WO2021240684A1 - 学習装置、学習方法および学習プログラム - Google Patents
学習装置、学習方法および学習プログラム Download PDFInfo
- Publication number
- WO2021240684A1 WO2021240684A1 PCT/JP2020/020926 JP2020020926W WO2021240684A1 WO 2021240684 A1 WO2021240684 A1 WO 2021240684A1 JP 2020020926 W JP2020020926 W JP 2020020926W WO 2021240684 A1 WO2021240684 A1 WO 2021240684A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- learning
- learner
- skill
- state
- time
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images













Classifications
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09B—EDUCATIONAL OR DEMONSTRATION APPLIANCES; APPLIANCES FOR TEACHING, OR COMMUNICATING WITH, THE BLIND, DEAF OR MUTE; MODELS; PLANETARIA; GLOBES; MAPS; DIAGRAMS
- G09B7/00—Electrically-operated teaching apparatus or devices working with questions and answers
-
- G—PHYSICS
- G09—EDUCATION; CRYPTOGRAPHY; DISPLAY; ADVERTISING; SEALS
- G09B—EDUCATIONAL OR DEMONSTRATION APPLIANCES; APPLIANCES FOR TEACHING, OR COMMUNICATING WITH, THE BLIND, DEAF OR MUTE; MODELS; PLANETARIA; GLOBES; MAPS; DIAGRAMS
- G09B19/00—Teaching not covered by other main groups of this subclass
Definitions
- the present invention relates to a learning device, a learning method, and a learning program for learning a model that predicts a change in a learner's skill.
- Knowledge tracing visualizes the learner's skills to grasp the learning situation in real time, predicts whether or not the problem can be solved, and provides the optimum problem for the learner.
- the proficiency level of each student's learning content is grasped in detail to support effective review, and the exercises optimized for the proficiency level of each student's learning content are optimized.
- the test creation server that creates the collection is described.
- Non-Patent Document 1 describes a method of performing knowledge tracing in real time. The method described in Non-Patent Document 1 uses a recurrent neural network (RNN) to model student learning.
- RNN recurrent neural network
- Non-Patent Document 2 describes interpretable knowledge tracing by a probabilistic model having a non-compensated item response model.
- AI Artificial Intelligence
- a learning method in which the learner can independently decide what to study while interacting with the AI that is, a learning method in which the learner can independently master the AI.
- a learning method in which the learner can independently master the AI it is necessary to feed back information so that the learner can make a learning plan while grasping the transition of his / her own skill over the long term.
- the test creation server described in Patent Document 1 has " ⁇ (a circle indicating all correct answers)” and “ ⁇ (some incorrect answers) according to the ratio of the number of correct answers to the number of questions given in the small unit.
- the learning achievement rate is displayed in three stages: “(triangle indicating)” and “x (cross indicating all incorrect answers)”.
- the display content described in Patent Document 1 only displays the actual results of correct or incorrect answers, it is possible to grasp how much the skill for solving the question is satisfied. It is not possible.
- Non-Patent Document 1 and Non-Patent Document 2 the probability of solving the problem at the present time can be predicted based on the estimated learner's skill.
- the methods described in Non-Patent Document 1 and Non-Patent Document 2 do not consider predicting future changes in skills as learning progresses. Ultimately, it is preferable to obtain information on how to proceed with learning and how to improve skills in the future, rather than information on whether or not a specific problem can be solved.
- an object of the present invention is to provide a learning device, a learning method, and a learning program capable of learning a model that predicts a learner's long-term skill change.
- the learning device is a first learning means for generating a skill state sequence representing a time-series change of a learner's skill state by machine learning using the learning results of the learner, and is used by the learner for learning.
- the problem features that represent the characteristics of the problem that occurred, the user characteristics that represent the characteristics of the learner, and the time information that represents the time when the problem was solved are used as explanatory variables, and the state of the learner's skill represented by the skill state column is used as the objective variable. It is characterized by having a second learning means for learning a model.
- the computer In the learning method according to the present invention, the computer generates a skill state sequence representing the time-series change of the learner's skill state by machine learning using the learning results of the learner, and the computer uses the learner for learning.
- the problem features that represent the characteristics of the problem used, the user characteristics that represent the characteristics of the learner, and the time information that represents the time when the problem was solved are used as explanatory variables, and the state of the learner's skill represented by the skill state column is used as the objective variable. It is characterized by learning a model to do.
- the learning program according to the present invention is a first learning process that generates a skill state sequence representing a time-series change in a learner's skill state by machine learning using the learning results of the learner on a computer, and a learner.
- the problem characteristics that represent the characteristics of the problem used for learning, the user characteristics that represent the characteristics of the learner, and the time information that represents the time when the problem was solved are used as explanatory variables, and the state of the learner's skill represented by the skill state column is used. It is characterized in that a second learning process for learning a model as an objective variable is executed.
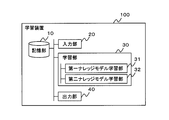
- FIG. 1 is a block diagram showing a configuration example of an embodiment of the learning device according to the present invention.
- the learning device 100 of the present embodiment includes a storage unit 10, an input unit 20, a learning unit 30, and an output unit 40.
- the storage unit 10 stores various information such as parameters, setting information, and log data used for processing by the learning device 100 of the present embodiment. Specifically, the storage unit 10 stores a learning record (hereinafter referred to as a learning correctness log) indicating whether or not a certain problem has been answered correctly. The contents of the learning correctness log will be described later. Further, the storage unit 10 may store each model generated by the learning unit 30 described later.
- a learning correctness log indicating whether or not a certain problem has been answered correctly. The contents of the learning correctness log will be described later.
- the storage unit 10 may store each model generated by the learning unit 30 described later.
- the learning device 100 may be configured to acquire various information from another device (for example, a storage server) via a communication network.
