JP5785538B2 - 腹腔鏡手術用のロボットシステム - Google Patents
腹腔鏡手術用のロボットシステム Download PDFInfo
- Publication number
- JP5785538B2 JP5785538B2 JP2012511310A JP2012511310A JP5785538B2 JP 5785538 B2 JP5785538 B2 JP 5785538B2 JP 2012511310 A JP2012511310 A JP 2012511310A JP 2012511310 A JP2012511310 A JP 2012511310A JP 5785538 B2 JP5785538 B2 JP 5785538B2
- Authority
- JP
- Japan
- Prior art keywords
- support structure
- robot system
- arm
- instrument
- arms
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
- 238000002357 laparoscopic surgery Methods 0.000 title claims description 6
- 230000002401 inhibitory effect Effects 0.000 claims 1
- 238000001356 surgical procedure Methods 0.000 description 9
- 230000007246 mechanism Effects 0.000 description 7
- 238000002324 minimally invasive surgery Methods 0.000 description 4
- 210000001015 abdomen Anatomy 0.000 description 2
- 210000000683 abdominal cavity Anatomy 0.000 description 2
- 230000008859 change Effects 0.000 description 2
- 238000010586 diagram Methods 0.000 description 2
- 238000006073 displacement reaction Methods 0.000 description 2
- 238000000034 method Methods 0.000 description 2
- 210000000056 organ Anatomy 0.000 description 2
- 230000035515 penetration Effects 0.000 description 2
- 238000002432 robotic surgery Methods 0.000 description 2
- 239000000725 suspension Substances 0.000 description 2
- 125000002066 L-histidyl group Chemical group [H]N1C([H])=NC(C([H])([H])[C@](C(=O)[*])([H])N([H])[H])=C1[H] 0.000 description 1
- 238000007675 cardiac surgery Methods 0.000 description 1
- 238000004891 communication Methods 0.000 description 1
- 230000008878 coupling Effects 0.000 description 1
- 238000010168 coupling process Methods 0.000 description 1
- 238000005859 coupling reaction Methods 0.000 description 1
- 238000001514 detection method Methods 0.000 description 1
- 239000012636 effector Substances 0.000 description 1
- 238000003780 insertion Methods 0.000 description 1
- 230000037431 insertion Effects 0.000 description 1
- 210000001835 viscera Anatomy 0.000 description 1
Images



Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
- A61B34/37—Master-slave robots
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/00147—Holding or positioning arrangements
- A61B1/00149—Holding or positioning arrangements using articulated arms
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/313—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor for introducing through surgical openings, e.g. laparoscopes
- A61B1/3132—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor for introducing through surgical openings, e.g. laparoscopes for laparoscopy
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B17/00—Surgical instruments, devices or methods, e.g. tourniquets
- A61B17/02—Surgical instruments, devices or methods, e.g. tourniquets for holding wounds open; Tractors
- A61B17/0218—Surgical instruments, devices or methods, e.g. tourniquets for holding wounds open; Tractors for minimally invasive surgery
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B34/00—Computer-aided surgery; Manipulators or robots specially adapted for use in surgery
- A61B34/30—Surgical robots
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J17/00—Joints
- B25J17/02—Wrist joints
- B25J17/0283—Three-dimensional joints
- B25J17/0291—Three-dimensional joints having axes crossing at an oblique angle, i.e. other than 90 degrees
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Engineering & Computer Science (AREA)
- Animal Behavior & Ethology (AREA)
- Veterinary Medicine (AREA)
- Biomedical Technology (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Robotics (AREA)
- Physics & Mathematics (AREA)
- Biophysics (AREA)
- Optics & Photonics (AREA)
- Pathology (AREA)
- Radiology & Medical Imaging (AREA)
- Mechanical Engineering (AREA)
- Manipulator (AREA)
- Surgical Instruments (AREA)
- Endoscopes (AREA)
Description
Claims (6)
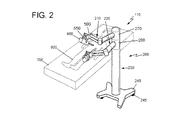
- 支持構造体(230)を備えた腹腔鏡手術用のロボットシステム(200)であって、前記支持構造体(230)は前記支持構造体(230)に摺動式に装着されて蝶番により取り付けられた少なくとも2つのアーム(210、220)を含み、前記アーム(210;220)が蝶番により互いに取り付けられた第1部材(300)と第2部材(400)とを備えており、前記第1部材(300)が前記支持構造体(230)に蝶番により回転可能に取り付けられているもので、前記第1部材(300)が前記第1部材(300)の長手軸(L1)を中心として回転するように構成されており、前記第2部材(400)が、器具(900)を装着するために少なくとも2の自由度を有する継手(550)を受けるように構成され、前記アーム(210、220)が、前記支持構造体(230)の長手軸(L3)の周りに互いに独立して回転するように構成されていて、前記アーム(210、220)が互いに阻害せずに前記支持構造体(230)の周りにフル旋回で回転されうるように、互いに対して及び前記支持構造体(230)に対して回転可能に設置され互いに異なった高さに配置された、それぞれ対応する第1及び第2の上部(260、270)を伴い、前記第1及び第2の上部(260、270)は前記アーム(210、220)の高さを独立に調節するために垂直に摺動することができる、ロボットシステム(200)。
- 前記第1部材(300)の前記長手軸(L1)が、前記第1部材(300)と前記第2部材(400)とを互いに接続する接合軸(L2)に少なくとも概ね直交している、請求項1に記載のロボットシステム(200)。
- 器具(900)を装着するために少なくとも2の自由度を有する前記継手(550)がジンバル式継手である、請求項2に記載のロボットシステム(200)。
