WO2025009023A1 - 通信装置 - Google Patents
通信装置 Download PDFInfo
- Publication number
- WO2025009023A1 WO2025009023A1 PCT/JP2023/024645 JP2023024645W WO2025009023A1 WO 2025009023 A1 WO2025009023 A1 WO 2025009023A1 JP 2023024645 W JP2023024645 W JP 2023024645W WO 2025009023 A1 WO2025009023 A1 WO 2025009023A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- communication
- network
- ncap
- ncap100
- information
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images












Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W24/00—Supervisory, monitoring or testing arrangements
- H04W24/04—Arrangements for maintaining operational condition
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W36/00—Hand-off or reselection arrangements
- H04W36/08—Reselecting an access point
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04W—WIRELESS COMMUNICATION NETWORKS
- H04W84/00—Network topologies
Definitions
- the present disclosure relates to a communication device capable of performing wireless communication with a terminal (User Equipment, UE).
- a terminal User Equipment, UE
- the 3rd Generation Partnership Project (3GPP: registered trademark) is defining specifications for the 5th generation mobile communication system (5G, also known as New Radio (NR) or Next Generation (NG)) and is also developing specifications for the next generation, known as Beyond 5G, 5G Evolution or 6G.
- 5G also known as New Radio (NR) or Next Generation (NG)
- NG Next Generation
- Non-Patent Document 1 discusses more flexible network function placement and other aspects of the network architecture.
- NCAP Network Controlled Access Points
- the NCAP and the network operator (specifically, the radio base station (gNB)) will be connected wirelessly via the radio access network (RAN). Therefore, it is conceivable that the NCAP will be installed in vehicles, aircraft, ships, etc., and the NCAP may move along with the movement of the vehicle.
- the entire network must operate in a way that takes the movement of the NCAP into account.
- information must be exchanged between the UE and the network operator, taking the movement of the NCAP into account.
- the following disclosure has been made in light of these circumstances, and aims to provide a communications device that can operate appropriately and exchange information even when the communications device is moving.
- One aspect of the present disclosure is a communication device (NCAP100) that connects to a first communication network, a second communication network, and a terminal, and includes a communication unit (first communication unit 110, second communication unit 120, and third communication unit 130) that performs wireless communication with the first communication network via a wireless access network, wireless communication or wired communication with the second communication network, and wireless communication with the terminal, and a control unit (control unit 140) that, when the communication device moves, performs at least one of an operation related to the movement of the communication device and transmission and reception of information related to the movement by the communication unit.
- NCAP100 network that connects to a first communication network, a second communication network, and a terminal
- a communication unit first communication unit 110, second communication unit 120, and third communication unit 130
- control unit 140 that, when the communication device moves, performs at least one of an operation related to the movement of the communication device and transmission and reception of information related to the movement by the communication unit.
- FIG. 1 is a schematic diagram showing the overall configuration of a wireless communication system 10.
- FIG. 2 is a functional block diagram of the NCAP 100.
- FIG. 3 is a functional block diagram of UE 200.
- FIG. 4 is a diagram showing an example (part 1) of the arrangement of the C-plane functions and U-plane functions of a CN in a mobile communication network configured using NCAP100.
- FIG. 5 is a diagram showing an example (part 2) of the arrangement of the C-plane functions and U-plane functions of a CN in a mobile communication network configured using NCAP100.
- FIG. 6 is a diagram showing an example of a network configuration in which the NCAP 100 moves.
- FIG. 7 is a diagram showing an example in which the NCAP 100 moves between cells.
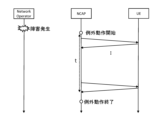
- FIG. 8 is a diagram showing an example sequence between a network operator/SON mechanism, NCAP and a UE according to an example operation.
- FIG. 9 is a diagram showing a sequence example (part 1) regarding the start of an exceptional operation by the NCAP 100.
- FIG. 10 is a diagram showing a sequence example (part 2) regarding the start of an exceptional operation by the NCAP 100.
- FIG. 11 is a diagram showing a sequence example (part 1) regarding the end of an exceptional operation by the NCAP 100.
- FIG. 12 is a diagram showing a sequence example (part 2) regarding the end of an exceptional operation by the NCAP 100.
- FIG. 13 is a diagram showing a sequence example (part 3) regarding the end of an exceptional operation by the NCAP 100.
- FIG. 14 is a diagram illustrating an example of the hardware configuration of the NCAP 100 and the UE 200.
- FIG. 15 is a diagram showing an example of the configuration of a vehicle 2001.
- FIG. 1 is an overall schematic configuration diagram of a wireless communication system 10 according to this embodiment.
- the wireless communication system 10 is a wireless communication system conforming to a method called Beyond 5G, 5G Evolution, or 6G (hereinafter referred to as 6G), and includes a wireless base station 50 (hereinafter referred to as gNB50) and a terminal 200 (hereinafter referred to as UE200, User Equipment, UE).
- gNB50 wireless base station 50
- UE200 User Equipment
- the wireless communication system 10 may be a wireless communication system conforming to a specification other than 6G, such as 5G New Radio (NR).
- NR 5G New Radio
- the gNB50 is a 6G-compliant radio base station, and performs 6G-compliant radio communication with the UE200.
- the gNB50 and UE200 are capable of supporting Massive MIMO (Multiple-Input Multiple-Output), which generates more directional antenna beams by controlling radio signals transmitted from multiple antenna elements, Carrier Aggregation (CA), which uses multiple component carriers (CC) by bundling them together, and Dual Connectivity (DC), which enables simultaneous communication between the UE and two or more RAN Nodes.
- Massive MIMO Multiple-Input Multiple-Output
- CA Carrier Aggregation
- CC component carriers
- DC Dual Connectivity
- the wireless communication system 10 includes a Network Controlled Access Point 100 (hereinafter, NCAP 100).
- the NCAP 100 is a type of communication device called an access point (AP) and can provide functions similar to those of a wireless base station.
- AP access point
- NCAP is a tentative name and may be called a communication node, a RAN node, a relay device, or another similar name.
- the NCAP may be called a femto base station, a femto cell, or in particular an enhanced femto.
- the NCAP 100 may be installed by the operator of the wireless communication system 10 (mobile communication system) (which may be called a network operator or a mobile operator, etc.), but may also be freely installed by a subscriber (customer, subscriber) of the communication service provided by the wireless communication system 10.
- mobile communication system which may be called a network operator or a mobile operator, etc.
- subscriber customer, subscriber
- At least one of the frequency bands (which may include band combinations), the number of antenna beams, the number of MIMO layers, and the transmission power supported by NCAP100 may be more limited than gNB50.
- NCAP100 can provide functions roughly similar to those of gNB50, and therefore can form cell C1 and accommodate UE200.
- UE200 is typically a mobile terminal such as a smartphone, but may also be a device for the Industrial Internet of Things (IIoT) or URLLC (Ultra-Reliable and Low Latency Communications).
- IIoT Industrial Internet of Things
- URLLC Ultra-Reliable and Low Latency Communications
- the wireless communication system 10 may be configured with a radio access network (RAN) that is configured with multiple RAN nodes such as gNB50 using a 6G radio access technology (RAT), and a core network that complies with 6G.
- RAN radio access network
- RAT 6G radio access technology
- the RAN and the core network may be simply referred to as a "network.”
- the core network may be connected to the RAN and is a network composed of switches, subscriber information management devices, etc.
- the UE 200 can communicate with the core network via the RAN.
- C-plane control plane
- U-plane user plane
- C-plane may refer to a series of control processes exchanged primarily to establish communications, etc.
- U-plane may refer to the sending and receiving processes of user data.
- CUPS Control and User Plane Separation
- the C-plane function of the core network may include an Access and Mobility Management Function (AMF) that provides access and mobility management functions for UE200, and a Session Management Function (SMF) that provides session management functions.
- AMF Access and Mobility Management Function
- SMF Session Management Function
- AMF and SMF may be called by different names.
- the network operator may connect to the RAN and perform various controls on the NCAP100 via the C-plane function. At least a part of such connection and/or control may be realized using the Self-Organizing Networks (SON) framework.
- the SON mechanism may be interpreted as providing a self-optimization function for the mobile communication network, including automatic configuration at the time of gNB50 installation and automatic optimization of parameters.
- NCAP100 can connect to gNB50 via the C-plane function.
- the connection between gNB50 and NCAP100 may be via RAN (RAT) or via a wired network.
