JP2017142579A - On-vehicle device, computer program and caution information provision method - Google Patents
On-vehicle device, computer program and caution information provision method Download PDFInfo
- Publication number
- JP2017142579A JP2017142579A JP2016022088A JP2016022088A JP2017142579A JP 2017142579 A JP2017142579 A JP 2017142579A JP 2016022088 A JP2016022088 A JP 2016022088A JP 2016022088 A JP2016022088 A JP 2016022088A JP 2017142579 A JP2017142579 A JP 2017142579A
- Authority
- JP
- Japan
- Prior art keywords
- vehicle
- information
- caution
- road
- event
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Pending
Links
Images






Abstract
Description
本発明は、車両に搭載される車載装置、該車載装置を実現するためのコンピュータプログラム及び前記車載装置による注意情報提供方法に関する。 The present invention relates to an in-vehicle device mounted on a vehicle, a computer program for realizing the in-vehicle device, and a method for providing caution information by the in-vehicle device.
道路上に事故車両、故障車両、落下した荷物、崩れた土砂等の障害物が発生した場合、当該障害物をいち早く検出して、後続の車両へ通知し、又は誘導する技術が開発されている。例えば、複数の車両の軌跡情報を受信し、受信した軌跡情報に基づいて車両の車線変更を検出し、所定の区域を通過した車両の台数に対する車線変更を行った車両の台数の割合が所定の閾値以上となる場合に、その区域に障害物が存在することを検出する装置が開示されている(特許文献1参照)。 When an obstacle such as an accident vehicle, a broken vehicle, a fallen baggage, crumbled earth and sand, etc. occurs on the road, a technology has been developed to quickly detect the obstacle and notify or guide the following vehicle. . For example, it receives trajectory information of a plurality of vehicles, detects a lane change of the vehicle based on the received trajectory information, and the ratio of the number of vehicles that have changed the lane to the number of vehicles that have passed through a predetermined area is a predetermined amount. An apparatus for detecting the presence of an obstacle in the area when the threshold is exceeded is disclosed (see Patent Document 1).
特許文献1の装置は、障害物の存在を精度よく検出することができるものの、プローブ車両と路上装置との間で通信を行い、プローブ車両の位置情報を含む軌跡情報を路上装置で取得する必要がある。このため、路上装置などのインフラ設備が設置されていないような道路でも障害物の存在を検出することが望まれる。一方で、路上に放置された障害物だけでなく、狭い道路等では、対向車両が接近する場合に衝突事故が発生するおそれがあり、このような事故を未然に防ぐことが望まれる。
Although the device of
本発明は、斯かる事情に鑑みてなされたものであり、衝突事故を未然に防ぐべく注意情報を提供することができる車載装置、該車載装置を実現するためのコンピュータプログラム及び前記車載装置による注意情報提供方法を提供することを目的とする。 The present invention has been made in view of such circumstances, and an in-vehicle device capable of providing caution information to prevent a collision accident, a computer program for realizing the in-vehicle device, and a caution by the in-vehicle device An object is to provide an information providing method.
本発明の実施の形態に係る車載装置は、車両に搭載される車載装置であって、自車両の位置を取得する位置取得部と、道路の通行に係る注意事象の有無を判定する判定部と、該判定部で注意事象があると判定した場合、前記位置取得部で取得した位置に基づいて、前記注意事象が存在する旨及び該注意事象の位置を含む注意情報を生成する生成部と、該生成部で生成した注意情報を後方車両へ送信する送信部とを備える。 An in-vehicle device according to an embodiment of the present invention is an in-vehicle device mounted on a vehicle, a position acquisition unit that acquires the position of the host vehicle, and a determination unit that determines the presence or absence of an attention event related to traffic on a road, When the determination unit determines that there is a caution event, based on the position acquired by the position acquisition unit, a generation unit that generates the caution information including the presence of the caution event and the position of the caution event; A transmission unit that transmits the attention information generated by the generation unit to the rear vehicle.
本発明の実施の形態に係るコンピュータプログラムは、コンピュータに、注意情報を提供させるためのコンピュータプログラムであって、コンピュータを、自車両の位置を取得する位置取得部と、道路の通行に係る注意事象の有無を判定する判定部と、前記注意事象があると判定した場合、取得した自車両の位置に基づいて、前記注意事象が存在する旨及び該注意事象の位置を含む注意情報を生成する生成部と、生成した注意情報を後方車両へ出力する出力部として機能させる。 A computer program according to an embodiment of the present invention is a computer program for causing a computer to provide attention information. The computer includes a position acquisition unit that acquires the position of the host vehicle, and an attention event related to traffic on the road. A determination unit that determines whether or not there is an attention event, and generation that generates attention information including the presence of the attention event and the position of the attention event based on the acquired position of the own vehicle when it is determined that there is the attention event And the output unit that outputs the generated attention information to the rear vehicle.
本発明の実施の形態に係る注意情報提供方法は、車両に搭載される車載装置による注意情報提供方法であって、自車両の位置を位置取得部が取得し、道路の通行に係る注意事象の有無を判定部が判定し、前記注意事象があると判定された場合、取得された自車両の位置に基づいて、前記注意事象が存在する旨及び該注意事象の位置を含む注意情報を生成部が生成し、生成された注意情報を後方車両へ送信部が送信する。 A method for providing attention information according to an embodiment of the present invention is a method for providing attention information by an in-vehicle device mounted on a vehicle, wherein the position acquisition unit acquires the position of the host vehicle, and When the presence / absence is determined by the determination unit and it is determined that there is the attention event, the generation unit generates the attention information including the presence of the attention event and the position of the attention event based on the acquired position of the own vehicle Is generated, and the transmitter transmits the generated attention information to the rear vehicle.
本発明によれば、注意情報を提供して衝突事故を未然に防止することができる。 According to the present invention, it is possible to prevent a collision accident by providing caution information.
[本願発明の実施形態の説明]
本発明の実施の形態に係る車載装置は、車両に搭載される車載装置であって、自車両の位置を取得する位置取得部と、道路の通行に係る注意事象の有無を判定する判定部と、該判定部で注意事象があると判定した場合、前記位置取得部で取得した位置に基づいて、前記注意事象が存在する旨及び該注意事象の位置を含む注意情報を生成する生成部と、該生成部で生成した注意情報を後方車両へ送信する送信部とを備える。
[Description of Embodiment of Present Invention]
An in-vehicle device according to an embodiment of the present invention is an in-vehicle device mounted on a vehicle, a position acquisition unit that acquires the position of the host vehicle, and a determination unit that determines the presence or absence of an attention event related to traffic on a road, When the determination unit determines that there is a caution event, based on the position acquired by the position acquisition unit, a generation unit that generates the caution information including the presence of the caution event and the position of the caution event; A transmission unit that transmits the attention information generated by the generation unit to the rear vehicle.
本発明の実施の形態に係るコンピュータプログラムは、コンピュータに、注意情報を提供させるためのコンピュータプログラムであって、コンピュータを、自車両の位置を取得する位置取得部と、道路の通行に係る注意事象の有無を判定する判定部と、前記注意事象があると判定した場合、取得した自車両の位置に基づいて、前記注意事象が存在する旨及び該注意事象の位置を含む注意情報を生成する生成部と、生成した注意情報を後方車両へ出力する出力部として機能させる。 A computer program according to an embodiment of the present invention is a computer program for causing a computer to provide attention information. The computer includes a position acquisition unit that acquires the position of the host vehicle, and an attention event related to traffic on the road. A determination unit that determines whether or not there is an attention event, and generation that generates attention information including the presence of the attention event and the position of the attention event based on the acquired position of the own vehicle when it is determined that there is the attention event And the output unit that outputs the generated attention information to the rear vehicle.
