JP6890288B2 - 画像処理装置、画像表示システムおよび画像処理方法 - Google Patents
画像処理装置、画像表示システムおよび画像処理方法 Download PDFInfo
- Publication number
- JP6890288B2 JP6890288B2 JP2018062600A JP2018062600A JP6890288B2 JP 6890288 B2 JP6890288 B2 JP 6890288B2 JP 2018062600 A JP2018062600 A JP 2018062600A JP 2018062600 A JP2018062600 A JP 2018062600A JP 6890288 B2 JP6890288 B2 JP 6890288B2
- Authority
- JP
- Japan
- Prior art keywords
- image
- vehicle
- image processing
- face position
- face
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000003672 processing method Methods 0.000 title claims description 12
- 238000003384 imaging method Methods 0.000 claims description 51
- 238000001514 detection method Methods 0.000 claims description 35
- 238000010586 diagram Methods 0.000 claims description 24
- 238000000034 method Methods 0.000 claims description 14
- 230000007423 decrease Effects 0.000 claims description 5
- 239000002131 composite material Substances 0.000 description 21
- 230000004048 modification Effects 0.000 description 17
- 238000012986 modification Methods 0.000 description 17
- 238000004590 computer program Methods 0.000 description 4
- 230000003287 optical effect Effects 0.000 description 3
- 238000013459 approach Methods 0.000 description 2
- 230000015572 biosynthetic process Effects 0.000 description 2
- 230000002194 synthesizing effect Effects 0.000 description 2
- 238000001931 thermography Methods 0.000 description 2
- 125000002066 L-histidyl group Chemical group [H]N1C([H])=NC(C([H])([H])[C@](C(=O)[*])([H])N([H])[H])=C1[H] 0.000 description 1
- 230000004075 alteration Effects 0.000 description 1
- 230000006866 deterioration Effects 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 238000010191 image analysis Methods 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
Images










Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/70—Determining position or orientation of objects or cameras
- G06T7/73—Determining position or orientation of objects or cameras using feature-based methods
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R1/00—Optical viewing arrangements; Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles
- B60R1/12—Mirror assemblies combined with other articles, e.g. clocks
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R1/00—Optical viewing arrangements; Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles
- B60R1/02—Rear-view mirror arrangements
- B60R1/04—Rear-view mirror arrangements mounted inside vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R1/00—Optical viewing arrangements; Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles
- B60R1/20—Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles
- B60R1/22—Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles for viewing an area outside the vehicle, e.g. the exterior of the vehicle
- B60R1/23—Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles for viewing an area outside the vehicle, e.g. the exterior of the vehicle with a predetermined field of view
- B60R1/26—Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles for viewing an area outside the vehicle, e.g. the exterior of the vehicle with a predetermined field of view to the rear of the vehicle