- NCAP100 can also provide UE200 with a communication path to broadband Internet and servers for MEC (Multiaccess Edge Computing) via a local area network (LAN).
- MEC Multiaccess Edge Computing
- LAN local area network
- MEC is a mechanism for deploying servers and storage closer to users (subscribers) in a mobile communications network. It may also be possible to access various cloud services via broadband Internet.
- NCAP100 may operate while being fixed at a specific position, but in this embodiment, it may be assumed that it moves. In other words, NCAP100 may be stationary, or may be moving in a specific direction (which may include altitude) without being stationary.
- the NCAP 100 may be installed in a vehicle such as a car, an aircraft or a ship.
- the speed and altitude of movement of the NCAP 100 may vary depending on the characteristics of the vehicle in which the NCAP 100 is installed.
- a functional block configuration of the wireless communication system 10 will be described. Specifically, the functional block configurations of the NCAP 100 and the UE 200 will be described.
- Fig. 2 is a functional block configuration diagram of the NCAP 100.
- Fig. 3 is a functional block configuration diagram of the UE 200.
- the NCAP 100 includes a first communication unit 110, a second communication unit 120, a third communication unit 130, and a control unit 140.
- the first communication unit 110 performs communication with the network operator side. Specifically, the first communication unit 110 performs communication with RAN nodes including gNB50.
- a radio access technology (RAT) may be used to connect to gNB50 (and other RAN nodes), or a wired network other than the RAT may be used.
- RAT radio access technology
- NCAP100 since it is assumed that NCAP100 will move, it may be connected to gNB50 via RAN.
- the gNB50 (and other RAN nodes) may be connected wirelessly in this way, but the form of the wireless communication network (mobile communication network) may be a terrestrial network (TN: Terrestrial Network) or a non-terrestrial network (NTN: Non-Terrestrial Network).
- TN Terrestrial Network
- NTN Non-Terrestrial Network
- the network on the network operator side which is composed of RAN nodes including gNB50, may be called the first communication network.
- the first communication unit 110 performs communication with the first communication network using a RAT.
- the network on the network operator side may be interpreted as a concept including SON.
- the second communication unit 120 communicates with the local area network (LAN). Specifically, the second communication unit 120 communicates via communication devices such as routers that make up the LAN, and via broadband Internet (which may be simply abbreviated as Internet).
- LAN local area network
- the second communication unit 120 communicates via communication devices such as routers that make up the LAN, and via broadband Internet (which may be simply abbreviated as Internet).
- a wireless LAN such as Wi-Fi (registered trademark) may be used to connect to the LAN.
- a wired LAN such as Ethernet (registered trademark) may also be used.
- the network on the LAN side may be called the second communication network.
- the second communication unit 120 executes communication with the second communication network using LAN technology.
- the second communication unit 120 may also communicate with a network operator via a LAN (second communication network) and broadband Internet.
- the communication may include communication related to not only U-plane functions but also C-plane functions.
- the third communication unit 130 performs communication with the UE 200. Specifically, the third communication unit 130 performs wireless communication with the UE 200 using a radio access technology (RAT). In this case, the NCAP 100 may provide the UE 200 with a function similar to that of the gNB 50.
- RAT radio access technology
- NCAP100 can be connected to a network operator's network (first communication network), a local area network (second communication network), and UE200.
- first communication network a network operator's network
- second communication network a local area network
- third communication unit 130 may constitute a communication unit that performs wireless communication with the first communication network via a wireless access network, wireless communication or wired communication with the second communication network, and wireless communication with a terminal.
- the control unit 140 controls each functional block that constitutes the NCAP 100.
- the control unit 140 can control the behavior of the communication device of the NCAP 100.
- the control unit 140 can execute operations (hereinafter, specific operations) in which the NCAP 100 acts as a network device (NW device) that accommodates the UE 200.
- NW device network device
- the network device is not limited to a particular type of device, so long as it is a device that accommodates UE200 (intended to connect to UE200 and perform wireless communication).
- a network device such as a wireless base station (gNB50) may be intended, and the control unit 140 may perform a specific operation as a wireless base station that accommodates UE200.
- gNB50 wireless base station
- the control unit 140 can also execute control regarding the movement of the NCAP 100.
- the NCAP 100 may operate as a NW device that accommodates the UE 200, and may move during this operation. As described above, the NCAP 100 may be installed in a vehicle or the like, and may move together with the vehicle as it moves.
- movement here may not only refer to the movement of NCAP100 itself, but also to the movement of the network side, such as gNB50, causing NCAP100 to move relatively.
- Examples of elements that move on the network side include the use of satellites or high-altitude platform stations (HAPS) that make up the NTN, and the use of mobile Integrated Access and Backhaul (mobile IAB) that integrates wireless access to UE and wireless backhaul between wireless access nodes such as gNBs.
- HAPS high-altitude platform stations
- mobile IAB mobile Integrated Access and Backhaul
- GEO Geostationary Orbit satellites
- LEO Low Earth Orbit satellites
- control unit 140 may control operations related to the movement of the NCAP 100.
- the control unit 140 may also control the transmission and reception of information related to the movement of the NCAP 100 by a communication unit (at least one of the first communication unit 110, the second communication unit 120, and the third communication unit 130).
- control unit 140 may control the transmission and reception of information related to the movement of at least one of NCAP100 and UE200 to and from the network side before or during operation as NCAP100.
- Operation as NCAP100 may mean operation as a NW device that accommodates UE200.
- Before operation as NCAP100 may be interpreted as before NCAP100 obtains permission (instruction) for the operation from the network side, or before the settings required for NCAP100 to operate as a NW device that accommodates UE200 are completed.
- the information related to movement may be targeted at NCAP100 (or the vehicle in which NCAP100 is installed) or UE200, and may include information that can identify the speed and speed of movement (which may include the amount of change, such as the distance traveled per unit time), the direction of movement (latitude, longitude, direction, altitude), trajectory, etc. It may also include information indicating a change from the content already sent (reported) to the network, and may include the channel state (including cases where it has changed).
- Control channels include control channels and data channels.
- Control channels include PDCCH (Physical Downlink Control Channel), PUCCH (Physical Uplink Control Channel), PRACH (Physical Random Access Channel), and PBCH (Physical Broadcast Channel), etc.
- Data channels also include PDSCH (Physical Downlink Shared Channel) and PUSCH (Physical Uplink Shared Channel).
- PDSCH Physical Downlink Shared Channel
- PUSCH Physical Uplink Shared Channel
- the information related to movement may include restrictions on the movement of NCAP100 when NCAP100 operates as a network device accommodating UE200 (e.g., upper or lower speed limit, movement range/direction, trajectory), and may also include information related to handover (HO) (e.g., HO settings/instructions, conditions, restrictions on HO destination).
- restrictions on the movement of NCAP100 when NCAP100 operates as a network device accommodating UE200 e.g., upper or lower speed limit, movement range/direction, trajectory
- HO handover
- the information related to the movement of the UE 200 may be shown relatively in relation to the information related to the movement of the NCAP 100 (e.g., relative speed), or may be shown as an absolute value. Alternatively, it may simply be information indicating whether the UE 200 moves together with the NCAP 100.
- the control unit 140 may control operations related to handover (HO) of NCAP100 or transmission and reception of information related to the handover with the UE200.
- Information related to handover may include the start and end timing of HO between gNB50 and NCAP100, the time (section) during which operation as a NW device is stopped during HO, the HO destination, and completion of HO execution.
- Information related to the handover may also include parameters (including parameter sets) used for wireless communication between NCAP100 and UE200 after completion of HO between gNB50 and NCAP100.
- the control unit 140 may control operations related to session disconnection with the network side while operating as NCAP 100, or the transmission and reception of information related to session disconnection with UE 200.
- the actions related to session disconnection may be interpreted as actions that are applied when a session (which may be interpreted as a synonymous term such as a connection or a path) between NCAP100 and a node (function) constituting the core network becomes unavailable.
- Such actions may include NCAP100 ceasing, stopping, or postponing wireless communication (transmission and/or reception operations) with UE200.
- Information related to session disconnection may be interpreted as information notified to UE 200 when a session becomes unavailable or when a session is resumed.
- the information may include information such as the occurrence of session disconnection, the recovery of a session, and the execution of radio link recovery.
- the control unit 140 may notify the network side (specifically, the network operator/SON mechanism) of the information.
- the control unit 140 may control transmission and reception of operations related to the end of operation as the NCAP 100 or information related to the end of operation with the UE 200.
- An operation related to the termination of an operation may be interpreted as an operation that is applied when NCAP100 terminates its operation as a network device that accommodates UE200.
