WO2019093504A1 - ドローンを操作するための端末、方法及びそのためのプログラム - Google Patents
ドローンを操作するための端末、方法及びそのためのプログラム Download PDFInfo
- Publication number
- WO2019093504A1 WO2019093504A1 PCT/JP2018/041763 JP2018041763W WO2019093504A1 WO 2019093504 A1 WO2019093504 A1 WO 2019093504A1 JP 2018041763 W JP2018041763 W JP 2018041763W WO 2019093504 A1 WO2019093504 A1 WO 2019093504A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- drone
- terminal
- flight
- altitude
- display screen
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Ceased
Links
Images







Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64C—AEROPLANES; HELICOPTERS
- B64C13/00—Control systems or transmitting systems for actuating flying-control surfaces, lift-increasing flaps, air brakes, or spoilers
- B64C13/02—Initiating means
- B64C13/16—Initiating means actuated automatically, e.g. responsive to gust detectors
- B64C13/20—Initiating means actuated automatically, e.g. responsive to gust detectors using radiated signals
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U10/00—Type of UAV
- B64U10/10—Rotorcrafts
- B64U10/13—Flying platforms
- B64U10/14—Flying platforms with four distinct rotor axes, e.g. quadcopters
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U2101/00—UAVs specially adapted for particular uses or applications
- B64U2101/30—UAVs specially adapted for particular uses or applications for imaging, photography or videography
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U2201/00—UAVs characterised by their flight controls
- B64U2201/20—Remote controls
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B64—AIRCRAFT; AVIATION; COSMONAUTICS
- B64U—UNMANNED AERIAL VEHICLES [UAV]; EQUIPMENT THEREFOR
- B64U30/00—Means for producing lift; Empennages; Arrangements thereof
- B64U30/20—Rotors; Rotor supports
Definitions
- the present invention relates to a terminal for operating a drone, a method and a program for the same.
- the roof construction contractor who received an estimate request for roof construction climbs on the roof and measures the area and observes the condition of the roofing materials such as tiles. I do.
- the number of roof renovations of houses in Japan is said to be tens of thousands a year, and estimates of at least this number have been made, and although it is acceptable if orders will be reached, it may fall back to the roof in situations where orders may not be accepted. Under the present circumstances, we have no choice but to carry out work at risk of accidents.
- the present invention has been made in view of such problems, and an object thereof is to provide a terminal, a method, and a program for performing a roof survey without a person climbing on the roof.
- a first aspect of the present invention is a method for operating the drone from a terminal via a control device in communication with the drone, the terminal having the touch panel Receiving from the formula display screen the selection of the flight altitude of the drone; and receiving from the touch panel display screen an input instructing the takeoff of the drone, the terminal to the drone Sending a takeoff order instructing the flight at the flight altitude via the steering device, wherein an altitude change instruction can be sent during the drone flight to change the flight altitude of the drone It is characterized by
- the takeoff command does not include a path of horizontal movement of the drone.
- the terminal receives an input instructing landing of the drone from the touch panel display screen, and the terminal receives the drone And transmitting a landing command instructing landing via the steering device, wherein a pause command for the drone can be transmitted during the landing operation of the drone.
- the input includes an input of a landing point.
- a fifth aspect of the present invention is a program for causing a terminal to execute a method for operating the drone from the terminal via a control device that communicates with the drone, the method comprising the steps of: The terminal receiving from the touch panel display screen the selection of the flight altitude of the drone, the terminal receiving from the touch panel display screen an input instructing takeoff of the drone, the terminal Sending a takeoff command to the drone to direct the flight at the flight altitude through the maneuvering device, the altitude change command for changing the flight altitude of the drone during the flight of the drone It is characterized in that it can be transmitted.
- a sixth aspect of the present invention is a terminal for operating the drone through a pilot device in communication with the drone, wherein the selection of the flight altitude of the drone and the touch panel display screen of the terminal and An altitude change command for receiving an input instructing takeoff of the drone and transmitting a takeoff command instructing the drone to fly at the flight altitude through the control device, and changing the flight altitude of the drone Can be transmitted during the flight of the drone.
- a seventh aspect of the present invention is a device comprising a drone, a piloting device for piloting the drone, and a terminal attached to the piloting device, wherein the terminal is a touch panel type of the terminal
- the display screen receives the selection of the flight altitude of the drone and the input instructing the takeoff of the drone, and transmits the takeoff command instructing the drone to fly at the flight altitude through the control device, An altitude change command for changing a drone's flight altitude can be transmitted during the drone flight.
