WO2024135223A1 - Robot and gripping unit - Google Patents
Robot and gripping unit Download PDFInfo
- Publication number
- WO2024135223A1 WO2024135223A1 PCT/JP2023/042168 JP2023042168W WO2024135223A1 WO 2024135223 A1 WO2024135223 A1 WO 2024135223A1 JP 2023042168 W JP2023042168 W JP 2023042168W WO 2024135223 A1 WO2024135223 A1 WO 2024135223A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- arm
- gripping
- unit
- attached
- robot
- Prior art date
Links
- 210000000078 claw Anatomy 0.000 claims description 61
- 238000003384 imaging method Methods 0.000 description 19
- 238000010586 diagram Methods 0.000 description 16
- 230000004308 accommodation Effects 0.000 description 2
- 238000001179 sorption measurement Methods 0.000 description 2
- 239000000853 adhesive Substances 0.000 description 1
- 230000001070 adhesive effect Effects 0.000 description 1
- 235000013361 beverage Nutrition 0.000 description 1
- 230000007423 decrease Effects 0.000 description 1
- 239000013013 elastic material Substances 0.000 description 1
- 230000002452 interceptive effect Effects 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
Images












Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J5/00—Manipulators mounted on wheels or on carriages
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J9/00—Programme-controlled manipulators
- B25J9/06—Programme-controlled manipulators characterised by multi-articulated arms
Definitions
- the present invention relates to a robot and a gripping unit.
- a system that includes an automated guided vehicle (AGV), a loading platform on the AGV that is configured and sized to hold two or more storage containers, a frame extending from the AGV, and a robotic arm mounted on the frame.
- AGV automated guided vehicle
- a loading platform on the AGV that is configured and sized to hold two or more storage containers
- a frame extending from the AGV
- a robotic arm mounted on the frame.
- the robot arm has a high degree of freedom that makes it easy to pick up and place products using the AGV, improving work efficiency without the involvement of employees.
- the present invention has been made to solve the above problems, and aims to provide a robot that can smoothly pick and place products even in a small work space, and can grasp large items such as cases and carry a large amount of cargo.
- the robot according to the present invention which solves the above problems, comprises a cart with a running function, a pillar section having a pair of pillars extending vertically from the cart and a connecting section connecting the upper ends of the pair of pillars, and an arm section movably attached along the extension direction of the pillars, the arm section comprising a base end movably attached to the pillars, a first arm section rotatably attached to the base end via a first joint section, a second arm section rotatably attached to the first arm section via a second joint section, and a third arm section rotatably attached to the second arm section via a third joint section, the third arm section having a gripping section for gripping an object.
- the gripping unit according to the present invention is a gripping unit for gripping an object, and has a gripping unit main body and a pair of gripping claws that are attached to the gripping unit main body via a rotation shaft so as to be rotatable independently of each other, and the gripping claws are provided with an attachment/detachment means for attaching and detaching the object.
- the robot of the present invention only a small portion of the arm protrudes outside the vehicle body during operation, making it possible to work efficiently in a small space.
- the arm is attached to the pillar of the gatepost, the entire space above the cart can be used as a loading platform.
- FIG. 1 is a perspective view of a robot according to an embodiment of the present invention.
- FIG. 2 is an enlarged view showing an arm of the robot according to the embodiment of the present invention.
- 1A to 1D are diagrams showing the movement of the arm of a robot according to an embodiment of the present invention, in which (a) is a stored state, (b) is a front state, (c) is a down state, and (d) is an up state.
- FIG. 2 is a diagram showing a state in which a load is placed on the robot according to the embodiment of the present invention.
- FIG. 11 is a diagram for explaining the operation of the robot according to the embodiment of the present invention, showing a state in which the robot is holding a case placed on the ground.
- FIG. 11 is a diagram for explaining the operation of the robot according to the embodiment of the present invention, showing a state in which the robot is holding a case.
- FIG. 11 is a diagram for explaining the operation of the robot according to the embodiment of the present invention, showing the operation of displaying products on a product shelf.
- FIG. 13 is a perspective view showing a modified example of the gripping portion of the robot according to the embodiment of the present invention.
- FIG. 13 is a front view showing a modified example of the gripping portion of the robot according to the embodiment of the present invention.
- FIG. 13 is a side view showing a modified example of the gripping portion of the robot according to the embodiment of the present invention.
- FIG. 13 is a bottom perspective view showing a modified example of the gripping portion of the robot according to the embodiment of the present invention.
- FIG. 10 is a cross-sectional view taken along line AA in FIG. 1A and 1B are diagrams showing the operation of a modified gripping unit of a robot according to an embodiment of the present invention, in which (a) shows a state in which a gripping object having a round cross section is gripped, (b) shows a state in which a flat gripping object is gripped from above, and (c) shows a state in which a flat gripping object is gripped.
- FIG. 1 is an oblique view of a robot according to an embodiment of the present invention
- FIG. 2 is an enlarged view showing the arm of a robot according to an embodiment of the present invention
- FIG. 3 is a diagram showing the movement of the arm of a robot according to an embodiment of the present invention, where (a) is a diagram showing a stored state, (b) is a diagram showing a front state, (c) is a diagram showing a down state, and (d) is a diagram showing an up state
- FIG. 4 is a diagram showing a robot according to an embodiment of the present invention with luggage placed thereon
- FIG. 1 is an oblique view of a robot according to an embodiment of the present invention
- FIG. 2 is an enlarged view showing the arm of a robot according to an embodiment of the present invention
- FIG. 3 is a diagram showing the movement of the arm of a robot according to an embodiment of the present invention, where (a) is a diagram showing a stored state, (b) is a diagram showing a
- FIG. 5 is a diagram explaining the operation of a robot according to an embodiment of the present invention, showing a state in which it is holding a case placed on the ground
- FIG. 6 is a diagram explaining the operation of a robot according to an embodiment of the present invention, showing a state in which it is holding a case
- FIG. 7 is a diagram explaining the operation of a robot according to an embodiment of the present invention.
- FIG. 8 is a perspective view showing a modified gripping part of a robot according to an embodiment of the present invention
- FIG. 9 is a front view showing a modified gripping part of a robot according to an embodiment of the present invention
- FIG. 10 is a side view showing a modified gripping part of a robot according to an embodiment of the present invention
- FIG. 8 is a perspective view showing a modified gripping part of a robot according to an embodiment of the present invention
- FIG. 9 is a front view showing a modified gripping part of a robot according to an embodiment of the present invention
- FIG. 10 is a
- FIG. 11 is a perspective view from the bottom showing a modified gripping part of a robot according to an embodiment of the present invention
- FIG. 12 is a cross-sectional view taken along line A-A in FIG. 9
- FIG. 13 is a diagram showing the operation of a modified gripping part of a robot according to an embodiment of the present invention, where (a) shows a state in which a gripping object having a round cross section is gripped, (b) shows a state in which a gripping object having a flat shape is gripped from above, and (c) shows a state in which a gripping object having a flat shape is gripped.
- the front-rear and up-down directions are defined as the directions of the arrows shown in FIG. 1
- the roll direction, pitch direction, and yaw direction are defined as the directions of rotation around the roll axis, pitch axis, and yaw axis shown in FIG. 2.
- the robot 1 includes a cart 10 with a running function, a gatepost 20 having a pair of pillars 21, 21 extending vertically from the cart 10 and a connecting portion 22 connecting the upper ends of the pair of pillars 21, 21, and a pair of arms 30 assembled so as to be movable along the extending direction of the pillars 21.
- the cart unit 10 has multiple wheels 11 and is configured to be self-propelled by a running device having a drive motor, control device, braking device, etc. (not shown).
- the robot 1 in this embodiment is self-propelled by the cart unit 10, and can move by itself to a position up to a product shelf where products are to be replenished or within a warehouse where products are stocked.
- the cart section 10 has a flat box-shaped cart body 12, which houses the drive motor, control device, braking device, and the like.
- the top surface 13 of the cart body 12 is formed flat and can be used as a loading space on which products and cases can be placed.
- a gatepost 20 stands vertically (up and down) at the rear corner of the top surface 13 of the cart body 12.
- the gatepost 20 is formed in a gate shape with a pair of pillars 21, 21 standing vertically from the top surface 13 of the cart body 12 and a connecting portion 22 that connects the upper ends of the pillars 21, 21 to each other.
- the arm 30 (first arm member 30a, second arm member 30b) described below is attached to the front side of the pillar 21.
- the pillar 21 is equipped with a movement mechanism (not shown), and the arm 30 is assembled so that it can be moved in the vertical direction of the pillar 21 by this movement mechanism.
- the movement mechanism can use various conventionally known configurations as long as it can move the arm 30 along the vertical direction of the pillar 21, but it is preferable for it to be configured, for example, by a drive motor and a circular belt member that can be rotated by the drive motor.
- flanges 23 are formed on the opposing side surfaces of the pillars 21, protruding from one pillar 21 toward the other pillar 21 at a specified interval.
- the length of the flanges 23 along the opposing direction is formed to be sufficient to hold the case on the flanges 23 between the pillars 21, and a specified gap is formed between the flanges 23.
- the connecting part 22 is provided with a first imaging unit 40 in approximately the center.
- the first imaging unit 40 can be any of various conventionally known cameras.
- the first imaging unit 40 can capture an image in front of the robot 1 according to this embodiment.
- a spherical camera capable of 360° imaging is preferably used as the first imaging unit 40.
- the arm portion 30 has a first arm member 30a and a second arm member 30b that are respectively attached to a pair of pillar portions 21, 21. Since the first arm member 30a and the second arm member 30b are members each having a similar configuration, the following explanation will focus on the first arm member 30a, and a detailed explanation of the second arm member 30b will be omitted.
- the first arm member 30a comprises a base end 31 movably attached to the pillar portion 21, a first arm portion 33 rotatably attached to the tip of the base end 31 via a first joint portion 32, a second arm portion 35 rotatably attached to the tip of the first arm portion 33 via a second joint portion 34, and a third arm portion 37 rotatably attached to the tip of the second arm portion 35 via a third joint portion 36, and the tip of the third arm portion 37 comprises a grip portion 39 rotatably attached to the tip of the third arm portion 37 via a fourth joint portion 38.
- the base end 31 is attached to the column 21 at its base end so as to be movable up and down, and the first joint 32 is attached above the tip end.
- the base end of the first joint 32 is attached to the base end 31 so as to be rotatable in the yaw direction a, and the tip end has a first arm 33 attached thereto so as to be rotatable in the pitch direction b via a first shaft 32a.
- the first joint 32 rotates in the yaw direction a and pitch direction b described above by a motor (not shown).
- the first arm 33 and the second arm 35 are long box-shaped members of roughly the same shape, with a first axis 32a and a second axis 34a, and a third axis 34b and a fourth axis 36a formed at both ends of each.
- the tip side of the first arm 33 and the base side of the second arm 35 are attached to the second joint 34, and are attached so as to be freely rotatable in the pitch direction b via the second axis 34a and the third axis 34b.
- the third arm 37 is a long box-shaped member similar to the first arm 33 and the second arm 35, but the base end forms a curved portion that curves upward, and the third joint 36, which has a shape similar to the first joint 32 described above, is attached to the upper surface of the curved portion.
- the base end of the third joint 36 is attached to the second arm 35 via the fourth shaft 36a so as to be rotatable in the pitch direction b, and the tip end is assembled to the third arm 37 so as to be rotatable in the yaw direction a.