- the operation may include the termination of wireless communication (transmission and/or reception operations) between NCAP100 and UE200.
- Information related to the termination of operation may be interpreted as information that is notified to UE200 when NCAP100 terminates its operation as a network device accommodating UE200.
- the information may include information such as that NCAP100 will terminate its operation as a network device accommodating UE200, and settings for a new NCAP to which UE200 should connect upon the termination of operation.
- control unit 140 may execute a specific exceptional operation based on instructions from the network side.
- a specific exceptional operation may be interpreted as an exceptional operation while NCAP100 is operating as a NW device that accommodates UE200, and is an operation that is mainly intended as a countermeasure for failures on the network side.
- control unit 140 may execute the exceptional operation in response to permission/instruction from the network side.
- the exceptional operation may mean executing a specified operation (the specific operation content will be described later) during the operable period and/or while the NCAP 100 is present in a location (area) previously set/notified by the network side.
- the control unit 140 may execute the exceptional operation when permission/instruction to execute the exceptional operation is notified from the network side as a response to communication from the NCAP 100 or UE 200 to the network side. Alternatively, the control unit 140 may execute the exceptional operation when permission/instruction to execute the exceptional operation is notified from the network side during the operation execution phase as a NW device that accommodates the UE 200.
- the control unit 140 may execute the exception operation if there is no response to communication from the NCAP 100 or the UE 200 to the network operator (first communication network).
- the control unit 140 can also perform specific operations in at least one of the C-plane of the NCAP 100 or UE 200 related to the CN, and the U-plane of the UE 200 related to the CN.
- the C-plane function and U-plane function of the CN may include the following processing.
- ⁇ C-plane functions Device (equipment) registration/connection, subscriber management/retention/processing, subscriber (terminal) authentication processing, billing-related control, mobility management, session management ⁇ U-plane: Connection to IP (Internet Protocol) network, authentication processing, IP packet routing, priority control
- the UE 200 includes a wireless communication unit 210 , a connection IF unit 220 , and a control unit 230 .
- the wireless communication unit 210 transmits and receives wireless signals conforming to 6G with gNB50 or NCAP100. Specifically, the wireless communication unit 210 transmits UL signals conforming to 6G and receives DL signals conforming to 6G.
- the wireless communication unit 210 supports Massive MIMO, CA that uses a bundle of multiple CCs, and DC that simultaneously communicates between the UE and each of two NG-RAN nodes.
- connection IF unit 220 can provide an interface (IF) function for connecting devices for IIoT or URLLC.
- the connection IF unit 220 is not essential, and may not be provided depending on the specifications of the UE 200.
- the IF provided by the connection IF unit 220 may be wired or wireless.
- the control unit 230 controls the wireless communication unit 210 and the connection IF unit 220.
- the control unit 230 may execute control related to the connection with the NCAP 100.
- the control unit 230 can execute the connection with the NCAP 100 and the handover (HO) to another NCAP.
- control unit 230 may perform handover to a gNB that is connected to the same NCAP as the UE 200 is connected to.
- the control unit 230 may also execute control to suspend, stop, or postpone wireless communication (transmission and/or reception operations) with the NCAP 100, either autonomously or based on a notification from the NCAP 100.
- the control unit 230 may continue the wireless communication until a specified timing, or may execute the transmission and reception operations for scheduled data.
- FIG. 4 shows an example (part 1) of the arrangement of the C-plane functions and U-plane functions of a CN in a mobile communication network configured using NCAP100.
- NCAP100 when NCAP100 connects to a network operator, communication with the network operator's network may be performed via RAN (using a RAT). Specifically, exchange of information regarding the execution of a connection between NCAP100 and the network operator's network (e.g., gNB50 or AMF/SMF constituting a core network) may be performed by wireless communication with gNB50, or NCAP100 may perform a connection operation as a UE.
- the network operator's network e.g., gNB50 or AMF/SMF constituting a core network
- FIG. 5 shows an example (part 2) of the arrangement of the C-plane function and the U-plane function of the CN in a mobile communication network configured using the NCAP100. Specifically, when the NCAP100 connects to a network operator, communication with the network on the network operator side may be performed via broadband Internet.
- the CN's C-plane function (Function 1 in the figure) may be placed within the network operator's network, and the CN's U-plane function (Function I in the figure) may be placed within NCAP100.
- Fig. 6 shows an example of a network configuration in the case where the NCAP 100 moves.
- the NCAP 100 may be installed in a vehicle such as a car, an aircraft, or a ship.
- NCAP100 moves like this are anticipated. Note that this is not necessarily limited to cases in which NCAP100 is installed in a vehicle and forms a LAN within the vehicle, but may also include cases in which NCAP100 is mounted on a movable object or where NCAP100 itself moves.
- the wireless connection between the gNB50 and the NCAP100 may be via TN or NTN, and the TN/NTN itself may or may not be compliant with 3GPP technical standards.
- NCAP100 moves
- the entire network must operate in a way that takes into account the movement of NCAP100.
- information exchange with UE200 and the network operator that takes into account the movement of NCAP100 is required. Below, we will explain an example of operation that meets these requirements.
- FIG. 7 shows an example of the NCAP 100 moving between cells.
- Fig. 8 shows an example of a sequence between a network operator/SON mechanism, the NCAP and the UE according to an operation example.
- NCAP100 may move while operating as a NW device accommodating UE200, and may perform operations related to said movement.
- This allows a mobile communication network including NCAP100 (NCAP network) to be applied to a greater number of use cases.
- NCAP100 NCAP network
- this may include operations related to the movement of NCAP100 and sending and receiving information related to the movement, such as:
- the information in the above-mentioned operation example may be reported from NCAP to the gNB/network operator/SON mechanism as an MDT (Minimization of drive test) report.
- the type of MDT may be Immediate MDT or a logged MDT report. Immediate MDT may be interpreted as an MDT performed by NCAP in a connected state, and logged MDT may be interpreted as an MDT performed by NCAP in an idle state in the radio resource control layer (RRC).
- RRC radio resource control layer
- the gNB may transmit the information to a TCE (Trace Collection Server)/SON mechanism.
- TCE Transmission Collection Server
- the report destination may be interpreted as a gNB (radio base station).
- NCAP 100 may report information to and receive information from a network operator/SON mechanism prior to obtaining permission to operate as an NCAP from the network.
- NCAP100 may report the following information to the network operator/SON organization:
- Information related to the movement of the NCAP For example, the speed, speed (including the amount of change), direction of movement, and trajectory (track) of the NCAP (or vehicle).
- NCAP Information on the movement of UE that can be accommodated in NCAP For example, the relative speed (or speed difference) based on the speed of the NCAP, the absolute speed, whether or not it moves together with the NCAP, etc.
- Network types applicable to communication between NCAP and network operators/SON organizations. For example, wired networks, wireless networks, 3GPP technical standard compliant/non-compliant, TN/NTN, licensed spectrum/unlicensed spectrum, etc.
- NCAP100 may also receive information from the network operator/SON mechanism, such as:
- the NCAP may suspend or stop its operation as a network device.
- the NCAP may also report to the network operator/SON mechanism that the constraints are not met.
- HO Handover
- HO destination restrictions e.g., frequency, frequency range, band combination, cell ID, etc.
- Settings/instructions regarding switching of network types, switching conditions, and restrictions on switching destinations e.g., limited to some of the network types mentioned above
- Various parameters related to the operation as a NW device corresponding to the location/movement status of the NCAP when the NCAP operates as the NW device For example, parameter set A may be used at location (or area) A of the NCAP, and parameter set B may be used at location (area) B.
- NCAP100 can report the relevant information to the network operator/SON mechanism before obtaining permission to operate as NCAP from the network, and can receive the relevant information from the network operator/SON mechanism. This allows the entire network to quickly prepare for corresponding operations in advance, even if NCAP100 moves.
- NCAP 100 may report information or send triggers to and receive information from a network operator/SON mechanism while operating as an NCAP.
- NCAP100 may report the following information to the network operator/SON mechanism:
- NCAP position For example, NCAP position, speed, velocity, direction of movement, trajectory, etc.
- Channel conditions (which may include conditions that have changed) For example, the received power, reception quality and interference measurements of the channel may be included.
- ⁇ Communication quality between NCAP and network operator/SON mechanism may include changes in quality
- NCAP Information about gNBs/cells that NCAP can HO (may include changes in content)
- NCAP - Network types applicable to network operator/SON organization communications may include changes in content
- Information before/during/after HO For example, the NCAP connection destination before HO, the NCAP connection destination after HO
- the above information may be reported periodically, or when the information changes or when the amount of change in the information exceeds a certain threshold.