- 前記第2部材(400)が、前記アームの第1部材(300)が蝶番により取り付けられている2つの部品(410、420)からなっている、請求項3に記載のロボットシステム(200)。
- 前記第1部材(300)が、前記支持構造体(230)と一体式の延長部(265;275)に回転可能に装着されている、請求項4に記載のロボットシステム(200)。
- 前記支持構造体(230)が垂直の柱を備えており、前記垂直の柱の長手軸(L3)を中心として前記アーム(210、220)が回転できる、請求項1に記載のロボットシステム(200)。
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| ES200901313A ES2388029B1 (es) | 2009-05-22 | 2009-05-22 | Sistema robótico para cirugia laparoscópica. |
| ESP200901313 | 2009-05-22 | ||
| PCT/ES2010/000224 WO2010133733A1 (es) | 2009-05-22 | 2010-05-20 | Sistema robótico para cirugía laparoscópica |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2012527276A JP2012527276A (ja) | 2012-11-08 |
| JP2012527276A5 JP2012527276A5 (ja) | 2013-06-20 |
| JP5785538B2 true JP5785538B2 (ja) | 2015-09-30 |
Family
ID=43125780
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2012511310A Active JP5785538B2 (ja) | 2009-05-22 | 2010-05-20 | 腹腔鏡手術用のロボットシステム |
Country Status (16)
| Country | Link |
|---|---|
| US (1) | US9119653B2 (ja) |
| EP (1) | EP2433585B1 (ja) |
| JP (1) | JP5785538B2 (ja) |
| KR (1) | KR101665744B1 (ja) |
| CN (1) | CN102458295B (ja) |
| AU (1) | AU2010251107B2 (ja) |
| BR (1) | BRPI1011053B8 (ja) |
| CA (1) | CA2762780C (ja) |
| ES (2) | ES2388029B1 (ja) |
| IL (1) | IL216470A0 (ja) |
| MX (1) | MX336487B (ja) |
| PL (1) | PL2433585T3 (ja) |
| RU (1) | RU2531469C2 (ja) |
| SG (1) | SG176183A1 (ja) |
| WO (1) | WO2010133733A1 (ja) |
| ZA (1) | ZA201109443B (ja) |
Families Citing this family (199)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8219178B2 (en) | 2007-02-16 | 2012-07-10 | Catholic Healthcare West | Method and system for performing invasive medical procedures using a surgical robot |
| US10653497B2 (en) | 2006-02-16 | 2020-05-19 | Globus Medical, Inc. | Surgical tool systems and methods |
| US10357184B2 (en) | 2012-06-21 | 2019-07-23 | Globus Medical, Inc. | Surgical tool systems and method |
| US10893912B2 (en) | 2006-02-16 | 2021-01-19 | Globus Medical Inc. | Surgical tool systems and methods |
| US9254123B2 (en) | 2009-04-29 | 2016-02-09 | Hansen Medical, Inc. | Flexible and steerable elongate instruments with shape control and support elements |
| US8672837B2 (en) | 2010-06-24 | 2014-03-18 | Hansen Medical, Inc. | Methods and devices for controlling a shapeable medical device |
| US20120071894A1 (en) | 2010-09-17 | 2012-03-22 | Tanner Neal A | Robotic medical systems and methods |
| US9308050B2 (en) | 2011-04-01 | 2016-04-12 | Ecole Polytechnique Federale De Lausanne (Epfl) | Robotic system and method for spinal and other surgeries |
| US20130030363A1 (en) | 2011-07-29 | 2013-01-31 | Hansen Medical, Inc. | Systems and methods utilizing shape sensing fibers |
| CN102689301B (zh) * | 2012-05-25 | 2015-02-11 | 北京卫星制造厂 | 一种导轨摆臂式位置机构 |
| US20130317519A1 (en) | 2012-05-25 | 2013-11-28 | Hansen Medical, Inc. | Low friction instrument driver interface for robotic systems |
| US10758315B2 (en) | 2012-06-21 | 2020-09-01 | Globus Medical Inc. | Method and system for improving 2D-3D registration convergence |
| US10624710B2 (en) | 2012-06-21 | 2020-04-21 | Globus Medical, Inc. | System and method for measuring depth of instrumentation |
| US11607149B2 (en) | 2012-06-21 | 2023-03-21 | Globus Medical Inc. | Surgical tool systems and method |
| US11864839B2 (en) | 2012-06-21 | 2024-01-09 | Globus Medical Inc. | Methods of adjusting a virtual implant and related surgical navigation systems |
| US11857149B2 (en) | 2012-06-21 | 2024-01-02 | Globus Medical, Inc. | Surgical robotic systems with target trajectory deviation monitoring and related methods |
| US10136954B2 (en) | 2012-06-21 | 2018-11-27 | Globus Medical, Inc. | Surgical tool systems and method |
| US11045267B2 (en) | 2012-06-21 | 2021-06-29 | Globus Medical, Inc. | Surgical robotic automation with tracking markers |
| US11399900B2 (en) | 2012-06-21 | 2022-08-02 | Globus Medical, Inc. | Robotic systems providing co-registration using natural fiducials and related methods |
| US11253327B2 (en) | 2012-06-21 | 2022-02-22 | Globus Medical, Inc. | Systems and methods for automatically changing an end-effector on a surgical robot |
| US10350013B2 (en) | 2012-06-21 | 2019-07-16 | Globus Medical, Inc. | Surgical tool systems and methods |
| WO2013192598A1 (en) | 2012-06-21 | 2013-12-27 | Excelsius Surgical, L.L.C. | Surgical robot platform |
| US11395706B2 (en) | 2012-06-21 | 2022-07-26 | Globus Medical Inc. | Surgical robot platform |
| US11298196B2 (en) | 2012-06-21 | 2022-04-12 | Globus Medical Inc. | Surgical robotic automation with tracking markers and controlled tool advancement |
| US11317971B2 (en) | 2012-06-21 | 2022-05-03 | Globus Medical, Inc. | Systems and methods related to robotic guidance in surgery |