本発明の実施の形態に係る注意情報提供方法は、車両に搭載される車載装置による注意情報提供方法であって、自車両の位置を位置取得部が取得し、道路の通行に係る注意事象の有無を判定部が判定し、前記注意事象があると判定された場合、取得された自車両の位置に基づいて、前記注意事象が存在する旨及び該注意事象の位置を含む注意情報を生成部が生成し、生成された注意情報を後方車両へ送信部が送信する。 A method for providing attention information according to an embodiment of the present invention is a method for providing attention information by an in-vehicle device mounted on a vehicle, wherein the position acquisition unit acquires the position of the host vehicle, and When the presence / absence is determined by the determination unit and it is determined that there is the attention event, the generation unit generates the attention information including the presence of the attention event and the position of the attention event based on the acquired position of the own vehicle Is generated, and the transmitter transmits the generated attention information to the rear vehicle.
位置取得部は、自車両の位置を取得する。自車両の位置を取得するには、例えば、GPS(Global Positioning System)、自律航法、又はGPSと自律航法との組合せなどを用いることができる。 The position acquisition unit acquires the position of the host vehicle. In order to acquire the position of the own vehicle, for example, GPS (Global Positioning System), autonomous navigation, or a combination of GPS and autonomous navigation can be used.
判定部は、道路の通行に係る注意事象の有無を判定する。通行に係る注意事象とは、道路を通行する際に運転者が注意しなければならない事象であり、例えば、対向車両、二輪車又は歩行者とすれ違うことが困難な場合、工事などで道路を通過することが困難な場合を含む。 The determination unit determines whether or not there is an attention event related to traffic on the road. A traffic caution event is an event that the driver must be careful about when traveling on the road. For example, if it is difficult to pass an oncoming vehicle, two-wheeled vehicle, or pedestrian, the vehicle will pass through the road during construction. Including cases where it is difficult.
生成部は、判定部で注意事象があると判定した場合、位置取得部で取得した位置に基づいて、当該注意事象が存在する旨及び当該注意事象の位置を含む注意情報を生成する。注意事象の位置は、注意事象が存在すると判定した場合の自車両の位置でもよく、注意事象の存在位置でもよく、自車両の位置を含む所要の区間でもよい。 When the determination unit determines that there is a caution event, the generation unit generates caution information including the presence of the caution event and the position of the caution event based on the position acquired by the position acquisition unit. The position of the attention event may be the position of the host vehicle when it is determined that the attention event exists, may be the position of the attention event, or may be a required section including the position of the host vehicle.
送信部は、生成部で生成した注意情報を後方車両へ送信する。後方車両は、例えば、自車両の後方から自車両の方へ走行する車両である。これにより、後方車両の運転者は、走行先のどの当たりに注意事象が存在するかを事前に知ることができ、注意が喚起されるので、衝突事故など発生を未然に防止することができる。 The transmission unit transmits the attention information generated by the generation unit to the rear vehicle. The rear vehicle is, for example, a vehicle that travels from the rear of the host vehicle toward the host vehicle. As a result, the driver of the rear vehicle can know in advance where the caution event exists and is alerted, so that it is possible to prevent the occurrence of a collision accident in advance.
本発明の実施の形態に係る車載装置は、自車両の変速機の変速位置を取得する変速位置取得部を備え、前記判定部は、変速位置が前進位置から後退位置になった場合、注意事象があると判定する。 An in-vehicle device according to an embodiment of the present invention includes a shift position acquisition unit that acquires a shift position of a transmission of the host vehicle, and the determination unit is configured to perform a caution event when the shift position changes from a forward position to a reverse position. Judge that there is.
変速位置取得部は、自車両の変速機の変速位置を取得する。判定部は、変速位置が前進位置から後退位置になった場合、注意事象があると判定する。走行していた自車両が、後退するのは、例えば、狭い道路で対向車両が存在するため、対向車両とすれ違いができる地点まで一旦自車両を後退させる場合と考えることができる。そこで、変速位置が前進位置から後退位置になった場合には、すれ違いが困難となるような注意事象が存在すると判定することができる。これにより、自車両の挙動により、注意事象の有無を判定することができる。一方、交差点の道幅が狭く、一度切り返さないと曲がりきれないような箇所、駐車場内等も検知されてしまうため、これは後述の判定部で再度事象を判定する。 The shift position acquisition unit acquires the shift position of the transmission of the host vehicle. The determination unit determines that there is a caution event when the shift position changes from the forward position to the reverse position. It can be considered that the host vehicle that has traveled retreats, for example, because there is an oncoming vehicle on a narrow road, so that the host vehicle is once moved back to a point where it can pass the oncoming vehicle. Therefore, when the shift position changes from the forward position to the reverse position, it can be determined that there is an attention event that makes it difficult to pass. Thereby, the presence or absence of a caution event can be determined from the behavior of the host vehicle. On the other hand, since the road width of the intersection is narrow and a part that cannot be bent without turning back once, the inside of the parking lot, and the like are also detected, the event is again determined by the determination unit described later.
本発明の実施の形態に係る車載装置は、自車両の車速を取得する車速取得部を備え、前記判定部は、所定時間の間に、自車両の車速が所定速度以上の速度から所定の下限値以下の速度になった場合、注意事象があると判定する。 An in-vehicle device according to an embodiment of the present invention includes a vehicle speed acquisition unit that acquires a vehicle speed of the host vehicle, and the determination unit determines whether the vehicle speed of the host vehicle is equal to or higher than a predetermined speed for a predetermined time. When the speed is lower than the value, it is determined that there is an attention event.
車速取得部は、自車両の車速を取得する。判定部は、所定時間の間に、自車両の車速が所定速度以上の速度から所定の下限値以下の速度になった場合、注意事象があると判定する。所定時間は、例えば、1秒〜5秒程度の時間とすることができる。所定速度は、例えば、自車両が走行している道路の制限速度とすることができる。また、下限値は、例えば、10km/hとすることができる。 The vehicle speed acquisition unit acquires the vehicle speed of the host vehicle. The determination unit determines that there is a caution event when the vehicle speed of the host vehicle changes from a speed equal to or higher than a predetermined speed to a speed equal to or lower than a predetermined lower limit value during a predetermined time. The predetermined time can be, for example, a time of about 1 second to 5 seconds. The predetermined speed can be, for example, a speed limit of a road on which the host vehicle is traveling. Moreover, a lower limit can be 10 km / h, for example.
所定速度以上で走行していた自車両の運転者が、例えば、前方から対向車両の接近を視認すると、ブレーキ操作を行って自車両を減速させる。さらに対向車両が接近し、対向車両とのすれ違いが困難であると判断すると、さらに減速することが考えられる。そこで、自車両の車速が所定速度以上の速度から所定の下限値以下の速度になった場合には、すれ違いが困難となるような注意事象が存在すると判定することができる。これにより、自車両の挙動により、注意事象の有無を判定することができる。 For example, when the driver of the host vehicle traveling at a predetermined speed or more visually recognizes the approach of the oncoming vehicle from the front, the driver operates the brake to decelerate the host vehicle. Further, if it is determined that the oncoming vehicle approaches and it is difficult to pass the oncoming vehicle, the vehicle may further decelerate. Therefore, when the vehicle speed of the host vehicle changes from a speed equal to or higher than a predetermined speed to a speed equal to or lower than a predetermined lower limit value, it can be determined that there is an attention event that makes it difficult to pass. Thereby, the presence or absence of a caution event can be determined from the behavior of the host vehicle.
