WO2024111303A1 - 学習システム、学習方法およびプログラム - Google Patents
学習システム、学習方法およびプログラム Download PDFInfo
- Publication number
- WO2024111303A1 WO2024111303A1 PCT/JP2023/037803 JP2023037803W WO2024111303A1 WO 2024111303 A1 WO2024111303 A1 WO 2024111303A1 JP 2023037803 W JP2023037803 W JP 2023037803W WO 2024111303 A1 WO2024111303 A1 WO 2024111303A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- image
- learning
- similar
- difference
- robot
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images







Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T7/00—Image analysis
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V10/00—Arrangements for image or video recognition or understanding
- G06V10/70—Arrangements for image or video recognition or understanding using pattern recognition or machine learning
- G06V10/72—Data preparation, e.g. statistical preprocessing of image or video features
Definitions
- This disclosure relates to a learning system, a learning method, and a program for a robot control system that controls a robot.
- Patent document 1 describes a system for generating a training dataset.
- Patent Document 1 requires the preparation of many sample datasets (specifically, pairs of images and labels) in advance. In addition, it is necessary to prepare images to be added as learning data (images to which labels are to be assigned), which is time-consuming to prepare the data. Furthermore, the labels assigned to the images may be incorrect, which may require manual confirmation or correction. Thus, the system described in Patent Document 1 has the problem that it is costly to generate learning datasets, and therefore costly to train the model.
- the present disclosure provides a learning system, learning method, and program that can learn a model for controlling a robot at low cost.
- the learning system is a learning system for a robot control system that controls a robot, and includes the following configuration. That is, the learning system according to one embodiment of the present disclosure includes a first image acquisition unit that acquires a first image in which a first object is captured, a second image acquisition unit that acquires a second image in which a second object is captured, a difference extraction unit that extracts the difference between the first image and the second image, a learning data selection unit that selects a difference similar image similar to the extracted difference from an image database, and a learning unit.
- the learning unit uses the selected difference similar image to perform first learning of a model for controlling the robot, and uses the second image to perform second learning of the model on which the first learning was performed.
- a learning method is a learning method executed by a learning system for a robot control system that controls a robot, and includes the following configuration. That is, the learning method according to another aspect of the present disclosure includes a first image acquisition step of acquiring a first image in which a first object is captured, a second image acquisition step of acquiring a second image in which a second object is captured, a difference extraction step of extracting a difference between the first image and the second image, a learning data selection step of selecting a difference similar image similar to the extracted difference from an image database, a first learning step of performing first learning of a model for controlling the robot using the selected difference similar image, and a second learning step of performing second learning of the model for which the first learning was performed using the second image.
- a program according to another aspect of the present disclosure is a program for causing a computer to execute the above-mentioned learning method.
- the learning system, learning method, and program disclosed herein make it possible to learn a model for controlling a robot at low cost.
- FIG. 1 is a block diagram showing an example of a learning system according to an embodiment.
- 11 is a flowchart showing an example of the operation of the learning system according to the embodiment.
- FIG. 13 is a diagram showing an example of a display for acquiring an image.
- FIG. 11 is a diagram illustrating a first example of a difference.
- FIG. 13 is a diagram showing an example of a similar portion.
- FIG. 13 is a diagram showing an example of a display for confirming acquired images and extracted differences and similarities.
- FIG. 13 is a diagram showing an example of a display for collecting difference similar images and similar portion similar images.
- FIG. 13 is a diagram showing an example of a display for starting learning.
- FIG. 13 illustrates an example of a display for updating parameters of a model.
- FIG. 11 is a diagram illustrating a second example of a difference.
- 13A and 13B are diagrams showing difference similar images similar to each of the differences at a plurality of locations in the second example.
- FIG. 13 is a diagram showing a difference similar image similar to the set of differences at a plurality of locations in the second example.
- FIG. 13 is a diagram illustrating a third example of a difference.
- FIG. 13 is a diagram showing a difference similar image similar to the difference of the third example.
- FIG. 13 is a diagram illustrating a fourth example of a difference.
- FIG. 13 is a diagram illustrating a fifth example of a difference.
- FIG. 13 is a diagram showing a difference similar image similar to the difference of the fifth example.
