BR112018003049B1 - Sistema para controlar um parâmetro regulado de um dispositivo e conjunto - Google Patents
Sistema para controlar um parâmetro regulado de um dispositivo e conjunto Download PDFInfo
- Publication number
- BR112018003049B1 BR112018003049B1 BR112018003049-0A BR112018003049A BR112018003049B1 BR 112018003049 B1 BR112018003049 B1 BR 112018003049B1 BR 112018003049 A BR112018003049 A BR 112018003049A BR 112018003049 B1 BR112018003049 B1 BR 112018003049B1
- Authority
- BR
- Brazil
- Prior art keywords
- law
- command
- model
- local gain
- transfer function
- Prior art date
Links
- 230000001105 regulatory effect Effects 0.000 title claims abstract description 50
- 230000001276 controlling effect Effects 0.000 title claims abstract description 10
- 230000004044 response Effects 0.000 claims abstract description 7
- 238000012546 transfer Methods 0.000 claims description 51
- 230000003068 static effect Effects 0.000 claims description 16
- 230000008859 change Effects 0.000 claims description 4
- 230000036962 time dependent Effects 0.000 claims description 3
- 238000013178 mathematical model Methods 0.000 claims description 2
- 230000006870 function Effects 0.000 description 53
- 238000004364 calculation method Methods 0.000 description 8
- 238000005259 measurement Methods 0.000 description 6
- 238000000034 method Methods 0.000 description 4
- 101100004001 Caenorhabditis elegans xnp-1 gene Proteins 0.000 description 3
- 230000000694 effects Effects 0.000 description 3
- 230000010354 integration Effects 0.000 description 3
- 230000008569 process Effects 0.000 description 3
- 230000002441 reversible effect Effects 0.000 description 3
- JKIYPXKCQBHOLY-UHFFFAOYSA-N 5-(dimethylamino)-2-(1,3-thiazol-2-yldiazenyl)benzoic acid Chemical compound OC(=O)C1=CC(N(C)C)=CC=C1N=NC1=NC=CS1 JKIYPXKCQBHOLY-UHFFFAOYSA-N 0.000 description 2
- 238000012937 correction Methods 0.000 description 2
- 238000012888 cubic function Methods 0.000 description 2
- 230000001052 transient effect Effects 0.000 description 2
- 230000009471 action Effects 0.000 description 1
- 230000015572 biosynthetic process Effects 0.000 description 1
- 238000007796 conventional method Methods 0.000 description 1
- 238000012217 deletion Methods 0.000 description 1
- 230000037430 deletion Effects 0.000 description 1
- 230000008034 disappearance Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000006467 substitution reaction Methods 0.000 description 1
- 238000003786 synthesis reaction Methods 0.000 description 1
- 230000002123 temporal effect Effects 0.000 description 1
- 230000009466 transformation Effects 0.000 description 1
- 238000011144 upstream manufacturing Methods 0.000 description 1
Images






Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64D—EQUIPMENT FOR FITTING IN OR TO AIRCRAFT; FLIGHT SUITS; PARACHUTES; ARRANGEMENT OR MOUNTING OF POWER PLANTS OR PROPULSION TRANSMISSIONS IN AIRCRAFT
- B64D31/00—Power plant control systems; Arrangement of power plant control systems in aircraft
- B64D31/02—Initiating means
- B64D31/06—Initiating means actuated automatically
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B13/00—Adaptive control systems, i.e. systems automatically adjusting themselves to have a performance which is optimum according to some preassigned criterion
- G05B13/02—Adaptive control systems, i.e. systems automatically adjusting themselves to have a performance which is optimum according to some preassigned criterion electric
- G05B13/04—Adaptive control systems, i.e. systems automatically adjusting themselves to have a performance which is optimum according to some preassigned criterion electric involving the use of models or simulators
- G05B13/042—Adaptive control systems, i.e. systems automatically adjusting themselves to have a performance which is optimum according to some preassigned criterion electric involving the use of models or simulators in which a parameter or coefficient is automatically adjusted to optimise the performance
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02C—GAS-TURBINE PLANTS; AIR INTAKES FOR JET-PROPULSION PLANTS; CONTROLLING FUEL SUPPLY IN AIR-BREATHING JET-PROPULSION PLANTS
- F02C9/00—Controlling gas-turbine plants; Controlling fuel supply in air- breathing jet-propulsion plants
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05B—CONTROL OR REGULATING SYSTEMS IN GENERAL; FUNCTIONAL ELEMENTS OF SUCH SYSTEMS; MONITORING OR TESTING ARRANGEMENTS FOR SUCH SYSTEMS OR ELEMENTS
- G05B13/00—Adaptive control systems, i.e. systems automatically adjusting themselves to have a performance which is optimum according to some preassigned criterion
- G05B13/02—Adaptive control systems, i.e. systems automatically adjusting themselves to have a performance which is optimum according to some preassigned criterion electric
- G05B13/04—Adaptive control systems, i.e. systems automatically adjusting themselves to have a performance which is optimum according to some preassigned criterion electric involving the use of models or simulators
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F02—COMBUSTION ENGINES; HOT-GAS OR COMBUSTION-PRODUCT ENGINE PLANTS
- F02C—GAS-TURBINE PLANTS; AIR INTAKES FOR JET-PROPULSION PLANTS; CONTROLLING FUEL SUPPLY IN AIR-BREATHING JET-PROPULSION PLANTS
- F02C6/00—Plural gas-turbine plants; Combinations of gas-turbine plants with other apparatus; Adaptations of gas-turbine plants for special use
- F02C6/20—Adaptations of gas-turbine plants for driving vehicles
- F02C6/206—Adaptations of gas-turbine plants for driving vehicles the vehicles being airscrew driven
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F05—INDEXING SCHEMES RELATING TO ENGINES OR PUMPS IN VARIOUS SUBCLASSES OF CLASSES F01-F04
- F05D—INDEXING SCHEME FOR ASPECTS RELATING TO NON-POSITIVE-DISPLACEMENT MACHINES OR ENGINES, GAS-TURBINES OR JET-PROPULSION PLANTS
- F05D2220/00—Application
- F05D2220/30—Application in turbines
- F05D2220/32—Application in turbines in gas turbines
- F05D2220/323—Application in turbines in gas turbines for aircraft propulsion, e.g. jet engines
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F05—INDEXING SCHEMES RELATING TO ENGINES OR PUMPS IN VARIOUS SUBCLASSES OF CLASSES F01-F04
- F05D—INDEXING SCHEME FOR ASPECTS RELATING TO NON-POSITIVE-DISPLACEMENT MACHINES OR ENGINES, GAS-TURBINES OR JET-PROPULSION PLANTS
- F05D2270/00—Control
- F05D2270/01—Purpose of the control system
- F05D2270/02—Purpose of the control system to control rotational speed (n)
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F05—INDEXING SCHEMES RELATING TO ENGINES OR PUMPS IN VARIOUS SUBCLASSES OF CLASSES F01-F04