本発明の実施の形態に係る車載装置は、自車両の周辺情報を取得する外部センサを備え、前記判定部は、前記外部センサで取得した周辺情報に基づいて、注意事象があると判定する。 The in-vehicle device according to the embodiment of the present invention includes an external sensor that acquires the peripheral information of the host vehicle, and the determination unit determines that there is a caution event based on the peripheral information acquired by the external sensor.
自車両の周辺情報を取得する外部センサを備える。外部センサは、例えば、車載カメラ、ライダー(LIDAR:Laser Imaging Detection and Ranging)などを用いることができる。 An external sensor that acquires the surrounding information of the host vehicle is provided. As the external sensor, for example, a vehicle-mounted camera, a rider (LIDAR: Laser Imaging Detection and Ranging), or the like can be used.
判定部は、外部センサで取得した周辺情報に基づいて、注意事象があると判定する。例えば、車載カメラで自車両の前方を撮像して得られた画像を解析し、あるいはライダーで得られたデータを解析することにより、対向車両の存在だけでなく対向車両が大型であるか否かも判定することができる。また、道路の幅、対向車両の車幅などを特定することにより、すれ違いが困難となるような注意事象の存在の有無をさらに精度よく判定することができる。 The determination unit determines that there is a caution event based on the peripheral information acquired by the external sensor. For example, by analyzing the image obtained by imaging the front of the host vehicle with the in-vehicle camera, or analyzing the data obtained by the rider, whether the oncoming vehicle is large as well as the presence of the oncoming vehicle Can be determined. Further, by specifying the width of the road, the width of the oncoming vehicle, and the like, it is possible to more accurately determine the presence or absence of an attention event that makes it difficult to pass.
本発明の実施の形態に係る車載装置は、道路情報を取得する道路情報取得部と、該道路情報取得部で取得した道路情報に基づいて、自車両が走行する道路が特定道路であるか否かを判定する道路判定部とを備え、前記判定部は、自車両が走行する道路が特定道路である場合、注意事象があると判定する。 The in-vehicle device according to the embodiment of the present invention includes a road information acquisition unit that acquires road information, and whether the road on which the host vehicle is traveling is a specific road based on the road information acquired by the road information acquisition unit. A road determination unit for determining whether or not the road on which the vehicle travels is a specific road, and determines that there is a caution event.
道路情報取得部は、道路情報を取得する。道路情報は、例えば、地図情報などから取得することができる。道路判定部は、道路情報取得部で取得した道路情報に基づいて、自車両が走行する道路が特定道路であるか否かを判定する。特定道路は、例えば、市街地の道路を除いた、山間部の道路又は農村部の道路等であり、所要の距離に亘って信号がない道路、カーブが多い道路、道路幅が狭い道路などを含めることができる。 The road information acquisition unit acquires road information. The road information can be acquired from, for example, map information. The road determination unit determines whether the road on which the host vehicle is traveling is a specific road based on the road information acquired by the road information acquisition unit. Specific roads are mountain roads or rural roads, excluding urban roads, including roads with no signal, roads with many curves, roads with narrow roads, etc. over the required distance. be able to.
判定部は、自車両が走行する道路が特定道路である場合、注意事象があると判定する。自車両が特定道路を走行する場合には、注意事象に遭遇する機会が一層多くなると考えることができる。そこで、自車両が走行する道路が特定道路であるか否かを判定することにより、すれ違いが困難となるような注意事象が存在するか否かをさらに精度よくと判定することができる。 The determination unit determines that there is a caution event when the road on which the host vehicle is traveling is a specific road. When the host vehicle travels on a specific road, it can be considered that there are more opportunities to encounter a caution event. Therefore, by determining whether or not the road on which the host vehicle is traveling is a specific road, it can be determined with higher accuracy whether or not there is a caution event that makes it difficult to pass.
本発明の実施の形態に係る車載装置は、後方車両との間で車車間通信が可能であるか否かを判定する車車間通信判定部を備え、前記送信部は、前記車車間通信判定部で車車間通信が可能であると判定した後方車両へ前記注意情報を送信する。 An in-vehicle device according to an embodiment of the present invention includes a vehicle-to-vehicle communication determination unit that determines whether vehicle-to-vehicle communication is possible with a rear vehicle, and the transmission unit includes the vehicle-to-vehicle communication determination unit. The caution information is transmitted to the rear vehicle determined that the inter-vehicle communication is possible.
車車間通信判定部は、後方車両との間で車車間通信が可能であるか否かを判定する。車車間通信は、車両(車載装置)同士の直接通信を実現するものであり、例えば、ITS(Intelligent Transport Systems)の所定の周波数帯を使用することができる。車車間通信により車両の走行状況(位置、速度、進行方向など)をリアルタイムで取得することができる。車車間通信が可能とは、単に通信が可能というだけではなく、所定のセキュリティが確保されていることも含む。 A vehicle-to-vehicle communication determination unit determines whether vehicle-to-vehicle communication is possible with a rear vehicle. The inter-vehicle communication realizes direct communication between vehicles (on-vehicle devices), and for example, a predetermined frequency band of ITS (Intelligent Transport Systems) can be used. It is possible to acquire the vehicle running status (position, speed, traveling direction, etc.) in real time by inter-vehicle communication. “Vehicle-to-vehicle communication is possible” not only means that communication is possible, but also includes that certain security is ensured.
送信部は、車車間通信判定部で車車間通信が可能であると判定した後方車両へ注意情報を送信する。これにより、車車間通信が可能な後方車両のみへ注意情報を送信することができ、注意情報を送信する送信先を限定することができ、不要な情報が送出されることを防止することができる。 The transmission unit transmits the caution information to the rear vehicle that has been determined by the vehicle-to-vehicle communication determination unit to be able to perform vehicle-to-vehicle communication. As a result, the caution information can be transmitted only to the rear vehicle capable of inter-vehicle communication, the transmission destination for transmitting the caution information can be limited, and unnecessary information can be prevented from being transmitted. .
本発明の実施の形態に係る車載装置は、自車両の進行方向を取得する自車両進行方向取得部と、後方車両の進行方向を取得する後方車両進行方向取得部と、自車両の進行方向と前記後方車両の進行方向とが所定の範囲内にあるか否かを判定する進行方向判定部とを備え、前記送信部は、前記進行方向判定部で所定の範囲内にあると判定した後方車両へ前記注意情報を送信する。 An in-vehicle device according to an embodiment of the present invention includes a host vehicle traveling direction acquisition unit that acquires a traveling direction of the host vehicle, a rear vehicle traveling direction acquisition unit that acquires a traveling direction of a rear vehicle, and a traveling direction of the host vehicle. A traveling direction determination unit that determines whether or not the traveling direction of the rear vehicle is within a predetermined range, and the transmission unit is determined to be within the predetermined range by the traveling direction determination unit The notice information is transmitted to
自車両進行方向取得部は、自車両の進行方向を取得する。自車両の位置及び当該位置での時刻を繰り返し取得することにより、進行方向を取得することができる。後方車両進行方向取得部は、例えば、車車間通信を用いて、後方車両の進行方向を取得する。 The own vehicle traveling direction acquisition unit acquires the traveling direction of the own vehicle. By repeatedly acquiring the position of the host vehicle and the time at the position, the traveling direction can be acquired. A back vehicle advancing direction acquisition part acquires the advancing direction of a back vehicle using vehicle-to-vehicle communication, for example.
