cortado depois de ser fixado ao osso e fixado à base, o corte está de preferência localizado dentro da dita flange periférica de modo a não salientar da base.
[0070] Na forma de realização (B) da Figura 7, a base tem uma porção central (10a) substancialmente retangular com duas asas (10b) que se prolongam a partir dos lados longitudinais da porção (10a). Cada asa (10b) é vantajosamente inclinada em relação à superfície de suporte (11) e compreende uma pluralidade de orifícios de passagem (14) também inclinados com a superfície de suporte (11). As asas (10b) oferecem uma facilidade de utilização melhorada devido ao aumento da acessibilidade dos orifícios de passagem. A porção central (10a) também pode compreender uma pluralidade de orifícios de passagem.
[0071] Nas formas de realização (A), (B) e (C) da Figura 7, a base (10) compreende ainda pelo menos uma ranhura longitudinal (15) (de preferência duas) que se estende para dentro a partir de uma respectiva borda da base. Cada fenda se prolonga através da altura da base até a superfície de suporte (11). A dita ranhura permite um pré-posicionamento da base em relação ao osso. Primeiro, o praticante pode conectar dois pinos (2) ao osso, os pinos não sendo paralelos entre si. A posição dos ditos pinos é vantajosamente escolhida de modo a garantir uma boa fixação ao osso; em particular, o praticante seleciona regiões ósseas ideais para implantar a ponta dos pinos. Então, o praticante pode posicionar a base de modo que cada pino pré- posicionado (2) entre na respectiva ranhura (15). Ele então desliza a base ao longo dos pinos (2) até chegar à posição final da base em que a base (10) é encaixada nos pinos (2). Por exemplo, o praticante pode sentir manualmente a forma do osso subjacente e determinar se a base está corretamente colocada em relação às partes do osso às quais ele pode ser fixado otimamente. Em seguida, pinos adicionais (2) podem ser passados através dos orifícios de passagem (14) de modo a fixar rigidamente a base ao osso.
[0072] Na forma de realização (C) da Figura 7, os orifícios (14) são ainda dispostos ao longo de círculos concêntricos em uma porção central da base. Um orifício central pode também ser disposto no centro dos ditos círculos. Vantajosamente, os orifícios transversais de um círculo convergem para um ponto comum que é diferente de um círculo para o outro.
[0073] Obviamente, as formas de realização (A) a (C) não são limitativas e a pessoa habilitada pode definir outra disposição para os orifícios de passagem (14) e, se houver, as ranhuras (15); em particular, as características destas formas de realização podem ser combinadas sem se afastar do escopo da presente invenção.
[0074] O instrumento modular pode ser apresentado como um kit contendo várias bases de diferentes tamanhos e/ ou forma, mas um único rastreador e um único registro fantasma. Esta variedade de bases permite ao praticante selecionar a base mais adequada, dependendo da parte do corpo a ser tratada e/ ou das especificidades do paciente. Por exemplo, para um paciente obeso, pode ser necessário que os ângulos dos orifícios de passagem sejam maiores do que para um paciente magro. Inversamente, o instrumento modular pode ser apresentado como um kit contendo vários registros fantasmas e/ ou rastreadores de diferentes tamanhos e/ ou formas, mas uma única base. De acordo com outra forma de realização, o kit compreende uma pluralidade de bases com diferentes tamanhos e/ ou formas e uma pluralidade de rastreadores e de registros fantasmas de diferentes tamanhos e/ ou formas configurados para serem fixados de forma reproduzível a cada uma das ditas bases. Esta variedade permite ao praticante selecionar o instrumento adequado, dependendo do procedimento cirúrgico que ele deseja realizar. Por exemplo, para um paciente escoliotico cujas vértebras devem ser largamente deformadas, pode ser necessária que a orientação das esferas reflexivas em relação à face reproduzível do rastreador e suas dimensões externas globais sejam alteradas em relação a um paciente padrão.
[0075] Quando a posição correta da base em relação ao osso foi determinada e os pinos foram passados para os orifícios de passagem (e as ranhuras, se apropriado) e implantados no osso, o praticante fixa de forma reversível os pinos na base.
[0076] A Figura 9 ilustra várias maneiras de proteger um pino na base.
