WO2019092811A1 - Work evaluation system and work evaluation method - Google Patents
Work evaluation system and work evaluation method Download PDFInfo
- Publication number
- WO2019092811A1 WO2019092811A1 PCT/JP2017/040276 JP2017040276W WO2019092811A1 WO 2019092811 A1 WO2019092811 A1 WO 2019092811A1 JP 2017040276 W JP2017040276 W JP 2017040276W WO 2019092811 A1 WO2019092811 A1 WO 2019092811A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- work
- position information
- time
- site
- data
- Prior art date
Links
Images


















Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q10/00—Administration; Management
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06Q—INFORMATION AND COMMUNICATION TECHNOLOGY [ICT] SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES; SYSTEMS OR METHODS SPECIALLY ADAPTED FOR ADMINISTRATIVE, COMMERCIAL, FINANCIAL, MANAGERIAL OR SUPERVISORY PURPOSES, NOT OTHERWISE PROVIDED FOR
- G06Q50/00—Systems or methods specially adapted for specific business sectors, e.g. utilities or tourism
- G06Q50/10—Services
Definitions
- the present invention relates to techniques for evaluating work.
- Patent Document 1 discloses the following work management system.
- Work information (a torque value of a tightening tool, etc.) is acquired from a tool used in work on a work object.
- Positioning data is acquired from a GPS receiver.
- GPS is an abbreviation of Global Positioning System.
- Work target information is read from the work target.
- the work target information is information for specifying a work target.
- the work target information is collated with the database, and the work content information and position information of the work target are acquired from the database.
- the work information obtained from the tool is compared with the work content information obtained from the database, and the positioning data obtained from the GPS receiver is compared with the position information obtained from the database. Then, the quality of the work is determined based on the comparison result.
- IC is an abbreviation for Integrated Circuit.
- Patent Document 1 The work management system disclosed in Patent Document 1 is referred to as a conventional work management system.
- a conventional work management system When a conventional work management system is introduced to a site where work objects are diverse or a site that has already been constructed, it takes time and effort to newly attach a bar code or an IC tag to each work object. Therefore, there is a problem that the conventional work management system is not easy to introduce.
- An object of the present invention is to enable evaluation of work without attaching a bar code or an IC tag to each work target.
- the work evaluation system of the present invention comprises a portable terminal and a work evaluation device.
- the portable terminal is A display unit that displays a result input field associated with a site identifier and in which a work result is input; And a work data generation unit for generating work data including the site identifier when the result input field is selected.
- the work evaluation device is A site data acquisition unit that acquires site data corresponding to a site identifier included in the operation data from a site database having site data including standard position information for each site identifier; A work position calculation unit that calculates work position information indicating a position of the mobile terminal at a work time; And a work position determination unit that determines the suitability of the work position information based on standard position information included in the acquired site data.
- the propriety of the work position information is determined based on the site identifier associated with the result input field. Therefore, work can be evaluated without attaching a bar code or an IC tag to each work target.
- FIG. 1 is a configuration diagram of a task evaluation system 100 according to a first embodiment.
- FIG. 2 is a block diagram of a portable terminal 200 according to Embodiment 1.
- FIG. 2 is a block diagram of a task evaluation device 300 according to the first embodiment.
- 6 is a flowchart of a work evaluation method according to Embodiment 1.
- 10 is a flowchart of work data acquisition processing (S110) according to the first embodiment.
- 10 is a flowchart of work position calculation processing (S120) in the first embodiment.
- 6 is a flowchart of field data acquisition processing (S130) according to the first embodiment.
- 6 is a flowchart of work position determination processing (S140) according to the first embodiment.
- 6 is a flowchart of warning processing (S150) in the first embodiment.
- FIG. 1 is a configuration diagram of a task evaluation system 100 according to a first embodiment.
- FIG. 2 is a block diagram of a portable terminal 200 according to Embodiment 1.
- FIG. 8 is a block diagram of a task evaluation system 100 according to a second embodiment.
- FIG. 7 is a block diagram of a task evaluation device 300 according to a second embodiment.
- 6 is a flowchart of a work evaluation method in Embodiment 2;
- 10 is a flowchart of work time determination (S200) in the second embodiment.
- 10 is a flowchart of standard time calculation processing (S220) in the second embodiment.
- 10 is a flowchart of work time determination processing (S230) in the second embodiment.
- 10 is a flowchart of a warning process (S160) according to the second embodiment.
- 10 is a flowchart of a task evaluation method in Embodiment 3.
- 15 is a flowchart of work data acquisition processing (S310) according to the third embodiment.
- FIG. 15 is a flowchart of warning processing (S350) in the third embodiment.
- FIG. 10 is a block diagram of a task evaluation system 100 according to a fourth embodiment.
- FIG. 14 is a block diagram of a management device 400 according to a fourth embodiment.
- FIG. 16 is a block diagram of a task evaluation device 300 according to a fourth embodiment.
- 15 is a flowchart of a task evaluation method in Embodiment 4; 17 is a flowchart of determination result notification processing (S460) in the fourth embodiment.
- the hardware block diagram of the portable terminal 200 in embodiment.
- the hardware block diagram of the work evaluation apparatus 300 in embodiment.
- the hardware block diagram of the management apparatus 400 in embodiment.
- Embodiment 1 An embodiment for determining the suitability of the work position will be described based on FIGS. 1 to 9.
- the work evaluation system 100 is a system for evaluating the work performed by the worker 101.
- the work evaluation system 100 includes a portable terminal 200, a work evaluation apparatus 300, and a data server 110.
- the portable terminal 200, the work evaluation apparatus 300 and the data server 110 communicate with each other via the network 109.
- the network 109 is an internet connection.
- the worker 101 performs work. For example, the worker 101 performs operations such as inspection of equipment, adjustment of tightening of screws and bolts, adjustment of sensitivity of sensor, and the like.
- the portable terminal 200 is possessed by the worker 101 at the work site.
- the mobile terminal 200 is a smartphone, a tablet computer, or a dedicated terminal.
- the work evaluation apparatus 300 evaluates the work performed by the worker 101.
- the data server 110 stores a site database 111 described later.
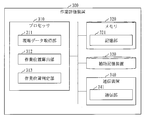
- the configuration of the mobile terminal 200 will be described based on FIG.
- the portable terminal 200 is a computer including hardware such as a processor 210, a memory 220, an auxiliary storage device 230, a sensor 240, a communication device 250, and an input / output device 260. These pieces of hardware are connected to each other via signal lines.
- the processor 210 is an IC (Integrated Circuit) that performs arithmetic processing, and controls other hardware.
- the processor 210 is a central processing unit (CPU), a digital signal processor (DSP), or a graphics processing unit (GPU).
- the memory 220 is a volatile storage device.
- the memory 220 is also referred to as a main storage device or a main memory.
- the memory 220 is a random access memory (RAM).
- the data stored in the memory 220 is stored in the auxiliary storage device 230 as needed.
- the auxiliary storage device 230 is a non-volatile storage device.
- the auxiliary storage device 230 is a read only memory (ROM), a hard disk drive (HDD), or a flash memory.
- the data stored in the auxiliary storage device 230 is loaded into the memory 220 as needed.
- the sensor 240 is a sensor that obtains information necessary to calculate the position of the mobile terminal 200.
- the sensor 240 is an inertial sensor and a barometric pressure sensor.
- An inertial sensor is a sensor for inertial navigation.
- the inertial sensor is an acceleration sensor and a gyro sensor.
- Communication device 250 is a device that communicates, ie, a receiver and a transmitter.
- the communication device 250 is a communication chip or a NIC (Network Interface Card).
- the input / output device 260 is an input device and an output device.
- the input device is an input key, a touch panel and a camera, and the output device is a display, a speaker and a vibrator.
- the processor 210 includes elements such as a work data generation unit 211, an initial position data generation unit 212, and a warning determination unit 213. These elements are realized by software.
- the auxiliary storage device 903 stores a terminal program for causing a computer to function as a work data generation unit 211, an initial position data generation unit 212, and a warning determination unit 213.
- the terminal program is loaded into memory 220 and executed by processor 210.
- the auxiliary storage device 230 stores an operating system (OS). At least a portion of the OS is loaded into memory 220 and executed by processor 210. That is, the processor 210 executes the terminal program while executing the OS.
- Data obtained by executing the terminal program is stored in a storage device such as a memory 220, an auxiliary storage device 230, a register in the processor 210 or a cache memory in the processor 210.
- the memory 220 functions as the storage unit 221. However, another storage device may function as the storage unit 221 instead of the memory 220 or together with the memory 220.
- the communication device 250 functions as the communication unit 251.
- the input / output device 260 functions as a display unit 261, a reception unit 262, and a warning unit 263.
- the mobile terminal 200 may include a plurality of processors that replace the processor 210.
- the multiple processors share the role of the processor 210.
- the terminal program can be recorded (stored) in a computer readable manner on a non-volatile recording medium such as an optical disk or a flash memory.
- the configuration of the work evaluation apparatus 300 will be described based on FIG.
- the work evaluation apparatus 300 is a computer including hardware such as a processor 310, a memory 320, an auxiliary storage device 330, and a communication device 340. These pieces of hardware are connected to each other via signal lines.
- the processor 310 is an IC that performs arithmetic processing and controls other hardware.
- processor 310 is a CPU, a DSP or a GPU.
- the memory 320 is a volatile storage device.
- the memory 320 is also referred to as main storage or main memory.
- the memory 320 is a RAM.
- the data stored in the memory 320 is stored in the auxiliary storage device 330 as needed.
- the auxiliary storage device 330 is a non-volatile storage device.
- the auxiliary storage device 330 is a ROM, an HDD or a flash memory. The data stored in the auxiliary storage device 330 is loaded into the memory 320 as needed.
- Communication device 340 is a device that communicates, ie, a receiver and a transmitter.
- the communication device 340 is a communication chip or a NIC.
- the work evaluation apparatus 300 includes elements such as a site data acquisition unit 311, a work position calculation unit 312, and a work position determination unit 313. These elements are realized by software.
- the auxiliary storage device 903 stores a work evaluation program for causing a computer to function as a site data acquisition unit 311, a work position calculation unit 312, and a work position determination unit 313.
- the work evaluation program is loaded into the memory 320 and executed by the processor 310.
- an OS is stored in the auxiliary storage device 330. At least a portion of the OS is loaded into memory 320 and executed by processor 310. That is, the processor 310 executes the work evaluation program while executing the OS.
- Data obtained by executing the work evaluation program is stored in a storage device such as a memory 320, an auxiliary storage device 330, a register in the processor 310 or a cache memory in the processor 310.
- the memory 320 functions as the storage unit 321. However, another storage device may function as the storage unit 321 instead of the memory 320 or together with the memory 320.
- the communication device 340 functions as the communication unit 341.
- the work evaluation apparatus 300 may include a plurality of processors that replace the processor 310.
- the multiple processors share the role of the processor 310.
- the work evaluation program can be recorded (stored) in a computer readable manner on a non-volatile recording medium such as an optical disk or a flash memory.
- the operation of the work evaluation system 100 corresponds to a work evaluation method.
- the procedure of the work evaluation method corresponds to the procedure of the work evaluation program.
- the work evaluation method is performed after work.
- the worker 101 holds the portable terminal 200 at the work place.
- portable terminal 200 memorizes sensor data of each time.
- the sensor 240 generates sensor data at each time.
- the storage unit 221 stores sensor data of each time.
- the sensor data indicates acceleration, angular velocity, barometric pressure, and the like.
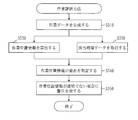
- the work data generation unit 211 generates work data.
- the work data includes a site identifier, a work identifier, and a work time.
- the site identifier identifies the work site.
- the work identifier identifies the work content.
- the work time corresponds to the time when the work was performed. Specifically, the work time corresponds to the work end time.
- step S111 the display unit 261 displays a result input screen.
- the result input screen has a result input field for each set of site identifier and operation identifier.
- the result input field is a field into which the work result is input, and is associated with a combination of a site identifier and a work identifier.
- step S112 the operator 101 operates the input device of the portable terminal 200 to select the result input field and input the work result in the result input field.
- the receiving unit 262 receives the work result input in the selected result input field.
- the operation result is the inspection result of the device, torque values of screws and bolts, sensitivity values of sensors, and the like.
- step S113 the work data generation unit 211 generates work data.
- the storage unit 221 stores work data.
- the work data includes the received work result, the work site identifier associated with the selected result input field, and the work result associated with the selected result input field.
- work data includes work time.
- the work time is the time when the work result is accepted.
- step S114 the communication unit 251 transmits work data to the work evaluation apparatus 300.
- step S115 the communication unit 341 receives work data from the portable terminal 200. Then, the storage unit 321 stores work data.
- step S120 the work position calculation unit 312 calculates work position information based on the sensor data of each time obtained by the sensor 240.
- the work position information is position information of the work position.
- the work position is the position of the mobile terminal 200 at the work time.
- Position information is information indicating a position. Specifically, the position information is a three-dimensional coordinate value.
- step S121 the communication unit 251 transmits sensor data of each time to the work evaluation device 300.
- step S122 the communication unit 341 receives sensor data of each time from the portable terminal 200. Then, the storage unit 321 stores sensor data of each time.
- step S123 the work position calculation unit 312 calculates the position information of the portable terminal 200 at each time by performing the autonomous navigation using the sensor data of each time.
- Autonomous navigation is also called inertial navigation.
- the work position calculation unit 312 further uses initial position information.
- the initial position information is information indicating an initial position.
- the initial position is a position to be a base point.
- the work position calculation unit 312 acquires initial position information by at least one of a beacon, a barcode, path matching, position input, and image analysis.
- initial position data is data including initial position information.
- the work position calculation unit 312 acquires initial position information by beacon as follows.
- a beacon device is installed at each work place.
- the beacon device transmits a beacon including initial position information.
- the communication unit 251 receives a beacon from the beacon device.
- the initial position data generation unit 212 acquires initial position information from the beacon and generates initial position data.
- the communication unit 251 transmits the initial position data to the work evaluation apparatus 300.
- the communication unit 341 receives initial position data from the portable terminal 200. Then, the work position calculation unit 312 acquires initial position information from the initial position data.
- the work position calculation unit 312 acquires initial position information by barcode as follows. A barcode is written on each work place. Initial position information is registered in the barcode. The worker 101 shoots a bar code with the camera of the mobile terminal 200. The initial position data generation unit 212 reads initial position information from the barcode and generates initial position data. The communication unit 251 transmits the initial position data to the work evaluation apparatus 300. The communication unit 341 receives initial position data from the portable terminal 200. Then, the work position calculation unit 312 acquires initial position information from the initial position data.
- the work position calculation unit 312 acquires initial position information as follows by route matching.
- the site data to be described later includes a site map.
- the site map is a map of the work site and shows the arrangement of each passage and the position information of each point.
- the work position calculation unit 312 calculates the movement route of the mobile terminal 200 by performing autonomous navigation using sensor data of each time. Next, based on the site map, the work position calculation unit 312 extracts a movement path that matches the movement path of the portable terminal 200 from the path in the work site. Then, the work position calculation unit 312 acquires position information of the start point in the moving path from the site map.
- the acquired position information is initial position information.
- the work position calculation unit 312 acquires initial position information as follows by image analysis.
- the communication unit 251 transmits the image obtained by photographing to the work evaluation apparatus 300.
- the communication unit 341 receives an image from the portable terminal 200.
- the site data to be described later includes a site map.
- the site map is a map of the work site and shows the location and position information of each point.
- the work position calculation unit 312 detects the movement start point by analyzing the image. Then, the work position calculation unit 312 acquires position information of the movement start point from the site map.
- the acquired position information is initial position information.
- step S124 the work position calculation unit 312 acquires work time from the work data acquired in step S110.
- step S125 the work position calculation unit 312 acquires the position information of the portable terminal 200 at the work time from the position information of the portable terminal 200 at each time.
- the acquired position information is work position information.
- step S130 the on-site data acquisition unit 311 acquires corresponding on-site data from the on-site database 111.
- the corresponding site data is site data corresponding to the site identifier included in the work data acquired in step S110.
- the site database 111 has site data for each pair of the site identifier and the operation identifier.
- the field data includes standard position information.
- Standard position information is position information of a standard position.
- the standard position is a position determined as a position where work is performed.
- step S131 the site data acquisition unit 311 acquires a pair of a site identifier and a task identifier from the work data acquired in step S110.
- step S 132 the site data acquisition unit 311 communicates with the data server 110 via the communication unit 341 to acquire site data corresponding to the set acquired in step S 131 from the site database 111.
- the acquired site data is the corresponding site data.
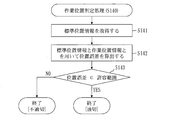
- step S140 the work position determination unit 313 determines the propriety of the work position information based on the standard position information included in the relevant site data.
- step S141 the work position determination unit 313 acquires standard position information from the relevant site data.
- step S142 the work position determination unit 313 calculates a position error using the standard position information and the work position information.
- the position error is the distance from the standard position to the work position.
- step S143 the work position determination unit 313 determines whether the position error is a value within the allowable range.
- This allowable range is a range predetermined for position error. If the position error is a value within the allowable range, the work position information is appropriate. If the position error is out of the allowable range, the work position information is not appropriate.
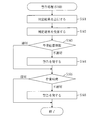
- step S150 the warning unit 263 issues a warning when the work position information is not appropriate.
- step S151 the communication unit 341 transmits the determination result to the portable terminal 200.
- the determination result indicates the propriety of the work position information.
- step S152 the communication unit 251 receives the determination result from the portable terminal 200.
- step S153 the warning determination unit 213 determines whether the work position information is appropriate by referring to the determination result. If the work position information is appropriate, the process ends. If the work position information is not appropriate, the process proceeds to step S154.
- step S154 the warning unit 263 issues a warning. Specifically, the warning unit 263 displays a warning message.
- the warning message is a message prompting to correct the work.
- Embodiment 1 *** Effect of Embodiment 1 ***
- work data is generated triggered by an input of a work result to the portable terminal 200, and work position information is calculated using the sensor 240. Therefore, the work evaluation system 100 can determine the propriety of the work position information without attaching a bar code, an IC tag or the like in which the information specifying the work target is registered to each work target.
- the work evaluation device 300 may be configured by a plurality of devices.
- Elements of the work evaluation apparatus 300 such as the site data acquisition unit 311, the work position calculation unit 312, and the work position determination unit 313 may be included in the mobile terminal 200.
- the site database 111 may be stored in the work evaluation device 300 or the mobile terminal 200.
- the work evaluation apparatus 300 and the data server 110 may be connected to each other by a network 109 other than the Internet.
- the work evaluation apparatus 300 and the data server 110 may be connected to each other by an intranet, a LAN (Local Area Network), or a cable.
- the work position calculation unit 312 calculates the position information of the portable terminal 200 at the work time using the sensor data of each time, and corrects the position information of the portable terminal 200 at the work time to position information indicating the position within the site range. May be The corrected position information is used as work position information.
- the site range is the scope of the work site. Specifically, the site range is a space in a building or a place lower than the roof. For example, site data includes site maps, and site maps indicate site coverage. Then, the work position calculation unit 312 corrects the position information of the portable terminal 200 at the work time based on the site range indicated by the site map. Furthermore, the work position calculation unit 312 may correct the initial position information and the position information of the portable terminal 200 at each time.
- the work position calculation unit 312 may calculate only work position information without calculating position information of the mobile terminal 200 at times other than the work time. For example, the work position calculation unit 312 may calculate the height information of the portable terminal 200 at the work time using the sensor data of the air pressure sensor at the work time.
- the sensor 240 may be provided outside the mobile terminal 200.
- the worker 101 holds the sensor terminal communicating with the mobile terminal 200 together with the mobile terminal 200.
- the sensor terminal includes the sensor 240.
- the position information may be one-dimensional or two-dimensional information.
- height information is important when working with elevators or transmission towers.
- distance information is important in work on the rail.
- the position information may be one-dimensional information such as height information or position information.
- the height information is calculated using sensor data of an air pressure sensor. For example, height information is not important when working on one floor. If the height information is not important, the position information may be two-dimensional information.
- the warning message may be displayed on a display device other than the mobile terminal 200.
- the communication device 250 functions as the warning unit 263, and the warning unit 263 transmits a warning message to display devices other than the portable terminal 200.
- the display devices other than the mobile terminal 200 display a warning message.
- the worker 101 wears a display device other than the portable terminal 200, and the display device displays a warning message.
- An example of a display device other than the mobile terminal 200 is a head mounted display worn by the worker 101.
- the warning unit 263 may issue a warning by a method other than display by a display.
- the warning unit 263 issues a warning by voice output by a speaker, vibration by a vibrator, or e-mail transmission by the communication device 250.
- the worker 101 may not be a human but a robot. That is, the work evaluation system 100 may include the work robot, and the work robot may include the portable terminal 200. For example, the work robot holds or incorporates the portable terminal 200.
- the data server 110 stores a time expression database 112.
- the time expression database 112 has a time expression for each set of site identifier and work identifier.
- the time equation is an equation for calculating the standard time, and has a size variable.
- the size variable is a variable to which a field size value described later is substituted.
- the other configuration is the same as the configuration in the first embodiment (see FIG. 1).
- the configuration of portable terminal 200 is the same as that of the second embodiment (see FIG. 2).
- the work evaluation apparatus 300 includes elements such as a work time calculation unit 314, a standard time calculation unit 315, and a work time determination unit 316.
- the work evaluation program causes the computer to function as a work time calculation unit 314, a standard time calculation unit 315, and a work time determination unit 316 in addition to the work position determination unit 313 from the site data acquisition unit 311.
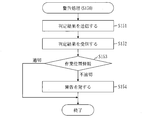
- step S110 the work data generation unit 211 generates work data.
- the procedure of step S110 is as described in the first embodiment (see FIG. 5).
- step S120 the work position calculation unit 312 calculates work position information based on the sensor data of each time obtained by the sensor 240.
- step S130 the on-site data acquisition unit 311 acquires corresponding on-site data from the on-site database 111.
- step S140 the work position determination unit 313 determines whether the work position information is correct or not based on the standard position information included in the relevant site data. The procedure of steps S120 to S140 is as described in the first embodiment (see FIGS. 6 to 8).
- step S200 the work evaluation apparatus 300 determines whether the work time is correct.
- the working time corresponds to the time when the work was performed.
- step S210 the work time calculation unit 314 calculates the work time based on the time information included in the work data.
- the working time calculation unit 314 calculates the working time as follows. Multiple tasks are performed as a series of tasks. Work data is generated for each work. Each work data includes work time. The work time calculation unit 314 acquires work time from the current work data. The acquired work time is called this work time. The work time calculation unit 314 acquires work time from the previous work data. The acquired work time is referred to as the previous work time. The work time calculation unit 314 calculates the time from the previous work time to the current work time. The time calculated is the working time.
- the working time calculation unit 314 calculates the working time as follows.
- the worker 101 operates the portable terminal 200 to confirm the work procedure when starting the work.
- the display unit 261 displays the work procedure.
- the work data includes a work start time and a work end time.
- the work start time is the time when the work procedure is displayed
- the work end time is the time when the work result is accepted.
- the work end time corresponds to the work time in the first embodiment.
- the work time calculation unit 314 acquires the work start time and the work finish time from the work data, and calculates the time from the work start time to the work finish time.
- the time calculated is the working time.
- the standard time calculation unit 315 calculates the standard time using the spot size value included in the relevant spot data (see step S130).
- Each site data includes site size values.
- the field size value indicates the size of the work site. For example, the site size value is floor area or number of floors.
- step S220 The procedure of the standard time calculation process (S220) will be described based on FIG.
- step S221 the standard time calculation unit 315 acquires a field size value from the corresponding field data.
- step S222 the standard time calculation unit 315 communicates with the data server 110 via the communication unit 341 to obtain a time expression corresponding to the set acquired in step S131 (see FIG. 7) from the time expression database 112. get.
- the acquired time expression is called the corresponding time expression.
- step S223 the standard time calculation unit 315 substitutes the field size value into the size variable in the corresponding time formula.
- step S224 the standard time calculation unit 315 calculates the corresponding time formula. Thereby, the standard time is calculated.
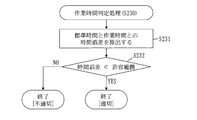
- step S230 the working time determination unit 316 determines whether the working time is appropriate based on the standard time.
- step S230 the working time determination unit 316 calculates the difference between the standard time and the working time.
- the calculated difference is called a time error.
- step S232 the working time determination unit 316 determines whether the time error is a value within the allowable range.
- This tolerance range is a range predetermined for time error. If the time error is an acceptable value, the working time is appropriate. If the time error is out of tolerance, the working time is not appropriate.
- step S160 the warning unit 263 issues a warning when at least one of the work position information and the work time is not appropriate.
- step S161 the communication unit 341 transmits the determination result to the portable terminal 200.
- the determination result indicates the propriety of the work position information and the propriety of the work time.