進行方向判定部は、自車両の進行方向と後方車両の進行方向とが所定の範囲内にあるか否かを判定する。所定の範囲内とは、後方車両が自車両に近づく方向へ走行しているのか、あるいは自車両から離れる方向へ走行しているのかを区別することができる範囲であればよい。 The traveling direction determination unit determines whether or not the traveling direction of the host vehicle and the traveling direction of the rear vehicle are within a predetermined range. The predetermined range may be a range in which it is possible to distinguish whether the rear vehicle is traveling in a direction approaching the host vehicle or in a direction away from the host vehicle.
送信部は、進行方向判定部で所定の範囲内にあると判定した後方車両へ注意情報を送信する。これにより、自車両に近づく方向、すなわち注意事象が存在する位置の方へ走行する後方車両だけに注意情報を送信することができ、自車両から離れる方向へ走行する後方車両には、不要な情報が送信されることを防止することができる。 The transmission unit transmits the caution information to the rear vehicle determined by the traveling direction determination unit as being within a predetermined range. As a result, the caution information can be transmitted only to the rear vehicle traveling in the direction approaching the own vehicle, that is, toward the position where the caution event exists, and unnecessary information for the rear vehicle traveling in the direction away from the own vehicle. Can be prevented from being transmitted.
本発明の実施の形態に係る車載装置は、前方車両から注意情報を受信する受信部を備え、前記送信部は、前記受信部で注意情報を受信した場合、受信した注意情報を後方車両へ送信する。 An in-vehicle device according to an embodiment of the present invention includes a receiving unit that receives caution information from a preceding vehicle, and the transmitting unit transmits the received caution information to a rear vehicle when the receiving unit receives the caution information. To do.
前方車両から注意情報を受信する受信部を備える。送信部は、受信部で注意情報を受信した場合、受信した注意情報を後方車両へ送信する。これにより、自車両と車車間通信が可能な後方車両だけでなく、当該後方車両と車車間通信が可能な他の後方車両にも注意情報を提供することができる。 A receiving unit is provided for receiving caution information from the vehicle ahead. A transmission part transmits the received attention information to a back vehicle, when attention information is received in a receiving part. Accordingly, the caution information can be provided not only to the rear vehicle capable of communicating with the host vehicle but also to other rear vehicles capable of communicating with the rear vehicle.
[本願発明の実施形態の詳細]
以下、本発明に係る車載装置、コンピュータプログラム及び注意情報提供方法の実施の形態を示す図面に基づいて説明する。図1は本実施の形態の車載装置50を搭載した自車両100の要部構成の一例を示す説明図である。図1に示すように、本実施の形態の車載装置50には、車載LANなどの通信線1を介してブレーキ制御装置2、外部センサ3、トランスミッションコントローラ4、ナビゲーション装置5、HUD(Head-Up Display)6などを接続してある。
[Details of the embodiment of the present invention]
DESCRIPTION OF EMBODIMENTS Hereinafter, an in-vehicle apparatus, a computer program, and an attention information providing method according to embodiments of the present invention will be described with reference to the drawings. FIG. 1 is an explanatory diagram illustrating an example of a configuration of a main part of a
ブレーキ制御装置2は、自車両100の車速を車載装置50へ出力する。また、ブレーキ制御装置2は、自車両100の運転者がブレーキ操作を行った場合、ブレーキ操作情報を車載装置50へ出力する。
The
外部センサ3は、例えば、車載カメラ又はライダー(LIDAR:Laser Imaging Detection and Ranging)などを含み、自車両100の周辺情報を取得する。外部センサ3は、処理部を備え、例えば、車載カメラで自車両100の前方を撮像して得られた画像を解析し、あるいはライダーで得られたデータを解析することにより、対向車両が存在するか否か、及び対向車両が大型であるか否かを判定することができる。また、外部センサ3は、道路の幅、対向車両の車幅などを特定することができる。外部センサ3は、判定結果及び特定結果を車載装置50へ出力する。なお、図1の例では、外部センサ3は、通信線1を介して車載装置50に接続された構成を示すが、これに限定されるものではなく、専用線(不図示)を介して外部センサ3を車載装置50に接続してもよい。また、前述の処理部は、車載装置50に設けることもできる。
The
トランスミッションコントローラ4は、自車両100の変速情報(シフト情報)を車載装置50へ出力する。変速情報は、自車両100の変速機の変速位置であり、例えば、前進位置(D:ドライブ、1速、2速など)、後退位置(R:リバース)などを含む。
The
ナビゲーション装置5は、地図情報、GPS受信部等を内蔵し、不図示の車速センサ、ジャイロセンサ等からの情報に基づいて、自車両100の位置、速度、進行方向等を所定の時間周期(例えば、0.1秒)で求めることができる。ナビゲーション装置5は、自車両100の位置(現在地)、進行方向などの情報を車載装置50へ出力する。
The
HUD6は、車載装置50が生成する注意情報を表示することができる。注意情報の詳細は後述する。なお、HUD6に代えて、運転者に注意情報を提供することができるものであれば、他の表示装置、音声出力装置などを用いることもできる。
The
車載装置50は、装置全体を制御する制御部10、インタフェース部11、GPS(Global Positioning System)12、判定部13、生成部14、記憶部15、第1通信部16、第2通信部17、道路判定部18、進行方向判定部19などを備える。
The in-
インタフェース部11は、通信線1を介して、ブレーキ制御装置2、外部センサ3、トランスミッションコントローラ4、ナビゲーション装置5、HUD6との間でのインタフェース機能を有する。
The
インタフェース部11は、位置取得部としての機能を有し、ナビゲーション装置5から自車両100の位置を取得する。また、インタフェース部11は、変速位置取得部としての機能を有し、自車両100の変速機の変速位置(シフト情報)を取得する。また、インタフェース部11は、車速取得部としての機能を有し、自車両100の車速を取得する。
The
インタフェース部11は、道路情報取得部としての機能を有し、ナビゲーション装置5から道路情報を取得する。道路情報は、例えば、地図情報などから取得することができる。また、インタフェース部11は、自車両進行方向取得部としての機能を有し、ナビゲーション装置5から自車両100の進行方向を取得する。
The
GPS12は、自車両100の位置を取得する位置取得部としての機能を有する。なお、自車両100の位置は、GPS12で取得してもよく、ナビゲーション装置5から取得するようにしてもよい。
The
判定部13は、道路の通行に係る注意事象の有無を判定する。通行に係る注意事象とは、道路を通行する際に運転者が注意しなければならない事象であり、例えば、対向車両、二輪車又は歩行者とすれ違うことが困難な場合、工事などで道路を通過することが困難な場合を含む。
The
生成部14は、判定部13で注意事象があると判定した場合、取得した自車両100の位置に基づいて、当該注意事象が存在する旨及び当該注意事象の位置を含む注意情報を生成する。注意事象の位置は、注意事象が存在すると判定した場合の自車両100の位置でもよく、注意事象の存在位置でもよく、自車両100の位置を含む所要の区間でもよい。