| US10231791B2 (en) | 2012-06-21 | 2019-03-19 | Globus Medical, Inc. | Infrared signal based position recognition system for use with a robot-assisted surgery |
| US11116576B2 (en) | 2012-06-21 | 2021-09-14 | Globus Medical Inc. | Dynamic reference arrays and methods of use |
| US11864745B2 (en) | 2012-06-21 | 2024-01-09 | Globus Medical, Inc. | Surgical robotic system with retractor |
| US11857266B2 (en) | 2012-06-21 | 2024-01-02 | Globus Medical, Inc. | System for a surveillance marker in robotic-assisted surgery |
| US11974822B2 (en) | 2012-06-21 | 2024-05-07 | Globus Medical Inc. | Method for a surveillance marker in robotic-assisted surgery |
| US11793570B2 (en) | 2012-06-21 | 2023-10-24 | Globus Medical Inc. | Surgical robotic automation with tracking markers |
| EP2885114B1 (en) | 2012-08-15 | 2021-06-30 | Intuitive Surgical Operations, Inc. | Phantom degrees of freedom for manipulating the movement of mechanical bodies |
| JP6255403B2 (ja) | 2012-08-15 | 2017-12-27 | インテュイティブ サージカル オペレーションズ, インコーポレイテッド | 関節推定及び制御におけるファントム自由度 |
| KR102186365B1 (ko) | 2012-08-15 | 2020-12-03 | 인튜어티브 서지컬 오퍼레이션즈 인코포레이티드 | 수술 시스템의 운동을 조종하기 위한 가상 자유도 |
| US10492876B2 (en) | 2012-09-17 | 2019-12-03 | Omniguide, Inc. | Devices and methods for laser surgery |
| US10149720B2 (en) | 2013-03-08 | 2018-12-11 | Auris Health, Inc. | Method, apparatus, and a system for facilitating bending of an instrument in a surgical or medical robotic environment |
| US9057600B2 (en) | 2013-03-13 | 2015-06-16 | Hansen Medical, Inc. | Reducing incremental measurement sensor error |
| US9173713B2 (en) | 2013-03-14 | 2015-11-03 | Hansen Medical, Inc. | Torque-based catheter articulation |
| US20140277334A1 (en) | 2013-03-14 | 2014-09-18 | Hansen Medical, Inc. | Active drives for robotic catheter manipulators |
| US11213363B2 (en) | 2013-03-14 | 2022-01-04 | Auris Health, Inc. | Catheter tension sensing |
| US9326822B2 (en) | 2013-03-14 | 2016-05-03 | Hansen Medical, Inc. | Active drives for robotic catheter manipulators |
| US9408669B2 (en) | 2013-03-15 | 2016-08-09 | Hansen Medical, Inc. | Active drive mechanism with finite range of motion |
| US20140276647A1 (en) | 2013-03-15 | 2014-09-18 | Hansen Medical, Inc. | Vascular remote catheter manipulator |
| US20140276936A1 (en) | 2013-03-15 | 2014-09-18 | Hansen Medical, Inc. | Active drive mechanism for simultaneous rotation and translation |
| US10376672B2 (en) | 2013-03-15 | 2019-08-13 | Auris Health, Inc. | Catheter insertion system and method of fabrication |
| US9271663B2 (en) | 2013-03-15 | 2016-03-01 | Hansen Medical, Inc. | Flexible instrument localization from both remote and elongation sensors |
| US9629595B2 (en) | 2013-03-15 | 2017-04-25 | Hansen Medical, Inc. | Systems and methods for localizing, tracking and/or controlling medical instruments |
| US9014851B2 (en) | 2013-03-15 | 2015-04-21 | Hansen Medical, Inc. | Systems and methods for tracking robotically controlled medical instruments |
| US11020016B2 (en) | 2013-05-30 | 2021-06-01 | Auris Health, Inc. | System and method for displaying anatomy and devices on a movable display |
| CN103286787B (zh) * | 2013-06-28 | 2016-06-01 | 招商局重庆交通科研设计院有限公司 | 全自动公路及隧道灯具清洁装置 |
| US9283048B2 (en) | 2013-10-04 | 2016-03-15 | KB Medical SA | Apparatus and systems for precise guidance of surgical tools |
| EP3094272B1 (en) | 2014-01-15 | 2021-04-21 | KB Medical SA | Notched apparatus for guidance of an insertable instrument along an axis during spinal surgery |
| WO2015121311A1 (en) | 2014-02-11 | 2015-08-20 | KB Medical SA | Sterile handle for controlling a robotic surgical system from a sterile field |
| GB2523224C2 (en) * | 2014-03-07 | 2021-06-02 | Cambridge Medical Robotics Ltd | Surgical arm |
| EP2923669B1 (en) | 2014-03-24 | 2017-06-28 | Hansen Medical, Inc. | Systems and devices for catheter driving instinctiveness |
| US10046140B2 (en) | 2014-04-21 | 2018-08-14 | Hansen Medical, Inc. | Devices, systems, and methods for controlling active drive systems |
| EP3134022B1 (en) | 2014-04-24 | 2018-01-10 | KB Medical SA | Surgical instrument holder for use with a robotic surgical system |
| US10569052B2 (en) | 2014-05-15 | 2020-02-25 | Auris Health, Inc. | Anti-buckling mechanisms for catheters |
| US9561083B2 (en) | 2014-07-01 | 2017-02-07 | Auris Surgical Robotics, Inc. | Articulating flexible endoscopic tool with roll capabilities |
| US10792464B2 (en) | 2014-07-01 | 2020-10-06 | Auris Health, Inc. | Tool and method for using surgical endoscope with spiral lumens |
| US9744335B2 (en) | 2014-07-01 | 2017-08-29 | Auris Surgical Robotics, Inc. | Apparatuses and methods for monitoring tendons of steerable catheters |
| US10357257B2 (en) | 2014-07-14 | 2019-07-23 | KB Medical SA | Anti-skid surgical instrument for use in preparing holes in bone tissue |
