JP2014211661A - Detection device, detection method, and detection program - Google Patents
Detection device, detection method, and detection program Download PDFInfo
- Publication number
- JP2014211661A JP2014211661A JP2011185694A JP2011185694A JP2014211661A JP 2014211661 A JP2014211661 A JP 2014211661A JP 2011185694 A JP2011185694 A JP 2011185694A JP 2011185694 A JP2011185694 A JP 2011185694A JP 2014211661 A JP2014211661 A JP 2014211661A
- Authority
- JP
- Japan
- Prior art keywords
- data
- averaging
- angle
- storage
- less
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Withdrawn
Links
Images



Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V40/00—Recognition of biometric, human-related or animal-related patterns in image or video data
- G06V40/10—Human or animal bodies, e.g. vehicle occupants or pedestrians; Body parts, e.g. hands
- G06V40/107—Static hand or arm
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/70—Determining position or orientation of objects or cameras
- G06T7/73—Determining position or orientation of objects or cameras using feature-based methods
- G06T7/74—Determining position or orientation of objects or cameras using feature-based methods involving reference images or patches
Abstract
Description
本発明は、検出装置、検出方法および検出プログラムに関し、より詳しくは、センサに接触または近接した物体の方向を検出する検出装置、検出方法および検出プログラムに関する。 The present invention relates to a detection device, a detection method, and a detection program, and more particularly to a detection device, a detection method, and a detection program that detect the direction of an object that is in contact with or close to a sensor.
近年、タッチパネルに代表される検出装置を備えた機器が急速に普及している。これらの機器の機能は多様化・複雑化しており、これに伴ってより多彩な操作方法が求められている。 In recent years, devices equipped with a detection device typified by a touch panel are rapidly spreading. The functions of these devices are diversified and complicated, and accordingly, more various operation methods are required.
特許文献1には、タッチパネル上の指の形状から、ユーザの手の方向を判定するタッチパネル式入力装置が記載されている。
しかしながら、特にセンサ(タッチパネル)の感度が低い場合、入力されたデータ(指の形状)によっては、正確な認識ができないときがある。このようなとき、判定された方向が不正確になったり、揺らいだりする。 However, when the sensitivity of the sensor (touch panel) is particularly low, accurate recognition may not be possible depending on the input data (finger shape). In such a case, the determined direction becomes inaccurate or fluctuates.
本発明の目的は、センサの感度が十分でない場合でも、センサに接触または近接した物体(例えば、指、ペン等の入力装置、観察対象の物品等)の二次元像から、物体の方向を安定して求めることができる、検出装置、検出方法および検出プログラムを得ることである。 The object of the present invention is to stabilize the direction of an object from a two-dimensional image of an object (for example, an input device such as a finger or a pen, an object to be observed) that is in contact with or close to the sensor even when the sensitivity of the sensor is not sufficient. And obtaining a detection device, a detection method, and a detection program.
以下に開示する検出装置は、接触または近接した物体の二次元像を認識可能なセンサ部と、前記センサ部に認識された二次元像から、前記物体の方向を表す方向データを出力する方向演算部と、前記方向演算部が出力する方向データを連続的にサンプリングして記憶する記憶部と、前記記憶部に記憶された方向データに基づいて平均化処理を行う平均化処理部とを備える。 The detection device disclosed below includes a sensor unit capable of recognizing a two-dimensional image of an object that is in contact with or in proximity, and a direction calculation that outputs direction data representing the direction of the object from the two-dimensional image recognized by the sensor unit. A storage unit that continuously samples and stores the direction data output from the direction calculation unit, and an averaging processing unit that performs an averaging process based on the direction data stored in the storage unit.
また、以下に開示する検出方法は、二次元像のデータから、前記データ内の物体の方向を表す方向データを出力する方向演算処理と、前記方向演算処理の結果を連続的にサンプリングして記憶する記憶処理と、前記記憶処理により記憶されたデータに基づいて行う平均化処理とを含む。 In addition, the detection method disclosed below outputs a direction calculation process that outputs direction data representing the direction of an object in the data from two-dimensional image data, and continuously samples and stores the result of the direction calculation process. Storage processing, and averaging processing performed based on the data stored by the storage processing.
また、以下に開示するコンピュータプログラムは、二次元像のデータから、前記データ内の物体の方向を表す方向データを出力する方向演算処理と、前記方向演算処理の結果を連続的にサンプリングして記憶する記憶処理と、前記記憶処理により記憶されたデータに基づいて行う平均化処理とをコンピュータに実行させる。 In addition, the computer program disclosed below outputs a direction calculation process for outputting direction data representing the direction of an object in the data from two-dimensional image data, and continuously samples and stores the result of the direction calculation process. Storage processing to be performed, and averaging processing to be performed based on the data stored by the storage processing.
センサの感度が十分でない場合でも、センサに接触または近接した物体(例えば、指、ペン等の入力装置、観察対象の物品等)の二次元像から、物体の方向を安定して求めることができる、検出装置、検出方法および検出プログラムを得ることができる。 Even when the sensitivity of the sensor is not sufficient, the direction of the object can be stably obtained from a two-dimensional image of an object that is in contact with or close to the sensor (for example, an input device such as a finger or a pen, or an article to be observed). , A detection apparatus, a detection method, and a detection program can be obtained.
本発明の一実施形態にかかる検出装置は、接触または近接した物体の二次元像を認識可能なセンサ部と、前記センサ部に認識された二次元像から、前記物体の方向を表す方向データを出力する方向演算部と、前記方向演算部が出力する方向データを連続的にサンプリングして記憶する記憶部と、前記記憶部に記憶された方向データに基づいて平均化処理を行う平均化処理部とを備える(検出装置の第1の構成)。 A detection apparatus according to an embodiment of the present invention includes a sensor unit capable of recognizing a two-dimensional image of an object that is in contact with or in close proximity, and direction data representing the direction of the object from the two-dimensional image recognized by the sensor unit. An output direction calculation unit, a storage unit that continuously samples and stores the direction data output by the direction calculation unit, and an averaging processing unit that performs an averaging process based on the direction data stored in the storage unit (A first configuration of the detection device).
