WO2018124222A1 - Muscle-power assistance device - Google Patents
Muscle-power assistance device Download PDFInfo
- Publication number
- WO2018124222A1 WO2018124222A1 PCT/JP2017/047064 JP2017047064W WO2018124222A1 WO 2018124222 A1 WO2018124222 A1 WO 2018124222A1 JP 2017047064 W JP2017047064 W JP 2017047064W WO 2018124222 A1 WO2018124222 A1 WO 2018124222A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- tool
- relative
- wearing tool
- wearing
- force
- Prior art date
Links
Images













Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F2/00—Filters implantable into blood vessels; Prostheses, i.e. artificial substitutes or replacements for parts of the body; Appliances for connecting them with the body; Devices providing patency to, or preventing collapsing of, tubular structures of the body, e.g. stents
- A61F2/50—Prostheses not implantable in the body
- A61F2/54—Artificial arms or hands or parts thereof
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61F—FILTERS IMPLANTABLE INTO BLOOD VESSELS; PROSTHESES; DEVICES PROVIDING PATENCY TO, OR PREVENTING COLLAPSING OF, TUBULAR STRUCTURES OF THE BODY, e.g. STENTS; ORTHOPAEDIC, NURSING OR CONTRACEPTIVE DEVICES; FOMENTATION; TREATMENT OR PROTECTION OF EYES OR EARS; BANDAGES, DRESSINGS OR ABSORBENT PADS; FIRST-AID KITS
- A61F2/00—Filters implantable into blood vessels; Prostheses, i.e. artificial substitutes or replacements for parts of the body; Appliances for connecting them with the body; Devices providing patency to, or preventing collapsing of, tubular structures of the body, e.g. stents
- A61F2/50—Prostheses not implantable in the body
- A61F2/68—Operating or control means
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B25—HAND TOOLS; PORTABLE POWER-DRIVEN TOOLS; MANIPULATORS
- B25J—MANIPULATORS; CHAMBERS PROVIDED WITH MANIPULATION DEVICES
- B25J11/00—Manipulators not otherwise provided for
Definitions
- the present invention relates to a muscle strength assisting device that is worn by a wearer and assists the muscle strength of the wearer.
- a muscle force assisting device has attracted attention for the purpose of reducing the muscular burden on workers engaged in agriculture, construction industry, nursing care, etc. Yes.
- the muscular strength assisting device has a pair of attachments that are respectively attached to two parts of a human body with a joint positioned therebetween, and can hold the pair of attachments in a predetermined relative position.
- the muscle force assisting device of Patent Document 1 uses a ratchet mechanism to assist in maintaining the upper arm in a lifted state.
- maintenance by a ratchet mechanism can be cancelled
- the wearer of the muscle strength assisting device performs a predetermined work using the forearm while receiving the strength assisting force on the upper arm. Therefore, if the force assisting force is released not by the upper arm receiving the strength assisting force but by the forearm connected to the upper arm, the forearm in operation will unintentionally release the release switch. It is also assumed that you will press.
- the present invention has been made in consideration of such points, and an object thereof is to effectively prevent unintentional release of muscle force assist in a muscle force assist device.
- a first muscle strength assisting device includes: A first wearing tool attached to one of the two parts of the human body; A second wearing tool that is rotatable relative to the first wearing tool about an assist axis, and is attached to the other of the two parts; An assist mechanism capable of restricting relative rotation in at least one direction around the assist axis of the second wearing tool with respect to the first wearing tool; An index related to relative rotation of the first wearing tool and the second wearing tool about the assist axis, and an index related to a force for relatively rotating the first wearing tool and the second wearing tool.
- a sensor for obtaining at least one of A control unit for controlling the assist mechanism The control unit is opposite to the one direction of the second mounting tool relative to the first mounting tool in a state where relative rotation of the second mounting tool relative to the first mounting tool in the one direction is restricted. At least one of an index related to relative rotation in the other direction as a direction and an index related to a force for relatively rotating the second mounting tool in the other direction with respect to the first mounting tool is predetermined release When it is determined that the condition is satisfied, the assist mechanism is controlled so as to release the restriction on the relative rotation of the second wearing tool in the one direction with respect to the first wearing tool.
- the second muscle force assisting device comprises: A first wearing tool attached to one of the two parts of the human body; A second wearing tool that is rotatable relative to the first wearing tool about an assist axis, and is attached to the other of the two parts; An assist mechanism capable of restricting relative rotation in at least one direction around the assist axis of the second wearing tool with respect to the first wearing tool; A sensor for obtaining an index related to a force to relatively rotate the first wearing tool and the second wearing tool; A control unit for controlling the assist mechanism, The controller is configured to move the second wearing tool in the one direction relative to the first wearing tool in a state where relative rotation of the second wearing tool in the one direction with respect to the first wearing tool is restricted. When it is determined that the index related to the force to be relatively rotated satisfies a predetermined release condition, the restriction on the relative rotation of the second wearing tool in the one direction with respect to the first wearing tool is released. Control the assist mechanism.
- the control unit may be configured such that the relative rotation of the second wearing tool relative to the first wearing tool in the one direction is restricted.
- the predetermined release condition is that a force for rotating the second wearing tool relative to the first wearing tool in the one direction is the first. It may be greater than the force that restricts relative rotation of the second mounting tool in the one direction with respect to the mounting tool.
- the indicator is a relative displacement between the first wearing tool and the second wearing tool, a relative speed between the first wearing tool and the second wearing tool, and the first. It may be configured to include one or more of the relative acceleration of the first wearing tool and the second wearing tool, the relative jerk of the first wearing tool and the second wearing tool, the myoelectric potential of the wearer, and the degree of bulging of the wearer's muscle. Good.
- the first or second muscle force assisting device comprises: A posture sensor for detecting the posture of the muscle force assisting device;
- the control unit may adjust the predetermined release condition according to a detection result of the attitude sensor.
- the first or second muscle force assisting device comprises: It further includes an abnormality detection sensor for detecting an abnormality, When the abnormality detection sensor detects an abnormality in a state where relative rotation of the second wearing tool in the one direction with respect to the first wearing tool is restricted, the control unit detects the abnormality with respect to the first wearing tool. You may control the said assist mechanism so that the restriction
- the first or second muscle force assisting device comprises: It further includes an abnormality detection sensor for detecting an abnormality, In the state where the relative rotation of the second wearing tool in the one direction with respect to the first wearing tool is restricted, the control unit determines that the release condition is satisfied when the abnormality detecting sensor detects an abnormality. Even if it judges, you may make it control the said assist mechanism so that the restriction
- the abnormality detection sensor includes an electromyograph that detects a wearer's myoelectric potential, a photoreflector that detects the degree of the wearer's muscle bump, and a brightness detection
- an optical sensor that detects heat
- a thermal sensor that detects heat
- an attitude sensor that detects an attitude
- a distance sensor that detects a distance to a surrounding object
- a third muscle strength assisting device comprises: A first wearing tool attached to one of the two parts of the human body; A second mounting tool operable relative to the first mounting tool and attached to the other of the two parts; An assist mechanism capable of restricting the relative movement of the second wearing tool in at least one direction with respect to the first wearing tool; To obtain at least one of an index related to the relative motion of the first mounting tool and the second mounting tool, and an index related to a force for causing the first mounting tool and the second mounting tool to move relative to each other.
- a control unit for controlling the assist mechanism In the state where the relative movement of the second wearing tool relative to the first wearing tool in the one direction is restricted, the control unit is configured to change the one direction of the second wearing tool relative to the first wearing tool.
- a fourth muscle strength assisting device is as follows.
- a first wearing tool attached to one of the two parts of the human body;
- a second mounting tool operable relative to the first mounting tool and attached to the other of the two parts;
- An assist mechanism capable of restricting the relative movement of the second wearing tool in at least one direction with respect to the first wearing tool;
- a sensor for obtaining a force to relatively move the first wearing tool and the second wearing tool;
- a control unit for controlling the assist mechanism, In the state where the relative movement of the second wearing tool in the one direction with respect to the first wearing tool is restricted, the control unit moves the second wearing tool with respect to the first wearing tool.
- the restriction on the relative movement of the second wearing tool relative to the first wearing tool with respect to the first wearing tool is released.
- the assist mechanism is controlled.
- the control unit may be configured such that the relative movement of the second wearing tool relative to the first wearing tool in the one direction is restricted. An attempt is made to move the second wearing tool relative to the first wearing tool and an index related to the relative movement of the second wearing tool relative to the other direction opposite to the one direction with respect to the wearing tool.
- the assist so as to release the restriction of the relative movement of the second wearing tool in the one direction with respect to the first wearing tool when it is determined that at least one of the indices related to the force to be applied satisfies a predetermined release condition.
- the mechanism may be controlled.
- the predetermined release condition is that the force for moving the second wearing tool relative to the first wearing tool in the one direction is the first. It may be greater than the force that regulates the relative movement of the second wearing tool in the one direction with respect to the one wearing tool.
- the indicator is a relative displacement of the first wearing tool and the second wearing tool, a relative speed of the first wearing tool and the second wearing tool, the first It may be configured to include one or more of the relative acceleration of the first wearing tool and the second wearing tool, the relative jerk of the first wearing tool and the second wearing tool, the myoelectric potential of the wearer, and the degree of bulging of the wearer's muscle. Good.
- the third or fourth muscle strength assisting device is: A posture sensor for detecting the posture of the muscle force assisting device;
- the control unit may adjust the predetermined release condition according to a detection result of the attitude sensor.
- the third or fourth muscle strength assisting device is: It further includes an abnormality detection sensor for detecting an abnormality, When the abnormality detection sensor detects an abnormality in a state in which the relative movement of the second wearing tool in the one direction with respect to the first wearing tool is restricted, the control unit applies to the first wearing tool.
- the assist mechanism may be controlled so as to cancel the restriction of the relative movement of the second wearing tool in the one direction.
- the third or fourth muscle strength assisting device is: In the state where the relative movement of the second wearing tool in the one direction with respect to the first wearing tool is restricted, the control unit satisfies the release condition when the abnormality detecting sensor detects an abnormality.
- the assist mechanism may be controlled so as to maintain the restriction of the relative movement of the second wearing tool in the one direction with respect to the first wearing tool.
- the abnormality detection sensor includes an electromyograph that detects a wearer's myoelectric potential, a photoreflector that detects the degree of the wearer's muscle bump, and a brightness detection
- an optical sensor that detects heat
- a thermal sensor that detects heat
- an attitude sensor that detects an attitude
- a distance sensor that detects a distance to a surrounding object
- the muscle force assisting device in the muscle force assisting device, it is possible to effectively prevent the muscle force assisting force from being released unintentionally.
- FIG. 1 is a perspective view for explaining an embodiment of the present invention and showing a muscle strength assisting device together with a wearer.
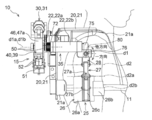
- FIG. 2 is a perspective view showing the muscular strength assisting device of FIG.
- FIG. 3 is a diagram showing a part of the muscle strength assisting device of FIG. 1 from the front.
- FIG. 4 is a view showing a part of the muscle strength assisting device of FIG. 1 from the outside.
- FIG. 5 is a view showing a part of the muscle strength assisting device of FIG. 1 from the rear.
- FIG. 6 is a view for explaining a power transmission mechanism of the muscle force assisting apparatus in FIG. 1.
- FIG. 7 is a diagram illustrating a main part of the position control device of the muscle force assisting device.
- FIG. 8 is a diagram illustrating a main part of the position control device of the muscle force assisting device in a state different from the state illustrated in FIG. 7.
- FIG. 9 is a diagram illustrating a main part of the position control device of the muscle force assisting device in a state different from the state illustrated in FIGS. 7 and 8.
- FIG. 10 is a block diagram for explaining a functional configuration of the control unit.
- FIG. 11 is a diagram illustrating an example of a control processing flow.
- FIG. 12 is a view showing a modification of the muscle strength assisting device, and is a perspective view showing the muscle strength assisting device together with the wearer.
- FIG. 13 is a diagram showing a part of the muscle strength assisting device of FIG. 12 from the front.
- FIG. 14 is a diagram showing a part of the muscle strength assisting device of FIG. 12 from the outside.
- FIG. 1 to 11 are diagrams for explaining an embodiment of the present invention and a modification thereof.
- FIG.1 and FIG.2 is a perspective view which shows the whole muscular strength assistance apparatus 10, and especially FIG. 1 has shown the muscular strength assistance apparatus 10 in the state with which the human body was mounted
- the muscle force assisting apparatus 10 includes a first mounting tool 20 and a second mounting tool 25 that are connected so as to be relatively movable, and an assist mechanism (position control device) that controls a relative position between the first mounting tool 20 and the second mounting tool 25. 15.
- the muscle force assisting apparatus 10 includes an index related to the relative movement of the first mounting tool 20 and the second mounting tool 25, and an index related to a force for relatively rotating the first mounting tool 20 and the second mounting tool 25.
- the sensor 80 for obtaining at least one of the above and the control unit 13 for controlling the assist mechanism 15 based on information from the sensor 80 are further provided.
- the assist mechanism 15 can be controlled by the control unit 13 to restrict the relative movement of the second mounting tool 25 relative to the first mounting tool 20 in at least one direction.
- the first mounting tool 20 and the second mounting tool 25 are capable of relative rotation about the first rotation axis d1 serving as an assist axis
- the assist mechanism 15 is configured to be the second mounting tool 25.
- the rotational position around the assist axis (first rotation axis d1) with respect to the first wearing tool 20 is controlled. That is, the assist axis refers to the rotation axis of the first wearing tool 20 and the second wearing tool 25 whose relative rotation is controlled by the assist force output from the muscle force assisting device 10 for assisting muscle strength.
- the assist mechanism 15 includes an output unit 30 held by the first mounting tool 20 and a transmission unit 35 that transmits the force output from the output unit 30 to the second mounting tool 25. is doing.
- the control unit 13 controls the operations of the output unit 30 and the transmission unit 35.
- the assist mechanism 15 can be controlled by the control unit 13 to restrict relative rotation of the second wearing tool 25 relative to the first wearing tool 20 in at least one direction around the assist axis d1.
- the first wearing tool 20 and the second wearing tool 25 are respectively attached to two parts of a human body connected by joints.
- the assist mechanism 15 controls the relative positions of the first wearing tool 20 and the second wearing tool 25 based on an instruction from the control unit 13 and assists the muscle strength of the two parts via the joint.
- the muscle strength assisting device 10 described here includes a device for effectively preventing muscle strength assistance at an unintended position so as to receive muscle strength assistance at a desired posture, and A device has been devised to effectively prevent unintentional release of muscle strength assistance.
- the first mounting tool 20 is attached to the trunk via the mounting belt 11 (FIGS. 3 to 5), and the second mounting tool 25 is attached to the upper arm via a mounting part 26 described later. .
- the muscle force assisting device 10 assists the movement of the shoulder.
- one joint enables multiple types of relative rotational movements about different axes.
- the shoulder joint is bent and extended by rotating the upper arm relative to the trunk about the bending axis da, and the adduction and outer rotation rotating the upper arm relative to the trunk about the inner and outer rotation axis db. It is possible to perform a rolling motion and an internal / external rotational motion in which the upper arm rotates relative to the trunk about the internal / external rotational axis dc.
- the illustrated muscle strength assisting device 10 assists in holding the upper arm in a predetermined position so that the upper arm is not lowered, as will be described later.
- the assist mechanism 15 has an output shaft 76 as an output unit for muscle assisting force (assist force).
- the output shaft 76 is rotatable relative to the first wearing tool 20 around the first rotation axis (assist axis) d1.
- the output shaft 76 is connected to the second mounting tool 25.
- the first rotation axis d1 that is the rotation axis of the output shaft 76 is provided corresponding to the shoulder bending axis da.
- the muscle force assisting device according to the present invention is not limited to the illustrated example, and assists at least one of bending motion, extension motion, adduction motion, abduction motion, internal rotation motion, and external rotation motion. Also good. Further, the muscle force assisting device according to the present invention is not limited to the illustrated example, and may assist the movement of the human body in the elbow, neck, waist, crotch, wrist and the like.
- the first wearing tool 20 has a center frame 21 and side frames 22.
- the central frame 21 is provided with a belt holding portion 21a to which the mounting belt 11 (FIGS. 3 to 5) is attached.
- the central frame 21 is attached to the wearer's torso, particularly at a position facing the back, via the mounting belt 11.
- the side frame 22 extends laterally outward from the central frame 21.
- the side frame 22 includes a rear frame portion 22a connected to the central frame 21, and a front extension frame portion 22b extending forward from the laterally outer end of the rear frame portion 22a.
- the rear frame portion 22a is disposed at a position facing the shoulder from the rear.
- the front extension frame portion 22b is disposed at a position facing the shoulder from the outside in the lateral direction.
- the side frame 22 is connected to the center frame 21 so as to be relatively rotatable about the third rotation axis d3.
- the third rotation axis d3 is provided corresponding to the inner / outer rotation axis dc of the shoulder.
- the illustrated muscle strength assisting device 10 that assists the movement of the shoulder is configured to act on both shoulders.
- side frames 22 are provided on both sides of the central frame 21.
- Each side frame 22 supports the transmission means 35 of the assist mechanism 15 and the like.
- a second mounting tool 25 is provided corresponding to each side frame 22.
- the pair of components provided on both sides with respect to the central frame 21 have symmetry but may be configured identically in the other. Therefore, in the following description and FIGS. 3 to 9, the structure acting on the right shoulder will be described.
- FIG. 3 shows the second mounting tool 25 from the front (front).
- the second mounting tool 25 is connected to an output shaft 76 of the transmission means 35 described later in detail.
- the second mounting tool 25 includes a mounting portion 26 attached to the human body, an action portion 28 fixed to the output shaft 76, and a connecting portion 27 that connects the mounting portion 26 and the action portion 28.
- the action unit 28 receives the force generated by the output unit 30 from the output shaft 76 which is the most downstream side (most output side) of the transmission unit 35.
- the connecting part 27 connects the action part 28 and the mounting part 26 so that the mounting part 26 rotates with respect to the first mounting tool 20 as the output shaft 76 rotates with respect to the first mounting tool 20.
- the mounting portion 26 is attached to the upper arm of the human body.
- the mounting portion 26 is preferably restricted from relative movement with the upper arm in the movement direction accompanying rotation around the first rotation axis d1.
- the illustrated mounting portion 26 includes a belt holding portion 26 a and an arm belt 26 b that form a cylindrical portion into which the upper arm is inserted, a bracket 26 c that is connected to the connecting portion 27, and have.
- the belt holding part 26a and the bracket 26c are made of, for example, a highly rigid resin molded product.
- the belt holding portion 26a and the bracket 26c are integrally formed.
- the belt holding portion 26a is disposed at a position facing the upper arm from the rear.
- the arm belt 26b is made of a belt material having flexibility, and is disposed at a position facing the upper arm mainly from the front. By adjusting the length of the arm belt 26b, the mounting portion 26 can stably hold the upper arm.
- the connecting portion 27 transmits the force supplied from the assist mechanism 15 to the mounting portion 26, the mounting portion 26 and the operation portion 26 and the operation portion are prevented from rotating relative to each other about the first rotation axis d1.
- the part 28 is connected. That is, since the second mounting tool 25 receives a rotational force about the first rotational axis d1 from the assist mechanism 15, the rotational force is input from the assist mechanism 15 except for play and elastic deformation of the component itself.
- the acting portion 28 and the mounting portion 26 that outputs an assisting force to the human body are prevented from relatively moving in the direction of the force input from the assist mechanism 15, that is, in the circumferential direction around the first rotation axis d1. ing.
- the connecting portion 27 is connected to the action portion 28 so as to be relatively rotatable with respect to the action portion 28 about a second rotation axis d2 perpendicular to the first rotation axis d1.
- the second rotation axis d2 is provided corresponding to the inner / outer rotation axis db of the shoulder.
- the connecting portion 27 is designed so that the distance between the first rotation axis d1 and the mounting portion 26 changes in the projection onto the plane orthogonal to the first rotation axis d1.
- the mounting part 26 and the action part 28 are preferably connected.
- the connecting portion 27 is configured so that the second mounting tool 25 forms a mechanism having three degrees of freedom between the operating portion 28 and the mounting portion 26.
- the mounting portion 26 are preferably connected.
- the connecting portion 27 is operatively connected to the first link 27a, a first link 27a operably connected to the working portion 28, and And a second link 27b operably connected to the mounting portion 26.
- the operation from the action portion 28 to the mounting portion 26 can be performed with three degrees of freedom.
- the mounting portion 26 can perform a relative motion with three degrees of freedom with respect to the action portion 28.
- first link 27a and the second link 27b are connected so as to be rotatable relative to each other about the first connecting rotation axis d2a.
- the first connection rotation axis d2a is perpendicular to the first rotation axis d1 and is parallel to the second rotation axis d2.
- the second link 27b and the mounting portion 26 are connected so as to be relatively rotatable about the second coupling rotation axis d2b.
- the second connection rotation axis d2b is perpendicular to the first rotation axis d1 and is parallel to the second rotation axis d2.
- connection position of the first link 27a and the second link 27b of the connecting portion 27 Is a connection position (hereinafter also referred to as “base end side connection position”) pj between the connecting portion 27 and the action portion 28 and a connection position (hereinafter referred to as “tip side connection position”) between the connecting portion 27 and the mounting portion 26. Is also always located on one side with respect to the virtual straight line vsl passing through dj.
- the intermediate connection position mj is always positioned on one side of the virtual straight line vsl that passes through the proximal end side connection position pj and the distal end side connection position dj. In other words, even when both ends of the connecting portion 27 are extended so as to be separated from each other, the intermediate connection position mj is not located on the virtual straight line vsl. In the illustrated example, the intermediate connection position mj is located on the same side as the output shaft 76 with respect to the virtual straight line vsl. As shown in FIG. 3, the intermediate connection position mj is located on the opposite side of the human body with the output shaft 76 across the virtual straight line vsl. According to this structure, when the connection part 27 shortens, it can avoid effectively that the intermediate part of the connection part 27 contacts a human body.
- connection part 27 has the biasing material 27c which functions as a biasing member.
- the urging member 27c is disposed across the first link 27a and the second link 27b.
- the biasing member 27c slightly lifts the second link 27b and the mounting part 26 against the weight of the second link 27b and the mounting part 26, and as a result, as shown in FIG. 3, the first link 27a and the second link 27b is kept bent. From the state shown in FIG. 3, the connecting portion 27 can both bend so as to increase the distance between both ends and bend so as to shorten it.
- the connecting portion 27 may be positioned on the virtual straight line vsl when it is most extended, and the intermediate connection positions mj are positioned on both sides of the virtual straight line vsl. May be possible.
- the intermediate connection position mj is the same as that on one side of the virtual straight line vsl, in particular, the output shaft 76 under the condition that the connecting portion 27 is most extended during actual use attached to the human body. It is preferable to be located on the side opposite to the human body. In this case, it is possible to effectively avoid the intermediate portion of the connecting portion 27 from coming into contact with the human body during use of the muscle force assisting device 10.
- the assist mechanism 15 includes the output unit 30 held by the first mounting tool 20 and the transmission unit 35 that transmits the force output from the output unit 30 to the second mounting tool 25. Yes.
- the assist mechanism 15 can control the relative positions of the first wearing tool 20 and the second wearing tool 25.
- the assist mechanism 15 is coupled to the first mounting tool 20 and the second mounting tool 25 so as to be relatively rotatable about a first rotation axis (assist axis), and an instruction from the control unit 13.
- the assist mechanism 15 restricts relative rotation in at least one direction around the assist axis d1 of the second mounting tool 25 with respect to the first mounting tool 20.
- the output unit 30 includes a so-called actuator, and outputs to the transmission unit 35 a force that is used as auxiliary muscle power for controlling the relative positions of the first mounting tool 20 and the second mounting tool 25.
- the assist mechanism 15 includes a retractable actuator, in other words, a linear motion type actuator 31 that changes the length in the longitudinal direction.
- the actuator 31 is connected to the transmission means 35 at one end.
- the actuator 31 is connected to the side frame 22 (rear frame portion 22a) of the first wearing tool 20 at the other end.
- a plurality of actuators 31 can be provided according to the muscular strength required for the output means 30.
- a member that can be expanded and contracted by fluid pressure can be used as the actuator 31.
- McKibben artificial muscle known as a hydraulic actuator can be used as the actuator 31.
- the actuator 31 composed of the McKibben artificial muscle is expanded and shortened by supplying a fluid (typically gas) to the inside.
- the actuator 31 generates a contracting force along with the shortening.
- the output unit 30 includes a fluid source (fluid pressure source) 32 that can supply a fluid to the actuator 31.
- a fluid source 32 configured as, for example, a compressor is supported by the central frame 21 of the first wearing tool 20.
- the transmission unit 35 transmits the muscle force assisting force output from the output unit 30 to the second wearing tool 25.
- the transmission means 35 described here includes a switching means 40 that switches between transmission and interruption of the force output from the output means 30 to the second mounting tool 25.
- FIG. 6 is a perspective view showing the configuration of the transmission means 35 together with the actuator 31 and the second mounting tool 25. In FIG. 6, the first wearing tool 20 and the like are omitted for easy understanding.
- the switching means 40 has a first member 41 and a second member 46, and functions as a drum brake mechanism or a band brake mechanism 39 as will be described in detail later.
- the first member 41 is supported by the side frame 22 of the first mounting tool 20, particularly the rear frame portion 22a, so as to be rotatable about the first intermediate rotation axis d1a.
- the second member 46 is connected to one end of the actuator 31 that moves linearly.
- the first member 41 and the second member 46 are capable of relative contact and separation. That is, the first member 41 and the second member 46 can perform an operation of separating from each other and an operation of approaching each other. In particular, in the illustrated example, the first member 41 and the second member 46 can take a relative position separated from each other and a relative position in contact with each other.
- the first member 41 can rotate without being restrained by the second member 46 at a position separated from the second member 46.
- the second member 46 holds the rotational position of the first member 41 in a state where the second member 46 is in contact with the first member 41.
- the second member 46 restricts the relative operation, particularly the relative rotation, between the second member 46 and the first member 41 in a state where the second member 46 is in contact with the first member 41.
- the first member 41 is connected to the second mounting tool 25, and in particular, the first member 41 is interlocked with the second mounting tool 25, and more specifically according to the operation of the first member 41.
- the second mounting tool 25 operates. Therefore, by adjusting the relative positions of the first member 41 and the second member 46, the upper arm of the wearer can be maintained at a predetermined position via the second wearing tool 25.
- the transmission means 35 includes a first relay shaft member 71 connected to the first member 41 of the switching means 40 and a first relay shaft member 71 that is linked to the first relay shaft member 71.
- the second relay shaft member 73 and the output shaft 76 interlocking with the second relay shaft member 73 are provided.
- the first relay shaft member 71 is held by the rear frame portion 22a that forms the side frame 22 of the first mounting tool 20.
- the first relay shaft member 71 is held rotatably about the first intermediate rotation axis d1a.
- the first member 41 is fixed to the first relay shaft member 71.
- the first member 41 is supported by the rear frame portion 22a of the side frame 22 and rotates around the first intermediate rotation axis d1a in synchronization with the first relay shaft member 71.
- a first transmission gear 72 is fixed to the first relay shaft member 71.
- the first transmission gear 72 is configured as a spur gear, for example.
- the second relay shaft member 73 is held by the front extending frame portion 22b that forms the side frame 22 of the first mounting tool 20.
- the second relay shaft member 73 is held rotatably about the second intermediate rotation axis d1b.
- a second transmission gear 74 is fixed to the second relay shaft member 73.
- the second transmission gear 74 is disposed in the vicinity of one end (rear end) of the second relay shaft member 73.
- the second transmission gear 74 is screwed with the first transmission gear 72. Therefore, the second relay shaft member 73 is interlocked with the first relay shaft member 71.
- the second transmission gear 74 has a configuration corresponding to the first transmission gear 72, and is configured as a spur gear, for example.
- the second intermediate rotation axis d1b that is the rotation axis of the second relay shaft member 73 is parallel to the first intermediate rotation axis d1a that is the rotation axis of the first relay shaft member 71.
- a third transmission gear 75 is fixed near the other end (front end) of the first relay shaft member 71.