- step S162 the communication unit 251 receives the determination result from the portable terminal 200.
- step S163 the warning determination unit 213 determines the suitability of the work position information by referring to the determination result. If the work position information is appropriate, the process proceeds to step S165. If the work position information is not appropriate, the process proceeds to step S164.
- step S164 the warning unit 263 issues a warning. Specifically, the warning unit 263 displays a warning message for work position information.
- step S165 the warning determination unit 213 determines whether the working time is appropriate by referring to the determination result. If the working time is appropriate, the process ends. If the working time is not appropriate, the process proceeds to step S166.
- step S166 the warning unit 263 issues a warning. Specifically, the warning unit 263 displays a warning message for working time.
- the warning message for the work position information and the warning message for the working time may be the same warning message or different warning messages.
- the warning unit 263 may issue a warning when both work position information and work time are not appropriate.
- the work evaluation apparatus 300 may not determine whether the work position information is appropriate. That is, the work evaluation apparatus 300 may not include the work position calculation unit 312 and the work position determination unit 313.
- the work evaluation device 300 may be configured by a plurality of devices.
- Elements of the work evaluation apparatus 300 such as the site data acquisition unit 311, the work position calculation unit 312, and the work position determination unit 313 may be included in the mobile terminal 200.
- Elements of the work evaluation device 300 such as the work time calculation unit 314, the standard time calculation unit 315, and the work time determination unit 316 may be included in the mobile terminal 200.
- the site database 111 may be stored in the work evaluation device 300 or the mobile terminal 200.
- the work evaluation apparatus 300 and the data server 110 may be connected to each other by a network 109 other than the Internet.
- the work evaluation apparatus 300 and the data server 110 may be connected to each other by an intranet, a LAN or a cable.
- the work position calculation unit 312 calculates the position information of the portable terminal 200 at the work time using the sensor data of each time, and corrects the position information of the portable terminal 200 at the work time to position information indicating the position within the site range. May be The corrected position information is used as work position information.
- the site range is the scope of the work site. Specifically, the site range is a space in a building or a place lower than the roof. For example, site data includes site maps, and site maps indicate site coverage. Then, the work position calculation unit 312 corrects the position information of the portable terminal 200 at the work time based on the site range indicated by the site map. Furthermore, the work position calculation unit 312 may correct the initial position information and the position information of the portable terminal 200 at each time.
- the work position calculation unit 312 may calculate only work position information without calculating position information of the mobile terminal 200 at times other than the work time. For example, the work position calculation unit 312 may calculate the height information of the portable terminal 200 at the work time using the sensor data of the air pressure sensor at the work time.
- the sensor 240 may be provided outside the mobile terminal 200.
- the worker 101 holds the sensor terminal communicating with the mobile terminal 200 together with the mobile terminal 200.
- the sensor terminal includes the sensor 240.
- the position information may be one-dimensional or two-dimensional information.
- height information is important when working with elevators or transmission towers.
- distance information is important in work on the rail.
- the position information may be one-dimensional information such as height information or position information.
- the height information is calculated using sensor data of an air pressure sensor. For example, height information is not important when working on one floor. If the height information is not important, the position information may be two-dimensional information.
- the warning message may be displayed on a display device other than the mobile terminal 200.
- the communication device 250 functions as the warning unit 263, and the warning unit 263 transmits a warning message to display devices other than the portable terminal 200.
- the display devices other than the mobile terminal 200 display a warning message.
- the worker 101 wears a display device other than the portable terminal 200, and the display device displays a warning message.
- An example of a display device other than the mobile terminal 200 is a head mounted display worn by the worker 101.
- the warning unit 263 may issue a warning by a method other than display by a display.
- the warning unit 263 issues a warning by voice output by a speaker, vibration by a vibrator, or e-mail transmission by the communication device 250.
- the worker 101 may not be a human but a robot. That is, the work evaluation system 100 may include the work robot, and the work robot may include the portable terminal 200. For example, the work robot holds or incorporates the portable terminal 200.
- the configuration of the task evaluation system 100 is the same as the configuration in the first embodiment (see FIGS. 1 to 3).
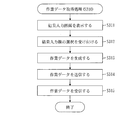
- step S310 the work data generation unit 211 generates work data.
- step S311 the display unit 261 displays a result input screen.
- step S312 the operator 101 operates the input device of the portable terminal 200 to select the result input field and input the work result in the result input field.
- the receiving unit 262 receives the selection of the result input field.
- the accepting unit 262 does not accept the work result at this time.
- step S313 the work data generation unit 211 generates work data.
- the storage unit 221 stores work data.
- the work data includes the work site identifier associated with the selected result input field and the work result associated with the selected result input field.
- work data includes work time.
- the work time is the time when the result input field is selected.
- step S314 the communication unit 251 transmits work data to the work evaluation apparatus 300.
- step S315 the communication unit 341 receives work data from the portable terminal 200. Then, the storage unit 321 stores work data.
- step S320 the work position calculation unit 312 calculates work position information based on the sensor data of each time obtained by the sensor 240.
- the process in step S320 is the same as the process in step S120 of the first embodiment.
- step S330 the on-site data acquisition unit 311 acquires corresponding on-site data from the on-site database 111.
- the process in step S330 is the same as the process in step S130 of the first embodiment.
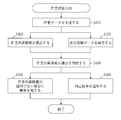
- step S350 the warning unit 263 issues a warning when the work position information is not appropriate.
- step S 351 the communication unit 341 transmits the determination result to the portable terminal 200.
- step S352 the communication unit 251 receives the determination result from the portable terminal 200.
- step S353 the warning determination unit 213 determines the suitability of the work position information by referring to the determination result. If the work position information is appropriate, the process proceeds to step S354. If the work position information is not appropriate, the process proceeds to step S355.
- step S354 the receiving unit 262 receives the work result input in step S312. Then, the warning determination unit 213 adds the work result to the work data stored in step S113.
- step S355 the warning unit 263 issues a warning.
- the receiving unit 262 does not receive the work result input in step S312. Therefore, the warning determination unit 213 does not add the work result to the work data stored in step S113.
- Embodiment 3 *** Effect of Embodiment 3 ***
- work data is generated triggered by an input of a work result to the portable terminal 200, and work position information is calculated using the sensor 240. Therefore, the work evaluation system 100 can determine the propriety of the work position information without attaching a bar code, an IC tag or the like in which the information specifying the work target is registered to each work target. Furthermore, when the work position information is not appropriate, it is possible not to accept the work result.
- the work evaluation apparatus 300 may determine whether the work time is appropriate. That is, the work evaluation apparatus 300 may include the work time calculation unit 314, the standard time calculation unit 315, and the work time determination unit 316.
- the receiving unit 262 receives the work result when the warning unit 263 does not issue a warning, and does not receive the work result when the warning unit 263 issues a warning. That is, the reception unit 262 receives the work result when both the work position information and the work time are appropriate, and does not receive the work result when at least one of the work position information and the work time is not appropriate. . Alternatively, the receiving unit 262 receives the work result when at least one of the work position information and the work time is appropriate, and does not receive the work result when both the work position information and the work time are not appropriate. .
- the work evaluation device 300 may be configured by a plurality of devices.
- Elements of the work evaluation apparatus 300 such as the site data acquisition unit 311, the work position calculation unit 312, and the work position determination unit 313 may be included in the mobile terminal 200.
- Elements of the work evaluation device 300 such as the work time calculation unit 314, the standard time calculation unit 315, and the work time determination unit 316 may be included in the mobile terminal 200.
- the site database 111 may be stored in the work evaluation device 300 or the mobile terminal 200.
- the work evaluation apparatus 300 and the data server 110 may be connected to each other by a network 109 other than the Internet.
- the work evaluation apparatus 300 and the data server 110 may be connected to each other by an intranet, a LAN or a cable.
- the work position calculation unit 312 calculates the position information of the portable terminal 200 at the work time using the sensor data of each time, and corrects the position information of the portable terminal 200 at the work time to position information indicating the position within the site range. May be The corrected position information is used as work position information.
- the site range is the scope of the work site. Specifically, the site range is a space in a building or a place lower than the roof. For example, site data includes site maps, and site maps indicate site coverage. Then, the work position calculation unit 312 corrects the position information of the portable terminal 200 at the work time based on the site range indicated by the site map. Furthermore, the work position calculation unit 312 may correct the initial position information and the position information of the portable terminal 200 at each time.
- the work position calculation unit 312 may calculate only work position information without calculating position information of the mobile terminal 200 at times other than the work time. For example, the work position calculation unit 312 may calculate the height information of the portable terminal 200 at the work time using the sensor data of the air pressure sensor at the work time.
- the sensor 240 may be provided outside the mobile terminal 200.
- the worker 101 holds the sensor terminal communicating with the mobile terminal 200 together with the mobile terminal 200.
- the sensor terminal includes the sensor 240.
- the position information may be one-dimensional or two-dimensional information.
- height information is important when working with elevators or transmission towers.
- distance information is important in work on the rail.
- the position information may be one-dimensional information such as height information or position information.
- the height information is calculated using sensor data of an air pressure sensor. For example, height information is not important when working on one floor. If the height information is not important, the position information may be two-dimensional information.
- the warning message may be displayed on a display device other than the mobile terminal 200.
- the communication device 250 functions as the warning unit 263, and the warning unit 263 transmits a warning message to display devices other than the portable terminal 200.
- the display devices other than the mobile terminal 200 display a warning message.
- the worker 101 wears a display device other than the portable terminal 200, and the display device displays a warning message.
- An example of a display device other than the mobile terminal 200 is a head mounted display worn by the worker 101.
- the warning unit 263 may issue a warning by a method other than display by a display.
- the warning unit 263 issues a warning by voice output by a speaker, vibration by a vibrator, or e-mail transmission by the communication device 250.
- the worker 101 may not be a human but a robot. That is, the work evaluation system 100 may include the work robot, and the work robot may include the portable terminal 200. For example, the work robot holds or incorporates the portable terminal 200.
- the work evaluation system 100 includes a management device 400.
- the management device 400 is a device other than the mobile terminal 200, the work evaluation device 300, and the data server 110.
- the management device 400 is a manager terminal, a worker organization device, or a work history management device.
- the administrator terminal is a terminal used by the administrator.
- the worker organization device is a device used in a worker organization system.
- the worker scheduling system is a system for assigning workers to each work.
- the work history management device is a device used in a work history management system.
- the work history management system is a system for managing the work history of each work site.
- the configuration of the management device 400 will be described based on FIG.
- the management device 400 is a computer including hardware such as a processor 410, a memory 420, an auxiliary storage device 430, a communication device 440, and an input / output device 450. These pieces of hardware are connected to each other via signal lines.
- the processor 410 is an IC that performs arithmetic processing and controls other hardware.
- processor 410 is a CPU, a DSP, or a GPU.
- the memory 420 is a volatile storage device.
- Memory 420 is also referred to as main storage or main memory.
- the memory 420 is a RAM.
- the data stored in the memory 420 is stored in the auxiliary storage device 430 as needed.
- the auxiliary storage device 430 is a non-volatile storage device.
- the auxiliary storage device 430 is a ROM, an HDD, or a flash memory. The data stored in the auxiliary storage device 430 is loaded into the memory 420 as needed.
- Communication device 440 is a device that communicates, ie, a receiver and a transmitter.
- the communication device 440 is a communication chip or a NIC.
- the input / output device 450 is an input device and an output device.
- the input device is an input key, a touch panel and a camera, and the output device is a display, a speaker and a vibrator.
- the processor 410 includes a management unit 411.
- the management unit 411 is realized by software.
- the auxiliary storage device 903 stores a management program for causing a computer to function as the management unit 411.
- the management program is loaded into the memory 420 and executed by the processor 410.
- the auxiliary storage device 430 stores an OS. At least a portion of the OS is loaded into memory 420 and executed by processor 410. That is, the processor 410 executes the terminal program while executing the OS. Data obtained by executing the terminal program is stored in a storage device such as a memory 420, an auxiliary storage device 430, a register in the processor 410 or a cache memory in the processor 410.
- the memory 420 functions as the storage unit 421. However, another storage device may function as the storage unit 421 instead of the memory 420 or together with the memory 420.
- the communication device 440 functions as the communication unit 441.
- the input / output device 450 functions as the display unit 451.
- the management device 400 may include a plurality of processors that replace the processor 410.
- the multiple processors share the role of the processor 410.
- the management program can be recorded (stored) in a computer readable manner on a non-volatile recording medium such as an optical disk or flash memory.
- the configuration of the work evaluation apparatus 300 will be described based on FIG.
- the work evaluation apparatus 300 further includes a determination result notification unit 317.
- the work evaluation program further causes the computer to function as the determination result notification unit 317.
- the configuration of portable terminal 200 is the same as that of the first embodiment (see FIG. 2).
- Steps S410 to S450 are the same as steps S110 to S150 in the first embodiment.
- step S460 the determination result notification unit 317 notifies the management device 400 of the determination result.
- step S461 the determination result notification unit 317 adds the determination result to the work data.
- step S 462 the determination result notification unit 317 transmits work data to the management apparatus 400 via the communication unit 341.
- the determination result notification unit 317 transmits an e-mail including work data.
- step S463 the communication unit 441 receives work data from the work evaluation apparatus 300. Then, the storage unit 421 stores work data. Further, the display unit 451 displays work data. The management unit 411 also manages work data.
- the work evaluation apparatus 300 may determine whether the work time is appropriate. That is, the work evaluation apparatus 300 may include the work time calculation unit 314, the standard time calculation unit 315, and the work time determination unit 316.
- the receiving unit 262 receives the work result when the warning unit 263 does not issue a warning, and does not receive the work result when the warning unit 263 issues a warning. That is, the reception unit 262 receives the work result when both the work position information and the work time are appropriate, and does not receive the work result when at least one of the work position information and the work time is not appropriate. . Alternatively, the receiving unit 262 receives the work result when at least one of the work position information and the work time is appropriate, and does not receive the work result when both the work position information and the work time are not appropriate. .
- the portable terminal 200 may not receive the work result when the work position information (and the work time) is not appropriate.
- the work evaluation device 300 may be configured by a plurality of devices.
- Elements of the work evaluation apparatus 300 such as the site data acquisition unit 311, the work position calculation unit 312, and the work position determination unit 313 may be included in the mobile terminal 200.
- Elements of the work evaluation device 300 such as the work time calculation unit 314, the standard time calculation unit 315, and the work time determination unit 316 may be included in the mobile terminal 200.
- the determination result notification unit 317 may be included in the mobile terminal 200.
- the site database 111 may be stored in the work evaluation device 300 or the mobile terminal 200.
- the work evaluation apparatus 300 and the data server 110 may be connected to each other by a network 109 other than the Internet.
- the work evaluation apparatus 300 and the data server 110 may be connected to each other by an intranet, a LAN or a cable.
- the work position calculation unit 312 calculates the position information of the portable terminal 200 at the work time using the sensor data of each time, and corrects the position information of the portable terminal 200 at the work time to position information indicating the position within the site range. May be The corrected position information is used as work position information.
- the site range is the scope of the work site. Specifically, the site range is a space in a building or a place lower than the roof. For example, site data includes site maps, and site maps indicate site coverage. Then, the work position calculation unit 312 corrects the position information of the portable terminal 200 at the work time based on the site range indicated by the site map. Furthermore, the work position calculation unit 312 may correct the initial position information and the position information of the portable terminal 200 at each time.
- the work position calculation unit 312 may calculate only work position information without calculating position information of the mobile terminal 200 at times other than the work time. For example, the work position calculation unit 312 may calculate the height information of the portable terminal 200 at the work time using the sensor data of the air pressure sensor at the work time.
- the sensor 240 may be provided outside the mobile terminal 200.
- the worker 101 holds the sensor terminal communicating with the mobile terminal 200 together with the mobile terminal 200.
- the sensor terminal includes the sensor 240.
- the position information may be one-dimensional or two-dimensional information.
- height information is important when working with elevators or transmission towers.
- distance information is important in work on the rail.
- the position information may be one-dimensional information such as height information or position information.
- the height information is calculated using sensor data of an air pressure sensor. For example, height information is not important when working on one floor. If the height information is not important, the position information may be two-dimensional information.
- the warning message may be displayed on a display device other than the mobile terminal 200.
- the communication device 250 functions as the warning unit 263, and the warning unit 263 transmits a warning message to display devices other than the portable terminal 200.
- the display devices other than the mobile terminal 200 display a warning message.
- the worker 101 wears a display device other than the portable terminal 200, and the display device displays a warning message.
- An example of a display device other than the mobile terminal 200 is a head mounted display worn by the worker 101.
- the warning unit 263 may issue a warning by a method other than display by a display.
- the warning unit 263 issues a warning by voice output by a speaker, vibration by a vibrator, or e-mail transmission by the communication device 250.
- the worker 101 may not be a human but a robot. That is, the work evaluation system 100 may include the work robot, and the work robot may include the portable terminal 200. For example, the work robot holds or incorporates the portable terminal 200.
- the mobile terminal 200 includes a processing circuit 290.
- the processing circuit 290 is hardware that implements the work data generation unit 211, the initial position data generation unit 212, the warning determination unit 213, and the storage unit 221.
- the processing circuit 290 may be dedicated hardware or may be a processor 210 that executes a program stored in the memory 220.
- processing circuit 290 may be, for example, a single circuit, a complex circuit, a programmed processor, a parallel programmed processor, an ASIC, an FPGA, or a combination thereof.
- ASIC is an abbreviation for Application Specific Integrated Circuit
- FPGA is an abbreviation for Field Programmable Gate Array.
- the mobile terminal 200 may include a plurality of processing circuits that replace the processing circuit 290. The plurality of processing circuits share the role of the processing circuit 290.
- some functions may be realized by dedicated hardware, and the remaining functions may be realized by software or firmware.
- processing circuitry 290 may be implemented in hardware, software, firmware, or a combination thereof.
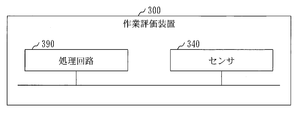
- the work evaluation apparatus 300 includes a processing circuit 390.
- the processing circuit 390 includes a site data acquisition unit 311, a work position calculation unit 312, a work position determination unit 313, a work time calculation unit 314, a standard time calculation unit 315, a work time determination unit 316, a judgment result notification unit 317, and a storage unit 321.
- Hardware that realizes The processing circuit 390 may be dedicated hardware or may be a processor 310 that executes a program stored in the memory 320.
- processing circuit 390 may be, for example, a single circuit, a complex circuit, a programmed processor, a parallel programmed processor, an ASIC, an FPGA, or a combination thereof.
- the work evaluation apparatus 300 may include a plurality of processing circuits that replace the processing circuit 390. The plurality of processing circuits share the role of the processing circuit 390.
- processing circuitry 390 can be implemented in hardware, software, firmware, or a combination thereof.
- the hardware configuration of the management device 400 will be described based on FIG.
- the management device 400 comprises a processing circuit 490.
- the processing circuit 490 is hardware that implements the management unit 411 and the storage unit 421.
- the processing circuit 490 may be dedicated hardware or may be a processor 410 that executes a program stored in the memory 420.
- the processing circuit 490 is dedicated hardware, then the processing circuit 490 is, for example, a single circuit, a complex circuit, a programmed processor, a parallel programmed processor, an ASIC, an FPGA, or a combination thereof.
- the management device 400 may include multiple processing circuits that replace the processing circuit 490. The plurality of processing circuits share the role of the processing circuit 490.
- management apparatus 400 some functions may be realized by dedicated hardware, and the remaining functions may be realized by software or firmware.
- processing circuitry 490 can be implemented in hardware, software, firmware, or a combination thereof.
- the embodiments are exemplifications of preferred embodiments, and are not intended to limit the technical scope of the present invention.
- the embodiment may be partially implemented or may be implemented in combination with other embodiments.
- the procedure described using the flowchart and the like may be changed as appropriate.
- DESCRIPTION OF SYMBOLS 100 work evaluation system, 101 worker, 109 network, 110 data server, 111 field database, 112 time type database, 200 portable terminal, 210 processor, 211 work data generation part, 212 initial position data generation part, 213 warning judgment part, 220 memory, 221 storage unit, 230 auxiliary storage device, 240 sensor, 250 communication device, 251 communication unit, 260 input / output device, 261 display unit, 262 reception unit, 263 warning unit, 290 processing circuit, 300 work evaluation device, 310 Processor, 311 site data acquisition unit, 312 work position calculation unit, 313 work position determination unit, 314 work time calculation unit, 315 standard time calculation unit, 316 work time determination unit, 317 determination result notification unit, 320 Memory, 321 storage unit, 330 auxiliary storage unit, 340 communication unit, 341 communication unit, 390 processing circuit, 400 management unit, 410 processor, 411 management unit, 420 memory, 421 storage unit, 430 auxiliary storage unit, 440 communication unit, 441 communication unit, 450
Abstract
A mobile terminal (200) displays a result input field associated with a site identifier, and generates work data including the site identifier upon selection of the result input field. A work evaluation device (300) acquires, from a site database (111), site data associated with the site identifier included in the work data. The work evaluation device calculates work location information indicating the location of the mobile terminal at a work time. The work evaluation device then determines whether or not the work location information is valid on the basis of reference location information included in the acquired site data.
Description
本発明は、作業を評価するための技術に関するものである。
The present invention relates to techniques for evaluating work.
特許文献1には、以下のような作業管理システムが開示されている。
作業対象に対する作業で使用された工具から作業情報(締め付け工具のトルク値等)が取得される。GPS受信機から測位データが取得される。GPSはGlobal Positioning Systemの略称である。作業対象から作業対象情報が読み取られる。作業対象情報は作業対象を特定する情報である。作業対象情報がデータベースと照合され、データベースから作業対象の作業内容情報および位置情報が取得される。工具から取得された作業情報がデータベースから取得された作業内容情報と比較され、GPS受信機から取得された測位データがデータベースから取得された位置情報と比較される。そして、比較結果に基づいて作業の良否が判定される。 Patent Document 1 discloses the following work management system.
Work information (a torque value of a tightening tool, etc.) is acquired from a tool used in work on a work object. Positioning data is acquired from a GPS receiver. GPS is an abbreviation of Global Positioning System. Work target information is read from the work target. The work target information is information for specifying a work target. The work target information is collated with the database, and the work content information and position information of the work target are acquired from the database. The work information obtained from the tool is compared with the work content information obtained from the database, and the positioning data obtained from the GPS receiver is compared with the position information obtained from the database. Then, the quality of the work is determined based on the comparison result.
作業対象に対する作業で使用された工具から作業情報(締め付け工具のトルク値等)が取得される。GPS受信機から測位データが取得される。GPSはGlobal Positioning Systemの略称である。作業対象から作業対象情報が読み取られる。作業対象情報は作業対象を特定する情報である。作業対象情報がデータベースと照合され、データベースから作業対象の作業内容情報および位置情報が取得される。工具から取得された作業情報がデータベースから取得された作業内容情報と比較され、GPS受信機から取得された測位データがデータベースから取得された位置情報と比較される。そして、比較結果に基づいて作業の良否が判定される。 Patent Document 1 discloses the following work management system.
Work information (a torque value of a tightening tool, etc.) is acquired from a tool used in work on a work object. Positioning data is acquired from a GPS receiver. GPS is an abbreviation of Global Positioning System. Work target information is read from the work target. The work target information is information for specifying a work target. The work target information is collated with the database, and the work content information and position information of the work target are acquired from the database. The work information obtained from the tool is compared with the work content information obtained from the database, and the positioning data obtained from the GPS receiver is compared with the position information obtained from the database. Then, the quality of the work is determined based on the comparison result.
この作業管理システムでは、上記の通り、作業対象から作業対象情報を読み取る必要がある。そのため、作業対象情報が登録されたバーコードまたはICタグ等を作業対象に取り付ける必要がある。ICはIntegrated Circuitの略称である。
In this work management system, as described above, it is necessary to read work target information from the work target. Therefore, it is necessary to attach a bar code or an IC tag or the like in which work target information is registered to the work target. IC is an abbreviation for Integrated Circuit.
特許文献1に開示された作業管理システムを従来の作業管理システムという。
作業対象が多岐に渡る現場または既に施工された現場に従来の作業管理システムが導入される場合、各作業対象にバーコードまたはICタグ等を新たに取り付けるための手間がかかる。そのため、従来の作業管理システムには、導入が容易でないという課題がある。 The work management system disclosed in Patent Document 1 is referred to as a conventional work management system.
When a conventional work management system is introduced to a site where work objects are diverse or a site that has already been constructed, it takes time and effort to newly attach a bar code or an IC tag to each work object. Therefore, there is a problem that the conventional work management system is not easy to introduce.
作業対象が多岐に渡る現場または既に施工された現場に従来の作業管理システムが導入される場合、各作業対象にバーコードまたはICタグ等を新たに取り付けるための手間がかかる。そのため、従来の作業管理システムには、導入が容易でないという課題がある。 The work management system disclosed in Patent Document 1 is referred to as a conventional work management system.