- a second imaging unit 41 (for the second arm member 30b, a third imaging unit 42) is attached to the side of the curved portion of the third arm 37.
- the second imaging unit 41 is attached detachably and can be attached to any position on the arm 30, not just the side of the curved portion.
- a holding surface 50 is formed on the opposing surfaces of the first arm member 30a and the second arm member 30b of the third arm portion 37.
- the holding surface 50 is a portion used when the first arm member 30a and the second arm member 30b hold a case or the like as described below, and it is preferable that a slit shape is formed in the holding surface 50 or that an elastic material is attached to prevent the case or the like from falling out.
- a gripper 39 is attached to the tip of the third arm 37 via a fourth joint 38.
- the base end of the fourth joint 38 is attached to the tip of the third arm 37 so as to be rotatable in the roll direction c, and the tip is attached to the gripper 39 via a fifth shaft 38a so as to be rotatable in the pitch direction b.
- the gripper 39 is also attached to the sixth shaft 38b so as to be rotatable in the yaw direction a.
- the gripping section 39 has a pair of gripping claws 61, 61 that rotate around the base end, and the tip ends are assembled so that they can move toward or away from each other.
- the tips of the gripping claws 61 can be rotated in a direction that brings them closer together to grip a product or other object to be gripped, and can be rotated in a direction that moves them away from each other to release the gripped object.
- the arm 30 When the arm 30 is configured in this manner and moved around a warehouse or on a product shelf, the first arm 33 and the second arm 35 are brought close to each other as shown in FIG. 3(a) and arranged so as to be approximately parallel to the pillar 21, so that the arm 30 can be stored compactly without protruding far from the robot 1.
- the first arm 33 and the second arm 35 are extended to the front position horizontal to the ground, making it easier to take out a product that is far away. If the product is located in a high or low position, the height of the base end 31 of the arm 30 can be adjusted along the pillar 21, and the first arm 33 and the second arm 35 can be arranged to cross each other as shown in FIG. 3(c) or FIG. 3(d), making it possible to easily take out the product.
- the load on the root axis of each of the first to third arms 33, 35, and 37 can be reduced because of the structure using the parallel links vertically.
- top surface 13 of the cart 10 is formed as a flat loading surface, it is possible to stack cases B and the like on the cart 10 for transport, as shown in Figure 4, and the space between the pillars 21, 21 of the gatepost 20 can also be used as loading space.
- the pillars 21 are formed with flanges 23, so that trays T, cases B, etc. can be placed between the pillars 21 as shown in FIG. 5.
- the robot 1 according to this embodiment does not have shelves or the like between the pillars 21, 21, it is possible for the first imaging unit 40 attached to the connecting portion 22 of the gatepost 20 to clearly capture images of the placement surface of the upper surface 13 of the cart 10 and the state of the trays T and cases B held between the flanges 23.
- the robot 1 is provided with a first arm member 30a and a second arm member 30b on each of the pillars 21, 21, and these first arm member 30a and second arm member 30b can move in the up-down and back-forth directions independently of each other, so that the range of tasks that can be performed can be expanded, such as by handling different products at the same time.
- the arms 30 of the robot 1 according to this embodiment are formed with holding surfaces 50, so that the case can be held and lifted by the holding surfaces 50 of the first arm member 30a and the second arm member 30b, as shown in Figures 5 and 6.
- the cart unit 10 is driven to move the robot 1 according to this embodiment to the vicinity of case B to be grasped.
- an image of case B to be grasped is taken by the first imaging unit 40, and the image data is subjected to image processing, etc., and the robot 1 is moved to the position of case B.
- the cart 10 is moved close to case B, and the arm 30 is extended, for example to the front state shown in FIG. 3(b).
- the base end 31 of the arm 30 is moved below the pillar 21 to a height where the third arm 37 of the arm 30 can embrace the side of case B.
- case B both sides of case B are sandwiched between the holding surfaces 50, 50 of the pair of arms 30.
- case B can be held more securely.
- the base end 31 of the arm 30 is raised along the pillar 21, so that the case B can be lifted, and the case B can be placed on the upper surface 13 of the cart 10 or on the flange 23 formed on the pillar 21 for transport.
- the arm unit 30 can be stored between the product shelves 60 as shown in FIG. 3(a), allowing the robot 1 according to this embodiment to move without interfering with the product shelves 60. After moving to the desired product shelf 60 position, the transported product G is displayed in a designated location on the product shelf 60.
- the first arm member 30a and the second arm member 30b can operate independently of each other, so that, as shown in FIG. 7, the first arm member 30a can display products on the upper level of the product shelf 60, and the second arm member 30b can simultaneously display products on the lower level.
- the first arm 33 and the second arm 35 can be stored and the third joint 36 can be rotated in the yaw direction a to display the products G.
- the gripping portion 39 is attached to the third arm 37 so as to be rotatable in the roll direction, pitch direction, and yaw direction, so that the products G can be freely displayed in any desired position.
- first arm member 30a and the second arm member 30b are equipped with the second imaging unit 41 and the third imaging unit 42, respectively, so that the first arm member 30a and the second arm member 30b can perform image processing independently, making it possible to display the products G more efficiently.
- the gripping portion 39 is described as having a pair of gripping claws 61, 61 that rotate around the base end and are assembled so that the tip end can move toward and away from each other. Below, however, modified examples of the gripping portion are described.
- the gripper 70 has a gripper body 71 and a pair of gripping claws 72a, 72b attached to the tip of the gripper body 71.
- the gripper body 71 is configured so that it can be attached to the fourth joint 38 via an attachment part (not shown) on the base end side.
- the gripper body 71 also has a storage recess 79 formed therein to prevent interference between the gripper body 71 and the second gripping claw 72b when the second gripping claw 72b described below rotates toward the base end side of the gripper body 71.
- a pair of inlets 121 are formed on the side of the gripper body 71 to connect to a supply port 120 described below.
- the pair of gripping claws 72a, 72b are rotatably attached to each other via a rotating shaft 73 of a claw drive motor 100 attached to the tip side of the gripper body 71.
- the claw drive motors 100 are provided corresponding to the pair of gripping claws 72a, 72b, respectively, and the rotating shafts 73 are arranged coaxially with each other.
- the first gripping claw 72a has a pivot hole 74 formed at its base end through which the pivot shaft 73 described above passes, and has an attachment/detachment means 80 attached to its tip end via a biasing means 90 described below.
- the first gripping claw 72a has a side wall 78 in which a pivot hole 74 is formed to be attached to the pivot shaft 73 of the claw drive motor 100, and a wall portion 77 extending in the width direction of the gripper body 71 from the tip of the side wall 78.
- a guide arm portion 110 that rotates coaxially with the pivot shaft 73, and the guide arm portion 110 is disposed approximately parallel to the side wall 78.
- the side wall 78 is formed with a long guide hole 76 that guides a supply port 120 that supplies negative pressure to the attachment/detachment means 80 described below, and a side piece 78a that extends approximately parallel to the side wall 78 is formed at the end of the wall portion 77 opposite the side wall 78, and a guide groove 75 that guides the attachment/detachment means 80 is formed in the side piece 78a.
- an attachment/detachment means 80 is attached to the inside surrounded by the wall portion 77, side wall 78, and side piece 78a of the first gripping claw 72a.
- the attachment/detachment means 80 is attached so as to be movable in the extension direction of the guide groove 75 and the guide hole 76.
- the attachment/detachment means 80 comprises an attachment/detachment means main body 81 that communicates with the supply port 120, and an attachment/detachment part 82 attached to the attachment/detachment means main body 81.
- the attachment/detachment means main body 81 is formed to be hollow inside, and by having this hollow internal passage, air can be sucked from the supply port 120 by a negative pressure pump 123 (described later) to generate negative pressure in the attachment/detachment part 82.
- the attachment/detachment part 82 is preferably a rubber member formed in a suction cup shape, and can be attached to the object to be grasped by the negative pressure, thereby adsorbing the object to the gripping claws 72a, 72b.
- multiple attachment/detachment sections 82 are formed along the width direction of the gripping claws 72a, 72b, and in this modified example, two attachment/detachment sections 82 are arranged for each of the gripping claws 72a, 72b. Furthermore, as shown in FIG. 8, an engagement protrusion 83 that engages with the guide groove 75 is formed on the surface of the attachment/detachment means main body 81 facing the side piece 78a.
- the attachment/detachment means 80 is held by a guide arm 110 at approximately the center in the width direction of the attachment/detachment means main body 81.
- a biasing means 90 is provided adjacent to the guide arm 110.
- the guide arm 110 has a guide arm base 111 that rotates coaxially with the rotation shaft 73 at the end opposite the rotation shaft 73 of the claw drive motor 100, a guide arm end 113 that engages with the attachment/detachment means main body 81, and a guide arm main body 112 that connects the guide arm base 111 and the guide arm end 113.
- a roughly U-shaped guide portion 114 is formed at the end 113 of the guide arm, and the attachment/detachment means main body 81 is attached so that it can move toward the opening of the guide portion 114 by engaging with the guide portion 114.
- the biasing means 90 arranged close to the guide arm 110 has an elastic member 91 that biases the detachment means main body 81 in the direction opposite to the direction toward the opening of the guide portion 114 described above. It is preferable that a pair of elastic members 91 are provided to sandwich the center of the detachment portion 82. By biasing the detachment means 80 in this way with a pair of elastic members 91, the orientation of the detachment portion 82 can be rotated a certain angle in the vertical direction in FIG. 12 according to the shape and orientation of the object to be grasped.
- the gripping unit 70 of this modified example is arranged so that the attachment/detachment means 80 can be moved by the biasing means 90 in the direction in which the attachment/detachment part 82 attaches and detaches the object to be gripped.
- This makes it possible to adjust the orientation of the attachment/detachment part 82 to an appropriate direction depending on the shape of the object to be gripped, thereby enabling proper gripping of the object to be gripped.
- a valve 122 is attached inside the gripper body 71, and the valve 122 can connect the negative pressure pump 123 to the inlet 121 and the supply port 120, or can release this connection.
- the valve 122 is arranged so that it can be opened and closed by a control unit (not shown). This makes it possible to select whether or not to generate the negative pressure generated by the negative pressure pump 123 in the detachable part 82.
- the operation of the gripping unit 70 according to this modified example will be described.
- the first gripping claw 72a and the second gripping claw 72b are rotated so that they are horizontal to the gripping unit main body 71, forming the gripping unit 70 in a flat shape.
- the second gripping claw 72b is accommodated in the accommodation recess 79 of the gripping unit main body 71, thereby preventing interference between the second gripping claw 72b and the gripping unit main body 71 and allowing the second gripping claw 72b to be rotated to a position horizontal to the gripping unit main body 71.
- the gripping part 70 By making the gripping part 70 flat in this way, it is possible to insert the gripping part 70 into a vertically narrow space such as a shelf board, and handle an object to be gripped that is placed on the shelf board. At this time, the detachable part 82 is positioned facing downward, so that the object to be gripped can be held by the gripping part 70 by adsorbing it from above, as shown in FIG. 13(b).
- the gripping unit 70 when grasping a box-shaped object placed on a shelf, the gripping unit 70 is inserted between the shelf and the object, and the object is attracted to and held from above, making it easy to move the object placed on the shelf.
- the pivot shaft 73 is rotated to rotate the first gripping claw 72a and the second gripping claw 72b.
