JP5265141B2 - Portable electronic device, program and information storage medium - Google Patents
Portable electronic device, program and information storage medium Download PDFInfo
- Publication number
- JP5265141B2 JP5265141B2 JP2007159317A JP2007159317A JP5265141B2 JP 5265141 B2 JP5265141 B2 JP 5265141B2 JP 2007159317 A JP2007159317 A JP 2007159317A JP 2007159317 A JP2007159317 A JP 2007159317A JP 5265141 B2 JP5265141 B2 JP 5265141B2
- Authority
- JP
- Japan
- Prior art keywords
- user
- sensor
- history information
- information
- control target
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images




















Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04M—TELEPHONIC COMMUNICATION
- H04M1/00—Substation equipment, e.g. for use by subscribers
- H04M1/72—Mobile telephones; Cordless telephones, i.e. devices for establishing wireless links to base stations without route selection
- H04M1/724—User interfaces specially adapted for cordless or mobile telephones
- H04M1/72403—User interfaces specially adapted for cordless or mobile telephones with means for local support of applications that increase the functionality
- H04M1/72409—User interfaces specially adapted for cordless or mobile telephones with means for local support of applications that increase the functionality by interfacing with external accessories
- H04M1/72412—User interfaces specially adapted for cordless or mobile telephones with means for local support of applications that increase the functionality by interfacing with external accessories using two-way short-range wireless interfaces
Abstract
Description
本発明は、携帯型電子機器、プログラム及び情報記憶媒体に関係する。 The present invention relates to a portable electronic device, a program, and an information storage medium.
従来の情報提供システムとして、地点、施設等の情報だけではなく、ユーザが案内してほしい場所に至るまでの経路や途中地点を柔軟に案内することができるシステムが、例えば特許文献1に開示されている。
As a conventional information providing system, for example,
しかしながら、この特許文献1のシステムには、ユーザが必要とする情報をユーザが意図的な取得行為を行わなくても提供するという、いわゆるプッシュ情報としての情報提供を実現できないという課題がある。
However, the system disclosed in
このような課題を解決するものとして、特許文献2に開示される情報提供システムが知られている。このシステムでは、ウェアラブルセンサによりユーザの活動状態を同定し、活動状態に応じた情報表示を行うことで、プッシュ情報としての情報提供を可能にしている。
As a solution to such a problem, an information providing system disclosed in
しかしながら、この特許文献2には、モバイル環境において効果的な情報提供システムについては開示されているものの、複数のサブシステムの統合システムに好適な携帯型電子機器については開示されていない。
本発明は、以上のような課題に鑑みてなされたものであり、その目的とするところは、複数のサブシステムの統合システムに好適な携帯型電子機器、プログラム及び情報記憶媒体を提供することにある。 The present invention has been made in view of the above problems, and an object of the present invention is to provide a portable electronic device, a program, and an information storage medium suitable for an integrated system of a plurality of subsystems. is there.
本発明は、複数のサブシステムの統合システムに用いられ、ユーザにより所持される携帯型電子機器であって、前記複数のサブシステムの複数のセンサのうち、ユーザの行動を計測する行動センサ、ユーザの状態を計測する状態センサ及びユーザの環境を計測する環境センサの少なくとも1つのセンサからのセンサ情報を取得する情報取得手段と、ユーザの行動、状態及び環境の少なくとも1つについての履歴情報であって取得されたセンサ情報に基づき更新されるユーザ履歴情報を、記憶する履歴情報記憶手段と、ユーザ履歴情報を用いた制御が行われる制御対象機器を、前記複数のサブシステムの複数の制御対象機器の中から選択する制御対象機器選択手段とを含む携帯型電子機器に関係する。また本発明は、上記各手段としてコンピュータを機能させるプログラム、又は該プログラムを記憶したコンピュータ読み取り可能な情報記憶媒体に関係する。 The present invention is a portable electronic device used in an integrated system of a plurality of subsystems and possessed by a user, and a behavior sensor for measuring a user's behavior among a plurality of sensors of the plurality of subsystems, a user Information acquisition means for acquiring sensor information from at least one of a state sensor for measuring the state of the user and an environment sensor for measuring the user's environment, and history information on at least one of the user's behavior, state and environment. A history information storage means for storing user history information updated based on the sensor information acquired in this manner, and a control target device to be controlled using the user history information, a plurality of control target devices of the plurality of subsystems It is related with the portable electronic device containing the control object apparatus selection means to select from among. The present invention also relates to a program that causes a computer to function as each of the above-described means, or a computer-readable information storage medium that stores the program.
本発明によれば、複数のサブシステムの複数のセンサのうち、行動センサ、状態センサ、環境センサの少なくとも1つのセンサからのセンサ情報が取得される。そして取得されたセンサ情報に基づき更新されるユーザ履歴情報が、履歴情報記憶手段に記憶される。そしてユーザ履歴情報を用いた制御が行われる制御対象機器が、複数のサブシステムの複数の制御対象機器の中から選択されて、その制御が行われるようになる。このようにすれば、例えば第1のサブシステムにおいて更新されたユーザ履歴情報に基づいて、第2のサブシステムの制御対象機器を制御することなどが可能になり、複数のサブシステムの統合システムに好適な携帯型電子機器を提供できる。 According to the present invention, sensor information is acquired from at least one of a behavior sensor, a state sensor, and an environment sensor among a plurality of sensors of a plurality of subsystems. Then, the user history information updated based on the acquired sensor information is stored in the history information storage means. Then, a control target device to be controlled using the user history information is selected from a plurality of control target devices of a plurality of subsystems, and the control is performed. In this way, for example, it becomes possible to control devices to be controlled in the second subsystem based on the user history information updated in the first subsystem, so that an integrated system of a plurality of subsystems can be realized. A suitable portable electronic device can be provided.
また本発明では、前記複数のサブシステムの複数のセンサの中から、ユーザが利用中のサブシステムにおいて利用可能なセンサを選択するセンサ選択手段を含み、前記情報取得手段は、前記センサ選択手段により選択されたセンサからのセンサ情報を取得してもよい。このようにすれば、例えば第1のサブシステムのセンサからのセンサ情報に基づき更新されたユーザ履歴情報を、第2のサブシステムのセンサからのセンサ情報に基づきシームレスに更新できるようになる。 Further, the present invention includes a sensor selection unit that selects a sensor that can be used in a subsystem being used by a user from a plurality of sensors of the plurality of subsystems, and the information acquisition unit includes the sensor selection unit. Sensor information from the selected sensor may be acquired. In this way, for example, the user history information updated based on the sensor information from the sensor of the first subsystem can be seamlessly updated based on the sensor information from the sensor of the second subsystem.
また本発明では、前記センサ選択手段は、時間情報、ユーザの場所情報及びユーザの状況情報の少なくとも1つであるTPO情報に基づいて、前記複数のサブシステムの複数のセンサの中から、ユーザが利用中のサブシステムにおいて利用可能なセンサを選択してもよい。このようにすれば、場所、時間又は状況に応じて異なったセンサを選択して、センサ情報の取得できるようになる。 Further, in the present invention, the sensor selection means is configured so that the user can select from a plurality of sensors of the plurality of subsystems based on TPO information that is at least one of time information, user location information, and user status information. Sensors that can be used in the sub-system being used may be selected. In this way, sensor information can be acquired by selecting different sensors according to the location, time or situation.
また本発明では、前記制御対象機器選択手段は、時間情報、ユーザの場所情報及びユーザの状況情報の少なくとも1つであるTPO情報に基づいて、前記複数のサブシステムの複数の制御対象機器の中から、ユーザが利用中のサブシステムにおいて利用可能な制御対象機器を選択してもよい。このようにすれば、場所、時間又は状況に応じて異なった制御対象機器を選択して、制御できるようになる。 According to the present invention, the control target device selection means includes a plurality of control target devices of the plurality of subsystems based on TPO information that is at least one of time information, user location information, and user status information. Therefore, a control target device that can be used in the subsystem being used by the user may be selected. In this way, it becomes possible to select and control different devices to be controlled depending on the place, time or situation.
また本発明では、取得されたセンサ情報に基づいてユーザ履歴情報を更新する履歴情報更新手段を含んでもよい。 Moreover, in this invention, you may include the log | history information update means to update user log | history information based on the acquired sensor information.
また本発明では、利用可能な制御対象機器がない場合には、ユーザ履歴情報を用いた制御対象機器の制御は行われずに、前記履歴情報更新手段によるユーザ履歴情報の更新だけが行われてもよい。また本発明では、利用可能なセンサがない場合には、前記履歴情報更新手段によるユーザ履歴情報の更新は行われずに、ユーザ履歴情報を用いた制御対象機器の制御だけが行われてもよい。このようにすれば、センサ及び制御対象機器の一方が利用不可である場合にも、ユーザ履歴情報の更新や制御対象機器の制御を無駄なく行うことができる。 In the present invention, when there is no control target device that can be used, the control of the control target device using the user history information is not performed, and only the user history information is updated by the history information update unit. Good. In the present invention, when there is no sensor that can be used, only the control of the control target device using the user history information may be performed without updating the user history information by the history information updating unit. In this way, even when one of the sensor and the control target device is unavailable, the user history information can be updated and the control target device can be controlled without waste.
また本発明では、携帯型電子機器の外部の制御対象の制御が可能な外部制御手段を含み、前記外部制御手段は、前記制御対象機器選択手段により制御対象機器が選択された場合に、選択された制御対象機器の制御対象を、ユーザ履歴情報を用いて制御してもよい。このようにすれば、外部制御手段により、制御対象機器の制御対象を直接に制御できる。 The present invention further includes an external control unit capable of controlling an external control target of the portable electronic device, and the external control unit is selected when the control target device is selected by the control target device selection unit. The control target of the control target device may be controlled using the user history information. In this way, the control target of the control target device can be directly controlled by the external control means.
また本発明では、第1のサブシステムのセンサからのセンサ情報によりユーザ履歴情報が更新されたユーザが、第2のサブシステムの制御対象機器である第2の制御対象機器の利用が可能な状態になったことを示す利用可能イベントの発生を判定するイベント判定手段を含み、前記制御対象機器選択手段は、前記利用可能イベントが発生した場合に、前記第2の制御対象機器を選択してもよい。このようにすれば第1のサブシステムにおいて更新されたユーザ履歴情報を用いて、第2のサブシステムにおいて利用可能になった第2の制御対象機器を制御できる。 In the present invention, a user whose user history information is updated by sensor information from the sensor of the first subsystem can use the second control target device that is the control target device of the second subsystem. Event determining means for determining occurrence of an available event indicating that the control target device has been selected, and the control target device selecting means may select the second control target device when the available event occurs. Good. In this way, it is possible to control the second device to be controlled that is available in the second subsystem using the user history information updated in the first subsystem.
また本発明では、前記利用可能イベントが発生した場合に、前記第2のサブシステムのセンサからのセンサ情報に基づいてユーザ履歴情報を更新する履歴情報更新手段を含んでもよい。このようにすればユーザ履歴情報のシームレスな更新を実現できる。 The present invention may further include history information updating means for updating user history information based on sensor information from sensors of the second subsystem when the available event occurs. In this way, seamless update of user history information can be realized.
また本発明では、前記利用可能イベントが発生し、前記第2の制御対象機器が選択された場合に、ユーザ履歴情報を用いた前記第2の制御対象機器の制御動作を開始させる制御処理手段を含んでもよい。 According to the present invention, there is provided control processing means for starting a control operation of the second control target device using user history information when the available event occurs and the second control target device is selected. May be included.
また本発明では、前記制御処理手段は、前記利用可能イベントが発生した場合に、前記第2の制御対象機器の電源をオンにする、或いは前記第2の制御対象機器を低消費電力モードから通常動作モードに復帰させる制御を行ってもよい。このようにすれば、利用可能イベントが発生するまでの間、第2の制御対象機器の電源をオフにしたり、低消費電力モードに設定したりできるため、低消費電力化を図れる。 In the present invention, the control processing means turns on the power of the second control target device when the available event occurs, or sets the second control target device from the low power consumption mode to the normal power consumption mode. Control to return to the operation mode may be performed. In this way, the power of the second control target device can be turned off or set to the low power consumption mode until an available event occurs, so that power consumption can be reduced.
また本発明では、前記制御処理手段は、前記利用可能イベントが発生した場合に、携帯型電子機器の電源をオフにする、或いは携帯型電子機器を通常動作モードから低消費電力モードに移行させる制御を行ってもよい。このようにすれば、利用可能イベントが発生した後は、携帯型電子機器の電源をオフにしたり、低消費電力モードに設定したりできるため、低消費電力化を図れる。 Further, in the present invention, the control processing means controls to turn off the power of the portable electronic device or shift the portable electronic device from the normal operation mode to the low power consumption mode when the available event occurs. May be performed. In this way, the power consumption of the portable electronic device can be turned off or set to the low power consumption mode after an available event occurs, so that the power consumption can be reduced.
また本発明では、前記第2のサブシステムとの間で情報転送を行う情報転送手段を含み、前記制御処理手段は、前記利用可能イベントが発生した場合に、前記情報転送手段については電源をオフにしない、或いは通常動作モードに設定する制御を行ってもよい。このようにすれば、携帯型電子機器の電源がオフになったり低消費電力モードに設定されたりしても、情報転送手段については電源がオフにならない、或いは通常動作モードに設定されるため、携帯型電子機器と第2のサブシステムとの間での情報転送を継続できる。 The present invention further includes information transfer means for transferring information to and from the second subsystem, wherein the control processing means turns off the information transfer means when the available event occurs. It is also possible to perform control for setting to the normal operation mode. In this way, even if the power of the portable electronic device is turned off or set to the low power consumption mode, the information transfer means is not turned off or is set to the normal operation mode. Information transfer between the portable electronic device and the second subsystem can be continued.
また本発明では、前記制御処理手段は、前記第2の制御対象機器をユーザが利用できなくなる利用不可イベントが発生した場合には、前記第2の制御対象機器の電源をオフにする、或いは前記第2の制御対象機器を通常動作モードから低消費電力モードに移行させる制御を行ってもよい。このようにすれば、利用不可イベントが発生した後は、第2の制御対象機器の電源をオフにしたり、低消費電力モードに設定したりできるため、低消費電力化を図れる。 In the present invention, the control processing unit turns off the power of the second control target device when an unusable event occurs in which the user cannot use the second control target device. Control for shifting the second control target device from the normal operation mode to the low power consumption mode may be performed. In this way, after the unusable event occurs, the power of the second device to be controlled can be turned off or set to the low power consumption mode, so that the power consumption can be reduced.
また本発明では、携帯型電子機器が前記第2のサブシステムの制御対象機器に装着された場合に、前記履歴情報記憶手段が携帯型電子機器と前記第2のサブシステムの前記第2の制御対象機器とで共用され、共用された前記履歴情報記憶手段のユーザ履歴情報が、前記第2のサブシステムのセンサからのセンサ情報に基づき更新されてもよい。このようにすれば、第2の制御対象機器に履歴情報記憶手段を設けなくても済むため、第2の制御対象機器の低コスト化等を図れる。 According to the present invention, when the portable electronic device is attached to the device to be controlled of the second subsystem, the history information storage means performs the second control of the portable electronic device and the second subsystem. The user history information of the history information storage means shared and shared with the target device may be updated based on sensor information from the sensor of the second subsystem. In this way, since it is not necessary to provide the history information storage means in the second controlled device, the cost of the second controlled device can be reduced.
また本発明では、前記利用可能イベントが発生した場合に、前記履歴情報記憶手段に記憶されるユーザ履歴情報を、前記第2のサブシステムの第2の履歴情報記憶手段に転送する情報転送手段を含んでもよい。このようにすれば、利用可能イベントが発生した場合に、第2の履歴情報記憶手段に転送されたユーザ履歴情報に基づいて、第2のサブシステムの第2の制御対象機器の制御を行うことが可能になる。 According to the present invention, there is provided information transfer means for transferring user history information stored in the history information storage means to the second history information storage means of the second subsystem when the available event occurs. May be included. In this way, when an available event occurs, the second controlled device of the second subsystem is controlled based on the user history information transferred to the second history information storage means. Is possible.
また本発明では、前記情報転送手段は、前記履歴情報記憶手段に記憶されるユーザ履歴情報と前記第2のサブシステムの第2の履歴情報記憶手段に記憶されるユーザ履歴情報とを、同じ内容の情報に維持する情報同期処理を行ってもよい。このようにすれば、ユーザ履歴情報のシームレスな更新が可能になる。 According to the present invention, the information transfer means has the same contents as the user history information stored in the history information storage means and the user history information stored in the second history information storage means of the second subsystem. Information synchronization processing for maintaining the information may be performed. In this way, the user history information can be updated seamlessly.
また本発明では、前記第2のサブシステムとの間で無線による情報転送を行う情報転送手段を含み、前記イベント判定手段は、前記無線の強度を検出することで、前記利用可能イベントの発生を判定してもよい。このようにすれば、情報転送に必要な無線を、利用可能イベントの判断処理に兼用できる。 Further, the present invention includes information transfer means for wirelessly transferring information to and from the second subsystem, and the event determination means detects the occurrence of the available event by detecting the wireless strength. You may judge. In this way, the radio necessary for information transfer can also be used for the determination process of available events.
また本発明では、前記イベント判定手段は、前記第2のサブシステムにて利用可能なクレードルに携帯型電子機器が接続された場合に、前記利用可能イベントが発生したと判定してもよい。 In the present invention, the event determining means may determine that the available event has occurred when a portable electronic device is connected to a cradle that can be used in the second subsystem.
また本発明では、前記履歴情報記憶手段に記憶されるユーザ履歴情報を、前記第2のサブシステムの第2の履歴情報記憶手段に転送する情報転送手段と、ユーザ履歴情報を用いた前記第2の制御対象機器の制御動作を開始させる制御処理手段を含み、前記イベント判定手段は、前記第2のサブシステムの場所に対するユーザの接近状態を判定し、前記情報転送手段は、接近状態が、第1の接近状態から、前記第1の接近状態よりも接近度合いが高い第2の接近状態になった場合に、前記履歴情報記憶手段に記憶されるユーザ履歴情報を、前記第2のサブシステムの前記第2の履歴情報記憶手段に転送し、前記制御処理手段は、ユーザの接近状態が、前記第2の接近状態から、前記第2の接近状態よりも接近度合いが高い第3の接近状態になった場合に、ユーザ履歴情報を用いた前記第2の制御対象機器の制御動作を開始させてもよい。このようにすれば、第1の接近状態から第2の接近状態になった場合に、ユーザ履歴情報を第2のサブシステム側に転送し、第2の接近状態から第3の接近状態になった場合に、第2の制御対象機器の制御動作を開始でき、情報転送と制御動作の開始をシームレスに実行できる。 In the present invention, the information transfer means for transferring the user history information stored in the history information storage means to the second history information storage means of the second subsystem, and the second using the user history information. Control processing means for starting the control operation of the control target device, wherein the event determining means determines the approaching state of the user to the location of the second subsystem, and the information transfer means is the approaching state, The user history information stored in the history information storage unit is stored in the history information storage means when the first approach state is changed to a second approach state having a higher degree of approach than the first approach state. The control information is transferred from the second approach state to the third approach state having a higher degree of approach than the second approach state. Become When, it may initiate the control operation of the second control target device using the user history information. In this way, when the first approach state is changed to the second approach state, the user history information is transferred to the second subsystem side, and the second approach state is changed to the third approach state. In this case, the control operation of the second device to be controlled can be started, and the information transfer and the start of the control operation can be executed seamlessly.