- the NCAP 100 may report the information according to an explicit or implicit trigger from the NCAP to the network operator/SON mechanism.
- NCAP100 may also receive the following information from the network operator/SON mechanism:
- the UE's HO method when going via NTN may be applied to the NCAP's HO.
- the NCAP may receive instructions related to after HO before or during HO.
- At least one of the suspension start timing, suspension end timing, suspension period, and operation resumption condition (e.g., the location of the NCAP) may be notified.
- the NCAP may suspend or resume the operation according to the notification, and may notify the UE that accommodates it that the operation has been suspended or resumed.
- NCAP100 can report information or send triggers to the network operator/SON mechanism while operating as an NCAP, and can receive information from the network operator/SON mechanism, so that even if NCAP100 is moving, the network as a whole can operate according to the movement situation.
- NCAP 100 when NCAP 100 performs handover (HO) while operating as an NCAP, NCAP 100 may perform corresponding operations between NCAP and UE.
- HO handover
- NCAP 100 may perform corresponding operations between NCAP and UE.
- NCAP100 may notify UE200 of the following information related to HO between NCAP and gNB:
- the NCAP 100 may cancel, stop, or postpone communication (transmission operation and/or reception operation) with the UE 200. Note that the NCAP 100 may perform a transmission or reception operation for scheduled communication (data), or may continue communication with the UE 200 regardless of HO.
- NCAP100 may notify UE200 to halt, stop or postpone communication (transmission and/or reception operations).
- UE200 may cancel, stop or postpone communication (transmission and/or reception) with NCAP100.
- UE200 may perform transmission or reception operations for scheduled communications (data) and may continue communication with NCAP100 regardless of HO.
- UE200 when UE200 is connected to gNB50, it may perform handover to a gNB that is connected to the same NCAP as the UE200 is connected to.
- NCAP100 may notify UE200 of parameters/parameter sets to be used for communication between NCAP and UE after HO between NCAP and gNB.
- the parameters may be notified before or during HO, or after HO.
- the parameters used before the HO may continue to be used until the HO is completed or a notification of the completion of the HO is received. Also, new parameters may be used after the HO is completed or a notification of the completion of the HO is received.
- the above-mentioned information relating to this operation example may be reported from NCAP100 to the network operator/SON mechanism.
- NCAP100 when NCAP100 performs HO while operating as an NCAP, it can execute the corresponding operation between NCAP and UE, so that appropriate communication control between NCAP and UE can be realized even when NCAP100 performs HO to another gNB while moving.
- NCAP100 may cancel, halt or postpone communication (transmission and/or reception operations) with UE200 in the event of a connection error between NCAP and gNB (e.g., Radio Link Failure (RLF)) or a disconnection of a session with the network operator.
- NCAP100 may perform transmission or reception operations for scheduled communications (data) and may continue communication with UE200 until a specified timing.
- RLF Radio Link Failure
- NCAP100 may notify UE200 that a connection error or session disconnection has occurred. NCAP100 may also notify UE200 that communication with UE200 has been discontinued, stopped, or postponed.
- UE200 may receive the notification and cancel, halt, or postpone the communication (transmission and/or reception). UE200 may perform a transmission or reception operation for the scheduled communication (data), and may continue communication with NCAP100 until the specified timing.
- NCAP100 may resume communication with UE200 when the connection state or session with the gNB is restored, or when radio link recovery is performed. NCAP100 may also notify UE200 of the resumption of communication. UE200 may resume communication with NCAP100 after receiving the notification.
- the above-mentioned information relating to this operation example may be reported from NCAP 100 to the network operator/SON mechanism.
- the information may also include the connection state or the time required to recover the session (if recovery is successful), or the fact that recovery failed (if recovery is unsuccessful).
- NCAP100 when NCAP100 terminates its operation as an NCAP, it may notify UE200 of the termination. NCAP100 may terminate the operation based on an instruction from a gNB or a network operator, or may autonomously decide to terminate the operation depending on the mobility state or communication conditions.
- UE200 may terminate communication with the NCAP in response to the notification, or may attempt to connect to another NCAP.
- NCAP100 may notify UE200 of the new NCAP to which it will connect.
- UE200 may attempt to connect to the new NCAP based on the notification.
- NCAP100 when NCAP100 is operating as an NCAP and disconnects a session with the network operator or terminates its operation as an NCAP, it can execute the corresponding operation between NCAP and UE. Therefore, even if a failure occurs while NCAP100 is moving, appropriate communication control between NCAP and UE can be achieved.
- the NCAP 100 may execute a specific exceptional operation while operating as an NCAP.
- the exceptional operation may be intended mainly for troubleshooting purposes.
- NCAP100 When NCAP100 moves, it may perform an exceptional operation if it receives permission or instruction to do so from the network operator.
- FIG. 9 shows an example sequence (part 1) for initiating an exceptional operation by NCAP100.
- NCAP100 may execute an exceptional operation when it receives an exceptional operation instruction (which may be permission, the same applies below) in response to communication from NCAP100 or UE200 to the network operator.
- the network operator has a mechanism in the CN or RAN for notifying NCAP100 of the instruction.
- the communication from NCAP100 or UE200 to the network operator may be any communication, and may be limited to communication associated with the exceptional operation.
- FIG. 10 shows a sequence example (part 2) regarding the initiation of an exceptional operation by NCAP100.
- NCAP100 may execute an exceptional operation if it receives an instruction for an exceptional operation from a network operator while performing an operation (specific operation) as a network device accommodating UE200.
- NCAP100 may not need to communicate with the network operator from NCAP100 or UE200 regarding an instruction for exceptional operation from the network operator, and may receive an instruction for exceptional operation from the network operator when operation as a network device accommodating UE200 has begun. Also, in this case, the network operator has a mechanism in the CN or RAN for notifying NCAP100 of the instruction.
- the instruction for exceptional operation from the network operator may be for each NCAP 100 (unicast) or for each group of NCAPs 100 (groupcast/multicast). Alternatively, the instruction may be for all NCAPs 100 (broadcast).
- NCAP100 When NCAP100 moves, if there is no response to a notification to the network operator and no response to communication N times at time T, NCAP100 may perform one of the following operations. Note that the values of N and T may be defined by the 3GPP specifications or may be preset by a higher layer, etc.
- the NCAP 100 may execute the following exceptional operation when present in a location (area) previously set/notified by the network operator or until the operational deadline (specific examples will be described later).
- the C-plane function and U-plane function of the CN may include the following processing.
- C-plane functions Device (equipment) registration/connection, subscriber management/retention/processing, subscriber (terminal) authentication processing, billing-related control, mobility management, session management - U-plane: Connection to IP (Internet Protocol) network, authentication processing, IP packet routing, priority control NCAP100 may perform data communication for UE200 without performing the above-mentioned C-plane functions (which may also be called C-plane-related operations).
- NCAP100 may execute the C-plane function based on a notification from the network operator. That is, the C-plane function may be executed in NCAP100, rather than executed on the network operator side. In this case, the notification may be performed in advance, or may be performed together (associated) with the instruction of the exceptional operation shown in Figures 9 and 10.
- NCAP100 when NCAP100 executes a C-plane-related operation, it may discard information related to the operation (e.g., which UE performed communication, etc.), or may report it to the network operator during or after the exceptional operation is executed.
- the report destination may be the network operator to which the UE200 connected to NCAP100 belongs.
- NCAP100 may determine whether or not to execute a C-plane related operation and/or the operation content (e.g., the type of session to be set) based on a notification from the network operator. The notification may be given in advance or may be given in conjunction with (associated with) the instruction for the exceptional operation shown in Figures 9 and 10.
- NCAP100 When NCAP100 executes an exceptional operation, it may notify UE200 that the exceptional operation is in progress.
- the notification may be a predetermined operation instruction corresponding to the exceptional operation.
- UE200 under any network operator may be able to connect to such NCAP100.
- UE200 under any network operator may be interpreted as all UE200 that can connect to the network of any network operator. In other words, UE200 may be able to connect to NCAP100 regardless of whether it is the network operator to which UE200 belongs.
- UE200 may be notified that it can connect to NCAP100 regardless of which network operator it belongs to. Alternatively, it may be notified as a specified mobile communication network (PLMN: Public Land Mobile Network) that UE200 under any network operator can connect to NCAP100. This notification may be the same as (or may be shared with) the notification that NCAP100 is in exceptional operation.
