WO2024157332A1 - 指標算出装置、指標算出方法、およびプログラム - Google Patents
指標算出装置、指標算出方法、およびプログラム Download PDFInfo
- Publication number
- WO2024157332A1 WO2024157332A1 PCT/JP2023/001955 JP2023001955W WO2024157332A1 WO 2024157332 A1 WO2024157332 A1 WO 2024157332A1 JP 2023001955 W JP2023001955 W JP 2023001955W WO 2024157332 A1 WO2024157332 A1 WO 2024157332A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- image
- input
- index
- machine learning
- input image
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images



Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/70—Arrangements for image or video recognition or understanding using pattern recognition or machine learning
- G06V10/77—Processing image or video features in feature spaces; using data integration or data reduction, e.g. principal component analysis [PCA] or independent component analysis [ICA] or self-organising maps [SOM]; Blind source separation
- G06V10/776—Validation; Performance evaluation
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06N—COMPUTING ARRANGEMENTS BASED ON SPECIFIC COMPUTATIONAL MODELS
- G06N20/00—Machine learning
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
- G06T7/0002—Inspection of images, e.g. flaw detection
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/70—Arrangements for image or video recognition or understanding using pattern recognition or machine learning
- G06V10/74—Image or video pattern matching; Proximity measures in feature spaces
- G06V10/75—Organisation of the matching processes, e.g. simultaneous or sequential comparisons of image or video features; Coarse-fine approaches, e.g. multi-scale approaches; using context analysis; Selection of dictionaries
- G06V10/751—Comparing pixel values or logical combinations thereof, or feature values having positional relevance, e.g. template matching
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/20—Special algorithmic details
- G06T2207/20081—Training; Learning
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/20—Special algorithmic details
- G06T2207/20084—Artificial neural networks [ANN]
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30004—Biomedical image processing
- G06T2207/30024—Cell structures in vitro; Tissue sections in vitro
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30004—Biomedical image processing
- G06T2207/30096—Tumor; Lesion
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T2207/00—Indexing scheme for image analysis or image enhancement
- G06T2207/30—Subject of image; Context of image processing
- G06T2207/30168—Image quality inspection
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/70—Arrangements for image or video recognition or understanding using pattern recognition or machine learning
- G06V10/82—Arrangements for image or video recognition or understanding using pattern recognition or machine learning using neural networks
Definitions
- the present invention relates to an index calculation device, an index calculation method, and a program for calculating an index related to a prediction result output by a machine learning model.
- Machine learning models output a prediction result along with a confidence level that estimates how accurate the prediction result is.
- the confidence level is high, the prediction result may still be wrong, so there is a demand for technology that can indicate how accurate a prediction result is in a way other than the confidence level.
- Patent Document 1 discloses an image processing device that uses a trained model to generate a second medical image from a first medical image of a subject, the second medical image being generated by performing image quality improvement processing on the first medical image.
- the image processing device described in Patent Document 1 calculates the difference in pixel values between images before and after image quality improvement processing using the trained model, and warns the operator if the difference is greater than a predetermined value (for example, if tissue that does not actually exist is generated).
- Patent Document 1 does not take into account the case where the characteristics of the data between the training images used to train the trained model and the first medical image do not match (domain shift).
- One aspect of the present invention has been made in consideration of the above problems, and one example of the purpose of the present invention is to provide a technology for calculating an index that appropriately indicates how accurate the prediction results output by a machine learning model are.
- An index calculation device includes a comparison means for comparing, as an input, an image to be inferred, characteristics of a training image used in machine learning of a machine learning model that classifies the image, with characteristics of an input image input to the machine learning model during inference, and a calculation means for calculating an index indicating the possibility of an error in the classification result when the input image is input to the machine learning model, based on the difference between the characteristics of the training image and the characteristics of the input image compared by the comparison means.
- An index calculation method includes an index calculation device that uses an image to be inferred as input, compares the characteristics of a training image used in machine learning of a machine learning model that classifies the image, and the characteristics of an input image input to the machine learning model during inference, and calculates an index indicating the possibility of an error in the classification result when the input image is input to the machine learning model based on the difference between the characteristics of the training image and the characteristics of the input image compared in the comparison.
- a program according to one aspect of the present invention is a program that causes a computer to function as an index calculation device, and causes the computer to function as: a comparison means that uses an image to be inferred as input, and compares the characteristics of a training image used in machine learning of a machine learning model that classifies the image, with the characteristics of an input image input to the machine learning model during inference; and a calculation means that calculates an index that indicates the possibility of an error in the classification result when the input image is input to the machine learning model, based on the difference between the characteristics of the training image and the characteristics of the input image compared by the comparison means.
- FIG. 1 is a block diagram showing a configuration of an index calculation device according to a first exemplary embodiment of the present invention.
- FIG. 2 is a diagram showing the flow of an index calculation method according to the first exemplary embodiment of the present invention.
- FIG. 11 is a block diagram showing a configuration of a prediction error notification device according to a second exemplary embodiment of the present invention.