- FIG. 1 is a block diagram showing an example of a learning system 100 according to an embodiment. In addition to the learning system 100, FIG. 1 also shows an image database 200.
- Image database 200 is a large-scale image database, such as ImageNet.
- Image database 200 contains more than tens of millions of images and is used for research and development of object recognition software, etc.
- the learning system 100 is a system for a robot control system that controls a robot.
- the robot control system controls the robot to operate and to make the robot's operation act on an object.
- the robot is a manipulator
- the robot's operation is a grasping operation to grasp an object, or an insertion operation to insert an object into an insertion port of the object. Since the shape of the object varies depending on the type, etc., in order to make the robot perform such an operation, it is necessary to correctly recognize the object. Therefore, the learning system 100 learns a model for controlling the robot.
- This model is, for example, a model for controlling the robot's operation to act on an object, and is a recognition model of the object.
- the robot can accurately grasp the object or accurately insert an object into the object using the output control information.
- the learning system 100 comprises a first image acquisition unit 101, a second image acquisition unit 102, an extraction unit 103, a learning data selection unit 104, and a learning unit 105.
- the learning system 100 is a computer including a processor and a memory.
- the memory is a ROM (Read Only Memory) and a RAM (Random Access Memory), etc., and can store a program executed by the processor.
- the first image acquisition unit 101, the second image acquisition unit 102, the extraction unit 103, the learning data selection unit 104, and the learning unit 105 are realized by a processor that executes a program stored in the memory, etc.
- the learning system 100 may be provided with an interface such as a display or a touch panel display, or may be communicatively connected to such an interface provided outside the learning system 100.
- the learning system 100 may also be provided with a camera, or may be communicatively connected to a camera provided outside the learning system 100.
- the learning system 100 may be a computer consisting of a single housing.
- the learning system 100 may be mounted on a robot control system.
- the learning system 100 may be a server. Note that the components of the learning system 100 may be located on a single server, or may be distributed across multiple servers.
- the first image acquisition unit 101 acquires a first image in which a first object is captured.
- the second image acquisition unit 102 acquires a second image in which a second object is captured.
- the first image acquisition unit 101 and the second image acquisition unit 102 acquire images taken by a camera from the camera.
- the camera may be, but is not limited to, a web camera or an industrial camera.
- the extraction unit 103 extracts the difference between the first image and the second image.
- the extraction unit 103 is an example of a difference extraction unit.
- the extraction unit 103 also extracts similar parts between the first image and the second image.
- the extraction unit 103 is an example of a similar part extraction unit.
- the learning data selection unit 104 selects difference similar images that are similar to the extracted difference from the image database.
- the learning unit 105 uses the selected differential similar image to perform a first learning of a model for controlling the robot, and uses the second image to perform a second learning of the model from which the first learning was performed.
- the first image acquisition unit 101 acquires a first image in which a first object appears (step S11), and the second image acquisition unit 102 acquires a second image in which a second object appears (step S12).
- the second object is a new product for the first object.
- the first object is also called an old product
- the second object is also called a new product.
- the first object may be a regular product, and the second object may be a collaboration product.
- the first object may be a regular product, and the second object may be a limited-time product.
- the first object may be a regular product, and the second object may be a product with a different color.
- Step S11 may be performed after step S12, or steps S11 and S12 may be performed in parallel.
- FIG. 3 is a diagram showing an example of a display for acquiring an image.
- a display as shown in FIG. 3 is performed on an interface such as a display, and the first image and the second image are acquired.
- the first image acquisition unit 101 In order for the first image acquisition unit 101 to acquire an image of the old product, for example, the user operates (such as by touching or clicking) the "Old Product” button on the interface and adjusts the position of the camera or the old product so that the old product is captured in the camera view. Then, when the user operates the "Photograph” button on the interface, the first image acquisition unit 101 can acquire an image of the old product. Also, when the user operates the "Redo" button on the interface, the image of the old product can be reacquired.
- the user operates a "New Product” button on the interface and adjusts the position of the camera or the new product so that the new product is captured in the camera view. Then, the user operates a "Photograph” button on the interface, which allows the second image acquisition unit 102 to acquire an image of the new product. The user can also operate a "Redo” button on the interface to reacquire an image of the new product.