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R1/00—Optical viewing arrangements; Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles
- B60R1/20—Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles
- B60R1/22—Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles for viewing an area outside the vehicle, e.g. the exterior of the vehicle
- B60R1/28—Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles for viewing an area outside the vehicle, e.g. the exterior of the vehicle with an adjustable field of view
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R11/00—Arrangements for holding or mounting articles, not otherwise provided for
- B60R11/04—Mounting of cameras operative during drive; Arrangement of controls thereof relative to the vehicle
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T1/00—General purpose image data processing
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/70—Determining position or orientation of objects or cameras
- G06T7/73—Determining position or orientation of objects or cameras using feature-based methods
- G06T7/74—Determining position or orientation of objects or cameras using feature-based methods involving reference images or patches
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/56—Context or environment of the image exterior to a vehicle by using sensors mounted on the vehicle
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/59—Context or environment of the image inside of a vehicle, e.g. relating to seat occupancy, driver state or inner lighting conditions
- G06V20/597—Recognising the driver's state or behaviour, e.g. attention or drowsiness
-
- G—PHYSICS
- G08—SIGNALLING
- G08G—TRAFFIC CONTROL SYSTEMS
- G08G1/00—Traffic control systems for road vehicles
- G08G1/16—Anti-collision systems
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04N—PICTORIAL COMMUNICATION, e.g. TELEVISION
- H04N7/00—Television systems
- H04N7/18—Closed-circuit television [CCTV] systems, i.e. systems in which the video signal is not broadcast
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60K—ARRANGEMENT OR MOUNTING OF PROPULSION UNITS OR OF TRANSMISSIONS IN VEHICLES; ARRANGEMENT OR MOUNTING OF PLURAL DIVERSE PRIME-MOVERS IN VEHICLES; AUXILIARY DRIVES FOR VEHICLES; INSTRUMENTATION OR DASHBOARDS FOR VEHICLES; ARRANGEMENTS IN CONNECTION WITH COOLING, AIR INTAKE, GAS EXHAUST OR FUEL SUPPLY OF PROPULSION UNITS IN VEHICLES
- B60K35/00—Instruments specially adapted for vehicles; Arrangement of instruments in or on vehicles
- B60K35/65—Instruments specially adapted for specific vehicle types or users, e.g. for left- or right-hand drive
- B60K35/658—Instruments specially adapted for specific vehicle types or users, e.g. for left- or right-hand drive the instruments being ergonomically adjustable to the user
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R1/00—Optical viewing arrangements; Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles
- B60R1/12—Mirror assemblies combined with other articles, e.g. clocks
- B60R2001/1215—Mirror assemblies combined with other articles, e.g. clocks with information displays