- PLMN Public Land Mobile Network
- NCAP100 as a network device as described above allows communication using the NCAP network to continue even if a failure occurs on the network operator side.
- NCAP100 may also terminate the exceptional operation as follows:
- FIG. 11 shows an example sequence (part 1) for terminating an exceptional operation by NCAP100.
- NCAP100 may execute the exceptional operation until it receives a notification of the end of the exceptional operation from the network operator.
- FIG. 12 shows an example sequence (part 2) for terminating an exceptional operation by NCAP100.
- NCAP100 may periodically (for example, at regular time intervals) send a query to the network operator and execute the exceptional operation until it receives an instruction (which may be a notification) from the network operator in response to the query to terminate the exceptional operation.
- the queries may be sent irregularly or at unequal intervals.
- NCAP100 may be constrained to always perform the operation of receiving notifications from the network operator.
- the queries and/or notifications from NCAP100 may be lower layer signals (e.g., SSB (Synchronization Signal/Physical Broadcast Channel blocks)/PRACH (Physical Random Access Channel)) or higher layer signals (e.g., RRC (Radio Resource Control) or a layer higher than RRC).
- SSB Synchronization Signal/Physical Broadcast Channel blocks
- PRACH Physical Random Access Channel
- RRC Radio Resource Control
- FIG. 13 shows a sequence example (part 3) for terminating an exceptional operation by NCAP100.
- NCAP100 may execute the exceptional operation until a time (t) has elapsed after the start of the exceptional operation.
- the time (t) may be defined by the 3GPP specifications or may be set in advance by a higher layer, etc.
- NCAP100 may terminate the exceptional operation by its own judgment, without such notification or inquiry.
- NCAP100 may notify UE200 and/or the network operator of the end of the exceptional operation.
- NCAP100 may start executing the specific operation (i.e., operation as a network device (NW device) accommodating UE200 while interacting with the network operator), or may terminate operation as a network device accommodating UE200.
- NW device network device
- NCAP100 can prevent NCAP100 from continuing the exceptional operation (or the specific operation) indefinitely, and after the failure on the network operator side is resolved, NCAP100 can quickly return to the control of the network operator.
- NCAP100 can execute the exceptional operations described above while operating as an NCAP, so that the network as a whole can execute appropriate operations, such as continuing communications, even if a failure occurs while the NCAP is moving.
- a connection can be made to a MEC server and broadband Internet via a LAN, but the LAN may be set on the same segment, or may be a different LAN that is physically or logically separated.
- NCAP100 is connected to both the network (first communication network) and the LAN (second communication network) on the network operator side, but it may be connected to only one of the networks.
- UE200 connected to the network configured by NCAP100 may or may not be separately connected to a wireless base station on the network operator side.
- the operation of NCAP100 and/or UE200 may differ based on the presence or absence of such a connection. Note that in the network configured by NCAP100, licensed bands or unlicensed bands may be used.
- each functional block may be realized using one device that is physically or logically coupled, or may be realized using two or more devices that are physically or logically separated and connected directly or indirectly (e.g., using wires, wirelessly, etc.) and these multiple devices.
- the functional blocks may be realized by combining the one device or the multiple devices with software.
- Functions include, but are not limited to, judgement, determination, judgment, calculation, computation, processing, derivation, investigation, search, confirmation, reception, transmission, output, access, resolution, selection, election, establishment, comparison, assumption, expectation, regard, broadcasting, notifying, communicating, forwarding, configuring, reconfiguring, allocating, mapping, and assignment.
- a functional block (component) that performs the transmission function is called a transmitting unit or transmitter.
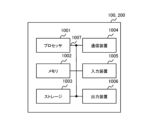
- FIG. 14 is a diagram showing an example of the hardware configuration of the NCAP 100 and UE 200.
- the NCAP 100 and UE 200 may be configured as a computer device including a processor 1001, a memory 1002, a storage 1003, a communication device 1004, an input device 1005, an output device 1006, and a bus 1007.
- apparatus can be interpreted as a circuit, device, unit, etc.
- the hardware configuration of the apparatus may be configured to include one or more of the devices shown in the figure, or may be configured to exclude some of the devices.
- Each functional block of NCAP100 and UE200 (see Figures 2 and 3) is realized by any hardware element of the computer device, or a combination of the hardware elements.
- each function of NCAP100 and UE200 is realized by loading a specific software (program) onto hardware such as processor 1001 and memory 1002, so that processor 1001 performs calculations, controls communication by communication device 1004, and controls at least one of reading and writing of data in memory 1002 and storage 1003.
- a specific software program
- the processor 1001 for example, runs an operating system to control the entire computer.
- the processor 1001 may be configured as a central processing unit (CPU) that includes an interface with peripheral devices, a control unit, an arithmetic unit, registers, etc.
- CPU central processing unit
- the processor 1001 also reads out programs (program codes), software modules, data, etc. from at least one of the storage 1003 and the communication device 1004 into the memory 1002, and executes various processes according to these.
- the programs used are those that cause a computer to execute at least some of the operations described in the above-mentioned embodiments.
- the various processes described above may be executed by one processor 1001, or may be executed simultaneously or sequentially by two or more processors 1001.
- the processor 1001 may be implemented by one or more chips.
- the programs may be transmitted from a network via a telecommunications line.
- Memory 1002 is a computer-readable recording medium and may be composed of at least one of, for example, Read Only Memory (ROM), Erasable Programmable ROM (EPROM), Electrically Erasable Programmable ROM (EEPROM), Random Access Memory (RAM), etc.
- Memory 1002 may also be called a register, cache, main memory, etc.
- Memory 1002 can store a program (program code), software module, etc. capable of executing a method according to one embodiment of the present disclosure.
- Storage 1003 is a computer-readable recording medium, and may be, for example, at least one of an optical disk such as a Compact Disc ROM (CD-ROM), a hard disk drive, a flexible disk, a magneto-optical disk (e.g., a compact disk, a digital versatile disk, a Blu-ray (registered trademark) disk), a smart card, a flash memory (e.g., a card, a stick, a key drive), a floppy (registered trademark) disk, a magnetic strip, etc.
- Storage 1003 may also be referred to as an auxiliary storage device.
- the above-mentioned recording medium may be, for example, a database, a server, or other suitable medium including at least one of memory 1002 and storage 1003.
- the communication device 1004 is hardware (transmitting/receiving device) for communicating between computers via at least one of a wired network and a wireless network, and is also called, for example, a network device, a network controller, a network card, a communication module, etc.
- the communication device 1004 may be configured to include a high-frequency switch, a duplexer, a filter, a frequency synthesizer, etc., to realize, for example, at least one of Frequency Division Duplex (FDD) and Time Division Duplex (TDD).
- FDD Frequency Division Duplex
- TDD Time Division Duplex
- the input device 1005 is an input device (e.g., a keyboard, a mouse, a microphone, a switch, a button, a sensor, etc.) that accepts input from the outside.
- the output device 1006 is an output device (e.g., a display, a speaker, an LED lamp, etc.) that performs output to the outside. Note that the input device 1005 and the output device 1006 may be integrated into one structure (e.g., a touch panel).
- each device such as the processor 1001 and the memory 1002 is connected by a bus 1007 for communicating information.
- the bus 1007 may be configured using a single bus, or may be configured using different buses between each device.
- the device may be configured to include hardware such as a microprocessor, a digital signal processor (DSP), an application specific integrated circuit (ASIC), a programmable logic device (PLD), or a field programmable gate array (FPGA), and some or all of the functional blocks may be realized by the hardware.
- DSP digital signal processor
- ASIC application specific integrated circuit
- PLD programmable logic device
- FPGA field programmable gate array
- the processor 1001 may be implemented using at least one of these pieces of hardware.
- the notification of information is not limited to the aspects/embodiments described in the present disclosure and may be performed using other methods.
- the notification of information may be performed by physical layer signaling (e.g., Downlink Control Information (DCI), Uplink Control Information (UCI)), higher layer signaling (e.g., RRC signaling, Medium Access Control (MAC) signaling, broadcast information (Master Information Block (MIB), System Information Block (SIB)), other signals, or a combination of these.
- the RRC signaling may be referred to as an RRC message, and may be, for example, an RRC Connection Setup message, an RRC Connection Reconfiguration message, etc.
