WO2023127052A1 - 復号装置、符号化装置、復号プログラム、符号化プログラム、復号方法および符号化方法 - Google Patents
復号装置、符号化装置、復号プログラム、符号化プログラム、復号方法および符号化方法 Download PDFInfo
- Publication number
- WO2023127052A1 WO2023127052A1 PCT/JP2021/048663 JP2021048663W WO2023127052A1 WO 2023127052 A1 WO2023127052 A1 WO 2023127052A1 JP 2021048663 W JP2021048663 W JP 2021048663W WO 2023127052 A1 WO2023127052 A1 WO 2023127052A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- layer
- unit
- points
- attribute
- decoding
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images








Classifications
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T9/00—Image coding
- G06T9/001—Model-based coding, e.g. wire frame
-
- G—PHYSICS
- G06—COMPUTING OR CALCULATING; COUNTING
- G06T—IMAGE DATA PROCESSING OR GENERATION, IN GENERAL
- G06T9/00—Image coding
- G06T9/40—Tree coding, e.g. quadtree, octree
Definitions
- the present invention relates to a decoding device, an encoding device, a decoding program, an encoding program, a decoding method, and an encoding method.
- Non-Patent Document 1 G.pcc (Geometry-based Point Coding Compression) disclosed in Non-Patent Document 1 is used for encoding the point cloud data.
- Non-Patent Document 1 the presence or absence of points included in the point cloud data is encoded using an octree structure called Octree for each unit called voxel.
- This octree structure has a hierarchical structure, and the lower the hierarchy, the more detailed the presence or absence of points.
- the information referred to exists, for example, in a hierarchy above a predetermined point.
- the upper layer such as the layer one level higher, and the layer one level higher, and partial access cannot be performed.
- the present invention has been made in view of the circumstances described above, and aims to provide a decoding apparatus, an encoding apparatus, a decoding program, an encoding program, a decoding method, and an encoding method that enable partial access. purpose.
- One aspect of the present invention is a decoding device that decodes encoded data obtained by encoding point cloud data, which is a set of points including attribute information, wherein the point cloud data is attribute information encoded in a hierarchical structure.
- the decoding unit decodes each decoding unit, which is a set of attribute information of a plurality of points belonging to consecutive layers, and the attribute information of points belonging to the highest layer of the first decoding unit is the first a prediction unit that makes a prediction by referring to any attribute information of a point belonging to the lowest layer of a second decoding unit containing attribute information belonging to a layer higher than the layer to which the attribute information included in the one decoding unit belongs; is a decoding device having
- One aspect of the present invention is a decoding program for decoding encoded data obtained by encoding point cloud data, which is a set of points including attribute information, wherein the point cloud data is attribute information encoded in a hierarchical structure. and a decoding function for decoding each decoding unit, which is a set of attribute information of a plurality of points belonging to consecutive layers, and the attribute information of points belonging to the highest layer of the first decoding unit, a prediction function for making a prediction by referring to any attribute information of a point belonging to the lowest layer of a second decoding unit containing attribute information belonging to a layer higher than the layer to which the attribute information included in one decoding unit belongs; is a decryption program with
- One aspect of the present invention is a decoding method for decoding encoded data obtained by encoding point cloud data, which is a set of points including attribute information, wherein the point cloud data is attribute information encoded in a hierarchical structure. are decoded for each decoding unit that is a set of attribute information of a plurality of points belonging to consecutive layers, and the attribute information of points belonging to the highest layer of the first decoding unit is the first decoding.
- This decoding method performs prediction by referring to any attribute information of points belonging to the lowest layer of the second decoding unit containing attribute information belonging to a layer higher than the layer to which the attribute information contained in the unit belongs.
- position information indicating the positions of points included in point cloud data is converted into a tree structure, the tree structure is divided in a depth direction to generate layer groups, and at least one of the layer groups a location information encoding unit that divides the points based on the location information to generate subgroups, encodes the subgroups to generate location data units corresponding to part of the location information, and the point cloud data.
- position information indicating the positions of points included in point cloud data is converted into a tree structure, the tree structure is divided in a depth direction to generate layer groups, and at least one of the layer groups a location information encoding function for generating subgroups by dividing one based on the location information, and encoding the subgroups to generate location data units corresponding to part of the location information;
- position information indicating the positions of points included in point cloud data is converted into a tree structure, the tree structure is divided in a depth direction to generate layer groups, and at least one of the layer groups splitting the points based on the position information to generate subgroups, encoding the subgroups to generate position data units corresponding to part of the position information, and attributes of points included in the point cloud data
- a level of detail is generated in order from the leaf side of the tree structure toward the root side to the layer overlapping with the parent attribute data unit in the depth direction.
- FIG. 4 is a diagram for explaining an example of processing in which the encoding device according to the first embodiment determines prediction reference points;
- 4 is a diagram for explaining an example of processing in which the encoding device according to the first embodiment determines prediction reference points; 4 is a flowchart showing an example of processing executed by the encoding device according to the first embodiment; It is a figure which shows an example of the hardware constitutions of the encoding apparatus which concerns on 2nd embodiment. It is a figure which shows an example of the software configuration of the encoding apparatus which concerns on 2nd embodiment. 9 is a flowchart showing an example of processing executed by the encoding device according to the second embodiment;
- FIG. 1 An encoding device, an encoding program, and an encoding method according to the first embodiment will be described with reference to FIGS. 1 to 6.
- FIG. 1 An encoding device, an encoding program, and an encoding method according to the first embodiment will be described with reference to FIGS. 1 to 6.
- FIG. 1 An encoding device, an encoding program, and an encoding method according to the first embodiment will be described with reference to FIGS. 1 to 6.
- FIG. 1 is a diagram showing an example of the hardware configuration of the encoding device according to the first embodiment.
- the encoding device 10a includes a processor 11a, a main memory device 12a, a communication interface 13a, an auxiliary memory device 14a, an input/output device 15a, and a bus 16a.
- the processor 11a is, for example, a CPU (Central Processing Unit), reads and executes the encoding program, and realizes each function of the encoding device 10a. Further, the processor 11a may read and execute a program other than the encoding program, and implement functions necessary for implementing each function of the encoding device 10a.
- a CPU Central Processing Unit
- the main storage device 12a is, for example, a RAM (Random Access Memory), and pre-stores an encoding program and other programs that are read and executed by the processor 11a.
- RAM Random Access Memory
- the communication interface 13a is an interface circuit for communicating with other devices via a network.
- the network is, for example, a WAN (Wide Area Network), a LAN (Local Area Network), the Internet, or an intranet.
- the other device referred to here is, for example, a lidar.
- the auxiliary storage device 14a is, for example, a hard disk drive (HDD: Hard Disk Drive), a solid state drive (SSD: Solid State Drive), a flash memory (Flash Memory), or a ROM (Read Only Memory).
- HDD Hard Disk Drive
- SSD Solid State Drive
- flash memory Flash Memory
- ROM Read Only Memory
- the input/output device 15a is, for example, an input/output port.
- an input device and an output device are connected to the input/output device 15a.
- the input device is, for example, a display, a touch panel display, a mouse, or a keyboard, and is used for operating the encoding device 10a and inputting data to the encoding device 10a.
- the output device is, for example, a display, a touch panel display, or a speaker, and is used by the encoding device 10a to present information to the user.
- the bus 16a connects the processor 11a, the main storage device 12a, the communication interface 13a, the auxiliary storage device 14a, and the input/output device 15a so that they can transmit and receive data to each other.
- FIG. 2 is a diagram showing an example of the software configuration of the encoding device according to the first embodiment.
- the encoding device 10a includes a point group acquisition unit 101a, a position information encoding unit 102a, a detail level structure generation unit 103a, a prediction reference point determination unit 104a, a prediction conversion unit 105a, and a coefficient encoding unit 106a.
- the point group acquisition unit 101a, the position information encoding unit 102a, the detail level structure generation unit 103a, the prediction reference point determination unit 104a, the prediction conversion unit 105a, and the coefficient encoding unit 106a are all stored in the main storage device 12a by the processor 11a. It is realized by reading and executing the encoded program.
- the point cloud acquisition unit 101a acquires point cloud data.
- the point cloud acquisition unit 101a acquires point cloud data obtained by scanning a three-dimensional space with a lidar.
- the point cloud acquisition unit 101a acquires point cloud data obtained by photographing a three-dimensional space with a camera.
- the position information encoding unit 102a converts the position information indicating the positions of the points included in the point cloud data into a tree structure.
- the positional information referred to here is, for example, information indicating the position of a point in a three-dimensional space.
- the tree structure referred to here is, for example, an octree.
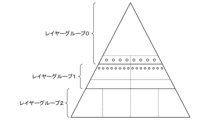
- FIG. 3 is a diagram showing an example of layer groups and subgroups according to the first embodiment. For example, as shown in FIG. 3, the position information encoding unit 102a divides the octree in the depth direction to generate layer group 0, layer group 1, and layer group 2.
- FIG. 3 is a diagram showing an example of layer groups and subgroups according to the first embodiment. For example, as shown in FIG. 3, the position information encoding unit 102a divides the octree in the depth direction to generate layer group 0, layer group 1, and layer group 2.
- FIG. 3 is a diagram showing an example of layer groups and subgroups according to the first embodiment. For example, as shown in FIG. 3, the position information encoding unit 102a divides the octree in the depth direction to generate layer group 0, layer group 1, and layer group 2.
- FIG. 3 is a diagram showing an example of layer groups and subgroups according to the first embodiment. For example, as shown in FIG. 3, the position information encoding unit 102a divides the octree
- the data is divided into a plurality of subgroups as shown in FIG. Take a configuration that performs decryption.
- the attribute of the highest layer of the subgroup of interest is configured to be predicted with reference to the attribute of the lowest layer of the adjacent subgroup above, for example, one level higher.
- the layer group closest to the root can be encoded and decoded independently.
- layer groups other than the root-most layer group can be encoded using the result of encoding the layer group one above itself.
- layer groups other than the layer group closest to the root can be decoded using the result of decoding the layer group one level above itself.
- the point group obtained by decoding layer groups other than the layer group closest to the root to the layer group closest to the leaf is a point group obtained by quantizing the point group obtained by decoding the entire tree structure.
- the position information encoding unit 102a divides at least one of the layer groups based on the position information to generate subgroups. For example, the position information encoding unit 102a sets a set of points whose X-coordinate value exceeds a predetermined threshold among the points included in the point cloud data as one subgroup. Let the set of points below the threshold be another subgroup.
- the position information encoding unit 102a divides the layer group 1 to generate subgroups 11 and 12, for example, as shown in FIG. Also, the position information encoding unit 102a divides the layer group 2 to generate subgroups 21, 22, 23 and 24, for example, as shown in FIG.
- the position information encoding unit 102a encodes the subgroups to generate position data units corresponding to part of the position information. For example, the location information encoding unit 102a encodes one subgroup to generate one location data unit. Alternatively, the location information encoder 102a encodes at least two subgroups to generate one location data unit.
- a position data unit includes a header and a body.
- the header is part of the syntax element (Syntax Element) and contains data necessary for decoding the position data unit.
- data includes, for example, data specifying a subgroup and data specifying a parent subgroup of its own subgroup. These data may be included in a syntax table separate from the header.
- the body includes data regarding position information and data regarding attribute information.
- the attribute information referred to here is information indicating the intensity, color, etc. of the reflected light of the laser beam irradiated by the lidar, and is associated with the points included in the point cloud data.
- one or more position data units are arranged to form position information code data.
- the position information code data can be processed to extract a specific position data unit using data contained in the header or the like.
- the level-of-detail structure generation unit 103a generates a level-of-detail structure (Levels of detail) for the point decoded from the corresponding position data unit for each attribute data unit.
- the detail level structure consists of N layers of detail level lists and N layers of refinement point lists. Below, the upper layer is called the root side, and the lower layer is called the leaf side.
- a level of detail list is a list of points contained in each level. The leaf-most level of detail list contains all points corresponding to this attribute data unit.
- a refinement point list is a list of points contained in a level of detail list. Another list of points not included in the detail level list on the root side. The leaf-most refinement point list is empty.
- the number N of levels of the detail level structure may be irrelevant to the number of layers, which is the depth of the tree structure representing the position information. However, if the tree structure is the same for layer M, by decoding each layer up to layer M level N, the quantized points corresponding to layer M can be decoded with attribute information.
- the number of points represented in the layer closest to the leaf of the tree structure and the number of points included in the level of detail list closest to the leaf of the level of detail structure are the same.
- the level-of-detail structure generation unit 103a sequentially generates a level-of-detail list from the leaf side to the root side up to the level overlapping the parent attribute data unit in the depth direction.
- the attribute data unit corresponds to part of attribute information indicating attributes of points included in the point cloud data.
- a parent attribute data unit is the parent attribute data unit of the attribute data unit that generates the level of detail.
- the level-of-detail structure generation unit 103a generates a level-of-detail list for each attribute data unit in order from the leaf side to the root side up to a level overlapping the parent attribute data unit by one level in the depth direction. do.
- the level-of-detail structure generation unit 103a acquires a point group obtained by decoding the position data unit closest to the root. These points correspond to the finest levels of the level of detail structure. Then, the level-of-detail structure generation unit 103a performs sub-sampling sequentially from this level toward the root side of the attribute data unit for which the level of detail is to be generated, and generates the level of detail of the attribute data unit. Any subsampling method is acceptable. For example, a method of dividing blocks according to levels and selecting a point closest to the center of each block may be used.
- the detail level of the attribute data unit and the layer of the tree structure of the position data unit have a one-to-one correspondence relationship, and are included in the detail level list of each level.
- the number of points corresponds to the number of nodes at the corresponding depth of the tree structure.
- the level-of-detail structure generation unit 103a acquires a point group obtained by decoding a position data unit that is neither the root side nor the leaf side. Then, the level-of-detail structure generation unit 103a performs sub-sampling on this point group in order from the most leaf side to the root side, and generates the level of detail of the attribute data unit up to the level overlapping with the parent attribute data unit. .
- the block division method described above when the level of detail structure of a certain parent attribute data unit and the level of detail of a certain child attribute data unit overlap by one, the most leaf-side level of the parent attribute data unit is the same as the block size corresponding to the root-most level of the child attribute data unit.
- the node corresponding to the point included in the rootmost level of detail list of the child attribute data unit is the leaf node of the tree structure corresponding to the point included in the leafmost level of detail list of the parent attribute data unit.
- the level-of-detail structure generation unit 103a performs similar processing to generate detail levels for attribute data units corresponding to all position data units.
- the predicted reference point determination unit 104a determines, for each point included in the refinement point list of each level, the point included in the detailed level list of the level on the root side from this level or the most detailed level list of the parent attribute data unit. Determine the predicted reference point from among the points contained in the level of detail list of the leaf side level.
- FIG. 4 and 5 are diagrams for explaining an example of the process of determining prediction reference points by the encoding device according to the first embodiment.
- the most root level points of the subgroup 11 shown in FIG. 3 and the most root level points of the subgroup 12 shown in FIG. 3 are indicated by white circles.
- the dashed arrows in FIG. 5 represent prediction references.
- the solid arrows in FIG. 5 represent subsampling. In other words, points connected by solid lines are the same points.
- the prediction reference point determination unit 104a determines prediction reference points for the attribute data units of subgroup 11 shown in FIG.
- a prediction reference point can be selected from among the leaf-most detail level list of the data unit.
- the predicted reference point determination unit 104a selects a predicted reference point from the reference candidate list for each of the points included in the refinement point list from the level one leaf side of the most root side to the level closest to the leaf side. do.
- a reference candidate list for example, a detailed level list of levels one root side from each level is used.
- a method for selecting the prediction reference point is, for example, neighborhood search based on the spatial distance from the prediction target point.
- the predicted reference point determination unit 104a may use the detail level list of the level closest to the leaf side of the parent attribute data unit as the reference candidate list at all levels for attribute data units other than the root side. .
- the same method as the method described above may be used as the method of selecting prediction reference points, or another method may be used. For example, assuming that a tree structure node corresponding to a prediction target point has a parent-child relationship or an ancestor-descendant relationship with a tree structure node corresponding to any point in the reference candidate list, select a point as a predicted reference point, and so on.
- a search may be performed using the tree structure used when encoding the position data unit, or matching using a Morton code may be performed.
- each code is represented by bits corresponding to the depth of the ancestor node. If you shift right by a few minutes, the shifted code will match. By using this, it is possible to quickly select the point corresponding to the parent of the prediction target point from the reference candidate list. For example, a high-speed search is possible by creating a table whose keys are the shifted Morton codes and hash values generated therefrom for all points in the reference candidate list.
- each list uses the Morton code corresponding to the position coordinates of the point. Since the positions of the corresponding points in each list match by sorting them, this may be used to determine the predicted reference point.
- the subgroup corresponding to the child attribute data block occupies the points included in the leaf-most level of detail list of the parent attribute data block. This relationship holds when a list of points within the three-dimensional space is taken as a reference candidate list.
- the prediction reference point determination unit 104a belongs to the same layer group as the attribute data unit that determines the prediction reference point, is already encoded by the position information encoding unit 102a, and is a subgroup different from the attribute data unit. may be used as the reference candidate list.
- the prediction reference point determination unit 104a selects the predicted
- the reference candidate list may be a detailed level list at the same level as the attribute data unit that determines the reference point.
- the prediction reference point determination unit 104a selects the most detailed level list of attribute data units that have already been encoded by the position information encoding unit 102a and belong to a different subgroup from the attribute data unit.
- the detail level list on the leaf side may be used as the reference candidate list.
- the prediction reference point determination unit 104a lists these prediction reference points and generates a prediction reference list.
- the predictive transform unit 105a performs predictive transform using the predictive reference points for each attribute data unit to generate a predictive value.
- the predicted value is a value related to point attribute information included in the point cloud data.
- the predictive conversion method referred to here is not particularly limited.
- the predictive transform unit 105a may employ lifting transform as a predictive transform method.
- the predictive conversion unit 105a sequentially calculates the weighted sum of the points included in the predictive reference list from the level closest to the leaf among the detail levels of the attribute data unit for which the predictive value is generated.
- Prediction conversion is executed by generating a predicted value of attribute information of the attribute data unit and updating the attribute information of each point using the predicted value. These weights are also determined, for example, based on the distance between each point and the predicted reference point.
- the coefficient encoding unit 106a encodes the attribute data unit by executing coefficient encoding using predicted values generated by predictive transformation as transform coefficients. Also, the coefficient encoding method referred to here is not particularly limited.
- FIG. 6 is a flowchart showing an example of processing executed by the encoding device according to the first embodiment.
- step S11 the point cloud acquisition unit 101a acquires point cloud data.
- step S12 the location information encoding unit 102a generates layer groups, subgroups, and location data units.
- step S13 the level-of-detail structure generation unit 103a sequentially generates levels of detail for each attribute data unit from the leaf side toward the root side of the tree structure up to the layer overlapping the parent attribute data unit in the depth direction.
- step S14 the predicted reference point determination unit 104a determines predicted reference points in order from the leaf side of the tree structure toward the root side for each attribute data unit.
- step S15 the predictive transform unit 105a performs predictive transform using the predictive reference points for each attribute data unit to generate a predictive value.
- step S16 the coefficient encoding unit 106a encodes the attribute data unit using the predicted values generated by the predictive transform as transform coefficients.
- the encoding device 10a includes a position information encoding unit 102a, a detail level structure generation unit 103a, and a prediction reference point determination unit 104a.
- the position information encoding unit 102a converts the position information indicating the positions of points included in the point cloud data into a tree structure, divides the tree structure in the depth direction to generate layer groups, and generates layer groups. is divided based on the position information to generate subgroups, and the subgroups are encoded to generate position data units corresponding to part of the position information.
- the level-of-detail structure generation unit 103a generates levels of detail for each attribute data unit in order from the leaf side toward the root side of the tree structure, up to a level overlapping the parent attribute data unit in the depth direction.
- the predicted reference point determiner 104a includes, for each attribute data unit, sequentially from the root side of the tree structure toward the leaves side, for each point that was not subsampled when the level of detail was generated, these points are included. Determine the predicted reference points in the same layer as the current layer or in a layer closer to the root than the layer containing these points.
- the encoding device 10a can enable partial access.
- the encoding device 10a determines prediction reference points in all layers by referring to the detail level list of the parent attribute data unit. This allows the encoding device 10a to execute predictive transformations at each level in parallel.
- the encoding device 10a belongs to the same layer group as the attribute data unit for determining the prediction reference point, has already been encoded by the position information encoding unit 102a, and is the attribute data unit for determining the prediction reference point.
- a prediction reference point is determined by referring to the level of detail of attribute data units belonging to different subgroups. Thereby, the encoding device 10a can refer to the data of another subgroup when predicting the attribute information, and can predict the attribute information more accurately.
- FIG. 7 to 9 An encoding device, an encoding program, and an encoding method according to the second embodiment will be described with reference to FIGS. 7 to 9.
- FIG. The encoding device according to the second embodiment differs from the encoding device according to the first embodiment in the process of generating detail levels. Therefore, in the description of the second embodiment, the differences from the first embodiment will be mainly described, and the description of the same content as the first embodiment will be omitted as appropriate.
- FIG. 7 is a diagram showing an example of the hardware configuration of an encoding device according to the second embodiment.
- the encoding device 10b includes a processor 11b, a main memory device 12b, a communication interface 13b, an auxiliary memory device 14b, an input/output device 15b, and a bus 16b.
- the processor 11b is, for example, a CPU, reads and executes an encoding program, and implements each function of the encoding device 10b. Also, the processor 11b may read and execute a program other than the encoding program, and implement functions necessary for implementing each function of the encoding device 10b.
- the main storage device 12b is, for example, a RAM, and pre-stores an encoding program and other programs that are read and executed by the processor 11b.
- the communication interface 13b is an interface circuit for communicating with other devices via a network.
- Other devices referred to here are, for example, lidars.
- the auxiliary storage device 14b is, for example, a hard disk drive, solid state drive, flash memory, or ROM.
- the input/output device 15b is, for example, an input/output port.
- an input device and an output device are connected to the input/output device 15b.
- the bus 16b connects the processor 11b, the main storage device 12b, the communication interface 13b, the auxiliary storage device 14b, and the input/output device 15b so that they can transmit and receive data to each other.
- FIG. 8 is a diagram showing an example of the software configuration of the encoding device according to the second embodiment.
- the encoding device 10b includes a point group acquisition unit 101b, a position information encoding unit 102b, a detail level structure generation unit 103b, a prediction reference point determination unit 104b, a prediction conversion unit 105b, and a coefficient encoding unit 106b.
- the point group acquisition unit 101b, the position information encoding unit 102b, the detail level structure generation unit 103b, the prediction reference point determination unit 104b, the prediction conversion unit 105b, and the coefficient encoding unit 106b are all stored in the main storage device 12b by the processor 11b. It is realized by reading and executing the encoded program.
- the point cloud acquisition unit 101b acquires point cloud data.
- the position information encoding unit 102b converts the position information indicating the positions of the points included in the point cloud data into a tree structure.
- the tree structure referred to here is, for example, an octree.
- the positional information encoding unit 102b divides the tree structure in the depth direction to generate layer groups, and divides at least one of the layer groups based on the positional information to generate subgroups. Then, the position information encoding unit 102b encodes the subgroups to generate position data units corresponding to part of the position information.
- the level-of-detail structure generation unit 103b generates a level-of-detail list for each attribute data unit in order from the leaf side toward the root side to a level that does not overlap with the parent attribute data unit in the depth direction.
- the level-of-detail structure generator 103b performs similar processing to generate a level-of-detail list for attribute data units corresponding to all position data units.
- the prediction reference point determination unit 104b determines whether the points in the refinement point list at each level are at the same level as the level containing these points or closer to the root side than the level containing these points. Determine the predicted reference point from the level of detail list for the level of .
- the predicted reference point determination unit 104b determines predicted reference points for each of the refinement points from the root-most lower level to the leaf-most. In addition, the prediction reference point determination unit 104b determines prediction reference points for each refinement point from the level closest to the root to the level closest to the leaf for attribute data units other than the root.
- the predicted reference point determination unit 104b may use the detail level list of the most leaf side level of the parent attribute data unit as the reference candidate list at all levels for the attribute data units other than the root side. .
- the prediction reference point determination unit 104b belongs to the same layer group as the attribute data unit that determines the prediction reference point, is already encoded by the position information encoding unit 102b, and is a subgroup different from the attribute data unit.
- the predicted reference point may be determined with reference to a level of detail list of attribute data units belonging to .
- the prediction reference point determination unit 104b selects the prediction reference point from among the levels of attribute data units that have already been encoded by the position information encoding unit 102b and belong to a different subgroup from the attribute data unit. may refer to a level of detail list at the same level as the attribute data unit that determines the
- the prediction reference point determination unit 104b selects the most detailed layer among the levels of attribute data units that have already been encoded by the position information encoding unit 102b and belong to a subgroup different from the attribute data unit. You may refer to the verbosity level list.
- the prediction reference point determination unit 104b lists these prediction reference points and generates a prediction reference list.
- the predictive transform unit 105b performs predictive transform using the predictive reference points for each attribute data unit to generate a predictive value.
- the predictive conversion method referred to here is not particularly limited.
- the coefficient encoding unit 106b encodes the attribute data unit by executing coefficient encoding using predicted values generated by predictive transformation as transform coefficients.
- the coefficient encoding method referred to here is not particularly limited.
- FIG. 9 is a flowchart showing an example of processing executed by the encoding device according to the second embodiment.
- step S21 the point cloud acquisition unit 101b acquires point cloud data.
- step S22 the location information encoding unit 102b generates layer groups, subgroups, and location data units.
- step S23 the level-of-detail structure generation unit 103b sets the level of detail for each attribute data unit to a layer that does not overlap with the parent attribute data unit in the depth direction in order from the leaf side of the tree structure toward the root side. Generate.
- step S24 the predicted reference point determination unit 104b determines predicted reference points in order from the leaf side of the tree structure toward the root side for each attribute data unit.
- step S25 the predictive transform unit 105b performs predictive transform using the predictive reference points for each attribute data unit to generate a predictive value.
- step S26 the coefficient encoding unit 106b encodes the attribute data unit using the predicted values generated by the predictive transform as transform coefficients.
- the encoding device 10b includes a position information encoding unit 102b, a detail level structure generation unit 103b, and a prediction reference point determination unit 104b.
- the position information encoding unit 102b converts the position information indicating the positions of points included in the point cloud data into a tree structure, divides the tree structure in the depth direction to generate layer groups, and generates layer groups. is divided based on the position information to generate subgroups, and the subgroups are encoded to generate position data units corresponding to part of the position information.
- the level-of-detail structure generation unit 103b generates levels of detail for each attribute data unit in order from the leaf side toward the root side of the tree structure to layers that do not overlap with the parent attribute data unit in the depth direction.
- the predicted reference point determiner 104b includes, for each attribute data unit, sequentially from the root side of the tree structure toward the leaves side, for each point that was not subsampled when the level of detail was generated, these points are included. Determine the predicted reference points in the same layer as the current layer or in a layer closer to the root than the layer containing these points.
- the encoding device 10b can enable partial access. Note that for data units other than the rootmost attribute data unit, no level of detail list is generated, and for all points included in this unit, predictive reference points are selected from the level of detail list of the parent attribute data unit and encoded. may be performed.
- the decoding device is a device that decodes encoded data obtained by encoding point cloud data, which is a set of points including attribute information, and performs processing opposite to that of the encoding device 10a or 10b.
- the decoding device includes a decoding section and a prediction section.
- Point cloud data has attribute information encoded in a hierarchical structure.
- the decoding unit decodes each decoding unit, which is a set of attribute information of a plurality of points belonging to consecutive layers.
- the prediction unit is configured such that the attribute information of the point belonging to the highest layer of the first decoding unit is a second decoding including attribute information belonging to a layer higher than the layer to which the attribute information included in the first decoding unit belongs.
- Prediction is made by referring to any of the attribute information of points belonging to the lowest layer of the unit.
- the highest layer of the first decoding unit is one layer below the lowest layer of the second decoding unit.
- the first decoding unit has at least one decoding unit of the same hierarchy.
- At least part of the functions of the encoding device 10a and at least part of the functions of the encoding device 10b are LSI (Large Scale Integration), ASIC (Application Specific Integrated Circuit), FPGA (Field-Programmable Gate Array) , GPU (Graphics Processing Unit) or other hardware including circuitry.
- LSI Large Scale Integration
- ASIC Application Specific Integrated Circuit
- FPGA Field-Programmable Gate Array
- GPU Graphics Processing Unit
- at least part of the functions of the encoding device 10a and at least part of the functions of the encoding device 10b may be implemented by cooperation of software and hardware.
- these pieces of hardware may be integrated into one, or may be divided into a plurality of pieces.
- the effect of the embodiment of the present invention described above is the effect described as an example. Therefore, the embodiments of the present invention can have other effects that can be recognized by those skilled in the art from the above description of the embodiments, in addition to the effects described above.
Landscapes
- Engineering & Computer Science (AREA)
- Multimedia (AREA)
- Physics & Mathematics (AREA)
- General Physics & Mathematics (AREA)
- Theoretical Computer Science (AREA)
- Compression, Expansion, Code Conversion, And Decoders (AREA)
- Compression Or Coding Systems Of Tv Signals (AREA)
Priority Applications (6)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN202180105275.XA CN118475959A (zh) | 2021-12-27 | 2021-12-27 | 解码装置、编码装置、解码程序、编码程序、解码方法及编码方法 |
| JP2023570539A JP7783510B2 (ja) | 2021-12-27 | 2021-12-27 | 復号装置、復号方法および復号プログラム |
| EP21969936.0A EP4459555A4 (en) | 2021-12-27 | 2021-12-27 | DECODING DEVICE, CODING DEVICE, DECODING PROGRAM, CODING PROGRAM, DECODING METHOD AND CODING METHOD |
| PCT/JP2021/048663 WO2023127052A1 (ja) | 2021-12-27 | 2021-12-27 | 復号装置、符号化装置、復号プログラム、符号化プログラム、復号方法および符号化方法 |
| US18/724,120 US20250069272A1 (en) | 2021-12-27 | 2021-12-27 | Decoding device, coding device, decoding program, coding program, decoding method and coding method |
| JP2025203896A JP2026020320A (ja) | 2021-12-27 | 2025-11-26 | 復号装置、復号方法および復号プログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2021/048663 WO2023127052A1 (ja) | 2021-12-27 | 2021-12-27 | 復号装置、符号化装置、復号プログラム、符号化プログラム、復号方法および符号化方法 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2023127052A1 true WO2023127052A1 (ja) | 2023-07-06 |
Family
ID=86998356
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2021/048663 Ceased WO2023127052A1 (ja) | 2021-12-27 | 2021-12-27 | 復号装置、符号化装置、復号プログラム、符号化プログラム、復号方法および符号化方法 |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US20250069272A1 (https=) |
| EP (1) | EP4459555A4 (https=) |
| JP (2) | JP7783510B2 (https=) |
| CN (1) | CN118475959A (https=) |
| WO (1) | WO2023127052A1 (https=) |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2020071414A1 (ja) * | 2018-10-02 | 2020-04-09 | パナソニック インテレクチュアル プロパティ コーポレーション オブ アメリカ | 三次元データ符号化方法、三次元データ復号方法、三次元データ符号化装置、及び三次元データ復号装置 |
| WO2020213735A1 (ja) * | 2019-04-19 | 2020-10-22 | パナソニック インテレクチュアル プロパティ コーポレーション オブ アメリカ | 三次元データ符号化方法、三次元データ復号方法、三次元データ符号化装置、及び三次元データ復号装置 |
| WO2021140930A1 (ja) * | 2020-01-07 | 2021-07-15 | ソニーグループ株式会社 | 情報処理装置および方法 |
Family Cites Families (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6826368B2 (ja) * | 2016-01-14 | 2021-02-03 | キヤノン株式会社 | 符号化装置及びその制御方法 |
| WO2021256559A1 (ja) * | 2020-06-19 | 2021-12-23 | パナソニック インテレクチュアル プロパティ コーポレーション オブ アメリカ | 三次元データ符号化方法、三次元データ復号方法、三次元データ符号化装置、及び三次元データ復号装置 |
-
2021
- 2021-12-27 EP EP21969936.0A patent/EP4459555A4/en active Pending
- 2021-12-27 CN CN202180105275.XA patent/CN118475959A/zh active Pending
- 2021-12-27 US US18/724,120 patent/US20250069272A1/en active Pending
- 2021-12-27 JP JP2023570539A patent/JP7783510B2/ja active Active
- 2021-12-27 WO PCT/JP2021/048663 patent/WO2023127052A1/ja not_active Ceased
-
2025
- 2025-11-26 JP JP2025203896A patent/JP2026020320A/ja active Pending
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2020071414A1 (ja) * | 2018-10-02 | 2020-04-09 | パナソニック インテレクチュアル プロパティ コーポレーション オブ アメリカ | 三次元データ符号化方法、三次元データ復号方法、三次元データ符号化装置、及び三次元データ復号装置 |
| WO2020213735A1 (ja) * | 2019-04-19 | 2020-10-22 | パナソニック インテレクチュアル プロパティ コーポレーション オブ アメリカ | 三次元データ符号化方法、三次元データ復号方法、三次元データ符号化装置、及び三次元データ復号装置 |
| WO2021140930A1 (ja) * | 2020-01-07 | 2021-07-15 | ソニーグループ株式会社 | 情報処理装置および方法 |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP4459555A4 * |
Also Published As
| Publication number | Publication date |
|---|---|
| EP4459555A4 (en) | 2025-11-05 |
| CN118475959A (zh) | 2024-08-09 |
| JPWO2023127052A1 (https=) | 2023-07-06 |
| EP4459555A1 (en) | 2024-11-06 |
| JP2026020320A (ja) | 2026-02-06 |
| JP7783510B2 (ja) | 2025-12-10 |
| US20250069272A1 (en) | 2025-02-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| CN115380536B (zh) | 用于点云压缩的改进的预测编码 | |
| CN113256746B (zh) | 点云编解码的方法、装置和存储介质 | |
| CN113678466B (zh) | 用于预测点云属性编码的方法和设备 | |
| CN114467302B (zh) | 针对点云压缩的基于块的预测编码 | |
| CN114556429B (zh) | 针对点云压缩的预测编码 | |
| CN114981842B (zh) | 点云的树内几何量化 | |
| JP2022524689A (ja) | 点群属性コーディングの加重中央値を予測するための手法及びデバイス並びにコンピュータプログラム | |
| CN115086660B (zh) | 基于点云属性预测的解码、编码方法、解码器及编码器 | |
| JP2022516232A (ja) | フレーム間点群属性コーディングのための方法、装置及びコンピュータ・プログラム | |
| CN113259678B (zh) | 对点云信息进行编解码的方法和装置 | |
| JP7430792B2 (ja) | 属性情報の予測方法、エンコーダ、デコーダ及び記憶媒体 | |
| CN113544747B (zh) | 用于点云编解码的几何合并模式的方法和装置 | |
| CN113315977B (zh) | 点云信息解码的方法和装置 | |
| JP7786631B2 (ja) | 情報処理装置および方法 | |
| WO2021256486A1 (ja) | 点群復号装置、点群復号方法及びプログラム | |
| CN114096998A (zh) | 点云编解码中占用编码的上下文建模 | |
| KR20220122995A (ko) | 정보 처리 장치 및 방법 | |
| WO2023127052A1 (ja) | 復号装置、符号化装置、復号プログラム、符号化プログラム、復号方法および符号化方法 | |
| JP7553592B2 (ja) | 3dジオメトリを構築するための方法、装置およびプログラム | |
| Courbet et al. | Random accessible hierarchical mesh compression for interactive visualization | |
| RU2857819C2 (ru) | Способ кодирования и декодирования трехмерного облака точек, кодер и декодер | |
| CN119631408A (zh) | 用于编码和解码3d点云的方法、编码器及解码器 | |
| WO2024029348A1 (ja) | 情報処理装置および方法 | |
| HK40051204B (zh) | 对点云信息进行编解码的方法和装置 | |
| CN118946905A (zh) | 在基于几何形状的点云压缩中使用帧间预测利用基于动态的具有即时更新的最优二进制译码器(obuf)的八叉树占用译码进行占用译码 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 21969936 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2023570539 Country of ref document: JP |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 18724120 Country of ref document: US Ref document number: 202180105275.X Country of ref document: CN |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| ENP | Entry into the national phase |
Ref document number: 2021969936 Country of ref document: EP Effective date: 20240729 |
|
| WWP | Wipo information: published in national office |
Ref document number: 18724120 Country of ref document: US |