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R1/00—Optical viewing arrangements; Real-time viewing arrangements for drivers or passengers using optical image capturing systems, e.g. cameras or video systems specially adapted for use in or on vehicles
- B60R1/12—Mirror assemblies combined with other articles, e.g. clocks
- B60R2001/1253—Mirror assemblies combined with other articles, e.g. clocks with cameras, video cameras or video screens
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R2300/00—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle
- B60R2300/10—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the type of camera system used
- B60R2300/105—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the type of camera system used using multiple cameras
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R2300/00—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle
- B60R2300/20—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the type of display used
- B60R2300/202—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the type of display used displaying a blind spot scene on the vehicle part responsible for the blind spot
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R2300/00—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle
- B60R2300/30—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the type of image processing
- B60R2300/303—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the type of image processing using joined images, e.g. multiple camera images
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R2300/00—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle
- B60R2300/60—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by monitoring and displaying vehicle exterior scenes from a transformed perspective
- B60R2300/602—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by monitoring and displaying vehicle exterior scenes from a transformed perspective with an adjustable viewpoint
- B60R2300/605—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by monitoring and displaying vehicle exterior scenes from a transformed perspective with an adjustable viewpoint the adjustment being automatic
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R2300/00—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle
- B60R2300/80—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the intended use of the viewing arrangement
- B60R2300/802—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the intended use of the viewing arrangement for monitoring and displaying vehicle exterior blind spot views
- B60R2300/8026—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the intended use of the viewing arrangement for monitoring and displaying vehicle exterior blind spot views in addition to a rear-view mirror system
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R2300/00—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle
- B60R2300/80—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the intended use of the viewing arrangement
- B60R2300/8046—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the intended use of the viewing arrangement for replacing a rear-view mirror system