- the drone has a plurality of rotors and a motor for driving each of the plurality of rotors, detects inclination during flight, and determines wind from the inclination. It is characterized by weakening the upper motor and strengthening the leeward motor.
- the drone determines the number of rotations of each motor in accordance with GPS data by the GPS module or imaging data by the camera.
- a tenth aspect of the present invention is a method for operating the drone from a terminal communicating with a drone, wherein the terminal receives the selection of the flight altitude of the drone from the touch panel display screen.
- the terminal receives an input instructing takeoff of the drone from the touch panel display screen, and the terminal transmits a takeoff instruction instructing flight of the flight altitude to the drone. And changing the altitude of the drone to change the altitude of the drone during the flight of the drone.
- the purpose of the roof survey is to steer the drone which is not always easy by letting the operator designate only the vertical movement without the horizontal movement of the drone. Can be done well with
- FIG. 1 shows an apparatus for performing a roof survey according to an embodiment of the present invention.
- FIG. 5 illustrates a method for performing a roof survey according to an embodiment of the present invention. It is an example of the display screen of the radio
- FIG. 1 shows an apparatus or system according to a first embodiment of the present invention.
- the device 100 comprises a drone 110, a steering device 120 for steering the drone 110, and a terminal 130 attached to the steering device 120.
- the terminal 130 is connected to the control device 120 by wire or wirelessly.
- the control device 120 generally has two sticks, and the drone 110 can be instructed to perform an operation corresponding to each operation by tilting the sticks vertically and horizontally.
- the terminal 130 has a display screen 131, and by using the display screen 131 as a touch panel, the operator can intuitively operate the terminal 130 from the terminal 130 without directly operating the control device 120, which is not always easy to operate. It can be carried out.
- drone shall mean an unmanned aerial vehicle flying by rotating a propeller or a rotor.
- the terminal 130 can be a portable wireless terminal device, and includes a communication unit 130A such as a communication interface, a processing unit 130B such as a processor or CPU, and a storage unit 130C including a storage device or storage medium such as a memory or a hard disk. Each function described below can be realized by executing a program for performing each process. Further, the program may include one or more programs, and may be recorded on a computer readable storage medium to be a non-transitory program product.
- the communication unit 130A, the processing unit 130B, and the storage unit 130C disposed in the housing of the drone 110 are illustrated by dotted lines, and the drone 110 and the steering device 120 have similar configurations although not illustrated.
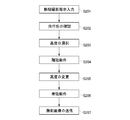
- FIG. 2 shows a flow of a method for conducting a roof survey according to the first embodiment of the present invention.
- an application installed on a terminal 130 such as a tablet is activated, and login is performed as necessary, and as shown in FIG. 3, a “new imaging” button is tapped to perform imaging (S201).
- a confirmation screen before flight as shown in FIG. 4 is displayed on the display screen 131 (S202), and confirmation of settings, states, etc. which are obtained prior to the flight of the drone 110 is performed. Furthermore, confirmation as shown in FIG. 5 may be performed.
- the altitude at which the drone 110 is to fly is selected (S203). From the viewpoint of the terminal 130, the selection of the flying height of the drone 110 is received from the touch panel display screen 131. Although the height from the ground is selected in FIG. 6, the height from any position of the roof to be investigated and the height from the roof position may be selected separately. Further, as indicated by "Please charge the battery", an alert may be displayed when a change occurs in the setting / state which is the premise of the flight. In the present embodiment, although described later, the altitude can be changed after takeoff.
- the drone 110 takes off after reconfirming whether or not there is a change in the setting / state etc. (S204). From the viewpoint of the terminal 130, an input instructing takeoff of the drone 110 is received from the touch panel display screen 131.
- the display screen 131 of the terminal 130 displays the image of the camera possessed by the drone 110, and further captures an image of the roof by tapping the camera icon at an arbitrary timing or the like. be able to.
- the thumbnail of the captured image can be displayed, for example, at the lower right of the display screen 131.
- the drone 110 rises upward from the takeoff point. I will shoot the area including the roof.
- the display screen 131 for example, by dragging the image with a finger or the like on the display screen 131, it is possible to arrange the roof to be surveyed near the center of the display screen 131 as shown in FIG.