- F05D—INDEXING SCHEME FOR ASPECTS RELATING TO NON-POSITIVE-DISPLACEMENT MACHINES OR ENGINES, GAS-TURBINES OR JET-PROPULSION PLANTS
- F05D2270/00—Control
- F05D2270/30—Control parameters, e.g. input parameters
- F05D2270/335—Output power or torque
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F05—INDEXING SCHEMES RELATING TO ENGINES OR PUMPS IN VARIOUS SUBCLASSES OF CLASSES F01-F04
- F05D—INDEXING SCHEME FOR ASPECTS RELATING TO NON-POSITIVE-DISPLACEMENT MACHINES OR ENGINES, GAS-TURBINES OR JET-PROPULSION PLANTS
- F05D2270/00—Control
- F05D2270/40—Type of control system
- F05D2270/44—Type of control system active, predictive, or anticipative
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F05—INDEXING SCHEMES RELATING TO ENGINES OR PUMPS IN VARIOUS SUBCLASSES OF CLASSES F01-F04
- F05D—INDEXING SCHEME FOR ASPECTS RELATING TO NON-POSITIVE-DISPLACEMENT MACHINES OR ENGINES, GAS-TURBINES OR JET-PROPULSION PLANTS
- F05D2270/00—Control
- F05D2270/70—Type of control algorithm
- F05D2270/71—Type of control algorithm synthesized, i.e. parameter computed by a mathematical model
Landscapes
- Engineering & Computer Science (AREA)
- General Physics & Mathematics (AREA)
- Automation & Control Theory (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Evolutionary Computation (AREA)
- Medical Informatics (AREA)
- Software Systems (AREA)
- Artificial Intelligence (AREA)
- Health & Medical Sciences (AREA)
- Physics & Mathematics (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Aviation & Aerospace Engineering (AREA)
- Mechanical Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Feedback Control In General (AREA)
Abstract
SISTEMA PARA CONTROLAR UM PARÂMETRO REGULADO DE UM DISPOSITIVO E CONJUNTO. A presente invenção se refere a um conjunto e a um sistema de controle (1) para controlar um parâmetro controlado (Y) de um dispositivo de equipamento aeronáutico (2), sendo que o dito parâmetro controlado é administrado por uma lei de operação que liga o dito parâmetro controlado a um comando (U) e a uma pluralidade de parâmetros de entrada (X1, X2, X3), sendo que o dito sistema de controle compreende uma alça de controle que controla o dito parâmetro controlado para um ponto de ajuste (yc) por meio do controle do dispositivo pelo comando, sendo que o sistema compreende um módulo de compensação da lei de operação (7) e um módulo de determinação (8) que determina um ganho local configurado para determinar o ganho local de uma parte estável de um modelo da lei de operação representativo do ganho do dito parâmetro controlado, em resposta a uma variação no dito comando em um regime de operação estabilizado da dita lei de operação, sendo que o dito módulo de compensação da lei de operação usa o inverso do dito ganho local.
Description
[001] O campo da presente invenção refere-se aos sistemas para controlar um parâmetro regulado de um dispositivo de equipamento aeronáutico e se aplica vantajosamente a um dispositivo de propulsão de aeronave. Operar um dispositivo que equipa uma aeronave, tal como um motor, é altamente complexo, o que envolve muitos parâmetros, e as restrições de segurança específicas para aeronáutica precisam de controle de segurança particularmente preciso e seguro. A invenção se aplica, vantajosamente, a turboélices e, mais particularmente, à determinação de um comando para servocontrolar a potência de tal turboélice e para servocontrolar a velocidade de seu propulsor.
[002] De modo mais geral, a Figura 1 ilustra um sistema de controle de regulagem 1 por meio de servocontrole em um ponto de ajuste Yc de um parâmetro regulado Y de um dispositivo físico 2. O controle visa manter pelo menos uma magnitude física, denominada parâmetro regulado, igual a um valor objetivado, denominado ponto de ajuste, pela ação sobre uma variável de regulagem por meio de um comando U. O sistema 1 compreende um regulador 3 que libera o dito comando U e que insere a saída ε de um diferenciador 5 que libera a diferença entre uma alça de retorno 4 do parâmetro regulado Y e o ponto de ajuste Yc.
[003] Tal sistema está sendo usado atualmente em automação para servocontrolar o parâmetro regulado Y no ponto de ajuste Yc. A dificuldade está determinando a função de transferência do regulador 3. Na verdade, é essa função de transferência que determina o comportamento do dispositivo 2, por meio do comando U. Para dispositivos simples, é fácil determinar a forma da função de transferência do regulador 3 para alcançar uma resposta a partir do dispositivo 2, o que atende aos requisitos de rapidez e segurança. Mas, visto que o dispositivo se torna complexo, projetar um regulador aceitável 3 se torna complicado, ou mesmo impossível.
[004] Especialmente para dispositivos 2, dos quais a saída, ou seja, o parâmetro regulado Y, depende, exceto o comando U, de muitos parâmetros variáveis, denominados parâmetros de entrada, as técnicas convencionais de determinação da função de transferência do regulador 3 não se aplicam mais. Isso é verdadeiro, em particular, quando as relações entre o comando U, os parâmetros de entrada e o parâmetro regulado Y envolvem não linearidades.
[005] O objetivo da presente invenção é retificar as desvantagens do estado da técnica propondo-se um sistema para controlar um parâmetro regulado de um dispositivo de equipamento aeronáutico, sendo que o dito parâmetro regulado é administrado por uma lei de operação que liga o dito parâmetro regulado a um comando e a uma pluralidade de parâmetros de entrada, sendo que o dito sistema de controle de regulagem compreende uma alça de regulagem que servocontrola o dito parâmetro regulado em um ponto de ajuste por meio do comando que controla o dispositivo,
[006] com a observação de que o sistema compreende um módulo de compensação da lei de operação e um módulo de determinação de um ganho local configurado para determinar o ganho local de uma parte estável de um modelo da lei de operação representativo do ganho do dito parâmetro regulado em resposta a uma variação no dito comando em um estado de operação estável da dita lei de operação, sendo que a dita parte estável do modelo da lei de operação combina as relações independentes de tempo entre o parâmetro regulado, o comando e a pluralidade de parâmetros de entrada, sendo que o dito modelo da lei de operação também compreende uma parte dinâmica que combina as relações dependentes de tempo entre o parâmetro regulado, o comando e a pluralidade de parâmetros de entrada, sendo que o dito módulo de compensação da lei de operação envolve o inverso do dito ganho local.