また本発明では、前記情報転送手段は、ユーザの接近状態が前記第2の接近状態である期間の間、前記履歴情報記憶手段に記憶されるユーザ履歴情報と前記第2のサブシステムの前記第2の履歴情報記憶手段に記憶されるユーザ履歴情報とを、同じ内容の情報に維持する情報同期処理を行ってもよい。 Further, in the present invention, the information transfer means includes user history information stored in the history information storage means and the second subsystem of the second subsystem during a period in which the user approach state is the second approach state. Information synchronization processing may be performed in which the user history information stored in the two history information storage means is maintained as information having the same content.
また本発明では、前記制御処理手段は、ユーザの接近状態が、前記第2の接近状態から前記第1の接近状態になった場合に、ユーザ履歴情報を用いた前記第2の制御対象機器の制御動作を停止させてもよい。このようにすれば、ユーザが離れた場合に、第2の制御対象機器の動作を停止させることができ、低消費電力化を図れる。 In the present invention, the control processing unit may be configured to control the second control target device using user history information when the user approach state changes from the second approach state to the first approach state. The control operation may be stopped. In this way, when the user leaves, the operation of the second control target device can be stopped, and power consumption can be reduced.
また本発明では、前記イベント判定手段は、前記第1、第2、第3の接近状態を、距離による受信状態が異なる少なくとも2種類の無線通信を利用して判断してもよい。このようにすれば、ユーザ履歴情報の転送処理や、第2の制御対象機器の制御動作の開始処理を、距離に応じた受信状態が異なる少なくとも2種類の無線通信を利用して効率的に実現できる。 In the present invention, the event determination unit may determine the first, second, and third approach states by using at least two types of wireless communication that have different reception states depending on distances. In this way, the transfer process of user history information and the start process of the control operation of the second device to be controlled are efficiently realized using at least two types of wireless communication having different reception states according to the distance. it can.
また本発明は、複数のサブシステムの統合システムに用いられ、ユーザにより所持される携帯型電子機器であって、前記複数のサブシステムの複数のセンサの中から、利用可能なセンサを選択するセンサ選択手段と、前記センサ選択手段により選択されたセンサからのセンサ情報を取得する情報取得手段と、ユーザの行動、状態及び環境の少なくとも1つについての履歴情報であって取得されたセンサ情報に基づき更新されるユーザ履歴情報を、記憶する履歴情報記憶手段とを含み、前記センサ選択手段は、時間情報、ユーザの場所情報及びユーザの状況情報の少なくとも1つであるTPO情報に基づいて、前記複数のサブシステムの複数のセンサの中から、ユーザが利用中のサブシステムにおいて利用可能なセンサを選択する携帯型電子機器に関係する。また本発明は、上記各手段としてコンピュータを機能させるプログラム、又は該プログラムを記憶したコンピュータ読み取り可能な情報記憶媒体に関係する。 The present invention is a portable electronic device used in an integrated system of a plurality of subsystems and possessed by a user, and a sensor that selects an available sensor from a plurality of sensors of the plurality of subsystems. Based on the sensor information acquired by the selection means, the information acquisition means for acquiring sensor information from the sensor selected by the sensor selection means, and the history information on at least one of the user's behavior, state and environment History information storage means for storing user history information to be updated, wherein the sensor selection means is based on TPO information that is at least one of time information, user location information, and user status information. A portable electronic device that selects a sensor that can be used in a subsystem being used by a user from among a plurality of sensors in the subsystem Related to. The present invention also relates to a program that causes a computer to function as each of the above-described means, or a computer-readable information storage medium that stores the program.
本発明によれば、複数のサブシステムの複数のセンサの中から、ユーザが利用中のサブシステムにおいて利用可能なセンサが、TPO情報に基づき選択される。そして選択されたセンサからのセンサ情報に基づき更新されるユーザ履歴情報が、履歴情報記憶手段に記憶されるようになる。従って、例えば第1のサブシステムのセンサからのセンサ情報に基づき更新されたユーザ履歴情報を、第2のサブシステムのセンサからのセンサ情報に基づきシームレスに更新できるようになり、統合システムに好適な携帯型電子機器を提供できる。 According to the present invention, a sensor that can be used in a subsystem being used by a user is selected from a plurality of sensors in a plurality of subsystems based on TPO information. Then, the user history information updated based on the sensor information from the selected sensor is stored in the history information storage unit. Therefore, for example, the user history information updated based on the sensor information from the sensor of the first subsystem can be seamlessly updated based on the sensor information from the sensor of the second subsystem, which is suitable for the integrated system. A portable electronic device can be provided.
また本発明では、第1のサブシステムのセンサからのセンサ情報によりユーザ履歴情報が更新されたユーザが、第2のサブシステムのセンサの利用が可能な状態になったことを示す利用可能イベントの発生を判定するイベント判定手段を含み、前記センサ選択手段は、前記利用可能イベントが発生した場合に、ユーザ履歴情報を更新するためのセンサとして、前記第2のサブシステムのセンサを選択してもよい。 Further, in the present invention, an available event indicating that a user whose user history information has been updated with sensor information from the sensor of the first subsystem has become ready to use the sensor of the second subsystem. Event determination means for determining occurrence, and the sensor selection means may select the sensor of the second subsystem as a sensor for updating user history information when the available event occurs. Good.
以下、本実施形態について説明する。なお、以下に説明する本実施形態は、特許請求の範囲に記載された本発明の内容を不当に限定するものではない。また本実施形態で説明される構成の全てが、本発明の必須構成要件であるとは限らない。 Hereinafter, this embodiment will be described. In addition, this embodiment demonstrated below does not unduly limit the content of this invention described in the claim. In addition, all the configurations described in the present embodiment are not necessarily essential configuration requirements of the present invention.
1.統合システム
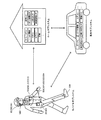
本実施形態の統合システムについて図1を用いて説明する。図1に示すように統合システムは、モバイルサブシステム、ホームサブシステム、或いは車内サブシステムなどの複数のサブシステムにより構成される。なお本実施形態のサブシステムは、これらに限定されず、例えば会社内サブシステム、店内サブシステム、車以外の乗り物(電車、飛行機)のサブシステムなど、センサや制御対象機器を有する種々のサブシステムを考えることができる。
1. Integrated System The integrated system of this embodiment is demonstrated using FIG. As shown in FIG. 1, the integrated system includes a plurality of subsystems such as a mobile subsystem, a home subsystem, or an in-vehicle subsystem. In addition, the subsystem of this embodiment is not limited to these, For example, various subsystems which have a sensor and a control object apparatus, such as a subsystem in a company, a subsystem in a shop, and a subsystem of vehicles (trains, airplanes) other than a car Can think.
図1に示すようにユーザ(使用者)は、携帯型電子機器20(モバイルゲートウェイ)を所持している。またモバイル制御対象機器としてウェアラブルディスプレイ93(モバイルディスプレイ)を頭部の一方の眼の近傍に装着している。更にウェアラブルセンサ(モバイルセンサ)として種々のセンサを身体に身につけている。具体的には、屋内外センサ510、周囲温度センサ511、周辺湿度センサ512、周辺光度センサ513、腕装着型の運動計測センサ520、脈拍(心拍数)センサ521、体温センサ522、抹消皮膚温度センサ523、発汗センサ524、足圧力センサ530、発話・咀嚼センサ540、携帯型電子機器20に設けられるGPS(Global Position System)センサ550、ウェアラブルディスプレイ500に設けられる顔色センサ560や瞳孔の大きさセンサ561などを装着している。これらの携帯型電子機器20、モバイル制御対象機器、ウェアラブルセンサによりモバイルサブシステム(広義には第1のサブシステム)が構成される。
As shown in FIG. 1, a user (user) has a portable electronic device 20 (mobile gateway). Further, a wearable display 93 (mobile display) is mounted as a mobile control target device in the vicinity of one eye of the head. Furthermore, various sensors are worn on the body as wearable sensors (mobile sensors). Specifically, indoor / outdoor sensor 510, ambient temperature sensor 511, ambient humidity sensor 512, ambient light intensity sensor 513, arm-mounted motion measurement sensor 520, pulse (heart rate) sensor 521, body temperature sensor 522, peripheral skin temperature sensor 523, sweat sensor 524,
携帯型電子機器20(モバイルコンピュータ)は、PDA(Personal Digital Assistant)、ノート型PCなどの携帯情報端末であり、例えばプロセッサ(CPU)、メモリ、操作パネル、通信装置、或いはディスプレイ(サブディスプレイ)などを備える。この携帯型電子機器20は、例えばセンサからのセンサ情報を収集する機能、収集したセンサ情報に基づいて演算処理を行う機能、演算結果に基づいて制御対象機器(ウェアラブルディスプレイ等)の制御(表示制御等)を行ったり外部のデータベースから情報を取り込む機能、外部と通信を行う機能などを有することができる。なお携帯型電子機器20は、携帯電話、腕時計、或いはポータブルオーディオなどとして兼用される機器であってもよい。
The portable electronic device 20 (mobile computer) is a portable information terminal such as a PDA (Personal Digital Assistant), a notebook PC, and the like, for example, a processor (CPU), a memory, an operation panel, a communication device, or a display (sub-display). Is provided. The portable
ウェアラブルディスプレイ93は、ユーザの一方の眼の近傍に装着されると共にディスプレイ部の大きさが瞳孔の大きさよりも小さくなるように設定され、いわゆるシースルービューアの情報表示部として機能する。なおユーザへの情報提示は、ヘッドフォン、バイブレータなどを用いて行ってもよい。またモバイル制御対象機器としては、ウェアラブルディスプレイ93以外にも、例えば腕時計、携帯電話、或いはポータブルオーディオなどの種々の機器を想定できる。
The
屋内外センサ510は、ユーザが屋内にいるのか屋外にいるのかを検知するセンサであり、例えば超音波を照射し、天井等により超音波が反射して戻ってくるまでの時間を計測する。但し屋内外センサ510は、超音波方式に限らず、アクティブ光方式、パッシブ紫外線方式、パッシブ赤外線方式、パッシブ騒音方式のセンサであってもよい。 The indoor / outdoor sensor 510 is a sensor that detects whether the user is indoors or outdoors. For example, the user irradiates ultrasonic waves and measures the time until the ultrasonic waves are reflected back from the ceiling or the like. However, the indoor / outdoor sensor 510 is not limited to the ultrasonic method, and may be an active light method, passive ultraviolet method, passive infrared method, or passive noise method sensor.
周囲温度センサ511は、例えばサーミスタ、放射温度計、熱電対などを用いて外界温度を計測する。周辺湿度センサ512は、例えば湿度によって電気抵抗が変化することを利用して周囲の湿度を計測する。周辺光度センサ513は、例えば光電素子を用いて周囲の光度を計測する。 The ambient temperature sensor 511 measures the ambient temperature using, for example, a thermistor, a radiation thermometer, a thermocouple, or the like. The ambient humidity sensor 512 measures the ambient humidity using, for example, the change in electrical resistance due to humidity. The ambient light intensity sensor 513 measures the ambient light intensity using, for example, a photoelectric element.
腕装着型の運動計測センサ520は、加速度センサや角加速度センサでユーザの腕の動きを計測する。この運動計測センサ520と足圧力センサ530を用いることでユーザの日常動作、歩行状態を更に正確に計測できる。脈拍(心拍数)センサ521は、指又は耳に装着し、拍動に伴う血流の変化を赤外光の透過率や反射率の変化で計測する。体温センサ522、抹消皮膚温度センサ523は、サーミスタ、放射温度計、熱電対などを用いてユーザの体温、抹消皮膚温度を計測する。発汗センサ524は、例えば皮膚の表面抵抗の変化により皮膚の発汗を計測する。足圧力センサ530は、靴にかかる足裏の圧力分布を検出して、ユーザの立ち状態、座り状態、歩行状態などを計測、判定する。
The arm-mounted motion measurement sensor 520 measures the movement of the user's arm with an acceleration sensor or an angular acceleration sensor. By using the motion measurement sensor 520 and the
発話・咀嚼センサ540は、ユーザが発話中(会話中)であるか、咀嚼中(食事中)であるかの可能性を計測するためのイヤホン型のセンサであり、その筺体内に骨伝導マイク、外界音マイクが内蔵されている。骨伝導マイクは、発話・咀嚼時に体内から生じ、体内を伝搬する振動である体内音を検出する。外界音マイクは、発話に応じて体外に伝導する振動である音声や、環境の雑音を含む外界音を検出する。そして骨伝導マイク、外界音マイクにより捕らえられた音の単位時間におけるパワーの比較処理等を行うことで、発話可能性や咀嚼可能性を計測する。
The utterance /
GPSセンサ550はユーザの位置を検知するセンサである。なおGPSセンサ550の代わりに携帯電話の位置情報サービスを利用してもよい。顔色センサ560は、例えば顔面近くに光センサを配置し、複数の光学的バンドパスフィルタを通過した後の光度を比較して顔色を計測する。瞳孔の大きさセンサ561は、例えば瞳孔の近くにカメラを配置し、カメラの信号を解析して瞳孔の大きさを計測する。 The GPS sensor 550 is a sensor that detects the position of the user. A location information service of a mobile phone may be used instead of the GPS sensor 550. The face color sensor 560, for example, arranges an optical sensor near the face, and measures the face color by comparing the light intensity after passing through a plurality of optical bandpass filters. The pupil size sensor 561, for example, places a camera near the pupil and analyzes the camera signal to measure the size of the pupil.
ホームサブシステムは、ホーム制御対象機器として、例えば、テレビモニタ、PCモニタなどのホームディスプレイや、オーディオ機器、光ディスクプレーヤなどのホームAV機器や、犬、猫、人型等のロボットや、部屋の温度を調整するエアコンや、明るさを調整する照明などを有する。なおホーム制御対象機器としては、これ以外にも、例えばゲーム機や、掃除機、炊飯器、冷蔵庫、電子レンジなどの家電機器や、セキュリティ装置などの種々の機器を想定できる。 The home subsystem is a home control target device, for example, a home display such as a TV monitor or a PC monitor, a home AV device such as an audio device or an optical disk player, a robot such as a dog, cat, or humanoid, or a room temperature. It has an air conditioner that adjusts the lighting and lighting that adjusts the brightness. In addition to this, as home control target devices, various devices such as home appliances such as game machines, vacuum cleaners, rice cookers, refrigerators, microwave ovens, and security devices can be assumed.
またホームサブシステムは、ホームセンサとして、例えば、ホーム内の気温、湿度、光度、騒音、ユーザの会話、食事などを計測する環境センサや、ロボットに内蔵されるロボット搭載センサや、ホームの各室内、ドアなどに設置される人検知センサや、トイレに設置される尿検査用センサなどを有する。なおホームセンサとしては、これ以外にも、例えばセキュリティセンサ(防犯センサや、熱・煙・ガスセンサ等)、地震センサ、消費電力計測センサ、花粉センサなどの種々のセンサを想定できる。そしてこれらのホーム制御対象機器やホームセンサによりホームサブシステム(広義には第2のサブシステム)が構成される。 In addition, the home subsystem is a home sensor, for example, an environmental sensor that measures the temperature, humidity, light intensity, noise, user conversation, meal, etc. in the home, a robot-mounted sensor built into the robot, And a human detection sensor installed in a door, a urine test sensor installed in a toilet, and the like. In addition to this, various sensors such as a security sensor (a security sensor, a heat / smoke / gas sensor, etc.), an earthquake sensor, a power consumption measuring sensor, a pollen sensor can be assumed as the home sensor. These home control target devices and home sensors constitute a home subsystem (second subsystem in a broad sense).
車内サブシステムは、車内制御対象機器として、道案内を行うカーナビ(ナビゲーション装置)や、オーディオ機器、光ディスクプレーヤなどのカーAV機器や、車内の温度を調整するエアコンなどを有する。なお車内制御対象機器としては、これ以外にも、例えばエアバックなどの安全機器や、シート調整機器や、スマートエントリシステムなどを用いた車のドアの施錠・解錠機器や、通信機器や、車載コンピュータなどの種々の機器を想定できる。 The in-vehicle subsystem includes car navigation systems (navigation devices) that provide road guidance, car AV equipment such as audio equipment and optical disk players, and air conditioners that adjust the temperature inside the car as in-vehicle control target equipment. Other in-vehicle control devices include safety devices such as airbags, seat adjustment devices, car door locking / unlocking devices using smart entry systems, communication devices, in-vehicle devices, etc. Various devices such as a computer can be assumed.
また車内サブシステムは、車内センサとして、車の速度、移動距離などを計測する走行状態センサや、ユーザの運転操作、機器操作を計測する操作状態センサや、車内の気温、湿度、光度、ユーザの会話などを計測する環境センサなどを有する。なお車内センサとしては、これ以外にも、例えば防犯センサ、人検知センサ、花粉センサなどの種々のセンサを想定できる。そしてこれらの車内制御対象機器や車内センサにより車内サブシステム(広義には第3のサブシステム)が構成される。 The in-vehicle subsystem is also used as an in-vehicle sensor such as a driving state sensor that measures the speed of a vehicle, a moving distance, an operation state sensor that measures a user's driving operation and device operation, an in-vehicle temperature, humidity, luminous intensity, It has an environmental sensor that measures conversation and the like. In addition to this, various sensors such as a crime prevention sensor, a human detection sensor, and a pollen sensor can be assumed as the in-vehicle sensor. An in-vehicle subsystem (third subsystem in a broad sense) is configured by these in-vehicle control target devices and in-vehicle sensors.
図1の統合システムでは、ユーザが屋外等にいる場合(モバイル環境の場合)には、モバイルサブシステムのウェアラブルセンサ(モバイルセンサ)からのセンサ情報(センサ2次情報を含む)が取得(収集)され、取得されたセンサ情報に基づいてユーザ履歴情報が更新される。またユーザ履歴情報等に基づいてモバイル制御対象機器の制御が行われる。なおユーザ履歴情報は、ユーザの行動、状態及び環境の少なくとも1つについての履歴情報(ログ情報)である。 In the integrated system of FIG. 1, when the user is outdoors (in a mobile environment), sensor information (including sensor secondary information) is acquired (collected) from the wearable sensor (mobile sensor) of the mobile subsystem. The user history information is updated based on the acquired sensor information. The mobile control target device is controlled based on user history information and the like. The user history information is history information (log information) about at least one of the user's behavior, state, and environment.