上記の構成によれば、記憶部は、方向データを、連続的にサンプリングして記憶する。そして、平均化処理部により、記憶部に記憶された方向データに基づいて平均化処理が行われる。これにより、不正確な方向データや、方向データの揺らぎの影響が緩和され、安定した方向データが得られる。 According to said structure, a memory | storage part samples and memorize | stores direction data continuously. Then, the averaging processing unit performs an averaging process based on the direction data stored in the storage unit. Thereby, the influence of inaccurate direction data and fluctuation of the direction data is alleviated, and stable direction data can be obtained.
なお、この「平均化処理」とは、各データの総和をデータ点数で割った平均(相加平均)を求める処理のみを指すのではなく、各データに重みを付ける加重平均や、相乗平均、調和平均等を求める処理を含む。 Note that this “averaging process” does not only refer to the process of calculating the average (arithmetic mean) of the sum of each data divided by the number of data points, but instead of the weighted average, Includes processing for obtaining harmonic averages and the like.
前記検出装置の第1の構成において、前記記憶部は、前記方向演算部が出力する方向データを、θ1−θ0=360の関係を満たすθ0以上θ1未満の値をとる角度データとして記憶し、前記平均化処理部は、Δθ0およびΔθ1をあらかじめ定めた数として、平均化処理の対象となる前記角度データの全てが、Δθ0超Δθ1未満ではない場合には、Δθ0以下の角度データに360を加える処理と、平均を求める処理と、求められた平均がθ1以上のときにθ1を引く処理とを含む処理を行う構成とすることができる(検出装置の第2の構成)。 In the first configuration of the detection device, the storage unit outputs the direction data output from the direction calculation unit as angle data that takes a value not less than θ 0 and less than θ 1 that satisfies the relationship θ 1 −θ 0 = 360. The averaging processing unit stores Δθ 0 and Δθ 1 as predetermined numbers, and when all of the angle data to be averaged are not more than Δθ 0 and less than Δθ 1 , Δθ 0 The following processing can be performed including processing for adding 360 to the angle data, processing for obtaining an average, and processing for subtracting θ 1 when the obtained average is equal to or greater than θ 1 (the first detection device). 2 configuration).
上記の構成によれば、記憶部は、方向データを、θ1−θ0=360の関係を満たすθ0以上θ1未満の値をとる角度データとして記憶する。これにより、記憶部は、方向データを、一義的に定義された角度データとして記憶する。さらに、平均化処理部は、平均化処理の対象となる角度データの全てが、Δθ0超Δθ1未満ではない場合には、Δθ0以下の角度データに360°を加えてから、平均を求める。これにより、角度の値が循環する問題を回避する。そして、平均化処理部は、求められた平均がθ1以上のときにθ1を引く。これにより、角度を一義的に定義された範囲に修正する。 According to said structure, a memory | storage part memorize | stores direction data as angle data which takes the value more than (theta) 0 and less than (theta) 1 which satisfy | fill the relationship of (theta) 1- (theta) 0 = 360. Thereby, a memory | storage part memorize | stores direction data as angle data defined uniquely. Further, when all the angle data to be averaged are not more than Δθ 0 and less than Δθ 1 , the averaging processing unit adds 360 ° to the angle data equal to or less than Δθ 0 and obtains the average. . This avoids the problem of circulating angle values. Then, averaging processing unit, the average obtained pulls the theta 1 when one or more theta. As a result, the angle is corrected to a uniquely defined range.
なお、ここでは記憶部に記憶された角度を度数法で表しているが、本発明は角度の表記方法によらず適用できる。例えば角度を弧度法で表すときは、上記の360を2πに置き換えれば良い。 Here, the angle stored in the storage unit is expressed by the frequency method, but the present invention can be applied regardless of the angle notation method. For example, when the angle is expressed by the arc method, 360 described above may be replaced with 2π.
前記検出装置の第1の構成において、前記記憶部は、前記方向演算部が出力する方向データを角度データとして記憶し、前記平均化処理部は、前記記憶部に記憶された角度データを、円周上の座標に変換する処理と、前記変換された座標に基づいて平均を求める処理と、前記平均された座標を角度データに変換する処理とを含む処理を行う構成とすることができる(検出装置の第3の構成)。 In the first configuration of the detection device, the storage unit stores the direction data output from the direction calculation unit as angle data, and the averaging processing unit stores the angle data stored in the storage unit as a circle. It can be configured to perform processing including processing for converting to coordinates on the circumference, processing for obtaining an average based on the converted coordinates, and processing for converting the averaged coordinates into angle data (detection) Third configuration of the device).
上記の構成によっても、角度の平均化を行うことができる。 The angle can be averaged also by the above configuration.
前記検出装置の第1〜第3のいずれかの構成において、前記平均化処理部が算出した平均化された方向データの変化に基づいて、回転動作を検出する回転検出部をさらに備える構成としても良い(検出装置の第4の構成)。 In any one of the first to third configurations of the detection device, a configuration may further include a rotation detection unit that detects a rotation operation based on a change in the averaged direction data calculated by the averaging processing unit. Good (4th structure of a detection apparatus).
上記の構成によれば、回転検出部は、方向データの変化に基づいて、回転動作を検出する。従来、タッチパネル上で2本の指を回転させることで、回転動作を入力する入力方法が知られている。本発明の検出装置の第4の構成によれば、例えば、タッチパネル上の指の向きを判定することにより、1本の指で回転動作を入力する入力方法が実現できる。 According to said structure, a rotation detection part detects rotation operation | movement based on the change of direction data. 2. Description of the Related Art Conventionally, an input method for inputting a rotation operation by rotating two fingers on a touch panel is known. According to the 4th structure of the detection apparatus of this invention, the input method which inputs rotation operation with one finger | toe is realizable by determining the direction of the finger | toe on a touch panel, for example.