[007] A inclusão, em um módulo de compensação, da lei de operação do inverso de um ganho local determinado, portanto, desse modo, compensa a lei de operação, mesmo no caso de não linearidades na lei de operação. O parâmetro regulado pode ser servocontrolado dispensando-se essas não linearidades.
[008] O sistema é vantajosamente complementado pelos seguintes recursos, obtidos individualmente ou em qualquer uma de suas combinações tecnicamente possíveis: - o ganho local é calculado a partir dos valores obtidos pelas saídas de uma parte estável de um modelo da lei de operação para pelo menos dois valores do comando separados U na conservação dos parâmetros de entrada constantes; - a diferença entre os dois valores do comando separados é de menos de 0,25% da faixa de variação no dito comando e/ou a diferença entre os dois valores do comando separados corresponde a uma variação no dito comando que causa uma variação no parâmetro regulado de menos de 1% da faixa de variação no dito parâmetro regulado; - o módulo de determinação do ganho local é configurado para liberar um valor de saturação predeterminado quando o ganho local calculado pelo dito módulo de determinação está abaixo de um valor predefinido; - o módulo de determinação do ganho local é configurado de modo que pelo menos com cada mudança do comando e/ou os parâmetros de entrada, um novo ganho local seja determinado para refletir as ditas mudanças; - a alça de regulagem compreende um regulador constituído em série por um corretor e pelo dito módulo de compensação da lei de operação, sendo que o comando corresponde à saída do regulador; - o módulo de compensação da lei de operação também compreende uma primeira função de transferência do inverso da parte dinâmica do modelo da lei de operação; - o modelo da lei de operação compreende uma parte inversível e uma parte não inversível, e o módulo de compensação da lei de operação compreende uma compensação estática que corresponde ao inverso do ganho local K e uma compensação dinâmica que compreende uma passagem dianteira e uma passagem de retroalimentação que constitui uma alça de retroalimentação, em que a passagem dianteira compreende uma segunda função de transferência que envolve o inverso da parte inversível do modelo da lei de operação e a passagem de retroalimentação compreende uma terceira função de transferência que envolve a parte não inversível do modelo da lei de operação.
[009] A invenção também se refere a um conjunto que compreende um dispositivo de equipamento aeronáutico e um sistema para controlar o dito dispositivo, de acordo com a invenção.
[010] A invenção será mais claramente compreendida a partir da seguinte descrição que se refere a uma realização preferencial fornecida a título de exemplo sem limitação e explicada em referência às figuras esquemáticas anexas, em que: - a Figura 1, já discutida, é uma figura que ilustra um sistema de controle de regulagem por meio de servocontrole em um ponto de ajuste de um parâmetro regulado de um dispositivo físico; - as Figuras 2, 3 e 4 são figuras que ilustram um sistema de controle de regulagem por meio de servocontrole em um ponto de ajuste de um parâmetro regulado de um dispositivo físico, de acordo com possíveis realizações da invenção; - as Figuras 5 a 9 são figuras que ilustram uma realização da invenção.
[011] Nas Figuras diferentes, os números de referência idênticos designam elementos similares ou equivalentes.
[012] Na presente descrição, módulo significa um conjunto de meios da técnica realizados para satisfazer a função do módulo. Tipicamente, essas são equações e cálculos aos quais as funções são ligadas e podem ser combinadas. A presente invenção é realizada por um computador e seus acessórios (memória, entrada/ saídas) que constituem a parte estrutural do sistema de controle de regulagem. Também, até o limite em que um modelo é refletido por um conjunto de equações, os termos função ou modelo de transferência poderiam ser usados de modo intercambiável para designar um modelo, embora o termo modelo implique a necessidade de considerar uma lei de operação de um sistema físico modelado pelo dito modelo.
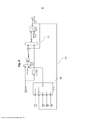
[013] A Figura 2 mostra o princípio de um sistema 1, de acordo com a invenção. Quanto à Figura 1, isso é um sistema de controle de regulagem 1 por meio de servocontrole em um ponto de ajuste Yc de um parâmetro regulado Y de um dispositivo físico 2.
[014] O sistema 1 compreende uma alça de regulagem que servocontrola o parâmetro regulado Y em um ponto de ajuste Yc controlando-se o dispositivo 2 pelo comando U. Essa alça de regulagem compreende um regulador 3 que libera o comando U e que insere a saída de um diferenciador 5 que libera a diferença entre uma alça de retorno 4 do parâmetro regulado Y e o ponto de ajuste Yc.
[015] O parâmetro regulado Y é administrado por uma lei de operação que liga o dito parâmetro regulado Y a um comando U e a uma pluralidade de parâmetros de entrada X1, X2, X3.... Essa lei de operação pode ser modelada por uma função de transferência F(p), o modelo matemático da relação entre o comando U, os parâmetros de entrada Xi e o parâmetro regulado Y.
[016] O regulador 3 é construído a partir de dois módulos em série: um corretor 6 com uma função de transferência C(p) e um módulo de compensação 7 da lei de operação com uma função de transferência F-1(p). Conforme apresentado, o corretor 6 e o módulo de compensação 7 são preferencialmente em série na passagem dianteira da alça de regulagem, com o corretor 6 a montante do módulo de compensação 7. Ainda, outras configurações são possíveis. O comando U corresponde à saída do regulador 3 e, por esse motivo, à saída do corretor 6 ou do módulo de compensação 7.
[017] A função de transferência F-1(p) do módulo de compensação 7 é o inverso da função de transferência F(p) que modela o dispositivo 2 e, por esse motivo, corresponde ao inverso do modelo da lei de operação. Por causa disso, visto que F-1(p)F(p)=1, o módulo de compensação compensa eficazmente a lei de operação. Isso é sobre correção pelo modelo inverso. Isso se destina a ser usado na inversão online de passagem de correção do modelo da lei de operação do dispositivo 2 de modo a compensar os polos e os zeros do processo bem como a estática de ganho. A inversão do modelo da lei de operação permite compensação teórica completa, mas depende de uma modelagem representativa da lei de operação. Por meio dessa compensação, o corretor 6 pode ser facilmente concebido, de modo a realizar a dinâmica e a precisão objetivada.
[018] Entretanto, a inversão da função de transferência do modelo da lei de operação precisa que a função de transferência seja inteiramente inversível, ou que os elementos não inversíveis sejam insignificantes. Como um resultado, alguns processos físicos são intrinsecamente não inversíveis, e também a modelagem pode revelar não linearidades para refletir melhor o processo real.
[019] Na verdade, na prática, a função de transferência F(p) que modela a lei de operação nunca é explícita. O engenheiro de automação, com frequência, tem um modelo de tipo de equação física com uma dependência do parâmetro regulado Y, não apenas no comando U, mas também em vários parâmetros de entrada Xi: Y = f(U,X1,X2,X2,...) em que Y, o parâmetro a ser regulado, ou seja, a saída liberada pelo modelo da lei de operação, U, o comando, e X1, X2, X3... são parâmetros de entrada que influenciam a lei de operação. O modelo da lei de operação pode ser determinado pelas relações físicas entre variáveis conhecidas diferentes, ou seja, por análise e/ou por identificação. A função de transferência F(p) é determinada a partir desse modelo para refletir sua operação.