- LTE Long Term Evolution
- LTE-A LTE-Advanced
- 5G 5th generation mobile communication system
- 6G 6th generation mobile communication system
- xth generation mobile communication system The present invention may be applied to at least one of systems using LTE, LTE-A, LTE-G (xG) (x is, for example, an integer or decimal point), Future Radio Access (FRA), New Radio (NR), W-CDMA (registered trademark), GSM (registered trademark), CDMA2000, Ultra Mobile Broadband (UMB), IEEE 802.11 (Wi-Fi (registered trademark)), IEEE 802.16 (WiMAX (registered trademark)), IEEE 802.20, Ultra-WideBand (UWB), Bluetooth (registered trademark), and other appropriate systems, and next-generation systems that are based on and extend these systems
- certain operations that are described as being performed by a base station may in some cases also be performed by its upper node.
- a network consisting of one or more network nodes having a base station
- various operations performed for communication with a terminal may be performed by at least one of the base station and other network nodes other than the base station (such as, but not limited to, an MME or S-GW).
- the above example shows a case where there is one other network node other than the base station, it may also be a combination of multiple other network nodes (such as an MME and an S-GW).
- Information, signals can be output from a higher layer (or a lower layer) to a lower layer (or a higher layer). They may be input and output via multiple network nodes.
- the input and output information may be stored in a specific location (e.g., memory) or may be managed using a management table.
- the input and output information may be overwritten, updated, or appended.
- the output information may be deleted.
- the input information may be sent to another device.
- the determination may be based on a value represented by one bit (0 or 1), a Boolean value (true or false), or a numerical comparison (e.g., with a predetermined value).
- notification of specific information is not limited to being done explicitly, but may be done implicitly (e.g., not notifying the specific information).
- Software shall be construed broadly to mean instructions, instruction sets, code, code segments, program code, programs, subprograms, software modules, applications, software applications, software packages, routines, subroutines, objects, executable files, threads of execution, procedures, functions, etc., whether referred to as software, firmware, middleware, microcode, hardware description language, or otherwise.
- software, instructions, information, etc. may be transmitted and received over a transmission medium.
- a transmission medium For example, if software is transmitted from a website, server, or other remote source using at least one of wired technologies (such as coaxial cable, fiber optic cable, twisted pair, Digital Subscriber Line (DSL)), and/or wireless technologies (such as infrared, microwave, etc.), then at least one of these wired and/or wireless technologies is included within the definition of a transmission medium.
- wired technologies such as coaxial cable, fiber optic cable, twisted pair, Digital Subscriber Line (DSL)
- wireless technologies such as infrared, microwave, etc.
- the information, signals, etc. described in this disclosure may be represented using any of a variety of different technologies.
- the data, instructions, commands, information, signals, bits, symbols, chips, etc. that may be referred to throughout the above description may be represented by voltages, currents, electromagnetic waves, magnetic fields or magnetic particles, optical fields or photons, or any combination thereof.
- the channel and the symbol may be a signal (signaling).
- the signal may be a message.
- the component carrier (CC) may be called a carrier frequency, a cell, a frequency carrier, etc.
- system and “network” are used interchangeably.
- radio resources may be indicated by an index.
- the names used for the above-mentioned parameters are not limiting in any respect. Furthermore, the formulas etc. using these parameters may differ from those explicitly disclosed in this disclosure.
- the various channels (e.g., PUCCH, PDCCH, etc.) and information elements may be identified by any suitable names, and therefore the various names assigned to these various channels and information elements are not limiting in any respect.
- Base station BS
- wireless base station fixed station
- NodeB NodeB
- eNodeB eNodeB
- gNodeB gNodeB
- a base station can accommodate one or more (e.g., three) cells (also called sectors). If a base station accommodates multiple cells, the overall coverage area of the base station can be divided into multiple smaller areas, and each smaller area can also provide communication services by a base station subsystem (e.g., a small indoor base station (Remote Radio Head: RRH)).
- a base station subsystem e.g., a small indoor base station (Remote Radio Head: RRH)
- cell refers to part or all of the coverage area of a base station and/or a base station subsystem that provides communication services within that coverage.
- a base station transmitting information to a terminal may be interpreted as the base station instructing the terminal to control or operate based on the information.
- MS Mobile Station
- UE User Equipment
- a mobile station may also be referred to by those skilled in the art as a subscriber station, mobile unit, subscriber unit, wireless unit, remote unit, mobile device, wireless device, wireless communication device, remote device, mobile subscriber station, access terminal, mobile terminal, wireless terminal, remote terminal, handset, user agent, mobile client, client, or some other suitable terminology.
- At least one of the base station and the mobile station may be called a transmitting device, a receiving device, a communication device, etc.
- At least one of the base station and the mobile station may be a device mounted on a moving object, or the moving object itself.
- the moving object may be a vehicle (e.g., a car, an airplane, etc.), an unmanned moving object (e.g., a drone, an autonomous vehicle, etc.), or a robot (manned or unmanned).
- At least one of the base station and the mobile station may include a device that does not necessarily move during communication operations.
- at least one of the base station and the mobile station may be an Internet of Things (IoT) device such as a sensor.
- IoT Internet of Things
- the base station in the present disclosure may be interpreted as a mobile station (user terminal, the same applies below).
- each aspect/embodiment of the present disclosure may be applied to a configuration in which communication between a base station and a mobile station is replaced with communication between multiple mobile stations (which may be called, for example, Device-to-Device (D2D), Vehicle-to-Everything (V2X), etc.).
- the mobile station may be configured to have the functions of a base station.
- terms such as "uplink” and "downlink” may be interpreted as terms corresponding to communication between terminals (for example, "side”).
- the uplink channel, downlink channel, etc. may be interpreted as a side channel (or side link).
- the mobile station in this disclosure may be interpreted as a base station.
- the base station may be configured to have the functions of the mobile station.
- a radio frame may be composed of one or more frames in the time domain. Each of the one or more frames in the time domain may be called a subframe. A subframe may further be composed of one or more slots in the time domain. A subframe may have a fixed time length (e.g., 1 ms) that is independent of numerology.
- Numerology may be a communication parameter that applies to at least one of the transmission and reception of a signal or channel. Numerology may indicate, for example, at least one of the following: Subcarrier Spacing (SCS), bandwidth, symbol length, cyclic prefix length, Transmission Time Interval (TTI), number of symbols per TTI, radio frame structure, a particular filtering operation performed by the transceiver in the frequency domain, a particular windowing operation performed by the transceiver in the time domain, etc.
- SCS Subcarrier Spacing
- TTI Transmission Time Interval
- radio frame structure a particular filtering operation performed by the transceiver in the frequency domain, a particular windowing operation performed by the transceiver in the time domain, etc.
- a slot may consist of one or more symbols in the time domain (e.g., Orthogonal Frequency Division Multiplexing (OFDM) symbols, Single Carrier Frequency Division Multiple Access (SC-FDMA) symbols, etc.).
- OFDM Orthogonal Frequency Division Multiplexing
- SC-FDMA Single Carrier Frequency Division Multiple Access
- a slot may be a numerology-based unit of time.
- a slot may include multiple minislots. Each minislot may consist of one or multiple symbols in the time domain. A minislot may also be called a subslot. A minislot may consist of fewer symbols than a slot.
- a PDSCH (or PUSCH) transmitted in a time unit larger than a minislot may be called PDSCH (or PUSCH) mapping type A.
- a PDSCH (or PUSCH) transmitted using a minislot may be called PDSCH (or PUSCH) mapping type B.
- Radio frame, subframe, slot, minislot, and symbol all represent time units for transmitting signals. Radio frame, subframe, slot, minislot, and symbol may each be referred to by a different name that corresponds to the radio frame, subframe, slot, minislot, and symbol.
- one subframe may be called a transmission time interval (TTI)
- TTI transmission time interval
- multiple consecutive subframes may be called a TTI
- one slot or one minislot may be called a TTI.
- at least one of the subframe and the TTI may be a subframe (1 ms) in existing LTE, a period shorter than 1 ms (e.g., 1-13 symbols), or a period longer than 1 ms.
- the unit expressing the TTI may be called a slot, minislot, etc., instead of a subframe.
- TTI refers to, for example, the smallest time unit for scheduling in wireless communication.
- a base station schedules each user terminal by allocating radio resources (such as frequency bandwidth and transmission power that can be used by each user terminal) in TTI units.
- radio resources such as frequency bandwidth and transmission power that can be used by each user terminal
- the TTI may be a transmission time unit for a channel-coded data packet (transport block), a code block, a code word, etc., or may be a processing unit for scheduling, link adaptation, etc.