| CN104149081B (zh) * | 2014-07-28 | 2017-01-18 | 广东工业大学 | 一种模块化的手持式双操作端主机器人 |
| CN105455899A (zh) * | 2014-08-08 | 2016-04-06 | 深圳市贝斯达医疗股份有限公司 | 一种用于磁共振手术导航系统的无磁机械臂 |
| KR102292155B1 (ko) | 2014-09-30 | 2021-08-25 | 아우리스 헬스, 인크. | 가상 레일 및 가요성 내시경을 구비하는 구성 변경 가능한 로봇 수술 시스템 |
| US10314463B2 (en) | 2014-10-24 | 2019-06-11 | Auris Health, Inc. | Automated endoscope calibration |
| US10013808B2 (en) | 2015-02-03 | 2018-07-03 | Globus Medical, Inc. | Surgeon head-mounted display apparatuses |
| EP3258872B1 (en) | 2015-02-18 | 2023-04-26 | KB Medical SA | Systems for performing minimally invasive spinal surgery with a robotic surgical system using a percutaneous technique |
| US11819636B2 (en) | 2015-03-30 | 2023-11-21 | Auris Health, Inc. | Endoscope pull wire electrical circuit |
| WO2016164824A1 (en) * | 2015-04-09 | 2016-10-13 | Auris Surgical Robotics, Inc. | Surgical system with configurable rail-mounted mechanical arms |
| GB2538497B (en) | 2015-05-14 | 2020-10-28 | Cmr Surgical Ltd | Torque sensing in a surgical robotic wrist |
| WO2016187054A1 (en) * | 2015-05-15 | 2016-11-24 | Auris Surgical Robotics, Inc. | Surgical robotics system |
| CN104983468B (zh) * | 2015-07-24 | 2017-11-14 | 绵阳美科电子设备有限责任公司 | 一种腔镜操作手机器手手臂及其操作方法 |
| US10058394B2 (en) | 2015-07-31 | 2018-08-28 | Globus Medical, Inc. | Robot arm and methods of use |
| US10646298B2 (en) | 2015-07-31 | 2020-05-12 | Globus Medical, Inc. | Robot arm and methods of use |
| US10080615B2 (en) | 2015-08-12 | 2018-09-25 | Globus Medical, Inc. | Devices and methods for temporary mounting of parts to bone |
| EP3344179B1 (en) | 2015-08-31 | 2021-06-30 | KB Medical SA | Robotic surgical systems |
| CN113229942A (zh) | 2015-09-09 | 2021-08-10 | 奥瑞斯健康公司 | 手术器械装置操纵器 |
| US10034716B2 (en) | 2015-09-14 | 2018-07-31 | Globus Medical, Inc. | Surgical robotic systems and methods thereof |
| EP4070723A1 (en) | 2015-09-18 | 2022-10-12 | Auris Health, Inc. | Navigation of tubular networks |
| US9771092B2 (en) | 2015-10-13 | 2017-09-26 | Globus Medical, Inc. | Stabilizer wheel assembly and methods of use |
| US10639108B2 (en) | 2015-10-30 | 2020-05-05 | Auris Health, Inc. | Process for percutaneous operations |
| US9955986B2 (en) | 2015-10-30 | 2018-05-01 | Auris Surgical Robotics, Inc. | Basket apparatus |
| US9949749B2 (en) | 2015-10-30 | 2018-04-24 | Auris Surgical Robotics, Inc. | Object capture with a basket |
| US10143526B2 (en) | 2015-11-30 | 2018-12-04 | Auris Health, Inc. | Robot-assisted driving systems and methods |
| US10117632B2 (en) | 2016-02-03 | 2018-11-06 | Globus Medical, Inc. | Portable medical imaging system with beam scanning collimator |
| US11058378B2 (en) | 2016-02-03 | 2021-07-13 | Globus Medical, Inc. | Portable medical imaging system |
| US10842453B2 (en) | 2016-02-03 | 2020-11-24 | Globus Medical, Inc. | Portable medical imaging system |
| US11883217B2 (en) | 2016-02-03 | 2024-01-30 | Globus Medical, Inc. | Portable medical imaging system and method |
| US10448910B2 (en) | 2016-02-03 | 2019-10-22 | Globus Medical, Inc. | Portable medical imaging system |
| US10866119B2 (en) | 2016-03-14 | 2020-12-15 | Globus Medical, Inc. | Metal detector for detecting insertion of a surgical device into a hollow tube |
| EP3241518A3 (en) | 2016-04-11 | 2018-01-24 | Globus Medical, Inc | Surgical tool systems and methods |
| US10454347B2 (en) | 2016-04-29 | 2019-10-22 | Auris Health, Inc. | Compact height torque sensing articulation axis assembly |
| US10463439B2 (en) | 2016-08-26 | 2019-11-05 | Auris Health, Inc. | Steerable catheter with shaft load distributions |
| US11241559B2 (en) | 2016-08-29 | 2022-02-08 | Auris Health, Inc. | Active drive for guidewire manipulation |
| CN109069138B (zh) | 2016-08-31 | 2021-07-20 | 奥瑞斯健康公司 | 长度守恒的手术器械 |
| US11389360B2 (en) * | 2016-09-16 | 2022-07-19 | Verb Surgical Inc. | Linkage mechanisms for mounting robotic arms to a surgical table |
| EP3512449A4 (en) | 2016-09-16 | 2020-05-20 | Verb Surgical Inc. | TABLE ADAPTERS FOR MOUNTING ROBOTIC ARMS ON A SURGICAL TABLE |
| CN109310473B (zh) * | 2016-09-19 | 2023-02-17 | 直观外科手术操作公司 | 用于可控臂的基部定位系统以及相关方法 |
| WO2018059838A1 (en) * | 2016-09-27 | 2018-04-05 | Brainlab Ag | Efficient positioning of a mechatronic arm |
| CN106236276B (zh) * | 2016-09-28 | 2019-09-17 | 微创(上海)医疗机器人有限公司 | 手术机器人系统 |
| US9931025B1 (en) | 2016-09-30 | 2018-04-03 | Auris Surgical Robotics, Inc. | Automated calibration of endoscopes with pull wires |
| US10244926B2 (en) | 2016-12-28 | 2019-04-02 | Auris Health, Inc. | Detecting endolumenal buckling of flexible instruments |
| JP7233841B2 (ja) | 2017-01-18 | 2023-03-07 | ケービー メディカル エスアー | ロボット外科手術システムのロボットナビゲーション |
| IT201700025766A1 (it) * | 2017-03-08 | 2018-09-08 | Epistolio S R L | Robot di verniciatura |