- the extraction unit 103 extracts the differences between the first image and the second image (step S13).
- the differences are parts that exist in the new product but do not exist in the old product. For example, when the first image and the second image are acquired, the differences are automatically extracted and displayed in the "Differences" section on the interface shown in FIG. 3.
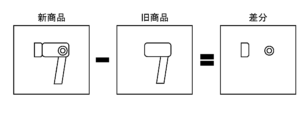
- Figure 4 shows a first example of the difference.
- the first object and the second object are a dryer
- the first object is an old product of a dryer
- the second object is a new product of a dryer.
- the part that exists only in the new product is extracted as the difference.
- the extraction unit 103 extracts similar parts between the first image and the second image (step S14).
- the similar parts are parts that are common to both the new product and the old product. For example, when the first image and the second image are acquired, the similar parts are automatically extracted and displayed in the "Similar Parts" area on the interface shown in FIG. 3.
- Figure 5 shows an example of a similar part.
- FIG. 6 is a diagram showing an example of a display for confirming an acquired image and extracted differences and similar parts. For example, when a first image and a second image are acquired and differences and similar parts are extracted, a display such as that shown in FIG. 6 is made on the interface.
- the user If there is no problem with the images of the new product, the old product, the differences, and the similar parts displayed on the interface, the user operates the "Yes” button on the interface. This results in selection of similar difference images and similar part images. Also, if there is no problem with any of the images of the new product, the old product, the differences, and the similar parts displayed on the interface, the user operates the "No” button on the interface. This results in the images of the new product and the old product being obtained again, and the differences and similar parts being extracted again.
- the learning data selection unit 104 selects a difference-similar image from the image database 200 that is similar to the extracted difference (step S15). For example, the learning data selection unit 104 calculates the similarity between the image included in the image database 200 and the difference, and selects an image whose similarity is equal to or greater than a predetermined threshold as a difference-similar image.
- the similarity is the degree of similarity between the pixel value of each pixel of the image included in the image database 200 and the pixel value of each pixel of the difference.
- the similarity may be calculated from the ratio between the average pixel value of each pixel of the images included in the image database 200 and the average pixel value of each pixel of the difference.
- the learning data selection unit 104 also selects similar-part images from the image database 200 that are similar to the extracted similar parts (step S16). For example, the learning data selection unit 104 calculates the similarity between the images included in the image database 200 and the similar parts, and selects images whose similarity is equal to or greater than a predetermined threshold as similar-part images. For example, the similarity is the degree of similarity between the pixel values of each pixel of the images included in the image database 200 and the pixel values of each pixel of the similar parts. For example, the similarity may be calculated from the ratio between the average pixel value of each pixel of the images included in the image database 200 and the average pixel value of each pixel of the similar parts.
- step S13 may be performed after step S14, or step S15 may be performed after step S16.
- the processes may be performed in the order of step S13, step S15, step S14, and step S16, or the processes may be performed in the order of step S14, step S16, step S13, and step S15.
- FIG. 7 is a diagram showing an example of a display for collecting difference similar images and similar part similar images. For example, a display such as that shown in FIG. 7 is performed on an interface, and difference similar images and similar part similar images are selected (collected) from the image database 200.
- the user operates the "Yes" button under "Collect difference similar images?" on the interface.
- the user can specify the similarity or number of images to be collected by inputting the similarity or number of images. For example, if the similarity is input as 80%, images contained in the image database 200 that have a similarity to the difference of 80% or more will be collected as difference similar images. Also, if the number is input as 100, 100 images from the images contained in the image database 200, starting with those with the highest similarity to the difference, will be collected as difference similar images.
- the user operates the "Yes" button under "Collect similar images of similar parts?" on the interface.
- the user can specify the similarity or number of images to be collected by inputting the similarity or number of images to be collected. For example, if the similarity is input as 80%, images contained in the image database 200 that have a similarity of 80% or more with the similar parts will be collected as similar part and similar images. Also, if the number is input as 100, 100 images from the images contained in the image database 200, starting with those with the highest similarity with the similar parts, will be collected as similar part and similar images.
- the learning unit 105 uses the selected similar part similar image to perform third learning of the model for controlling the robot (step S17).
- the third learning is unsupervised learning, specifically, self-supervised learning. Because unsupervised learning (for example, self-supervised learning) is used to learn the model, labels are not required for the similar part similar image. In self-supervised learning, only the convolutional layer in the model is trained using unlabeled similar part similar images. Therefore, in the third learning, the features of the similar parts can be learned with high accuracy without labels by self-supervised learning.
- the learning unit 105 uses the selected difference similarity image to perform first learning of a model for controlling the robot (step S18). At this time, the learning unit 105 performs first learning of the model on which the third learning has been performed.
- the first learning is unsupervised learning, specifically, self-supervised learning. Since unsupervised learning (for example, self-supervised learning) is used to learn the model, labels are not required for the difference similarity image. In self-supervised learning, only the convolution layer in the model is trained using unlabeled difference similarity images. Therefore, in the first learning, the features of the difference can be learned with high accuracy without labels by self-supervised learning.
- the similarity parts between the first image and the second image that is, the similarity parts between the old product and the new product
- the details of the new product can be learned by learning the difference between the old product and the new product.
- FIG. 8 is a diagram showing an example of a display for starting learning. For example, a display such as that shown in FIG. 8 is displayed on the interface, and the third learning or the first learning is started.
- the user operates the "Yes” button under "First stage: Train with similar images of similar parts?" on the interface. If the model for controlling the robot has been trained for the old product, the user operates the "No” button under "First stage: Train with similar images of similar parts?". If difference training is to be performed, the user operates the "Yes” button under "Second stage: Train with similar images of differences?" on the interface. If difference training is not to be performed, the user operates the "No” button under "Second stage: Train with similar images of differences?" on the interface. Then, the user operates the "Start training" button to start at least one of the third training and the first training of the model. For example, FIG. 8 shows an example in which the third training is not performed and the first training is performed.
- the learning unit 105 uses the second image to perform second learning of the model on which the first learning has been performed (step S19).
- the second learning is supervised learning.
- the parameters of the entire convolutional layer and fully connected layer in the trained model on which at least the first learning has been performed are updated. Therefore, in the second learning, learning can be performed by supervised learning to distinguish new products from new products.
- FIG. 9 is a diagram showing an example of a display for updating model parameters. For example, a display such as that shown in FIG. 9 is displayed on the interface to update the model parameters.
- the user operates the "Yes” button on the interface. This allows the parameters of the entire convolutional and fully connected layers of the model to be updated using a second image that shows a new product (e.g., an image labeled "new product").
- a new product e.g., an image labeled "new product”
- the overall image of the old product and the new product can be learned by learning about the similarities between the first image and the second image, i.e., the similarities between the old product and the new product.
- the details of the new product can be learned by learning about the differences between the old product and the new product.
- Figure 10 shows a second example of the difference.
- the first object in the first image is a regular product
- the second object in the second image is a collaboration product
- the collaboration product is a regular product to which a pattern has been added.
- the portion of the pattern that is only present in the collaboration product is extracted as the difference.
- differences exist in multiple locations. Specifically, as shown in FIG. 10, there are two differences, one between a face pattern and one between a lightning pattern.
- the learning data selection unit 104 may have a mode for selecting a difference similar image that is similar to each of the differences in the multiple locations, and a mode for selecting a difference similar image that is similar to a set of differences in the multiple locations. For example, these modes are selected by the user via an interface, etc.
- the difference similar image selected by the learning data selection unit 104 in the mode of selecting a difference similar image for each of the differences in multiple locations is explained using FIG. 11A
- the difference similar image selected by the learning data selection unit 104 in the mode of selecting a difference similar image similar to a set of differences in multiple locations is explained using FIG. 11B.
- FIG. 11A shows difference similar images for each of the differences at multiple locations in the second example.
- FIG. 11B shows a difference similar image that resembles the set of differences at multiple locations in the second example.
- a similar difference image to the face pattern is selected, and for a lightning pattern, a similar difference image to the lightning pattern is selected.
- a similar difference image to the set of a face pattern and a lightning pattern is selected.
- the learning data selection unit 104 may have the above two modes, it is possible to perform optimal learning depending on the content of the differences, etc.
- differences exist in multiple locations
- the learning data selection unit 104 is in a mode of selecting a similar difference image for each of the differences in the multiple locations, and as shown in Figures 7 and 8, a similar difference image is selected for each of the differences in the multiple locations.
- Figure 12 shows a third example of the difference.
- the first object in the first image is a regular product
- the second object in the second image is a limited-time product.
- the limited-time product has pictures and text that are different from those of the regular product. Since there are areas where the pictures and text overlap between the limited-time product and the regular product, as shown in FIG. 12, the pictures and text that are only present in the limited-time product but that are missing the above-mentioned overlapping areas are extracted as the difference.
- FIG. 13 shows a difference similar image similar to the difference in the third example.
- the learning data selection unit 104 is in a mode in which a difference similar image resembling each of the differences in multiple locations is selected.
- Figure 14 shows a fourth example of the difference.
- the difference when a calculation such as subtraction of pixel values is performed to extract the difference, the difference may contain a negative value. For example, if the old product has a part that does not exist in the new product, the difference will contain a negative value. In such a case, post-processing may be performed when extracting the difference to set the negative value to 0. This makes it possible to prevent unnecessary information from being included in the difference.
- Figure 15 shows a fifth example of the difference.
- the first object in the first image is a regular product
- the second object in the second image is a product with a different color.
- the product with a different color has a different color than the regular product.
- hatching with diagonal lines from the upper left to the lower right indicates red
- hatching from the upper right to the lower left indicates blue
- hatching with vertical lines indicates orange
- hatching with dots indicates gray.
- the regular product is blue
- the product with a different color is red.
- FIG. 16 shows a similar difference image similar to the difference in the fifth example.
- vertical hatching means orange dotted hatching means gray
- a difference similar image that is similar to the color difference is selected.
- a difference similar image with a shape similar to the shape of the difference or a color (yellow) similar to the color of the difference (orange) is selected.
- the learning system 100 includes a similar part extraction unit that extracts similar parts between the first image and the second image, but this is not limiting.
- the learning system 100 does not need to include a similar part extraction unit.
- the learning data selection unit 104 does not need to select similar part images from the image database.
- the learning unit 105 does not need to perform third learning of the model using similar part images.
- the learning data selection unit 104 has a mode in which, when differences exist in multiple locations, a difference similar image is selected for each of the differences in the multiple locations, and a difference similar image is selected that is similar to a set of differences in the multiple locations, but this is not limited thereto.
- the learning data selection unit 104 does not have to have the above two modes.
- the present disclosure can be realized not only as a learning system 100, but also as a learning method including steps (processing) performed by the components that make up the learning system 100.
- the learning method is a method executed by a learning system for a robot control system that controls a robot, and includes, as shown in FIG. 2, a first image acquisition step (step S11) of acquiring a first image showing a first object, a second image acquisition step (step S12) of acquiring a second image showing a second object, a difference extraction step (step S13) of extracting a difference between the first image and the second image, a learning data selection step (step S15) of selecting a difference similar image similar to the extracted difference from an image database, a first learning step (step S18) of performing first learning of a model for controlling the robot using the selected difference similar image, and a second learning step (step S19) of performing second learning of the model from which the first learning was performed using the second image.
- the steps in the learning method may be executed by a computer (computer system).
- the present disclosure can be realized as a program for causing a computer to execute the steps included in the image recognition method.
- the present disclosure can be realized as a non-transitory computer-readable recording medium, such as a CD-ROM on which the program is recorded.
- each step is performed by running the program using hardware resources such as a computer's CPU, memory, and input/output circuits.
- hardware resources such as a computer's CPU, memory, and input/output circuits.
- each step is performed by the CPU obtaining data from memory or input/output circuits, etc., performing calculations, and outputting the results of the calculations to memory or input/output circuits, etc.
- each component included in the learning system 100 of the above embodiment may be realized as a dedicated or general-purpose circuit.
- each component included in the learning system 100 of the above embodiment may be realized as an LSI (Large Scale Integration), which is an integrated circuit (IC).
- LSI Large Scale Integration
- IC integrated circuit
- the integrated circuit is not limited to an LSI, and may be realized by a dedicated circuit or a general-purpose processor.
