WO2020005038A1 - System and terminal for managing environment of breeding place and method thereof - Google Patents
System and terminal for managing environment of breeding place and method thereof Download PDFInfo
- Publication number
- WO2020005038A1 WO2020005038A1 PCT/KR2019/007935 KR2019007935W WO2020005038A1 WO 2020005038 A1 WO2020005038 A1 WO 2020005038A1 KR 2019007935 W KR2019007935 W KR 2019007935W WO 2020005038 A1 WO2020005038 A1 WO 2020005038A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- data
- environment
- kennel
- environmental
- parameter
- Prior art date
Links
- 238000000034 method Methods 0.000 title claims description 38
- 238000009395 breeding Methods 0.000 title abstract description 7
- 230000001488 breeding effect Effects 0.000 title abstract description 7
- 230000007613 environmental effect Effects 0.000 claims abstract description 118
- 238000004422 calculation algorithm Methods 0.000 claims abstract description 97
- 230000033001 locomotion Effects 0.000 claims abstract description 79
- 238000009826 distribution Methods 0.000 claims abstract description 61
- 238000010801 machine learning Methods 0.000 claims abstract description 26
- 230000006399 behavior Effects 0.000 claims abstract description 15
- 238000007726 management method Methods 0.000 claims description 99
- 238000012549 training Methods 0.000 claims description 48
- 238000004458 analytical method Methods 0.000 claims description 33
- 230000003542 behavioural effect Effects 0.000 claims description 29
- CURLTUGMZLYLDI-UHFFFAOYSA-N Carbon dioxide Chemical compound O=C=O CURLTUGMZLYLDI-UHFFFAOYSA-N 0.000 claims description 16
- 230000000694 effects Effects 0.000 claims description 15
- 239000013598 vector Substances 0.000 claims description 14
- 238000004519 manufacturing process Methods 0.000 claims description 9
- 229910002092 carbon dioxide Inorganic materials 0.000 claims description 8
- 239000001569 carbon dioxide Substances 0.000 claims description 7
- 235000021050 feed intake Nutrition 0.000 claims description 7
- 238000003860 storage Methods 0.000 claims description 6
- 241001465754 Metazoa Species 0.000 abstract description 11
- 238000010191 image analysis Methods 0.000 abstract 1
- 244000144972 livestock Species 0.000 description 60
- 238000004891 communication Methods 0.000 description 53
- 238000003384 imaging method Methods 0.000 description 41
- 238000004378 air conditioning Methods 0.000 description 21
- 238000010586 diagram Methods 0.000 description 14
- 238000001514 detection method Methods 0.000 description 11
- 230000003287 optical effect Effects 0.000 description 11
- 230000002159 abnormal effect Effects 0.000 description 10
- 201000010099 disease Diseases 0.000 description 10
- 208000037265 diseases, disorders, signs and symptoms Diseases 0.000 description 10
- 238000005516 engineering process Methods 0.000 description 10
- 230000008569 process Effects 0.000 description 6
- 230000005540 biological transmission Effects 0.000 description 5
- 238000004364 calculation method Methods 0.000 description 5
- 238000013480 data collection Methods 0.000 description 5
- 241000283690 Bos taurus Species 0.000 description 4
- 241000287828 Gallus gallus Species 0.000 description 4
- 230000009471 action Effects 0.000 description 4
- 235000013330 chicken meat Nutrition 0.000 description 4
- 230000006870 function Effects 0.000 description 4
- 238000011410 subtraction method Methods 0.000 description 4
- 238000012706 support-vector machine Methods 0.000 description 4
- 208000007212 Foot-and-Mouth Disease Diseases 0.000 description 3
- 241000710198 Foot-and-mouth disease virus Species 0.000 description 3
- 238000013528 artificial neural network Methods 0.000 description 3
- 206010064097 avian influenza Diseases 0.000 description 3
- 239000000284 extract Substances 0.000 description 3
- 244000144977 poultry Species 0.000 description 3
- 235000013594 poultry meat Nutrition 0.000 description 3
- XLYOFNOQVPJJNP-UHFFFAOYSA-N water Substances O XLYOFNOQVPJJNP-UHFFFAOYSA-N 0.000 description 3
- 230000005856 abnormality Effects 0.000 description 2
- 230000008901 benefit Effects 0.000 description 2
- 238000013527 convolutional neural network Methods 0.000 description 2
- 238000013135 deep learning Methods 0.000 description 2
- 230000006866 deterioration Effects 0.000 description 2
- 230000014509 gene expression Effects 0.000 description 2
- 230000007774 longterm Effects 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 230000004044 response Effects 0.000 description 2
- 238000011282 treatment Methods 0.000 description 2
- 241000272517 Anseriformes Species 0.000 description 1
- PEDCQBHIVMGVHV-UHFFFAOYSA-N Glycerine Chemical compound OCC(O)CO PEDCQBHIVMGVHV-UHFFFAOYSA-N 0.000 description 1
- 241000282887 Suidae Species 0.000 description 1
- 230000004913 activation Effects 0.000 description 1
- 239000012190 activator Substances 0.000 description 1
- 238000003491 array Methods 0.000 description 1
- 238000003287 bathing Methods 0.000 description 1
- 230000000295 complement effect Effects 0.000 description 1
- 238000012937 correction Methods 0.000 description 1
- 238000003066 decision tree Methods 0.000 description 1
- 238000009313 farming Methods 0.000 description 1
- 238000001914 filtration Methods 0.000 description 1
- 235000013305 food Nutrition 0.000 description 1
- 230000001678 irradiating effect Effects 0.000 description 1
- 238000003064 k means clustering Methods 0.000 description 1
- 238000002372 labelling Methods 0.000 description 1
- 238000007477 logistic regression Methods 0.000 description 1
- 229910044991 metal oxide Inorganic materials 0.000 description 1
- 150000004706 metal oxides Chemical class 0.000 description 1
- 238000012544 monitoring process Methods 0.000 description 1
- 238000005192 partition Methods 0.000 description 1
- 238000009304 pastoral farming Methods 0.000 description 1
- 238000007637 random forest analysis Methods 0.000 description 1
- 230000000306 recurrent effect Effects 0.000 description 1
- 230000009467 reduction Effects 0.000 description 1
- 230000002787 reinforcement Effects 0.000 description 1
- 239000004065 semiconductor Substances 0.000 description 1
- 230000007480 spreading Effects 0.000 description 1
- 238000003892 spreading Methods 0.000 description 1
- 230000003068 static effect Effects 0.000 description 1
- 230000008685 targeting Effects 0.000 description 1
- 230000004584 weight gain Effects 0.000 description 1
- 235000019786 weight gain Nutrition 0.000 description 1
Images












Classifications
-
- A—HUMAN NECESSITIES
- A01—AGRICULTURE; FORESTRY; ANIMAL HUSBANDRY; HUNTING; TRAPPING; FISHING
- A01K—ANIMAL HUSBANDRY; CARE OF BIRDS, FISHES, INSECTS; FISHING; REARING OR BREEDING ANIMALS, NOT OTHERWISE PROVIDED FOR; NEW BREEDS OF ANIMALS
- A01K29/00—Other apparatus for animal husbandry
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q50/00—Systems or methods specially adapted for specific business sectors, e.g. utilities or tourism
- G06Q50/02—Agriculture; Fishing; Mining
Definitions
- Embodiments relate to a kennel environmental management system, a terminal, and a method thereof.
- livestock diseases such as mad cow disease, foot-and-mouth disease, and bird flu are intensively occurring in Korea around the world. Pointing out. However, it is difficult to get out of the factory farming system right away in the present situation of our country where farmland is scarce.
- Embodiments provide a farm environment management system, a terminal, and a method for optimizing a livestock farming environment of a farm to improve a production capacity.
- the problem to be solved in the embodiment is not limited thereto, and also includes a purpose or effect which can be grasped from the solution means or the embodiment described below.
- the kennel environment management terminal detects at least one of the position or movement of the moving object in the kennel from the image data including the information on the object to generate the behavioral propensity data for the moving object And an environment parameter estimator for estimating an optimal environment parameter optimized for growth of the moving object by applying the behavioral propensity data and the environment data of the kennel to an optimal environment estimation algorithm based on a machine learning.
- the behavior propensity data may include at least one of position distribution data and motion data for the motion entity.
- the image analyzer may divide the image data into a plurality of regions, and generate the behavior tendency data by calculating at least one of an activity amount and a distribution amount of the moving object for each of the plurality of regions.
- the image analyzer may classify the image data into a plurality of regions such that the actual areas corresponding to each of the plurality of regions are equal to each other based on at least one of height, direction, and lens distortion information of the imaging apparatus generating the image data. .
- the image analyzer may detect the edge of the object from the image data and generate the position distribution data by calculating a distribution of the object for each of the plurality of regions based on the detected edge of the object and a previously stored comparison database. It may comprise one analysis unit.
- the comparison database may include an animal subject DB trained by applying a training DB constructed from images of pre-photographed animal subjects to a machine learning algorithm.
- the image analyzer may include a second analysis unit that calculates a motion vector of a pixel of the image data and generates the motion data by calculating the activity of the object for each of the plurality of regions based on the motion vector.
- the environment parameter estimator may generate a training data set by combining the behavioral propensity data and the environment data, and learn the optimal environment estimation algorithm using the training data set.
- the environmental data may include at least one of feed amount, feed intake, age, moving object weight, temperature, humidity, carbon dioxide, and outside temperature of the kennel.
- the environmental parameter estimating unit is based on a correlation between at least one of the feed amount, feed intake, age, moving object weight, temperature, humidity, carbon dioxide, and outside temperature of the breeding ground and at least one of the location distribution data and the operation data.
- the training dataset can be generated.
- the optimum environment parameter may include at least one of a target temperature, a target humidity, a target feed amount and a target water supply amount of the kennel.
- the environmental parameter estimating unit calculates data reliability based on the behavioral propensity data and the environmental data and a confidence range corresponding to each of the environmental propensity data, and the behavioral propensity data and the environmental data according to a result of comparing the data reliability with a preset threshold. It can generate an alarm signal for.
- the environment parameter estimator may store a result of the user's determination of the alarm signal, and calculate the data reliability using the stored user's decision result when the behavior tendency data and the environment data corresponding to the alarm signal are input. Can be.
- the environment parameter estimator may calculate a final environment parameter based on at least one of a recommended environment parameter and the optimum environment parameter based on the environment data.
- the environment parameter estimator determines whether the environment of the kennel deteriorates when the recommended environment parameter is applied based on the recommended environment parameter and the environment data, and determines that the optimal environment parameter is the final environment parameter when it is determined that the environment of the kennel deteriorates. If it is determined that the environment of the kennel improves, the final environmental parameter may be calculated by combining the optimal environment parameter with the recommended parameter.
- the recommendation environment parameter may be generated by a learning server including a machine learning based recommendation environment estimation algorithm.
- the learning server generates a second training dataset by combining the environment data and the production amount of the moving object in the kennel, and the environment parameter estimating unit learns the recommended environment estimation algorithm using the second training dataset. You can.
- the learning server generates a second training dataset by combining environmental data for other breeding grounds other than the breeding ground and a moving object production amount, and the environment parameter estimating unit uses the second training dataset to generate the recommended environment. Train the estimation algorithm.
- the learning server may learn the recommended environment estimation algorithm according to at least one of a date, a region, and a place.
- the kennel environment management system is disposed at a preset position in a kennel, an imaging apparatus for generating an image data including information on an object by photographing the foreground in the kennel, and arranged at a preset position in the kennel.
- a sensing device for measuring environment in the kennel and generating environmental data, and detecting position and movement of the movement entity in the kennel from the image data to generate behavior propensity data for the movement entity, and the behavior propensity data
- a kennel environment management terminal for applying the environment data to a machine learning-based optimal environment estimation algorithm to estimate an optimal environment parameter optimized for growth of the moving object.
- the air conditioning apparatus may further include an air conditioning apparatus configured to receive the optimum environmental parameters from the kennel environment management terminal and to adjust at least one of temperature and humidity in the kennel based on the optimum environment parameters.
- the sensing device may be disposed at a position higher than a predetermined height from the bottom surface of the kennel.
- the kennel environment management terminal detects at least one of the position or the movement of the moving object in the kennel from the image data including the information on the individual to the behavior propensity data for the moving object Generating, and estimating, by the kennel environment management terminal, the behavioral propensity data and the environment data of the kennel to an optimal environment estimation algorithm based on a machine learning to estimate an optimal environment parameter optimized for growth of the moving object.
- the image pickup apparatus photographs the foreground in the kennel to generate the image data including the information on the object
- the sensing device to measure the environment in the kennel to generate environmental data
- the kennel environment management terminal detects at least one of the position or movement of the moving object in the kennel from the image data to generate behavioral propensity data for the moving object
- the kennel environment management terminal and the behavioral propensity of the individual Estimating an optimal environment parameter optimized for growth of the moving object by applying environmental data of a kennel to a machine learning based optimal environment estimation algorithm
- an air conditioning apparatus receives the optimum environment parameter from the kennel environment management terminal, Based on the optimum environmental parameters Adjusting at least one of temperature and humidity in the kennel.
- the method may further include calculating a final environmental parameter based on one.
- Communication terminal is a communication processor for communicating with the air conditioning apparatus; And receiving a captured image, outputting an image in which the pixel region is masked to instruct the position of the object in the captured image and whether the object is in motion, and outputting at least one of the masked image and the current temperature and the current humidity. And a controller configured to generate a control signal for adjusting at least one of a target temperature and a target humidity of the air conditioner, and transmit the control signal to the air conditioner.
- FIG. 1A is a conceptual diagram of a kennel environmental management system according to an embodiment of the present invention.
- FIG. 1B is a conceptual diagram of a kennel environmental management system according to another embodiment of the present invention.
- FIG. 2 is a configuration diagram of an imaging device according to an embodiment of the present invention.
- FIG. 3 is a view for explaining an arrangement of an imaging device according to an embodiment of the present invention.
- FIG. 4 is a view for explaining the arrangement of the sensing device according to an embodiment of the present invention.
- FIG. 5 is a block diagram of a kennel environment management terminal according to an embodiment of the present invention.
- 6A is a flowchart illustrating a method for managing a kennel environment of a kennel environment management terminal according to an exemplary embodiment of the present invention.
- 6B is a flowchart illustrating a kennel environment management method of the kennel environment management terminal according to another embodiment of the present invention.
- FIG. 7A is a flowchart illustrating a kennel environment management method of a kennel environment management system according to an exemplary embodiment of the present invention.
- FIG. 7B is a flowchart illustrating a kennel environment management method of the kennel environment management system according to another embodiment of the present invention.
- FIG. 8 is a diagram for explaining a machine learning based distribution amount prediction algorithm according to an embodiment of the present invention.
- 9A is a conceptual diagram illustrating a data flow according to calculation of an optimal environment parameter according to an embodiment of the present invention.
- 9B is a conceptual diagram illustrating a data flow according to calculation of an optimal environment parameter according to an embodiment of the present invention.
- ordinal numbers such as second and first
- first and second components may be used to describe various components, but the components are not limited by the terms. The terms are used only for the purpose of distinguishing one component from another.
- second component may be referred to as the first component, and similarly, the first component may also be referred to as the second component.
- FIG. 1A is a conceptual diagram of a kennel environmental management system according to an embodiment of the present invention.
- the kennel environment management system may include an imaging device 100, a sensing device 200, a kennel environment management terminal 300, and an air conditioning device 400.
- the kennel means a livestock farm.
- the livestock may be not only poultry such as chickens and ducks, but also various kinds of animals bred in groups such as cattle and pigs.
- the imaging apparatus 100 may photograph an environment in a kennel, and transmit image data photographed by an individual to the kennel environment management terminal 300. To this end, the imaging apparatus 100 may communicate with the kennel environment management terminal 300 by wire or wirelessly.
- a plurality of imaging devices 100 may be disposed in the kennel.
- the imaging apparatus 100 may transmit the image data photographed by the image sensor to the kennel environment management terminal 300.
- a separate data collection device may be disposed in the kennel to collect image data from the plurality of imaging devices 100 and transmit the image data to the kennel environment management terminal 300.
- the image data of the imaging apparatus 100 may have high quality and high capacity. Therefore, a large bandwidth may be required to transmit the image data photographed by the plurality of imaging devices 100 to the remote kennel environment management terminal 300 in real time, and thus the transmission speed may be reduced.
- the imaging apparatus 100 performs the first analysis for analyzing the state of the kennel using the image data, and then transfers the processed data to a data collection device (not shown) or to the kennel environment management terminal 300. Can transmit That is, the imaging apparatus 100 may efficiently manage communication resources by selecting only the data necessary for analyzing the state of the kennel and transferring the data to the data collector or the kennel environment management terminal 300. Alternatively, the imaging apparatus 100 may primarily analyze the internal state of the kennel using the image data photographing the kennel and transmit the result to the data collection device or transmit the result to the kennel environment management terminal 300.
- the sensing device 200 may measure environment information in the bathing area, generate environment data including the environment information, and transmit the generated environment data to the kennel environment management terminal 300.
- the sensing device 200 may communicate with the kennel environment management terminal 300 by wire or wirelessly.
- a plurality of sensing devices 200 may be disposed in the kennel.
- the plurality of sensing devices 200 may directly transmit environment data measuring the environment of the kennel to the kennel environment management terminal 300.
- a separate data collection device may be disposed in the kennel, and the data collector may collect environmental data from the plurality of sensing devices 200 and transmit the environmental data to the kennel environment management terminal 300.
- the sensing device 200 may be a device in which sensors for measuring various kinds of environmental information are modularized.
- the sensing device 200 may be a device in which a sensor for measuring environmental information such as a temperature sensor, a humidity sensor, and a gas sensor is modularized.
- the plurality of sensing devices 200 in which a plurality of sensors are modularized may be disposed at various locations in the kennel.
- the plurality of sensing devices 200 may measure different environment information.
- the first sensing device 200 may measure the temperature in the kennel
- the second sensing device 200 may measure the humidity in the kennel.
- the sensing device 200 measuring the same kind of environmental information may be several.
- the first and fifth sensing apparatuses 200 may measure the temperature in the kennel
- the second to fourth sensing apparatuses 200 may measure the humidity in the kennel.
- the kennel environment management terminal 300 uses the image data received from the imaging device 100 and the environment data received from the sensing device 200 to generate an optimal environment parameter optimized for the growth of livestock in the kennel.
- the kennel environment management terminal 300 detects at least one of the position or movement of the livestock in the kennel from the image data including the information on the individual to generate behavioral propensity data for the livestock in the kennel. In addition, the kennel environment management terminal 300 estimates an optimal environmental parameter optimized for livestock growth by applying behavioral propensity data and environmental data to an optimal environment estimation algorithm based on machine learning. In addition, the kennel environment management terminal 300 may calculate the final environment parameter based on at least one of the recommendation environment parameter and the optimal environment parameter based on the kennel.
- the kennel environment management terminal 300 may be implemented as a personal computer (PC), a tablet PC, a portable terminal, or the like, or may be implemented in the form of a server or a cloud.
- the kennel environment management terminal 300 is a central server that receives information from a plurality of kennels, the manager may not have easy access to the kennel environment management terminal 300.
- the kennel environment management terminal 300 may transmit information on the kennel management through a portable terminal of a separate administrator. Details of the kennel environment management terminal 300 will be described in detail with reference to the accompanying drawings.
- the air conditioner 400 is a device for adjusting the temperature of the kennel.
- the air conditioning apparatus 400 may adjust at least one of temperature and humidity in the kennel based on the optimum environment parameter received from the kennel environment management terminal 300. For example, assume that an optimal environmental parameter of "target temperature 20 degrees" has been received. At this time, if the temperature of the kennel is 25 degrees, the air conditioning apparatus 400 may operate the cold heat source so that the room temperature of the kennel reaches 20 degrees. As another example, assume that an optimal environmental parameter of "target humidity 40%" has been received. At this time, if the humidity of the kennel is 70%, the air conditioning apparatus 400 may operate the blower so that the indoor humidity of the kennel reaches 40%.
- the kennel environment management system may further include a communication terminal (not shown).
- the communication terminal may include a communication processor and a controller.
- the communication processor communicates with the air conditioning apparatus 400 and transmits an adjustment signal generated by the controller of the communication terminal to the air conditioning apparatus.
- the communication processor may communicate with the imaging apparatus 100, the sensing apparatus 200, and the kennel environment management terminal 300, and may receive data such as a captured image.
- the controller may receive a captured image and output an image in which the pixel area is masked to instruct the position of the object in the captured image and whether the object moves.
- the controller may output an image in which motion data and position distribution data of the captured image are masked in a pixel area of the captured image.
- the motion data and the position distribution data may be represented by region, block, or pixel.
- the abnormal entity information may be mixed with the abnormal entity data.
- the abnormal entity information may be information obtained from abnormal entity data. For example, the higher the probability that an object exists in a pixel of the original captured image, the higher the value of the corresponding pixel of the masked image.
- it may indicate whether a motion exists in an area or a block corresponding to each divided area or block of the image data, or indicate whether a motion exists in a pixel corresponding to each pixel.
- the controller may generate an adjustment signal for adjusting at least one of a target temperature and a target humidity of the air conditioning apparatus by using the masked image and at least one of the current temperature and the current humidity.
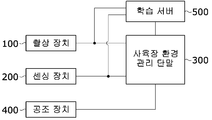
- FIG. 1B is a conceptual diagram of a kennel environmental management system according to another embodiment of the present invention.
- the kennel environment management system includes an imaging device 100, a sensing device 200, a kennel environment management terminal 300, and an air conditioning device 400. It may include a communication terminal (not shown), and may further include a learning server 500. Since the imaging apparatus 100, the sensing apparatus 200, the kennel environment management terminal 300, the air conditioning apparatus 400, and the communication terminal are the same as those described with reference to FIG. 1A, detailed descriptions thereof will be omitted.
- the learning server 500 is an apparatus including a machine learning based recommendation environment estimation algorithm for generating a recommendation environment parameter.
- the learning server 500 may generate a recommendation environment parameter through a recommendation environment estimation algorithm according to at least one of a current date, a region and a place where the kennel is located.
- the learning server 500 may improve the appropriateness of the recommendation environment parameter by learning the recommendation environment estimation algorithm through the second training data.
- the second training data may be generated from environmental data and livestock production information obtained from a plurality of farm environment management terminals 300 connected to the learning server 500.
- the learning server 400 may be implemented as a personal computer (PC), a tablet PC, a portable terminal, or the like, or may be implemented in the form of a cloud. Details of the learning server 500 will be described in detail with reference to the following drawings.
- FIG. 2 is a configuration diagram of an imaging device according to an embodiment of the present invention.
- the imaging apparatus 100 may include a photographing unit 111, a control unit 112, and a first communication unit 113, and an encoding unit 114, a database 115, and a light source unit 116. , May further include a pan tilt portion 117.
- At least one of the control unit 112 and the encoding unit 114 may be implemented by a computer processor or a chip, the database 115 may be mixed with a memory, and the communication unit 113 may be mixed with an antenna or a communication processor. have.
- the photographing unit 111 may photograph an image including a plurality of objects.
- the plurality of individuals may refer to poultry farmed in a kennel.
- the photographing unit 111 may generate image data by using an image including a plurality of objects.
- One first image data may mean a single frame.
- the photographing unit 111 may generate a plurality of image data using images sequentially photographed.
- the photographing unit 111 may be an image sensor photographing a subject by using a complementary metal-oxide semiconductor (COMS) module or a charge coupled device (CCD) module.
- COMS complementary metal-oxide semiconductor
- CCD charge coupled device
- the photographing unit 111 may include a fisheye lens or a wide angle lens having a wide viewing angle. Accordingly, it is possible for one imaging device 100 to photograph the entire space inside the kennel.
- the photographing unit 111 may be a depth camera.
- the photographing unit 111 may be driven by any one of various depth recognition methods, and the depth information may be included in the image photographed by the photographing unit 111.
- the photographing unit 111 may be, for example, a Kinect sensor.
- Kinect sensor is a depth camera of the structured light projection method, it is possible to obtain a three-dimensional information of the scene by projecting a pattern image defined using a projector or a laser, and obtains the image projected pattern through the camera.
- These Kinect sensors include infrared emitters that irradiate patterns using infrared lasers, and infrared cameras that capture infrared images.
- An RGB camera that functions like a typical webcam is disposed between the infrared emitter and the infrared camera.
- the Kinect sensor may further include a pan tilt unit 117 for adjusting the angle of the microphone array and the camera.
- the basic principle of the Kinect sensor is that when the laser pattern irradiated from the infrared emitter is projected and reflected on the object, the distance to the surface of the object is obtained using the position and size of the pattern at the reflection point.
- the photographing unit 111 may generate the image data including depth information for each object by irradiating a laser pattern into the space in the barn and sensing the laser pattern reflected from the object.
- the control unit 112 controls the overall operation of the imaging apparatus 100.
- the controller 112 may control the photographing unit 111 to follow-up the specific region in which the abnormal object is located.
- the tracking photographing target may be set through a user interface unit (not shown) or through a control command of a kennel environment management terminal.
- the control unit 112 controls the photographing unit 111 to track and photograph a specific area in which an abnormal object exists to generate image data so that continuous monitoring can be performed.
- the controller 112 may control the pan tilt unit 117 to perform tracking shooting.
- the pan tilt unit 117 may control a photographing area of the photographing unit 111 by driving two motors, a pan and a tilt.
- the pan tilt unit 117 may adjust the directing direction of the photographing unit 111 to photograph a specific area under the control of the controller 112.
- the pan tilt unit 117 may adjust the directing direction of the photographing unit 111 to track a specific object under the control of the controller 112.
- the first communication unit 113 may perform data communication with at least one of the other imaging apparatus 100 and the kennel environment management terminal.
- the first communication unit 113 may include a wireless LAN (WLAN), a Wi-Fi, a Wi-Fi, a WiMAX, a World Interoperability for Microwave Access (Wimax), and an HSDPA (High).
- Data communication may be performed using telecommunication technologies such as Speed Downlink Packet Access), IEEE 802.16, Long Term Evolution (LTE), and Wireless Mobile Broadband Service (WMBS).
- the first communication unit 113 may include Bluetooth, RadioFrequency Identification (RFID), Infrared Data Association (IrDA), Ultra Wideband (UWB), Zigbee, and Near Field Communication (NFC).
- RFID RadioFrequency Identification
- IrDA Infrared Data Association
- UWB Ultra Wideband
- Zigbee Zigbee
- NFC Near Field Communication
- data communication may be performed using a short-range communication technology such as USB communication, Ethernet, serial communication, and optical / coaxial cable.
- the first communication unit 113 may perform data communication with another abnormality object detecting apparatus using a short range communication technique, and may perform data communication with a kennel environment management terminal using a telecommunication technique, but is not limited thereto.
- Various communication technologies may be used in consideration of various matters of the kennel.
- the first communication unit 113 may transmit the image data photographed by the photographing unit 111 to the kennel environment management terminal.
- the image data transmitted through the first communication unit 113 may be compressed data encoded through the encoding unit 114.
- the encoder 114 encodes the image data photographed by the photographing unit 111 into a digital signal.
- the encoding unit 114 may encode image data according to H.264, H.265, Moving Picture Experts Group (MPEG), and Motion Joint Photographic Experts Group (M-JPEG) standards.
- MPEG Moving Picture Experts Group
- M-JPEG Motion Joint Photographic Experts Group
- the database 115 includes a flash memory type, a hard disk type, a multimedia card micro type, and a card type memory (for example, SD or XD memory).
- Etc. magnetic memory, magnetic disk, optical disk, random access memory (RAM), static random access memory (SRAM), read-only memory (ROM), electrically erasable programmable read-only memory (EPM), PROM It may include at least one storage medium of (Programmable Read-Only Memory).
- the imaging apparatus 100 may operate a web storage that performs a storage function of the database 115 on the Internet, or may operate in connection with the web storage.
- the database 115 may store image data photographed by the photographing unit 111 and may store image data for a predetermined period of time. In addition, the database 115 may store data, a program, and the like necessary for the imaging apparatus 100 to operate. In addition, the database 115 may store various user interfaces (UIs) or graphical user interfaces (GUIs).
- UIs user interfaces
- GUIs graphical user interfaces
- the light source unit 116 may irradiate light in a direction directed under the control of the control unit 112.
- the light source unit 116 may include at least one laser diode (LD) and a light emitting diode (LED).
- the light source unit 116 may emit light of various wavelength bands under the control of the controller 112.
- the light source unit 116 may irradiate light in the infrared wavelength band for night photographing.
- the light source unit 116 may irradiate light in the ultraviolet wavelength band for photochemotherapy of livestock in the kennel.
- FIG. 3 is a view for explaining an arrangement of an imaging device according to an embodiment of the present invention.
- the imaging apparatus 100 may be implemented as one, and may be disposed at a predetermined position in the kennel 10.
- the imaging apparatus 100 is disposed in consideration of the viewing angle of the imaging apparatus 100 to generate image data including information about an object by photographing the foreground in the kennel 10. That is, the imaging apparatus 100 may be disposed at a position where the entire foreground of the kennel 10 may be photographed. For example, it may be disposed above the kennel 10, it may be arranged on the side of the kennel 10.
- the imaging apparatus 100 may be implemented in plural and disposed at various preset locations in the kennel 10.
- the plurality of imaging apparatuses 100 are disposed at various places in the kennel 10 in consideration of the viewing angle of the imaging apparatus 100 to generate image data including information about an object by photographing the foreground in the kennel 10. do. That is, the imaging apparatus 100 may be disposed at a position where the entire foreground of the kennel 10 may be photographed.
- the plurality of imaging devices 100 may be disposed on the upper and side portions of the kennel 10.
- the imaging apparatus 100 may be arranged for each of the kennels 10, and the plurality of imaging apparatuses 100 may be arranged for each of the kennels 10.
- FIG. 4 is a view for explaining the arrangement of the sensing device according to an embodiment of the present invention.
- the sensing device 200 is disposed at a predetermined position in the kennel 10 to measure environment information in the kennel 10 to generate environment data.
- the sensing device 200 may be disposed at a position higher than a predetermined height from the bottom surface of the kennel 10.
- the predetermined height may be determined based on the radius of action of the livestock in the kennel 10. For example, when the livestock is a chicken, the sensing device 200 may be disposed at a position higher than a height at which the chicken may reach the wing.
- the sensing device 200 since the size is small and the durability is not high, breakage or failure may easily occur.
- the sensing device 200 When the sensing device 200 is installed within the action radius of the livestock in the kennel 10, the livestock may damage the sensing device 200 by misunderstanding the sensor as food. Therefore, the sensing device 200 may be disposed at a position higher than a predetermined height from the bottom surface of the kennel 10 to prevent breakage.
- FIG. 5 is a block diagram of a kennel environment management terminal according to an embodiment of the present invention.
- the kennel environment management terminal 300 includes an image analyzer 310 and an environment parameter estimator 320, and may further include a communication unit.
- the image analyzer 310 may include a first analysis unit 311 and a second analysis unit 312.
- the image analyzer 310 detects at least one of the position or movement of the livestock in the kennel from the image data including the information on the individual to generate behavioral propensity data for the livestock in the kennel.
- Behavioral propensity data includes at least one of location distribution data and behavioral data for livestock.
- the position distribution data is generated by detecting the position of the livestock from the image data
- the motion data is generated by detecting the movement of the livestock from the image data.
- the image analyzer 310 divides the image data into a plurality of regions, and calculates at least one of an activity amount and a distribution amount of livestock for each of the plurality of regions. For example, when the image data is divided into 24 regions, the activity and distribution of each of the 24 regions may be generated from one frame.
- the activity of the livestock may mean the amount of motion vector in the divided region
- the distribution of the livestock may mean the density of the livestock detected in the divided region.
- the image analyzer 310 may classify the image data into a plurality of regions such that the actual area of each of the plurality of regions is the same based on at least one of height, direction, and lens distortion information of the imaging apparatus generating the image data. Even if image data is divided into the same area due to distortion of a lens or the like, the actual area of each area may not be the same. Therefore, when calculating the amount of activity and distribution of each area by dividing the image data itself into the same area, the actual area of each area is different, which may cause a problem in data reliability.
- an actual area corresponding to an area A of the plurality of areas is 10 m 2 and an actual area corresponding to an area B is 20 m 2 .
- the image analyzer 310 may divide the image data into a plurality of regions such that the actual areas of the plurality of regions are the same.
- the first analysis unit 311 included in the image analyzer 310 may generate location distribution data by detecting the livestock individual on the image data. That is, the first analysis unit 311 may generate position distribution data by inputting image data to a distribution amount prediction algorithm that detects a livestock individual and calculates a distribution amount of the livestock.
- the distribution prediction algorithm may be a machine learning based algorithm.
- the first analysis unit 311 may detect the edge of the object from the image data and generate position distribution data by calculating a distribution amount of the object for each of the plurality of regions based on the detected edge of the object and a previously stored comparison DB. have.
- the individual may mean a background of a kennel including a feeder as well as a livestock.
- the first analysis unit 311 detects the outline of the object in the image data, compares the detected outline with the appearance of the animal object previously stored in the comparison DB to determine the outline matching the appearance of the animal object previously stored.
- Livestock can be detected with livestock.
- the appearance of the livestock stored in the comparison DB may be the appearance of at least one or more livestock, and the abnormal individual analysis unit detects the individual having the matching outline as the livestock as described above and may also determine the type of the livestock. .
- the first analysis unit 311 extracts a feature point of the entity in the image data, and if the extracted feature point matches the feature point of the animal previously stored in the comparison DB with a proximity greater than or equal to a threshold, the entity in the image data is domesticated. Can be detected as.
- the first analysis unit 311 extracts feature points from images of two objects to be compared, and scale invariant feature transform (SIFT) or speeded up robust (SURF) matching the extracted feature descriptors of the extracted two objects.
- SIFT scale invariant feature transform
- SURF speeded up robust
- the first analysis unit 311 may detect livestock based on the contours of the objects in the image data. More specifically, the first analysis unit 311 generates an edge image by detecting the contours of the objects in the image data, and detects the contour from the foreground image data, which is a background image of the kennel, which is pre-stored in the comparison DB 118, and thus the background edge. An image may be generated and livestock may be detected from a differential image obtained by subtracting a background edge image from an edge image. In this case, the first analyzing unit 311 generates an edge image by detecting an edge of an object appearing in the frame using the gradient information of the image data frame.
- the gradient information is a value generated from a difference value between adjacent pixels among predetermined pixels in a frame, and means a sum of absolute values of differences, and an edge means a boundary between objects using gradient information.
- the first analysis unit 311 may generate a background edge image by detecting an edge of an object corresponding to a background from image data of a foreground in a pre-scanned farm.
- the background edge image may be an image obtained by detecting the contours of the objects of the preset area with the background edge, but comparing the plurality of image data frames of the foreground in the pre-scanned kennel and repeating the predetermined number of times or more.
- the image may be an image of which the contour is detected as a background edge.
- the first analysis unit 311 may detect livestock from the image data using the object detection classifier.
- the object detection classifier is trained by constructing a training DB from livestock images taken by changing the posture or the external environment of the animal.
- the object detection classifier uses a support vector machine (SVM), a neural network, an AdaBoost algorithm, and the like.
- SVM support vector machine
- AdaBoost AdaBoost algorithm
- a comparison DB of livestock is generated through various learning algorithms.
- the first analysis unit 311 detects an edge of the object corresponding to the foreground from the image data of the background in the previously photographed kennel, applies an edge of the foreground object detected from the image data, Livestock can be detected by applying the object detection classifier to the area of the applied image data.
- the second analysis unit 312 included in the image analyzer 310 may generate motion data indicating the movement of the livestock using the image data. That is, the second analysis unit 312 may generate motion data by inputting image data into an activity prediction algorithm that calculates the activity of the individual. In detail, the second analysis unit 312 may generate motion data by calculating a motion vector for a pixel of the image data and calculating an activity amount of the object for each of the plurality of regions based on the motion vector.
- the second analysis unit 312 may detect the movement of the moving object using the Dense Optical Flow method.
- the second analysis unit 312 may calculate a motion vector for all the pixels on the image data to detect a motion for each pixel.
- the Dense Optical Flow method since the motion vector is calculated for all pixels, the detection accuracy is improved, but the amount of computation is relatively increased. Therefore, the Dense Optical Flow method can be applied to a specific area where detection accuracy is very high, such as a kennel where an abnormal situation is suspected or a kennel with a large number of individuals.
- the second analysis unit 312 may detect the movement of the moving object using a sparse optical flow method.
- the second analysis unit 312 may detect a motion by calculating a motion vector only for some of the characteristic pixels that are easy to track, such as edges in the image.
- the sparse optical flow method reduces the amount of computation, but only results for a limited number of pixels. Therefore, the sparse optical flow method may be applied to a kennel having a small number of individuals or to a specific area where the objects do not overlap.
- the second analyzing unit 312 may detect movement of the moving object using block matching.
- the second analysis unit 312 may divide the image evenly or unequally, calculate a motion vector with respect to the divided region, and detect a motion.
- Block Matching reduces the amount of computation because it calculates the motion vector for each partition, but it can have a relatively low detection accuracy because it calculates the results for the motion vector for each region. Accordingly, the block matching method may be applied to a kennel with a small number of individuals or to a specific area where the objects do not overlap.
- the second analysis unit 312 may detect the movement of the moving object by using a continuous frame difference method.
- the second analyzing unit 312 may compare successive image frames for each pixel and calculate a value corresponding to the difference to detect motion. Since the Continuous Frame Difference method detects motion by using the difference between frames, the overall computational amount is reduced, but the detection accuracy of a large object or a duplicate object may be relatively low. In addition, the Continuous Frame Difference method can not distinguish between the background image and the moving object may have a relatively low accuracy. Therefore, the Continuous Frame Difference method may be applied to a kennel with a small number of objects or to a specific area where the objects do not overlap.
- the second analysis unit 312 may detect the movement of the moving object by using a background subtraction method.
- the second analysis unit 312 may detect the motion by comparing successive image frames for each pixel in a state where the background image is initially learned, and calculating a value corresponding to the difference.
- the background subtraction method is to learn the background image in advance so that the background image can be distinguished from the moving object. Therefore, a separate process of filtering the background image is required, thereby increasing the amount of computation but improving the accuracy. Therefore, the background subtraction method can be applied to a specific area where detection accuracy is very high, such as a kennel suspected of an abnormal situation or a kennel with a large number of individuals.
- the background image can be updated continuously.
- the environment parameter estimator 320 includes a machine learning based optimal environment estimation algorithm, and calculates an optimal environment parameter using the optimal environment estimation algorithm.
- the environmental parameter estimator 320 estimates an optimal environmental parameter optimized for livestock growth by applying behavioral propensity data and environment data of a kennel to an optimal environment estimation algorithm based on machine learning.
- the environmental data may include at least one of the amount of feed provided, feed intake, age, livestock weight, temperature, humidity, carbon dioxide amount, outside temperature of the kennel.
- the temperature, humidity, and carbon dioxide amount of the kennel may be received from the sensing device, and the amount of feed provided, the amount of feed intake, and the amount of livestock gain may be input from the user.
- the moon age and the outside temperature can be received from an external server such as the Meteorological Agency server.
- the environment parameter estimator 320 may calculate the final environment parameter based on at least one of the recommended environment parameter and the optimal environment parameter based on the environment data.
- the environmental parameter estimating unit 320 determines whether the environment of the kennel deteriorates and determines whether to consider the recommended environmental parameters when calculating the final environmental parameters. If it is determined that the environment of the kennel deteriorates according to the recommended environmental parameter, the environmental parameter estimator 320 determines the optimum environmental parameter as the final environmental parameter. On the other hand, if it is determined that the environment does not deteriorate according to the recommended environmental parameters, the environmental parameter estimator 320 calculates the final environmental parameters in consideration of the optimal environmental parameters and the recommended environmental parameters.
- the optimum environmental parameter may include at least one of an optimum temperature, an optimum humidity, an optimum feeding amount, and an optimum water supply amount of the kennel.
- the recommended environment parameter includes at least one of the recommended temperature, recommended humidity, recommended feeding amount and recommended water supply amount of the kennel.
- the final environmental parameter includes at least one of the final temperature, final humidity, final feed amount and final feed amount of the kennel.
- the environmental parameter estimator 320 may generate a training data set by combining behavioral propensity data and environmental data, and may learn an optimal environmental estimation algorithm using the training data set.
- the training data set may be generated by combining a training data generation algorithm included in the environment parameter estimator 320 with behavioral propensity data and environmental data.
- the environmental parameter estimator 320 may include training data based on a correlation between at least one of feed supply, feed intake, age, livestock weight, temperature, humidity, carbon dioxide, and external temperature of the kennel and at least one of location distribution data and motion data. You can create a set.
- the environmental parameter estimator 320 may determine the reliability of the behavioral propensity data and the environmental data, and may transmit an alarm signal to the user according to the determined reliability.
- the environmental parameter estimator 320 calculates data reliability based on the behavioral propensity data and the environmental data and the confidence range corresponding to each of the environmental parameter estimator 320, and the data reliability is smaller than the preset threshold.
- Alarm signals can be generated.
- the environment parameter estimator 320 stores the determination result of the user on the alarm signal, and the behavior propensity data corresponding to the alarm signal;
- data reliability may be calculated using the stored user's determination result.
- the environmental parameter estimator 320 may calculate, as data reliability, the standard deviation of the current temperature with respect to the kennel temperature for the previous hour from the current time point, and if the standard deviation is higher than the threshold, Can generate an alarm signal. Then, the user may input whether the current temperature is an error or a correction temperature in response to the alarm signal, and the environmental parameter estimator 320 may store the received information. If a similar situation occurs later, the environmental parameter estimator 320 may determine data reliability according to the stored information.
- the second communication unit 330 may perform data communication with at least one of the imaging apparatus and the air conditioning apparatus.
- the second communication unit 330 may include a wireless LAN (WLAN), a Wi-Fi, a Wi-Fi, a WiMAX, a World Interoperability for Microwave Access (Wimax), and an HSDPA (High).
- Data communication may be performed using telecommunication technologies such as Speed Downlink Packet Access), IEEE 802.16, Long Term Evolution (LTE), and Wireless Mobile Broadband Service (WMBS).
- the second communication unit 330 may include Bluetooth, RadioFrequency Identification (RFID), Infrared Data Association (IrDA), Ultra WideBand (UWB), Zigbee, and Near Field Communication (NFC).
- RFID RadioFrequency Identification
- IrDA Infrared Data Association
- UWB Ultra WideBand
- Zigbee Zigbee
- NFC Near Field Communication
- data communication may be performed using a short-range communication technology such as USB communication, Ethernet, serial communication, and optical / coaxial cable.
- the second communication unit 330 may perform data communication with another abnormality object detecting apparatus using a short range communication technology, and may perform data communication with the kennel environment management terminal 300 using a long distance communication technology.
- the present invention is not limited thereto, and various communication technologies may be used in consideration of various matters of the kennel.
- the second communication unit 330 may transmit the image data photographed by the photographing unit to the kennel environment management terminal 300.
- the image data transmitted through the second communication unit 330 may be compressed data encoded through the encoding unit.
- 6A is a flowchart illustrating a method for managing a kennel environment of a kennel environment management terminal according to an exemplary embodiment of the present invention.
- the image analyzer receives the image data photographing the foreground of the kennel and the environmental data measuring the environment information of the kennel (S610).
- the image analyzer detects at least one of the position or movement of the livestock in the kennel from the image data to generate behavioral propensity data for the livestock in the kennel (S611).
- Behavioral propensity data may include at least one of location distribution data and motion data for livestock.
- the environmental parameter estimator estimates the optimal environmental parameters optimized for the growth of the livestock by applying the behavioral propensity data and the environment data of the kennel to the optimal environment estimation algorithm based on the machine learning (S612).
- the environment parameter estimator transmits the optimum environment parameter to the air conditioning apparatus (S613).
- the environmental parameter estimator generates a training data set by combining behavioral propensity data and environmental data (S614).
- the environment parameter estimator learns an optimal environment estimation algorithm using the training data set (S615).
- 6B is a flowchart illustrating a kennel environment management method of the kennel environment management terminal according to another embodiment of the present invention.
- S620 to S622 of FIG. 6B correspond to S610 to S612 of FIG. 6A, respectively.
- S625 to S627 in FIG. 6B correspond to S613 to S615 in FIG. 6A, respectively.
- the environmental parameter estimator estimates an optimal environmental parameter optimized for livestock growth by applying behavioral propensity data and environment data of the kennel to an optimal environment estimation algorithm based on the machine learning (S622).
- the environment parameter estimator determines whether the environment of the kennel deteriorates when the recommended environment parameter is applied based on the environment data (S623).
- the environmental parameter estimating unit calculates the final environmental parameter based on at least one of the optimal environmental parameter and the recommended environmental parameter according to the determination result of the deterioration of the kennel environment (S624).
- FIG. 7A is a flowchart illustrating a kennel environment management method of a kennel environment management system according to an exemplary embodiment of the present invention.
- the imaging apparatus 100 photographs the foreground of the kennel to generate the image data including the information on the individual in the kennel (S710), and then transmits the image data to the kennel environment management terminal 300 (S711).
- the sensing device 200 measures the environment of the kennel to generate environment data (S712), and transmits the environment data to the kennel environment management terminal 300 (S713).
- the kennel environment management terminal 300 detects at least one of the position or movement of the livestock in the kennel from the image data to generate behavioral propensity data for the livestock in the kennel (S714).
- Behavioral propensity data may include at least one of location distribution data and motion data for livestock.
- the kennel environment management terminal 300 generates a training data set by combining behavioral propensity data and environmental data (S715).
- the kennel environment management terminal 300 learns an optimal environment estimation algorithm using the training data set (S716).
- the kennel environment management terminal 300 estimates an optimal environment parameter optimized for livestock growth by applying behavioral propensity data and environment data of the kennel to an optimal environment estimation algorithm based on machine learning (S717).
- the environmental parameter estimator transmits the optimum environmental parameter to the air conditioning apparatus 400 (S718).
- the air conditioning apparatus 400 controls the environment of the kennel based on the optimum environmental parameters (S719).
- FIG. 7B is a flowchart illustrating a kennel environment management method of the kennel environment management system according to another embodiment of the present invention.
- S720 to S727 of FIG. 7B correspond to S710 to S717 of FIG. 7A, respectively.
- S730 and S731 of FIG. 7B correspond to S718 and S719 of FIG. 7A, respectively.
- the kennel environment management terminal 300 determines whether the kennel environment is deteriorated when the recommended environment parameter is applied based on the environment data (S728).
- the kennel environment management terminal 300 calculates the final environment parameter based on at least one of the optimal environment parameter and the recommended environment parameter according to the determination result of the deterioration of the kennel environment (S729).
- steps S730 and S731 are performed.
- FIG. 8 is a diagram for explaining a machine learning based distribution amount prediction algorithm according to an embodiment of the present invention.
- the distribution prediction algorithm is an example of a deep learning algorithm designed to display density information of a region where an object is located.
- the distribution amount prediction algorithm may be an algorithm for inputting an original image to a convolution network-based learning machine and then outputting a density image represented by a gray scale probability map. According to this, abnormal object information can be easily extracted even in a kennel environment in which objects having a similar shape, such as a chicken house, are accommodated at high density.
- the distribution prediction algorithm may include at least one convolution network (layer).
- the convolutional network may classify the feature points of the image using at least one feature map (W).
- the convolutional network may improve the performance of the distribution prediction algorithm through at least one pooler and / or activator.
- the distribution prediction algorithm further includes a concatenator, and the concatenator may concatenate and rearrange output results of at least one convolutional network to output density (distribution) information of an object by using feature points of the original image. .
- the kennel environment management terminal can learn the distribution prediction algorithm using the original image and the density image, and at least one feature map (W) is trained (tuned) to output the density information of the object.
- W feature map
- the density prediction algorithm is configured such that the density image has a size (Width x Highet) that is the same as or similar to the original image, and the positions of each pixel (or block) correspond to each other, and the pixels of the density image are
- the value of may represent the probability that an object (eg, poultry) may exist in a corresponding pixel of the original image. For example, the higher the probability that an object exists in a pixel of the original image, the higher the value of the pixel of the density image may be.
- 9A is a conceptual diagram illustrating a data flow according to calculation of an optimal environment parameter according to an embodiment of the present invention.
- the n th image data is input to the distribution amount prediction algorithm and the active amount prediction algorithm, respectively, and the n-1 th image data is input to the activity amount prediction algorithm.
- the image data may be RGB data having a W X H size, and the n th image data may be mixed with the n th original data, the n th original image, the n th original image data, and the like.
- the image analyzer 310 of the kennel environment management terminal 300 detects an object from the nth image data and generates position distribution data of the object with respect to the nth image data.
- the position distribution data may be generated for each region, for each block, or for each pixel, and the image analyzer 310 may use a learned distribution prediction algorithm to suggest a region in which the object is located in the image data.
- the distribution amount prediction algorithm may use a real-time object detection method using an algorithm indicating an area where an object exists as described above, or the distribution amount prediction algorithm may use distribution information of an object, that is, an area of an area where an object is located. It is also possible to use a method of representing density information.
- the position distribution data may be a density map.
- the image analyzing unit 310 of the kennel environment management terminal 300 compares the n-1th image data and the nth image data to determine the movement of the object with respect to the nth image data. Detect.
- the n ⁇ 1th image data may be stored in the latch circuit or the buffer circuit.
- the image analyzer 310 for example, the second analysis unit 312 of the farm environment management terminal 300 generates motion data according to the detected movement.
- the motion data may be a motion map.
- the motion data may be generated for each region, block, or pixel, and the image analyzer 310 may use an activity amount prediction algorithm trained to detect motion by using an optical flow.
- the kennel environment management terminal 300 inputs the n-th position distribution data, the n-th operation data and the n-th environment data received from the sensor to the optimum environment estimation algorithm to extract the optimal environment parameters.
- the optimum environmental parameters are transferred to the air conditioning apparatus 400, which operates the air conditioning apparatus 400 using the optimal environmental parameters.
- the kennel environment management terminal 300 may train, that is, update the optimal environment estimation algorithm.
- the optimal environment estimation algorithm may be at least one of a supervised learning based machine learning algorithm, an unsupervised learning based machine learning algorithm, and a reinforcement learning based machine learning algorithm.
- Optimal environmental estimation algorithms include logistic regression, k-nearest neighbor (KNN), support vector machine (SVM), generalized linear models (GLM), and pseudo Decision trees, random forests, gradient boosting machines (GBMs), deep learning, convolutional neural networks (CNNs), recurrent neural networks (RNNs) ), Clustering, Anomaly detection, Dimension reduction, Underlying Probability Density Estimation, Autoencoders, Q-Learning, Deep-Q-Network, DQN), Naive Bayes Classifier (NBC), Hidden Markov Model (HMM), K-Means Clustering, K-Nearest Neighbors, k -NN), ensemble learning (Ens) emble learning).
- KNN k-nearest neighbor
- SVM support vector machine
- GLM generalized linear models
- pseudo Decision trees random forests, gradient boosting machines (GBMs), deep learning, convolutional neural networks (CNNs), recurrent neural networks (RNNs) ), Clustering, Anomaly detection, Dimension
- the kennel environment management terminal 300 may generate a training data set by combining motion data, location data, and environmental data through a training data generation algorithm.
- the training data generation algorithm may generate the training dataset according to the type of the optimal environment estimation algorithm.
- the training data generation algorithm may generate the training data set by labeling the environmental data in at least one of the position distribution data and the motion data. Can be.
- the training data generation algorithm may generate at least one of position distribution data and motion data in the environmental data to generate a training data set.
- the training data set may be [Data (temperature of the nth environmental data); Label (nth motion data)] or [Data (nth motion data, nth position distribution data); Label (temperature of the nth environmental data, humidity of the nth environmental data, CO2 of the nth environmental data).
- the training data generation algorithm may generate a training data set by combining location distribution data, motion data, and environment data.
- the training data set may be in the form of [Data (n th motion data, n th position distribution data, n th environmental data temperature, n th environmental data humidity)].
- the training data generation algorithm may generate a training data set by combining location distribution data, motion data, and environment data.
- the training data set is [state (nth motion data, nth position distribution data, nth environmental data temperature, nth environmental data humidity), action (nth optimal environmental parameter control temperature, nth Control humidity of the optimal environmental parameters), reward (production, feed intake, weight gain)].
- the action the control temperature of the n-th optimal environmental parameter, the control humidity of the n-th optimal environmental parameter
- the control humidity of the n-th optimal environmental parameter may be a value of the optimum environmental parameter, and may be an actual control value of the air conditioning apparatus.
- the kennel environment management terminal 300 may learn an optimal environment estimation algorithm using a training data set.
- the optimal environment estimation algorithm is a neural network circuit composed of an input layer, a hidden layer, and an output layer.
- the n th operation data, the n th position distribution data, and the n th temperature data are input to three nodes of an input layer, respectively.
- the node of each input layer may extract feature values from the n th operation data, the n th position distribution data, and the n th temperature. For example, the sum of the magnitude values of the entire motion vectors of the n th motion data may be extracted as a feature value, and various feature values may be extracted.
- Each feature value is input to each node of the hidden layer, and each node of the hidden layer adds the value multiplied by the corresponding weight (w) to the feature value input in Equation 1 and Equation 1 below and
- the output may be determined by applying to a sigmoid fuction, which is an activation function such as Equation 2.
- w 1 is a weight corresponding to the n th motion data
- x 1 is a feature value of the n th motion data
- w 2 is a weight corresponding to the n th position distribution data
- x 2 is a feature value of the n th position distribution data
- W 3 is a weight corresponding to the n th environmental data
- x 3 is a feature value of the n th environmental data.
- the hidden layers other than the first hidden layer connected to the input layer may be modified by Equation 1 according to the input node.
- the kennel environment management terminal 300 adjusts the weight (w) set in each node according to the error of the value output through the output layer.
- the weight w may be adjusted using backpropagation.
- 9B is a conceptual diagram illustrating a data flow according to calculation of an optimal environment parameter according to another embodiment of the present invention.
- FIG. 9B may include all of the configurations described with reference to FIG. 9A, and may further include contents described below.
- the final environment estimation algorithm generates a final environment parameter based on at least one of the optimal environment parameter and the recommended environment parameter.
- the final environment estimation algorithm determines whether the recommended environment parameter is appropriate in order to determine whether to consider only the optimal environment parameter or the recommended environment parameter and the recommended environment parameter together when calculating the final environment parameter.
- the final environment estimation algorithm compares the environment data for the kennel with the recommended environment parameter to determine whether productivity is deteriorated when the environment is controlled according to the recommended environment parameter. In one embodiment, when the difference value between the value of the environmental data and the value of the recommended environment parameter exceeds the threshold range, the final environment estimation algorithm may determine that the kennel environment is deteriorated when the recommended environment parameter is applied.
- the critical range for temperature is set between -5 and 5 degrees, and the difference between the current temperature in the environmental data and the recommended temperature in the kennel recommended environmental parameter is 10 degrees, then the final environmental estimation algorithm will determine the recommended environmental parameter. It can be judged that the application environment deteriorates when applied.
- the final environment estimation algorithm determines the optimal environment parameter as the final environment parameter without considering the recommended environment parameter.
- the final environment estimation algorithm determines the optimum environment parameter as the final environment parameter without considering the recommended environment parameter.
- the final environment estimation algorithm may calculate an average value of the recommended environment parameter and the optimal environment parameter as the final environment parameter.
- the final environment estimation algorithm may generate an offset value by adding a preset weight to the recommended environment parameter, and calculate or add a final value to the optimum environment parameter by adding or subtracting the offset value. have.
- the recommended environment estimation algorithm included in the learning server 400 may set at least one of a date, a region, and a place as a category, and learn by using the second training data set for each category.
- the recommended environment estimation algorithm may have a category of ⁇ Gangwon-do Cheorwon-gun, April>.
- the second training dataset is the recommended environment in the category ⁇ Gewon, Cheorwon-gun, April>. Used in the estimation algorithm.
- the second training dataset is used to train the machine learning based recommended environment estimation algorithm.
- the recommendation environment estimation algorithm may generate a recommendation environment parameter according to at least one of a current date, a region, and a place where the kennel is located. As an example, when generating recommended environment parameters for a kennel in a coastal area of Gimhae, Gyeongsang-do, October, the recommended environment estimation algorithm may generate recommended environment parameters within a category of ⁇ Gyeongsang-do, Gimhae, coast, autumn>. have.
- the recommended environment estimation algorithm may transmit the recommended environment parameter to the kennel environment management terminal at regular intervals or, if there is a request for transmission, the recommended environment parameter to the kennel environment management terminal. Since the type and learning process of the recommended environment estimation algorithm differ only from the information included in the training data set, the detailed environment description is omitted.
- ' ⁇ part' used in the present embodiment refers to software or a hardware component such as a field-programmable gate array (FPGA) or an ASIC, and ' ⁇ part' performs certain roles.
- ' ⁇ ' is not meant to be limited to software or hardware.
- ' ⁇ Portion' may be configured to be in an addressable storage medium or may be configured to play one or more processors.
- ' ⁇ ' means components such as software components, object-oriented software components, class components, and task components, and processes, functions, properties, procedures, and the like. Subroutines, segments of program code, drivers, firmware, microcode, circuits, data, databases, data structures, tables, arrays, and variables.
- the functionality provided within the components and the 'parts' may be combined into a smaller number of components and the 'parts' or further separated into additional components and the 'parts'.
- the components and ' ⁇ ' may be implemented to play one or more CPUs in the device or secure multimedia card.
Abstract
A terminal for managing an environment of a breeding place according to an embodiment of the present invention comprises: an image analysis unit for detecting at least one of the position and movement of a moving individual animal in a breeding place, from image data including information on an individual animal, and thus generating behavior inclination data including at least one piece of data among position distribution data and movement data on the moving individual animal; and an environment parameter estimation unit for applying the behavior inclination data and environmental data of the breeding place to a machine learning-based optimal environment estimation algorithm, and thus estimating an optimal environment parameter optimized for growth of the moving individual animal.
Description
실시 예는 사육장 환경 관리 시스템, 단말 및 그 방법에 관한 것이다.Embodiments relate to a kennel environmental management system, a terminal, and a method thereof.
최근 광우병, 구제역, 조류 독감 등 축산 농가에서 사육하는 가축을 대상으로 하는 질병이 확산되고 있다. 광우병, 구제역, 조류 독감과 같은 가축 질병은 가축의 치사율 및 전염율이 매우 높은 반면, 그 치료법 발견되지 않아 대부분 살처분을 통해 문제를 해결하고 있다. 이러한 가축 질병들은 사람에게 전염될 가능성이 제기되어 더 큰 문제가 되고 있다. Recently, diseases targeting livestock farms such as mad cow disease, foot and mouth disease, and bird flu have been spreading. Livestock diseases such as mad cow disease, foot-and-mouth disease, and bird flu have very high mortality and transmission rates, but most treatments have been solved by killing because no treatment has been found. These livestock diseases are becoming a bigger problem because of the potential for human transmission.
특히, 광우병, 구제역, 조류 독감과 같은 가축 질병들은 전 세계적으로 우리 나라에 집중적으로 발생하고 있는데, 경제협력개발기구(OECD)는 가축질병의 주요 원인으로 좁은 면적에서 집약적으로 가축을 키우는 공장식 축산을 지목하고 있다. 그러나 농지가 부족한 우리 나라 현황에서 공장식 축산 방식을 당장 벗어나는 것은 어려운 실정이다. In particular, livestock diseases such as mad cow disease, foot-and-mouth disease, and bird flu are intensively occurring in Korea around the world. Pointing out. However, it is difficult to get out of the factory farming system right away in the present situation of our country where farmland is scarce.
따라서, 가축을 사육하는 사육장의 환경을 개선하여 가축 질병의 발병을 감소시킴과 동시에 가축의 생산량을 향상시킬 수 있는 시스템의 연구가 필요하다.Therefore, there is a need for a system that can improve the production of livestock diseases while reducing the incidence of livestock diseases by improving the environment of a livestock farm.
실시 예는 사육장의 가축 사육 환경을 최적화하여 생산 능력을 향상시키기 위한 사육장 환경 관리 시스템, 단말 및 그 방법을 제공하기 위한 것이다. Embodiments provide a farm environment management system, a terminal, and a method for optimizing a livestock farming environment of a farm to improve a production capacity.
실시 예에서 해결하고자 하는 과제는 이에 한정되는 것은 아니며, 아래에서 설명하는 과제의 해결수단이나 실시 형태로부터 파악될 수 있는 목적이나 효과도 포함된 The problem to be solved in the embodiment is not limited thereto, and also includes a purpose or effect which can be grasped from the solution means or the embodiment described below.
본 발명의 실시예에 따른 사육장 환경 관리 단말은 개체에 대한 정보가 포함된 영상 데이터로부터 사육장 내 동작 개체의 위치 또는 움직임 중 적어도 하나를 검출하여 상기 동작 개체에 대한 행동 성향 데이터를 생성하는 영상 분석부, 그리고 상기 행동 성향 데이터와 상기 사육장의 환경 데이터를 기계학습 기반의 최적 환경 추정 알고리즘에 적용하여 상기 동작 개체의 성장에 최적화된 최적 환경 파라미터를 추정하는 환경 파라미터 추정부를 포함한다. The kennel environment management terminal according to an embodiment of the present invention detects at least one of the position or movement of the moving object in the kennel from the image data including the information on the object to generate the behavioral propensity data for the moving object And an environment parameter estimator for estimating an optimal environment parameter optimized for growth of the moving object by applying the behavioral propensity data and the environment data of the kennel to an optimal environment estimation algorithm based on a machine learning.
상기 행동 성향 데이터는, 상기 동작 개체에 대한 위치 분포 데이터 및 동작 데이터 중 적어도 하나를 포함할 수 있다. The behavior propensity data may include at least one of position distribution data and motion data for the motion entity.
상기 영상 분석부는, 상기 영상 데이터를 복수 영역으로 구분하고, 상기 복수 영역별로 상기 동작 개체의 활동량 및 분포량 중 적어도 하나를 계산하여 상기 행동 성향 데이터를 생성할 수 있다. The image analyzer may divide the image data into a plurality of regions, and generate the behavior tendency data by calculating at least one of an activity amount and a distribution amount of the moving object for each of the plurality of regions.
상기 영상 분석부는, 상기 영상 데이터를 생성하는 촬상 장치의 높이, 방향, 렌즈 왜곡 정보 중 적어도 하나에 기초하여 상기 복수 영역 각각에 대응하는 실제 면적이 서로 동일하도록 상기 영상 데이터를 복수 영역으로 구분할 수 있다. The image analyzer may classify the image data into a plurality of regions such that the actual areas corresponding to each of the plurality of regions are equal to each other based on at least one of height, direction, and lens distortion information of the imaging apparatus generating the image data. .
상기 영상 분석부는, 상기 영상 데이터로부터 상기 개체의 에지를 검출하고, 검출된 상기 개체의 에지와 기 저장된 비교 데이터 베이스에 기초하여 상기 복수 영역별 개체의 분포도를 계산하여 상기 위치 분포 데이터를 생성하는 제1 분석 유닛을 포함할 수 있다. The image analyzer may detect the edge of the object from the image data and generate the position distribution data by calculating a distribution of the object for each of the plurality of regions based on the detected edge of the object and a previously stored comparison database. It may comprise one analysis unit.
상기 비교 데이터 베이스는, 기 촬영한 동물 개체의 영상들로부터 구축된 훈련 DB를 기계학습 알고리즘에 적용하여 학습된 동물 개체 DB를 포함할 수 있다. The comparison database may include an animal subject DB trained by applying a training DB constructed from images of pre-photographed animal subjects to a machine learning algorithm.
상기 영상 분석부는, 상기 영상 데이터의 픽셀에 대한 모션 벡터를 연산하고, 상기 모션 벡터에 기초하여 상기 복수 영역별 개체의 활동성을 계산하여 상기 동작 데이터를 생성하는 제2 분석 유닛을 포함할 수 있다. The image analyzer may include a second analysis unit that calculates a motion vector of a pixel of the image data and generates the motion data by calculating the activity of the object for each of the plurality of regions based on the motion vector.
상기 환경 파라미터 추정부는, 상기 행동 성향 데이터와 상기 환경 데이터를 조합하여 훈련 데이터셋(training data set)을 생성하고, 상기 훈련 데이터셋을 이용하여 상기 최적 환경 추정 알고리즘을 학습시킬 수 있다. The environment parameter estimator may generate a training data set by combining the behavioral propensity data and the environment data, and learn the optimal environment estimation algorithm using the training data set.
상기 환경 데이터는, 모이 제공량, 모이 섭취량, 월령, 동작 개체 증체량, 상기 사육장의 온도, 습도, 이산화탄소량, 외부 기온 중 적어도 하나를 포함할 수 있다. The environmental data may include at least one of feed amount, feed intake, age, moving object weight, temperature, humidity, carbon dioxide, and outside temperature of the kennel.
상기 환경 파라미터 추정부는, 상기 모이 제공량, 모이 섭취량, 월령, 동작 개체 증체량, 상기 사육장의 온도, 습도, 이산화탄소량, 외부 기온 중 적어도 하나와 상기 위치 분포 데이터 및 동작 데이터 중 적어도 하나의 상관성에 기초하여 상기 훈련 데이터셋을 생성할 수 있다. The environmental parameter estimating unit is based on a correlation between at least one of the feed amount, feed intake, age, moving object weight, temperature, humidity, carbon dioxide, and outside temperature of the breeding ground and at least one of the location distribution data and the operation data. The training dataset can be generated.
상기 최적 환경 파라미터는, 상기 사육장의 목표 온도, 목표 습도, 목표 급이량 및 목표 급수량 중 적어도 하나를 포함할 수 있다. The optimum environment parameter may include at least one of a target temperature, a target humidity, a target feed amount and a target water supply amount of the kennel.
상기 환경 파라미터 추정부는, 상기 행동 성향 데이터 및 환경 데이터와 각각에 대응하는 신뢰 범위에 기초하여 데이터 신뢰도를 산출하고, 상기 데이터 신뢰도와 기 설정된 임계값을 비교한 결과에 따라 상기 행동 성향 데이터 및 환경 데이터에 대한 경보 신호를 생성할 수 있다. The environmental parameter estimating unit calculates data reliability based on the behavioral propensity data and the environmental data and a confidence range corresponding to each of the environmental propensity data, and the behavioral propensity data and the environmental data according to a result of comparing the data reliability with a preset threshold. It can generate an alarm signal for.
상기 환경 파라미터 추정부는, 상기 경보 신호에 대한 사용자의 판단 결과를 저장하고, 상기 경보 신호에 대응하는 상기 행동 성향 데이터 및 환경 데이터가 입력되면 저장된 상기 사용자의 판단 결과를 이용하여 상기 데이터 신뢰도를 산출할 수 있다. The environment parameter estimator may store a result of the user's determination of the alarm signal, and calculate the data reliability using the stored user's decision result when the behavior tendency data and the environment data corresponding to the alarm signal are input. Can be.
상기 환경 파라미터 추정부는, 상기 환경 데이터에 기반한 추천 환경 파라미터와 상기 최적 환경 파라미터 중 적어도 하나에 기초하여 최종 환경 파라미터를 산출할 수 있다. The environment parameter estimator may calculate a final environment parameter based on at least one of a recommended environment parameter and the optimum environment parameter based on the environment data.
상기 환경 파라미터 추정부는, 상기 추천 환경 파라미터와 상기 환경 데이터에 기초하여 상기 추천 환경 파라미터 적용시 상기 사육장 환경의 악화 여부를 판단하며, 상기 사육장 환경이 악화된다고 판단되면 상기 최적 환경 파라미터를 상기 최종 환경 파라미터로 결정하고, 상기 사육장 환경이 좋아진다고 판단되면, 상기 최적 환경 파라미터와 상기 추천 파라미터를 조합하여 상기 최종 환경 파라미터를 산출할 수 있다. The environment parameter estimator determines whether the environment of the kennel deteriorates when the recommended environment parameter is applied based on the recommended environment parameter and the environment data, and determines that the optimal environment parameter is the final environment parameter when it is determined that the environment of the kennel deteriorates. If it is determined that the environment of the kennel improves, the final environmental parameter may be calculated by combining the optimal environment parameter with the recommended parameter.
상기 추천 환경 파라미터는, 기계 학습 기반의 추천 환경 추정 알고리즘을 포함하는 학습 서버에 의해 생성될 수 있다. The recommendation environment parameter may be generated by a learning server including a machine learning based recommendation environment estimation algorithm.
상기 학습 서버는, 상기 환경 데이터를 및 상기 사육장의 동작 개체 생산량을 조합하여 제2 훈련 데이터셋을 생성하고, 상기 환경 파라미터 추정부는, 상기 제2 훈련 데이터셋을 이용하여 상기 추천 환경 추정 알고리즘을 학습시킬 수 있다. The learning server generates a second training dataset by combining the environment data and the production amount of the moving object in the kennel, and the environment parameter estimating unit learns the recommended environment estimation algorithm using the second training dataset. You can.
상기 학습 서버는, 상기 사육장 이외의 타 사육장에 대한 환경 데이터를 및 동작 개체 생산량을 조합하여 제2 훈련 데이터셋을 생성하고, 상기 환경 파라미터 추정부는, 상기 제2 훈련 데이터셋을 이용하여 상기 추천 환경 추정 알고리즘을 학습시킬 수 있다. The learning server generates a second training dataset by combining environmental data for other breeding grounds other than the breeding ground and a moving object production amount, and the environment parameter estimating unit uses the second training dataset to generate the recommended environment. Train the estimation algorithm.
상기 학습 서버는, 날짜, 지역 및 장소 중 적어도 하나에 따라 상기 추천 환경 추정 알고리즘을 학습시킬 수 있다.The learning server may learn the recommended environment estimation algorithm according to at least one of a date, a region, and a place.
본 발명의 실시예에 따른 사육장 환경 관리 시스템은 사육장 내 기 설정된 위치에 배치되며, 상기 사육장 내 전경을 촬영하여 개체에 대한 정보가 포함된 영상 데이터를 생성하는 촬상 장치, 사육장 내 기 설정된 위치에 배치되며, 상기 사육장 내 환경을 계측하여 환경 데이터를 생성하는 센싱 장치, 그리고 상기 영상 데이터로부터 상기 사육장 내 동작 개체의 위치 및 움직임을 검출하여 상기 동작 개체에 대한 행동 성향 데이터를 생성하고, 상기 행동 성향 데이터와 상기 환경 데이터를 기계학습 기반의 최적 환경 추정 알고리즘에 적용하여 상기 동작 개체의 성장에 최적화된 최적 환경 파라미터를 추정하는 사육장 환경 관리 단말을 포함한다. The kennel environment management system according to the embodiment of the present invention is disposed at a preset position in a kennel, an imaging apparatus for generating an image data including information on an object by photographing the foreground in the kennel, and arranged at a preset position in the kennel. A sensing device for measuring environment in the kennel and generating environmental data, and detecting position and movement of the movement entity in the kennel from the image data to generate behavior propensity data for the movement entity, and the behavior propensity data And a kennel environment management terminal for applying the environment data to a machine learning-based optimal environment estimation algorithm to estimate an optimal environment parameter optimized for growth of the moving object.
상기 사육장 환경 관리 단말로부터 상기 최적 환경 파라미터를 수신하고, 상기 최적 환경 파라미터에 기초하여 상기 사육장 내 온도 및 습도 중 적어도 하나를 조절하는 공조 장치를 더 포함할 수 있다. The air conditioning apparatus may further include an air conditioning apparatus configured to receive the optimum environmental parameters from the kennel environment management terminal and to adjust at least one of temperature and humidity in the kennel based on the optimum environment parameters.
상기 센싱 장치는, 상기 사육장의 바닥면으로부터 일정 높이 이상의 위치에 배치될 수 있다. The sensing device may be disposed at a position higher than a predetermined height from the bottom surface of the kennel.
본 발명의 실시예에 따른 사육장 환경 관리 방법은 사육장 환경 관리 단말이 개체에 대한 정보가 포함된 영상 데이터로부터 사육장 내 동작 개체의 위치 또는 움직임 중 적어도 하나를 검출하여 상기 동작 개체에 대한 행동 성향 데이터를 생성하는 단계, 그리고 사육장 환경 관리 단말이 상기 행동 성향 데이터와 상기 사육장의 환경 데이터를 기계학습 기반의 최적 환경 추정 알고리즘에 적용하여 상기 동작 개체의 성장에 최적화된 최적 환경 파라미터를 추정하는 단계를 포함한다. In the kennel environment management method according to an embodiment of the present invention, the kennel environment management terminal detects at least one of the position or the movement of the moving object in the kennel from the image data including the information on the individual to the behavior propensity data for the moving object Generating, and estimating, by the kennel environment management terminal, the behavioral propensity data and the environment data of the kennel to an optimal environment estimation algorithm based on a machine learning to estimate an optimal environment parameter optimized for growth of the moving object. .
본 발명의 실시예에 따른 사육장 환경 관리 방법은 촬상 장치가 사육장 내 전경을 촬영하여 개체에 대한 정보가 포함된 영상 데이터를 생성하는 단계, 센싱 장치가 상기 사육장 내 환경을 계측하여 환경 데이터를 생성하는 단계, 사육장 환경 관리 단말이 상기 영상 데이터로부터 사육장 내 동작 개체의 위치 또는 움직임 중 적어도 하나를 검출하여 상기 동작 개체에 대한 행동 성향 데이터를 생성하는 단계, 사육장 환경 관리 단말이 상기 개체의 행동 성향과 상기 사육장의 환경 데이터를 기계학습 기반의 최적 환경 추정 알고리즘에 적용하여 상기 동작 개체의 성장에 최적화된 최적 환경 파라미터를 추정하는 단계, 그리고 공조 장치가 상기 사육장 환경 관리 단말로부터 상기 최적 환경 파라미터를 수신하고, 상기 최적 환경 파라미터에 기초하여 상기 사육장 내 온도 및 습도 중 적어도 하나를 조절하는 단계를 포함한다. In the kennel environment management method according to an embodiment of the present invention, the image pickup apparatus photographs the foreground in the kennel to generate the image data including the information on the object, the sensing device to measure the environment in the kennel to generate environmental data Step, the kennel environment management terminal detects at least one of the position or movement of the moving object in the kennel from the image data to generate behavioral propensity data for the moving object, the kennel environment management terminal and the behavioral propensity of the individual Estimating an optimal environment parameter optimized for growth of the moving object by applying environmental data of a kennel to a machine learning based optimal environment estimation algorithm, and an air conditioning apparatus receives the optimum environment parameter from the kennel environment management terminal, Based on the optimum environmental parameters Adjusting at least one of temperature and humidity in the kennel.
학습 서버가 현재 날짜, 상기 사육장이 위치한 지역 및 장소 중 적어도 하나에 따라 추천 환경 파라미터를 생성하여 상기 사육장 환경 관리 단말로 전송하는 단계, 및 상기 환경 데이터에 기반한 추천 환경 파라미터와 상기 최적 환경 파라미터 중 적어도 하나에 기초하여 최종 환경 파라미터를 산출하는 단계를 더 포함할 수 있다. Generating, by the learning server, a recommended environment parameter according to at least one of a current date, a region and a place where the kennel is located, and transmitting the recommended environment parameter to the kennel environment management terminal; and at least one of the recommended environment parameter and the optimal environment parameter based on the environment data. The method may further include calculating a final environmental parameter based on one.
본 발명의 실시예에 따른 통신 단말은 공조 장치와 통신하는 통신 프로세서; 및 촬영 영상을 입력받고, 상기 촬영 영상 내 개체의 위치와 상기 개체의 움직임 유무를 지시(indicating)하도록 픽셀 영역이 마스킹 된 영상을 출력하고, 상기 마스킹 된 영상 및 현재 온도 및 현재 습도 중 적어도 하나를 이용하여 상기 공조 장치의 목표 온도 및 목표 습도 중 적어도 하나를 조절하는 조절신호를 생성하는 제어부를 포함하고, 상기 조절신호를 상기 공조 장치로 전송한다. Communication terminal according to an embodiment of the present invention is a communication processor for communicating with the air conditioning apparatus; And receiving a captured image, outputting an image in which the pixel region is masked to instruct the position of the object in the captured image and whether the object is in motion, and outputting at least one of the masked image and the current temperature and the current humidity. And a controller configured to generate a control signal for adjusting at least one of a target temperature and a target humidity of the air conditioner, and transmit the control signal to the air conditioner.
사육장의 상태를 실시간 반영하여 사육장 환경을 관리함으로써 가축 생산량을 향상시킬 뿐만 아니라 가축 질병을 예방할 수 있는 장점이 있다. By managing the environment of the kennel by reflecting the state of the kennel in real time, there is an advantage that can improve livestock production and prevent livestock disease.
본 발명의 다양하면서도 유익한 장점과 효과는 상술한 내용에 한정되지 않으며, 본 발명의 구체적인 실시형태를 설명하는 과정에서 보다 쉽게 이해될 수 있을 것이다.Various and advantageous advantages and effects of the present invention are not limited to the above description, and will be more readily understood in the course of describing specific embodiments of the present invention.
도 1a는 본 발명의 일 실시예에 따른 사육장 환경 관리 시스템의 개념도이다. 1A is a conceptual diagram of a kennel environmental management system according to an embodiment of the present invention.
도 1b는 본 발명의 다른 실시예에 따른 사육장 환경 관리 시스템의 개념도이다. 1B is a conceptual diagram of a kennel environmental management system according to another embodiment of the present invention.
도 2는 본 발명의 실시예에 따른 촬상 장치의 구성도이다. 2 is a configuration diagram of an imaging device according to an embodiment of the present invention.
도 3은 본 발명의 실시예에 따른 촬상 장치의 배치를 설명하기 위한 도면이다. 3 is a view for explaining an arrangement of an imaging device according to an embodiment of the present invention.
도 4는 본 발명의 실시예에 따른 센싱 장치의 배치를 설명하기 위한 도면이다. 4 is a view for explaining the arrangement of the sensing device according to an embodiment of the present invention.
도 5는 본 발명의 실시예에 따른 사육장 환경 관리 단말의 구성도이다. 5 is a block diagram of a kennel environment management terminal according to an embodiment of the present invention.
도 6a는 본 발명의 일 실시예에 따른 사육장 환경 관리 단말의 사육장 환경 관리 방법에 대한 순서도이다.6A is a flowchart illustrating a method for managing a kennel environment of a kennel environment management terminal according to an exemplary embodiment of the present invention.
도 6b는 본 발명의 다른 실시예에 따른 사육장 환경 관리 단말의 사육장 환경 관리 방법에 대한 순서도이다.6B is a flowchart illustrating a kennel environment management method of the kennel environment management terminal according to another embodiment of the present invention.
도 7a는 본 발명의 일 실시예에 따른 사육장 환경 관리 시스템의 사육장 환경 관리 방법에 대한 순서도이다. 7A is a flowchart illustrating a kennel environment management method of a kennel environment management system according to an exemplary embodiment of the present invention.
도 7b는 본 발명의 다른 실시예에 따른 사육장 환경 관리 시스템의 사육장 환경 관리 방법에 대한 순서도이다.7B is a flowchart illustrating a kennel environment management method of the kennel environment management system according to another embodiment of the present invention.
도 8은 본 발명의 실시예에 따른 기계학습 기반의 분포량 예측 알고리즘을 설명하기 위한 도면이다.8 is a diagram for explaining a machine learning based distribution amount prediction algorithm according to an embodiment of the present invention.
도 9a는 본 발명의 일 실시예에 따른 최적 환경 파라미터 산출에 따른 데이터 흐름도를 나타낸 개념도이다.9A is a conceptual diagram illustrating a data flow according to calculation of an optimal environment parameter according to an embodiment of the present invention.
도 9b는 본 발명의 일 실시예에 따른 최적 환경 파라미터 산출에 따른 데이터 흐름도를 나타낸 개념도이다. 9B is a conceptual diagram illustrating a data flow according to calculation of an optimal environment parameter according to an embodiment of the present invention.
본 발명은 다양한 변경을 가할 수 있고 여러 가지 실시예를 가질 수 있는 바, 특정 실시예들을 도면에 예시하고 설명하고자 한다. 그러나, 이는 본 발명을 특정한 실시 형태에 대해 한정하려는 것이 아니며, 본 발명의 사상 및 기술 범위에 포함되는 모든 변경, 균등물 내지 대체물을 포함하는 것으로 이해되어야 한다. As the invention allows for various changes and numerous embodiments, particular embodiments will be illustrated and described in the drawings. However, this is not intended to limit the present invention to specific embodiments, it should be understood to include all modifications, equivalents, and substitutes included in the spirit and scope of the present invention.
제2, 제1 등과 같이 서수를 포함하는 용어는 다양한 구성요소들을 설명하는데 사용될 수 있지만, 상기 구성요소들은 상기 용어들에 의해 한정되지는 않는다. 상기 용어들은 하나의 구성요소를 다른 구성요소로부터 구별하는 목적으로만 사용된다. 예를 들어, 본 발명의 권리 범위를 벗어나지 않으면서 제2 구성요소는 제1 구성요소로 명명될 수 있고, 유사하게 제1 구성요소도 제2 구성요소로 명명될 수 있다. 및/또는 이라는 용어는 복수의 관련된 기재된 항목들의 조합 또는 복수의 관련된 기재된 항목들 중의 어느 항목을 포함한다. Terms including ordinal numbers, such as second and first, may be used to describe various components, but the components are not limited by the terms. The terms are used only for the purpose of distinguishing one component from another. For example, without departing from the scope of the present invention, the second component may be referred to as the first component, and similarly, the first component may also be referred to as the second component. The term and / or includes a combination of a plurality of related items or any item of a plurality of related items.
어떤 구성요소가 다른 구성요소에 "연결되어" 있다거나 "접속되어" 있다고 언급된 때에는, 그 다른 구성요소에 직접적으로 연결되어 있거나 또는 접속되어 있을 수도 있지만, 중간에 다른 구성요소가 존재할 수도 있다고 이해되어야 할 것이다. 반면에, 어떤 구성요소가 다른 구성요소에 "직접 연결되어" 있다거나 "직접 접속되어" 있다고 언급된 때에는, 중간에 다른 구성요소가 존재하지 않는 것으로 이해되어야 할 것이다. When a component is referred to as being "connected" or "connected" to another component, it may be directly connected to or connected to that other component, but it may be understood that other components may be present in between. Should be. On the other hand, when a component is said to be "directly connected" or "directly connected" to another component, it should be understood that there is no other component in between.
본 출원에서 사용한 용어는 단지 특정한 실시예를 설명하기 위해 사용된 것으로, 본 발명을 한정하려는 의도가 아니다. 단수의 표현은 문맥상 명백하게 다르게 뜻하지 않는 한, 복수의 표현을 포함한다. 본 출원에서, "포함하다" 또는 "가지다" 등의 용어는 명세서상에 기재된 특징, 숫자, 단계, 동작, 구성요소, 부품 또는 이들을 조합한 것이 존재함을 지정하려는 것이지, 하나 또는 그 이상의 다른 특징들이나 숫자, 단계, 동작, 구성요소, 부품 또는 이들을 조합한 것들의 존재 또는 부가 가능성을 미리 배제하지 않는 것으로 이해되어야 한다.The terminology used herein is for the purpose of describing particular example embodiments only and is not intended to be limiting of the present invention. Singular expressions include plural expressions unless the context clearly indicates otherwise. In this application, the terms "comprise" or "have" are intended to indicate that there is a feature, number, step, operation, component, part, or combination thereof described in the specification, and one or more other features. It is to be understood that the present invention does not exclude the possibility of the presence or the addition of numbers, steps, operations, components, components, or a combination thereof.
다르게 정의되지 않는 한, 기술적이거나 과학적인 용어를 포함해서 여기서 사용되는 모든 용어들은 본 발명이 속하는 기술 분야에서 통상의 지식을 가진 자에 의해 일반적으로 이해되는 것과 동일한 의미를 가지고 있다. 일반적으로 사용되는 사전에 정의되어 있는 것과 같은 용어들은 관련 기술의 문맥 상 가지는 의미와 일치하는 의미를 가지는 것으로 해석되어야 하며, 본 출원에서 명백하게 정의하지 않는 한, 이상적이거나 과도하게 형식적인 의미로 해석되지 않는다.Unless defined otherwise, all terms used herein, including technical or scientific terms, have the same meaning as commonly understood by one of ordinary skill in the art. Terms such as those defined in the commonly used dictionaries should be construed as having meanings consistent with the meanings in the context of the related art and shall not be construed in ideal or excessively formal meanings unless expressly defined in this application. Do not.
이하, 첨부된 도면을 참조하여 실시예를 상세히 설명하되, 도면 부호에 관계없이 동일하거나 대응하는 구성 요소는 동일한 참조 번호를 부여하고 이에 대한 중복되는 설명은 생략하기로 한다.DETAILED DESCRIPTION Hereinafter, exemplary embodiments will be described in detail with reference to the accompanying drawings, and the same or corresponding components will be given the same reference numerals regardless of the reference numerals, and redundant description thereof will be omitted.
도 1a는 본 발명의 일 실시예에 따른 사육장 환경 관리 시스템의 개념도이다. 1A is a conceptual diagram of a kennel environmental management system according to an embodiment of the present invention.
도 1에 도시된 바와 같이, 본 발명의 실시예에 따른 사육장 환경 관리 시스템은 촬상 장치(100), 센싱 장치(200), 사육장 환경 관리 단말(300) 및 공조 장치(400)를 포함할 수 있다. 여기서, 사육장은 가축을 사육하는 축사를 의미한다. 가축은 닭, 오리 등의 가금류뿐만 아니라, 소, 돼지 등 축사 내에서 집단으로 사육되는 다양한 종류의 동물일 수 있다.As shown in FIG. 1, the kennel environment management system according to the embodiment of the present invention may include an imaging device 100, a sensing device 200, a kennel environment management terminal 300, and an air conditioning device 400. . Here, the kennel means a livestock farm. The livestock may be not only poultry such as chickens and ducks, but also various kinds of animals bred in groups such as cattle and pigs.
우선, 촬상 장치(100)는 사육장 내의 환경을 촬영하고, 개체가 촬영된 영상 데이터를 사육장 환경 관리 단말(300)에 전송할 수 있다. 이를 위하여, 촬상 장치(100)는 사육장 환경 관리 단말(300)과 유선 또는 무선으로 통신할 수 있다. First, the imaging apparatus 100 may photograph an environment in a kennel, and transmit image data photographed by an individual to the kennel environment management terminal 300. To this end, the imaging apparatus 100 may communicate with the kennel environment management terminal 300 by wire or wirelessly.
사육장 내에는 복수의 촬상 장치(100)가 배치될 수 있다. 촬상 장치(100)는 이미지 센서에서 촬영한 영상 데이터를 사육장 환경 관리 단말(300)로 전송할 수 있다. 또는, 사육장내에는 별도의 데이터 수집장치가 배치되어 복수의 촬상 장치(100)로부터 영상 데이터를 수집하여 사육장 환경 관리 단말(300)로 전송할 수 있다. 사육장 내부의 상태를 정밀하게 분석하기 위하여 촬상 장치(100)의 영상 데이터는 고화질, 고용량의 특성을 가질 수 있다. 그러므로, 복수의 촬상 장치(100)에서 촬영된 영상 데이터를 실시간으로 원격의 사육장 환경 관리 단말(300)로 전송하기 위하여서는 큰 대역폭이 요구될 수 있으며, 이에 따라 전송 속도가 저하될 수 있다. 따라서, 별도의 데이터 수집장치에서는 사육장내의 촬상 장치(100)로부터 영상 데이터를 수집하여 인코딩 한 후 사육장 환경 관리 단말(300)로 전송함으로써 통신 대역폭을 저감시키고, 전송 속도를 향상시킬 수 있다. 또는, 촬상 장치(100)는 영상 데이터를 이용하여 사육장 상태를 분석하기 위한 1차 분석을 수행한 후, 가공된 데이터를 데이터 수집장치(미도시)에 전달하거나 또는 사육장 환경 관리 단말(300)에 전송할 수 있다. 즉, 촬상 장치(100)는 사육장의 상태 분석을 위하여 필요한 데이터만을 선별하여 데이터 수집장치에 전달하거나 또는 사육장 환경 관리 단말(300)에 전송함으로써 통신 자원을 효율적으로 관리할 수 있다. 또는 촬상 장치(100)는 사육장을 촬영한 영상 데이터를 이용하여 사육장 내부 상태를 1차적으로 분석하여 그 결과를 데이터 수집장치에 전달하거나 또는 사육장 환경 관리 단말(300)에 전송할 수 있다.A plurality of imaging devices 100 may be disposed in the kennel. The imaging apparatus 100 may transmit the image data photographed by the image sensor to the kennel environment management terminal 300. Alternatively, a separate data collection device may be disposed in the kennel to collect image data from the plurality of imaging devices 100 and transmit the image data to the kennel environment management terminal 300. In order to accurately analyze the state inside the kennel, the image data of the imaging apparatus 100 may have high quality and high capacity. Therefore, a large bandwidth may be required to transmit the image data photographed by the plurality of imaging devices 100 to the remote kennel environment management terminal 300 in real time, and thus the transmission speed may be reduced. Therefore, in a separate data collection device, by collecting and encoding the image data from the image capture device 100 in the kennel and transmitting the data to the kennel environment management terminal 300, the communication bandwidth can be reduced and the transmission speed can be improved. Alternatively, the imaging apparatus 100 performs the first analysis for analyzing the state of the kennel using the image data, and then transfers the processed data to a data collection device (not shown) or to the kennel environment management terminal 300. Can transmit That is, the imaging apparatus 100 may efficiently manage communication resources by selecting only the data necessary for analyzing the state of the kennel and transferring the data to the data collector or the kennel environment management terminal 300. Alternatively, the imaging apparatus 100 may primarily analyze the internal state of the kennel using the image data photographing the kennel and transmit the result to the data collection device or transmit the result to the kennel environment management terminal 300.
다음으로, 센싱 장치(200)는 사욕장 내의 환경 정보를 계측하고, 환경 정보가 포함된 환경 데이터를 생성하여 사육장 환경 관리 단말(300)로 전송할 수 있다. 이를 위하여, 센싱 장치(200)는 사육장 환경 관리 단말(300)과 유선 또는 무선으로 통신할 수 있다. 사육장 내에는 복수의 센싱 장치(200)가 배치될 수 있다. 복수의 센싱 장치(200)는 사육장의 환경을 계측한 환경 데이터를 사육장 환경 관리 단말(300)로 직접 전송할 수 있다. 또는, 사육장내에는 별도의 데이터 수집장치가 배치되어, 데이터 수집장치가 복수의 센싱 장치(200)로부터 환경 데이터를 수집하여 사육장 환경 관리 단말(300)로 전송할 수 있다. Next, the sensing device 200 may measure environment information in the bathing area, generate environment data including the environment information, and transmit the generated environment data to the kennel environment management terminal 300. To this end, the sensing device 200 may communicate with the kennel environment management terminal 300 by wire or wirelessly. A plurality of sensing devices 200 may be disposed in the kennel. The plurality of sensing devices 200 may directly transmit environment data measuring the environment of the kennel to the kennel environment management terminal 300. Alternatively, a separate data collection device may be disposed in the kennel, and the data collector may collect environmental data from the plurality of sensing devices 200 and transmit the environmental data to the kennel environment management terminal 300.
센싱 장치(200)는 여러 종류의 환경 정보를 계측하는 센서가 모듈화 된 장치일 수 있다. 예를 들어, 센싱 장치(200)는 온도 센서, 습도 센서, 가스 센서 등 환경 정보를 계측하기 위한 센서가 모듈화 된 장치일 수 있다. 복수의 센서가 모듈화된 복수의 센싱 장치(200)가 사육장의 여러 위치에 배치된 수 있다. 또는, 복수의 센싱 장치(200)는 상이한 환경 정보를 계측할 수 있다. 예를 들어, 제1 센싱 장치(200)는 사육장 내 온도를 계측하고, 제2 센싱 장치(200)는 사육장 내 습도를 계측할 수 있다. 이때, 동일한 종류의 환경 정보를 계측하는 센싱 장치(200)는 여러 개일 수 있다. 예를 들어, 제1 및 5 센싱 장치(200)는 사육장 내 온도를 계측하고, 제2 내지 4센싱 장치(200)는 사육장 내 습도를 계측할 수 있다.The sensing device 200 may be a device in which sensors for measuring various kinds of environmental information are modularized. For example, the sensing device 200 may be a device in which a sensor for measuring environmental information such as a temperature sensor, a humidity sensor, and a gas sensor is modularized. The plurality of sensing devices 200 in which a plurality of sensors are modularized may be disposed at various locations in the kennel. Alternatively, the plurality of sensing devices 200 may measure different environment information. For example, the first sensing device 200 may measure the temperature in the kennel, and the second sensing device 200 may measure the humidity in the kennel. In this case, the sensing device 200 measuring the same kind of environmental information may be several. For example, the first and fifth sensing apparatuses 200 may measure the temperature in the kennel, and the second to fourth sensing apparatuses 200 may measure the humidity in the kennel.
다음으로, 사육장 환경 관리 단말(300)은 촬상 장치(100)로부터 수신한 영상 데이터와 센싱 장치(200)로부터 수신한 환경 데이터를 이용하여 사육장 내 가축의 성장에 최적화 된 최적 환경 파라미터를 생성한다. Next, the kennel environment management terminal 300 uses the image data received from the imaging device 100 and the environment data received from the sensing device 200 to generate an optimal environment parameter optimized for the growth of livestock in the kennel.
사육장 환경 관리 단말(300)은 개체에 대한 정보가 포함된 영상 데이터로부터 사육장 내 가축의 위치 또는 움직임 중 적어도 하나를 검출하여 사육장 내 가축에 대한 행동 성향 데이터를 생성한다. 그리고 사육장 환경 관리 단말(300)은 행동 성향 데이터와 환경 데이터를 기계학습 기반의 최적 환경 추정 알고리즘에 적용하여 가축의 성장에 최적화된 최적 환경 파라미터를 추정한다. 그리고, 사육장 환경 관리 단말(300)은 사육장에 기반한 추천 환경 파라미터와 최적 환경 파라미터 중 적어도 하나에 기초하여 최종 환경 파라미터를 산출할 수 있다.The kennel environment management terminal 300 detects at least one of the position or movement of the livestock in the kennel from the image data including the information on the individual to generate behavioral propensity data for the livestock in the kennel. In addition, the kennel environment management terminal 300 estimates an optimal environmental parameter optimized for livestock growth by applying behavioral propensity data and environmental data to an optimal environment estimation algorithm based on machine learning. In addition, the kennel environment management terminal 300 may calculate the final environment parameter based on at least one of the recommendation environment parameter and the optimal environment parameter based on the kennel.
사육장 환경 관리 단말(300)은 퍼스널 컴퓨터(Personal Computer, PC), 태블릿 PC, 휴대 단말 등으로 구현될 수 있으며, 서버(server)나 클라우드(cloud)의 형태로 구현될 수도 있다. 사육장 환경 관리 단말(300)이 복수의 사육장으로부터 정보를 전송 받는 중앙 서버일 경우에 관리자는 사육장 환경 관리 단말(300)과의 접근성이 용이하지 않을 수 있다. 이런 경우, 사육장 환경 관리 단말(300)은 별도의 관리자의 휴대단말 등을 통하여 사육장 관리에 대한 정보를 전달 할 수 있다. 사육장 환경 관리 단말(300)에 대한 구체적인 내용은 아래에서 도면을 통해 상세하게 설명하도록 한다. The kennel environment management terminal 300 may be implemented as a personal computer (PC), a tablet PC, a portable terminal, or the like, or may be implemented in the form of a server or a cloud. When the kennel environment management terminal 300 is a central server that receives information from a plurality of kennels, the manager may not have easy access to the kennel environment management terminal 300. In this case, the kennel environment management terminal 300 may transmit information on the kennel management through a portable terminal of a separate administrator. Details of the kennel environment management terminal 300 will be described in detail with reference to the accompanying drawings.
다음으로, 공조 장치(400)는 사육장의 온도를 조절하는 장치이다. 공조 장치(400)는 사육장 환경 관리 단말(300)로부터 수신한 최적 환경 파라미터에 기초하여 사육장 내 온도 및 습도 중 적어도 하나를 조절할 수 있다. 예를 들어, "목표 온도 20도"라는 최적 환경 파라미터를 수신하였다고 가정한다. 이때, 사육장의 온도가 25도라면, 공조 장치(400)는 사육장의 실내 온도가 20도에 도달하도록 냉열원을 가동시킬 수 있다. 다른 예로,"목표 습도 40%"라는 최적 환경 파라미터를 수신하였다고 가정한다. 이때, 사육장의 습도가 70%라면, 공조 장치(400)는 사육장의 실내 습도가 40%에 도달하도록 송풍기를 가동시킬 수 있다. Next, the air conditioner 400 is a device for adjusting the temperature of the kennel. The air conditioning apparatus 400 may adjust at least one of temperature and humidity in the kennel based on the optimum environment parameter received from the kennel environment management terminal 300. For example, assume that an optimal environmental parameter of "target temperature 20 degrees" has been received. At this time, if the temperature of the kennel is 25 degrees, the air conditioning apparatus 400 may operate the cold heat source so that the room temperature of the kennel reaches 20 degrees. As another example, assume that an optimal environmental parameter of "target humidity 40%" has been received. At this time, if the humidity of the kennel is 70%, the air conditioning apparatus 400 may operate the blower so that the indoor humidity of the kennel reaches 40%.
한편, 본 발명의 실시예에 따른 사육장 환경 관리 시스템은 통신 단말(미도시)을 더 포함할 수 있다. On the other hand, the kennel environment management system according to an embodiment of the present invention may further include a communication terminal (not shown).
통신 단말은 통신 프로세서 및 제어부를 포함할 수 있다. The communication terminal may include a communication processor and a controller.
구체적으로, 통신 프로세서는 공조 장치(400)와 통신을 수행하며, 통신 단말의 제어부가 생성한 조절신호를 공조 장치로 전송할 수 있다. 또한, 통신 프로세서는 촬상 장치(100), 센싱 장치(200) 및 사육장 환경 관리 단말(300)과 통신을 수행하며, 촬영 영상과 같은 데이터를 수신할 수 있다. In detail, the communication processor communicates with the air conditioning apparatus 400 and transmits an adjustment signal generated by the controller of the communication terminal to the air conditioning apparatus. In addition, the communication processor may communicate with the imaging apparatus 100, the sensing apparatus 200, and the kennel environment management terminal 300, and may receive data such as a captured image.
제어부는 촬영 영상을 입력받고, 촬영 영상 내 개체의 위치와 개체의 움직임 유무를 지시(indicating)하도록 픽셀 영역이 마스킹 된 영상을 출력할 수 있다. 예를 들어, 제어부는 촬영 영상에 대한 동작 데이터 및 위치 분포 데이터가 촬영 영상의 픽셀 영역에 마스킹된 영상을 출력할 수 있다. 이때, 동작 데이터 및 위치 분포 데이터는 영역 별, 블록 별, 또는 픽셀 별로 나타내어질 수 있다. 본 명세서에서, 이상 개체 정보는 이상 개체 데이터와 혼용될 수 있다. 또는, 이상 개체 정보는 이상 개체 데이터로부터 얻어지는 정보일 수도 있다. 예를 들어, 원본의 촬영 영상의 픽셀에 객체가 존재할 확률이 높을수록, 마스킹된 영상의 해당 픽셀의 값은 높은 값을 가질 수 있다. 다른 예로, 영상 데이터의 구분된 영역 또는 블록 별로 해당되는 영역 또는 블록에 움직임이 존재했는지 여부를 나타내거나 픽셀 별로 해당되는 픽셀에 움직임이 존재했는지 여부를 나타낼 수 있다. The controller may receive a captured image and output an image in which the pixel area is masked to instruct the position of the object in the captured image and whether the object moves. For example, the controller may output an image in which motion data and position distribution data of the captured image are masked in a pixel area of the captured image. In this case, the motion data and the position distribution data may be represented by region, block, or pixel. In the present specification, the abnormal entity information may be mixed with the abnormal entity data. Alternatively, the abnormal entity information may be information obtained from abnormal entity data. For example, the higher the probability that an object exists in a pixel of the original captured image, the higher the value of the corresponding pixel of the masked image. As another example, it may indicate whether a motion exists in an area or a block corresponding to each divided area or block of the image data, or indicate whether a motion exists in a pixel corresponding to each pixel.
그리고, 제어부는 마스킹 된 영상 및 현재 온도 및 현재 습도 중 적어도 하나를 이용하여 공조 장치의 목표 온도 및 목표 습도 중 적어도 하나를 조절하는 조절신호를 생성할 수 있다. The controller may generate an adjustment signal for adjusting at least one of a target temperature and a target humidity of the air conditioning apparatus by using the masked image and at least one of the current temperature and the current humidity.
도 1b는 본 발명의 다른 실시예에 따른 사육장 환경 관리 시스템의 개념도이다. 1B is a conceptual diagram of a kennel environmental management system according to another embodiment of the present invention.
도 1b에 도시된 바와 같이, 본 발명의 다른 실시예에 따른 사육장 환경 관리 시스템은 촬상 장치(100), 센싱 장치(200), 사육장 환경 관리 단말(300) 및 공조 장치(400)를 포함하며, 통신 단말(미도시)를 포함할 수 있으며, 학습 서버(500)를 더 포함할 수 있다. 촬상 장치(100), 센싱 장치(200), 사육장 환경 관리 단말(300), 공조 장치(400) 및 통신 단말은 상기의 도 1a를 참조하여 설명한 내용과 동일한 바 여기선 구체적인 설명을 생략하도록 한다. As shown in FIG. 1B, the kennel environment management system according to another embodiment of the present invention includes an imaging device 100, a sensing device 200, a kennel environment management terminal 300, and an air conditioning device 400. It may include a communication terminal (not shown), and may further include a learning server 500. Since the imaging apparatus 100, the sensing apparatus 200, the kennel environment management terminal 300, the air conditioning apparatus 400, and the communication terminal are the same as those described with reference to FIG. 1A, detailed descriptions thereof will be omitted.
학습 서버(500)는 추천 환경 파라미터를 생성하는 기계 학습 기반의 추천 환경 추정 알고리즘을 포함하는 장치이다. 학습 서버(500)는 현재 날짜, 사육장이 위치한 지역 및 장소 중 적어도 하나에 따라 추천 환경 추정 알고리즘을 통해 추천 환경 파라미터를 생성할 수 있다. 학습 서버(500)는 제2 훈련 데이터를 통해 추천 환경 추정 알고리즘을 학습시킴으로써 추천 환경 파라미터의 적정성을 향상시킬 수 있다. 제2 훈련 데이터는 학습 서버(500)와 연결된 복수의 사육장 환경 관리 단말(300)로부터 획득한 환경 데이터 및 가축 생산량 정보로부터 생성될 수 있다. 학습 서버(400)는 퍼스널 컴퓨터(Personal Computer, PC), 태블릿 PC, 휴대 단말 등으로 구현될 수 있으며, 클라우드(cloud)의 형태로 구현될 수도 있다. 학습 서버(500)에 대한 구체적인 내용은 아래에서 도면을 통해 상세하게 설명하도록 한다.The learning server 500 is an apparatus including a machine learning based recommendation environment estimation algorithm for generating a recommendation environment parameter. The learning server 500 may generate a recommendation environment parameter through a recommendation environment estimation algorithm according to at least one of a current date, a region and a place where the kennel is located. The learning server 500 may improve the appropriateness of the recommendation environment parameter by learning the recommendation environment estimation algorithm through the second training data. The second training data may be generated from environmental data and livestock production information obtained from a plurality of farm environment management terminals 300 connected to the learning server 500. The learning server 400 may be implemented as a personal computer (PC), a tablet PC, a portable terminal, or the like, or may be implemented in the form of a cloud. Details of the learning server 500 will be described in detail with reference to the following drawings.
도 2는 본 발명의 실시예에 따른 촬상 장치의 구성도이다. 2 is a configuration diagram of an imaging device according to an embodiment of the present invention.
도 2를 참조하면, 촬상 장치(100)는 촬영부(111), 제어부(112), 제1 통신부(113)를 포함할 수 있으며, 인코딩부(114), 데이터베이스(115), 광원부(116), 팬틸트부(117)를 더 포함할 수 있다. 제어부(112), 인코딩부(114) 중 적어도 하나는 컴퓨터 프로세서 또는 칩에 의하여 구현될 수 있으며, 데이터베이스(115)는 메모리와 혼용될 수 있고, 통신부(113)는 안테나 또는 통신 프로세서 등과 혼용될 수 있다.Referring to FIG. 2, the imaging apparatus 100 may include a photographing unit 111, a control unit 112, and a first communication unit 113, and an encoding unit 114, a database 115, and a light source unit 116. , May further include a pan tilt portion 117. At least one of the control unit 112 and the encoding unit 114 may be implemented by a computer processor or a chip, the database 115 may be mixed with a memory, and the communication unit 113 may be mixed with an antenna or a communication processor. have.
우선, 촬영부(111)는 복수 개체를 포함하는 이미지를 촬영할 수 있다. 본 발명의 실시예에서 복수 개체는 사육장 내부에서 사육되는 가금류를 의미할 수 있다. 촬영부(111)는 복수 개체를 포함하는 이미지를 이용하여 영상 데이터를 생성할 수 있다. 하나의 제1영상 데이터는 단일 프레임을 의미할 수 있다. 촬영부(111)는 순차적으로 촬영되는 이미지를 이용하여 복수의 영상 데이터를 생성할 수 있다.First, the photographing unit 111 may photograph an image including a plurality of objects. In the exemplary embodiment of the present invention, the plurality of individuals may refer to poultry farmed in a kennel. The photographing unit 111 may generate image data by using an image including a plurality of objects. One first image data may mean a single frame. The photographing unit 111 may generate a plurality of image data using images sequentially photographed.
촬영부(111)는 COMS(complementary metal-oxide semiconductor) 모듈 또는 CCD(charge coupled device) 모듈 등을 이용하여 피사체를 촬영하는 이미지 센서일 수 있다. 이때, 입력되는 영상 프레임은 렌즈를 통해 촬영부(111) 내의 COMS 모듈 또는 CCD 모듈로 제공되고, COMS 모듈 또는 CCD 모듈은 렌즈를 통과한 피사체의 광신호를 전기적 신호(영상 데이터)로 변환하여 출력한다. The photographing unit 111 may be an image sensor photographing a subject by using a complementary metal-oxide semiconductor (COMS) module or a charge coupled device (CCD) module. At this time, the input image frame is provided to the COMS module or CCD module in the photographing unit 111 through the lens, the COMS module or CCD module converts the optical signal of the subject passing through the lens into an electrical signal (image data) and outputs it. do.
촬영부(111)는 시야각이 넓은 어안렌즈 또는 광각렌즈를 포함할 수 있다. 이에 따라, 하나의 촬상 장치(100)가 사육장 내부의 전체 공간을 촬영하는 것이 가능하다. The photographing unit 111 may include a fisheye lens or a wide angle lens having a wide viewing angle. Accordingly, it is possible for one imaging device 100 to photograph the entire space inside the kennel.
또한, 촬영부(111)는 깊이 카메라일 수 있다. 촬영부(111)는 다양한 깊이 인식 방식 중 어느 하나의 방식으로 구동될 수 있으며, 촬영부(111)를 통하여 촬영된 영상에는 깊이 정보가 포함될 수 있다. 촬영부(111)는 예를 들어, 키넥트 센서일 수 있다. 키넥트 센서는 구조광 투영 방식의 깊이 카메라로서, 프로젝터나 레이저를 이용하여 정의된 패턴 영상을 투영시키고 카메라를 통하여 패턴이 투영된 영상을 획득함으로써 장면의 삼차원 정보를 획득할 수 있다. 이러한 키넥트 센서는 적외선 레이저를 이용해 패턴을 조사하는 적외선 방사체, 및 적외선 영상을 촬영하는 적외선 카메라를 포함하며, 일반적인 웹캠과 같은 기능을 하는 RGB 카메라가 적외선 방사체와 적외선 카메라 사이에 배치되어 있다. 이 외에도, 키넥트 센서에는 마이크 배열과 카메라의 각도를 조절하는 팬틸트부(117)가 더 구성될 수 있다.In addition, the photographing unit 111 may be a depth camera. The photographing unit 111 may be driven by any one of various depth recognition methods, and the depth information may be included in the image photographed by the photographing unit 111. The photographing unit 111 may be, for example, a Kinect sensor. Kinect sensor is a depth camera of the structured light projection method, it is possible to obtain a three-dimensional information of the scene by projecting a pattern image defined using a projector or a laser, and obtains the image projected pattern through the camera. These Kinect sensors include infrared emitters that irradiate patterns using infrared lasers, and infrared cameras that capture infrared images. An RGB camera that functions like a typical webcam is disposed between the infrared emitter and the infrared camera. In addition to this, the Kinect sensor may further include a pan tilt unit 117 for adjusting the angle of the microphone array and the camera.
키넥트 센서의 기본적인 원리는, 적외선 방사체에서 조사된 레이저 패턴이 물체에 투영되어 반사되면, 반사 지점에서의 패턴의 위치 및 크기를 이용해 물체 표면까지의 거리를 구하게 된다. 이러한 원리에 따라, 촬영부(111)는 축사 내 공간으로 레이저 패턴을 조사하고, 개체에서 반사된 레이저 패턴을 센싱하여 개체 별 깊이 정보를 포함하는 영상 데이터를 생성할 수 있다.The basic principle of the Kinect sensor is that when the laser pattern irradiated from the infrared emitter is projected and reflected on the object, the distance to the surface of the object is obtained using the position and size of the pattern at the reflection point. According to this principle, the photographing unit 111 may generate the image data including depth information for each object by irradiating a laser pattern into the space in the barn and sensing the laser pattern reflected from the object.
다음으로, 제어부(112)는 촬상 장치(100) 전반의 동작을 제어한다. 일례로, 제어부(112)는 촬영부(111)를 제어하여 이상 개체가 있는 특정 영역을 추적 촬영할 수도 있다. 추적 촬영 대상은 유저 인터페이스부(미도시)를 통하여 설정되거나 또는 사육장 환경 관리 단말의 제어 명령을 통하여 설정될 수도 있다. 제어부(112)는 촬영부(111)를 제어하여 이상개체가 있는 특정 영역을 추적 촬영하여 영상 데이터를 생성하게 함으로써 지속적인 모니터링을 수행할 수 있게 한다.Next, the control unit 112 controls the overall operation of the imaging apparatus 100. For example, the controller 112 may control the photographing unit 111 to follow-up the specific region in which the abnormal object is located. The tracking photographing target may be set through a user interface unit (not shown) or through a control command of a kennel environment management terminal. The control unit 112 controls the photographing unit 111 to track and photograph a specific area in which an abnormal object exists to generate image data so that continuous monitoring can be performed.
이때, 제어부(112)는 팬틸트부(117)를 제어하여 추적 촬영을 수행할 수 있다. 팬틸트부(117)는 팬(Pan, 수평방향) 및 틸트(Tilt, 수직 방향) 2개의 모터를 구동하여 촬영부(111)의 촬영 영역을 제어할 수 있다. 팬틸트부(117)는 제어부(112)의 제어에 따라 특정 영역을 촬영하기 위하여 촬영부(111)의 지향 방향을 조절할 수 있다. 또한, 팬틸트부(117)는 제어부(112)의 제어에 따라 특정 개체를 트래킹하기 위하여 촬영부(111)의 지향 방향을 조절할 수 있다.In this case, the controller 112 may control the pan tilt unit 117 to perform tracking shooting. The pan tilt unit 117 may control a photographing area of the photographing unit 111 by driving two motors, a pan and a tilt. The pan tilt unit 117 may adjust the directing direction of the photographing unit 111 to photograph a specific area under the control of the controller 112. In addition, the pan tilt unit 117 may adjust the directing direction of the photographing unit 111 to track a specific object under the control of the controller 112.
다음으로, 제1 통신부(113)는 타 촬상 장치(100), 사육장 환경 관리 단말 중 적어도 하나와 데이터 통신을 수행할 수 있다. 예를 들면, 제1 통신부(113)는 무선랜(Wireless LAN: WLAN), 와이 파이(Wi-Fi), 와이브로(Wireless Broadband: Wibro), 와이맥스(World Interoperability for Microwave Access: Wimax), HSDPA(High Speed Downlink Packet Access), IEEE 802.16, 롱 텀 에볼루션(Long Term Evolution: LTE), 광대역 무선 이동 통신 서비스(Wireless Mobile Broadband Service: WMBS) 등의 원거리 통신 기술을 사용하여 데이터 통신을 수행할 수 있다.Next, the first communication unit 113 may perform data communication with at least one of the other imaging apparatus 100 and the kennel environment management terminal. For example, the first communication unit 113 may include a wireless LAN (WLAN), a Wi-Fi, a Wi-Fi, a WiMAX, a World Interoperability for Microwave Access (Wimax), and an HSDPA (High). Data communication may be performed using telecommunication technologies such as Speed Downlink Packet Access), IEEE 802.16, Long Term Evolution (LTE), and Wireless Mobile Broadband Service (WMBS).
또는, 제1 통신부(113)는 블루투스, RFID(RadioFrequency Identification), 적외선 통신(Infrared Data Association: IrDA), UWB(Ultra Wideband), 지그비, 인접 자장 통신(NFC) 등이 포함될 수 있다. 또한, 유선 통신 기술로는, USB 통신, 이더넷(Ethernet), 시리얼 통신(serial communication), 광/동축 케이블 등의 근거리 통신 기술을 사용하여 데이터 통신을 수행할 수 있다.Alternatively, the first communication unit 113 may include Bluetooth, RadioFrequency Identification (RFID), Infrared Data Association (IrDA), Ultra Wideband (UWB), Zigbee, and Near Field Communication (NFC). In addition, as a wired communication technology, data communication may be performed using a short-range communication technology such as USB communication, Ethernet, serial communication, and optical / coaxial cable.
예를 들면, 제1 통신부(113)는 근거리 통신 기술을 사용하여 타 이상 개체 검출 장치와 데이터 통신을 수행하고, 원거리 통신 기술을 사용하여 사육장 환경 관리 단말와 데이터 통신을 수행할 수 있다, 그러나 이에 한정되는 것은 아니고, 사육장의 제반 사항 등을 고려하여 다양한 통신 기술이 사용될 수 있다.For example, the first communication unit 113 may perform data communication with another abnormality object detecting apparatus using a short range communication technique, and may perform data communication with a kennel environment management terminal using a telecommunication technique, but is not limited thereto. Various communication technologies may be used in consideration of various matters of the kennel.
제1 통신부(113)는 촬영부(111)에서 촬영한 영상 데이터를 사육장 환경 관리 단말에게 전송할 수 있다. 제1 통신부(113)를 통하여 전송되는 영상 데이터는 인코딩부(114)를 통하여 인코딩된 압축 데이터일 수 있다.The first communication unit 113 may transmit the image data photographed by the photographing unit 111 to the kennel environment management terminal. The image data transmitted through the first communication unit 113 may be compressed data encoded through the encoding unit 114.
다음으로, 인코딩부(114)는 촬영부(111)에서 촬영한 영상 데이터를 디지털 신호로 부호화한다. 예를 들면, 인코딩부(114)는 H.264, H.265, MPEG(Moving Picture Experts Group), M-JPEG(Motion Joint Photographic Experts Group) 표준에 따라 영상 데이터를 인코딩 할 수 있다.Next, the encoder 114 encodes the image data photographed by the photographing unit 111 into a digital signal. For example, the encoding unit 114 may encode image data according to H.264, H.265, Moving Picture Experts Group (MPEG), and Motion Joint Photographic Experts Group (M-JPEG) standards.
다음으로, 데이터베이스(115)는 플래시 메모리 타입(Flash Memory Type), 하드 디스크 타입(Hard Disk Type), 멀티미디어 카드 마이크로 타입(Multimedia Card Micro Type), 카드 타입의 메모리(예를 들면, SD 또는 XD 메모리등), 자기 메모리, 자기 디스크, 광디스크, 램(Random Access Memory: RAM), SRAM(Static Random Access Memory), 롬(Read-Only Memory: ROM), EEPROM(Electrically Erasable Programmable Read-Only Memory), PROM(Programmable Read-Only Memory) 중 적어도 하나의 저장매체를 포함할 수 있다. 또한, 촬상 장치(100)는 인터넷(internet) 상에서 데이터베이스(115)의 저장 기능을 수행하는 웹 스토리지(web storage)를 운영하거나, 또는 웹 스토리지와 관련되어 동작할 수도 있다.Next, the database 115 includes a flash memory type, a hard disk type, a multimedia card micro type, and a card type memory (for example, SD or XD memory). Etc.), magnetic memory, magnetic disk, optical disk, random access memory (RAM), static random access memory (SRAM), read-only memory (ROM), electrically erasable programmable read-only memory (EPM), PROM It may include at least one storage medium of (Programmable Read-Only Memory). In addition, the imaging apparatus 100 may operate a web storage that performs a storage function of the database 115 on the Internet, or may operate in connection with the web storage.
데이터베이스(115)는 촬영부(111)에서 촬영한 영상 데이터를 저장할 수 있으며, 과거 일정 기간 동안의 영상 데이터를 저장할 수 있다. 또한, 데이터베이스(115)는 촬상 장치(100)가 동작하는데 필요한 데이터와 프로그램 등을 저장할 수 있다. 또한, 데이터베이스(115)는 다양한 사용자 인터페이스(User Interface: UI) 또는 그래픽 사용자 인터페이스(Graphic User Interface: GUI)를 저장할 수 있다.The database 115 may store image data photographed by the photographing unit 111 and may store image data for a predetermined period of time. In addition, the database 115 may store data, a program, and the like necessary for the imaging apparatus 100 to operate. In addition, the database 115 may store various user interfaces (UIs) or graphical user interfaces (GUIs).
다음으로, 광원부(116)는 제어부(112)의 제어에 따라 지향하는 방향으로 광을 조사할 수 있다. 예를 들면, 광원부(116)는 적어도 하나의 레이저 다이오드(laser diode, LD), 발광 다이오드(light emitting diode, LED)를 포함할 수 있다. 광원부(116)는 제어부(112)의 제어에 따라 다양한 파장대의 광을 조사할 수 있다.Next, the light source unit 116 may irradiate light in a direction directed under the control of the control unit 112. For example, the light source unit 116 may include at least one laser diode (LD) and a light emitting diode (LED). The light source unit 116 may emit light of various wavelength bands under the control of the controller 112.
예를 들면, 광원부(116)는 야간 촬영을 위하여 적외선 파장대의 광을 조사할 수 있다. 또는, 광원부(116)는 사육장 내 가축의 광화학 치료(photochemotherapy)를 위하여 자외선 파장대의 광을 조사할 수도 있다.For example, the light source unit 116 may irradiate light in the infrared wavelength band for night photographing. Alternatively, the light source unit 116 may irradiate light in the ultraviolet wavelength band for photochemotherapy of livestock in the kennel.
도 3은 본 발명의 실시예에 따른 촬상 장치의 배치를 설명하기 위한 도면이다. 3 is a view for explaining an arrangement of an imaging device according to an embodiment of the present invention.
일 실시예에 따르면, 도 3의 (a)에서와 같이, 촬상 장치(100)는 1개로 구현되어, 사육장(10) 내 기 설정된 위치에 배치될 수 있다. 촬상 장치(100)는 사육장(10) 내 전경을 촬영하여 개체에 대한 정보가 포함된 영상 데이터를 생성하기 위하여 촬상 장치(100)의 시야각 등을 고려하여 배치된다. 즉, 촬상 장치(100)는 사육장(10) 내 전경이 전부 촬영될 수 있는 위치에 배치될 수 있다. 예를 들어, 사육장(10) 상부에 배치될 수 있으며, 사육장(10) 측부에 배치될 수도 있다. According to an embodiment, as shown in FIG. 3A, the imaging apparatus 100 may be implemented as one, and may be disposed at a predetermined position in the kennel 10. The imaging apparatus 100 is disposed in consideration of the viewing angle of the imaging apparatus 100 to generate image data including information about an object by photographing the foreground in the kennel 10. That is, the imaging apparatus 100 may be disposed at a position where the entire foreground of the kennel 10 may be photographed. For example, it may be disposed above the kennel 10, it may be arranged on the side of the kennel 10.
다른 예로, 도 3의 (b) 및 도 3의 (c)에서와 같이, 촬상 장치(100)는 복수로 구현되어 사육장(10) 내 기 설정된 여러 장소에 배치될 수 있다. 복수의 촬상 장치(100)는 사육장(10) 내 전경을 촬영하여 개체에 대한 정보가 포함된 영상 데이터를 생성하기 위하여 촬상 장치(100)의 시야각 등을 고려하여 사육장(10) 내 여러 장소에 배치된다. 즉, 촬상 장치(100)는 사육장(10) 내 전경이 전부 촬영될 수 있는 위치에 배치될 수 있다. 예를 들어, 복수의 촬상 장치(100)는 사육장(10) 상부 및 측부에 배치될 수 있다. As another example, as illustrated in FIGS. 3B and 3C, the imaging apparatus 100 may be implemented in plural and disposed at various preset locations in the kennel 10. The plurality of imaging apparatuses 100 are disposed at various places in the kennel 10 in consideration of the viewing angle of the imaging apparatus 100 to generate image data including information about an object by photographing the foreground in the kennel 10. do. That is, the imaging apparatus 100 may be disposed at a position where the entire foreground of the kennel 10 may be photographed. For example, the plurality of imaging devices 100 may be disposed on the upper and side portions of the kennel 10.
한편, 사육장(10)이 복수인 경우, 촬상 장치(100)는 사육장(10) 별로 배치될 수 있으며, 사육장(10) 별로 복수의 촬상 장치(100)가 배치될 수 있다. Meanwhile, when there are a plurality of kennels 10, the imaging apparatus 100 may be arranged for each of the kennels 10, and the plurality of imaging apparatuses 100 may be arranged for each of the kennels 10.
도 4는 본 발명의 실시예에 따른 센싱 장치의 배치를 설명하기 위한 도면이다. 4 is a view for explaining the arrangement of the sensing device according to an embodiment of the present invention.
센싱 장치(200)는 사육장(10) 내 기 설정된 위치에 배치되어, 사육장(10) 내 환경 정보를 계측하여 환경 데이터를 생성한다. 이때, 센싱 장치(200)는 도 4에 도시된 바와 같이, 사육장(10)의 바닥면으로부터 일정 높이 이상의 위치에 배치될 수 있다. 일정 높이는 사육장(10) 내 가축의 행동 반경에 기초하여 결정될 수 있다. 예를 들어, 가축이 닭인 경우, 닭이 날개짓으로 닿을 수 있는 높이보다 높은 위치에 센싱 장치(200)를 배치할 수 있다. The sensing device 200 is disposed at a predetermined position in the kennel 10 to measure environment information in the kennel 10 to generate environment data. In this case, as illustrated in FIG. 4, the sensing device 200 may be disposed at a position higher than a predetermined height from the bottom surface of the kennel 10. The predetermined height may be determined based on the radius of action of the livestock in the kennel 10. For example, when the livestock is a chicken, the sensing device 200 may be disposed at a position higher than a height at which the chicken may reach the wing.
센싱 장치(200)의 경우, 크기가 소형이고 내구성이 높지 않아 파손이나 고장이 쉽게 발생할 수 있다. 이러한 센싱 장치(200)를 사육장(10) 내 가축의 행동 반경 이내에 설치할 경우, 가축이 센서를 먹이로 오인하여 센싱 장치(200)를 파손할 수 있다. 따라서, 센싱 장치(200)를 사육장(10)의 바닥면으로부터 일정 높이 이상의 위치에 배치하여 파손을 막을 수 있다. In the case of the sensing device 200, since the size is small and the durability is not high, breakage or failure may easily occur. When the sensing device 200 is installed within the action radius of the livestock in the kennel 10, the livestock may damage the sensing device 200 by misunderstanding the sensor as food. Therefore, the sensing device 200 may be disposed at a position higher than a predetermined height from the bottom surface of the kennel 10 to prevent breakage.
도 5는 본 발명의 실시예에 따른 사육장 환경 관리 단말의 구성도이다. 5 is a block diagram of a kennel environment management terminal according to an embodiment of the present invention.
도 5에 도시된 바와 같이, 본 발명의 실시예에 따른 사육장 환경 관리 단말(300)은 영상 분석부(310) 및 환경 파라미터 추정부(320)를 포함하며, 통신부를 더 포함할 수 있다. 그리고 영상 분석부(310)는 제1 분석 유닛(311) 및 제2 분석 유닛(312)을 포함할 수 있다. As shown in FIG. 5, the kennel environment management terminal 300 according to the embodiment of the present invention includes an image analyzer 310 and an environment parameter estimator 320, and may further include a communication unit. The image analyzer 310 may include a first analysis unit 311 and a second analysis unit 312.
우선, 영상 분석부(310)는 개체에 대한 정보가 포함된 영상 데이터로부터 사육장 내 가축의 위치 또는 움직임 중 적어도 하나를 검출하여 사육장 내 가축에 대한 행동 성향 데이터를 생성한다. 행동 성향 데이터는 가축에 대한 위치 분포 데이터 및 동작 데이터 중 적어도 하나를 포함한다. 위치 분포 데이터는 영상 데이터로부터 가축의 위치를 검출하여 생성되며, 동작 데이터는 영상 데이터로부터 가축의 움직임을 검출하여 생성된다. 영상 분석부(310)는 영상 데이터를 복수 영역으로 구분하고, 복수 영역별로 가축의 활동량 및 분포량 중 적어도 하나를 계산한다. 예를 들어, 영상 데이터를 24개 영역으로 구분하는 경우, 하나의 프레임으로부터 24개의 영역 각각에 대한 활동성 및 분포도가 생성될 수 있다. 여기서, 가축의 활동성이란 구분된 영역에서 모션 벡터량을 의미할 수 있으며, 가축의 분포도란 구분된 영역에서 검출된 가축의 밀도를 의미할 수 있다. First, the image analyzer 310 detects at least one of the position or movement of the livestock in the kennel from the image data including the information on the individual to generate behavioral propensity data for the livestock in the kennel. Behavioral propensity data includes at least one of location distribution data and behavioral data for livestock. The position distribution data is generated by detecting the position of the livestock from the image data, and the motion data is generated by detecting the movement of the livestock from the image data. The image analyzer 310 divides the image data into a plurality of regions, and calculates at least one of an activity amount and a distribution amount of livestock for each of the plurality of regions. For example, when the image data is divided into 24 regions, the activity and distribution of each of the 24 regions may be generated from one frame. Here, the activity of the livestock may mean the amount of motion vector in the divided region, and the distribution of the livestock may mean the density of the livestock detected in the divided region.
이때, 영상 분석부(310)는 영상 데이터를 생성하는 촬상 장치의 높이, 방향, 렌즈 왜곡 정보 중 적어도 하나에 기초하여 복수 영역 각각의 실제 면적이 동일하도록 영상 데이터를 복수 영역으로 구분할 수 있다. 렌즈 등의 왜곡 등으로 인해 영상 데이터를 동일한 면적으로 구분하더라도 각 영역의 실제 면적은 동일하지 않을 수 있다. 따라서, 영상 데이터 자체를 동일한 면적으로 구분하여 각 영역의 활동량 및 분포량을 계산하는 경우, 각 영역의 실제 면적이 상이하므로 데이터 신뢰도에 문제가 발생할 수 있다. 예를 들어, 영상 데이터를 영상에서 동일 면적으로 구분하고, 복수 영역 중 A 영역에 대응하는 실제 면적은 10m2이고 B 영역에 대응하는 실제 면적은 20m2이라고 가정한다. 이때, A 영역에서 검출된 개체수는 30이고 B영역에서 검출된 개체수는 40인 경우, 실제로는 A 영역의 분포도가 높으나, 계산 결과는 B 영역의 분포도가 높게 산출된다. 이러한 문제점을 해결하고자, 본 발명의 실시예에 따른 영상 분석부(310)는 복수 영역 각각의 실제 면적이 동일하도록 영상 데이터를 복수 영역으로 구분할 수 있다. In this case, the image analyzer 310 may classify the image data into a plurality of regions such that the actual area of each of the plurality of regions is the same based on at least one of height, direction, and lens distortion information of the imaging apparatus generating the image data. Even if image data is divided into the same area due to distortion of a lens or the like, the actual area of each area may not be the same. Therefore, when calculating the amount of activity and distribution of each area by dividing the image data itself into the same area, the actual area of each area is different, which may cause a problem in data reliability. For example, it is assumed that image data is divided into the same area in an image, and an actual area corresponding to an area A of the plurality of areas is 10 m 2 and an actual area corresponding to an area B is 20 m 2 . In this case, when the number of individuals detected in the area A is 30 and the number of individuals detected in the area B is 40, the distribution of the area A is high, but the calculation result is calculated to be the distribution of the area B high. To solve this problem, the image analyzer 310 according to an embodiment of the present invention may divide the image data into a plurality of regions such that the actual areas of the plurality of regions are the same.
그러면, 위치 분포 데이터를 생성하는 과정을 구체적으로 살펴본다. 영상 분석부(310)에 포함된 제1 분석 유닛(311)은 영상 데이터 상에서 가축 개체를 검출하여 위치 분포 데이터를 생성할 수 있다. 즉, 제1 분석 유닛(311)은 가축 개체를 검출하여 가축의 분포량을 계산하는 분포량 예측 알고리즘에 영상 데이터를 입력하여 위치 분포 데이터를 생성할 수 있다. 분포량 예측 알고리즘은 기계학습 기반의 알고리즘일 수 있다. 구체적으로, 제1 분석 유닛(311)은 영상 데이터로부터 개체의 에지를 검출하고, 검출된 개체의 에지와 기 저장된 비교 DB에 기초하여 복수 영역별 개체의 분포량을 계산하여 위치 분포 데이터를 생성할 수 있다. 여기서, 개체는 가축뿐만 아니라 급이기 등을 포함하는 사육장의 배경을 의미할 수 있다. Next, the process of generating position distribution data will be described in detail. The first analysis unit 311 included in the image analyzer 310 may generate location distribution data by detecting the livestock individual on the image data. That is, the first analysis unit 311 may generate position distribution data by inputting image data to a distribution amount prediction algorithm that detects a livestock individual and calculates a distribution amount of the livestock. The distribution prediction algorithm may be a machine learning based algorithm. In detail, the first analysis unit 311 may detect the edge of the object from the image data and generate position distribution data by calculating a distribution amount of the object for each of the plurality of regions based on the detected edge of the object and a previously stored comparison DB. have. Here, the individual may mean a background of a kennel including a feeder as well as a livestock.
일 실시예로, 제1 분석 유닛(311)은 영상 데이터에서 개체의 외곽선을 검출하고, 검출된 외곽선과 비교 DB에 미리 저장된 동물 개체의 외형을 비교하여 미리 저장된 동물 개체의 외형과 매칭되는 외곽선을 가진 개체를 가축으로 검출할 수 있다. 이때, 비교 DB에 저장된 가축의 외형은 적어도 하나 이상의 가축의 외형일 수 있으며, 이상 개체 분석부는 상술한 바와 같이 매칭되는 외곽선을 가진 개체를 가축으로서 검출함과 동시에 해당 가축의 종류도 판단할 수 있다.In one embodiment, the first analysis unit 311 detects the outline of the object in the image data, compares the detected outline with the appearance of the animal object previously stored in the comparison DB to determine the outline matching the appearance of the animal object previously stored. Livestock can be detected with livestock. In this case, the appearance of the livestock stored in the comparison DB may be the appearance of at least one or more livestock, and the abnormal individual analysis unit detects the individual having the matching outline as the livestock as described above and may also determine the type of the livestock. .
다른 실시예로, 제1 분석 유닛(311)은 영상 데이터 내의 개체의 특징점을 추출하고, 추출된 특징점이 비교 DB에 미리 저장된 가축의 특징점에 임계치 이상의 근접도로 매칭되면, 해당 영상 데이터 내의 개체를 가축으로서 검출할 수 있다. 이때, 제1 분석 유닛(311)은 비교 대상이 되는 두 개체의 영상에서 특징점을 추출하고, 추출된 두 개체의 특징점 기술자(descriptor)를 매칭하는 SIFT(Scale Invariant Feature Transform) 또는SURF(Speeded Up Robust Features) 알고리즘을 사용할 수 있다.In another embodiment, the first analysis unit 311 extracts a feature point of the entity in the image data, and if the extracted feature point matches the feature point of the animal previously stored in the comparison DB with a proximity greater than or equal to a threshold, the entity in the image data is domesticated. Can be detected as. In this case, the first analysis unit 311 extracts feature points from images of two objects to be compared, and scale invariant feature transform (SIFT) or speeded up robust (SURF) matching the extracted feature descriptors of the extracted two objects. Features) Algorithms can be used.
다른 실시예로, 제1 분석 유닛(311)은 영상 데이터에서 개체들의 윤곽을 기초로 가축을 검출할 수 있다. 보다 구체적으로, 제1 분석 유닛(311)은 영상 데이터에서 개체들의 윤곽을 검출하여 에지 영상을 생성하고, 비교 DB(118)에 미리 저장된 사육장의 배경 영상인 전경 영상 데이터로부터 윤곽을 검출하여 배경 에지 영상을 생성하며, 에지 영상에서 배경 에지 영상을 뺀 차 영상(different image) 에서 가축을 검출할 수 있다. 이때, 제1 분석 유닛(311)은 영상 데이터 프레임의 그래디언트(gradient) 정보를 이용하여 프레임 내에 나타나는 개체의 윤곽을 에지로 검출하여 에지 영상을 생성한다. 여기서, 그래디언트 정보는 프레임에서 소정의 화소들 중 인접하는 화소들 간의 차이값으로부터 생성된 값으로서 차이의 절대값의 합을 의미하고, 에지는 그래디언트 정보를 이용한 개체 간의 경계선을 의미한다.In another embodiment, the first analysis unit 311 may detect livestock based on the contours of the objects in the image data. More specifically, the first analysis unit 311 generates an edge image by detecting the contours of the objects in the image data, and detects the contour from the foreground image data, which is a background image of the kennel, which is pre-stored in the comparison DB 118, and thus the background edge. An image may be generated and livestock may be detected from a differential image obtained by subtracting a background edge image from an edge image. In this case, the first analyzing unit 311 generates an edge image by detecting an edge of an object appearing in the frame using the gradient information of the image data frame. Here, the gradient information is a value generated from a difference value between adjacent pixels among predetermined pixels in a frame, and means a sum of absolute values of differences, and an edge means a boundary between objects using gradient information.
다른 실시예로, 제1 분석 유닛(311)은 기촬영된 사육장 내 전경의 영상 데이터에서 배경에 해당하는 개체의 에지를 검출하여 배경 에지 영상을 생성할 수 있다. 이때의 배경 에지 영상은 기설정된 영역의 개체들의 윤곽을 배경에지로 검출한 영상일 수 있으나, 기촬영된 사육장 내 전경의 복수개의 영상 데이터 프레임을 비교하여 소정의 횟수이상 반복하여 동일하게 나타나는 개체의 윤곽을 배경에지로 검출한 영상일 수도 있다.In another embodiment, the first analysis unit 311 may generate a background edge image by detecting an edge of an object corresponding to a background from image data of a foreground in a pre-scanned farm. In this case, the background edge image may be an image obtained by detecting the contours of the objects of the preset area with the background edge, but comparing the plurality of image data frames of the foreground in the pre-scanned kennel and repeating the predetermined number of times or more. The image may be an image of which the contour is detected as a background edge.
다른 실시예로, 제1 분석 유닛(311)은 개체 검출 분류기를 이용하여 영상 데이터에서 가축을 검출할 수 있다. 이때, 개체 검출 분류기는 가축의 자세나 외부 환경을 달리하여 기촬영한 가축의 영상들로부터 훈련 DB 를 구축하여 학습된 것으로서, 이러한 개체 검출 분류기는 SVM(Support Vector Machine), 신경망, AdaBoost 알고리즘 등을 포함하는 다양한 학습 알고리즘을 통해 가축의 비교 DB 를 생성한다. 구체적으로, 제1 분석 유닛(311)은 기 촬영된 사육장 내 배경의 영상 데이터에서 전경에 해당하는 개체의 에지를 검출하고, 영상 데이터에서 검출된 전경 개체의 에지를 적용하고, 전경 개체의 에지가 적용된 영상 데이터의 영역에 개체 검출 분류기를 적용하여 가축을 검출할 수 있다.In another embodiment, the first analysis unit 311 may detect livestock from the image data using the object detection classifier. In this case, the object detection classifier is trained by constructing a training DB from livestock images taken by changing the posture or the external environment of the animal. The object detection classifier uses a support vector machine (SVM), a neural network, an AdaBoost algorithm, and the like. A comparison DB of livestock is generated through various learning algorithms. In detail, the first analysis unit 311 detects an edge of the object corresponding to the foreground from the image data of the background in the previously photographed kennel, applies an edge of the foreground object detected from the image data, Livestock can be detected by applying the object detection classifier to the area of the applied image data.
다음으로, 동작 데이터를 생성하는 과정을 구체적으로 살펴본다. 영상 분석부(310)에 포함된 제2 분석 유닛(312)은 영상 데이터를 이용하여 가축의 움직임을 나타내는 동작 데이터를 생성할 수 있다. 즉, 제2 분석 유닛(312)은 개체의 활동량을 계산하는 활동량 예측 알고리즘에 영상 데이터를 입력하여 동작 데이터를 생성할 수 있다. 구체적으로, 제2 분석 유닛(312)은 영상 데이터의 픽셀에 대한 모션 벡터를 연산하고, 모션 벡터에 기초하여 복수 영역별 개체의 활동량을 계산하여 동작 데이터를 생성할 수 있다. Next, a process of generating motion data will be described in detail. The second analysis unit 312 included in the image analyzer 310 may generate motion data indicating the movement of the livestock using the image data. That is, the second analysis unit 312 may generate motion data by inputting image data into an activity prediction algorithm that calculates the activity of the individual. In detail, the second analysis unit 312 may generate motion data by calculating a motion vector for a pixel of the image data and calculating an activity amount of the object for each of the plurality of regions based on the motion vector.
일 실시예로, 제2 분석 유닛(312)은 Dense Optical Flow방식을 이용하여 동작 개체의 움직임을 검출할 수 있다. 제2 분석 유닛(312)은 영상 데이터상의 모든 픽셀에 대해서 모션 벡터(Motion Vector)를 연산하여 각 픽셀에 대한 움직임을 검출할 수 있다. Dense Optical Flow방식의 경우 모든 픽셀에 대하여 모션 벡터를 연산하기 때문에 검출 정확도는 향상되지만 상대적으로 연산량은 증가하게 된다. 따라서, Dense Optical Flow방식은 이상상황이 발생된 것으로 의심되는 사육장이나 개체 숫자가 매우 많은 사육장 등 검출 정확도가 매우 높게 요구되는 특정 영역에 적용될 수 있다.In one embodiment, the second analysis unit 312 may detect the movement of the moving object using the Dense Optical Flow method. The second analysis unit 312 may calculate a motion vector for all the pixels on the image data to detect a motion for each pixel. In the case of the Dense Optical Flow method, since the motion vector is calculated for all pixels, the detection accuracy is improved, but the amount of computation is relatively increased. Therefore, the Dense Optical Flow method can be applied to a specific area where detection accuracy is very high, such as a kennel where an abnormal situation is suspected or a kennel with a large number of individuals.
다른 실시예로, 제2 분석 유닛(312)은 Sparse Optical Flow방식을 이용하여 동작 개체의 움직임을 검출할 수 있다. 제2 분석 유닛(312)은 영상 내 에지와 같은 움직임 추적이 쉬운 특징적인 일부 픽셀에 대해서만 모션 벡터를 연산하여 움직임을 검출할 수 있다. Sparse Optical Flow방식은 연산량이 감소하지만 한정적인 픽셀에 대한 결과만 얻을 수 있다. 따라서, Sparse Optical Flow방식은 개체 숫자가 적은 사육장 또는 개체가 중복되어 나타나지 않는 특정 영역에 적용될 수 있다.In another embodiment, the second analysis unit 312 may detect the movement of the moving object using a sparse optical flow method. The second analysis unit 312 may detect a motion by calculating a motion vector only for some of the characteristic pixels that are easy to track, such as edges in the image. The sparse optical flow method reduces the amount of computation, but only results for a limited number of pixels. Therefore, the sparse optical flow method may be applied to a kennel having a small number of individuals or to a specific area where the objects do not overlap.
다른 실시예로, 제2 분석 유닛(312)은 Block Matching을 이용하여 동작 개체의 움직임을 검출할 수 있다. 제2 분석 유닛(312)은 영상을 균등하게 또는 비균등하게 분할하여 분할 영역에 대해 모션 벡터를 연산하여 움직임을 검출할 수 있다. Block Matching은 분할 영역별로 모션 벡터를 연산하기 때문에 연산량이 감소하지만 영역별 모션 벡터에 대한 결과를 산출하기 때문에 검출 정확도가 상대적으로 낮을 수 있다. 따라서, Block Matching방식은 개체 숫자가 적은 사육장 또는 개체가 중복되어 나타나지 않는 특정 영역에 적용될 수 있다.In another embodiment, the second analyzing unit 312 may detect movement of the moving object using block matching. The second analysis unit 312 may divide the image evenly or unequally, calculate a motion vector with respect to the divided region, and detect a motion. Block Matching reduces the amount of computation because it calculates the motion vector for each partition, but it can have a relatively low detection accuracy because it calculates the results for the motion vector for each region. Accordingly, the block matching method may be applied to a kennel with a small number of individuals or to a specific area where the objects do not overlap.
다른 실시예로, 제2 분석 유닛(312)은 Continuous Frame Difference방식을 이용하여 동작 개체의 움직임을 검출할 수 있다. 제2 분석 유닛(312)은 연속하는 영상 프레임을 픽셀 별로 비교하고, 그 차이만큼의 값을 연산하여 움직임을 검출할 수 있다. Continuous Frame Difference방식은 프레임간 차이값을 이용하여 움직임을 검출하기 때문에, 전체적인 연산량은 감소하지만 부피가 큰 개체 또는 중복되어 나타나는 개체에 대한 검출 정확도가 상대적으로 낮을 수 있다. 또한, Continuous Frame Difference방식은 배경 영상과 움직이지 않는 개체를 구분할 수 없어 정확도가 상대적으로 낮을 수 있다. 따라서, Continuous Frame Difference방식은 개체 숫자가 적은 사육장 또는 개체가 중복되어 나타나지 않는 특정 영역에 적용될 수 있다. In another embodiment, the second analysis unit 312 may detect the movement of the moving object by using a continuous frame difference method. The second analyzing unit 312 may compare successive image frames for each pixel and calculate a value corresponding to the difference to detect motion. Since the Continuous Frame Difference method detects motion by using the difference between frames, the overall computational amount is reduced, but the detection accuracy of a large object or a duplicate object may be relatively low. In addition, the Continuous Frame Difference method can not distinguish between the background image and the moving object may have a relatively low accuracy. Therefore, the Continuous Frame Difference method may be applied to a kennel with a small number of objects or to a specific area where the objects do not overlap.
다른 실시예로, 제2 분석 유닛(312)은 Background Subtraction방식을 이용하여 동작 개체의 움직임을 검출할 수 있다. 제2 분석 유닛(312)은 배경 영상을 초기에 학습한 상태에서 연속하는 영상 프레임을 픽셀 별로 비교하고, 그 차이만큼의 값을 연산하여 움직임을 검출할 수 있다. Background Subtraction방식은 배경 영상을 미리 학습하고 있기 때문에 배경 영상과 움직이지 않는 개체를 구분할 수 있다. 따라서, 배경 영상을 필터링하는 별도의 과정이 필요하여 연산량은 증가하지만 정확도는 향상된다. 따라서, Background Subtraction방식은 이상상황이 발생된 것으로 의심되는 사육장이나 개체 숫자가 매우 많은 사육장 등 검출 정확도가 매우 높게 요구되는 특정 영역에 적용될 수 있다. Background Subtraction방식에서 배경 영상은 지속적으로 업데이트 될 수 있다.In another embodiment, the second analysis unit 312 may detect the movement of the moving object by using a background subtraction method. The second analysis unit 312 may detect the motion by comparing successive image frames for each pixel in a state where the background image is initially learned, and calculating a value corresponding to the difference. The background subtraction method is to learn the background image in advance so that the background image can be distinguished from the moving object. Therefore, a separate process of filtering the background image is required, thereby increasing the amount of computation but improving the accuracy. Therefore, the background subtraction method can be applied to a specific area where detection accuracy is very high, such as a kennel suspected of an abnormal situation or a kennel with a large number of individuals. In the Background Subtraction method, the background image can be updated continuously.
다음으로, 환경 파라미터 추정부(320)는 기계학습 기반의 최적 환경 추정 알고리즘을 포함하며, 최적 환경 추정 알고리즘을 이용하여 최적 환경 파라미터를 산출한다. 구체적으로, 환경 파라미터 추정부(320)는 행동 성향 데이터와 사육장의 환경 데이터를 기계학습 기반의 최적 환경 추정 알고리즘에 적용하여 가축의 성장에 최적화된 최적 환경 파라미터를 추정한다. Next, the environment parameter estimator 320 includes a machine learning based optimal environment estimation algorithm, and calculates an optimal environment parameter using the optimal environment estimation algorithm. In detail, the environmental parameter estimator 320 estimates an optimal environmental parameter optimized for livestock growth by applying behavioral propensity data and environment data of a kennel to an optimal environment estimation algorithm based on machine learning.
여기서, 환경 데이터는 모이 제공량, 모이 섭취량, 월령, 가축 증체량, 사육장의 온도, 습도, 이산화탄소량, 외부 기온 중 적어도 하나를 포함할 수 있다. 이 중 사육장의 온도, 습도, 이산화탄소량은 센싱 장치로부터 수신할 수 있으며, 모이 제공량, 모이 섭취량, 가축 증체량은 사용자로부터 입력될 수 있다. 월령 및 외부 기온은 기상청 서버와 같은 외부 서버로부터 수신할 수 있다. Here, the environmental data may include at least one of the amount of feed provided, feed intake, age, livestock weight, temperature, humidity, carbon dioxide amount, outside temperature of the kennel. Among them, the temperature, humidity, and carbon dioxide amount of the kennel may be received from the sensing device, and the amount of feed provided, the amount of feed intake, and the amount of livestock gain may be input from the user. The moon age and the outside temperature can be received from an external server such as the Meteorological Agency server.
그리고, 환경 파라미터 추정부(320)는 환경 데이터에 기반한 추천 환경 파라미터와 최적 환경 파라미터 중 적어도 하나에 기초하여 최종 환경 파라미터를 산출할 수 있다. 환경 파라미터 추정부(320)는 추천 환경 파라미터에 따라 공조 장치를 제어할 경우, 사육장 환경이 악화될지 여부를 판단하여 최종 환경 파라미터 산출 시 추천 환경 파라미터를 고려할지 여부를 판단한다. 추천 환경 파라미터에 따를 경우 사육장 환경이 악화된다고 판단되면, 환경 파라미터 추정부(320)는 최적 환경 파라미터를 최종 환경 파라미터로 결정한다. 반면, 추천 환경 파라미터에 따를 경우 사육장 환경이 악화되지 않는다고 판단되면, 환경 파라미터 추정부(320)는 최적 환경 파라미터와 추천 환경 파라미터를 고려하여 최종 환경 파라미터를 산출한다. The environment parameter estimator 320 may calculate the final environment parameter based on at least one of the recommended environment parameter and the optimal environment parameter based on the environment data. When controlling the air conditioning apparatus according to the recommended environmental parameters, the environmental parameter estimating unit 320 determines whether the environment of the kennel deteriorates and determines whether to consider the recommended environmental parameters when calculating the final environmental parameters. If it is determined that the environment of the kennel deteriorates according to the recommended environmental parameter, the environmental parameter estimator 320 determines the optimum environmental parameter as the final environmental parameter. On the other hand, if it is determined that the environment does not deteriorate according to the recommended environmental parameters, the environmental parameter estimator 320 calculates the final environmental parameters in consideration of the optimal environmental parameters and the recommended environmental parameters.
그리고, 최적 환경 파라미터는 사육장의 최적 온도, 최적 습도, 최적 급이량 및 최적 급수량 중 적어도 하나를 포함할 수 있다. 추천 환경 파라미터는 사육장의 추천 온도, 추천 습도, 추천 급이량 및 추천 급수량 중 적어도 하나를 포함한다. 최종 환경 파라미터는 사육장의 최종 온도, 최종 습도, 최종 급이량 및 최종 급수량 중 적어도 하나를 포함한다.The optimum environmental parameter may include at least one of an optimum temperature, an optimum humidity, an optimum feeding amount, and an optimum water supply amount of the kennel. The recommended environment parameter includes at least one of the recommended temperature, recommended humidity, recommended feeding amount and recommended water supply amount of the kennel. The final environmental parameter includes at least one of the final temperature, final humidity, final feed amount and final feed amount of the kennel.
환경 파라미터 추정부(320)는 행동 성향 데이터와 환경 데이터를 조합하여 훈련 데이터셋(training data set)을 생성하고, 훈련 데이터셋을 이용하여 최적 환경 추정 알고리즘을 학습시킬 수 있다. 이때, 훈련 데이터셋은 환경 파라미터 추정부(320)에 포함된 훈련 데이터 생성 알고리즘이 행동 성향 데이터와 환경 데이터를 조합함으로써 생성될 수 있다. 환경 파라미터 추정부(320)는 모이 제공량, 모이 섭취량, 월령, 가축 증체량, 사육장의 온도, 습도, 이산화탄소량, 외부 기온 중 적어도 하나와 위치 분포 데이터 및 동작 데이터 중 적어도 하나의 상관성에 기초하여 훈련 데이터셋을 생성할 수 있다. The environmental parameter estimator 320 may generate a training data set by combining behavioral propensity data and environmental data, and may learn an optimal environmental estimation algorithm using the training data set. In this case, the training data set may be generated by combining a training data generation algorithm included in the environment parameter estimator 320 with behavioral propensity data and environmental data. The environmental parameter estimator 320 may include training data based on a correlation between at least one of feed supply, feed intake, age, livestock weight, temperature, humidity, carbon dioxide, and external temperature of the kennel and at least one of location distribution data and motion data. You can create a set.
환경 파라미터 추정부(320)는 행동 성향 데이터 및 환경 데이터에 대한 신뢰도를 판단하고, 판단된 신뢰도에 따라 사용자에게 경보 신호를 송출할 수 있다. 구체적으로, 환경 파라미터 추정부(320)는 행동 성향 데이터 및 환경 데이터와 각각에 대응하는 신뢰 범위에 기초하여 데이터 신뢰도를 산출하고, 데이터 신뢰도가 기 설정된 임계값보다 작은 행동 성향 데이터 및 환경 데이터에 대한 경보 신호를 생성할 수 있다. 경보 신호에 대응하여 사용자가 행동 성향 데이터 및 환경 데이터에 대한 판단 결과를 입력하면, 환경 파라미터 추정부(320)는 경보 신호에 대한 사용자의 판단 결과를 저장하고, 경보 신호에 대응하는 행동 성향 데이터 및 환경 데이터가 입력되면 저장된 사용자의 판단 결과를 이용하여 데이터 신뢰도를 산출할 수 있다. 예를 들어, 환경 파라미터 추정부(320)는 현재 시점으로부터 이전 1시간 동안의 사육장 온도에 대한 현재 온도의 표준 편차를 데이터 신뢰도로 산출할 수 있으며, 표준 편차가 임계값보다 높은 경우 현재 온도 데이터에 대한 경보 신호를 생성할 수 있다. 그러면, 사용자는 경보 신호에 대응하여 현재 온도의 오류 여부 또는 보정 온도를 입력할 수 있으며, 환경 파라미터 추정부(320)는 입력받은 정보를 저장할 수 있다. 차후 유사한 상황이 발생할 경우, 환경 파라미터 추정부(320)는 저장된 정보에 따라 데이터 신뢰도를 판단할 수 있다. The environmental parameter estimator 320 may determine the reliability of the behavioral propensity data and the environmental data, and may transmit an alarm signal to the user according to the determined reliability. In detail, the environmental parameter estimator 320 calculates data reliability based on the behavioral propensity data and the environmental data and the confidence range corresponding to each of the environmental parameter estimator 320, and the data reliability is smaller than the preset threshold. Alarm signals can be generated. In response to the alarm signal, when the user inputs the determination result on the behavior propensity data and the environment data, the environment parameter estimator 320 stores the determination result of the user on the alarm signal, and the behavior propensity data corresponding to the alarm signal; When the environment data is input, data reliability may be calculated using the stored user's determination result. For example, the environmental parameter estimator 320 may calculate, as data reliability, the standard deviation of the current temperature with respect to the kennel temperature for the previous hour from the current time point, and if the standard deviation is higher than the threshold, Can generate an alarm signal. Then, the user may input whether the current temperature is an error or a correction temperature in response to the alarm signal, and the environmental parameter estimator 320 may store the received information. If a similar situation occurs later, the environmental parameter estimator 320 may determine data reliability according to the stored information.
다음으로, 제2 통신부(330)는 촬상 장치, 공조 장치 중 적어도 하나와 데이터 통신을 수행할 수 있다. 예를 들면, 제2 통신부(330)는 무선랜(Wireless LAN: WLAN), 와이 파이(Wi-Fi), 와이브로(Wireless Broadband: Wibro), 와이맥스(World Interoperability for Microwave Access: Wimax), HSDPA(High Speed Downlink Packet Access), IEEE 802.16, 롱 텀 에볼루션(Long Term Evolution: LTE), 광대역 무선 이동 통신 서비스(Wireless Mobile Broadband Service: WMBS) 등의 원거리 통신 기술을 사용하여 데이터 통신을 수행할 수 있다.Next, the second communication unit 330 may perform data communication with at least one of the imaging apparatus and the air conditioning apparatus. For example, the second communication unit 330 may include a wireless LAN (WLAN), a Wi-Fi, a Wi-Fi, a WiMAX, a World Interoperability for Microwave Access (Wimax), and an HSDPA (High). Data communication may be performed using telecommunication technologies such as Speed Downlink Packet Access), IEEE 802.16, Long Term Evolution (LTE), and Wireless Mobile Broadband Service (WMBS).
또는 제2 통신부(330)는 블루투스, RFID(RadioFrequency Identification), 적외선 통신(Infrared Data Association: IrDA), UWB(Ultra WideBand), 지그비, 인접 자장 통신(NFC) 등이 포함될 수 있다. 또한, 유선 통신 기술로는, USB 통신, 이더넷(Ethernet), 시리얼 통신(serial communication), 광/동축 케이블 등의 근거리 통신 기술을 사용하여 데이터 통신을 수행할 수 있다.Alternatively, the second communication unit 330 may include Bluetooth, RadioFrequency Identification (RFID), Infrared Data Association (IrDA), Ultra WideBand (UWB), Zigbee, and Near Field Communication (NFC). In addition, as a wired communication technology, data communication may be performed using a short-range communication technology such as USB communication, Ethernet, serial communication, and optical / coaxial cable.
예를 들면, 제2 통신부(330)는 근거리 통신 기술을 사용하여 타 이상 개체 검출 장치와 데이터 통신을 수행하고, 원거리 통신 기술을 사용하여 사육장 환경 관리 단말(300)와 데이터 통신을 수행할 수 있다, 그러나 이에 한정되는 것은 아니고, 사육장의 제반 사항 등을 고려하여 다양한 통신 기술이 사용될 수 있다.For example, the second communication unit 330 may perform data communication with another abnormality object detecting apparatus using a short range communication technology, and may perform data communication with the kennel environment management terminal 300 using a long distance communication technology. However, the present invention is not limited thereto, and various communication technologies may be used in consideration of various matters of the kennel.
제2 통신부(330)는 촬영부에서 촬영한 영상 데이터를 사육장 환경 관리 단말(300)에게 전송할 수 있다. 제2 통신부(330)를 통하여 전송되는 영상 데이터는 인코딩부를 통하여 인코딩된 압축 데이터일 수 있다.The second communication unit 330 may transmit the image data photographed by the photographing unit to the kennel environment management terminal 300. The image data transmitted through the second communication unit 330 may be compressed data encoded through the encoding unit.
도 6a은 본 발명의 일 실시예에 따른 사육장 환경 관리 단말의 사육장 환경 관리 방법에 대한 순서도이다.6A is a flowchart illustrating a method for managing a kennel environment of a kennel environment management terminal according to an exemplary embodiment of the present invention.
우선, 영상 분석부는 사육장의 전경을 촬영한 영상 데이터 및 사육장의 환경 정보를 계측한 환경 데이터를 수신한다(S610). First, the image analyzer receives the image data photographing the foreground of the kennel and the environmental data measuring the environment information of the kennel (S610).
그리고, 영상 분석부는 영상 데이터로부터 사육장 내 가축의 위치 또는 움직임 중 적어도 하나를 검출하여 사육장 내 가축에 대한 행동 성향 데이터를 생성한다(S611). 행동 성향 데이터는 가축에 대한 위치 분포 데이터 및 동작 데이터 중 적어도 하나를 포함할 수 있다. The image analyzer detects at least one of the position or movement of the livestock in the kennel from the image data to generate behavioral propensity data for the livestock in the kennel (S611). Behavioral propensity data may include at least one of location distribution data and motion data for livestock.