- the storage unit 10 does not have to store the above-mentioned information.
- the storage unit 10 is realized by, for example, a magnetic disk or the like.
- the input unit 20 receives input of various information used for processing by the learning unit 30.
- the input unit 20 may acquire various information from the storage unit 10, for example, or may accept input of various information acquired via the communication network.
- the input unit 20 accepts the input of the learner's time-series learning correctness log as learning data indicating the learning results. Specifically, the input unit 20 inputs learning data including data in which a problem and the correctness of the problem are associated with information representing a learner's characteristics (hereinafter, may be referred to as a user characteristic). accept.
- FIG. 2 is an explanatory diagram showing an example of learning data.
- the learning data illustrated in FIG. 2 shows that the learners 1 to N are associated with the correctness ( ⁇ , ⁇ ) for each problem.
- the user characteristics indicating the characteristics of each user may be held separately from the learning data.
- the learning unit 30 includes a first knowledge model learning unit 31 and a second knowledge model learning unit 32.
- the first knowledge model learning unit 31 generates a time-series change in the learner's skill state (hereinafter referred to as a skill state sequence) by machine learning using the learner's learning results.
- the state of the learner's skill is, for example, the proficiency level of the learner's skill.
- the first knowledge model learning unit 31 may generate a skill state sequence by using, for example, the method described in Non-Patent Document 2. Specifically, the first knowledge model learning unit 31 may generate a state in which the posterior probability is maximized under the given learning correctness log as a skill state column.
- the first knowledge model learning unit 31 may generate a feature of the problem used for learning (hereinafter, referred to as a problem feature vector).
- the first knowledge model learning unit 31 may generate a problem feature vector by using the method described in Non-Patent Document 2 as in the generation of the skill state sequence.
- the problem feature vector can be generated without depending on the learning results.
- a problem feature vector can be generated as a vector for problem i, where the i-th entry is 1 and the other entries are 0.
- This problem feature vector is a so-called one-hot vector ([0, ..., 1, ..., 0]) that identifies each problem.
- the first knowledge model learning unit 31 does not have to generate the problem feature vector.
- the skill state sequence of the present embodiment corresponds to the state transition probability (and the initial state probability) in the generation model of the uncompensated time series IRT (item response theory) described in Non-Patent Document 2. Therefore, the first knowledge model learning unit 31 may generate a skill state sequence by learning the model defined by the following equation 1. It should be noted that Equation 1 is a model for transitioning to the next state z j (t + 1) by the linear transformation D when the state z j (t) of the user j at the time t is given. Note that z j (t) is a random variable.
- Di (j, t) represents a linear transformation that changes the state according to the problem i solved by user j at time t
- ⁇ i (j, t + 1) represents Gaussian noise
- the second term on the right side is a bias term, which is a term representing a feature amount of the user j that can affect the state transition.
- x j, k (t + 1) is a covariate of state transitions, and any feature related to the learner is used as the user feature.
- user characteristics for example, the learner's attributes (for example, age, gender), motivation (whether or not he / she is interested in the subject), and the elapsed time since the learner j last learned the problem including skill k are assumed.
- Forgetting rate 2 ⁇ ( ⁇ / h) (where ⁇ is the elapsed time and h is the half-life) and the like.
- aggregated information of performance series may be used.
- the aggregated information for example, the number of answers up to 5 consecutive correct answers for each skill, information indicating the speed of acquisition, the result of the past test, and the like can be mentioned.
- ⁇ k T is a coefficient representing the characteristics of each skill, and for example, a large negative value is set for the coefficient of a skill that is easy to forget.
- ⁇ 0 and P 0 represent the mean and variance of the Gaussian distribution in the initial state of the learner, respectively.
- the vector containing a i and b i are included in the output probabilities described in Non-Patent Document 2 corresponds to the problem feature vectors of the present embodiment.
- a i is a vector representing the discriminating power of each skill in question i (slope)
- b i is the difficulty in question i. Therefore, the first knowledge model learning unit 31 may generate a problem feature vector by learning the model defined by the following equation 2.
- Qi (j, t) and k in Equation 2 indicate the correspondence between the problem i and the skill k, and if the skill k is necessary to solve the problem i, it becomes 1, and if it is not necessary, it becomes 0.
- the first knowledge model learning unit 31 may generate the problem feature vector as shown in Equation 3 below. For example, when problem 1 requires skill 1 and skill 2, the first knowledge model learning unit 31 sets 0 for the vector shown by the following equation 3 except for a 1 , a 2 , b 1 , and b 2. It suffices to generate such a feature vector.
- FIG. 3 is an explanatory diagram showing an example in which a problem and a necessary skill are associated with each other.
- a problem and a skill required to solve the problem are associated in a table format is shown.
- one skill may be required for each problem, or two or more skills may be required.
- the correspondence between the problem and the necessary skill is set in advance by the user or the like.
- the first knowledge model learning unit 31 may generate a skill state sequence by using, for example, the method described in Non-Patent Document 1.
- Skill status column of the present embodiment corresponds to the vector y t of the prediction probability of the time series described in Non-Patent Document 1.
- Y t described in Non-Patent Document 1 is a vector of length equal to the number of issues, each entry represents the probability that the learner correct the problem.
- the first knowledge model learning unit 31 may generate a vector y t of the prediction probability of the time series as a skill state column.
- the one-hot vector described in Non-Patent Document 1 corresponds to the problem feature vector of the present embodiment.
- the i-th entry can be generated as a vector of 1
- the other entries can be generated as a vector of 0.
- the one-hot vector ([0, ..., 1, ..., 0]) that identifies each problem may be generated in advance as the problem feature vector.
- the first knowledge model learning unit 31 does not have to generate the problem feature vector.
- the method of generating the skill state sequence and the problem feature vector by using the methods described in Non-Patent Document 1 and Non-Patent Document 2 has been described above.
- the method of generating the skill state sequence and the problem feature vector is not limited to the learning methods described in Non-Patent Document 1 and Non-Patent Document 2.
- the second knowledge model learning unit 32 generates a model that predicts the future skill state of the learner by machine learning using the skill state sequence and the problem feature vector. Specifically, the second knowledge model learning unit 32 learns a model in which the problem feature, the user feature, and the time information are the explanatory variables, and the skill state of the user is the objective variable.
- the skill status can be acquired from the skill status column generated by the first knowledge model learning unit 31.
- the problem feature may be acquired from the problem feature vector generated by the first knowledge model learning unit 31, and may be acquired from information generated by an arbitrary method based on the problem (for example, one-hot vector). May be good.
- the user characteristics are the same as the user characteristics when the first knowledge model learning unit 31 uses it for learning.
- the time information is information indicating the time when the learner solved the problem.
- the mode of the time information is arbitrary, and may be, for example, time information expressed in the format of YYYYMMDDHHM, such as the elapsed time from a certain time t-1 to t.
- the first knowledge model learning unit 31 may generate a skill state sequence that maximizes the posterior probability as a skill state column.
- the first knowledge model learning unit 31 is described below in a state where specific values of the user j's actual results y j (1) , ..., Y j (Tj) indicated by the learning correctness log are obtained.
- the mode of the model learned by the second knowledge model learning unit 32 is arbitrary, and the second knowledge model learning unit 32 may learn RNN, which is often used in the prediction of time series data, for example.
- RNN a general RNN may be used, or an LSTM (Long short-term memory), a GRU (Gated Recurrent Unit), or the like may be used.
- the learning of the model for performing the knowledge trace is generally performed using the learner's correctness data (learning correctness log) as in the learning performed by the first knowledge model learning unit 31.
- the second knowledge model learning unit 32 of the present embodiment is learning a model for performing knowledge tracing without directly using the correctness data of the learner, the second knowledge model learning unit 32 is learning the model. This can be called a knowledge trace model without correct / incorrect data.
- the output unit 40 outputs the model (knowledge trace model without correct / incorrect data) generated by the second knowledge model learning unit 32.
- the output unit 40 may store the generated model in the storage unit 10, or may store the generated model in another storage medium (not shown) via the communication network.
- the input unit 20, the learning unit 30 (more specifically, the first knowledge model learning unit 31 and the second knowledge model learning unit 32), and the output unit 40 are computer processors (more specifically, a computer processor that operates according to a program (learning program)). For example, it is realized by a CPU (Central Processing Unit) and a GPU (Graphics Processing Unit).
- CPU Central Processing Unit
- GPU Graphics Processing Unit
- the program is stored in the storage unit 10, the processor reads the program, and according to the program, the input unit 20 and the learning unit 30 (more specifically, the first knowledge model learning unit 31 and the second knowledge model learning unit). 32) and may operate as the output unit 40. Further, even if the functions of the input unit 20, the learning unit 30 (more specifically, the first knowledge model learning unit 31 and the second knowledge model learning unit 32) and the output unit 40 are provided in the SaaS (Software as a Service) format. good.
- SaaS Software as a Service
- the input unit 20, the learning unit 30 (more specifically, the first knowledge model learning unit 31 and the second knowledge model learning unit 32), and the output unit 40 are each realized by dedicated hardware. You may. Further, a part or all of each component of each device may be realized by a general-purpose or dedicated circuit (circuitry), a processor, or a combination thereof. These may be composed of a single chip or may be composed of a plurality of chips connected via a bus. A part or all of each component of each device may be realized by the combination of the circuit or the like and the program described above.
- each component of the input unit 20, the learning unit 30 (more specifically, the first knowledge model learning unit 31 and the second knowledge model learning unit 32) and the output unit 40 is a plurality of information processing devices.
- a plurality of information processing devices and circuits may be centrally arranged or distributed.
- the information processing device, the circuit, and the like may be realized as a form in which each is connected via a communication network, such as a client-server system and a cloud computing system.
- FIG. 4 is a flowchart showing an operation example of the learning device 100 of the present embodiment.
- the learning unit 30 (more specifically, the first knowledge model learning unit 31) generates a skill state sequence by machine learning using the learning results (step S11). Then, the learning unit 30 (more specifically, the second knowledge model learning unit 32) learns a model in which the problem feature, the user feature, and the time information are used as explanatory variables, and the state of the learner's skill is used as the objective variable. (Step S12).
- the first knowledge model learning unit 31 generates a skill state sequence by machine learning using the learning results
- the second knowledge model learning unit 32 has problem features, user features, and so on. Then, a model is learned in which the time information is used as an explanatory variable and the learner's skill state is used as an objective variable. Therefore, it is possible to learn a model that predicts changes in the learner's long-term skills.
- the knowledge tracing model is learned based on the learner's time-series learning correctness log. That is, the model described in Non-Patent Document 2 is not a model suitable for long-term prediction because the correct / incorrect result of solving the problem is required as learning data.
- the second knowledge model learning unit 32 learns a model in which the problem feature, the user feature, and the time information are used as explanatory variables, and the learner's skill state is used as the objective variable. Therefore, it becomes possible to make long-term predictions of learners.
- Embodiment 2 Next, a second embodiment of the present invention will be described.
- the learning plan in the present embodiment is information indicating which problem the learner solves when and in what order, and is information in which the problems to be solved by the learner are arranged in chronological order.
- a method of visualizing how the state of one's skill changes when one problem is solved will be described.
- the method of estimating the change in the skill state and visualizing the estimation result will be appropriately described using the model learned in the first embodiment.
- the method of estimating the change in the state of the skill is not limited to the method using the model learned in the first embodiment.
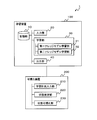
- FIG. 5 is a block diagram showing a configuration example of an embodiment of the visualization system according to the present invention.
- the visualization system 1 of the present embodiment includes a learning device 100 and a visualization device 200. Since the content of the learning device 100 of the present embodiment is the same as that of the learning device 100 of the first embodiment, detailed description thereof will be omitted.
- the storage unit 10 included in the learning device 100 of the first embodiment may be provided in a device different from the learning device 100.
- the visualization device 200 acquires a model learned by the learning device 100 (that is, a knowledge trace model without correct / incorrect data).
- a model learned by the learning device 100 that is, a knowledge trace model without correct / incorrect data.
- the information used for processing by the visualization device 200 for example, the knowledge trace model without correct / incorrect data
- a storage device for example, a storage unit 10
- the visualization device 200 does not have to be connected to the learning device 100.
- the visualization device 200 includes a learning plan input unit 210, a state estimation unit 220, and a state visualization unit 230.
- the learning plan input unit 210 accepts the input of the learning plan.
- the learning plan input unit 210 may display a learning plan input screen on a display device (not shown) and interactively accept input of the learning plan from the learner.
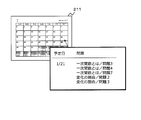
- FIG. 6 is an explanatory diagram showing an example of a screen for inputting a learning plan.
- the learning plan input unit 210 displays a calendar-style input screen 211 as illustrated in FIG. 6, and is a learning plan input by the learner via an appropriate input interface (for example, a touch panel, a pointing device, a keyboard, etc.). May be accepted.
- an appropriate input interface for example, a touch panel, a pointing device, a keyboard, etc.
- the display device may be provided in the visualization device 200, or may be realized by a device different from the visualization device 200 connected via a communication line.
- the learning plan input unit 210 may accept input of the learning plan described in a file or the like.
- the state estimation unit 220 estimates changes in the skill state based on the learning plan. Specifically, the state estimation unit 220 estimates the change in the state of the learner's skill when each problem set in the learning plan is solved in time series.
- the proficiency level of each skill that is estimated to be improved when the problem is solved is predetermined, and the state estimation unit 220 adds the proficiency level corresponding to the solved problem according to the learning plan (for example, addition). , Multiply, etc.) You may estimate changes in the state of the skill. Further, the state estimation unit 220 may reduce the skill proficiency level according to a certain function (forgetting curve) with the passage of time.
- the state estimation unit 220 estimates the change in the skill state using the model learned in the first embodiment (knowledge trace model without correct / incorrect data). You may. That is, the state estimation unit 220 uses problem features representing the characteristics of the problem used by the learner for learning, user characteristics representing the characteristics of the learner, and time information representing the time when the learner solved the problem as explanatory variables. , A change in the skill state may be estimated using a prediction model with the learner's skill state as the objective variable.
- the prediction model has a skill state sequence representing a time-series change in the state of the learner's skill, which is generated by machine learning using the learning results of the learner, and a skill state sequence.
- This is a model learned using data including feature quantities based on a problem feature vector representing the features of the problem used by the learner for learning.
- the state visualization unit 230 visualizes the estimated state of the learner's skill.
- FIG. 7 is an explanatory diagram showing an example of visualizing the state of the skill. As illustrated in FIG. 7, a line graph in which the time is set on the horizontal axis and the skill state (proficiency level) is set on the vertical axis, even if the learner's skill state at each time point is visualized in chronological order. good.
- the state visualization unit 230 may visualize the correct answer probability of the learner at a designated time for each problem.
- FIG. 8 is an explanatory diagram showing an example of visualizing the probability of solving a problem.
- the correct answer probability is visualized by the bar graph 311 for each problem summarized for each unit.
- the state visualization unit 230 may estimate the state of the learner's skill at a certain point in time using, for example, a knowledge trace model without correct / incorrect data, and calculate the correct answer probability based on the estimated skill. For example, when the method described in Non-Patent Document 2 is used, the state visualization unit 230 may calculate the correct answer probability of each problem by using the formula 2 shown above and visualize the calculation result. Specifically, the state visualization unit 230 may visualize the average in the distribution of correct answer probabilities calculated using Equation 2 as the correct answer probability in the bar graph 311 and represent the variance as the degree of uncertainty by the line 312.
- the state visualization unit 230 may visualize the state of each skill of the learner at a certain point in time in more detail.
- the state visualization unit 230 may, for example, visualize the learner's skill assumed at a designated time point for each skill required for solving the target problem.
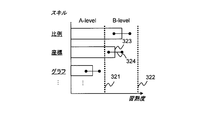
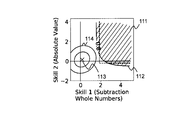
- FIG. 9 is an explanatory diagram showing an example in which the state of each skill is output as a graph.
- the graph illustrated in FIG. 9 is a graph that visualizes the state of the learner's skill for each skill required to solve a certain problem. Further, in the example shown in FIG. 9, it is assumed that, for example, the problem provider has given two types of labels (A-level and B-level) according to the level of the problem.
- a problem a problem with the label "A-level” (hereinafter referred to as "A problem”) is referred to as a standard problem, and a problem with the label "B-level” (hereinafter referred to as “B problem”). ) Is a development problem.
- the threshold value of each level of the skill is shown by a boundary line
- the boundary line 321 is the threshold value of the skill state where it is assumed that all the A problems can be solved
- the boundary line 322 is all the B problem. It is the threshold of the skill state that is supposed to be solved.
- the state of each skill at a certain time point is represented by a bar graph 323, and the uncertainty of the state of the skill is represented by a circled line 324.
- Non-Patent Document 2 When associating skills with a certain problem, it is common to say that it can be solved by satisfying all of those skills.
- Such a model described in Non-Patent Document 2 is called an uncompensated model in multidimensional item response theory. It can be said that the explanation of the reason for prediction using this uncompensated model is natural.
- the model that predicts the correct answer probability is represented by the product of each skill.
- the prediction model can be expressed as follows using the sigmoid function ⁇ .
- the explanation is high because it is interpreted that "the above problem cannot be solved without knowledge of fractions and equations".
- a model representing the probability that the learner can solve the problem i when the learner's state z and the problem i are given can be defined by, for example, the following equation 4 which is a simplification of the above equation 2. That is, the model exemplified in Equation 4 is a model represented by a combination of skills k required by the learner to solve the problem i, and the probability of solving the problem is calculated by the product of each skill.
- the learner's state z represents the proficiency level of each skill k possessed by the learner at a certain point in time.
- bi and k represent the difficulty level of the skill k used in the problem i
- ai and k represent the degree of rise (slope) of the skill k related to the problem i, as in the above formula 2. It is a parameter. That is, Equation 4, b i, the higher the skill level z k skills than difficulty indicating k is, indicating that a problem with a high probability can be solved.
- FIG. 10 is an explanatory diagram showing an example of the likelihood function of the correct answer probability.
- the vertical axis (z-axis) shows the probability of correct answer
- the other axes (x-axis and y-axis) show the proficiency level of the skill required to solve the problem.
- the likelihood function illustrated in FIG. 10 is represented by the equation 4 exemplified above. For example, suppose that two skills are required to solve a problem, as illustrated in FIG. In this case, it is shown that the correct answer probability does not increase even if only one skill is high, but the correct answer probability increases when both skills are high.
- FIG. 11 is an explanatory diagram schematically showing information on the uncompensated model.
- the x mark 113 shown at the lower left of the graph indicates the state of the learner's skill at the present time.
- the ellipse 114 surrounding the x mark 113 indicates a contour line of the probability when the distribution of the learner's skill state follows the Gaussian distribution. In this case, the position of the learner's skill state corresponds to the mean in the Gaussian distribution.
- the state visualization unit 230 calculates the threshold value.
- the threshold value calculated here corresponds to the threshold value indicated by the boundary line 321 exemplified in FIG.
- FIG. 12 is an explanatory diagram showing an example of a process for calculating a threshold value.
- the state visualizing unit 230 calculates the coordinate z k * for each dimension.
- the state visualization unit 230 calculates z k * using, for example, the following equation 5 based on the above equation 4.
- Equation 5 represents the correctness probability
- a i and b i are similar to Equation 4, respectively, showing the slope and difficulty. Since it is assumed that the proficiency level is such that all the A problems can be solved, the most difficult problem i may be selected from the A problems.
- the z k * calculated here corresponds to the coordinates of the plane tangent from the outside to the likelihood function illustrated in FIG. 10, and corresponds to the long chain lines 121 and 122 in FIG.
- ⁇ is the difference between z k * and z ⁇ calculated for each dimension.
- the z ⁇ calculated here corresponds to the coordinates of the surface in contact with the likelihood function illustrated in FIG. 10 from the inside, and corresponds to the coordinates of the point 123 in FIG.
- the state visualization unit 230 repeats the following two processes when calculating the coordinates z ⁇ .
- the status visualization unit 230 based on the z k, calculates the value of each delta k.
- status visualization unit 230 as a second processing, the dimension k for the largest delta k, updating shown in Equation 6 below.
- ⁇ is a parameter and is predetermined.
- the status visualization unit 230 a z kmax updated and z ', the dimension k for the smallest delta k, updating shown in Equation 7 below.
- the state visualization unit 230 repeats these two processes until a predetermined condition (for example, the amount of change is less than the threshold value, a predetermined number of times, etc.) is satisfied.
- the state visualization unit 230 approximates the region to a rectangle by calculating (z ⁇ k ⁇ z k *) / 2 for each k.
- the values calculated here correspond to the coordinates of the dashed lines 124 and 125 in FIG.
- the state visualization unit 230 outputs a bar graph based on the ratio of the learner's skill proficiency to the value indicated by the rectangular approximated coordinates. Specifically, the state visualization unit 230 may output a bar graph based on the ratio of the coordinates 126 indicating the state of the learner's skill to the coordinates indicated by the broken lines 124 and 125. In this way, the state visualization unit 230 associates the proficiency level of the skill (that is, the threshold value) required for solving the target problem with the proficiency level of the skill assumed to be possessed by the learner. Output. The same applies to the threshold value of problem B.
- FIG. 13 is an explanatory diagram showing an example of a process for visualizing the result. For example, if the learner's skill state for skill 1 (integer subtraction) is estimated to be z 1 2 and the variance ⁇ ⁇ of the skill state in the Gaussian distribution is z 1 1 and z 1 3 respectively. do. Then, the coordinates of the broken line 124 is calculated as z 1 4 in FIG. At this time, status visualization unit 230, a proficiency skills 1 learner, ⁇ (a i, 1 ( z 1 2 -b i, 1)) / ⁇ (a i, 1 (z 1 4 -b i , 1 )).
- the state visualization unit 230 may output the variance of the Gaussian distribution as the uncertainty of the proficiency level by using the distribution indicating the state of the learner's skill estimated by the Gaussian distribution. Specifically, the state visualization unit 230 sets the uncertainty range to ⁇ ( ai, 1 (z 1 1 ⁇ bi , 1 )) / ⁇ ( ai, 1 (z 1 4 ⁇ bi, 1)). 1)) and ⁇ (a i, 1 (z 1 3 -b i, 1)) / ⁇ (a i, is calculated by 1 (z 1 4 -b i, 1)). The same applies to skill 2 (absolute value).
- the state visualization unit 230 calculates the relative skill proficiency and uncertainty when the threshold value is 1. That is, the state visualization unit 230 expresses the proficiency level and the uncertainty level of the current learner's skill with respect to the threshold value as relative values in association with the skill name. Therefore, the excess or deficiency of the learner's skill can be presented based on the skill name that the learner can understand. Further, the state visualization unit 230 can improve the learner's sense of conviction by expressing the uncertainty of each skill together.
- the state visualization unit 230 has a proficiency level of the learner's skill assumed at a designated time point and a problem included in the target group (for example, a labeled group) (for example, problem A). , B problem) is visualized in association with the threshold value indicating the proficiency level of the skill required to solve. Therefore, since the group specified by the problem provider is associated with the estimated difficulty level, it becomes easy to grasp the situation of the learner's skill.
- the problem in the group may be one or multiple.
- the state visualization unit 230 may output a candidate problem that requires the specified skill as a "recommended problem". Specifically, the state visualization unit 230 identifies a candidate for a problem that requires a specified skill from a table that associates the problem as illustrated in FIG. 3 with the skill required to solve the problem. You may.
- FIG. 14 is an explanatory diagram showing an output example of the recommended problem.
- status visualization unit 230 for skills "Tsubun” problems which require that skill candidates: the (Recommend problem Q 13, Q 18, Q 31 , Q 33), its It is shown that the skills are ordered according to the required degree (that is, proficiency level, difficulty level) and output in association with the expected learner's skill.
- the state visualization unit 230 may output the question corresponding to the number.
- the state visualization unit 230 may visualize changes in the state of the skill, including the degree of uncertainty.
- FIG. 15 is an explanatory diagram showing another example of visualizing the change in the state of the skill.
- the state visualization unit 230 is a line graph in which the time is set on the horizontal axis and the skill proficiency level is set on the vertical axis. It may be visualized in chronological order. At that time, the state visualization unit 230 may also visualize the boundary line 332 of the labeled problem as shown above.
- the state visualization unit 230 may visualize changes in the state of a plurality of skills.
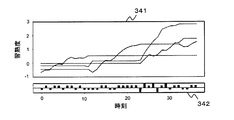
- FIG. 16 is an explanatory diagram showing still another example of visualizing the change in the state of the skill.
- the line graph 341 shows the transition of the states of the plurality of skills.
- the state visualization unit 230 shows the correctness of the problem solved at each time point in a bar graph 342 (for example, upward if the answer is correct, so that the transition of the skill can be grasped in relation to the learning performance. If the answer is incorrect, it may be visualized downward).
- the learning plan input unit 210, the state estimation unit 220, and the state visualization unit 230 are realized by a computer processor that operates according to a program (visualization program).
- the program is stored in a storage unit (not shown) included in the visualization device 200, and the roseser reads the program and operates as a learning plan input unit 210, a state estimation unit 220, and a state visualization unit 230 according to the program. You may.
- the functions of the learning plan input unit 210, the state estimation unit 220, and the state visualization unit 230 may be provided in the SaaS format.
- the learning plan input unit 210, the state estimation unit 220, and the state visualization unit 230 may each be realized by dedicated hardware. Further, a part or all of each component of each device may be realized by a general-purpose or dedicated circuit (circuitry), a processor, or a combination thereof. These may be composed of a single chip or may be composed of a plurality of chips connected via a bus. A part or all of each component of each device may be realized by the combination of the circuit or the like and the program described above.
- each component of the learning plan input unit 210, the state estimation unit 220, and the state visualization unit 230 is realized by a plurality of information processing devices, circuits, or the like, a plurality of information processing devices. , Circuits, etc. may be centrally arranged or distributed.
- the information processing device, the circuit, and the like may be realized as a form in which each is connected via a communication network, such as a client-server system and a cloud computing system.
- FIG. 17 is a flowchart showing an operation example of the visualization device 200 of the present embodiment.
- the learning plan input unit 210 accepts the input of the learning plan (step S21).
- the state estimation unit 220 estimates the state of the learner's skill at each future time point when each problem set in the learning plan is solved in time series (step S22).
- the state visualization unit 230 visualizes the state of the learner's skill at each estimated time point (step S23).
- the visualization mode is, for example, the contents shown in FIGS. 7 to 9 and 13 to 16.
- the learning plan input unit 210 receives the input of the learning plan, and the state estimation unit 220 solves each problem set in the learning plan in chronological order at each future time point. Estimate the state of the learner's skill in. Then, the state visualization unit 230 visualizes the state of the learner's skill at each estimated time point. Therefore, it is possible to visualize changes in the learner's long-term skills.
- FIG. 18 is a block diagram showing an outline of the learning device according to the present invention.
- the learning device 80 for example, the learning device 100
- the first learning means 81 for example, the first knowledge model learning unit 31
- the problem features representing the characteristics of the problem used by the learner for learning
- the user characteristics representing the characteristics of the learner
- the time for solving the problem are described.
- a second learning means 82 for example, a second knowledge model learning unit 32 for learning a model in which the time information to be represented is used as an explanatory variable and the state of the learner's skill represented by the skill state column is used as an objective variable.
- the first learning means 81 may generate a state in which the posterior probability is maximized given the learning achievement as a skill state column.
- the first learning means 81 may generate a vector of time-series prediction probabilities as a skill state sequence.
- the first learning means 81 may perform machine learning by using the learning achievement in which the problem and the correctness of the problem are associated with the user characteristic representing the learner's characteristic. By performing such learning, changes in skills of users with similar user characteristics can be predicted as well.
- the second learning means 82 may learn a recurrent neural network (in addition, LSTM, GRU, etc.) as a model.
- FIG. 19 is a schematic block diagram showing a configuration of a computer according to at least one embodiment.
- the computer 1000 includes a processor 1001, a main storage device 1002, an auxiliary storage device 1003, and an interface 1004.