- the first gripping claw 72a is rotated toward the upper side of the gripping body 71, and the second gripping claw 72b is rotated largely so that it is positioned in front of the gripping body 71, so that the first gripping claw 72a and the second gripping claw 72b are arranged in a V-shape with respect to each other, as shown in FIG. 11.
- first gripping claw 72a and the second gripping claw 72b By arranging the first gripping claw 72a and the second gripping claw 72b in this manner, it becomes possible to grip an object having a round cross section, for example, as shown in FIG. 13(a). Specifically, it becomes possible to easily handle beverages stored in cans or plastic bottles. In this case, it is possible to grip cans or plastic bottles that are lined up on a shelf, and it is also possible to remove cans or plastic bottles stored in a storage box from the storage box.
- the first gripping claw 72a and the second gripping claw 72b can rotate independently of each other about the rotation axis 73, so that the first gripping claw 72a and the second gripping claw 72b can be rotated at any angle relative to the gripping unit main body 71.
- FIG. 13(c) it is also possible to arrange the first gripping claw 72a and the second gripping claw 72b so that their openings face downward relative to the gripping unit main body 71.
- FIG. 13(c) it is possible to grasp the corners of a box-shaped object to be grasped.
- the gap between the shelf and the object to be grasped as shown in FIG. 13(b) is too narrow for the grasping part 70 to insert, it is possible to handle the object to be grasped by gripping the corners of the object as if biting them.
- the gripping unit 70 of this modified example formed in this manner holds the object to be gripped by adsorption using the detachable part 82, so that the posture of the object to be gripped can be changed by rotating the fourth joint part on the base end side of the gripping unit 70, making it possible to flexibly handle the object to be gripped in a narrow area.
- the angle of the first gripping claw 72a and the second gripping claw 72b, as well as the angle and position of the detachable part 82, can be adjusted to match the shape of the object to be gripped, making it possible to handle a wide variety of objects to be gripped.
- first gripping claw 72a and the second gripping claw 72b can rotate independently of each other, in addition to holding the object by suction with the detachable part 82, it is also possible to hold the object by gripping with the first gripping claw 72a and the second gripping claw 72b.
- the attachment/detachment means 80 is attached to the inside surrounded by the wall portion 77, side wall 78, and side piece 78a of the first gripping claw 72a and the second gripping claw 72b, and the first gripping claw 72a and the second gripping claw 72b are hollow, so it is possible to miniaturize the gripping portion 70 itself, and by using it as part of the path of the pneumatic system, it is possible to reduce the number of parts.
- the robot 1 captures an image of the state of the product shelf 60 using the first imaging unit 40.
- the captured image data is processed by a control device (not shown) built into the trolley unit 10, and information on products that are missing from the product shelf 60 is calculated.
- the trolley unit 10 is then controlled to travel and move to the warehouse, and the necessary products are placed on the top surface of the trolley unit 10.
- the necessary products are captured by the second imaging unit 41 and the third imaging unit 42 attached to the first arm member 30a and the second arm member 30b, and the image data can be processed, so that the gripper 39 can be controlled more precisely in the pick-and-place operation.
- the arm unit 30 can move up and down along the pillar 21, and the first joint unit, the second joint unit, and the third joint unit can rotate freely in the pitch direction and the yaw direction, so that products can be replenished at any height of the product shelf.
- the robot 1 according to the present embodiment has been described above with the gripping section 39 at the tip of the arm 30, but the member attached to the tip of the arm 30 is not limited to the gripping section 39, and may be, for example, an adsorption section that can adsorb a product by suction of air or the like.
- a pair of arms 30 are provided on each of the pillars 21 of the gatepost 20, but the arms 30 may be provided on only one of the pillars 21, or multiple arms 30 may be attached to one pillar 21.
- the first imaging unit 40 has been described with a spherical camera, but the camera may be attached so that it can rotate up and down, for example.
- the gripping section 70 described in the modified example has been described with the negative pressure pump 123 generating negative pressure in the detachable section 82 to adsorb the object to be grasped, but the detachable section is not limited to this, and the object to be grasped may be held by, for example, a magnet, electromagnet, or adhesive. It is clear from the claims that such modifications or improvements are also included within the technical scope of the present invention.
Landscapes
- Engineering & Computer Science (AREA)
- Robotics (AREA)
- Mechanical Engineering (AREA)
- Manipulator (AREA)
Abstract
Provided is a robot capable of performing a product pick-and-place operation smoothly even in a confined work space, capable of gripping an object such as a case having a large volume, and capable of loading a large number of packages. This robot comprises a cart portion having a travel function, a portal portion including a pair of column portions extending in a vertical direction from the cart portion and a linking portion that links upper ends of the pair of column portions, and arm portions attached in such a way as to be capable of moving in an extension direction of the column portions, wherein: each arm portion comprises a base end portion assembled movably to the column portion, a first arm portion assembled rotatably to a distal end of the base end portion by way of a first joint portion, a second arm portion assembled rotatably to a distal end of the first arm portion by way of a second joint portion, and a third arm portion assembled rotatably to a distal end of the second arm portion by way of a third joint portion; and a gripping portion for gripping a target object is provided at a distal end of the third arm portion.
Description
本発明は、ロボット及び把持部に関する。
The present invention relates to a robot and a gripping unit.
近年、小売販売を行っているデパート、スーパーマーケット及びコンビニエンスストア並びに家電量販店などの店舗では、商品棚に種々の商品を陳列して販売を行っている。消費者は、この商品棚から希望する商品を手に取って商品を購入する。このように消費者が商品を購入することで商品棚に陳列された商品が減少するため、必要に応じて商品棚に商品を補充する必要がある。
In recent years, department stores, supermarkets, convenience stores, and electronics retailers that sell a wide variety of products display various products on shelves for sale. Consumers pick up the products they want from these shelves and purchase them. As consumers purchase products in this way, the number of products displayed on the shelves decreases, and it is necessary to replenish the shelves with products as necessary.
このような商品の補充作業は、店舗の従業員による手作業で行われていたが、近年では、従業員の関与なく商品が在庫されている倉庫や商品棚との間を自走して商品を商品棚に陳列する作業用の無人搬送車などが用いられるようになってきた。
This type of stock-replenishment work used to be done manually by store employees, but in recent years, automated guided vehicles have come into use, which travel between the warehouse and the shelves to stock products without the involvement of employees and then place the products on the shelves.
このような作業用の無人搬送車は、種々の形態が知られているが、例えば、特許文献1に記載されているように、無人搬送車(AGV)と、2つ以上の保管容器を保持するように構成およびサイズ決定される、前記AGV上にある載荷台と、前記AGVから延在するフレームと、前記フレームに設置されるロボットアームとを備えるシステムが知られている。
Various configurations of automated guided vehicles for such work are known, but for example, as described in Patent Document 1, a system is known that includes an automated guided vehicle (AGV), a loading platform on the AGV that is configured and sized to hold two or more storage containers, a frame extending from the AGV, and a robotic arm mounted on the frame.
このようなシステムによれば、ロボットアームがAGVを用いての商品の取出しや載置を容易にする高い自由度を有しており、従業員が関与することなく、作業効率を向上させることができる。
In this type of system, the robot arm has a high degree of freedom that makes it easy to pick up and place products using the AGV, improving work efficiency without the involvement of employees.
しかし、商品棚近傍や倉庫は、通常商品棚の間隔が必要以上に広く設けられておらず、倉庫内には商品が多数置かれているため、作業用の十分なスペースがあるとはいえない。しかしながら、従来のシステムは、商品の取り扱いを容易にするために、ロボットアームが無人搬送車から外方に突き出していることから、このような狭いスペースで商品を取り出したり、商品棚へ陳列するピック&プレイス作業を行うことは難しいという問題があった。また、従来のシステムは、載荷台に大きな荷物を積むことができないという問題もあった。さらに、従来のシステムによると、比較的体積の小さい商品単品の把持を行うことはできるものの、箱やケースといった比較的体積の大きな物を把持することができないという問題があった。
However, in the vicinity of product shelves and in warehouses, the shelves are usually not spaced as far apart as necessary, and since there are many products stored in warehouses, it cannot be said that there is sufficient space for work. However, with conventional systems, the robot arm protrudes outward from the automated guided vehicle to make it easier to handle products, which makes it difficult to perform pick-and-place operations such as removing products from such a narrow space and displaying them on the product shelves. In addition, conventional systems also have the problem of being unable to load large loads on the loading platform. Furthermore, while conventional systems can grasp individual products with relatively small volumes, they have the problem of being unable to grasp relatively large objects such as boxes and cases.
本発明は、上記課題を解決するために成されたものであって、狭い作業スペースにおいても商品のピック&プレイス作業を円滑に行うことができると共に、ケースなどの体積の大きな物を把持することができ、多くの荷物を積むことができるロボットを提供することを目的とする。
The present invention has been made to solve the above problems, and aims to provide a robot that can smoothly pick and place products even in a small work space, and can grasp large items such as cases and carry a large amount of cargo.
上記課題を解決する本発明に係るロボットは、走行機能を有する台車部と、前記台車部から鉛直方向に延設された一対の柱部と、前記一対の柱部の上端を連結する連結部とを有する門柱部と、前記柱部の延設方向に沿って移動可能に組付けられる腕部とを備え、前記腕部は、前記柱部に移動可能に組付けられる基端部と、前記基端部に第1関節部を介して回動可能に組付けられた第1腕部と、前記第1腕部に第2関節部を介して回動可能に組付けられた第2腕部と、前記第2腕部に第3関節部を介して回動可能に組付けられた第3腕部とを備え、前記第3腕部には、対象物を把持する把持部を備えたことを特徴とする。
The robot according to the present invention, which solves the above problems, comprises a cart with a running function, a pillar section having a pair of pillars extending vertically from the cart and a connecting section connecting the upper ends of the pair of pillars, and an arm section movably attached along the extension direction of the pillars, the arm section comprising a base end movably attached to the pillars, a first arm section rotatably attached to the base end via a first joint section, a second arm section rotatably attached to the first arm section via a second joint section, and a third arm section rotatably attached to the second arm section via a third joint section, the third arm section having a gripping section for gripping an object.
また、本発明に係る把持部は、対象物を把持する把持部であって、把持部本体と、前記把持部本体に回動軸を介して互いに独立して回動可能に組み付けられる一対の把持爪を有し、前記把持爪は、前記対象物を着脱可能な着脱手段を備えることを特徴とする。
The gripping unit according to the present invention is a gripping unit for gripping an object, and has a gripping unit main body and a pair of gripping claws that are attached to the gripping unit main body via a rotation shaft so as to be rotatable independently of each other, and the gripping claws are provided with an attachment/detachment means for attaching and detaching the object.
本発明に係るロボットによれば、腕部が作業時にも車体外へ張り出す部分が少なく、省スペースでの作業を効率よく行う事が可能となる。また、門柱部の柱部に腕部を取り付けているので、台車上方のスペース全体を荷台として用いることが可能となる。
With the robot of the present invention, only a small portion of the arm protrudes outside the vehicle body during operation, making it possible to work efficiently in a small space. In addition, because the arm is attached to the pillar of the gatepost, the entire space above the cart can be used as a loading platform.