また、回転検出部は、平均化処理部が算出した平均化された方向データの変化に基づいて、回転動作を検出する。これにより、不正確な方向データや、方向データの揺らぎによりる誤検出を抑制できる。 The rotation detection unit detects a rotation operation based on a change in the averaged direction data calculated by the averaging processing unit. As a result, inaccurate direction data and erroneous detection due to fluctuations in the direction data can be suppressed.
本発明の一実施形態にかかる検出方法は、二次元像のデータから、前記データ内の物体の方向を表す方向データを出力する方向演算処理と、前記方向演算処理の結果を連続的にサンプリングして記憶する記憶処理と、前記記憶処理により記憶されたデータに基づいて行う平均化処理とを含む(検出方法の第1の構成)。 A detection method according to an embodiment of the present invention includes: a direction calculation process that outputs direction data representing the direction of an object in the data from two-dimensional image data; and a result of the direction calculation process is continuously sampled. Storage processing, and averaging processing performed based on the data stored by the storage processing (first configuration of the detection method).
前記検出方法の第1の構成において、前記記憶処理は、前記方向演算処理が算出した方向データを、θ1−θ0=360の関係を満たすθ0以上θ1未満の値をとる角度データとして記憶し、前記平均化処理は、Δθ0およびΔθ1をあらかじめ定めた数として、平均化処理の対象となる前記角度データの全てが、Δθ0超Δθ1未満でない場合には、Δθ0以下の角度データに360を加える処理と、平均を求める処理と、求められた平均がθ1以上のときにθ1を引く処理とを含む構成とすることができる(検出方法の第2の構成)。 In the first configuration of the detection method, the storage process uses the direction data calculated by the direction calculation process as angle data that takes a value not less than θ 0 and less than θ 1 that satisfies the relationship θ 1 −θ 0 = 360. The averaging process stores Δθ 0 and Δθ 1 as predetermined numbers, and when all the angle data to be averaged are not greater than Δθ 0 and less than Δθ 1 , Δθ 0 or less. A process including adding 360 to the angle data, a process of obtaining an average, and a process of subtracting θ 1 when the obtained average is equal to or greater than θ 1 can be employed (second configuration of the detection method).
前記検出方法の第1の構成において、前記記憶処理は、前記方向演算処理が算出した方向データを、角度データとして記憶し、前記平均化処理は、前記記憶処理により記憶された方向データを、円周上の座標に変換する処理と、前記変換された座標に基づいて平均を求める処理と、前記平均された座標を角度データに変換する処理とを含む構成とすることができる(検出方法の第3の構成)。 In the first configuration of the detection method, the storage process stores the direction data calculated by the direction calculation process as angle data, and the averaging process uses the direction data stored by the storage process as a circle. It can be configured to include a process for converting to a coordinate on the circumference, a process for obtaining an average based on the converted coordinate, and a process for converting the averaged coordinate to angle data (first detection method) 3 configuration).
前記検出方法の第1〜第3のいずれかの構成において、前記平均化処理により算出された平均化された方向データの変化に基づいて、回転動作を検出する回転検出処理をさらに含む構成としても良い(検出方法の第4の構成)。 In any one of the first to third configurations of the detection method, a configuration may further include a rotation detection process that detects a rotation operation based on a change in the averaged direction data calculated by the averaging process. Good (fourth configuration of detection method).
本発明の一実施形態にかかるコンピュータプログラムは、二次元像のデータから、前記データ内の物体の方向を表す方向データを出力する方向演算処理と、前記方向演算処理の結果を連続的にサンプリングして記憶する記憶処理と、前記記憶処理により記憶されたデータに基づいて行う平均化処理とをコンピュータに実行させる(コンピュータプログラムの第1の構成)。 A computer program according to an embodiment of the present invention continuously samples direction calculation processing for outputting direction data representing the direction of an object in the data from two-dimensional image data, and results of the direction calculation processing. The computer executes the storage process to be stored and the averaging process based on the data stored by the storage process (first configuration of the computer program).
前記コンピュータプログラムの第1の構成において、前記記憶処理は、前記方向演算処理が算出した方向データを、θ1−θ0=360の関係を満たすθ0以上θ1未満の値をとる角度データとして記憶し、前記平均化処理は、Δθ0およびΔθ1をあらかじめ定めた数として、平均化処理の対象となる前記角度データの全てが、Δθ0超Δθ1未満でない場合には、Δθ0以下の角度データに360を加える処理と、平均を求める処理と、求められた平均がθ1以上のときにθ1を引く処理とを含む構成とすることができる(コンピュータプログラムの第2の構成)。 In the first configuration of the computer program, the storage process uses the direction data calculated by the direction calculation process as angle data that takes a value not less than θ 0 and less than θ 1 that satisfies the relationship θ 1 −θ 0 = 360. The averaging process stores Δθ 0 and Δθ 1 as predetermined numbers, and when all the angle data to be averaged are not greater than Δθ 0 and less than Δθ 1 , Δθ 0 or less. The processing may include a process of adding 360 to the angle data, a process of obtaining an average, and a process of subtracting θ 1 when the obtained average is equal to or greater than θ 1 (second configuration of the computer program).
前記コンピュータプログラムの第1の構成において、前記記憶処理は、前記方向演算処理が算出した方向データを、角度データとして記憶し、前記平均化処理は、前記記憶処理により記憶された方向データを、円周上の座標に変換する処理と、前記変換された座標に基づいて平均を求める処理と、前記平均された座標を角度データに変換する処理とを含む構成とすることができる(コンピュータプログラムの第3の構成)。 In the first configuration of the computer program, the storage process stores the direction data calculated by the direction calculation process as angle data, and the averaging process uses the direction data stored by the storage process as a circle. A process for converting the coordinates into circumference coordinates, a process for obtaining an average based on the converted coordinates, and a process for converting the averaged coordinates into angle data (first computer program) 3 configuration).
前記コンピュータプログラムの第1〜第3のいずれかの構成において、前記平均化処理により算出された平均化された方向データの変化に基づいて、回転動作を検出する回転検出処理をさらにコンピュータに実行させる構成とすることができる(コンピュータプログラムの第4の構成)。 In any one of the first to third configurations of the computer program, the computer further executes a rotation detection process for detecting a rotation operation based on a change in the averaged direction data calculated by the averaging process. It can be configured (fourth configuration of a computer program).