- the third transmission gear 75 is configured as a helical gear, for example.
- the output shaft 76 is held by the front extension frame portion 22b, similarly to the second relay shaft member 73. As already described, the output shaft 76 is held rotatably about the first rotation axis (assist axis) d1.
- a fourth transmission gear 77 is fixed to the output shaft 76. The fourth transmission gear 77 is disposed in the vicinity of one end (outer end) of the output shaft 76. The fourth transmission gear 77 is screwed with the third transmission gear 75. As a result, the output shaft 76 is interlocked with the second relay shaft member 73, the first relay shaft member 71, and the first member 41 of the switching means 40. To do.
- the fourth transmission gear 77 has a configuration corresponding to the third transmission gear 75, and is configured as a helical gear, for example.
- the first rotation axis d1 that is the rotation axis of the output shaft 76 is perpendicular to the second intermediate rotation axis d1b that is the rotation axis of the second relay shaft member 73 and is shifted in the height direction.
- the other end portion (inward end portion) of the output shaft 76 is fixed to the action portion 28 of the second wearing tool 25.
- the first member 41 has a rotating drum 42 fixed to the first relay shaft member 71.
- the rotating drum 42 has a disc-shaped outer diameter, and the central axis of the rotating drum 42 is located on the first intermediate rotation axis d1a that is the rotation axis of the first relay shaft member 71.
- the rotating drum 42 is held by the rear frame portion 22 a of the side frame 22 via the first relay shaft member 71.
- the plate surface of the rotating drum 42 is aligned in the plane direction of the rear frame portion 22a. Therefore, the rotating drum 42 can be effectively prevented from greatly protruding from the wearer's body.
- the rotating drum 42 has a friction layer 42a on its surface layer.
- the friction layer 42a is a part that comes into contact with a second member 46 described later.
- the friction layer 42 a may be formed of rubber or the like that generates a larger frictional force with the second member 46.
- the second member 46 includes a first swing member 47a and a second swing member 47b.
- the first swing member 47a is connected to the actuator 31 via the bracket 48b.
- the switching means 40 has a pair of support body 50 formed in plate shape.
- the second member 46 (swing members 47a and 47b) is held by a pair of support bodies 50 so as to be operable, particularly swingable.
- the pair of supports 50 are arranged in a direction parallel to the first intermediate rotation axis d1a, and the rotary drum 42 and the pair of swing members 47a and 47b are disposed between the pair of supports 50. positioned.
- the rotary drum 42 can rotate relative to the support 50 about the first intermediate rotation axis d1a. That is, the rotating drum 42 is rotatable with respect to the support body 50 between the pair of support bodies 50. 7 to 9, the support 50 on the labor side is omitted.
- each of the swinging members 47a and 47b has an arcuate outer shape.
- Each swing member 47a, 47b is swingable with respect to the support 50 around one end portion.
- the swing axes of the swing members 47a and 47b are parallel to the first intermediate rotation axis d1a.
- the rotating drum 42 is disposed between the pair of swing members 47a and 47b.
- Each swinging member 47a, 47b faces the rotating drum 42 of the first member 41 from the outside in the radial direction around the first intermediate rotation axis d1a. Many portions of the outer peripheral surface of the rotating drum 42 are covered by the pair of swinging members 47a and 47b.
- the swinging members 47a and 47b can come into contact with the rotating drum 42 from the outside in the radial direction around the first intermediate rotation axis d1a by swinging with respect to the support 50. That is, the first member 41 and the second member 46 form a band brake mechanism 39.
- Each of the swinging members 47 a and 47 b forming the second member 46 includes an arc-shaped main body 48 and a friction body 49 that forms a second contact surface 46 a that contacts the first member 41.
- the friction body 49 comes into contact with the friction layer 42a of the rotary drum 42 and generates a frictional force with the friction layer 42a.
- the friction layer 42a is formed of a material that generates a sufficient frictional force, such as rubber.
- the switching unit 40 further includes a biasing member 52 as a biasing unit that biases the swinging members 47 a and 47 b away from the rotary drum 42.
- the urging member 52 is disposed between the support base 51 fixed to the support body 50 and the brackets 48c of the swing members 47a and 47b.
- the urging member 52 is formed by a tension spring.
- the main body 48 forming each of the swinging members 47a and 47b has a synchronous gear 48a.
- the synchronizing gear 48a adjusts the swinging motion of the pair of swinging members 47a and 47b.
- the pair of swing members 47a and 47b operate synchronously and symmetrically with respect to the rotating drum 42. Therefore, when the first swing member 47 a is in contact with the rotating drum 42 due to the action from the actuator 31, the second swing member 47 b is also in contact with the rotating drum 42. Further, when the first swing member 47 a is separated from the rotary drum 42 by the action of the actuator 31, the second swing member 47 b is also separated from the rotary drum 42.
- the first rotation axis (assist axis) d1 which is the rotation axis of the output shaft member 76 between the first mounting tool 20 holding the output shaft member 76 and the second mounting tool 25 connected to the output shaft member 76.
- Relative rotation around is restricted.
- the upper arm to which the second wearing tool 25 is worn is assisted by holding the muscles in a predetermined position, for example, a position lifted from the shoulder, with the assistance of the muscle force from the assist mechanism 15.
- the support body 50 is supported by the rear frame portion 22a that forms the side frame 22 of the first wearing tool 20.
- the support 50 is rotatable with respect to the rear frame portion 22a.
- the support body 50 is rotatably held with respect to the first relay shaft member 71, and as a result, is rotatable with respect to the rear frame portion 22a. Therefore, the second member 46 supported by the support body 50, the support base 51 fixed to the support body 50, and the like are not fixed to the first mounting tool 20 and are second to the first mounting tool 20.
- a relative rotation is possible about one intermediate rotation axis d1a.
- the switching means 40 further includes an adjusting means 37 for restricting free rotation of the support 50 and the second member 46.
- the state of the first member 41, the second member 46, and the support 50 is controlled by the balance between the force supplied from the adjusting unit 37 and the force supplied from the output unit 30.
- the adjusting means 37 is formed as a biasing member 38 that biases the support 50 and the second member 46 in one direction.
- One end of the urging member 38 is attached to the rear frame portion 22a of the side frame 22, and the other end is attached to the bracket 48c of the second swing member 47b.
- the urging member 38 is formed by a tension spring that forms urging means.
- the force applied from the actuator 31 Is smaller than the urging force from the urging member 38 constituting the adjusting means 37. That is, the force required to swing the swinging members 47 a and 47 b forming the second member 46 with respect to the support 50 is greater than the force required to rotate the support 50 with respect to the first wearing tool 20. It is getting smaller. Therefore, before the support body 50 rotates with respect to the first mounting tool 20, the swing members 47 a and 47 b forming the second member 46 swing with respect to the support body 50. Thereby, the relative rotation of the first member 41 and the second member 46 is restricted, and the free relative movement of the first mounting tool 20 and the second mounting tool 25 is restricted.
- the support body 50 is attached to the first wearing tool 20 by inputting a force against the urging force from the urging member 38 constituting the adjusting means 37. It can be rotated counterclockwise from the state shown in FIG. 8 to the state shown in FIG.
- the actuator 31 is a McKibben artificial muscle
- the support 50 cannot be rotated clockwise from the state of FIG. That is, in the muscular strength assisting apparatus 10 shown in FIG. 8, the first member 41 interlocked with the second mounting tool 25 is unidirectional with respect to the first mounting tool 20 around the first intermediate rotation axis d1a (FIG. 8). In the other direction (counterclockwise direction in FIG.
- the first member 41 interlocked with the second mounting tool 25 is moved in one direction (counterclockwise direction) with respect to the first mounting tool 20 around the first intermediate rotation axis d1a.
- the rotation can be realized by the operation of raising the upper arm of the wearer of the muscle strength assisting apparatus 10.
- the second mounting tool 25 is moved from the state of FIG. 8 to the state of FIG. It can also be rotated relative to the mounting tool 20.
- Such an operation of the muscle force assisting device 10 means assisting the muscle force in the operation of lifting the upper arm.
- the center frame 21 of the first mounting tool 20 is attached to the trunk using the mounting belt 11. Further, the mounting portion 26 of the second mounting tool 25 is attached to the upper arm.
- the illustrated muscle force assisting device 10 can be maintained in either the free rotation mode shown in FIG. 7 or the rotation braking mode shown in FIG.
- the fluid in the actuator 31 is exhausted, and the actuator 31 extends. Therefore, the swinging members 47 a and 47 b of the second member 46 do not receive a force from the actuator 31 toward the rotating drum 42 that forms the first member 41.
- the swinging members 47 a and 47 b forming the second member 46 are urged by the urging member 52 in a direction away from the rotating drum 42 forming the first member 41. Therefore, in the free rotation mode, the first member 41 freely rotates around the first intermediate rotation axis d1a without being restricted by the second member 46 from rotating around the first intermediate rotation axis d1a. be able to.
- the second member 46 and the support member 50 that supports the second member 46 receive a force that rotates clockwise in FIG. 7 due to the biasing force (pulling force) from the biasing member 38 that forms the adjusting means 37. ing.
- the force from the adjusting means 37 mainly affects the rotation of the second member 46 and the support body 50 with respect to the first wearing tool 20, and affects the swing of the second member 46 with respect to the support body 50. It is a force that is difficult to give. Therefore, in the free rotation mode, the first member 41 and the second member 46 are separated from each other.
- the second mounting tool 25 interlocked with the first member 41 can freely rotate with respect to the first mounting tool 20. Therefore, the wearer of the muscle strength assisting apparatus 10 can freely rotate the upper arm, to which the mounting portion 26 of the second mounting tool 25 is mounted, with respect to the trunk around the first rotation axis (assist axis) d1. it can. That is, the wearer can perform a bending exercise and an extension exercise without being restrained by the muscle force assisting device 10.
- the fluid is supplied from the fluid source 32 into the actuator 31, and the actuator 31 is shortened.
- the output means 30 acts on the first swing member 47a so as to attract the first swing member 47a.
- the force applied from the actuator 31 to the first swing member 47 a operates the first swing member 47 a toward the rotary drum 42 that forms the first member 41.
- the second contact surface 46a formed by the friction body 49 of the swinging members 47a and 47b is in contact with the first contact surface 41a formed by the friction layer 42a forming the outer peripheral surface of the rotating drum 42. Touch.
- the second member 46 holds the first member 41 by the frictional force between the friction body 49 and the friction layer 42a. As a result, the relative rotation between the second member 46 and the first member 41 is restricted, and as a result, the rotation of the rotating drum 42 and the output shaft 76 is restricted.
- the second wearing tool 25 is restricted from rotating with respect to the first wearing tool 20 in one direction (clockwise direction in FIG. 4) about the first rotation axis (assist axis) d1.
- the muscular strength assisting device 10 can assist in maintaining the lifted upper arm at the position, and can effectively suppress the upper arm from being lowered.
- the second member 46 is supported by the support body 50, and the support body 50 is rotatable with respect to the first wearing tool 20 by resisting the urging force from the adjusting means 37. Therefore, the wearer can further lift the upper arm by rotating the support body 50 against the urging force of the adjusting means 37 from the state shown in FIG. That is, the support body 50 rotates together with the first member 41 and the second member 46 about the first intermediate rotation axis d1a from the state of FIG. 8 to the state of FIG.
- the first mounting tool 20 can rotate in the other direction (counterclockwise direction in FIG. 4) about the first rotation axis (assist axis) d1.
- the second wearing tool 25 is restricted from rotating in one direction (counterclockwise direction in FIG. 4) around the first rotation axis (assist axis) d1 with respect to the first wearing tool 20.
- the second mounting tool 25 is allowed to rotate in the other direction (counterclockwise direction in FIG. 4) about the first rotation axis (assist axis) d1 with respect to the first mounting tool 20.
- a rotation drive mode may be further added.
- the actuator 31 is further shortened from the state of the rotational braking mode.
- the support body 50 is rotated around the first intermediate rotation axis d1a together with the first member 41 and the second member 46 against the biasing force of the adjusting means 37.
- the second mounting tool 25 can be rotated in the other direction around the first rotation axis d1 with respect to the first mounting tool 20. That is, in the rotational drive mode, it is possible to assist the lifting of the upper arm by moving the second mounting tool 25 relative to the first mounting tool 20, for example.
- the operation of the output means 30 is controlled by the control unit 13.
- the control unit 13 is supported by the central frame 21 of the first wearing tool 20 together with the fluid source 32.
- the control unit 13 controls the operation of the actuator 31 by controlling the supply of fluid (for example, air) from the fluid source 32 to the actuator 31 and the exhaust of the fluid from the actuator 31.
- fluid for example, air
- FIG. 10 is a block diagram for explaining a functional configuration of the control unit 13.
- the control unit 13 is electrically connected to a sensor 80 provided in the muscle force assisting apparatus 10, and controls the assist mechanism 15, particularly the output means 30 of the assist mechanism 15 based on a signal from the sensor 80. .
- the control unit 13 operates the output unit 30 based on the detection result of the sensor 80 to start the regulation of the relative movement between the first wearing tool 20 and the second wearing tool 25. . That is, the control unit 13 starts assisting muscle strength based on the detection result of the sensor 80.
- the control unit 13 operates the output unit 30 based on the detection result of the sensor 80 to release the restriction on the relative operation of the first wearing tool 20 and the second wearing tool 25. That is, the control unit 13 stops assisting muscle strength based on the detection result of the sensor 80.
- the sensor 80 can obtain an index related to the relative movement of the first wearing tool 20 and the second wearing tool 25.
- the illustrated sensor 80 can obtain an index related to the relative rotation of the first wearing tool 20 and the second wearing tool 25 around the assist axis d1.
- the sensor 80 includes a relative displacement between the first wearing tool 20 and the second wearing tool 25, a relative speed between the first wearing tool 20 and the second wearing tool 25, and the first wearing tool 20 and the second wearing tool 25.
- at least one of the relative jerk of the first wearing tool 20 and the second wearing tool 25 is detected.
- “jerk” is obtained by differentiating acceleration with respect to time.
- a displacement sensor, a speed sensor, and an acceleration sensor can be used. Further, by calculating one or more detection results of any one of the displacement sensor, the speed sensor, the acceleration sensor, and the gyro sensor, the relative displacement of the first mounting tool 20 and the second mounting tool 25, the first mounting tool 20 and the second mounting tool.
- the relative speed of the mounting tool 25, the relative acceleration of the first mounting tool 20 and the second mounting tool 25, and the relative jerk of the first mounting tool 20 and the second mounting tool 25 can also be specified.
- the senor 80 is supported by the front extension frame portion 22b of the side frame 22 of the first wearing tool 20.
- the sensor 80 is disposed at a position facing the output shaft member 76 from the outside along the first rotation axis d1.
- the sensor 80 can monitor the rotation operation of the output shaft member 76 and measure an index related to the rotation operation of the output shaft member 76.
- a potentiometer can be used as a specific example of a sensor other than the sensor 80 shown in FIGS. 3 to 5.
- a potentiometer By using a potentiometer, a resistance value that varies with the rotation of the output shaft member 76 can be measured, and the rotational position (rotation angle) of the output shaft member 76 can be calculated from the voltage value. That is, this potentiometer can be used as a displacement sensor.
- the potentiometer is provided between the output shaft member 76 and a bearing fixing portion for receiving the output shaft member 76 provided on the front extension frame portion 22b. Can be arranged. It is also possible to specify the relative acceleration of the first wearing tool 20 and the second wearing tool 25 by measuring and calculating the amount of change and the change time of the voltage value acquired from the potentiometer. In this case, the potentiometer is used as an acceleration sensor.
- a speed sensor and an acceleration sensor may be provided in the first wearing tool 20 and the second wearing tool 25, respectively.
- the relative speed and the speed acceleration of the first wearing tool 20 and the second wearing tool 25 can be specified.
- the sensor installed in either the first wearing tool 20 or the second wearing tool 25 may be omitted.
- one sensor provided in the first wearing tool 20 and the second wearing tool 25 can specify the relative speed and relative acceleration between the wearing tool provided with the sensor and the ground.
- the senor 80 is an index related to a force for moving the second wearing tool 25 relative to the first wearing tool 20, particularly in the illustrated example, the second with respect to the first wearing tool 20. It is also possible to detect an index related to a force for relatively rotating the mounting tool 25 around the first rotation axis d1.
- Examples of the force monitored by the sensor 80 include a translational force and a rotational force such as a moment and a torque.
- the index related to the force for relative movement may be the magnitude of the force such as translational force or rotational force itself, or may be the myoelectric potential of the wearer or the degree of bulging of the wearer's muscle. Good. According to these indexes, the magnitude of the force for causing the first wearing tool 20 and the second wearing tool 25 to relatively move can be evaluated directly or indirectly.
- Examples of the sensor 80 that can detect such an index include a sensor for detecting force such as a torque sensor, a displacement sensor, a speed sensor, an acceleration sensor, an electromyograph, a photo reflector, and the like.
- a sensor for detecting a force such as a torque sensor as the sensor 80
- the magnitude of the translational force and the rotational force for causing the first wearing tool 20 and the second wearing tool 25 to move relative to each other is directly evaluated. be able to.
- By calculating outputs from the displacement sensor, the speed sensor, and the acceleration sensor it is possible to evaluate the magnitude of a force such as a translational force or a rotational force for causing the first mounting tool 20 and the second mounting tool 25 to move relative to each other. it can.
- the electromyograph can detect the myoelectric potential of the wearer, and the photoreflector can evaluate the degree of the muscular bulge of the wearer. Therefore, according to the electromyograph or the photoreflector, the magnitude of the translational force or the rotational force for causing the first mounting tool 20 and the second mounting tool 25 to move relative to each other can be indirectly evaluated.
- the illustrated muscle force assisting device 10 further includes a posture sensor 81 that detects the posture of the force assisting device 10 and an abnormality detection sensor 82 that detects an abnormality.
- the control unit 13 is electrically connected to the attitude sensor 81 and the abnormality detection sensor 82, and controls the assist mechanism 15 based on signals from the attitude sensor 81 and the abnormality detection sensor 82, particularly the output means 30 of the assist mechanism 15. Control.
- the control unit 13 is based on the detection result of the posture sensor 81, and the time for starting the muscular strength assist and the condition for starting the muscular strength assist supply should be satisfied. It is possible to change the length, conditions for stopping the assistance of muscle strength, and the like. Further, in the illustrated muscle strength assisting apparatus 10, the control unit 13 can stop assisting muscle strength based on the detection result of the abnormality detection sensor 82.
- the posture sensor 81 is a sensor for directly or indirectly detecting the posture of the muscle force assisting apparatus 10. By detecting the posture of the muscle force assisting device 10, the posture of the wearer wearing the muscle force assisting device 10 can be grasped.
- the attitude sensor 81 an attitude sensor or a gyro sensor can be used.
- the gyro sensor can also be used as the sensor 80 described above.
- the attitude sensor 81 is attached to the central frame 21 of the side frame 22.
- the posture sensor 81 is positioned substantially at the center of the first wearing tool 20 and detects the posture of the muscle force assisting apparatus 10.
- the abnormality detection sensor 82 is a sensor that detects the presence or absence of an abnormality in the vicinity of the muscle force assisting device 10, the wearer of the muscle force assisting device 10, and the muscle force assisting device 10.
- an electromyograph for detecting the wearer's myoelectric potential
- a photo reflector for detecting the degree of the wearer's muscle elevation
- a light sensor for detecting brightness
- a heat sensor for detecting heat
- a posture detection A posture sensor that detects a distance from a surrounding object, a voltmeter or an ammeter that monitors a power supply state of the muscle force assisting apparatus 10, a pressure gauge that monitors a pressure state of the fluid source 32, and the like Can do.
- the abnormality detection sensor 82 may include two or more types of sensors. According to the abnormality detection sensor 82 including an electromyograph or a photo reflector, the wearer's abnormality can be detected. According to the abnormality detection sensor 82 including an optical sensor and a thermal sensor, it is possible to detect an abnormality in the surrounding environment, for example, the presence of a flame. Moreover, according to the abnormality detection sensor 82 which consists of an attitude
- FIG. 11 shows an example of a control processing flow by the control unit 13 related to the supply of muscle strength assisting force.
- description will be made based on the control processing flow shown in FIG.
- the control unit 13 first determines whether or not the relative position of the second mounting tool 25 with respect to the first mounting tool 20 is within a predetermined range (step S11 in FIG. 11).
- the relative position of the second mounting tool 25 with respect to the first mounting tool 20 can be detected by the sensor 80. Therefore, the control unit 13 makes the first determination based on the detection result of the sensor 80.
- the sensor 80 can specify the relative position of the second wearing tool 25 with respect to the first wearing tool 20 by an angle as follows, for example. As shown in FIG. 4, the relative position of the second wearing tool 25 with respect to the first wearing tool 20 in a state where the arm is lowered along the body is set to 0 °. The angle moved forward from this state is specified as a positive value. For example, a state in which the arm is extended from the body in the horizontal direction while standing is specified as 90 °. Therefore, an angle obtained by rotating the second mounting tool 25 in the other direction (clockwise direction in FIG. 4) around the first rotation axis d1 with respect to the first mounting tool 20 from the state of FIG. 4 as a positive value. And expressed as a relative position of the second mounting tool 25 to the first mounting tool 20.
- the predetermined range of the relative position of the second wearing tool 25 to the first wearing tool 20 that should be satisfied when the supply of the muscle force assisting force is started is determined based on the posture of the wearer who is considered to be required to supply the muscle force assisting force. Can be done. That is, the predetermined range is determined so as to include the relative position of the second wearing tool 25 with respect to the first wearing tool 20 when the wearer takes various postures that require the supply of muscle strength assisting force. On the other hand, the predetermined range is determined so as not to include the relative position of the second wearing device 25 with respect to the first wearing device 20 when the wearer takes a posture that is considered unnecessary to supply the muscle force assisting force. obtain.
- the control unit 13 may change the predetermined range determined in step S ⁇ b> 11 based on the detection result of the attitude sensor 81.
- the posture of the wearer wearing the muscular strength assisting device 10 can be specified.
- the posture in which the supply of the muscle force assisting force is required, and in the illustrated example, the position of the upper arm that is required to supply the muscle force assisting force can be changed based on the posture of the wearer wearing the muscle force assisting device 10. For example, the position of the upper arm where a bendable wearer wants to receive strength support is almost the same as the position of the upper arm where a wearer who stands up with his back stretched wants to receive strength support. Therefore, it is considered to be higher than the horizontal direction.
- the predetermined range of the relative position of the second mounting tool 25 to the first mounting tool 20 determined by the control unit 13 is a change in the orientation of the first mounting tool 20 between the forward bent state and the standing state. It can be said that it is preferable to apply only correction.
- the predetermined range in a state where the back is stretched may be set to 100 ° to 130 °
- the predetermined range in the forward bent state may be set to 110 ° to 140 °.
- the control unit 13 can more effectively prevent the muscle force assisting force from being supplied at an unintended position by adjusting the predetermined range according to the detection result of the posture sensor 81.
- step S11 When it is determined that the relative position of the second mounting tool 25 with respect to the first mounting tool 20 is outside the predetermined range (“No” in step S11 in FIG. 11), for example, after a predetermined time has elapsed, the process S11 is performed again. It is implemented and it is judged whether the relative position with respect to the 1st mounting tool 20 of the 2nd mounting tool 25 is in a predetermined range (process S11 of FIG. 11).
- step S11 in FIG. 11 If it is determined that the relative position of the second wearing tool 25 with respect to the first wearing tool 20 is outside the predetermined range (“Yes” in step S11 in FIG. 11), then the control unit 13 is detected by the sensor 80.
- the index related to the relative rotation around the assist axis (first rotation axis) d1 of the first wearing tool 20 and the second wearing tool 25 satisfies a predetermined condition (“start condition”) over a certain period. Is determined (step S12 in FIG. 11).
- the start condition may be determined according to a work that the wearer intends to perform while wearing the muscle strength assisting device 10. It is preferable that the start condition is a condition reflecting an operation representing an intention display in which the wearer of the muscle strength assisting device 10 requests the muscle strength assisting force. Moreover, it is preferable that the operation
- the wearer's movement at the time of a fall or emergency is distinguished from the movement of the start condition, and at the time of a fall or emergency, the muscle strength assisting device 10 is maintained in the free rotation mode, and the wearer's motion is restrained by the muscle strength assisting device 10. It is preferable not to do so.
- an indicator related to the relative rotation may indicate that the relative rotation is stopped or the relative rotation is stopped.
- the relative displacement between the first wearing tool 20 and the second wearing tool 25 is a predetermined value or less or less than a predetermined value
- the relative speed between the first wearing tool 20 and the second wearing tool 25 is less than a predetermined value or It is less than a predetermined value
- the relative acceleration of the first wearing tool 20 and the second wearing tool 25 is less than or less than a predetermined value
- the relative jerk of the first wearing tool 20 and the second wearing tool 25 is a predetermined value
- the start condition may be the following or less than a predetermined value, a combination of these conditions, or a combination of these conditions and other conditions.
- this condition is an act of waiting for the supply of the muscle strength assisting force for the wearer, and can also be said to be a direct action to receive the muscle strength assisting. Accordingly, it is facilitated to start supplying the muscle force assisting force at the intended position.
- control unit 13 determines whether or not the start condition is continuously satisfied over a certain period. This certain period can be set to a time sufficient to prevent the start condition from being unintentionally satisfied. Therefore, the wearer of the muscular strength assisting device 10 may be set according to the contents of the work to be performed while wearing the muscular strength assisting device 10. By satisfying the start condition for a certain period of time as a requirement for starting the supply of the muscular strength assisting force, it is possible to effectively prevent the muscular strength from being received at an unintended position.
- the control unit 13 may change the start condition determined in step S ⁇ b> 12 and the length of a certain period based on the detection result of the attitude sensor 81.
- the ease of operation of the wearer wearing the muscular strength assisting device 10 changes according to the posture.
- the ease of movement of the wearer in a posture to receive muscular strength assistance changes depending on the general posture of the wearer. For example, maintaining the arm in the raised position while standing is easier than maintaining the arm in the squatting position. Therefore, when it is determined from the detection result of the posture sensor 81 that the wearer is crouching, the length of a certain period in which the start condition should be satisfied may be changed. In this case, it is possible to smoothly receive the supply of the muscle force assisting force with the intended posture while effectively suppressing the possibility of starting the supply of the muscle force assisting force at an unintended position.
- step S11 When it is determined that the index related to the relative rotation around the assist axis (first rotation axis) d1 of the first wearing tool 20 and the second wearing tool 25 does not satisfy the start condition for a certain period ( For example, after a predetermined time has elapsed, it is determined again whether the relative position of the second mounting tool 25 with respect to the first mounting tool 20 is within a predetermined range (FIG. 11). Step S11). On the other hand, it is determined that the index related to the relative rotation around the assist axis (first rotation axis) d1 of the first wearing tool 20 and the second wearing tool 25 satisfies the start condition over a certain period. If it is performed (“Yes” in step S12 in FIG.
- the supply of the muscle strength assisting force is started (step S13 in FIG. 11).
- the actuator 31 is shortened, and the muscle force assisting apparatus 10 is switched from the free rotation mode (FIG. 7) to the rotation braking mode (FIG. 8).
- the rotation of the second wearing tool 25 in one direction around the first rotation axis (assist axis) d1 with respect to the first wearing tool 20 is restricted, and the wearer can prevent the upper arm from dropping.
- a muscle strength assisting force that supports the muscle strength is received from the muscle strength assisting device 10.
- muscle strength assistance by the muscle strength assisting device 10 is started when the release condition is satisfied.
- the sensor 80 that provides an index for determining whether or not the start condition is satisfied
- the posture sensor 81 and the abnormality detection sensor 82 are provided in the muscle force assisting device 10, even if the start condition is satisfied
- the muscle strength assistance may not be started. That is, when an abnormality is predicted from the detection results of the posture sensor 81 or the abnormality detection sensor 82, the muscle force assisting device 10 may be maintained in the free rotation mode so as not to restrain the wearer's movement. .
- an electromyograph or a photo reflector is used as the abnormality detection sensor 82, for example, it is possible to detect an abnormality such as a wearer of the muscle strength assisting device 10 continuously applying force to resist some force. .
- an optical sensor or a heat sensor is used as the abnormality detection sensor 82, it is possible to detect an abnormality in the surrounding environment, for example, the presence of a flame.