When a conventional work management system is introduced to a site where work objects are diverse or a site that has already been constructed, it takes time and effort to newly attach a bar code or an IC tag to each work object. Therefore, there is a problem that the conventional work management system is not easy to introduce.
本発明は、各作業対象にバーコードまたはICタグ等を取り付けることなく、作業を評価できるようにすることを目的とする。
An object of the present invention is to enable evaluation of work without attaching a bar code or an IC tag to each work target.
本発明の作業評価システムは、携帯端末と作業評価装置とを備える。
前記携帯端末は、
現場識別子に対応付けられ作業結果が入力される結果入力欄を表示する表示部と、
前記結果入力欄が選択された場合に前記現場識別子を含んだ作業データを生成する作業データ生成部とを備える。
前記作業評価装置は、
標準位置情報を含んだ現場データを現場識別子毎に有する現場データベースから、前記作業データに含まれる現場識別子に対応する現場データを取得する現場データ取得部と、
作業時刻における前記携帯端末の位置を示す作業位置情報を算出する作業位置算出部と、
取得された現場データに含まれる標準位置情報に基づいて前記作業位置情報の適否を判定する作業位置判定部とを備える。 The work evaluation system of the present invention comprises a portable terminal and a work evaluation device.
The portable terminal is
A display unit that displays a result input field associated with a site identifier and in which a work result is input;
And a work data generation unit for generating work data including the site identifier when the result input field is selected.
The work evaluation device is
A site data acquisition unit that acquires site data corresponding to a site identifier included in the operation data from a site database having site data including standard position information for each site identifier;
A work position calculation unit that calculates work position information indicating a position of the mobile terminal at a work time;
And a work position determination unit that determines the suitability of the work position information based on standard position information included in the acquired site data.
前記携帯端末は、
現場識別子に対応付けられ作業結果が入力される結果入力欄を表示する表示部と、
前記結果入力欄が選択された場合に前記現場識別子を含んだ作業データを生成する作業データ生成部とを備える。
前記作業評価装置は、
標準位置情報を含んだ現場データを現場識別子毎に有する現場データベースから、前記作業データに含まれる現場識別子に対応する現場データを取得する現場データ取得部と、
作業時刻における前記携帯端末の位置を示す作業位置情報を算出する作業位置算出部と、
取得された現場データに含まれる標準位置情報に基づいて前記作業位置情報の適否を判定する作業位置判定部とを備える。 The work evaluation system of the present invention comprises a portable terminal and a work evaluation device.
The portable terminal is
A display unit that displays a result input field associated with a site identifier and in which a work result is input;
And a work data generation unit for generating work data including the site identifier when the result input field is selected.
The work evaluation device is
A site data acquisition unit that acquires site data corresponding to a site identifier included in the operation data from a site database having site data including standard position information for each site identifier;
A work position calculation unit that calculates work position information indicating a position of the mobile terminal at a work time;
And a work position determination unit that determines the suitability of the work position information based on standard position information included in the acquired site data.
本発明によれば、結果入力欄に対応付けられた現場識別子に基づいて作業位置情報の適否が判定される。そのため、各作業対象にバーコードまたはICタグ等を取り付けることなく、作業を評価すること可能となる。
According to the present invention, the propriety of the work position information is determined based on the site identifier associated with the result input field. Therefore, work can be evaluated without attaching a bar code or an IC tag to each work target.
実施の形態および図面において、同じ要素および対応する要素には同じ符号を付している。同じ符号が付された要素の説明は適宜に省略または簡略化する。図中の矢印はデータの流れ又は処理の流れを主に示している。
In the embodiments and the drawings, the same elements and corresponding elements are denoted by the same reference numerals. Descriptions of elements with the same reference numerals will be omitted or simplified as appropriate. Arrows in the figure mainly indicate the flow of data or the flow of processing.
実施の形態1.
作業位置の適否を判定する形態について、図1から図9に基づいて説明する。 Embodiment 1
An embodiment for determining the suitability of the work position will be described based on FIGS. 1 to 9.
作業位置の適否を判定する形態について、図1から図9に基づいて説明する。 Embodiment 1
An embodiment for determining the suitability of the work position will be described based on FIGS. 1 to 9.
***構成の説明***
図1に基づいて、作業評価システム100の構成を説明する。
作業評価システム100は、作業者101が行った作業を評価するためのシステムである。
作業評価システム100は、携帯端末200と作業評価装置300とデータサーバ110とを備える。
携帯端末200と作業評価装置300とデータサーバ110とは、ネットワーク109を介して互いに通信を行う。例えば、ネットワーク109はインターネット回線である。 *** Description of the configuration ***
The configuration of the work evaluation system 100 will be described based on FIG.
The work evaluation system 100 is a system for evaluating the work performed by the worker 101.
The work evaluation system 100 includes aportable terminal 200, a work evaluation apparatus 300, and a data server 110.
Theportable terminal 200, the work evaluation apparatus 300 and the data server 110 communicate with each other via the network 109. For example, the network 109 is an internet connection.
図1に基づいて、作業評価システム100の構成を説明する。
作業評価システム100は、作業者101が行った作業を評価するためのシステムである。
作業評価システム100は、携帯端末200と作業評価装置300とデータサーバ110とを備える。
携帯端末200と作業評価装置300とデータサーバ110とは、ネットワーク109を介して互いに通信を行う。例えば、ネットワーク109はインターネット回線である。 *** Description of the configuration ***
The configuration of the work evaluation system 100 will be described based on FIG.
The work evaluation system 100 is a system for evaluating the work performed by the worker 101.
The work evaluation system 100 includes a
The
作業現場において、作業者101は作業を行う。
例えば、作業者101は、機器の点検、ネジ及びボルトの締め具合の調整、センサの感度調整などの作業を行う。 At the work site, the worker 101 performs work.
For example, the worker 101 performs operations such as inspection of equipment, adjustment of tightening of screws and bolts, adjustment of sensitivity of sensor, and the like.
例えば、作業者101は、機器の点検、ネジ及びボルトの締め具合の調整、センサの感度調整などの作業を行う。 At the work site, the worker 101 performs work.
For example, the worker 101 performs operations such as inspection of equipment, adjustment of tightening of screws and bolts, adjustment of sensitivity of sensor, and the like.
携帯端末200は、作業現場で作業者101に所持される。具体的には、携帯端末200は、スマートフォン、タブレット型コンピュータまたは専用端末である。
作業評価装置300は、作業者101が行った作業を評価する。
データサーバ110は、後述する現場データベース111を記憶している。 Theportable terminal 200 is possessed by the worker 101 at the work site. Specifically, the mobile terminal 200 is a smartphone, a tablet computer, or a dedicated terminal.
Thework evaluation apparatus 300 evaluates the work performed by the worker 101.
Thedata server 110 stores a site database 111 described later.
作業評価装置300は、作業者101が行った作業を評価する。
データサーバ110は、後述する現場データベース111を記憶している。 The
The
The
図2に基づいて、携帯端末200の構成を説明する。
携帯端末200は、プロセッサ210とメモリ220と補助記憶装置230とセンサ240と通信装置250と入出力装置260といったハードウェアを備えるコンピュータである。これらのハードウェアは、信号線を介して互いに接続されている。 The configuration of themobile terminal 200 will be described based on FIG.
Theportable terminal 200 is a computer including hardware such as a processor 210, a memory 220, an auxiliary storage device 230, a sensor 240, a communication device 250, and an input / output device 260. These pieces of hardware are connected to each other via signal lines.
携帯端末200は、プロセッサ210とメモリ220と補助記憶装置230とセンサ240と通信装置250と入出力装置260といったハードウェアを備えるコンピュータである。これらのハードウェアは、信号線を介して互いに接続されている。 The configuration of the
The
プロセッサ210は、演算処理を行うIC(Integrated Circuit)であり、他のハードウェアを制御する。例えば、プロセッサ210は、CPU(Central Processing Unit)、DSP(Digital Signal Processor)、またはGPU(Graphics Processing Unit)である。
メモリ220は揮発性の記憶装置である。メモリ220は、主記憶装置またはメインメモリとも呼ばれる。例えば、メモリ220はRAM(Random Access Memory)である。メモリ220に記憶されたデータは必要に応じて補助記憶装置230に保存される。
補助記憶装置230は不揮発性の記憶装置である。例えば、補助記憶装置230は、ROM(Read Only Memory)、HDD(Hard Disk Drive)、またはフラッシュメモリである。補助記憶装置230に記憶されたデータは必要に応じてメモリ220にロードされる。 Theprocessor 210 is an IC (Integrated Circuit) that performs arithmetic processing, and controls other hardware. For example, the processor 210 is a central processing unit (CPU), a digital signal processor (DSP), or a graphics processing unit (GPU).
Thememory 220 is a volatile storage device. The memory 220 is also referred to as a main storage device or a main memory. For example, the memory 220 is a random access memory (RAM). The data stored in the memory 220 is stored in the auxiliary storage device 230 as needed.
Theauxiliary storage device 230 is a non-volatile storage device. For example, the auxiliary storage device 230 is a read only memory (ROM), a hard disk drive (HDD), or a flash memory. The data stored in the auxiliary storage device 230 is loaded into the memory 220 as needed.
メモリ220は揮発性の記憶装置である。メモリ220は、主記憶装置またはメインメモリとも呼ばれる。例えば、メモリ220はRAM(Random Access Memory)である。メモリ220に記憶されたデータは必要に応じて補助記憶装置230に保存される。
補助記憶装置230は不揮発性の記憶装置である。例えば、補助記憶装置230は、ROM(Read Only Memory)、HDD(Hard Disk Drive)、またはフラッシュメモリである。補助記憶装置230に記憶されたデータは必要に応じてメモリ220にロードされる。 The
The
The
センサ240は、携帯端末200の位置を算出するために必要な情報を得るセンサである。具体的には、センサ240は慣性センサおよび気圧センサである。慣性センサは、慣性航法のためのセンサである。具体的には、慣性センサは加速度センサおよびジャイロセンサである。
通信装置250は通信を行う装置、すなわち、レシーバ及びトランスミッタである。例えば、通信装置250は通信チップまたはNIC(Network Interface Card)である。
入出力装置260は入力装置および出力装置である。例えば、入力装置は入力キー、タッチパネルおよびカメラであり、出力装置はディスプレイ、スピーカーおよびバイブレーターである。 Thesensor 240 is a sensor that obtains information necessary to calculate the position of the mobile terminal 200. Specifically, the sensor 240 is an inertial sensor and a barometric pressure sensor. An inertial sensor is a sensor for inertial navigation. Specifically, the inertial sensor is an acceleration sensor and a gyro sensor.
Communication device 250 is a device that communicates, ie, a receiver and a transmitter. For example, the communication device 250 is a communication chip or a NIC (Network Interface Card).
The input /output device 260 is an input device and an output device. For example, the input device is an input key, a touch panel and a camera, and the output device is a display, a speaker and a vibrator.
通信装置250は通信を行う装置、すなわち、レシーバ及びトランスミッタである。例えば、通信装置250は通信チップまたはNIC(Network Interface Card)である。
入出力装置260は入力装置および出力装置である。例えば、入力装置は入力キー、タッチパネルおよびカメラであり、出力装置はディスプレイ、スピーカーおよびバイブレーターである。 The
The input /
プロセッサ210は、作業データ生成部211と初期位置データ生成部212と警告判定部213といった要素を備える。これらの要素はソフトウェアで実現される。
The processor 210 includes elements such as a work data generation unit 211, an initial position data generation unit 212, and a warning determination unit 213. These elements are realized by software.
補助記憶装置903には、作業データ生成部211と初期位置データ生成部212と警告判定部213としてコンピュータを機能させるための端末プログラムが記憶されている。端末プログラムは、メモリ220にロードされて、プロセッサ210によって実行される。
さらに、補助記憶装置230にはOS(Operating System)が記憶されている。OSの少なくとも一部は、メモリ220にロードされて、プロセッサ210によって実行される。
つまり、プロセッサ210は、OSを実行しながら、端末プログラムを実行する。
端末プログラムを実行して得られるデータは、メモリ220、補助記憶装置230、プロセッサ210内のレジスタまたはプロセッサ210内のキャッシュメモリといった記憶装置に記憶される。 The auxiliary storage device 903 stores a terminal program for causing a computer to function as a workdata generation unit 211, an initial position data generation unit 212, and a warning determination unit 213. The terminal program is loaded into memory 220 and executed by processor 210.
Further, theauxiliary storage device 230 stores an operating system (OS). At least a portion of the OS is loaded into memory 220 and executed by processor 210.
That is, theprocessor 210 executes the terminal program while executing the OS.
Data obtained by executing the terminal program is stored in a storage device such as amemory 220, an auxiliary storage device 230, a register in the processor 210 or a cache memory in the processor 210.
さらに、補助記憶装置230にはOS(Operating System)が記憶されている。OSの少なくとも一部は、メモリ220にロードされて、プロセッサ210によって実行される。
つまり、プロセッサ210は、OSを実行しながら、端末プログラムを実行する。
端末プログラムを実行して得られるデータは、メモリ220、補助記憶装置230、プロセッサ210内のレジスタまたはプロセッサ210内のキャッシュメモリといった記憶装置に記憶される。 The auxiliary storage device 903 stores a terminal program for causing a computer to function as a work
Further, the
That is, the
Data obtained by executing the terminal program is stored in a storage device such as a
メモリ220は記憶部221として機能する。但し、他の記憶装置が、メモリ220の代わりに、又は、メモリ220と共に、記憶部221として機能してもよい。
通信装置250は、通信部251として機能する。
入出力装置260は、表示部261と受付部262と警告部263として機能する。 Thememory 220 functions as the storage unit 221. However, another storage device may function as the storage unit 221 instead of the memory 220 or together with the memory 220.
Thecommunication device 250 functions as the communication unit 251.
The input /output device 260 functions as a display unit 261, a reception unit 262, and a warning unit 263.
通信装置250は、通信部251として機能する。
入出力装置260は、表示部261と受付部262と警告部263として機能する。 The
The
The input /
携帯端末200は、プロセッサ210を代替する複数のプロセッサを備えてもよい。複数のプロセッサは、プロセッサ210の役割を分担する。
The mobile terminal 200 may include a plurality of processors that replace the processor 210. The multiple processors share the role of the processor 210.
端末プログラムは、光ディスクまたはフラッシュメモリ等の不揮発性の記録媒体にコンピュータで読み取り可能に記録(格納)することができる。
The terminal program can be recorded (stored) in a computer readable manner on a non-volatile recording medium such as an optical disk or a flash memory.
図3に基づいて、作業評価装置300の構成を説明する。
作業評価装置300は、プロセッサ310とメモリ320と補助記憶装置330と通信装置340といったハードウェアを備えるコンピュータである。これらのハードウェアは、信号線を介して互いに接続されている。 The configuration of thework evaluation apparatus 300 will be described based on FIG.
Thework evaluation apparatus 300 is a computer including hardware such as a processor 310, a memory 320, an auxiliary storage device 330, and a communication device 340. These pieces of hardware are connected to each other via signal lines.
作業評価装置300は、プロセッサ310とメモリ320と補助記憶装置330と通信装置340といったハードウェアを備えるコンピュータである。これらのハードウェアは、信号線を介して互いに接続されている。 The configuration of the
The
プロセッサ310は、演算処理を行うICであり、他のハードウェアを制御する。例えば、プロセッサ310は、CPU、DSPまたはGPUである。
メモリ320は揮発性の記憶装置である。メモリ320は、主記憶装置またはメインメモリとも呼ばれる。例えば、メモリ320はRAMである。メモリ320に記憶されたデータは必要に応じて補助記憶装置330に保存される。
補助記憶装置330は不揮発性の記憶装置である。例えば、補助記憶装置330は、ROM、HDDまたはフラッシュメモリである。補助記憶装置330に記憶されたデータは必要に応じてメモリ320にロードされる。 Theprocessor 310 is an IC that performs arithmetic processing and controls other hardware. For example, processor 310 is a CPU, a DSP or a GPU.
Thememory 320 is a volatile storage device. The memory 320 is also referred to as main storage or main memory. For example, the memory 320 is a RAM. The data stored in the memory 320 is stored in the auxiliary storage device 330 as needed.
Theauxiliary storage device 330 is a non-volatile storage device. For example, the auxiliary storage device 330 is a ROM, an HDD or a flash memory. The data stored in the auxiliary storage device 330 is loaded into the memory 320 as needed.
メモリ320は揮発性の記憶装置である。メモリ320は、主記憶装置またはメインメモリとも呼ばれる。例えば、メモリ320はRAMである。メモリ320に記憶されたデータは必要に応じて補助記憶装置330に保存される。
補助記憶装置330は不揮発性の記憶装置である。例えば、補助記憶装置330は、ROM、HDDまたはフラッシュメモリである。補助記憶装置330に記憶されたデータは必要に応じてメモリ320にロードされる。 The
The
The
通信装置340は通信を行う装置、すなわち、レシーバ及びトランスミッタである。例えば、通信装置340は通信チップまたはNICである。
Communication device 340 is a device that communicates, ie, a receiver and a transmitter. For example, the communication device 340 is a communication chip or a NIC.
作業評価装置300は、現場データ取得部311と作業位置算出部312と作業位置判定部313といった要素を備える。これらの要素はソフトウェアで実現される。
The work evaluation apparatus 300 includes elements such as a site data acquisition unit 311, a work position calculation unit 312, and a work position determination unit 313. These elements are realized by software.
補助記憶装置903には、現場データ取得部311と作業位置算出部312と作業位置判定部313としてコンピュータを機能させるための作業評価プログラムが記憶されている。作業評価プログラムは、メモリ320にロードされて、プロセッサ310によって実行される。
さらに、補助記憶装置330にはOSが記憶されている。OSの少なくとも一部は、メモリ320にロードされて、プロセッサ310によって実行される。
つまり、プロセッサ310は、OSを実行しながら、作業評価プログラムを実行する。
作業評価プログラムを実行して得られるデータは、メモリ320、補助記憶装置330、プロセッサ310内のレジスタまたはプロセッサ310内のキャッシュメモリといった記憶装置に記憶される。 The auxiliary storage device 903 stores a work evaluation program for causing a computer to function as a sitedata acquisition unit 311, a work position calculation unit 312, and a work position determination unit 313. The work evaluation program is loaded into the memory 320 and executed by the processor 310.
Further, an OS is stored in theauxiliary storage device 330. At least a portion of the OS is loaded into memory 320 and executed by processor 310.
That is, theprocessor 310 executes the work evaluation program while executing the OS.
Data obtained by executing the work evaluation program is stored in a storage device such as amemory 320, an auxiliary storage device 330, a register in the processor 310 or a cache memory in the processor 310.
さらに、補助記憶装置330にはOSが記憶されている。OSの少なくとも一部は、メモリ320にロードされて、プロセッサ310によって実行される。
つまり、プロセッサ310は、OSを実行しながら、作業評価プログラムを実行する。
作業評価プログラムを実行して得られるデータは、メモリ320、補助記憶装置330、プロセッサ310内のレジスタまたはプロセッサ310内のキャッシュメモリといった記憶装置に記憶される。 The auxiliary storage device 903 stores a work evaluation program for causing a computer to function as a site
Further, an OS is stored in the
That is, the
Data obtained by executing the work evaluation program is stored in a storage device such as a
メモリ320は記憶部321として機能する。但し、他の記憶装置が、メモリ320の代わりに、又は、メモリ320と共に、記憶部321として機能してもよい。
通信装置340は通信部341として機能する。 Thememory 320 functions as the storage unit 321. However, another storage device may function as the storage unit 321 instead of the memory 320 or together with the memory 320.
Thecommunication device 340 functions as the communication unit 341.
通信装置340は通信部341として機能する。 The
The
作業評価装置300は、プロセッサ310を代替する複数のプロセッサを備えてもよい。複数のプロセッサは、プロセッサ310の役割を分担する。
The work evaluation apparatus 300 may include a plurality of processors that replace the processor 310. The multiple processors share the role of the processor 310.
作業評価プログラムは、光ディスクまたはフラッシュメモリ等の不揮発性の記録媒体にコンピュータで読み取り可能に記録(格納)することができる。
The work evaluation program can be recorded (stored) in a computer readable manner on a non-volatile recording medium such as an optical disk or a flash memory.
***動作の説明***
作業評価システム100の動作(特に、作業評価装置300の動作)は作業評価方法に相当する。また、作業評価方法の手順は作業評価プログラムの手順に相当する。 *** Description of operation ***
The operation of the work evaluation system 100 (in particular, the operation of the work evaluation apparatus 300) corresponds to a work evaluation method. The procedure of the work evaluation method corresponds to the procedure of the work evaluation program.
作業評価システム100の動作(特に、作業評価装置300の動作)は作業評価方法に相当する。また、作業評価方法の手順は作業評価プログラムの手順に相当する。 *** Description of operation ***
The operation of the work evaluation system 100 (in particular, the operation of the work evaluation apparatus 300) corresponds to a work evaluation method. The procedure of the work evaluation method corresponds to the procedure of the work evaluation program.
作業評価方法は作業後に実行される。
作業場所において、作業者101は携帯端末200を所持する。そして、携帯端末200は各時刻のセンサデータを記憶する。具体的には、センサ240が時刻毎にセンサデータを生成する。そして、記憶部221が、各時刻のセンサデータを記憶する。センサデータは、加速度、角速度および気圧などを示す。 The work evaluation method is performed after work.
The worker 101 holds theportable terminal 200 at the work place. And portable terminal 200 memorizes sensor data of each time. Specifically, the sensor 240 generates sensor data at each time. Then, the storage unit 221 stores sensor data of each time. The sensor data indicates acceleration, angular velocity, barometric pressure, and the like.
作業場所において、作業者101は携帯端末200を所持する。そして、携帯端末200は各時刻のセンサデータを記憶する。具体的には、センサ240が時刻毎にセンサデータを生成する。そして、記憶部221が、各時刻のセンサデータを記憶する。センサデータは、加速度、角速度および気圧などを示す。 The work evaluation method is performed after work.
The worker 101 holds the
図4に基づいて、作業評価方法を説明する。
ステップS110において、作業データ生成部211は作業データを生成する。
作業データは、現場識別子と作業識別子と作業時刻とを含む。
現場識別子は、作業現場を識別する。
作業識別子は、作業内容を識別する。
作業時刻は、作業が行われた時刻に相当する。具体的には、作業時刻は作業の終了時刻に相当する。 The work evaluation method will be described based on FIG.
In step S110, the workdata generation unit 211 generates work data.
The work data includes a site identifier, a work identifier, and a work time.
The site identifier identifies the work site.
The work identifier identifies the work content.
The work time corresponds to the time when the work was performed. Specifically, the work time corresponds to the work end time.
ステップS110において、作業データ生成部211は作業データを生成する。
作業データは、現場識別子と作業識別子と作業時刻とを含む。
現場識別子は、作業現場を識別する。
作業識別子は、作業内容を識別する。
作業時刻は、作業が行われた時刻に相当する。具体的には、作業時刻は作業の終了時刻に相当する。 The work evaluation method will be described based on FIG.
In step S110, the work
The work data includes a site identifier, a work identifier, and a work time.
The site identifier identifies the work site.
The work identifier identifies the work content.
The work time corresponds to the time when the work was performed. Specifically, the work time corresponds to the work end time.
図5に基づいて、作業データ取得処理(S110)の手順を説明する。
ステップS111において、表示部261は、結果入力画面を表示する。
結果入力画面は、現場識別子と作業識別子との組毎に結果入力欄を有する。
結果入力欄は、作業結果が入力される欄であり、現場識別子と作業識別子との組に対応付けられている。 The procedure of the work data acquisition process (S110) will be described based on FIG.
In step S111, thedisplay unit 261 displays a result input screen.
The result input screen has a result input field for each set of site identifier and operation identifier.
The result input field is a field into which the work result is input, and is associated with a combination of a site identifier and a work identifier.
ステップS111において、表示部261は、結果入力画面を表示する。
結果入力画面は、現場識別子と作業識別子との組毎に結果入力欄を有する。
結果入力欄は、作業結果が入力される欄であり、現場識別子と作業識別子との組に対応付けられている。 The procedure of the work data acquisition process (S110) will be described based on FIG.
In step S111, the
The result input screen has a result input field for each set of site identifier and operation identifier.
The result input field is a field into which the work result is input, and is associated with a combination of a site identifier and a work identifier.
ステップS112において、作業者101は、携帯端末200の入力装置を操作することによって、結果入力欄を選択して結果入力欄に作業結果を入力する。
受付部262は、選択された結果入力欄に入力された作業結果を受け付ける。
例えば、作業結果は、機器の点検結果、ネジ及びボルトのトルク値、センサの感度値などである。 In step S112, the operator 101 operates the input device of theportable terminal 200 to select the result input field and input the work result in the result input field.
The receivingunit 262 receives the work result input in the selected result input field.
For example, the operation result is the inspection result of the device, torque values of screws and bolts, sensitivity values of sensors, and the like.