[020] Em geral, o modelo da lei de operação compreende duas partes: uma parte estável e uma parte dinâmica. A parte estável do modelo da lei de operação combina as relações independentes de tempo entre o parâmetro regulado Y, o comando U e a pluralidade de parâmetros de entrada Xi. A parte dinâmica do modelo da lei de operação combina as relações dependentes de tempo entre o parâmetro regulado Y, o comando U e a pluralidade de parâmetros de entrada Xi.
[021] O modelo da lei de operação pode ser observado como: 𝑌 = (𝑈, 𝑋1, 𝑋2, 𝑋3, … ) ∙ 𝑓′(𝑈, 𝑋1, 𝑋2, 𝑋3, … ) K(U,X1,X2,X3,...) representa a parte estável, representativa da lei de operação em estado estável, ou seja, quando o comando U e a pluralidade de parâmetros de entrada Xi são constantes no tempo, por tempo suficientemente longo, de modo que os efeitos das fases transitórias sejam insignificantes. Desse modo, em estado estável: 𝑌 = (𝑈, 𝑋1, 𝑋2, 𝑋3, … )
[022] Os elementos da parte estável são determinados por identificação em estado estável ou por análise.
[023] f'(U,X1,X2,X3, ...) representa a parte dinâmica, representativa dos efeitos sobre a lei de operação de variações temporais do comando U e/ou da pluralidade de parâmetros de entrada Xi. Em estado estável: f(U,Xi,X2,X3,...) = 1
[024] Essa parte dinâmica 𝑓′(𝑝) pode ser escrita como uma função de transferência de ganho estático unitário: com ai, a2, bi, b2, ci, 02, ... parâmetros de função de entradas U, X1, X2, X3.... Os elementos da parte dinâmica são determinados por identificação em estado transitório ou por análise.
com ai, a2, bi, b2, ci, 02, ... parâmetros de função de entradas U, X1, X2, X3.... Os elementos da parte dinâmica são determinados por identificação em estado transitório ou por análise.
[025] O objetivo é reverter a função de transferência do modelo da lei de operação para alcançar F-1(p), de modo que F(p)-F-1(p)=1. A inversão da função de transferência do modelo da lei de operação não representa nenhum problema para o que é sua parte dinâmica:
[026] Mas, em relação à parte estável, pode ser difícil reverter a mesma quando a função K for complexa, contiver não linearidades e/ou depender consideravelmente dos parâmetros de entrada Xi.
[027] A solução é calcular um ganho local da parte estável de um modelo da lei de operação representativo do ganho ΔY do parâmetro regulado Y, em resposta a uma variação ΔU do comando U em um estado de operação estável da dita lei de operação:
[028] Esse cálculo é realizado por um módulo de determinação do ganho local, no núcleo do computador carregado com o controle do parâmetro regulado Y. O módulo de determinação do ganho local é configurado de modo que pelo menos com cada mudança do comando U e/ou dos parâmetros de entrada Xi, um novo ganho local seja determinado para refletir as ditas mudanças. Especificamente, o ganho local é calculado em tempo real, em cada etapa de tempo de cálculo do controle de regulagem para atualizar o dito ganho local.
[029] Deve ser observado que a inclusão da única inversão da parte estável alcança um ganho estático unitário para o conjunto de regulador e dispositivo, e a compensação da parte dinâmica não é sempre necessária. Esse é o caso, por exemplo, quando o sistema tem dinâmica rápida e linear; nesse caso, a regulagem do corretor 6 compensa facilmente a dinâmica, sem a necessidade de reverter a dinâmica do sistema.
[030] A Figura 3 mostra o arranjo desse módulo de determinação do ganho local 8 em um sistema similar àquele da Figura 2. O módulo de determinação do ganho local 8 recebe, na entrada, os parâmetros de entrada Xi, ou seja, X1, X2, X3, e o comando U, e libera o ganho local para o módulo de compensação 7 do regulador 3.
[031] Mais precisamente, o módulo de determinação do ganho local 8 calcula o ganho local a partir dos valores obtidos pelas saídas da parte estável de um modelo da lei de operação para pelo menos dois valores do comando separados U na conservação dos parâmetros de entrada constantes:
[032] Os dois valores do comando separados são separados no valor por uma diferença ΔU. Essa diferença ΔU é selecionada de maneira suficientemente pequena para permanecer no campo linear da parte estável da função de transferência do modelo da lei de operação, ou seja, é possível descarregar quaisquer não linearidades em torno do ponto de operação atual do sistema.
[033] A diferença ΔU entre os dois valores do comando separados U é preferencialmente de menos de 0,25% da faixa de variação no dito comando U, e/ou a diferença ΔU entre os dois valores do comando separados U corresponde a uma variação no dito comando U que causa uma variação ΔY no parâmetro regulado Y de menos de 1% da faixa de variação no dito parâmetro regulado Y. Até o limite em que isso está no campo linear da parte estável, a variação ΔY do parâmetro regulado pode ser aproximada por: ΔY = IK(U, X1, X-, X3,...) - K(U + ΔU, X1, X2, X3,... )|
[034] Uma vez que esse ganho local é determinado pelo módulo de determinação do ganho local 8, o mesmo é usado pelo módulo de compensação 7 da lei de operação. Mais precisamente, o módulo 7 envolve o inverso do ganho local. Em continuação às notações precedentes, o inverso da função de transferência do modelo da lei de operação pode ser escrito como:
[035] Visto que a função de transferência do módulo de compensação 7 foi preparada para compensar teoricamente a função de transferência do modelo do dispositivo 2, há F–1(p)∙F(p)=1
[036] A função de transferência C(p) do corretor 6 pode, por esse motivo, ser desenvolvida sem nenhuma consideração por não linearidades da lei de operação do dispositivo 2 a fim de garantir que a função de transferência de circuito fechado responda à necessidade de controle planejado. A função de transferência C(p) do corretor 6 pode ser selecionada, por exemplo, para admitir a integração na alça de regulagem e, por isso, garantir o apagamento do erro permanente no parâmetro regulado Y para o ponto de ajuste Yc do tipo de etapa. No caso, a escolha de ganho na função de transferência C(p) do corretor 6 controla a resposta de circuito fechado para satisfazer os requisitos de tempos de respostas, independentemente do comportamento do dispositivo, visto que sua lei de operação é compensada.
[037] Algumas funções de transferência do modelo da lei de operação podem ter recursos particulares a serem considerados. Esse é especialmente o caso quando o dispositivo 2 tem histerese. Esse é o caso, por exemplo, de válvulas pneumáticas.