- 13A to 13C are diagrams illustrating an example of characteristics of a learning image and an input image in the exemplary embodiment 2 of the present invention.
- FIG. 13 is a diagram illustrating an example of an autoencoder and a latent representation vector in exemplary embodiment 2 of the present invention.
- FIG. 11 is a flow chart showing the flow of an error notification method according to an exemplary embodiment 2 of the present invention.
- FIG. 2 is a block diagram showing an example of a hardware configuration of an index calculation device and a prediction error notification device according to each exemplary embodiment of the present invention.
- Example embodiment 1 DETAILED DESCRIPTION OF THE PREFERRED EMBODIMENTS
- This exemplary embodiment is a basic form of the exemplary embodiments described below.
- the index calculation device 1 is a device that uses an image to be inferred as an input, and compares the characteristics of a learning image used in machine learning of a machine learning model that classifies the image, and the characteristics of an input image input to the machine learning model at the time of inference. Furthermore, the index calculation device 1 according to this exemplary embodiment calculates an index indicating the possibility of an error in the classification result when an input image is input to the machine learning model at the time of inference, based on the difference between the compared characteristics of the learning image and the characteristics of the input image at the time of inference.
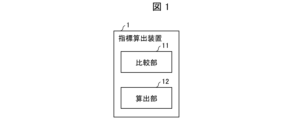
- FIG. 1 is a block diagram showing the configuration of the index calculation device 1 according to this exemplary embodiment.
- the index calculation device 1 includes a comparison unit 11 and a calculation unit 12.
- the comparison unit 11 and the calculation unit 12 are components that respectively realize a comparison means and a calculation means in this exemplary embodiment.
- the comparison unit 11 takes an image to be inferred as input and compares the characteristics of the learning image used in the machine learning of the machine learning model that classifies the image with the characteristics of the input image input to the machine learning model during inference.
- the calculation unit 12 calculates an index indicating the possibility of an error in the classification result when the input image is input to the machine learning model, based on the difference between the characteristics of the learning image and the characteristics of the input image compared by the comparison unit 11.
- the calculation unit 12 may use the difference between the characteristics of the learning image compared by the comparison unit 11 and the characteristics of the input image at the time of inference as an index indicating the possibility of an error in the classification result when an input image is input to the machine learning model at the time of inference.
- the value of the index indicating the possibility of an error in the classification result when the input image is input to the machine learning model at the time of inference will be large.
- the value of the index indicating the possibility of an error in the classification result when the input image is input to the machine learning model at the time of inference will be small.
- the index calculation device 1 has a configuration including a comparison unit 11 that uses an image to be inferred as input and compares the characteristics of the training image used in the machine learning of a machine learning model that classifies the image with the characteristics of the input image input to the machine learning model during inference, and a calculation unit 12 that calculates an index indicating the possibility of an error in the classification result when an input image is input to the machine learning model based on the difference between the characteristics of the training image and the characteristics of the input image compared by the comparison unit 11.
- the index calculation device 1 if the data properties between the learning image used in the machine learning of the machine learning model and the input image input to the machine learning at the time of inference do not match (domain shift), the value of the index indicating the possibility of an error in the classification result when the input image is input to the machine learning model at the time of inference becomes large.
- the index calculation device 1 if there is a high possibility that a domain shift has occurred, an index is calculated that indicates that there is a high possibility that the classification result when the input image is input to the machine learning model at the time of inference is erroneous.
- the index calculation device 1 has the effect of being able to calculate an index that appropriately indicates how accurate the prediction results output by the machine learning model are.
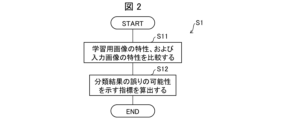
- Flow of index calculation method S1 The flow of the index calculation method S1 according to this exemplary embodiment will be described with reference to Fig. 2.
- Fig. 2 is a flow diagram showing the flow of the index calculation method S1 according to this exemplary embodiment.
- step S11 the comparison unit 11 inputs an image to be inferred and compares the characteristics of the learning image used for machine learning of the machine learning model that classifies the image with the characteristics of the input image input to the machine learning model during inference.
- Step S12 the calculation unit 12 calculates an index indicating the possibility of an error in the classification result when the input image is input into the machine learning model, based on the difference between the characteristics of the learning image and the characteristics of the input image compared by the comparison unit 11 in step S11.
- the calculation unit 12 may use the difference between the characteristics of the learning image compared by the comparison unit 11 in step S11 and the characteristics of the input image at the time of inference as an index indicating the possibility of an error in the classification result when an input image is input to the machine learning model at the time of inference.
- the value of the index indicating the possibility of an error in the classification result when the input image is input to the machine learning model at the time of inference will be large.
- the value of the index indicating the possibility of an error in the classification result when the input image is input to the machine learning model at the time of inference will be small.
- the index calculation method S1 employs a configuration including step S11 in which the comparison unit 11 uses an image to be inferred as input and compares the characteristics of the training image used in the machine learning of the machine learning model that classifies the image with the characteristics of the input image input to the machine learning model during inference, and step S12 in which the calculation unit 12 calculates an index indicating the possibility of an error in the classification result when an input image is input to the machine learning model based on the difference between the characteristics of the training image and the characteristics of the input image compared by the comparison unit 11 in step S11.
- the index calculation method S1 provides the same effects as the index calculation device 1 described above.
- Exemplary embodiment 2 A second exemplary embodiment of the present invention will be described in detail with reference to the drawings. Note that components having the same functions as those described in the first exemplary embodiment are denoted by the same reference numerals, and the description thereof will be omitted as appropriate.
- the prediction error notification device 2 is a device that takes an image to be inferred as input, and compares the characteristics of training images used in machine learning of a machine learning model that classifies the image, with the characteristics of an input image input to the machine learning model during inference.
- An example of an image input to the machine learning model during inference is a pathology image that contains specimen cells as its subject.
- the machine learning model may be configured to output a classification result indicating whether the specimen cells contained as the subject in the input pathology image are benign or malignant.
- machine learning models examples include a Convolution Neural Network (CNN), a Recurrent Neural Network (RNN), or a combination of these.
- CNN Convolution Neural Network
- RNN Recurrent Neural Network
- Non-neural network models such as random forests and support vector machines may also be used.
- the characteristics of the training images and the input images at the time of inference are not particularly limited, but examples include the color or brightness of the input images at the time of inference and the training images, the noise level contained in the input images at the time of inference and the training images, and the latent representation vector obtained by inputting the training images and the input images at the time of inference to an autoencoder AE that has been trained using the training images.
- the autoencoder AE and the latent representation vector will be described later.
- the prediction error notification device 2 also calculates an index indicating the possibility of an error in the classification result when the input image at the time of inference is input to the machine learning model, based on the difference between the characteristics of the compared learning images and the characteristics of the input image at the time of inference.
- the prediction error notification device 2 has the functions of the index calculation device 1 described above.
- an indicator of the possibility of an error in the classification result when an input image is input to a machine learning model during inference may be the exact difference between the characteristics of the compared training image and the characteristics of the input image during inference.
- an indicator of the possibility of an error in the classification result when an input image is input to a machine learning model during inference may be the probability that the classification result is estimated to be incorrect.
- the prediction error notification device 2 determines that the classification result may be erroneous, it notifies the user that the classification result may be erroneous.
- the manner in which the prediction error notification device 2 notifies the user that the classification result may be erroneous is not limited, and the prediction error notification device 2 may display an image including text indicating that the classification result may be erroneous, or may output an audio message indicating that the classification result may be erroneous.
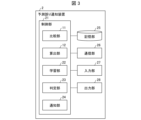
- Fig. 3 is a block diagram showing the configuration of the prediction error notifying device 2 according to this exemplary embodiment.
- the prediction error notification device 2 includes a control unit 21, a memory unit 25, a communication unit 26, an input unit 27, and an output unit 28.
- the memory unit 25 stores data referenced by the control unit 21. Examples of data stored in the memory unit 25 include input images and learning images used during inference.
- the communication unit 26 is a communication module that communicates with other devices connected via a network.
- the communication unit 26 receives learning images or input images used during inference, and outputs information indicating that the classification results may be erroneous.
- the input unit 27 is an interface that acquires data from other connected devices. As an example, the input unit 27 acquires learning images or input images for inference.
- the output unit 28 is an interface that outputs data to other connected devices. As an example, the output unit 28 outputs information indicating that the classification result may be erroneous.
- the control unit 21 controls each component included in the prediction error notification device 2. As shown in Fig. 3, the control unit 21 also includes a comparison unit 11, a calculation unit 12, a learning unit 22, a determination unit 23, and a notification unit 24. In this exemplary embodiment, the comparison unit 11, the calculation unit 12, the determination unit 23, and the notification unit 24 respectively function as a comparison means, a calculation means, a determination means, and a notification means. Examples of processes executed by the comparison unit 11, the calculation unit 12, the determination unit 23, and the notification unit 24 will be described later.
- the comparison unit 11 takes an image to be inferred as input and compares the characteristics of the learning image used in the machine learning of the machine learning model that classifies the image, and the characteristics of the input image input to the machine learning model during inference.
- the comparison unit 11 stores the comparison result in the memory unit 25.
- the characteristics of the training image and the characteristics of the input image at the time of inference may be analyzed by another device.
- the comparison unit 11 compares the characteristics of the training image and the characteristics of the input image based on the analysis results of the other device.
- the characteristics of the training image and the characteristics of the input image at the time of inference may also be analyzed by the comparison unit 11. The following describes the case where the comparison unit 11 analyzes the characteristics of the training image and the characteristics of the input image at the time of inference.
- the calculation unit 12 calculates an index indicating the possibility of an error in the classification result when an input image is input to the machine learning model at the time of inference, based on the difference between the characteristics of the learning image compared by the comparison unit 11 and the characteristics of the input image at the time of inference.
- the calculation unit 12 stores the calculated index in the memory unit 25.
- the learning unit 22 trains the machine learning model using the training images stored in the memory unit 25.
- the learning unit 22 trains the machine learning model to use pathological images containing specimen cells as subjects as training images, and output a classification result that classifies the specimen cells as benign or malignant.
- the determination unit 23 determines whether the index calculated by the calculation unit 12 is equal to or greater than a threshold value. The determination unit 23 stores the determination result in the storage unit 25.
- the notification unit 24 notifies the user of the classification result by the machine learning model.
- the notification unit 24 may notify the user that the classification result is erroneous by outputting information indicating that the classification result is erroneous via the communication unit 26 or the output unit 28.
- the notification unit 24 may further notify information about the index determined to be equal to or greater than the threshold. Examples of information about an index include the index itself and the characteristics compared by the comparison unit 11 to calculate the index.
- the comparison unit 11 may compare the pixel values of each RGB color of the learning image and the input image at the time of inference as the characteristics of the learning image and the input image at the time of inference.
- FIG. 4 is a diagram showing an example of the characteristics of the learning image and the input image at the time of inference in this exemplary embodiment.
- the upper side of FIG. 4 is a histogram of the pixel values of each RGB color of the learning image.
- the lower side of FIG. 4 is a histogram of the pixel values of each RGB color of the input image at the time of inference.
- the comparison unit 11 compares the learning image and the input image at the time of inference using a histogram showing the relationship between the pixel values of each RGB color and the number of pixels for each of the learning image and the input image at the time of inference.
- the comparison unit 11 calculates and compares the average value, median value, and mode value for each of the RGB colors.
- FIG. 4 shows the average value A1, median value M1, and mode value F1 of R in the learning image, and the average value A2, median value M2, and mode value F2 of R in the input image at the time of inference.
- the comparison unit 11 may compare the HSV (Hue, Saturation, Value) of the learning image and the input image at the time of inference, instead of each RGB color.
- the comparison unit 11 may use a histogram showing the relationship between the pixel value of each HSV and the number of pixels.
- the comparison unit 11 may compare the noise levels contained in the learning image and the input image at the time of inference as the characteristics of the learning image and the input image at the time of inference.
- the comparison unit 11 makes the comparison using a histogram that shows the relationship between the pixel values (brightness values) and the number of pixels in the background regions (regions in the image other than the specimen cells) of the learning image and the input image at the time of inference.
- the comparison unit 11 compares the pixel values in the background regions of the learning image and the input image at the time of inference as the noise levels of the learning image and the input image at the time of inference.
- the comparison unit 11 calculates and compares the average, median, and 95% confidence interval of the noise levels of the learning images and the input images at the time of inference.
- the comparison unit 11 may compare latent representation vectors obtained by inputting the learning image and the input image at the time of inference to an autoencoder AE that has been trained using the learning image as characteristics of the learning image and the input image at the time of inference.
- the autoencoder AE and the latent representation vectors will be described with reference to Fig. 5.
- Fig. 5 is a diagram showing an example of the autoencoder AE and the latent representation vectors in this exemplary embodiment.
- the autoencoder AE includes an encoder and a decoder.
- the autoencoder AE is generated by unsupervised learning using training images.
- the autoencoder AE compresses the dimensions of the input image via the encoder, reducing the dimensions to a latent representation vector that represents important features.
- the autoencoder AE then outputs an image that has been restored to its original dimensions via the decoder.
- the comparison unit 11 inputs a training image and an input image at the time of inference to the autoencoder AE, and obtains and compares the latent representation vectors of the training image and the input image at the time of inference generated by the encoder of the autoencoder AE.
- the comparison unit 11 may input multiple training images (or input images) to the autoencoder AE, and compare the average values of the multiple obtained latent representation vectors.
- the latent representation vector obtained by inputting a learning image to the autoencoder AE is ( fL1 , fL2 , ..., fLn )
- the latent representation vector obtained by inputting an input image at the time of inference to the autoencoder AE is ( fI1 , fI2 , ..., fIn ).
- the comparison unit 11 compares fL1 with fI1 , fL2 with fI2 , ..., and fLn with fIn , respectively.
- the comparison unit 11 makes a comparison using a histogram showing the relationship between the pixel value and the number of pixels for each RGB color of the learning image and the input image at the time of inference.
- the calculation unit 12 first calculates the difference between the average value, median value, and mode value for each RGB color of the learning image and the input image at the time of inference. For example, it is assumed that the calculation unit 12 calculates the difference between the average value A1, median value M1, and mode value F1 of R of the learning image shown in FIG. 4, and the average value A2, median value M2, and mode value F2 of R of the input image at the time of inference. In this case, the calculation unit 12 calculates (A1-A2), (M1-M2), and (F1-F2). The calculation unit 12 performs similar calculations for each G and B color.
- the calculation unit 12 calculates an index based on the calculated difference.
- the calculation unit 12 may use the calculated differences (A1-A2), (M1-M2), and (F1-F2) as the index.
- the comparison unit 11 compares the noise levels contained in the learning images and the input images at the time of inference as characteristics of the learning images and the input images at the time of inference.
- the calculation unit 12 first calculates the differences between the average value, median, and 95% confidence interval of the noise level contained in the learning images and the average value, median, and 95% confidence interval of the noise level contained in the input images at the time of inference.
- the calculation unit 12 calculates an index based on the calculated difference.
- the calculation unit 12 may use the calculated difference as the index.
- the comparison unit 11 compares latent representation vectors obtained by inputting the learning image and the input image at the time of inference into the autoencoder AE as characteristics of the learning image and the input image at the time of inference.
- the calculation unit 12 first calculates the difference between the latent representation vectors of the learning image and the input image at the time of inference.
- the comparison unit 11 calculates (f L 1-f I 1), (f L 2-f I 2), ..., (f L n-f I n) as the difference.
- the calculation unit 12 calculates an index based on the calculated difference.
- the calculation unit 12 may use the calculated difference as the index.
- the calculation unit 12 may be configured to calculate the difference between the latent representation vectors of the learning image and the input image at the time of inference when there is a large difference between the input image at the time of inference input to the autoencoder AE and the output image output from the autoencoder AE, in other words, when the restoration accuracy is poor.
- the calculation unit 12 calculates the mean squared error between the input image at the time of inference and the output image output when the input image at the time of inference is input to the autoencoder AE as the difference. In this case, if the calculated difference is greater than a predetermined value, the calculation unit 12 calculates the difference between the latent representation vectors of the learning image and the input image at the time of inference.
- the autoencoder AE is generated by unsupervised learning using training images. Therefore, if an input image at the time of inference, in which the characteristics of the training image and the data do not match, is input to the autoencoder AE, an image that differs greatly from the input image at the time of inference is output from the autoencoder AE. On the other hand, if an input image at the time of inference, in which the characteristics of the training image and the data match, is input to the autoencoder AE, an image that differs little from the input image at the time of inference is output from the autoencoder AE.
- the calculation unit 12 may calculate the difference in the latent representation vectors of the learning image and the input image at the time of inference.
- the calculation unit 12 does not need to calculate the difference between the latent representation vectors of the learning image and the input image at the time of inference.
- the calculation unit 12 may be configured to determine whether the difference is equal to or greater than a threshold and calculate a predetermined probability according to the determination result as the index, other than the calculated difference as the index. For example, when the difference is equal to or greater than the threshold, the calculation unit 12 calculates an index that is a probability of "80%" that the classification result is incorrect. On the other hand, when the difference is less than the threshold, the calculation unit 12 calculates an index that is a probability of "20%" that the classification result is incorrect.
- the calculation unit 12 may be configured to use multiple thresholds to determine whether each of the multiple thresholds is equal to or greater than the threshold, and calculate the index. For example, when the difference is equal to or greater than a first threshold, the calculation unit 12 calculates an index that is a probability of "80%" that the classification result is incorrect. On the other hand, when the difference is less than the first threshold, the calculation unit 12 determines whether the difference is equal to or greater than a second threshold that is lower than the first threshold. When the difference is equal to or greater than the second threshold, the calculation unit 12 calculates an index that is a probability of "50%" that the classification result is incorrect.
- the calculation unit 12 calculates an index that is a probability of "20%" that the classification result is incorrect. In this way, the calculation unit 12 calculates the difference such that the larger the value, the higher the probability that the classification result is incorrect.
- the determination unit 23 determines whether each index is equal to or greater than a threshold value. That is, the determination unit 23 determines whether each index of the average value, median value, and mode value of R, the average value, median value, and mode value of G, the average value, median value, and mode value of B, is equal to or greater than a threshold value.
- the determination unit 23 similarly determines whether each index is equal to or greater than a threshold value.
- the determination unit 23 determines whether the index of each latent representation vector is equal to or greater than a threshold value.
- the determination unit 23 determines whether each probability is equal to or greater than a threshold value.
- Example 1 of Processing Executed by Notification Unit 24 When the judgment unit 23 judges whether or not multiple indicators are above a threshold, as an example, when it is judged that at least one indicator is above the threshold, the notification unit 24 may notify the classification result and a notice that the classification result may be erroneous.
- the determination unit 23 determines whether each of the indices of the average value of R, the median value of R, the mode value of R, the average value of G, the median value of G, the mode value of G, the average value of B, the median value of B, and the mode value of B is equal to or greater than a threshold value, and the index of the median value of R is equal to or greater than the threshold value.
- the notification unit 24 since it is determined that at least one of the multiple indices is equal to or greater than the threshold value, the notification unit 24 notifies the classification result and a fact that the classification result may be erroneous.
- the notification unit 24 may notify the classification result and a message indicating that the classification result may be erroneous.
- Example 2 of Processing Executed by Notification Unit 24 For example, assume that the input image is a pathology image containing specimen cells as subjects, the classification result is “benign”, and the determination unit 23 determines that the index is equal to or greater than the threshold. In this case, as an example, the notification unit 24 outputs, via the communication unit 26 or the output unit 28, the classification result of “benign” and the text “The classification result may be incorrect” as information indicating that the classification result may be incorrect.
- the notification unit 24 may further notify information about the index determined to be equal to or greater than the threshold.
- the notification unit 24 may notify the classification result, a message indicating that the classification result may be erroneous, and a message indicating that the median of R is different between the learning image and the input image at the time of inference.
- the notification unit 24 may notify that the m-th latent representation vector is different, in addition to the classification result and a message that the classification result may be erroneous.
- Flow of error notification method S2 The flow of the error notification method S2 according to this exemplary embodiment will be described with reference to Fig. 6.
- Fig. 6 is a flow diagram showing the flow of the error notification method S2 according to this exemplary embodiment.
- step S21 the learning unit 22 uses the learning images stored in the storage unit 25 to generate a machine learning model that classifies an image to be inferred as an input.
- step S22 the comparison unit 11 analyzes the characteristics of the learning images stored in the storage unit 25.
- the comparison unit 11 stores the analysis results in the storage unit 25.
- step S23 the comparison unit 11 analyzes the characteristics of the input image at the time of inference stored in the storage unit 25.
- the comparison unit 11 stores the analysis result in the storage unit 25.
- step S24 the comparison unit 11 compares the characteristics of the learning image and the characteristics of the input image at the time of inference, based on the analysis result stored in the storage unit 25.
- the comparison unit 11 stores the comparison result in the storage unit 25.
- Step S25 the control unit 21 inputs the input image at the time of inference to the machine learning model generated in step S21, and obtains the classification result output from the machine learning model.
- the control unit 21 stores the obtained classification result in the storage unit 25.
- step S26 the calculation unit 12 acquires the comparison result stored in the storage unit 25. Based on the acquired comparison result, the calculation unit 12 calculates a difference between the characteristics of the learning image and the characteristics of the input image at the time of inference. Next, based on the calculated difference, the calculation unit 12 calculates an index indicating the possibility of an error in the classification result when the input image at the time of inference is input to the machine learning model.
- the error notification method S2 includes the processing executed in the index calculation method S1 described above.
- Step S27 the determination unit 23 determines whether the index calculated by the calculation unit 12 is equal to or greater than a threshold value.
- Step S28 If it is determined in step S27 that the index is equal to or greater than the threshold (step S27: YES), in step S28, the notification unit 24 notifies the classification result stored in the storage unit 25 and a message indicating that the classification result may be erroneous. As described above, the notification unit 24 may notify information regarding the index determined to be equal to or greater than the threshold, in addition to the classification result and a message indicating that the classification result may be erroneous.
- Step S29 On the other hand, if it is determined in step S27 that the index is less than the threshold value (step S27: NO), in step S29, the notification unit 24 notifies the classification result.
- the prediction error notifying device 2 is configured to include a determination unit 23 that determines whether an index is equal to or greater than a threshold value, and a notification unit 24 that, when the determination unit 23 determines that the index is equal to or greater than the threshold value, notifies the user of the classification result and a possibility that the classification result is an error.
- the prediction error notification device 2 when the index is equal to or greater than the threshold, i.e., when there is a high possibility that a domain shift has occurred, a notification is given that the classification result may be erroneous. Therefore, according to the prediction error notification device 2 according to this exemplary embodiment, it is possible to obtain the effect of being able to notify the user that the prediction result output by the machine learning model may be erroneous when there is a high possibility that a domain shift has occurred.
- index calculation device 1 and the prediction error notification device 2 may be realized by hardware such as an integrated circuit (IC chip), or may be realized by software.
- the index calculation device 1 and the prediction error notification device 2 are realized, for example, by a computer that executes instructions of a program, which is software that realizes each function.
- a computer that executes instructions of a program, which is software that realizes each function.
- FIG. 7 An example of such a computer (hereinafter referred to as computer C) is shown in FIG. 7.
- the computer C has at least one processor C1 and at least one memory C2.
- the memory C2 stores a program P for operating the computer C as the index calculation device 1 and the prediction error notification device 2.
- the processor C1 reads and executes the program P from the memory C2, thereby realizing each function of the index calculation device 1 and the prediction error notification device 2.
- the processor C1 may be, for example, a CPU (Central Processing Unit), GPU (Graphic Processing Unit), DSP (Digital Signal Processor), MPU (Micro Processing Unit), FPU (Floating point number Processing Unit), PPU (Physics Processing Unit), TPU (Tensor Processing Unit), quantum processor, microcontroller, or a combination of these.
- the memory C2 may be, for example, a flash memory, HDD (Hard Disk Drive), SSD (Solid State Drive), or a combination of these.
- Computer C may further include a RAM (Random Access Memory) for expanding program P during execution and for temporarily storing various data.
- Computer C may further include a communications interface for sending and receiving data to and from other devices.
- Computer C may further include an input/output interface for connecting input/output devices such as a keyboard, mouse, display, and printer.
- the program P can also be recorded on a non-transitory, tangible recording medium M that can be read by the computer C.
- a recording medium M can be, for example, a tape, a disk, a card, a semiconductor memory, or a programmable logic circuit.
- the computer C can obtain the program P via such a recording medium M.
- the program P can also be transmitted via a transmission medium.
- a transmission medium can be, for example, a communications network or broadcast waves.
- the computer C can also obtain the program P via such a transmission medium.
- An index calculation device comprising: a comparison means for comparing, as input, an image to be inferred, characteristics of a training image used in machine learning of a machine learning model that classifies the image, with characteristics of an input image input to the machine learning model during inference; and a calculation means for calculating, based on the difference between the characteristics of the training image and the characteristics of the input image compared by the comparison means, an index indicating the possibility of an error in the classification result when the input image is input to the machine learning model.
- (Appendix 2) 2.
- Appendix 4 The index calculation device according to any one of appendices 1 to 3, wherein the characteristics are at least any of color or brightness in the input image and the training image, noise levels contained in the input image and the training image, and a latent representation vector obtained by inputting the training image and the input image to an autoencoder that has been trained using the training image.
- An index calculation method including: an index calculation device that uses an image to be inferred as input, compares characteristics of a training image used in machine learning of a machine learning model that classifies the image, and characteristics of an input image input to the machine learning model at the time of inference; and calculates an index that indicates the possibility of an error in the classification result when the input image is input to the machine learning model based on a difference between the characteristics of the training image and the characteristics of the input image compared in the comparison.
- a program that causes a computer to function as an index calculation device, the program causing the computer to function as: a comparison means that compares, using an image to be inferred as input, the characteristics of a training image used in machine learning of a machine learning model that classifies the image, with the characteristics of an input image input to the machine learning model at the time of inference; and a calculation means that calculates an index indicating the possibility of an error in the classification result when the input image is input to the machine learning model, based on the difference between the characteristics of the training image and the characteristics of the input image compared by the comparison means.
- An index calculation device having at least one processor, the processor performing a comparison process in which an image to be inferred is used as input, and the characteristics of a training image used in machine learning of a machine learning model that classifies the image are compared with the characteristics of an input image input to the machine learning model at the time of inference, and a calculation process in which an index indicating the possibility of an error in the classification result when the input image is input to the machine learning model is calculated based on the difference between the characteristics of the training image and the characteristics of the input image compared in the comparison process.
- the index calculation device may further include a memory, and the memory may store a program for causing the processor to execute the comparison process and the calculation process.
- the program may also be recorded on a computer-readable, non-transitory, tangible recording medium.
Landscapes
- Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Software Systems (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Computing Systems (AREA)
- Artificial Intelligence (AREA)
- Evolutionary Computation (AREA)
- Medical Informatics (AREA)
- Health & Medical Sciences (AREA)
- Databases & Information Systems (AREA)
- General Health & Medical Sciences (AREA)
- Multimedia (AREA)
- Quality & Reliability (AREA)
- Data Mining & Analysis (AREA)
- General Engineering & Computer Science (AREA)
- Mathematical Physics (AREA)
- Image Analysis (AREA)
Priority Applications (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2024572550A JPWO2024157332A1 (https=) | 2023-01-23 | 2023-01-23 | |
| US18/288,859 US20250078449A1 (en) | 2023-01-23 | 2023-01-23 | Index calculating apparatus, index calculation method, and recording medium |
| PCT/JP2023/001955 WO2024157332A1 (ja) | 2023-01-23 | 2023-01-23 | 指標算出装置、指標算出方法、およびプログラム |