一方、ユーザが家にいる場合(ホーム環境の場合)には、ホームサブシステムのホームセンサからのセンサ情報が取得され、取得されたセンサ情報に基づいてユーザ履歴情報が更新される。即ちモバイル環境で更新されたユーザ履歴情報が、ホーム環境に移行した場合にもシームレスに更新される。またユーザ履歴情報等に基づいてホーム制御対象機器の制御が行われる。 On the other hand, when the user is at home (in a home environment), sensor information from the home sensor of the home subsystem is acquired, and the user history information is updated based on the acquired sensor information. That is, the user history information updated in the mobile environment is seamlessly updated even when the user environment information is shifted to the home environment. The home control target device is controlled based on the user history information and the like.
また、ユーザが車内にいる場合(車内環境の場合)には、車内サブシステムの車内センサからのセンサ情報が取得され、取得されたセンサ情報に基づいてユーザ履歴情報が更新される。即ちモバイル環境やホーム環境で更新されたユーザ履歴情報が、車内環境に移行した場合にもシームレスに更新される。またユーザ履歴情報等に基づいて車内制御対象機器の制御が行われる。 Further, when the user is in the vehicle (in the case of an in-vehicle environment), sensor information from the in-vehicle sensor of the in-vehicle subsystem is acquired, and the user history information is updated based on the acquired sensor information. That is, the user history information updated in the mobile environment or the home environment is seamlessly updated even when the user history information is transferred to the in-vehicle environment. Further, the in-vehicle control target device is controlled based on the user history information and the like.
例えばユーザは、家に着いた場合や車内に移動した場合には、ウェアラブルセンサ(屋内外センサ等)やモバイル制御対象機器(ウェアラブルディスプレイ等)を取り外す可能性が高い。このような場合にも図1の統合システムによれば、ウェアラブルセンサの代わりにホームセンサや車内センサを用いてセンサ情報を取得できるため、シームレスなユーザ履歴情報の更新が可能になる。例えば、外出時の食事と家での食事について、食事時刻や食事にかけた時間等の履歴をとり続けることが可能になる他、内外での行動状態や心拍状態に基づく消費エネルギーやストレスの累積演算処理なども可能になる。 For example, when a user arrives at home or moves into a vehicle, the user is likely to remove a wearable sensor (such as an indoor / outdoor sensor) or a mobile control target device (such as a wearable display). Even in such a case, according to the integrated system of FIG. 1, sensor information can be acquired using a home sensor or an in-vehicle sensor instead of a wearable sensor, so that seamless user history information can be updated. For example, for meals when going out and meals at home, it is possible to keep a history of meal times, meal times, etc., and cumulative calculation of energy consumption and stress based on internal and external behavioral status and heart rate status Processing is also possible.
またモバイル制御対象機器の代わりに、ホーム制御対象機器や車内制御対象機器を制御できるようになり、ユーザの利便性を向上できる。例えば表示領域が小さなウェアラブルディスプレイではなく、表示領域が大きなホームディスプレイやカーナビディスプレイに、ユーザ履歴情報等に基づく情報を表示したり、モバイル環境では制御できなかった制御対象機器(例えばエアコン、照明、カーナビ等)を制御できるようになり、利便性を向上できる。 In addition, instead of the mobile control target device, the home control target device and the in-vehicle control target device can be controlled, and the convenience for the user can be improved. For example, information based on user history information, etc. is displayed on a home display or car navigation display with a large display area, not a wearable display with a small display area, or control target devices (for example, air conditioners, lighting, car navigation systems, etc.) that could not be controlled in a mobile environment Etc.) can be controlled, and convenience can be improved.
2.携帯型電子機器
図2に、図1の統合システムに好適な本実施形態の携帯型電子機器20の構成例を示す。なお携帯型電子機器20は、図2の構成には限定されず、その構成要素の一部(例えば情報取得部、情報転送部、操作部、表示制御部、情報記憶媒体等)を省略したり、他の構成要素を追加するなどの種々の変形実施が可能である。
2. Portable Electronic Device FIG. 2 shows a configuration example of the portable
情報取得部30は複数のサブシステムの複数のセンサからのセンサ情報を取得する。例えばモバイルサブシステムのウェアラブルセンサ12(広義には第1のセンサ)、ホームサブシステムのホームセンサ14(広義には第2のセンサ)、車内サブシステムの車内センサ16(広義には第3のセンサ)からのセンサ情報を取得する。具体的には、ユーザの行動(歩行、会話、食事、手足の動き、感情表現又は睡眠等)を計測する行動センサや、ユーザの状態(疲労、緊張、空腹、精神状態、身体状態又はユーザに発生したイベント等)を計測する状態センサや、ユーザの環境(場所、明るさ、気温又は湿度等)を計測する環境センサからのセンサ情報を取得する。
The
なおセンサは、センサデバイス自体であってもよいし、センサデバイスの他に、制御部や通信部等を含むセンサ機器であってもよい。またセンサ情報は、センサから直接得られるセンサ1次情報であってもよいし、センサ1次情報を加工処理(情報処理)することで得られるセンサ2次情報であってもよい。 The sensor may be the sensor device itself, or may be a sensor device including a control unit, a communication unit, and the like in addition to the sensor device. The sensor information may be sensor primary information obtained directly from the sensor, or sensor secondary information obtained by processing (information processing) the sensor primary information.
情報取得部30は例えば通信部32やセンサI/F(インターフェース)部34などにより実現できる。例えば赤外線やブルートゥース(Bluetoothは登録商標)のような近距離無線や無線LANなどによりセンサからセンサ情報を取得(受信)する場合には、通信部32を用いる。一方、USB、IEEE1394、カードI/Fのような有線の電気信号によりセンサからセンサ情報を取得する場合には、センサI/F部34を用いる。
The
処理部40は、操作部80からの操作情報や、情報取得部30で取得されたセンサ情報などに基づいて、携帯型電子機器20の動作等に必要な種々の処理を行う。この処理部40の機能は、各種プロセッサ(CPU等)、ASIC(ゲートアレイ等)などのハードウェアや、情報記憶媒体84に記憶されたプログラムなどにより実現できる。
The
処理部40は、センサ選択部42、制御対象機器選択部44、演算部46、履歴情報更新部48、イベント判定部50、制御処理部52を含むことができる。なおこれらの構成要素の一部を省略したり、他の構成要素を追加してもよい。
The
センサ選択部42はセンサの選択処理を行う。具体的には、複数のサブシステムの複数のセンサの中から、ユーザが利用中のサブシステム(ユーザが所在するサブシステム)において利用可能(アクセス可能、情報取得可能)なセンサを選択する。例えばユーザがホームサブシステム(第2のサブシステム)の場所に移動した場合には、ホームサブシステムにおいて利用可能なホームセンサ14(第2のセンサ、第2のセンサ群)を選択する。またユーザが車内サブシステム(第3のサブシステム)の場所に移動した場合には、車内サブシステムにおいて利用可能な車内センサ16(第3のセンサ、第3のセンサ群)を選択する。
The
更に具体的にはセンサ選択部42は、時間情報(年、月、週、日、時間等)、ユーザの場所情報(位置、所属領域、距離等)及びユーザの状況情報(精神・肉体状態、ユーザに対して発生したイベント等)の少なくとも1つであるTPO(Time Place Occasion)情報に基づいて、複数のセンサの中から利用可能なセンサを選択する。即ち、同じサブシステムにおいても、TPO情報に応じて異なるセンサを選択する。
More specifically, the
なおTPO情報は、センサからのセンサ情報に基づいて取得してもよいし、予定表データ(スケジュール情報)や、インターネットからのダウンロードデータなどに基づいて取得してもよい。またセンサの選択は直接的(能動的)なものであってもよいし、間接的(受動的)なものであってもよい。例えばセンサ自体を直接に選択するのではなく、得られるセンサ情報を選択することで間接的にセンサを選択してもよい。例えば無線によりセンサ情報が通信される場合に、各センサ情報に付加されたタグ情報などに基づいて、利用可能なセンサ情報を選択し、これによりセンサを間接的に選択してもよい。 The TPO information may be acquired based on sensor information from the sensor, or may be acquired based on schedule data (schedule information), download data from the Internet, or the like. The sensor selection may be direct (active) or indirect (passive). For example, instead of directly selecting the sensor itself, the sensor may be selected indirectly by selecting obtained sensor information. For example, when sensor information is communicated wirelessly, available sensor information may be selected based on tag information added to each sensor information, thereby indirectly selecting a sensor.
例えば、屋内では、位置検出にGPSセンサではなく加速度センサを利用した慣性航法を利用する。従って、ユーザが屋内に入ったことがセンサ情報に基づき検出されたとき(例えば、GPSセンサからの位置情報が正しく得られなかったり、屋内にいることを示す情報が屋内外センサにより得られたりしたとき)には、GPSセンサからのセンサ情報を選択せずに、加速度センサからのセンサ情報を選択して位置を演算するようにする。このとき、GPSセンサを停止させることで、省電力化を図ったり、無線のトラフィックを軽減させたり、センサ情報処理の負荷を軽減させたりすることも可能となる。 For example, indoor navigation uses inertial navigation using an acceleration sensor instead of a GPS sensor for position detection. Therefore, when it is detected based on sensor information that the user has entered the room (for example, position information from the GPS sensor cannot be obtained correctly, or information indicating that the user is indoors has been obtained by the indoor / outdoor sensor) Time), the sensor information from the acceleration sensor is selected and the position is calculated without selecting the sensor information from the GPS sensor. At this time, by stopping the GPS sensor, it is possible to save power, reduce wireless traffic, and reduce the load of sensor information processing.
制御対象機器選択部44は制御対象機器の選択処理を行う。具体的には、ユーザ履歴情報を用いた制御が行われる制御対象機器を、複数のサブシステムの複数の制御対象機器の中から選択する。別の言い方をすれば、複数のサブシステムの複数の制御対象機器の中から、ユーザが利用中のサブシステム(ユーザが所在するサブシステム)において利用可能(アクセス可能、制御可能)な制御対象機器を選択する。例えばユーザがホームサブシステム(第2のサブシステム)の場所に移動した場合には、ホームサブシステムにおいて利用可能なホーム制御対象機器94(広義には第2の制御対象機器)を選択する。またユーザが車内サブシステム(第3のサブシステム)の場所に移動した場合には、車内サブシステムにおいて利用可能な車内制御対象機器96(広義には第3の制御対象機器)を選択する。
The control target
更に具体的には制御対象機器選択部44は、TPO情報に基づいて複数の制御対象機器の中から利用可能な制御対象機器を選択する。即ち、同じサブシステムにおいても、TPO情報に応じて異なる制御対象機器を選択する。
More specifically, the control target
なお制御対象機器の選択は直接的(能動的)なものであってもよいし、間接的(受動的)なものであってもよい。例えば制御対象機器自体を直接に選択するのではなく、制御対象機器に必要な情報(データ、信号)を出力することで、間接的にその制御対象機器を選択してもよい。 The selection of the control target device may be direct (active) or indirect (passive). For example, instead of directly selecting the control target device itself, the control target device may be selected indirectly by outputting information (data, signal) necessary for the control target device.
例えば、入浴中は、居間の照明・AV機器の制御や空調制御は不要であり、湯温やバスTV(テレビ)の制御がユーザにとって有効になるので、これらの制御対象機器を選択するようにする。この場合にバスTVには、ホームサーバから映像を配信することも可能であるし、好みの番組を放映しているチャンネル情報のみを送信することも可能である。 For example, during bathing, lighting / AV equipment control and air conditioning control in the living room are not necessary, and control of hot water temperature and bus TV (TV) is effective for the user. To do. In this case, it is possible to distribute video to the bus TV from the home server, or it is also possible to transmit only channel information that broadcasts a favorite program.
演算部46は、情報取得部30により取得されたセンサ情報のフィルタリング処理(選択処理)や解析処理のための種々の演算処理を行う。具体的には演算部46は、センサ情報の乗算処理や加算処理を行う。例えば下式(1)に示すように、複数のセンサからの複数のセンサ情報のデジタル化された計測値Xjと、各係数が係数記憶部(図示せず)に記憶され、2次元行列(マトリックス)で表される係数Aijとの積和演算を行う。そうして下式(2)に示すように、積和演算の結果を多次元座標としてn次元のベクトルYiとして演算する。なお、iはn次元空間のi座標であり、jは各センサに割り当てられる番号である。
The

![]()
![]()
上式(1)(2)のような演算処理を行うことで、取得されたセンサ情報の中から不要なセンサ情報を除去するフィルタリング処理や、ユーザの行動、状態、環境(TPO情報)をセンサ情報に基づき同定するための解析処理などを実現できる。例えば脈拍(心拍数)、発汗量、体温の計測値Xに対して乗算される係数Aを、その他のセンサ情報の計測値に対する係数よりも大きな値に設定すれば、上式(1)(2)で演算された数値Yは、ユーザの状態である「興奮度」を表すものになる。また発話量の計測値Xに対して乗算される係数と、足圧力の計測値Xに対して乗算される係数を適当な値に設定することで、ユーザの行動が、着座して会話しているのか、歩きながら会話しているのか、静かに思考しているのか、睡眠状態なのか等を同定できる。 Filtering processing that removes unnecessary sensor information from the acquired sensor information, and user behavior, state, and environment (TPO information) by performing arithmetic processing such as the above formulas (1) and (2) Analysis processing for identifying based on information can be realized. For example, if the coefficient A multiplied by the measured value X of the pulse (heart rate), the amount of sweat, and the body temperature is set to a value larger than the coefficient for the measured value of other sensor information, the above formulas (1) and (2 The numerical value Y calculated in () represents the “excitability” that is the user's state. In addition, by setting the coefficient multiplied by the measured value X of the utterance amount and the coefficient multiplied by the measured value X of the foot pressure to appropriate values, the user's behavior can sit and talk. You can identify whether you are talking, walking, talking quietly, or sleeping.
履歴情報更新部48は履歴情報の更新処理を行う。具体的には、情報取得部30により取得されたセンサ情報に基づいてユーザ履歴情報を更新する。例えばユーザが第2のサブシステムに移行した場合には、第1のサブシステムで更新されたユーザ履歴情報を、第2のサブシステムの第2のセンサからのセンサ情報に基づき更新する。そして更新されたユーザ履歴情報を履歴情報記憶部62に記憶する。この場合に、履歴情報記憶部62のメモリ容量を節約するために、新しい履歴情報を記憶する場合には、古い履歴情報を削除し、削除により空いた記憶領域に対して新しい履歴情報を記憶してもよい。或いは、各履歴情報に優先度(重み付け係数)を付与し、新しい履歴情報を記憶する場合には、優先度の低い履歴情報を削除してもよい。この場合に、各履歴情報に対する優先度の設定は、その履歴情報に基づいて制御対象機器が制御されたか否かに基づいて決めてもよい。即ち制御対象機器の制御に利用された履歴情報に対しては高い優先度を設定する。こうすれば、メモリ容量を節約しながら、制御対象機器の制御に有効な履歴情報だけを履歴情報記憶部62に残すことが可能になる。もちろん、既に記憶されている履歴情報と新しい履歴情報を演算することで履歴情報を更新(上書き)してもよい。
The history
イベント判定部50は各種のイベントの判定処理を行う。具体的には、第1のサブシステムを利用していたユーザが、新たに第2のサブシステムの利用が可能な状態になったことを示す利用可能イベントの発生を判定する。例えば第1のサブシステム(例えばモバイルサブシステム)のセンサからのセンサ情報によりユーザ履歴情報が更新されたユーザが、第2のサブシステム(例えばホームサブシステム)の第2の制御対象機器の利用が可能な状態になったことを示す利用可能イベント(アクセス可能イベント、制御可能イベント)の発生を判定する。或いは第2の制御対象機器の利用が不可になる利用不可イベントの発生を判定する。例えば携帯型電子機器20と制御対象機器との間の情報転送が無線により行われる場合には、無線強度を検出することで利用可能イベントの発生を判定できる。或いは第2のサブシステムにて利用可能なクレードル(第2のサブシステムの場所に設置されるクレードル)に携帯型電子機器20が接続された場合に、利用可能イベントが発生したと判定してもよい。
The
そして制御対象機器選択部44は、利用可能イベントが発生した場合に、第2の制御対象機器を選択する。また履歴情報更新部48は、利用可能イベントが発生した場合に、第2のサブシステムのセンサからのセンサ情報を取得し、取得されたセンサ情報に基づいてユーザ履歴情報を更新する。
And the control object
なお利用可能イベントが発生した場合にも、制御対象機器の選択が不要である場合には、制御対象機器を選択しないようにしてもよい。即ち利用可能か否かのみならず、選択の必要・不要も判定する。またイベント判定部50は、センサの利用可能イベントの発生についても判定できる。この場合に、制御対象機器の利用可能イベントとセンサの利用可能イベントは、同じイベントであってもよいし、別々のイベントであってもよい。
Even when an available event occurs, if it is not necessary to select a control target device, the control target device may not be selected. That is, not only whether or not it is available but also whether or not selection is necessary is determined. The
制御処理部52は制御対象機器の制御のための種々の処理を行う。例えば利用可能イベントが発生し、第2の制御対象機器が選択された場合に、ユーザ履歴情報を用いた第2の制御対象機器の制御動作を開始させる。例えば第2の制御対象機器の制御部による制御対象の制御を開始させる。或いは利用可能イベントが発生した場合に、第2の制御対象機器の電源をオン(通常動作モード復帰)にする制御(指示)を行ったり、携帯型電子機器20の電源をオフ(低消費電力モード移行)にする制御を行う。或いは、第2の制御対象機器をユーザが利用できなくなる利用不可イベントが発生した場合に、第2の制御対象機器の電源をオフ(低消費電力モード移行)にする制御を行う。
The
記憶部60は、処理部40、情報取得部30、情報転送部70などのワーク領域となるもので、その機能はRAMなどのメモリやHDD(ハードディスクドライブ)などにより実現できる。記憶部60が含む履歴情報記憶部62は、ユーザの行動、状態又は環境等の履歴情報であって、取得されたセンサ情報に基づき更新されるユーザ履歴情報を記憶する。出力情報記憶部64は、情報転送部70によって制御対象機器に転送される出力情報を記憶する。
The
情報転送部(情報出力部)70は、モバイル、ホーム、車内の制御対象機器92、94、96などに対して情報を転送するものであり、その機能は通信部72や機器I/F部74などにより実現できる。例えば無線等の通信により制御対象機器に情報(データ)を転送(送信)する場合には、通信部72を用いる。一方、有線の電気信号により制御対象機器に情報(制御信号)を転送(出力)する場合には、機器I/F部74を用いる。
The information transfer unit (information output unit) 70 transfers information to mobile devices, homes, in-car controlled
操作部80は、ユーザの操作情報を入力するためのものであり、その機能は、キーボードなどの操作パネルや、タッチパネル型ディスプレイなどにより実現できる。表示制御部82は、ディスプレイ(ウェアラブルディスプレイ、サブディスプレイ)に文字、画像等の情報を表示するための表示制御処理を行うものであり、その機能は、グラフィックプロセッサなどにより実現できる。情報記憶媒体(コンピュータにより読み取り可能な媒体)84は、プログラムやデータなどを格納するものであり、その機能は、光ディスク(CD、DVD)などにより実現できる。処理部40は、情報記憶媒体84に格納されるプログラム(データ)に基づいて本実施形態の種々の処理を行う。即ち情報記憶媒体84には、本実施形態の各部としてコンピュータ(操作部、処理部、記憶部、出力部を備える装置)を機能させるためのプログラム(各部の処理をコンピュータに実行させるためのプログラム)が記憶される。
The
次に図3(A)、図3(B)を用いて本実施形態の動作について説明する。図3(A)はセンサの選択処理に関するフローチャートである。 Next, the operation of this embodiment will be described with reference to FIGS. 3 (A) and 3 (B). FIG. 3A is a flowchart regarding sensor selection processing.