[038] Com tal dispositivo 2 que tem histerese, durante a inversão da direção de comando U, o parâmetro regulado Y reage apenas depois que o comando percorreu a histerese. A partir do ponto de vista do corretor 3, isso corresponde a um ganho local que tende a 0, ou seja, no intervalo de histerese, a variação no comando U não produz nenhuma evolução do parâmetro regulado Y. Em outras palavras, no intervalo de histerese, o comando U não tem nenhum efeito sobre a saída, ou seja, o parâmetro regulado Y, proporcionado ao comando U, não está fora da histerese.
[039] Há, por esse motivo K(U,X1,X2,X3,...) - K(U + ΔU,XI,X2,X3, ...) = 0
[040] O ganho local é, por esse motivo, zero. Entretanto, o ganho local que é revertido para compensar o ganho da lei de operação do dispositivo 2, o ganho do módulo de compensação tende ao infinito, o que corresponde a um comando infinitamente grande U. Pode-se, por esse motivo, garantir que o módulo de determinação do ganho local seja configurado para liberar um valor de saturação predeterminado quando o ganho local calculado pelo dito módulo de determinação estiver abaixo de um valor predefinido, em valor absoluto.
[041] Esse valor de saturação evita uma exceção de software que causaria divisão por zero durante a inversão do ganho local. Posteriormente, esse valor de saturação é selecionado, tipicamente muito pequeno, de modo que, uma vez revertido, o mesmo maximize o comando gerado pelo regulador 3. Isso gera um comando rápido que permite o curso do intervalo de histerese em um curto período. O desempenho do controle é, por isso, aperfeiçoado, apesar da presença de histerese.
[042] Outro recurso particular que pode ser fatorado é, por exemplo, a presença de uma parte não inversível na função de transferência do modelo da lei de operação. Esse é, por exemplo, o caso para um atraso puro. Essa parte não inversível não pode ser compensada, mas sua inclusão no módulo de compensação 7 da lei de operação compensa a parte inversível do modelo da lei de operação.
[043] Em referência à Figura 4, essa mostra um exemplo de inclusão dessa parte não inversível no módulo de compensação 7. F1(p) é observada a parte inversível do modelo, F2(p) a parte não inversível e K a estática de ganho, de modo que F(p) = K • F1(p) • F2(p)
[044] a título de ilustração, a lei de operação seja modelada aqui por essa função de transferência adicionada à perturbações.
[045] O módulo de compensação 7 da lei de operação compreende, primeiro, uma compensação estática 70 que corresponde ao inverso do ganho local K, então, uma compensação dinâmica, a jusante da compensação estática 70, que compreende uma passagem dianteira 72 e uma passagem de retroalimentação 71 que constitui uma alça de retroalimentação. A passagem dianteira 72 compreende uma função de transferência que envolve o inverso da parte inversível do modelo da lei de operação. Essa reversão compensa a parte inversível do modelo da lei de operação. A função de transferência da passagem dianteira 72 também compreende uma função de transferência F‘1(p) que corresponde à dinâmica desejada para a função de transferência em circuito fechado. Desse modo, a função de transferência da passagem dianteira 72 corresponde a:
[046] A passagem de retroalimentação 71 compreende a função de transferência F2(p) que envolve a parte não inversível do modelo da lei de operação. A passagem de retroalimentação 71 também compreende a função de transferência F1(p) que corresponde à parte inversível do modelo da lei de operação. Desse modo, a função de transferência da passagem de retroalimentação 71 corresponde a F2(P\FI(P). A saída dessa passagem de retroalimentação 71 é somada na saída da compensação estática 70 para formar a entrada da passagem dianteira 72, da qual a saída é o comando U e é também a entrada da passagem de retroalimentação 71.
[047] O estudo da função de transferência de circuito fechado (CLTF) desse sistema de controle de regulagem revela suas vantagens. Calcular a CLTF fornece:
[048] Em um primeiro caso, F2(p)= 1, ou seja, F(p) é inteiramente inversível, o que corresponde a casos mencionados anteriormente. A seguinte CLTF é produzida:
[049] Se C(p)=1 é selecionada, o seguinte Y = F'-1(p) • Yc + pert • [1 - F‘1(p)]
[050] O corretor 6, por esse motivo, impõe a dinâmica desejada sobre a totalidade sem erro estático, e a perturbação pode ser eficazmente rejeitada selecionando-se uma dinâmica rápida para F‘1(p). O sistema é de particular interesse quando a parte não inversível é suficientemente modelável. Esse é o caso para um atraso puro.
[051] Se Tr for observado como o atraso, a função de transferência do atraso puro é expressa como: F2(p) = e-Tr p • F'1(p) • Yc + pert • [1 - e-Tr p • F'1(p)]
[052] Se o atraso for conhecido, o mesmo não afeta a estabilidade da CLTF. Entretanto, a rejeição da perturbação é afetada pelo atraso. Entretanto, no caso de atraso significativo, é interessante selecionar o corretor 6 de modo a aperfeiçoar a eficácia de rejeição.
[053] O seguinte exemplo sem limitação é fornecido no caso em que o dispositivo é uma turboélice, e o parâmetro regulado é a velocidade giratória do propulsor XNP, sendo que o comando é o passo do propulsor β. O comando β é identificado por Beta nas Figuras 6 a 9. O exemplo ilustra a aplicação da invenção para cálculo de F-1(p) em referência à Figura 3, que corresponde a uma possível realização da invenção.
[054] A Tabela 1 abaixo lista elementos diferentes envolvidos no modelo da lei de operação.
 TABELA 1
TABELA 1
[055] O modelo da lei de operação que liga β (ou Beta) a XNP é definido primeiro. Presumindo a expressão simplificada do corpo de potência que conecta XNP à diferença de Turbina de pressão baixa (LP) e torque de propulsor: entretanto,
entretanto, 
[056] Por esse motivo,
[057] O objetivo é revelar o termo potência:
[058] Isso é proposto
[059] O resultado é com Pwp (fornecido pelo fabricante do propulsor) de modo que
com Pwp (fornecido pelo fabricante do propulsor) de modo que 
[060] K2 seja mantido constante: com A91 o coeficiente de tração constante π
com A91 o coeficiente de tração constante π  e RCP91 o coeficiente de potência de propulsor definido pelo fabricante:
e RCP91 o coeficiente de potência de propulsor definido pelo fabricante:  sendo que RJ91 é o coeficiente de velocidade do ar (consultar tabela 1).
sendo que RJ91 é o coeficiente de velocidade do ar (consultar tabela 1).