- a posture sensor or a gyro sensor is used as the abnormality detection sensor 82, it is possible to detect an abnormality such as the wearer's fall of the muscle force assisting apparatus 10.
- the distance sensor is used as the abnormality detection sensor 82, it is possible to detect a state in which the wearer is too close to the surrounding object.
- abnormality detection sensor 82 When a voltmeter or an ammeter is used as the abnormality detection sensor 82, it can be detected that there is a problem in the power supply state of the muscle strength assisting apparatus 10. When a pressure gauge is used as the abnormality detection sensor 82, it can be detected that there is a problem with the fluid source 32 of the muscle force assisting apparatus 10.
- the control unit 13 determines whether or not the muscle force assisting force should be released based on the information output from the sensor 80 (step S14 in FIG. 11).
- the release condition may be determined according to the work that the wearer intends to perform while wearing the muscular strength assisting device 10.
- the release condition is preferably a condition that reflects an action representing an intention display in which the wearer of the muscle strength assisting device 10 requests to cancel the strength assisting force.
- movement showing this intention display is distinguished from the other operation
- the control unit 13 in a state where the relative movement of the second mounting tool 25 in one direction with respect to the first mounting tool 20 is restricted, the control unit 13 is not limited to the second mounting tool 25 with respect to the first mounting tool 20. It may be determined whether or not an indicator related to the relative movement in the direction satisfies the release condition. Specifically, the relative displacement between the first wearing tool 20 and the second wearing tool 25 is greater than or equal to a predetermined value, or the relative speed between the first wearing tool 20 and the second wearing tool 25 is greater than or equal to a predetermined value.
- the relative acceleration of the first mounting tool 20 and the second mounting tool 25 being greater than or equal to a predetermined value, or the relative jerk of the first mounting tool 20 and the second mounting tool 25 Is greater than or equal to a predetermined value or exceeds a predetermined value, a combination of these conditions, or a combination of these conditions with other conditions can be used as the release condition.
- the second wearing tool 25 is unidirectionally centered on the first rotation axis d 1 with respect to the first wearing tool 20 (see FIG. 4 is restricted relative to the first mounting tool 20 in the other direction (counterclockwise direction in FIG. 4) around the first rotation axis d1 with respect to the first mounting tool 20. Relative rotation is allowed. Therefore, the wearer can perform an operation of lifting the upper arm against the urging force of the adjusting means 37 as an intention display for canceling the strength assisting force. Then, the release condition is satisfied unintentionally by setting the relative displacement detected by the sensor 80 to be a predetermined value or more or exceeding a predetermined value, thereby unintentionally canceling the muscle force assisting force. Can be effectively prevented.
- the controller 13 controls the second mounting tool 25 relative to the first mounting tool 20 in a state where relative movement of the second mounting tool 25 relative to the first mounting tool 20 in one direction is restricted. It may be determined whether or not an index related to a force that is intended to cause the relative movement in the other direction satisfies the release condition. Specifically, a translational force, a rotational force or the like that causes the second mounting tool 25 to move relative to the first mounting tool 20 in the other direction is greater than or equal to a predetermined value or exceeds the predetermined value. The myoelectric potential for moving the second mounting tool 25 relative to the tool 20 in the other direction is greater than or equal to a predetermined value or exceeds the predetermined value. An index indicating the degree of bulging of the muscle to be relatively moved in the direction is a predetermined value or more or exceeds a predetermined value, a combination of these conditions, or a combination of these conditions and other conditions as a release condition can do.
- the release condition By setting such an intentional movement as a release condition, that is, by setting a release condition that an index related to the force to be relatively moved is a predetermined value or more or exceeding a predetermined value, the release condition is unintentionally set. It is satisfied, thereby effectively preventing the assistance of the muscular strength from being released unintentionally.
- both the satisfaction of the index related to the relative motion in the first example and the satisfaction of the index related to the force for the relative motion in the second example may be set as the release condition. That is, the control unit 13 is configured such that the relative movement of the second mounting tool 25 relative to the first mounting tool 20 in the other direction is restricted in a state where the relative movement of the second mounting tool 25 relative to the first mounting tool 20 is restricted.
- both the index related to the movement and the index related to the force to move the second mounting tool 25 relative to the first mounting tool 20 in the other direction satisfy the predetermined release condition
- the restriction of the relative movement of the second wearing tool 25 in one direction with respect to the first wearing tool 20 may be released. According to such an example, it is possible to more effectively prevent an unintentional release of muscle strength assistance by unintentionally satisfying a release condition.
- control unit 13 performs the second mounting on the first mounting tool 20 in a state where the relative movement of the second mounting tool 25 in one direction with respect to the first mounting tool 20 is restricted. You may make it judge whether the parameter
- a translational force, a rotational force, or the like that attempts to move the second wearing tool 25 relative to the first wearing tool 20 in one direction is greater than or equal to a predetermined value
- the second mounting tool 25 is When the index indicating the degree of bulging of the muscle to be relatively moved in the direction is equal to or greater than a predetermined value or exceeds the predetermined value, the second wearing tool 25 is caused to move relative to the first wearing tool 20 in one direction.
- the release of the muscular strength assist enables the second wearing tool 25 to move relative to the first wearing tool 20 in one direction.
- the wearer of the muscle strength assisting device 10 needs to release the muscle strength assist when moving the second wearing tool 25 in the other direction with respect to the first wearing tool 20 and lowering the upper arm. Therefore, applying a force for causing the second wearing tool 25 to move relative to the first wearing tool 20 in one direction is an action directly linked to the intention of releasing the muscle strength assistance. Therefore, by setting such an intentional movement as a release condition, that is, an index related to a force for moving the second wearing tool 25 relative to the first wearing tool 20 in one direction is a predetermined value or more. By setting the condition that exceeds a predetermined value as the cancellation condition, it is possible to effectively prevent the cancellation condition from being unintentionally satisfied. Accordingly, it is possible to effectively prevent unintentional release of muscle strength assistance, and to accurately cancel muscle strength assistance when intended.
- the control unit 13 may change the cancellation condition determined in step S ⁇ b> 14 based on the detection result of the attitude sensor 81.
- the ease of operation of the wearer wearing the muscular strength assisting device 10 changes according to the posture. For example, moving an arm while standing is easier than moving an arm while squatting. Therefore, when it is determined from the detection result of the posture sensor 81 that the wearer is crouching, the release condition may be changed, specifically, the exemplified predetermined value may be reduced. In this case, it is possible to smoothly cancel the supply of the muscle force assisting force with the intended posture while effectively suppressing the possibility that the supply of the muscle force assisting force is released at an unintended position.
- step S14 in FIG. 11 If it is determined that the index output from the sensor 80 does not satisfy the release condition (“No” in step S14 in FIG. 11), for example, the index output from the sensor 80 after the fixed time has elapsed It is determined again whether or not the condition is satisfied (step S14 in FIG. 11). On the other hand, when it is determined that the index output from the sensor 80 satisfies the release condition (“Yes” in step S14 in FIG. 11), the supply of muscle strength assisting force is stopped (step S15 in FIG. 11). . As a specific operation, the actuator 31 is extended, and the muscle force assisting apparatus 10 is switched from the rotation braking mode (FIG. 8) to the free rotation mode (FIG. 7).
- the control unit 13 detects an abnormality in the abnormality detection sensor 82 in a state where the relative movement of the first wearing tool 20 in one direction with respect to the second wearing tool 25 is restricted. In this case, the restriction on the relative movement of the second wearing tool 25 in one direction with respect to the first wearing tool 20 may be released.
- an electromyograph or a photo reflector is used as the abnormality detection sensor 82, for example, it is possible to detect an abnormality such as a wearer of the muscle strength assisting device 10 continuously applying force to resist some force. .
- an optical sensor or a heat sensor is used as the abnormality detection sensor 82, it is possible to detect an abnormality in the surrounding environment, for example, the presence of a flame.
- the abnormality detection sensor 82 when a posture sensor or a gyro sensor is used as the abnormality detection sensor 82, it is possible to detect an abnormality such as the wearer's fall of the muscle force assisting apparatus 10.
- the distance sensor is used as the abnormality detection sensor 82, it is possible to detect a state in which the wearer is too close to the surrounding object.
- the control unit 13 stops supplying the muscle force assisting force. Thereby, the wearer of the muscular strength assisting device 10 can deal with the abnormality in a state where the restraint from the muscular strength assisting device 10 is released.
- an abnormality is discovered in the muscle force assisting device 10 and it is predicted from the detection result of the abnormality detecting sensor 82 that stable operation of the muscle force assisting device 10 cannot be expected, the supply of the muscle force assisting force is maintained. It may be preferable to do so. For example, when it is predicted from the detection result of the abnormality detection sensor 82 including a voltmeter, an ammeter, a pressure gauge, or the like that a sufficient power source or fluid pressure for driving the assist mechanism 15 of the muscle force assisting device 10 cannot be secured. It is.
- the abnormality detection sensor 82 detects such an abnormality, even if the release condition is satisfied, the restriction on the relative movement of the second wearing tool 25 with respect to the first wearing tool 20 may be maintained. That is, even if the release condition is satisfied, if the abnormality detection sensor 82 detects an abnormality, the muscle strength assistance from the assist mechanism 15 may be maintained.
- the control unit 13 determines that the index detected by the sensor 80 satisfies a predetermined condition over a certain period, one of the second mounting tools 25 with respect to the first mounting tool 20.
- the assist mechanism 15 is controlled so as to regulate the relative movement in the direction. That is, according to the present embodiment, in order to supply the muscle force assisting force from the assist mechanism 15, it is necessary to satisfy a predetermined condition over a certain period. Therefore, by setting the predetermined period to a sufficient length, it is possible to effectively prevent the supply of the muscle force assisting force from being started at an unintended position. Moreover, the desired posture which should receive a muscular strength assistance force can be taken in the state which has not received the restriction
- the sensor 80 includes the relative displacement between the first wearing tool 20 and the second wearing tool 25, the relative speed between the first wearing tool 20 and the second wearing tool 25, the first wearing tool 20 and the second wearing tool 25.
- the relative acceleration of the mounting tool 25 and one or more of the relative jerk of the first mounting tool 20 and the second mounting tool 25 are detected.
- the wearer can easily change the relative displacement, the relative speed, the relative acceleration, the relative jerk, and the like of the second wearing tool 25 with respect to the first wearing tool 20. Therefore, when a wearer wants to receive assistance of muscular strength, the intention display for starting muscular strength assistance can be performed easily. Thereby, supply of a muscular strength auxiliary force can be started with high accuracy at an intended position.
- the senor determines that the relative position of the second wearing tool 25 with respect to the first wearing tool 20 is within a predetermined range, and the index detected by the sensor 80 is predetermined over a predetermined period.
- the relative movement of the second wearing tool 25 in one direction with respect to the first wearing tool 20 is restricted.
- the muscular strength assistance is usually required when the relative position of the second wearing tool 25 with respect to the first wearing tool 20 is within a predetermined range. Accordingly, by setting the relative position of the second wearing tool 25 relative to the first wearing tool 20 within a predetermined range as a condition for starting muscle strength assistance, muscle strength assistance is started at an unintended position. Can be prevented more effectively.
- the muscle force assisting apparatus 10 further includes a posture sensor 81 that detects the posture of the muscle force assisting device 10. Then, the control unit 13 adjusts the predetermined range according to the detection result of the attitude sensor 81.
- the posture of the wearer who needs the muscular strength assist changes depending on the overall posture of the wearer. That is, the relative positions of the first wearing tool 20 and the second wearing tool 25 that require muscle strength assistance change according to the posture of the muscle strength assisting apparatus 10. Therefore, the predetermined range in which the second wearing tool 25 should be positioned with respect to the first wearing tool 20 as a condition for starting muscle strength assistance is determined in consideration of the posture of the muscle force assisting device 10 detected by the posture sensor 81. As a result, it is possible to more effectively prevent muscular power assistance from being started at an unintended position, and more reliably start the supply of muscular power assistance when intended.
- the muscle force assisting device 10 further includes a posture sensor that detects the posture of the muscle force assisting device 10. And the control part 13 adjusts at least one of the length of the period when the start condition and the start condition are satisfy
- FIG. 1 The ease of movement of the wearer in a posture requiring muscular strength assistance varies depending on the overall posture of the wearer. That is, the ease of relative movement of the first wearing tool 20 and the second wearing tool 25 in a state where muscle strength assistance is required varies depending on the posture of the muscle strength assisting apparatus 10.
- the condition of the relative strength of the first wearing tool 20 and the second wearing tool 25 as a condition for starting muscle strength assistance and the length of the period in which the condition should be satisfied are detected by the posture sensor 81.
- the posture sensor 81 By determining the position in consideration of the posture, it is possible to more effectively prevent the start of the muscle strength assistance at an unintended position, and it is possible to more reliably start the muscle strength assistance when intended. .
- the wearer of the muscle strength assisting apparatus 10 falls or the like, the supply of the muscle strength assisting force can be prevented from being started.
- the control unit 13 performs the second operation on the first wearing device 20 in a state where the relative movement of the second wearing device 25 in one direction with respect to the first wearing device 20 is restricted.
- the second mounting tool 25 tries to move in the other direction relative to the first mounting tool 20 and the index related to the relative movement in the other direction which is opposite to the one direction of the mounting tool 25.
- the restriction on the relative movement of the first wearing tool 20 in one direction with respect to the first wearing tool 20 is released.
- the index is related to the movement in the direction opposite to the direction in which the movement is restricted by the muscle force assist, and the direction in which the movement is regulated in the opposite direction from the direction in which the movement is restricted by the muscle strength assistance.
- the muscle strength assistance is released.
- an operation opposite to the direction in which the operation is restricted by the strength assisting force or a force for performing the operation is normally generated unless the wearer of the strength assisting device intends. Absent. Therefore, by canceling the muscular power assist based on such an operation or a force for performing the operation, it is possible to effectively prevent the muscular power assist from being released unintentionally.
- the control unit 13 controls the first wearing tool 20 with respect to the first wearing tool 20 in a state where relative movement of the second wearing tool 25 in one direction with respect to the first wearing tool 20 is restricted.
- the index related to the force to move the second wearing tool 25 relative to one direction satisfies the predetermined release condition
- the second wearing tool 25 moves toward one direction with respect to the first wearing tool 20. Release the restriction of relative movement. That is, according to the present embodiment, it is related to an index related to a force for performing an operation regulated by muscle strength assistance, in other words, related to a force for performing an operation that can be performed by releasing the regulation by the muscle strength assistance force.
- the muscle strength assistance is released when the index that has been fulfilled the predetermined release condition.
- the release condition is a condition related to the force for performing the operation to be performed after releasing the restriction by the muscle force assist, and in other words, for performing a very direct operation for releasing the muscle force assist. It can be said that it is a condition regarding power. Therefore, by canceling the muscular power assistance based on the force for performing such an operation, it is possible to effectively prevent the muscular power assistance from being released unintentionally.
- the predetermined release condition is that a force to move the second mounting tool 25 relative to the first mounting tool 20 in one direction is a second mounting tool with respect to the first mounting tool 20. It is assumed that the force is greater than the force that restricts the relative movement in one direction. That is, when a force larger than the force that holds the second wearing tool 25 in a fixed position with respect to the first wearing tool 20 is detected, the muscle strength assistance is released. In order to satisfy such a condition, a large force that intentionally resists the strength assisting force is applied. Therefore, it is possible to more effectively prevent the muscle strength assistance from being released unintentionally.
- the sensor 80 includes the relative displacement of the first mounting tool 20 and the second mounting tool 25, the relative speed of the first mounting tool 20 and the second mounting tool 25, the first mounting tool 20 and the second mounting tool 25.
- One or more of the relative acceleration of the wearing tool 25, the relative jerk of the first wearing tool 20 and the second wearing tool 25, the myoelectric potential of the wearer, and the degree of bulging of the wearer's muscle are detected.
- the wearer can easily change the relative displacement, the relative speed, the relative acceleration, the relative jerk, the myoelectric potential, the degree of bulging, and the like of the second wearing tool 25 with respect to the first wearing tool 20. Therefore, when a wearer wants to stop supply of muscular strength assistance, the intention display for canceling muscular strength assistance can be performed easily. Thereby, when intended, muscular strength assistance can be canceled more reliably.
- the muscle force assisting apparatus 10 further includes a posture sensor 81 that detects the posture of the muscle force assisting device 10. Then, the control unit 13 adjusts a predetermined release condition according to the detection result of the attitude sensor 81.
- the ease of operation of the wearer of the muscle force assisting device 10 and the ease of applying a force for performing the operation vary depending on the overall posture of the wearer. Therefore, the condition of the relative strength of the first mounting tool 20 and the second mounting tool 25 and the condition of the force for performing the relative motion as the conditions for releasing the muscle strength assist of the muscle strength assisting apparatus 10 detected by the posture sensor 81 are described.
- the muscle force assisting apparatus 10 further includes an abnormality detection sensor 82 for detecting an abnormality.
- the abnormality detection sensor 82 detects an abnormality in a state where the relative movement of the second wearing tool 25 in one direction with respect to the first wearing tool 20 is restricted
- the control unit 13 detects the first wearing tool 20.
- movement to the one direction of the 2nd mounting tool 25 with respect to is cancelled
- a strength assisting device 10 for example, when an abnormality occurs in the strength assisting device 10, when an abnormality occurs in the wearer of the strength assisting device 10, or when an abnormality occurs around the strength assisting device 10 For example, the supply of muscle strength assistance can be canceled. That is, it is possible to effectively avoid the restriction of the free movement of the wearer with the assistance of the muscular strength at the time of abnormality.
- the abnormality detection sensor 82 includes an electromyograph that detects the wearer's myoelectric potential, a photo reflector that detects the degree of the wearer's muscle elevation, a light sensor that detects brightness, and heat. It includes one or more of a thermal sensor for detecting, a posture sensor for detecting posture, and a distance sensor for detecting a distance from surrounding objects.
- An abnormality of the wearer can be detected with an electromyograph or a photo reflector, and an abnormality of the surrounding environment can be detected with an optical sensor or a thermal sensor.
- the posture sensor and the distance sensor it is possible to detect an abnormality related to the posture of the wearer, the position of the wearer, and the like. According to such an abnormality detection sensor 82, it is possible to detect an abnormal state in which a wearer's free movement should not be restricted by assisting muscle strength.
- the configuration of the muscle force assisting apparatus 10 has been described, but the configuration is not limited thereto. Even when the control unit 13 controls a muscle force assisting device having a configuration different from that of the above-described muscle force assisting device, the same function and effect as those described above can be enjoyed.
- 12 to 14 show a modified example of the muscle strength assisting apparatus 10.
- the switching means 40 is disposed on the outer side of the output shaft member 76 and the shoulder joint.
- the assist mechanism 15 is not capable of rotating relative to the switching means 40 having the first member 41 and the second member 46 and the first member 41 of the switching means 40.
- the first member 41 is rotatable about a first rotation axis (assist axis) d1.
- the second member 46 can swing about a swing axis parallel to the first rotation axis d1.
- the actuator 31 and the adjusting unit 37 connected to the second member 46 are disposed together with the switching unit 40 on a plane orthogonal to the first rotation axis d1.
- the second member 46 constitutes the band brake mechanism 39 together with the first member 41, and the swinging members 47 a and 47 b of the second member 46 are arranged in the radial direction with respect to the rotary drum 42 constituting the first member 41.
- the rotating drum 42 is formed in a cylinder shape,
- positioned inside the rotating drum 42 is the radial direction inner side to the rotating drum 42.
- the relative rotation between the first member 41 and the second member 46 may be restricted by abutting.
- the switching means 40 may be configured as a disc brake mechanism.
- the second member 46 may abut on the first member 41 formed in a disc shape from a direction parallel to the rotation axis of the first member 41. In this example, when the second member 46 abuts on the first member 41, the relative movement of the second mounting tool 25 with respect to the first mounting tool 20 is restricted.
- the switching means 40 may be configured as a ratchet mechanism.
- ratchet teeth may be formed on the outer peripheral surface of the first member 41, and a claw member forming the second member 46 may come into contact with or separate from the first member from the outside in the radial direction.
- the claw engages with the ratchet teeth, the relative rotation of the first member 41 and the second member 46 in one direction is restricted, and the first You may make it the relative rotation to the other direction of the member 41 and the 2nd member 46 is accept
- first wearing tool 20 and the second wearing tool 25 are configured to be rotatable relative to each other about the assist axis d1 is shown, but the present invention is not limited to this example.
- the relative motion of the first mounting tool 20 and the second mounting tool 25 is not particularly limited, and may be a linear motion, for example.
Abstract
A muscle-power assistance device (10) that has: a first mounting fixture (20); a second mounting fixture that can rotate relative to the first mounting fixture (20) around an assist shaft line (d1); a sensor (80); and a control unit (13). When the rotation of the second mounting fixture relative to the first mounting fixture in one direction is restricted, if it is determined that an indicator that is related to the rotation of the second mounting fixture relative to the first mounting fixture in another direction that is opposite the one direction and/or an indicator that is related to force that would make the second mounting fixture rotate relative to the first mounting fixture in the other direction satisfies prescribed release conditions, the control unit controls an assist mechanism such that the restriction of the rotation of the second mounting fixture relative to the first mounting fixture in the one direction is released.
Description
本発明は、着用者に着用されて着用者の筋力を補助する筋力補助装置に関する。
The present invention relates to a muscle strength assisting device that is worn by a wearer and assists the muscle strength of the wearer.
例えば特許文献1(JP2014-33780A)に開示されているように、農業、建設業、介護等に従事する作業者の筋力的な負担を軽減することを目的として、筋力補助装置が注目を集めている。筋力補助装置は、関節が間に位置する人体の二つの部位にそれぞれ取り付けられる一対の装着具を有し、一対の装着具を所定の相対位置に保持することを可能にしている。とりわけ、特許文献1の筋力補助装置では、ラチェット機構を用いて、上腕を持ち上げた状態に維持することを補助する。また、ラチェット機構による上腕保持は、スイッチによりソレノイドを作動させることで、解除され得る。スイッチは、筋力補助力を受けている上腕に対して前腕を曲げることで押すことができる。
For example, as disclosed in Patent Document 1 (JP2014-33780A), a muscle force assisting device has attracted attention for the purpose of reducing the muscular burden on workers engaged in agriculture, construction industry, nursing care, etc. Yes. The muscular strength assisting device has a pair of attachments that are respectively attached to two parts of a human body with a joint positioned therebetween, and can hold the pair of attachments in a predetermined relative position. In particular, the muscle force assisting device of Patent Document 1 uses a ratchet mechanism to assist in maintaining the upper arm in a lifted state. Moreover, the upper arm holding | maintenance by a ratchet mechanism can be cancelled | released by operating a solenoid with a switch. The switch can be pushed by bending the forearm with respect to the upper arm receiving the strength assisting force.
しかしながら、筋力補助装置の着用者は、上腕に筋力補助力を受けながら、前腕を用いて所定の作業をすることになる。したがって、筋力補助力の解除が、筋力補助力を受けている上腕の動作ではなく、上腕に繋がった前腕の動作で行うようになっていると、作業中の前腕が、意図せずに解除スイッチを押してしまうことも十分に想定される。
However, the wearer of the muscle strength assisting device performs a predetermined work using the forearm while receiving the strength assisting force on the upper arm. Therefore, if the force assisting force is released not by the upper arm receiving the strength assisting force but by the forearm connected to the upper arm, the forearm in operation will unintentionally release the release switch. It is also assumed that you will press.
本発明は、このような点を考慮してなされたものであり、筋力補助装置において、意図せずに筋力補助が解除されることを効果的に防止することを目的とする。
The present invention has been made in consideration of such points, and an object thereof is to effectively prevent unintentional release of muscle force assist in a muscle force assist device.
本発明による第1の筋力補助装置は、
人体の二つの部位のうちの一方に取り付けられる第1装着具と、
アシスト軸線を中心として前記第1装着具に対して相対回転可能であり、前記二つの部位のうちの他方に取り付けられる第2装着具と、
前記第1装着具に対する前記第2装着具の前記アシスト軸線を中心とした少なくとも一方向への相対回転を規制可能なアシスト機構と、
前記第1装着具及び前記第2装着具の前記アシスト軸線を中心とする相対回転に関した指標、並びに、前記第1装着具及び前記第2装着具を相対回転させようとする力に関連した指標の少なくとも一方を得るためのセンサと、
前記アシスト機構を制御する制御部と、を備え、
前記制御部は、前記第1装着具に対する前記第2装着具の前記一方向への相対回転が規制されている状態において、前記第1装着具に対する前記第2装着具の前記一方向とは逆方向となる他方向への相対回転に関連した指標および前記第1装着具に対して前記第2装着具を前記他方向へ相対回転させようとする力に関連した指標の少なくとも一方が所定の解除条件を満たすと判断した場合、前記第1装着具に対する前記第2装着具の前記一方向への相対回転の規制を解除するよう、前記アシスト機構を制御する。 A first muscle strength assisting device according to the present invention includes:
A first wearing tool attached to one of the two parts of the human body;
A second wearing tool that is rotatable relative to the first wearing tool about an assist axis, and is attached to the other of the two parts;
An assist mechanism capable of restricting relative rotation in at least one direction around the assist axis of the second wearing tool with respect to the first wearing tool;
An index related to relative rotation of the first wearing tool and the second wearing tool about the assist axis, and an index related to a force for relatively rotating the first wearing tool and the second wearing tool. A sensor for obtaining at least one of
A control unit for controlling the assist mechanism,
The control unit is opposite to the one direction of the second mounting tool relative to the first mounting tool in a state where relative rotation of the second mounting tool relative to the first mounting tool in the one direction is restricted. At least one of an index related to relative rotation in the other direction as a direction and an index related to a force for relatively rotating the second mounting tool in the other direction with respect to the first mounting tool is predetermined release When it is determined that the condition is satisfied, the assist mechanism is controlled so as to release the restriction on the relative rotation of the second wearing tool in the one direction with respect to the first wearing tool.
人体の二つの部位のうちの一方に取り付けられる第1装着具と、
アシスト軸線を中心として前記第1装着具に対して相対回転可能であり、前記二つの部位のうちの他方に取り付けられる第2装着具と、
前記第1装着具に対する前記第2装着具の前記アシスト軸線を中心とした少なくとも一方向への相対回転を規制可能なアシスト機構と、
前記第1装着具及び前記第2装着具の前記アシスト軸線を中心とする相対回転に関した指標、並びに、前記第1装着具及び前記第2装着具を相対回転させようとする力に関連した指標の少なくとも一方を得るためのセンサと、
前記アシスト機構を制御する制御部と、を備え、
前記制御部は、前記第1装着具に対する前記第2装着具の前記一方向への相対回転が規制されている状態において、前記第1装着具に対する前記第2装着具の前記一方向とは逆方向となる他方向への相対回転に関連した指標および前記第1装着具に対して前記第2装着具を前記他方向へ相対回転させようとする力に関連した指標の少なくとも一方が所定の解除条件を満たすと判断した場合、前記第1装着具に対する前記第2装着具の前記一方向への相対回転の規制を解除するよう、前記アシスト機構を制御する。 A first muscle strength assisting device according to the present invention includes:
A first wearing tool attached to one of the two parts of the human body;
A second wearing tool that is rotatable relative to the first wearing tool about an assist axis, and is attached to the other of the two parts;
An assist mechanism capable of restricting relative rotation in at least one direction around the assist axis of the second wearing tool with respect to the first wearing tool;
An index related to relative rotation of the first wearing tool and the second wearing tool about the assist axis, and an index related to a force for relatively rotating the first wearing tool and the second wearing tool. A sensor for obtaining at least one of
A control unit for controlling the assist mechanism,
The control unit is opposite to the one direction of the second mounting tool relative to the first mounting tool in a state where relative rotation of the second mounting tool relative to the first mounting tool in the one direction is restricted. At least one of an index related to relative rotation in the other direction as a direction and an index related to a force for relatively rotating the second mounting tool in the other direction with respect to the first mounting tool is predetermined release When it is determined that the condition is satisfied, the assist mechanism is controlled so as to release the restriction on the relative rotation of the second wearing tool in the one direction with respect to the first wearing tool.