受付部262は、選択された結果入力欄に入力された作業結果を受け付ける。
例えば、作業結果は、機器の点検結果、ネジ及びボルトのトルク値、センサの感度値などである。 In step S112, the operator 101 operates the input device of the
The receiving
For example, the operation result is the inspection result of the device, torque values of screws and bolts, sensitivity values of sensors, and the like.
ステップS113において、作業データ生成部211は作業データを生成する。そして、記憶部221は作業データを記憶する。
作業データは、受け付けられた作業結果と、選択された結果入力欄に対応付けられた現場識別子と、選択された結果入力欄に対応付けられた作業結果とを含む。
さらに、作業データは作業時刻を含む。例えば、作業時刻は、作業結果が受け付けられた時刻である。 In step S113, the workdata generation unit 211 generates work data. Then, the storage unit 221 stores work data.
The work data includes the received work result, the work site identifier associated with the selected result input field, and the work result associated with the selected result input field.
Furthermore, work data includes work time. For example, the work time is the time when the work result is accepted.
作業データは、受け付けられた作業結果と、選択された結果入力欄に対応付けられた現場識別子と、選択された結果入力欄に対応付けられた作業結果とを含む。
さらに、作業データは作業時刻を含む。例えば、作業時刻は、作業結果が受け付けられた時刻である。 In step S113, the work
The work data includes the received work result, the work site identifier associated with the selected result input field, and the work result associated with the selected result input field.
Furthermore, work data includes work time. For example, the work time is the time when the work result is accepted.
ステップS114において、通信部251は、作業データを作業評価装置300へ送信する。
In step S114, the communication unit 251 transmits work data to the work evaluation apparatus 300.
ステップS115において、通信部341は、作業データを携帯端末200から受信する。そして、記憶部321は作業データを記憶する。
In step S115, the communication unit 341 receives work data from the portable terminal 200. Then, the storage unit 321 stores work data.
図4に戻り、ステップS120を説明する。
ステップS120において、作業位置算出部312は、センサ240によって得られる各時刻のセンサデータに基づいて、作業位置情報を算出する。
作業位置情報は、作業位置の位置情報である。
作業位置は、作業時刻における携帯端末200の位置である。
位置情報は、位置を示す情報である。具体的には、位置情報は3次元の座標値である。 Referring back to FIG. 4, step S120 will be described.
In step S120, the workposition calculation unit 312 calculates work position information based on the sensor data of each time obtained by the sensor 240.
The work position information is position information of the work position.
The work position is the position of themobile terminal 200 at the work time.
Position information is information indicating a position. Specifically, the position information is a three-dimensional coordinate value.
ステップS120において、作業位置算出部312は、センサ240によって得られる各時刻のセンサデータに基づいて、作業位置情報を算出する。
作業位置情報は、作業位置の位置情報である。
作業位置は、作業時刻における携帯端末200の位置である。
位置情報は、位置を示す情報である。具体的には、位置情報は3次元の座標値である。 Referring back to FIG. 4, step S120 will be described.
In step S120, the work
The work position information is position information of the work position.
The work position is the position of the
Position information is information indicating a position. Specifically, the position information is a three-dimensional coordinate value.
図6に基づいて、作業位置算出処理(S120)の手順を説明する。
ステップS121において、通信部251は、各時刻のセンサデータを作業評価装置300へ送信する。 The procedure of the work position calculation process (S120) will be described based on FIG.
In step S121, thecommunication unit 251 transmits sensor data of each time to the work evaluation device 300.
ステップS121において、通信部251は、各時刻のセンサデータを作業評価装置300へ送信する。 The procedure of the work position calculation process (S120) will be described based on FIG.
In step S121, the
ステップS122において、通信部341は、各時刻のセンサデータを携帯端末200から受信する。そして、記憶部321は、各時刻のセンサデータを記憶する。
In step S122, the communication unit 341 receives sensor data of each time from the portable terminal 200. Then, the storage unit 321 stores sensor data of each time.
ステップS123において、作業位置算出部312は、各時刻のセンサデータを用いて自律航法を行うことによって、各時刻における携帯端末200の位置情報を算出する。自律航法は慣性航法ともいう。
In step S123, the work position calculation unit 312 calculates the position information of the portable terminal 200 at each time by performing the autonomous navigation using the sensor data of each time. Autonomous navigation is also called inertial navigation.
自律航法において、作業位置算出部312は、さらに初期位置情報を用いる。
初期位置情報は、初期位置を示す情報である。
初期位置は、基点となる位置である。 In the autonomous navigation, the workposition calculation unit 312 further uses initial position information.
The initial position information is information indicating an initial position.
The initial position is a position to be a base point.
初期位置情報は、初期位置を示す情報である。
初期位置は、基点となる位置である。 In the autonomous navigation, the work
The initial position information is information indicating an initial position.
The initial position is a position to be a base point.
具体的には、作業位置算出部312は、ビーコンとバーコードと経路マッチングと位置入力と画像解析との少なくともいずれかによって初期位置情報を取得する。以下の説明において、初期位置データは初期位置情報を含むデータである。
Specifically, the work position calculation unit 312 acquires initial position information by at least one of a beacon, a barcode, path matching, position input, and image analysis. In the following description, initial position data is data including initial position information.
例えば、作業位置算出部312は、ビーコンによって初期位置情報を以下のように取得する。
各作業場所にはビーコン装置が設置される。ビーコン装置は初期位置情報を含んだビーコンを送信する。通信部251はビーコンをビーコン装置から受信する。初期位置データ生成部212はビーコンから初期位置情報を取得し、初期位置データを生成する。通信部251は初期位置データを作業評価装置300へ送信する。通信部341は初期位置データを携帯端末200から受信する。そして、作業位置算出部312は初期位置データから初期位置情報を取得する。 For example, the workposition calculation unit 312 acquires initial position information by beacon as follows.
A beacon device is installed at each work place. The beacon device transmits a beacon including initial position information. Thecommunication unit 251 receives a beacon from the beacon device. The initial position data generation unit 212 acquires initial position information from the beacon and generates initial position data. The communication unit 251 transmits the initial position data to the work evaluation apparatus 300. The communication unit 341 receives initial position data from the portable terminal 200. Then, the work position calculation unit 312 acquires initial position information from the initial position data.
各作業場所にはビーコン装置が設置される。ビーコン装置は初期位置情報を含んだビーコンを送信する。通信部251はビーコンをビーコン装置から受信する。初期位置データ生成部212はビーコンから初期位置情報を取得し、初期位置データを生成する。通信部251は初期位置データを作業評価装置300へ送信する。通信部341は初期位置データを携帯端末200から受信する。そして、作業位置算出部312は初期位置データから初期位置情報を取得する。 For example, the work
A beacon device is installed at each work place. The beacon device transmits a beacon including initial position information. The
例えば、作業位置算出部312は、バーコードによって初期位置情報を以下のように取得する。
各作業場所にはバーコードが記される。バーコードには初期位置情報が登録されている。作業者101は、携帯端末200のカメラによって、バーコードを撮影する。初期位置データ生成部212はバーコードから初期位置情報を読み取り、初期位置データを生成する。通信部251は初期位置データを作業評価装置300へ送信する。通信部341は初期位置データを携帯端末200から受信する。そして、作業位置算出部312は初期位置データから初期位置情報を取得する。 For example, the workposition calculation unit 312 acquires initial position information by barcode as follows.
A barcode is written on each work place. Initial position information is registered in the barcode. The worker 101 shoots a bar code with the camera of themobile terminal 200. The initial position data generation unit 212 reads initial position information from the barcode and generates initial position data. The communication unit 251 transmits the initial position data to the work evaluation apparatus 300. The communication unit 341 receives initial position data from the portable terminal 200. Then, the work position calculation unit 312 acquires initial position information from the initial position data.
各作業場所にはバーコードが記される。バーコードには初期位置情報が登録されている。作業者101は、携帯端末200のカメラによって、バーコードを撮影する。初期位置データ生成部212はバーコードから初期位置情報を読み取り、初期位置データを生成する。通信部251は初期位置データを作業評価装置300へ送信する。通信部341は初期位置データを携帯端末200から受信する。そして、作業位置算出部312は初期位置データから初期位置情報を取得する。 For example, the work
A barcode is written on each work place. Initial position information is registered in the barcode. The worker 101 shoots a bar code with the camera of the
例えば、作業位置算出部312は、経路マッチングによって初期位置情報を以下のように取得する。
後述する現場データは現場マップを含む。現場マップは、作業現場のマップであり、各通路の配置と各地点の位置情報とを示す。作業位置算出部312は、各時刻のセンサデータを用いて自律航法を行うことによって、携帯端末200の移動経路を算出する。次に、作業位置算出部312は、現場マップに基づいて、作業現場内の通路から携帯端末200の移動経路に合致する移動通路を抽出する。そして、作業位置算出部312は、移動通路における開始地点の位置情報を現場マップから取得する。取得される位置情報が初期位置情報である。 For example, the workposition calculation unit 312 acquires initial position information as follows by route matching.
The site data to be described later includes a site map. The site map is a map of the work site and shows the arrangement of each passage and the position information of each point. The workposition calculation unit 312 calculates the movement route of the mobile terminal 200 by performing autonomous navigation using sensor data of each time. Next, based on the site map, the work position calculation unit 312 extracts a movement path that matches the movement path of the portable terminal 200 from the path in the work site. Then, the work position calculation unit 312 acquires position information of the start point in the moving path from the site map. The acquired position information is initial position information.
後述する現場データは現場マップを含む。現場マップは、作業現場のマップであり、各通路の配置と各地点の位置情報とを示す。作業位置算出部312は、各時刻のセンサデータを用いて自律航法を行うことによって、携帯端末200の移動経路を算出する。次に、作業位置算出部312は、現場マップに基づいて、作業現場内の通路から携帯端末200の移動経路に合致する移動通路を抽出する。そして、作業位置算出部312は、移動通路における開始地点の位置情報を現場マップから取得する。取得される位置情報が初期位置情報である。 For example, the work
The site data to be described later includes a site map. The site map is a map of the work site and shows the arrangement of each passage and the position information of each point. The work
例えば、作業位置算出部312は、画像解析によって初期位置情報を以下のように取得する。
作業者101は、作業位置への移動を開始するときに、携帯端末200のカメラによって移動開始地点を撮影する。通信部251は、撮影によって得られた画像を作業評価装置300へ送信する。通信部341は画像を携帯端末200から受信する。後述する現場データは現場マップを含む。現場マップは、作業現場のマップであり、各地点の配置および位置情報を示す。作業位置算出部312は、画像を解析することによって、移動開始地点を検出する。そして、作業位置算出部312は、移動開始地点の位置情報を現場マップから取得する。取得される位置情報が初期位置情報である。 For example, the workposition calculation unit 312 acquires initial position information as follows by image analysis.
When the worker 101 starts moving to a work position, the camera of theportable terminal 200 shoots a movement start point. The communication unit 251 transmits the image obtained by photographing to the work evaluation apparatus 300. The communication unit 341 receives an image from the portable terminal 200. The site data to be described later includes a site map. The site map is a map of the work site and shows the location and position information of each point. The work position calculation unit 312 detects the movement start point by analyzing the image. Then, the work position calculation unit 312 acquires position information of the movement start point from the site map. The acquired position information is initial position information.
作業者101は、作業位置への移動を開始するときに、携帯端末200のカメラによって移動開始地点を撮影する。通信部251は、撮影によって得られた画像を作業評価装置300へ送信する。通信部341は画像を携帯端末200から受信する。後述する現場データは現場マップを含む。現場マップは、作業現場のマップであり、各地点の配置および位置情報を示す。作業位置算出部312は、画像を解析することによって、移動開始地点を検出する。そして、作業位置算出部312は、移動開始地点の位置情報を現場マップから取得する。取得される位置情報が初期位置情報である。 For example, the work
When the worker 101 starts moving to a work position, the camera of the
ステップS124において、作業位置算出部312は、ステップS110で取得された作業データから作業時刻を取得する。
In step S124, the work position calculation unit 312 acquires work time from the work data acquired in step S110.
ステップS125において、作業位置算出部312は、各時刻における携帯端末200の位置情報から、作業時刻における携帯端末200の位置情報を取得する。取得される位置情報が作業位置情報である。
In step S125, the work position calculation unit 312 acquires the position information of the portable terminal 200 at the work time from the position information of the portable terminal 200 at each time. The acquired position information is work position information.
図4に戻り、ステップS130を説明する。
ステップS130において、現場データ取得部311は、現場データベース111から該当現場データを取得する。
該当現場データは、ステップS110で取得された作業データに含まれる現場識別子に対応する現場データである。 Referring back to FIG. 4, step S130 will be described.
In step S130, the on-sitedata acquisition unit 311 acquires corresponding on-site data from the on-site database 111.
The corresponding site data is site data corresponding to the site identifier included in the work data acquired in step S110.
ステップS130において、現場データ取得部311は、現場データベース111から該当現場データを取得する。
該当現場データは、ステップS110で取得された作業データに含まれる現場識別子に対応する現場データである。 Referring back to FIG. 4, step S130 will be described.
In step S130, the on-site
The corresponding site data is site data corresponding to the site identifier included in the work data acquired in step S110.
現場データベース111は、現場識別子と作業識別子との組毎に現場データを有する。
現場データは、標準位置情報を含む。
標準位置情報は、標準位置の位置情報である。
標準位置は、作業が行われる位置として決められた位置である。 Thesite database 111 has site data for each pair of the site identifier and the operation identifier.
The field data includes standard position information.
Standard position information is position information of a standard position.
The standard position is a position determined as a position where work is performed.
現場データは、標準位置情報を含む。
標準位置情報は、標準位置の位置情報である。
標準位置は、作業が行われる位置として決められた位置である。 The
The field data includes standard position information.
Standard position information is position information of a standard position.
The standard position is a position determined as a position where work is performed.
図7に基づいて、現場データ取得処理(S130)の手順を説明する。
ステップS131において、現場データ取得部311は、ステップS110で取得された作業データから、現場識別子と作業識別子との組を取得する。 The procedure of on-site data acquisition processing (S130) will be described based on FIG.
In step S131, the sitedata acquisition unit 311 acquires a pair of a site identifier and a task identifier from the work data acquired in step S110.
ステップS131において、現場データ取得部311は、ステップS110で取得された作業データから、現場識別子と作業識別子との組を取得する。 The procedure of on-site data acquisition processing (S130) will be described based on FIG.
In step S131, the site
ステップS132において、現場データ取得部311は、通信部341を介してデータサーバ110と通信を行うことによって、ステップS131で取得された組に対応する現場データを現場データベース111から取得する。取得される現場データが該当現場データである。
In step S 132, the site data acquisition unit 311 communicates with the data server 110 via the communication unit 341 to acquire site data corresponding to the set acquired in step S 131 from the site database 111. The acquired site data is the corresponding site data.
図4に戻り、ステップS140を説明する。
ステップS140において、作業位置判定部313は、該当現場データに含まれる標準位置情報に基づいて、作業位置情報の適否を判定する。 Referring back to FIG. 4, step S140 will be described.
In step S140, the workposition determination unit 313 determines the propriety of the work position information based on the standard position information included in the relevant site data.
ステップS140において、作業位置判定部313は、該当現場データに含まれる標準位置情報に基づいて、作業位置情報の適否を判定する。 Referring back to FIG. 4, step S140 will be described.
In step S140, the work
図8に基づいて、作業位置判定処理(S140)の手順を説明する。
ステップS141において、作業位置判定部313は、該当現場データから標準位置情報を取得する。 The procedure of the work position determination process (S140) will be described based on FIG.
In step S141, the workposition determination unit 313 acquires standard position information from the relevant site data.
ステップS141において、作業位置判定部313は、該当現場データから標準位置情報を取得する。 The procedure of the work position determination process (S140) will be described based on FIG.
In step S141, the work
ステップS142において、作業位置判定部313は、標準位置情報と作業位置情報とを用いて、位置誤差を算出する。
位置誤差は、標準位置から作業位置までの距離である。 In step S142, the workposition determination unit 313 calculates a position error using the standard position information and the work position information.
The position error is the distance from the standard position to the work position.
位置誤差は、標準位置から作業位置までの距離である。 In step S142, the work
The position error is the distance from the standard position to the work position.
ステップS143において、作業位置判定部313は、位置誤差が許容範囲内の値であるか判定する。この許容範囲は、位置誤差用に予め決められた範囲である。
位置誤差が許容範囲内の値である場合、作業位置情報は適切である。
位置誤差が許容範囲外の値である場合、作業位置情報は適切でない。 In step S143, the workposition determination unit 313 determines whether the position error is a value within the allowable range. This allowable range is a range predetermined for position error.
If the position error is a value within the allowable range, the work position information is appropriate.
If the position error is out of the allowable range, the work position information is not appropriate.
位置誤差が許容範囲内の値である場合、作業位置情報は適切である。
位置誤差が許容範囲外の値である場合、作業位置情報は適切でない。 In step S143, the work
If the position error is a value within the allowable range, the work position information is appropriate.
If the position error is out of the allowable range, the work position information is not appropriate.
図4に戻り、ステップS150を説明する。
ステップS150において、警告部263は、作業位置情報が適切でない場合に警告を発する。 Referring back to FIG. 4, step S150 will be described.
In step S150, thewarning unit 263 issues a warning when the work position information is not appropriate.
ステップS150において、警告部263は、作業位置情報が適切でない場合に警告を発する。 Referring back to FIG. 4, step S150 will be described.
In step S150, the
図9に基づいて、警告処理(S150)の手順を説明する。
ステップS151において、通信部341は、判定結果を携帯端末200へ送信する。判定結果は、作業位置情報の適否を示す。 The procedure of the warning process (S150) will be described based on FIG.
In step S151, thecommunication unit 341 transmits the determination result to the portable terminal 200. The determination result indicates the propriety of the work position information.
ステップS151において、通信部341は、判定結果を携帯端末200へ送信する。判定結果は、作業位置情報の適否を示す。 The procedure of the warning process (S150) will be described based on FIG.
In step S151, the
ステップS152において、通信部251は、判定結果を携帯端末200から受信する。
In step S152, the communication unit 251 receives the determination result from the portable terminal 200.
ステップS153において、警告判定部213は、判定結果を参照することによって、作業位置情報の適否を判定する。
作業位置情報が適切である場合、処理は終了する。
作業位置情報が適切でない場合、処理はステップS154に進む。 In step S153, thewarning determination unit 213 determines whether the work position information is appropriate by referring to the determination result.
If the work position information is appropriate, the process ends.
If the work position information is not appropriate, the process proceeds to step S154.
作業位置情報が適切である場合、処理は終了する。
作業位置情報が適切でない場合、処理はステップS154に進む。 In step S153, the
If the work position information is appropriate, the process ends.
If the work position information is not appropriate, the process proceeds to step S154.
ステップS154において、警告部263は警告を発する。
具体的には、警告部263は、警告メッセージを表示する。
警告メッセージは、作業の是正を促すメッセージである。 In step S154, thewarning unit 263 issues a warning.
Specifically, thewarning unit 263 displays a warning message.
The warning message is a message prompting to correct the work.
具体的には、警告部263は、警告メッセージを表示する。
警告メッセージは、作業の是正を促すメッセージである。 In step S154, the
Specifically, the
The warning message is a message prompting to correct the work.
***実施の形態1の効果***
作業評価システム100では、携帯端末200への作業結果の入力をきっかけにして作業データが生成され、センサ240を利用して作業位置情報が算出される。そのため、作業評価システム100では、作業対象を特定する情報が登録されたバーコードまたはICタグ等を各作業対象に取り付けることなく、作業位置情報の適否を判定することができる。 *** Effect of Embodiment 1 ***
In the work evaluation system 100, work data is generated triggered by an input of a work result to theportable terminal 200, and work position information is calculated using the sensor 240. Therefore, the work evaluation system 100 can determine the propriety of the work position information without attaching a bar code, an IC tag or the like in which the information specifying the work target is registered to each work target.
作業評価システム100では、携帯端末200への作業結果の入力をきっかけにして作業データが生成され、センサ240を利用して作業位置情報が算出される。そのため、作業評価システム100では、作業対象を特定する情報が登録されたバーコードまたはICタグ等を各作業対象に取り付けることなく、作業位置情報の適否を判定することができる。 *** Effect of Embodiment 1 ***
In the work evaluation system 100, work data is generated triggered by an input of a work result to the
***他の構成***
作業評価装置300は、複数の装置で構成されてもよい。 *** Other configuration ***
Thework evaluation device 300 may be configured by a plurality of devices.
作業評価装置300は、複数の装置で構成されてもよい。 *** Other configuration ***
The
現場データ取得部311と作業位置算出部312と作業位置判定部313といった作業評価装置300の要素は、携帯端末200に備えてもよい。
現場データベース111は、作業評価装置300または携帯端末200に記憶されてもよい。 Elements of thework evaluation apparatus 300 such as the site data acquisition unit 311, the work position calculation unit 312, and the work position determination unit 313 may be included in the mobile terminal 200.
Thesite database 111 may be stored in the work evaluation device 300 or the mobile terminal 200.
現場データベース111は、作業評価装置300または携帯端末200に記憶されてもよい。 Elements of the
The
作業評価装置300とデータサーバ110とは、インターネット以外のネットワーク109で互いに接続されてもよい。例えば、作業評価装置300とデータサーバ110とは、イントラネット、LAN(Local Area Network)またはケーブルで互いに接続されてもよい。
The work evaluation apparatus 300 and the data server 110 may be connected to each other by a network 109 other than the Internet. For example, the work evaluation apparatus 300 and the data server 110 may be connected to each other by an intranet, a LAN (Local Area Network), or a cable.
作業位置算出部312は、各時刻のセンサデータを用いて作業時刻における携帯端末200の位置情報を算出し、作業時刻における携帯端末200の位置情報を現場範囲内の位置を示す位置情報に補正してもよい。補正後の位置情報は作業位置情報として使用される。
現場範囲は、作業現場の範囲である。具体的には、現場範囲は、建物内の空間または屋上より低い場所などである。
例えば、現場データが現場マップを含み、現場マップが現場範囲を示す。そして、作業位置算出部312は、現場マップが示す現場範囲に基づいて作業時刻における携帯端末200の位置情報を補正する。
さらに、作業位置算出部312は、初期位置情報および各時刻における携帯端末200の位置情報を補正してもよい。 The workposition calculation unit 312 calculates the position information of the portable terminal 200 at the work time using the sensor data of each time, and corrects the position information of the portable terminal 200 at the work time to position information indicating the position within the site range. May be The corrected position information is used as work position information.
The site range is the scope of the work site. Specifically, the site range is a space in a building or a place lower than the roof.
For example, site data includes site maps, and site maps indicate site coverage. Then, the workposition calculation unit 312 corrects the position information of the portable terminal 200 at the work time based on the site range indicated by the site map.
Furthermore, the workposition calculation unit 312 may correct the initial position information and the position information of the portable terminal 200 at each time.
現場範囲は、作業現場の範囲である。具体的には、現場範囲は、建物内の空間または屋上より低い場所などである。
例えば、現場データが現場マップを含み、現場マップが現場範囲を示す。そして、作業位置算出部312は、現場マップが示す現場範囲に基づいて作業時刻における携帯端末200の位置情報を補正する。
さらに、作業位置算出部312は、初期位置情報および各時刻における携帯端末200の位置情報を補正してもよい。 The work
The site range is the scope of the work site. Specifically, the site range is a space in a building or a place lower than the roof.
For example, site data includes site maps, and site maps indicate site coverage. Then, the work
Furthermore, the work
作業位置算出部312は、作業時刻以外の時刻における携帯端末200の位置情報を算出せずに、作業位置情報だけを算出してもよい。
例えば、作業位置算出部312は、作業時刻における気圧センサのセンサデータを用いて、作業時刻における携帯端末200の高さ情報を算出してもよい。 The workposition calculation unit 312 may calculate only work position information without calculating position information of the mobile terminal 200 at times other than the work time.
For example, the workposition calculation unit 312 may calculate the height information of the portable terminal 200 at the work time using the sensor data of the air pressure sensor at the work time.
例えば、作業位置算出部312は、作業時刻における気圧センサのセンサデータを用いて、作業時刻における携帯端末200の高さ情報を算出してもよい。 The work
For example, the work
センサ240は、携帯端末200の外部に設けてもよい。
例えば、作業者101は、携帯端末200と通信するセンサ端末を携帯端末200と共に所持する。そして、センサ端末がセンサ240を備える。 Thesensor 240 may be provided outside the mobile terminal 200.
For example, the worker 101 holds the sensor terminal communicating with themobile terminal 200 together with the mobile terminal 200. Then, the sensor terminal includes the sensor 240.