以下、本発明に係るロボットの実施形態について図面を参照しつつ説明する。なお、以下の実施形態は、各請求項に係る発明を限定するものではなく、また、実施形態の中で説明されている特徴の組み合わせの全てが発明の解決手段に必須であるとは限らない。
Below, an embodiment of a robot according to the present invention will be described with reference to the drawings. Note that the following embodiment does not limit the invention according to each claim, and not all of the combinations of features described in the embodiment are necessarily essential to the solution of the invention.
図1は、本発明の実施形態に係るロボットの斜視図であり、図2は、本発明の実施形態に係るロボットの腕部を示す拡大図であり、図3は、本発明の実施形態に係るロボットの腕部の動きを示す図であって、(a)は、格納状態,(b)は、前状態,(c)は、下状態,(d)は、上状態を示す図であり、図4は、本発明の実施形態に係るロボットの荷物を載置した状態を示す図であり、図5は、本発明の実施形態に係るロボットの動作を説明する図であって、地面に載置されたケースを抱持する状態を示す図であり、図6は、本発明の実施形態に係るロボットの動作を説明する図であって、ケースを抱持した状態を示す図であり、図7は、本発明の実施形態に係るロボットの動作を説明する図であって、商品棚に商品を陳列する動作を示す図であり、図8は、本発明の実施形態に係るロボットの把持部の変形例を示す斜視図であり、図9は、本発明の実施形態に係るロボットの把持部の変形例を示す正面図であり、図10は、本発明の実施形態に係るロボットの把持部の変形例を示す側面図であり、図11は、本発明の実施形態に係るロボットの把持部の変形例を示す底面からみた斜視図であり、図12は、図9におけるA-A断面図であり、図13は、本発明の実施形態に係るロボットの把持部の変形例の動作を示す図であって、(a)は、断面丸状の把持対象物を把持した状態、(b)は、平板状の把持対象物を上から把持した状態、(c)は、平板状の把持対象物を把持した状態を示す図である。なお、本明細書において、前後上下方向とは、図1に示す矢印の方向と定義し、ロール方向、ピッチ方向及びヨー方向とは、図2に示すロール軸、ピッチ軸及びヨー軸周りの回転方向と定義する。
FIG. 1 is an oblique view of a robot according to an embodiment of the present invention, FIG. 2 is an enlarged view showing the arm of a robot according to an embodiment of the present invention, FIG. 3 is a diagram showing the movement of the arm of a robot according to an embodiment of the present invention, where (a) is a diagram showing a stored state, (b) is a diagram showing a front state, (c) is a diagram showing a down state, and (d) is a diagram showing an up state, FIG. 4 is a diagram showing a robot according to an embodiment of the present invention with luggage placed thereon, FIG. 5 is a diagram explaining the operation of a robot according to an embodiment of the present invention, showing a state in which it is holding a case placed on the ground, FIG. 6 is a diagram explaining the operation of a robot according to an embodiment of the present invention, showing a state in which it is holding a case, and FIG. 7 is a diagram explaining the operation of a robot according to an embodiment of the present invention. FIG. 8 is a perspective view showing a modified gripping part of a robot according to an embodiment of the present invention, FIG. 9 is a front view showing a modified gripping part of a robot according to an embodiment of the present invention, FIG. 10 is a side view showing a modified gripping part of a robot according to an embodiment of the present invention, FIG. 11 is a perspective view from the bottom showing a modified gripping part of a robot according to an embodiment of the present invention, FIG. 12 is a cross-sectional view taken along line A-A in FIG. 9, and FIG. 13 is a diagram showing the operation of a modified gripping part of a robot according to an embodiment of the present invention, where (a) shows a state in which a gripping object having a round cross section is gripped, (b) shows a state in which a gripping object having a flat shape is gripped from above, and (c) shows a state in which a gripping object having a flat shape is gripped. In this specification, the front-rear and up-down directions are defined as the directions of the arrows shown in FIG. 1, and the roll direction, pitch direction, and yaw direction are defined as the directions of rotation around the roll axis, pitch axis, and yaw axis shown in FIG. 2.
図1に示すように、本実施形態に係るロボット1は、走行機能を有する台車部10と、台車部10から鉛直方向に延設された一対の柱部21,21と、一対の柱部21,21の上端を連結する連結部22とを有する門柱部20と、柱部21の延設方向に沿って移動可能に組付けられる一対の腕部30とを備えている。
As shown in FIG. 1, the robot 1 according to this embodiment includes a cart 10 with a running function, a gatepost 20 having a pair of pillars 21, 21 extending vertically from the cart 10 and a connecting portion 22 connecting the upper ends of the pair of pillars 21, 21, and a pair of arms 30 assembled so as to be movable along the extending direction of the pillars 21.
台車部10は、複数の車輪11を有し、図示しない駆動モータ,制御装置及び制動装置などを有する走行装置によって自走可能に構成されている。そして、本実施形態にかかるロボット1は、当該台車部10によって自走可能であり、商品の補充対象となる商品棚までの位置や商品が在庫されている倉庫内を自走することができる。
The cart unit 10 has multiple wheels 11 and is configured to be self-propelled by a running device having a drive motor, control device, braking device, etc. (not shown). The robot 1 in this embodiment is self-propelled by the cart unit 10, and can move by itself to a position up to a product shelf where products are to be replenished or within a warehouse where products are stocked.
台車部10は、扁平箱型の台車本体12を有しており、当該台車本体12内に上述した駆動モータ,制御装置並びに制動装置などが収納されている。また、台車本体12の上面13は平坦に形成されており、商品やケースを載置することができる載置スペースとして利用可能となっている。
The cart section 10 has a flat box-shaped cart body 12, which houses the drive motor, control device, braking device, and the like. The top surface 13 of the cart body 12 is formed flat and can be used as a loading space on which products and cases can be placed.
台車本体12の上面13の後端の角部には、門柱部20が鉛直方向(上下方向)に沿って立設している。門柱部20は、台車本体12の上面13から鉛直方向に立設した一対の柱部21,21と、当該柱部21,21の上端を互いに連結する連結部22とを有した門型に形成されている。
A gatepost 20 stands vertically (up and down) at the rear corner of the top surface 13 of the cart body 12. The gatepost 20 is formed in a gate shape with a pair of pillars 21, 21 standing vertically from the top surface 13 of the cart body 12 and a connecting portion 22 that connects the upper ends of the pillars 21, 21 to each other.
柱部21の前側面には、後述する腕部30(第1アーム部材30a,第2アーム部材30b)が取り付けられている。柱部21は図示しない移動機構を備えており、当該移動機構によって腕部30を柱部21の上下方向に移動可能に組み付けている。なお、移動機構は、腕部30を柱部21の上下方向に沿って移動することができれば、従来周知の種々の構成を用いることができるが、例えば、駆動モータと当該駆動モータによって回動可能な環状のベルト部材によって構成すると好適である。
The arm 30 (first arm member 30a, second arm member 30b) described below is attached to the front side of the pillar 21. The pillar 21 is equipped with a movement mechanism (not shown), and the arm 30 is assembled so that it can be moved in the vertical direction of the pillar 21 by this movement mechanism. Note that the movement mechanism can use various conventionally known configurations as long as it can move the arm 30 along the vertical direction of the pillar 21, but it is preferable for it to be configured, for example, by a drive motor and a circular belt member that can be rotated by the drive motor.
また、柱部21の互いに対向する対向側面には、所定の間隔で一方の柱部21から他方の柱部21に向かって突出するフランジ部23が形成されている。このフランジ部23の対向方向に沿った長さは、柱部21間でフランジ部23上にケースを保持することができる程度に形成されており、フランジ部23同士の間には所定の隙間が形成されている。
Furthermore, flanges 23 are formed on the opposing side surfaces of the pillars 21, protruding from one pillar 21 toward the other pillar 21 at a specified interval. The length of the flanges 23 along the opposing direction is formed to be sufficient to hold the case on the flanges 23 between the pillars 21, and a specified gap is formed between the flanges 23.
連結部22は、略中央部分に第1撮像部40を備えている。第1撮像部40は、従来周知の種々のカメラを用いることができる。第1撮像部40は、本実施形態に係るロボット1の前方の画像を撮影することができる。なお、第1撮像部40は、例えば、360°の撮影が可能な全天球カメラが好適に用いられる。
The connecting part 22 is provided with a first imaging unit 40 in approximately the center. The first imaging unit 40 can be any of various conventionally known cameras. The first imaging unit 40 can capture an image in front of the robot 1 according to this embodiment. For example, a spherical camera capable of 360° imaging is preferably used as the first imaging unit 40.
腕部30は、一対の柱部21,21のそれぞれに組み付けられた第1アーム部材30a及び第2アーム部材30bとを有している。第1アーム部材30a及び第2アーム部材30bは、それぞれ同様の構成を有する部材であるため、以降の説明については、第1アーム部材30aについて説明を行い、第2アーム部材30bについては、詳細な説明を省略する。
The arm portion 30 has a first arm member 30a and a second arm member 30b that are respectively attached to a pair of pillar portions 21, 21. Since the first arm member 30a and the second arm member 30b are members each having a similar configuration, the following explanation will focus on the first arm member 30a, and a detailed explanation of the second arm member 30b will be omitted.
図2に示すように、第1アーム部材30aは、柱部21に移動可能に組付けられる基端部31と、基端部31の先端に第1関節部32を介して回動可能に組付けられた第1腕部33と、第1腕部33の先端に第2関節部34を介して回動可能に組付けられた第2腕部35と、第2腕部35の先端に第3関節部36を介して回動可能に組付けられた第3腕部37とを備え、第3腕部37の先端には、第4関節部38を介して回動可能に組み付けられた把持部39を備えている。
As shown in FIG. 2, the first arm member 30a comprises a base end 31 movably attached to the pillar portion 21, a first arm portion 33 rotatably attached to the tip of the base end 31 via a first joint portion 32, a second arm portion 35 rotatably attached to the tip of the first arm portion 33 via a second joint portion 34, and a third arm portion 37 rotatably attached to the tip of the second arm portion 35 via a third joint portion 36, and the tip of the third arm portion 37 comprises a grip portion 39 rotatably attached to the tip of the third arm portion 37 via a fourth joint portion 38.
基端部31は、基端側が柱部21に上下方向に沿って移動可能に組み付けられており、先端側の上方に第1関節部32が取り付けられている。第1関節部32は、基端側が基端部31に対してヨー方向aに回動自在に取り付けられており、先端側は第1軸32aを介してピッチ方向bに回動自在に第1腕部33が取り付けられている。なお、第1関節部32は、図示しないモータによって上述したヨー方向a及びピッチ方向bの回動を行っている。
The base end 31 is attached to the column 21 at its base end so as to be movable up and down, and the first joint 32 is attached above the tip end. The base end of the first joint 32 is attached to the base end 31 so as to be rotatable in the yaw direction a, and the tip end has a first arm 33 attached thereto so as to be rotatable in the pitch direction b via a first shaft 32a. The first joint 32 rotates in the yaw direction a and pitch direction b described above by a motor (not shown).
第1腕部33及び第2腕部35は、概略同一形状の長尺箱型部材であって、それぞれの両端に第1軸32a及び第2軸34a並びに第3軸34b及び第4軸36aが形成されている。第1腕部33の先端側及び第2腕部35の基端側は、第2関節部34に組み付けられており、第2軸34a及び第3軸34bを介してピッチ方向bに回動自在に取り付けられている。
The first arm 33 and the second arm 35 are long box-shaped members of roughly the same shape, with a first axis 32a and a second axis 34a, and a third axis 34b and a fourth axis 36a formed at both ends of each. The tip side of the first arm 33 and the base side of the second arm 35 are attached to the second joint 34, and are attached so as to be freely rotatable in the pitch direction b via the second axis 34a and the third axis 34b.