本発明による第2の筋力補助装置は、
人体の二つの部位のうちの一方に取り付けられる第1装着具と、
アシスト軸線を中心として前記第1装着具に対して相対回転可能であり、前記二つの部位のうちの他方に取り付けられる第2装着具と、
前記第1装着具に対する前記第2装着具の前記アシスト軸線を中心とした少なくとも一方向への相対回転を規制可能なアシスト機構と、
前記第1装着具及び前記第2装着具を相対回転させようとする力に関連した指標を得るためのセンサと、
前記アシスト機構を制御する制御部と、を備え、
前記制御部は、前記第1装着具に対する前記第2装着具の前記一方向への相対回転が規制されている状態において、前記第1装着具に対して前記第2装着具を前記一方向へ相対回転させようとする力に関連した指標が所定の解除条件を満たすと判断した場合、前記第1装着具に対する前記第2装着具の前記一方向への相対回転の規制を解除するよう、前記アシスト機構を制御する。 The second muscle force assisting device according to the present invention comprises:
A first wearing tool attached to one of the two parts of the human body;
A second wearing tool that is rotatable relative to the first wearing tool about an assist axis, and is attached to the other of the two parts;
An assist mechanism capable of restricting relative rotation in at least one direction around the assist axis of the second wearing tool with respect to the first wearing tool;
A sensor for obtaining an index related to a force to relatively rotate the first wearing tool and the second wearing tool;
A control unit for controlling the assist mechanism,
The controller is configured to move the second wearing tool in the one direction relative to the first wearing tool in a state where relative rotation of the second wearing tool in the one direction with respect to the first wearing tool is restricted. When it is determined that the index related to the force to be relatively rotated satisfies a predetermined release condition, the restriction on the relative rotation of the second wearing tool in the one direction with respect to the first wearing tool is released. Control the assist mechanism.
人体の二つの部位のうちの一方に取り付けられる第1装着具と、
アシスト軸線を中心として前記第1装着具に対して相対回転可能であり、前記二つの部位のうちの他方に取り付けられる第2装着具と、
前記第1装着具に対する前記第2装着具の前記アシスト軸線を中心とした少なくとも一方向への相対回転を規制可能なアシスト機構と、
前記第1装着具及び前記第2装着具を相対回転させようとする力に関連した指標を得るためのセンサと、
前記アシスト機構を制御する制御部と、を備え、
前記制御部は、前記第1装着具に対する前記第2装着具の前記一方向への相対回転が規制されている状態において、前記第1装着具に対して前記第2装着具を前記一方向へ相対回転させようとする力に関連した指標が所定の解除条件を満たすと判断した場合、前記第1装着具に対する前記第2装着具の前記一方向への相対回転の規制を解除するよう、前記アシスト機構を制御する。 The second muscle force assisting device according to the present invention comprises:
A first wearing tool attached to one of the two parts of the human body;
A second wearing tool that is rotatable relative to the first wearing tool about an assist axis, and is attached to the other of the two parts;
An assist mechanism capable of restricting relative rotation in at least one direction around the assist axis of the second wearing tool with respect to the first wearing tool;
A sensor for obtaining an index related to a force to relatively rotate the first wearing tool and the second wearing tool;
A control unit for controlling the assist mechanism,
The controller is configured to move the second wearing tool in the one direction relative to the first wearing tool in a state where relative rotation of the second wearing tool in the one direction with respect to the first wearing tool is restricted. When it is determined that the index related to the force to be relatively rotated satisfies a predetermined release condition, the restriction on the relative rotation of the second wearing tool in the one direction with respect to the first wearing tool is released. Control the assist mechanism.
本発明による第1又は第2の筋力補助装置において、前記制御部は、前記第1装着具に対する前記第2装着具の前記一方向への相対回転が規制されている状態において、前記第1装着具に対する前記第2装着具の前記一方向とは逆方向となる他方向への相対回転に関連した指標および前記第1装着具に対して前記第2装着具を相対回転させようとする力に関連した指標の少なくとも一方が所定の解除条件を満たすと判断した場合、前記第1装着具に対する前記第2装着具の前記一方向への相対回転の規制を解除するよう、前記アシスト機構を制御するようにしてもよい。
In the first or second muscular strength assisting device according to the present invention, the control unit may be configured such that the relative rotation of the second wearing tool relative to the first wearing tool in the one direction is restricted. An index related to relative rotation of the second mounting tool relative to the tool in the other direction opposite to the one direction, and a force to rotate the second mounting tool relative to the first mounting tool. If it is determined that at least one of the related indices satisfies a predetermined release condition, the assist mechanism is controlled so as to release the restriction on the relative rotation of the second wearing tool in the one direction with respect to the first wearing tool. You may do it.
本発明による第1又は第2の筋力補助装置において、前記所定の解除条件は、前記第1装着具に対して前記第2装着具を前記一方向へ相対回転させようとする力が前記第1装着具に対する前記第2装着具の前記一方向への相対回転を規制する力よりも大きくなること、であってもよい。
In the first or second muscular strength assisting device according to the present invention, the predetermined release condition is that a force for rotating the second wearing tool relative to the first wearing tool in the one direction is the first. It may be greater than the force that restricts relative rotation of the second mounting tool in the one direction with respect to the mounting tool.
本発明による第1又は第2の筋力補助装置において、前記指標は、前記第1装着具および前記第2装着具の相対変位、前記第1装着具および前記第2装着具の相対速度、前記第1装着具および前記第2装着具の相対加速度、前記第1装着具および前記第2装着具の相対ジャーク、着用者の筋電位、及び、着用者の筋肉の隆起度合いの一以上を含むようにしてもよい。
In the first or second muscle force assisting device according to the present invention, the indicator is a relative displacement between the first wearing tool and the second wearing tool, a relative speed between the first wearing tool and the second wearing tool, and the first. It may be configured to include one or more of the relative acceleration of the first wearing tool and the second wearing tool, the relative jerk of the first wearing tool and the second wearing tool, the myoelectric potential of the wearer, and the degree of bulging of the wearer's muscle. Good.
本発明による第1又は第2の筋力補助装置は、
筋力補助装置の姿勢を検出する姿勢センサをさらに備え、
前記制御部は、前記姿勢センサの検出結果に応じて前記所定の解除条件を調整するようにしてもよい。 The first or second muscle force assisting device according to the present invention comprises:
A posture sensor for detecting the posture of the muscle force assisting device;
The control unit may adjust the predetermined release condition according to a detection result of the attitude sensor.
筋力補助装置の姿勢を検出する姿勢センサをさらに備え、
前記制御部は、前記姿勢センサの検出結果に応じて前記所定の解除条件を調整するようにしてもよい。 The first or second muscle force assisting device according to the present invention comprises:
A posture sensor for detecting the posture of the muscle force assisting device;
The control unit may adjust the predetermined release condition according to a detection result of the attitude sensor.
本発明による第1又は第2の筋力補助装置は、
異常を検出する異常検出センサをさらに備え、
前記制御部は、前記第1装着具に対する前記第2装着具の前記一方向への相対回転が規制されている状態において、前記異常検出センサが異常を検出した場合、前記第1装着具に対する前記第2装着具の前記一方向への相対回転の規制を解除するよう、前記アシスト機構を制御してもよい。 The first or second muscle force assisting device according to the present invention comprises:
It further includes an abnormality detection sensor for detecting an abnormality,
When the abnormality detection sensor detects an abnormality in a state where relative rotation of the second wearing tool in the one direction with respect to the first wearing tool is restricted, the control unit detects the abnormality with respect to the first wearing tool. You may control the said assist mechanism so that the restriction | limiting of the relative rotation to the said one direction of a 2nd mounting tool may be cancelled | released.
異常を検出する異常検出センサをさらに備え、
前記制御部は、前記第1装着具に対する前記第2装着具の前記一方向への相対回転が規制されている状態において、前記異常検出センサが異常を検出した場合、前記第1装着具に対する前記第2装着具の前記一方向への相対回転の規制を解除するよう、前記アシスト機構を制御してもよい。 The first or second muscle force assisting device according to the present invention comprises:
It further includes an abnormality detection sensor for detecting an abnormality,
When the abnormality detection sensor detects an abnormality in a state where relative rotation of the second wearing tool in the one direction with respect to the first wearing tool is restricted, the control unit detects the abnormality with respect to the first wearing tool. You may control the said assist mechanism so that the restriction | limiting of the relative rotation to the said one direction of a 2nd mounting tool may be cancelled | released.
本発明による第1又は第2の筋力補助装置は、
異常を検出する異常検出センサをさらに備え、
前記制御部は、前記第1装着具に対する前記第2装着具の前記一方向への相対回転が規制されている状態において、前記異常検出センサが異常を検出した場合、前記解除条件が満されたと判断しても、前記第1装着具に対する前記第2装着具の前記一方向への相対回転の規制を維持するよう、前記アシスト機構を制御するようにしてもよい。 The first or second muscle force assisting device according to the present invention comprises:
It further includes an abnormality detection sensor for detecting an abnormality,
In the state where the relative rotation of the second wearing tool in the one direction with respect to the first wearing tool is restricted, the control unit determines that the release condition is satisfied when the abnormality detecting sensor detects an abnormality. Even if it judges, you may make it control the said assist mechanism so that the restriction | limiting of the relative rotation to the said one direction of the said 2nd mounting tool with respect to the said 1st mounting tool may be maintained.
異常を検出する異常検出センサをさらに備え、
前記制御部は、前記第1装着具に対する前記第2装着具の前記一方向への相対回転が規制されている状態において、前記異常検出センサが異常を検出した場合、前記解除条件が満されたと判断しても、前記第1装着具に対する前記第2装着具の前記一方向への相対回転の規制を維持するよう、前記アシスト機構を制御するようにしてもよい。 The first or second muscle force assisting device according to the present invention comprises:
It further includes an abnormality detection sensor for detecting an abnormality,
In the state where the relative rotation of the second wearing tool in the one direction with respect to the first wearing tool is restricted, the control unit determines that the release condition is satisfied when the abnormality detecting sensor detects an abnormality. Even if it judges, you may make it control the said assist mechanism so that the restriction | limiting of the relative rotation to the said one direction of the said 2nd mounting tool with respect to the said 1st mounting tool may be maintained.
本発明による第1又は第2の筋力補助装置において、前記異常検出センサは、着用者の筋電位を検出する筋電計、着用者の筋肉の隆起の度合いを検出するフォトリフレクタ、明るさを検出する光センサ、熱を検出する熱センサ、姿勢を検出する姿勢センサ、及び、周囲物との距離を検出する距離センサの一以上を含むようにしてもよい。
In the first or second muscle force assisting device according to the present invention, the abnormality detection sensor includes an electromyograph that detects a wearer's myoelectric potential, a photoreflector that detects the degree of the wearer's muscle bump, and a brightness detection One or more of an optical sensor that detects heat, a thermal sensor that detects heat, an attitude sensor that detects an attitude, and a distance sensor that detects a distance to a surrounding object may be included.
本発明による第3の筋力補助装置は、
人体の二つの部位のうちの一方に取り付けられる第1装着具と、
前記第1装着具に対して相対動作可能であり、前記二つの部位のうちの他方に取り付けられる第2装着具と、
前記第1装着具に対する前記第2装着具の少なくとも一の向きへの前記相対動作を規制可能なアシスト機構と、
前記第1装着具及び前記第2装着具の相対動作に関連した指標、並びに、前記第1装着具及び前記第2装着具を相対動作させようとする力に関連した指標の少なくとも一方を得るためのセンサと、
前記アシスト機構を制御する制御部と、を備え、
前記制御部は、前記第1装着具に対する前記第2装着具の前記一の向きへの相対動作が規制されている状態において、前記第1装着具に対する前記第2装着具の前記一の向きとは逆向きとなる他の向きへの相対動作に関連した指標および前記第1装着具に対して前記第2装着具を前記他の向きへ相対動作させようとする力に関連した指標の少なくとも一方が所定の解除条件を満たすと判断した場合、前記第1装着具に対する前記第2装着具の前記一の向きへの相対動作の規制を解除するよう、前記アシスト機構を制御する。 A third muscle strength assisting device according to the present invention comprises:
A first wearing tool attached to one of the two parts of the human body;
A second mounting tool operable relative to the first mounting tool and attached to the other of the two parts;
An assist mechanism capable of restricting the relative movement of the second wearing tool in at least one direction with respect to the first wearing tool;
To obtain at least one of an index related to the relative motion of the first mounting tool and the second mounting tool, and an index related to a force for causing the first mounting tool and the second mounting tool to move relative to each other. With sensors,
A control unit for controlling the assist mechanism,
In the state where the relative movement of the second wearing tool relative to the first wearing tool in the one direction is restricted, the control unit is configured to change the one direction of the second wearing tool relative to the first wearing tool. Is at least one of an indicator related to relative movement in another direction that is opposite and an index related to a force that causes the second wearing device to move relative to the first wearing device relative to the other direction. Is determined to satisfy a predetermined release condition, the assist mechanism is controlled so as to release the restriction of the relative movement of the second wearing tool in the one direction with respect to the first wearing tool.
人体の二つの部位のうちの一方に取り付けられる第1装着具と、
前記第1装着具に対して相対動作可能であり、前記二つの部位のうちの他方に取り付けられる第2装着具と、
前記第1装着具に対する前記第2装着具の少なくとも一の向きへの前記相対動作を規制可能なアシスト機構と、
前記第1装着具及び前記第2装着具の相対動作に関連した指標、並びに、前記第1装着具及び前記第2装着具を相対動作させようとする力に関連した指標の少なくとも一方を得るためのセンサと、
前記アシスト機構を制御する制御部と、を備え、
前記制御部は、前記第1装着具に対する前記第2装着具の前記一の向きへの相対動作が規制されている状態において、前記第1装着具に対する前記第2装着具の前記一の向きとは逆向きとなる他の向きへの相対動作に関連した指標および前記第1装着具に対して前記第2装着具を前記他の向きへ相対動作させようとする力に関連した指標の少なくとも一方が所定の解除条件を満たすと判断した場合、前記第1装着具に対する前記第2装着具の前記一の向きへの相対動作の規制を解除するよう、前記アシスト機構を制御する。 A third muscle strength assisting device according to the present invention comprises:
A first wearing tool attached to one of the two parts of the human body;
A second mounting tool operable relative to the first mounting tool and attached to the other of the two parts;
An assist mechanism capable of restricting the relative movement of the second wearing tool in at least one direction with respect to the first wearing tool;
To obtain at least one of an index related to the relative motion of the first mounting tool and the second mounting tool, and an index related to a force for causing the first mounting tool and the second mounting tool to move relative to each other. With sensors,
A control unit for controlling the assist mechanism,
In the state where the relative movement of the second wearing tool relative to the first wearing tool in the one direction is restricted, the control unit is configured to change the one direction of the second wearing tool relative to the first wearing tool. Is at least one of an indicator related to relative movement in another direction that is opposite and an index related to a force that causes the second wearing device to move relative to the first wearing device relative to the other direction. Is determined to satisfy a predetermined release condition, the assist mechanism is controlled so as to release the restriction of the relative movement of the second wearing tool in the one direction with respect to the first wearing tool.
本発明による第4の筋力補助装置は、
人体の二つの部位のうちの一方に取り付けられる第1装着具と、
前記第1装着具に対して相対動作可能であり、前記二つの部位のうちの他方に取り付けられる第2装着具と、
前記第1装着具に対する前記第2装着具の少なくとも一の向きへの前記相対動作を規制可能なアシスト機構と、
前記第1装着具及び前記第2装着具を相対動作させようとする力を得るためのセンサと、
前記アシスト機構を制御する制御部と、を備え、
前記制御部は、前記第1装着具に対する前記第2装着具の前記一の向きへの相対動作が規制されている状態において、前記第1装着具に対して前記第2装着具を前記一の向きへ相対動作させようとする力に関連した指標が所定の解除条件を満たすと判断した場合、前記第1装着具に対する前記第2装着具の前記一の向きへの相対動作の規制を解除するよう、前記アシスト機構を制御する。 A fourth muscle strength assisting device according to the present invention is as follows.
A first wearing tool attached to one of the two parts of the human body;
A second mounting tool operable relative to the first mounting tool and attached to the other of the two parts;
An assist mechanism capable of restricting the relative movement of the second wearing tool in at least one direction with respect to the first wearing tool;
A sensor for obtaining a force to relatively move the first wearing tool and the second wearing tool;
A control unit for controlling the assist mechanism,
In the state where the relative movement of the second wearing tool in the one direction with respect to the first wearing tool is restricted, the control unit moves the second wearing tool with respect to the first wearing tool. When it is determined that the index related to the force to be moved relative to the direction satisfies a predetermined release condition, the restriction on the relative movement of the second wearing tool relative to the first wearing tool with respect to the first wearing tool is released. The assist mechanism is controlled.
人体の二つの部位のうちの一方に取り付けられる第1装着具と、
前記第1装着具に対して相対動作可能であり、前記二つの部位のうちの他方に取り付けられる第2装着具と、
前記第1装着具に対する前記第2装着具の少なくとも一の向きへの前記相対動作を規制可能なアシスト機構と、
前記第1装着具及び前記第2装着具を相対動作させようとする力を得るためのセンサと、
前記アシスト機構を制御する制御部と、を備え、
前記制御部は、前記第1装着具に対する前記第2装着具の前記一の向きへの相対動作が規制されている状態において、前記第1装着具に対して前記第2装着具を前記一の向きへ相対動作させようとする力に関連した指標が所定の解除条件を満たすと判断した場合、前記第1装着具に対する前記第2装着具の前記一の向きへの相対動作の規制を解除するよう、前記アシスト機構を制御する。 A fourth muscle strength assisting device according to the present invention is as follows.
A first wearing tool attached to one of the two parts of the human body;
A second mounting tool operable relative to the first mounting tool and attached to the other of the two parts;
An assist mechanism capable of restricting the relative movement of the second wearing tool in at least one direction with respect to the first wearing tool;
A sensor for obtaining a force to relatively move the first wearing tool and the second wearing tool;
A control unit for controlling the assist mechanism,
In the state where the relative movement of the second wearing tool in the one direction with respect to the first wearing tool is restricted, the control unit moves the second wearing tool with respect to the first wearing tool. When it is determined that the index related to the force to be moved relative to the direction satisfies a predetermined release condition, the restriction on the relative movement of the second wearing tool relative to the first wearing tool with respect to the first wearing tool is released. The assist mechanism is controlled.
本発明による第3又は第4の筋力補助装置において、前記制御部は、前記第1装着具に対する前記第2装着具の前記一の向きへの相対動作が規制されている状態において、前記第1装着具に対する前記第2装着具の前記一の向きとは逆向きとなる他の向きへの相対動作に関連した指標および前記第1装着具に対して前記第2装着具を相対動作させようとする力に関連した指標の少なくとも一方が所定の解除条件を満たすと判断した場合、前記第1装着具に対する前記第2装着具の前記一の向きへの相対動作の規制を解除するよう、前記アシスト機構を制御するようにしてもよい。
In the third or fourth muscle force assisting device according to the present invention, the control unit may be configured such that the relative movement of the second wearing tool relative to the first wearing tool in the one direction is restricted. An attempt is made to move the second wearing tool relative to the first wearing tool and an index related to the relative movement of the second wearing tool relative to the other direction opposite to the one direction with respect to the wearing tool. The assist so as to release the restriction of the relative movement of the second wearing tool in the one direction with respect to the first wearing tool when it is determined that at least one of the indices related to the force to be applied satisfies a predetermined release condition. The mechanism may be controlled.
本発明による第3又は第4の筋力補助装置において、前記所定の解除条件は、前記第1装着具に対して前記第2装着具を前記一の向きへ相対動作させようとする力が前記第1装着具に対する前記第2装着具の前記一の向きへの相対動作を規制する力よりも大きくなること、であってもよい。
In the third or fourth muscle force assisting device according to the present invention, the predetermined release condition is that the force for moving the second wearing tool relative to the first wearing tool in the one direction is the first. It may be greater than the force that regulates the relative movement of the second wearing tool in the one direction with respect to the one wearing tool.
本発明による第3又は第4の筋力補助装置において、前記指標は、前記第1装着具および前記第2装着具の相対変位、前記第1装着具および前記第2装着具の相対速度、前記第1装着具および前記第2装着具の相対加速度、前記第1装着具および前記第2装着具の相対ジャーク、着用者の筋電位、及び、着用者の筋肉の隆起度合いの一以上を含むようにしてもよい。
In the third or fourth muscle force assisting device according to the present invention, the indicator is a relative displacement of the first wearing tool and the second wearing tool, a relative speed of the first wearing tool and the second wearing tool, the first It may be configured to include one or more of the relative acceleration of the first wearing tool and the second wearing tool, the relative jerk of the first wearing tool and the second wearing tool, the myoelectric potential of the wearer, and the degree of bulging of the wearer's muscle. Good.
本発明による第3又は第4の筋力補助装置は、
筋力補助装置の姿勢を検出する姿勢センサをさらに備え、
前記制御部は、前記姿勢センサの検出結果に応じて前記所定の解除条件を調整するようにしてもよい。 The third or fourth muscle strength assisting device according to the present invention is:
A posture sensor for detecting the posture of the muscle force assisting device;
The control unit may adjust the predetermined release condition according to a detection result of the attitude sensor.
筋力補助装置の姿勢を検出する姿勢センサをさらに備え、
前記制御部は、前記姿勢センサの検出結果に応じて前記所定の解除条件を調整するようにしてもよい。 The third or fourth muscle strength assisting device according to the present invention is:
A posture sensor for detecting the posture of the muscle force assisting device;
The control unit may adjust the predetermined release condition according to a detection result of the attitude sensor.
本発明による第3又は第4の筋力補助装置は、
異常を検出する異常検出センサをさらに備え、
前記制御部は、前記第1装着具に対する前記第2装着具の前記一の向きへの相対動作が規制されている状態において、前記異常検出センサが異常を検出した場合、前記第1装着具に対する前記第2装着具の前記一の向きへの相対動作の規制を解除するよう、前記アシスト機構を制御してもよい。 The third or fourth muscle strength assisting device according to the present invention is:
It further includes an abnormality detection sensor for detecting an abnormality,
When the abnormality detection sensor detects an abnormality in a state in which the relative movement of the second wearing tool in the one direction with respect to the first wearing tool is restricted, the control unit applies to the first wearing tool. The assist mechanism may be controlled so as to cancel the restriction of the relative movement of the second wearing tool in the one direction.
異常を検出する異常検出センサをさらに備え、
前記制御部は、前記第1装着具に対する前記第2装着具の前記一の向きへの相対動作が規制されている状態において、前記異常検出センサが異常を検出した場合、前記第1装着具に対する前記第2装着具の前記一の向きへの相対動作の規制を解除するよう、前記アシスト機構を制御してもよい。 The third or fourth muscle strength assisting device according to the present invention is:
It further includes an abnormality detection sensor for detecting an abnormality,
When the abnormality detection sensor detects an abnormality in a state in which the relative movement of the second wearing tool in the one direction with respect to the first wearing tool is restricted, the control unit applies to the first wearing tool. The assist mechanism may be controlled so as to cancel the restriction of the relative movement of the second wearing tool in the one direction.
本発明による第3又は第4の筋力補助装置は、
前記制御部は、前記第1装着具に対する前記第2装着具の前記一の向きへの相対動作が規制されている状態において、前記異常検出センサが異常を検出した場合、前記解除条件が満されたと判断しても、前記第1装着具に対する前記第2装着具の前記一の向きへの相対動作の規制を維持するよう、前記アシスト機構を制御してもよい。 The third or fourth muscle strength assisting device according to the present invention is:
In the state where the relative movement of the second wearing tool in the one direction with respect to the first wearing tool is restricted, the control unit satisfies the release condition when the abnormality detecting sensor detects an abnormality. The assist mechanism may be controlled so as to maintain the restriction of the relative movement of the second wearing tool in the one direction with respect to the first wearing tool.
前記制御部は、前記第1装着具に対する前記第2装着具の前記一の向きへの相対動作が規制されている状態において、前記異常検出センサが異常を検出した場合、前記解除条件が満されたと判断しても、前記第1装着具に対する前記第2装着具の前記一の向きへの相対動作の規制を維持するよう、前記アシスト機構を制御してもよい。 The third or fourth muscle strength assisting device according to the present invention is:
In the state where the relative movement of the second wearing tool in the one direction with respect to the first wearing tool is restricted, the control unit satisfies the release condition when the abnormality detecting sensor detects an abnormality. The assist mechanism may be controlled so as to maintain the restriction of the relative movement of the second wearing tool in the one direction with respect to the first wearing tool.
本発明による第3又は第4の筋力補助装置において、前記異常検出センサは、着用者の筋電位を検出する筋電計、着用者の筋肉の隆起の度合いを検出するフォトリフレクタ、明るさを検出する光センサ、熱を検出する熱センサ、姿勢を検出する姿勢センサ、及び、周囲物との距離を検出する距離センサの一以上を含むようにしてもよい。
In the third or fourth muscle force assisting device according to the present invention, the abnormality detection sensor includes an electromyograph that detects a wearer's myoelectric potential, a photoreflector that detects the degree of the wearer's muscle bump, and a brightness detection One or more of an optical sensor that detects heat, a thermal sensor that detects heat, an attitude sensor that detects an attitude, and a distance sensor that detects a distance to a surrounding object may be included.
本発明によれば、筋力補助装置において、意図せずに筋力補助力が解除されることを効果的に防止することができる。
According to the present invention, in the muscle force assisting device, it is possible to effectively prevent the muscle force assisting force from being released unintentionally.
以下、図面を参照して本発明の一実施の形態について説明する。図1~図11は、本発明の一実施の形態及びその変形例を説明するための図である。このうち、図1及び図2は、筋力補助装置10の全体を示す斜視図であり、とりわけ図1は、人体に装着した状態にて筋力補助装置10を示している。
Hereinafter, an embodiment of the present invention will be described with reference to the drawings. 1 to 11 are diagrams for explaining an embodiment of the present invention and a modification thereof. Among these, FIG.1 and FIG.2 is a perspective view which shows the whole muscular strength assistance apparatus 10, and especially FIG. 1 has shown the muscular strength assistance apparatus 10 in the state with which the human body was mounted | worn.
筋力補助装置10は、相対動作可能に連結された第1装着具20及び第2装着具25と、第1装着具20及び第2装着具25の相対位置を制御するアシスト機構(位置制御装置)15と、を有している。筋力補助装置10は、第1装着具20及び第2装着具25の相対動作に関連した指標、並びに、第1装着具20及び第2装着具25を相対回転させようとする力に関連した指標の少なくとも一方を得るためのセンサ80と、センサ80からの情報に基づいてアシスト機構15を制御する制御部13と、をさらに有している。アシスト機構15は、制御部13に制御されて、第1装着具20に対する第2装着具25の少なくとも一の向きへの相対動作を規制することができる。
The muscle force assisting apparatus 10 includes a first mounting tool 20 and a second mounting tool 25 that are connected so as to be relatively movable, and an assist mechanism (position control device) that controls a relative position between the first mounting tool 20 and the second mounting tool 25. 15. The muscle force assisting apparatus 10 includes an index related to the relative movement of the first mounting tool 20 and the second mounting tool 25, and an index related to a force for relatively rotating the first mounting tool 20 and the second mounting tool 25. The sensor 80 for obtaining at least one of the above and the control unit 13 for controlling the assist mechanism 15 based on information from the sensor 80 are further provided. The assist mechanism 15 can be controlled by the control unit 13 to restrict the relative movement of the second mounting tool 25 relative to the first mounting tool 20 in at least one direction.