[実施の形態]
以下、図面を参照し、本発明の実施の形態を詳しく説明する。図中同一または相当部分には同一符号を付してその説明は繰り返さない。
[Embodiment]
Hereinafter, embodiments of the present invention will be described in detail with reference to the drawings. In the drawings, the same or corresponding parts are denoted by the same reference numerals and description thereof will not be repeated.
[第1の実施形態]
[全体の構成]
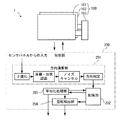
図1は、本発明の一実施形態にかかる検出装置1の構成を模式的に示すブロック図である。検出装置1は、センサパネル100と、制御部200とを備えている。
[First Embodiment]
[Overall configuration]
FIG. 1 is a block diagram schematically showing a configuration of a
センサパネル100は、センサ部101と、表示装置102と、駆動回路103とを備えている。なお、表示装置102は必須の構成要素ではない。すなわち、センサパネル100は、センサ部101と駆動回路103とを備えている構成であっても良い。
The
センサ部101は、例えば、タッチパネル、トラックパッド、またはデジタイザ等である。センサ部101の方式は、特に限定されない。センサ部101がタッチパネルの場合には、静電容量式、抵抗膜式、または光学式等を採用できる。一方、センサ部101は、センサ部101に接触または近接した物体を、二次元像として認識できる必要がある。そのため、静電容量式のタッチパネルであれば投影型が好ましく、抵抗膜式のタッチパネルであればマトリクス抵抗膜を備えたものが好ましい。また、センサ部101の分解能は高いほど好ましい。
The
表示装置102は、例えば液晶表示装置である。表示装置102が、センサ部101を兼ねる構成としても良い。例えば、表示装置102として、表示装置102の画素内に、フォトダイオード等が組み込まれたタッチパネル内蔵型表示装置を採用しても良い。
The
駆動回路103は、センサ部101および表示装置102と、FPC(Flexible Printed Circuit:フレキシブルプリント基板)等を介して接続されている。駆動回路103は、センサ部101および表示装置102を駆動する。
The
制御部200は、センサパネル100から信号を入力する。また、必要に応じて信号の一部をセンサパネル100にフィードバックする。制御部200は、入力されたセンサパネル100からの信号に含まれる二次元像のデータを解析し、物体がセンサ部101に接触または近接した位置、および物体の方向データを算出する。そして、算出した結果を外部に出力する。制御部200は、駆動回路103上にモジュールとして実装されていても良いし、センサパネル100とは別体の機器に実装されていても良い。また、制御部200の全てがハードウェアとして実装されていなくても良い。すなわち、制御部200の一部は、コンピュータプログラムをプロセッサが実行することによって実現される仮想的な機能ブロックであっても良い。
The
制御部200は、方向演算部201と、記憶部202と、平均化処理部203とを備える。
The
方向演算部201は、センサパネル100からの二次元像の信号を連続的にサンプリングする。そして、方向演算部201は、サンプリングした二次元像の信号を解析してセンサ部101に接触または近接した物体の方向を決定する。
The
方向演算部201は、まずセンサパネル100から入力した二次元像の信号を2値化する。2値化されたデータに基づいて、センサ部101上での物体の座標と、物体の形状とを算出する。
The
その後、ノイズキャンセル処理を行う。具体的には、あらかじめ定めた閾値以下の信号を除く処理や、一定範囲内の近接点を一つにまとめる処理等を行う。そして、ノイズキャンセルされた形状に基づいて、物体の方向を決定する。 Thereafter, noise cancellation processing is performed. Specifically, processing for removing signals that are equal to or lower than a predetermined threshold value, processing for combining adjacent points within a certain range, and the like are performed. Then, the direction of the object is determined based on the noise-cancelled shape.
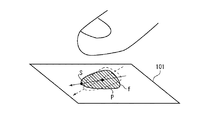
方向を決定する方法は任意であり、特に限定されない。方向を決定する方法の一例を、図2を用いて説明する。この例ではまず、センサ部101に近接した指の形状fの重心Pを求める。そして、形状fの輪郭上で、重心Pから最も距離の離れた点Sを求める。PとSを結ぶベクトルを、指の方向とする。
The method for determining the direction is arbitrary and is not particularly limited. An example of a method for determining the direction will be described with reference to FIG. In this example, first, the center of gravity P of the finger shape f adjacent to the
方向演算部201の算出結果は、記憶部202に出力される。記憶部202は、方向演算部201が出力する方向データを、連続的にサンプリングし、記憶する。
The calculation result of the
平均化処理部203は、記憶部202に格納された方向データに基づいて、方向データのブレを低減するための平均化処理を行う。具体的には例えば、記憶部202に格納された、直近および直近から複数回の方向データを用いて、平均を求める。
Based on the direction data stored in the
なお、この「平均化処理」とは、各データの総和をデータ点数で割った平均(相加平均)を求める処理のみを指すのではなく、各データに重みを付ける加重平均や、相乗平均、調和平均等を求める処理を含む。また、中央値や最頻値を求める処理を行っても良い。あるいは、中央値や最頻値から大きく外れた値を除去した後で平均を求める処理を行っても良い。 Note that this “averaging process” does not only refer to the process of calculating the average (arithmetic mean) of the sum of each data divided by the number of data points, but instead of the weighted average, Includes processing for obtaining harmonic averages and the like. Moreover, you may perform the process which calculates | requires a median and a mode value. Alternatively, an average may be obtained after removing a value greatly deviating from the median or mode.