[0077] Na forma de realização (A), o pino (2) tem uma extremidade roscada que coopera com uma seção roscada do orifício de passagem (14).
[0078] Na forma de realização (B), o pino (2) é provido com um elemento (2b) disposto de forma deslizante ao redor do pino. Uma vez que o pino é implantado no osso (esquerdo), o praticante desliza o elemento (2b) até encaixar uma carcaça correspondente (10c) na base. Então, via impactação (e possível deformação da forma externa do elemento), ele fixa o elemento (2b) na caixa (10c) (meio). O elemento pode ter uma forma de cunha (esquerda e média) ou uma forma redonda (direita).
[0079] Na forma de realização (C), a base é proporcionada com um orifício roscado (10d) que se prolonga em uma direção substancialmente perpendicular à direção do orifício de passagem e que conduz ao dito orifício de passagem. Assim, quando o pino foi implantado no osso, um parafuso de pressão (2d) pode ser parafusado no orifício (10d) até entrar em contato e pressionar o pino (2).
[0080] Na forma de realização (D), a região da base que circunda o orifício de passagem pode ser deformável de modo a formar um dispositivo de travamento para o pino (2) e a pressão pode ser aplicada ao dispositivo de travamento, um pino foi implantado no osso por um parafuso de pressão (2d), um dispositivo de travamento deformável ou qualquer outro meio adequado. Esta forma de realização também é adequada para proteger um pino em uma ranhura (15) como mostrado na Figura 7 (B) e (C).
[0081] Na forma de realização (E), o orifício de passagem (14) tem a forma de uma ranhura que se prolonga a partir de um lado externo da base e que tem uma largura maior do que o diâmetro do pino (2). Uma vez que o pino foi implantado no osso, um elemento de cunha (2e) é inserido no orifício e mantém o pino contra a parede do orifício. Esta forma de realização também é adequada para proteger um pino em uma ranhura (15) como mostrado na Figura 7 (B) e (C).
[0082] Em outra forma de realização, a multiplicidade de pinos orientados com vários ângulos (como na figura 8) permite a fixação da base sem requerer nenhum meio externo.
[0083] A Figura 10 ilustra várias formas de realização do registro fantasma (30). Vantajosamente, o registro fantasma (30) compreende uma porção central que se destina a ser fixada na base e duas asas laterais (30b) que se estendem em ambos os lados da dita porção central (30a). De preferência, as asas laterais são integrantes com a porção central. Dependendo da aplicação, a base e as asas laterais podem se prolongar substancialmente em um plano; caso contrário, as asas laterais podem estar inclinadas em relação à porção central. Em outra forma de realização, as asas podem se estender acima da porção central.
[0084] A Figura 11 mostra uma forma de realização esquemática do rastreador (20) e do registro fantasma (30). Enquanto a base (10) é vantajosamente compacta para ter uma estabilidade ótima em relação ao osso (na ilustração, a base é fixada ao osso por dois pinos (2), mas também pode ser fixado por qualquer método direto ou indireto descrito acima). Em contraste, o rastreador (20) e/ ou o registro fantasma (30) compreendem um respectivo elemento alongado (26, 34) que permite colocar o rastreador e/ ou o registro fantasma em uma posição de deslocamento em relação à base. Os elementos alongados (26, 34) são representados por linhas tracejadas, sendo a sua forma e dimensão dependentes da aplicação cirúrgica pretendida. Esses elementos alongados permitem otimizar a posição do rastreador e/ ou da base enquanto mantém a base em uma posição ideal em termos de fixação óssea e acessibilidade. Por exemplo, o elemento alongado (34) pode permitir a fixação do registro perto do centro da região formada por imagem, de modo a ter os fiducialistas radiopacos (31) em uma posição ótima para a reconstrução da imagem 3D. No caso de um rastreador óptico, o elemento alongado (26) pode permitir colocar o rastreador em uma posição ideal no campo de visão da câmera de localização. O elemento alongado (26) pode permitir colocar o rastreador longe do local de intervenção, de modo a liberar espaço para o praticante. No caso de um rastreador eletromagnético, o elemento alongado (26) pode permitir colocar o rastreador próximo do local de intervenção, de modo a proporcionar uma localização mais precisa.
[0085] O instrumento modular pode ser usado de acordo com os seguintes protocolos.