When the
第1通信部16は、送信部及び受信部としての機能を有し、自車両と異なる他の車両との間で車車間通信を行う。車車間通信は、例えば、ITS(Intelligent Transport System)無線を利用するものであるが、これに限定されるものではない。
The
第1通信部16は、制御部10の制御の下、生成部14で生成した注意情報を自車両の後方を走行する後方車両へ送信する。これにより、後方車両の運転者は、走行先のどの当たりに注意事象が存在するかを事前に知ることができ、注意が喚起されるので、衝突事故など発生を未然に防止することができる。
The
第2通信部17は、後述のサーバ又は路側装置(不図示)との間の路車間通信を行う機能を有する。路車間通信は、例えば、800MHz〜2GHzの帯域の携帯電話網(例えば、LTE[Long Term Evolution]、4G、3Gなど)を利用するもの、2.4GHzの帯域の無線LAN(例えば、WiFiなど)を利用するものがあるが、これらに限定されるものではない。ネットワークを経由し、接続先に管理ユニット(以下、サーバ)を備える。サーバは道路の障害物情報を生成し、車両からの要求に応じて経路情報又は交通情報などを送信することができる。
The
第2通信部17は、制御部10の制御の下、生成部14で生成した注意情報を後述のサーバへ送信する。
The
記憶部15は、生成部14で生成した注意情報、第1通信部16又は第2通信部17で受信した注意情報などを記憶する。また、記憶部15は、自車両100の位置など車両の走行状況に関する情報を記憶することもできる。
The
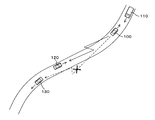
図2は本実施の形態の車載装置50による注意情報の提供の第1例を示す模式図である。図2は自車両100が特定道路を走行している様子を示す。特定道路は、例えば、市街地の道路を除いた道路であり、山間部の道路又は農村部の道路等であって、例えば、所要の距離に亘って信号がない道路、カーブが多い道路、道路幅が狭い道路などを含めることができる。図2に示すように、自車両100の前方には対向車両110が自車両100に向かって走行している。対向車両110は、例えば、バス、トラック等の大型車両とすることができる。また、自車両100の後方(例えば、自車両100から数百m以内の位置)には、自車両100と同じ方向に走行する後方車両120が存在している。
FIG. 2 is a schematic diagram showing a first example of provision of caution information by the in-
図2に示す状態で、自車両100(車載装置50)の判定部13が対向車両110とすれ違うことが困難であると判定した場合、第1通信部16は、生成部14で生成した注意情報を後方車両120へ送信する(図2中符号Aで示す)。また、第2通信部17は、生成部14で生成した注意情報をサーバ200へ送信する(図2中符号Bで示す)。
In the state illustrated in FIG. 2, when the
サーバ200は、注意情報を受信する。サーバ200は、注意情報に含まれる注意事象の位置及び地図情報から、例えば、注意事象の箇所(例えば、自車両100と対向車両110とがすれ違う箇所)数百m〜5km程度後方を走行する他の車両へ受信した注意情報を送信する。図2の例では、サーバ200は、後方車両120へ注意情報を送信しているが、他の車両は後方車両120に限定されない。なお、自車両100と後方車両120との間で車車間通信ができない場合でも、後方車両120は、注意情報をサーバ200から受信することができるので、後方車両120の運転者は、事前に、すれ違いが困難となるような対向車両110が接近することを認識することができる。
The
次に、注意事象の有無の判定方法について、具体的に説明する。 Next, a method for determining the presence / absence of a caution event will be specifically described.
判定部13は、インタフェース部11を介して取得した変速位置が前進位置から後退位置になった場合、注意事象があると判定する。走行していた自車両100が、後退するのは、例えば、狭い道路で対向車両110が存在するため、対向車両110とすれ違いができる地点まで一旦自車両100を後退させる場合と考えることができる。そこで、変速位置が前進位置から後退位置になった場合には、すれ違いが困難となるような注意事象が存在すると判定することができる。これにより、自車両100の挙動により、注意事象の有無を判定することができる。なお、交差点の道幅が狭く、一度切り返さないと曲がりきれないような箇所、あるいは駐車場内等において、誤って判定される可能性を低減すべく、判定部13で後述の判定処理を行うことができる。
The
また、判定部13は、所定時間の間に、自車両100の車速が所定速度以上の速度から所定の下限値以下の速度になった場合、注意事象があると判定する。所定時間は、例えば、1秒〜5秒程度の時間とすることができる。所定速度は、例えば、自車両が走行している道路の制限速度とすることができる。また、下限値は、例えば、10km/hとすることができる。
Further, the
所定速度以上で走行していた自車両100の運転者が、例えば、前方から対向車両110の接近を視認すると、ブレーキ操作を行って自車両100を減速させる。さらに対向車両110が接近し、対向車両110とのすれ違いが困難であると判断すると、さらに減速することが考えられる。そこで、自車両100の車速が所定速度以上の速度から所定の下限値以下の速度になった場合には、すれ違いが困難となるような注意事象が存在すると判定することができる。これにより、自車両100の挙動により、注意事象の有無を判定することができる。
When the driver of the
また、判定部13は、外部センサ3で取得した周辺情報に基づいて、注意事象があると判定する。例えば、車載カメラで自車両100の前方を撮像して得られた画像を解析した結果、あるいはライダーで得られたデータを解析した結果により、対向車両110の存在だけでなく対向車両110が大型であるか否かも判定することができる。また、道路の幅、対向車両110の車幅などを特定することにより、すれ違いが困難となるような注意事象の存在の有無をさらに精度よく判定することができる。
The
また、判定部13は、自車両100が走行している道路の道路情報を用いて、注意事象の有無を判定することができる。すなわち、道路判定部18は、インタフェース部11で取得した道路情報に基づいて、自車両100が走行する道路が特定道路であるか否かを判定する。特定道路は、例えば、市街地の道路を除いた、山間部の道路又は農村部の道路等であり、所要の距離に亘って信号がない道路、カーブが多い道路、道路幅が狭い道路などを含めることができる。
Moreover, the
そして、判定部13は、自車両100が走行する道路が特定道路である場合、注意事象があると判定する。自車両100が特定道路を走行する場合には、注意事象に遭遇する機会が一層多くなると考えることができる。そこで、自車両100が走行する道路が特定道路であるか否かを判定することにより、すれ違いが困難となるような注意事象が存在するか否かをさらに精度よくと判定することができる。
Then, the
次に、車車間通信について説明する。第1通信部16は、車車間通信判定部としての機能を有する。第1通信部16は、後方車両120との間で車車間通信が可能であるか否かを判定する。車車間通信は、車両(車載装置)同士の直接通信を実現するものであり、例えば、ITS(Intelligent Transport Systems)の所定の周波数帯を使用することができる。車車間通信により車両の走行状況(位置、速度、進行方向など)をリアルタイムで取得することができる。車車間通信が可能とは、単に通信が可能というだけではなく、所定のセキュリティ機能が得られる通信が可能ということも含む。
Next, vehicle-to-vehicle communication will be described. The
セキュリティ機能には、例えば、以下のようなものが含まれる。例えば、通信経路が暗号化されたプロトコルの採用により車両情報や個人情報が含まれるデータに対して機密性を確保する。また、車載LANのバス負荷の増加を防止し、あるいは車載LAN上の機器の誤動作を防止するため不正な信号を送信しない。また、誤った情報を受信して運転者を混乱させないため、車車間通信は信頼できる車両とのみ行う。そして、車車間通信が確立したときのみ注意情報を送信する。また、車載装置50が生成した注意情報(自車両100の位置情報も含む)は、車車間通信が確立した後方車両及びサーバ200のみへ送信し、例えば、不正なURL等へ送信されていないことを保証する。
Examples of the security function include the following. For example, confidentiality is ensured for data including vehicle information and personal information by adopting a protocol whose communication path is encrypted. In addition, an illegal signal is not transmitted in order to prevent an increase in the bus load of the in-vehicle LAN or to prevent malfunction of a device on the in-vehicle LAN. In addition, vehicle-to-vehicle communication is performed only with a reliable vehicle so as not to confuse the driver by receiving erroneous information. The caution information is transmitted only when the inter-vehicle communication is established. In addition, the attention information (including the position information of the host vehicle 100) generated by the in-