그러면, 환경 파라미터 추정부는 행동 성향 데이터와 사육장의 환경 데이터를 기계학습 기반의 최적 환경 추정 알고리즘에 적용하여 가축의 성장에 최적화된 최적 환경 파라미터를 추정한다(S612). Then, the environmental parameter estimator estimates the optimal environmental parameters optimized for the growth of the livestock by applying the behavioral propensity data and the environment data of the kennel to the optimal environment estimation algorithm based on the machine learning (S612).
그리고, 환경 파라미터 추정부는 최적 환경 파라미터를 공조 장치로 전송한다(S613). The environment parameter estimator transmits the optimum environment parameter to the air conditioning apparatus (S613).
또한, 환경 파라미터 추정부는 행동 성향 데이터와 환경 데이터를 조합하여 훈련 데이터셋(training data set)을 생성한다(S614). 그리고 환경 파라미터 추정부는 훈련 데이터셋을 이용하여 최적 환경 추정 알고리즘을 학습시킨다(S615). In addition, the environmental parameter estimator generates a training data set by combining behavioral propensity data and environmental data (S614). The environment parameter estimator learns an optimal environment estimation algorithm using the training data set (S615).
도 6b는 본 발명의 다른 실시예에 따른 사육장 환경 관리 단말의 사육장 환경 관리 방법에 대한 순서도이다.6B is a flowchart illustrating a kennel environment management method of the kennel environment management terminal according to another embodiment of the present invention.
도 6a를 통해 설명한 구성에 대한 상세한 설명은 생략하도록 한다. 도 6b의 S620 내지 S622는 도 6a의 S610 내지 S612에 각각 대응한다. 도 6b의 S625 내지 S627은 도 6a의 S613 내지 S615에 각각 대응한다. Detailed description of the configuration described with reference to FIG. 6A will be omitted. S620 to S622 of FIG. 6B correspond to S610 to S612 of FIG. 6A, respectively. S625 to S627 in FIG. 6B correspond to S613 to S615 in FIG. 6A, respectively.
S620 내지 S622의 단계 후, 환경 파라미터 추정부는 행동 성향 데이터와 사육장의 환경 데이터를 기계학습 기반의 최적 환경 추정 알고리즘에 적용하여 가축의 성장에 최적화된 최적 환경 파라미터를 추정한다(S622). After the steps S620 to S622, the environmental parameter estimator estimates an optimal environmental parameter optimized for livestock growth by applying behavioral propensity data and environment data of the kennel to an optimal environment estimation algorithm based on the machine learning (S622).
그리고, 환경 파라미터 추정부는 환경 데이터에 기초하여 추천 환경 파라미터 적용 시 사육장 환경의 악화 여부를 판단한다(S623). The environment parameter estimator determines whether the environment of the kennel deteriorates when the recommended environment parameter is applied based on the environment data (S623).
그러면, 환경 파라미터 추정부는 사육장 환경의 악화 여부 판단 결과에 따라 최적 환경 파라미터 및 추천 환경 파라미터 중 적어도 하나에 기초하여 최종 환경 파라미터를 산출한다(S624). Then, the environmental parameter estimating unit calculates the final environmental parameter based on at least one of the optimal environmental parameter and the recommended environmental parameter according to the determination result of the deterioration of the kennel environment (S624).
그러면, S625 내지 S627 단계가 수행된다.Then, steps S625 to S627 are performed.
도 7a는 본 발명의 일 실시예에 따른 사육장 환경 관리 시스템의 사육장 환경 관리 방법에 대한 순서도이다. 7A is a flowchart illustrating a kennel environment management method of a kennel environment management system according to an exemplary embodiment of the present invention.
우선, 촬상 장치(100)는 사육장의 전경을 촬영하여 사육장 내 개체에 대한 정보가 포함된 영상 데이터를 생성한 후(S710), 영상 데이터를 사육장 환경 관리 단말(300)로 전송한다(S711). First, the imaging apparatus 100 photographs the foreground of the kennel to generate the image data including the information on the individual in the kennel (S710), and then transmits the image data to the kennel environment management terminal 300 (S711).
그리고, 센싱 장치(200)는 사육장의 환경을 계측하여 환경 데이터를 생성하고(S712), 환경 데이터를 사육장 환경 관리 단말(300)로 전송한다(S713).Then, the sensing device 200 measures the environment of the kennel to generate environment data (S712), and transmits the environment data to the kennel environment management terminal 300 (S713).
그러면, 사육장 환경 관리 단말(300)은 영상 데이터로부터 사육장 내 가축의 위치 또는 움직임 중 적어도 하나를 검출하여 사육장 내 가축에 대한 행동 성향 데이터를 생성한다(S714). 행동 성향 데이터는 가축에 대한 위치 분포 데이터 및 동작 데이터 중 적어도 하나를 포함할 수 있다. Then, the kennel environment management terminal 300 detects at least one of the position or movement of the livestock in the kennel from the image data to generate behavioral propensity data for the livestock in the kennel (S714). Behavioral propensity data may include at least one of location distribution data and motion data for livestock.
다음으로, 사육장 환경 관리 단말(300)은 행동 성향 데이터와 환경 데이터를 조합하여 훈련 데이터셋(training data set)을 생성한다(S715). 그리고, 사육장 환경 관리 단말(300)은 훈련 데이터셋을 이용하여 최적 환경 추정 알고리즘을 학습시킨다(S716). Next, the kennel environment management terminal 300 generates a training data set by combining behavioral propensity data and environmental data (S715). The kennel environment management terminal 300 learns an optimal environment estimation algorithm using the training data set (S716).
또한, 사육장 환경 관리 단말(300)은 행동 성향 데이터와 사육장의 환경 데이터를 기계학습 기반의 최적 환경 추정 알고리즘에 적용하여 가축의 성장에 최적화된 최적 환경 파라미터를 추정한다(S717). In addition, the kennel environment management terminal 300 estimates an optimal environment parameter optimized for livestock growth by applying behavioral propensity data and environment data of the kennel to an optimal environment estimation algorithm based on machine learning (S717).
그리고, 환경 파라미터 추정부는 최적 환경 파라미터를 공조 장치(400)로 전송한다(S718). The environmental parameter estimator transmits the optimum environmental parameter to the air conditioning apparatus 400 (S718).
그러면, 공조 장치(400)는 최적 환경 파라미터에 기초하여 사육장의 환경을 제어한다(S719). Then, the air conditioning apparatus 400 controls the environment of the kennel based on the optimum environmental parameters (S719).
도 7b는 본 발명의 다른 실시예에 따른 사육장 환경 관리 시스템의 사육장 환경 관리 방법에 대한 순서도이다. 7B is a flowchart illustrating a kennel environment management method of the kennel environment management system according to another embodiment of the present invention.
도 7a를 통해 설명한 구성에 대한 상세한 설명은 생략하도록 한다. 도 7b의 S720 내지 S727은 도 7a의 S710 내지 S717에 각각 대응한다. 도 7b의 S730 및 S731은 도 7a의 S718 및 S719에 각각 대응한다. Detailed description of the configuration described with reference to FIG. 7A will be omitted. S720 to S727 of FIG. 7B correspond to S710 to S717 of FIG. 7A, respectively. S730 and S731 of FIG. 7B correspond to S718 and S719 of FIG. 7A, respectively.
S720 내지 S727 단계 후, 사육장 환경 관리 단말(300)은 환경 데이터에 기초하여 추천 환경 파라미터 적용 시 사육장 환경의 악화 여부를 판단한다(S728). After the steps S720 to S727, the kennel environment management terminal 300 determines whether the kennel environment is deteriorated when the recommended environment parameter is applied based on the environment data (S728).
그러면, 사육장 환경 관리 단말(300)은 사육장 환경의 악화 여부 판단 결과에 따라 최적 환경 파라미터 및 추천 환경 파라미터 중 적어도 하나에 기초하여 최종 환경 파라미터를 산출한다(S729). Then, the kennel environment management terminal 300 calculates the final environment parameter based on at least one of the optimal environment parameter and the recommended environment parameter according to the determination result of the deterioration of the kennel environment (S729).
그러면, S730 및 S731 단계가 수행된다.Then, steps S730 and S731 are performed.
도 8은 본 발명의 실시예에 따른 기계학습 기반의 분포량 예측 알고리즘을 설명하기 위한 도면이다. 8 is a diagram for explaining a machine learning based distribution amount prediction algorithm according to an embodiment of the present invention.
여기서, 분포량 예측 알고리즘은 객체가 위치하는 영역의 밀도 정보를 표시하도록 설계된 딥러닝 알고리즘의 한 예이다. 분포량 예측 알고리즘은 컨볼루션 네트워크(convolution network) 기반 학습 머신에 원본 영상을 입력한 후, 그레이 스케일의 확률 맵으로 나타낸 밀도 영상을 출력하는 알고리즘일 수 있다. 이에 따르면, 닭장과 같이 유사한 모양을 가진 객체가 높은 밀도로 수용된 사육장 환경에서도 이상 객체 정보를 용이하게 추출할 수 있다. Here, the distribution prediction algorithm is an example of a deep learning algorithm designed to display density information of a region where an object is located. The distribution amount prediction algorithm may be an algorithm for inputting an original image to a convolution network-based learning machine and then outputting a density image represented by a gray scale probability map. According to this, abnormal object information can be easily extracted even in a kennel environment in which objects having a similar shape, such as a chicken house, are accommodated at high density.
도 8에서 도시된 바와 같이, 분포량 예측 알고리즘은 적어도 하나의 컨볼루션 네트워크(convolution network(layer))를 포함할 수 있다. As shown in FIG. 8, the distribution prediction algorithm may include at least one convolution network (layer).
컨볼루션 네트워크는 적어도 하나의 피쳐 맵(feature map(W))을 이용하여 영상의 특징점을 분류할 수 있다. The convolutional network may classify the feature points of the image using at least one feature map (W).
컨볼루션 네트워크는 적어도 하나의 풀러(pooler) 및/또는 액티베이터(activator)를 통해 분포량 예측 알고리즘의 성능을 개선할 수 있다.The convolutional network may improve the performance of the distribution prediction algorithm through at least one pooler and / or activator.
분포량 예측 알고리즘은 concatenator를 더 포함하며, concatenator는 적어도 하나의 컨볼루션 네트워크의 출력 결과를 연결하고(concatenate), 재배열하여 원본 영상의 특징점을 이용하여 객체의 밀도(분포) 정보를 출력할 수 있다.The distribution prediction algorithm further includes a concatenator, and the concatenator may concatenate and rearrange output results of at least one convolutional network to output density (distribution) information of an object by using feature points of the original image. .
사육장 환경 관리 단말은 원본 영상과 밀도 영상을 이용하여 분포량 예측 알고리즘을 학습시킬 수 있으며, 적어도 하나의 피쳐 맵(feature map(W))은 객체의 밀도 정보를 출력할 수 있도록 훈련(trained(tuned))될 수 있다. The kennel environment management terminal can learn the distribution prediction algorithm using the original image and the density image, and at least one feature map (W) is trained (tuned) to output the density information of the object. Can be
본 발명의 실시예에서, 밀도 영상은 원본 영상과 같거나 유사한 크기(Width x Highet)를 가지도록 분포량 예측 알고리즘이 구성되며, 각각의 픽셀(또는 블록)의 위치는 서로 대응되고, 밀도 영상의 픽셀의 값은 원본 영상의 대응 픽셀에 객체(예를들어 가금류)가 존재할 수 있는 확률을 나타낼 수 있다. 예를 들어, 원본 영상의 픽셀에 객체가 존재할 확률이 높을수록, 밀도 영상의 해당 픽셀의 값은 높은 값을 가질 수 있다.In an embodiment of the present invention, the density prediction algorithm is configured such that the density image has a size (Width x Highet) that is the same as or similar to the original image, and the positions of each pixel (or block) correspond to each other, and the pixels of the density image are The value of may represent the probability that an object (eg, poultry) may exist in a corresponding pixel of the original image. For example, the higher the probability that an object exists in a pixel of the original image, the higher the value of the pixel of the density image may be.
도 9a는 본 발명의 일 실시예에 따른 최적 환경 파라미터 산출에 따른 데이터 흐름도를 나타낸 개념도이다. 9A is a conceptual diagram illustrating a data flow according to calculation of an optimal environment parameter according to an embodiment of the present invention.
도 9에서는 최적 환경 추정 알고리즘을 통해 최적 환경 파라미터를 추정하는 과정을 중심으로 데이터의 흐름을 살펴보도록 한다. In FIG. 9, the flow of data will be described based on a process of estimating an optimal environment parameter through an optimal environment estimation algorithm.
우선, n번째 영상 데이터는 분포량 예측 알고리즘과 활동량 예측 알고리즘에 각각 입력되고, n-1번째 영상 데이터는 활동량 예측 알고리즘에 입력된다. 여기서, 영상 데이터는, W X H크기의 RGB데이터일 수 있으며, n번째 영상 데이터는 n번째 원본 데이터, n번째 원본 영상, n 번째 원본 영상 데이터 등과 혼용될 수 있다. First, the n th image data is input to the distribution amount prediction algorithm and the active amount prediction algorithm, respectively, and the n-1 th image data is input to the activity amount prediction algorithm. The image data may be RGB data having a W X H size, and the n th image data may be mixed with the n th original data, the n th original image, the n th original image data, and the like.
사육장 환경 관리 단말(300)의 영상 분석부(310), 예를 들어 제1 분석 유닛(311)은 n번째 영상 데이터에서 개체를 검출하여 n번째 영상 데이터에 대한 개체의 위치 분포 데이터를 생성한다. 여기서, 위치 분포 데이터는 영역 별, 블록 별, 또는 픽셀 별로 생성될 수 있으며, 영상 분석부(310)는 영상 데이터 내에서 객체가 위치한다고 판단되는 영역을 제안하도록 학습된 분포량 예측 알고리즘을 이용할 수 있다. 여기서, 분포량 예측 알고리즘은, 전술한 바와 같이 객체가 존재하는 영역을 표시하는 알고리즘을 활용한 실시간 객체 검출 방법을 이용할 수 있다, 또는, 분포량 예측 알고리즘은 객체의 분포 정보, 즉 객체가 위치하는 영역의 밀도 정보를 나타내는 방법을 이용할 수도 있다. 여기서, 위치 분포 데이터는 밀도 맵 일 수 있다. The image analyzer 310 of the kennel environment management terminal 300, for example, the first analysis unit 311, detects an object from the nth image data and generates position distribution data of the object with respect to the nth image data. Here, the position distribution data may be generated for each region, for each block, or for each pixel, and the image analyzer 310 may use a learned distribution prediction algorithm to suggest a region in which the object is located in the image data. . Here, the distribution amount prediction algorithm may use a real-time object detection method using an algorithm indicating an area where an object exists as described above, or the distribution amount prediction algorithm may use distribution information of an object, that is, an area of an area where an object is located. It is also possible to use a method of representing density information. Here, the position distribution data may be a density map.
사육장 환경 관리 단말(300)의 영상 분석부(310), 예를 들어 제2 분석 유닛(312)은 n-1번째 영상 데이터와 n번째 영상 데이터를 비교하여 n번째 영상 데이터에 대한 개체의 움직임을 검출한다. 이 때, n-1번째 영상 데이터는 래치회로 또는 버퍼회로에 저장되어 있을 수 있다. 사육장 환경 관리 단말(300)의 영상 분석부(310), 예를 들어 제2 분석 유닛(312)는 검출한 움직임에 따라 동작 데이터를 생성한다. 여기서, 동작 데이터는 동작 맵일 수 있다. 여기서, 동작 데이터는 영역 별, 블록 별 또는 픽셀 별로 생성될 수 있으며, 영상 분석부(310)는 옵티컬 플로우(optical flow)를 활용하여 모션을 검출하도록 학습된 활동량 예측 알고리즘을 이용할 수 있다. The image analyzing unit 310 of the kennel environment management terminal 300, for example, the second analysis unit 312 compares the n-1th image data and the nth image data to determine the movement of the object with respect to the nth image data. Detect. In this case, the n−1th image data may be stored in the latch circuit or the buffer circuit. The image analyzer 310, for example, the second analysis unit 312 of the farm environment management terminal 300 generates motion data according to the detected movement. Here, the motion data may be a motion map. Here, the motion data may be generated for each region, block, or pixel, and the image analyzer 310 may use an activity amount prediction algorithm trained to detect motion by using an optical flow.
그러면, 사육장 환경 관리 단말(300)은 n번째 위치 분포 데이터, n번째 동작 데이터 및 센서로부터 수신한 n번째 환경 데이터를 최적 환경 추정 알고리즘에 입력하여 최적 환경 파라미터를 추출한다. 최적 환경 파라미터는 공조 장치(400)로 전달되고 공조 장치는 최적 환경 파라미터를 이용하여 공조 장치(400)를 가동한다.Then, the kennel environment management terminal 300 inputs the n-th position distribution data, the n-th operation data and the n-th environment data received from the sensor to the optimum environment estimation algorithm to extract the optimal environment parameters. The optimum environmental parameters are transferred to the air conditioning apparatus 400, which operates the air conditioning apparatus 400 using the optimal environmental parameters.
한편, 사육장 환경 관리 단말(300)은 최적 환경 추정 알고리즘을 학습(training), 즉, 업데이트 시킬 수 있다. Meanwhile, the kennel environment management terminal 300 may train, that is, update the optimal environment estimation algorithm.
최적 환경 추정 알고리즘은 지도 학습(Supervised Learning) 기반의 기계학습 알고리즘, 비지도 학습(Unsupervised Learning) 기반의 기계학습 알고리즘 및 강화 학습(Reinforcement Learning) 기반의 기계학습 알고리즘 중 적어도 하나일 수 있다. The optimal environment estimation algorithm may be at least one of a supervised learning based machine learning algorithm, an unsupervised learning based machine learning algorithm, and a reinforcement learning based machine learning algorithm.
최적 환경 추정 알고리즘은 로지스틱 회귀법(logistic regression), k-최근린내삽법(k-nearest neighbor, KNN), 서포트 벡터 머신 (Support Vector Machine, SVM), 일반화 선형 모델(Generalized linear models, GLM), 의사결정 트리(Decision trees), 랜덤 포레스트(Random forests), 점진적 부스팅 머신(Gradient boosting machine, GBM), 딥 러닝(Deep learning), 컨벌루션 신경망(Convolutional Neural Network, CNNs), 순환 신경망(Recurrent Neural Networks, RNNs), 클러스터링(Clustering), 비정상 탐지(Anomaly detection), 차원 축소(Dimension reduction), 분포 추정(Underlying Probability Density Estimation), Autoencoders, 큐 러닝(Q-Learning), 딥 큐 네트워크(Deep-Q-Network, DQN), 나이브 베이즈 분류기(Naive Bayes Classifier, NBC), 은닉 마르코프 모델(Hidden Markov Model, HMM), 케이-민스 클러스터링(K-Means Clustering), K-최근접 이웃 알고리즘 (k-Nearest Neighbors, k-NN), 앙상블 학습(Ensemble Learning) 중 적어도 하나일 수 있다.Optimal environmental estimation algorithms include logistic regression, k-nearest neighbor (KNN), support vector machine (SVM), generalized linear models (GLM), and pseudo Decision trees, random forests, gradient boosting machines (GBMs), deep learning, convolutional neural networks (CNNs), recurrent neural networks (RNNs) ), Clustering, Anomaly detection, Dimension reduction, Underlying Probability Density Estimation, Autoencoders, Q-Learning, Deep-Q-Network, DQN), Naive Bayes Classifier (NBC), Hidden Markov Model (HMM), K-Means Clustering, K-Nearest Neighbors, k -NN), ensemble learning (Ens) emble learning).
구체적으로 본 발명의 실시예에 따른 사육장 환경 관리 단말(300)은 훈련 데이터 생성 알고리즘을 통해 동작 데이터, 위치 데이터 및 환경 데이터를 조합하여 훈련 데이터 셋을 생성할 수 있다. Specifically, the kennel environment management terminal 300 according to an embodiment of the present invention may generate a training data set by combining motion data, location data, and environmental data through a training data generation algorithm.
훈련 데이터 생성 알고리즘은 최적 환경 추정 알고리즘의 유형에 따라 훈련 데이터셋을 생성할 수 있다. The training data generation algorithm may generate the training dataset according to the type of the optimal environment estimation algorithm.
일 실시예에 따르면, 최적 환경 추정 알고리즘이 지도 학습 기반의 기계학습 알고리즘인 경우, 훈련 데이터 생성 알고리즘은 위치 분포 데이터 및 동작 데이터 중 적어도 하나에 환경 데이터를 라벨링(labeling)하여 훈련 데이터 셋을 생성할 수 있다. 훈련 데이터 생성 알고리즘은 환경 데이터에 위치 분포 데이터 및 동작 데이터 중 적어도 하나를 라벨링(labeling)하여 훈련 데이터 셋을 생성할 수도 있다. 예를 들어, 훈련 데이터 셋은 [Data(n번째 환경 데이터의 온도); Label(n번째 동작 데이터)]이나 [Data(n번째 동작 데이터, n번째 위치 분포 데이터); Label(n번째 환경 데이터의 온도, n번째 환경 데이터의 습도, n번째 환경 데이터의 CO2)]와 같은 형태일 수 있다. According to an embodiment, when the optimal environment estimation algorithm is a supervised learning-based machine learning algorithm, the training data generation algorithm may generate the training data set by labeling the environmental data in at least one of the position distribution data and the motion data. Can be. The training data generation algorithm may generate at least one of position distribution data and motion data in the environmental data to generate a training data set. For example, the training data set may be [Data (temperature of the nth environmental data); Label (nth motion data)] or [Data (nth motion data, nth position distribution data); Label (temperature of the nth environmental data, humidity of the nth environmental data, CO2 of the nth environmental data).
다른 실시예에 따르면, 최적 환경 추정 알고리즘이 비지도 학습 기반의 기계학습 알고리즘인 경우, 훈련 데이터 생성 알고리즘은 위치 분포 데이터, 동작 데이터 및 환경 데이터를 조합하여 훈련 데이터 셋을 생성할 수 있다. 예를 들어, 훈련 데이터 셋은 [Data(n번째 동작 데이터, n번째 위치 분포 데이터, n번째 환경 데이터의 온도, n번째 환경 데이터의 습도)]와 같은 형태일 수 있다. According to another embodiment, when the optimal environment estimation algorithm is an unsupervised learning-based machine learning algorithm, the training data generation algorithm may generate a training data set by combining location distribution data, motion data, and environment data. For example, the training data set may be in the form of [Data (n th motion data, n th position distribution data, n th environmental data temperature, n th environmental data humidity)].
다른 실시예에 따르면, 최적 환경 추정 알고리즘이 비지도 학습 기반의 기계학습 알고리즘인 경우, 훈련 데이터 생성 알고리즘은 위치 분포 데이터, 동작 데이터 및 환경 데이터를 조합하여 훈련 데이터 셋을 생성할 수 있다. 예를 들어, 훈련 데이터 셋은 [state(n번째 동작 데이터, n번째 위치 분포 데이터, n번째 환경 데이터의 온도, n번째 환경 데이터의 습도), action(n번째 최적 환경 파라미터의 제어 온도, n번째 최적 환경 파라미터의 제어 습도), reward(생산량, 모이 섭취량, 증체량)]와 같은 형태일 수 있다. 여기서, action(n번째 최적 환경 파라미터의 제어 온도, n번째 최적 환경 파라미터의 제어 습도)의 경우 최적 환경 파라미터의 값일 수 있으며, 공조 장치의 실제 제어값 일 수 있다.According to another embodiment, when the optimal environment estimation algorithm is an unsupervised learning-based machine learning algorithm, the training data generation algorithm may generate a training data set by combining location distribution data, motion data, and environment data. For example, the training data set is [state (nth motion data, nth position distribution data, nth environmental data temperature, nth environmental data humidity), action (nth optimal environmental parameter control temperature, nth Control humidity of the optimal environmental parameters), reward (production, feed intake, weight gain)]. In this case, the action (the control temperature of the n-th optimal environmental parameter, the control humidity of the n-th optimal environmental parameter) may be a value of the optimum environmental parameter, and may be an actual control value of the air conditioning apparatus.
그리고, 본 발명의 실시예에 따른 사육장 환경 관리 단말(300)은 훈련 데이터 셋을 이용하여 최적 환경 추정 알고리즘을 학습시킬 수 있다.In addition, the kennel environment management terminal 300 according to an embodiment of the present invention may learn an optimal environment estimation algorithm using a training data set.
예를 들어, 최적 환경 추정 알고리즘이 입력 레이어(input layer), 히든 레이어(hidden layer) 및 출력 레이어(output layer)로 구성된 신경망 회로라고 가정한다. For example, assume that the optimal environment estimation algorithm is a neural network circuit composed of an input layer, a hidden layer, and an output layer.
그러면, n번째 동작 데이터, n번째 위치 분포 데이터 및 n번째 온도 데이터가 입력 레이어의 3개 노드에 각각 입력된다. 각 입력 레이어의 노드는 n번째 동작 데이터, n번째 위치 분포 데이터 및 n번째 온도으로부터 특징 값을 추출할 수 있다. 예를 들어, n번째 동작 데이터의 전체 동작 벡터의 크기 값을 합산한 값을 특징 값으로 추출할 수 있으며, 이외에도 다양한 특징 값을 추출할 수 있다. Then, the n th operation data, the n th position distribution data, and the n th temperature data are input to three nodes of an input layer, respectively. The node of each input layer may extract feature values from the n th operation data, the n th position distribution data, and the n th temperature. For example, the sum of the magnitude values of the entire motion vectors of the n th motion data may be extracted as a feature value, and various feature values may be extracted.
각 특징값은 히든 레이어의 각 노드들로 입력되며, 히든 레이어의 각 노드들은 아래의 수학식 1과 에 입력되는 특징값에 각각에 대응하는 가중치(w)가 곱해진 값을 합산하고 이를 아래의 수학식 2와 같은 활성화 함수(Activation Function)인 시그모이드 함수(sigmoid fuction)에 적용하여 출력을 결정할 수 있다. Each feature value is input to each node of the hidden layer, and each node of the hidden layer adds the value multiplied by the corresponding weight (w) to the feature value input in Equation 1 and Equation 1 below and The output may be determined by applying to a sigmoid fuction, which is an activation function such as Equation 2.
[수학식 1][Equation 1]
w1은 n번째 동작 데이터에 대응한 가중치이고, x1은 n번째 동작 데이터의 특징값이고, w2은 n번째 위치 분포 데이터에 대응한 가중치이고, x2은 n번째 위치 분포 데이터의 특징값이고, w3은 n번째 환경 데이터에 대응한 가중치이고, x3은 n번째 환경 데이터의 특징값이다. w 1 is a weight corresponding to the n th motion data, x 1 is a feature value of the n th motion data, w 2 is a weight corresponding to the n th position distribution data, and x 2 is a feature value of the n th position distribution data , W 3 is a weight corresponding to the n th environmental data, and x 3 is a feature value of the n th environmental data.
[수학식 2][Equation 2]
입력 레이어와 연결된 제1 히든 레이어 이외의 히든 레이어들은 입력 노드에 따라 수학식 1이 변형되어 이용될 수 있다. The hidden layers other than the first hidden layer connected to the input layer may be modified by Equation 1 according to the input node.
그러면, 본 발명의 실시예에 따른 사육장 환경 관리 단말(300)은 출력 레이어를 통해 출력되는 값의 오차에 따라 각 노드에 설정된 가중치(w)를 조절한다. 이때, 가중치(w)의 조절은 역전파 기법(backpropagation)을 이용할 수 있다. Then, the kennel environment management terminal 300 according to the embodiment of the present invention adjusts the weight (w) set in each node according to the error of the value output through the output layer. In this case, the weight w may be adjusted using backpropagation.
도 9b는 본 발명의 다른 실시예에 따른 최적 환경 파라미터 산출에 따른 데이터 흐름도를 나타낸 개념도이다. 9B is a conceptual diagram illustrating a data flow according to calculation of an optimal environment parameter according to another embodiment of the present invention.
도 9b는 도 9a에서 설명한 구성을 모두 포함할 수 있으며, 아래에서 설명하는 내용을 더 포함할 수 있다. FIG. 9B may include all of the configurations described with reference to FIG. 9A, and may further include contents described below.
최종 환경 추정 알고리즘은 최적 환경 파라미터 및 추천 환경 파라미터 중 적어도 하나에 기초하여 최종 환경 파라미터를 생성한다. The final environment estimation algorithm generates a final environment parameter based on at least one of the optimal environment parameter and the recommended environment parameter.
우선, 최종 환경 추정 알고리즘은 최종 환경 파라미터 산출 시, 최적 환경 파라미터만을 고려할 지 추천 환경 파라미터 최적 환경 파라미터 및 추천 환경 파라미터를 함께 고려할지를 결정하기 위하여, 추천 환경 파라미터의 적정성 여부를 판단한다. 최종 환경 추정 알고리즘은 사육장에 대한 환경 데이터와 추천 환경 파라미터를 비교하여 추천 환경 파라미터에 따라 사육장 환경을 제어할 경우 생산성이 악화되는지 여부를 판단한다. 일 실시예로, 환경 데이터의 값과 추천 환경 파라미터의 값의 차이값이 임계 범위를 초과하는 경우, 최종 환경 추정 알고리즘은 추천 환경 파라미터 적용시 사육장 환경이 악화된다고 판단할 수 있다. 예를 들어, 온도에 대한 임계범위가 -5도에서 5도 사이로 설정되어 있는데, 환경 데이터의 현재 온도와 사육장 추천 환경 파라미터의 추천 온도 간 차이값이 10도인 경우 최종 환경 추정 알고리즘은 해당 추천 환경 파라미터 적용시 사육장 환경이 악화된다고 판단할 수 있다. First, the final environment estimation algorithm determines whether the recommended environment parameter is appropriate in order to determine whether to consider only the optimal environment parameter or the recommended environment parameter and the recommended environment parameter together when calculating the final environment parameter. The final environment estimation algorithm compares the environment data for the kennel with the recommended environment parameter to determine whether productivity is deteriorated when the environment is controlled according to the recommended environment parameter. In one embodiment, when the difference value between the value of the environmental data and the value of the recommended environment parameter exceeds the threshold range, the final environment estimation algorithm may determine that the kennel environment is deteriorated when the recommended environment parameter is applied. For example, if the critical range for temperature is set between -5 and 5 degrees, and the difference between the current temperature in the environmental data and the recommended temperature in the kennel recommended environmental parameter is 10 degrees, then the final environmental estimation algorithm will determine the recommended environmental parameter. It can be judged that the application environment deteriorates when applied.
추천 환경 파라미터 적용시 사육장 환경이 악화된다고 판단되면, 최종 환경 추정 알고리즘은 추천 환경 파라미터를 고려하지 않고 최적 환경 파라미터를 최종 환경 파라미터로 결정한다. If it is determined that the environment of the kennel deteriorates when the recommended environment parameter is applied, the final environment estimation algorithm determines the optimal environment parameter as the final environment parameter without considering the recommended environment parameter.
반면, 추천 환경 파라미터 적용시 사육장 환경이 악화되지 않는다고 판단되면, 최종 환경 추정 알고리즘은 추천 환경 파라미터를 고려하지 않고 최적 환경 파라미터를 최종 환경 파라미터로 결정한다. 일 실시예로, 최종 환경 추정 알고리즘은 추천 환경 파라미터와 최적 환경 파라미터의 평균값을 최종 환경 파라미터로 산출할 수 있다. 다른 실시예로, 최종 환경 추정 알고리즘은 추천 환경 파라미터에 기 설정된 가중치를 부가하여 오프셋(offset) 값을 생성하고, 최적 환경 파라미터에 오프셋(offset) 값을 가산 또는 감산하여 최종 환경 파라미터를 산출할 수 있다. On the other hand, if it is determined that the environment of the kennel does not deteriorate when the recommended environment parameter is applied, the final environment estimation algorithm determines the optimum environment parameter as the final environment parameter without considering the recommended environment parameter. In an embodiment, the final environment estimation algorithm may calculate an average value of the recommended environment parameter and the optimal environment parameter as the final environment parameter. In another embodiment, the final environment estimation algorithm may generate an offset value by adding a preset weight to the recommended environment parameter, and calculate or add a final value to the optimum environment parameter by adding or subtracting the offset value. have.
한편, 학습 서버(400)에 포함된 추천 환경 추정 알고리즘은 날짜, 지역 및 장소 중 적어도 하나를 카테고리로 설정하고, 카테고리 별로 제2 훈련 데이터셋을 이용하여 학습시킬 수 있다. 예를 들어, 추천 환경 추정 알고리즘은 <강원도 철원군, 4월>이라는 카테고리를 가질 수 있다. 이때, 제2 훈련 데이터셋 조합에 이용된 환경 데이터가 생성된 사육장의 지역이 강원도 철원군이고, 날짜가 4월 15일인 경우, 제2 훈련 데이터셋은 <강원도 철원군, 4월>이라는 카테고리에서 추천 환경 추정 알고리즘에 이용된다. Meanwhile, the recommended environment estimation algorithm included in the learning server 400 may set at least one of a date, a region, and a place as a category, and learn by using the second training data set for each category. For example, the recommended environment estimation algorithm may have a category of <Gangwon-do Cheorwon-gun, April>. At this time, if the area of the kennel where the environmental data used for the second training data set is generated is Cheorwon-gun, Gangwon-do, and the date is April 15, the second training dataset is the recommended environment in the category <Gewon, Cheorwon-gun, April>. Used in the estimation algorithm.
제2 훈련 데이터셋은 기계학습 기반의 추천 환경 추정 알고리즘을 학습시키는데 이용된다. 그리고, 추천 환경 추정 알고리즘은 현재 날짜, 사육장이 위치한 지역 및 장소 중 적어도 하나에 따라 추천 환경 파라미터를 생성할 수 있다. 일 실시예로, 10월의 경상도 김해시의 해안지역에 있는 사육장에 대한 추천 환경 파라미터를 생성하는 경우, 추천 환경 추정 알고리즘은 <경상도 김해시, 해안, 가을>이라는 카테고리 내에서 추천 환경 파라미터를 생성할 수 있다. The second training dataset is used to train the machine learning based recommended environment estimation algorithm. The recommendation environment estimation algorithm may generate a recommendation environment parameter according to at least one of a current date, a region, and a place where the kennel is located. As an example, when generating recommended environment parameters for a kennel in a coastal area of Gimhae, Gyeongsang-do, October, the recommended environment estimation algorithm may generate recommended environment parameters within a category of <Gyeongsang-do, Gimhae, coast, autumn>. have.
추천 환경 추정 알고리즘은 일정 주기마다 추천 환경 파라미터를 사육장 환경 관리 단말로 전송하거나, 전송 요청이 있는 경우 추천 환경 파라미터를 사육장 환경 관리 단말로 전송할 수 있다. 추천 환경 추정 알고리즘의 종류 및 학습 과정은 훈련 데이터 셋에 포함된 정보만 상이할 뿐 최적 환경 추정 알고리즘의 종류와 동일한 바, 상세한 설명은 생략하도록 한다.The recommended environment estimation algorithm may transmit the recommended environment parameter to the kennel environment management terminal at regular intervals or, if there is a request for transmission, the recommended environment parameter to the kennel environment management terminal. Since the type and learning process of the recommended environment estimation algorithm differ only from the information included in the training data set, the detailed environment description is omitted.
본 실시예에서 사용되는 '~부'라는 용어는 소프트웨어 또는 FPGA(field-programmable gate array) 또는 ASIC과 같은 하드웨어 구성요소를 의미하며, '~부'는 어떤 역할들을 수행한다. 그렇지만 '~부'는 소프트웨어 또는 하드웨어에 한정되는 의미는 아니다. '~부'는 어드레싱할 수 있는 저장 매체에 있도록 구성될 수도 있고 하나 또는 그 이상의 프로세서들을 재생시키도록 구성될 수도 있다. 따라서, 일 예로서 '~부'는 소프트웨어 구성요소들, 객체지향 소프트웨어 구성요소들, 클래스 구성요소들 및 태스크 구성요소들과 같은 구성요소들과, 프로세스들, 함수들, 속성들, 프로시저들, 서브루틴들, 프로그램 코드의 세그먼트들, 드라이버들, 펌웨어, 마이크로코드, 회로, 데이터, 데이터베이스, 데이터 구조들, 테이블들, 어레이들, 및 변수들을 포함한다. 구성요소들과 '~부'들 안에서 제공되는 기능은 더 작은 수의 구성요소들 및 '~부'들로 결합되거나 추가적인 구성요소들과 '~부'들로 더 분리될 수 있다. 뿐만 아니라, 구성요소들 및 '~부'들은 디바이스 또는 보안 멀티미디어카드 내의 하나 또는 그 이상의 CPU들을 재생시키도록 구현될 수도 있다.The term '~ part' used in the present embodiment refers to software or a hardware component such as a field-programmable gate array (FPGA) or an ASIC, and '~ part' performs certain roles. However, '~' is not meant to be limited to software or hardware. '~ Portion' may be configured to be in an addressable storage medium or may be configured to play one or more processors. Thus, as an example, '~' means components such as software components, object-oriented software components, class components, and task components, and processes, functions, properties, procedures, and the like. Subroutines, segments of program code, drivers, firmware, microcode, circuits, data, databases, data structures, tables, arrays, and variables. The functionality provided within the components and the 'parts' may be combined into a smaller number of components and the 'parts' or further separated into additional components and the 'parts'. In addition, the components and '~' may be implemented to play one or more CPUs in the device or secure multimedia card.
이상에서 실시예를 중심으로 설명하였으나 이는 단지 예시일 뿐 본 발명을 한정하는 것이 아니며, 본 발명이 속하는 분야의 통상의 지식을 가진 자라면 본 실시예의 본질적인 특성을 벗어나지 않는 범위에서 이상에 예시되지 않은 여러 가지의 변형과 응용이 가능함을 알 수 있을 것이다. 예를 들어, 실시예에 구체적으로 나타난 각 구성 요소는 변형하여 실시할 수 있는 것이다. 그리고 이러한 변형과 응용에 관계된 차이점들은 첨부된 청구 범위에서 규정하는 본 발명의 범위에 포함되는 것으로 해석되어야 할 것이다. Although the above description has been made based on the embodiments, these are merely examples and are not intended to limit the present invention. Those skilled in the art to which the present invention pertains may not have been exemplified above without departing from the essential characteristics of the present embodiments. It will be appreciated that many variations and applications are possible. For example, each component specifically shown in the embodiment can be modified. And differences relating to such modifications and applications will have to be construed as being included in the scope of the invention defined in the appended claims.
Claims (10)
- 개체에 대한 정보가 포함된 영상 데이터로부터 사육장 내 동작 개체의 위치 또는 움직임 중 적어도 하나를 검출하여 상기 동작 개체에 대한 위치 분포 데이터 및 동작 데이터 중 적어도 하나를 포함하는 행동 성향 데이터를 생성하는 영상 분석부, 그리고 An image analyzer which detects at least one of the position or movement of the moving object in the kennel from the image data including the information on the object and generates behavior tendency data including at least one of position distribution data and motion data of the moving object. , And상기 행동 성향 데이터와 상기 사육장의 환경 데이터를 기계학습 기반의 최적 환경 추정 알고리즘에 적용하여 상기 동작 개체의 성장에 최적화된 최적 환경 파라미터를 추정하는 환경 파라미터 추정부를 포함하는 사육장 환경 관리 단말. And an environment parameter estimator for estimating an optimal environment parameter optimized for growth of the moving object by applying the behavioral propensity data and the environment data of the kennel to an optimal environment estimation algorithm based on a machine learning.
- 제1항에 있어서,The method of claim 1,상기 영상 분석부는, The image analyzer,상기 영상 데이터를 복수 영역으로 구분하고, 상기 복수 영역별로 상기 동작 개체의 활동량 및 분포량 중 적어도 하나를 계산하여 상기 행동 성향 데이터를 생성하는 사육장 환경 관리 단말. And dividing the image data into a plurality of areas, and calculating at least one of an activity amount and a distribution amount of the moving object for each of the plurality of areas to generate the behavior tendency data.
- 제2항에 있어서,The method of claim 2,상기 영상 분석부는, The image analyzer,상기 영상 데이터로부터 상기 개체의 에지를 검출하고, 검출된 상기 개체의 에지와 기 저장된 비교 데이터 베이스(Data Base)에 기초하여 상기 복수 영역별 개체의 분포도를 계산하여 상기 위치 분포 데이터를 생성하는 제1 분석 유닛을 포함하는 사육장 환경 관리 단말. Detecting the edge of the object from the image data, and calculating the distribution of the object for each of the plurality of regions based on the detected edge and the previously stored comparison database to generate the position distribution data. Farm environment management terminal comprising an analysis unit.
- 제2항에 있어서,The method of claim 2,상기 영상 분석부는, The image analyzer,상기 영상 데이터의 픽셀에 대한 모션 벡터를 연산하고, 상기 모션 벡터에 기초하여 상기 복수 영역별 개체의 활동성을 계산하여 상기 동작 데이터를 생성하는 제2 분석 유닛을 포함하는 사육장 환경 관리 단말. And a second analysis unit configured to calculate a motion vector for the pixel of the image data, calculate activity of the object for each of the plurality of regions based on the motion vector, and generate the motion data.
- 제1항에 있어서,The method of claim 1,상기 환경 파라미터 추정부는, The environmental parameter estimator,상기 행동 성향 데이터와 상기 환경 데이터를 조합하여 훈련 데이터셋(training data set)을 생성하고, 상기 훈련 데이터셋을 이용하여 상기 최적 환경 추정 알고리즘을 학습시키며, Generating a training data set by combining the behavioral propensity data and the environment data, and learning the optimal environment estimation algorithm using the training data set,상기 환경 데이터는, The environmental data,모이 제공량, 모이 섭취량, 월령, 동작 개체 증체량, 상기 사육장의 온도, 습도, 이산화탄소량, 외부 기온 중 적어도 하나를 포함하고, At least one of the amount of feed, feed intake, age, moving object weight, temperature, humidity, carbon dioxide, outside temperature of the kennel,상기 환경 파라미터 추정부는, The environmental parameter estimator,상기 모이 제공량, 모이 섭취량, 월령, 동작 개체 증체량, 상기 사육장의 온도, 습도, 이산화탄소량, 외부 기온 중 적어도 하나와 상기 위치 분포 데이터 및 동작 데이터 중 적어도 하나의 상관성에 기초하여 상기 훈련 데이터셋을 생성하는 사육장 환경 관리 단말. Generate the training dataset based on a correlation between at least one of the feeding amount, feeding intake, age, moving object gain, temperature, humidity, carbon dioxide, and external temperature of the kennel and at least one of the location distribution data and the motion data. Farm environment management terminal to say.
- 제1항에 있어서, The method of claim 1,상기 환경 파라미터 추정부는, The environmental parameter estimator,상기 행동 성향 데이터 및 환경 데이터와 각각에 대응하는 신뢰 범위에 기초하여 데이터 신뢰도를 산출하고, 상기 데이터 신뢰도와 기 설정된 임계값을 비교한 결과에 따라 상기 행동 성향 데이터 및 환경 데이터에 대한 경보 신호를 생성하며, Computing data reliability based on the behavior propensity data and environmental data and a confidence range corresponding to each, and generating an alarm signal for the behavior propensity data and environmental data according to a result of comparing the data reliability with a predetermined threshold value. ,상기 경보 신호에 대한 사용자의 판단 결과를 저장하고, 상기 경보 신호에 대응하는 상기 행동 성향 데이터 및 환경 데이터가 입력되면 저장된 상기 사용자의 판단 결과를 이용하여 상기 데이터 신뢰도를 산출하는 사육장 환경 관리 단말. A storage environment management terminal for storing the determination result of the user for the alarm signal and calculating the data reliability using the stored determination result of the user when the behavior tendency data and the environment data corresponding to the alarm signal are input.
- 제1항에 있어서, The method of claim 1,상기 환경 파라미터 추정부는, The environmental parameter estimator,상기 환경 데이터에 기반한 추천 환경 파라미터와 상기 최적 환경 파라미터 중 적어도 하나에 기초하여 최종 환경 파라미터를 산출하는 사육장 환경 관리 단말. And a kennel environment management terminal for calculating a final environment parameter based on at least one of a recommended environment parameter and the optimum environment parameter based on the environment data.
- 제7항에 있어서, The method of claim 7, wherein상기 환경 파라미터 추정부는, The environmental parameter estimator,상기 추천 환경 파라미터와 상기 환경 데이터에 기초하여 상기 추천 환경 파라미터 적용시 사육장 환경의 악화 여부를 판단하며, Determining whether the kennel environment is deteriorated when the recommended environment parameter is applied based on the recommended environment parameter and the environment data;상기 사육장 환경이 악화된다고 판단되면 상기 최적 환경 파라미터를 상기 최종 환경 파라미터로 결정하고, If it is determined that the environment of the kennel deteriorates, the optimal environmental parameter is determined as the final environmental parameter,상기 사육장 환경이 좋아진다고 판단되면, 상기 최적 환경 파라미터와 상기 추천 환경 파라미터를 조합하여 상기 최종 환경 파라미터를 산출하며, If it is determined that the environment for the kennel is improved, the final environmental parameter is calculated by combining the optimal environment parameter with the recommended environment parameter.상기 추천 환경 파라미터는, The recommended environment parameter is기계 학습 기반의 추천 환경 추정 알고리즘을 포함하는 학습 서버에 의해 생성되는 사육장 환경 관리 단말. Farm environment management terminal generated by the learning server including a machine learning-based recommendation environment estimation algorithm.
- 제8항에 있어서, The method of claim 8,상기 학습 서버는, The learning server,상기 환경 데이터를 및 상기 사육장의 동작 개체 생산량을 조합하여 제2 훈련 데이터셋을 생성하고, Combining the environmental data with the production of moving individuals in the kennel to generate a second training dataset,상기 환경 파라미터 추정부는, The environmental parameter estimator,상기 제2 훈련 데이터셋을 이용하여 상기 추천 환경 추정 알고리즘을 학습시키는 사육장 환경 관리 단말. And a kennel environment management terminal learning the recommendation environment estimation algorithm using the second training dataset.
- 제8항에 있어서, The method of claim 8,상기 학습 서버는, The learning server,상기 사육장 이외의 타 사육장에 대한 환경 데이터를 및 동작 개체 생산량을 조합하여 제2 훈련 데이터셋을 생성하고, 날짜, 지역 및 장소 중 적어도 하나에 따라 추천 환경 추정 알고리즘을 학습시키고, Generate a second training dataset by combining environmental data for the other kennels other than the kennel and the production of the moving object, and learning a recommended environment estimation algorithm according to at least one of a date, a region, and a place;상기 환경 파라미터 추정부는, The environmental parameter estimator,상기 제2 훈련 데이터셋을 이용하여 상기 추천 환경 추정 알고리즘을 학습시키는 사육장 환경 관리 단말. And a kennel environment management terminal learning the recommendation environment estimation algorithm using the second training dataset.
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| KR10-2018-0075682 | 2018-06-29 | ||
| KR10-2018-0075681 | 2018-06-29 | ||
| KR1020180075681A KR20200002314A (en) | 2018-06-29 | 2018-06-29 | System, terminal and method for managing farm environment |
| KR1020180075682A KR20200002315A (en) | 2018-06-29 | 2018-06-29 | System, terminal and method for managing farm environment |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2020005038A1 true WO2020005038A1 (en) | 2020-01-02 |
Family
ID=68987536
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/KR2019/007935 WO2020005038A1 (en) | 2018-06-29 | 2019-06-28 | System and terminal for managing environment of breeding place and method thereof |
Country Status (1)
| Country | Link |
|---|---|
| WO (1) | WO2020005038A1 (en) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115397235A (en) * | 2020-06-02 | 2022-11-25 | 艾酷帕克株式会社 | Animal product control system, animal product control server, animal product control method, and animal product control program |
| CN116340801A (en) * | 2023-05-31 | 2023-06-27 | 烟台市福山区动物疫病预防控制中心 | Intelligent monitoring method for abnormal environmental data of livestock breeding |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20120105997A (en) * | 2011-03-17 | 2012-09-26 | 원광대학교산학협력단 | A system for analyzing the movement patterns of cattle |
| KR101297694B1 (en) * | 2012-06-13 | 2013-08-21 | 농업회사법인 팜앤팜스(주) | Animal house managing system |
| KR20150130803A (en) * | 2014-05-14 | 2015-11-24 | 숭실대학교산학협력단 | The method for monitoring communicable disease and system using the method, recording medium for performing the method |
| KR20170021936A (en) * | 2015-08-18 | 2017-03-02 | 경상대학교산학협력단 | Animal management server and animal management method thereof |
| JP2017527264A (en) * | 2014-07-08 | 2017-09-21 | ネステク ソシエテ アノニム | Systems and methods for providing animal health, nutrition and / or wellness advice |
-
2019
- 2019-06-28 WO PCT/KR2019/007935 patent/WO2020005038A1/en active Application Filing
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| KR20120105997A (en) * | 2011-03-17 | 2012-09-26 | 원광대학교산학협력단 | A system for analyzing the movement patterns of cattle |
| KR101297694B1 (en) * | 2012-06-13 | 2013-08-21 | 농업회사법인 팜앤팜스(주) | Animal house managing system |
| KR20150130803A (en) * | 2014-05-14 | 2015-11-24 | 숭실대학교산학협력단 | The method for monitoring communicable disease and system using the method, recording medium for performing the method |
| JP2017527264A (en) * | 2014-07-08 | 2017-09-21 | ネステク ソシエテ アノニム | Systems and methods for providing animal health, nutrition and / or wellness advice |
| KR20170021936A (en) * | 2015-08-18 | 2017-03-02 | 경상대학교산학협력단 | Animal management server and animal management method thereof |
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115397235A (en) * | 2020-06-02 | 2022-11-25 | 艾酷帕克株式会社 | Animal product control system, animal product control server, animal product control method, and animal product control program |
| CN116340801A (en) * | 2023-05-31 | 2023-06-27 | 烟台市福山区动物疫病预防控制中心 | Intelligent monitoring method for abnormal environmental data of livestock breeding |
| CN116340801B (en) * | 2023-05-31 | 2023-07-28 | 烟台市福山区动物疫病预防控制中心 | Intelligent monitoring method for abnormal environmental data of livestock breeding |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2017091008A1 (en) | Mobile robot and control method therefor | |
| WO2020005038A1 (en) | System and terminal for managing environment of breeding place and method thereof | |
| KR20200002315A (en) | System, terminal and method for managing farm environment | |
| WO2019083299A1 (en) | Rearing place management device and method | |
| KR20200002314A (en) | System, terminal and method for managing farm environment | |
| WO2021221249A1 (en) | Smart livestock management system and method for same | |
| US20210368776A1 (en) | System and methods for automated wildlife detection, monitoring and control | |
| US20200226360A1 (en) | System and method for automatically detecting and classifying an animal in an image | |
| JP2019024482A (en) | Information processing system, information processing device, and program | |
| WO2019212237A1 (en) | Abnormal entity detection device and method | |
| WO2020017814A1 (en) | Abnormal entity detection system and method | |
| US10636174B2 (en) | Abnormality detection system, abnormality detection method, and program | |
| JP6704979B1 (en) | Unmanned aerial vehicle, unmanned aerial vehicle system and unmanned aerial vehicle control system | |
| WO2019168323A1 (en) | Apparatus and method for detecting abnormal object, and photographing device comprising same | |
| WO2021177805A1 (en) | Device, method, and system for sound source localization and sound source cancellation | |
| US20220083811A1 (en) | Monitoring camera, part association method and program | |
| WO2020141888A1 (en) | Device for managing environment of breeding farm | |
| KR102615986B1 (en) | Apparatus and method for determining abnormal object | |
| KR20190103510A (en) | Imaging device, apparatus and method for managing of fowl comprising the same | |
| González et al. | Real-time monitoring of poultry activity in breeding farms | |
| KR102606062B1 (en) | Apparatus and method for detecting abnormal object and imaging device comprising the same | |
| KR102505691B1 (en) | Apparatus and method for detecting abnormal object and imaging device comprising the same | |
| WO2022225102A1 (en) | Adjustment of shutter value of surveillance camera via ai-based object recognition | |
| KR20190113360A (en) | Apparatus and method for detecting abnormal object and imaging device comprising the same | |
| KR102307609B1 (en) | Apparatus and method for detecting abnormal object and imaging device comprising the same |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 19827405 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 19827405 Country of ref document: EP Kind code of ref document: A1 |