平均化処理部203により平均化処理された方向データが、外部に出力される。また、平均化処理部203の出力は、必要に応じて、記憶部202にも出力される。
The direction data averaged by the averaging
制御部200は、回転検出部204をさらに備えていても良い。回転検出部204は、平均化処理部203から出力される方向データおよび記憶部202に格納された方向データに基づいて、方向データの変化を回転動作として検出する。そして、回転角度、角速度および加速度等のデータを外部に出力する。
The
以上、本発明の一実施形態にかかる検出装置1の全体構成について説明した。本実施形態によれば、記憶部に連続的にサンプリングされ記憶された値に基づいて平均化処理が行われる。この平均化処理により、センサ部101の感度が不十分な場合であっても、物体の方向を安定して求めることができる。
The overall configuration of the
[角度の平均化処理]
以下では、記憶部202に格納されている方向データが、0°≦θ<360°で表された角度データである場合を説明する。なお、角度の定義方法は任意である。例えば、−180°≦θ<180°で表される角度θが出力・格納されていても良い。あるいは、度数法の代わりに弧度法を用いて表された角度θが出力・格納されていても良い。
[Angle averaging]
Hereinafter, a case where the direction data stored in the
角度は値が循環する(360°で一周する)。このため、そのままでは平均をとることができない。例えば、1°と359°の平均値は180°である。一方、359°を‐1°と表現すれば、平均値は0°となる。 The angle circulates in value (turns around 360 °). For this reason, an average cannot be taken as it is. For example, the average value of 1 ° and 359 ° is 180 °. On the other hand, if 359 ° is expressed as −1 °, the average value is 0 °.
以下では、角度の平均化処理の一例を具体的に説明する。 Hereinafter, an example of the angle averaging process will be described in detail.
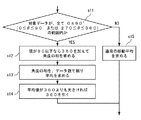
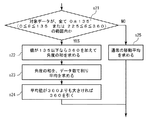
図3Aは、記憶部202に格納された直近および直近から複数回のデータを用いて平均(移動平均)を求める場合のフローチャートである。平均をとるデータの個数は任意である。
FIG. 3A is a flowchart in the case of obtaining an average (moving average) using the latest data stored in the
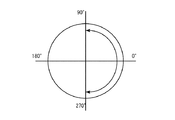
まず、ステップs11で、対象となる角度データの全てが、循環の起点となる0°から、一定の範囲内にあるかを調べる。具体的には角度データの全てが0°±90°の領域、すなわち、0°≦θ≦90°または270°≦θ≦360°の範囲内にあるかを調べる(図3Bを参照)。換言すれば、対象となる角度データの全てが、90°超270°未満の範囲にないことを調べる。そして、この条件を満たす場合には、ステップs12以降の特別な処理を行う。一方、この条件を満たさない場合には、ステップs15に進み、通常の移動平均を求める。 First, in step s11, it is checked whether all the target angle data are within a certain range from 0 ° as the starting point of circulation. Specifically, it is examined whether all the angle data is in the range of 0 ° ± 90 °, that is, in the range of 0 ° ≦ θ ≦ 90 ° or 270 ° ≦ θ ≦ 360 ° (see FIG. 3B). In other words, it is checked that all the target angle data are not in the range of more than 90 ° and less than 270 °. And when satisfy | filling this condition, the special process after step s12 is performed. On the other hand, if this condition is not satisfied, the process proceeds to step s15 to obtain a normal moving average.
上記の条件を満たす場合には、ステップs12において、90°以下の角度データに360°を加える。この操作により、0°≦θ≦90°および270°≦θ≦360°に存在していたデータが、270°≦θ≦450°の連続した範囲に存在するようになる。この操作をしてから、全ての角度について和を求める。 If the above condition is satisfied, 360 ° is added to the angle data of 90 ° or less in step s12. By this operation, the data that existed at 0 ° ≦ θ ≦ 90 ° and 270 ° ≦ θ ≦ 360 ° are present in a continuous range of 270 ° ≦ θ ≦ 450 °. After this operation, the sum is obtained for all angles.
そして、ステップ13で、角度の和をデータ数で割って平均を求める。ステップ14で、平均値が360°以上であれば360°を引き、値が0°≦θ<360°の範囲になるようにする。
In
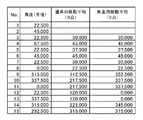
図4は、通常の平均と、本実施形態による角度の平均化処理とを、具体例で比較した表である。「角度(生値)」の欄には、方向演算部201が出力する角度データまたは記憶部202に格納されている角度データを示す。「通常の移動平均(3点)」の欄には、直近3点の角度データの平均値を示す。「角度用移動平均(3点)」の欄には、直近3点の角度データに基づいて、本実施形態による角度の平均化処理を行った値を示す。
FIG. 4 is a table comparing a normal average and an angle averaging process according to the present embodiment with specific examples. The “angle (raw value)” column shows the angle data output by the
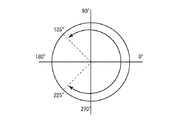
例えば、図4の表のNo.8,9,10の角度を単純に平均すると(0+315+337.5)/3=217.5という角度になる。一方、本実施形態による角度の平均化処理を行うと、((0+360)+315+337.5)/3=337.5という角度になる。図5から明らかなように、217.5よりも、337.5の方が、この3点の角度(0,315,337.5)をより良く代表する値となっている。 For example, in the table of FIG. If the angles of 8, 9, 10 are simply averaged, an angle of (0 + 315 + 337.5) /3=217.5 is obtained. On the other hand, when the angle averaging process according to the present embodiment is performed, an angle of ((0 + 360) + 315 + 337.5) /3=337.5 is obtained. As is apparent from FIG. 5, 337.5 is a value that better represents the angles (0, 315, 337.5) of these three points than 217.5.
本実施形態によれば、角度の平均化処理を行うことができる。 According to this embodiment, the angle averaging process can be performed.
[第2の実施形態]
本発明の第2の実施形態は、第1の実施形態と比べて、角度の平均化処理が異なる。
[Second Embodiment]
The second embodiment of the present invention differs from the first embodiment in the angle averaging process.