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R2300/00—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle
- B60R2300/80—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the intended use of the viewing arrangement
- B60R2300/8066—Details of viewing arrangements using cameras and displays, specially adapted for use in a vehicle characterised by the intended use of the viewing arrangement for monitoring rearward traffic
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/20—Special algorithmic details
- G06T2207/20112—Image segmentation details
- G06T2207/20132—Image cropping
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30196—Human being; Person
- G06T2207/30201—Face
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30248—Vehicle exterior or interior
- G06T2207/30252—Vehicle exterior; Vicinity of vehicle
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30248—Vehicle exterior or interior
- G06T2207/30268—Vehicle interior
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Mechanical Engineering (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Chemical & Material Sciences (AREA)
- Combustion & Propulsion (AREA)
- Transportation (AREA)
- Signal Processing (AREA)
- Closed-Circuit Television Systems (AREA)
- Image Processing (AREA)
- Traffic Control Systems (AREA)
- Image Analysis (AREA)
Description
本発明の他の一態様に係る画像処理装置は、車両の後方を撮像する向きで前記車両に配置されている撮像装置により撮像された第1画像を前記撮像装置から取得する取得部と、運転手の顔位置を検出する位置検出部と、前記位置検出部により検出された前記顔位置に応じて、前記第1画像を含む対象画像のうち当該顔位置に対応する範囲を切り出すと共に、切り出すことにより得られた第2画像の前記顔位置に対応する位置に前記車両の位置を示す位置画像を重畳する画像処理を行い、画像処理後の第3画像を出力する画像処理部と、を備え、前記位置画像は、前記第2画像よりも小さい画像であり、前記運転手よりも後ろの位置にある前記車両の装備品を示す模式図である。
本発明の他の一態様に係る画像処理装置は、車両の後方を撮像する向きで前記車両に配置されている撮像装置により撮像された第1画像を前記撮像装置から取得する取得部と、運転手の顔位置を検出する位置検出部と、前記位置検出部により検出された前記顔位置に応じて、前記第1画像を含む対象画像のうち当該顔位置に対応する範囲を切り出すと共に、切り出すことにより得られた第2画像の前記顔位置に対応する位置に前記車両の位置を示す位置画像を重畳する画像処理を行い、画像処理後の第3画像を出力する画像処理部と、前記車両から所定の距離以内の位置に後続車両が位置するか否かを判定する判定部と、を備え、前記画像処理部は、前記所定の距離以内の位置に前記後続車両が位置したと前記判定部により判定された場合、前記画像処理において前記位置画像の重畳をしない。
本発明者は、「背景技術」の欄において記載した、画像表示装置に関し、以下の問題が生じることを見出した。
実施の形態に係る画像表示システムについて説明する。
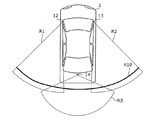
図1は、実施の形態に係る車両の一例を示す模式図である。図2は、実施の形態に係る画像表示システムの機能構成の一例を示すブロック図である。図3は、実施の形態に係る撮像装置により撮像される車両後方における撮像範囲を説明するための図である。図4は、実施の形態に係る画像処理装置による画像処理前後、および、画像処理過程の画像を示す説明図である。
次に、画像表示システム100の動作について説明する。
本実施の形態に係る画像処理装置10は、取得部101と、位置検出部102と、画像処理部103とを備える。取得部101は、車両1の後方を撮像する向きで車両1に配置されている撮像装置12〜14により撮像された画像51〜53を撮像装置12〜14から取得する。位置検出部102は、運転手U1の顔位置を検出する。画像処理部103は、位置検出部102により検出された顔位置に応じて、画像51〜53を合成した合成画像50のうち当該顔位置P1に対応する範囲71を切り出すと共に、切り出すことにより得られた画像54の顔位置P1に対応する位置P11に車両1の位置を示す位置画像80を重畳する画像処理を行い、画像処理後の画像60(または画像61)を出力する。
[4−1.変形例1]
変形例1に係る画像処理装置について説明する。
変形例2に係る画像処理装置について説明する。
上記実施の形態およびその変形例1、2に係る画像表示システム100、100Aは、複数の撮像装置12〜14を備える構成としたが、これに限らずに、1つの撮像装置を備える構成としてもよい。
上記実施の形態では、位置検出部102は、撮像部30を有し、撮像部30により得られた画像に顔認識処理を実行することで表示装置40に対する運転手の顔位置を特定するとしたが、これに限るものではない。例えば、位置検出部は、デプスセンサを有し、デプスセンサが検出した結果を用いて運転手の顔位置を特定してもよい。また、位置検出部は、サーモグラフィを有し、サーモグラフィが検出した結果を用いて運転手の顔位置を特定してもよい。
10、10A 画像処理装置
12〜14 撮像装置
21 運転席
22 ステアリングホイール
30 撮像部
40 表示装置
50 合成画像
51〜55、60、61 画像
71、72 範囲
80 位置画像
100、100A 画像表示システム
101 取得部
102 位置検出部
103、103A 画像処理部
104 記憶部
105 判定部
D1、D2 方向
d1 第1距離