以下の説明する例では、第1装着具20及び第2装着具25が、アシスト軸線となる第1回転軸線d1を中心として相対回転可能となっており、アシスト機構15が、第2装着具25の第1装着具20に対するアシスト軸線(第1回転軸線d1)を中心とした回転位置を制御する。すなわち、アシスト軸線は、筋力補助装置10から筋力補助のために出力されるアシスト力によって相対回転を制御されるようになる第1装着具20及び第2装着具25の回転軸線のことを指している。とりわけ図示された例において、アシスト機構15は、第1装着具20に保持された出力手段30と、出力手段30から出力された力を第2装着具25まで伝達する伝達手段35と、を有している。制御部13は、出力手段30及び伝達手段35の動作を制御する。アシスト機構15は、制御部13に制御されて、第1装着具20に対する第2装着具25のアシスト軸線d1を中心とした少なくとも一方向への相対回転を規制することができる。
In the example described below, the first mounting tool 20 and the second mounting tool 25 are capable of relative rotation about the first rotation axis d1 serving as an assist axis, and the assist mechanism 15 is configured to be the second mounting tool 25. The rotational position around the assist axis (first rotation axis d1) with respect to the first wearing tool 20 is controlled. That is, the assist axis refers to the rotation axis of the first wearing tool 20 and the second wearing tool 25 whose relative rotation is controlled by the assist force output from the muscle force assisting device 10 for assisting muscle strength. Yes. In particular, in the illustrated example, the assist mechanism 15 includes an output unit 30 held by the first mounting tool 20 and a transmission unit 35 that transmits the force output from the output unit 30 to the second mounting tool 25. is doing. The control unit 13 controls the operations of the output unit 30 and the transmission unit 35. The assist mechanism 15 can be controlled by the control unit 13 to restrict relative rotation of the second wearing tool 25 relative to the first wearing tool 20 in at least one direction around the assist axis d1.
図1に示すように、第1装着具20及び第2装着具25は、関節によって接続された人体の二つの部位にそれぞれ取り付けられる。アシスト機構15は、制御部13からの指示に基づいて第1装着具20及び第2装着具25の相対位置を制御し、関節を介した二つの部位の筋力を補助する。とりわけここで説明する筋力補助装置10には、意図しない位置で筋力の補助を受けることを効果的に防止して所望とする体勢にて筋力の補助を受けること可能にするための工夫、並びに、意図せずに筋力の補助が解除されることを効果的に防止するための工夫がなされている。
As shown in FIG. 1, the first wearing tool 20 and the second wearing tool 25 are respectively attached to two parts of a human body connected by joints. The assist mechanism 15 controls the relative positions of the first wearing tool 20 and the second wearing tool 25 based on an instruction from the control unit 13 and assists the muscle strength of the two parts via the joint. In particular, the muscle strength assisting device 10 described here includes a device for effectively preventing muscle strength assistance at an unintended position so as to receive muscle strength assistance at a desired posture, and A device has been devised to effectively prevent unintentional release of muscle strength assistance.
図示された例では、第1装着具20が、装着ベルト11(図3~図5)を介して胴体に取り付けられ、第2装着具25が、後述する装着部26を介して上腕に取り付けられる。そして、筋力補助装置10は、肩の動作を補助する。ここで、一つの関節は、互いに異なる軸線を中心とした複数種の相対回転運動を可能にする。図1に示すように、肩関節は、上腕を胴体に対して屈伸軸daを中心として相対回転させる屈曲伸展運動と、上腕を胴体に対して内外転軸dbを中心として相対回転させる内転外転運動と、上腕を胴体に対して内外旋軸dcを中心として相対回転させる内旋外旋運動と、を可能にする。そして、図示された筋力補助装置10は、後述するように、上腕が下がらないように所定の位置に保持することを補助する。
In the illustrated example, the first mounting tool 20 is attached to the trunk via the mounting belt 11 (FIGS. 3 to 5), and the second mounting tool 25 is attached to the upper arm via a mounting part 26 described later. . The muscle force assisting device 10 assists the movement of the shoulder. Here, one joint enables multiple types of relative rotational movements about different axes. As shown in FIG. 1, the shoulder joint is bent and extended by rotating the upper arm relative to the trunk about the bending axis da, and the adduction and outer rotation rotating the upper arm relative to the trunk about the inner and outer rotation axis db. It is possible to perform a rolling motion and an internal / external rotational motion in which the upper arm rotates relative to the trunk about the internal / external rotational axis dc. The illustrated muscle strength assisting device 10 assists in holding the upper arm in a predetermined position so that the upper arm is not lowered, as will be described later.
また図示された例においてアシスト機構15は、筋肉補助力(アシスト力)の出力部としての出力軸76を有している。出力軸76は、第1回転軸線(アシスト軸線)d1を中心として第1装着具20に対して相対回転可能となっている。この出力軸76が、第2装着具25と接続している。出力軸76の回転軸線となる第1回転軸線d1は、肩の屈伸軸daに対応して設けられている。第2装着具25が第1装着具20に対して第1回転軸線d1を中心として相対回転することにより、肩関節を中心とした、上腕の屈曲運動及び伸展運動が可能となる。
In the illustrated example, the assist mechanism 15 has an output shaft 76 as an output unit for muscle assisting force (assist force). The output shaft 76 is rotatable relative to the first wearing tool 20 around the first rotation axis (assist axis) d1. The output shaft 76 is connected to the second mounting tool 25. The first rotation axis d1 that is the rotation axis of the output shaft 76 is provided corresponding to the shoulder bending axis da. When the second mounting tool 25 rotates relative to the first mounting tool 20 about the first rotation axis d1, the upper arm can bend and extend about the shoulder joint.
なお、本発明による筋力補助装置は、図示された例に限られず、屈曲運動、伸展運動、内転運動、外転運動、内旋運動、外旋運動のいずれか一以上を補助するようにしてもよい。また、本発明による筋力補助装置は、図示された例に限られず、肘、首、腰、股、手首等における人体の動作を補助するようにしてもよい。
The muscle force assisting device according to the present invention is not limited to the illustrated example, and assists at least one of bending motion, extension motion, adduction motion, abduction motion, internal rotation motion, and external rotation motion. Also good. Further, the muscle force assisting device according to the present invention is not limited to the illustrated example, and may assist the movement of the human body in the elbow, neck, waist, crotch, wrist and the like.
以下、図示された具体例を参照しながら、各構成要素について順に説明していく。なお、以下で参照する図1~図14においては、理解の容易を図るため、一の図面で示されている構成要素が、他の図面に省略されていることもある。
Hereinafter, each component will be described in order with reference to the illustrated example. 1 to 14 referred to below, the components shown in one drawing may be omitted in the other drawings for easy understanding.
まず、第1装着具20について説明する。図1及び図2に示すように、第1装着具20は、中央フレーム21及び側方フレーム22を有している。中央フレーム21には、装着ベルト11(図3~図5)が取り付けられるベルト保持部21aが設けられている。中央フレーム21が、装着ベルト11を介して着用者の胴体、とりわけ背中に対面する位置に取り付けられる。側方フレーム22は、中央フレーム21から横方向外方に延び出している。側方フレーム22は、中央フレーム21に接続した後方フレーム部22aと、後方フレーム部22aの横方向外方端から前方に延び出した前方延出フレーム部22bと、を有している。後方フレーム部22aは、肩に後方から対面する位置に配置されている。前方延出フレーム部22bは、肩に横方向における外方から対面する位置に配置されている。側方フレーム22は、中央フレーム21に対して、第3回転軸線d3を中心として相対回転可能に接続されている。この第3回転軸線d3は、肩の内外旋軸dcに対応して設けられている。側方フレーム22が中央フレーム21に対して第3回転軸線d3を中心として相対回転することにより、肩関節を中心とした、上腕の内旋運動及び外旋運動が可能となる。
First, the first wearing tool 20 will be described. As shown in FIGS. 1 and 2, the first wearing tool 20 has a center frame 21 and side frames 22. The central frame 21 is provided with a belt holding portion 21a to which the mounting belt 11 (FIGS. 3 to 5) is attached. The central frame 21 is attached to the wearer's torso, particularly at a position facing the back, via the mounting belt 11. The side frame 22 extends laterally outward from the central frame 21. The side frame 22 includes a rear frame portion 22a connected to the central frame 21, and a front extension frame portion 22b extending forward from the laterally outer end of the rear frame portion 22a. The rear frame portion 22a is disposed at a position facing the shoulder from the rear. The front extension frame portion 22b is disposed at a position facing the shoulder from the outside in the lateral direction. The side frame 22 is connected to the center frame 21 so as to be relatively rotatable about the third rotation axis d3. The third rotation axis d3 is provided corresponding to the inner / outer rotation axis dc of the shoulder. When the side frame 22 rotates relative to the center frame 21 around the third rotation axis d3, it is possible to perform the internal and external rotations of the upper arm around the shoulder joint.
肩の動作を補助する図示された筋力補助装置10は、両方の肩に作用するように構成されている。具体的には、中央フレーム21の両側方にそれぞれ側方フレーム22が設けられている。各側方フレーム22に、アシスト機構15の伝達手段35等が支持されている。また、各側方フレーム22に対応して、第2装着具25が設けられている。中央フレーム21を中心として両側方に設けられた一対の構成要素は、対称性を有しているものの、その他において同一に構成され得る。したがって、以下の説明および図3~図9においては、右肩に作用する構成について記載する。
The illustrated muscle strength assisting device 10 that assists the movement of the shoulder is configured to act on both shoulders. Specifically, side frames 22 are provided on both sides of the central frame 21. Each side frame 22 supports the transmission means 35 of the assist mechanism 15 and the like. A second mounting tool 25 is provided corresponding to each side frame 22. The pair of components provided on both sides with respect to the central frame 21 have symmetry but may be configured identically in the other. Therefore, in the following description and FIGS. 3 to 9, the structure acting on the right shoulder will be described.
また、本明細書で用いる「前」、「後」、「上」、「下」及び「横方向」等の用語は、筋力補助装置10を着用した着用者を基準とする「前」、「後」、「上」、「下」及び「横方向」を意味することとする。
In addition, terms such as “front”, “back”, “up”, “down”, and “lateral direction” used in this specification are “front”, “ It means “back”, “up”, “down” and “lateral direction”.
次に、第2装着具25について説明する。図3は、前方(正面)から、第2装着具25を示している。第2装着具25は、詳しくは後述する伝達手段35の出力軸76と接続している。第2装着具25は、出力軸76の回転にともなって、出力軸76の回転軸線である第1回転軸線d1を中心として回転する。第2装着具25は、人体に取り付けられる装着部26と、出力軸76と固定された作用部28と、装着部26と作用部28とを連結する連結部27と、を有している。作用部28は、伝達手段35の最下流側(最出力側)となる出力軸76から出力手段30で発生された力を入力される。連結部27は、出力軸76の第1装着具20に対する回転にともなって装着部26が第1装着具20に対して回転するよう、作用部28と装着部26とを連結している。
Next, the second wearing tool 25 will be described. FIG. 3 shows the second mounting tool 25 from the front (front). The second mounting tool 25 is connected to an output shaft 76 of the transmission means 35 described later in detail. As the output shaft 76 rotates, the second mounting tool 25 rotates about the first rotation axis d <b> 1 that is the rotation axis of the output shaft 76. The second mounting tool 25 includes a mounting portion 26 attached to the human body, an action portion 28 fixed to the output shaft 76, and a connecting portion 27 that connects the mounting portion 26 and the action portion 28. The action unit 28 receives the force generated by the output unit 30 from the output shaft 76 which is the most downstream side (most output side) of the transmission unit 35. The connecting part 27 connects the action part 28 and the mounting part 26 so that the mounting part 26 rotates with respect to the first mounting tool 20 as the output shaft 76 rotates with respect to the first mounting tool 20.
図示された例において、装着部26は、人体の上腕に取り付けられる。装着部26は、アシスト機構15から供給される力を上腕に効率的に伝達するため、第1回転軸線d1周りの回転にともなった移動方向への上腕との相対移動を規制されることが好ましい。とりわけ筋力補助装置10が上腕の持ち上げを補助する場合には、上腕の装着部26に対する後方への相対移動を効果的に規制することが好ましい。図3によく示されているように、図示された装着部26は、上腕が挿入される筒状部を形成するベルト保持部26a及び腕ベルト26bと、連結部27と接続するブラケット26cと、を有している。ベルト保持部26a及びブラケット26cは、例えば、高剛性の樹脂成形物等からなる。図示された例において、ベルト保持部26a及びブラケット26cは、一体的に形成されている。図4及び図5に示すように、ベルト保持部26aは、上腕に対して後方から対面する位置に配置される。一方、腕ベルト26bは、柔軟性を有したベルト材からなり、上腕に対して主として前方から対面する位置に配置される。腕ベルト26bの長さを調節することで、装着部26が上腕を安定して保持することが可能となる。
In the illustrated example, the mounting portion 26 is attached to the upper arm of the human body. In order to efficiently transmit the force supplied from the assist mechanism 15 to the upper arm, the mounting portion 26 is preferably restricted from relative movement with the upper arm in the movement direction accompanying rotation around the first rotation axis d1. . In particular, when the muscle strength assisting device 10 assists the lifting of the upper arm, it is preferable to effectively restrict the relative movement of the upper arm relative to the mounting portion 26 in the rearward direction. As shown in FIG. 3, the illustrated mounting portion 26 includes a belt holding portion 26 a and an arm belt 26 b that form a cylindrical portion into which the upper arm is inserted, a bracket 26 c that is connected to the connecting portion 27, and have. The belt holding part 26a and the bracket 26c are made of, for example, a highly rigid resin molded product. In the illustrated example, the belt holding portion 26a and the bracket 26c are integrally formed. As shown in FIGS. 4 and 5, the belt holding portion 26a is disposed at a position facing the upper arm from the rear. On the other hand, the arm belt 26b is made of a belt material having flexibility, and is disposed at a position facing the upper arm mainly from the front. By adjusting the length of the arm belt 26b, the mounting portion 26 can stably hold the upper arm.
連結部27は、アシスト機構15から供給される力を装着部26に伝達するため、第1回転軸線d1を中心として、装着部26及び作用部28が相対回転しないように、装着部26及び作用部28を連結している。すなわち、第2装着具25は、アシスト機構15から第1回転軸線d1を中心とした回転力を作用されるため、遊びや構成要素自体の弾性変形を除くと、アシスト機構15から回転力を入力される作用部28と人体に補助力を出力する装着部26は、アシスト機構15から入力される力の方向、つまり第1回転軸線d1を中心とした円周方向に、相対動作しないようになっている。
Since the connecting portion 27 transmits the force supplied from the assist mechanism 15 to the mounting portion 26, the mounting portion 26 and the operation portion 26 and the operation portion are prevented from rotating relative to each other about the first rotation axis d1. The part 28 is connected. That is, since the second mounting tool 25 receives a rotational force about the first rotational axis d1 from the assist mechanism 15, the rotational force is input from the assist mechanism 15 except for play and elastic deformation of the component itself. The acting portion 28 and the mounting portion 26 that outputs an assisting force to the human body are prevented from relatively moving in the direction of the force input from the assist mechanism 15, that is, in the circumferential direction around the first rotation axis d1. ing.
図示された例において、連結部27は、作用部28に対して第1回転軸線d1と垂直な第2回転軸線d2を中心として相対回転可能となるように、作用部28に接続している。この第2回転軸線d2は、肩の内外転軸dbに対応して設けられている。連結部27が作用部28に対して第2回転軸線d2を中心として相対回転することにより、肩関節を中心とした、上腕の内転運動及び外転運動が可能となる。
In the illustrated example, the connecting portion 27 is connected to the action portion 28 so as to be relatively rotatable with respect to the action portion 28 about a second rotation axis d2 perpendicular to the first rotation axis d1. The second rotation axis d2 is provided corresponding to the inner / outer rotation axis db of the shoulder. When the connecting portion 27 rotates relative to the action portion 28 around the second rotation axis d2, the upper arm can perform an adduction and abduction motion around the shoulder joint.
着用者の拘束感を軽減する目的からは、連結部27は、第1回転軸線d1に直交する面への投影において、第1回転軸線d1と装着部26との間の距離が変化するように、装着部26と作用部28とを接続していることが好ましい。さらに、着用者の拘束感を軽減する目的からは、連結部27は、第2装着具25が作用部28から装着部26までの間に3自由度を持つ機構を構成するよう、作用部28と装着部26とを連結していることが好ましい。図3によく示されているように、図示された例において、連結部27は、作用部28に対して動作可能に接続した第1リンク27aと、第1リンク27aに動作可能に接続し且つ装着部26に動作可能に接続した第2リンク27bと、を有している。この連結部27によれば、作用部28から装着部26までの構成により、3自由度の動作を行うことができる。言い換えると、装着部26は、作用部28に対して、3自由度の相対動作を行うことができる。
For the purpose of reducing the sense of restraint of the wearer, the connecting portion 27 is designed so that the distance between the first rotation axis d1 and the mounting portion 26 changes in the projection onto the plane orthogonal to the first rotation axis d1. The mounting part 26 and the action part 28 are preferably connected. Furthermore, for the purpose of reducing the wearer's sense of restraint, the connecting portion 27 is configured so that the second mounting tool 25 forms a mechanism having three degrees of freedom between the operating portion 28 and the mounting portion 26. And the mounting portion 26 are preferably connected. As well shown in FIG. 3, in the illustrated example, the connecting portion 27 is operatively connected to the first link 27a, a first link 27a operably connected to the working portion 28, and And a second link 27b operably connected to the mounting portion 26. According to the connecting portion 27, the operation from the action portion 28 to the mounting portion 26 can be performed with three degrees of freedom. In other words, the mounting portion 26 can perform a relative motion with three degrees of freedom with respect to the action portion 28.
図3~図5に示された例において、第1リンク27aと第2リンク27bは、第1連結回転軸線d2aを中心として相対回転可能に接続している。第1連結回転軸線d2aは、第1回転軸線d1と垂直であり、第2回転軸線d2と平行になっている。第2リンク27bと装着部26は、第2連結回転軸線d2bを中心として相対回転可能に接続している。第2連結回転軸線d2bは、第1回転軸線d1と垂直であり、第2回転軸線d2と平行になっている。
In the example shown in FIGS. 3 to 5, the first link 27a and the second link 27b are connected so as to be rotatable relative to each other about the first connecting rotation axis d2a. The first connection rotation axis d2a is perpendicular to the first rotation axis d1 and is parallel to the second rotation axis d2. The second link 27b and the mounting portion 26 are connected so as to be relatively rotatable about the second coupling rotation axis d2b. The second connection rotation axis d2b is perpendicular to the first rotation axis d1 and is parallel to the second rotation axis d2.
また、図3に示すように、第2回転軸線d2と直交する面内において、連結部27の第1リンク27a及び第2リンク27bの接続位置(以下において、「中間接続位置」とも呼ぶ)mjは、連結部27と作用部28との接続位置(以下において、「基端側接続位置」とも呼ぶ)pjと、連結部27と装着部26との接続位置(以下において、「先端側接続位置」とも呼ぶ)djと、を通過する仮想直線vslに対して常に一方の側に位置している。とりわけ図示された例においては、構造的に、中間接続位置mjが、常に、基端側接続位置pj及び先端側接続位置djを通過する仮想直線vslの一方側に位置するようになっている。つまり、連結部27の両端が最も離間するように伸張した場合においても、中間接続位置mjは、仮想直線vsl上に位置していない。そして、図示された例において、中間接続位置mjは、仮想直線vslに対して、出力軸76と同一の側に位置している。図3に示すように、中間接続位置mjは、出力軸76とともに、仮想直線vslを挟んで人体とは反対側に位置している。この構成によれば、連結部27が短縮した際に、連結部27の中間部が、人体に接触してしまうことを効果的に回避することができる。
Further, as shown in FIG. 3, in the plane orthogonal to the second rotation axis d2, the connection position of the first link 27a and the second link 27b of the connecting portion 27 (hereinafter also referred to as “intermediate connection position”) mj Is a connection position (hereinafter also referred to as “base end side connection position”) pj between the connecting portion 27 and the action portion 28 and a connection position (hereinafter referred to as “tip side connection position”) between the connecting portion 27 and the mounting portion 26. Is also always located on one side with respect to the virtual straight line vsl passing through dj. In particular, in the illustrated example, structurally, the intermediate connection position mj is always positioned on one side of the virtual straight line vsl that passes through the proximal end side connection position pj and the distal end side connection position dj. In other words, even when both ends of the connecting portion 27 are extended so as to be separated from each other, the intermediate connection position mj is not located on the virtual straight line vsl. In the illustrated example, the intermediate connection position mj is located on the same side as the output shaft 76 with respect to the virtual straight line vsl. As shown in FIG. 3, the intermediate connection position mj is located on the opposite side of the human body with the output shaft 76 across the virtual straight line vsl. According to this structure, when the connection part 27 shortens, it can avoid effectively that the intermediate part of the connection part 27 contacts a human body.
なお、図3に示された例では、連結部27が、付勢部材として機能する付勢材27cを有している。付勢材27cは、第1リンク27a及び第2リンク27bに跨がって配置されている。付勢材27cは、第2リンク27b及び装着部26の自重に抗して、第2リンク27b及び装着部26をいくらか引き上げ、これにより図3に示すように、第1リンク27a及び第2リンク27bを屈曲した状態に維持する。連結部27は、図3に示された状態から、その両端間の距離を長くするように曲がること及び短くするように曲がることの両方可能となっている。
In addition, in the example shown by FIG. 3, the connection part 27 has the biasing material 27c which functions as a biasing member. The urging member 27c is disposed across the first link 27a and the second link 27b. The biasing member 27c slightly lifts the second link 27b and the mounting part 26 against the weight of the second link 27b and the mounting part 26, and as a result, as shown in FIG. 3, the first link 27a and the second link 27b is kept bent. From the state shown in FIG. 3, the connecting portion 27 can both bend so as to increase the distance between both ends and bend so as to shorten it.
ただし、図示された例とは異なり、連結部27が、最も伸張した場合に仮想直線vslに位置するようにしてもよいし、また、中間接続位置mjが、仮想直線vslの両側に位置することが可能となっていてもよい。このような筋力補助装置10については、人体に装着した実際の使用中において連結部27が最も伸張する条件で、中間接続位置mjが、仮想直線vslの一方の側、とりわけ出力軸76と同一の側で人体とは反対側に、位置することが好ましい。この場合、筋力補助装置10の使用中に、連結部27の中間部が、人体に接触してしまうことを効果的に回避することができる。
However, unlike the example shown in the figure, the connecting portion 27 may be positioned on the virtual straight line vsl when it is most extended, and the intermediate connection positions mj are positioned on both sides of the virtual straight line vsl. May be possible. In such a muscle force assisting device 10, the intermediate connection position mj is the same as that on one side of the virtual straight line vsl, in particular, the output shaft 76 under the condition that the connecting portion 27 is most extended during actual use attached to the human body. It is preferable to be located on the side opposite to the human body. In this case, it is possible to effectively avoid the intermediate portion of the connecting portion 27 from coming into contact with the human body during use of the muscle force assisting device 10.
次に、アシスト機構15について説明する。上述したように、アシスト機構15は、第1装着具20に保持された出力手段30と、出力手段30から出力された力を第2装着具25まで伝達する伝達手段35と、を有している。このアシスト機構15は、第1装着具20及び第2装着具25の相対位置を制御することができる。とりわけ図示された例において、アシスト機構15は、第1回転軸線(アシスト軸線)を中心として相対回転可能に第1装着具20及び第2装着具25に連結し、且つ、制御部13からの指示により、アシスト機構15は、第1装着具20に対する第2装着具25のアシスト軸線d1を中心とした少なくとも一方向への相対回転を規制する。
Next, the assist mechanism 15 will be described. As described above, the assist mechanism 15 includes the output unit 30 held by the first mounting tool 20 and the transmission unit 35 that transmits the force output from the output unit 30 to the second mounting tool 25. Yes. The assist mechanism 15 can control the relative positions of the first wearing tool 20 and the second wearing tool 25. In particular, in the illustrated example, the assist mechanism 15 is coupled to the first mounting tool 20 and the second mounting tool 25 so as to be relatively rotatable about a first rotation axis (assist axis), and an instruction from the control unit 13. Thus, the assist mechanism 15 restricts relative rotation in at least one direction around the assist axis d1 of the second mounting tool 25 with respect to the first mounting tool 20.
まず、出力手段30について説明する。出力手段30は、いわゆるアクチュエータを含んでおり、第1装着具20及び第2装着具25の相対位置を制御するための筋力の補助として利用される力を伝達手段35に出力する。図示された例において、アシスト機構15は、伸縮可能なアクチュエータ、言い換えると、その長手方向長さを変化させる直動型のアクチュエータ31を有している。図5に示すように、アクチュエータ31は、一端において、伝達手段35に接続している。アクチュエータ31は、その他端において、第1装着具20の側方フレーム22(後方フレーム部22a)に接続している。出力手段30に要求される筋力に応じて、複数のアクチュエータ31を設けることができる。
First, the output means 30 will be described. The output unit 30 includes a so-called actuator, and outputs to the transmission unit 35 a force that is used as auxiliary muscle power for controlling the relative positions of the first mounting tool 20 and the second mounting tool 25. In the illustrated example, the assist mechanism 15 includes a retractable actuator, in other words, a linear motion type actuator 31 that changes the length in the longitudinal direction. As shown in FIG. 5, the actuator 31 is connected to the transmission means 35 at one end. The actuator 31 is connected to the side frame 22 (rear frame portion 22a) of the first wearing tool 20 at the other end. A plurality of actuators 31 can be provided according to the muscular strength required for the output means 30.
アクチュエータ31として、流体圧により膨張および収縮可能な部材を用いることができる。一具体例として、アクチュエータ31として、流体圧式アクチュエータとして知られたMcKibben人工筋肉を用いることができる。McKibben人工筋肉からなるアクチュエータ31は、流体(典型的には、気体)を内部に供給されることで、拡径するとともに短縮する。アクチュエータ31は、この短縮にともなって、収縮力を発生させる。図示された例において、出力手段30は、アクチュエータ31に流体を供給可能な流体源(流体圧源)32を有している。図5に示すように、例えばコンプレッサとして構成された流体源32が、第1装着具20の中央フレーム21に支持されている。
A member that can be expanded and contracted by fluid pressure can be used as the actuator 31. As a specific example, McKibben artificial muscle known as a hydraulic actuator can be used as the actuator 31. The actuator 31 composed of the McKibben artificial muscle is expanded and shortened by supplying a fluid (typically gas) to the inside. The actuator 31 generates a contracting force along with the shortening. In the illustrated example, the output unit 30 includes a fluid source (fluid pressure source) 32 that can supply a fluid to the actuator 31. As shown in FIG. 5, a fluid source 32 configured as, for example, a compressor is supported by the central frame 21 of the first wearing tool 20.
次に、伝達手段35について説明する。伝達手段35は、出力手段30から出力された筋力補助力を第2装着具25まで伝達する。図6に示すように、ここで説明する伝達手段35は、出力手段30から出力された力の第2装着具25への伝達および遮断を切り替える切替手段40を含んでいる。図6は、アクチュエータ31及び第2装着具25とともに、伝達手段35の構成を示す斜視図である。図6においては、理解の容易を図るため、第1装着具20等を省略している。
Next, the transmission means 35 will be described. The transmission unit 35 transmits the muscle force assisting force output from the output unit 30 to the second wearing tool 25. As shown in FIG. 6, the transmission means 35 described here includes a switching means 40 that switches between transmission and interruption of the force output from the output means 30 to the second mounting tool 25. FIG. 6 is a perspective view showing the configuration of the transmission means 35 together with the actuator 31 and the second mounting tool 25. In FIG. 6, the first wearing tool 20 and the like are omitted for easy understanding.