第1通信部16は、車車間通信が可能であると判定した後方車両120へ注意情報を送信する。これにより、車車間通信が可能な後方車両120のみへ注意情報を送信することができ、注意情報を送信する送信先を限定することができ、不要な情報が送出されることを防止することができる。
The
図3は本実施の形態の車載装置50による注意情報の提供の第2例を示す模式図である。図3に示すように、自車両100の前方には対向車両110が自車両100に向かって走行している。また、自車両100の後方には、自車両100と同じ方向(自車両100へ近づく方向)に走行する後方車両120、自車両100と反対の方向(自車両100から遠ざかる方向)に走行する後方車両130が存在している。以下の説明では、自車両100と後方車両120、130それぞれとは車車間通信が可能である(車車間通信が確立した)とする。
FIG. 3 is a schematic diagram showing a second example of provision of caution information by the in-
第1通信部16は、後方車両進行方向取得部としての機能を有し、後方車両120、130の進行方向を取得する。
The
進行方向判定部19は、自車両100の進行方向と後方車両120、130の進行方向とが所定の範囲内にあるか否かを判定する。所定の範囲内とは、後方車両が自車両に近づく方向へ走行しているのか、あるいは自車両から離れる方向へ走行しているのかを区別することができる範囲であればよい。
The traveling
第1通信部16は、進行方向判定部19で所定の範囲内にあると判定した後方車両120へ注意情報を送信する。すなわち、図3に示すように、後方車両130は、自車両100と反対方向に走行しているので、注意情報は送信されない。これにより、自車両100に近づく方向、すなわち注意事象が存在する位置の方へ走行する後方車両120だけに注意情報を送信することができ、自車両100から離れる方向へ走行する後方車両130には、不要な情報が送信されることを防止することができる。
The
図4は本実施の形態の車載装置50による注意情報の提供の第3例を示す模式図である。図4に示すように、自車両100の前方には前方車両140が走行している。また、自車両100の後方には、自車両100と同じ方向(自車両100へ近づく方向)に走行する後方車両120が存在している。以下の説明では、自車両100と前方車両140及び後方車両120それぞれとは車車間通信が可能である(確立した)とする。
FIG. 4 is a schematic diagram showing a third example of provision of caution information by the in-
第1通信部16は、前方車両140から注意情報を受信する。第1通信部16は、制御部10の制御のもと、受信した注意情報を後方車両120へ送信する。これにより、前方車両140(自車両に相当)と車車間通信が可能な自車両100(後方車両に相当)だけでなく、自車両100(当該後方車両)と車車間通信が可能な他の後方車両120にも注意情報を提供することができる。
The
図5は本実施の形態の車載装置50による処理手順の第1例を示すフローチャートである。便宜上、以下では処理の主体を制御部10として説明する。制御部10は、自車両100の位置を取得し(S11)、自車両100の車速又はシフト情報を取得する(S12)。制御部10は、シフト位置(変速位置)が前進位置から後退位置へ変化したか否かを判定する(S13)。
FIG. 5 is a flowchart showing a first example of a processing procedure by the in-
シフト位置が前進位置から後退位置へ変化していない場合(S13でNO)、制御部10は、車速が所定時間(例えば、1秒〜5秒程度)以上、下限値(例えば、10km/h)以下になったか否かを判定する(S14)。車速が所定時間以上、下限値以下になった場合(S14でYES)、制御部10は、外部センサから周辺情報を取得する(S15)。なお、周辺情報は、例えば、対向車両が存在するか否かの判定結果、対向車両が大型であるか否かの判定結果、道路の幅及び対向車両の車幅などの特定結果を含む。
When the shift position has not changed from the forward position to the reverse position (NO in S13), the
シフト位置が前進位置から後退位置へ変化した場合(S13でYES)、制御部10は、ステップS14の処理を行うことなく、ステップS15の処理を行う。制御部10は、注意事象(対向車を含む)を検知したか否かを判定し(S16)、注意事象を検知した場合(S16でYES)、対向車注意情報(注意情報)を生成する(S17)。対向車注意情報は、大型の対向車両が存在する旨及び自車両100の位置(対向車両の位置でもよい)を含む。
When the shift position changes from the forward position to the reverse position (YES in S13), the
制御部10は、車車間通信可能な後方車両が存在するか否かを判定し(S18)、後方車両が存在する場合(S18でYES)、対向車注意情報を後方車両へ送信し(S19)、対向車注意情報をサーバ200へ送信し(S20)、処理を終了する。車車間通信可能な後方車両が存在しない場合(S18でNO)、制御部10は、ステップS19の処理を行うことなく、ステップS20の処理を行う。
The
車速が所定時間以上、下限値以下になっていない場合(S14でNO)、あるいは、注意事象を検知していない場合(S16でNO)、制御部10は、処理を終了する。
If the vehicle speed is not less than the predetermined time and not lower than the lower limit (NO in S14), or if no caution event is detected (NO in S16), the
図6は本実施の形態の車載装置50による処理手順の第2例を示すフローチャートである。制御部10は、道路情報を取得し(S31)、自車両100の位置を取得し(S32)、自車両100が特定道路を走行しているか否かを判定する(S33)。特定道路は、例えば、所要の距離に亘って信号がない道路、カーブが多い道路、道路幅が狭い道路などである。
FIG. 6 is a flowchart showing a second example of the processing procedure by the in-
自車両100が、特定道路を走行している場合(S33でYES)、制御部10は、自車両100の車速又はシフト情報を取得する(S34)。制御部10は、シフト位置(変速位置)が前進位置から後退位置へ変化したか否かを判定する(S35)。
When the
シフト位置が前進位置から後退位置へ変化していない場合(S35でNO)、制御部10は、車速が所定時間(例えば、1秒〜5秒程度)以上、下限値(例えば、10km/h)以下になったか否かを判定する(S36)。車速が所定時間以上、下限値以下になった場合(S36でYES)、制御部10は、外部センサから周辺情報を取得する(S37)。なお、周辺情報は、例えば、対向車両が存在するか否かの判定結果、対向車両が大型であるか否かの判定結果、道路の幅及び対向車両の車幅などの特定結果を含む。
When the shift position has not changed from the forward position to the reverse position (NO in S35), the
シフト位置が前進位置から後退位置へ変化した場合(S35でYES)、制御部10は、ステップS36の処理を行うことなく、ステップS37の処理を行う。制御部10は、注意事象(対向車を含む)を検知したか否かを判定し(S38)、注意事象を検知した場合(S38でYES)、対向車注意情報(注意情報)を生成する(S39)。
When the shift position changes from the forward position to the reverse position (YES in S35), the
制御部10は、車車間通信可能な後方車両が存在するか否かを判定し(S40)、後方車両が存在する場合(S40でYES)、対向車注意情報を後方車両へ送信し(S41)、対向車注意情報をサーバ200へ送信し(S42)、処理を終了する。車車間通信可能な後方車両が存在しない場合(S40でNO)、制御部10は、ステップS41の処理を行うことなく、ステップS42の処理を行う。
The
自車両100が特定道路を走行していない場合(S33でNO)、車速が所定時間以上、下限値以下になっていない場合(S36でNO)、あるいは、注意事象を検知していない場合(S38でNO)、制御部10は、処理を終了する。
When the
図7は本実施の形態の車載装置50による処理手順の第3例を示すフローチャートである。図7の例では、自車両100の前方に前方車両が存在する場合、前方車両は対向車注意情報を生成したとする。制御部10は、車車間通信可能な前方車両が存在するか否かを判定し(S51)、前方車両が存在する場合(S51でYES)、対向車注意情報を前方車両から受信する(S52)。
FIG. 7 is a flowchart showing a third example of the processing procedure by the in-
車車間通信可能な前方車両が存在しない場合(S51でNO)、制御部10は、サーバ200から対向車注意情報を受信したか否かを判定する(S53)。サーバ200から対向車注意情報を受信していない場合(S53でNO)、制御部10は、ステップS51以降の処理を続ける。サーバ200から対向車注意情報を受信した場合(S53でYES)、制御部10は、後述のステップS54の処理を行う。