例えば、作業者101は、携帯端末200と通信するセンサ端末を携帯端末200と共に所持する。そして、センサ端末がセンサ240を備える。 The
For example, the worker 101 holds the sensor terminal communicating with the
位置情報は、1次元または2次元の情報であってもよい。
例えば、エレベーターまたは送電鉄塔での作業では高さ情報が重要である。また、レール上での作業では距離情報が重要である。高さ情報または距離情報が重要である場合、位置情報は、高さ情報または位置情報のような1次元の情報であればよい。高さ情報は、気圧センサのセンサデータを用いて算出される。
例えば、1フロアでの作業では高さ情報は重要でない。高さ情報が重要でない場合、位置情報は2次元の情報であればよい。 The position information may be one-dimensional or two-dimensional information.
For example, height information is important when working with elevators or transmission towers. In addition, distance information is important in work on the rail. When height information or distance information is important, the position information may be one-dimensional information such as height information or position information. The height information is calculated using sensor data of an air pressure sensor.
For example, height information is not important when working on one floor. If the height information is not important, the position information may be two-dimensional information.
例えば、エレベーターまたは送電鉄塔での作業では高さ情報が重要である。また、レール上での作業では距離情報が重要である。高さ情報または距離情報が重要である場合、位置情報は、高さ情報または位置情報のような1次元の情報であればよい。高さ情報は、気圧センサのセンサデータを用いて算出される。
例えば、1フロアでの作業では高さ情報は重要でない。高さ情報が重要でない場合、位置情報は2次元の情報であればよい。 The position information may be one-dimensional or two-dimensional information.
For example, height information is important when working with elevators or transmission towers. In addition, distance information is important in work on the rail. When height information or distance information is important, the position information may be one-dimensional information such as height information or position information. The height information is calculated using sensor data of an air pressure sensor.
For example, height information is not important when working on one floor. If the height information is not important, the position information may be two-dimensional information.
警告メッセージは、携帯端末200以外のディスプレイ装置に表示されてもよい。その場合、通信装置250が警告部263として機能し、警告部263が携帯端末200以外のディスプレイ装置に警告メッセージを送信する。そして、携帯端末200以外のディスプレイ装置が警告メッセージを表示する。具体的には、作業者101が携帯端末200以外のディスプレイ装置を身に付け、そのディスプレイ装置が警告メッセージを表示する。携帯端末200以外のディスプレイ装置の一例は、作業者101が装着するヘッドマウントディスプレイである。
The warning message may be displayed on a display device other than the mobile terminal 200. In that case, the communication device 250 functions as the warning unit 263, and the warning unit 263 transmits a warning message to display devices other than the portable terminal 200. Then, the display devices other than the mobile terminal 200 display a warning message. Specifically, the worker 101 wears a display device other than the portable terminal 200, and the display device displays a warning message. An example of a display device other than the mobile terminal 200 is a head mounted display worn by the worker 101.
警告部263は、ディスプレイによる表示以外の方法で警告を発してもよい。
例えば、警告部263は、スピーカーによる音声出力、バイブレーターによる振動または通信装置250によるメール送信によって警告を発する。 Thewarning unit 263 may issue a warning by a method other than display by a display.
For example, thewarning unit 263 issues a warning by voice output by a speaker, vibration by a vibrator, or e-mail transmission by the communication device 250.
例えば、警告部263は、スピーカーによる音声出力、バイブレーターによる振動または通信装置250によるメール送信によって警告を発する。 The
For example, the
作業者101は人間ではなくロボットであってもよい。
つまり、作業評価システム100が作業ロボットを備え、作業ロボットが携帯端末200を備えてもよい。例えば、作業ロボットは、携帯端末200を所持または内蔵する。 The worker 101 may not be a human but a robot.
That is, the work evaluation system 100 may include the work robot, and the work robot may include theportable terminal 200. For example, the work robot holds or incorporates the portable terminal 200.
つまり、作業評価システム100が作業ロボットを備え、作業ロボットが携帯端末200を備えてもよい。例えば、作業ロボットは、携帯端末200を所持または内蔵する。 The worker 101 may not be a human but a robot.
That is, the work evaluation system 100 may include the work robot, and the work robot may include the
実施の形態2.
作業時間の適否を判定する形態について、主に実施の形態1と異なる点を図10から図16に基づいて説明する。 Second Embodiment
Regarding the form of determining the suitability of the working time, mainly the points different from the first embodiment will be described based on FIG. 10 to FIG.
作業時間の適否を判定する形態について、主に実施の形態1と異なる点を図10から図16に基づいて説明する。 Second Embodiment
Regarding the form of determining the suitability of the working time, mainly the points different from the first embodiment will be described based on FIG. 10 to FIG.
***構成の説明***
図10に基づいて、作業評価システム100の構成を説明する。
データサーバ110は、時間式データベース112を記憶している。
時間式データベース112は、現場識別子と作業識別子との組毎に時間式を有する。
時間式は、標準時間を算出するための式であり、サイズ変数を有する。
サイズ変数は、後述する現場サイズ値が代入される変数である。
他の構成は、実施の形態1における構成(図1参照)と同じである。 *** Description of the configuration ***
The configuration of the work evaluation system 100 will be described based on FIG.
Thedata server 110 stores a time expression database 112.
Thetime expression database 112 has a time expression for each set of site identifier and work identifier.
The time equation is an equation for calculating the standard time, and has a size variable.
The size variable is a variable to which a field size value described later is substituted.
The other configuration is the same as the configuration in the first embodiment (see FIG. 1).
図10に基づいて、作業評価システム100の構成を説明する。
データサーバ110は、時間式データベース112を記憶している。
時間式データベース112は、現場識別子と作業識別子との組毎に時間式を有する。
時間式は、標準時間を算出するための式であり、サイズ変数を有する。
サイズ変数は、後述する現場サイズ値が代入される変数である。
他の構成は、実施の形態1における構成(図1参照)と同じである。 *** Description of the configuration ***
The configuration of the work evaluation system 100 will be described based on FIG.
The
The
The time equation is an equation for calculating the standard time, and has a size variable.
The size variable is a variable to which a field size value described later is substituted.
The other configuration is the same as the configuration in the first embodiment (see FIG. 1).
携帯端末200の構成は、実施の形態2における構成(図2参照)と同じである。
The configuration of portable terminal 200 is the same as that of the second embodiment (see FIG. 2).
図11に基づいて、作業評価装置300の構成を説明する。
作業評価装置300は、実施の形態1で説明した要素(図3参照)に加えて、作業時間算出部314と標準時間算出部315と作業時間判定部316といった要素を備える。
作業評価プログラムは、現場データ取得部311から作業位置判定部313に加えて作業時間算出部314と標準時間算出部315と作業時間判定部316としてコンピュータを機能させる。 The configuration of thework evaluation apparatus 300 will be described based on FIG.
In addition to the elements (see FIG. 3) described in the first embodiment, thework evaluation apparatus 300 includes elements such as a work time calculation unit 314, a standard time calculation unit 315, and a work time determination unit 316.
The work evaluation program causes the computer to function as a worktime calculation unit 314, a standard time calculation unit 315, and a work time determination unit 316 in addition to the work position determination unit 313 from the site data acquisition unit 311.
作業評価装置300は、実施の形態1で説明した要素(図3参照)に加えて、作業時間算出部314と標準時間算出部315と作業時間判定部316といった要素を備える。
作業評価プログラムは、現場データ取得部311から作業位置判定部313に加えて作業時間算出部314と標準時間算出部315と作業時間判定部316としてコンピュータを機能させる。 The configuration of the
In addition to the elements (see FIG. 3) described in the first embodiment, the
The work evaluation program causes the computer to function as a work
***動作の説明***
図12に基づいて、作業評価方法を説明する。
ステップS110において、作業データ生成部211は作業データを生成する。
ステップS110の手順は、実施の形態1(図5参照)で説明した通りである。 *** Description of operation ***
The work evaluation method will be described based on FIG.
In step S110, the workdata generation unit 211 generates work data.
The procedure of step S110 is as described in the first embodiment (see FIG. 5).
図12に基づいて、作業評価方法を説明する。
ステップS110において、作業データ生成部211は作業データを生成する。
ステップS110の手順は、実施の形態1(図5参照)で説明した通りである。 *** Description of operation ***
The work evaluation method will be described based on FIG.
In step S110, the work
The procedure of step S110 is as described in the first embodiment (see FIG. 5).
ステップS120において、作業位置算出部312は、センサ240によって得られる各時刻のセンサデータに基づいて、作業位置情報を算出する。
ステップS130において、現場データ取得部311は、現場データベース111から該当現場データを取得する。
ステップS140において、作業位置判定部313は、該当現場データに含まれる標準位置情報に基づいて、作業位置情報の正否を判定する。
ステップS120からステップS140の手順は、実施の形態1(図6から図8参照)で説明した通りである。 In step S120, the workposition calculation unit 312 calculates work position information based on the sensor data of each time obtained by the sensor 240.
In step S130, the on-sitedata acquisition unit 311 acquires corresponding on-site data from the on-site database 111.
In step S140, the workposition determination unit 313 determines whether the work position information is correct or not based on the standard position information included in the relevant site data.
The procedure of steps S120 to S140 is as described in the first embodiment (see FIGS. 6 to 8).
ステップS130において、現場データ取得部311は、現場データベース111から該当現場データを取得する。
ステップS140において、作業位置判定部313は、該当現場データに含まれる標準位置情報に基づいて、作業位置情報の正否を判定する。
ステップS120からステップS140の手順は、実施の形態1(図6から図8参照)で説明した通りである。 In step S120, the work
In step S130, the on-site
In step S140, the work
The procedure of steps S120 to S140 is as described in the first embodiment (see FIGS. 6 to 8).
ステップS200において、作業評価装置300は、作業時間の正否を判定する。
作業時間は、作業が行われた時間に相当する。 In step S200, thework evaluation apparatus 300 determines whether the work time is correct.
The working time corresponds to the time when the work was performed.
作業時間は、作業が行われた時間に相当する。 In step S200, the
The working time corresponds to the time when the work was performed.
図13に基づいて、作業時間判定(S200)の手順を説明する。
ステップS210において、作業時間算出部314は、作業データに含まれる時刻情報に基づいて作業時間を算出する。 The procedure of work time determination (S200) will be described based on FIG.
In step S210, the worktime calculation unit 314 calculates the work time based on the time information included in the work data.
ステップS210において、作業時間算出部314は、作業データに含まれる時刻情報に基づいて作業時間を算出する。 The procedure of work time determination (S200) will be described based on FIG.
In step S210, the work
例えば、作業時間算出部314は以下のように作業時間を算出する。
複数の作業が一連の作業として行われる。
作業データは作業毎に生成される。各作業データは作業時刻を含む。
作業時間算出部314は、今回の作業データから作業時刻を取得する。取得される作業時刻を今回の作業時刻という。
作業時間算出部314は、前回の作業データから作業時刻を取得する。取得される作業時刻を前回の作業時刻という。
作業時間算出部314は、前回の作業時刻から今回の作業時刻までの時間を算出する。算出される時間が作業時間である。 For example, the workingtime calculation unit 314 calculates the working time as follows.
Multiple tasks are performed as a series of tasks.
Work data is generated for each work. Each work data includes work time.
The worktime calculation unit 314 acquires work time from the current work data. The acquired work time is called this work time.
The worktime calculation unit 314 acquires work time from the previous work data. The acquired work time is referred to as the previous work time.
The worktime calculation unit 314 calculates the time from the previous work time to the current work time. The time calculated is the working time.
複数の作業が一連の作業として行われる。
作業データは作業毎に生成される。各作業データは作業時刻を含む。
作業時間算出部314は、今回の作業データから作業時刻を取得する。取得される作業時刻を今回の作業時刻という。
作業時間算出部314は、前回の作業データから作業時刻を取得する。取得される作業時刻を前回の作業時刻という。
作業時間算出部314は、前回の作業時刻から今回の作業時刻までの時間を算出する。算出される時間が作業時間である。 For example, the working
Multiple tasks are performed as a series of tasks.
Work data is generated for each work. Each work data includes work time.
The work
The work
The work
例えば、作業時間算出部314は以下のように作業時間を算出する。
作業者101は、作業を開始するときに作業手順を確認するために携帯端末200を操作する。そして、表示部261は作業手順を表示する。
作業データは、作業開始時刻と作業終了時刻とを含む。
具体的には、作業開始時刻は作業手順が表示された時刻であり、作業終了時刻は作業結果が受け付けられた時刻である。作業終了時刻は実施の形態1における作業時刻に相当する。
作業時間算出部314は、作業データから作業開始時刻と作業終了時刻とを取得し、作業開始時刻から作業終了時刻までの時間を算出する。算出される時間が作業時間である。 For example, the workingtime calculation unit 314 calculates the working time as follows.
The worker 101 operates theportable terminal 200 to confirm the work procedure when starting the work. Then, the display unit 261 displays the work procedure.
The work data includes a work start time and a work end time.
Specifically, the work start time is the time when the work procedure is displayed, and the work end time is the time when the work result is accepted. The work end time corresponds to the work time in the first embodiment.
The worktime calculation unit 314 acquires the work start time and the work finish time from the work data, and calculates the time from the work start time to the work finish time. The time calculated is the working time.
作業者101は、作業を開始するときに作業手順を確認するために携帯端末200を操作する。そして、表示部261は作業手順を表示する。
作業データは、作業開始時刻と作業終了時刻とを含む。
具体的には、作業開始時刻は作業手順が表示された時刻であり、作業終了時刻は作業結果が受け付けられた時刻である。作業終了時刻は実施の形態1における作業時刻に相当する。
作業時間算出部314は、作業データから作業開始時刻と作業終了時刻とを取得し、作業開始時刻から作業終了時刻までの時間を算出する。算出される時間が作業時間である。 For example, the working
The worker 101 operates the
The work data includes a work start time and a work end time.
Specifically, the work start time is the time when the work procedure is displayed, and the work end time is the time when the work result is accepted. The work end time corresponds to the work time in the first embodiment.
The work
ステップS220において、標準時間算出部315は、該当現場データ(ステップS130を参照)に含まれる現場サイズ値を用いて、標準時間を算出する。
各現場データは現場サイズ値を含む。
現場サイズ値は、作業現場のサイズを示す。例えば、現場サイズ値は、床面積または階床数である。 In step S220, the standardtime calculation unit 315 calculates the standard time using the spot size value included in the relevant spot data (see step S130).
Each site data includes site size values.
The field size value indicates the size of the work site. For example, the site size value is floor area or number of floors.
各現場データは現場サイズ値を含む。
現場サイズ値は、作業現場のサイズを示す。例えば、現場サイズ値は、床面積または階床数である。 In step S220, the standard
Each site data includes site size values.
The field size value indicates the size of the work site. For example, the site size value is floor area or number of floors.
図14に基づいて、標準時間算出処理(S220)の手順を説明する。
ステップS221において、標準時間算出部315は、該当現場データから現場サイズ値を取得する。 The procedure of the standard time calculation process (S220) will be described based on FIG.
In step S221, the standardtime calculation unit 315 acquires a field size value from the corresponding field data.
ステップS221において、標準時間算出部315は、該当現場データから現場サイズ値を取得する。 The procedure of the standard time calculation process (S220) will be described based on FIG.
In step S221, the standard
ステップS222において、標準時間算出部315は、通信部341を介してデータサーバ110と通信を行うことによって、ステップS131(図7参照)で取得された組に対応する時間式を時間式データベース112から取得する。取得される時間式を該当時間式という。
In step S222, the standard time calculation unit 315 communicates with the data server 110 via the communication unit 341 to obtain a time expression corresponding to the set acquired in step S131 (see FIG. 7) from the time expression database 112. get. The acquired time expression is called the corresponding time expression.
ステップS223において、標準時間算出部315は、現場サイズ値を該当時間式の中のサイズ変数に代入する。
In step S223, the standard time calculation unit 315 substitutes the field size value into the size variable in the corresponding time formula.
ステップS224において、標準時間算出部315は、該当時間式を計算する。これにより、標準時間が算出される。
In step S224, the standard time calculation unit 315 calculates the corresponding time formula. Thereby, the standard time is calculated.
図13に戻り、ステップS230を説明する。
ステップS230において、作業時間判定部316は、標準時間に基づいて作業時間の適否を判定する。 Referring back to FIG. 13, step S230 will be described.
In step S230, the workingtime determination unit 316 determines whether the working time is appropriate based on the standard time.
ステップS230において、作業時間判定部316は、標準時間に基づいて作業時間の適否を判定する。 Referring back to FIG. 13, step S230 will be described.
In step S230, the working
図15に基づいて、作業時間判定処理(S230)の手順を説明する。
ステップS231において、作業時間判定部316は、標準時間と作業時間との差を算出する。算出される差を時間誤差という。 The procedure of the working time determination process (S230) will be described based on FIG.
In step S231, the workingtime determination unit 316 calculates the difference between the standard time and the working time. The calculated difference is called a time error.
ステップS231において、作業時間判定部316は、標準時間と作業時間との差を算出する。算出される差を時間誤差という。 The procedure of the working time determination process (S230) will be described based on FIG.
In step S231, the working
ステップS232において、作業時間判定部316は、時間誤差が許容範囲内の値であるか判定する。この許容範囲は、時間誤差用に予め決められた範囲である。
時間誤差が許容範囲内の値である場合、作業時間は適切である。
時間誤差が許容範囲外の値である場合、作業時間は適切でない。 In step S232, the workingtime determination unit 316 determines whether the time error is a value within the allowable range. This tolerance range is a range predetermined for time error.
If the time error is an acceptable value, the working time is appropriate.
If the time error is out of tolerance, the working time is not appropriate.
時間誤差が許容範囲内の値である場合、作業時間は適切である。
時間誤差が許容範囲外の値である場合、作業時間は適切でない。 In step S232, the working
If the time error is an acceptable value, the working time is appropriate.
If the time error is out of tolerance, the working time is not appropriate.
図12に戻り、ステップS160を説明する。
ステップS160において、警告部263は、作業位置情報と作業時間との少なくともいずれかが適切でない場合に警告を発する。 Referring back to FIG. 12, step S160 will be described.
In step S160, thewarning unit 263 issues a warning when at least one of the work position information and the work time is not appropriate.
ステップS160において、警告部263は、作業位置情報と作業時間との少なくともいずれかが適切でない場合に警告を発する。 Referring back to FIG. 12, step S160 will be described.
In step S160, the
図16に基づいて、警告処理(S160)の手順を説明する。
ステップS161において、通信部341は、判定結果を携帯端末200へ送信する。判定結果は、作業位置情報の適否と作業時間の適否とを示す。 The procedure of the warning process (S160) will be described based on FIG.
In step S161, thecommunication unit 341 transmits the determination result to the portable terminal 200. The determination result indicates the propriety of the work position information and the propriety of the work time.
ステップS161において、通信部341は、判定結果を携帯端末200へ送信する。判定結果は、作業位置情報の適否と作業時間の適否とを示す。 The procedure of the warning process (S160) will be described based on FIG.
In step S161, the
ステップS162において、通信部251は、判定結果を携帯端末200から受信する。
In step S162, the communication unit 251 receives the determination result from the portable terminal 200.
ステップS163において、警告判定部213は、判定結果を参照することによって、作業位置情報の適否を判定する。
作業位置情報が適切である場合、処理はステップS165に進む。
作業位置情報が適切でない場合、処理はステップS164に進む。 In step S163, thewarning determination unit 213 determines the suitability of the work position information by referring to the determination result.
If the work position information is appropriate, the process proceeds to step S165.
If the work position information is not appropriate, the process proceeds to step S164.
作業位置情報が適切である場合、処理はステップS165に進む。
作業位置情報が適切でない場合、処理はステップS164に進む。 In step S163, the
If the work position information is appropriate, the process proceeds to step S165.
If the work position information is not appropriate, the process proceeds to step S164.
ステップS164において、警告部263は警告を発する。
具体的には、警告部263は、作業位置情報用の警告メッセージを表示する。 In step S164, thewarning unit 263 issues a warning.
Specifically, thewarning unit 263 displays a warning message for work position information.
具体的には、警告部263は、作業位置情報用の警告メッセージを表示する。 In step S164, the
Specifically, the
ステップS165において、警告判定部213は、判定結果を参照することによって、作業時間の適否を判定する。
作業時間が適切である場合、処理は終了する。
作業時間が適切でない場合、処理はステップS166に進む。 In step S165, thewarning determination unit 213 determines whether the working time is appropriate by referring to the determination result.
If the working time is appropriate, the process ends.
If the working time is not appropriate, the process proceeds to step S166.
作業時間が適切である場合、処理は終了する。
作業時間が適切でない場合、処理はステップS166に進む。 In step S165, the
If the working time is appropriate, the process ends.
If the working time is not appropriate, the process proceeds to step S166.
ステップS166において、警告部263は警告を発する。
具体的には、警告部263は、作業時間用の警告メッセージを表示する。 In step S166, thewarning unit 263 issues a warning.
Specifically, thewarning unit 263 displays a warning message for working time.
具体的には、警告部263は、作業時間用の警告メッセージを表示する。 In step S166, the
Specifically, the
***実施の形態2の効果***
作業評価システム100では、携帯端末200への作業結果の入力をきっかけにして作業データが生成され、作業データに基づいて作業時間が算出される。そのため、作業評価システム100では、作業対象を特定する情報が登録されたバーコードまたはICタグ等を各作業対象に取り付けることなく、作業時間の適否を判定することができる。 *** Effect of Embodiment 2 ***
In the work evaluation system 100, work data is generated triggered by the input of the work result to theportable terminal 200, and the work time is calculated based on the work data. Therefore, in the work evaluation system 100, it is possible to determine whether the work time is appropriate without attaching a bar code, an IC tag, or the like in which information specifying the work target is registered to each work target.
作業評価システム100では、携帯端末200への作業結果の入力をきっかけにして作業データが生成され、作業データに基づいて作業時間が算出される。そのため、作業評価システム100では、作業対象を特定する情報が登録されたバーコードまたはICタグ等を各作業対象に取り付けることなく、作業時間の適否を判定することができる。 *** Effect of Embodiment 2 ***
In the work evaluation system 100, work data is generated triggered by the input of the work result to the
***他の構成***
作業位置情報用の警告メッセージと作業時間用の警告メッセージとは、同じ警告メッセージであってもよいし、異なる警告メッセージであってもよい。 *** Other configuration ***
The warning message for the work position information and the warning message for the working time may be the same warning message or different warning messages.
作業位置情報用の警告メッセージと作業時間用の警告メッセージとは、同じ警告メッセージであってもよいし、異なる警告メッセージであってもよい。 *** Other configuration ***
The warning message for the work position information and the warning message for the working time may be the same warning message or different warning messages.
警告部263は、作業位置情報と作業時間との両方が適切でない場合に警告を発してもよい。
The warning unit 263 may issue a warning when both work position information and work time are not appropriate.
作業評価装置300は、作業位置情報の適否を判定しなくてもよい。つまり、作業評価装置300は、作業位置算出部312と作業位置判定部313とを備えなくてもよい。
The work evaluation apparatus 300 may not determine whether the work position information is appropriate. That is, the work evaluation apparatus 300 may not include the work position calculation unit 312 and the work position determination unit 313.
作業評価装置300は、複数の装置で構成されてもよい。
The work evaluation device 300 may be configured by a plurality of devices.
現場データ取得部311と作業位置算出部312と作業位置判定部313といった作業評価装置300の要素は、携帯端末200に備えてもよい。
作業時間算出部314と標準時間算出部315と作業時間判定部316といった作業評価装置300の要素は、携帯端末200に備えてもよい。
現場データベース111は、作業評価装置300または携帯端末200に記憶されてもよい。 Elements of thework evaluation apparatus 300 such as the site data acquisition unit 311, the work position calculation unit 312, and the work position determination unit 313 may be included in the mobile terminal 200.
Elements of thework evaluation device 300 such as the work time calculation unit 314, the standard time calculation unit 315, and the work time determination unit 316 may be included in the mobile terminal 200.
Thesite database 111 may be stored in the work evaluation device 300 or the mobile terminal 200.
作業時間算出部314と標準時間算出部315と作業時間判定部316といった作業評価装置300の要素は、携帯端末200に備えてもよい。
現場データベース111は、作業評価装置300または携帯端末200に記憶されてもよい。 Elements of the
Elements of the
The
作業評価装置300とデータサーバ110とは、インターネット以外のネットワーク109で互いに接続されてもよい。例えば、作業評価装置300とデータサーバ110とは、イントラネット、LANまたはケーブルで互いに接続されてもよい。
The work evaluation apparatus 300 and the data server 110 may be connected to each other by a network 109 other than the Internet. For example, the work evaluation apparatus 300 and the data server 110 may be connected to each other by an intranet, a LAN or a cable.
作業位置算出部312は、各時刻のセンサデータを用いて作業時刻における携帯端末200の位置情報を算出し、作業時刻における携帯端末200の位置情報を現場範囲内の位置を示す位置情報に補正してもよい。補正後の位置情報は作業位置情報として使用される。
現場範囲は、作業現場の範囲である。具体的には、現場範囲は、建物内の空間または屋上より低い場所などである。
例えば、現場データが現場マップを含み、現場マップが現場範囲を示す。そして、作業位置算出部312は、現場マップが示す現場範囲に基づいて作業時刻における携帯端末200の位置情報を補正する。
さらに、作業位置算出部312は、初期位置情報および各時刻における携帯端末200の位置情報を補正してもよい。 The workposition calculation unit 312 calculates the position information of the portable terminal 200 at the work time using the sensor data of each time, and corrects the position information of the portable terminal 200 at the work time to position information indicating the position within the site range. May be The corrected position information is used as work position information.