図6Aは、記憶部202に格納された直近および直近から複数回の角度データを用いて、移動平均を求める場合のフローチャートである。移動平均をとる角度データの個数は任意である。
FIG. 6A is a flowchart in the case where the moving average is obtained using the latest data stored in the
まず、ステップs21で、対象となる角度データの全てが、循環の起点となる0°から、一定の範囲内にあるかを調べる。本実施形態では、具体的には、対象となる角度データの全てが、0°±135°の領域、すなわち、0°≦θ≦135°または225°≦θ≦360°の範囲内にあるかを調べる(図6Bを参照)。換言すれば、対象となる角度データの全てが、135°超225°未満の範囲にないことを調べる。そして、この条件を満たす場合には、ステップs22以降の特別な処理を行う。一方、この条件を満たさない場合には、ステップs25に進み、通常の移動平均を求める。 First, in step s21, it is checked whether all the target angle data are within a certain range from 0 ° as the starting point of circulation. In the present embodiment, specifically, all the target angle data is in the range of 0 ° ± 135 °, that is, within the range of 0 ° ≦ θ ≦ 135 ° or 225 ° ≦ θ ≦ 360 °. (See FIG. 6B). In other words, it is checked that all the target angle data is not in the range of more than 135 ° and less than 225 °. And when satisfy | filling this condition, the special process after step s22 is performed. On the other hand, if this condition is not satisfied, the process proceeds to step s25 to obtain a normal moving average.
上記の条件を満たす場合には、ステップs22において、135°以下の角度データに360°を加える。この操作により、0°≦θ≦135°および225°≦θ≦360°に存在していた角度データが、225°≦θ≦495°の連続した範囲に存在するようになる。この操作をしてから、全ての角度について和を求める。 If the above condition is satisfied, 360 ° is added to the angle data of 135 ° or less in step s22. By this operation, the angle data that existed at 0 ° ≦ θ ≦ 135 ° and 225 ° ≦ θ ≦ 360 ° are now present in a continuous range of 225 ° ≦ θ ≦ 495 °. After this operation, the sum is obtained for all angles.
そして、ステップs23で、角度の和をデータ数で割って平均を求める。ステップs24で、平均値が360°以上であれば360°を引き、値が0°≦θ<360°の範囲になるようにする。 Then, in step s23, the average is obtained by dividing the sum of angles by the number of data. In step s24, if the average value is 360 ° or more, 360 ° is subtracted so that the value falls within the range of 0 ° ≦ θ <360 °.
本実施形態によっても、角度の平均化処理を行うことができる。また、本実施形態によれば、第1の実施形態と比較して、角度の揺らぎがより大きい場合でも平均化処理を行うことができる。 Also according to this embodiment, the angle averaging process can be performed. Further, according to the present embodiment, the averaging process can be performed even when the angle fluctuation is larger than in the first embodiment.
上記の第1または第2の実施形態では、平均化処理の対象となるデータが全て、0±90°または0±135°の領域にあるかを判定して分岐する例を説明した。平均化処理の対象となるデータの全てが、どのような範囲にある場合に特別な処理を行うかは、任意である。また、この範囲は、0°を中心に対称である必要もない。 In the first or second embodiment described above, an example has been described in which branching is performed by determining whether all data to be subjected to the averaging process are in the 0 ± 90 ° or 0 ± 135 ° region. In what range all the data to be subjected to the averaging process is, special processing is arbitrary. Also, this range need not be symmetrical about 0 °.
[第3の実施形態]
本発明の第3の実施形態は、第1の実施形態と比べて、角度の平均化処理が異なる。
[Third Embodiment]
The third embodiment of the present invention differs from the first embodiment in the angle averaging process.
図7Aは、記憶部202に格納された直近および直近から複数回の角度データを用いて、移動平均を求める場合のフローチャートである。移動平均をとるデータの個数は任意である。
FIG. 7A is a flowchart in the case where the moving average is obtained using the latest data stored in the
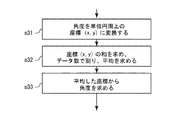
まず、ステップs31で、角度を単位円周上の座標(x,y)に変換する。次に、ステップs32で、変換された全ての座標(x,y)について、x座標およびy座標のそれぞれの和を求める。x座標の和およびy座標の和をそれぞれデータ数で割り、平均を求める(図7Bを参照)。そして、ステップs33で、平均した座標を再び角度に変換する。 First, in step s31, the angle is converted into coordinates (x, y) on the unit circumference. Next, in step s32, the sum of each of the x-coordinate and the y-coordinate is obtained for all the converted coordinates (x, y). The sum of the x coordinates and the sum of the y coordinates are each divided by the number of data to obtain an average (see FIG. 7B). In step s33, the averaged coordinates are converted again into angles.
図8は、本実施形態による角度の平均化処理の、具体例を示した表である。「角度(生値)」の欄には、記憶部202に格納されている角度データを示す。なお、「角度(生値)」の欄の数値は、図4のものと同じである。
FIG. 8 is a table showing a specific example of the angle averaging process according to the present embodiment. The “angle (raw value)” column shows angle data stored in the
「y座標」の欄には、角度データを単位円周上のy座標に変換した値を示す。「x座標」の欄には、角度データを単位円周上のx座標に変換した値を示す。「移動平均y座標(3点)」の欄には、直近3点のy座標を平均した値を示す。「移動平均x座標(3点)」の欄には、直近3点のx座標を平均した値を示す。「移動平均座標から生成した角度」の欄には、移動平均y座標および移動平均x座標から、再変換した角度を示す。 The “y-coordinate” column shows values obtained by converting angle data into y-coordinates on the unit circumference. The column of “x coordinate” indicates a value obtained by converting the angle data into the x coordinate on the unit circumference. The column “moving average y coordinate (3 points)” shows a value obtained by averaging the y coordinates of the three most recent points. The column of “moving average x coordinate (3 points)” shows a value obtained by averaging the x coordinates of the latest three points. The column “angle generated from moving average coordinates” shows an angle reconverted from the moving average y coordinate and moving average x coordinate.