第3腕部37は、第1腕部33及び第2腕部35と同様の長尺箱形部材であるが、基端側が上方に湾曲した湾曲部を形成しており、当該湾曲部の上面に上述した第1関節部32と同様の形状を有する第3関節部36が取り付けられている。第3関節部36は、基端側が第4軸36aを介してピッチ方向bに回動自在に第2腕部35に取り付けられ、先端側が第3腕部37にヨー方向aに回動自在に組み付けられている。
The third arm 37 is a long box-shaped member similar to the first arm 33 and the second arm 35, but the base end forms a curved portion that curves upward, and the third joint 36, which has a shape similar to the first joint 32 described above, is attached to the upper surface of the curved portion. The base end of the third joint 36 is attached to the second arm 35 via the fourth shaft 36a so as to be rotatable in the pitch direction b, and the tip end is assembled to the third arm 37 so as to be rotatable in the yaw direction a.
また、第3腕部37の湾曲部の側面には第2撮像部41(第2アーム部材30bについては、第3撮像部42)が取り付けられている。第2撮像部41は、着脱自在に取り付けられており、湾曲部の側面に限らず、腕部30の任意の位置に取り付けることができる。
A second imaging unit 41 (for the second arm member 30b, a third imaging unit 42) is attached to the side of the curved portion of the third arm 37. The second imaging unit 41 is attached detachably and can be attached to any position on the arm 30, not just the side of the curved portion.
また、第3腕部37の第1アーム部材30aと第2アーム部材30bとが互いに対向する対向面には、抱持面50が形成されている。抱持面50は、後述するように第1アーム部材30aと第2アーム部材30bとによってケースなどを抱え持つ場合に用いる部位であり、抱え込んだケース等が脱落しないように抱持面50にスリット形状が形成されていたり、弾性材を貼付していると好適である。
Furthermore, a holding surface 50 is formed on the opposing surfaces of the first arm member 30a and the second arm member 30b of the third arm portion 37. The holding surface 50 is a portion used when the first arm member 30a and the second arm member 30b hold a case or the like as described below, and it is preferable that a slit shape is formed in the holding surface 50 or that an elastic material is attached to prevent the case or the like from falling out.
第3腕部37の先端には、第4関節部38を介して把持部39が取り付けられている。第4関節部38は、基端側が第3腕部37の先端側に対してロール方向cに回動自在に組み付けられており、先端側が第5軸38aを介してピッチ方向bに回動自在に把持部39に組み付けられている。また、把持部39は、第6軸38bを介してヨー方向aに回動自在に組み付けられている。
A gripper 39 is attached to the tip of the third arm 37 via a fourth joint 38. The base end of the fourth joint 38 is attached to the tip of the third arm 37 so as to be rotatable in the roll direction c, and the tip is attached to the gripper 39 via a fifth shaft 38a so as to be rotatable in the pitch direction b. The gripper 39 is also attached to the sixth shaft 38b so as to be rotatable in the yaw direction a.
把持部39は、一対の把持爪61,61が基端側を中心として回動し、先端側が近接・離間自在に組み付けられている。この把持爪61の先端を互いに近接する方向に回動させることで商品などの把持対象物を把持し、互いに離間させる方向に回動させることで、把持した把持対象物の解放を行うことができる。
The gripping section 39 has a pair of gripping claws 61, 61 that rotate around the base end, and the tip ends are assembled so that they can move toward or away from each other. The tips of the gripping claws 61 can be rotated in a direction that brings them closer together to grip a product or other object to be gripped, and can be rotated in a direction that moves them away from each other to release the gripped object.
このように構成された腕部30は、倉庫や商品棚における移動の際には、図3(a)に示すように第1腕部33と第2腕部35とを互いに近接させるとともに、柱部21と略平行となるように配置することでロボット1から大きく腕部30が飛び出すことなくコンパクトに腕部30を格納状態とすることができる。
When the arm 30 is configured in this manner and moved around a warehouse or on a product shelf, the first arm 33 and the second arm 35 are brought close to each other as shown in FIG. 3(a) and arranged so as to be approximately parallel to the pillar 21, so that the arm 30 can be stored compactly without protruding far from the robot 1.
また、商品のピック&プレイス作業においては、前方にある商品を取り出す等の時は、図3(b)に示すように、第1腕部33と第2腕部35を伸ばして地面と水平な前状態とすることで遠くの商品を取り出し易くし、商品が高い箇所または低い箇所にある場合には、柱部21に沿って腕部30の基端部31の高さを調整した上で、図3(c)または図3(d)に示すように、第1腕部33と第2腕部35とを互いに交差するように配置することで容易に商品を取り出すことができる状態とすることができる。また、商品のピック&プレイス作業を行う前状態、上状態又は下状態などの腕部30を伸ばした状態であっても、平行リンクを垂直に用いた構造であることから、第1~第3腕部33,35,37それぞれの根本軸への負荷を低減することができる。
In addition, in the pick-and-place operation of goods, when a product located in front needs to be taken out, as shown in FIG. 3(b), the first arm 33 and the second arm 35 are extended to the front position horizontal to the ground, making it easier to take out a product that is far away. If the product is located in a high or low position, the height of the base end 31 of the arm 30 can be adjusted along the pillar 21, and the first arm 33 and the second arm 35 can be arranged to cross each other as shown in FIG. 3(c) or FIG. 3(d), making it possible to easily take out the product. In addition, even when the arm 30 is extended in the front state, upper state, or lower state for the pick-and-place operation of goods, the load on the root axis of each of the first to third arms 33, 35, and 37 can be reduced because of the structure using the parallel links vertically.
また、台車部10の上面13は平坦な載置面として形成されているので、図4に示すように、台車部10にケースBなどを積み上げて運搬することも可能であり、門柱部20の柱部21,21間も載置スペースとして用いることができる。
Also, since the top surface 13 of the cart 10 is formed as a flat loading surface, it is possible to stack cases B and the like on the cart 10 for transport, as shown in Figure 4, and the space between the pillars 21, 21 of the gatepost 20 can also be used as loading space.
また、柱部21には、フランジ部23が形成されているので、図5に示すように柱部21間にトレイTやケースBなどを載置することができる。なお、本実施形態に係るロボット1は、柱部21,21間に棚板などが存在しないため、門柱部20の連結部22に取り付けられた第1撮像部40で台車部10の上面13の載置面やフランジ部23間に保持されたトレイTやケースBの状態を良好に撮影することが可能となる。
Furthermore, the pillars 21 are formed with flanges 23, so that trays T, cases B, etc. can be placed between the pillars 21 as shown in FIG. 5. In addition, since the robot 1 according to this embodiment does not have shelves or the like between the pillars 21, 21, it is possible for the first imaging unit 40 attached to the connecting portion 22 of the gatepost 20 to clearly capture images of the placement surface of the upper surface 13 of the cart 10 and the state of the trays T and cases B held between the flanges 23.
さらに、本実施形態に係るロボット1は、柱部21,21のそれぞれに第1アーム部材30a及び第2アーム部材30bを設け、これらの第1アーム部材30a及び第2アーム部材30bが互いに独立して上下方向及び前後方向に動作することができるので、同時に異なる商品を取り扱うことができるなど、対応できる作業の幅を広くすることができる。
Furthermore, the robot 1 according to this embodiment is provided with a first arm member 30a and a second arm member 30b on each of the pillars 21, 21, and these first arm member 30a and second arm member 30b can move in the up-down and back-forth directions independently of each other, so that the range of tasks that can be performed can be expanded, such as by handling different products at the same time.
また、本実施形態に係るロボット1の腕部30には、抱持面50が形成されているので、図5及び図6に示すように、第1アーム部材30a及び第2アーム部材30bの抱持面50によってケースを抱え込んで持ち上げることが可能となる。
In addition, the arms 30 of the robot 1 according to this embodiment are formed with holding surfaces 50, so that the case can be held and lifted by the holding surfaces 50 of the first arm member 30a and the second arm member 30b, as shown in Figures 5 and 6.
次に、図5から7を参照して本実施形態に係るロボット1の動作について説明を行う。まず、地面に載置されたケースBを持ち上げる動作について説明を行う。第1に台車部10を駆動させて把持対象となるケースBの近傍に本実施形態に係るロボット1を移動させる。このとき、第1撮像部40において、把持対象となるケースBの画像を撮影し、当該画像データを画像処理等してケースBの位置まで移動させる。
Next, the operation of the robot 1 according to this embodiment will be described with reference to Figures 5 to 7. First, the operation of lifting up case B placed on the ground will be described. First, the cart unit 10 is driven to move the robot 1 according to this embodiment to the vicinity of case B to be grasped. At this time, an image of case B to be grasped is taken by the first imaging unit 40, and the image data is subjected to image processing, etc., and the robot 1 is moved to the position of case B.
その後、ケースBの近傍まで台車部10を移動させた後、腕部30を伸ばし、例えば図3(b)の前状態とする。このとき、腕部30の基端部31は、柱部21の下側に移動させて腕部30の第3腕部37がケースBの側面を抱きかかえることができる高さまで移動させる。
Then, the cart 10 is moved close to case B, and the arm 30 is extended, for example to the front state shown in FIG. 3(b). At this time, the base end 31 of the arm 30 is moved below the pillar 21 to a height where the third arm 37 of the arm 30 can embrace the side of case B.
この状態で、ケースBの両側面を一対の腕部30の抱持面50,50によって挟み込む。このとき、第1関節部32及び第3関節部36を抱持面50,50が互いに近接する方向にピッチ方向bに回転させることでケースBをより確実に抱きかかえることが可能となる。
In this state, both sides of case B are sandwiched between the holding surfaces 50, 50 of the pair of arms 30. At this time, by rotating the first joint portion 32 and the third joint portion 36 in the pitch direction b so that the holding surfaces 50, 50 approach each other, case B can be held more securely.
その後、図6に示すように、腕部30の基端部31を柱部21に沿って上昇させることで、ケースBを持ち上げることができ、台車部10の上面13や柱部21に形成されたフランジ部23上に当該ケースBを載置して運搬することができる。
Then, as shown in FIG. 6, the base end 31 of the arm 30 is raised along the pillar 21, so that the case B can be lifted, and the case B can be placed on the upper surface 13 of the cart 10 or on the flange 23 formed on the pillar 21 for transport.
また、台車部10に載置して運搬してきた商品Gを商品棚60に陳列する場合には、商品棚60の間で腕部30を図3(a)に示す格納状態とすることで、商品棚60に干渉することなく本実施形態に係るロボット1を移動させることができる。そして、所望の商品棚60の位置まで移動した後、運搬してきた商品Gを商品棚60の所定の場所に陳列を行う。
In addition, when the product G that has been placed on the trolley unit 10 and transported is to be displayed on the product shelf 60, the arm unit 30 can be stored between the product shelves 60 as shown in FIG. 3(a), allowing the robot 1 according to this embodiment to move without interfering with the product shelves 60. After moving to the desired product shelf 60 position, the transported product G is displayed in a designated location on the product shelf 60.