The site range is the scope of the work site. Specifically, the site range is a space in a building or a place lower than the roof.
For example, site data includes site maps, and site maps indicate site coverage. Then, the workposition calculation unit 312 corrects the position information of the portable terminal 200 at the work time based on the site range indicated by the site map.
Furthermore, the workposition calculation unit 312 may correct the initial position information and the position information of the portable terminal 200 at each time.
現場範囲は、作業現場の範囲である。具体的には、現場範囲は、建物内の空間または屋上より低い場所などである。
例えば、現場データが現場マップを含み、現場マップが現場範囲を示す。そして、作業位置算出部312は、現場マップが示す現場範囲に基づいて作業時刻における携帯端末200の位置情報を補正する。
さらに、作業位置算出部312は、初期位置情報および各時刻における携帯端末200の位置情報を補正してもよい。 The work
The site range is the scope of the work site. Specifically, the site range is a space in a building or a place lower than the roof.
For example, site data includes site maps, and site maps indicate site coverage. Then, the work
Furthermore, the work
作業位置算出部312は、作業時刻以外の時刻における携帯端末200の位置情報を算出せずに、作業位置情報だけを算出してもよい。
例えば、作業位置算出部312は、作業時刻における気圧センサのセンサデータを用いて、作業時刻における携帯端末200の高さ情報を算出してもよい。 The workposition calculation unit 312 may calculate only work position information without calculating position information of the mobile terminal 200 at times other than the work time.
For example, the workposition calculation unit 312 may calculate the height information of the portable terminal 200 at the work time using the sensor data of the air pressure sensor at the work time.
例えば、作業位置算出部312は、作業時刻における気圧センサのセンサデータを用いて、作業時刻における携帯端末200の高さ情報を算出してもよい。 The work
For example, the work
センサ240は、携帯端末200の外部に設けてもよい。
例えば、作業者101は、携帯端末200と通信するセンサ端末を携帯端末200と共に所持する。そして、センサ端末がセンサ240を備える。 Thesensor 240 may be provided outside the mobile terminal 200.
For example, the worker 101 holds the sensor terminal communicating with themobile terminal 200 together with the mobile terminal 200. Then, the sensor terminal includes the sensor 240.
例えば、作業者101は、携帯端末200と通信するセンサ端末を携帯端末200と共に所持する。そして、センサ端末がセンサ240を備える。 The
For example, the worker 101 holds the sensor terminal communicating with the
位置情報は、1次元または2次元の情報であってもよい。
例えば、エレベーターまたは送電鉄塔での作業では高さ情報が重要である。また、レール上での作業では距離情報が重要である。高さ情報または距離情報が重要である場合、位置情報は、高さ情報または位置情報のような1次元の情報であればよい。高さ情報は、気圧センサのセンサデータを用いて算出される。
例えば、1フロアでの作業では高さ情報は重要でない。高さ情報が重要でない場合、位置情報は2次元の情報であればよい。 The position information may be one-dimensional or two-dimensional information.
For example, height information is important when working with elevators or transmission towers. In addition, distance information is important in work on the rail. When height information or distance information is important, the position information may be one-dimensional information such as height information or position information. The height information is calculated using sensor data of an air pressure sensor.
For example, height information is not important when working on one floor. If the height information is not important, the position information may be two-dimensional information.
例えば、エレベーターまたは送電鉄塔での作業では高さ情報が重要である。また、レール上での作業では距離情報が重要である。高さ情報または距離情報が重要である場合、位置情報は、高さ情報または位置情報のような1次元の情報であればよい。高さ情報は、気圧センサのセンサデータを用いて算出される。
例えば、1フロアでの作業では高さ情報は重要でない。高さ情報が重要でない場合、位置情報は2次元の情報であればよい。 The position information may be one-dimensional or two-dimensional information.
For example, height information is important when working with elevators or transmission towers. In addition, distance information is important in work on the rail. When height information or distance information is important, the position information may be one-dimensional information such as height information or position information. The height information is calculated using sensor data of an air pressure sensor.
For example, height information is not important when working on one floor. If the height information is not important, the position information may be two-dimensional information.
警告メッセージは、携帯端末200以外のディスプレイ装置に表示されてもよい。その場合、通信装置250が警告部263として機能し、警告部263が携帯端末200以外のディスプレイ装置に警告メッセージを送信する。そして、携帯端末200以外のディスプレイ装置が警告メッセージを表示する。具体的には、作業者101が携帯端末200以外のディスプレイ装置を身に付け、そのディスプレイ装置が警告メッセージを表示する。携帯端末200以外のディスプレイ装置の一例は、作業者101が装着するヘッドマウントディスプレイである。
The warning message may be displayed on a display device other than the mobile terminal 200. In that case, the communication device 250 functions as the warning unit 263, and the warning unit 263 transmits a warning message to display devices other than the portable terminal 200. Then, the display devices other than the mobile terminal 200 display a warning message. Specifically, the worker 101 wears a display device other than the portable terminal 200, and the display device displays a warning message. An example of a display device other than the mobile terminal 200 is a head mounted display worn by the worker 101.
警告部263は、ディスプレイによる表示以外の方法で警告を発してもよい。
例えば、警告部263は、スピーカーによる音声出力、バイブレーターによる振動または通信装置250によるメール送信によって警告を発する。 Thewarning unit 263 may issue a warning by a method other than display by a display.
For example, thewarning unit 263 issues a warning by voice output by a speaker, vibration by a vibrator, or e-mail transmission by the communication device 250.
例えば、警告部263は、スピーカーによる音声出力、バイブレーターによる振動または通信装置250によるメール送信によって警告を発する。 The
For example, the
作業者101は人間ではなくロボットであってもよい。
つまり、作業評価システム100が作業ロボットを備え、作業ロボットが携帯端末200を備えてもよい。例えば、作業ロボットは、携帯端末200を所持または内蔵する。 The worker 101 may not be a human but a robot.
That is, the work evaluation system 100 may include the work robot, and the work robot may include theportable terminal 200. For example, the work robot holds or incorporates the portable terminal 200.
つまり、作業評価システム100が作業ロボットを備え、作業ロボットが携帯端末200を備えてもよい。例えば、作業ロボットは、携帯端末200を所持または内蔵する。 The worker 101 may not be a human but a robot.
That is, the work evaluation system 100 may include the work robot, and the work robot may include the
実施の形態3.
作業位置情報が適切でない場合に作業結果を受け付けない形態について、主に実施の形態1と異なる点を図17から図19に基づいて説明する。 Third Embodiment
A mode in which the work result is not accepted when the work position information is not appropriate will be mainly described on the points different from the first embodiment based on FIG. 17 to FIG.
作業位置情報が適切でない場合に作業結果を受け付けない形態について、主に実施の形態1と異なる点を図17から図19に基づいて説明する。 Third Embodiment
A mode in which the work result is not accepted when the work position information is not appropriate will be mainly described on the points different from the first embodiment based on FIG. 17 to FIG.
***構成の説明***
作業評価システム100の構成は、実施の形態1における構成(図1から図3を参照)と同じである。 *** Description of the configuration ***
The configuration of the task evaluation system 100 is the same as the configuration in the first embodiment (see FIGS. 1 to 3).
作業評価システム100の構成は、実施の形態1における構成(図1から図3を参照)と同じである。 *** Description of the configuration ***
The configuration of the task evaluation system 100 is the same as the configuration in the first embodiment (see FIGS. 1 to 3).
***動作の説明***
図17に基づいて、作業評価方法を説明する。
ステップS310において、作業データ生成部211は作業データを生成する。 *** Description of operation ***
The work evaluation method will be described based on FIG.
In step S310, the workdata generation unit 211 generates work data.
図17に基づいて、作業評価方法を説明する。
ステップS310において、作業データ生成部211は作業データを生成する。 *** Description of operation ***
The work evaluation method will be described based on FIG.
In step S310, the work
図18に基づいて、作業データ取得処理(S310)の手順を説明する。
ステップS311において、表示部261は、結果入力画面を表示する。 The procedure of the work data acquisition process (S310) will be described based on FIG.
In step S311, thedisplay unit 261 displays a result input screen.
ステップS311において、表示部261は、結果入力画面を表示する。 The procedure of the work data acquisition process (S310) will be described based on FIG.
In step S311, the
ステップS312において、作業者101は、携帯端末200の入力装置を操作することによって、結果入力欄を選択して結果入力欄に作業結果を入力する。
受付部262は、結果入力欄の選択を受け付ける。なお、受付部262は、この時点では作業結果を受け付けない。 In step S312, the operator 101 operates the input device of theportable terminal 200 to select the result input field and input the work result in the result input field.
The receivingunit 262 receives the selection of the result input field. The accepting unit 262 does not accept the work result at this time.
受付部262は、結果入力欄の選択を受け付ける。なお、受付部262は、この時点では作業結果を受け付けない。 In step S312, the operator 101 operates the input device of the
The receiving
ステップS313において、作業データ生成部211は作業データを生成する。そして、記憶部221は作業データを記憶する。
作業データは、選択された結果入力欄に対応付けられた現場識別子と、選択された結果入力欄に対応付けられた作業結果とを含む。
さらに、作業データは作業時刻を含む。例えば、作業時刻は、結果入力欄が選択された時刻である。 In step S313, the workdata generation unit 211 generates work data. Then, the storage unit 221 stores work data.
The work data includes the work site identifier associated with the selected result input field and the work result associated with the selected result input field.
Furthermore, work data includes work time. For example, the work time is the time when the result input field is selected.
作業データは、選択された結果入力欄に対応付けられた現場識別子と、選択された結果入力欄に対応付けられた作業結果とを含む。
さらに、作業データは作業時刻を含む。例えば、作業時刻は、結果入力欄が選択された時刻である。 In step S313, the work
The work data includes the work site identifier associated with the selected result input field and the work result associated with the selected result input field.
Furthermore, work data includes work time. For example, the work time is the time when the result input field is selected.
ステップS314において、通信部251は、作業データを作業評価装置300へ送信する。
In step S314, the communication unit 251 transmits work data to the work evaluation apparatus 300.
ステップS315において、通信部341は、作業データを携帯端末200から受信する。そして、記憶部321は作業データを記憶する。
In step S315, the communication unit 341 receives work data from the portable terminal 200. Then, the storage unit 321 stores work data.
図17に戻り、ステップS320を説明する。
ステップS320において、作業位置算出部312は、センサ240によって得られる各時刻のセンサデータに基づいて、作業位置情報を算出する。
ステップS320における処理は、実施の形態1のステップS120における処理と同じである。 Referring back to FIG. 17, step S320 will be described.
In step S320, the workposition calculation unit 312 calculates work position information based on the sensor data of each time obtained by the sensor 240.
The process in step S320 is the same as the process in step S120 of the first embodiment.
ステップS320において、作業位置算出部312は、センサ240によって得られる各時刻のセンサデータに基づいて、作業位置情報を算出する。
ステップS320における処理は、実施の形態1のステップS120における処理と同じである。 Referring back to FIG. 17, step S320 will be described.
In step S320, the work
The process in step S320 is the same as the process in step S120 of the first embodiment.
ステップS330において、現場データ取得部311は、現場データベース111から該当現場データを取得する。
ステップS330における処理は、実施の形態1のステップS130における処理と同じである。 In step S330, the on-sitedata acquisition unit 311 acquires corresponding on-site data from the on-site database 111.
The process in step S330 is the same as the process in step S130 of the first embodiment.
ステップS330における処理は、実施の形態1のステップS130における処理と同じである。 In step S330, the on-site
The process in step S330 is the same as the process in step S130 of the first embodiment.
ステップS350において、警告部263は、作業位置情報が適切でない場合に警告を発する。
In step S350, the warning unit 263 issues a warning when the work position information is not appropriate.
図19に基づいて、警告処理(S350)の手順を説明する。
ステップS351において、通信部341は、判定結果を携帯端末200へ送信する。 The procedure of the warning process (S350) will be described based on FIG.
In step S 351, thecommunication unit 341 transmits the determination result to the portable terminal 200.
ステップS351において、通信部341は、判定結果を携帯端末200へ送信する。 The procedure of the warning process (S350) will be described based on FIG.
In step S 351, the
ステップS352において、通信部251は、判定結果を携帯端末200から受信する。
In step S352, the communication unit 251 receives the determination result from the portable terminal 200.
ステップS353において、警告判定部213は、判定結果を参照することによって、作業位置情報の適否を判定する。
作業位置情報が適切である場合、処理はステップS354に進む。
作業位置情報が適切でない場合、処理はステップS355に進む。 In step S353, thewarning determination unit 213 determines the suitability of the work position information by referring to the determination result.
If the work position information is appropriate, the process proceeds to step S354.
If the work position information is not appropriate, the process proceeds to step S355.
作業位置情報が適切である場合、処理はステップS354に進む。
作業位置情報が適切でない場合、処理はステップS355に進む。 In step S353, the
If the work position information is appropriate, the process proceeds to step S354.
If the work position information is not appropriate, the process proceeds to step S355.
ステップS354において、受付部262は、ステップS312で入力された作業結果を受け付ける。
そして、警告判定部213は、ステップS113で記憶された作業データに作業結果を加える。 In step S354, the receivingunit 262 receives the work result input in step S312.
Then, thewarning determination unit 213 adds the work result to the work data stored in step S113.
そして、警告判定部213は、ステップS113で記憶された作業データに作業結果を加える。 In step S354, the receiving
Then, the
ステップS355において、警告部263は警告を発する。
この場合、受付部262は、ステップS312で入力された作業結果を受け付けない。そのため、警告判定部213は、ステップS113で記憶された作業データに作業結果を加えない。 In step S355, thewarning unit 263 issues a warning.
In this case, the receivingunit 262 does not receive the work result input in step S312. Therefore, the warning determination unit 213 does not add the work result to the work data stored in step S113.
この場合、受付部262は、ステップS312で入力された作業結果を受け付けない。そのため、警告判定部213は、ステップS113で記憶された作業データに作業結果を加えない。 In step S355, the
In this case, the receiving
***実施の形態3の効果***
作業評価システム100では、携帯端末200への作業結果の入力をきっかけにして作業データが生成され、センサ240を利用して作業位置情報が算出される。そのため、作業評価システム100では、作業対象を特定する情報が登録されたバーコードまたはICタグ等を各作業対象に取り付けることなく、作業位置情報の適否を判定することができる。さらに、作業位置情報が適切でない場合には作業結果を受け付けないようにすることができる。 *** Effect of Embodiment 3 ***
In the work evaluation system 100, work data is generated triggered by an input of a work result to theportable terminal 200, and work position information is calculated using the sensor 240. Therefore, the work evaluation system 100 can determine the propriety of the work position information without attaching a bar code, an IC tag or the like in which the information specifying the work target is registered to each work target. Furthermore, when the work position information is not appropriate, it is possible not to accept the work result.
作業評価システム100では、携帯端末200への作業結果の入力をきっかけにして作業データが生成され、センサ240を利用して作業位置情報が算出される。そのため、作業評価システム100では、作業対象を特定する情報が登録されたバーコードまたはICタグ等を各作業対象に取り付けることなく、作業位置情報の適否を判定することができる。さらに、作業位置情報が適切でない場合には作業結果を受け付けないようにすることができる。 *** Effect of Embodiment 3 ***
In the work evaluation system 100, work data is generated triggered by an input of a work result to the
***他の構成***
作業評価装置300は、実施の形態2と同じく、作業時間の適否を判定してもよい。つまり、作業評価装置300は、作業時間算出部314と標準時間算出部315と作業時間判定部316とを備えてもよい。
受付部262は、警告部263が警告を発しない場合には作業結果を受け付け、警告部263が警告を発する場合には作業結果を受け付けない。
つまり、受付部262は、作業位置情報と作業時間との両方が適切である場合には作業結果を受け付け、作業位置情報と作業時間との少なくともいずれかが適切でない場合には作業結果を受け付けない。
または、受付部262は、作業位置情報と作業時間との少なくともいずれかが適切である場合には作業結果を受け付け、作業位置情報と作業時間との両方が適切でない場合には作業結果を受け付けない。 *** Other configuration ***
As in the second embodiment, thework evaluation apparatus 300 may determine whether the work time is appropriate. That is, the work evaluation apparatus 300 may include the work time calculation unit 314, the standard time calculation unit 315, and the work time determination unit 316.
The receivingunit 262 receives the work result when the warning unit 263 does not issue a warning, and does not receive the work result when the warning unit 263 issues a warning.
That is, thereception unit 262 receives the work result when both the work position information and the work time are appropriate, and does not receive the work result when at least one of the work position information and the work time is not appropriate. .
Alternatively, the receivingunit 262 receives the work result when at least one of the work position information and the work time is appropriate, and does not receive the work result when both the work position information and the work time are not appropriate. .
作業評価装置300は、実施の形態2と同じく、作業時間の適否を判定してもよい。つまり、作業評価装置300は、作業時間算出部314と標準時間算出部315と作業時間判定部316とを備えてもよい。
受付部262は、警告部263が警告を発しない場合には作業結果を受け付け、警告部263が警告を発する場合には作業結果を受け付けない。
つまり、受付部262は、作業位置情報と作業時間との両方が適切である場合には作業結果を受け付け、作業位置情報と作業時間との少なくともいずれかが適切でない場合には作業結果を受け付けない。
または、受付部262は、作業位置情報と作業時間との少なくともいずれかが適切である場合には作業結果を受け付け、作業位置情報と作業時間との両方が適切でない場合には作業結果を受け付けない。 *** Other configuration ***
As in the second embodiment, the
The receiving
That is, the
Alternatively, the receiving
作業評価装置300は、複数の装置で構成されてもよい。
The work evaluation device 300 may be configured by a plurality of devices.
現場データ取得部311と作業位置算出部312と作業位置判定部313といった作業評価装置300の要素は、携帯端末200に備えてもよい。
作業時間算出部314と標準時間算出部315と作業時間判定部316といった作業評価装置300の要素は、携帯端末200に備えてもよい。
現場データベース111は、作業評価装置300または携帯端末200に記憶されてもよい。 Elements of thework evaluation apparatus 300 such as the site data acquisition unit 311, the work position calculation unit 312, and the work position determination unit 313 may be included in the mobile terminal 200.
Elements of thework evaluation device 300 such as the work time calculation unit 314, the standard time calculation unit 315, and the work time determination unit 316 may be included in the mobile terminal 200.
Thesite database 111 may be stored in the work evaluation device 300 or the mobile terminal 200.
作業時間算出部314と標準時間算出部315と作業時間判定部316といった作業評価装置300の要素は、携帯端末200に備えてもよい。
現場データベース111は、作業評価装置300または携帯端末200に記憶されてもよい。 Elements of the
Elements of the
The
作業評価装置300とデータサーバ110とは、インターネット以外のネットワーク109で互いに接続されてもよい。例えば、作業評価装置300とデータサーバ110とは、イントラネット、LANまたはケーブルで互いに接続されてもよい。
The work evaluation apparatus 300 and the data server 110 may be connected to each other by a network 109 other than the Internet. For example, the work evaluation apparatus 300 and the data server 110 may be connected to each other by an intranet, a LAN or a cable.
作業位置算出部312は、各時刻のセンサデータを用いて作業時刻における携帯端末200の位置情報を算出し、作業時刻における携帯端末200の位置情報を現場範囲内の位置を示す位置情報に補正してもよい。補正後の位置情報は作業位置情報として使用される。
現場範囲は、作業現場の範囲である。具体的には、現場範囲は、建物内の空間または屋上より低い場所などである。
例えば、現場データが現場マップを含み、現場マップが現場範囲を示す。そして、作業位置算出部312は、現場マップが示す現場範囲に基づいて作業時刻における携帯端末200の位置情報を補正する。
さらに、作業位置算出部312は、初期位置情報および各時刻における携帯端末200の位置情報を補正してもよい。 The workposition calculation unit 312 calculates the position information of the portable terminal 200 at the work time using the sensor data of each time, and corrects the position information of the portable terminal 200 at the work time to position information indicating the position within the site range. May be The corrected position information is used as work position information.
The site range is the scope of the work site. Specifically, the site range is a space in a building or a place lower than the roof.
For example, site data includes site maps, and site maps indicate site coverage. Then, the workposition calculation unit 312 corrects the position information of the portable terminal 200 at the work time based on the site range indicated by the site map.
Furthermore, the workposition calculation unit 312 may correct the initial position information and the position information of the portable terminal 200 at each time.
現場範囲は、作業現場の範囲である。具体的には、現場範囲は、建物内の空間または屋上より低い場所などである。
例えば、現場データが現場マップを含み、現場マップが現場範囲を示す。そして、作業位置算出部312は、現場マップが示す現場範囲に基づいて作業時刻における携帯端末200の位置情報を補正する。
さらに、作業位置算出部312は、初期位置情報および各時刻における携帯端末200の位置情報を補正してもよい。 The work
The site range is the scope of the work site. Specifically, the site range is a space in a building or a place lower than the roof.
For example, site data includes site maps, and site maps indicate site coverage. Then, the work
Furthermore, the work
作業位置算出部312は、作業時刻以外の時刻における携帯端末200の位置情報を算出せずに、作業位置情報だけを算出してもよい。
例えば、作業位置算出部312は、作業時刻における気圧センサのセンサデータを用いて、作業時刻における携帯端末200の高さ情報を算出してもよい。 The workposition calculation unit 312 may calculate only work position information without calculating position information of the mobile terminal 200 at times other than the work time.
For example, the workposition calculation unit 312 may calculate the height information of the portable terminal 200 at the work time using the sensor data of the air pressure sensor at the work time.
例えば、作業位置算出部312は、作業時刻における気圧センサのセンサデータを用いて、作業時刻における携帯端末200の高さ情報を算出してもよい。 The work
For example, the work
センサ240は、携帯端末200の外部に設けてもよい。
例えば、作業者101は、携帯端末200と通信するセンサ端末を携帯端末200と共に所持する。そして、センサ端末がセンサ240を備える。 Thesensor 240 may be provided outside the mobile terminal 200.
For example, the worker 101 holds the sensor terminal communicating with themobile terminal 200 together with the mobile terminal 200. Then, the sensor terminal includes the sensor 240.
例えば、作業者101は、携帯端末200と通信するセンサ端末を携帯端末200と共に所持する。そして、センサ端末がセンサ240を備える。 The
For example, the worker 101 holds the sensor terminal communicating with the
位置情報は、1次元または2次元の情報であってもよい。
例えば、エレベーターまたは送電鉄塔での作業では高さ情報が重要である。また、レール上での作業では距離情報が重要である。高さ情報または距離情報が重要である場合、位置情報は、高さ情報または位置情報のような1次元の情報であればよい。高さ情報は、気圧センサのセンサデータを用いて算出される。
例えば、1フロアでの作業では高さ情報は重要でない。高さ情報が重要でない場合、位置情報は2次元の情報であればよい。 The position information may be one-dimensional or two-dimensional information.
For example, height information is important when working with elevators or transmission towers. In addition, distance information is important in work on the rail. When height information or distance information is important, the position information may be one-dimensional information such as height information or position information. The height information is calculated using sensor data of an air pressure sensor.
For example, height information is not important when working on one floor. If the height information is not important, the position information may be two-dimensional information.
例えば、エレベーターまたは送電鉄塔での作業では高さ情報が重要である。また、レール上での作業では距離情報が重要である。高さ情報または距離情報が重要である場合、位置情報は、高さ情報または位置情報のような1次元の情報であればよい。高さ情報は、気圧センサのセンサデータを用いて算出される。
例えば、1フロアでの作業では高さ情報は重要でない。高さ情報が重要でない場合、位置情報は2次元の情報であればよい。 The position information may be one-dimensional or two-dimensional information.
For example, height information is important when working with elevators or transmission towers. In addition, distance information is important in work on the rail. When height information or distance information is important, the position information may be one-dimensional information such as height information or position information. The height information is calculated using sensor data of an air pressure sensor.
For example, height information is not important when working on one floor. If the height information is not important, the position information may be two-dimensional information.
警告メッセージは、携帯端末200以外のディスプレイ装置に表示されてもよい。その場合、通信装置250が警告部263として機能し、警告部263が携帯端末200以外のディスプレイ装置に警告メッセージを送信する。そして、携帯端末200以外のディスプレイ装置が警告メッセージを表示する。具体的には、作業者101が携帯端末200以外のディスプレイ装置を身に付け、そのディスプレイ装置が警告メッセージを表示する。携帯端末200以外のディスプレイ装置の一例は、作業者101が装着するヘッドマウントディスプレイである。
The warning message may be displayed on a display device other than the mobile terminal 200. In that case, the communication device 250 functions as the warning unit 263, and the warning unit 263 transmits a warning message to display devices other than the portable terminal 200. Then, the display devices other than the mobile terminal 200 display a warning message. Specifically, the worker 101 wears a display device other than the portable terminal 200, and the display device displays a warning message. An example of a display device other than the mobile terminal 200 is a head mounted display worn by the worker 101.