- the time interval e.g., the number of symbols
- the time interval in which a transport block, a code block, a code word, etc. is actually mapped may be shorter than the TTI.
- one slot or one minislot when called a TTI, one or more TTIs (i.e., one or more slots or one or more minislots) may be the minimum time unit of scheduling.
- the number of slots (minislots) that constitute the minimum time unit of scheduling may be controlled.
- a TTI having a time length of 1 ms may be referred to as a normal TTI (TTI in LTE Rel. 8-12), normal TTI, long TTI, normal subframe, normal subframe, long subframe, slot, etc.
- TTI shorter than a normal TTI may be referred to as a shortened TTI, short TTI, partial or fractional TTI, shortened subframe, short subframe, minislot, subslot, slot, etc.
- a long TTI (e.g., a normal TTI, a subframe, etc.) may be interpreted as a TTI having a time length of more than 1 ms
- a short TTI e.g., a shortened TTI, etc.
- a resource block is a resource allocation unit in the time domain and frequency domain, and may include one or more consecutive subcarriers in the frequency domain.
- the number of subcarriers included in an RB may be the same regardless of the numerology, and may be, for example, 12.
- the number of subcarriers included in an RB may be determined based on the numerology.
- the time domain of an RB may include one or more symbols and may be one slot, one minislot, one subframe, or one TTI in length.
- One TTI, one subframe, etc. may each be composed of one or more resource blocks.
- one or more RBs may also be referred to as a physical resource block (PRB), a sub-carrier group (SCG), a resource element group (REG), a PRB pair, an RB pair, etc.
- PRB physical resource block
- SCG sub-carrier group
- REG resource element group
- PRB pair an RB pair, etc.
- a resource block may be composed of one or more resource elements (RE).
- RE resource elements
- one RE may be a radio resource area of one subcarrier and one symbol.
- a Bandwidth Part which may also be referred to as a partial bandwidth, may represent a subset of contiguous common resource blocks (RBs) for a given numerology on a given carrier, where the common RBs may be identified by the index of the RBs relative to a common reference point of the carriers.
- PRBs may be defined in a BWP and numbered within that BWP.
- the BWP may include a BWP for UL (UL BWP) and a BWP for DL (DL BWP).
- UL BWP UL BWP
- DL BWP DL BWP
- One or more BWPs may be configured for a UE within one carrier.
- At least one of the configured BWPs may be active, and the UE may not expect to transmit or receive a given signal/channel outside the active BWP.
- BWP bitmap
- radio frames, subframes, slots, minislots, and symbols are merely examples.
- the number of subframes included in a radio frame, the number of slots per subframe or radio frame, the number of minislots included in a slot, the number of symbols and RBs included in a slot or minislot, the number of subcarriers included in an RB, as well as the number of symbols in a TTI, the symbol length, the cyclic prefix (CP) length, and other configurations can be changed in various ways.
- connection refers to any direct or indirect connection or coupling between two or more elements, and may include the presence of one or more intermediate elements between two elements that are “connected” or “coupled” to each other.
- the coupling or connection between elements may be physical, logical, or a combination thereof.
- “connected” may be read as "access.”
- two elements may be considered to be “connected” or “coupled” to each other using at least one of one or more wires, cables, and printed electrical connections, as well as electromagnetic energy having wavelengths in the radio frequency range, microwave range, and optical (both visible and invisible) range, as some non-limiting and non-exhaustive examples.
- the reference signal may also be abbreviated as Reference Signal (RS) or referred to as a pilot depending on the applicable standard.
- RS Reference Signal
- the phrase “based on” does not mean “based only on,” unless expressly stated otherwise. In other words, the phrase “based on” means both “based only on” and “based at least on.”
- any reference to elements using designations such as “first,” “second,” etc., used in this disclosure does not generally limit the quantity or order of those elements. These designations may be used in this disclosure as a convenient way of distinguishing between two or more elements. Thus, a reference to a first and a second element does not imply that only two elements may be employed therein or that the first element must precede the second element in some way.
- determining may encompass a wide variety of actions.
- Determining and “determining” may include, for example, judging, calculating, computing, processing, deriving, investigating, looking up, search, inquiry (e.g., searching in a table, database, or other data structure), ascertaining something as “judging” or “determining”, and the like.
- Determining and “determining” may also include receiving (e.g., receiving information), transmitting (e.g., sending information), input, output, accessing (e.g., accessing data in memory), and the like as “judging” or “determining”.
- judgment and “decision” can include considering resolving, selecting, choosing, establishing, comparing, etc., to have been “judged” or “decided.” In other words, “judgment” and “decision” can include considering some action to have been “judged” or “decided.” Additionally, “judgment (decision)” can be interpreted as “assuming,” “expecting,” “considering,” etc.
- a and B are different may mean “A and B are different from each other.”
- the term may also mean “A and B are each different from C.”
- Terms such as “separate” and “combined” may also be interpreted in the same way as “different.”
- FIG. 15 shows an example of the configuration of a vehicle 2001.
- the vehicle 2001 includes a drive unit 2002, a steering unit 2003, an accelerator pedal 2004, a brake pedal 2005, a shift lever 2006, left and right front wheels 2007, left and right rear wheels 2008, an axle 2009, an electronic control unit 2010, various sensors 2021-2029, an information service unit 2012, and a communication module 2013.
- the drive unit 2002 is composed of, for example, an engine, a motor, or a hybrid of an engine and a motor.
- the steering unit 2003 includes at least a steering wheel (also called a handle) and is configured to steer at least one of the front wheels and the rear wheels based on the operation of the steering wheel operated by a user.
- the electronic control unit 2010 is composed of a microprocessor 2031, a memory (ROM, RAM) 2032, and a communication port (IO port) 2033. Signals from various sensors 2021 to 2027 provided in the vehicle are input to the electronic control unit 2010.
- the electronic control unit 2010 may be called an ECU (Electronic Control Unit).
- Signals from the various sensors 2021 to 2028 include a current signal from a current sensor 2021 that senses the current of the motor, a rotation speed signal of the front and rear wheels acquired by a rotation speed sensor 2022, an air pressure signal of the front and rear wheels acquired by an air pressure sensor 2023, a vehicle speed signal acquired by a vehicle speed sensor 2024, an acceleration signal acquired by an acceleration sensor 2025, an accelerator pedal depression amount signal acquired by an accelerator pedal sensor 2029, a brake pedal depression amount signal acquired by a brake pedal sensor 2026, a shift lever operation signal acquired by a shift lever sensor 2027, and a detection signal for detecting obstacles, vehicles, pedestrians, etc. acquired by an object detection sensor 2028.
- the information service unit 2012 is composed of various devices, such as a car navigation system, an audio system, speakers, a television, and a radio, for providing (outputting) various information such as driving information, traffic information, and entertainment information, and one or more ECUs for controlling these devices.
- the information service unit 2012 uses information acquired from external devices via the communication module 2013, etc., to provide various multimedia information and multimedia services to the occupants of the vehicle 1.
- the information service unit 2012 may include input devices (e.g., a keyboard, a mouse, a microphone, a switch, a button, a sensor, a touch panel, etc.) that accept input from the outside, and may also include output devices (e.g., a display, a speaker, an LED lamp, a touch panel, etc.) that perform output to the outside.
- input devices e.g., a keyboard, a mouse, a microphone, a switch, a button, a sensor, a touch panel, etc.
- output devices e.g., a display, a speaker, an LED lamp, a touch panel, etc.
- the driving assistance system unit 2030 is composed of various devices that provide functions for preventing accidents and reducing the driving burden on the driver, such as a millimeter wave radar, LiDAR (Light Detection and Ranging), a camera, a positioning locator (e.g., GNSS, etc.), map information (e.g., high definition (HD) map, autonomous vehicle (AV) map, etc.), a gyro system (e.g., IMU (Inertial Measurement Unit), INS (Inertial Navigation System), etc.), AI (Artificial Intelligence) chip, and an AI processor, as well as one or more ECUs that control these devices.
- the driving assistance system unit 2030 also transmits and receives various information via the communication module 2013 to realize driving assistance functions or autonomous driving functions.
- the communication module 2013 can communicate with the microprocessor 2031 and components of the vehicle 1 via the communication port.
- the communication module 2013 transmits and receives data via the communication port 2033 between the drive unit 2002, steering unit 2003, accelerator pedal 2004, brake pedal 2005, shift lever 2006, left and right front wheels 2007, left and right rear wheels 2008, axle 2009, microprocessor 2031 and memory (ROM, RAM) 2032 in electronic control unit 2010, and sensors 2021 to 2028, which are provided on the vehicle 2001.