まず、センサ情報やスケジュール情報などの、TPOの判定に必要な情報を取得する(ステップS1)。そして取得された情報に基づきユーザのTPOを判定する(ステップS2)。次にセンサ選択部42が、ユーザのTPO情報に基づき利用可能なセンサを選択する(ステップS3)。そして情報取得部30が、選択されたセンサからのセンサ情報を取得する(ステップS4)。次に、履歴情報更新部48が、取得されたセンサ情報に基づきユーザ履歴情報を更新して、更新されたユーザ履歴情報を履歴情報記憶部62に記憶する(ステップS5)。
First, information necessary for TPO determination, such as sensor information and schedule information, is acquired (step S1). Then, the user's TPO is determined based on the acquired information (step S2). Next, the
なおTPO判定用のセンサ情報を取得するためのセンサ選択においては、TPO判定に有効なセンサを選択したり、TPOが変化したことを検出できるセンサを選択すればよい。例えば前述の例では、屋内においては、屋内での位置判定(TPO判定)に有効なセンサである加速度センサを選択する。但し、加速度センサだけでは、屋内から屋外に出てGPSセンサを使えるようになったことを検出できず、センサの再選択ができなくなってしまう。従って、この場合には、前述した屋内外センサも選択しておくことが望ましい。 In sensor selection for acquiring sensor information for TPO determination, a sensor effective for TPO determination or a sensor capable of detecting a change in TPO may be selected. For example, in the above-described example, an acceleration sensor that is an effective sensor for indoor position determination (TPO determination) is selected indoors. However, with only the acceleration sensor, it is impossible to detect that the GPS sensor can be used from the indoor to the outdoor, and the sensor cannot be reselected. Therefore, in this case, it is desirable to select the indoor / outdoor sensor described above.
図3(B)は、制御対象機器の選択処理に関するフローチャートである。まず、センサ情報やスケジュール情報などの、TPOの判定に必要な情報を取得する(ステップS11)。そして取得された情報に基づきユーザのTPOを判定する(ステップS12)。次に制御対象機器選択部44が、ユーザのTPO情報に基づき利用可能な制御対象機器を選択する(ステップS13)。そしてユーザ履歴情報を履歴情報記憶部62から読み出す(ステップS14)。次に情報転送部70が、読み出されたユーザ履歴情報に基づき、選択された制御対象機器への出力情報を出力情報記憶部64から選択し(ステップS15)、選択された出力情報を制御対象機器に出力する(ステップS16)。
FIG. 3B is a flowchart regarding control target device selection processing. First, information necessary for TPO determination, such as sensor information and schedule information, is acquired (step S11). Then, the user's TPO is determined based on the acquired information (step S12). Next, the control target
図3(A)では、ユーザのTPO情報に応じたセンサが選択されるため、場所、時間、状況に応じて異なったセンサを選択できるようになる。従って、どの場所、時間、状況で取得されたセンサ情報なのかに応じて、センサ情報の意味づけを異なったものにすることが可能になり、よりインテリジェントなセンサ情報の取得処理を実現できる。また場所、時間、状況に応じた適切なセンサを選択することで、ユーザ履歴情報の適正な更新が可能になる。 In FIG. 3A, since a sensor corresponding to the user's TPO information is selected, a different sensor can be selected depending on the location, time, and situation. Therefore, the meaning of the sensor information can be made different depending on the location, time, and situation of the sensor information, and more intelligent sensor information acquisition processing can be realized. In addition, the user history information can be appropriately updated by selecting an appropriate sensor according to the place, time, and situation.
例えばホームサブシステムにおいて、ユーザが居間にいる場合には、照明制御や空調制御のために光度センサや気温センサを選択する。一方、ユーザがトイレにいる場合には、ユーザの健康状態の履歴情報を作成するために、尿検査用センサを選択する。またユーザがロボットに近づいた場合には、ユーザに対してロボットを対応させたり、ロボットを利用してユーザの行動の履歴情報を更新するために、ロボット搭載センサを選択する。また昼間の時間帯では、空調制御のために気温センサを選択し、夜中の時間帯では、睡眠中のユーザの体温を測ってユーザの健康状態の履歴情報を作成するために体温センサを選択したり、セキュリティのために防犯センサを選択する。またユーザが忙しい状況である場合には、ユーザをリラックスさせる照明制御のために、光度センサを選択し、ユーザが暇な状況である場合には、ユーザの暇を解消するロボット制御のために、ロボット搭載センサを選択する。 For example, in a home subsystem, when a user is in the living room, a light intensity sensor and an air temperature sensor are selected for lighting control and air conditioning control. On the other hand, when the user is in the toilet, the urinalysis sensor is selected in order to create the history information of the user's health condition. When the user approaches the robot, the robot-mounted sensor is selected in order to make the robot correspond to the user or to update the history information of the user's action using the robot. Also, during daytime hours, an air temperature sensor is selected for air-conditioning control, and during night hours, a body temperature sensor is selected to measure the user's body temperature during sleep and create user's health status history information. Or select security sensors for security. In addition, when the user is in a busy situation, the light intensity sensor is selected for lighting control to relax the user. When the user is in a spare situation, for robot control to eliminate the user's spare time, Select a robot-mounted sensor.
また図3(B)では、ユーザのTPO情報に応じた制御対象機器が選択されるため、場所、時間、状況に応じて異なった制御対象機器を選択できるようになり、よりインテリジェントな機器制御を実現できる。 In FIG. 3B, since the control target device is selected according to the user's TPO information, it becomes possible to select a different control target device according to the location, time, and situation, and more intelligent device control can be performed. realizable.
例えばホームサブシステムにおいて、ユーザが居間にいる場合やユーザが起きている時間帯では、ユーザの暇を解消するために、ホームディスプレイやAV機器やロボットなどの制御対象機器を選択する。或いはユーザが、ホームディスプレイやAV機器やロボットに近づいた場合には、ユーザが近づいた機器を選択する。一方、ユーザが寝室にいる場合や夜中の時間帯では、ユーザの快適な睡眠を実現するために、エアコンや照明などの制御対象機器を選択する。またユーザが元気の無い状況では、ユーザを元気にするためにロボットを選択し、ユーザが忙しい状況では、ユーザをリラックスさせる音楽を流すためにホームAV機器を選択する。 For example, in the home subsystem, when the user is in the living room or in the time zone when the user is waking up, a control target device such as a home display, an AV device, or a robot is selected to eliminate the user's time. Alternatively, when the user approaches the home display, the AV device, or the robot, the device that the user has approached is selected. On the other hand, when the user is in the bedroom or in the night time, a control target device such as an air conditioner or lighting is selected in order to realize a comfortable sleep of the user. In a situation where the user is not energetic, a robot is selected to energize the user, and in a situation where the user is busy, a home AV device is selected to play music for relaxing the user.
図4に、家から車、屋外、屋内を経由して会社に移動した場合において、TPOにより選択されるセンサや制御対象機器の例を更に具体的に示す。 FIG. 4 shows more specifically examples of sensors and control target devices selected by the TPO when moving from a house to a company via a car, outdoors, or indoors.
ユーザが車内の運転席に移動すると、走行状態センサ、操作状態センサ、車内の環境センサ等が選択される。また制御対象機器としてカーナビ、カーAV機器、エアコン、居眠り防止装置等が選択される。 When the user moves to the driver's seat in the vehicle, a running state sensor, an operation state sensor, an in-vehicle environment sensor, and the like are selected. In addition, a car navigation system, a car AV device, an air conditioner, a dozing prevention device, or the like is selected as a control target device.
ユーザが車から屋外に出て、歩行した場合には、GPS、加速度、脈拍等のウェアラブルセンサが選択される。またウェアラブルディスプレイ、モバイルAV機器、携帯電話、腕時計等の制御対象機器が選択される。一方、ユーザが屋内において立ち止まり中である場合には、GPS、加速度、脈拍等のウェアラブルセンサや、屋内に埋め込まれた環境センサが選択される。また制御対象機器として、ユーザの最寄りの端末やディスプレイが選択される。 When the user goes out of the car and walks, wearable sensors such as GPS, acceleration, and pulse are selected. In addition, a control target device such as a wearable display, a mobile AV device, a mobile phone, and a wristwatch is selected. On the other hand, when the user is stationary indoors, wearable sensors such as GPS, acceleration, and pulse, and environment sensors embedded indoors are selected. Further, a terminal or display nearest to the user is selected as the control target device.
ユーザが会社に行って着座すると、脈拍等のウェアラブルセンサや、屋内や職場のデスクに埋め込まれた環境・状態センサや、PCの操作履歴をモニタするためのセンサが選択される。また制御対象機器として、デスクの端末・PCや、照明、空調等が選択される。 When the user goes to the office and sits down, a wearable sensor such as a pulse, an environment / state sensor embedded in an indoor or workplace desk, and a sensor for monitoring the operation history of the PC are selected. Further, a desk terminal / PC, lighting, air conditioning, or the like is selected as the control target device.
以上の本実施形態の手法によれば、ユーザが複数のサブシステム間を移動した場合に、ユーザに対してユーザ履歴情報に応じた適切且つ効果的な情報提供が可能になる。 According to the method of the present embodiment described above, when the user moves between a plurality of subsystems, it is possible to provide the user with appropriate and effective information according to the user history information.
例えば図5(A)において、家に帰宅したユーザは、携帯型電子機器20をクレードル21に接続して、充電等を行っている。このようなクレードル21への接続により、ホームサブシステムの制御対象機器であるロボット300が選択されて起動し、その利用が可能になる。この場合に携帯型電子機器20の履歴情報記憶部62には、モバイル環境において更新されたユーザ履歴情報が記憶されており、ロボット300はこのユーザ履歴情報に基づき制御される。具体的には、ユーザが仕事の帰りに飲み会に行き、同僚との会話で盛り上がったことが、ユーザ履歴情報に基づき判断される。するとロボット300は、ユーザが近づいた時に、例えば「今日の飲み会は盛り上がったようですね」というような発話動作を行う。これによりユーザは、ロボット300がいない場所での自身の行動を、ロボット300が知っている事に対して新鮮味を感じ、ロボット300に愛着を持つことができ、これまでにないロボット制御を実現できる。また例えばユーザ履歴情報に基づき、ユーザが仕事で疲れていたり元気が無いと判断されると、ロボット300はユーザを励ます発話動作を行う。これによりユーザは、あたかも自分の状態を知っているかのように励ましてくれるロボット300に対して更に愛着を持つようになる。
For example, in FIG. 5A, the user who has returned home connects the portable
また、このようにユーザが帰宅すると、ロボット300のみならず、ロボット搭載センサの利用も可能になり、モバイル環境で更新されたユーザ履歴情報を、ロボット搭載センサからのセンサ情報に基づき更新できるようになる。従って、ロボット300の発話に対するユーザの反応を、ロボット搭載の接触センサ等により検知することで、帰宅時のユーザの精神状態等を判断できる。例えば「今日の飲み会は盛り上がったようですね」という対話に対して、ユーザが肯定の反応を示した場合には、「仕事後に飲み会に出かけた」という推定結果が正しいという事を判断でき、より正確なユーザ履歴情報の作成が可能になる。
Further, when the user returns home in this way, not only the
またユーザが帰宅して、例えば周囲温度センサ、周辺湿度センサ、周辺光度センサ、体温センサなどのウェアラブルセンサを取り外した場合に、これらのウェアラブルセンサの代わりにロボット搭載センサを選択することで、ロボット搭載センサにより周囲の温度、湿度、光度、ユーザの体温などを計測できるようになる。従って、ロボット搭載センサからのセンサ情報に基づき、ユーザ履歴情報のシームレスな更新処理が可能になり、より適切で正確なユーザ履歴情報を得ることができる。 Also, when the user comes home and removes wearable sensors such as ambient temperature sensor, ambient humidity sensor, ambient light intensity sensor, and body temperature sensor, the robot mounted sensor can be selected by selecting the robot mounted sensor instead of these wearable sensors. The sensor can measure ambient temperature, humidity, luminous intensity, user body temperature, and the like. Accordingly, seamless update processing of user history information is possible based on sensor information from the robot-mounted sensor, and more appropriate and accurate user history information can be obtained.
図5(B)では、車に乗ったユーザは、携帯型電子機器20を車内に設けられたクレードル21に接続している。このようなクレードル21への接続や近距離無線の通信経路確立により、車内サブシステムの制御対象機器であるナビゲーション装置が選択される。この場合に携帯型電子機器20の履歴情報記憶部62には、モバイル環境やホーム環境において更新されたユーザ履歴情報が記憶されており、このユーザ履歴情報に基づきカーナビディスプレイの制御等が可能になる。具体的には、ユーザの運動量(歩行量)が不足していることが、ユーザ履歴情報に基づき判断されると、図5(C)に示すように、カーナビディスプレイには、ヘルシーな店を勧める案内画面が表示される。これによりユーザは、あたかも自分の行動履歴を知っているかのように反応するナビゲーション装置に新鮮味や驚きを感じ、これまでにないナビゲーション装置を提供できる。またユーザ履歴情報により特定されるユーザの行動履歴が、例えば予定表により特定されるユーザの予定よりも進んでいる場合には、余裕を持った道案内の経路を設定するなどのナビゲーション制御を行ってもよい。
In FIG. 5 (B), the user getting on the car connects the portable
また車内において受信感度が落ちた携帯型電子機器20の内蔵GPSセンサに代えて、ナビゲーション装置のGPSセンサやジャイロセンサを利用して、ユーザの正確な移動履歴を同定して、ユーザ履歴情報を更新できるようになる。従って、モバイル環境やホーム環境からのシームレスなユーザ履歴情報の更新処理が可能になり、より適切で正確なユーザ履歴情報を得ることができる。
Also, instead of using the built-in GPS sensor of the portable
なお本実施形態の手法の適用例は図5(A)〜図5(C)に限定されない。例えば帰宅したユーザが、ウェアラブルディスプレイを取り外し、ホームディスプレイに近づいた場合に、ウェアラブルディスプレイの代わりにホームディスプレイに対して、ユーザ履歴情報やそれに基づく情報を表示してもよい。またユーザ履歴情報によりユーザが精神的に疲れていると判断した場合には、カーAV機器を選択して、癒し系の音楽を流すように制御してもよい。 Note that application examples of the method of the present embodiment are not limited to FIGS. 5 (A) to 5 (C). For example, when the user who returns home removes the wearable display and approaches the home display, the user history information and information based thereon may be displayed on the home display instead of the wearable display. If the user history information determines that the user is mentally tired, the car AV device may be selected and control may be performed to play healing music.
3.ユーザ履歴情報の更新、制御対象機器の制御
次に、ユーザ履歴情報の更新手法や制御対象機器の制御手法の具体例について図6を用いて説明する。
3. User History Information Update and Control Target Device Control Next, a specific example of the user history information update method and the control target device control method will be described with reference to FIG.
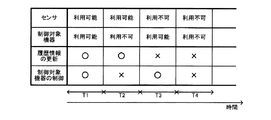
図6において、期間T1ではセンサ及び制御対象機器が共に利用可能になっており、期間T2では制御対象機器が利用不可になっており、期間T3ではセンサが利用不可になっており、期間T4ではセンサ及び制御対象機器が共に利用不可になっている。 In FIG. 6, both the sensor and the control target device are usable in the period T1, the control target device is unavailable in the period T2, the sensor is unavailable in the period T3, and in the period T4. Both the sensor and the control target device are unavailable.
そして期間T2のように、利用可能(選択可能)な制御対象機器がない場合には、ユーザ履歴情報を用いた制御対象機器の制御は行われずに、履歴情報更新部48によるユーザ履歴情報の更新だけが行われる。一方、期間T3のように、利用可能なセンサ(取得可能なセンサ情報)がない場合には、履歴情報更新部48によるユーザ履歴情報の更新は行われずに、ユーザ履歴情報を用いた制御対象機器の制御だけが行われる。なお期間T1のように、制御対象機器もセンサも利用可能である場合には、履歴情報の更新と制御対象機器の制御の両方が行われる。一方、期間T4のように、制御対象機器もセンサも利用不可である場合には、履歴情報の更新も制御対象機器の制御も行われない。
When there is no controllable device that can be used (selectable) as in the period T2, the control of the control target device using the user history information is not performed, and the history
このように図6では、携帯型電子機器20は、利用可能なセンサや制御対象機器があるか否かを検索する。そして利用可能なセンサが検出された場合には、そのセンサ情報を取得して、ユーザ履歴情報を更新する。この時、利用可能な制御対象機器が検出されない場合には、ユーザ履歴情報の更新だけを継続し、制御対象機器の制御動作は行わない。そして利用可能な制御対象機器が検出・選択された時点で、更新されたユーザ履歴情報に基づいて制御対象機器の制御動作を開始する。
As described above, in FIG. 6, the portable
また利用可能なセンサが検出されず、利用可能な制御対象機器だけが検出された場合には、最後に更新されたユーザ履歴情報に基づいて制御対象機器の制御動作だけを行う。そして利用可能なセンサが検出・選択された時点で、ユーザ履歴情報の更新を再開する。 Further, when an available sensor is not detected and only an available control target device is detected, only the control operation of the control target device is performed based on the last updated user history information. Then, when an available sensor is detected and selected, the update of the user history information is resumed.
以上のような手法によれば、センサ及び制御対象機器の一方が利用不可である場合にも、ユーザ履歴情報の更新や制御対象機器の制御を無駄なく継続して行うことが可能になる。 According to the above method, even when one of the sensor and the control target device is unavailable, it is possible to continuously update the user history information and control the control target device without waste.