| US11071594B2 (en) | 2017-03-16 | 2021-07-27 | KB Medical SA | Robotic navigation of robotic surgical systems |
| AU2018243364B2 (en) | 2017-03-31 | 2023-10-05 | Auris Health, Inc. | Robotic systems for navigation of luminal networks that compensate for physiological noise |
| CN110831498B (zh) | 2017-05-12 | 2022-08-12 | 奥瑞斯健康公司 | 活检装置和系统 |
| AU2018270785B2 (en) | 2017-05-17 | 2023-11-23 | Auris Health, Inc. | Exchangeable working channel |
| US10022192B1 (en) | 2017-06-23 | 2018-07-17 | Auris Health, Inc. | Automatically-initialized robotic systems for navigation of luminal networks |
| US11026758B2 (en) | 2017-06-28 | 2021-06-08 | Auris Health, Inc. | Medical robotics systems implementing axis constraints during actuation of one or more motorized joints |
| KR102341451B1 (ko) | 2017-06-28 | 2021-12-23 | 아우리스 헬스, 인코포레이티드 | 기기의 삽입 보상을 위한 로봇 시스템, 방법 및 비일시적 컴퓨터 가독 저장 매체 |
| US10426559B2 (en) | 2017-06-30 | 2019-10-01 | Auris Health, Inc. | Systems and methods for medical instrument compression compensation |
| US10675094B2 (en) | 2017-07-21 | 2020-06-09 | Globus Medical Inc. | Robot surgical platform |
| US10145747B1 (en) | 2017-10-10 | 2018-12-04 | Auris Health, Inc. | Detection of undesirable forces on a surgical robotic arm |
| US10555778B2 (en) | 2017-10-13 | 2020-02-11 | Auris Health, Inc. | Image-based branch detection and mapping for navigation |
| US11058493B2 (en) | 2017-10-13 | 2021-07-13 | Auris Health, Inc. | Robotic system configured for navigation path tracing |
| US11357548B2 (en) | 2017-11-09 | 2022-06-14 | Globus Medical, Inc. | Robotic rod benders and related mechanical and motor housings |
| US10898252B2 (en) | 2017-11-09 | 2021-01-26 | Globus Medical, Inc. | Surgical robotic systems for bending surgical rods, and related methods and devices |
| US11794338B2 (en) | 2017-11-09 | 2023-10-24 | Globus Medical Inc. | Robotic rod benders and related mechanical and motor housings |
| US11134862B2 (en) | 2017-11-10 | 2021-10-05 | Globus Medical, Inc. | Methods of selecting surgical implants and related devices |
| CN110831536B (zh) | 2017-12-06 | 2021-09-07 | 奥瑞斯健康公司 | 用于针对非命令器械滚转进行校正的系统和方法 |
| WO2019118368A1 (en) | 2017-12-11 | 2019-06-20 | Auris Health, Inc. | Systems and methods for instrument based insertion architectures |
| CN110869173B (zh) | 2017-12-14 | 2023-11-17 | 奥瑞斯健康公司 | 用于估计器械定位的系统与方法 |
| KR20200101334A (ko) | 2017-12-18 | 2020-08-27 | 아우리스 헬스, 인코포레이티드 | 관강내 조직망 내 기구 추적 및 항행을 위한 방법 및 시스템 |
| CN108056823B (zh) * | 2017-12-27 | 2020-09-22 | 微创(上海)医疗机器人有限公司 | 手术机器人终端 |
| CN108245253A (zh) * | 2018-01-09 | 2018-07-06 | 河南工程学院 | 一种医疗机器人专用机械臂 |
| CN111885980B (zh) | 2018-01-17 | 2023-03-28 | 奥瑞斯健康公司 | 具有可调式臂支撑件的外科平台 |
| KR20200118439A (ko) | 2018-01-17 | 2020-10-15 | 아우리스 헬스, 인코포레이티드 | 개선된 로봇 아암을 갖는 수술 로봇 시스템 |
| US20190254753A1 (en) | 2018-02-19 | 2019-08-22 | Globus Medical, Inc. | Augmented reality navigation systems for use with robotic surgical systems and methods of their use |
| US11109920B2 (en) | 2018-03-28 | 2021-09-07 | Auris Health, Inc. | Medical instruments with variable bending stiffness profiles |
| JP7214747B2 (ja) | 2018-03-28 | 2023-01-30 | オーリス ヘルス インコーポレイテッド | 位置センサの位置合わせのためのシステム及び方法 |
| US10827913B2 (en) | 2018-03-28 | 2020-11-10 | Auris Health, Inc. | Systems and methods for displaying estimated location of instrument |
| US10573023B2 (en) | 2018-04-09 | 2020-02-25 | Globus Medical, Inc. | Predictive visualization of medical imaging scanner component movement |
| WO2019231895A1 (en) | 2018-05-30 | 2019-12-05 | Auris Health, Inc. | Systems and methods for location sensor-based branch prediction |
| CN112236083A (zh) | 2018-05-31 | 2021-01-15 | 奥瑞斯健康公司 | 用于导航检测生理噪声的管腔网络的机器人系统和方法 |
| KR102455671B1 (ko) | 2018-05-31 | 2022-10-20 | 아우리스 헬스, 인코포레이티드 | 이미지-기반 기도 분석 및 매핑 |
| WO2019231891A1 (en) | 2018-05-31 | 2019-12-05 | Auris Health, Inc. | Path-based navigation of tubular networks |
| US10898276B2 (en) | 2018-08-07 | 2021-01-26 | Auris Health, Inc. | Combining strain-based shape sensing with catheter control |
| WO2020068853A2 (en) | 2018-09-26 | 2020-04-02 | Auris Health, Inc. | Articulating medical instruments |
| KR20210073542A (ko) | 2018-09-28 | 2021-06-18 | 아우리스 헬스, 인코포레이티드 | 의료 기구를 도킹시키기 위한 시스템 및 방법 |
| EP3856001A4 (en) | 2018-09-28 | 2022-06-22 | Auris Health, Inc. | DEVICES, SYSTEMS AND METHODS FOR MANUAL AND ROBOTIC DRIVE MEDICAL INSTRUMENTS |
| US11337742B2 (en) | 2018-11-05 | 2022-05-24 | Globus Medical Inc | Compliant orthopedic driver |
| US11278360B2 (en) | 2018-11-16 | 2022-03-22 | Globus Medical, Inc. | End-effectors for surgical robotic systems having sealed optical components |
| US11602402B2 (en) | 2018-12-04 | 2023-03-14 | Globus Medical, Inc. | Drill guide fixtures, cranial insertion fixtures, and related methods and robotic systems |