[0086] A Figura 12 é um fluxograma que representa um protocolo que pode ser implementado durante uma intervenção cirúrgica usando um instrumento como descrito acima.
[0087] Na etapa 101, a base está fixada de forma rígida ao osso, de forma direta ou indireta.
[0088] Na etapa 102, o registro fantasma é fixado à base usando os meios de fixação reproduzíveis.
[0089] Na etapa 103, o sistema de imagem médica motorizada adquire imagens do paciente na região do osso.
[0090] Na etapa 104, um algoritmo de reconstrução 3D é implementado pelo computador de modo a gerar uma V imagem de volume 3D que é definida no referencial do sistema de imagem. A reconstrução 3D é conhecida per se e, portanto, não será descrita em detalhes aqui.
[0091] Por outro lado, um algoritmo de registro é implementado pelo computador de modo a gerar o volume 3D no referencial do registro fantasma, com base nas dimensões fantasmas conhecidas (RF fantasma notável) que são armazenadas em uma memória do computador ou que podem ser baixada de outro sistema. Este volume 3D é conhecido como V fantasma.
[0092] Na etapa 105, o registro fantasma é removido da base e o rastreador está fixado à base usando a fixação reproduzível (a menos que o rastreador esteja permanentemente fixado à base, caso em que o rastreador estará presente durante todo o protocolo).
[0093] Uma vez que o rastreador possui uma posição conhecida e a fixação em relação à base (classificador de RF), o computador implementa um algoritmo para gerar o volume 3D acima mencionado no referencial do rastreador. Este volume 3D é dito como V rastreador.
[0094] Na etapa 106, uma câmera de localização é instalada nas proximidades do paciente, de modo que o rastreador esteja no campo de visão da câmera.
[0095] O computador implementa um algoritmo para gerar o volume 3D no referencial da câmera. Este volume 3D é conhecido como V camera.
[0096] Na etapa 107, uma ferramenta de rastreamento é introduzida no campo operacional para realizar a intervenção cirúrgica. A ferramenta também está no campo de visão da câmera de localização, de modo que a posição da ponta da ferramenta (RF ferramenta notada) é conhecida a cada momento. A posição da ponta da ferramenta pode ser armazenada em uma memória do computador ou pode ser baixada de outro sistema.
[0097] Em seguida, o computador implementa um algoritmo para gerar o volume 3D no referencial da ferramenta rastreada. Este volume 3D é dito como V ferramenta. Assim, a navegação da ferramenta no volume V ferramenta pode ser realizada.
[0098] A Figura 13 é um fluxograma que representa um protocolo alternativo que pode ser implementado no caso de uma fixação simétrica do rastreador em relação à base.
[0099] As etapas que têm a mesma referência que na Figura 12 correspondem as mesmas etapas que no primeiro protocolo e, portanto, não serão descritos novamente.
[0100] Na etapa 105, o rastreador está fixado à base em qualquer uma das duas possíveis posições simétricas. Vantajosamente, o rastreador está posicionado na posição correspondente a um ótimo campo de visão para a câmera de localização a ser usada para navegação ou como consequência direta da configuração da câmera na sala de operação.
[0101] Uma vez que o rastreador possui uma posição conhecida e a fixação em relação à base, o computador implementa um algoritmo para gerar um primeiro volume 3D no referencial do rastreador, assumindo que o rastreador está na primeira posição (por exemplo, esquerda) e um segundo volume 3D no referencial do rastreador assumindo que o rastreador está na segunda posição (por exemplo, à direita). Estes volumes 3D são ditos como V rastreador L e V rastreador R, respectivamente.
[0102] Na etapa 106, a câmera de localização é instalada nas proximidades do paciente, de modo que o rastreador esteja no campo de visão da câmera.
[0103] O computador implementa um algoritmo para gerar cada um dos volumes 3D acima mencionados no referencial da câmera. Estes volumes 3D são ditos como V camera L e V camera R, respectivamente.
[0104] Na etapa 107, uma ferramenta de rastreamento é introduzida no campo operacional para realizar a intervenção cirúrgica. A ferramenta também está no campo de visão da câmera de localização, de modo que a posição da ponta da ferramenta é conhecida em cada momento. A posição da ponta da ferramenta pode ser armazenada em uma memória do computador ou pode ser baixada de outro sistema.
[0105] Então, o computador implementa um algoritmo para gerar cada um dos volumes 3D acima mencionados no referencial da ferramenta rastreada. Estes volumes 3D são ditos como V ferramenta L e V ferramenta R, respectivamente.
[0106] Para determinar a posição real do rastreador em relação à base, escolha entre V ferramenta L ou V ferramenta R, uma ferramenta de rastreamento (que pode ser igual à ferramenta acima mencionada ou outra) está posicionada de modo a entrar em contato com um ponto de referência na base com a sua ponta (etapa 108).
[0107] Uma vez que a posição do dito ponto de referência (RF ponto de referência notado) é conhecida, o computador implementa um algoritmo para comparar a posição do ponto de referência e a posição da ponta da ferramenta e selecionar o referencial (L ou R) em conformidade.
[0108] Assim, a navegação da ferramenta no referencial apropriado pode ser realizada.
[0109] Os protocolos acima referem-se a características de referência, como ponta de ferramenta, ponto de referência, dimensões de fantasmas, dimensões de rastreador que são conhecidas em cada momento.
[0110] Em uma forma de realização preferida, estas características de referência podem ser armazenadas em uma memória do computador.
[0111] Em outra forma de realização, as características de referência podem ser geradas por uma parte do sistema, como calibradores para instrumentos e/ ou algoritmo de calibração do próprio sistema de localização. Esta forma de realização se adapta particularmente ao uso de instrumentos reutilizáveis.
[0112] Em outra forma de realização, as características de referência podem ser baixadas de outro sistema que pode ser um dispositivo de armazenamento (ou seja, dispositivo USB externo) ou um dispositivo de leitura como leitor de código de barras ou leitor de matriz de dados diretamente fixado ao dispositivo de memória ou instalado no sistema. Vantajosamente, a matriz de dados (ou seja, o código QR) contém todas as dimensões de referência a serem transferidas para o sistema e podem ser impressas em um formato de cartão dentro da embalagem do instrumento. Esta encarnação se adapta particularmente ao uso de instrumentos de uso único. Ele apresenta a vantagem de não precisar de atualização de software em caso de modificação de recursos de referência. Por exemplo, a Figura 14 mostra um cartão de identificação C10 para a base. Nesta forma de realização, as características de referência da base estão contidas em um código de barras BC impresso no cartão. A Figura 15 mostra os cartões de identificação C10, C30, C20 e C24 para a base, o registro fantasma, o rastreador e a ferramenta, respectivamente. As respectivas características de referência de cada um dos ditos componentes estão contidas em uma matriz de dados (respectivamente QR10, QR30, QR20 e QR24) impressas no cartão. Assim, quando um usuário quer usar um novo componente, ele/ ela só precisa ler o código de barras ou matriz de dados usando um leitor adequado para baixar os recursos de referência desse componente. Em seguida, o computador usa os ditos recursos de referências durante a implementação do protocolo.
Claims (12)
1. DISPOSITIVO PARA INSTALAÇÃO MINIMAMENTE INVASIVA DE UM RASTREADOR (20) E/ OU DE UM REGISTRO FANTASMA (REGISTRATION PHANTOM) (30) AO OSSO DE UM PACIENTE, compreendendo uma base (10) feita de um material radiotransparente, caracterizado pela base (10) compreender: - uma superfície de suporte (11) configurada para ficar voltada para o osso, - uma pluralidade de orifícios de passagem não paralelos (14) para passar um respectivo pino percutâneo (2) através da base (10) para fixar a base (10) ao osso através da pele ou tecidos do paciente; - pelo menos uma ranhura (15) que se prolonga a partir de uma borda da base (10) em uma direção transversal aos orifícios de passagem (14), a ranhura (15) passando por toda a base (10) até a superfície de suporte (11) e sendo configurada para engatar um pino percutâneo (2) implantado no osso do paciente de modo a permitir que a base (10) deslize ao longo do dito pino (2); e - um sistema de fixação reproduzível para conectar o rastreador (20) e/ ou o registro fantasma (30) à base.
2. DISPOSITIVO, de acordo com a reivindicação 1, caracterizado por compreender ainda uma pluralidade de pinos percutâneos (2) configurados para passarem através de pelo menos uma ranhura (15) e dos orifícios de passagem não paralelos (14).