例えば、図8の表のNo.8,9,10の角度データを単純に平均すると(0+315+337.5)/3=217.5という角度になる。本実施形態による角度の平均化処理を行う場合、まず、No.8の角度データ0°は、(x,y)=(cos(0),sin(0))=(1,0)という座標に変換される。同様に、No.9の角度データ315°は、(x,y)=(0.707,−0.707)という座標に変換される。No.10の角度データ337.5°は、(x,y)=(0.924,−0.383)という座標に変換される。次に、これらの平均のx座標(1+0.707+0.924)/3=0.877および平均のy座標(0+(−0.707)+(−0.383))/3=−0.363が計算される。この平均された座標を角度に再変換すると、337.5という角度になる。図5から明らかなように、217.5よりも、337.5の方が、この3点の角度(0,315,337.5)をより良く代表する値となっている。 For example, in the table of FIG. If the angle data of 8, 9, 10 are simply averaged, an angle of (0 + 315 + 337.5) /3=217.5 is obtained. In the case of performing the angle averaging process according to the present embodiment, first, No. 2 The angle data 0 ° of 8 is converted into coordinates of (x, y) = (cos (0), sin (0)) = (1, 0). Similarly, no. 9 angle data 315 ° is converted into coordinates of (x, y) = (0.707, −0.707). No. The angle data 337.5 ° of 10 is converted into coordinates (x, y) = (0.924, −0.383). Next, the average x coordinate (1 + 0.707 + 0.924) /3=0.877 and the average y coordinate (0 + (− 0.707) + (− 0.383)) / 3 = −0.363 Is calculated. When this averaged coordinate is converted back into an angle, an angle of 337.5 is obtained. As is apparent from FIG. 5, 337.5 is a value that better represents the angles (0, 315, 337.5) of these three points than 217.5.
本実施形態によっても、角度の平均化処理を行うことができる。 Also according to this embodiment, the angle averaging process can be performed.
[その他の実施形態]
以上、本発明についての実施形態を説明したが、本発明は上述の各実施形態のみに限定されず、発明の範囲内で種々の変更が可能である。また、上述した各実施形態は、適宜組み合わせて実施が可能である。
[Other Embodiments]
As mentioned above, although embodiment about this invention was described, this invention is not limited only to each above-mentioned embodiment, A various change is possible within the scope of the invention. Moreover, each embodiment mentioned above can be implemented in combination as appropriate.
本発明は、センサに接触または近接した指等の方向を検出する検出装置、検出方法および検出プログラムとして産業上の利用が可能である。 INDUSTRIAL APPLICABILITY The present invention can be industrially used as a detection device, a detection method, and a detection program for detecting the direction of a finger or the like that is in contact with or close to a sensor.
1 検出装置
100 センサパネル
101 センサ部
102 表示装置
103 駆動回路
200 制御部
201 方向演算部
202 記憶部
203 平均化処理部
204 回転検出部
DESCRIPTION OF
Claims (12)
前記センサ部に認識された二次元像から、前記物体の方向を表す方向データを出力する方向演算部と、
前記方向演算部が出力する方向データを連続的にサンプリングして記憶する記憶部と、
前記記憶部に記憶された方向データに基づいて平均化処理を行う平均化処理部とを備える検出装置。 A sensor unit capable of recognizing a two-dimensional image of an object in contact or close proximity;
A direction calculation unit that outputs direction data representing the direction of the object from the two-dimensional image recognized by the sensor unit;
A storage unit that continuously samples and stores the direction data output by the direction calculation unit;
A detection apparatus comprising: an averaging processing unit that performs an averaging process based on the direction data stored in the storage unit.
前記平均化処理部は、
Δθ0およびΔθ1をあらかじめ定めた数として、平均化処理の対象となる前記角度データの全てが、Δθ0超Δθ1未満でない場合には、Δθ0以下の角度データに360を加える処理と、平均を求める処理と、求められた平均がθ1以上のときにθ1を引く処理とを含む処理を行う、請求項1に記載の検出装置。 The storage unit stores the direction data output by the direction calculation unit as angle data that takes a value not less than θ 0 and less than θ 1 that satisfies the relationship θ 1 −θ 0 = 360,
The averaging processing unit
A process of adding 360 to angle data equal to or less than Δθ 0 when Δθ 0 and Δθ 1 are predetermined numbers and all of the angle data to be averaged are not greater than Δθ 0 and less than Δθ 1 . The detection apparatus according to claim 1, wherein a process including a process of obtaining an average and a process of subtracting θ 1 when the obtained average is equal to or greater than θ 1 is performed.
前記平均化処理部は、
前記記憶部に記憶された角度データを、円周上の座標に変換する処理と、
前記変換された座標に基づいて平均を求める処理と、
前記平均された座標を角度データに変換する処理とを含む処理を行う、請求項1に記載の検出装置。 The storage unit stores the direction data output by the direction calculation unit as angle data,
The averaging processing unit
A process of converting the angle data stored in the storage unit into coordinates on a circumference;
A process of obtaining an average based on the transformed coordinates;
The detection apparatus according to claim 1, wherein a process including a process of converting the averaged coordinates into angle data is performed.
前記方向演算処理の結果を連続的にサンプリングして記憶する記憶処理と、
前記記憶処理により記憶されたデータに基づいて行う平均化処理とを含む検出方法。 Direction calculation processing for outputting direction data representing the direction of an object in the data from the two-dimensional image data;
A storage process for continuously sampling and storing the result of the direction calculation process;
And an averaging process performed based on the data stored by the storage process.
前記平均化処理は、
Δθ0およびΔθ1をあらかじめ定めた数として、平均化処理の対象となる前記角度データの全てが、Δθ0超Δθ1未満でない場合には、Δθ0以下の角度データに360を加える処理と、平均を求める処理と、求められた平均がθ1以上のときにθ1を引く処理とを含む、請求項5に記載の検出方法。 The storage process stores the direction data calculated by the direction calculation process as angle data that takes a value not less than θ 0 and less than θ 1 that satisfies the relationship θ 1 −θ 0 = 360;
The averaging process is:
A process of adding 360 to angle data equal to or less than Δθ 0 when Δθ 0 and Δθ 1 are predetermined numbers and all of the angle data to be averaged are not greater than Δθ 0 and less than Δθ 1 . The detection method according to claim 5, comprising: a process for obtaining an average; and a process for subtracting θ 1 when the obtained average is equal to or greater than θ 1 .