| US11744655B2 (en) | 2018-12-04 | 2023-09-05 | Globus Medical, Inc. | Drill guide fixtures, cranial insertion fixtures, and related methods and robotic systems |
| CN113286543A (zh) | 2018-12-28 | 2021-08-20 | 奥瑞斯健康公司 | 具有可关节运动区段的医疗器械 |
| US11918313B2 (en) | 2019-03-15 | 2024-03-05 | Globus Medical Inc. | Active end effectors for surgical robots |
| US11571265B2 (en) | 2019-03-22 | 2023-02-07 | Globus Medical Inc. | System for neuronavigation registration and robotic trajectory guidance, robotic surgery, and related methods and devices |
| US11806084B2 (en) | 2019-03-22 | 2023-11-07 | Globus Medical, Inc. | System for neuronavigation registration and robotic trajectory guidance, and related methods and devices |
| EP3908224A4 (en) | 2019-03-22 | 2022-10-19 | Auris Health, Inc. | SYSTEMS AND METHODS FOR INLET ALIGNMENTS ON MEDICAL DEVICES |
| US20200297357A1 (en) | 2019-03-22 | 2020-09-24 | Globus Medical, Inc. | System for neuronavigation registration and robotic trajectory guidance, robotic surgery, and related methods and devices |
| US11419616B2 (en) | 2019-03-22 | 2022-08-23 | Globus Medical, Inc. | System for neuronavigation registration and robotic trajectory guidance, robotic surgery, and related methods and devices |
| US11317978B2 (en) | 2019-03-22 | 2022-05-03 | Globus Medical, Inc. | System for neuronavigation registration and robotic trajectory guidance, robotic surgery, and related methods and devices |
| US11382549B2 (en) | 2019-03-22 | 2022-07-12 | Globus Medical, Inc. | System for neuronavigation registration and robotic trajectory guidance, and related methods and devices |
| CN109998685A (zh) * | 2019-03-28 | 2019-07-12 | 山东大学齐鲁医院 | 一种单、双臂辅助微创外科手术机器人及协作组合机器人系统 |
| US11617627B2 (en) | 2019-03-29 | 2023-04-04 | Auris Health, Inc. | Systems and methods for optical strain sensing in medical instruments |
| US11045179B2 (en) | 2019-05-20 | 2021-06-29 | Global Medical Inc | Robot-mounted retractor system |
| US11628023B2 (en) | 2019-07-10 | 2023-04-18 | Globus Medical, Inc. | Robotic navigational system for interbody implants |
| AU2020315596A1 (en) * | 2019-07-15 | 2022-02-24 | Arthrex, Inc. | Strut assemblies and external fixation systems |
| EP4005519A4 (en) * | 2019-07-26 | 2023-08-23 | Iucf-Hyu (Industry-University Cooperation Foundation Hanyang University) | MAGNETIC DRIVE SYSTEM AND CONTROL METHOD THEREOF |
| US11896330B2 (en) | 2019-08-15 | 2024-02-13 | Auris Health, Inc. | Robotic medical system having multiple medical instruments |
| WO2021028883A1 (en) | 2019-08-15 | 2021-02-18 | Auris Health, Inc. | Medical device having multiple bending sections |
| US11147633B2 (en) | 2019-08-30 | 2021-10-19 | Auris Health, Inc. | Instrument image reliability systems and methods |
| US11207141B2 (en) | 2019-08-30 | 2021-12-28 | Auris Health, Inc. | Systems and methods for weight-based registration of location sensors |
| US11571171B2 (en) | 2019-09-24 | 2023-02-07 | Globus Medical, Inc. | Compound curve cable chain |
| US11890066B2 (en) | 2019-09-30 | 2024-02-06 | Globus Medical, Inc | Surgical robot with passive end effector |
| US11864857B2 (en) | 2019-09-27 | 2024-01-09 | Globus Medical, Inc. | Surgical robot with passive end effector |
| US11426178B2 (en) | 2019-09-27 | 2022-08-30 | Globus Medical Inc. | Systems and methods for navigating a pin guide driver |
| WO2021064536A1 (en) | 2019-09-30 | 2021-04-08 | Auris Health, Inc. | Medical instrument with capstan |
| US11510684B2 (en) | 2019-10-14 | 2022-11-29 | Globus Medical, Inc. | Rotary motion passive end effector for surgical robots in orthopedic surgeries |
| CN114901188A (zh) | 2019-12-31 | 2022-08-12 | 奥瑞斯健康公司 | 动态滑轮系统 |
| JP2023508525A (ja) | 2019-12-31 | 2023-03-02 | オーリス ヘルス インコーポレイテッド | 経皮的アクセスのための位置合わせ技術 |
| WO2021137108A1 (en) | 2019-12-31 | 2021-07-08 | Auris Health, Inc. | Alignment interfaces for percutaneous access |
| US11439419B2 (en) | 2019-12-31 | 2022-09-13 | Auris Health, Inc. | Advanced basket drive mode |
| KR20220123273A (ko) | 2019-12-31 | 2022-09-06 | 아우리스 헬스, 인코포레이티드 | 해부학적 특징부 식별 및 표적설정 |
| US11382699B2 (en) | 2020-02-10 | 2022-07-12 | Globus Medical Inc. | Extended reality visualization of optical tool tracking volume for computer assisted navigation in surgery |
| US11207150B2 (en) | 2020-02-19 | 2021-12-28 | Globus Medical, Inc. | Displaying a virtual model of a planned instrument attachment to ensure correct selection of physical instrument attachment |
| US11253216B2 (en) | 2020-04-28 | 2022-02-22 | Globus Medical Inc. | Fixtures for fluoroscopic imaging systems and related navigation systems and methods |
| US11382700B2 (en) | 2020-05-08 | 2022-07-12 | Globus Medical Inc. | Extended reality headset tool tracking and control |