3. DISPOSITIVO, de acordo com a reivindicação 2, caracterizado pelas respectivas orientações dos orifícios de passagem não paralelos (14) serem arquitetadas de modo a evitar qualquer contato entre a base (10) e a pele do paciente (S), quando os pinos percutâneos (2) que passam através dos orifícios de passagem (14) são implantados no osso do paciente (B).
4. DISPOSITIVO, de acordo com qualquer uma das reivindicações 1 a 3, caracterizado por pelo menos parte dos orifícios de passagem não paralelos (14) estarem dispostos ao longo de uma pluralidade de círculos concêntricos, em que os orifícios de passagem (14) de um círculo convergem todos para um ponto comum que é diferente de um círculo para o outro.
5. DISPOSITIVO, de acordo com qualquer uma das reivindicações 1 a 4, caracterizado pela base (10) compreender uma porção central (10a) e duas asas (10b), que compreendem orifícios de passagem não paralelos (14) que se estendem em ambos os lados da dita porção central (10a).
6. DISPOSITIVO, de acordo com a reivindicação 2, caracterizado pelos ditos pinos (2) compreenderem um ressalto (201) localizado a uma distância da ponta (200) destinada a ser implantada no osso de um paciente, o ressalto (201) formando um ponto de contato (abutment) que impede a inserção do pino no osso a uma distância maior do que a dita distância.
7. DISPOSITIVO, de acordo com qualquer uma das reivindicações 1 a 6, caracterizado por compreender ainda um sistema de fixação para fixar rigidamente cada um dos ditos pinos à base (10).
8. DISPOSITIVO, de acordo com a reivindicação 7, caracterizado pelo sistema de fixação compreender pelo menos um dos seguintes: uma seção roscada (2a) do pino que coopera com uma respectiva seção roscada do orifício de passagem (14); um elemento (2b) configurado para deslizar ao longo do pino (2) configurado para engatar de forma forçada a uma carcaça correspondente (10a) na base; um parafuso de pressão (2d); um dispositivo de travamento (clamp); e um elemento de cunha (2e).
9. DISPOSITIVO, de acordo com qualquer uma das reivindicações 1 a 8, caracterizado por ainda compreender um rastreador (20) e um registro fantasma (30), em que o sistema de fixação reproduzível é configurado de modo a proporcionar uma ou mais posições de montagem definidas para o rastreador (20) em relação à base (10) e uma posição única para o registro fantasma (30) em relação à base (10).
10. DISPOSITIVO, de acordo com qualquer uma das reivindicações 1 a 8, caracterizado por compreender uma pluralidade de bases (10) com diferentes tamanhos e/ ou formas, um único rastreador (20) e um único registro fantasma (30), em que cada um do único rastreador (20) e do único registro fantasma (30) é configurado para ser fixado de forma reproduzível a cada uma das ditas bases.
11. DISPOSITIVO, de acordo com qualquer uma das reivindicações 1 a 8, caracterizado por compreender uma única base (10) e uma pluralidade de rastreadores (20) e de registros fantasmas (30), em que cada um dos rastreadores (20) e registros fantasmas (30) é configurado para ser fixado de forma reproduzível à dita base.