切替手段40は、第1部材41及び第2部材46を有しており、詳しくは後述するようにドラムブレーキ機構またはバンドブレーキ機構39として機能する。第1部材41は、第1中間回転軸線d1aを中心として回転可能に、第1装着具20の側方フレーム22、とりわけ後方フレーム部22aに支持されている。第2部材46は、直動運動するアクチュエータ31の一端と接続している。第1部材41及び第2部材46は、相対接離可能である。すなわち、第1部材41及び第2部材46は、互いから離間する動作、及び、互いに接近する動作を行うことができる。とりわけ図示された例において、第1部材41及び第2部材46は、互いから離間した相対位置、及び、互いに接触した相対位置をとることができる。第1部材41は、第2部材46から離間した位置において、第2部材46に拘束されることなく回転することができる。第2部材46は、第1部材41と接触した状態において、第1部材41の回転位置を保持する。言い換えると、第2部材46は、第1部材41と接触した状態において、第2部材46と第1部材41との相対動作、とりわけ相対回転を規制する。図示された例において、第1部材41は、第2装着具25に連結し、とりわけ、第1部材41が第2装着具25と連動し、さらに詳しくは、第1部材41の動作に応じて第2装着具25が動作する。したがって、第1部材41及び第2部材46の相対位置を調節することで、第2装着具25を介して着用者の上腕を所定に位置に維持することができる。
The switching means 40 has a first member 41 and a second member 46, and functions as a drum brake mechanism or a band brake mechanism 39 as will be described in detail later. The first member 41 is supported by the side frame 22 of the first mounting tool 20, particularly the rear frame portion 22a, so as to be rotatable about the first intermediate rotation axis d1a. The second member 46 is connected to one end of the actuator 31 that moves linearly. The first member 41 and the second member 46 are capable of relative contact and separation. That is, the first member 41 and the second member 46 can perform an operation of separating from each other and an operation of approaching each other. In particular, in the illustrated example, the first member 41 and the second member 46 can take a relative position separated from each other and a relative position in contact with each other. The first member 41 can rotate without being restrained by the second member 46 at a position separated from the second member 46. The second member 46 holds the rotational position of the first member 41 in a state where the second member 46 is in contact with the first member 41. In other words, the second member 46 restricts the relative operation, particularly the relative rotation, between the second member 46 and the first member 41 in a state where the second member 46 is in contact with the first member 41. In the illustrated example, the first member 41 is connected to the second mounting tool 25, and in particular, the first member 41 is interlocked with the second mounting tool 25, and more specifically according to the operation of the first member 41. The second mounting tool 25 operates. Therefore, by adjusting the relative positions of the first member 41 and the second member 46, the upper arm of the wearer can be maintained at a predetermined position via the second wearing tool 25.
切替手段40の具体的な構成は後述するとして、先に、主として図6を参照しながら、伝達手段35の切替手段40以外の構成について説明する。図6に示された例において、伝達手段35は、切替手段40に加えて、切替手段40の第1部材41と接続した第1中継軸部材71と、第1中継軸部材71と連動する第2中継軸部材73と、第2中継軸部材73と連動する出力軸76と、を有している。
As a specific configuration of the switching unit 40 will be described later, the configuration of the transmission unit 35 other than the switching unit 40 will be described first with reference mainly to FIG. In the example shown in FIG. 6, in addition to the switching means 40, the transmission means 35 includes a first relay shaft member 71 connected to the first member 41 of the switching means 40 and a first relay shaft member 71 that is linked to the first relay shaft member 71. The second relay shaft member 73 and the output shaft 76 interlocking with the second relay shaft member 73 are provided.
第1中継軸部材71は、第1装着具20の側方フレーム22をなす後方フレーム部22aに保持されている。第1中継軸部材71は、第1中間回転軸線d1aを中心として回転可能に保持されている。第1部材41は、第1中継軸部材71に固定されている。これにより、第1部材41は、側方フレーム22の後方フレーム部22aに支持され、且つ、第1中継軸部材71と同期して第1中間回転軸線d1aを中心として回転する。第1中継軸部材71には、第1伝達歯車72が固定されている。第1伝達歯車72は、例えば平歯車として構成されている。
The first relay shaft member 71 is held by the rear frame portion 22a that forms the side frame 22 of the first mounting tool 20. The first relay shaft member 71 is held rotatably about the first intermediate rotation axis d1a. The first member 41 is fixed to the first relay shaft member 71. Thus, the first member 41 is supported by the rear frame portion 22a of the side frame 22 and rotates around the first intermediate rotation axis d1a in synchronization with the first relay shaft member 71. A first transmission gear 72 is fixed to the first relay shaft member 71. The first transmission gear 72 is configured as a spur gear, for example.
第2中継軸部材73は、第1装着具20の側方フレーム22をなす前方延出フレーム部22bに保持されている。第2中継軸部材73は、第2中間回転軸線d1bを中心として回転可能に保持されている。第2中継軸部材73には、第2伝達歯車74が固定されている。第2伝達歯車74は、第2中継軸部材73の一方の端部(後方端部)近傍に配置されている。この第2伝達歯車74は、第1伝達歯車72と螺合し、したがって、第2中継軸部材73は、第1中継軸部材71と連動する。第2伝達歯車74は、第1伝達歯車72に対応した構成を有しており、例えば平歯車として構成されている。図示された例において、第2中継軸部材73の回転軸線である第2中間回転軸線d1bは、第1中継軸部材71の回転軸線である第1中間回転軸線d1aと平行になっている。第1中継軸部材71の他方の端部(前方端部)近傍には、第3伝達歯車75が固定されている。第3伝達歯車75は、例えばはすば歯車として構成されている。
The second relay shaft member 73 is held by the front extending frame portion 22b that forms the side frame 22 of the first mounting tool 20. The second relay shaft member 73 is held rotatably about the second intermediate rotation axis d1b. A second transmission gear 74 is fixed to the second relay shaft member 73. The second transmission gear 74 is disposed in the vicinity of one end (rear end) of the second relay shaft member 73. The second transmission gear 74 is screwed with the first transmission gear 72. Therefore, the second relay shaft member 73 is interlocked with the first relay shaft member 71. The second transmission gear 74 has a configuration corresponding to the first transmission gear 72, and is configured as a spur gear, for example. In the illustrated example, the second intermediate rotation axis d1b that is the rotation axis of the second relay shaft member 73 is parallel to the first intermediate rotation axis d1a that is the rotation axis of the first relay shaft member 71. A third transmission gear 75 is fixed near the other end (front end) of the first relay shaft member 71. The third transmission gear 75 is configured as a helical gear, for example.
出力軸76は、第2中継軸部材73と同様に、前方延出フレーム部22bに保持されている。既に説明したように、出力軸76は、第1回転軸線(アシスト軸線)d1を中心として回転可能に保持されている。出力軸76には、第4伝達歯車77が固定されている。第4伝達歯車77は、出力軸76の一方の端部(外方端部)近傍に配置されている。この第4伝達歯車77は、第3伝達歯車75と螺合し、結果として、出力軸76は、第2中継軸部材73、第1中継軸部材71及び切替手段40の第1部材41と連動する。第4伝達歯車77は、第3伝達歯車75に対応した構成を有しており、例えばはすば歯車として構成されている。図示された例において、出力軸76の回転軸線である第1回転軸線d1は、第2中継軸部材73の回転軸線である第2中間回転軸線d1bと垂直であり且つ高さ方向にずれている。出力軸76の他方の端部(内方端部)は、第2装着具25の作用部28に固定されている。
The output shaft 76 is held by the front extension frame portion 22b, similarly to the second relay shaft member 73. As already described, the output shaft 76 is held rotatably about the first rotation axis (assist axis) d1. A fourth transmission gear 77 is fixed to the output shaft 76. The fourth transmission gear 77 is disposed in the vicinity of one end (outer end) of the output shaft 76. The fourth transmission gear 77 is screwed with the third transmission gear 75. As a result, the output shaft 76 is interlocked with the second relay shaft member 73, the first relay shaft member 71, and the first member 41 of the switching means 40. To do. The fourth transmission gear 77 has a configuration corresponding to the third transmission gear 75, and is configured as a helical gear, for example. In the illustrated example, the first rotation axis d1 that is the rotation axis of the output shaft 76 is perpendicular to the second intermediate rotation axis d1b that is the rotation axis of the second relay shaft member 73 and is shifted in the height direction. . The other end portion (inward end portion) of the output shaft 76 is fixed to the action portion 28 of the second wearing tool 25.
次に、主として図7~図9を参照して、切替手段40の詳細について説明する。まず、第1部材41について説明する。図7に示すように、第1部材41は、第1中継軸部材71に固定された回転ドラム42を有している。回転ドラム42は円板状の外径を有し、回転ドラム42の中心軸線は、第1中継軸部材71の回転軸線である第1中間回転軸線d1a上に位置している。回転ドラム42は、第1中継軸部材71を介して、側方フレーム22の後方フレーム部22aに保持されている。回転ドラム42の板面が、後方フレーム部22aの平面方向に揃っている。したがって、回転ドラム42が、着用者の身体から大きく突出することを効果的に防止することができる。回転ドラム42は、その表層部に摩擦層42aを有している。摩擦層42aは、後述する第2部材46と接触するようになる部位である。摩擦層42aは、第2部材46との間でより大きな摩擦力を生み出すゴム等から形成され得る。
Next, details of the switching means 40 will be described mainly with reference to FIGS. First, the first member 41 will be described. As shown in FIG. 7, the first member 41 has a rotating drum 42 fixed to the first relay shaft member 71. The rotating drum 42 has a disc-shaped outer diameter, and the central axis of the rotating drum 42 is located on the first intermediate rotation axis d1a that is the rotation axis of the first relay shaft member 71. The rotating drum 42 is held by the rear frame portion 22 a of the side frame 22 via the first relay shaft member 71. The plate surface of the rotating drum 42 is aligned in the plane direction of the rear frame portion 22a. Therefore, the rotating drum 42 can be effectively prevented from greatly protruding from the wearer's body. The rotating drum 42 has a friction layer 42a on its surface layer. The friction layer 42a is a part that comes into contact with a second member 46 described later. The friction layer 42 a may be formed of rubber or the like that generates a larger frictional force with the second member 46.
次に、第2部材46及び第2部材46に関連する構成について説明する。図7~図9に示すように、第2部材46は、第1揺動部材47a及び第2揺動部材47bを含んでいる。このうち、第1揺動部材47aが、そのブラケット48bを介して、アクチュエータ31と接続している。また、切替手段40は、プレート状に形成された一対の支持体50を有している。第2部材46(揺動部材47a,47b)は、一対の支持体50によって動作可能、とりわけ揺動可能に保持されている。図4に示すように、一対の支持体50は、第1中間回転軸線d1aと平行な方向に配列され、回転ドラム42並びに一対の揺動部材47a,47bは、一対の支持体50の間に位置している。回転ドラム42は、支持体50に対して第1中間回転軸線d1aを中心として相対回転可能となっている。すなわち、回転ドラム42は、一対の支持体50の間において、支持体50に対して回転可能となっている。なお、図7~図9においては、手間側の支持体50を省略している。
Next, the configuration related to the second member 46 and the second member 46 will be described. As shown in FIGS. 7 to 9, the second member 46 includes a first swing member 47a and a second swing member 47b. Of these, the first swing member 47a is connected to the actuator 31 via the bracket 48b. Moreover, the switching means 40 has a pair of support body 50 formed in plate shape. The second member 46 ( swing members 47a and 47b) is held by a pair of support bodies 50 so as to be operable, particularly swingable. As shown in FIG. 4, the pair of supports 50 are arranged in a direction parallel to the first intermediate rotation axis d1a, and the rotary drum 42 and the pair of swing members 47a and 47b are disposed between the pair of supports 50. positioned. The rotary drum 42 can rotate relative to the support 50 about the first intermediate rotation axis d1a. That is, the rotating drum 42 is rotatable with respect to the support body 50 between the pair of support bodies 50. 7 to 9, the support 50 on the labor side is omitted.
図7~図9に示すように、各揺動部材47a,47bは、円弧状の外形状を有している。各揺動部材47a,47bは、一方の端部部分を中心として、支持体50に対して揺動可能となっている。揺動部材47a,47bの揺動軸線は、第1中間回転軸線d1aと平行になっている。一対の支持体50の間となるスペースにおいて、回転ドラム42は、一対の揺動部材47a,47bの間に配置されている。各揺動部材47a,47bは、第1部材41の回転ドラム42に対して第1中間回転軸線d1aを中心とした径方向外方から対面している。一対の揺動部材47a,47bによって、回転ドラム42の外周面の多くの部分が覆われている。揺動部材47a,47bは、支持体50に対して揺動することで、第1中間回転軸線d1aを中心とした径方向外方から回転ドラム42に当接することができる。すなわち、第1部材41及び第2部材46は、バンドブレーキ機構39を形成している。第2部材46をなす各揺動部材47a,47bは、円弧状の本体部48と、第1部材41に当接する第2接触面46aを形成する摩擦体49と、を有している。摩擦体49は、回転ドラム42の摩擦層42aに接触し摩擦層42aとの間で摩擦力を生む。摩擦層42aは、十分な摩擦力を生み出す材料、例えばゴム等から形成される。
As shown in FIGS. 7 to 9, each of the swinging members 47a and 47b has an arcuate outer shape. Each swing member 47a, 47b is swingable with respect to the support 50 around one end portion. The swing axes of the swing members 47a and 47b are parallel to the first intermediate rotation axis d1a. In the space between the pair of supports 50, the rotating drum 42 is disposed between the pair of swing members 47a and 47b. Each swinging member 47a, 47b faces the rotating drum 42 of the first member 41 from the outside in the radial direction around the first intermediate rotation axis d1a. Many portions of the outer peripheral surface of the rotating drum 42 are covered by the pair of swinging members 47a and 47b. The swinging members 47a and 47b can come into contact with the rotating drum 42 from the outside in the radial direction around the first intermediate rotation axis d1a by swinging with respect to the support 50. That is, the first member 41 and the second member 46 form a band brake mechanism 39. Each of the swinging members 47 a and 47 b forming the second member 46 includes an arc-shaped main body 48 and a friction body 49 that forms a second contact surface 46 a that contacts the first member 41. The friction body 49 comes into contact with the friction layer 42a of the rotary drum 42 and generates a frictional force with the friction layer 42a. The friction layer 42a is formed of a material that generates a sufficient frictional force, such as rubber.
また、図示された例において、切替手段40は、揺動部材47a,47bが回転ドラム42から離間するよう付勢する付勢手段として、付勢部材52をさらに有している。付勢部材52は、支持体50に固定された支持ベース51と、各揺動部材47a,47bのブラケット48cと、の間に配置されている。図示された例において、付勢部材52は、引っ張りバネによって形成されている。
In the illustrated example, the switching unit 40 further includes a biasing member 52 as a biasing unit that biases the swinging members 47 a and 47 b away from the rotary drum 42. The urging member 52 is disposed between the support base 51 fixed to the support body 50 and the brackets 48c of the swing members 47a and 47b. In the illustrated example, the urging member 52 is formed by a tension spring.
さらに、各揺動部材47a,47bをなす本体部48は同期歯車48aを有している。この同期歯車48aによって、一対の揺動部材47a,47bの揺動動作が調整される。具体的には、一対の揺動部材47a,47b間での同期歯車48aの噛み合いにより、一対の揺動部材47a,47bが同期して対称的に回転ドラム42に対して動作する。したがって、アクチュエータ31からの作用により第1揺動部材47aが回転ドラム42に接触している際に、第2揺動部材47bも回転ドラム42に接触する。また、アクチュエータ31からの作用により第1揺動部材47aが回転ドラム42から離間すると、第2揺動部材47bも回転ドラム42から離間する。
Furthermore, the main body 48 forming each of the swinging members 47a and 47b has a synchronous gear 48a. The synchronizing gear 48a adjusts the swinging motion of the pair of swinging members 47a and 47b. Specifically, due to the meshing of the synchronous gear 48a between the pair of swing members 47a and 47b, the pair of swing members 47a and 47b operate synchronously and symmetrically with respect to the rotating drum 42. Therefore, when the first swing member 47 a is in contact with the rotating drum 42 due to the action from the actuator 31, the second swing member 47 b is also in contact with the rotating drum 42. Further, when the first swing member 47 a is separated from the rotary drum 42 by the action of the actuator 31, the second swing member 47 b is also separated from the rotary drum 42.
図示されたアシスト機構15では、アクチュエータ31が図7に示された状態から縮むと、図8に示すように、アクチュエータ31が、第2部材46をなす第1揺動部材47aを引き寄せる。これにより、一対の揺動部材47a,47bが第1部材41をなす回転ドラム42に当接する。図8に示された状態において、第2部材46は第1部材41を保持し、第2部材46と第1部材41との相対回転が規制される。このとき、第1部材41と連動して動作する第1中継軸部材71、第2中継軸部材73及び出力軸部材76も、回転を規制される。これにより、出力軸部材76を保持する第1装着具20と、出力軸部材76に接続した第2装着具25との、出力軸部材76の回転軸線である第1回転軸線(アシスト軸線)d1を中心とした相対回転が規制される。例えば、第2装着具25を装着された上腕が、アシスト機構15からの筋力の補助によって、所定の位置、例えば肩よりも持ち上げた位置に保持することを補助される。
In the illustrated assist mechanism 15, when the actuator 31 contracts from the state shown in FIG. 7, the actuator 31 pulls the first swing member 47 a forming the second member 46 as shown in FIG. 8. As a result, the pair of swinging members 47 a and 47 b abut on the rotating drum 42 forming the first member 41. In the state shown in FIG. 8, the second member 46 holds the first member 41, and relative rotation between the second member 46 and the first member 41 is restricted. At this time, the rotation of the first relay shaft member 71, the second relay shaft member 73, and the output shaft member 76 that operate in conjunction with the first member 41 is also restricted. Accordingly, the first rotation axis (assist axis) d1 which is the rotation axis of the output shaft member 76 between the first mounting tool 20 holding the output shaft member 76 and the second mounting tool 25 connected to the output shaft member 76. Relative rotation around is restricted. For example, the upper arm to which the second wearing tool 25 is worn is assisted by holding the muscles in a predetermined position, for example, a position lifted from the shoulder, with the assistance of the muscle force from the assist mechanism 15.
ところで、図示された例において、支持体50は、第1装着具20の側方フレーム22をなす後方フレーム部22aに支持されている。ただし、この支持体50は、後方フレーム部22aに対して回転可能となっている。具体的には、支持体50は、第1中継軸部材71に対して回転可能に保持されており、結果として、後方フレーム部22aに対して回転可能となっている。したがって、支持体50に支持された第2部材46および支持体50に固定された支持ベース51等も、第1装着具20に対して固定されておらず、第1装着具20に対して第1中間回転軸線d1aを中心として相対回転可能となっている。
By the way, in the illustrated example, the support body 50 is supported by the rear frame portion 22a that forms the side frame 22 of the first wearing tool 20. However, the support 50 is rotatable with respect to the rear frame portion 22a. Specifically, the support body 50 is rotatably held with respect to the first relay shaft member 71, and as a result, is rotatable with respect to the rear frame portion 22a. Therefore, the second member 46 supported by the support body 50, the support base 51 fixed to the support body 50, and the like are not fixed to the first mounting tool 20 and are second to the first mounting tool 20. A relative rotation is possible about one intermediate rotation axis d1a.
その一方で、切替手段40は、支持体50や第2部材46の自由な回転を規制するための調整手段37を更に有している。調整手段37から供給される力と、出力手段30から供給される力とのバランスにより、第1部材41、第2部材46及び支持体50の状態が制御されるようになる。図示された例において、この調整手段37は、支持体50や第2部材46を一方向に付勢する付勢部材38として形成されている。付勢部材38は、その一端を、側方フレーム22の後方フレーム部22aに取り付けられ、その他端を、第2揺動部材47bのブラケット48cに取り付けられている。図示された例において、付勢部材38は、付勢手段をなす引っ張りバネによって形成されている。
On the other hand, the switching means 40 further includes an adjusting means 37 for restricting free rotation of the support 50 and the second member 46. The state of the first member 41, the second member 46, and the support 50 is controlled by the balance between the force supplied from the adjusting unit 37 and the force supplied from the output unit 30. In the illustrated example, the adjusting means 37 is formed as a biasing member 38 that biases the support 50 and the second member 46 in one direction. One end of the urging member 38 is attached to the rear frame portion 22a of the side frame 22, and the other end is attached to the bracket 48c of the second swing member 47b. In the illustrated example, the urging member 38 is formed by a tension spring that forms urging means.
図8に示された状態において、すなわち、第2部材46が第1部材41を保持して第2部材46と第1部材41との相対回転が規制された状態において、アクチュエータ31から加えられる力は、調整手段37をなす付勢部材38からの付勢力よりも小さい。すなわち、第2部材46をなす揺動部材47a,47bを支持体50に対して揺動させるのに要する力は、第1装着具20に対して支持体50を回転させるのに要する力よりも小さくなっている。したがって、支持体50が第1装着具20に対して回転する前に、第2部材46をなす揺動部材47a,47bが支持体50に対して揺動する。これにより、第1部材41及び第2部材46の相対回転が規制され、第1装着具20および第2装着具25の自由な相対動作が拘束されるようになる。
In the state shown in FIG. 8, that is, in a state where the second member 46 holds the first member 41 and the relative rotation between the second member 46 and the first member 41 is restricted, the force applied from the actuator 31 Is smaller than the urging force from the urging member 38 constituting the adjusting means 37. That is, the force required to swing the swinging members 47 a and 47 b forming the second member 46 with respect to the support 50 is greater than the force required to rotate the support 50 with respect to the first wearing tool 20. It is getting smaller. Therefore, before the support body 50 rotates with respect to the first mounting tool 20, the swing members 47 a and 47 b forming the second member 46 swing with respect to the support body 50. Thereby, the relative rotation of the first member 41 and the second member 46 is restricted, and the free relative movement of the first mounting tool 20 and the second mounting tool 25 is restricted.
ただし、アクチュエータ31がMcKibben人工筋肉等である場合には、調整手段37をなす付勢部材38からの付勢力に抗する力を入力することで、支持体50を第1装着具20に対して図8に示す状態から図9に示す状態へと反時計回り方向に回転させることができる。その一方で、アクチュエータ31がMcKibben人工筋肉の場合であっても、支持体50を第1装着具20に対して図8の状態から時計回り方向には回転させることはできない。すなわち、図8に示された筋力補助装置10において、第2装着具25と連動する第1部材41は、第1装着具20に対して第1中間回転軸線d1aを中心として一方向(図8の時計回り方向)へ回転することを規制されつつ、第1装着具20に対して第1中間回転軸線d1aを中心として他方向(図8の反時計回り方向)へ回転することを許容されている。このとき、第1部材41と連動する第2装着具25は、第1装着具20に対して第1回転軸線d1を中心として一方向(図4の時計回り方向)へ回転することを規制されつつ、第1装着具20に対して第1回転軸線d1を中心として他方向(図8の反時計回り方向)へ回転することを許容されている。
However, when the actuator 31 is a McKibben artificial muscle or the like, the support body 50 is attached to the first wearing tool 20 by inputting a force against the urging force from the urging member 38 constituting the adjusting means 37. It can be rotated counterclockwise from the state shown in FIG. 8 to the state shown in FIG. On the other hand, even if the actuator 31 is a McKibben artificial muscle, the support 50 cannot be rotated clockwise from the state of FIG. That is, in the muscular strength assisting apparatus 10 shown in FIG. 8, the first member 41 interlocked with the second mounting tool 25 is unidirectional with respect to the first mounting tool 20 around the first intermediate rotation axis d1a (FIG. 8). In the other direction (counterclockwise direction in FIG. 8) around the first intermediate rotation axis d1a while being restricted from rotating in the clockwise direction). Yes. At this time, the second mounting tool 25 that is interlocked with the first member 41 is restricted from rotating in one direction (the clockwise direction in FIG. 4) around the first rotation axis d <b> 1 with respect to the first mounting tool 20. However, it is permitted to rotate in the other direction (counterclockwise direction in FIG. 8) about the first rotation axis d1 with respect to the first wearing tool 20.
なお、図8に示された状態から、第2装着具25と連動する第1部材41を第1装着具20に対して第1中間回転軸線d1aを中心として一方向(反時計回り方向)へ回転させることは、筋力補助装置10の着用者の上腕を上げる動作によって、実現され得る。その一方で、図示された例においては、アクチュエータ31が図8に示された状態から更に縮み得るようにすることで、図8の状態から図9の状態へと第2装着具25を第1装着具20に対して回転させることもできる。このような筋力補助装置10の動作は、上腕を持ち上げる動作を筋力補助することを意味している。
From the state shown in FIG. 8, the first member 41 interlocked with the second mounting tool 25 is moved in one direction (counterclockwise direction) with respect to the first mounting tool 20 around the first intermediate rotation axis d1a. The rotation can be realized by the operation of raising the upper arm of the wearer of the muscle strength assisting apparatus 10. On the other hand, in the illustrated example, by allowing the actuator 31 to further shrink from the state shown in FIG. 8, the second mounting tool 25 is moved from the state of FIG. 8 to the state of FIG. It can also be rotated relative to the mounting tool 20. Such an operation of the muscle force assisting device 10 means assisting the muscle force in the operation of lifting the upper arm.
次に、以上のような構成からなる筋力補助装置10の動作について説明する。
Next, the operation of the muscle force assisting apparatus 10 having the above configuration will be described.
図1に示すように、まず、装着ベルト11を用いて、第1装着具20の中央フレーム21を胴体に取り付ける。また、第2装着具25の装着部26を上腕に取り付ける。
As shown in FIG. 1, first, the center frame 21 of the first mounting tool 20 is attached to the trunk using the mounting belt 11. Further, the mounting portion 26 of the second mounting tool 25 is attached to the upper arm.
図示された筋力補助装置10は、図7に示された自由回転モード、及び、図8に示された回転制動モードのいずれかに維持され得る。
The illustrated muscle force assisting device 10 can be maintained in either the free rotation mode shown in FIG. 7 or the rotation braking mode shown in FIG.
まず、図7に示された自由回転モードでは、アクチュエータ31内の流体が排気され、アクチュエータ31は伸張している。したがって、第2部材46の揺動部材47a,47bは、アクチュエータ31から、第1部材41をなす回転ドラム42に向けた力を受けていない。その一方で、第2部材46をなす揺動部材47a,47bは、付勢部材52によって、第1部材41をなす回転ドラム42から離間する向きに付勢されている。したがって、自由回転モードでは、第1部材41は、第1中間回転軸線d1aを中心とした回転を、第2部材46によって規制されることなく、第1中間回転軸線d1aを中心として自由に回転することができる。
First, in the free rotation mode shown in FIG. 7, the fluid in the actuator 31 is exhausted, and the actuator 31 extends. Therefore, the swinging members 47 a and 47 b of the second member 46 do not receive a force from the actuator 31 toward the rotating drum 42 that forms the first member 41. On the other hand, the swinging members 47 a and 47 b forming the second member 46 are urged by the urging member 52 in a direction away from the rotating drum 42 forming the first member 41. Therefore, in the free rotation mode, the first member 41 freely rotates around the first intermediate rotation axis d1a without being restricted by the second member 46 from rotating around the first intermediate rotation axis d1a. be able to.
なお、第2部材46および第2部材46を支持する支持体50は、調整手段37をなす付勢部材38からの付勢力(引っ張り力)により、図7において時計回り方向に回転する力を受けている。ただし、調整手段37からの力は、主として、第2部材46及び支持体50の第1装着具20に対する回転に影響を与えるものであり、第2部材46の支持体50に対する揺動に影響を与えにくい向きの力となっている。したがって、自由回転モードでは、第1部材41と第2部材46は、互いから離間した状態となる。
The second member 46 and the support member 50 that supports the second member 46 receive a force that rotates clockwise in FIG. 7 due to the biasing force (pulling force) from the biasing member 38 that forms the adjusting means 37. ing. However, the force from the adjusting means 37 mainly affects the rotation of the second member 46 and the support body 50 with respect to the first wearing tool 20, and affects the swing of the second member 46 with respect to the support body 50. It is a force that is difficult to give. Therefore, in the free rotation mode, the first member 41 and the second member 46 are separated from each other.
この自由回転モードでは、第1部材41に連動する第2装着具25は、第1装着具20に対して自由に回転することができる。したがって、筋力補助装置10の着用者は、第2装着具25の装着部26が装着された上腕を、第1回転軸線(アシスト軸線)d1を中心として、胴体に対して自由に回転させることができる。すなわち、着用者は、筋力補助装置10に拘束されることなく、屈曲運動及び伸展運動を行うことができる。
In this free rotation mode, the second mounting tool 25 interlocked with the first member 41 can freely rotate with respect to the first mounting tool 20. Therefore, the wearer of the muscle strength assisting apparatus 10 can freely rotate the upper arm, to which the mounting portion 26 of the second mounting tool 25 is mounted, with respect to the trunk around the first rotation axis (assist axis) d1. it can. That is, the wearer can perform a bending exercise and an extension exercise without being restrained by the muscle force assisting device 10.