- a camera is installed downward on the drone 110, and the terminal 130 detects this by moving one or more fingers on the display screen 131, and the drone 110 operates the camera according to the detection result. It can also be ordered.
- the rotation with the rotation axis in the vertical direction and the rotation with the rotation axis in the horizontal direction can be mentioned as the camera operation.
- the camera does not have to be downward necessarily, and it may be possible to shoot downward.
- the change of the altitude (S205) may be performed by a pull-down menu as shown in FIG. 7 or may be performed again by displaying the altitude selection screen shown in FIG.
- the change of altitude is performed by transmitting an altitude change command from the terminal 130 to the drone 110 via the control device 120.
- preparation for landing is started by tapping the "preparation for landing” button as shown in FIG. Specifically, as shown in FIG. 8, a landing point is selected, and then a landing operation is started by tapping a "land” button (S206). From the viewpoint of the terminal 130, an input instructing landing of the drone 110 is received from the touch panel display screen 131, and a landing instruction instructing landing is transmitted to the drone 110 via the control device 120.
- the image captured by the drone 110 is directly or indirectly transmitted to the control device 120 or the terminal 130 (S207) to allow the terminal 130 to view.
- the data may be stored in a memory of the drone 110, a storage medium such as a hard disk, or a storage device.
- a storage medium such as a hard disk, or a storage device.
- the drone 110 it is not always easy for the drone 110 not to be easy by letting the operator designate only vertical movement without horizontal movement of the drone 110.
- the maneuvering can be carried out sufficiently for the purpose of roof research, even for inexperienced persons. For example, if the roof height to be surveyed is given a sufficient height, such as 10 m, 15 m, 30 m, it is possible to photograph the entire roof to be surveyed without the need for horizontal movement.
- the operation can be performed intuitively from the terminal 130 by the GUI instead of directly operating the control device 120, so that even a less experienced person can perform a reliable operation.
- a house has been described as an example, but the present invention is also applicable to a factory, a warehouse, and the like.
- the height of the roof to be surveyed is 10 m and it is often appropriate to shoot from a height of 10 to 30 m from any position on the roof, the height of the set height from the ground is 20 to 40 m It is thought that it will increase.
- the drone 110 may move horizontally due to the wind during flight.
- the drone 110 is provided with a gyro sensor, the wind direction is determined from the inclination of the drone 110, and the drone 110 controls a plurality of rotors and motors as shown in FIG. If it has, as an example, weaken the upwind motor and strengthen the downwind motor.
- the drone 110 may detect the wind force directly or indirectly in addition to the wind direction, and determine the number of revolutions of each motor according to the wind force so as to suppress horizontal movement. It is also possible to confirm that horizontal movement is suppressed based on GPS data, and to confirm suppression of horizontal movement based on shooting data captured by a camera.
- the number of rotations of each motor may be determined according to GPS data by the GPS module or imaging data by the camera or deviation thereof.
- each method, program, terminal, device, server or system may have aspects that perform operations different from the operations described in the present specification.
- the aspect is directed to the same operation as any of the operations described herein, and the existence of an operation different from the operations described herein means that the respective methods of the present invention It is added that it is not out of the scope of the embodiment.
- the drone 110 is operated by the control device 120, but the drone or multicopter is not a control device having a stick but a wireless terminal from a portable terminal such as a tablet or a smartphone Some are directly operable by communication.
- the terminal 130 can perform wireless communication directly with the drone 110 in the description of the first embodiment.
Landscapes
- Engineering & Computer Science (AREA)
- Automation & Control Theory (AREA)
- Aviation & Aerospace Engineering (AREA)
- Control Of Position, Course, Altitude, Or Attitude Of Moving Bodies (AREA)
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2017-216441 | 2017-11-09 | ||
| JP2017216441A JP7023085B2 (ja) | 2017-11-09 | 2017-11-09 | ドローンを操作するための端末、方法及びそのためのプログラム |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2019093504A1 true WO2019093504A1 (ja) | 2019-05-16 |
Family
ID=66439200
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2018/041763 Ceased WO2019093504A1 (ja) | 2017-11-09 | 2018-11-09 | ドローンを操作するための端末、方法及びそのためのプログラム |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP7023085B2 (enExample) |
| WO (1) | WO2019093504A1 (enExample) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2020262222A1 (ja) * | 2019-06-24 | 2020-12-30 | 株式会社Clue | 飛行体の制御システム |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN112840315B (zh) | 2019-07-26 | 2022-11-01 | Lc创作股份制有限责任公司 | Gui控制器设计支持装置、远程控制系统和程序 |
| US11249732B2 (en) | 2019-07-26 | 2022-02-15 | Lc-Studio Corporation | GUI controller design support device, system for remote control and program |
| JP7363733B2 (ja) * | 2020-09-30 | 2023-10-18 | トヨタ自動車株式会社 | 端末プログラム、無人航空機、及び情報処理装置 |
Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016535879A (ja) * | 2014-05-30 | 2016-11-17 | エスゼット ディージェイアイ テクノロジー カンパニー リミテッドSz Dji Technology Co.,Ltd | Uavドッキングのためのシステムおよび方法 |
| JP2017138162A (ja) * | 2016-02-02 | 2017-08-10 | Jfe鋼板株式会社 | 構造物の点検システムおよび点検方法 |
-
2017
- 2017-11-09 JP JP2017216441A patent/JP7023085B2/ja active Active
-
2018
- 2018-11-09 WO PCT/JP2018/041763 patent/WO2019093504A1/ja not_active Ceased
Patent Citations (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2016535879A (ja) * | 2014-05-30 | 2016-11-17 | エスゼット ディージェイアイ テクノロジー カンパニー リミテッドSz Dji Technology Co.,Ltd | Uavドッキングのためのシステムおよび方法 |
| JP2017138162A (ja) * | 2016-02-02 | 2017-08-10 | Jfe鋼板株式会社 | 構造物の点検システムおよび点検方法 |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2020262222A1 (ja) * | 2019-06-24 | 2020-12-30 | 株式会社Clue | 飛行体の制御システム |
Also Published As
| Publication number | Publication date |
|---|---|
| JP2019085041A (ja) | 2019-06-06 |
| JP7023085B2 (ja) | 2022-02-21 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10156854B2 (en) | UAV and UAV landing control device and method | |
| US10712739B1 (en) | Feedback to facilitate control of unmanned aerial vehicles (UAVs) | |
| US20250045949A1 (en) | Uav control method, device and uav | |
| CN114397903B (zh) | 一种导航处理方法及控制设备 | |
| WO2019093504A1 (ja) | ドローンを操作するための端末、方法及びそのためのプログラム | |
| CN110226141A (zh) | 用于无人驾驶飞行器的操作的安全系统 | |
| WO2018098784A1 (zh) | 无人机的控制方法、装置、设备和无人机的控制系统 | |
| WO2017024760A1 (zh) | 一种手持无人机回收的方法、装置及无人机 | |
| US20190243356A1 (en) | Method for controlling flight of an aircraft, device, and aircraft | |
| CN110119154A (zh) | 飞行器的控制方法、装置和设备以及飞行器 | |
| CN113625759A (zh) | 一种无人机迫降控制方法及装置、遥控装置和存储介质 | |
| JP6515367B1 (ja) | 撮像システム及び撮像方法 | |
| CN106586011A (zh) | 航拍无人飞行器的对准方法及其航拍无人飞行器 | |
| US20200382696A1 (en) | Selfie aerial camera device | |
| JP2025016555A (ja) | 位置算出方法及び情報処理システム | |
| US20240019873A1 (en) | Unmanned aerial vehicle, control terminal, aircraft rescue method, and aircraft rescue system | |
| CN110771137A (zh) | 延时拍摄控制方法和设备 | |
| CN110832420A (zh) | 无人机的控制方法、装置和无人机 | |
| WO2019104684A1 (zh) | 无人机的控制方法、装置和系统 | |
| WO2021223176A1 (zh) | 无人机的控制方法和设备 | |
| US20230033760A1 (en) | Aerial Camera Device, Systems, and Methods | |
| JP2020071863A (ja) | 撮像システム及び撮像方法 | |
| JP2020070006A (ja) | 撮像システム及び撮像方法 | |
| JP2020072465A (ja) | 撮像システム及び撮像方法 | |
| JP6737521B2 (ja) | 高さ位置取得システム及び撮像システム、高さ位置取得方法、撮像方法 |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 18875652 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 18875652 Country of ref document: EP Kind code of ref document: A1 |