12. DISPOSITIVO, de acordo com qualquer uma das reivindicações 1 a 8, caracterizado por compreender uma pluralidade de bases (10) com diferentes tamanhos e/ou formas e uma pluralidade de rastreadores (20) e de registros fantasmas (30) de diferentes tamanhos e/ou formas configurados para serem fixados de forma reproduzível a cada uma das ditas bases.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| EP15306635.2 | 2015-10-14 | ||
| EP15306635 | 2015-10-14 | ||
| PCT/EP2016/074784 WO2017064290A1 (en) | 2015-10-14 | 2016-10-14 | Device for minimally invasive attachment of a tracker and/or a registration phantom to a patient's bone |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| BR112018007487A2 BR112018007487A2 (pt) | 2019-04-24 |
| BR112018007487B1 true BR112018007487B1 (pt) | 2022-11-16 |
Family
ID=54360376
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| BR112018007487-0A BR112018007487B1 (pt) | 2015-10-14 | 2016-10-14 | Dispositivo para instalação minimalmente invasiva de um rastreador e/ ou de um registro fantasma ao osso de um paciente |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US11147649B2 (pt) |
| EP (1) | EP3361957B1 (pt) |
| JP (1) | JP6843851B2 (pt) |
| CN (1) | CN108135590B (pt) |
| AU (1) | AU2016337011B2 (pt) |
| BR (1) | BR112018007487B1 (pt) |
| WO (1) | WO2017064290A1 (pt) |
Families Citing this family (16)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10653497B2 (en) * | 2006-02-16 | 2020-05-19 | Globus Medical, Inc. | Surgical tool systems and methods |
| US11395706B2 (en) * | 2012-06-21 | 2022-07-26 | Globus Medical Inc. | Surgical robot platform |
| GB2536650A (en) | 2015-03-24 | 2016-09-28 | Augmedics Ltd | Method and system for combining video-based and optic-based augmented reality in a near eye display |
| US10624764B2 (en) * | 2015-11-26 | 2020-04-21 | Orthosoft Ulc | System and method for the registration of an anatomical feature |
| EP3241518A3 (en) * | 2016-04-11 | 2018-01-24 | Globus Medical, Inc | Surgical tool systems and methods |
| FR3057757B1 (fr) * | 2016-10-21 | 2021-04-16 | Medtech | Dispositif et procede de recalage automatique pour des images intra operatoires 3d |
| TWI689279B (zh) * | 2018-04-03 | 2020-04-01 | 寶楠生技股份有限公司 | 骨折固定針的外固定裝置 |
| US11766296B2 (en) | 2018-11-26 | 2023-09-26 | Augmedics Ltd. | Tracking system for image-guided surgery |
| US20200170751A1 (en) * | 2018-11-30 | 2020-06-04 | Think Surgical, Inc. | System and method for fiducial attachment for orthopedic surgical procedures |
| US20210030511A1 (en) * | 2019-07-29 | 2021-02-04 | Augmedics Ltd. | Fiducial marker |
| JP2022552310A (ja) * | 2019-10-10 | 2022-12-15 | インターセクト イーエヌティー インターナショナル ゲーエムベーハー | レジストレーション方法及びナビゲーションシステム |
| EP3821844A1 (en) | 2019-11-12 | 2021-05-19 | Surgivisio | System for determining an optimal position of a surgical instrument relative to a patient's bone tracker |
| US11382712B2 (en) | 2019-12-22 | 2022-07-12 | Augmedics Ltd. | Mirroring in image guided surgery |
| EP4351468A1 (en) * | 2021-06-08 | 2024-04-17 | Stryker European Operations Limited | Surgical reference body for referencing a patient's anatomy during surgery |
| EP4230172A1 (en) | 2022-02-17 | 2023-08-23 | Ecential Robotics | Surgical robotic system for cementoplasty |
| EP4344667A1 (en) * | 2022-09-28 | 2024-04-03 | Stryker European Operations Limited | Bone clamp and surgical tracking system comprising the bone clamp |
Family Cites Families (14)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5078719A (en) * | 1990-01-08 | 1992-01-07 | Schreiber Saul N | Osteotomy device and method therefor |
| US5720752A (en) * | 1993-11-08 | 1998-02-24 | Smith & Nephew, Inc. | Distal femoral cutting guide apparatus with anterior or posterior referencing for use in knee joint replacement surgery |
| US5935128A (en) * | 1997-04-18 | 1999-08-10 | Bristol-Myers Squibb Co. | Orthopaedic template system including a joint locator |
| US7107091B2 (en) * | 2002-07-25 | 2006-09-12 | Orthosoft Inc. | Multiple bone tracking |