このとき、第1アーム部材30a及び第2アーム部材30bは、互いに独立して動作することができるので、図7に示すように、第1アーム部材30aは、商品棚60の上段への陳列を行い、第2アーム部材30bは、下段への陳列を同時に行う事が可能となる。
At this time, the first arm member 30a and the second arm member 30b can operate independently of each other, so that, as shown in FIG. 7, the first arm member 30a can display products on the upper level of the product shelf 60, and the second arm member 30b can simultaneously display products on the lower level.
また、第2アーム部材30bのように、第1腕部33及び第2腕部35を格納状態にし、第3関節部36をヨー方向aに回転させることで商品Gの陳列を行うことができる。また、把持部39は、第3腕部37に対してロール方向、ピッチ方向及びヨー方向に回動自在に組み付けられているので、商品Gを所望の姿勢で自由に陳列することが可能となる。
Also, like the second arm member 30b, the first arm 33 and the second arm 35 can be stored and the third joint 36 can be rotated in the yaw direction a to display the products G. In addition, the gripping portion 39 is attached to the third arm 37 so as to be rotatable in the roll direction, pitch direction, and yaw direction, so that the products G can be freely displayed in any desired position.
また、第1アーム部材30a及び第2アーム部材30bには、それぞれ第2撮像部41及び第3撮像部42を備えているので、第1アーム部材30a及び第2アーム部材30bが独立して画像処理を行うことができるので、より効率的に商品Gの陳列を行うことが可能となる。
In addition, the first arm member 30a and the second arm member 30b are equipped with the second imaging unit 41 and the third imaging unit 42, respectively, so that the first arm member 30a and the second arm member 30b can perform image processing independently, making it possible to display the products G more efficiently.
上記実施形態においては、把持部39は、一対の把持爪61,61が基端側を中心として回動し、先端側が近接・離間自在に組み付けられている場合について説明を行ったが、以下に把持部の変形例について説明を行う。
In the above embodiment, the gripping portion 39 is described as having a pair of gripping claws 61, 61 that rotate around the base end and are assembled so that the tip end can move toward and away from each other. Below, however, modified examples of the gripping portion are described.
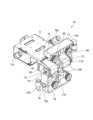
図8に示すように、本変形例に係る把持部70は、把持部本体71と、把持部本体71の先端部に取り付けられた一対の把持爪72a,72bとを有している。把持部本体71は、基端側に図示しない取付部を介して第4関節部38に取り付け可能に構成される。また、把持部本体71は、後述する第2の把持爪72bが把持部本体71の基端側に回動した場合に把持部本体71と第2の把持爪72bとが干渉することを防止する収容凹部79が形成されている。さらに、把持部本体71の側部には、後述する供給口120と接続される導入口121が一対形成されている。
As shown in FIG. 8, the gripper 70 according to this modified example has a gripper body 71 and a pair of gripping claws 72a, 72b attached to the tip of the gripper body 71. The gripper body 71 is configured so that it can be attached to the fourth joint 38 via an attachment part (not shown) on the base end side. The gripper body 71 also has a storage recess 79 formed therein to prevent interference between the gripper body 71 and the second gripping claw 72b when the second gripping claw 72b described below rotates toward the base end side of the gripper body 71. Furthermore, a pair of inlets 121 are formed on the side of the gripper body 71 to connect to a supply port 120 described below.
一対の把持爪72a,72bは、把持部本体71の先端側に取り付けられた爪駆動モータ100の回動軸73を介して互いに回動自在に組み付けられている。爪駆動モータ100は、一対の把持爪72a,72bに対応してそれぞれ設けられており、回動軸73は互いに同軸に配置されている。
The pair of gripping claws 72a, 72b are rotatably attached to each other via a rotating shaft 73 of a claw drive motor 100 attached to the tip side of the gripper body 71. The claw drive motors 100 are provided corresponding to the pair of gripping claws 72a, 72b, respectively, and the rotating shafts 73 are arranged coaxially with each other.
把持爪72a,72bは、互いに同一の部材を用いているため、把持部本体71の上方側へ回動する第1の把持爪72aについて説明を行い、把持部本体71の下方へ回動する第2の把持爪72bについては、詳細な説明を省略する。第1の把持爪72aは、基端側に上述した回動軸73を挿通する回動軸孔74が形成され、先端側に着脱手段80が後述する付勢手段90を介して取り付けられている。
Because the gripping claws 72a and 72b are made of the same material, only the first gripping claw 72a that rotates upward on the gripping body 71 will be described, and a detailed description of the second gripping claw 72b that rotates downward on the gripping body 71 will be omitted. The first gripping claw 72a has a pivot hole 74 formed at its base end through which the pivot shaft 73 described above passes, and has an attachment/detachment means 80 attached to its tip end via a biasing means 90 described below.
第1の把持爪72aは、爪駆動モータ100の回動軸73に取り付ける回動軸孔74が形成された側壁78と、側壁78の先端から把持部本体71の幅方向に延びる壁部77とを有している。また、爪駆動モータ100の回動軸73との反対端に回動軸73と同軸に回動する案内腕部110を有しており、当該案内腕部110は、側壁78と略平行に配置されている。
The first gripping claw 72a has a side wall 78 in which a pivot hole 74 is formed to be attached to the pivot shaft 73 of the claw drive motor 100, and a wall portion 77 extending in the width direction of the gripper body 71 from the tip of the side wall 78. In addition, at the end opposite the pivot shaft 73 of the claw drive motor 100, there is a guide arm portion 110 that rotates coaxially with the pivot shaft 73, and the guide arm portion 110 is disposed approximately parallel to the side wall 78.
側壁78には、後述する着脱手段80へ負圧を供給する供給口120を案内する長孔状の案内孔76が形成され、壁部77の側壁78との反対端には、側壁78と略平行に延びる側片78aが形成され、当該側片78aには着脱手段80を案内する案内溝75が形成されている。
The side wall 78 is formed with a long guide hole 76 that guides a supply port 120 that supplies negative pressure to the attachment/detachment means 80 described below, and a side piece 78a that extends approximately parallel to the side wall 78 is formed at the end of the wall portion 77 opposite the side wall 78, and a guide groove 75 that guides the attachment/detachment means 80 is formed in the side piece 78a.
また、第1の把持爪72aの壁部77、側壁78及び側片78aによって囲まれる内方には、着脱手段80が取り付けられている。着脱手段80は、案内溝75及び案内孔76の延設方向に移動可能に取り付けられている。
Furthermore, an attachment/detachment means 80 is attached to the inside surrounded by the wall portion 77, side wall 78, and side piece 78a of the first gripping claw 72a. The attachment/detachment means 80 is attached so as to be movable in the extension direction of the guide groove 75 and the guide hole 76.
図9に示すように、着脱手段80は、供給口120に連通する着脱手段本体81と、着脱手段本体81に取り付けられた着脱部82とを備えている着脱手段本体81は、図12に示すように内部が中空に形成されており、当該中空の内部通路を有することで、供給口120から後述する負圧ポンプ123によって空気が吸引されて着脱部82に負圧を生じさせることができる。なお、着脱部82は、吸盤状に形成されたゴム部材であると好適であり、負圧によって把持対象物に吸着して把持対象物を把持爪72a,72bに吸着することができる。
As shown in FIG. 9, the attachment/detachment means 80 comprises an attachment/detachment means main body 81 that communicates with the supply port 120, and an attachment/detachment part 82 attached to the attachment/detachment means main body 81. As shown in FIG. 12, the attachment/detachment means main body 81 is formed to be hollow inside, and by having this hollow internal passage, air can be sucked from the supply port 120 by a negative pressure pump 123 (described later) to generate negative pressure in the attachment/detachment part 82. The attachment/detachment part 82 is preferably a rubber member formed in a suction cup shape, and can be attached to the object to be grasped by the negative pressure, thereby adsorbing the object to the gripping claws 72a, 72b.
また、着脱部82は、把持爪72a,72bの幅方向に沿って複数形成されていると好適であり、本変形例では、一の把持爪72a,72bに対して着脱部82がそれぞれ2つずつ配置されている。さらに、図8に示すように、着脱手段本体81の側片78aとの対向面には、案内溝75に係合する係合突起83が形成されている。
It is also preferable that multiple attachment/detachment sections 82 are formed along the width direction of the gripping claws 72a, 72b, and in this modified example, two attachment/detachment sections 82 are arranged for each of the gripping claws 72a, 72b. Furthermore, as shown in FIG. 8, an engagement protrusion 83 that engages with the guide groove 75 is formed on the surface of the attachment/detachment means main body 81 facing the side piece 78a.
図9に示すように、着脱手段80は、着脱手段本体81の幅方向の概略中心部を案内腕部110によって保持されている。案内腕部110に近接するように付勢手段90が設けられている。図12に示すように、案内腕部110は、爪駆動モータ100の回動軸73との反対端に回動軸73と同軸に回動する案内腕部基部111と、着脱手段本体81に係合する案内腕部端部113と、案内腕部基部111と案内腕部端部113とを連絡する案内腕部本体112とを有している。
As shown in FIG. 9, the attachment/detachment means 80 is held by a guide arm 110 at approximately the center in the width direction of the attachment/detachment means main body 81. A biasing means 90 is provided adjacent to the guide arm 110. As shown in FIG. 12, the guide arm 110 has a guide arm base 111 that rotates coaxially with the rotation shaft 73 at the end opposite the rotation shaft 73 of the claw drive motor 100, a guide arm end 113 that engages with the attachment/detachment means main body 81, and a guide arm main body 112 that connects the guide arm base 111 and the guide arm end 113.
案内腕部端部113には、概略U字状のガイド部114が形成されており、当該ガイド部114に着脱手段本体81が係合することで、着脱手段本体81がガイド部114の開口部に向かって移動可能に取り付けられている。
A roughly U-shaped guide portion 114 is formed at the end 113 of the guide arm, and the attachment/detachment means main body 81 is attached so that it can move toward the opening of the guide portion 114 by engaging with the guide portion 114.
また、案内腕部110に近接して配置される付勢手段90は、着脱手段本体81を上述したガイド部114の開口部に向かう方向と反対方向に付勢する弾性部材91を有している。弾性部材91は、着脱部82の中心を挟み込むように一対設けられていると好適である。このように一対の弾性部材91によって着脱手段80を付勢することで、把持対象物の形状や向きに応じて着脱部82の向きを図12における上下方向に一定角度回転可能に構成されている。
The biasing means 90 arranged close to the guide arm 110 has an elastic member 91 that biases the detachment means main body 81 in the direction opposite to the direction toward the opening of the guide portion 114 described above. It is preferable that a pair of elastic members 91 are provided to sandwich the center of the detachment portion 82. By biasing the detachment means 80 in this way with a pair of elastic members 91, the orientation of the detachment portion 82 can be rotated a certain angle in the vertical direction in FIG. 12 according to the shape and orientation of the object to be grasped.
このように本変形例に係る把持部70は、着脱手段80を付勢手段90によって着脱部82による把持対象物の着脱方向に移動可能に配置しているため、把持対象物の形状に応じて着脱部82の向きが適切な方向となるように調整可能となり、把持対象物の適切な把持を実現することが可能である。
In this way, the gripping unit 70 of this modified example is arranged so that the attachment/detachment means 80 can be moved by the biasing means 90 in the direction in which the attachment/detachment part 82 attaches and detaches the object to be gripped. This makes it possible to adjust the orientation of the attachment/detachment part 82 to an appropriate direction depending on the shape of the object to be gripped, thereby enabling proper gripping of the object to be gripped.