- the communication module 2013 is a communication device that can be controlled by the microprocessor 2031 of the electronic control unit 2010 and can communicate with an external device. For example, it transmits and receives various information to and from the external device via wireless communication.
- the communication module 2013 may be located either inside or outside the electronic control unit 2010.
- the external device may be, for example, a base station, a mobile station, etc.
- the communications module 2013 may transmit at least one of the signals from the various sensors 2021-2028 input to the electronic control unit 2010, information obtained based on the signals, and information based on input from the outside (user) obtained via the information service unit 2012 to an external device via wireless communication.
- the electronic control unit 2010, the various sensors 2021-2028, the information service unit 2012, etc. may be referred to as input units that accept input.
- the PUSCH transmitted by the communications module 2013 may include information based on the above input.
- the communication module 2013 receives various information (traffic information, signal information, vehicle distance information, etc.) transmitted from an external device, and displays it on the information service unit 2012 provided in the vehicle.
- the information service unit 2012 may be called an output unit that outputs information (for example, outputs information to a device such as a display or speaker based on the PDSCH (or data/information decoded from the PDSCH) received by the communication module 2013).
- the communication module 2013 also stores various information received from an external device in a memory 2032 that can be used by the microprocessor 2031.
- the microprocessor 2031 may control the drive unit 2002, steering unit 2003, accelerator pedal 2004, brake pedal 2005, shift lever 2006, left and right front wheels 2007, left and right rear wheels 2008, axles 2009, sensors 2021 to 2028, etc. provided in the vehicle 2001.
- a first feature is a communication device connected to a first communication network, a second communication network, and a terminal, the communication device including a communication unit that performs wireless communication with the first communication network via a wireless access network, wireless communication or wired communication with the second communication network, and wireless communication with the terminal, and a control unit that, when the communication device moves, performs at least one of an operation related to the movement of the communication device and transmission/reception of information related to the movement by the communication unit.
- the second feature is the first feature, in which the control unit controls the transmission and reception of information related to the movement of at least one of the communication device and the terminal with the network side before or during operation as the communication device.
- the third feature is that in the first or second feature, the control unit controls the transmission and reception of information related to handover of the communication device to and from the terminal.
- the fourth feature is that in the first to third features, the control unit controls operations related to disconnecting a session with the network side while operating as the communication device, or controls transmission and reception of information related to the session disconnection with the terminal.
- the fifth feature is that in the first to fourth features, the control unit controls transmission and reception of operations related to the end of operation as the communication device or information related to the end of operation to and from the terminal.
- the sixth feature is that in the first to fifth features, the control unit executes a specific exceptional operation while operating as the communication device based on an instruction from the network side.
- Wireless communication systems 50 gNB 100 NCAP 110 First communication unit 120 Second communication unit 130 Third communication unit 140 Control unit 200 UE 210 wireless communication unit 220 connection IF unit 230 control unit 1001 processor 1002 memory 1003 storage 1004 communication device 1005 input device 1006 output device 1007 bus 2001 vehicle 2002 drive unit 2003 steering unit 2004 accelerator pedal 2005 brake pedal 2006 shift lever 2007 left and right front wheels 2008 left and right rear wheels 2009 axle 2010 electronic control unit 2012 information service unit 2013 communication module 2021 current sensor 2022 rotation speed sensor 2023 air pressure sensor 2024 vehicle speed sensor 2025 acceleration sensor 2026 brake pedal sensor 2027 shift lever sensor 2028 object detection sensor 2029 Accelerator pedal sensor 2030 Driving assistance system section 2031 Microprocessor 2032 Memory (ROM, RAM) 2033 communication port
Landscapes
- Engineering & Computer Science (AREA)
- Computer Networks & Wireless Communication (AREA)
- Signal Processing (AREA)
- Mobile Radio Communication Systems (AREA)
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2025530822A JPWO2025009023A1 (https=) | 2023-07-03 | 2023-07-03 | |
| PCT/JP2023/024645 WO2025009023A1 (ja) | 2023-07-03 | 2023-07-03 | 通信装置 |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2023/024645 WO2025009023A1 (ja) | 2023-07-03 | 2023-07-03 | 通信装置 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2025009023A1 true WO2025009023A1 (ja) | 2025-01-09 |
Family
ID=94171706
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2023/024645 Ceased WO2025009023A1 (ja) | 2023-07-03 | 2023-07-03 | 通信装置 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JPWO2025009023A1 (https=) |
| WO (1) | WO2025009023A1 (https=) |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11234736A (ja) * | 1998-02-13 | 1999-08-27 | Fujitsu Ltd | 移動通信システム、移動基地局、及びその制御方法 |
| JP2009534899A (ja) * | 2006-04-19 | 2009-09-24 | ノキア コーポレイション | 第1の基地局から第2の基地局への複数の移動局のハンドオーバ |
| US20180027465A1 (en) * | 2016-07-22 | 2018-01-25 | Icomera Ab | Wireless communication system for vehicles using both trackside wlan and cellular network communication |
-
2023
- 2023-07-03 JP JP2025530822A patent/JPWO2025009023A1/ja active Pending
- 2023-07-03 WO PCT/JP2023/024645 patent/WO2025009023A1/ja not_active Ceased
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11234736A (ja) * | 1998-02-13 | 1999-08-27 | Fujitsu Ltd | 移動通信システム、移動基地局、及びその制御方法 |
| JP2009534899A (ja) * | 2006-04-19 | 2009-09-24 | ノキア コーポレイション | 第1の基地局から第2の基地局への複数の移動局のハンドオーバ |
| US20180027465A1 (en) * | 2016-07-22 | 2018-01-25 | Icomera Ab | Wireless communication system for vehicles using both trackside wlan and cellular network communication |
Non-Patent Citations (1)
| Title |
|---|
| NTT DOCOMO INC.: "Study of customer-installed FR2-femto (NW-controlled access point)", 3GPP DRAFT; RWS-230252, 3RD GENERATION PARTNERSHIP PROJECT (3GPP), MOBILE COMPETENCE CENTRE ; 650, ROUTE DES LUCIOLES ; F-06921 SOPHIA-ANTIPOLIS CEDEX ; FRANCE, vol. TSG RAN, no. Taipei; 20230615 - 20230616, 11 June 2023 (2023-06-11), Mobile Competence Centre ; 650, route des Lucioles ; F-06921 Sophia-Antipolis Cedex ; France, XP052509991 * |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2025009023A1 (https=) | 2025-01-09 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2023047503A1 (ja) | 端末、無線通信システム及び無線通信方法 | |
| EP4665083A1 (en) | Communication device, wireless base station, and communication method | |
| WO2025032823A1 (ja) | 無線基地局及び通信制御方法 | |
| WO2024171315A1 (ja) | 無線基地局及び無線通信方法 | |
| CN119487916A (zh) | 终端 | |
| WO2025009023A1 (ja) | 通信装置 | |
| JP7847220B2 (ja) | 無線基地局及び無線通信方法 | |
| EP4661471A1 (en) | Communication device and communication method | |
| EP4657912A1 (en) | Communication system and communication device | |
| EP4657913A1 (en) | Communication device and communication method | |
| JP7755656B2 (ja) | 端末及び無線通信方法 | |
| WO2024166333A1 (ja) | 通信装置及び通信方法 | |
| JP2025155474A (ja) | 無線通信ノード及び無線基地局 | |
| JP2025157021A (ja) | 端末及び無線通信方法 | |
| JP2025155614A (ja) | 端末 | |
| WO2024166335A1 (ja) | 通信装置及び無線基地局 | |
| WO2025094356A1 (ja) | 端末、基地局、及び通信方法 | |
| WO2025094357A1 (ja) | 端末、及び通信方法 | |
| WO2024161527A1 (ja) | 分散ユニット、中央ユニット、無線通信システム及び無線通信方法 | |
| WO2025017906A1 (ja) | 端末及び無線通信方法 | |
| WO2025126426A1 (ja) | 通信装置及び通信方法 | |
| WO2024171418A1 (ja) | 無線基地局及び無線通信方法 | |
| WO2024024111A1 (ja) | 端末及び基地局 | |
| WO2025022590A1 (ja) | 端末及び無線通信方法 | |
| WO2025069350A1 (ja) | 端末、無線通信システム及び無線通信方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 23944275 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2025530822 Country of ref document: JP Kind code of ref document: A |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2025530822 Country of ref document: JP |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |