WO2024142804A1 - 情報処理装置、検出装置、情報処理方法、および記録媒体 - Google Patents
情報処理装置、検出装置、情報処理方法、および記録媒体 Download PDFInfo
- Publication number
- WO2024142804A1 WO2024142804A1 PCT/JP2023/043592 JP2023043592W WO2024142804A1 WO 2024142804 A1 WO2024142804 A1 WO 2024142804A1 JP 2023043592 W JP2023043592 W JP 2023043592W WO 2024142804 A1 WO2024142804 A1 WO 2024142804A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- intermediate data
- image
- images
- information processing
- image set
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images



















Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/20—Image preprocessing
- G06V10/24—Aligning, centring, orientation detection or correction of the image
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/70—Arrangements for image or video recognition or understanding using pattern recognition or machine learning
- G06V10/82—Arrangements for image or video recognition or understanding using pattern recognition or machine learning using neural networks
Definitions
- the present invention relates to an information processing device, a detection device, an information processing method, and a program.
- Patent Document 2 discloses an image processing device that extracts images including an object presence area where an object exists from each observed image, and deforms the object presence area based on the observation angle of each image and the size of the object. Patent Document 2 also describes determining changes in the object using the images obtained by deformation.
- Non-Patent Document 2 describes the use of adversarial learning of the encoder and classifier for application to unsupervised domains.
- Patent Document 3 discloses a learning device that performs machine learning (semi-supervised learning) using supervised data and unsupervised data. Specifically, Patent Document 3 describes that the learning device performs data conversion equivalent to domain adaptation on data with domain information and data without domain information, and performs machine learning such as class identification.
- Patent Document 4 describes a method for training a domain adversarial neural network. Specifically, Patent Document 4 discloses a feature extraction unit that extracts a first feature from labeled source data and extracts a second feature from unlabeled target data. Patent Document 4 also discloses a label prediction unit that predicts the label of source data based on the first feature and predicts the label of target data based on the second feature. Patent Document 4 also describes training the label prediction unit and the feature extraction unit.
- Non-Patent Document 1 and Patent Document 1 the accuracy of change detection depends on the training data used for learning, so there are cases where change detection is not successful for images obtained under unlearned conditions.
- the technologies disclosed in Non-Patent Document 2, Patent Document 2, and Patent Document 4 do not enable detection of differences between multiple images. With the technology disclosed in Patent Document 3, it is necessary to know the size of the target object in advance.
- one example of the objective of the present invention is to provide an information processing device, a detection device, an information processing method, and a program that enable difference detection for various image sets.
- a detection device including detection means for detecting a difference between two or more images using the intermediate data generator updated by the first update means provided in the above information processing device and the difference detector.
- One or more computers using a first set of images, to generate a detector including an intermediate data generator that receives an input of an image set including two or more images and generates an intermediate data set including two or more intermediate data, and a difference detector that detects a difference between the two or more images using the intermediate data set; inputting a second of the set of images into the intermediate data generator to generate the intermediate data set corresponding to the second set of images and updating the intermediate data generator with the intermediate data set;
- the second image set includes a different-angle image obtained at an imaging angle different from any of two or more images included in the first image set.
- a computer-readable recording medium having a program recorded thereon, The program causes a computer to a generating means for generating, using a first set of images, a detector including an intermediate data generator that receives an input of an image set including two or more images and generates an intermediate data set including two or more intermediate data, and a difference detector that detects a difference between the two or more images using the intermediate data set; and a first updating means for inputting a second set of images to the intermediate data generator to generate the intermediate data set corresponding to the second set of images, and updating the intermediate data generator using the intermediate data set;
- a recording medium is provided in which the second image set includes different-angle images obtained at an imaging angle different from any of the two or more images included in the first image set.
- FIG. 1 is a diagram showing an overview of an information processing apparatus according to a first embodiment
- FIG. 1 is a diagram showing an overview of an information processing method according to a first embodiment
- 11 is a diagram for explaining the relationship between a captured image and a difference map.
- FIG. FIG. 2 is a diagram for explaining capturing of a satellite image.
- FIG. 2 is a diagram illustrating a functional configuration of a detector according to the first embodiment. 4 is a diagram for explaining functions of an intermediate data generator and a difference detector according to the first embodiment;
- FIG. FIG. 2 is a diagram illustrating a functional configuration of the information processing device according to the first embodiment.
- 10 is a diagram illustrating an example of the configuration of data stored in a first image set storage unit;
- FIG. 10 is a diagram illustrating an example of the configuration of data stored in a first image set storage unit; FIG.
- the first update unit 150 may use multiple image sets in one step S11 and repeatedly update the discriminator 250.
- the update of the discriminator 250 is repeated, for example, until a termination condition is satisfied.
- the termination condition is, for example, at least one of the number of updates in step S11 being equal to or greater than a predetermined number and the loss Lb being equal to or less than a predetermined standard.
- Each functional component of the information processing device 10 may be realized by hardware that realizes each functional component (e.g., a hardwired electronic circuit, etc.), or may be realized by a combination of hardware and software (e.g., a combination of an electronic circuit and a program that controls it, etc.).
- each functional component of the information processing device 10 is realized by a combination of hardware and software.
- Computer 1000 has bus 1020, processor 1040, memory 1060, storage device 1080, input/output interface 1100, and network interface 1120.
- Bus 1020 is a data transmission path through which processor 1040, memory 1060, storage device 1080, input/output interface 1100, and network interface 1120 transmit and receive data to each other.
- Processor 1040 is one of various processors, such as a CPU (Central Processing Unit), a GPU (Graphics Processing Unit), or an FPGA (Field-Programmable Gate Array).
- Memory 1060 is a main storage device realized using a RAM (Random Access Memory) or the like.
- Storage device 1080 is an auxiliary storage device realized using a hard disk, SSD (Solid State Drive), memory card, or ROM (Read Only Memory), etc.
- a detector 20 for an image set consisting of a SAR image and a SAR image a detector 20 for an image set consisting of an optical image and an optical image, and a detector 20 for an image set consisting of a SAR image and an optical image are generated.
- the first update unit 150 inputs to the discriminator 250 an intermediate data set obtained using the first image set and an intermediate data set obtained using the second image set.
- the discriminator 250 has a function of discriminating whether or not each of the two or more intermediate data included in the intermediate data set is intermediate data obtained for different angle images. Then, the first update unit 150 updates the intermediate data generator 210 so that the discrimination result by the discriminator 250 becomes a predetermined result.
- Steps S301 to S303 are the same as steps S201 to S203, respectively, described with reference to FIG. 11.
- the discriminator 250 has the functions described in the second embodiment. Specifically, an example will be described in which the discriminator 250 outputs the likelihood that the intermediate data is intermediate data obtained for a different angle image as the discrimination result for each intermediate data.
- the functions of the discriminator 250 are not limited to this example.
- the correct answer generation unit 170 generates a correct answer determination result for each of the multiple images included in the acquired image set.
- an imaging angle is associated with each image.
- the correct answer generation unit 170 identifies the correct answer determination result based on the imaging angle.
- the correct answer generation unit 170 can identify the correct answer determination result based on the learned list and the imaging angle associated with each image.
- the second update unit 190 acquires the correct answer determination result from the correct answer generation unit 170.
- the second update unit 190 may also acquire the image set via the correct answer generation unit 170. That is, the second update unit 190 may acquire from the correct answer generation unit 170 the image set for which the correct answer generation unit 170 has generated the correct answer determination result.
- the information processing device 10 does not need to include the correct answer generation unit 170.
- the correct answer determination result may be associated with each image set in advance.
- the correct answer determination result may be associated with each image in advance.
- the second update unit 190 can obtain the correct answer determination result associated with each image.
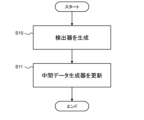
- step S20 is the same as step S10 according to at least one of the first embodiment and modification example 1.
- step S21 is performed after step S20.
- the second update unit 190 updates the discriminator 250.
- Step S21 is performed after step S22.
- Step S22 is the same as step S11 in at least one of the first embodiment, the first modified example, and the second embodiment. While FIG. 18 shows an example in which step S22 is performed after step S21, step S21 may also be performed after step S22. That is, the order in which steps S21 and S22 are performed is not particularly limited. Steps S21 and S22 may be performed in parallel.
- the second update unit 190 generates an intermediate data set by inputting the acquired image set to the intermediate data generator 210 (step S402).
- the second update unit 190 can read and use multiple parameters for configuring the intermediate data generator 210 from the detector storage unit 303.
- the second update unit 190 may obtain the intermediate data set generated by the first update unit 150 in step S202.
- step S403 the second update unit 190 performs discrimination by inputting the intermediate data set to the discriminator 250.
- a discrimination result is obtained as the output of the discriminator 250.
- the second update unit 190 may obtain the discrimination result generated by the first update unit 150 in step S203.
- the second update unit 190 updates the discriminator 250 so as to reduce the loss Lc. This improves the discrimination accuracy of the discriminator 250.
- adversarial learning can be performed between the learning of the intermediate data generator 210 and the learning of the discriminator 250.
- the discrimination accuracy of the discriminator 250 improves, the learning of the intermediate data generator 210 by the first update unit 150 also progresses further. Therefore, a detector 20 is realized that can more stably perform difference detection for images at different angles.
- the second update unit 190 may also repeatedly update the discriminator 250 using multiple image sets in one step S21.
- the update of the discriminator 250 is repeated, for example, until a termination condition is satisfied.
- the termination condition is, for example, at least one of the number of updates in step S21 being equal to or greater than a predetermined number and the loss Lc being equal to or less than a predetermined standard.
- each update of the classifier 250 may be performed by batch processing using two or more image sets.
- a single loss Lc may be calculated using multiple comparison results between the classification result and the correct classification result.
- the number of updates of the discriminator 250 in step S21 is the same as the number of updates of the intermediate data generator 210 in step S22.
- the first update unit 150 updates the intermediate data generator 210 every time the second update unit 190 updates the discriminator 250.
- the first update unit 150 determines whether or not a termination condition is satisfied (step S23).
- the termination condition is, for example, that the number of times step S22 is executed is equal to or greater than a predetermined number of times. If the termination condition is satisfied (Yes in step S23), the processing of the information processing device 10 is terminated.
- step S24 the generation unit 130 updates the detector 20 (step S24).
- the method in which the generation unit 130 updates the detector 20 in step S24 is the same as the method in which the generation unit 130 updates the detector 20 in step S20. However, in step S24, the generation unit 130 further updates the detector 20, including the intermediate data generator 210 updated by the first update unit 150.
- the hardware configuration of the computer that realizes the information processing device 10 according to this embodiment is shown, for example, in FIG. 14, similar to the information processing device 10.
- the storage device 1080 of the computer 1000 that realizes the information processing device 10 of this embodiment further stores program modules that realize the functions of the answer generation unit 170 and the second update unit 190 of this embodiment.
- the information processing device 10 further includes a second update unit 190 that updates the discriminator 250 using an intermediate data set and a correct answer discrimination result for the intermediate data set. Therefore, a detector 20 that can more stably perform difference detection for images at different angles is realized.
- the imaging conditions include, for example, one or more of the imaging angle, the direction of incidence of the sun at the time of imaging, the imaging time, the position of the satellite that captured the image, and the direction of the antenna used for imaging. Of these, it is preferable that the imaging conditions include the imaging angle. Furthermore, if the images included in the image set are optical images, it is preferable that the imaging conditions for the images include the direction of incidence of the sun at the time of imaging.
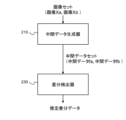
- the intermediate data generator 210 like the intermediate data generator 210 according to the first embodiment, outputs an intermediate data set consisting of intermediate data fa corresponding to image Xa and intermediate data fb corresponding to image Xb. According to the intermediate data generator 210 according to this embodiment, an intermediate data set is generated based not only on the image set but also on the imaging conditions. This enables more accurate feature extraction, improving the difference detection accuracy of the detector 20.
- image Xa, image Xb, the imaging angle ⁇ a of image Xa, and the imaging angle ⁇ b of image Xb are input to the intermediate data generator 210.
- the intermediate data generator 210 then outputs intermediate data fa for image Xa and intermediate data fb for image Xb.
- information indicating the imaging conditions of all images included in the image set does not necessarily have to be input to the intermediate data generator 210.
- Information indicating the imaging conditions of only some of the two or more images included in the image set may be input to the intermediate data generator 210.
- each functional component of the information processing device 10 can further acquire information indicating the imaging conditions of the images in a manner similar to that for acquiring the image set.
- the first image set storage unit 301 stores, in addition to the first image set, information indicating the imaging conditions of each of the two or more images included in the first image set.
- the second image set storage unit 302 stores, in addition to the second image set, information indicating the imaging conditions of each of the two or more images included in the second image set.
- the generation unit 130 generates the detector 20 by further using information indicating the imaging conditions of each of the two or more images included in the first image set. Therefore, the difference detection accuracy of the detector 20 is improved.
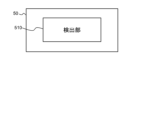
- the detection device 50 includes a detection unit 510.
- the detection unit 510 detects a difference between two or more images using an intermediate data generator 210 and a difference detector 230.
- the intermediate data generator 210 is updated by a first update unit 150 included in the information processing device 10 according to at least any one of the first embodiment to the fourth embodiment and the first modified example.
- FIG. 22 is a diagram showing an overview of the detection method according to this embodiment.
- the detection method according to this embodiment is executed by one or more computers.
- one or more computers detect differences between two or more images using an intermediate data generator 210 and a difference detector 230 (step S50).
- the intermediate data generator 210 has been updated by an information processing method according to at least any one of the first to fourth embodiments and modified example 1.
- the detection device 50 is a device that detects differences between images using a trained detector 20 that has been trained by the information processing device 10.
- the detection unit 510 acquires an image set.
- the image set acquired by the detection unit 510 is called a target image set.
- the target image set is similar to the image set described in the first embodiment.
- the target image set may or may not include images from different angles.
- the target image set may or may not include images obtained at the same imaging angle as the images included in the second image set.
- the target image set may include images obtained at a different imaging angle from any of the images included in the first image set and any of the images included in the second image set.
- the detection unit 510 inputs the target image set to the detector 20.
- the detector 20 includes an intermediate data generator 210 and a difference detector 230.
- the detection unit 510 can read and use the intermediate data generator 210 and difference detector 230 stored in, for example, the detector storage unit 303.
- the detection unit 510 may select a detector 20 to be used based on the type of image included in the target image set. For example, each image may be associated with information indicating the type of image (SAR image, optical image, etc.). Alternatively, the user may input information to the detection device 50 indicating which detector 20 should be used. The detection unit 510 can select a detector 20 based on the input information.
- the detection unit 510 obtains an intermediate dataset corresponding to the target image set by inputting the target image set to the intermediate data generator 210. Next, the detection unit 510 inputs the intermediate dataset to the difference detector 230. Note that the output data of the intermediate data generator 210 may be automatically input to the difference detector 230.
- the difference detector 230 outputs estimated difference data.
- the estimated difference data is data that indicates the difference between two or more images included in the target image set.
- the detection unit 510 further acquires information indicating the imaging conditions of the images included in the target image set. The detection unit 510 then inputs further information indicating the imaging conditions to the intermediate data generator 210, thereby obtaining an intermediate data set.
- the first update means is the intermediate data set obtained using the first image set and the intermediate data set obtained using the second image set are input to a discriminator that discriminates whether the intermediate data set is the intermediate data set obtained from the image set including the different angle image; An information processing device that updates the intermediate data generator so that the discrimination result by the discriminator becomes a predetermined result.
- the one or more computers the intermediate data set obtained using the first image set and the intermediate data set obtained using the second image set are input to a discriminator that discriminates whether each of the two or more intermediate data included in the intermediate data set is the intermediate data obtained for the different angle images;
- the information processing method includes updating the intermediate data generator so that the discrimination result by the discriminator becomes a predetermined result. 3-4.
- the one or more computers further update the classifier using the intermediate data set and a correct classification result for the intermediate data set.
- An information processing method, wherein each of the two or more images is a satellite image. 3-6.
- a generating means for generating, using a first set of images, a detector including an intermediate data generator that receives an input of an image set including two or more images and generates an intermediate data set including two or more intermediate data, and a difference detector that detects a difference between the two or more images using the intermediate data set; and a first updating means for inputting a second set of images to the intermediate data generator to generate the intermediate data set corresponding to the second set of images, and updating the intermediate data generator using the intermediate data set;
- the second image set includes a different-angle image obtained at an imaging angle different from any of the two or more images included in the first image set.
- the generation means is a program that generates the detector by further using information indicating imaging conditions of each of the two or more images included in the first image set. 5-8.
- the imaging conditions include an imaging angle. 5-9.
- the detector is a program that detects differences relating to a target object between the two or more images included in the input image set. 5-10.
- a program in which the two or more images included in the image set all include a target area in an imaging area. 6-1.
- Computer A program for causing the intermediate data generator updated by the information processing method according to any one of 3-1. to 3-10.
Landscapes
- Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Multimedia (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Evolutionary Computation (AREA)
- Artificial Intelligence (AREA)
- Health & Medical Sciences (AREA)
- Computing Systems (AREA)
- Databases & Information Systems (AREA)
- General Health & Medical Sciences (AREA)
- Medical Informatics (AREA)
- Software Systems (AREA)
- Image Analysis (AREA)
- Image Processing (AREA)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2024567374A JP7845509B2 (ja) | 2022-12-28 | 2023-12-06 | 情報処理装置、検出装置、情報処理方法、およびプログラム |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2022-212492 | 2022-12-28 | ||
| JP2022212492 | 2022-12-28 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2024142804A1 true WO2024142804A1 (ja) | 2024-07-04 |
Family
ID=91717261
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2023/043592 Ceased WO2024142804A1 (ja) | 2022-12-28 | 2023-12-06 | 情報処理装置、検出装置、情報処理方法、および記録媒体 |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP7845509B2 (https=) |
| WO (1) | WO2024142804A1 (https=) |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013214155A (ja) * | 2012-03-30 | 2013-10-17 | Fujitsu Ltd | 画像処理装置、画像処理方法および画像処理プログラム |
| JP2021082068A (ja) * | 2019-11-20 | 2021-05-27 | キヤノン株式会社 | 情報処理装置、情報処理方法、及びプログラム |
| WO2022018791A1 (ja) * | 2020-07-20 | 2022-01-27 | 日本電気株式会社 | 画像処理装置および画像処理方法 |
-
2023
- 2023-12-06 WO PCT/JP2023/043592 patent/WO2024142804A1/ja not_active Ceased
- 2023-12-06 JP JP2024567374A patent/JP7845509B2/ja active Active
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2013214155A (ja) * | 2012-03-30 | 2013-10-17 | Fujitsu Ltd | 画像処理装置、画像処理方法および画像処理プログラム |
| JP2021082068A (ja) * | 2019-11-20 | 2021-05-27 | キヤノン株式会社 | 情報処理装置、情報処理方法、及びプログラム |
| WO2022018791A1 (ja) * | 2020-07-20 | 2022-01-27 | 日本電気株式会社 | 画像処理装置および画像処理方法 |
Also Published As
| Publication number | Publication date |
|---|---|
| JP7845509B2 (ja) | 2026-04-14 |
| JPWO2024142804A1 (https=) | 2024-07-04 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| Shen et al. | BBAS: Towards large scale effective ensemble adversarial attacks against deep neural network learning | |
| CN113205142B (zh) | 一种基于增量学习的目标检测方法和装置 | |
| JP7096365B2 (ja) | 目標検出および目標検出ネットワークのトレーニング | |
| CN113128564B (zh) | 一种基于深度学习的复杂背景下典型目标检测方法及系统 | |
| CN116452818B (zh) | 一种基于特征增强的小样本遥感图像目标检测方法 | |
| JP5214716B2 (ja) | 識別装置 | |
| US20180025249A1 (en) | Object Detection System and Object Detection Method | |
| CN114565824B (zh) | 基于全卷积网络的单阶段旋转舰船检测方法 | |
| CN108280455B (zh) | 人体关键点检测方法和装置、电子设备、程序和介质 | |
| CN115578633B (zh) | 基于尺度感知域适应的多分辨率sar目标识别方法及装置 | |
| Nordeng et al. | DEBC detection with deep learning | |
| CN114445700B (zh) | 一种面向不平衡sar图像数据的证据融合目标识别方法 | |
| CN109671055B (zh) | 肺结节检测方法及装置 | |
| Ying et al. | Multi‐granularity feature enhancement network for maritime ship detection | |
| Liu et al. | AARN: Anchor‐guided attention refinement network for inshore ship detection | |
| CN117541541A (zh) | 基于跨级特征融合的多尺度船舶旋转检测方法 | |
| CN116720151B (zh) | 基于人工智能的脉冲星搜索方法、装置以及设备 | |
| Shi et al. | SDNet: Image‐based sonar detection network for multi‐scale objects | |
| WO2024142804A1 (ja) | 情報処理装置、検出装置、情報処理方法、および記録媒体 | |
| CN118470565B (zh) | 一种无人机航拍图像的目标检测方法、装置及无人机系统 | |
| KR20230065125A (ko) | 기계 학습 모델의 트레이닝 방법 및 전자 장치 | |
| CN114841983A (zh) | 一种基于决策分数的图像对抗样本检测方法和系统 | |
| CN119648985A (zh) | 一种基于双路径结构的无监督域适应目标检测方法及系统 | |
| CN119478718A (zh) | 基于全局信息融合的多尺度方向感知sar目标检测方法 | |
| US20250086974A1 (en) | Learning apparatus, learning method, and tracking apparatus |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 23911585 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2024567374 Country of ref document: JP |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 23911585 Country of ref document: EP Kind code of ref document: A1 |