警告部263は、ディスプレイによる表示以外の方法で警告を発してもよい。
例えば、警告部263は、スピーカーによる音声出力、バイブレーターによる振動または通信装置250によるメール送信によって警告を発する。 Thewarning unit 263 may issue a warning by a method other than display by a display.
For example, thewarning unit 263 issues a warning by voice output by a speaker, vibration by a vibrator, or e-mail transmission by the communication device 250.
例えば、警告部263は、スピーカーによる音声出力、バイブレーターによる振動または通信装置250によるメール送信によって警告を発する。 The
For example, the
作業者101は人間ではなくロボットであってもよい。
つまり、作業評価システム100が作業ロボットを備え、作業ロボットが携帯端末200を備えてもよい。例えば、作業ロボットは、携帯端末200を所持または内蔵する。 The worker 101 may not be a human but a robot.
That is, the work evaluation system 100 may include the work robot, and the work robot may include theportable terminal 200. For example, the work robot holds or incorporates the portable terminal 200.
つまり、作業評価システム100が作業ロボットを備え、作業ロボットが携帯端末200を備えてもよい。例えば、作業ロボットは、携帯端末200を所持または内蔵する。 The worker 101 may not be a human but a robot.
That is, the work evaluation system 100 may include the work robot, and the work robot may include the
実施の形態4.
判定結果を管理装置に通知する形態について、主に実施の形態1と異なる点を図20から図24に基づいて説明する。 Fourth Embodiment
A mode in which the determination result is notified to the management apparatus will be mainly described on the points different from the first embodiment based on FIG. 20 to FIG.
判定結果を管理装置に通知する形態について、主に実施の形態1と異なる点を図20から図24に基づいて説明する。 Fourth Embodiment
A mode in which the determination result is notified to the management apparatus will be mainly described on the points different from the first embodiment based on FIG. 20 to FIG.
***構成の説明***
図20に基づいて、作業評価システム100の構成を説明する。
作業評価システム100は、管理装置400を備える。
管理装置400は、携帯端末200、作業評価装置300およびデータサーバ110以外の装置である。
具体的には、管理装置400は、管理者端末、作業員編成装置または作業履歴管理装置である。
管理者端末は、管理者が使用する端末である。
作業員編成装置は、作業員編成システムで使用される装置である。
作業員編成システムは、各作業に作業員の割り当てるためのシステムである。
作業履歴管理装置は、作業履歴管理システムで使用される装置である。
作業履歴管理システムは、各作業現場の作業履歴を管理するためのシステムである。 *** Description of the configuration ***
The configuration of the work evaluation system 100 will be described based on FIG.
The work evaluation system 100 includes amanagement device 400.
Themanagement device 400 is a device other than the mobile terminal 200, the work evaluation device 300, and the data server 110.
Specifically, themanagement device 400 is a manager terminal, a worker organization device, or a work history management device.
The administrator terminal is a terminal used by the administrator.
The worker organization device is a device used in a worker organization system.
The worker scheduling system is a system for assigning workers to each work.
The work history management device is a device used in a work history management system.
The work history management system is a system for managing the work history of each work site.
図20に基づいて、作業評価システム100の構成を説明する。
作業評価システム100は、管理装置400を備える。
管理装置400は、携帯端末200、作業評価装置300およびデータサーバ110以外の装置である。
具体的には、管理装置400は、管理者端末、作業員編成装置または作業履歴管理装置である。
管理者端末は、管理者が使用する端末である。
作業員編成装置は、作業員編成システムで使用される装置である。
作業員編成システムは、各作業に作業員の割り当てるためのシステムである。
作業履歴管理装置は、作業履歴管理システムで使用される装置である。
作業履歴管理システムは、各作業現場の作業履歴を管理するためのシステムである。 *** Description of the configuration ***
The configuration of the work evaluation system 100 will be described based on FIG.
The work evaluation system 100 includes a
The
Specifically, the
The administrator terminal is a terminal used by the administrator.
The worker organization device is a device used in a worker organization system.
The worker scheduling system is a system for assigning workers to each work.
The work history management device is a device used in a work history management system.
The work history management system is a system for managing the work history of each work site.
図21に基づいて、管理装置400の構成を説明する。
管理装置400は、プロセッサ410とメモリ420と補助記憶装置430と通信装置440と入出力装置450といったハードウェアを備えるコンピュータである。これらのハードウェアは、信号線を介して互いに接続されている。 The configuration of themanagement device 400 will be described based on FIG.
Themanagement device 400 is a computer including hardware such as a processor 410, a memory 420, an auxiliary storage device 430, a communication device 440, and an input / output device 450. These pieces of hardware are connected to each other via signal lines.
管理装置400は、プロセッサ410とメモリ420と補助記憶装置430と通信装置440と入出力装置450といったハードウェアを備えるコンピュータである。これらのハードウェアは、信号線を介して互いに接続されている。 The configuration of the
The
プロセッサ410は、演算処理を行うICであり、他のハードウェアを制御する。例えば、プロセッサ410は、CPU、DSP、またはGPUである。
メモリ420は揮発性の記憶装置である。メモリ420は、主記憶装置またはメインメモリとも呼ばれる。例えば、メモリ420はRAMである。メモリ420に記憶されたデータは必要に応じて補助記憶装置430に保存される。
補助記憶装置430は不揮発性の記憶装置である。例えば、補助記憶装置430は、ROM、HDD、またはフラッシュメモリである。補助記憶装置430に記憶されたデータは必要に応じてメモリ420にロードされる。 Theprocessor 410 is an IC that performs arithmetic processing and controls other hardware. For example, processor 410 is a CPU, a DSP, or a GPU.
Thememory 420 is a volatile storage device. Memory 420 is also referred to as main storage or main memory. For example, the memory 420 is a RAM. The data stored in the memory 420 is stored in the auxiliary storage device 430 as needed.
Theauxiliary storage device 430 is a non-volatile storage device. For example, the auxiliary storage device 430 is a ROM, an HDD, or a flash memory. The data stored in the auxiliary storage device 430 is loaded into the memory 420 as needed.
メモリ420は揮発性の記憶装置である。メモリ420は、主記憶装置またはメインメモリとも呼ばれる。例えば、メモリ420はRAMである。メモリ420に記憶されたデータは必要に応じて補助記憶装置430に保存される。
補助記憶装置430は不揮発性の記憶装置である。例えば、補助記憶装置430は、ROM、HDD、またはフラッシュメモリである。補助記憶装置430に記憶されたデータは必要に応じてメモリ420にロードされる。 The
The
The
通信装置440は通信を行う装置、すなわち、レシーバ及びトランスミッタである。例えば、通信装置440は通信チップまたはNICである。
入出力装置450は入力装置および出力装置である。例えば、入力装置は入力キー、タッチパネルおよびカメラであり、出力装置はディスプレイ、スピーカーおよびバイブレーターである。Communication device 440 is a device that communicates, ie, a receiver and a transmitter. For example, the communication device 440 is a communication chip or a NIC.
The input /output device 450 is an input device and an output device. For example, the input device is an input key, a touch panel and a camera, and the output device is a display, a speaker and a vibrator.
入出力装置450は入力装置および出力装置である。例えば、入力装置は入力キー、タッチパネルおよびカメラであり、出力装置はディスプレイ、スピーカーおよびバイブレーターである。
The input /
プロセッサ410は、管理部411を備える。管理部411はソフトウェアで実現される。
The processor 410 includes a management unit 411. The management unit 411 is realized by software.
補助記憶装置903には、管理部411としてコンピュータを機能させるための管理プログラムが記憶されている。管理プログラムは、メモリ420にロードされて、プロセッサ410によって実行される。
さらに、補助記憶装置430にはOSが記憶されている。OSの少なくとも一部は、メモリ420にロードされて、プロセッサ410によって実行される。
つまり、プロセッサ410は、OSを実行しながら、端末プログラムを実行する。
端末プログラムを実行して得られるデータは、メモリ420、補助記憶装置430、プロセッサ410内のレジスタまたはプロセッサ410内のキャッシュメモリといった記憶装置に記憶される。 The auxiliary storage device 903 stores a management program for causing a computer to function as themanagement unit 411. The management program is loaded into the memory 420 and executed by the processor 410.
Further, theauxiliary storage device 430 stores an OS. At least a portion of the OS is loaded into memory 420 and executed by processor 410.
That is, theprocessor 410 executes the terminal program while executing the OS.
Data obtained by executing the terminal program is stored in a storage device such as amemory 420, an auxiliary storage device 430, a register in the processor 410 or a cache memory in the processor 410.
さらに、補助記憶装置430にはOSが記憶されている。OSの少なくとも一部は、メモリ420にロードされて、プロセッサ410によって実行される。
つまり、プロセッサ410は、OSを実行しながら、端末プログラムを実行する。
端末プログラムを実行して得られるデータは、メモリ420、補助記憶装置430、プロセッサ410内のレジスタまたはプロセッサ410内のキャッシュメモリといった記憶装置に記憶される。 The auxiliary storage device 903 stores a management program for causing a computer to function as the
Further, the
That is, the
Data obtained by executing the terminal program is stored in a storage device such as a
メモリ420は記憶部421として機能する。但し、他の記憶装置が、メモリ420の代わりに、又は、メモリ420と共に、記憶部421として機能してもよい。
通信装置440は、通信部441として機能する。
入出力装置450は、表示部451として機能する。 Thememory 420 functions as the storage unit 421. However, another storage device may function as the storage unit 421 instead of the memory 420 or together with the memory 420.
Thecommunication device 440 functions as the communication unit 441.
The input /output device 450 functions as the display unit 451.
通信装置440は、通信部441として機能する。
入出力装置450は、表示部451として機能する。 The
The
The input /
管理装置400は、プロセッサ410を代替する複数のプロセッサを備えてもよい。複数のプロセッサは、プロセッサ410の役割を分担する。
The management device 400 may include a plurality of processors that replace the processor 410. The multiple processors share the role of the processor 410.
管理プログラムは、光ディスクまたはフラッシュメモリ等の不揮発性の記録媒体にコンピュータで読み取り可能に記録(格納)することができる。
The management program can be recorded (stored) in a computer readable manner on a non-volatile recording medium such as an optical disk or flash memory.
図22に基づいて、作業評価装置300の構成を説明する。
作業評価装置300は、さらに、判定結果通知部317を備える。
作業評価プログラムは、さらに、判定結果通知部317としてコンピュータを機能させる。 The configuration of thework evaluation apparatus 300 will be described based on FIG.
Thework evaluation apparatus 300 further includes a determination result notification unit 317.
The work evaluation program further causes the computer to function as the determinationresult notification unit 317.
作業評価装置300は、さらに、判定結果通知部317を備える。
作業評価プログラムは、さらに、判定結果通知部317としてコンピュータを機能させる。 The configuration of the
The
The work evaluation program further causes the computer to function as the determination
携帯端末200の構成は、実施の形態1における構成(図2参照)と同じである。
The configuration of portable terminal 200 is the same as that of the first embodiment (see FIG. 2).
***動作の説明***
図23に基づいて、作業評価方法を説明する。
ステップS410からステップS450は、実施の形態1におけるステップS110からステップS150と同じである。 *** Description of operation ***
The work evaluation method will be described based on FIG.
Steps S410 to S450 are the same as steps S110 to S150 in the first embodiment.
図23に基づいて、作業評価方法を説明する。
ステップS410からステップS450は、実施の形態1におけるステップS110からステップS150と同じである。 *** Description of operation ***
The work evaluation method will be described based on FIG.
Steps S410 to S450 are the same as steps S110 to S150 in the first embodiment.
ステップS460において、判定結果通知部317は、判定結果を管理装置400に通知する。
In step S460, the determination result notification unit 317 notifies the management device 400 of the determination result.
図24に基づいて、判定結果通知処理(S460)の手順を説明する。
ステップS461において、判定結果通知部317は、作業データに判定結果を追加する。 The procedure of the determination result notification process (S460) will be described based on FIG.
In step S461, the determinationresult notification unit 317 adds the determination result to the work data.
ステップS461において、判定結果通知部317は、作業データに判定結果を追加する。 The procedure of the determination result notification process (S460) will be described based on FIG.
In step S461, the determination
ステップS462において、判定結果通知部317は、通信部341を介して、作業データを管理装置400へ送信する。
例えば、判定結果通知部317は、作業データを含んだ電子メールを送信する。 In step S 462, the determinationresult notification unit 317 transmits work data to the management apparatus 400 via the communication unit 341.
For example, the determinationresult notification unit 317 transmits an e-mail including work data.
例えば、判定結果通知部317は、作業データを含んだ電子メールを送信する。 In step S 462, the determination
For example, the determination
ステップS463において、通信部441は、作業データを作業評価装置300から受信する。そして、記憶部421は作業データを記憶する。
さらに、表示部451は作業データを表示する。また、管理部411は作業データを管理する。 In step S463, thecommunication unit 441 receives work data from the work evaluation apparatus 300. Then, the storage unit 421 stores work data.
Further, thedisplay unit 451 displays work data. The management unit 411 also manages work data.
さらに、表示部451は作業データを表示する。また、管理部411は作業データを管理する。 In step S463, the
Further, the
***実施の形態4の効果***
作業評価システム100では、作業位置情報の適否についての判定結果が管理装置400へ送信される。これにより、作業者101が作成する作業結果報告(作業結果)だけでなく、客観的な評価に基づいた情報(判定結果)も管理者に通知することができる。 *** Effect of Embodiment 4 ***
In the work evaluation system 100, the determination result on the propriety of the work position information is transmitted to themanagement device 400. As a result, not only the work result report (work result) created by the worker 101 but also information (judgment result) based on an objective evaluation can be notified to the manager.
作業評価システム100では、作業位置情報の適否についての判定結果が管理装置400へ送信される。これにより、作業者101が作成する作業結果報告(作業結果)だけでなく、客観的な評価に基づいた情報(判定結果)も管理者に通知することができる。 *** Effect of Embodiment 4 ***
In the work evaluation system 100, the determination result on the propriety of the work position information is transmitted to the
***他の構成***
作業評価装置300は、実施の形態2と同じく、作業時間の適否を判定してもよい。つまり、作業評価装置300は、作業時間算出部314と標準時間算出部315と作業時間判定部316とを備えてもよい。
受付部262は、警告部263が警告を発しない場合には作業結果を受け付け、警告部263が警告を発する場合には作業結果を受け付けない。
つまり、受付部262は、作業位置情報と作業時間との両方が適切である場合には作業結果を受け付け、作業位置情報と作業時間との少なくともいずれかが適切でない場合には作業結果を受け付けない。
または、受付部262は、作業位置情報と作業時間との少なくともいずれかが適切である場合には作業結果を受け付け、作業位置情報と作業時間との両方が適切でない場合には作業結果を受け付けない。 *** Other configuration ***
As in the second embodiment, thework evaluation apparatus 300 may determine whether the work time is appropriate. That is, the work evaluation apparatus 300 may include the work time calculation unit 314, the standard time calculation unit 315, and the work time determination unit 316.
The receivingunit 262 receives the work result when the warning unit 263 does not issue a warning, and does not receive the work result when the warning unit 263 issues a warning.
That is, thereception unit 262 receives the work result when both the work position information and the work time are appropriate, and does not receive the work result when at least one of the work position information and the work time is not appropriate. .
Alternatively, the receivingunit 262 receives the work result when at least one of the work position information and the work time is appropriate, and does not receive the work result when both the work position information and the work time are not appropriate. .
作業評価装置300は、実施の形態2と同じく、作業時間の適否を判定してもよい。つまり、作業評価装置300は、作業時間算出部314と標準時間算出部315と作業時間判定部316とを備えてもよい。
受付部262は、警告部263が警告を発しない場合には作業結果を受け付け、警告部263が警告を発する場合には作業結果を受け付けない。
つまり、受付部262は、作業位置情報と作業時間との両方が適切である場合には作業結果を受け付け、作業位置情報と作業時間との少なくともいずれかが適切でない場合には作業結果を受け付けない。
または、受付部262は、作業位置情報と作業時間との少なくともいずれかが適切である場合には作業結果を受け付け、作業位置情報と作業時間との両方が適切でない場合には作業結果を受け付けない。 *** Other configuration ***
As in the second embodiment, the
The receiving
That is, the
Alternatively, the receiving
携帯端末200は、実施の形態3と同じく、作業位置情報(および作業時間)が適切でない場合には作業結果を受け付けなくてもよい。
As in the third embodiment, the portable terminal 200 may not receive the work result when the work position information (and the work time) is not appropriate.
作業評価装置300は、複数の装置で構成されてもよい。
The work evaluation device 300 may be configured by a plurality of devices.
現場データ取得部311と作業位置算出部312と作業位置判定部313といった作業評価装置300の要素は、携帯端末200に備えてもよい。
作業時間算出部314と標準時間算出部315と作業時間判定部316といった作業評価装置300の要素は、携帯端末200に備えてもよい。
判定結果通知部317は、携帯端末200に備えてもよい。
現場データベース111は、作業評価装置300または携帯端末200に記憶されてもよい。 Elements of thework evaluation apparatus 300 such as the site data acquisition unit 311, the work position calculation unit 312, and the work position determination unit 313 may be included in the mobile terminal 200.
Elements of thework evaluation device 300 such as the work time calculation unit 314, the standard time calculation unit 315, and the work time determination unit 316 may be included in the mobile terminal 200.
The determinationresult notification unit 317 may be included in the mobile terminal 200.
Thesite database 111 may be stored in the work evaluation device 300 or the mobile terminal 200.
作業時間算出部314と標準時間算出部315と作業時間判定部316といった作業評価装置300の要素は、携帯端末200に備えてもよい。
判定結果通知部317は、携帯端末200に備えてもよい。
現場データベース111は、作業評価装置300または携帯端末200に記憶されてもよい。 Elements of the
Elements of the
The determination
The
作業評価装置300とデータサーバ110とは、インターネット以外のネットワーク109で互いに接続されてもよい。例えば、作業評価装置300とデータサーバ110とは、イントラネット、LANまたはケーブルで互いに接続されてもよい。
The work evaluation apparatus 300 and the data server 110 may be connected to each other by a network 109 other than the Internet. For example, the work evaluation apparatus 300 and the data server 110 may be connected to each other by an intranet, a LAN or a cable.
作業位置算出部312は、各時刻のセンサデータを用いて作業時刻における携帯端末200の位置情報を算出し、作業時刻における携帯端末200の位置情報を現場範囲内の位置を示す位置情報に補正してもよい。補正後の位置情報は作業位置情報として使用される。
現場範囲は、作業現場の範囲である。具体的には、現場範囲は、建物内の空間または屋上より低い場所などである。
例えば、現場データが現場マップを含み、現場マップが現場範囲を示す。そして、作業位置算出部312は、現場マップが示す現場範囲に基づいて作業時刻における携帯端末200の位置情報を補正する。
さらに、作業位置算出部312は、初期位置情報および各時刻における携帯端末200の位置情報を補正してもよい。 The workposition calculation unit 312 calculates the position information of the portable terminal 200 at the work time using the sensor data of each time, and corrects the position information of the portable terminal 200 at the work time to position information indicating the position within the site range. May be The corrected position information is used as work position information.
The site range is the scope of the work site. Specifically, the site range is a space in a building or a place lower than the roof.
For example, site data includes site maps, and site maps indicate site coverage. Then, the workposition calculation unit 312 corrects the position information of the portable terminal 200 at the work time based on the site range indicated by the site map.
Furthermore, the workposition calculation unit 312 may correct the initial position information and the position information of the portable terminal 200 at each time.
現場範囲は、作業現場の範囲である。具体的には、現場範囲は、建物内の空間または屋上より低い場所などである。
例えば、現場データが現場マップを含み、現場マップが現場範囲を示す。そして、作業位置算出部312は、現場マップが示す現場範囲に基づいて作業時刻における携帯端末200の位置情報を補正する。
さらに、作業位置算出部312は、初期位置情報および各時刻における携帯端末200の位置情報を補正してもよい。 The work
The site range is the scope of the work site. Specifically, the site range is a space in a building or a place lower than the roof.
For example, site data includes site maps, and site maps indicate site coverage. Then, the work
Furthermore, the work
作業位置算出部312は、作業時刻以外の時刻における携帯端末200の位置情報を算出せずに、作業位置情報だけを算出してもよい。
例えば、作業位置算出部312は、作業時刻における気圧センサのセンサデータを用いて、作業時刻における携帯端末200の高さ情報を算出してもよい。 The workposition calculation unit 312 may calculate only work position information without calculating position information of the mobile terminal 200 at times other than the work time.
For example, the workposition calculation unit 312 may calculate the height information of the portable terminal 200 at the work time using the sensor data of the air pressure sensor at the work time.
例えば、作業位置算出部312は、作業時刻における気圧センサのセンサデータを用いて、作業時刻における携帯端末200の高さ情報を算出してもよい。 The work
For example, the work
センサ240は、携帯端末200の外部に設けてもよい。
例えば、作業者101は、携帯端末200と通信するセンサ端末を携帯端末200と共に所持する。そして、センサ端末がセンサ240を備える。 Thesensor 240 may be provided outside the mobile terminal 200.
For example, the worker 101 holds the sensor terminal communicating with themobile terminal 200 together with the mobile terminal 200. Then, the sensor terminal includes the sensor 240.
例えば、作業者101は、携帯端末200と通信するセンサ端末を携帯端末200と共に所持する。そして、センサ端末がセンサ240を備える。 The
For example, the worker 101 holds the sensor terminal communicating with the
位置情報は、1次元または2次元の情報であってもよい。
例えば、エレベーターまたは送電鉄塔での作業では高さ情報が重要である。また、レール上での作業では距離情報が重要である。高さ情報または距離情報が重要である場合、位置情報は、高さ情報または位置情報のような1次元の情報であればよい。高さ情報は、気圧センサのセンサデータを用いて算出される。
例えば、1フロアでの作業では高さ情報は重要でない。高さ情報が重要でない場合、位置情報は2次元の情報であればよい。 The position information may be one-dimensional or two-dimensional information.
For example, height information is important when working with elevators or transmission towers. In addition, distance information is important in work on the rail. When height information or distance information is important, the position information may be one-dimensional information such as height information or position information. The height information is calculated using sensor data of an air pressure sensor.
For example, height information is not important when working on one floor. If the height information is not important, the position information may be two-dimensional information.
例えば、エレベーターまたは送電鉄塔での作業では高さ情報が重要である。また、レール上での作業では距離情報が重要である。高さ情報または距離情報が重要である場合、位置情報は、高さ情報または位置情報のような1次元の情報であればよい。高さ情報は、気圧センサのセンサデータを用いて算出される。
例えば、1フロアでの作業では高さ情報は重要でない。高さ情報が重要でない場合、位置情報は2次元の情報であればよい。 The position information may be one-dimensional or two-dimensional information.
For example, height information is important when working with elevators or transmission towers. In addition, distance information is important in work on the rail. When height information or distance information is important, the position information may be one-dimensional information such as height information or position information. The height information is calculated using sensor data of an air pressure sensor.
For example, height information is not important when working on one floor. If the height information is not important, the position information may be two-dimensional information.
警告メッセージは、携帯端末200以外のディスプレイ装置に表示されてもよい。その場合、通信装置250が警告部263として機能し、警告部263が携帯端末200以外のディスプレイ装置に警告メッセージを送信する。そして、携帯端末200以外のディスプレイ装置が警告メッセージを表示する。具体的には、作業者101が携帯端末200以外のディスプレイ装置を身に付け、そのディスプレイ装置が警告メッセージを表示する。携帯端末200以外のディスプレイ装置の一例は、作業者101が装着するヘッドマウントディスプレイである。
The warning message may be displayed on a display device other than the mobile terminal 200. In that case, the communication device 250 functions as the warning unit 263, and the warning unit 263 transmits a warning message to display devices other than the portable terminal 200. Then, the display devices other than the mobile terminal 200 display a warning message. Specifically, the worker 101 wears a display device other than the portable terminal 200, and the display device displays a warning message. An example of a display device other than the mobile terminal 200 is a head mounted display worn by the worker 101.
警告部263は、ディスプレイによる表示以外の方法で警告を発してもよい。
例えば、警告部263は、スピーカーによる音声出力、バイブレーターによる振動または通信装置250によるメール送信によって警告を発する。 Thewarning unit 263 may issue a warning by a method other than display by a display.
For example, thewarning unit 263 issues a warning by voice output by a speaker, vibration by a vibrator, or e-mail transmission by the communication device 250.