[061] Por esse motivo,
[062] Um modelo da evolução da velocidade do propulsor de uma turboélice mostrada na Figura 5 é alcançado, em que o bloco 50 corresponde ao cálculo do produto da constante K2 pelo coeficiente de potência de propulsor RCP91. Esse produto é multiplicado pela velocidade giratória do propulsor Wp (OmegaP) previamente calculado, e elevado ao cubo. Uma alça de retorno 51 ilustra a inclusão da velocidade giratória do propulsor pelo bloco 50 e pela função cúbica. A potência absorvida pelo propulsor Pwp é alcançada como uma função do comando β, da medição da velocidade giratória do propulsor, por meio da alça de retorno 51, e parâmetros de entrada que compreendem a velocidade de avanço da aeronave VTAS, a pressão do ambiente PAMB e a temperatura do ambiente TAMB. Essa potência absorvida pelo propulsor Pwp é subtraída de outro parâmetro de entrada constituído pela potência liberada pela turbina de potência Pw49. Específicas para o exemplo ilustrado, e ligadas às unidades usadas, as unidades devem ser convertidas por certas magnitudes. Desse modo, os quilowatts de Pwp e Pw49 são convertidos em watts. O resultado é dividido pela velocidade WP, então, pela inércia total J_Tot. Esse resultado é, então, integrado inicializando-se com uma velocidade inicial XNPInic, convertida previamente de rpm em rad/s. O resultado depois da integração é a velocidade XNP, reconvertida de rad/s em rpm.
[063] Essa função de transferência é simplificada de modo a revelar um sistema de passa-baixo de ordem 1, representativo da dinâmica do propulsor, de onde a constante de tempo Tau_propulsor é variável como uma função de entradas e, por esse motivo, o ganho corresponde à parte estável da velocidade giratória XNP_Stab:
[064] A Figura 6 ilustra essa função de transferência modificada. Em relação à Figura 5, o desaparecimento da inclusão da velocidade giratória do propulsor é observado na saída do bloco 50, por meio da alça de retorno 51 e da função cúbica. Ao contrário, o produto da constante K2 pelo coeficiente de potência de propulsor RCP91 corresponde à potência absorvida pelo propulsor Pwp o que divide a potência liberada pela turbina de potência Pw49, e uma função de raiz cúbica é aplicada ao resultado para fornecer a parte estável da velocidade giratória XNP_Stab.
[065] A medição da velocidade giratória XNP é subtraída da parte estável da velocidade giratória XNP_Stab por meio de uma alça de retorno 52. O resultado é dividido por Tau_propulsor, então, integrado, inicializando-se com uma velocidade inicial XNPInic selecionada em zero, para fornecer a medição da velocidade giratória XNPmedição em rpm.
[066] A transformação da função de transferência isola a relação estabilizada entre as entradas e a velocidade giratória em XNP_Stab estável, a partir da relação transitória. A relação estável é calculada diretamente a partir do modelo transformado desse modo, mas a expressão analítica da constante de tempo do primeiro sistema de passa-baixo de ordem não é possível. A constante de tempo Tau_propulsor é aproximada, visto que é uma função de PW49 identificando-se a dinâmica de XNP por meio de métodos de identificação convencionais, tal como aplicação de um nível de potência entrada, e medindo se. Essa aproximação é suficientemente verdadeira para possibilitar a síntese de F-1(p) para controle do propulsor.
[067] O cálculo do ganho local é definido, conforme explicado anteriormente, calculando-se, a partir da parte estável do modelo, os valores de XNP para β atual e para β+Δβ. Por exemplo, Δβ=0.1° pode ser selecionado de modo a não se afastar do escopo de linearidade em torno do ponto de operação atual.
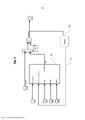
[068] A Figura 7 ilustra a implantação do cálculo do ganho local, tal como pode ser feito em um computador em tempo real. Isso, por esse motivo, refere-se ao módulo de determinação 8 do ganho local. Os dois blocos 81, 82, paralelamente, inserem a medição da velocidade giratória do propulsor WP (OmegaP), a velocidade de avanço da aeronave VTAS, a pressão do ambiente PAMB, a temperatura do ambiente TAMB e a potência liberada pela turbina de potência Pw49. O bloco 81 de cima, Modelo de Estática XNP1 observado, obtém β como comando, embora o bloco 82 de baixo, Modelo de Estática XNP2 observado, obtém β+Δβ como comando e, por esse motivo, libera dois valores de XNP, XNP1 e XNP2 observados. Esses são, por esse motivo, blocos que ilustram o modelo de estática da lei de operação. Depois de ter feito a diferença entre XNP1 e XNP2, e depois da divisão por Δβ, o resultado é o valor do ganho local, ganho local XNP observado vs Beta.
[069] A Figura 8 ilustra a parte estável do modelo da lei de operação esquematizada pelos blocos 81, 82 na Figura 7, nesse caso, aquela do bloco 81 de cima, que revela o bloco 50 mostrado na Figura 5. Isso é, na verdade, a parte estável da função de transferência ilustrada pela Figura 6: a parte dinâmica que envolve o Tau_Propulsor e o integrador foi apagada. A introdução de um atraso 80 de um passo de cálculo na alça de retorno 51 da medição do XNP também é observada, de modo que medir o passo de cálculo precedente seja considerado por substituição da integração.
[070] A compensação total do modelo da lei de operação que liga XNP a β é finalmente feita revertendo-se o ganho local e o filtro de passa-baixo de ordem 1 que corresponde à dinâmica do sistema, conforme ilustrado na Figura 9. Isso mostra o módulo de determinação 8 do ganho local K ilustrado pela Figura 7 e o módulo de compensação 7 da lei de operação por meio do filtro de passa-alto 73 que constitui o inverso da parte dinâmica (identificado em um passa-baixo) dividido pelo ganho local K determinado pelo módulo 8. Na entrada do primeiro filtro de passa-alto de ordem 73, ε é a diferença entre um ponto de ajuste de velocidade giratória XNP e a medição da velocidade giratória XNP. No filtro de passa-alto 73, a diferença é feita entre o ε atual e ε previamente calculado, simbolizado pelo atraso. Essa diferença é dividida por Ts, que representa uma parte da constante de tempo. O resultado é multiplicado por Tau_Propulsor, então, adicionado a ε. A saída do filtro de passa-alto 73 é dividida pelo ganho local K calculado pelo módulo 8, que resulta no comando β a ser aplicado.
[071] A invenção não se limita à realização descrita e mostrada nas Figuras anexas. As modificações ainda são possíveis, especialmente do ponto de vista da constituição de vários elementos ou por substituição de equivalentes da técnica, sem, como tal, que se afaste do escopo de proteção da invenção.