d2 第2距離
P1、P2、P3、P11、P12、P21、P22 位置
R1、R2、R3、R10 撮像範囲
U1 運転手
θ10、θ11、θ20 角度範囲
Claims (12)
- 車両の後方を撮像する向きで前記車両に配置されている撮像装置により撮像された第1画像を前記撮像装置から取得する取得部と、
運転手の顔位置を検出する位置検出部と、
前記位置検出部により検出された前記顔位置に応じて、前記第1画像を含む対象画像のうち当該顔位置に対応する範囲を切り出すと共に、切り出すことにより得られた第2画像の前記顔位置に対応する位置に前記車両の位置を示す位置画像を重畳する画像処理を行い、画像処理後の第3画像を出力する画像処理部と、を備え、
前記画像処理部は、前記位置検出部が検出した前記顔位置が前記車両の左右方向の一方側に移動していた場合、前記対象画像から前記第2画像を切り出す範囲を前記顔位置が移動する前の範囲よりも前記車両の左右方向の他方側に移動させ、前記位置画像を重畳させる位置を前記顔位置が移動する前の位置よりも前記車両の左右方向の一方側に移動させる
画像処理装置。 - 前記画像処理部は、前記車両の車室内に配置されている表示装置の表示面をミラーと仮定したときに、当該表示面を介して、前記位置検出部により検出された前記顔位置において前記運転手が見ることができると推定される範囲を、前記対象画像から切り出す
請求項1に記載の画像処理装置。 - 前記画像処理部は、前記顔位置が移動した場合に、前記位置画像を重畳させる位置を移動させる第1距離を、前記第2画像を前記対象画像から切り出す前記範囲を移動させる第2距離よりも長くする
請求項1に記載の画像処理装置。 - 車両の後方を撮像する向きで前記車両に配置されている撮像装置により撮像された第1画像を前記撮像装置から取得する取得部と、
運転手の顔位置を検出する位置検出部と、
前記位置検出部により検出された前記顔位置に応じて、前記第1画像を含む対象画像のうち当該顔位置に対応する範囲を切り出すと共に、切り出すことにより得られた第2画像の前記顔位置に対応する位置に前記車両の位置を示す位置画像を重畳する画像処理を行い、画像処理後の第3画像を出力する画像処理部と、を備え、
前記位置画像は、前記第2画像よりも小さい画像であり、前記運転手よりも後ろの位置にある前記車両の装備品を示す模式図である
画像処理装置。 - 前記画像処理部は、所定の入力に応じて前記位置画像の透明度を変更する
請求項1から4のいずれか1項に記載の画像処理装置。 - さらに、
前記車両周辺の照度を検出する照度センサを備え、
前記所定の入力は、前記照度センサにより検出された前記照度であり、
前記画像処理部は、前記照度が小さいほど前記透明度を大きくする
請求項5に記載の画像処理装置。 - さらに、
互いに異なる複数種類の前記位置画像を記憶している記憶部を備え、
前記画像処理部は、前記記憶部に記憶されている前記複数種類の位置画像のうちの、予め選択された1以上の位置画像を前記第2画像に重畳する
請求項1から6のいずれか1項に記載の画像処理装置。 - 車両の後方を撮像する向きで前記車両に配置されている撮像装置により撮像された第1画像を前記撮像装置から取得する取得部と、
運転手の顔位置を検出する位置検出部と、
前記位置検出部により検出された前記顔位置に応じて、前記第1画像を含む対象画像のうち当該顔位置に対応する範囲を切り出すと共に、切り出すことにより得られた第2画像の前記顔位置に対応する位置に前記車両の位置を示す位置画像を重畳する画像処理を行い、画像処理後の第3画像を出力する画像処理部と、
前記車両から所定の距離以内の位置に後続車両が位置するか否かを判定する判定部と、を備え、
前記画像処理部は、前記所定の距離以内の位置に前記後続車両が位置したと前記判定部により判定された場合、前記画像処理において前記位置画像の重畳をしない
画像処理装置。 - 請求項1から8のいずれか1項に記載の画像処理装置と、
前記撮像装置と、
前記画像処理装置により出力された前記第3画像を表示する表示装置と、を備える
画像表示システム。 - 車両の後方を撮像する向きで前記車両に配置されている撮像装置により撮像された第1画像を前記撮像装置から取得し、
運転手の顔位置を検出し、
検出された前記顔位置に応じて、前記第1画像を含む対象画像のうち当該顔位置に対応する範囲を切り出すと共に、切り出すことにより得られた第2画像の前記顔位置に対応する位置に前記車両の位置を示す位置画像を重畳し、
前記顔位置が前記車両の左右方向の一方側に移動していた場合、前記対象画像から前記第2画像を切り出す範囲を前記顔位置が移動する前の範囲よりも前記車両の左右方向の他方側に移動させ、前記位置画像を重畳させる位置を前記顔位置が移動する前の位置よりも前記車両の左右方向の一方側に移動させる画像処理を行い、
画像処理後の第3画像を出力する
画像処理方法。 - 車両の後方を撮像する向きで前記車両に配置されている撮像装置により撮像された第1画像を前記撮像装置から取得し、
運転手の顔位置を検出し、
検出された前記顔位置に応じて、前記第1画像を含む対象画像のうち当該顔位置に対応する範囲を切り出すと共に、切り出すことにより得られた第2画像の前記顔位置に対応する位置に前記車両の位置を示す位置画像であって、前記第2画像よりも小さい画像であり、前記運転手よりも後ろの位置にある前記車両の装備品を示す模式図である前記位置画像を重畳する画像処理を行い、
画像処理後の第3画像を出力する
画像処理方法。 - 車両の後方を撮像する向きで前記車両に配置されている撮像装置により撮像された第1画像を前記撮像装置から取得し、
運転手の顔位置を検出し、
検出された前記顔位置に応じて、前記第1画像を含む対象画像のうち当該顔位置に対応する範囲を切り出すと共に、切り出すことにより得られた第2画像の前記顔位置に対応する位置に前記車両の位置を示す位置画像を重畳する画像処理を行い、
前記車両から所定の距離以内の位置に後続車両が位置するか否かを判定し、
前記画像処理では、前記所定の距離以内の位置に前記後続車両が位置したと判定された場合、前記画像処理において前記位置画像の重畳をしない
画像処理方法。
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018062600A JP6890288B2 (ja) | 2018-03-28 | 2018-03-28 | 画像処理装置、画像表示システムおよび画像処理方法 |
| DE112018007360.2T DE112018007360T5 (de) | 2018-03-28 | 2018-10-26 | Bildverarbeitungsvorrichtung, Bildanzeigesystem und Bildverarbeitungsverfahren |
| PCT/JP2018/039984 WO2019187283A1 (ja) | 2018-03-28 | 2018-10-26 | 画像処理装置、画像表示システムおよび画像処理方法 |