| WO2004069073A2 (en) * | 2003-02-04 | 2004-08-19 | Orthosoft, Inc. | Cas modular bone reference and limb position measurement system |
| US8535329B2 (en) * | 2004-10-29 | 2013-09-17 | Kinamed, Inc. | Tracking tools and method for computer-assisted shoulder replacement surgery |
| FR2941364B1 (fr) | 2009-01-26 | 2011-02-25 | Univ Joseph Fourier | Appareil de fixation d'un referentiel optique sur une personne |
| WO2010128409A2 (en) | 2009-05-06 | 2010-11-11 | Blue Ortho | Reduced invasivity fixation system for trackers in computer assisted surgery |
| US9839486B2 (en) * | 2010-04-14 | 2017-12-12 | Smith & Nephew, Inc. | Systems and methods for patient-based computer assisted surgical procedures |
| DE202011005573U1 (de) * | 2011-04-21 | 2012-04-23 | Isys Medizintechnik Gmbh | Vorrichtung zur Fixierung |
| EP2676627B1 (en) * | 2012-04-18 | 2021-07-28 | Medtronic Navigation, Inc. | System and method for automatic registration between an image and a subject |
| EP2941205B1 (en) * | 2013-01-07 | 2017-03-29 | Zimmer, Inc. | Distal resection systems |
| EP3175791B1 (en) * | 2013-11-04 | 2021-09-08 | Ecential Robotics | Method for reconstructing a 3d image from 2d x-ray images |
| EP3086733A1 (en) | 2013-12-20 | 2016-11-02 | Brainlab AG | Holder for the attachment of a reference marker device to a body part |
-
2016
- 2016-10-14 WO PCT/EP2016/074784 patent/WO2017064290A1/en active Application Filing
- 2016-10-14 JP JP2018518689A patent/JP6843851B2/ja active Active
- 2016-10-14 AU AU2016337011A patent/AU2016337011B2/en active Active
- 2016-10-14 EP EP16784457.0A patent/EP3361957B1/en active Active
- 2016-10-14 CN CN201680059851.0A patent/CN108135590B/zh active Active
- 2016-10-14 US US15/768,493 patent/US11147649B2/en active Active
- 2016-10-14 BR BR112018007487-0A patent/BR112018007487B1/pt active IP Right Grant
Also Published As
| Publication number | Publication date |
|---|---|
| US11147649B2 (en) | 2021-10-19 |
| CN108135590A (zh) | 2018-06-08 |
| AU2016337011A1 (en) | 2018-05-10 |
| WO2017064290A1 (en) | 2017-04-20 |
| JP6843851B2 (ja) | 2021-03-17 |
| EP3361957A1 (en) | 2018-08-22 |
| CN108135590B (zh) | 2021-10-15 |
| BR112018007487A2 (pt) | 2019-04-24 |
| AU2016337011B2 (en) | 2021-07-08 |
| US20180311011A1 (en) | 2018-11-01 |
| EP3361957B1 (en) | 2023-07-05 |
| JP2018532484A (ja) | 2018-11-08 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| BR112018007487B1 (pt) | Dispositivo para instalação minimalmente invasiva de um rastreador e/ ou de um registro fantasma ao osso de um paciente | |
| US11253322B2 (en) | Fluoro-navigation system for navigating a tool relative to a medical image | |
| ES2595366T3 (es) | Sistema de cirugía estereotáctica asistida por ordenador basada en una visualización tridimensional | |
| US11278355B2 (en) | Modular fluoro-navigation instrument | |
| US10952751B2 (en) | Surgical targeting systems and methods | |
| US9066734B2 (en) | Patient-specific sacroiliac guides and associated methods | |
| EP3494903B1 (en) | Spinous process clamp | |
| WO2014176207A1 (en) | Patient-specific guides to improve point registration accuracy in surgical navigation | |
| US7776000B2 (en) | Non-invasive system for fixing navigational reference | |
| US10939889B2 (en) | Optical shape sensing for fluoroscopic surgical navigation | |
| RU2727761C1 (ru) | Неинвазивное нейронавигационное устройство для фиксации трекеров | |
| CN113876423A (zh) | 用于骨科手术的定位装置及系统 | |
| IL262864A (en) | Clamps for the spinal bone |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| B06U | Preliminary requirement: requests with searches performed by other patent offices: procedure suspended [chapter 6.21 patent gazette] | ||
| B350 | Update of information on the portal [chapter 15.35 patent gazette] | ||
| B09A | Decision: intention to grant [chapter 9.1 patent gazette] | ||
| B16A | Patent or certificate of addition of invention granted [chapter 16.1 patent gazette] |
Free format text: PRAZO DE VALIDADE: 20 (VINTE) ANOS CONTADOS A PARTIR DE 14/10/2016, OBSERVADAS AS CONDICOES LEGAIS |