Claims (8)
1. SISTEMA (1) PARA CONTROLAR UM PARÂMETRO REGULADO (Y) DE UM DISPOSITIVO de equipamento aeronáutico (2), sendo que o parâmetro regulado é administrado por uma lei de operação do dispositivo de equipamento aeronáutico que liga o parâmetro regulado a um comando (u) e a uma pluralidade de parâmetros de entrada (x1, x2, x3, ...), sendo que a lei de operação é modelável por uma função de transferência que constitui um modelo matemático de uma relação entre o comando (U), os parâmetros de entrada (x1, x2, x3, .) e o parâmetro regulado (Y), sendo que o sistema de controle de regulagem compreende uma alça de regulagem que servocontrola o parâmetro regulado em um ponto de ajuste (yc) por meio do comando (U) que controla o dispositivo, caracterizado pela alça de regulagem compreender um regulador (3) que compreende, em série, um corretor (6) e um módulo de compensação (7) da lei de operação de onde a função de transferência é destinada a compensar a função de transferência da lei de operação, sendo que o comando (U) é liberado para o dispositivo de equipamento aeronáutico que corresponde a uma saída do regulador (3), em que o sistema compreende adicionalmente um módulo de determinação (8) de um ganho local que recebe o comando (U) e os parâmetros de entrada e é configurado para determinar o ganho local de uma parte estática de um modelo da lei de operação representativa do ganho do parâmetro regulado em resposta a uma variação no comando (U) em um estado de operação estável da lei de operação, sendo que a parte estática do modelo da lei de operação combina as relações independentes de tempo entre o parâmetro regulado (Y), o comando (U) e a pluralidade de parâmetros de entrada (X1, X2, X3, .), sendo que o modelo da lei de operação também compreende uma parte dinâmica que combina as relações dependentes de tempo entre o parâmetro regulado (Y), o comando (U) e a pluralidade de parâmetros de entrada (X1, X2, X3), sendo que o módulo de compensação da lei de operação envolve o inverso do ganho local determinado pelo módulo de determinação (8).
2. SISTEMA, de acordo com a reivindicação 1, caracterizado pelo ganho local ser calculado a partir dos valores obtidos pelas saídas de uma parte estática de um modelo da lei de operação para pelo menos dois valores do comando separados na conservação dos parâmetros de entrada constantes.
3. SISTEMA, de acordo com a reivindicação 2, caracterizado pela diferença entre os dois valores do comando separados ser de menos de 0,25% da faixa de variação no comando e/ou a diferença entre os dois valores do comando separados corresponde a uma variação no comando que causa uma variação no parâmetro regulado de menos de 1% da faixa de variação no parâmetro regulado.
4. SISTEMA, de acordo com qualquer uma das reivindicações 1 a 3, caracterizado pelo módulo de determinação (8) do ganho local ser configurado para liberar um valor de saturação predeterminado quando o ganho local calculado pelo módulo de determinação estiver abaixo de um valor predefinido.
5. SISTEMA, de acordo com qualquer uma das reivindicações 1 a 4, caracterizado pelo módulo de determinação (8) do ganho local ser configurado de modo que pelo menos, com cada mudança do comando U e/ou dos parâmetros de entrada, um novo ganho local seja determinado para refletir as mudanças.
6. SISTEMA, de acordo com qualquer uma das reivindicações 1 a 5, caracterizado pelo módulo de compensação (7) da lei de operação também compreender uma primeira função de transferência do inverso da parte dinâmica do modelo da lei de operação.
7. SISTEMA, de acordo com qualquer uma das reivindicações 1 a 6, caracterizado pelo modelo da lei de operação compreender uma parte inversível e uma parte não inversível, e o módulo de compensação (7) da lei de operação compreende uma compensação estática (70) que corresponde ao inverso do ganho local K e uma compensação dinâmica que compreende uma passagem dianteira (72) e uma passagem de retroalimentação (71) que constitui uma alça de retroalimentação, em que a passagem dianteira compreende uma segunda função de transferência que envolve o inverso da parte inversível do modelo da lei de operação e a passagem de retroalimentação compreende uma terceira função de transferência que envolve a parte não inversível do modelo da lei de operação.
8. CONJUNTO caracterizado por compreender um dispositivo e um sistema para controlar o dispositivo de equipamento aeronáutico, conforme definido em qualquer uma das reivindicações 1 a 7.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| FR1557808A FR3040220B1 (fr) | 2015-08-19 | 2015-08-19 | Systeme de regulation d'un parametre regule |
| FR1557808 | 2015-08-19 | ||
| PCT/FR2016/052090 WO2017029456A1 (fr) | 2015-08-19 | 2016-08-18 | Système de régulation d'un paramètre régulé |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| BR112018003049A2 BR112018003049A2 (pt) | 2018-10-02 |
| BR112018003049B1 true BR112018003049B1 (pt) | 2022-12-06 |
Family
ID=55361580
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| BR112018003049-0A BR112018003049B1 (pt) | 2015-08-19 | 2016-08-18 | Sistema para controlar um parâmetro regulado de um dispositivo e conjunto |
Country Status (8)
| Country | Link |
|---|---|
| US (1) | US10625873B2 (pt) |
| EP (1) | EP3338147B1 (pt) |
| CN (1) | CN107924163B (pt) |
| BR (1) | BR112018003049B1 (pt) |
| CA (1) | CA2995326C (pt) |
| FR (1) | FR3040220B1 (pt) |
| RU (1) | RU2713261C2 (pt) |
| WO (1) | WO2017029456A1 (pt) |
Families Citing this family (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US9922282B2 (en) * | 2015-07-21 | 2018-03-20 | Limitless Computing, Inc. | Automated readiness evaluation system (ARES) for use with an unmanned aircraft system (UAS) |
| FR3070056B1 (fr) * | 2017-08-09 | 2019-08-23 | Safran Aircraft Engines | Systeme mixte de commande de moteur d'aeronef et procede de reglage associe |
| US10961921B2 (en) * | 2018-09-19 | 2021-03-30 | Pratt & Whitney Canada Corp. | Model-based control system and method for a turboprop engine |
| US11803168B2 (en) | 2019-03-08 | 2023-10-31 | General Electric Company | Distributed control modules with cumulating command references |
| FR3096794B1 (fr) | 2019-05-29 | 2021-04-30 | Safran Aircraft Engines | Système et méthode de régulation d’un paramètre physique d’un système réel d’une turbomachine à partir d’un paramètre physique de consigne |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4755924A (en) * | 1985-02-19 | 1988-07-05 | Kabushiki Kaisha Toshiba | Process controller having an adjustment system with two degrees of freedom |
| US4980835A (en) * | 1988-10-13 | 1990-12-25 | United Technologies Corporation | Control law system for X-Wing aircraft |
| US6539290B1 (en) * | 1995-06-07 | 2003-03-25 | Dabulamanzi Holdings, Llc | Method, apparatus and design procedure for controlling multi-input, multi-output (MIMO) parameter dependent systems using feedback LTI'zation |
| US7418301B2 (en) * | 1996-05-06 | 2008-08-26 | Pavilion Technologies, Inc. | Method and apparatus for approximating gains in dynamic and steady-state processes for prediction, control, and optimization |
| KR100518456B1 (ko) | 2003-10-10 | 2005-09-30 | 학교법인 포항공과대학교 | 전력 증폭기의 선형화를 위한 디지털 피드백 선형화 장치및 방법 |
| DE102005004632B3 (de) * | 2004-10-01 | 2006-05-04 | Deutsches Zentrum für Luft- und Raumfahrt e.V. | Verfahren und Vorrichtung zur Steuerung oder Regelung von Prozessgrößen sowie zur näherungsweisen Inversion dynamischer Systeme |
| US8321104B2 (en) * | 2008-07-18 | 2012-11-27 | Rolls-Royce Plc | Control system |
| FR2942272B1 (fr) * | 2009-02-16 | 2011-05-06 | Snecma | Procede et systeme de regulation de turbine a gaz et turbine a gaz munie d'un tel systeme |
| US9004973B2 (en) * | 2012-10-05 | 2015-04-14 | Qfo Labs, Inc. | Remote-control flying copter and method |
| EP2763896B1 (en) * | 2012-11-15 | 2017-09-20 | SZ DJI Technology Co., Ltd. | A multi-rotor unmanned aerial vehicle |
| FR3007152B1 (fr) * | 2013-06-18 | 2015-07-03 | Snecma | Procede et systeme de recalage d'un modele numerique |
| CN103488814B (zh) * | 2013-08-16 | 2017-02-15 | 北京航空航天大学 | 一种适用于再入飞行器姿态控制的闭环仿真系统 |
| US9922282B2 (en) * | 2015-07-21 | 2018-03-20 | Limitless Computing, Inc. | Automated readiness evaluation system (ARES) for use with an unmanned aircraft system (UAS) |
| US10258888B2 (en) * | 2015-11-23 | 2019-04-16 | Qfo Labs, Inc. | Method and system for integrated real and virtual game play for multiple remotely-controlled aircraft |
| US10309330B2 (en) * | 2016-10-27 | 2019-06-04 | Rolls-Royce Corporation | Model reference adaptive controller |
-
2015
- 2015-08-19 FR FR1557808A patent/FR3040220B1/fr active Active
-
2016
- 2016-08-18 RU RU2018109104A patent/RU2713261C2/ru active
- 2016-08-18 WO PCT/FR2016/052090 patent/WO2017029456A1/fr active Application Filing
- 2016-08-18 EP EP16770040.0A patent/EP3338147B1/fr active Active
- 2016-08-18 CN CN201680048663.8A patent/CN107924163B/zh active Active
- 2016-08-18 US US15/752,628 patent/US10625873B2/en active Active
- 2016-08-18 BR BR112018003049-0A patent/BR112018003049B1/pt active IP Right Grant
- 2016-08-18 CA CA2995326A patent/CA2995326C/fr active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US20190031359A1 (en) | 2019-01-31 |
| RU2018109104A3 (pt) | 2020-01-09 |
| FR3040220B1 (fr) | 2018-04-20 |
| FR3040220A1 (fr) | 2017-02-24 |
| RU2713261C2 (ru) | 2020-02-04 |
| CN107924163A (zh) | 2018-04-17 |
| US10625873B2 (en) | 2020-04-21 |
| RU2018109104A (ru) | 2019-09-20 |
| BR112018003049A2 (pt) | 2018-10-02 |
| CN107924163B (zh) | 2021-02-19 |
| WO2017029456A1 (fr) | 2017-02-23 |
| CA2995326A1 (fr) | 2017-02-23 |
| EP3338147A1 (fr) | 2018-06-27 |
| EP3338147B1 (fr) | 2020-09-30 |
| CA2995326C (fr) | 2023-09-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| BR112018003049B1 (pt) | Sistema para controlar um parâmetro regulado de um dispositivo e conjunto | |
| Chen et al. | A novel nonlinear resilient control for a quadrotor UAV via backstepping control and nonlinear disturbance observer | |
| Sun et al. | Incremental nonlinear fault-tolerant control of a quadrotor with complete loss of two opposing rotors | |
| Chen et al. | Disturbance observer-based adaptive sliding mode control for near-space vehicles | |
| Yang et al. | Active vibration control of the axially moving string in the S domain | |
| Ahmadi et al. | Active fault-tolerant control of quadrotor UAVs with nonlinear observer-based sliding mode control validated through hardware in the loop experiments | |
| EP3316051B1 (en) | Model reference adaptive controller | |
| Niu et al. | Nonlinear fuzzy fault-tolerant control of hypersonic flight vehicle with parametric uncertainty and actuator fault | |
| US20190309689A1 (en) | Systems and methods for power turbine governing | |
| Hu et al. | Closed-loop based control allocation for spacecraft attitude stabilization with actuator faults | |
| Nazari et al. | Spacecraft attitude stabilization using nonlinear delayed multiactuator control and inverse dynamics | |
| Chen et al. | Nonlinear fault-tolerant control for hypersonic flight vehicle with multi-sensor faults | |
| Liu et al. | Design for aircraft engine multi-objective controllers with switching characteristics | |
| Stephan et al. | Precise tracking of extended three-dimensional dubins paths for fixed-wing aircraft | |
| Mahmood et al. | Robust H∞ autopilot design for agile missile with time-varying parameters | |
| Gong et al. | Prescribed-time extended state observer and prescribed performance control of quadrotor UAVs against actuator faults | |
| Nadda et al. | Improved quadrotor altitude control design using second-order sliding mode | |
| Saluru et al. | Fault tolerant model predictive control of a turbofan engine using C-MAPSS40k | |
| Lee et al. | Linear time-varying eigenstructure assignment with flight control application | |
| Tsai et al. | Regulation on radial position deviation for vertical AMB systems | |
| An et al. | Adaptive control of variable geometry inlet–configured air-breathing hypersonic vehicles | |
| Frasik et al. | Practical application of advanced control: An evaluation of control methods on a quanser aero | |
| Teimoori et al. | Planar trajectory tracking controller for a small-sized helicopter considering servos and delay constraints | |
| Neto et al. | A Novel Approach for Stall Prevention and Rotation Speed Limiting in a Min–Max Controller Structure | |
| Du et al. | Multivariable constrained predictive control and its application to a commercial turbofan engine |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| B06U | Preliminary requirement: requests with searches performed by other patent offices: procedure suspended [chapter 6.21 patent gazette] | ||
| B09A | Decision: intention to grant [chapter 9.1 patent gazette] | ||
| B16A | Patent or certificate of addition of invention granted [chapter 16.1 patent gazette] |
Free format text: PRAZO DE VALIDADE: 20 (VINTE) ANOS CONTADOS A PARTIR DE 18/08/2016, OBSERVADAS AS CONDICOES LEGAIS |