| US16/992,691 US11034305B2 (en) | 2018-03-28 | 2020-08-13 | Image processing device, image display system, and image processing method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018062600A JP6890288B2 (ja) | 2018-03-28 | 2018-03-28 | 画像処理装置、画像表示システムおよび画像処理方法 |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2019175133A JP2019175133A (ja) | 2019-10-10 |
| JP2019175133A5 JP2019175133A5 (ja) | 2020-05-21 |
| JP6890288B2 true JP6890288B2 (ja) | 2021-06-18 |
Family
ID=68061066
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2018062600A Active JP6890288B2 (ja) | 2018-03-28 | 2018-03-28 | 画像処理装置、画像表示システムおよび画像処理方法 |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US11034305B2 (ja) |
| JP (1) | JP6890288B2 (ja) |
| DE (1) | DE112018007360T5 (ja) |
| WO (1) | WO2019187283A1 (ja) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP7147255B2 (ja) * | 2018-05-11 | 2022-10-05 | トヨタ自動車株式会社 | 画像表示装置 |
| JP7484722B2 (ja) * | 2018-12-11 | 2024-05-16 | ソニーグループ株式会社 | 画像処理装置、画像処理方法および画像処理システム |
| US20200294194A1 (en) * | 2019-03-11 | 2020-09-17 | Nvidia Corporation | View synthesis using neural networks |
| CN110956134B (zh) * | 2019-11-29 | 2023-08-25 | 华人运通(上海)云计算科技有限公司 | 人脸识别方法、装置、设备以及计算机可读存储介质 |
Family Cites Families (25)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6891563B2 (en) * | 1996-05-22 | 2005-05-10 | Donnelly Corporation | Vehicular vision system |
| JP4364471B2 (ja) * | 2001-12-28 | 2009-11-18 | 株式会社エクォス・リサーチ | 車両の画像処理装置 |
| JP4323377B2 (ja) * | 2004-05-24 | 2009-09-02 | オリンパス株式会社 | 画像表示装置 |
| JP4855158B2 (ja) * | 2006-07-05 | 2012-01-18 | 本田技研工業株式会社 | 運転支援装置 |
| JP5088669B2 (ja) * | 2007-03-23 | 2012-12-05 | 株式会社デンソー | 車両周辺監視装置 |
| JP5118605B2 (ja) * | 2008-10-30 | 2013-01-16 | クラリオン株式会社 | 車両周辺画像表示システム |
| JP2010128794A (ja) * | 2008-11-27 | 2010-06-10 | Aisin Seiki Co Ltd | 車両周辺認知支援装置 |
| EP2789505B1 (en) * | 2011-12-09 | 2017-06-28 | Nissan Motor Company, Limited | Video display mirror and video display mirror system |
| JP5321711B2 (ja) | 2012-04-23 | 2013-10-23 | 日産自動車株式会社 | 車両用周辺監視装置および映像表示方法 |
| JP6364702B2 (ja) | 2013-03-29 | 2018-08-01 | アイシン精機株式会社 | 画像表示制御装置、画像表示システム、および表示ユニット |
| JP5562498B1 (ja) * | 2014-03-04 | 2014-07-30 | サカエ理研工業株式会社 | ルームミラー及びそのルームミラーを用いた車両死角支援装置並びにそのルームミラー又は車両死角支援装置の表示画像の調整方法 |
| JP6586090B2 (ja) * | 2014-08-07 | 2019-10-02 | 株式会社半導体エネルギー研究所 | 運転支援システム |
| DE102015002923B4 (de) * | 2015-03-06 | 2023-01-12 | Mekra Lang Gmbh & Co. Kg | Anzeigeeinrichtung für ein Fahrzeug insbesondere Nutzfahrzeug |
| JP2016195301A (ja) * | 2015-03-31 | 2016-11-17 | パナソニックIpマネジメント株式会社 | 画像処理装置、および、電子ミラーシステム |
| EP3246664A3 (en) * | 2016-05-19 | 2018-02-14 | Ricoh Company, Ltd. | Information processing system and information display apparatus |
| US10654422B2 (en) * | 2016-08-29 | 2020-05-19 | Razmik Karabed | View friendly monitor systems |
| JP6643969B2 (ja) * | 2016-11-01 | 2020-02-12 | 矢崎総業株式会社 | 車両用表示装置 |
| JP6626817B2 (ja) * | 2016-11-30 | 2019-12-25 | 京セラ株式会社 | カメラモニタシステム、画像処理装置、車両及び画像処理方法 |
| US10518702B2 (en) * | 2017-01-13 | 2019-12-31 | Denso International America, Inc. | System and method for image adjustment and stitching for tractor-trailer panoramic displays |
| JP6665819B2 (ja) * | 2017-03-17 | 2020-03-13 | トヨタ自動車株式会社 | 車載表示装置 |
| WO2019017198A1 (ja) * | 2017-07-19 | 2019-01-24 | 株式会社デンソー | 車両用表示装置及び表示制御装置 |