| EP23918305.6A EP4657334A4 (en) | 2023-01-23 | 2023-01-23 | Index calculation device, index calculation method, and program |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2023/001955 WO2024157332A1 (ja) | 2023-01-23 | 2023-01-23 | 指標算出装置、指標算出方法、およびプログラム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2024157332A1 true WO2024157332A1 (ja) | 2024-08-02 |
Family
ID=91970253
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2023/001955 Ceased WO2024157332A1 (ja) | 2023-01-23 | 2023-01-23 | 指標算出装置、指標算出方法、およびプログラム |
Country Status (4)
| Country | Link |
|---|---|
| US (1) | US20250078449A1 (https=) |
| EP (1) | EP4657334A4 (https=) |
| JP (1) | JPWO2024157332A1 (https=) |
| WO (1) | WO2024157332A1 (https=) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20250077650A1 (en) * | 2023-08-31 | 2025-03-06 | Dell Products L.P. | Managing impact of poisoned inferences on inference consumers based on use of the inferences by the inference consumers |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020103880A (ja) | 2018-12-26 | 2020-07-09 | キヤノン株式会社 | 画像処理装置、画像処理方法、及びプログラム |
| JP2022076203A (ja) * | 2020-11-09 | 2022-05-19 | 富士通株式会社 | データ生成プログラム、データ生成方法および情報処理装置 |
| JP2022142197A (ja) * | 2021-03-16 | 2022-09-30 | 国立大学法人室蘭工業大学 | 制御装置、制御方法、及びプログラム |
| WO2022244787A1 (ja) * | 2021-05-19 | 2022-11-24 | 京セラ株式会社 | 情報処理方法、プログラム及び情報処理装置 |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6757378B2 (ja) * | 2018-08-28 | 2020-09-16 | 株式会社モルフォ | 画像識別装置、画像識別方法及び画像識別プログラム |
| JP7381942B2 (ja) * | 2020-01-17 | 2023-11-16 | 富士通株式会社 | 制御方法、情報処理装置および制御プログラム |
-
2023
- 2023-01-23 JP JP2024572550A patent/JPWO2024157332A1/ja active Pending
- 2023-01-23 EP EP23918305.6A patent/EP4657334A4/en active Pending
- 2023-01-23 WO PCT/JP2023/001955 patent/WO2024157332A1/ja not_active Ceased
- 2023-01-23 US US18/288,859 patent/US20250078449A1/en active Pending
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020103880A (ja) | 2018-12-26 | 2020-07-09 | キヤノン株式会社 | 画像処理装置、画像処理方法、及びプログラム |
| JP2022076203A (ja) * | 2020-11-09 | 2022-05-19 | 富士通株式会社 | データ生成プログラム、データ生成方法および情報処理装置 |
| JP2022142197A (ja) * | 2021-03-16 | 2022-09-30 | 国立大学法人室蘭工業大学 | 制御装置、制御方法、及びプログラム |
| WO2022244787A1 (ja) * | 2021-05-19 | 2022-11-24 | 京セラ株式会社 | 情報処理方法、プログラム及び情報処理装置 |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP4657334A1 |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2024157332A1 (https=) | 2024-08-02 |
| EP4657334A1 (en) | 2025-12-03 |
| US20250078449A1 (en) | 2025-03-06 |
| EP4657334A4 (en) | 2026-03-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US20210056711A1 (en) | Arithmetic processing apparatus and method | |
| US20200175377A1 (en) | Training apparatus, processing apparatus, neural network, training method, and medium | |
| CN112598579A (zh) | 面向监控场景的图像超分辨率方法、装置及存储介质 | |
| US8693791B2 (en) | Object detection apparatus and object detection method | |
| US20210019636A1 (en) | Prediction model construction device, prediction model construction method and prediction model construction program recording medium | |
| WO2024157332A1 (ja) | 指標算出装置、指標算出方法、およびプログラム | |
| US12561966B2 (en) | Learning apparatus, recognition apparatus, learning method, and storage medium | |
| CN113344907B (zh) | 一种图像检测方法及装置 | |
| US20210210393A1 (en) | Information processing apparatus and information processing method | |
| US11869492B2 (en) | Anomaly detection system and method using noise signal and adversarial neural network | |
| US11854204B2 (en) | Information processing device, information processing method, and computer program product | |
| JP7322358B2 (ja) | 情報処理プログラム、情報処理方法、及び情報処理装置 | |
| US20230196746A1 (en) | Data generation method, data generation apparatus and program | |
| JP7841648B2 (ja) | 物体検出装置、物体検出方法、及び物体検出プログラム | |
| CN117651957A (zh) | 稳定范围决定系统、稳定范围决定方法以及稳定范围决定程序 | |
| JP2023069081A (ja) | 説明プログラム、説明方法および情報処理装置 | |
| US20250384571A1 (en) | Information processing apparatus, information processing method, and non-transitory computer readable recording medium | |
| JP7680659B2 (ja) | 学習装置、学習方法、及び学習プログラム、並びに、分類装置、分類方法、及び分類プログラム | |
| JP7779372B2 (ja) | 情報処理装置、情報処理方法、およびプログラム | |
| US20230409924A1 (en) | Processing device | |
| US12288385B2 (en) | Learning device, detection device, learning system, learning method, computer program product for learning, detection method, and computer program product for detecting | |
| US11922710B2 (en) | Character recognition method, character recognition device and non-transitory computer readable medium | |
| US20240104908A1 (en) | Evaluation method | |
| JP2025112795A (ja) | 情報処理装置、情報処理装置の制御方法およびプログラム | |
| WO2024232048A1 (ja) | モデル評価装置、モデル評価方法、プログラム |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| WWE | Wipo information: entry into national phase |
Ref document number: 18288859 Country of ref document: US |
|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 23918305 Country of ref document: EP Kind code of ref document: A1 |
|
| WWP | Wipo information: published in national office |
Ref document number: 18288859 Country of ref document: US |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2024572550 Country of ref document: JP |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| WWP | Wipo information: published in national office |
Ref document number: 2023918305 Country of ref document: EP |