| US11510750B2 (en) | 2020-05-08 | 2022-11-29 | Globus Medical, Inc. | Leveraging two-dimensional digital imaging and communication in medicine imagery in three-dimensional extended reality applications |
| US11153555B1 (en) | 2020-05-08 | 2021-10-19 | Globus Medical Inc. | Extended reality headset camera system for computer assisted navigation in surgery |
| US11317973B2 (en) | 2020-06-09 | 2022-05-03 | Globus Medical, Inc. | Camera tracking bar for computer assisted navigation during surgery |
| US11382713B2 (en) | 2020-06-16 | 2022-07-12 | Globus Medical, Inc. | Navigated surgical system with eye to XR headset display calibration |
| WO2022001224A1 (zh) * | 2020-06-30 | 2022-01-06 | 北京术锐技术有限公司 | 手术机器人系统 |
| US11877807B2 (en) | 2020-07-10 | 2024-01-23 | Globus Medical, Inc | Instruments for navigated orthopedic surgeries |
| US11793588B2 (en) | 2020-07-23 | 2023-10-24 | Globus Medical, Inc. | Sterile draping of robotic arms |
| US20230285044A1 (en) * | 2020-08-07 | 2023-09-14 | Alma Mater Studiorum - Universita 'di Bologna | Laparoscopic surgical instrument |
| US11737831B2 (en) | 2020-09-02 | 2023-08-29 | Globus Medical Inc. | Surgical object tracking template generation for computer assisted navigation during surgical procedure |
| US11523785B2 (en) | 2020-09-24 | 2022-12-13 | Globus Medical, Inc. | Increased cone beam computed tomography volume length without requiring stitching or longitudinal C-arm movement |
| US11911112B2 (en) | 2020-10-27 | 2024-02-27 | Globus Medical, Inc. | Robotic navigational system |
| US11941814B2 (en) | 2020-11-04 | 2024-03-26 | Globus Medical Inc. | Auto segmentation using 2-D images taken during 3-D imaging spin |
| CN112388668B (zh) * | 2020-11-06 | 2021-11-23 | 皖南医学院 | 一种仿真机械臂及其控制系统 |
| US11717350B2 (en) | 2020-11-24 | 2023-08-08 | Globus Medical Inc. | Methods for robotic assistance and navigation in spinal surgery and related systems |
| US11857273B2 (en) | 2021-07-06 | 2024-01-02 | Globus Medical, Inc. | Ultrasonic robotic surgical navigation |
| US11439444B1 (en) | 2021-07-22 | 2022-09-13 | Globus Medical, Inc. | Screw tower and rod reduction tool |
| US11911115B2 (en) | 2021-12-20 | 2024-02-27 | Globus Medical Inc. | Flat panel registration fixture and method of using same |
| WO2023211894A1 (en) * | 2022-04-25 | 2023-11-02 | University Of Cincinnati | Bed-mounted surgical tool organization system |
| CN115431251B (zh) * | 2022-09-16 | 2023-03-21 | 哈尔滨工业大学 | 一种仿人机器人上肢 |
Family Cites Families (31)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4068156A (en) | 1977-03-01 | 1978-01-10 | Martin Marietta Corporation | Rate control system for manipulator arms |
| JPH0710510B2 (ja) | 1986-06-03 | 1995-02-08 | フアナツク株式会社 | 工業用ロボツトの腕構造 |
| US4921393A (en) | 1988-03-09 | 1990-05-01 | Sri International | Articulatable structure with adjustable end-point compliance |
| JPH0825151B2 (ja) * | 1988-09-16 | 1996-03-13 | 東京応化工業株式会社 | ハンドリングユニット |
| CA2078295C (en) * | 1991-08-05 | 1995-11-21 | John Michael Putman | Endoscope stabilizer |
| JPH05109866A (ja) * | 1991-10-16 | 1993-04-30 | Nec Corp | ウエハ移載ロボツト |
| US5762458A (en) | 1996-02-20 | 1998-06-09 | Computer Motion, Inc. | Method and apparatus for performing minimally invasive cardiac procedures |
| JP3476878B2 (ja) * | 1993-11-15 | 2003-12-10 | オリンパス株式会社 | 手術用マニピュレータ |
| US6120433A (en) * | 1994-09-01 | 2000-09-19 | Olympus Optical Co., Ltd. | Surgical manipulator system |
| US5855583A (en) * | 1996-02-20 | 1999-01-05 | Computer Motion, Inc. | Method and apparatus for performing minimally invasive cardiac procedures |
| US6436107B1 (en) * | 1996-02-20 | 2002-08-20 | Computer Motion, Inc. | Method and apparatus for performing minimally invasive surgical procedures |
| US5811951A (en) | 1996-10-14 | 1998-09-22 | Regents Of The University Of California | High precision redundant robotic manipulator |
| EP1109497B1 (en) * | 1998-08-04 | 2009-05-06 | Intuitive Surgical, Inc. | Manipulator positioning linkage for robotic surgery |
| WO2000030557A1 (en) * | 1998-11-23 | 2000-06-02 | Microdexterity Systems, Inc. | Surgical manipulator |
| US6485250B2 (en) * | 1998-12-30 | 2002-11-26 | Brooks Automation Inc. | Substrate transport apparatus with multiple arms on a common axis of rotation |
| US6424885B1 (en) * | 1999-04-07 | 2002-07-23 | Intuitive Surgical, Inc. | Camera referenced control in a minimally invasive surgical apparatus |
| US6969385B2 (en) | 2002-05-01 | 2005-11-29 | Manuel Ricardo Moreyra | Wrist with decoupled motion transmission |
| CA2633137C (en) * | 2002-08-13 | 2012-10-23 | The Governors Of The University Of Calgary | Microsurgical robot system |
| JP2004288719A (ja) * | 2003-03-19 | 2004-10-14 | Tokyo Electron Ltd | 基板搬送装置及び基板処理装置 |
| KR200319262Y1 (ko) * | 2003-02-08 | 2003-07-07 | 구영만 | 조명장치를 갖는 화장품 |