さらに、把持部本体71の内部には、バルブ122が取り付けられており、当該バルブ122は、負圧ポンプ123と導入口121及び供給口120とを連通したり、当該連通を解除することが可能となっている。このバルブ122は、図示しない制御部によって開閉可能に配置されている。これにより、負圧ポンプ123で発生した負圧を着脱部82に発生させるか否かを選択することが可能となる。
Furthermore, a valve 122 is attached inside the gripper body 71, and the valve 122 can connect the negative pressure pump 123 to the inlet 121 and the supply port 120, or can release this connection. The valve 122 is arranged so that it can be opened and closed by a control unit (not shown). This makes it possible to select whether or not to generate the negative pressure generated by the negative pressure pump 123 in the detachable part 82.
次に、本変形例に係る把持部70の動作について説明を行う。まず、図10に示すように、第1の把持爪72a及び第2の把持爪72bが互いに把持部本体71に対して水平となるように回動させて、把持部70を扁平上に構成する。このとき、第2の把持爪72bは、把持部本体71の収容凹部79に収容されることで、第2の把持爪72bと把持部本体71との干渉を防いで、第2の把持爪72bを把持部本体71と水平の位置まで回動することが可能となる。
Next, the operation of the gripping unit 70 according to this modified example will be described. First, as shown in FIG. 10, the first gripping claw 72a and the second gripping claw 72b are rotated so that they are horizontal to the gripping unit main body 71, forming the gripping unit 70 in a flat shape. At this time, the second gripping claw 72b is accommodated in the accommodation recess 79 of the gripping unit main body 71, thereby preventing interference between the second gripping claw 72b and the gripping unit main body 71 and allowing the second gripping claw 72b to be rotated to a position horizontal to the gripping unit main body 71.
このように把持部70を扁平上にすることで、棚板などの上下方向に狭い空間にも把持部70を挿入して棚板に載置された把持対象物を取り扱うことが可能となる。このとき、着脱部82は、下向きに配置されることから、図13(b)に示すように、把持対象物を上方から吸着等することで、把持部70に保持することが可能となる。
By making the gripping part 70 flat in this way, it is possible to insert the gripping part 70 into a vertically narrow space such as a shelf board, and handle an object to be gripped that is placed on the shelf board. At this time, the detachable part 82 is positioned facing downward, so that the object to be gripped can be held by the gripping part 70 by adsorbing it from above, as shown in FIG. 13(b).
具体的には、棚板に載置された箱状の把持対象物を把持する場合に、棚板と把持対象物の間に把持部70を挿入することで、上方から把持対象物を吸着して保持することで、棚板に載置された把持対象物の移動を容易に行う事が可能となる。
Specifically, when grasping a box-shaped object placed on a shelf, the gripping unit 70 is inserted between the shelf and the object, and the object is attracted to and held from above, making it easy to move the object placed on the shelf.
次に、回動軸73を回動させて第1の把持爪72a及び第2の把持爪72bを回動させる。このとき、第1の把持爪72aは、把持部本体71の上方側に向けて回動させ、第2の把持爪72bを把持部本体71の前方に位置するように大きく回動させることで、図11に示すように、第1の把持爪72aと第2の把持爪72bとが互いにV字状となるように配置する。
Next, the pivot shaft 73 is rotated to rotate the first gripping claw 72a and the second gripping claw 72b. At this time, the first gripping claw 72a is rotated toward the upper side of the gripping body 71, and the second gripping claw 72b is rotated largely so that it is positioned in front of the gripping body 71, so that the first gripping claw 72a and the second gripping claw 72b are arranged in a V-shape with respect to each other, as shown in FIG. 11.
このように第1の把持爪72aと第2の把持爪72bとを配置することで、図13(a)に示すように、例えば断面丸形状の把持対象物を把持することが可能となる。具体的には、缶やペットボトルに収容された飲料物を容易に取り扱うことが可能となる。この場合、缶やペットボトルは、棚に並べて載置された状態のものを把持することも可能であるし、収容箱に収容された缶やペットボトルを収容箱から取り出すことをも可能となる。
By arranging the first gripping claw 72a and the second gripping claw 72b in this manner, it becomes possible to grip an object having a round cross section, for example, as shown in FIG. 13(a). Specifically, it becomes possible to easily handle beverages stored in cans or plastic bottles. In this case, it is possible to grip cans or plastic bottles that are lined up on a shelf, and it is also possible to remove cans or plastic bottles stored in a storage box from the storage box.
また、本変形例に係る把持部70は、第1の把持爪72aと第2の把持爪72bとが互いに独立して回動軸73に対して回動可能であるので、把持部本体71に対して任意の角度に第1の把持爪72a及び第2の把持爪72bを回動させることが可能となる。具体的には、図13(c)に示すように、把持部本体71に対して第1の把持爪72aと第2の把持爪72bの開口方向が下方向に向くように配置することも可能となる。
Furthermore, in the gripping unit 70 according to this modified example, the first gripping claw 72a and the second gripping claw 72b can rotate independently of each other about the rotation axis 73, so that the first gripping claw 72a and the second gripping claw 72b can be rotated at any angle relative to the gripping unit main body 71. Specifically, as shown in FIG. 13(c), it is also possible to arrange the first gripping claw 72a and the second gripping claw 72b so that their openings face downward relative to the gripping unit main body 71.
この場合、図13(c)に示すように、箱状の把持対象物の角部を把持することが可能となるので、例えば、図13(b)で示した棚板と把持対象物の間の間隔が把持部70が挿入できない程度に狭い場合には、把持対象物の角部を咥えるように把持することで、把持対象物を取り扱うことが可能となる。
In this case, as shown in FIG. 13(c), it is possible to grasp the corners of a box-shaped object to be grasped. For example, if the gap between the shelf and the object to be grasped as shown in FIG. 13(b) is too narrow for the grasping part 70 to insert, it is possible to handle the object to be grasped by gripping the corners of the object as if biting them.
このように形成された変形例に係る把持部70は、把持対象物を着脱部82によって吸着することで保持しているので、把持部70の基端側の第4関節部を回転させることで、把持対象物の姿勢を変更でき、狭い領域での把持対象物のハンドリングを柔軟に行うことが可能となる。
The gripping unit 70 of this modified example formed in this manner holds the object to be gripped by adsorption using the detachable part 82, so that the posture of the object to be gripped can be changed by rotating the fourth joint part on the base end side of the gripping unit 70, making it possible to flexibly handle the object to be gripped in a narrow area.
また、把持対象物の形状に合わせて第1の把持爪72a及び第2の把持爪72bの角度並びに着脱部82の角度や位置を調整することができるので、幅広い種類の把持対象物のハンドリングが可能となる。
In addition, the angle of the first gripping claw 72a and the second gripping claw 72b, as well as the angle and position of the detachable part 82, can be adjusted to match the shape of the object to be gripped, making it possible to handle a wide variety of objects to be gripped.
また、第1の把持爪72a及び第2の把持爪72bが互いに独立して回動することが可能であるので、着脱部82による吸着による保持の他、第1の把持爪72a及び第2の把持爪72bの把持によって把持対象物を保持することも可能である。
In addition, since the first gripping claw 72a and the second gripping claw 72b can rotate independently of each other, in addition to holding the object by suction with the detachable part 82, it is also possible to hold the object by gripping with the first gripping claw 72a and the second gripping claw 72b.
さらに、着脱手段80を第1の把持爪72a及び第2の把持爪72bの壁部77、側壁78及び側片78aによって囲まれる内方に取り付け、第1の把持爪72a及び第2の把持爪72bを中空形状としているので、把持部70自体を小型化することが可能であると共に、空圧システムの経路の一部として利用することで、部品点数の削減を図ることが可能となる。
Furthermore, the attachment/detachment means 80 is attached to the inside surrounded by the wall portion 77, side wall 78, and side piece 78a of the first gripping claw 72a and the second gripping claw 72b, and the first gripping claw 72a and the second gripping claw 72b are hollow, so it is possible to miniaturize the gripping portion 70 itself, and by using it as part of the path of the pneumatic system, it is possible to reduce the number of parts.
なお、商品のピック&プレイス作業においては、本実施形態に係るロボット1は、第1撮像部40を用いて商品棚60の状態を撮像する。撮像された画像データは、台車部10に内蔵された図示しない制御装置において画像処理が行われ、商品棚60において不足している商品の情報を算出する。その後、台車部10を走行制御して倉庫に移動し、必要な商品を台車部10の上面に載置する。なお、第1アーム部材30a及び第2アーム部材30bに取り付けた第2撮像部41及び第3撮像部42によって必要な商品を撮像し、画像データを処理することができるので、商品のピック&プレイス作業において、より精密な把持部39の制御を行うことができる。また、腕部30は、柱部21に沿って上下移動可能であり、第1関節部,第2関節部,第3関節部がピッチ方向及びヨー方向に回動自在に回動するので、どのような商品棚の高さにおいても商品を補充することが可能となる。
In the pick-and-place operation, the robot 1 according to this embodiment captures an image of the state of the product shelf 60 using the first imaging unit 40. The captured image data is processed by a control device (not shown) built into the trolley unit 10, and information on products that are missing from the product shelf 60 is calculated. The trolley unit 10 is then controlled to travel and move to the warehouse, and the necessary products are placed on the top surface of the trolley unit 10. The necessary products are captured by the second imaging unit 41 and the third imaging unit 42 attached to the first arm member 30a and the second arm member 30b, and the image data can be processed, so that the gripper 39 can be controlled more precisely in the pick-and-place operation. The arm unit 30 can move up and down along the pillar 21, and the first joint unit, the second joint unit, and the third joint unit can rotate freely in the pitch direction and the yaw direction, so that products can be replenished at any height of the product shelf.
以上説明した本実施形態に係るロボット1は、腕部30の先端に把持部39を設けた場合について説明を行ったが、腕部30の先端に取り付ける部材は、把持部39に限らず、例えば、エアなどの吸引によって商品を吸着することができる吸着部を用いても構わない。また、本実施形態に係るロボット1においては、腕部30を門柱部20の柱部21にそれぞれ一対設けた場合について説明を行ったが、いずれか一方の柱部21のみに腕部30を設けても構わないし、一の柱部21に複数の腕部30を取り付けても構わない。また、第1撮像部40は、全天球カメラを用いた場合について説明を行ったが、例えば、カメラを上下方向に回動可能に取り付けても構わない。また、変形例で説明した把持部70は、負圧ポンプ123によって着脱部82に負圧を発生させて把持対象物を吸着する場合について説明を行ったが、着脱部はこれに限られず、例えば、磁石や電磁石又は粘着剤によって把持対象物の保持を行っても構わない。その様な変更又は改良を加えた形態も本発明の技術的範囲に含まれうることが、特許請求の範囲の記載から明らかである。
The robot 1 according to the present embodiment has been described above with the gripping section 39 at the tip of the arm 30, but the member attached to the tip of the arm 30 is not limited to the gripping section 39, and may be, for example, an adsorption section that can adsorb a product by suction of air or the like. In addition, in the robot 1 according to the present embodiment, a pair of arms 30 are provided on each of the pillars 21 of the gatepost 20, but the arms 30 may be provided on only one of the pillars 21, or multiple arms 30 may be attached to one pillar 21. In addition, the first imaging unit 40 has been described with a spherical camera, but the camera may be attached so that it can rotate up and down, for example. In addition, the gripping section 70 described in the modified example has been described with the negative pressure pump 123 generating negative pressure in the detachable section 82 to adsorb the object to be grasped, but the detachable section is not limited to this, and the object to be grasped may be held by, for example, a magnet, electromagnet, or adhesive. It is clear from the claims that such modifications or improvements are also included within the technical scope of the present invention.
1 ロボット, 10 台車部, 20 門柱部, 21 柱部,
22 連結部, 23 フランジ部, 30 腕部, 30a
第1アーム部材, 30b 第2アーム部材, 31 基端部,
32 第1関節部, 33 第1腕部, 34 第2関節部,
35 第2腕部, 36 第3関節部, 37 第3腕部,
39,70 把持部, 40 第1撮像部, 41 第2撮像部,
42 第3撮像部, 50 抱持面, 72a 第1の把持爪,
72b 第2の把持爪, 73 回動軸, 79 収容凹部,
80 着脱手段, 90 付勢手段。 1 Robot, 10 Cart section, 20 Gatepost section, 21 Pillar section,
22 Connection portion, 23 Flange portion, 30 Arm portion, 30a
First arm member, 30b Second arm member, 31 Base end portion,
32 first joint portion, 33 first arm portion, 34 second joint portion,
35 second arm portion, 36 third joint portion, 37 third arm portion,
39, 70 gripping portion, 40 first imaging portion, 41 second imaging portion,
42 third imaging unit, 50 holding surface, 72a first gripping claw,
72b second gripping claw, 73 pivot shaft, 79 accommodation recess,
80 Detachable means, 90 Actuating means.
22 連結部, 23 フランジ部, 30 腕部, 30a
第1アーム部材, 30b 第2アーム部材, 31 基端部,
32 第1関節部, 33 第1腕部, 34 第2関節部,
35 第2腕部, 36 第3関節部, 37 第3腕部,
39,70 把持部, 40 第1撮像部, 41 第2撮像部,
42 第3撮像部, 50 抱持面, 72a 第1の把持爪,
72b 第2の把持爪, 73 回動軸, 79 収容凹部,
80 着脱手段, 90 付勢手段。 1 Robot, 10 Cart section, 20 Gatepost section, 21 Pillar section,
22 Connection portion, 23 Flange portion, 30 Arm portion, 30a
First arm member, 30b Second arm member, 31 Base end portion,
32 first joint portion, 33 first arm portion, 34 second joint portion,
35 second arm portion, 36 third joint portion, 37 third arm portion,
39, 70 gripping portion, 40 first imaging portion, 41 second imaging portion,
42 third imaging unit, 50 holding surface, 72a first gripping claw,
72b second gripping claw, 73 pivot shaft, 79 accommodation recess,
80 Detachable means, 90 Actuating means.
Claims (10)
- 走行機能を有する台車部と、
前記台車部から鉛直方向に延設された一対の柱部と、前記一対の柱部の上端を連結する連結部とを有する門柱部と、
前記柱部の延設方向に沿って移動可能に組付けられる腕部とを備え、
前記腕部は、前記柱部に移動可能に組付けられる基端部と、前記基端部に第1関節部を介して回動可能に組付けられた第1腕部と、前記第1腕部に第2関節部を介して回動可能に組付けられた第2腕部と、前記第2腕部に第3関節部を介して回動可能に組付けられた第3腕部とを備え、前記第3腕部には、対象物を把持する把持部を備えたことを特徴とするロボット。 A carriage unit having a traveling function;
A gate post portion having a pair of pillar portions extending vertically from the cart portion and a connecting portion connecting the upper ends of the pair of pillar portions;
An arm portion is attached movably along an extension direction of the column portion,
the arm comprises a base end portion movably attached to the pillar portion, a first arm portion rotatably attached to the base end portion via a first joint portion, a second arm portion rotatably attached to the first arm portion via a second joint portion, and a third arm portion rotatably attached to the second arm portion via a third joint portion, and the third arm portion is provided with a gripping portion for gripping an object. - 請求項1に記載のロボットにおいて、
前記第1関節部及び前記第3関節部は、前記第1腕部又は前記第3腕部を前記基端部又は前記第2腕部に対してヨー方向及びピッチ方向に回動可能に組み付けられ、前記第2関節部は、前記第1腕部及び第2腕部をそれぞれピッチ方向に回動可能に組み付けられていることを特徴とするロボット。 2. The robot according to claim 1,
the first joint unit and the third joint unit are assembled so that the first arm unit or the third arm unit can rotate in a yaw direction and a pitch direction relative to the base end unit or the second arm unit, and the second joint unit is assembled so that the first arm unit and the second arm unit can each rotate in the pitch direction. - 請求項1に記載のロボットにおいて、
前記腕部は、第1アーム部材及び第2アーム部材からなり、前記一対の柱部のそれぞれに前記第1アーム部材及び前記第2アーム部材が取り付けられることを特徴とするロボット。 2. The robot according to claim 1,
The robot, wherein the arm portion comprises a first arm member and a second arm member, the first arm member and the second arm member being attached to each of the pair of pillar portions. - 請求項1に記載のロボットにおいて、
前記把持部は、前記第3腕部に対してロール方向、ピッチ方向及びヨー方向に回動自在に組み付けられる第4関節部を有することを特徴とするロボット。 2. The robot according to claim 1,
The robot according to claim 1, wherein the gripping unit has a fourth joint unit that is assembled to the third arm unit so as to be rotatable in a roll direction, a pitch direction, and a yaw direction. - 請求項1に記載のロボットにおいて、
前記第3腕部は、前記第3関節部が組み付けられる基端側と前記把持部が組み付けられる先端側との間の側面に抱持面が形成されることを特徴とするロボット。 2. The robot according to claim 1,
A robot characterized in that the third arm portion has a holding surface formed on a side surface between a base end side to which the third joint portion is assembled and a tip end side to which the gripping portion is assembled. - 請求項1に記載のロボットにおいて、
前記把持部は、把持部本体に同軸に配置された回動軸を介して互いに独立して回動自在に組み付けられた一対の把持爪を有し、
前記把持爪は、前記対象物を着脱可能な着脱手段を備えることを特徴とするロボット。 2. The robot according to claim 1,
The gripping portion has a pair of gripping claws that are attached to a gripping portion body so as to be rotatable independently of each other via a rotation shaft that is coaxially arranged on the gripping portion body,
The robot is characterized in that the gripping claws are provided with an attachment/detachment means capable of attaching and detaching the object. - 請求項6に記載のロボットにおいて、
前記把持部本体は、前記把持爪の一方を収容可能な収容凹部を備えることを特徴とするロボット。 The robot according to claim 6,
The robot is characterized in that the gripping body has an accommodating recess capable of accommodating one of the gripping claws. - 請求項6に記載のロボットにおいて、
前記着脱手段は、前記把持爪に付勢手段を介して着脱方向に移動可能に取り付けられることを特徴とするロボット。 The robot according to claim 6,
The robot is characterized in that the attachment/detachment means is attached to the gripping claws via a biasing means so as to be movable in an attachment/detachment direction. - 対象物を把持する把持部であって、
把持部本体と、前記把持部本体に回動軸を介して互いに独立して回動可能に組み付けられる一対の把持爪を有し、
前記把持爪は、前記対象物を着脱可能な着脱手段を備えることを特徴とする把持部。 A gripping unit that grips an object,
The gripper has a grip body and a pair of gripping claws that are attached to the grip body via a rotation shaft so as to be rotatable independently of each other,
A gripping portion, characterized in that the gripping claws are provided with an attachment/detachment means by which the object can be attached and detached. - 請求項9に記載の把持部において、
前記着脱手段は、前記対象物の着脱方向に移動可能に配置されることを特徴とする把持部。 The gripping portion according to claim 9,
The gripping unit is characterized in that the attachment/detachment means is arranged to be movable in a direction in which the object is attached or detached.
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2022-202040 | 2022-12-19 | ||
| JP2022202040 | 2022-12-19 | ||
| JP2023-021880 | 2023-02-15 | ||
| JP2023021880 | 2023-02-15 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2024135223A1 true WO2024135223A1 (en) | 2024-06-27 |
Family
ID=91588212
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2023/042168 WO2024135223A1 (en) | 2022-12-19 | 2023-11-24 | Robot and gripping unit |
Country Status (1)
| Country | Link |
|---|---|
| WO (1) | WO2024135223A1 (en) |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH029595A (en) * | 1988-06-29 | 1990-01-12 | Matsushita Electric Ind Co Ltd | Gripping device of parts fitting machine |
| JP2009215014A (en) * | 2008-03-11 | 2009-09-24 | Ishikame Kogyo:Kk | Lifting tool pressed to inner circumference surface of annular member |
| WO2021125035A1 (en) * | 2019-12-17 | 2021-06-24 | Thk株式会社 | Robot |
-
2023
- 2023-11-24 WO PCT/JP2023/042168 patent/WO2024135223A1/en unknown
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH029595A (en) * | 1988-06-29 | 1990-01-12 | Matsushita Electric Ind Co Ltd | Gripping device of parts fitting machine |
| JP2009215014A (en) * | 2008-03-11 | 2009-09-24 | Ishikame Kogyo:Kk | Lifting tool pressed to inner circumference surface of annular member |
| WO2021125035A1 (en) * | 2019-12-17 | 2021-06-24 | Thk株式会社 | Robot |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10676279B1 (en) | Systems, methods, and storage units for article transport and storage | |
| US9187264B2 (en) | Apparatus, systems and methods for securing, loading and unloading parts using locking dunnage | |
| WO2020057571A1 (en) | Portable compact storage and sorting device, combined warehousing system, and assembly method thereof | |
| US9457970B1 (en) | Modular cross-docking system | |
| JP2020186133A (en) | Device for collecting unit from storage system | |
| EP3953116B1 (en) | Product manipulation tool and method of retrieving a container | |
| TWI651243B (en) | Transport system and its operation method | |
| TW201641232A (en) | Robot system | |
| ES2910073T3 (en) | Multi-arm robot for complex order picking tasks | |
| US20230062304A1 (en) | Systems, methods, and storage units for article transport and storage | |
| WO2019235555A1 (en) | Box assembling and packing system and controller for said system | |
| JP4007204B2 (en) | Robot system | |
| JP2024537129A (en) | Multi-mode Robot End-effector | |
| Baldassarri et al. | Development of a mobile robotized system for palletizing applications | |
| WO2024135223A1 (en) | Robot and gripping unit | |
| WO2010096937A1 (en) | Apparatus, systems and methods for securing, loading and unloading parts using locking dunnage | |
| JPH03239487A (en) | Automatic assembler provided with visual sense | |
| US20230107488A1 (en) | Stack containment structure | |
| US20230303354A1 (en) | Mobile reel transport device for component reel packaging system | |
| KR20240089485A (en) | Order processing systems and methods | |
| JP7423194B2 (en) | Mobile containment device and delivery method using the same | |
| JP7339762B2 (en) | MOBILE CONTAINING DEVICE AND ROBOT CONTROL METHOD | |
| JP7541237B2 (en) | Automated guided vehicles | |
| JPH085961Y2 (en) | Robot system for article palletizing | |
| BE1031081B1 (en) | A BIN PICKING SYSTEM, ARRANGEMENT AND SETUP INCLUDING METHODS FOR ITS USE |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 23906592 Country of ref document: EP Kind code of ref document: A1 |