When there is no forward vehicle capable of inter-vehicle communication (NO in S51), the
制御部10は、HUD6を用いて対向車注意情報を運転者に提供し(S54)、車車間通信可能な後方車両が存在するか否かを判定する(S55)。後方車両が存在する場合(S55でYES)、制御部10は、受信した対向車注意情報を後方車両へ送信し(S56)、処理を終了する。車車間通信可能な後方車両が存在しない場合(S55でNO)、制御部10は、ステップS56の処理を行うことなく、処理を終了する。
The
本実施の形態の車載装置50は、CPU(プロセッサ)、RAMなどを備えた汎用コンピュータを用いて実現することもできる。すなわち、図5、図6及び図7に示すような、各処理の手順を定めたコンピュータプログラムをコンピュータに備えられたRAMにロードし、コンピュータプログラムをCPU(プロセッサ)で実行することにより、コンピュータ上で車載装置50を実現することができる。
The in-
本実施の形態の車載装置50によれば、例えば、カーブが多く前方の視界が死角となるような箇所が多い道路などを走行している場合に、すれ違いが困難となり衝突事故又は接触事故が起こる可能性が高くなる対向車両(特に大型の対向車両)が、進行方向の前方から接近していることが、運転者の視界に入る前に事前に分かるとともに、注意喚起されるので、衝突事故又は接触事故などを未然に防ぐことができる。
According to the in-
また、本実施の形態の車載装置50によれば、車両の挙動(例えば、シフト操作、ブレーキ操作など)に基づいて注意事象の有無を判定するので、例えば、過去の多くの車両の走行履歴等を参照して、すれ違い困難区間のようなものを予め設定しておく必要はない。
Further, according to the in-
上述の実施の形態では、通行に係る注意事象として、対向車両について説明したが、本実施の形態は、対向車両だけでなく、例えば、二輪車、歩行者又は道路工事などの事象がある場合にも適用することができる。 In the above-described embodiment, the oncoming vehicle has been described as the attention event related to traffic. However, this embodiment is not limited to the oncoming vehicle, but may include an event such as a motorcycle, a pedestrian, or road construction. Can be applied.
開示された実施の形態は、すべての点で例示であって制限的なものではないと考えられるべきである。本発明の範囲は上記した説明ではなくて特許請求の範囲によって示され、特許請求の範囲と均等の意味及び範囲内でのすべての変更が含まれることが意図される。 The disclosed embodiments are to be considered in all respects as illustrative and not restrictive. The scope of the present invention is defined by the terms of the claims, rather than the description above, and is intended to include any modifications within the scope and meaning equivalent to the terms of the claims.
1 通信線
2 ブレーキ制御装置
3 外部センサ
4 トランスミッションコントローラ
5 ナビゲーション装置
6 HUD
10 制御部
11 インタフェース部
12 GPS
13 判定部
14 生成部
15 記憶部
16 第1通信部
17 第2通信部
18 道路判定部
19 進行方向判定部
50 車載装置
100 自車両
110 対向車両
120、130 後方車両
140 前方車両
1
10
DESCRIPTION OF
Claims (10)
自車両の位置を取得する位置取得部と、
道路の通行に係る注意事象の有無を判定する判定部と、
該判定部で注意事象があると判定した場合、前記位置取得部で取得した位置に基づいて、前記注意事象が存在する旨及び該注意事象の位置を含む注意情報を生成する生成部と、
該生成部で生成した注意情報を後方車両へ送信する送信部と
を備える車載装置。 An in-vehicle device mounted on a vehicle,
A position acquisition unit for acquiring the position of the host vehicle;
A determination unit for determining presence or absence of an attention event related to traffic on the road;
When the determination unit determines that there is a caution event, based on the position acquired by the position acquisition unit, a generation unit that generates the caution information including the presence of the caution event and the position of the caution event,
A vehicle-mounted device comprising: a transmitter that transmits the attention information generated by the generator to a rear vehicle.
前記判定部は、
変速位置が前進位置から後退位置になった場合、注意事象があると判定する請求項1に記載の車載装置。 A shift position acquisition unit for acquiring a shift position of the transmission of the host vehicle;
The determination unit
The in-vehicle device according to claim 1, wherein when the shift position is changed from the forward position to the reverse position, it is determined that there is a caution event.
前記判定部は、
所定時間の間に、自車両の車速が所定速度以上の速度から所定の下限値以下の速度になった場合、注意事象があると判定する請求項1又は請求項2に記載の車載装置。 It has a vehicle speed acquisition unit that acquires the vehicle speed of its own vehicle,
The determination unit
The in-vehicle device according to claim 1 or 2, wherein when the vehicle speed of the host vehicle is changed from a speed equal to or higher than a predetermined speed to a speed equal to or lower than a predetermined lower limit value during a predetermined time, it is determined that there is a caution event.
前記判定部は、
前記外部センサで取得した周辺情報に基づいて、注意事象があると判定する請求項1から請求項3までのいずれか1項に記載の車載装置。 It has an external sensor that acquires the surrounding information of the vehicle,
The determination unit
The in-vehicle device according to any one of claims 1 to 3, wherein it is determined that there is a caution event based on peripheral information acquired by the external sensor.
該道路情報取得部で取得した道路情報に基づいて、自車両が走行する道路が特定道路であるか否かを判定する道路判定部と
を備え、
前記判定部は、
自車両が走行する道路が特定道路である場合、注意事象があると判定する請求項1から請求項4までのいずれか1項に記載の車載装置。 A road information acquisition unit for acquiring road information;
A road determination unit that determines whether the road on which the vehicle travels is a specific road based on the road information acquired by the road information acquisition unit,
The determination unit
The in-vehicle device according to any one of claims 1 to 4, wherein when the road on which the host vehicle travels is a specific road, it is determined that there is a caution event.
前記送信部は、
前記車車間通信判定部で車車間通信が可能であると判定した後方車両へ前記注意情報を送信する請求項1から請求項5までのいずれか1項に記載の車載装置。 A vehicle-to-vehicle communication determination unit that determines whether vehicle-to-vehicle communication is possible with a rear vehicle,
The transmitter is
The in-vehicle device according to any one of claims 1 to 5, wherein the caution information is transmitted to a rear vehicle determined to be capable of inter-vehicle communication by the inter-vehicle communication determination unit.
後方車両の進行方向を取得する後方車両進行方向取得部と、
自車両の進行方向と前記後方車両の進行方向とが所定の範囲内にあるか否かを判定する進行方向判定部と
を備え、
前記送信部は、
前記進行方向判定部で所定の範囲内にあると判定した後方車両へ前記注意情報を送信する請求項1から請求項6までのいずれか1項に記載の車載装置。 A host vehicle traveling direction acquisition unit that acquires a traveling direction of the host vehicle;
A rear vehicle traveling direction acquisition unit for acquiring a traveling direction of the rear vehicle;
A traveling direction determination unit that determines whether the traveling direction of the host vehicle and the traveling direction of the rear vehicle are within a predetermined range;
The transmitter is
The in-vehicle device according to any one of claims 1 to 6, wherein the caution information is transmitted to a rear vehicle determined by the traveling direction determination unit as being within a predetermined range.
前記送信部は、
前記受信部で注意情報を受信した場合、受信した注意情報を後方車両へ送信する請求項1から請求項7までのいずれか1項に記載の車載装置。 It has a receiver that receives caution information from the vehicle ahead,
The transmitter is
The in-vehicle device according to any one of claims 1 to 7, wherein when the attention information is received by the receiving unit, the received attention information is transmitted to a rear vehicle.
コンピュータを、
自車両の位置を取得する位置取得部と、
道路の通行に係る注意事象の有無を判定する判定部と、
前記注意事象があると判定した場合、取得した自車両の位置に基づいて、前記注意事象が存在する旨及び該注意事象の位置を含む注意情報を生成する生成部と、
生成した注意情報を後方車両へ出力する出力部と
して機能させるコンピュータプログラム。 A computer program for causing a computer to provide caution information,
Computer
A position acquisition unit for acquiring the position of the host vehicle;
A determination unit for determining presence or absence of an attention event related to traffic on the road;
When it is determined that there is the attention event, based on the acquired position of the own vehicle, a generation unit that generates the attention information including the presence of the attention event and the position of the attention event,
A computer program that functions as an output unit that outputs generated attention information to the vehicle behind you.
自車両の位置を位置取得部が取得し、
道路の通行に係る注意事象の有無を判定部が判定し、
前記注意事象があると判定された場合、取得された自車両の位置に基づいて、前記注意事象が存在する旨及び該注意事象の位置を含む注意情報を生成部が生成し、
生成された注意情報を後方車両へ送信部が送信する注意情報提供方法。 A method for providing caution information by an in-vehicle device mounted on a vehicle,
The position acquisition unit acquires the position of the vehicle,
The determination unit determines the presence or absence of caution events related to road traffic,
When it is determined that there is the attention event, the generation unit generates attention information including the presence of the attention event and the position of the attention event based on the acquired position of the host vehicle.
A caution information providing method in which the transmitter transmits the generated caution information to the rear vehicle.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016022088A JP2017142579A (en) | 2016-02-08 | 2016-02-08 | On-vehicle device, computer program and caution information provision method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016022088A JP2017142579A (en) | 2016-02-08 | 2016-02-08 | On-vehicle device, computer program and caution information provision method |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2017142579A true JP2017142579A (en) | 2017-08-17 |
Family
ID=59627449
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2016022088A Pending JP2017142579A (en) | 2016-02-08 | 2016-02-08 | On-vehicle device, computer program and caution information provision method |
Country Status (1)
| Country | Link |
|---|---|
| JP (1) | JP2017142579A (en) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019079159A (en) * | 2017-10-23 | 2019-05-23 | 株式会社国際電気通信基礎技術研究所 | Information acquisition device, mobile body, information acquisition method, and program |
| US20200234591A1 (en) * | 2019-01-18 | 2020-07-23 | Toyota Jidosha Kabushiki Kaisha | Vehicle, vehicle control method, and vehicle control program |
| JP2021033667A (en) * | 2019-08-26 | 2021-03-01 | パイオニア株式会社 | Map data generation method |
| CN113393704A (en) * | 2020-03-13 | 2021-09-14 | 丰田自动车株式会社 | Communication device, communication system, vehicle, non-transitory computer-readable medium, and communication method |
| WO2022190481A1 (en) * | 2021-03-12 | 2022-09-15 | 株式会社Jvcケンウッド | Recording device for vehicle and recording method |
-
2016
- 2016-02-08 JP JP2016022088A patent/JP2017142579A/en active Pending
Cited By (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2019079159A (en) * | 2017-10-23 | 2019-05-23 | 株式会社国際電気通信基礎技術研究所 | Information acquisition device, mobile body, information acquisition method, and program |
| US20200234591A1 (en) * | 2019-01-18 | 2020-07-23 | Toyota Jidosha Kabushiki Kaisha | Vehicle, vehicle control method, and vehicle control program |
| US11043126B2 (en) | 2019-01-18 | 2021-06-22 | Toyota Jidosha Kabushiki Kaisha | Vehicle, vehicle control method, and vehicle control program |
| JP2021033667A (en) * | 2019-08-26 | 2021-03-01 | パイオニア株式会社 | Map data generation method |
| CN113393704A (en) * | 2020-03-13 | 2021-09-14 | 丰田自动车株式会社 | Communication device, communication system, vehicle, non-transitory computer-readable medium, and communication method |
| US11511764B2 (en) | 2020-03-13 | 2022-11-29 | Toyota Jidosha Kabushiki Kaisha | Communication apparatus, communication system, vehicle, non-transitory computer-readable medium, and communication method |
| CN113393704B (en) * | 2020-03-13 | 2023-06-27 | 丰田自动车株式会社 | Communication device, communication system, vehicle, non-transitory computer readable medium, and communication method |
| WO2022190481A1 (en) * | 2021-03-12 | 2022-09-15 | 株式会社Jvcケンウッド | Recording device for vehicle and recording method |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11004280B1 (en) | Determining corrective actions based upon broadcast of telematics data originating from another vehicle | |
| WO2017145650A1 (en) | In-vehicle device and road anomaly warning system | |
| JP2017142579A (en) | On-vehicle device, computer program and caution information provision method | |
| US20220319318A1 (en) | Driving assist device, driving assist system, and driving assist method | |
| WO2018163407A1 (en) | Information processing device, information processing method, and information processing program | |
| JP2017111498A (en) | Driving support device | |
| JP6229905B2 (en) | Reverse run prevention system | |
| KR101730153B1 (en) | Method and apparatus for alarming vehicle accident based on beacon | |
| JP2018036785A (en) | Collision prevention device, computer program, and collision prevention method | |
| KR102299821B1 (en) | Apparatus for collecting traffic information and method for providing traffic information using thereof | |
| US20240135829A1 (en) | Taking corrective action based upon telematics data broadcast from another vehicle | |
| JP2023055630A (en) | Pre-collision denm message in intelligent transportation system | |
| JP2018190028A (en) | Driving support device | |
| JP2018180882A (en) | Driving support device |