- a programmable FPGA (Field Programmable Gate Array) or a reconfigurable processor that allows the connections and settings of circuit cells inside the LSI to be reconfigured may also be used.
- each component included in the learning system 100 may be integrated into an integrated circuit using that technology.
- this disclosure also includes forms obtained by applying various modifications to the embodiments that a person skilled in the art may conceive, and forms realized by arbitrarily combining the components and functions of the embodiments within the scope that does not deviate from the spirit of this disclosure.
- a learning system for a robot control system that controls a robot comprising: a first image acquisition unit that acquires a first image in which a first object is captured; a second image acquisition unit that acquires a second image in which a second object is captured; a difference extraction unit that extracts a difference between the first image and the second image; a learning data selection unit that selects a difference similar image similar to the extracted difference from an image database; and a learning unit, the learning unit using the selected difference similar image to perform first learning of a model for controlling the robot, and using the second image to perform second learning of the model for which the first learning was performed.
- a model for controlling a robot e.g., control for making the robot's operation act on an object
- unsupervised learning can be used as the first learning, and since a label is not required for the difference-similar image, there is no need to go to the trouble of labeling the image. Since the cost of preparing a learning data set is small in this way, a model for controlling a robot can be learned at low cost. As a result, it becomes possible to recognize the second object in the second image at low cost.
- the learning data selection unit have the above two modes, optimal learning can be performed depending on the content of the differences, etc.
- the degree of similarity for example, the degree of similarity of pixel values
- the difference features can be learned with high accuracy without labels through self-supervised learning, and in the second learning, learning can be performed to distinguish a second object from a second object through supervised learning.
- FIG. 5 A learning system according to any one of Technologies 1 to 4, further comprising a similar part extraction unit that extracts similar parts between the first image and the second image, the learning data selection unit selects similar part images similar to the extracted similar parts from an image database, the learning unit performs third learning of the model using the selected similar part images, and performs the first learning of the model on which the third learning has been performed.
- a similar part extraction unit that extracts similar parts between the first image and the second image
- the learning data selection unit selects similar part images similar to the extracted similar parts from an image database
- the learning unit performs third learning of the model using the selected similar part images, and performs the first learning of the model on which the third learning has been performed.
- the overall images of the first and second objects can be learned by learning about the similarities between the first and second images, i.e., the similarities between the first and second objects. Then, the details of the second object can be learned by learning about the differences between the first and second objects. By gradually learning the features of the object, such as by learning the overall image and then the details, the model's identification accuracy can be improved.
- the degree of similarity for example, the degree of similarity in pixel values
- self-supervised learning can be used to accurately learn the features of similar parts without labels.
- a learning method executed by a learning system for a robot control system that controls a robot including a first image acquisition step of acquiring a first image showing a first object, a second image acquisition step of acquiring a second image showing a second object, a difference extraction step of extracting a difference between the first image and the second image, a learning data selection step of selecting a difference similar image similar to the extracted difference from an image database, a first learning step of performing first learning of a model for controlling the robot using the selected difference similar image, and a second learning step of performing second learning of the model for which the first learning was performed using the second image.
- This provides a learning method that can learn a model for controlling a robot at low cost.
- This disclosure can be applied to robot control systems that control robots.