4.選択状態の監視
携帯型電子機器20がセンサや制御対象機器を選択する場合に、選択される側であるセンサや制御対象機器も、自身が選択状態にあることを認識できることが望ましい。このような選択状態の監視手法について、図7(A)〜図7(C)を用いて説明する。
4). Monitoring of Selected State When the portable
例えば図7(A)では、携帯型電子機器20のセンサ選択部42は、センサ(センサ機器)10の選択状態監視部17に対して所定のプロトコルに従った問いかけを行う。センサ10の選択状態監視部17は、センサ10が利用可能であれば、その旨を所定のプロトコルに従ってセンサ選択部42に返す。
For example, in FIG. 7A, the
このようにしてハンドシェークが成立すると、携帯型電子機器20は、センサ10が利用可能であると判断して、センサ10からのセンサ情報を取り込む。またハンドシェークが成立すると、選択状態監視部17は制御部18を起動し、制御部18は、センサデバイス19を制御して、センサ情報を携帯型電子機器20に対して出力させる。このような構成にすることで、センサ10が選択されるまでの間、センサ10の制御やセンサ情報に基づく処理が不要になり、処理負荷を軽減できる。
When the handshake is established in this way, the portable
図7(B)では、携帯型電子機器20の制御対象機器選択部44は、制御対象機器90の選択状態監視部97に対して所定のプロトコルに従った問いかけを行う。選択状態監視部97は、制御対象機器90が利用可能であれば、その旨を所定のプロトコルに従って制御対象機器選択部44に返す。
In FIG. 7B, the control target
このようにしてハンドシェークが成立すると、携帯型電子機器20は、制御対象機器90が利用可能であると判断して、ユーザ履歴情報やセンサ情報に基づいて制御対象機器90に必要な情報をフィルタリング(選択)して、制御対象機器90の制御部98に出力する。またハンドシェークが成立すると、選択状態監視部97は制御部98を起動し、制御部98は、携帯型電子機器20から出力された情報に基づいて制御対象99を制御する。このような構成にすることで、制御対象機器90が選択されるまでの間、制御対象機器90の制御やそのための情報の出力が不要になり、処理負荷を軽減できる。
When the handshake is established in this way, the portable
図7(C)では、制御対象機器選択部44は、ロボット300の選択状態監視部397に対して所定のプロトコルに従った問いかけを行う。選択状態監視部397は、ロボット300が利用可能であれば、その旨を所定のプロトコルに従って制御対象機器選択部44に返す。
In FIG. 7C, the control target
このようにしてハンドシェークが成立すると、選択状態監視部397はロボット制御部386を起動し、ロボット制御部386は、ロボット搭載センサ310を制御して、センサ情報を携帯型電子機器20に対して出力させる。またロボット制御部386は、ユーザ履歴情報やセンサ情報に基づいて、ロボット動作機構(アクチュエータ、スピーカ、LED等)390を制御する。またハンドシェークが成立すると、携帯型電子機器20は、ロボット300が利用可能であると判断して、ロボット搭載センサ310からのセンサ情報を取り込むと共に、ユーザ履歴情報やセンサ情報に基づいてロボット300に必要な情報をフィルタリングして、ロボット300の制御部386に出力する。このような構成にすることで、ロボット300が選択されるまでの間、選択状態監視部397以外のロボット300の各部を、低消費電力(スリープ)モードに設定でき、省電力化を図れる。
When handshaking is established in this way, the selection
図8(A)では情報転送部70は、履歴情報記憶部62のユーザ履歴情報に基づいて出力情報を選択し、ホームディスプレイ200の表示制御部286や、ロボット300のロボット制御部386に対して出力する。これにより表示制御部286による表示部290の表示制御や、ロボット制御部386によるロボット動作機構390の制御が行われる。また情報転送部70は、車内環境では、カーナビ400の処理部440に対して情報を出力し、これにより処理部440によるカーナビ制御や表示制御部486による表示部490の表示制御が行われる。
In FIG. 8A, the
このとき、例えばホームディスプレイ200にユーザ履歴情報自体を表示する場合には、情報転送部70は、履歴情報記憶部62のユーザ履歴情報の中から表示すべき情報を選択し、選択された情報を表示制御部286に出力する。そして表示制御部286は、表示部290を制御して、選択された文字や画像等の情報を表示させる。
At this time, for example, when displaying the user history information itself on the
一方、図5(A)のようにユーザ履歴情報に基づいてロボット300に発話動作を行わせる場合には、情報転送部70は、出力情報記憶部64の出力情報の中から発話内容を指示する情報を選択し、選択された指示情報をロボット制御部386に出力する。そしてロボット制御部386は、指示情報に基づいて発話内容を決定し、ロボット動作機構390を制御して発話動作を行わせる。なおこの場合に、情報転送部70がユーザの精神状態や身体状態などのパラメータを出力し、ロボット制御部386が、これらのパラメータに基づいて発話内容やロボットの動作を決定して、ロボット動作機構390を制御してもよい。
On the other hand, when the
図8(B)では、携帯型電子機器20は、外部の制御対象の制御が可能な外部制御部71を含む。そして外部制御部71は、制御対象機器選択部44により制御対象機器が選択された場合に、選択された制御対象機器の制御対象を、ユーザ履歴情報を用いて制御する。例えば外部制御部71は、ホームディスプレイ200の表示制御部として機能して、表示部290の表示制御を行う。また外部制御部71は、ロボット300の制御部として機能して、ロボット動作機構390を制御する。また外部制御部71は、カーナビ400の表示制御部として機能して、表示部490の表示制御を行う。このようにすれば、携帯型電子機器20の外部制御部71により、制御対象機器の制御対象を直接に制御して、表示制御や動作制御を行うことが可能になる。
In FIG. 8B, the portable
5.ユーザ履歴情報
次に、ユーザ履歴情報の更新処理やユーザ履歴情報の具体例について説明する。図9は、ユーザ履歴情報の更新処理の一例を示すフローチャートである。
5. User History Information Next, specific examples of user history information update processing and user history information will be described. FIG. 9 is a flowchart illustrating an example of update processing of user history information.
まず、情報取得部30がセンサ情報を取得する(ステップS21)。次に、演算部46が、取得されたセンサ情報のフィルタリングや解析等の演算処理を行う(ステップS22)。そして演算結果に基づきユーザの行動、状態、環境等(TPO、情感)を推定する(ステップS23)。そして履歴情報更新部48が、推定されたユーザの行動、状態等のユーザ履歴を日時(年、月、週、日、時間)等に関連づけて履歴情報記憶部62に記憶して、ユーザ履歴情報を更新する(ステップS24)。
First, the
図10にユーザ履歴情報の具体例が模式的に示される。図10のユーザ履歴情報は、ユーザの行動等の履歴が時間帯、時刻等に関連づけられたデータ構造になっている。例えば8時にユーザは自宅を出発し、8時〜8時20分の時間帯では自宅から駅まで歩行し、8時20分に自宅の最寄りのA駅に到着している。そして8時20分〜8時45分の時間帯では電車に乗車し、8時45分に会社の最寄りのB駅で下車し、9時に会社に到着し、業務を開始している。10時〜11時の時間帯では社内のメンバとミーティングを行い、12時〜13時の時間帯では昼食をとっている。 FIG. 10 schematically shows a specific example of user history information. The user history information in FIG. 10 has a data structure in which a history of user actions and the like is associated with a time zone, a time, and the like. For example, the user departs from home at 8 o'clock, walks from his home to the station in the time zone from 8 o'clock to 8:20, and arrives at the nearest station A at 8:20. And, from 8:20 to 8:45, I got on the train, got off at the nearest B station of the company at 8:45, arrived at the company at 9:00, and started work. During the time zone from 10:00 to 11:00, meetings are held with members in the company, and lunch is served from 12:00 to 13:00.
このように図10では、センサからの情報等により推定されるユーザの行動等の履歴を、時間帯や時刻等に関連づけることで、ユーザ履歴情報が構築されている。 As described above, in FIG. 10, user history information is constructed by associating a history of user behavior or the like estimated based on information from a sensor or the like with a time zone, a time, or the like.
また図10では、時間帯や時刻に対して、センサ等により計測されるユーザの発話量、食事量、脈拍、発汗量等の計測値も関連づけられている。例えば8時〜8時20分の時間帯では、ユーザは自宅からA駅に歩いているが、この時の歩行量等がセンサにより計測されて、8時〜8時20分の時間帯に関連づけられる。この場合に、例えば歩行速度、発汗量等の歩行量以外のセンサ情報の計測値を更に関連づけてもよい。こうすることで、この時間帯でのユーザの運動量等を把握することが可能になる。 In FIG. 10, measurement values such as a user's utterance amount, a meal amount, a pulse rate, and a sweat amount, which are measured by a sensor or the like, are also associated with the time zone and time. For example, in the time zone from 8:00 to 8:20, the user is walking from the home to the station A, but the walking amount at this time is measured by the sensor and is associated with the time zone from 8:00 to 8:20. It is done. In this case, for example, measurement values of sensor information other than the walking amount such as walking speed and sweating amount may be further associated. By doing so, it becomes possible to grasp the user's momentum and the like in this time zone.
10時〜11時の時間帯では、ユーザは同僚とのミーティングを行っているが、この時の発話量等がセンサにより計測されて、10時〜11時の時間帯に関連づけられる。この場合に、例えば音声状態、脈拍等のセンサ情報の計測値を更に関連づけてもよい。こうすることで、この時間帯でのユーザの会話量や緊張度等を把握することが可能になる。 In the time zone from 10 o'clock to 11 o'clock, the user is having a meeting with a colleague, and the amount of speech, etc. at this time is measured by a sensor and correlated with the time zone from 10 o'clock to 11 o'clock. In this case, for example, measurement values of sensor information such as a voice state and a pulse may be further associated. By doing so, it becomes possible to grasp the user's conversation volume, degree of tension, and the like during this time period.
20時45分〜21時45分や22時〜23時の時間帯では、ユーザはゲームをプレイしたり、テレビを鑑賞しているが、この時の脈拍、発汗量等がこれらの時間帯に関連づけられる。こうすることで、これらの時間帯でのユーザの興奮度等を把握することが可能になる。 In the time zone from 20:45 to 21:45 or from 22:00 to 23:00, the user is playing a game or watching TV, but the pulse, sweating amount, etc. at this time are in these time zones. Associated. By doing so, it becomes possible to grasp the degree of excitement of the user in these time zones.
23時30分〜の時間帯では、ユーザは睡眠をしているが、この時のユーザの体温の変化がこの時間帯に関連づけられる。こうすることで、睡眠時におけるユーザの健康状態を把握することが可能になる。 In the time zone from 23:30, the user is sleeping, but a change in the user's body temperature at this time is associated with this time zone. By doing so, it becomes possible to grasp the health condition of the user during sleep.
なお、ユーザ履歴情報は図10のような形態に限定されず、例えばユーザの行動等の履歴を日時等に関連づけないでユーザ履歴情報を構築する変形実施も可能である。 Note that the user history information is not limited to the form as shown in FIG. 10. For example, the user history information can be modified without associating the history of user behavior with the date and time.
例えば図11(A)では、センサ情報の計測値である発話量、音声状態、脈拍、発汗量等に基づいて、所定の演算式にしたがってユーザの精神状態パラメータが演算される。例えば発話量が多ければ、精神状態パラメータも高くなり、ユーザの精神状態が良好であることが示される。またセンサ情報の計測値である歩行量、歩行速度、体温等に基づいて、所定の演算式にしたがってユーザの身体状態(健康状態)のパラメータ(運動量パラメータ)が演算される。例えば歩行量が多ければ、身体状態パラメータも高くなり、ユーザの身体状態が良好であることが示される。 For example, in FIG. 11A, the mental state parameter of the user is calculated according to a predetermined calculation formula based on the utterance amount, the voice state, the pulse rate, the sweating amount, etc., which are measured values of the sensor information. For example, if the utterance amount is large, the mental state parameter also becomes high, indicating that the user's mental state is good. In addition, based on a walking amount, walking speed, body temperature, and the like, which are measurement values of sensor information, a user body condition (health state) parameter (exercise amount parameter) is calculated according to a predetermined calculation formula. For example, if the amount of walking is large, the body condition parameter also increases, indicating that the user's body condition is good.
図11(B)に示すように、ユーザの精神状態、身体状態のパラメータ(広義には状態パラメータ)は、棒グラフ等を利用して可視化することで、ウェアラブルディスプレイやホームディスプレイやカーナビディスプレイに表示できる。従って本実施形態によれば、例えばモバイル環境において更新された精神状態、身体状態のパラメータなどのユーザ履歴情報を用いて、ホーム環境におけるホームディスプレイや、車内環境におけるカーナビディスプレイに対して、図11(B)のようにパラメータを可視化して表示することが可能になる。或いはモバイル環境で更新された精神状態、身体状態のパラメータなどに基づいて、ホーム環境のロボットを制御して、ユーザを励ましたり、ユーザに助言する動作をロボットに行わせることも可能になる。或いは車内環境において、ユーザの精神状態、身体状態のパラメータに応じたナビゲーションを行ったり、音楽を流すことも可能になる。 As shown in FIG. 11B, the mental state and body state parameters (state parameters in a broad sense) of the user can be displayed on a wearable display, a home display, or a car navigation display by using a bar graph or the like. . Therefore, according to the present embodiment, the user history information such as the mental state and body state parameters updated in the mobile environment, for example, is used for the home display in the home environment and the car navigation display in the in-car environment as shown in FIG. The parameter can be visualized and displayed as in B). Alternatively, the robot in the home environment can be controlled based on the mental state and body state parameters updated in the mobile environment to encourage the user or to allow the robot to perform an operation that advises the user. Alternatively, in the in-vehicle environment, navigation according to the parameters of the user's mental state and physical state and music can be played.
6.センサ、制御対象機器の選択
次に、センサや制御対象機器の選択手法の具体例について説明する。なお、以下では、説明を簡明にするため、第1のサブシステムがモバイルサブシステムであり、第2のサブシステムがホームサブシステム(ロボット)である場合を主に例にとり説明するが、本実施形態はこれに限定されるものではない。
6). Selection of Sensor and Control Target Device Next, a specific example of a method for selecting a sensor and a control target device will be described. In the following, in order to simplify the description, the case where the first subsystem is a mobile subsystem and the second subsystem is a home subsystem (robot) will be mainly described as an example. The form is not limited to this.