| US20200210733A1 (en) * | 2017-08-22 | 2020-07-02 | Seeing Machines Limited | Enhanced video-based driver monitoring using phase detect sensors |
| US11645840B2 (en) * | 2017-08-31 | 2023-05-09 | Sony Corporation | Information processing apparatus, information processing method, program, and moving body |
| JP2019067220A (ja) * | 2017-10-02 | 2019-04-25 | シャープ株式会社 | 駐車位置表示処理装置、駐車位置表示方法、およびプログラム |
| JP7283059B2 (ja) * | 2018-11-28 | 2023-05-30 | 株式会社アイシン | 周辺監視装置 |
-
2018
- 2018-03-28 JP JP2018062600A patent/JP6890288B2/ja active Active
- 2018-10-26 DE DE112018007360.2T patent/DE112018007360T5/de active Pending
- 2018-10-26 WO PCT/JP2018/039984 patent/WO2019187283A1/ja active Application Filing
-
2020
- 2020-08-13 US US16/992,691 patent/US11034305B2/en active Active
Also Published As
| Publication number | Publication date |
|---|---|
| US20200369207A1 (en) | 2020-11-26 |
| US11034305B2 (en) | 2021-06-15 |
| WO2019187283A1 (ja) | 2019-10-03 |
| JP2019175133A (ja) | 2019-10-10 |
| DE112018007360T5 (de) | 2021-01-14 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6890288B2 (ja) | 画像処理装置、画像表示システムおよび画像処理方法 | |
| WO2017069191A1 (ja) | キャリブレーション装置、キャリブレーション方法、及び、キャリブレーションプログラム | |
| US9025819B2 (en) | Apparatus and method for tracking the position of a peripheral vehicle | |
| JP6095985B2 (ja) | 再生装置、再生システム、再生方法及びプログラム | |
| JP5093611B2 (ja) | 車両周辺確認装置 | |
| JP6548900B2 (ja) | 画像生成装置、画像生成方法及びプログラム | |
| JP6730614B2 (ja) | 車両用表示制御装置、車両用表示システム、車両用表示制御方法およびプログラム | |
| JP2010287163A (ja) | 車載用画像表示装置および画像のトリミング方法 | |
| US11794667B2 (en) | Image processing apparatus, image processing method, and image processing system | |
| JP2006044596A (ja) | 車両用表示装置 | |
| US20230191994A1 (en) | Image processing apparatus, image processing method, and image processing system | |
| US11987182B2 (en) | Image processing apparatus, image processing method, and image processing system | |
| KR101964864B1 (ko) | 차량의 어라운드 뷰 영상의 왜곡 보정 방법 | |
| JP5299101B2 (ja) | 周辺表示装置 | |
| KR101278654B1 (ko) | 차량의 주변 영상 디스플레이 장치 및 방법 | |
| JPWO2019216087A1 (ja) | 画像処理装置、移動装置、および方法、並びにプログラム | |
| JP2005269010A (ja) | 画像生成装置、画像生成プログラム、及び画像生成方法 | |
| US20220030178A1 (en) | Image processing apparatus, image processing method, and image processing system | |
| KR20180094717A (ko) | Avm을 이용한 운전 지원 장치 및 시스템 | |
| JP4945315B2 (ja) | 運転支援システム及び車両 | |
| JP2020113066A (ja) | 映像処理装置、映像処理方法、およびプログラム | |
| JP2009006968A (ja) | 車両用表示装置 | |
| JP4696825B2 (ja) | 車両用死角映像表示装置 | |
| JPH0963000A (ja) | 車両搭載用映像装置 | |
| JP6136748B2 (ja) | 2次元3次元表示装置 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20200408 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20200408 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20210427 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20210506 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 6890288 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| S111 | Request for change of ownership or part of ownership |
Free format text: JAPANESE INTERMEDIATE CODE: R313113 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| SZ03 | Written request for cancellation of trust registration |
Free format text: JAPANESE INTERMEDIATE CODE: R313Z03 |