Landscapes
- Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Computer Vision & Pattern Recognition (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Artificial Intelligence (AREA)
- Health & Medical Sciences (AREA)
- Computing Systems (AREA)
- Databases & Information Systems (AREA)
- Evolutionary Computation (AREA)
- General Health & Medical Sciences (AREA)
- Medical Informatics (AREA)
- Software Systems (AREA)
- Multimedia (AREA)
- Image Analysis (AREA)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2024560013A JPWO2024111303A1 (https=) | 2022-11-22 | 2023-10-19 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2022-186475 | 2022-11-22 | ||
| JP2022186475 | 2022-11-22 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2024111303A1 true WO2024111303A1 (ja) | 2024-05-30 |
Family
ID=91195453
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2023/037803 Ceased WO2024111303A1 (ja) | 2022-11-22 | 2023-10-19 | 学習システム、学習方法およびプログラム |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JPWO2024111303A1 (https=) |
| WO (1) | WO2024111303A1 (https=) |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2018163524A (ja) * | 2017-03-27 | 2018-10-18 | 株式会社日立ハイテクノロジーズ | 画像処理システム及び画像処理を行うためのコンピュータープログラム |
| JP2021106044A (ja) * | 2016-03-09 | 2021-07-26 | 日本電気株式会社 | 画像処理装置、画像処理方法およびプログラム |
| JP2022076572A (ja) * | 2020-11-10 | 2022-05-20 | 株式会社日立製作所 | ロボット制御システム、ロボット制御方法及びプログラム |
| JP2022079331A (ja) * | 2020-11-16 | 2022-05-26 | 富士電機株式会社 | 商品認識用学習済みモデル生成方法及び商品認識用学習済みモデル生成装置 |
-
2023
- 2023-10-19 JP JP2024560013A patent/JPWO2024111303A1/ja active Pending
- 2023-10-19 WO PCT/JP2023/037803 patent/WO2024111303A1/ja not_active Ceased
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2021106044A (ja) * | 2016-03-09 | 2021-07-26 | 日本電気株式会社 | 画像処理装置、画像処理方法およびプログラム |
| JP2018163524A (ja) * | 2017-03-27 | 2018-10-18 | 株式会社日立ハイテクノロジーズ | 画像処理システム及び画像処理を行うためのコンピュータープログラム |
| JP2022076572A (ja) * | 2020-11-10 | 2022-05-20 | 株式会社日立製作所 | ロボット制御システム、ロボット制御方法及びプログラム |
| JP2022079331A (ja) * | 2020-11-16 | 2022-05-26 | 富士電機株式会社 | 商品認識用学習済みモデル生成方法及び商品認識用学習済みモデル生成装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2024111303A1 (https=) | 2024-05-30 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| Rocco et al. | Ncnet: Neighbourhood consensus networks for estimating image correspondences | |
| CN114240939B (zh) | 一种主板元器件外观缺陷检测方法、系统、设备及介质 | |
| US10452899B2 (en) | Unsupervised deep representation learning for fine-grained body part recognition | |
| WO2022247005A1 (zh) | 图像中目标物识别方法、装置、电子设备及存储介质 | |
| CN112418216B (zh) | 一种复杂自然场景图像中的文字检测方法 | |
| CN112446302B (zh) | 一种人体姿态检测方法、系统、电子设备和存储介质 | |
| US12009105B2 (en) | Learning apparatus and learning method for training neural network | |
| CN112906794A (zh) | 一种目标检测方法、装置、存储介质及终端 | |
| US11455502B2 (en) | Learning device, classification device, learning method, classification method, learning program, and classification program | |
| WO2022042348A1 (zh) | 医学影像标注方法和装置、设备及存储介质 | |
| CN108710893A (zh) | 一种基于特征融合的数字图像相机源模型分类方法 | |
| KR102601684B1 (ko) | 힌트 기반의 머신러닝 모델을 통해 목적 데이터에 대한 어노테이션 정보를 제공하는 방법 및 시스템 | |
| JP7206892B2 (ja) | 画像検査装置、画像検査のための学習方法および画像検査プログラム | |
| CN114202719A (zh) | 视频样本的标注方法、装置、计算机设备及存储介质 | |
| WO2020230244A1 (ja) | 学習方法、学習プログラム、および、学習装置 | |
| WO2021179751A1 (zh) | 图像处理方法和系统 | |
| CN112560925A (zh) | 一种复杂场景目标检测数据集构建方法及系统 | |
| CN113052194A (zh) | 一种基于深度学习的服装色彩认知系统及其认知方法 | |
| CN114723601A (zh) | 一种虚拟场景下的模型结构化建模及快速渲染方法 | |
| WO2024111303A1 (ja) | 学習システム、学習方法およびプログラム | |
| US8229224B2 (en) | Hardware management based on image recognition | |
| CN116385941B (zh) | 用于生成中间特征的神经网络的训练方法、装置及介质 | |
| Smith et al. | Clinical scene segmentation with tiny datasets | |
| CN114494239B (zh) | 病灶识别方法、装置、电子设备及计算机存储介质 | |
| US12051135B2 (en) | System and method for a precise semantic segmentation |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 23894315 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2024560013 Country of ref document: JP |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 23894315 Country of ref document: EP Kind code of ref document: A1 |