次に、図8に示された回転制動モードでは、流体源32からアクチュエータ31内に流体が供給され、アクチュエータ31が短縮する。アクチュエータ31が短縮することにより、出力手段30は、第1揺動部材47aを引き寄せるよう、当該第1揺動部材47aに作用する。図8に示すように、アクチュエータ31から第1揺動部材47aに加えられた力は、第1部材41をなす回転ドラム42に向けて第1揺動部材47aを動作させる。図8に示すように、揺動部材47a,47bの摩擦体49によって形成された第2接触面46aが、回転ドラム42の外周面をなす摩擦層42aによって形成された第1接触面41aに当接する。摩擦体49と摩擦層42aとの摩擦力により、第2部材46が第1部材41を保持する。これにより、第2部材46と第1部材41との相対回転が規制され、結果として回転ドラム42及び出力軸76の回転が規制される。
Next, in the rotational braking mode shown in FIG. 8, the fluid is supplied from the fluid source 32 into the actuator 31, and the actuator 31 is shortened. When the actuator 31 is shortened, the output means 30 acts on the first swing member 47a so as to attract the first swing member 47a. As shown in FIG. 8, the force applied from the actuator 31 to the first swing member 47 a operates the first swing member 47 a toward the rotary drum 42 that forms the first member 41. As shown in FIG. 8, the second contact surface 46a formed by the friction body 49 of the swinging members 47a and 47b is in contact with the first contact surface 41a formed by the friction layer 42a forming the outer peripheral surface of the rotating drum 42. Touch. The second member 46 holds the first member 41 by the frictional force between the friction body 49 and the friction layer 42a. As a result, the relative rotation between the second member 46 and the first member 41 is restricted, and as a result, the rotation of the rotating drum 42 and the output shaft 76 is restricted.
この回転制動モードでは、第2装着具25が第1装着具20に対して第1回転軸線(アシスト軸線)d1を中心として一方向(図4における時計回り方向)に回転することが規制される。例えば、筋力補助装置10は、持ち上げた上腕を、その位置に維持することを補助し、上腕が下がってしまうことを効果的に抑制することができる。
In this rotational braking mode, the second wearing tool 25 is restricted from rotating with respect to the first wearing tool 20 in one direction (clockwise direction in FIG. 4) about the first rotation axis (assist axis) d1. . For example, the muscular strength assisting device 10 can assist in maintaining the lifted upper arm at the position, and can effectively suppress the upper arm from being lowered.
なお、第2部材46は、支持体50に支持されており、この支持体50は、調整手段37からの付勢力に抗することで第1装着具20に対して回転可能となっている。したがって、着用者は、図8に示された状態から、調整手段37の付勢力に抗して支持体50を回転させることで、上腕をさらに持ち上げることが可能である。すなわち、支持体50が、第1部材41及び第2部材46とともに、第1中間回転軸線d1aを中心として、図8の状態から図9の状態へ回転を行うことで、第2装着具25は第1装着具20に対して第1回転軸線(アシスト軸線)d1を中心として他方向(図4における反時計回り方向)に回転することができる。すなわち、回転制動モードにおいて、第2装着具25が第1装着具20に対して第1回転軸線(アシスト軸線)d1を中心として一方向(図4における反時計回り方向)に回転することが規制されるものの、第2装着具25が第1装着具20に対して第1回転軸線(アシスト軸線)d1を中心として他方向(図4における反時計回り方向)に回転することは許容される。
The second member 46 is supported by the support body 50, and the support body 50 is rotatable with respect to the first wearing tool 20 by resisting the urging force from the adjusting means 37. Therefore, the wearer can further lift the upper arm by rotating the support body 50 against the urging force of the adjusting means 37 from the state shown in FIG. That is, the support body 50 rotates together with the first member 41 and the second member 46 about the first intermediate rotation axis d1a from the state of FIG. 8 to the state of FIG. The first mounting tool 20 can rotate in the other direction (counterclockwise direction in FIG. 4) about the first rotation axis (assist axis) d1. That is, in the rotational braking mode, the second wearing tool 25 is restricted from rotating in one direction (counterclockwise direction in FIG. 4) around the first rotation axis (assist axis) d1 with respect to the first wearing tool 20. However, the second mounting tool 25 is allowed to rotate in the other direction (counterclockwise direction in FIG. 4) about the first rotation axis (assist axis) d1 with respect to the first mounting tool 20.
なお、自由回転モード及び回転制動モードに加えて、回転駆動モードをさらに追加してもよい。回転駆動モードでは、回転制動モードの状態から、アクチュエータ31をさらに短縮させる。これにより、調整手段37の付勢力に抗して、第1部材41及び第2部材46とともに支持体50を、第1中間回転軸線d1aを中心として回転させる。この動作にともなって、第2装着具25を第1装着具20に対して第1回転軸線d1を中心として他方向に回転させることができる。すなわち、回転駆動モードでは、第2装着具25を第1装着具20に対して相対移動させて、例えば、上腕を持ち上げることを補助することができる。
In addition to the free rotation mode and the rotation braking mode, a rotation drive mode may be further added. In the rotational drive mode, the actuator 31 is further shortened from the state of the rotational braking mode. Thereby, the support body 50 is rotated around the first intermediate rotation axis d1a together with the first member 41 and the second member 46 against the biasing force of the adjusting means 37. With this operation, the second mounting tool 25 can be rotated in the other direction around the first rotation axis d1 with respect to the first mounting tool 20. That is, in the rotational drive mode, it is possible to assist the lifting of the upper arm by moving the second mounting tool 25 relative to the first mounting tool 20, for example.
出力手段30の動作は、制御部13によって制御される。図1に示された例において、制御部13は、流体源32とともに、第1装着具20の中央フレーム21に支持されている。制御部13は、流体源32からアクチュエータ31への流体(例えば空気)の供給およびアクチュエータ31からの流体の排気を制御することで、アクチュエータ31の動作を制御する。
The operation of the output means 30 is controlled by the control unit 13. In the example shown in FIG. 1, the control unit 13 is supported by the central frame 21 of the first wearing tool 20 together with the fluid source 32. The control unit 13 controls the operation of the actuator 31 by controlling the supply of fluid (for example, air) from the fluid source 32 to the actuator 31 and the exhaust of the fluid from the actuator 31.
図10は、制御部13の機能構成を説明するためのブロック図である。制御部13は、筋力補助装置10に設けられたセンサ80に電気的に接続されており、センサ80からの信号に基づいてアシスト機構15の制御、とりわけアシスト機構15の出力手段30の制御を行う。ここで説明する筋力補助装置10において、制御部13は、センサ80での検出結果に基づき、出力手段30を動作させて第1装着具20および第2装着具25の相対動作の規制を開始する。すなわち、制御部13は、センサ80での検出結果に基づき筋力の補助を開始する。また、制御部13は、センサ80での検出結果に基づき、出力手段30を動作させて第1装着具20および第2装着具25の相対動作の規制を解除する。すなわち、制御部13は、センサ80での検出結果に基づき筋力の補助を停止する。
FIG. 10 is a block diagram for explaining a functional configuration of the control unit 13. The control unit 13 is electrically connected to a sensor 80 provided in the muscle force assisting apparatus 10, and controls the assist mechanism 15, particularly the output means 30 of the assist mechanism 15 based on a signal from the sensor 80. . In the muscle force assisting apparatus 10 described here, the control unit 13 operates the output unit 30 based on the detection result of the sensor 80 to start the regulation of the relative movement between the first wearing tool 20 and the second wearing tool 25. . That is, the control unit 13 starts assisting muscle strength based on the detection result of the sensor 80. Further, the control unit 13 operates the output unit 30 based on the detection result of the sensor 80 to release the restriction on the relative operation of the first wearing tool 20 and the second wearing tool 25. That is, the control unit 13 stops assisting muscle strength based on the detection result of the sensor 80.
センサ80は、第1装着具20及び第2装着具25の相対動作に関連した指標を得ることができる。とりわけ図示されたセンサ80は、第1装着具20及び第2装着具25のアシスト軸線d1を中心とする相対回転に関連した指標を得ることができる。具体的には、センサ80は、第1装着具20及び第2装着具25の相対変位、第1装着具20及び第2装着具25の相対速度、第1装着具20及び第2装着具25の相対加速度、及び、第1装着具20及び第2装着具25の相対ジャークの少なくとも一以上を検出する。ここで「ジャーク」は、加速度を時間で微分したものである。
The sensor 80 can obtain an index related to the relative movement of the first wearing tool 20 and the second wearing tool 25. In particular, the illustrated sensor 80 can obtain an index related to the relative rotation of the first wearing tool 20 and the second wearing tool 25 around the assist axis d1. Specifically, the sensor 80 includes a relative displacement between the first wearing tool 20 and the second wearing tool 25, a relative speed between the first wearing tool 20 and the second wearing tool 25, and the first wearing tool 20 and the second wearing tool 25. And at least one of the relative jerk of the first wearing tool 20 and the second wearing tool 25 is detected. Here, “jerk” is obtained by differentiating acceleration with respect to time.
このような指標を得るためのセンサ80の一例として、変位センサ、速度センサ、加速度センサを用いることができる。また、変位センサ、速度センサ、加速度センサ、ジャイロセンサのいずれか一以上の検出結果を演算することにより、第1装着具20及び第2装着具25の相対変位、第1装着具20及び第2装着具25の相対速度、第1装着具20及び第2装着具25の相対加速度、及び、第1装着具20及び第2装着具25の相対ジャークを特定することもできる。
As an example of the sensor 80 for obtaining such an index, a displacement sensor, a speed sensor, and an acceleration sensor can be used. Further, by calculating one or more detection results of any one of the displacement sensor, the speed sensor, the acceleration sensor, and the gyro sensor, the relative displacement of the first mounting tool 20 and the second mounting tool 25, the first mounting tool 20 and the second mounting tool. The relative speed of the mounting tool 25, the relative acceleration of the first mounting tool 20 and the second mounting tool 25, and the relative jerk of the first mounting tool 20 and the second mounting tool 25 can also be specified.
図3~図5に示された例において、センサ80は、第1装着具20の側方フレーム22の前方延出フレーム部22bによって支持されている。センサ80は、第1回転軸線d1に沿って出力軸部材76に外方から対面する位置に配置されている。センサ80は、出力軸部材76の回転動作を監視し、出力軸部材76の回転動作に関する指標を計測することができる。
3 to 5, the sensor 80 is supported by the front extension frame portion 22b of the side frame 22 of the first wearing tool 20. In the example shown in FIGS. The sensor 80 is disposed at a position facing the output shaft member 76 from the outside along the first rotation axis d1. The sensor 80 can monitor the rotation operation of the output shaft member 76 and measure an index related to the rotation operation of the output shaft member 76.
図3~図5に示されたセンサ80以外のセンサの具体例として、ポテンショメータを用いることができる。ポテンショメータにより、出力軸部材76の回転にともなって変動する抵抗値を測定し、電圧値から出力軸部材76の回転位置(回転角度)を算出することができる。すなわち、このポテンショメータを変位センサとして用いることができる。このポテンショメータは、図示された筋力補助装置10への一適用例として、出力軸部材76と、前方延出フレーム部22bに設けられた出力軸部材76を受けるための軸受固定部と、の間に配置することができる。なお、ポテンショメータから取得される電圧値の変化量や変化時間を測定および演算することで、第1装着具20および第2装着具25の相対加速度を特定することも可能である。この場合、ポテンショメータは、加速度センサとして利用されることになる。
As a specific example of a sensor other than the sensor 80 shown in FIGS. 3 to 5, a potentiometer can be used. By using a potentiometer, a resistance value that varies with the rotation of the output shaft member 76 can be measured, and the rotational position (rotation angle) of the output shaft member 76 can be calculated from the voltage value. That is, this potentiometer can be used as a displacement sensor. As an example of application of the potentiometer to the illustrated muscle force assisting apparatus 10, the potentiometer is provided between the output shaft member 76 and a bearing fixing portion for receiving the output shaft member 76 provided on the front extension frame portion 22b. Can be arranged. It is also possible to specify the relative acceleration of the first wearing tool 20 and the second wearing tool 25 by measuring and calculating the amount of change and the change time of the voltage value acquired from the potentiometer. In this case, the potentiometer is used as an acceleration sensor.
さらに他のセンサの具体例として、速度センサや加速度センサを、第1装着具20および第2装着具25にそれぞれ設けるようにしてもよい。第1装着具20および第2装着具25に設けられたセンサでの計測値を比較することで、第1装着具20および第2装着具25の相対速度や速度加速度を特定することができる。また、この例から、第1装着具20および第2装着具25のいずれかに設置されたセンサを省いても良い。この場合、第1装着具20および第2装着具25に設けられた一つのセンサが、当該センサが設けられた装着具と地面との相対速度や相対加速度を特定することができる。
Furthermore, as a specific example of another sensor, a speed sensor and an acceleration sensor may be provided in the first wearing tool 20 and the second wearing tool 25, respectively. By comparing the measurement values of the sensors provided on the first wearing tool 20 and the second wearing tool 25, the relative speed and the speed acceleration of the first wearing tool 20 and the second wearing tool 25 can be specified. Further, from this example, the sensor installed in either the first wearing tool 20 or the second wearing tool 25 may be omitted. In this case, one sensor provided in the first wearing tool 20 and the second wearing tool 25 can specify the relative speed and relative acceleration between the wearing tool provided with the sensor and the ground.
また、センサ80は、第1装着具20に対して第2装着具25を相対動作させようとする力に関連した指標、とりわけ図示された例においては、第1装着具20に対して第2装着具25を第1回転軸線d1を中心として相対回転させようとする力に関連した指標も検出することが可能である。センサ80によって監視される力としては、並進力や、モーメント及びトルク等の回転力を例示することができる。相対動作させるための力に関連した指標としては、並進力や回転力等の力の大きさそのものであってもよいし、着用者の筋電位や着用者の筋肉の隆起度合い等であってもよい。これらの指標によれば、直接的または間接的に、第1装着具20及び第2装着具25を相対動作させるための力の大きさを評価することができる。
In addition, the sensor 80 is an index related to a force for moving the second wearing tool 25 relative to the first wearing tool 20, particularly in the illustrated example, the second with respect to the first wearing tool 20. It is also possible to detect an index related to a force for relatively rotating the mounting tool 25 around the first rotation axis d1. Examples of the force monitored by the sensor 80 include a translational force and a rotational force such as a moment and a torque. The index related to the force for relative movement may be the magnitude of the force such as translational force or rotational force itself, or may be the myoelectric potential of the wearer or the degree of bulging of the wearer's muscle. Good. According to these indexes, the magnitude of the force for causing the first wearing tool 20 and the second wearing tool 25 to relatively move can be evaluated directly or indirectly.
このような指標の検出を可能とするセンサ80として、トルクセンサ等の力を検出するためのセンサ、変位センサ、速度センサ、加速度センサ、筋電計、フォトリフレクタ等を例示することができる。トルクセンサ等の力を検出するためのセンサをセンサ80として用いることで、第1装着具20及び第2装着具25を相対動作させるための並進力や回転力の大きさを直接的に評価することができる。変位センサ、速度センサ及び加速度センサからの出力を演算することによって、第1装着具20及び第2装着具25を相対動作させるための並進力や回転力等の力の大きさを評価することもできる。さらに、筋電計によれば、着用者の筋電位を検出することができ、フォトリフレクタによれば、着用者の筋肉の隆起の度合いを評価することができる。したがって、筋電計やフォトリフレクタによれば、第1装着具20及び第2装着具25を相対動作させるための並進力や回転力の大きさを間接的に評価することができる。
Examples of the sensor 80 that can detect such an index include a sensor for detecting force such as a torque sensor, a displacement sensor, a speed sensor, an acceleration sensor, an electromyograph, a photo reflector, and the like. By using a sensor for detecting a force such as a torque sensor as the sensor 80, the magnitude of the translational force and the rotational force for causing the first wearing tool 20 and the second wearing tool 25 to move relative to each other is directly evaluated. be able to. By calculating outputs from the displacement sensor, the speed sensor, and the acceleration sensor, it is possible to evaluate the magnitude of a force such as a translational force or a rotational force for causing the first mounting tool 20 and the second mounting tool 25 to move relative to each other. it can. Further, the electromyograph can detect the myoelectric potential of the wearer, and the photoreflector can evaluate the degree of the muscular bulge of the wearer. Therefore, according to the electromyograph or the photoreflector, the magnitude of the translational force or the rotational force for causing the first mounting tool 20 and the second mounting tool 25 to move relative to each other can be indirectly evaluated.
また、図示された筋力補助装置10は、力補助装置10の姿勢を検出する姿勢センサ81と、異常を検出する異常検出センサ82と、をさらに有している。制御部13は、姿勢センサ81及び異常検出センサ82に電気的に接続されており、姿勢センサ81及び異常検出センサ82からの信号に基づいてアシスト機構15の制御、とりわけアシスト機構15の出力手段30の制御を行う。図示された筋力補助装置10において、制御部13は、姿勢センサ81での検出結果に基づき、筋力の補助を開始するための条件、筋力の補助の供給を開始するための条件が満たされるべき時間の長さ、筋力の補助を停止するための条件等を変更することができる。また、図示された筋力補助装置10において、制御部13は、異常検出センサ82での検出結果に基づき、筋力の補助を停止することができる。
The illustrated muscle force assisting device 10 further includes a posture sensor 81 that detects the posture of the force assisting device 10 and an abnormality detection sensor 82 that detects an abnormality. The control unit 13 is electrically connected to the attitude sensor 81 and the abnormality detection sensor 82, and controls the assist mechanism 15 based on signals from the attitude sensor 81 and the abnormality detection sensor 82, particularly the output means 30 of the assist mechanism 15. Control. In the illustrated muscular strength assisting apparatus 10, the control unit 13 is based on the detection result of the posture sensor 81, and the time for starting the muscular strength assist and the condition for starting the muscular strength assist supply should be satisfied. It is possible to change the length, conditions for stopping the assistance of muscle strength, and the like. Further, in the illustrated muscle strength assisting apparatus 10, the control unit 13 can stop assisting muscle strength based on the detection result of the abnormality detection sensor 82.
姿勢センサ81は、筋力補助装置10の姿勢を直接的または間接的に検出するためのセンサである。筋力補助装置10の姿勢を検出することで、筋力補助装置10を着用した着用者の体勢を把握することができる。姿勢センサ81として、姿勢センサやジャイロセンサを用いることができる。ジャイロセンサは、上述したセンサ80としても使用され得る。図1及び図2に示すように、姿勢センサ81は、側方フレーム22の中央フレーム21に取り付けられている。姿勢センサ81は、第1装着具20の略中央に位置して、筋力補助装置10の姿勢を検出する。
The posture sensor 81 is a sensor for directly or indirectly detecting the posture of the muscle force assisting apparatus 10. By detecting the posture of the muscle force assisting device 10, the posture of the wearer wearing the muscle force assisting device 10 can be grasped. As the attitude sensor 81, an attitude sensor or a gyro sensor can be used. The gyro sensor can also be used as the sensor 80 described above. As shown in FIGS. 1 and 2, the attitude sensor 81 is attached to the central frame 21 of the side frame 22. The posture sensor 81 is positioned substantially at the center of the first wearing tool 20 and detects the posture of the muscle force assisting apparatus 10.
異常検出センサ82は、筋力補助装置10、筋力補助装置10の着用者、筋力補助装置10の周囲における異常の有無を検出するセンサである。異常検出センサ82として、着用者の筋電位を検出する筋電計、着用者の筋肉の隆起の度合いを検出するフォトリフレクタ、明るさを検出する光センサ、熱を検出する熱センサ、姿勢を検出する姿勢センサ、周囲物との距離を検出する距離センサ、筋力補助装置10の電源の状態を監視する電圧計や電流計、及び、流体源32の圧力状態を監視する圧力計等を例示することができる。また、異常検出センサ82は、二種類以上のセンサを含んでいてもよい。筋電計やフォトリフレクタからなる異常検出センサ82によれば、着用者の異常を検出することができる。光センサや熱センサからなる異常検出センサ82によれば、周囲環境の異常、例えば火炎の存在等を検出することができる。また、姿勢センサからなる異常検出センサ82によれば、筋力補助装置10の着用者の転倒等の異常を検出することができる。距離センサからなる異常検出センサ82によれば、着用者が周囲物に接近し過ぎている状態を検出することができる。電圧計、電流計または圧力計からなる異常検出センサ82によれば、筋力補助装置10自体の状態異常を検出することができる。
The abnormality detection sensor 82 is a sensor that detects the presence or absence of an abnormality in the vicinity of the muscle force assisting device 10, the wearer of the muscle force assisting device 10, and the muscle force assisting device 10. As the abnormality detection sensor 82, an electromyograph for detecting the wearer's myoelectric potential, a photo reflector for detecting the degree of the wearer's muscle elevation, a light sensor for detecting brightness, a heat sensor for detecting heat, and a posture detection A posture sensor that detects a distance from a surrounding object, a voltmeter or an ammeter that monitors a power supply state of the muscle force assisting apparatus 10, a pressure gauge that monitors a pressure state of the fluid source 32, and the like Can do. Moreover, the abnormality detection sensor 82 may include two or more types of sensors. According to the abnormality detection sensor 82 including an electromyograph or a photo reflector, the wearer's abnormality can be detected. According to the abnormality detection sensor 82 including an optical sensor and a thermal sensor, it is possible to detect an abnormality in the surrounding environment, for example, the presence of a flame. Moreover, according to the abnormality detection sensor 82 which consists of an attitude | position sensor, abnormality, such as a wearer's fall of the muscle force auxiliary | assistance apparatus 10, can be detected. According to the abnormality detection sensor 82 composed of a distance sensor, it is possible to detect a state in which the wearer is too close to the surrounding object. According to the abnormality detection sensor 82 including a voltmeter, an ammeter, or a pressure gauge, it is possible to detect an abnormal state of the muscle strength assisting apparatus 10 itself.
次に、制御部13が実施する制御処理について説明する。図11は、筋力補助力の供給に関連した制御部13による制御処理フローの一例を示している。以下、図11に示された制御処理フローに基づいて説明を行う。
Next, control processing performed by the control unit 13 will be described. FIG. 11 shows an example of a control processing flow by the control unit 13 related to the supply of muscle strength assisting force. Hereinafter, description will be made based on the control processing flow shown in FIG.
制御部13は、まず、第2装着具25の第1装着具20に対する相対位置が所定範囲内であるか否かを判断する(図11における工程S11)。第2装着具25の第1装着具20に対する相対位置は、センサ80で検出することができる。したがって、制御部13は、センサ80での検出結果に基づき、第1の判断を行う。
The control unit 13 first determines whether or not the relative position of the second mounting tool 25 with respect to the first mounting tool 20 is within a predetermined range (step S11 in FIG. 11). The relative position of the second mounting tool 25 with respect to the first mounting tool 20 can be detected by the sensor 80. Therefore, the control unit 13 makes the first determination based on the detection result of the sensor 80.
センサ80は、例えば、第2装着具25の第1装着具20に対する相対位置を次のようにして角度で特定することができる。図4に示すように、腕を体に沿って下げた状態での第2装着具25の第1装着具20に対する相対位置を0°とする。この状態から前方に移動した角度を正の値として特定する。例えば立ち上がった状態で腕を体から水平方向前方に伸ばした状態を90°として特定する。したがって、図4の状態から第2装着具25を第1装着具20に対して第1回転軸線d1を中心として他方向(図4での時計回り方向)に回転した角度を、正の値として、第2装着具25の第1装着具20に対する相対位置として表現する。
The sensor 80 can specify the relative position of the second wearing tool 25 with respect to the first wearing tool 20 by an angle as follows, for example. As shown in FIG. 4, the relative position of the second wearing tool 25 with respect to the first wearing tool 20 in a state where the arm is lowered along the body is set to 0 °. The angle moved forward from this state is specified as a positive value. For example, a state in which the arm is extended from the body in the horizontal direction while standing is specified as 90 °. Therefore, an angle obtained by rotating the second mounting tool 25 in the other direction (clockwise direction in FIG. 4) around the first rotation axis d1 with respect to the first mounting tool 20 from the state of FIG. 4 as a positive value. And expressed as a relative position of the second mounting tool 25 to the first mounting tool 20.
筋力補助力の供給を開始するにあたり満たされるべき第2装着具25の第1装着具20に対する相対位置の所定範囲は、筋力補助力の供給が必要になると考えられる着用者の体勢に基づいて決定され得る。すなわち、所定範囲は、筋力補助力の供給が必要とされる種々の体勢を着用者がとった場合における第2装着具25の第1装着具20に対する相対位置を含むように決定される。その一方で、筋力補助力の供給が不必要と考えられる体勢を着用者がとった場合における第2装着具25の第1装着具20に対する相対位置が含まれないように、所定範囲は決定され得る。このように相対位置が所定範囲内であることを筋力補助の要件とすることで、意図しない位置で筋力の補助を受けることを効果的に防止することができる。
The predetermined range of the relative position of the second wearing tool 25 to the first wearing tool 20 that should be satisfied when the supply of the muscle force assisting force is started is determined based on the posture of the wearer who is considered to be required to supply the muscle force assisting force. Can be done. That is, the predetermined range is determined so as to include the relative position of the second wearing tool 25 with respect to the first wearing tool 20 when the wearer takes various postures that require the supply of muscle strength assisting force. On the other hand, the predetermined range is determined so as not to include the relative position of the second wearing device 25 with respect to the first wearing device 20 when the wearer takes a posture that is considered unnecessary to supply the muscle force assisting force. obtain. By making the relative position within the predetermined range as a requirement for assisting muscle strength in this way, it is possible to effectively prevent assistance of muscle strength at an unintended position.
なお、図11では示していないが、制御部13は、姿勢センサ81の検出結果に基づき、工程S11で判断される所定範囲を変更するようにしてもよい。姿勢センサ81からの検出結果によれば、当該筋力補助装置10を着用した着用者の姿勢を特定することができる。筋力補助力の供給が必要とされる体勢、図示された例では、筋力補助力の供給が必要とされる上腕の位置は、筋力補助装置10を着用した着用者の姿勢に基づいて変わり得る。例えば、前屈みとなっている着用者が、筋力補助力を受けたいと考える上腕の位置と、背筋を伸ばして立ち上がった着用者が、筋力補助力を受けたいと考える上腕の位置は、ほぼ同じであって、水平方向よりも上方になると考えられる。その一方で、前屈み状態と立背筋を伸ばした状態との間で、着用者の背中の角度および背中に装着された第1装着具20の向きは変化する。このため、制御部13で判断される第2装着具25の第1装着具20に対する相対位置の所定範囲は、前屈み状態と立ち上がった状態との間で、第1装着具20の向きの変化分だけ補正をかけることが好ましいと言える。例えば、上述の角度設定に基づくと、背筋を伸ばした状態での所定範囲を100°以上130°以下に設定し、前屈み状態での所定範囲を110°以上140°以下に設定してもよい。このように、制御部13が、姿勢センサ81の検出結果に応じて所定範囲を調整することで、意図しない位置で筋力補助力が供給されることをより効果的に防止することができる。
Although not shown in FIG. 11, the control unit 13 may change the predetermined range determined in step S <b> 11 based on the detection result of the attitude sensor 81. According to the detection result from the posture sensor 81, the posture of the wearer wearing the muscular strength assisting device 10 can be specified. The posture in which the supply of the muscle force assisting force is required, and in the illustrated example, the position of the upper arm that is required to supply the muscle force assisting force can be changed based on the posture of the wearer wearing the muscle force assisting device 10. For example, the position of the upper arm where a bendable wearer wants to receive strength support is almost the same as the position of the upper arm where a wearer who stands up with his back stretched wants to receive strength support. Therefore, it is considered to be higher than the horizontal direction. On the other hand, the angle of the wearer's back and the direction of the first wearing tool 20 attached to the back change between the forward bent state and the state where the standing muscle is extended. For this reason, the predetermined range of the relative position of the second mounting tool 25 to the first mounting tool 20 determined by the control unit 13 is a change in the orientation of the first mounting tool 20 between the forward bent state and the standing state. It can be said that it is preferable to apply only correction. For example, based on the above-described angle setting, the predetermined range in a state where the back is stretched may be set to 100 ° to 130 °, and the predetermined range in the forward bent state may be set to 110 ° to 140 °. As described above, the control unit 13 can more effectively prevent the muscle force assisting force from being supplied at an unintended position by adjusting the predetermined range according to the detection result of the posture sensor 81.