例えば図12(A)に示すように、ユーザがモバイル環境にいる場合に、イベント判定部50が、ウェアラブルセンサ12、モバイル制御対象機器92の利用が可能であると判定すると、センサ選択部42がウェアラブルセンサ12を選択し、制御対象機器選択部44がモバイル制御対象機器92を選択する。そして履歴情報更新部48が、ウェアラブルセンサ12からのセンサ情報に基づいてユーザ履歴情報を更新する。また制御処理部52が、モバイル制御対象機器92の制御動作を開始させる。
For example, as shown in FIG. 12A, when the user is in a mobile environment, if the
一方、図12(B)では、ユーザがモバイル環境からホーム環境に移動し、イベント判定部50が、ホームセンサ14、ホーム制御対象機器94の利用が可能であるか否かを判定する。そして利用可能である場合には、センサ選択部42がホームセンサ14を選択し、制御対象機器選択部44がホーム制御対象機器94を選択する。また履歴情報更新部48が、ホームセンサ14からのセンサ情報に基づいてユーザ履歴情報を更新する。また制御処理部52がホーム制御対象機器94の制御動作を開始させる。
On the other hand, in FIG. 12B, the user moves from the mobile environment to the home environment, and the
このように図12(A)、図12(B)では、ユーザがモバイル環境にいる場合にも、ホーム環境にいる場合にも、携帯型電子機器20が、センサ情報に基づく履歴情報の更新や制御対象機器の制御を行っている。
As described above, in FIGS. 12A and 12B, the portable
しかしながら、ユーザがホーム環境にいる場合には、携帯型電子機器20を取り外す可能性が高い。またホーム環境においても携帯型電子機器20を常時動作させると、携帯型電子機器20の電力が無駄に消費されてしまう。
However, when the user is in the home environment, there is a high possibility that the portable
そこで図13(A)〜図14では、ユーザがモバイル環境(第1のサブシステムの環境)からホーム環境(第2のサブシステムの環境)に移動した場合に、携帯型電子機器20を停止させる等の制御を行っている。
Therefore, in FIGS. 13A to 14, the portable
例えば図13(A)では、ユーザがモバイル環境にいるため、モバイル側は電源オン(或いは通常動作モード)になっており、ホーム制御対象機器94は電源オフ(或いは低消費電力モード)になっている。なおモバイル側、ホーム側の情報転送部70、170は、常時、電源オン(通常動作モード)になっている。
For example, in FIG. 13A, since the user is in a mobile environment, the mobile side is powered on (or normal operation mode), and the home
そしてモバイル側の制御対象機器選択部44がモバイル制御対象機器92を選択し、選択されたモバイル制御対象機器92の制御が行われる。またモバイル側のセンサ選択部42がウェアラブルセンサ12を選択し、モバイル側の履歴情報更新部48がウェアラブルセンサ12からのセンサ情報に基づきユーザ履歴情報を更新する。
Then, the mobile control target
一方、図13(B)では、ユーザがモバイル環境からホーム環境に移動している。この場合には、ホーム制御対象機器94の利用が可能か否かが判定され、利用可能である場合には、ホーム制御対象機器94が電源オン(通常動作モード)になる。そしてモバイル側の情報転送部70が、履歴情報記憶部62からユーザ履歴情報を読み出して、ホーム側に転送する。するとホーム側の情報転送部170が、このユーザ履歴情報を受けて、履歴情報記憶部162に書き込む。そしてホームセンサ14が選択されて、ホームセンサ14からのセンサ情報に基づくユーザ履歴情報の更新が開始する。またユーザ履歴情報を用いたホーム制御対象機器94の制御が開始する。そしてモバイル側が電源オフ(低消費電力モード)になる。
On the other hand, in FIG. 13B, the user has moved from the mobile environment to the home environment. In this case, it is determined whether or not the home
図14では、ユーザがホーム環境からモバイル環境に戻っている。この場合には、モバイル側が電源オン(通常動作モード)になる。そしてホーム側の情報転送部170が、履歴情報記憶部162からユーザ履歴情報を読み出して、モバイル側に転送する。するとモバイル側の情報転送部70が、このユーザ履歴情報を受けて、履歴情報記憶部62に書き込む。そしてホーム制御対象機器94が電源オフ(低消費電力モード)になる。
In FIG. 14, the user has returned from the home environment to the mobile environment. In this case, the mobile side is turned on (normal operation mode). Then, the home-side
図13(A)〜図14の手法によれば、ユーザがモバイル環境にいる場合には、ホーム制御対象機器94(或いはホームサブシステム)が電源オフ(低消費電力モード)になり、ユーザがホーム環境にいる場合には、モバイル側が電源オフになるため、モバイル側やホーム側の低消費電力化を図れる。そしてこの場合に、図13(B)や図14に示すようにユーザ履歴情報を転送すれば、ユーザがサブシステム間を移動した場合にも、ユーザ履歴情報のシームレスな更新が可能になる。またユーザがモバイル環境にいる場合にも、ホーム環境にいる場合にも、情報転送部70、170は、常時、電源オン(通常動作モード)になっているため、ユーザ履歴情報の転送処理やユーザ環境変化の監視処理を適正に実現できる。
13A to 14, when the user is in a mobile environment, the home control target device 94 (or home subsystem) is turned off (low power consumption mode), and the user is at home. When in the environment, the mobile side is powered off, so the power consumption on the mobile side and the home side can be reduced. In this case, if the user history information is transferred as shown in FIGS. 13B and 14, even if the user moves between subsystems, the user history information can be updated seamlessly. Even when the user is in a mobile environment or a home environment, the
なおユーザがモバイル環境からホーム環境に移動した場合における、利用可能イベント発生の判断、ホーム制御対象機器94やホームセンサ14の選択、或いはホーム制御対象機器94の制御動作の開始等の処理は、ホーム側とモバイル側の共同動作により実現してもよいし(例えば図7(A)〜図7(C))、ホーム側の単独動作により実現してもよい。
When the user moves from the mobile environment to the home environment, processing such as determination of occurrence of an available event, selection of the home
図15は、図13(A)〜図14の手法の詳細な処理例を示すフローチャートである。まず、ホーム制御対象機器94の利用が可能になったか否かを判断する(ステップS31)。そして利用可能になった場合には、そのホーム制御対象機器94を選択し(ステップS32)、選択されたホーム制御対象機器94の電源をオンにする(ステップS33)。或いは低消費電力モードから通常動作モードに復帰させる。
FIG. 15 is a flowchart showing a detailed processing example of the method of FIGS. First, it is determined whether or not the home
次に、ユーザ履歴情報を履歴情報記憶部62からホームサブシステムの履歴情報記憶部162に転送する(ステップS34)。そしてホームセンサ14からのセンサ情報を用いたユーザ履歴情報の更新を開始する(ステップS35)。またユーザ履歴情報を用いたホーム制御対象機器94の制御動作を開始する(ステップS36)。
Next, the user history information is transferred from the history
次に携帯型電子機器20の電源をオフにする(ステップS37)。或いは低消費電力モードに移行させる。但し情報転送部(通信部)70は常時電源オン(通常動作モード)のままにする。
Next, the portable
こうして、次に、ホーム制御対象機器94の利用が不可になった否かを判断する(ステップS38)。ホーム制御対象機器94の利用が可能な間は、ホームセンサ14からのセンサ情報を用いたユーザ履歴情報の更新とこれを用いたホーム制御対象機器94の制御動作を継続する。そして利用不可になった場合には、携帯型電子機器20の電源をオンにする(ステップS39)。或いは低消費電力モードから通常動作モードに復帰させる。そしてユーザ履歴情報をホームサブシステムの履歴情報記憶部162から携帯型電子機器20の履歴情報記憶部62に転送する(ステップS40)。そしてホーム制御対象機器94の電源をオフにする(ステップS41)。或いは低消費電力モードに移行させる。
Thus, next, it is determined whether or not the use of the home
7.履歴情報記憶部等の共用
次に履歴情報記憶部等の共用手法について説明する。例えば図16(A)では、犬型のロボット300の口の部分が携帯型電子機器20のクレードルになっている。そしてユーザが携帯型電子機器20をロボット300の口の部分に装着すると、ホーム制御対象機器であるロボット300のユーザ履歴情報を用いた制御動作が開始される。
7). Sharing of History Information Storage Unit, etc. Next, a sharing method of the history information storage unit and the like will be described. For example, in FIG. 16A, the mouth portion of the dog-shaped
図16(B)に図16(A)の手法を実現するシステムの構成例を示す。携帯型電子機器20がロボット300に装着されていない状態では、携帯型電子機器20の履歴情報記憶部62のユーザ履歴情報は、ウェアラブルセンサ12からのセンサ情報に基づき更新される。また携帯型電子機器20の制御部86は、ウェアラブルディスプレイ93などのモバイル制御対象機器を制御する。
FIG. 16B shows a configuration example of a system that realizes the technique of FIG. When the portable
一方、ロボット300に携帯型電子機器20が装着されると、F1、F2に示すような切り替えが行われ、履歴情報記憶部62、制御部86が、モバイルサブシステムとホームサブシステムで共用される。即ちこの場合には、ロボット搭載センサ310と履歴情報記憶部62とが電気信号等を介して電気的に接続され、履歴情報記憶部62のユーザ履歴情報は、ウェアラブルセンサ12の代わりに、ロボット搭載センサ310からのセンサ情報に基づき更新される。また制御部86は、ウェアラブルディスプレイ93の代わりに、制御対象であるロボット動作機構390を制御する。
On the other hand, when the portable
このように図16(A)、図16(B)では、携帯型電子機器20がホームサブシステム(第2のサブシステム)のロボット300(制御対象機器)に装着された場合に、履歴情報記憶部62が、携帯型電子機器20とホームサブシステムのロボット300とで共用される。そして共用された履歴情報記憶部62のユーザ履歴情報が、ホームサブシステムのセンサであるロボット搭載センサ310からのセンサ情報に基づき更新される。
As described above, in FIGS. 16A and 16B, when the portable
図16(A)、図16(B)の手法によれば、ロボット300に対して履歴情報記憶部を設けなくても済むため、ロボット300の低コスト化を図れる。特に、履歴情報記憶部62が、大容量のメモリやHDDで構成される場合には、共用のメリットは大きい。またユーザ履歴情報の更新は、携帯型電子機器20に設けられた履歴情報記憶部62に対してだけ行えばよく、ロボット側において履歴情報を更新する必要がないため、処理を簡素化できる。更に制御部86についてもモバイル側とロボット側で共用できるため、更なる低コスト化、処理の簡素化を図れる。
According to the method of FIGS. 16A and 16B, since it is not necessary to provide a history information storage unit for the
図17は、図16(A)、図16(B)の手法の詳細な処理例を示すフローチャートである。まずロボット300が利用可能になったか否かを判断する(ステップS51)。具体的には、ロボット300に携帯型電子機器20が装着されたり、近距離無線により携帯型電子機器20の近接が検知されると、ロボット300が利用可能になったと判断される。そしてロボット300が利用可能になると、ロボット300を起動する(ステップS52)。
FIG. 17 is a flowchart showing a detailed processing example of the method of FIGS. 16 (A) and 16 (B). First, it is determined whether or not the
次に、モバイル側のウェアラブルディスプレイ93、ウェアラブルセンサ12を停止する(ステップS53)。そして携帯型電子機器20の制御部86によりロボット動作機構390を制御する(ステップS54)。また、共用の記憶部に設定された履歴情報記憶部62のユーザ履歴情報を、ロボット搭載センサ310からのセンサ情報を用いて更新する(ステップS55)。
Next, the
次に、ロボット300が利用不可になったか否かを判断する(ステップS56)。具体的には、ロボット300から携帯型電子機器20が取り外されたり、近距離無線により携帯型電子機器20が離れたことが検知されると、ロボット300が利用不可になったと判断される。そして利用不可になった場合には、ウェアラブルディスプレイ93、ウェアラブルセンサ12を起動する(ステップS57)。そしてロボット300を停止する(ステップS58)。
Next, it is determined whether or not the
8.無線を利用したユーザ履歴情報の転送
次に無線を利用したユーザ履歴情報の転送手法について説明する。図18にこの手法を実現するシステムの構成例を示す。
8). Transferring User History Information Using Wireless Next, a method for transferring user history information using wireless will be described. FIG. 18 shows a configuration example of a system that realizes this technique.
図18では、携帯型電子機器20、ロボット300に情報転送部70、370が設けられ、その通信部(通信モジュール)72、372により、無線による情報転送が行われる。例えば情報転送部70は、制御対象機器であるロボット300の利用可能イベントが発生すると、モバイル側の履歴情報記憶部62に記憶されるユーザ履歴情報を、ホーム側の履歴情報記憶部362(第2の履歴情報記憶部)に転送する。
In FIG. 18,
この場合に情報転送部70(情報転送部370)はユーザ履歴情報の情報同期処理を行う。具体的には、モバイル側の履歴情報記憶部62に記憶されるユーザ履歴情報と、ホーム側の履歴情報記憶部362に記憶されるユーザ履歴情報を、同じ内容の情報に維持する情報同期処理を行う。情報同期処理は、現在利用しているサブシステムの履歴情報を、新しく利用できる状況になったサブシステムの履歴情報に上書きすることで行う。例えばモバイル側を現在利用していて、新たにホーム側が利用可能になった時には、ホーム側の履歴情報に対してモバイル側の履歴情報を上書きする。逆の場合には、モバイル側の履歴情報に対してホーム側の履歴情報を上書きする。このようにすれば、最新のユーザ履歴情報が履歴情報記憶部62、362に維持されて記憶されるようになり、ユーザが複数のサブシステム間で移動した場合にも、ユーザ履歴情報のシームレスで適切な更新が可能になる。
In this case, the information transfer unit 70 (information transfer unit 370) performs information synchronization processing of user history information. Specifically, an information synchronization process for maintaining the user history information stored in the mobile history
また図18では情報転送が無線により行われる。具体的には、例えば無線LANや、近距離無線通信である微弱無線、ブルートゥース、赤外線等により情報転送が実現される。そしてこの場合には、無線の強度を検出することで、ロボット300(制御対象機器)の利用可能イベントの発生を判定できる。具体的には携帯型電子機器20とロボット300が近接すると、無線強度が強くなり、これによりロボット300が利用可能になったと判断できる。一方、携帯型電子機器20とロボット300が離れると、無線強度が小さくなり、これによりロボット300は利用不可になったと判断できる。このような手法を用いれば、情報転送に必要な無線を、利用可能イベントや利用不可イベントの判断処理に兼用できる。
In FIG. 18, information transfer is performed wirelessly. Specifically, information transfer is realized by, for example, wireless LAN, weak wireless that is short-range wireless communication, Bluetooth, infrared rays, or the like. In this case, the occurrence of an available event of the robot 300 (control target device) can be determined by detecting the wireless strength. Specifically, when the portable
図19(A)では、帰宅するためにユーザが家に向かって移動している。この場合に図19(B)に示すように、家を中心としたエリア1、2、3が設定されている。
In FIG. 19A, the user is moving toward the house to go home. In this case, as shown in FIG. 19B,
ここでエリア1は、無線LAN等(近距離無線通信と区別するために、ここでは以降、遠距離無線通信と呼ぶ)の有効範囲外のエリアであり、携帯型電子機器20が単独で動作するエリアである。エリア2は、遠距離無線通信の有効範囲内のエリアであり、ユーザ履歴情報の転送処理(情報同期処理)が行われるエリアである。エリア3は、ブルートゥース等の近距離無線通信の有効範囲内のエリアであり、ロボット300(広義にはホーム制御対象機器)が単独で動作するエリアである。なおエリア2は、近距離無線通信の有効範囲外のエリアになっている。
Here,
例えばユーザがエリア1からエリア2に入ると、ロボット300が起動し、モバイル側の履歴情報記憶部62からホーム側の履歴情報記憶部362にユーザ履歴情報を転送(ロード)する。またユーザがエリア2からエリア3に入ると、携帯型電子機器20を停止し、ロボット300の単独動作に切り替える。
For example, when the user enters the
一方、ユーザがエリア3からエリア2に入ると、携帯型電子機器20を起動し、ホーム側の履歴情報記憶部362からモバイル側の履歴情報記憶部62にユーザ履歴情報を転送する。またユーザがエリア2からエリア1に入ると、ロボット300を停止し、携帯型電子機器20の単独動作に切り替える。
On the other hand, when the user enters the
即ち図19(B)では、イベント判定部50等がホームサブシステム(第2のサブシステム)の場所に対するユーザの接近状態を判定する。そして情報転送部70は、接近状態が、第1の接近状態(エリア1)から、第1の接近状態よりも接近度合いが高い第2の接近状態(エリア2)になった場合に、履歴情報記憶部62に記憶されるユーザ履歴情報を、ホーム側の履歴情報記憶部362に転送する。そして制御処理部52は、ユーザの接近状態が、第2の接近状態(エリア2)から、第2の接近状態よりも接近度合いが高い第3の接近状態(エリア3)になった場合に、ユーザ履歴情報を用いたロボット300(第2の制御対象機器)の制御動作を開始させる。
That is, in FIG. 19B, the
更に情報転送部70(情報転送部370)は、ユーザの接近状態が第2の接近状態(エリア2)である期間の間、履歴情報記憶部62に記憶されるユーザ履歴情報と履歴情報記憶部362に記憶されるユーザ履歴情報とを、同じ内容の情報に維持する情報同期処理を行う。即ちユーザの接近状態が第1の接近状態(エリア1)から第2の接近状態(エリア2)になった場合には、モバイル側からホーム側にユーザ履歴情報を転送し、第3の接近状態(エリア3)から第2の接近状態(エリア2)になった場合には、ホーム側からモバイル側にユーザ履歴情報を転送する。そしてユーザの接近状態が、第2の接近状態(エリア2)から第1の接近状態(エリア1)になった場合には、ユーザ履歴情報を用いたロボット300の制御動作を停止する。
Further, the information transfer unit 70 (information transfer unit 370) is configured to store the user history information and the history information storage unit stored in the history
なお、これらの第1、第2、第3の接近状態(エリア1、2、3)は、例えば遠距離無線通信と近距離無線通信で判断できる。即ち近距離無線及び遠距離無線によりユーザ(携帯型電子機器)が検知された場合には、ユーザはエリア3(第3の接近状態)にいると判断できる。また近距離無線ではユーザを検知できないが、遠距離無線でユーザを検知できた場合には、ユーザはエリア2(第2の接近状態)にいると判断できる。また近距離無線でも遠距離無線でもユーザを検知できなかった場合には、ユーザはエリア1(第1の接近状態)にいると判断できる。このように、距離による受信状態が異なる少なくとも2種類の無線通信(例えば有効到達距離が異なる少なくとも2種類の無線通信)を利用することで、携帯型電子機器20やロボット300の起動、停止制御や、ユーザ履歴情報の転送処理を効率的に実現できる。
In addition, these 1st, 2nd, 3rd approach states (
なお図19(A)、図19(B)では、近距離無線、遠距離無線という2種類の無線を利用した場合を示しているが、3種類以上の無線を利用してもよい。 19A and 19B show the case where two types of radio, short-range radio and long-range radio, are used, three or more types of radio may be used.
図20は、図19(A)、図19(B)の手法の詳細な処理例を示すフローチャートである。まず、近接状態が変化したか否かを判断し(ステップS61)、変化していない場合には所定時間毎にポーリングを行う(ステップS62)。一方、変化した場合には、ユーザがエリア2に入ったか否かを判断し(ステップS63)、入った場合には、エリア1側からエリア2に入ったか否かを判断する(ステップS64)。
FIG. 20 is a flowchart showing a detailed processing example of the method of FIGS. 19 (A) and 19 (B). First, it is determined whether or not the proximity state has changed (step S61). If it has not changed, polling is performed every predetermined time (step S62). On the other hand, if it has changed, it is determined whether or not the user has entered area 2 (step S63). If so, it is determined whether or not the user has entered
エリア1側からエリア2に入った場合には、ロボット側(通信部以外の各部)を起動する(ステップS65)。そしてユニット間のハンドシェークを行い(ステップS66)、モバイル側からロボット側にユーザ履歴情報を転送する(ステップS67)。
When the
一方、エリア1側ではなくエリア3側からエリア2に入った場合には、モバイル側を起動する(ステップS68)。そしてユニット間のハンドシェークを行い(ステップS69)、ロボット側からモバイル側にユーザ履歴情報を転送する(ステップS70)。
On the other hand, when entering the
ステップS63で、ユーザがエリア2に入っていないと判断された場合には、エリア1に入ったか否かが判断される(ステップS71)。そしてエリア1に入った場合には、ロボット側(通信部以外)を停止する(ステップS72)。一方、ユーザがエリア1に入っていない場合には、エリア3にいると判断し、モバイル側(通信部以外)を停止する(ステップS73)。
If it is determined in step S63 that the user is not in
9.システム構成例
図21(A)、図21(B)、図22に本実施形態の種々のシステム構成例を示す。図21(A)のシステムでは、携帯型電子機器20とホームサーバ120は無線LANやクレードル等で通信接続され、ホームサーバ120とロボット300は無線LAN等で通信接続される。そして携帯型電子機器20を所持したユーザが家に近づくと、無線LANにより携帯型電子機器20とホームサーバ120の間の通信が可能になる。或いは携帯型電子機器20をクレードルに置くことで、通信が可能になる。
9. System Configuration Examples FIGS. 21A, 21B, and 22 show various system configuration examples of the present embodiment. In the system of FIG. 21A, the portable
そして通信経路が確立されると、携帯型電子機器20の記憶部60とホームサーバ120の記憶部160の間で、ユーザ履歴情報の同期処理(転送処理)が行われる。そしてロボット300は、ホームサーバ120の制御の下で動作する。即ちホームサーバ120の記憶部160に記憶されたユーザ履歴情報に基づいて制御されて動作する。図5(A)を例にとれば、ホームサーバ120の処理部140が、記憶部160のユーザ履歴情報を解析し、ユーザ履歴情報に対応した発話動作等を行うように、ロボット300に指示して制御する。
When the communication path is established, user history information synchronization processing (transfer processing) is performed between the
図21(A)のシステム構成によれば、ユーザが近づくと、ホームサーバ120の記憶部160に対してユーザ履歴情報が予めロードされるようになる。従って、ロボット300が起動した後に、ユーザ履歴情報に基づくロボット制御を直ぐに開始できるようになり、処理を効率化できる。またユーザ履歴情報のデータサイズが大きい場合に、ロボット300に履歴情報記憶部を設けなくても済むため、ロボット300の低コスト化やコンパクト化を図れる。
According to the system configuration of FIG. 21A, when a user approaches, user history information is loaded in advance into the
図21(B)のシステムでは、携帯型電子機器20と外部サーバ620はPHS等の無線WANで通信接続され、外部サーバ620とロボット300もPHS等の無線WANで通信接続される。携帯型電子機器20やロボット300などの各ユニットは、適宜、外部サーバ620と通信を行って、ユーザ履歴情報の同期処理を行う。例えばユニットが停止するタイミングで、そのユニットから外部サーバ620にユーザ履歴情報をアップロードし、ユニットが起動するタイミングで、外部サーバ620からそのユニットにユーザ履歴情報をダウンロードする。
In the system of FIG. 21B, the portable
なお図21(B)では、無線強度に基づくユーザと家の近接判断ができない。従って、この場合には、例えばPHSの基地局の位置登録情報などに基づいて、ユーザの位置を判断し、ユーザが家に近づいたか否かを判断すればよい。或いはウェアラブルセンサ12のGPSセンサに基づいて判断してもよい。そしてユーザが家に近づいたと判断された場合に、外部サーバ620等の制御により、ロボット300を起動すればよい。
In FIG. 21B, it is not possible to determine the proximity of the user and the house based on the wireless strength. Therefore, in this case, the user's position may be determined based on, for example, the position registration information of the PHS base station, and it may be determined whether or not the user has approached the house. Or you may judge based on the GPS sensor of the
図22のシステムでは、携帯型電子機器20と外部サーバ620はPHS等の無線WANで通信接続され、外部サーバ620とホームサーバ120はADSL等の有線WANで通信接続され、ホームサーバ120とロボット300は無線LAN等で通信接続される。そして各ユニットは、適宜、外部サーバ620と通信して、ユーザ履歴情報の同期処理を行う。また、PHSの位置登録情報、GPSセンサ、マイク等を利用して、ユーザが家に近づいたか否かを判断し、近づいた場合には、外部サーバ620の記憶部660のユーザ履歴情報を、ホームサーバ120の記憶部160にダウンロードする。
In the system of FIG. 22, the portable
なお、上記のように本実施形態について詳細に説明したが、本発明の新規事項および効果から実体的に逸脱しない多くの変形が可能であることは当業者には容易に理解できるであろう。従って、このような変形例はすべて本発明の範囲に含まれるものとする。例えば、明細書又は図面において、少なくとも一度、より広義または同義な異なる用語(第1、第2、第3のサブシステム、第1、第2、第3のセンサ、第1、第2、第3の制御対象機器等)と共に記載された用語(モバイルサブシステム、ホームサブシステム、車内サブシステム、ウェアラブルセンサ、ホームセンサ、車内センサ、モバイル制御対象機器、ホーム制御対象機器、車内制御対象機器等)は、明細書又は図面のいかなる箇所においても、その異なる用語に置き換えることができる。また携帯型電子機器やサブシステムやロボット等の構成、動作も本実施形態で説明したものに限定に限定されず、種々の変形実施が可能である。例えばセンサ選択部と制御対象機器選択部のいずれか一方を省略する変形実施も可能である。 Although the present embodiment has been described in detail as described above, it will be easily understood by those skilled in the art that many modifications can be made without departing from the novel matters and effects of the present invention. Accordingly, all such modifications are intended to be included in the scope of the present invention. For example, in the specification or drawings, at least once, a broader or synonymous different term (first, second, third subsystem, first, second, third sensor, first, second, third The term (mobile subsystem, home subsystem, in-vehicle subsystem, wearable sensor, home sensor, in-vehicle sensor, mobile control target device, home control target device, in-vehicle control target device, etc.) The different terms can be used anywhere in the specification or drawings. In addition, the configuration and operation of the portable electronic device, subsystem, robot, and the like are not limited to those described in this embodiment, and various modifications can be made. For example, a modified embodiment in which any one of the sensor selection unit and the control target device selection unit is omitted is possible.