| DE10324844A1 (de) | 2003-04-01 | 2004-12-23 | Tuebingen Scientific Surgical Products Gmbh | Chirurgisches Instrument mit Instrumentengriff und Nullpunkteinstellung |
| CN100336640C (zh) * | 2005-02-01 | 2007-09-12 | 天津大学 | 外科手术机器人从操作手 |
| CA2598627C (en) * | 2005-02-22 | 2013-11-26 | Mako Surgical Corp. | Haptic guidance system and method |
| EP1815949A1 (en) * | 2006-02-03 | 2007-08-08 | The European Atomic Energy Community (EURATOM), represented by the European Commission | Medical robotic system with manipulator arm of the cylindrical coordinate type |
| CN100463661C (zh) | 2006-12-04 | 2009-02-25 | 天津大学 | 具有重力补偿功能的被动式手动锁紧支架 |
| WO2009004616A2 (en) * | 2007-07-02 | 2009-01-08 | M.S.T. Medical Surgery Technologies Ltd | System for positioning endoscope and surgical instruments |
| CN100581495C (zh) * | 2008-10-31 | 2010-01-20 | 天津大学 | 一种用于辅助微创外科手术的持镜机器人系统 |
| KR101075363B1 (ko) * | 2008-10-31 | 2011-10-19 | 정창욱 | 최소 침습 수술 도구를 포함하는 수술용 로봇 시스템 |
| CN101411631B (zh) * | 2008-11-21 | 2011-05-11 | 南开大学 | 五自由度脊柱微创机器人操作机构 |
| JP2011238748A (ja) * | 2010-05-10 | 2011-11-24 | Creative Sensor Inc | 紫外光発光ダイオード固化装置 |
| KR101103327B1 (ko) * | 2011-09-29 | 2012-01-11 | 주식회사 쥬디산업 | 휴대용 손톱 경화기 |
-
2009
- 2009-05-22 ES ES200901313A patent/ES2388029B1/es active Active
-
2010
- 2010-05-20 WO PCT/ES2010/000224 patent/WO2010133733A1/es active Application Filing
- 2010-05-20 CN CN201080027584.1A patent/CN102458295B/zh active Active
- 2010-05-20 JP JP2012511310A patent/JP5785538B2/ja active Active
- 2010-05-20 RU RU2011152395/14A patent/RU2531469C2/ru active
- 2010-05-20 ES ES10777402.8T patent/ES2655029T3/es active Active
- 2010-05-20 US US13/321,802 patent/US9119653B2/en active Active
- 2010-05-20 KR KR1020117030571A patent/KR101665744B1/ko active IP Right Grant
- 2010-05-20 BR BRPI1011053A patent/BRPI1011053B8/pt active IP Right Grant
- 2010-05-20 EP EP10777402.8A patent/EP2433585B1/en active Active
- 2010-05-20 CA CA2762780A patent/CA2762780C/en active Active
- 2010-05-20 MX MX2011012295A patent/MX336487B/es unknown
- 2010-05-20 PL PL10777402T patent/PL2433585T3/pl unknown
- 2010-05-20 SG SG2011085768A patent/SG176183A1/en unknown
- 2010-05-20 AU AU2010251107A patent/AU2010251107B2/en active Active
-
2011
- 2011-11-20 IL IL216470A patent/IL216470A0/en active IP Right Grant
- 2011-12-21 ZA ZA2011/09443A patent/ZA201109443B/en unknown
Also Published As
| Publication number | Publication date |
|---|---|
| EP2433585A4 (en) | 2015-11-04 |
| CA2762780A1 (en) | 2010-11-25 |
| JP2012527276A (ja) | 2012-11-08 |
| KR101665744B1 (ko) | 2016-10-12 |
| ZA201109443B (en) | 2013-02-27 |
| WO2010133733A1 (es) | 2010-11-25 |
| IL216470A0 (en) | 2012-01-31 |
| PL2433585T3 (pl) | 2018-02-28 |
| EP2433585B1 (en) | 2017-09-13 |
| BRPI1011053B1 (pt) | 2020-09-29 |
| US9119653B2 (en) | 2015-09-01 |
| RU2011152395A (ru) | 2013-06-27 |
| US20120136372A1 (en) | 2012-05-31 |
| ES2388029B1 (es) | 2013-08-13 |
| AU2010251107B2 (en) | 2015-06-25 |
| CN102458295A (zh) | 2012-05-16 |
| CN102458295B (zh) | 2014-06-25 |
| SG176183A1 (en) | 2011-12-29 |
| KR20120068768A (ko) | 2012-06-27 |
| BRPI1011053A2 (pt) | 2016-03-15 |
| RU2531469C2 (ru) | 2014-10-20 |
| ES2655029T3 (es) | 2018-02-16 |
| BRPI1011053B8 (pt) | 2021-06-22 |
| AU2010251107A1 (en) | 2012-01-19 |
| MX2011012295A (es) | 2011-12-16 |
| ES2388029A1 (es) | 2012-10-05 |
| CA2762780C (en) | 2017-09-26 |
| EP2433585A1 (en) | 2012-03-28 |
| MX336487B (es) | 2016-01-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5785538B2 (ja) | 腹腔鏡手術用のロボットシステム | |
| JP7434246B2 (ja) | ゼロ空間運動と同時にゼロ直交空間内でのクラッチングによりマニピュレータアームを位置決めするためのシステム及び方法 | |
| JP6640947B2 (ja) | 手術器具マニピュレータの態様 | |
| US10219871B2 (en) | Robotic system for tele-surgery | |
| KR102530353B1 (ko) | 하드웨어 제한형 원격 중심 로봇 매니퓰레이터용 여유 축 및 자유도 | |
| EP3620128B1 (en) | Multi-port surgical robotic system architecture | |
| CN109788994B (zh) | 计算机辅助的远程操作手术系统和方法 | |
| US11844584B2 (en) | Robotic system for tele-surgery | |
| US20230147674A1 (en) | Robotic system for tele-surgery |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130430 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20130430 |
|
| A977 | Report on retrieval |
Free format text: JAPANESE INTERMEDIATE CODE: A971007 Effective date: 20140120 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20140128 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20140424 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20141007 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20150106 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20150630 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20150724 |
|
| R150 | Certificate of patent or registration of utility model |
Ref document number: 5785538 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R150 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |