WO2019203293A1 - Endoscope - Google Patents
Endoscope Download PDFInfo
- Publication number
- WO2019203293A1 WO2019203293A1 PCT/JP2019/016561 JP2019016561W WO2019203293A1 WO 2019203293 A1 WO2019203293 A1 WO 2019203293A1 JP 2019016561 W JP2019016561 W JP 2019016561W WO 2019203293 A1 WO2019203293 A1 WO 2019203293A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- feeding device
- sensor
- endoscope
- wireless power
- power feeding
- Prior art date
Links
Images





Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/06—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor with illuminating arrangements
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/04—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor combined with photographic or television appliances
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B1/00—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor
- A61B1/04—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor combined with photographic or television appliances
- A61B1/05—Instruments for performing medical examinations of the interior of cavities or tubes of the body by visual or photographical inspection, e.g. endoscopes; Illuminating arrangements therefor combined with photographic or television appliances characterised by the image sensor, e.g. camera, being in the distal end portion
-
- G—PHYSICS
- G02—OPTICS
- G02B—OPTICAL ELEMENTS, SYSTEMS OR APPARATUS
- G02B23/00—Telescopes, e.g. binoculars; Periscopes; Instruments for viewing the inside of hollow bodies; Viewfinders; Optical aiming or sighting devices
- G02B23/24—Instruments or systems for viewing the inside of hollow bodies, e.g. fibrescopes
Definitions
- This disclosure relates to an endoscope.
- an endoscope in general, includes a connector portion connected to a control unit, a bending portion and a bending portion in order from the connector portion to the operation portion, and extends from the operation portion via a second bending portion.
- the insertion portion includes an insertion portion to be inserted into the to-be-affected part, and the insertion portion includes a flexible flexible tube, a bending tube bent by remote operation, and a distal end rigid portion in order from the hand-held operation portion side.
- the flexible tube (the side closer to the processor) of the endoscope, in particular, the distal end side of the folding preventing portion (pressing rubber portion) is rotated by the operation of the operator.
- the flexible tube is bent and tensioned.
- video signal transmission of the sensor solid-state image sensor: CMOS, CCD, etc.
- driving power of the light source (illumination unit, LED, etc.) provided at the sensor and tip are transmitted.
- An object of the present disclosure is to reduce an influence on a signal line that transmits video signal transmission of a sensor or driving power of a sensor or a light source due to bending of a flexible tube.
- the connector unit includes a connector unit connected to a controller having a power source, an operation unit connected to the connector unit, and an insertion unit inserted into a to-be-affected part.
- the endoscope is provided with an anti-bending part and a bending part in order from the connector part on the operation part side of the endoscope, and has a rotation mechanism that allows the anti-bending part and the bending part to rotate.
- the first board provided in the connector part is provided with the first wireless power feeding device for transmitting power from the power source, and the second board provided in the bent part has the above-mentioned
- a second wireless power feeding device that receives power transmitted wirelessly from the first wireless power feeding device is provided, and power from the second wireless power feeding device is supplied to a sensor provided in the insertion portion.
- An endoscope is provided
- the first wireless power feeding device is connected to a first coil
- the second wireless power feeding device is connected to a second coil
- the first coil and the second coil are: It is preferable that they are arranged close to each other along the rotation axis direction.
- a light source is provided in the insertion portion, and that power from the second wireless power feeding device is supplied to the light source provided in the insertion portion.
- a first optical wireless device is provided in the anti-bending portion, and a second optical wireless device is provided in the bent portion, and a sensing signal from the sensor may be transmitted by optical communication.
- the rotation mechanism preferably has a rotatable angle of 360 degrees or more.
- the bend preventing part may be formed of an elastic member.
- the sensor may be a solid-state image sensor.
- At least one of the first substrate and the second substrate has a regulator for adjusting power supplied from the power source to the sensor.
- the bent portion is preferably formed of a flexible tube.
- FIG. 4 is a side view showing an example of the internal configuration of a signal transmission mechanism in a configuration including an operation portion, a bent portion in the vicinity of the insertion portion, and a first folding stop portion provided between the operation portion and the bent portion. is there.
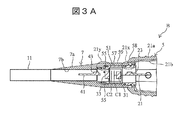
- FIG. 3 is a cross-sectional view showing an example of a mechanical configuration mainly between a first bend preventing portion shown in FIG. 2 and a bent portion in the vicinity thereof. It is a perspective view which shows the example of an internal structure corresponding to FIG. 3A.
- FIG. 4A is a view corresponding to FIG. 3B
- FIG. 4A is a perspective view before rotation
- FIG. 4B is a perspective view when rotated.
- It is a functional block diagram which shows the example of 1 structure of the endoscope in one Embodiment.
- FIG. 1 is a diagram illustrating a schematic configuration example of an endoscope according to the present embodiment.
- the endoscope A includes a grip operation unit 15 gripped by an operator and an insertion unit 12 extending from the grip operation unit 15.
- the video processor 1 can be connected to the endoscope A so as to function as an endoscope system.
- a universal tube (universal cord) 16 extends from the grip operation unit 15, and a connector unit 5 is provided at the tip of the universal tube 16. Further, from the distal end side of the endoscope A, an insertion portion 12 including a sensor 61 and a light source 63 such as an LED, a grip operation portion 15, a universal tube 16, and a connector portion 5 are arranged.
- the connector terminal 5 a of the connector unit 5 is connected to a connector terminal (not shown) of the video processor 1 having the power source 3
- the sensor 61 and the light source 63 are connected to the power source 3 built in the video processor 1.
- the light source 63 may be provided in the grip operation unit 15.
- the power supplied from the power supply 3 built in the video processor 1 is supplied to an illumination lens (not shown) provided on the front end surface of the light source 63 of the insertion portion 12 of the endoscope A, for illumination.
- the light is emitted outward with a predetermined light distribution by the lens.
- the image signal of the subject obtained by the sensor 61 is transmitted to the video processor 1.
- FIG. 2 shows a radio in a configuration including a connector portion 5, a bent portion 11 in the vicinity of the insertion portion 12, and a first bend preventing portion 7 provided between the connector portion 5 and the bent portion 11.
- a first substrate 21 is disposed in the connector portion 5.
- the first substrate 21 is provided with a first wireless power feeding device 23 that transmits power supplied from the power supply 3.
- a first wireless power feeding coil C ⁇ b> 1 and an optical wireless device 31 are disposed in the first bend preventing part 7 following the connector part 5.
- Wirings L2 and L3 are provided between the first wireless power feeding device 23 and the first wireless power feeding coil C1.
- a second substrate 41 is disposed in the bent portion 11 disposed at a position facing the first folding stop portion 7.
- a second wireless power feeding coil C2, an optical wireless device 33, and a second wireless power feeding device 43 that receives the power transmitted from the first wireless power feeding device 23 are provided on the second substrate 41.
- Wirings L4 and L5 are provided between the second wireless power feeding device 43 and the second wireless power feeding coil C2.
- the first wireless power feeding coil C1 and the second wireless power feeding coil C2 are disposed to face each other at a certain distance.
- the second wireless power feeding device 43 is connected to the sensor 61 and the light source 63 through wiring.
- the driving power of the sensor 61 and the light source 63 is wireless power feeding in which the transmission side and the reception side are separated between the bent portion 11 and the first folding stop portion 7. It can be transmitted by the coil for use. As a result, even if an extra tension is applied to the universal tube (flexible tube) 16, the tension is absorbed between the bent portion 11 and the first bend preventing portion 7, and finally the signal of the sensor 61 or The light source 63 can be appropriately driven. As described above, the power supply to the sensor 61 and the power supply to the light source 63 can be transmitted by the coil for wireless power feeding in which the transmission side and the reception side are separated.
- the video signal obtained from the sensor 61 is optically wirelessly transmitted by the optical wireless device 33 on the transmission side provided in the bent portion 11 and the optical optical device 31 on the reception side provided in the first folding stop portion 7. Can be transmitted.
- power and signals can be exchanged wirelessly between the bent portion 11 that is mechanically separated and rotated and the first bend preventing portion 7. Since it is not necessary to supply power or transmit signals through a continuous cable between the video processor 1 or the power source 3 and the insertion portion 12, the bent portion 11 and the first folding portion 7 that are mechanically separated There is no need to connect between the two with a wired cable.
- FIG. 3A is a cross-sectional view showing a mechanical example mainly between the first bend preventing part 7 shown in FIG. 2 and the bent part 11 in the vicinity thereof
- FIG. 3B is an internal view corresponding to FIG. 3A.
- It is a perspective view which shows the example of a structure.
- 4A and 4B are views corresponding to FIG. 3B
- FIG. 4A is a perspective view before rotation
- FIG. 4B is a perspective view when rotated.
- the connector unit 5 As shown in FIGS. 3A, 3B, and 4
- the connector unit 5, the connecting tube 57, the rotating tube 51, and the stop tube 55 are arranged in order from the connector unit 5 to the grip operation unit 15.
- a rotating tube 51 is inserted into a hollow cylindrical connecting tube 57 and fixed by a stop tube 55.
- This configuration is generally used as a coupling mechanism that can rotate with each other.
- rotation is regulated by providing a dowel 53.
- the rotation restriction mechanism is removed by not providing the rotation restriction portion (the dowel 53).
- the rotation mechanism is not limited to such an example, and a known rotation mechanism can be used.
- the members 58 and 59 are covering portions provided on the outside of the tube.
- FIG. 5 is a functional block diagram illustrating a configuration example of the endoscope according to the present embodiment.
- the example of an electrical structure mainly between the 1st bending prevention part 7 and the bending part 11 of the vicinity is shown.
- the endoscope according to the present embodiment is provided with a connector portion 5 connected to the video processor 1, a first bend preventing portion 7, a bent portion 11, and a sensor 61. Yes.
- the first substrate 21 is provided in the first bend preventing portion 7, and the second substrate 41 is provided in the bent portion 11.
- the video processor (controller) 1 is provided with, for example, a power supply 3 and a video signal processing circuit (FPGA) 83.
- a first substrate 21 is provided in the first bend preventing part 7.
- the first substrate 21 is provided with a regulator 21-2 for adjusting power from the power source 3 and a power transmission IC 21-1 including a coil C1.
- a TIA transimpedance amplifier
- PD photodiode
- the buffer 21-3 temporarily stores the voltage signal and transmits it for each unit on the video processor 1 side.
- the bent portion 11 is provided with a second substrate 41.
- the second substrate 41 is provided with a power receiving IC 41-1 having a coil C2 and a regulator 41-2 for adjusting the power from the power receiving IC 41-1, and the adjusted received power is output to the sensor 61.
- the video signal from the sensor 61 includes a signal correction circuit 41-3 (EQ) provided with the second substrate 41, a video signal drive circuit 41-4 (VCSEL driver), and a video signal wireless transmission circuit 41-5 ( Via the VCSEL) to the optical device 21-5 (PD). Therefore, the power from the power source 3 and the video signal from the sensor 61 can be transmitted between the first anti-folding portion 7 and the bent portion 11 even in a configuration without physical connection. Therefore, it is possible to transmit power and a video signal while providing a mechanical mechanism that rotates 360 degrees or more between the first bend preventing portion 7 and the bent portion 11.
- this embodiment can be operated as follows. 1) A structure in which the anti-bending part (restraining rubber part (elastic member)) can rotate 360 degrees or more is obtained. 2) The wireless power feeding device can be arranged in the bend preventing part, and the transmitting / receiving device and the coil can be arranged in accordance with the rotational position.
- the wireless power feeding method may be either an electromagnetic induction method or a magnetic resonance method.
- the optical wireless device is arranged in the anti-bending portion, and arranged so that the communication device surface is aligned even if it is rotated. 4)
- a light source is arranged in the insertion part or the grip operation part. 5) The power by wireless power feeding can change the device, coil, etc. according to the driving power of the sensor and light source.
- the illustrated configuration and the like are not limited to these, and can be changed as appropriate within the scope of the effects of the present disclosure.
- Other modifications may be made as appropriate without departing from the scope of the object of the present disclosure.
- the components for wireless power feeding and optical wireless communication may be arranged on either one of both sides mechanically separated, and are not limited to the arrangement positions shown in the embodiments and drawings.
- each component of this indication can be selected arbitrarily, and the selected structure is also contained in this technique.
- This disclosure can be used for endoscopes.
- a Endoscope (system) C1, C2 Wireless power supply coil 1 Video processor 3 Power supply 5 Connector part 5a Connector terminal 12 Insertion part 15 Grasping operation part (operation part) 16 Universal tube 21 First substrate 23 First wireless power supply device 31, 33 Optical wireless device 41 Second substrate 43 Second wireless power supply device 51 Rotating tube 55 Stop tube 57 Connecting tube 58, 59 Cover 61 Sensor (solid-state image sensor) 63 Light source
Landscapes
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Surgery (AREA)
- Physics & Mathematics (AREA)
- Optics & Photonics (AREA)
- Biomedical Technology (AREA)
- Animal Behavior & Ethology (AREA)
- Radiology & Medical Imaging (AREA)
- Nuclear Medicine, Radiotherapy & Molecular Imaging (AREA)
- Engineering & Computer Science (AREA)
- Biophysics (AREA)
- Heart & Thoracic Surgery (AREA)
- Medical Informatics (AREA)
- Molecular Biology (AREA)
- Pathology (AREA)
- General Health & Medical Sciences (AREA)
- Public Health (AREA)
- Veterinary Medicine (AREA)
- Astronomy & Astrophysics (AREA)
- General Physics & Mathematics (AREA)
- Instruments For Viewing The Inside Of Hollow Bodies (AREA)
- Endoscopes (AREA)
Abstract
The purpose of the present invention is to reduce the influence on video signal transmission by a solid-state image capture element or on a signal line for transmitting drive power to a sensor or a tip-end light source or the like due to bending of a flexible tube. The present disclosure provides an endoscope comprising: a connector portion connected to a controller equipped with a power supply; an operating portion connected to the connector portion; and an insertion portion to be inserted into an area to be examined. The connector portion is provided, on the operating portion side thereof, with a bending-prevention portion and a flexion portion successively from the connector portion. The endoscope has a rotating mechanism for enabling rotation of the bending-prevention portion and the flexion portion. A first substrate disposed in the connector portion has a first wireless feeding device for transmitting power from the power supply. A second substrate disposed in the flexion portion has a second wireless feeding device for receiving power transmitted wirelessly from the first wireless feeding device. The power from the second wireless feeding device is supplied to a sensor with which the insertion portion is provided.
Description
本開示は、内視鏡に関する。
This disclosure relates to an endoscope.
一般に内視鏡は、制御ユニットに接続されるコネクタ部と、コネクタ部から延びて操作部に至る順番に折れ止め部と屈曲部とを備え、操作部から延びて第2の折れ止め部を経て被険部位に挿入される挿入部を備え、挿入部は、手許操作部側から順に、可撓性のある可撓管、遠隔操作により屈曲する湾曲管、及び先端硬性部を備えている。
内視鏡によれば、振り操作の代わりに操作部に対して挿入部を回転させることによって、操作性が向上し、手技時間が短縮され、術者の負担および患者の負担が大幅に軽減される(例えば、先行文献1,2参照)。 In general, an endoscope includes a connector portion connected to a control unit, a bending portion and a bending portion in order from the connector portion to the operation portion, and extends from the operation portion via a second bending portion. The insertion portion includes an insertion portion to be inserted into the to-be-affected part, and the insertion portion includes a flexible flexible tube, a bending tube bent by remote operation, and a distal end rigid portion in order from the hand-held operation portion side.
According to the endoscope, by rotating the insertion portion with respect to the operation portion instead of the swing operation, the operability is improved, the procedure time is shortened, and the burden on the operator and the patient is greatly reduced. (See, for example, prior documents 1 and 2).
内視鏡によれば、振り操作の代わりに操作部に対して挿入部を回転させることによって、操作性が向上し、手技時間が短縮され、術者の負担および患者の負担が大幅に軽減される(例えば、先行文献1,2参照)。 In general, an endoscope includes a connector portion connected to a control unit, a bending portion and a bending portion in order from the connector portion to the operation portion, and extends from the operation portion via a second bending portion. The insertion portion includes an insertion portion to be inserted into the to-be-affected part, and the insertion portion includes a flexible flexible tube, a bending tube bent by remote operation, and a distal end rigid portion in order from the hand-held operation portion side.
According to the endoscope, by rotating the insertion portion with respect to the operation portion instead of the swing operation, the operability is improved, the procedure time is shortened, and the burden on the operator and the patient is greatly reduced. (See, for example, prior documents 1 and 2).
内視鏡の可撓管(プロセッサに近い側)、特に折れ止め部(押さえゴム部)先端側は、操作者の操作により、回転する。可撓管は曲がりテンションのかかった状態になる。
可撓管の折れ曲がりが頻繁になると、先端部にあるセンサ(固体撮像素子;CMOS、CCDなど)の映像信号伝送やセンサや先端に設けられる光源(照明部,LED等)等の駆動電力を送信する信号線(挿入部から制御ユニットまで延びる有線ケーブル)に影響する。
本開示は、可撓管の折れ曲がりによるセンサの映像信号伝送やセンサや光源等の駆動電力等を送信する信号線への影響を低減することを目的とする。 The flexible tube (the side closer to the processor) of the endoscope, in particular, the distal end side of the folding preventing portion (pressing rubber portion) is rotated by the operation of the operator. The flexible tube is bent and tensioned.
When the flexible tube is bent frequently, video signal transmission of the sensor (solid-state image sensor: CMOS, CCD, etc.) at the tip and driving power of the light source (illumination unit, LED, etc.) provided at the sensor and tip are transmitted. Affects the signal line (wired cable extending from the insertion section to the control unit).
An object of the present disclosure is to reduce an influence on a signal line that transmits video signal transmission of a sensor or driving power of a sensor or a light source due to bending of a flexible tube.
可撓管の折れ曲がりが頻繁になると、先端部にあるセンサ(固体撮像素子;CMOS、CCDなど)の映像信号伝送やセンサや先端に設けられる光源(照明部,LED等)等の駆動電力を送信する信号線(挿入部から制御ユニットまで延びる有線ケーブル)に影響する。
本開示は、可撓管の折れ曲がりによるセンサの映像信号伝送やセンサや光源等の駆動電力等を送信する信号線への影響を低減することを目的とする。 The flexible tube (the side closer to the processor) of the endoscope, in particular, the distal end side of the folding preventing portion (pressing rubber portion) is rotated by the operation of the operator. The flexible tube is bent and tensioned.
When the flexible tube is bent frequently, video signal transmission of the sensor (solid-state image sensor: CMOS, CCD, etc.) at the tip and driving power of the light source (illumination unit, LED, etc.) provided at the sensor and tip are transmitted. Affects the signal line (wired cable extending from the insertion section to the control unit).
An object of the present disclosure is to reduce an influence on a signal line that transmits video signal transmission of a sensor or driving power of a sensor or a light source due to bending of a flexible tube.
本開示の一観点によれば、電源を備えたコントローラに接続されるコネクタ部と、前記コネクタ部に接続される操作部と、被険部位に挿入される挿入部とを有し、前記コネクタ部の前記操作部側に前記コネクタ部から順番に折れ止め部と、屈曲部とが設けられている内視鏡であって、前記折れ止め部と前記屈曲部とを回転可能とする回転機構を有し、前記コネクタ部内に設けられた第1の基板には前記電源からの電力を伝送する前記第1の無線給電用デバイスが設けられ、前記屈曲部内に設けられた第2の基板には、前記第1の無線給電用デバイスから無線により伝送された電力を受け取る第2の無線給電用デバイスが設けられ、前記第2の無線給電用デバイスからの電力が前記挿入部に設けられたセンサに供給される内視鏡が提供される。
According to one aspect of the present disclosure, the connector unit includes a connector unit connected to a controller having a power source, an operation unit connected to the connector unit, and an insertion unit inserted into a to-be-affected part. The endoscope is provided with an anti-bending part and a bending part in order from the connector part on the operation part side of the endoscope, and has a rotation mechanism that allows the anti-bending part and the bending part to rotate. The first board provided in the connector part is provided with the first wireless power feeding device for transmitting power from the power source, and the second board provided in the bent part has the above-mentioned A second wireless power feeding device that receives power transmitted wirelessly from the first wireless power feeding device is provided, and power from the second wireless power feeding device is supplied to a sensor provided in the insertion portion. An endoscope is provided
前記第1の無線給電用デバイスは、第1のコイルに接続され、前記第2の無線給電用デバイスは、第2のコイルに接続され、前記第1のコイルと前記第2のコイルとは、回転軸方向に沿って近接して対向配置されていることが好ましい。
さらに、前記挿入部には光源が設けられ、前記第2の無線給電用デバイスからの電力が前記挿入部に設けられた前記光源に供給されることが好ましい。
前記折れ止め部には、第1の光無線デバイスが設けられ、前記屈曲部には、第2の光無線デバイスが設けられ、前記センサからのセンシング信号を光通信により伝達するようにすると良い。 The first wireless power feeding device is connected to a first coil, the second wireless power feeding device is connected to a second coil, and the first coil and the second coil are: It is preferable that they are arranged close to each other along the rotation axis direction.
Furthermore, it is preferable that a light source is provided in the insertion portion, and that power from the second wireless power feeding device is supplied to the light source provided in the insertion portion.
A first optical wireless device is provided in the anti-bending portion, and a second optical wireless device is provided in the bent portion, and a sensing signal from the sensor may be transmitted by optical communication.
さらに、前記挿入部には光源が設けられ、前記第2の無線給電用デバイスからの電力が前記挿入部に設けられた前記光源に供給されることが好ましい。
前記折れ止め部には、第1の光無線デバイスが設けられ、前記屈曲部には、第2の光無線デバイスが設けられ、前記センサからのセンシング信号を光通信により伝達するようにすると良い。 The first wireless power feeding device is connected to a first coil, the second wireless power feeding device is connected to a second coil, and the first coil and the second coil are: It is preferable that they are arranged close to each other along the rotation axis direction.
Furthermore, it is preferable that a light source is provided in the insertion portion, and that power from the second wireless power feeding device is supplied to the light source provided in the insertion portion.
A first optical wireless device is provided in the anti-bending portion, and a second optical wireless device is provided in the bent portion, and a sensing signal from the sensor may be transmitted by optical communication.
前記回転機構は、回転可能角度が360度以上であることが好ましい。例えば、回転を停止する機構を備えていないことが好ましい。
前記折れ止め部は、弾性部材により形成されているようにすると良い。
前記センサは、固体撮像素子であっても良い。 The rotation mechanism preferably has a rotatable angle of 360 degrees or more. For example, it is preferable not to include a mechanism for stopping rotation.
The bend preventing part may be formed of an elastic member.
The sensor may be a solid-state image sensor.
前記折れ止め部は、弾性部材により形成されているようにすると良い。
前記センサは、固体撮像素子であっても良い。 The rotation mechanism preferably has a rotatable angle of 360 degrees or more. For example, it is preferable not to include a mechanism for stopping rotation.
The bend preventing part may be formed of an elastic member.
The sensor may be a solid-state image sensor.
前記第1の基板又は第2の基板の少なくともいずれか一方に、前記電源から前記センサに供給する電力を調整するレギュレータを有するようにすることが好ましい。
前記屈曲部は可撓管により形成されていることが好ましい。 It is preferable that at least one of the first substrate and the second substrate has a regulator for adjusting power supplied from the power source to the sensor.
The bent portion is preferably formed of a flexible tube.
前記屈曲部は可撓管により形成されていることが好ましい。 It is preferable that at least one of the first substrate and the second substrate has a regulator for adjusting power supplied from the power source to the sensor.
The bent portion is preferably formed of a flexible tube.
本開示によれば、可撓管の折れ曲がりによる、センサの映像信号伝送やセンサや先端の光源等の駆動電力を送信する信号線への影響を低減することができる。
According to the present disclosure, it is possible to reduce the influence of the bending of the flexible tube on the signal line that transmits the video signal transmission of the sensor and the driving power of the sensor and the light source at the tip.
以下に、本実施形態による内視鏡について図面を参照しながら詳細に説明する。
Hereinafter, the endoscope according to the present embodiment will be described in detail with reference to the drawings.
図1は、本実施形態による内視鏡の概略構成例を示す図である。
図1に示すように、内視鏡Aは、操作者が把持する把持操作部15と、この把持操作部15から延出する挿入部12とを有している。内視鏡Aにビデオプロセッサ1を接続して内視鏡システムとして機能させることができる。 FIG. 1 is a diagram illustrating a schematic configuration example of an endoscope according to the present embodiment.
As shown in FIG. 1, the endoscope A includes agrip operation unit 15 gripped by an operator and an insertion unit 12 extending from the grip operation unit 15. The video processor 1 can be connected to the endoscope A so as to function as an endoscope system.
図1に示すように、内視鏡Aは、操作者が把持する把持操作部15と、この把持操作部15から延出する挿入部12とを有している。内視鏡Aにビデオプロセッサ1を接続して内視鏡システムとして機能させることができる。 FIG. 1 is a diagram illustrating a schematic configuration example of an endoscope according to the present embodiment.
As shown in FIG. 1, the endoscope A includes a
把持操作部15からはユニバーサルチューブ(ユニバーサルコード)16が延出されており、このユニバーサルチューブ16の先端にはコネクタ部5が設けられている。さらに、内視鏡Aの先端側から、センサ61・LEDなどの光源63を備える挿入部12、把持操作部15、ユニバーサルチューブ16、コネクタ部5が配置されている。コネクタ部5のコネクタ端子5aが電源3を有するビデオプロセッサ1のコネクタ端子(図示せず)に接続されると、センサ61・光源63は、ビデオプロセッサ1に内蔵された電源3と接続される。尚、光源63は把持操作部15に設けても良い。
A universal tube (universal cord) 16 extends from the grip operation unit 15, and a connector unit 5 is provided at the tip of the universal tube 16. Further, from the distal end side of the endoscope A, an insertion portion 12 including a sensor 61 and a light source 63 such as an LED, a grip operation portion 15, a universal tube 16, and a connector portion 5 are arranged. When the connector terminal 5 a of the connector unit 5 is connected to a connector terminal (not shown) of the video processor 1 having the power source 3, the sensor 61 and the light source 63 are connected to the power source 3 built in the video processor 1. The light source 63 may be provided in the grip operation unit 15.
そして、ビデオプロセッサ1に内蔵された電源3から供給される電力が、内視鏡Aの挿入部12の光源63の前端面に設けられた照明用レンズ(図示せず)に供給され、照明用レンズによって所定の配光で外方に出射される。センサ61で得られた被写体の画像信号は、ビデオプロセッサ1に伝送される。
Then, the power supplied from the power supply 3 built in the video processor 1 is supplied to an illumination lens (not shown) provided on the front end surface of the light source 63 of the insertion portion 12 of the endoscope A, for illumination. The light is emitted outward with a predetermined light distribution by the lens. The image signal of the subject obtained by the sensor 61 is transmitted to the video processor 1.
図2は、コネクタ部5と、その挿入部12側の近傍の屈曲部11と、コネクタ部5から屈曲部11までの間に設けられている第1の折れ止め部7とを含む構成における無線での電力伝達機構と無線での信号伝達機構の内部構成例Bを示す側面図である。
図2等に示すように、コネクタ部5内には、第1の基板21が配置されている。第1の基板21には、電源3から供給される電力を伝送する第1の無線給電用デバイス23が設けられている。コネクタ部5に続く第1の折れ止め部7には、第1の無線給電用コイルC1と、光無線デバイス31とが配置されている。第1の無線給電用デバイス23と第1の無線給電用コイルC1との間には、配線L2、L3が設けられている。 FIG. 2 shows a radio in a configuration including aconnector portion 5, a bent portion 11 in the vicinity of the insertion portion 12, and a first bend preventing portion 7 provided between the connector portion 5 and the bent portion 11. It is a side view which shows the internal structural example B of the electric power transmission mechanism in and the signal transmission mechanism in radio | wireless.
As shown in FIG. 2 and the like, afirst substrate 21 is disposed in the connector portion 5. The first substrate 21 is provided with a first wireless power feeding device 23 that transmits power supplied from the power supply 3. A first wireless power feeding coil C <b> 1 and an optical wireless device 31 are disposed in the first bend preventing part 7 following the connector part 5. Wirings L2 and L3 are provided between the first wireless power feeding device 23 and the first wireless power feeding coil C1.
図2等に示すように、コネクタ部5内には、第1の基板21が配置されている。第1の基板21には、電源3から供給される電力を伝送する第1の無線給電用デバイス23が設けられている。コネクタ部5に続く第1の折れ止め部7には、第1の無線給電用コイルC1と、光無線デバイス31とが配置されている。第1の無線給電用デバイス23と第1の無線給電用コイルC1との間には、配線L2、L3が設けられている。 FIG. 2 shows a radio in a configuration including a
As shown in FIG. 2 and the like, a
一方、第1の折れ止め部7と対向する位置に配置される屈曲部11内には、第2の基板41が配置されている。第2の基板41上には、第2の無線給電用コイルC2と、光無線デバイス33と、第1の無線給電用デバイス23から伝送された電力を受け取る第2の無線給電用デバイス43が設けられている。第2の無線給電用デバイス43と第2の無線給電用コイルC2との間には、配線L4、L5が設けられている。
第1の無線給電用コイルC1と第2の無線給電用コイルC2とは、ある距離だけ離れて(近接して)対向配置されている。第2の無線給電用デバイス43は、配線を介してセンサ61,光源63に接続される。 On the other hand, asecond substrate 41 is disposed in the bent portion 11 disposed at a position facing the first folding stop portion 7. On the second substrate 41, a second wireless power feeding coil C2, an optical wireless device 33, and a second wireless power feeding device 43 that receives the power transmitted from the first wireless power feeding device 23 are provided. It has been. Wirings L4 and L5 are provided between the second wireless power feeding device 43 and the second wireless power feeding coil C2.
The first wireless power feeding coil C1 and the second wireless power feeding coil C2 are disposed to face each other at a certain distance. The second wirelesspower feeding device 43 is connected to the sensor 61 and the light source 63 through wiring.
第1の無線給電用コイルC1と第2の無線給電用コイルC2とは、ある距離だけ離れて(近接して)対向配置されている。第2の無線給電用デバイス43は、配線を介してセンサ61,光源63に接続される。 On the other hand, a
The first wireless power feeding coil C1 and the second wireless power feeding coil C2 are disposed to face each other at a certain distance. The second wireless
以上のような無線電力伝達機構を設けることで、センサ61,光源63の駆動電力は、屈曲部11と第1の折れ止め部7との間において、送信側と受信側とを分離した無線給電用コイルにより伝送することが出来る。これにより、ユニバーサルチューブ(可撓管)16に余分なテンションがかかっても、屈曲部11と第1の折れ止め部7との間においてテンションが吸収され、最終的に必要なセンサ61の信号や光源63を適切に駆動させることができる。このように、センサ61への電力、光源63への電力の供給は、送信側と受信側とを分離した無線給電用コイルにより伝送することが出来る。
さらに、センサ61から得られた映像信号は、屈曲部11に設けられた送信側の光無線デバイス33と第1の折れ止め部7に設けられた受信側の光無線デバイス31とにより光無線により伝送することができる。このように、機械的に分離され回転する屈曲部11と第1の折れ止め部7との間の電力や信号のやり取りを無線で行うことができる。
ビデオプロセッサ1や電源3と挿入部12との間における連続したケーブルにより電力の供給や信号の伝達を行う必要がないため、機械的に分離された屈曲部11と第1の折れ止め部7との間を有線ケーブルで繋げる必要が無い。 By providing the wireless power transmission mechanism as described above, the driving power of thesensor 61 and the light source 63 is wireless power feeding in which the transmission side and the reception side are separated between the bent portion 11 and the first folding stop portion 7. It can be transmitted by the coil for use. As a result, even if an extra tension is applied to the universal tube (flexible tube) 16, the tension is absorbed between the bent portion 11 and the first bend preventing portion 7, and finally the signal of the sensor 61 or The light source 63 can be appropriately driven. As described above, the power supply to the sensor 61 and the power supply to the light source 63 can be transmitted by the coil for wireless power feeding in which the transmission side and the reception side are separated.
Further, the video signal obtained from thesensor 61 is optically wirelessly transmitted by the optical wireless device 33 on the transmission side provided in the bent portion 11 and the optical optical device 31 on the reception side provided in the first folding stop portion 7. Can be transmitted. In this way, power and signals can be exchanged wirelessly between the bent portion 11 that is mechanically separated and rotated and the first bend preventing portion 7.
Since it is not necessary to supply power or transmit signals through a continuous cable between the video processor 1 or thepower source 3 and the insertion portion 12, the bent portion 11 and the first folding portion 7 that are mechanically separated There is no need to connect between the two with a wired cable.
さらに、センサ61から得られた映像信号は、屈曲部11に設けられた送信側の光無線デバイス33と第1の折れ止め部7に設けられた受信側の光無線デバイス31とにより光無線により伝送することができる。このように、機械的に分離され回転する屈曲部11と第1の折れ止め部7との間の電力や信号のやり取りを無線で行うことができる。
ビデオプロセッサ1や電源3と挿入部12との間における連続したケーブルにより電力の供給や信号の伝達を行う必要がないため、機械的に分離された屈曲部11と第1の折れ止め部7との間を有線ケーブルで繋げる必要が無い。 By providing the wireless power transmission mechanism as described above, the driving power of the
Further, the video signal obtained from the
Since it is not necessary to supply power or transmit signals through a continuous cable between the video processor 1 or the
次に、本実施の形態による内視鏡の機械的構造について詳細に説明する。
図3Aは、図2に示す第1の折れ止め部7とその近傍の屈曲部11との間の主として機械的な一構成例を示す断面図であり、図3Bは、図3Aに対応する内部構成例を示す透視図である。図4は、図3Bに対応する図であり、図4(a)は回転前の透視図であり、図4(b)は回転させた場合の透視図である。
図3A、図3B及び図4に示すように、コネクタ部5から把持操作部15にかけて順番に、コネクタ部5,連結管57、回転管51、止め管55が配置されている。 Next, the mechanical structure of the endoscope according to the present embodiment will be described in detail.
FIG. 3A is a cross-sectional view showing a mechanical example mainly between the firstbend preventing part 7 shown in FIG. 2 and the bent part 11 in the vicinity thereof, and FIG. 3B is an internal view corresponding to FIG. 3A. It is a perspective view which shows the example of a structure. 4A and 4B are views corresponding to FIG. 3B, FIG. 4A is a perspective view before rotation, and FIG. 4B is a perspective view when rotated.
As shown in FIGS. 3A, 3B, and 4, theconnector unit 5, the connecting tube 57, the rotating tube 51, and the stop tube 55 are arranged in order from the connector unit 5 to the grip operation unit 15.
図3Aは、図2に示す第1の折れ止め部7とその近傍の屈曲部11との間の主として機械的な一構成例を示す断面図であり、図3Bは、図3Aに対応する内部構成例を示す透視図である。図4は、図3Bに対応する図であり、図4(a)は回転前の透視図であり、図4(b)は回転させた場合の透視図である。
図3A、図3B及び図4に示すように、コネクタ部5から把持操作部15にかけて順番に、コネクタ部5,連結管57、回転管51、止め管55が配置されている。 Next, the mechanical structure of the endoscope according to the present embodiment will be described in detail.
FIG. 3A is a cross-sectional view showing a mechanical example mainly between the first
As shown in FIGS. 3A, 3B, and 4, the
中空円筒状の連結管57内に、回転管51を挿入して、止め管55により固定している。尚、この構成は、互いに回転可能な連結機構として一般的であるが、一般的な回転可能な連結機構では、ダボ53を設けることで、回転規制を行っている。一方、本実施の形態では、回転規制部(ダボ53)を設けないことで、回転規制機構を除去している。これにより、コネクタ部5と第1の折れ止め部7とを、360℃以上にわたって自由に相互に回転させることができる。
回転機構としては、このような例に限定されることなく、公知の回転機構を用いることができる。
尚、部材58,59は、管の外側に設けた被覆部である。 A rotatingtube 51 is inserted into a hollow cylindrical connecting tube 57 and fixed by a stop tube 55. This configuration is generally used as a coupling mechanism that can rotate with each other. However, in a general rotatable coupling mechanism, rotation is regulated by providing a dowel 53. On the other hand, in the present embodiment, the rotation restriction mechanism is removed by not providing the rotation restriction portion (the dowel 53). Thereby, the connector part 5 and the 1st bending prevention part 7 can be freely rotated mutually over 360 degreeC or more.