例えば、警告部263は、スピーカーによる音声出力、バイブレーターによる振動または通信装置250によるメール送信によって警告を発する。 The
For example, the
作業者101は人間ではなくロボットであってもよい。
つまり、作業評価システム100が作業ロボットを備え、作業ロボットが携帯端末200を備えてもよい。例えば、作業ロボットは、携帯端末200を所持または内蔵する。 The worker 101 may not be a human but a robot.
That is, the work evaluation system 100 may include the work robot, and the work robot may include theportable terminal 200. For example, the work robot holds or incorporates the portable terminal 200.
つまり、作業評価システム100が作業ロボットを備え、作業ロボットが携帯端末200を備えてもよい。例えば、作業ロボットは、携帯端末200を所持または内蔵する。 The worker 101 may not be a human but a robot.
That is, the work evaluation system 100 may include the work robot, and the work robot may include the
***実施の形態の補足***
図25に基づいて、携帯端末200のハードウェア構成を説明する。
携帯端末200は処理回路290を備える。
処理回路290は、作業データ生成部211と初期位置データ生成部212と警告判定部213と記憶部221とを実現するハードウェアである。
処理回路290は、専用のハードウェアであってもよいし、メモリ220に格納されるプログラムを実行するプロセッサ210であってもよい。 *** Supplement of the embodiment ***
The hardware configuration of themobile terminal 200 will be described based on FIG.
Themobile terminal 200 includes a processing circuit 290.
Theprocessing circuit 290 is hardware that implements the work data generation unit 211, the initial position data generation unit 212, the warning determination unit 213, and the storage unit 221.
Theprocessing circuit 290 may be dedicated hardware or may be a processor 210 that executes a program stored in the memory 220.
図25に基づいて、携帯端末200のハードウェア構成を説明する。
携帯端末200は処理回路290を備える。
処理回路290は、作業データ生成部211と初期位置データ生成部212と警告判定部213と記憶部221とを実現するハードウェアである。
処理回路290は、専用のハードウェアであってもよいし、メモリ220に格納されるプログラムを実行するプロセッサ210であってもよい。 *** Supplement of the embodiment ***
The hardware configuration of the
The
The
The
処理回路290が専用のハードウェアである場合、処理回路290は、例えば、単一回路、複合回路、プログラム化したプロセッサ、並列プログラム化したプロセッサ、ASIC、FPGAまたはこれらの組み合わせである。
ASICはApplication Specific Integrated Circuitの略称であり、FPGAはField Programmable Gate Arrayの略称である。
携帯端末200は、処理回路290を代替する複数の処理回路を備えてもよい。複数の処理回路は、処理回路290の役割を分担する。 Whereprocessing circuit 290 is dedicated hardware, processing circuit 290 may be, for example, a single circuit, a complex circuit, a programmed processor, a parallel programmed processor, an ASIC, an FPGA, or a combination thereof.
ASIC is an abbreviation for Application Specific Integrated Circuit, and FPGA is an abbreviation for Field Programmable Gate Array.
Themobile terminal 200 may include a plurality of processing circuits that replace the processing circuit 290. The plurality of processing circuits share the role of the processing circuit 290.
ASICはApplication Specific Integrated Circuitの略称であり、FPGAはField Programmable Gate Arrayの略称である。
携帯端末200は、処理回路290を代替する複数の処理回路を備えてもよい。複数の処理回路は、処理回路290の役割を分担する。 Where
ASIC is an abbreviation for Application Specific Integrated Circuit, and FPGA is an abbreviation for Field Programmable Gate Array.
The
携帯端末200において、一部の機能が専用のハードウェアで実現されて、残りの機能がソフトウェアまたはファームウェアで実現されてもよい。
In the mobile terminal 200, some functions may be realized by dedicated hardware, and the remaining functions may be realized by software or firmware.
このように、処理回路290はハードウェア、ソフトウェア、ファームウェアまたはこれらの組み合わせで実現することができる。
As such, processing circuitry 290 may be implemented in hardware, software, firmware, or a combination thereof.
図26に基づいて、作業評価装置300のハードウェア構成を説明する。
作業評価装置300は処理回路390を備える。
処理回路390は、現場データ取得部311と作業位置算出部312と作業位置判定部313と作業時間算出部314と標準時間算出部315と作業時間判定部316と判定結果通知部317と記憶部321とを実現するハードウェアである。
処理回路390は、専用のハードウェアであってもよいし、メモリ320に格納されるプログラムを実行するプロセッサ310であってもよい。 The hardware configuration of thework evaluation apparatus 300 will be described based on FIG.
Thework evaluation apparatus 300 includes a processing circuit 390.
Theprocessing circuit 390 includes a site data acquisition unit 311, a work position calculation unit 312, a work position determination unit 313, a work time calculation unit 314, a standard time calculation unit 315, a work time determination unit 316, a judgment result notification unit 317, and a storage unit 321. Hardware that realizes
Theprocessing circuit 390 may be dedicated hardware or may be a processor 310 that executes a program stored in the memory 320.
作業評価装置300は処理回路390を備える。
処理回路390は、現場データ取得部311と作業位置算出部312と作業位置判定部313と作業時間算出部314と標準時間算出部315と作業時間判定部316と判定結果通知部317と記憶部321とを実現するハードウェアである。
処理回路390は、専用のハードウェアであってもよいし、メモリ320に格納されるプログラムを実行するプロセッサ310であってもよい。 The hardware configuration of the
The
The
The
処理回路390が専用のハードウェアである場合、処理回路390は、例えば、単一回路、複合回路、プログラム化したプロセッサ、並列プログラム化したプロセッサ、ASIC、FPGAまたはこれらの組み合わせである。
作業評価装置300は、処理回路390を代替する複数の処理回路を備えてもよい。複数の処理回路は、処理回路390の役割を分担する。 Ifprocessing circuit 390 is dedicated hardware, processing circuit 390 may be, for example, a single circuit, a complex circuit, a programmed processor, a parallel programmed processor, an ASIC, an FPGA, or a combination thereof.
Thework evaluation apparatus 300 may include a plurality of processing circuits that replace the processing circuit 390. The plurality of processing circuits share the role of the processing circuit 390.
作業評価装置300は、処理回路390を代替する複数の処理回路を備えてもよい。複数の処理回路は、処理回路390の役割を分担する。 If
The
作業評価装置300において、一部の機能が専用のハードウェアで実現されて、残りの機能がソフトウェアまたはファームウェアで実現されてもよい。
In the work evaluation apparatus 300, some functions may be realized by dedicated hardware, and the remaining functions may be realized by software or firmware.
このように、処理回路390はハードウェア、ソフトウェア、ファームウェアまたはこれらの組み合わせで実現することができる。
Thus, the processing circuitry 390 can be implemented in hardware, software, firmware, or a combination thereof.
図27に基づいて、管理装置400のハードウェア構成を説明する。
管理装置400は処理回路490を備える。
処理回路490は、管理部411と記憶部421とを実現するハードウェアである。
処理回路490は、専用のハードウェアであってもよいし、メモリ420に格納されるプログラムを実行するプロセッサ410であってもよい。 The hardware configuration of themanagement device 400 will be described based on FIG.
Themanagement device 400 comprises a processing circuit 490.
Theprocessing circuit 490 is hardware that implements the management unit 411 and the storage unit 421.
Theprocessing circuit 490 may be dedicated hardware or may be a processor 410 that executes a program stored in the memory 420.
管理装置400は処理回路490を備える。
処理回路490は、管理部411と記憶部421とを実現するハードウェアである。
処理回路490は、専用のハードウェアであってもよいし、メモリ420に格納されるプログラムを実行するプロセッサ410であってもよい。 The hardware configuration of the
The
The
The
処理回路490が専用のハードウェアである場合、処理回路490は、例えば、単一回路、複合回路、プログラム化したプロセッサ、並列プログラム化したプロセッサ、ASIC、FPGAまたはこれらの組み合わせである。
管理装置400は、処理回路490を代替する複数の処理回路を備えてもよい。複数の処理回路は、処理回路490の役割を分担する。 If theprocessing circuit 490 is dedicated hardware, then the processing circuit 490 is, for example, a single circuit, a complex circuit, a programmed processor, a parallel programmed processor, an ASIC, an FPGA, or a combination thereof.
Themanagement device 400 may include multiple processing circuits that replace the processing circuit 490. The plurality of processing circuits share the role of the processing circuit 490.
管理装置400は、処理回路490を代替する複数の処理回路を備えてもよい。複数の処理回路は、処理回路490の役割を分担する。 If the
The
管理装置400において、一部の機能が専用のハードウェアで実現されて、残りの機能がソフトウェアまたはファームウェアで実現されてもよい。
In the management apparatus 400, some functions may be realized by dedicated hardware, and the remaining functions may be realized by software or firmware.
このように、処理回路490はハードウェア、ソフトウェア、ファームウェアまたはこれらの組み合わせで実現することができる。
As such, the processing circuitry 490 can be implemented in hardware, software, firmware, or a combination thereof.
実施の形態は、好ましい形態の例示であり、本発明の技術的範囲を制限することを意図するものではない。実施の形態は、部分的に実施してもよいし、他の形態と組み合わせて実施してもよい。フローチャート等を用いて説明した手順は、適宜に変更してもよい。
The embodiments are exemplifications of preferred embodiments, and are not intended to limit the technical scope of the present invention. The embodiment may be partially implemented or may be implemented in combination with other embodiments. The procedure described using the flowchart and the like may be changed as appropriate.
100 作業評価システム、101 作業者、109 ネットワーク、110 データサーバ、111 現場データベース、112 時間式データベース、200 携帯端末、210 プロセッサ、211 作業データ生成部、212 初期位置データ生成部、213 警告判定部、220 メモリ、221 記憶部、230 補助記憶装置、240 センサ、250 通信装置、251 通信部、260 入出力装置、261 表示部、262 受付部、263 警告部、290 処理回路、300 作業評価装置、310 プロセッサ、311 現場データ取得部、312 作業位置算出部、313 作業位置判定部、314 作業時間算出部、315 標準時間算出部、316 作業時間判定部、317 判定結果通知部、320 メモリ、321 記憶部、330 補助記憶装置、340 通信装置、341 通信部、390 処理回路、400 管理装置、410 プロセッサ、411 管理部、420 メモリ、421 記憶部、430 補助記憶装置、440 通信装置、441 通信部、450 入出力装置、451 表示部、490 処理回路。
DESCRIPTION OF SYMBOLS 100 work evaluation system, 101 worker, 109 network, 110 data server, 111 field database, 112 time type database, 200 portable terminal, 210 processor, 211 work data generation part, 212 initial position data generation part, 213 warning judgment part, 220 memory, 221 storage unit, 230 auxiliary storage device, 240 sensor, 250 communication device, 251 communication unit, 260 input / output device, 261 display unit, 262 reception unit, 263 warning unit, 290 processing circuit, 300 work evaluation device, 310 Processor, 311 site data acquisition unit, 312 work position calculation unit, 313 work position determination unit, 314 work time calculation unit, 315 standard time calculation unit, 316 work time determination unit, 317 determination result notification unit, 320 Memory, 321 storage unit, 330 auxiliary storage unit, 340 communication unit, 341 communication unit, 390 processing circuit, 400 management unit, 410 processor, 411 management unit, 420 memory, 421 storage unit, 430 auxiliary storage unit, 440 communication unit, 441 communication unit, 450 input / output device, 451 display unit, 490 processing circuit.
Claims (16)
- 携帯端末と作業評価装置とを備え、
前記携帯端末は、
現場識別子に対応付けられ作業結果が入力される結果入力欄を表示する表示部と、
前記結果入力欄が選択された場合に前記現場識別子を含んだ作業データを生成する作業データ生成部とを備え、
前記作業評価装置は、
標準位置情報を含んだ現場データを現場識別子毎に有する現場データベースから、前記作業データに含まれる現場識別子に対応する現場データを取得する現場データ取得部と、
作業時刻における前記携帯端末の位置を示す作業位置情報を算出する作業位置算出部と、
取得された現場データに含まれる標準位置情報に基づいて前記作業位置情報の適否を判定する作業位置判定部とを備える
作業評価システム。 It has a mobile terminal and a work evaluation device,
The portable terminal is
A display unit that displays a result input field associated with a site identifier and in which a work result is input;
A work data generation unit for generating work data including the site identifier when the result input field is selected;
The work evaluation device is
A site data acquisition unit that acquires site data corresponding to a site identifier included in the operation data from a site database having site data including standard position information for each site identifier;
A work position calculation unit that calculates work position information indicating a position of the mobile terminal at a work time;
A work evaluation system comprising: a work position determination unit that determines the suitability of the work position information based on standard position information included in acquired site data. - 前記携帯端末は、慣性センサを備え、
前記作業位置算出部は、前記慣性センサによって得られる各時刻のセンサデータに基づいて、前記作業位置情報を算出する
請求項1に記載の作業評価システム。 The portable terminal comprises an inertial sensor,
The work evaluation system according to claim 1, wherein the work position calculation unit calculates the work position information based on sensor data of each time obtained by the inertial sensor. - 前記作業位置算出部は、ビーコンとバーコードと経路マッチングと位置入力と画像解析との少なくともいずれかによって初期位置情報を取得し、前記初期位置情報と各時刻のセンサデータとを用いて前記作業位置情報を算出する
請求項2に記載の作業評価システム。 The work position calculation unit acquires initial position information by at least one of a beacon, a barcode, path matching, position input, and image analysis, and the work position using the initial position information and sensor data of each time The work evaluation system according to claim 2, wherein the information is calculated. - 前記作業位置算出部は、各時刻のセンサデータを用いて前記作業時刻における前記携帯端末の位置情報を算出し、前記作業時刻における前記携帯端末の位置情報を現場範囲内の位置を示す位置情報に補正することによって前記作業位置情報を算出する
請求項2または請求項3に記載の作業評価システム。 The work position calculation unit calculates position information of the mobile terminal at the work time using sensor data of each time, and uses position information of the mobile terminal at the work time as position information indicating a position within the site range. The work evaluation system according to claim 2 or 3, wherein the work position information is calculated by performing correction. - 前記携帯端末は、気圧センサを備え、
前記作業位置算出部は、前記気圧センサによって得られる前記作業時刻のセンサデータに基づいて、前記携帯端末の高さ情報を前記作業位置情報として算出する
請求項1に記載の作業評価システム。 The portable terminal includes an air pressure sensor.
The work evaluation system according to claim 1, wherein the work position calculation unit calculates height information of the portable terminal as the work position information based on sensor data of the work time obtained by the air pressure sensor. - 前記作業位置算出部は、前記作業時刻のセンサデータを用いて前記作業時刻における前記携帯端末の高さ情報を算出し、前記作業時刻における前記携帯端末の高さ情報を現場範囲内の高さを示す高さ情報に補正することによって前記作業位置情報を算出する
請求項5に記載の作業評価システム。 The work position calculation unit calculates height information of the mobile terminal at the work time using sensor data of the work time, and height information of the mobile terminal at the work time is within the site range. The work evaluation system according to claim 5, wherein the work position information is calculated by correcting the height information to indicate. - 前記携帯端末は、前記作業位置情報が適切でない場合に警告を発する警告部を備える
請求項1から請求項6のいずれか1項に記載の作業評価システム。 The work evaluation system according to any one of claims 1 to 6, wherein the portable terminal includes a warning unit that issues a warning when the work position information is not appropriate. - 前記携帯端末は、
前記作業位置情報が適切である場合には前記結果入力欄に入力される作業結果を受け付け、前記作業位置情報が適切でない場合には前記結果入力欄に入力される作業結果を受け付けない受付部を備える
請求項1から請求項7のいずれか1項に記載の作業評価システム。 The portable terminal is
The receiving unit receives the work result input in the result input field if the work position information is appropriate, and does not receive the work result input in the result input field if the work position information is not appropriate The work evaluation system according to any one of claims 1 to 7, comprising. - 前記作業データは、時刻情報を含み、
各現場データは、作業現場のサイズを示す現場サイズ値を含み、
前記作業評価装置は、
前記作業データに含まれる時刻情報に基づいて作業時間を算出する作業時間算出部と、
前記取得された現場データに含まれる現場サイズ値を用いて標準時間を算出する標準時間算出部と、
前記標準時間に基づいて前記作業時間の適否を判定する作業時間判定部とを備える
請求項1から請求項6のいずれか1項に記載の作業評価システム。 The work data includes time information,
Each field data contains a field size value indicating the size of the work site,
The work evaluation device is
A work time calculation unit that calculates a work time based on time information included in the work data;
A standard time calculation unit that calculates a standard time using the spot size value included in the acquired spot data;
The work evaluation system according to any one of claims 1 to 6, further comprising: a work time determination unit that determines whether the work time is appropriate based on the standard time. - 前記携帯端末は、前記作業位置情報と前記作業時間との少なくともいずれかが適切でない場合に警告を発する警告部を備える
請求項9に記載の作業評価システム。 The work evaluation system according to claim 9, wherein the portable terminal includes a warning unit that issues a warning when at least one of the work position information and the work time is not appropriate. - 前記携帯端末は、前記作業位置情報と前記作業時間との両方が適切でない場合に警告を発する警告部を備える
請求項9に記載の作業評価システム。 The work evaluation system according to claim 9, wherein the mobile terminal comprises a warning unit that issues a warning when both the work position information and the work time are not appropriate. - 前記携帯端末は、
前記作業位置情報と前記作業時間との両方が適切である場合には前記結果入力欄に入力される作業結果を受け付け、前記作業位置情報と前記作業時間との少なくともいずれかが適切でない場合には前記結果入力欄に入力される作業結果を受け付けない受付部を備える
請求項9から請求項11のいずれか1項に記載の作業評価システム。 The portable terminal is
When both the work position information and the work time are appropriate, the work result input in the result input field is received, and when at least one of the work position information and the work time is not appropriate The work evaluation system according to any one of claims 9 to 11, further comprising a reception unit that does not receive a work result input in the result input field. - 前記携帯端末は、
前記作業位置情報と前記作業時間との少なくともいずれかが適切である場合には前記結果入力欄に入力される作業結果を受け付け、前記作業位置情報と前記作業時間との両方が適切でない場合には前記結果入力欄に入力される作業結果を受け付けない受付部を備える
請求項9から請求項11のいずれか1項に記載の作業評価システム。 The portable terminal is
When at least one of the work position information and the work time is appropriate, the work result input in the result input field is received, and when both the work position information and the work time are not appropriate The work evaluation system according to any one of claims 9 to 11, further comprising a reception unit that does not receive a work result input in the result input field. - 前記作業評価装置は、判定結果を管理装置に通知する判定結果通知部を備える
請求項1から請求項13のいずれか1項に記載の作業評価システム。 The work evaluation system according to any one of claims 1 to 13, wherein the work evaluation apparatus comprises a judgment result notification unit for notifying a management apparatus of a judgment result. - 前記作業評価システムは、作業ロボットを備え、
前記作業ロボットは、前記携帯端末を備える
請求項1から請求項14のいずれか1項に記載の作業評価システム。 The work evaluation system comprises a work robot,
The work evaluation system according to any one of claims 1 to 14, wherein the work robot comprises the portable terminal. - 携帯端末が、
現場識別子に対応付けられ作業結果が入力される結果入力欄を表示し、
前記結果入力欄が選択された場合に前記現場識別子を含んだ作業データを生成し、
作業評価装置が、
標準位置情報を含んだ現場データを現場識別子毎に有する現場データベースから、前記作業データに含まれる現場識別子に対応する現場データを取得し、
作業時刻における前記携帯端末の位置を示す作業位置情報を算出し、
取得された現場データに含まれる標準位置情報に基づいて前記作業位置情報の適否を判定する
作業評価方法。 Mobile terminal,
Display a result input field in which the work result is entered in association with the site identifier,
Generating work data including the site identifier when the result input field is selected;
The work evaluation system
The site data corresponding to the site identifier included in the work data is acquired from the site database having site data including standard position information for each site identifier,
Calculating work position information indicating the position of the portable terminal at work time;
The work evaluation method which determines the propriety of the said work position information based on the standard position information contained in the acquired field data.
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2017/040276 WO2019092811A1 (en) | 2017-11-08 | 2017-11-08 | Work evaluation system and work evaluation method |
| TW107101836A TWI663493B (en) | 2017-11-08 | 2018-01-18 | Work evaluation system and work evaluation method |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2017/040276 WO2019092811A1 (en) | 2017-11-08 | 2017-11-08 | Work evaluation system and work evaluation method |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2019092811A1 true WO2019092811A1 (en) | 2019-05-16 |
Family
ID=66438264
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2017/040276 WO2019092811A1 (en) | 2017-11-08 | 2017-11-08 | Work evaluation system and work evaluation method |
Country Status (2)
| Country | Link |
|---|---|
| TW (1) | TWI663493B (en) |
| WO (1) | WO2019092811A1 (en) |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004341875A (en) * | 2003-05-16 | 2004-12-02 | Niko Sangyo Kk | Working time calculation system |
| JP2011248404A (en) * | 2010-05-21 | 2011-12-08 | Fujifilm Corp | Inspection system and inspection method |
| JP2017157167A (en) * | 2016-03-04 | 2017-09-07 | 大陽日酸株式会社 | High-pressure gas facility management system, inspection management method, order placement method, and computer program |
Family Cites Families (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2002041465A (en) * | 1999-11-22 | 2002-02-08 | Mitsubishi Electric Corp | Communication system, database server, controller, processing terminal, relay server and manufacturing method of semiconductor device |
| TW515975B (en) * | 2000-08-21 | 2003-01-01 | Singapore Technologies Logisti | Order-handling inventory management system and method |
| JP4744877B2 (en) * | 2002-09-26 | 2011-08-10 | 豊田スチールセンター株式会社 | Cargo distribution management method, and computer-readable storage medium and program used therefor |
| TWI236611B (en) * | 2003-02-01 | 2005-07-21 | Baxter Int | Medical data communication notification and messaging system and method |
| TWM531618U (en) * | 2016-06-03 | 2016-11-01 | Univ Shu Te | Personnel management system for integrated activities |
-
2017
- 2017-11-08 WO PCT/JP2017/040276 patent/WO2019092811A1/en active Application Filing
-
2018
- 2018-01-18 TW TW107101836A patent/TWI663493B/en not_active IP Right Cessation
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2004341875A (en) * | 2003-05-16 | 2004-12-02 | Niko Sangyo Kk | Working time calculation system |
| JP2011248404A (en) * | 2010-05-21 | 2011-12-08 | Fujifilm Corp | Inspection system and inspection method |
| JP2017157167A (en) * | 2016-03-04 | 2017-09-07 | 大陽日酸株式会社 | High-pressure gas facility management system, inspection management method, order placement method, and computer program |
Non-Patent Citations (1)
| Title |
|---|
| FUJINO, KEITA: "Development of the application that can possibly grasp the indoor positional information using the smartphone (non-official translation)", PROCEEDINGS OF THE 78TH(2016) NATIONAL CONVENTION OF IPSJ (3), 10 March 2016 (2016-03-10), pages 3 - 429 -430 * |
Also Published As
| Publication number | Publication date |
|---|---|
| TWI663493B (en) | 2019-06-21 |
| TW201918808A (en) | 2019-05-16 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9510150B2 (en) | Integrating position information into a handheld tool | |
| EP3064963B1 (en) | System and method for mapping an indoor environment | |
| US20140365259A1 (en) | In-field installation record of a project | |
| US9207677B2 (en) | Vehicle positioning method and its system | |
| US10460267B2 (en) | Integration of as built data of a project | |
| JP2020021326A (en) | Information processing method, information processing apparatus and program | |
| JP7170803B2 (en) | Data storage device and data storage program | |
| US8035553B2 (en) | System and method for site calibration of a surveying device | |
| CN102137183A (en) | Mobile communication terminal and method | |
| EP4020394A1 (en) | Methods and apparatus to perform multiple-camera calibration | |
| US20170300038A1 (en) | 3d construction system and method | |
| JP7046873B2 (en) | Inspection management system, inspection management server, inspection management method and inspection management program | |
| US20210065446A1 (en) | Surveying data processing device, surveying data processing method, and surveying data processing program | |
| WO2019092811A1 (en) | Work evaluation system and work evaluation method | |
| RU2015109686A (en) | METHOD AND SERVER FOR DETERMINING GEOLOCATION OF ELECTRONIC DEVICE | |
| EP2889582A1 (en) | Information management system | |
| JP2020122697A (en) | Three-dimensional measurement apparatus and three-dimensional measurement program | |
| JP2011175447A (en) | Apparatus, method and program for generating three-dimensional position information | |
| US20220166835A1 (en) | Management apparatus, recording medium, and management method | |
| JP2011044098A (en) | Work support device and work support program | |
| JP7037988B2 (en) | Surveying system | |
| EP3475722A1 (en) | Indoor radio map verification | |
| JP2019218766A (en) | Construction work method and 3D laser scanner | |
| WO2022259322A1 (en) | Display control device, display control method, and program | |
| JP7259674B2 (en) | OBJECT DETECTION DEVICE, OBJECT DETECTION METHOD AND PROGRAM |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 17931691 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 17931691 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: JP |