前記平均化処理は、
前記記憶処理により記憶された方向データを、円周上の座標に変換する処理と、
前記変換された座標に基づいて平均を求める処理と、
前記平均された座標を角度データに変換する処理とを含む、請求項5に記載の検出方法。 The storage process stores the direction data calculated by the direction calculation process as angle data,
The averaging process is:
Processing for converting the direction data stored by the storage processing into coordinates on the circumference;
A process of obtaining an average based on the transformed coordinates;
The detection method according to claim 5, further comprising: converting the averaged coordinates into angle data.
前記方向演算処理の結果を連続的にサンプリングして記憶する記憶処理と、
前記記憶処理により記憶されたデータに基づいて行う平均化処理とをコンピュータに実行させるコンピュータプログラム。 Direction calculation processing for outputting direction data representing the direction of an object in the data from the two-dimensional image data;
A storage process for continuously sampling and storing the result of the direction calculation process;
The computer program which makes a computer perform the averaging process performed based on the data memorize | stored by the said memory | storage process.
前記平均化処理は、
Δθ0およびΔθ1をあらかじめ定めた数として、平均化処理の対象となる前記角度データの全てが、Δθ0超Δθ1未満でない場合には、Δθ0以下の角度データに360を加える処理と、平均を求める処理と、求められた平均がθ1以上のときにθ1を引く処理とを含む、請求項9に記載のコンピュータプログラム。 The storage process stores the direction data calculated by the direction calculation process as angle data that takes a value not less than θ 0 and less than θ 1 that satisfies the relationship θ 1 −θ 0 = 360;
The averaging process is:
A process of adding 360 to angle data equal to or less than Δθ 0 when Δθ 0 and Δθ 1 are predetermined numbers and all of the angle data to be averaged are not greater than Δθ 0 and less than Δθ 1 . The computer program according to claim 9, comprising: a process for obtaining an average; and a process for subtracting θ 1 when the obtained average is equal to or greater than θ 1 .
前記平均化処理は、
前記記憶処理により記憶された方向データを、円周上の座標に変換する処理と、
前記変換された座標に基づいて平均を求める処理と、
前記平均された座標を角度データに変換する処理とを含む、請求項9に記載のコンピュータプログラム。 The storage process stores the direction data calculated by the direction calculation process as angle data,
The averaging process is:
Processing for converting the direction data stored by the storage processing into coordinates on the circumference;
A process of obtaining an average based on the transformed coordinates;
The computer program according to claim 9, further comprising: converting the averaged coordinates into angle data.
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011185694A JP2014211661A (en) | 2011-08-29 | 2011-08-29 | Detection device, detection method, and detection program |
| PCT/JP2012/071376 WO2013031661A1 (en) | 2011-08-29 | 2012-08-24 | Detection apparatus, detection method, and detection program |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2011185694A JP2014211661A (en) | 2011-08-29 | 2011-08-29 | Detection device, detection method, and detection program |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| JP2014211661A true JP2014211661A (en) | 2014-11-13 |
Family
ID=47756151
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| JP2011185694A Withdrawn JP2014211661A (en) | 2011-08-29 | 2011-08-29 | Detection device, detection method, and detection program |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP2014211661A (en) |
| WO (1) | WO2013031661A1 (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020004046A (en) * | 2018-06-27 | 2020-01-09 | 株式会社Soken | Operation apparatus |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2008137708A1 (en) * | 2007-05-04 | 2008-11-13 | Gesturetek, Inc. | Camera-based user input for compact devices |
| JP4979600B2 (en) * | 2007-09-05 | 2012-07-18 | パナソニック株式会社 | Portable terminal device and display control method |
-
2011
- 2011-08-29 JP JP2011185694A patent/JP2014211661A/en not_active Withdrawn
-
2012
- 2012-08-24 WO PCT/JP2012/071376 patent/WO2013031661A1/en active Application Filing
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020004046A (en) * | 2018-06-27 | 2020-01-09 | 株式会社Soken | Operation apparatus |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2013031661A1 (en) | 2013-03-07 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10558273B2 (en) | Electronic device and method for controlling the electronic device | |
| US8692802B1 (en) | Method and apparatus for calculating coordinates with high noise immunity in touch applications | |
| US8743065B2 (en) | Method of identifying a multi-touch rotation gesture and device using the same | |
| US20190310755A1 (en) | Coordinate correction apparatus | |
| US8937608B2 (en) | Touch panel system, electronic information device, and method for detecting indicator position | |
| JP5812015B2 (en) | Input device, input method, and program | |
| CN105144050B (en) | Gesture touches the ID trackings of geometric position | |
| US20150260750A1 (en) | Electronic apparatus and program | |
| TW201234226A (en) | Signal processing method for touch panel and system thereof | |
| TW201715362A (en) | System and method for predicting trajectory | |
| CN102859473B (en) | Point to location determining device and method, touch panel device, electronic equipment | |
| US9110588B2 (en) | Optical touch device and method for detecting touch point | |
| WO2013031661A1 (en) | Detection apparatus, detection method, and detection program | |
| JP5814704B2 (en) | Touch panel controller, touch panel control method, input device using the same, and electronic device | |
| WO2019016875A1 (en) | Touch operation determination device and method for determining validity of touch operation | |
| JP2023066075A (en) | Detection apparatus | |
| JP5898447B2 (en) | Touch-type input device, its controller, and electronic device | |
| JP7094631B2 (en) | Input device | |
| US10558270B2 (en) | Method for determining non-contact gesture and device for the same | |
| JP2015176467A (en) | Touch panel display and control method therefor | |
| US20180210607A1 (en) | Multiple threshold motion tolerance to filter coordinate jitter in touch sensing | |
| JPWO2015008705A1 (en) | Touch panel system and electronic information device | |
| JP2004287473A (en) | Information processor and program | |
| US20240069497A1 (en) | Electronic device, form determination method, and recording medium | |
| TWI421755B (en) | Touch panel and touching point detection method thereof |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| A300 | Application deemed to be withdrawn because no request for examination was validly filed |
Free format text: JAPANESE INTERMEDIATE CODE: A300 Effective date: 20141104 |