The rotation mechanism is not limited to such an example, and a known rotation mechanism can be used.
The members 58 and 59 are covering portions provided on the outside of the tube.
回転機構としては、このような例に限定されることなく、公知の回転機構を用いることができる。
尚、部材58,59は、管の外側に設けた被覆部である。 A rotating
The rotation mechanism is not limited to such an example, and a known rotation mechanism can be used.
The
図5は、本実施の形態における内視鏡の一構成例を示す機能ブロック図である。図5では、第1の折れ止め部7とその近傍の屈曲部11との間における主として電気的な構成例を示す。
図5に示すように、本実施の形態による内視鏡は、ビデオプロセッサ1に接続されるコネクタ部5と、第1の折れ止め部7と、屈曲部11と、センサ61とが設けられている。上述のように、第1の折れ止め部7内には第1の基板21が設けられ、屈曲部11内には第2の基板41が設けられている。 FIG. 5 is a functional block diagram illustrating a configuration example of the endoscope according to the present embodiment. In FIG. 5, the example of an electrical structure mainly between the 1stbending prevention part 7 and the bending part 11 of the vicinity is shown.
As shown in FIG. 5, the endoscope according to the present embodiment is provided with aconnector portion 5 connected to the video processor 1, a first bend preventing portion 7, a bent portion 11, and a sensor 61. Yes. As described above, the first substrate 21 is provided in the first bend preventing portion 7, and the second substrate 41 is provided in the bent portion 11.
図5に示すように、本実施の形態による内視鏡は、ビデオプロセッサ1に接続されるコネクタ部5と、第1の折れ止め部7と、屈曲部11と、センサ61とが設けられている。上述のように、第1の折れ止め部7内には第1の基板21が設けられ、屈曲部11内には第2の基板41が設けられている。 FIG. 5 is a functional block diagram illustrating a configuration example of the endoscope according to the present embodiment. In FIG. 5, the example of an electrical structure mainly between the 1st
As shown in FIG. 5, the endoscope according to the present embodiment is provided with a
ビデオプロセッサ(コントローラ)1には、例えば、電源3と映像信号処理回路(FPGA)83とが設けられる。第1の折れ止め部7には、第1の基板21が設けられる。第1の基板21には、電源3からの電力を調整するレギュレータ21-2と、コイルC1を備えた送電IC21-1とが設けられている。さらに、光デバイス(フォトダイオード:PDなど)が受光し出力した電流を電圧信号に変換するためのTIA(トランスインピーダンスアンプ)、すなわち、電流を電圧に変換する変換素子TIA21-4と、光デバイス21-5(PD)が設けられている。尚、バッファ21-3は電圧信号を一時的に保存し、ビデオプロセッサ1側にある単位ごとに伝送する。例えば、1フレーム/1フィールドごとに信号を伝送する。
屈曲部11には、第2の基板41が設けられている。第2の基板41には、コイルC2を備えた受電IC41-1と、受電IC41-1からの電力を調整するレギュレータ41-2と、が設けられ、調整された受電電力がセンサ61に出力される。 The video processor (controller) 1 is provided with, for example, apower supply 3 and a video signal processing circuit (FPGA) 83. A first substrate 21 is provided in the first bend preventing part 7. The first substrate 21 is provided with a regulator 21-2 for adjusting power from the power source 3 and a power transmission IC 21-1 including a coil C1. Furthermore, a TIA (transimpedance amplifier) for converting a current received and output by an optical device (photodiode: PD) into a voltage signal, that is, a conversion element TIA21-4 for converting the current into a voltage, and the optical device 21 -5 (PD) is provided. The buffer 21-3 temporarily stores the voltage signal and transmits it for each unit on the video processor 1 side. For example, a signal is transmitted for each frame / field.
Thebent portion 11 is provided with a second substrate 41. The second substrate 41 is provided with a power receiving IC 41-1 having a coil C2 and a regulator 41-2 for adjusting the power from the power receiving IC 41-1, and the adjusted received power is output to the sensor 61. The
屈曲部11には、第2の基板41が設けられている。第2の基板41には、コイルC2を備えた受電IC41-1と、受電IC41-1からの電力を調整するレギュレータ41-2と、が設けられ、調整された受電電力がセンサ61に出力される。 The video processor (controller) 1 is provided with, for example, a
The
センサ61からの映像信号は、第2の基板41が設けられている信号補正回路41-3(EQ)と、映像信号駆動回路41-4(VCSELドライバ)、映像信号無線送信回路41-5(VCSEL)を介して、光デバイス21-5(PD)に送信される。
従って、電源3からの電力及びセンサ61からの映像信号は、第1の折れ止め部7と屈曲部11との間において、物理的な接続を持たない構成においても伝達させることができる。
従って、第1の折れ止め部7と屈曲部11との間で360度以上の回転を行う機械的機構を持たせつつ、電力と映像信号とを伝達させることができる。 The video signal from thesensor 61 includes a signal correction circuit 41-3 (EQ) provided with the second substrate 41, a video signal drive circuit 41-4 (VCSEL driver), and a video signal wireless transmission circuit 41-5 ( Via the VCSEL) to the optical device 21-5 (PD).
Therefore, the power from thepower source 3 and the video signal from the sensor 61 can be transmitted between the first anti-folding portion 7 and the bent portion 11 even in a configuration without physical connection.
Therefore, it is possible to transmit power and a video signal while providing a mechanical mechanism that rotates 360 degrees or more between the firstbend preventing portion 7 and the bent portion 11.
従って、電源3からの電力及びセンサ61からの映像信号は、第1の折れ止め部7と屈曲部11との間において、物理的な接続を持たない構成においても伝達させることができる。
従って、第1の折れ止め部7と屈曲部11との間で360度以上の回転を行う機械的機構を持たせつつ、電力と映像信号とを伝達させることができる。 The video signal from the
Therefore, the power from the
Therefore, it is possible to transmit power and a video signal while providing a mechanical mechanism that rotates 360 degrees or more between the first
以上のように、本実施の形態においては、以下のように動作させることができる。
1)折れ止め部(抑えゴム部(弾性部材))が360度以上回転可能な構造となる。
2)無線給電デバイスを折れ止め部内に配置し、回転位置に合わせて、送受信デバイス、コイルを配置することができる。
尚、無線給電方式は電磁誘導方式と磁気共鳴方式どちらでも良い。
3)光無線デバイスを折れ止め部内に配置し、回転させても通信デバイス面が合うように配置させる。
4)挿入部または把持操作部に光源を配置する。
5)無線給電による電力はセンサや光源の駆動電力に合わせデバイス、コイル等を変更できる。 As described above, this embodiment can be operated as follows.
1) A structure in which the anti-bending part (restraining rubber part (elastic member)) can rotate 360 degrees or more is obtained.
2) The wireless power feeding device can be arranged in the bend preventing part, and the transmitting / receiving device and the coil can be arranged in accordance with the rotational position.
The wireless power feeding method may be either an electromagnetic induction method or a magnetic resonance method.
3) The optical wireless device is arranged in the anti-bending portion, and arranged so that the communication device surface is aligned even if it is rotated.
4) A light source is arranged in the insertion part or the grip operation part.
5) The power by wireless power feeding can change the device, coil, etc. according to the driving power of the sensor and light source.
1)折れ止め部(抑えゴム部(弾性部材))が360度以上回転可能な構造となる。
2)無線給電デバイスを折れ止め部内に配置し、回転位置に合わせて、送受信デバイス、コイルを配置することができる。
尚、無線給電方式は電磁誘導方式と磁気共鳴方式どちらでも良い。
3)光無線デバイスを折れ止め部内に配置し、回転させても通信デバイス面が合うように配置させる。
4)挿入部または把持操作部に光源を配置する。
5)無線給電による電力はセンサや光源の駆動電力に合わせデバイス、コイル等を変更できる。 As described above, this embodiment can be operated as follows.
1) A structure in which the anti-bending part (restraining rubber part (elastic member)) can rotate 360 degrees or more is obtained.
2) The wireless power feeding device can be arranged in the bend preventing part, and the transmitting / receiving device and the coil can be arranged in accordance with the rotational position.
The wireless power feeding method may be either an electromagnetic induction method or a magnetic resonance method.
3) The optical wireless device is arranged in the anti-bending portion, and arranged so that the communication device surface is aligned even if it is rotated.
4) A light source is arranged in the insertion part or the grip operation part.
5) The power by wireless power feeding can change the device, coil, etc. according to the driving power of the sensor and light source.
そして、以下のような利点を提供することができる。
1)内視鏡手技において、挿入部を回転させることにより、後段可撓管に余分なテンションがかかることを回避することができる。
2)センサまたは光源等の駆動電力は、屈曲部とコネクタ部の間に配置された第1の折れ止め部で、送信側と受信側とを分離した無線給電用コイルで有線ケーブル無しに伝送することが出来る。従って、可撓管に余分なテンションがかかっても、センサまたは光源は適切に駆動できるようになる。また、センサからのセンサ信号も、屈曲部とコネクタ部の間において有線ケーブル無しに伝送することができる。従って、可撓管に余分なテンションがかかっても、センサからの信号をコントローラ側に適切に伝送することができる。
尚、同様の構成を、挿入側の第2の折れ止め部17においても適用することができる。 And the following advantages can be provided.
1) In the endoscopic procedure, by rotating the insertion portion, it is possible to avoid applying excessive tension to the rear flexible tube.
2) Driving power of a sensor or light source is transmitted without a wired cable by a wireless power feeding coil in which a transmitting side and a receiving side are separated by a first bend portion disposed between a bent portion and a connector portion. I can do it. Therefore, even if an extra tension is applied to the flexible tube, the sensor or the light source can be driven appropriately. Further, a sensor signal from the sensor can also be transmitted without a wired cable between the bent portion and the connector portion. Therefore, even if excessive tension is applied to the flexible tube, the signal from the sensor can be appropriately transmitted to the controller side.
Note that the same configuration can be applied to the secondanti-bending portion 17 on the insertion side.
1)内視鏡手技において、挿入部を回転させることにより、後段可撓管に余分なテンションがかかることを回避することができる。
2)センサまたは光源等の駆動電力は、屈曲部とコネクタ部の間に配置された第1の折れ止め部で、送信側と受信側とを分離した無線給電用コイルで有線ケーブル無しに伝送することが出来る。従って、可撓管に余分なテンションがかかっても、センサまたは光源は適切に駆動できるようになる。また、センサからのセンサ信号も、屈曲部とコネクタ部の間において有線ケーブル無しに伝送することができる。従って、可撓管に余分なテンションがかかっても、センサからの信号をコントローラ側に適切に伝送することができる。
尚、同様の構成を、挿入側の第2の折れ止め部17においても適用することができる。 And the following advantages can be provided.
1) In the endoscopic procedure, by rotating the insertion portion, it is possible to avoid applying excessive tension to the rear flexible tube.
2) Driving power of a sensor or light source is transmitted without a wired cable by a wireless power feeding coil in which a transmitting side and a receiving side are separated by a first bend portion disposed between a bent portion and a connector portion. I can do it. Therefore, even if an extra tension is applied to the flexible tube, the sensor or the light source can be driven appropriately. Further, a sensor signal from the sensor can also be transmitted without a wired cable between the bent portion and the connector portion. Therefore, even if excessive tension is applied to the flexible tube, the signal from the sensor can be appropriately transmitted to the controller side.
Note that the same configuration can be applied to the second
上記の実施の形態において、図示されている構成等については、これらに限定されるものではなく、本開示の効果を発揮する範囲内で適宜変更することが可能である。その他、本開示の目的の範囲を逸脱しない限りにおいて適宜変更して実施することが可能である。
例えば、無線給電や光無線通信用の部品は、機械的に分離された両側のいずれかにそれぞれ配置すれば良く、実施の形態や図面に示された配置位置に限定するものではない。
また、本開示の各構成要素は、任意に取捨選択することができ、取捨選択した構成も本技術に含まれるものである。 In the above-described embodiment, the illustrated configuration and the like are not limited to these, and can be changed as appropriate within the scope of the effects of the present disclosure. Other modifications may be made as appropriate without departing from the scope of the object of the present disclosure.
For example, the components for wireless power feeding and optical wireless communication may be arranged on either one of both sides mechanically separated, and are not limited to the arrangement positions shown in the embodiments and drawings.
Moreover, each component of this indication can be selected arbitrarily, and the selected structure is also contained in this technique.
例えば、無線給電や光無線通信用の部品は、機械的に分離された両側のいずれかにそれぞれ配置すれば良く、実施の形態や図面に示された配置位置に限定するものではない。
また、本開示の各構成要素は、任意に取捨選択することができ、取捨選択した構成も本技術に含まれるものである。 In the above-described embodiment, the illustrated configuration and the like are not limited to these, and can be changed as appropriate within the scope of the effects of the present disclosure. Other modifications may be made as appropriate without departing from the scope of the object of the present disclosure.
For example, the components for wireless power feeding and optical wireless communication may be arranged on either one of both sides mechanically separated, and are not limited to the arrangement positions shown in the embodiments and drawings.
Moreover, each component of this indication can be selected arbitrarily, and the selected structure is also contained in this technique.
本開示は、内視鏡に利用可能である。
This disclosure can be used for endoscopes.
A 内視鏡(システム)
C1,C2 無線給電用コイル
1 ビデオプロセッサ
3 電源
5 コネクタ部
5a コネクタ端子
12 挿入部
15 把持操作部(操作部)
16 ユニバーサルチューブ
21 第1の基板
23 第1の無線給電用デバイス
31,33 光無線デバイス
41 第2の基板
43 第2の無線給電用デバイス
51 回転管
55 止め管
57 連結管
58,59 被覆部
61 センサ(固体撮像素子)
63 光源 A Endoscope (system)
C1, C2 Wireless power supply coil 1Video processor 3 Power supply 5 Connector part 5a Connector terminal 12 Insertion part 15 Grasping operation part (operation part)
16Universal tube 21 First substrate 23 First wireless power supply device 31, 33 Optical wireless device 41 Second substrate 43 Second wireless power supply device 51 Rotating tube 55 Stop tube 57 Connecting tube 58, 59 Cover 61 Sensor (solid-state image sensor)
63 Light source
C1,C2 無線給電用コイル
1 ビデオプロセッサ
3 電源
5 コネクタ部
5a コネクタ端子
12 挿入部
15 把持操作部(操作部)
16 ユニバーサルチューブ
21 第1の基板
23 第1の無線給電用デバイス
31,33 光無線デバイス
41 第2の基板
43 第2の無線給電用デバイス
51 回転管
55 止め管
57 連結管
58,59 被覆部
61 センサ(固体撮像素子)
63 光源 A Endoscope (system)
C1, C2 Wireless power supply coil 1
16
63 Light source
Claims (9)
- 電源を備えたコントローラに接続されるコネクタ部と、前記コネクタ部に接続される操作部と、被険部位に挿入される挿入部とを有し、前記コネクタ部の前記操作部側に前記コネクタ部から順番に折れ止め部と屈曲部とが設けられている内視鏡であって、
前記折れ止め部と前記屈曲部とを回転可能とする回転機構を有し、
前記コネクタ部内に設けられた第1の基板には前記電源からの電力を伝送する第1の無線給電用デバイスが設けられ、
前記屈曲部内に設けられた第2の基板には、前記第1の無線給電用デバイスから無線により伝送された電力を受け取る第2の無線給電用デバイスが設けられ、前記第2の無線給電用デバイスからの電力が前記挿入部に設けられたセンサに供給される内視鏡。 A connector portion connected to a controller having a power source; an operation portion connected to the connector portion; and an insertion portion inserted into a to-be-tested portion; and the connector portion on the operation portion side of the connector portion An endoscope in which a folding part and a bent part are provided in order,
A rotation mechanism that enables rotation of the bend preventing portion and the bent portion;
The first board provided in the connector portion is provided with a first wireless power feeding device that transmits power from the power source,
The second substrate provided in the bent portion is provided with a second wireless power feeding device that receives power transmitted wirelessly from the first wireless power feeding device, and the second wireless power feeding device. An endoscope in which electric power from is supplied to a sensor provided in the insertion portion. - 前記第1の無線給電用デバイスは、第1のコイルに接続され、
前記第2の無線給電用デバイスは、第2のコイルに接続され、
前記第1のコイルと前記第2のコイルとは、回転軸方向に沿って近接して対向配置されている請求項1に記載の内視鏡。 The first wireless power feeding device is connected to a first coil;
The second wireless power feeding device is connected to a second coil;
The endoscope according to claim 1, wherein the first coil and the second coil are disposed to face each other in the vicinity along the rotation axis direction. - 前記挿入部には光源が設けられ、
前記第2の無線給電用デバイスからの電力が前記挿入部に設けられた前記光源に供給される請求項1又は2に記載の内視鏡。 The insertion portion is provided with a light source,
The endoscope according to claim 1 or 2, wherein electric power from the second wireless power feeding device is supplied to the light source provided in the insertion portion. - 前記折れ止め部には、第1の光無線デバイスが設けられ、
前記屈曲部には、第2の光無線デバイスが設けられ、
前記センサからのセンシング信号を光通信により伝達する請求項1から3までのいずれか1項に記載の内視鏡。 The anti-bending portion is provided with a first optical wireless device,
The bent portion is provided with a second optical wireless device,
The endoscope according to any one of claims 1 to 3, wherein a sensing signal from the sensor is transmitted by optical communication. - 前記回転機構は、回転可能角度が360度以上である請求項1から4までのいずれか1項に記載の内視鏡。 The endoscope according to any one of claims 1 to 4, wherein the rotation mechanism has a rotatable angle of 360 degrees or more.
- 前記折れ止め部は、弾性部材により形成されている請求項1から5までのいずれか1項に記載の内視鏡。 The endoscope according to any one of claims 1 to 5, wherein the bend preventing portion is formed of an elastic member.
- 前記センサは、固体撮像素子である請求項1から6までのいずれか1項に記載の内視鏡。 The endoscope according to any one of claims 1 to 6, wherein the sensor is a solid-state imaging device.
- 前記第1の基板又は前記第2の基板の少なくともいずれか一方に、前記電源から前記センサに供給する電力を調整するレギュレータを有する請求項1から7までのいずれか1項に記載の内視鏡。 The endoscope according to any one of claims 1 to 7, further comprising a regulator that adjusts power supplied from the power source to the sensor on at least one of the first substrate and the second substrate. .
- 前記屈曲部は可撓管により形成されている請求項1から8までのいずれか1項に記載の内視鏡。 The endoscope according to any one of claims 1 to 8, wherein the bent portion is formed of a flexible tube.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018080109A JP6845826B2 (en) | 2018-04-18 | 2018-04-18 | Endoscope |
| JP2018-080109 | 2018-04-18 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2019203293A1 true WO2019203293A1 (en) | 2019-10-24 |
Family
ID=68240066
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2019/016561 WO2019203293A1 (en) | 2018-04-18 | 2019-04-18 | Endoscope |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP6845826B2 (en) |
| WO (1) | WO2019203293A1 (en) |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2010122770A1 (en) * | 2009-04-21 | 2010-10-28 | オリンパス株式会社 | Endoscope system |
| JP2017006218A (en) * | 2015-06-17 | 2017-01-12 | 富士フイルム株式会社 | connector |
| JP2017018502A (en) * | 2015-07-14 | 2017-01-26 | 富士フイルム株式会社 | Connector and endoscope system |
-
2018
- 2018-04-18 JP JP2018080109A patent/JP6845826B2/en active Active
-
2019
- 2019-04-18 WO PCT/JP2019/016561 patent/WO2019203293A1/en active Application Filing
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2010122770A1 (en) * | 2009-04-21 | 2010-10-28 | オリンパス株式会社 | Endoscope system |
| JP2017006218A (en) * | 2015-06-17 | 2017-01-12 | 富士フイルム株式会社 | connector |
| JP2017018502A (en) * | 2015-07-14 | 2017-01-26 | 富士フイルム株式会社 | Connector and endoscope system |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2019187516A (en) | 2019-10-31 |
| JP6845826B2 (en) | 2021-03-24 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US11547280B2 (en) | Rotatable and detachable electrical coupling point | |
| JP4648591B2 (en) | Electronic endoscope and connecting cable | |
| JP5704878B2 (en) | Photoelectric conversion connector, optical transmission module, imaging device, and endoscope | |
| EP2110069B1 (en) | Image pickup apparatus | |
| US10463231B2 (en) | Endoscope | |
| US10499799B2 (en) | Image pickup unit and endoscope | |
| JP5978238B2 (en) | Electronic endoscope and electronic endoscope apparatus | |
| US10194786B2 (en) | Insertion device | |
| CN110393499A (en) | Fujinon electronic video endoscope and electronic endoscope system | |
| US11857166B2 (en) | Imaging unit and endoscope | |
| WO2019203293A1 (en) | Endoscope | |
| WO2018020721A1 (en) | Endoscope system | |
| JP3831273B2 (en) | Electronic endoscope | |
| JP4303053B2 (en) | Capsule endoscope guidance system | |
| WO2014195843A2 (en) | Endoscopic/boroscopic instrument with wireless transmission and charging module | |
| JP2011200338A (en) | Electronic endoscope | |
| US20220296089A1 (en) | Endoscope, distal end portion of endoscope, and insertion portion of endoscope | |
| JPH0445693Y2 (en) | ||
| US20230346209A1 (en) | Insertion device | |
| JP4127794B2 (en) | Endoscope | |
| US10080480B2 (en) | Endoscope | |
| JP6664943B2 (en) | Endoscope system and information processing device | |
| JP3679758B2 (en) | Electronic endoscope | |
| JP2003038430A (en) | Electronic endoscope and connecting cable | |
| JPH11326784A (en) | Stereoscopic endoscope apparatus |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 19788627 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 19788627 Country of ref document: EP Kind code of ref document: A1 |