- the learning device 80 described above is mounted on the computer 1000.
- the operation of each of the above-mentioned processing units is stored in the auxiliary storage device 1003 in the form of a program (learning program).
- the processor 1001 reads a program from the auxiliary storage device 1003, expands it to the main storage device 1002, and executes the above processing according to the program.
- the auxiliary storage device 1003 is an example of a non-temporary tangible medium.
- non-temporary tangible media include magnetic disks, magneto-optical disks, CD-ROMs (Compact Disc Read-only memory), DVD-ROMs (Read-only memory), which are connected via interface 1004. Examples include semiconductor memory.
- the program may be for realizing a part of the above-mentioned functions. Further, the program may be a so-called difference file (difference program) that realizes the above-mentioned function in combination with another program already stored in the auxiliary storage device 1003.
- difference file difference program
- the first learning means to generate a skill state sequence representing the time-series change of the learner's skill state by machine learning using the learning results by the learner, and the problem used by the learner for learning.
- a model in which the problem feature representing the feature, the user feature representing the learner's feature, and the time information representing the time for solving the problem are used as explanatory variables, and the state of the learner's skill represented by the skill state column is used as the objective variable.
- a learning device characterized by being equipped with a second learning means for learning.
- the first learning means is the learning device according to the appendix 1 that generates a state in which the posterior probability is maximized given a learning achievement as a skill state sequence.
- the first learning means is the learning device according to the appendix 1 that generates a vector of time-series prediction probabilities as a skill state sequence.
- the first learning means performs machine learning by using the learning achievement in which the problem and the correctness of the problem are associated with the user characteristic representing the learner's characteristic.
- the learning device according to any one of 3.
- the second learning means is the learning device according to any one of Supplementary note 1 to Supplementary note 4, which learns a recurrent neural network as a model.
- the computer generates a skill state sequence representing the time-series change of the learner's skill state by machine learning using the learning results of the learner, and the computer is used by the learner for learning.
- the problem characteristics representing the characteristics of the problem, the user characteristics representing the characteristics of the learner, and the time information representing the time for solving the problem are used as explanatory variables, and the state of the learner's skill represented by the skill state column is used as the objective variable.
- a learning method characterized by learning a model to do.
- Appendix 7 The learning method according to Appendix 6 in which a computer generates a state in which the posterior probability is maximized given a learning achievement as a skill state column.
- Appendix 8 The learning method according to Appendix 6, wherein the computer generates a vector of time-series prediction probabilities as a skill state sequence.
- the first learning process that generates a skill state sequence that represents the time-series change of the skill state of the learner by machine learning using the learning results by the learner on the computer, and the learner for learning.
- the purpose is to use the problem characteristics representing the characteristics of the problem used, the user characteristics representing the characteristics of the learner, and the time information representing the time for solving the problem as explanatory variables, and the state of the skill of the learner represented by the skill state column.
- a program storage medium that stores a learning program for executing a second learning process that learns a model as a variable.
- Appendix 10 The program storage medium according to Appendix 9 for storing a learning program for generating a state in which the posterior probability is maximized in the first learning process in the first learning process as a skill state sequence. ..
- Appendix 11 The program storage medium according to Appendix 9 for storing a learning program for causing a computer to generate a vector of time-series prediction probabilities as a skill state sequence in the first learning process.
- the first learning process that generates a skill state sequence that represents the time-series change of the skill state of the learner by machine learning using the learning results by the learner on the computer, and the learner for learning.
- the purpose is to use the problem characteristics representing the characteristics of the problem used, the user characteristics representing the characteristics of the learner, and the time information representing the time for solving the problem as explanatory variables, and the state of the skill of the learner represented by the skill state column.
- a learning program for executing a second learning process that learns a model as a variable.
- Appendix 13 The learning program according to Appendix 12, which causes a computer to generate a state in which the posterior probability is maximized in the first learning process when the learning results are given, as a skill state sequence.
- Appendix 14 The learning program according to Appendix 12, which causes a computer to generate a vector of time-series prediction probabilities as a skill state sequence in the first learning process.
Landscapes
- Engineering & Computer Science (AREA)
- Theoretical Computer Science (AREA)
- Business, Economics & Management (AREA)
- Physics & Mathematics (AREA)
- Educational Administration (AREA)
- Educational Technology (AREA)
- General Physics & Mathematics (AREA)
- Entrepreneurship & Innovation (AREA)
- Electrically Operated Instructional Devices (AREA)
- Management, Administration, Business Operations System, And Electronic Commerce (AREA)
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US17/927,219 US20230222933A1 (en) | 2020-05-27 | 2020-05-27 | Learning device, learning method, and learning program |
| JP2022527355A JP7355239B2 (ja) | 2020-05-27 | 2020-05-27 | 学習装置、学習方法および学習プログラム |
| PCT/JP2020/020926 WO2021240684A1 (ja) | 2020-05-27 | 2020-05-27 | 学習装置、学習方法および学習プログラム |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2020/020926 WO2021240684A1 (ja) | 2020-05-27 | 2020-05-27 | 学習装置、学習方法および学習プログラム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2021240684A1 true WO2021240684A1 (ja) | 2021-12-02 |
Family
ID=78723100
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2020/020926 Ceased WO2021240684A1 (ja) | 2020-05-27 | 2020-05-27 | 学習装置、学習方法および学習プログラム |
Country Status (3)
| Country | Link |
|---|---|
| US (1) | US20230222933A1 (https=) |
| JP (1) | JP7355239B2 (https=) |
| WO (1) | WO2021240684A1 (https=) |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2023155301A1 (zh) * | 2022-02-16 | 2023-08-24 | 平安科技(深圳)有限公司 | 基于改进irt结构的答题序列预测方法、控制器及存储介质 |
| KR20230150106A (ko) * | 2022-04-21 | 2023-10-30 | 비트루브 주식회사 | 학습 문제에 대한 정오 예측을 제공하기 위한 방법, 시스템 및 비일시성의 컴퓨터 판독 가능 기록 매체 |
| JP2025111743A (ja) * | 2022-08-22 | 2025-07-30 | All Different株式会社 | 情報処理装置、情報処理方法及びプログラム |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20250058599A (ko) * | 2023-10-23 | 2025-04-30 | 마타에듀 주식회사 | 사용자에게 제공되는 치료 문제를 결정하기 위한 방법 및 시스템 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2018168220A1 (ja) * | 2017-03-14 | 2018-09-20 | 日本電気株式会社 | 学習材推薦方法、学習材推薦装置および学習材推薦プログラム |
| US20190066243A1 (en) * | 2017-08-31 | 2019-02-28 | East Carolina University | Apparatus for Improving Applicant Selection Based On Performance Indices |
-
2020
- 2020-05-27 US US17/927,219 patent/US20230222933A1/en not_active Abandoned
- 2020-05-27 WO PCT/JP2020/020926 patent/WO2021240684A1/ja not_active Ceased
- 2020-05-27 JP JP2022527355A patent/JP7355239B2/ja active Active
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2018168220A1 (ja) * | 2017-03-14 | 2018-09-20 | 日本電気株式会社 | 学習材推薦方法、学習材推薦装置および学習材推薦プログラム |
| US20190066243A1 (en) * | 2017-08-31 | 2019-02-28 | East Carolina University | Apparatus for Improving Applicant Selection Based On Performance Indices |
Non-Patent Citations (1)
| Title |
|---|
| NIIYA, ICHIRO ET AL.: "Comment Mining to Estimate Junior High-school Student Performance toward Improvement of Student Learning", IEICE TECHNICAL REPORT, vol. 117, no. 326, 17 November 2017 (2017-11-17), pages 31 - 36 * |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2023155301A1 (zh) * | 2022-02-16 | 2023-08-24 | 平安科技(深圳)有限公司 | 基于改进irt结构的答题序列预测方法、控制器及存储介质 |
| KR20230150106A (ko) * | 2022-04-21 | 2023-10-30 | 비트루브 주식회사 | 학습 문제에 대한 정오 예측을 제공하기 위한 방법, 시스템 및 비일시성의 컴퓨터 판독 가능 기록 매체 |
| KR102820635B1 (ko) | 2022-04-21 | 2025-06-13 | 마타에듀 주식회사 | 학습 문제에 대한 정오 예측을 제공하기 위한 방법, 시스템 및 비일시성의 컴퓨터 판독 가능 기록 매체 |
| JP2025111743A (ja) * | 2022-08-22 | 2025-07-30 | All Different株式会社 | 情報処理装置、情報処理方法及びプログラム |
Also Published As
| Publication number | Publication date |
|---|---|
| US20230222933A1 (en) | 2023-07-13 |
| JP7355239B2 (ja) | 2023-10-03 |
| JPWO2021240684A1 (https=) | 2021-12-02 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2021240684A1 (ja) | 学習装置、学習方法および学習プログラム | |
| Islam et al. | Pakes: a reinforcement learning-based personalized adaptability knowledge extraction strategy for adaptive learning systems | |
| JP7355240B2 (ja) | スキル可視化装置、スキル可視化方法およびスキル可視化プログラム | |
| US10373512B2 (en) | Mathematical language processing: automatic grading and feedback for open response mathematical questions | |
| US20260087377A1 (en) | Knowledge tracing device, method, and program | |
| WO2020235631A1 (ja) | モデル生成装置、システム、パラメータ算出装置、モデル生成方法、パラメータ算出方法および記録媒体 | |
| Orlando et al. | Toward embedding robotics in learning environments with support to teachers: The IDEE experience | |
| Dutchak et al. | Methods and Software Tools for Automated Synthesis of Adaptive Learning Trajectory in Intelligent Online Learning Management Systems | |
| Yu et al. | Geoexplainer: Interpreting graph convolutional networks with geometric masking | |
| Dai et al. | An improved deep model for knowledge tracing and question-difficulty discovery | |
| Frenoy et al. | Adaptive training environment without prior knowledge: Modeling feedback selection as a multi-armed bandit problem | |
| Bhatt et al. | Evaluating bayesian knowledge tracing for estimating learner proficiency and guiding learner behavior | |
| JP7063397B2 (ja) | 回答統合装置、回答統合方法および回答統合プログラム | |
| US20230100924A1 (en) | Skill output device, skill output method, and skill output program | |
| Sasmita et al. | Development of machine learning implementation in engineering education: A literature review | |
| JPWO2020144853A1 (ja) | 学習装置、学習方法および学習プログラム | |
| Mdaghri-Alaoui et al. | Exploring learner achievement analysis using K-means, SVM, and EM clustering in a Unity-based virtual reality learning environment | |
| Liu et al. | A Probabilistic Framework for Temporal Cognitive Diagnosis in Online Learning Systems | |
| Singh et al. | Folksonomy based trend analysis on community question answering sites: A perspective on software technologies | |
| Afif et al. | Educational Big Data and Data Mining: A Systematic Literature Review | |
| Zhao | Learning Path Recommendation: A Sequential Decision Process | |
| King | Production implementation of recurrent neural networks in adaptive instructional systems | |
| US20250335780A1 (en) | Machine learning model computational graph visualizer with node aggregation | |
| Fernandez et al. | Artificial Intelligence in Massive Open Online Course: A Systematic Literature Review | |
| Yang | Web-Based English Learning System using CatBoost and Randon Forest Framework |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 20938447 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2022527355 Country of ref document: JP Kind code of ref document: A |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 202217067683 Country of ref document: IN |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 20938447 Country of ref document: EP Kind code of ref document: A1 |