10 センサ、12 ウェアラブルセンサ、14 ホームセンサ、16 車内センサ、
17 選択状態監視部、18 制御部、19 センサデバイス、
20 携帯型電子機器、30 情報取得部、32 通信部、34 センサI/F部、
40 処理部、42 センサ選択部、44 制御対象機器選択部、46 演算部、
48 履歴情報更新部、50 イベント判定部、52 制御処理部、60 記憶部、
62 履歴情報記憶部、64 出力情報記憶部、70 情報転送部、72 通信部、
74 機器I/F部、80 操作部、82 表示制御部、84 情報記憶媒体、
90 制御対象機器、92 モバイル制御対象機器、93 ウェアラブルディスプレイ、
94 ホーム制御対象機器、96 車内制御対象機器、97 選択状態監視部、
98 制御部、99 制御対象、120 ホームサーバ、140 処理部、
160 記憶部、200 ホームディスプレイ、286 表示制御部、290 表示部、
300 ロボット、310 ロボット搭載センサ 340 処理部、
386 ロボット制御部、390 ロボット動作機構、397 選択状態監視部、
400 カーナビ、440 処理部、486 表示制御部、490 表示部、
620 外部サーバ、640 処理部 660 記憶部
10 sensors, 12 wearable sensors, 14 home sensors, 16 in-vehicle sensors,
17 selection state monitoring unit, 18 control unit, 19 sensor device,
20 portable electronic devices, 30 information acquisition unit, 32 communication unit, 34 sensor I / F unit,
40 processing unit, 42 sensor selection unit, 44 control target device selection unit, 46 calculation unit,
48 history information update unit, 50 event determination unit, 52 control processing unit, 60 storage unit,
62 history information storage unit, 64 output information storage unit, 70 information transfer unit, 72 communication unit,
74 device I / F unit, 80 operation unit, 82 display control unit, 84 information storage medium,
90 control target device, 92 mobile control target device, 93 wearable display,
94 home control target equipment, 96 in-car control target equipment, 97 selection state monitoring unit,
98 control unit, 99 control target, 120 home server, 140 processing unit,
160 storage unit, 200 home display, 286 display control unit, 290 display unit,
300 robot, 310
386 robot control unit, 390 robot operation mechanism, 397 selection state monitoring unit,
400 car navigation system, 440 processing unit, 486 display control unit, 490 display unit,
620 External server, 640
Claims (26)
ユーザが存在する前記サブシステムのセンサからのセンサ情報を取得する情報取得手段と、
ユーザの行動、状態及び環境の少なくとも1つについてのユーザ履歴情報を記憶する履歴情報記憶手段と、
取得されたセンサ情報に基づいて、記憶されたユーザ履歴情報を更新する履歴情報更新手段と、
ユーザ履歴情報を用いた制御が行われる制御対象機器を、ユーザが存在する前記サブシステムの制御対象機器の中から選択する制御対象機器選択手段と、
第1のサブシステムのセンサからのセンサ情報によりユーザ履歴情報が更新されたユーザが、第2のサブシステムの制御対象機器である第2の制御対象機器の利用が可能な状態になったことを示す利用可能イベントの発生を判定するイベント判定手段と、
前記利用可能イベントが発生し、前記第2の制御対象機器が選択された場合に、ユーザ履歴情報を用いた前記第2の制御対象機器の制御動作を開始させる制御処理手段と、
を含み、
前記制御対象機器選択手段は、
前記利用可能イベントが発生した場合に、前記第2の制御対象機器を選択し、
前記制御処理手段は、
前記利用可能イベントが発生した場合に、携帯型電子機器の電源をオフにする、或いは携帯型電子機器を通常動作モードから低消費電力モードに移行させる制御を行うことを特徴とする携帯型電子機器。 A behavior sensor configured to measure a user's behavior existing in the space, at least one of a state sensor that measures a user's state and an environment sensor that measures a user's environment, and a control target device A portable electronic device used by an integrated system of a plurality of subsystems, in which a plurality of subsystems are integrated, possessed by a user moving between the plurality of subsystems;
Information acquisition means for acquiring sensor information from sensors of the subsystem in which the user exists;
History information storage means for storing user history information about at least one of the user's behavior, state and environment;
History information updating means for updating the stored user history information based on the acquired sensor information;
Control target device selecting means for selecting a control target device to be controlled using user history information from among the control target devices of the subsystem in which the user exists;
The user whose user history information has been updated by the sensor information from the sensor of the first subsystem is in a state where the second control target device that is the control target device of the second subsystem can be used. Event determining means for determining occurrence of an available event to be indicated;
Control processing means for starting a control operation of the second control target device using user history information when the available event occurs and the second control target device is selected;
Only including,
The control target device selection means includes
When the available event occurs, select the second control target device,
The control processing means includes
When the available event occurs, the portable electronic device is controlled to turn off the power of the portable electronic device or shift the portable electronic device from the normal operation mode to the low power consumption mode. .
前記複数のサブシステムの複数のセンサの中から、ユーザが利用中のサブシステムにおいて利用可能なセンサを選択するセンサ選択手段を含み、
前記情報取得手段は、
前記センサ選択手段により選択されたセンサからのセンサ情報を取得することを特徴とする携帯型電子機器。 In claim 1,
Sensor selection means for selecting a sensor available in the subsystem being used by the user from the plurality of sensors of the plurality of subsystems;
The information acquisition means includes
Sensor information from a sensor selected by the sensor selection means is acquired.
前記センサ選択手段は、
時間情報、ユーザの場所情報及びユーザの状況情報の少なくとも1つであるTPO情報に基づいて、前記複数のサブシステムの複数のセンサの中から、ユーザが利用中のサブシステムにおいて利用可能なセンサを選択することを特徴とする携帯型電子機器。 In claim 2,
The sensor selection means includes
Based on TPO information that is at least one of time information, user location information, and user status information, a sensor that can be used in the subsystem being used by the user is selected from the plurality of sensors in the plurality of subsystems. A portable electronic device characterized by being selected.
前記制御対象機器選択手段は、
時間情報、ユーザの場所情報及びユーザの状況情報の少なくとも1つであるTPO情報に基づいて、前記複数のサブシステムの複数の制御対象機器の中から、ユーザが利用中のサブシステムにおいて利用可能な制御対象機器を選択することを特徴とする携帯型電子機器。 In any one of Claims 1 thru | or 3,
The control target device selection means includes
Based on TPO information that is at least one of time information, user location information, and user status information, it can be used in a subsystem being used by a user from among a plurality of control target devices of the plurality of subsystems. A portable electronic device characterized by selecting a device to be controlled.
利用可能な制御対象機器がない場合には、ユーザ履歴情報を用いた制御対象機器の制御は行われずに、前記履歴情報更新手段によるユーザ履歴情報の更新だけが行われることを特徴とする携帯型電子機器。 In claim 1,
When there is no control target device that can be used, the control of the control target device using the user history information is not performed, and only the user history information is updated by the history information update unit. Electronics.
利用可能なセンサがない場合には、前記履歴情報更新手段によるユーザ履歴情報の更新は行われずに、ユーザ履歴情報を用いた制御対象機器の制御だけが行われることを特徴とする携帯型電子機器。 In any one of Claims 1 thru | or 5,
The portable electronic device is characterized in that when there is no usable sensor, the user history information is not updated by the history information updating means, and only the control target device is controlled using the user history information. .
携帯型電子機器の外部の制御対象の制御が可能な外部制御手段を含み、
前記外部制御手段は、
前記制御対象機器選択手段により制御対象機器が選択された場合に、選択された制御対象機器の制御対象を、ユーザ履歴情報を用いて制御することを特徴とする携帯型電子機器。 In any one of Claims 1 thru | or 6.
Including external control means capable of controlling an external control target of the portable electronic device,
The external control means includes
When a control target device is selected by the control target device selection unit, a control target of the selected control target device is controlled using user history information.
前記利用可能イベントが発生した場合に、前記第2のサブシステムのセンサから取得されたセンサ情報に基づいてユーザ履歴情報を更新する履歴情報更新手段を含むことを特徴とする携帯型電子機器。 In any one of Claims 1 thru | or 7 ,
A portable electronic device comprising history information update means for updating user history information based on sensor information acquired from a sensor of the second subsystem when the available event occurs.
前記制御処理手段は、
前記利用可能イベントが発生した場合に、前記第2の制御対象機器の電源をオンにする、或いは前記第2の制御対象機器を低消費電力モードから通常動作モードに復帰させる制御を行うことを特徴とする携帯型電子機器。 In any one of Claims 1 thru | or 8 .
The control processing means includes
When the available event occurs, the second control target device is turned on, or the second control target device is controlled to return from the low power consumption mode to the normal operation mode. A portable electronic device.
前記第2のサブシステムとの間で情報転送を行う情報転送手段を含み、
前記制御処理手段は、
前記利用可能イベントが発生した場合に、前記情報転送手段については電源をオフにしない、或いは通常動作モードに設定する制御を行うことを特徴とする携帯型電子機器。 In any one of Claims 1 thru | or 9 ,
Including information transfer means for transferring information to and from the second subsystem;
The control processing means includes
When the available event occurs, the information transfer means is controlled not to turn off the power or set to a normal operation mode.
前記制御処理手段は、
前記第2の制御対象機器をユーザが利用できなくなる利用不可イベントが発生した場合には、前記第2の制御対象機器の電源をオフにする、或いは前記第2の制御対象機器を通常動作モードから低消費電力モードに移行させる制御を行うことを特徴とする携帯型電子機器。 In any one of Claims 1 thru | or 10 .
The control processing means includes
When an unusable event occurs in which the user cannot use the second control target device, the second control target device is turned off, or the second control target device is moved from the normal operation mode. A portable electronic device characterized by performing control to shift to a low power consumption mode.
携帯型電子機器が前記第2のサブシステムの制御対象機器に装着された場合に、前記履歴情報記憶手段が携帯型電子機器と前記第2のサブシステムの前記第2の制御対象機器とで共用され、
共用された前記履歴情報記憶手段のユーザ履歴情報が、前記第2のサブシステムのセンサからのセンサ情報に基づき更新されることを特徴とする携帯型電子機器。 In any one of Claims 1 thru | or 11 ,
When the portable electronic device is mounted on the control target device of the second subsystem, the history information storage means is shared by the portable electronic device and the second control target device of the second subsystem. And
The portable electronic device, wherein user history information in the shared history information storage means is updated based on sensor information from a sensor of the second subsystem.
前記利用可能イベントが発生した場合に、前記履歴情報記憶手段に記憶されるユーザ履歴情報を、前記第2のサブシステムの第2の履歴情報記憶手段に転送する情報転送手段を含むことを特徴とする携帯型電子機器。 In any one of Claims 1 thru | or 11 ,
Characterized in that it includes information transfer means for transferring user history information stored in the history information storage means to second history information storage means of the second subsystem when the available event occurs. Portable electronic devices.
前記情報転送手段は、
前記履歴情報記憶手段に記憶されるユーザ履歴情報と前記第2のサブシステムの第2の履歴情報記憶手段に記憶されるユーザ履歴情報とを、同じ内容の情報に維持する情報同期処理を行うことを特徴とする携帯型電子機器。 In claim 13 ,
The information transfer means includes
Performing information synchronization processing for maintaining the user history information stored in the history information storage means and the user history information stored in the second history information storage means of the second subsystem in the same information. A portable electronic device characterized by
前記第2のサブシステムとの間で無線による情報転送を行う情報転送手段を含み、
前記イベント判定手段は、
前記無線の強度を検出することで、前記利用可能イベントの発生を判定することを特徴とする携帯型電子機器。 In any one of Claims 1 thru | or 14 .
Including information transfer means for wirelessly transferring information to and from the second subsystem,
The event determination means includes
A portable electronic device, wherein the occurrence of the available event is determined by detecting the wireless strength.
前記イベント判定手段は、
前記第2のサブシステムにて利用可能なクレードルに携帯型電子機器が接続された場合に、前記利用可能イベントが発生したと判定することを特徴とする携帯型電子機器。 In any one of Claims 1 thru | or 14 .
The event determination means includes
A portable electronic device, wherein when the portable electronic device is connected to a cradle that can be used in the second subsystem, it is determined that the available event has occurred.
前記履歴情報記憶手段に記憶されるユーザ履歴情報を、前記第2のサブシステムの第2の履歴情報記憶手段に転送する情報転送手段を含み、
前記イベント判定手段は、
前記第2のサブシステムの場所に対するユーザの接近状態を判定し、
前記情報転送手段は、
接近状態が、第1の接近状態から、前記第1の接近状態よりも接近度合いが高い第2の接近状態になった場合に、前記履歴情報記憶手段に記憶されるユーザ履歴情報を、前記第2のサブシステムの前記第2の履歴情報記憶手段に転送し、
前記制御処理手段は、
ユーザの接近状態が、前記第2の接近状態から、前記第2の接近状態よりも接近度合いが高い第3の接近状態になった場合に、ユーザ履歴情報を用いた前記第2の制御対象機器の制御動作を開始させることを特徴とする携帯型電子機器。 In any one of Claims 1 thru | or 16 .
Including information transfer means for transferring user history information stored in the history information storage means to second history information storage means of the second subsystem;
The event determination means includes
Determining a user's proximity to the location of the second subsystem;
The information transfer means includes
When the approaching state changes from the first approaching state to the second approaching state having a higher degree of approaching than the first approaching state, the user history information stored in the history information storage means is Transfer to the second history information storage means of the two subsystems,
The control processing means includes
When the user approach state changes from the second approach state to a third approach state having a higher degree of approach than the second approach state, the second control target device using user history information A portable electronic device characterized by starting a control operation.
前記情報転送手段は、
ユーザの接近状態が前記第2の接近状態である期間の間、前記履歴情報記憶手段に記憶されるユーザ履歴情報と前記第2のサブシステムの前記第2の履歴情報記憶手段に記憶されるユーザ履歴情報とを、同じ内容の情報に維持する情報同期処理を行うことを特徴とする携帯型電子機器。 In claim 17 ,
The information transfer means includes
The user history information stored in the history information storage means and the user stored in the second history information storage means of the second subsystem during a period when the user approach state is the second approach state A portable electronic device characterized by performing information synchronization processing for maintaining history information as information of the same content.
前記制御処理手段は、
ユーザの接近状態が、前記第2の接近状態から前記第1の接近状態になった場合に、ユーザ履歴情報を用いた前記第2の制御対象機器の制御動作を停止させることを特徴とする携帯型電子機器。 In claim 17 or 18 ,
The control processing means includes
When the user approaching state changes from the second approaching state to the first approaching state, the control operation of the second control target device using the user history information is stopped. Type electronic equipment.
前記イベント判定手段は、
前記第1、第2、第3の接近状態を、距離による受信状態が異なる少なくとも2種類の無線通信を利用して判断することを特徴とする携帯型電子機器。 In any of claims 17 to 19 ,
The event determination means includes
The portable electronic device, wherein the first, second, and third approach states are determined using at least two types of wireless communication in which reception states according to distances are different.
ユーザが存在する前記サブシステムのセンサの中から、ユーザが利用可能なセンサを選択するセンサ選択手段と、
前記センサ選択手段により選択されたセンサからのセンサ情報を取得する情報取得手段と、
ユーザの行動、状態及び環境の少なくとも1つについてのユーザ履歴情報を記憶する履歴情報記憶手段と、
取得されたセンサ情報に基づいて、記憶されたユーザ履歴情報を更新する履歴情報更新手段と、
第1のサブシステムのセンサからのセンサ情報によりユーザ履歴情報が更新されたユーザが、第2のサブシステムのセンサの利用が可能な状態になったことを示す利用可能イベントの発生を判定するイベント判定手段と、
前記利用可能イベントが発生した場合に、前記履歴情報記憶手段に記憶されるユーザ履歴情報を、前記第2のサブシステムの第2の履歴情報記憶手段に転送する情報転送手段と、
を含み、
前記センサ選択手段は、
時間情報、ユーザの場所情報及びユーザの状況情報の少なくとも1つであるTPO情報に基づいて、ユーザが存在する前記サブシステムのセンサの中から、ユーザが利用可能なセンサを選択することを特徴とする携帯型電子機器。 A behavior sensor configured to measure a user's behavior existing in the space, at least one of a state sensor that measures a user's state and an environment sensor that measures a user's environment, and a control target device A portable electronic device used by an integrated system in which a plurality of subsystems are integrated and possessed by a user moving between the plurality of subsystems;
A sensor selection means for selecting a sensor available to the user from the sensors of the subsystem in which the user exists;
Information acquisition means for acquiring sensor information from the sensor selected by the sensor selection means;
History information storage means for storing user history information about at least one of the user's behavior, state and environment;
History information updating means for updating the stored user history information based on the acquired sensor information ;
An event for determining the occurrence of an available event indicating that a user whose user history information has been updated with sensor information from the sensor of the first subsystem has entered a state where the sensor of the second subsystem can be used. A determination means;
Information transfer means for transferring user history information stored in the history information storage means to second history information storage means of the second subsystem when the available event occurs;
Only including,
The sensor selection means includes
A sensor that can be used by the user is selected from sensors of the subsystem in which the user exists based on TPO information that is at least one of time information, user location information, and user status information. Portable electronic devices.
前記センサ選択手段は、
前記利用可能イベントが発生した場合に、ユーザ履歴情報を更新するためのセンサとして、前記第2のサブシステムのセンサを選択することを特徴とする携帯型電子機器。 In claim 21 ,
Before Symbol sensor selection means,
A portable electronic device, wherein a sensor of the second subsystem is selected as a sensor for updating user history information when the available event occurs.
前記情報転送手段は、 The information transfer means includes
前記履歴情報記憶手段に記憶されるユーザ履歴情報と前記第2のサブシステムの第2の履歴情報記憶手段に記憶されるユーザ履歴情報とを、同じ内容の情報に維持する情報同期処理を行うことを特徴とする携帯型電子機器。 Performing information synchronization processing for maintaining the user history information stored in the history information storage means and the user history information stored in the second history information storage means of the second subsystem in the same information. A portable electronic device characterized by
ユーザが存在する前記サブシステムのセンサからのセンサ情報を取得する情報取得手段と、
ユーザの行動、状態及び環境の少なくとも1つについてのユーザ履歴情報を記憶する履歴情報記憶手段と、
取得されたセンサ情報に基づいて、記憶されたユーザ履歴情報を更新する履歴情報更手段と、
ユーザ履歴情報を用いた制御が行われる制御対象機器を、ユーザが存在する前記サブシステムの制御対象機器の中から選択する制御対象機器選択手段と、
第1のサブシステムのセンサからのセンサ情報によりユーザ履歴情報が更新されたユーザが、第2のサブシステムの制御対象機器である第2の制御対象機器の利用が可能な状態になったことを示す利用可能イベントの発生を判定するイベント判定手段と、
前記利用可能イベントが発生し、前記第2の制御対象機器が選択された場合に、ユーザ履歴情報を用いた前記第2の制御対象機器の制御動作を開始させる制御処理手段として、
コンピュータを機能させ、
前記制御対象機器選択手段は、
前記利用可能イベントが発生した場合に、前記第2の制御対象機器を選択し、
前記制御処理手段は、
前記利用可能イベントが発生した場合に、携帯型電子機器の電源をオフにする、或いは携帯型電子機器を通常動作モードから低消費電力モードに移行させる制御を行うことを特徴とするプログラム。 A behavior sensor configured to measure a user's behavior existing in the space, at least one of a state sensor that measures a user's state and an environment sensor that measures a user's environment, and a control target device A program for a portable electronic device used by an integrated system in which a plurality of subsystems are integrated and possessed by a user moving between the plurality of subsystems,
Information acquisition means for acquiring sensor information from sensors of the subsystem in which the user exists;
History information storage means for storing user history information about at least one of the user's behavior, state and environment;
History information updating means for updating the stored user history information based on the acquired sensor information;
Control target device selecting means for selecting a control target device to be controlled using user history information from among the control target devices of the subsystem in which the user exists;
The user whose user history information has been updated by the sensor information from the sensor of the first subsystem is in a state where the second control target device that is the control target device of the second subsystem can be used. Event determining means for determining occurrence of an available event to be indicated;
As the control processing means for starting the control operation of the second control target device using user history information when the available event occurs and the second control target device is selected,
Make the computer work ,
The control target device selection means includes
When the available event occurs, select the second control target device,
The control processing means includes
A program for performing a control to turn off the power of a portable electronic device or shift the portable electronic device from a normal operation mode to a low power consumption mode when the available event occurs .
ユーザが存在する前記サブシステムのセンサの中から、ユーザが利用可能なセンサを選択するセンサ選択手段と、
前記センサ選択手段により選択されたセンサからのセンサ情報を取得する情報取得手段と、
ユーザの行動、状態及び環境の少なくとも1つについてのユーザ履歴情報を記憶する履歴情報記憶手段と、
取得されたセンサ情報に基づいて、記憶されたユーザ履歴情報を更新する履歴情報更新手段と、
第1のサブシステムのセンサからのセンサ情報によりユーザ履歴情報が更新されたユーザが、第2のサブシステムのセンサの利用が可能な状態になったことを示す利用可能イベントの発生を判定するイベント判定手段と、
前記利用可能イベントが発生した場合に、前記履歴情報記憶手段に記憶されるユーザ履歴情報を、前記第2のサブシステムの第2の履歴情報記憶手段に転送する情報転送手段として、
コンピュータを機能させ、
前記センサ選択手段は、
時間情報、ユーザの場所情報及びユーザの状況情報の少なくとも1つであるTPO情報に基づいて、ユーザが存在する前記サブシステムのセンサの中から、ユーザが利用可能なセンサを選択することを特徴とするプログラム。 A behavior sensor configured to measure a user's behavior existing in the space, at least one of a state sensor that measures a user's state and an environment sensor that measures a user's environment, and a control target device A program for a portable electronic device used by an integrated system in which a plurality of subsystems are integrated and possessed by a user moving between the plurality of subsystems,
A sensor selection means for selecting a sensor available to the user from the sensors of the subsystem in which the user exists;
Information acquisition means for acquiring sensor information from the sensor selected by the sensor selection means;
History information storage means for storing user history information about at least one of the user's behavior, state and environment;
History information updating means for updating the stored user history information based on the acquired sensor information ;
An event for determining the occurrence of an available event indicating that a user whose user history information has been updated with sensor information from the sensor of the first subsystem has entered a state where the sensor of the second subsystem can be used. A determination means;
As information transfer means for transferring user history information stored in the history information storage means to second history information storage means of the second subsystem when the available event occurs,
Make the computer work,
The sensor selection means includes
A sensor that can be used by the user is selected from sensors of the subsystem in which the user exists based on TPO information that is at least one of time information, user location information, and user status information. Program to do.
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007159317A JP5265141B2 (en) | 2007-06-15 | 2007-06-15 | Portable electronic device, program and information storage medium |
| CN2008800203704A CN101681494B (en) | 2007-06-15 | 2008-06-13 | Mobile electronic device |
| PCT/JP2008/060859 WO2008153131A1 (en) | 2007-06-15 | 2008-06-13 | Mobile electronic device, program, and information storage medium |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2007159317A JP5265141B2 (en) | 2007-06-15 | 2007-06-15 | Portable electronic device, program and information storage medium |
Publications (3)
| Publication Number | Publication Date |
|---|---|
| JP2008312047A JP2008312047A (en) | 2008-12-25 |
| JP2008312047A5 JP2008312047A5 (en) | 2010-07-29 |
| JP5265141B2 true JP5265141B2 (en) | 2013-08-14 |
Family
ID=40129734
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2007159317A Active JP5265141B2 (en) | 2007-06-15 | 2007-06-15 | Portable electronic device, program and information storage medium |
Country Status (3)
| Country | Link |
|---|---|
| JP (1) | JP5265141B2 (en) |
| CN (1) | CN101681494B (en) |
| WO (1) | WO2008153131A1 (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2016158424A1 (en) * | 2015-03-30 | 2016-10-06 | 株式会社 イマック | Load measuring system |
Families Citing this family (28)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2011070596A (en) * | 2009-09-28 | 2011-04-07 | Fujitsu Ltd | Information collecting system |
| JP2011076454A (en) * | 2009-09-30 | 2011-04-14 | Nippon Telegr & Teleph Corp <Ntt> | System, method and program for grouping information |
| JP5454212B2 (en) * | 2010-02-22 | 2014-03-26 | トヨタ自動車株式会社 | Information control system and information control method |
| US10572721B2 (en) | 2010-08-09 | 2020-02-25 | Nike, Inc. | Monitoring fitness using a mobile device |
| CN103154954B (en) * | 2010-08-09 | 2018-06-05 | 耐克创新有限合伙公司 | For recording the system and method with tracing movement activity |
| US9049663B2 (en) | 2010-12-10 | 2015-06-02 | Qualcomm Incorporated | Processing involving multiple sensors |
| CN102523401B (en) * | 2011-12-29 | 2015-09-30 | 深圳Tcl新技术有限公司 | Smart Home TV set control system and method |
| US9794736B2 (en) * | 2012-12-21 | 2017-10-17 | Qualcomm Incorporated | Low power always-on determination of indoor versus outdoor state |
| KR102031897B1 (en) * | 2013-04-05 | 2019-10-14 | 에스케이텔레콤 주식회사 | Method for managing resource service based on context aware, apparatus and terminal thereof |
| JP6107944B2 (en) * | 2013-05-14 | 2017-04-05 | 富士通株式会社 | Portable information processing apparatus, information processing system, and information processing method |
| KR20160014625A (en) * | 2013-05-28 | 2016-02-11 | 톰슨 라이센싱 | Method and system for identifying location associated with voice command to control home appliance |
| CN106233093B (en) * | 2014-02-07 | 2018-06-29 | 三菱电机株式会社 | Function candidate's suggestion device |
| WO2015194215A1 (en) * | 2014-06-20 | 2015-12-23 | ソニー株式会社 | Information processing device, information processing method, and program |
| JP6467943B2 (en) | 2015-01-27 | 2019-02-13 | 日本精機株式会社 | Plant equipment status collection system |
| JP5975135B1 (en) * | 2015-03-31 | 2016-08-23 | ダイキン工業株式会社 | Control system |
| JP6602551B2 (en) * | 2015-04-02 | 2019-11-06 | 株式会社東芝 | Risk determination device and risk determination method |
| CN104879886B (en) * | 2015-04-30 | 2018-10-02 | 广东美的制冷设备有限公司 | Control method, device and the terminal of household appliance |
| JP6255368B2 (en) * | 2015-06-17 | 2017-12-27 | Cocoro Sb株式会社 | Emotion control system, system and program |
| JP2017012277A (en) * | 2015-06-29 | 2017-01-19 | カシオ計算機株式会社 | Portable electronic device, sensor control system, sensor control method, and sensor control program |
| JP6265174B2 (en) * | 2015-06-29 | 2018-01-24 | カシオ計算機株式会社 | Portable electronic device, display control system, display control method, and display control program |
| CN104917902A (en) * | 2015-06-30 | 2015-09-16 | 苏州寅初信息科技有限公司 | Method and system for controlling music playing status of terminal |
| CN105117007B (en) * | 2015-08-20 | 2019-02-12 | 小米科技有限责任公司 | Show control method, device and the intelligent pad of equipment |
| JP6642515B2 (en) * | 2016-07-04 | 2020-02-05 | カシオ計算機株式会社 | Electronic device, selection control system, selection method, and program |
| CN107065588A (en) * | 2017-06-03 | 2017-08-18 | 合肥佳洋电子科技有限公司 | A kind of intelligent domestic system |
| CN109087705A (en) * | 2017-06-14 | 2018-12-25 | Gms股份有限公司 | Generate the electronic equipment and its control method of growth and development information |
| JP7227854B2 (en) * | 2019-06-03 | 2023-02-22 | トヨタホーム株式会社 | Outing plan proposal system |
| JP2021018550A (en) * | 2019-07-19 | 2021-02-15 | 株式会社Lixil | Support device, information acquisition system and support program |
| EP3889933A1 (en) * | 2020-03-30 | 2021-10-06 | Signify Holding B.V. | A system for monitoring a space by a portable sensor device and a method thereof |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP4367736B2 (en) * | 2000-01-07 | 2009-11-18 | クラリオン株式会社 | Hands-free in-vehicle telephone device, control method therefor, and mobile communication system |
| JP2002027571A (en) * | 2000-07-05 | 2002-01-25 | Toshiba Corp | Communication terminal and radio terminal which are used in electric apparatus control system |
| JP3744375B2 (en) * | 2001-04-03 | 2006-02-08 | オムロン株式会社 | Cradle, security system, mobile phone, and monitoring method |
| JP2003111157A (en) * | 2001-09-28 | 2003-04-11 | Toshiba Corp | Integrated controller, apparatus controlling method, and apparatus controlling program |
| EP1316933B1 (en) * | 2001-11-28 | 2006-08-09 | Matsushita Electric Industrial Co., Ltd. | Home security system |
| JP4122779B2 (en) * | 2002-01-23 | 2008-07-23 | 三菱電機株式会社 | Home appliance control system, home appliance control device, and home appliance |
| JP3975400B2 (en) * | 2003-08-20 | 2007-09-12 | ソニー株式会社 | Monitoring system, information processing apparatus and method, recording medium, and program |
| JP2005084828A (en) * | 2003-09-05 | 2005-03-31 | Ntt Docomo Inc | User support system and method, and user support control system |
| JP4838499B2 (en) * | 2004-05-21 | 2011-12-14 | オリンパス株式会社 | User support device |
| JP4768242B2 (en) * | 2004-07-29 | 2011-09-07 | 日本電気株式会社 | Power saving device, portable terminal, and power saving method |
| JP4741500B2 (en) * | 2004-09-14 | 2011-08-03 | パナソニック株式会社 | EQUIPMENT CONTROL DEVICE, DEVICE, DEVICE CONTROL DEVICE CONTROL METHOD, PROGRAM, AND DEVICE CONTROL SYSTEM |
| US20080091284A1 (en) * | 2005-01-13 | 2008-04-17 | Keiji Sugiyama | Device Operation Control Device and Method Thereof |
| JP4759304B2 (en) * | 2005-04-07 | 2011-08-31 | オリンパス株式会社 | Information display system |
| JP5020494B2 (en) * | 2005-10-12 | 2012-09-05 | キヤノン株式会社 | Wireless communication apparatus and control method thereof |
| JP4902174B2 (en) * | 2005-11-04 | 2012-03-21 | 日本電信電話株式会社 | Ubiquitous service system and ubiquitous service providing method |
-
2007
- 2007-06-15 JP JP2007159317A patent/JP5265141B2/en active Active
-
2008
- 2008-06-13 CN CN2008800203704A patent/CN101681494B/en active Active
- 2008-06-13 WO PCT/JP2008/060859 patent/WO2008153131A1/en active Application Filing
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2016158424A1 (en) * | 2015-03-30 | 2016-10-06 | 株式会社 イマック | Load measuring system |
Also Published As
| Publication number | Publication date |
|---|---|
| CN101681494B (en) | 2012-08-08 |
| WO2008153131A1 (en) | 2008-12-18 |
| CN101681494A (en) | 2010-03-24 |
| JP2008312047A (en) | 2008-12-25 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP5265141B2 (en) | Portable electronic device, program and information storage medium | |
| JP2008310680A (en) | Control system, program, and information storage medium | |
| JP5060978B2 (en) | Information presentation system, program, information storage medium, and information presentation system control method | |
| JP6577642B2 (en) | Computer-based method and system for providing active and automatic personal assistance using automobiles or portable electronic devices | |
| US20110118870A1 (en) | Robot control system, robot, program, and information storage medium | |
| US20170032787A1 (en) | Smart necklace with stereo vision and onboard processing | |
| US8229877B2 (en) | Information processing system, information processing method, and computer program product | |
| CN101795831B (en) | Robot control system, robot, program, and information recording medium | |
| JP2009131928A (en) | Robot control system, robot, program and information recording medium | |
| CN105849675A (en) | Displaying relevant use interface objects | |
| JP6803299B2 (en) | System and method | |
| CN105015551A (en) | Driver state monitoring system, method for control the same, and vehicle | |
| US20120133514A1 (en) | Pause adviser system and use thereof | |
| CN110996796B (en) | Information processing apparatus, method, and program | |
| JPWO2019087484A1 (en) | Information processing equipment, information processing methods, and programs | |
| KR20170028247A (en) | Sleep managing method | |
| WO2016181670A1 (en) | Information processing device, information processing method, and program | |
| JP2020089947A (en) | Information processing device, information processing method, and program | |
| US20220016757A1 (en) | Information processing device, information processing method, and program | |
| CN114543313B (en) | Air conditioner control method, server, air conditioner and user terminal | |
| US10102769B2 (en) | Device, system and method for providing feedback to a user relating to a behavior of the user | |
| US20180315393A1 (en) | Display Device and Method for Controlling a Display Device | |
| JP7048709B2 (en) | System and method | |
| US11938625B2 (en) | Information processing apparatus, information processing method, and program | |
| JP2008009505A (en) | Information display system |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20100615 |
|
| A621 | Written request for application examination |
Free format text: JAPANESE INTERMEDIATE CODE: A621 Effective date: 20100615 |
|
| A131 | Notification of reasons for refusal |
Free format text: JAPANESE INTERMEDIATE CODE: A131 Effective date: 20130108 |
|
| A521 | Request for written amendment filed |
Free format text: JAPANESE INTERMEDIATE CODE: A523 Effective date: 20130308 |
|
| TRDD | Decision of grant or rejection written | ||
| A01 | Written decision to grant a patent or to grant a registration (utility model) |
Free format text: JAPANESE INTERMEDIATE CODE: A01 Effective date: 20130402 |
|
| A61 | First payment of annual fees (during grant procedure) |
Free format text: JAPANESE INTERMEDIATE CODE: A61 Effective date: 20130501 |
|
| R151 | Written notification of patent or utility model registration |
Ref document number: 5265141 Country of ref document: JP Free format text: JAPANESE INTERMEDIATE CODE: R151 |
|
| S531 | Written request for registration of change of domicile |
Free format text: JAPANESE INTERMEDIATE CODE: R313531 |
|
| R350 | Written notification of registration of transfer |
Free format text: JAPANESE INTERMEDIATE CODE: R350 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |
|
| R250 | Receipt of annual fees |
Free format text: JAPANESE INTERMEDIATE CODE: R250 |