第2装着具25の第1装着具20に対する相対位置が所定範囲外であると判断された場合(図11の工程S11の「No」)、例えば一定の時間が経過した後に、再度工程S11が実施され、第2装着具25の第1装着具20に対する相対位置が所定範囲内であるか否かが判断される(図11の工程S11)。
When it is determined that the relative position of the second mounting tool 25 with respect to the first mounting tool 20 is outside the predetermined range (“No” in step S11 in FIG. 11), for example, after a predetermined time has elapsed, the process S11 is performed again. It is implemented and it is judged whether the relative position with respect to the 1st mounting tool 20 of the 2nd mounting tool 25 is in a predetermined range (process S11 of FIG. 11).
第2装着具25の第1装着具20に対する相対位置が所定範囲外であると判断された場合(図11の工程S11の「Yes」)、次に、制御部13は、センサ80によって検出された第1装着具20及び第2装着具25のアシスト軸線(第1回転軸線)d1を中心とする相対回転に関連した指標が、一定期間に亘って所定の条件(「開始条件」)を満たすか否かを判断する(図11の工程S12)。
If it is determined that the relative position of the second wearing tool 25 with respect to the first wearing tool 20 is outside the predetermined range (“Yes” in step S11 in FIG. 11), then the control unit 13 is detected by the sensor 80. The index related to the relative rotation around the assist axis (first rotation axis) d1 of the first wearing tool 20 and the second wearing tool 25 satisfies a predetermined condition (“start condition”) over a certain period. Is determined (step S12 in FIG. 11).
開始条件は、着用者が筋力補助装置10を着用して実施しようとする作業に応じて決定されてもよい。開始条件は、筋力補助装置10の着用者が筋力補助力を要求する意思表示を表す動作を反映した条件であることが好ましい。また、この意思表示を表す動作が、着用者の他の取り得る動作と区別されることが好ましく、とりわけ着用者が筋力補助装置10を着用して実施する作業での動作と区別されることが好ましい。さらに、異常時における着用者の動作が開始条件を満たさないように、開始条件を設定しておくことが好ましい。例えば転倒時や緊急時における着用者の動作が開始条件の動作と区別され、転倒時や緊急時に、筋力補助装置10が自由回転モードに維持されて、着用者の動作が筋力補助装置10によって拘束されないようにすることが好ましい。
The start condition may be determined according to a work that the wearer intends to perform while wearing the muscle strength assisting device 10. It is preferable that the start condition is a condition reflecting an operation representing an intention display in which the wearer of the muscle strength assisting device 10 requests the muscle strength assisting force. Moreover, it is preferable that the operation | movement showing this intention display is distinguished from the other operation | movement which a wearer can take, and it is especially distinguished from the operation | movement in the operation | work which a wearer wears the muscular strength assistance apparatus 10 and implements. preferable. Furthermore, it is preferable to set the start condition so that the wearer's action at the time of abnormality does not satisfy the start condition. For example, the wearer's movement at the time of a fall or emergency is distinguished from the movement of the start condition, and at the time of a fall or emergency, the muscle strength assisting device 10 is maintained in the free rotation mode, and the wearer's motion is restrained by the muscle strength assisting device 10. It is preferable not to do so.
開始条件として、例えば、相対回転に関連した指標が、相対回転が停止している或いは相対回転を停止しようとしていることを示すこと、とすることができる。具体的には、第1装着具20及び第2装着具25の相対変位が所定値以下又は所定値未満であること、第1装着具20及び第2装着具25の相対速度が所定値以下又は所定値未満であること、第1装着具20及び第2装着具25の相対加速度が所定値以下又は所定値未満であること、第1装着具20及び第2装着具25の相対ジャークが所定値以下又は所定値未満であること、これらの条件の組み合わせ、或いは、これらの条件と他の条件との組み合わせを開始条件とすることができる。このような条件設定によれば、筋力補助装置10の着用者が、上腕の動きを停止して、その位置にて上腕の位置を保持する補助力を受けようとしていることを、検出することができる。また、この条件は、着用者にとっては、筋力補助力の供給を待つ行為であって、筋力の補助を受けようとする直接的な行動とも言える。したがって、意図した位置にて筋力補助力の供給を開始することが促進される。
As the start condition, for example, an indicator related to the relative rotation may indicate that the relative rotation is stopped or the relative rotation is stopped. Specifically, the relative displacement between the first wearing tool 20 and the second wearing tool 25 is a predetermined value or less or less than a predetermined value, and the relative speed between the first wearing tool 20 and the second wearing tool 25 is less than a predetermined value or It is less than a predetermined value, the relative acceleration of the first wearing tool 20 and the second wearing tool 25 is less than or less than a predetermined value, and the relative jerk of the first wearing tool 20 and the second wearing tool 25 is a predetermined value The start condition may be the following or less than a predetermined value, a combination of these conditions, or a combination of these conditions and other conditions. According to such a condition setting, it is possible to detect that the wearer of the muscle strength assisting apparatus 10 is about to receive the assisting force that stops the movement of the upper arm and holds the position of the upper arm at that position. it can. In addition, this condition is an act of waiting for the supply of the muscle strength assisting force for the wearer, and can also be said to be a direct action to receive the muscle strength assisting. Accordingly, it is facilitated to start supplying the muscle force assisting force at the intended position.
また、制御部13は、開始条件が一定期間に亘って継続して満たされるか否かを判断する。この一定期間は、意図せずに開始条件が満たされてしまうことを防止するために十分な時間に設定され得る。したがって、筋力補助装置10の着用者が、筋力補助装置10を着用して行おうとしている作業の内容等に応じて設定されるようにしてもよい。一定期間に亘り開始条件が満たされることを、筋力補助力の供給を開始するための要件とすることで、意図しない位置にて筋力の補助を受けることを効果的に防止することができる。
Also, the control unit 13 determines whether or not the start condition is continuously satisfied over a certain period. This certain period can be set to a time sufficient to prevent the start condition from being unintentionally satisfied. Therefore, the wearer of the muscular strength assisting device 10 may be set according to the contents of the work to be performed while wearing the muscular strength assisting device 10. By satisfying the start condition for a certain period of time as a requirement for starting the supply of the muscular strength assisting force, it is possible to effectively prevent the muscular strength from being received at an unintended position.
なお、図11では示していないが、制御部13は、姿勢センサ81の検出結果に基づき、工程S12で判断される開始条件や一定期間の長さを変更するようにしてもよい。筋力補助装置10を着用した着用者の動作のし易さは、姿勢に応じて変化する。とりわけ、筋力補助を受けようとする体勢での着用者の動作のし易さは、当該着用者の全般的な姿勢に応じても変化することが考えられる。例えば、立ち上がった状態で腕を持ち上げた位置に維持することは、しゃがんだ状態で腕を持ち上げた位置に維持することよりも容易である。したがって、姿勢センサ81での検出結果から着用者がしゃがんでいると判断された場合には、開始条件がみたされるべき一定期間の長さを短くするように変更するようにしてもよい。この場合、意図しない位置で筋力補助力の供給が開始される可能性を効果的に抑制したままとしながら、意図する体勢にて筋力補助力の供給を円滑に受けることが可能となる。
Although not shown in FIG. 11, the control unit 13 may change the start condition determined in step S <b> 12 and the length of a certain period based on the detection result of the attitude sensor 81. The ease of operation of the wearer wearing the muscular strength assisting device 10 changes according to the posture. In particular, it is conceivable that the ease of movement of the wearer in a posture to receive muscular strength assistance changes depending on the general posture of the wearer. For example, maintaining the arm in the raised position while standing is easier than maintaining the arm in the squatting position. Therefore, when it is determined from the detection result of the posture sensor 81 that the wearer is crouching, the length of a certain period in which the start condition should be satisfied may be changed. In this case, it is possible to smoothly receive the supply of the muscle force assisting force with the intended posture while effectively suppressing the possibility of starting the supply of the muscle force assisting force at an unintended position.
第1装着具20及び第2装着具25のアシスト軸線(第1回転軸線)d1を中心とする相対回転に関連した指標が、一定期間に亘って開始条件を満たしていないと判断された場合(図11の工程S12の「No」)、例えば一定の時間が経過した後に、第2装着具25の第1装着具20に対する相対位置が所定範囲内であるか否かを再度判断する(図11の工程S11)。その一方で、第1装着具20及び第2装着具25のアシスト軸線(第1回転軸線)d1を中心とする相対回転に関連した指標が、一定期間に亘って開始条件を満たしていると判断された場合(図11の工程S12の「Yes」)、筋力補助力の供給が開始される(図11の工程S13)。具体的な動作として、アクチュエータ31が短縮して、筋力補助装置10が自由回転モード(図7)から回転制動モード(図8)へと切り替わる。これにより、第2装着具25の第1装着具20に対する第1回転軸線(アシスト軸線)d1を中心とした一方向への回転が規制され、着用者は、上腕が下がってしまわないように上腕を支持する筋力補助力を筋力補助装置10から受ける。
When it is determined that the index related to the relative rotation around the assist axis (first rotation axis) d1 of the first wearing tool 20 and the second wearing tool 25 does not satisfy the start condition for a certain period ( For example, after a predetermined time has elapsed, it is determined again whether the relative position of the second mounting tool 25 with respect to the first mounting tool 20 is within a predetermined range (FIG. 11). Step S11). On the other hand, it is determined that the index related to the relative rotation around the assist axis (first rotation axis) d1 of the first wearing tool 20 and the second wearing tool 25 satisfies the start condition over a certain period. If it is performed (“Yes” in step S12 in FIG. 11), the supply of the muscle strength assisting force is started (step S13 in FIG. 11). As a specific operation, the actuator 31 is shortened, and the muscle force assisting apparatus 10 is switched from the free rotation mode (FIG. 7) to the rotation braking mode (FIG. 8). As a result, the rotation of the second wearing tool 25 in one direction around the first rotation axis (assist axis) d1 with respect to the first wearing tool 20 is restricted, and the wearer can prevent the upper arm from dropping. A muscle strength assisting force that supports the muscle strength is received from the muscle strength assisting device 10.
なお、図11に示された例では、解除条件が満たされることにより、筋力補助装置10による筋力補助が開始されるようになる。ただし、開始条件の充足を判断するための指標を提供するセンサ80以外に、姿勢センサ81や異常検出センサ82が筋力補助装置10に設けられている場合には、開始条件が満たされたとしても、姿勢センサ81や異常検出センサ82で異常等が検出されている際には、筋力補助が開始されないようにしてもよい。すなわち、姿勢センサ81や異常検出センサ82の検出結果から異常の発生が予想される場合には、筋力補助装置10を自由回転モードに維持して、着用者の動作を拘束しないようにしてもよい。
In the example shown in FIG. 11, muscle strength assistance by the muscle strength assisting device 10 is started when the release condition is satisfied. However, in addition to the sensor 80 that provides an index for determining whether or not the start condition is satisfied, if the posture sensor 81 and the abnormality detection sensor 82 are provided in the muscle force assisting device 10, even if the start condition is satisfied Further, when an abnormality or the like is detected by the posture sensor 81 or the abnormality detection sensor 82, the muscle strength assistance may not be started. That is, when an abnormality is predicted from the detection results of the posture sensor 81 or the abnormality detection sensor 82, the muscle force assisting device 10 may be maintained in the free rotation mode so as not to restrain the wearer's movement. .
筋電計やフォトリフレクタを異常検出センサ82として用いた場合、例えば、何かの力に抗するために筋力補助装置10の着用者が力を掛け続けている等の異常を検出することができる。また、光センサや熱センサを異常検出センサ82として用いた場合、周囲環境の異常、例えば火炎の存在等を検出することができる。また、姿勢センサやジャイロセンサを異常検出センサ82として用いた場合、筋力補助装置10の着用者の転倒等の異常を検出することができる。距離センサを異常検出センサ82として用いた場合、着用者が周囲物に接近し過ぎている状態を検出することができる。電圧計や電流計を異常検出センサ82として用いた場合、筋力補助装置10の電源状態に問題があることを検出することができる。圧力計を異常検出センサ82として用いた場合、筋力補助装置10の流体源32に問題があることを検出することができる。
When an electromyograph or a photo reflector is used as the abnormality detection sensor 82, for example, it is possible to detect an abnormality such as a wearer of the muscle strength assisting device 10 continuously applying force to resist some force. . Further, when an optical sensor or a heat sensor is used as the abnormality detection sensor 82, it is possible to detect an abnormality in the surrounding environment, for example, the presence of a flame. In addition, when a posture sensor or a gyro sensor is used as the abnormality detection sensor 82, it is possible to detect an abnormality such as the wearer's fall of the muscle force assisting apparatus 10. When the distance sensor is used as the abnormality detection sensor 82, it is possible to detect a state in which the wearer is too close to the surrounding object. When a voltmeter or an ammeter is used as the abnormality detection sensor 82, it can be detected that there is a problem in the power supply state of the muscle strength assisting apparatus 10. When a pressure gauge is used as the abnormality detection sensor 82, it can be detected that there is a problem with the fluid source 32 of the muscle force assisting apparatus 10.
筋力補助力の供給が開始されると、制御部13は、次に、センサ80から出力された情報に基づき、筋力補助力を解除すべきか否かを判断する(図11の工程S14)。解除条件は、着用者が筋力補助装置10を着用して実施しようとする作業に応じて決定されてもよい。解除条件は、筋力補助装置10の着用者が筋力補助力の解除を要求する意思表示を表す動作を反映した条件であることが好ましい。また、この意思表示を表す動作が、着用者の他の取り得る動作と区別されることが好ましく、とりわけ着用者が筋力補助装置10を着用して実施する作業での動作と区別されることが好ましい。
When the supply of the muscle force assisting force is started, the control unit 13 next determines whether or not the muscle force assisting force should be released based on the information output from the sensor 80 (step S14 in FIG. 11). The release condition may be determined according to the work that the wearer intends to perform while wearing the muscular strength assisting device 10. The release condition is preferably a condition that reflects an action representing an intention display in which the wearer of the muscle strength assisting device 10 requests to cancel the strength assisting force. Moreover, it is preferable that the operation | movement showing this intention display is distinguished from the other operation | movement which a wearer can take, and it is especially distinguished from the operation | movement in the operation | work which a wearer wears the muscular strength assistance apparatus 10 and implements. preferable.
第1の例として、制御部13は、第1装着具20に対する第2装着具25の一方向への相対動作が規制されている状態において、第1装着具20に対する第2装着具25の他方向への相対動作に関連した指標が解除条件を満たすか否かを判断するようにしてもよい。具体的には、第1装着具20及び第2装着具25の相対変位が所定値以上である又は所定値を超えること、第1装着具20及び第2装着具25の相対速度が所定値以上である又は所定値を超えること、第1装着具20及び第2装着具25の相対加速度が所定値以上である又は所定値を超えること、第1装着具20及び第2装着具25の相対ジャークが所定値以上である又は所定値を超えること、これらの条件の組み合わせ、或いは、これらの条件と他の条件との組み合わせを解除条件とすることができる。
As a first example, in a state where the relative movement of the second mounting tool 25 in one direction with respect to the first mounting tool 20 is restricted, the control unit 13 is not limited to the second mounting tool 25 with respect to the first mounting tool 20. It may be determined whether or not an indicator related to the relative movement in the direction satisfies the release condition. Specifically, the relative displacement between the first wearing tool 20 and the second wearing tool 25 is greater than or equal to a predetermined value, or the relative speed between the first wearing tool 20 and the second wearing tool 25 is greater than or equal to a predetermined value. Or exceeding a predetermined value, the relative acceleration of the first mounting tool 20 and the second mounting tool 25 being greater than or equal to a predetermined value, or the relative jerk of the first mounting tool 20 and the second mounting tool 25 Is greater than or equal to a predetermined value or exceeds a predetermined value, a combination of these conditions, or a combination of these conditions with other conditions can be used as the release condition.
図示された筋力補助装置10では、上述したように、図8に示された回転制動モードにおいて、第2装着具25の第1装着具20に対する第1回転軸線d1を中心とした一方向(図4における時計回り方向)への相対回転が規制されているが、第2装着具25の第1装着具20に対する第1回転軸線d1を中心とした他方向(図4における反時計回り方向)への相対回転は許容されている。したがって、着用者は、筋力補助力を解除したい意思表示として、調整手段37の付勢力に抗して上腕を持ち上げる動作を行うことができる。そして、センサ80で検出される相対変位等が所定値以上または所定値を超えることを解除条件とすることで、意図せず解除条件が満たされ、これにより、意図せず筋力補助力が解除されてしまうことを効果的に防止することができる。
In the illustrated muscle force assisting device 10, as described above, in the rotational braking mode shown in FIG. 8, the second wearing tool 25 is unidirectionally centered on the first rotation axis d 1 with respect to the first wearing tool 20 (see FIG. 4 is restricted relative to the first mounting tool 20 in the other direction (counterclockwise direction in FIG. 4) around the first rotation axis d1 with respect to the first mounting tool 20. Relative rotation is allowed. Therefore, the wearer can perform an operation of lifting the upper arm against the urging force of the adjusting means 37 as an intention display for canceling the strength assisting force. Then, the release condition is satisfied unintentionally by setting the relative displacement detected by the sensor 80 to be a predetermined value or more or exceeding a predetermined value, thereby unintentionally canceling the muscle force assisting force. Can be effectively prevented.
第2の例として、制御部13は、第1装着具20に対する第2装着具25の一方向への相対動作が規制されている状態において、第1装着具20に対して第2装着具25を他方向へ相対動作させようとする力に関連した指標が解除条件を満たすか否かを判断するようにしてもよい。具体的には、第1装着具20に対して第2装着具25を他方向へ相対動作させようとする並進力や回転力等が所定値以上である又は所定値を超えること、第1装着具20に対して第2装着具25を他方向へ相対動作させようとする筋電位が所定値以上である又は所定値を超えること、第1装着具20に対して第2装着具25を他方向へ相対動作させようとする筋肉の隆起度合いを示す指標が所定値以上である又は所定値を超えること、これらの条件の組み合わせ、或いは、これらの条件と他の条件との組み合わせを解除条件とすることができる。
As a second example, the controller 13 controls the second mounting tool 25 relative to the first mounting tool 20 in a state where relative movement of the second mounting tool 25 relative to the first mounting tool 20 in one direction is restricted. It may be determined whether or not an index related to a force that is intended to cause the relative movement in the other direction satisfies the release condition. Specifically, a translational force, a rotational force or the like that causes the second mounting tool 25 to move relative to the first mounting tool 20 in the other direction is greater than or equal to a predetermined value or exceeds the predetermined value. The myoelectric potential for moving the second mounting tool 25 relative to the tool 20 in the other direction is greater than or equal to a predetermined value or exceeds the predetermined value. An index indicating the degree of bulging of the muscle to be relatively moved in the direction is a predetermined value or more or exceeds a predetermined value, a combination of these conditions, or a combination of these conditions and other conditions as a release condition can do.
図示された筋力補助装置10では、図8に示された回転制動モードにおいて、第2装着具25の第1装着具20に対する第1回転軸線d1を中心とした一方向への相対回転が規制されているが、第2装着具25の第1装着具20に対する第1回転軸線d1を中心とした他方向への相対回転は許容されている。したがって、着用者は、筋力補助力を解除したい意思表示として、調整手段37の付勢力に抗するように力を加えて、実際に上腕を持ち上げる動作を行うことができる。このような意図的な動作を解除条件とすることで、すなわち、相対動作させようとする力に関する指標が所定値以上または所定値を超えることを解除条件とすることで、意図せず解除条件が満たされ、これにより、意図せず筋力の補助が解除されてしまうことを効果的に防止することができる。
In the illustrated muscle force assisting device 10, in the rotational braking mode shown in FIG. 8, relative rotation of the second mounting tool 25 relative to the first mounting tool 20 in one direction around the first rotation axis d <b> 1 is restricted. However, relative rotation of the second mounting tool 25 in the other direction around the first rotation axis d1 with respect to the first mounting tool 20 is allowed. Therefore, the wearer can perform an operation of actually lifting the upper arm by applying a force against the urging force of the adjusting means 37 as an intention display to release the muscular strength assisting force. By setting such an intentional movement as a release condition, that is, by setting a release condition that an index related to the force to be relatively moved is a predetermined value or more or exceeding a predetermined value, the release condition is unintentionally set. It is satisfied, thereby effectively preventing the assistance of the muscular strength from being released unintentionally.
なお、第1の例における相対動作に関連した指標が満たされることと、第2の例における相対動作させようとする力に関連した指標が満たされることと、の両方を解除条件としてもよい。すなわち、制御部13は、第1装着具20に対する第2装着具25の一方向への相対動作が規制されている状態において、第1装着具20に対する第2装着具25の他方向への相対動作に関連した指標と、第1装着具20に対して第2装着具25を他方向へ相対動作させようとする力に関連した指標と、の両方が所定の解除条件を満たすと判断した場合、第1装着具20に対する第2装着具25の一方向への相対動作の規制を解除するようにしてもよい。このような例によれば、意図せず解除条件が満たされ、これにより、意図せず筋力の補助が解除されてしまうことをより効果的に防止することができる。
It should be noted that both the satisfaction of the index related to the relative motion in the first example and the satisfaction of the index related to the force for the relative motion in the second example may be set as the release condition. That is, the control unit 13 is configured such that the relative movement of the second mounting tool 25 relative to the first mounting tool 20 in the other direction is restricted in a state where the relative movement of the second mounting tool 25 relative to the first mounting tool 20 is restricted. When it is determined that both the index related to the movement and the index related to the force to move the second mounting tool 25 relative to the first mounting tool 20 in the other direction satisfy the predetermined release condition The restriction of the relative movement of the second wearing tool 25 in one direction with respect to the first wearing tool 20 may be released. According to such an example, it is possible to more effectively prevent an unintentional release of muscle strength assistance by unintentionally satisfying a release condition.
次に第3の例として、制御部13は、第1装着具20に対する第2装着具25の一方向への相対動作が規制されている状態において、第1装着具20に対して第2装着具25を一方向へ相対動作させようとする力に関連した指標が解除条件を満たすか否かを判断するようにしてもよい。具体的には、第1装着具20に対して第2装着具25を一方向へ相対動作させようとする並進力や回転力等が所定値以上である又は所定値を超えること、第1装着具20に対して第2装着具25を一方向へ相対動作させようとする筋電位が所定値以上である又は所定値を超えること、第1装着具20に対して第2装着具25を一方向へ相対動作させようとする筋肉の隆起度合いを示す指標が所定値以上である又は所定値を超えること、第1装着具20に対して第2装着具25を一方向へ相対動作させようとする力が第1装着具20に対する第2装着具25の一方向への相対動作を規制する力よりも大きくなること、これらの条件の組み合わせ、或いは、これらの条件と他の条件との組み合わせを解除条件とすることができる。
Next, as a third example, the control unit 13 performs the second mounting on the first mounting tool 20 in a state where the relative movement of the second mounting tool 25 in one direction with respect to the first mounting tool 20 is restricted. You may make it judge whether the parameter | index relevant to the force which is going to carry out the relative operation | movement of the tool 25 to one direction satisfy | fills cancellation | release conditions. Specifically, a translational force, a rotational force, or the like that attempts to move the second wearing tool 25 relative to the first wearing tool 20 in one direction is greater than or equal to a predetermined value, When the myoelectric potential to move the second mounting tool 25 relative to the tool 20 in one direction is greater than or equal to a predetermined value or exceeds the predetermined value, the second mounting tool 25 is When the index indicating the degree of bulging of the muscle to be relatively moved in the direction is equal to or greater than a predetermined value or exceeds the predetermined value, the second wearing tool 25 is caused to move relative to the first wearing tool 20 in one direction. The force to be larger than the force that restricts the relative movement of the second wearing tool 25 in one direction with respect to the first wearing tool 20, a combination of these conditions, or a combination of these conditions and other conditions. It can be a release condition.
筋力補助の解除は、第1装着具20に対して第2装着具25を一方向に相対動作させることを可能にする。筋力補助装置10の着用者は、第2装着具25を第1装着具20に対して他方向へ動作させて上腕を降ろす際に、筋力補助の解除を必要とする。したがって、第1装着具20に対して第2装着具25を一方向に相対動作させるための力を加えることは、筋力補助を解除したいとする意図に直結した行為である。したがって、このような意図的な動作を解除条件とすることで、すなわち、第2装着具25を第1装着具20に対して一方向に相対動作させようとする力に関する指標が所定値以上または所定値を超えることを解除条件とすることで、意図せず解除条件が満たされることを効果的に防止することができる。これにより、意図せず筋力補助が解除されてしまうことを効果的に防止し、且つ、意図した際に正確に筋力補助を解除することができる。
The release of the muscular strength assist enables the second wearing tool 25 to move relative to the first wearing tool 20 in one direction. The wearer of the muscle strength assisting device 10 needs to release the muscle strength assist when moving the second wearing tool 25 in the other direction with respect to the first wearing tool 20 and lowering the upper arm. Therefore, applying a force for causing the second wearing tool 25 to move relative to the first wearing tool 20 in one direction is an action directly linked to the intention of releasing the muscle strength assistance. Therefore, by setting such an intentional movement as a release condition, that is, an index related to a force for moving the second wearing tool 25 relative to the first wearing tool 20 in one direction is a predetermined value or more. By setting the condition that exceeds a predetermined value as the cancellation condition, it is possible to effectively prevent the cancellation condition from being unintentionally satisfied. Accordingly, it is possible to effectively prevent unintentional release of muscle strength assistance, and to accurately cancel muscle strength assistance when intended.
なお、図11では示していないが、制御部13は、姿勢センサ81の検出結果に基づき、工程S14で判断される解除条件を変更するようにしてもよい。筋力補助装置10を着用した着用者の動作のし易さは、姿勢に応じて変化する。例えば、立ち上がった状態で腕を動かすことは、しゃがんだ状態で腕を動かすことよりも容易である。したがって、姿勢センサ81での検出結果から着用者がしゃがんでいると判断された場合には、解除条件を変更する、具体的には例示した所定値を低下させるようにしてもよい。この場合、意図しない位置で筋力補助力の供給が解除される可能性を効果的に抑制したままとしながら、意図する体勢にて筋力補助力の供給を円滑に解除することが可能となる。
Although not shown in FIG. 11, the control unit 13 may change the cancellation condition determined in step S <b> 14 based on the detection result of the attitude sensor 81. The ease of operation of the wearer wearing the muscular strength assisting device 10 changes according to the posture. For example, moving an arm while standing is easier than moving an arm while squatting. Therefore, when it is determined from the detection result of the posture sensor 81 that the wearer is crouching, the release condition may be changed, specifically, the exemplified predetermined value may be reduced. In this case, it is possible to smoothly cancel the supply of the muscle force assisting force with the intended posture while effectively suppressing the possibility that the supply of the muscle force assisting force is released at an unintended position.
センサ80から出力された指標が解除条件を満たしていないと判断された場合(図11の工程S14の「No」)、例えば一定の時間が経過した後に、センサ80から出力された指標が解除条件を満たすか否かを再度判断する(図11の工程S14)。その一方で、センサ80から出力された指標が解除条件を満たしていると判断された場合(図11の工程S14の「Yes」)、筋力補助力の供給が停止する(図11の工程S15)。具体的な動作として、アクチュエータ31が伸張して、筋力補助装置10が回転制動モード(図8)から自由回転モード(図7)へと切り替わる。これにより、第2装着具25の第1装着具20に対する第1回転軸線(アシスト軸線)d1を中心とした一方向への回転規制が解除され、着用者は、上腕を自由に動かすことが可能となる。
If it is determined that the index output from the sensor 80 does not satisfy the release condition (“No” in step S14 in FIG. 11), for example, the index output from the sensor 80 after the fixed time has elapsed It is determined again whether or not the condition is satisfied (step S14 in FIG. 11). On the other hand, when it is determined that the index output from the sensor 80 satisfies the release condition (“Yes” in step S14 in FIG. 11), the supply of muscle strength assisting force is stopped (step S15 in FIG. 11). . As a specific operation, the actuator 31 is extended, and the muscle force assisting apparatus 10 is switched from the rotation braking mode (FIG. 8) to the free rotation mode (FIG. 7). Thereby, the rotation restriction | limiting to the one direction centering on the 1st rotation axis (assist axis) d1 with respect to the 1st mounting tool 20 of the 2nd mounting tool 25 is cancelled | released, and a wearer can move an upper arm freely. It becomes.
なお、図11では示していないが、制御部13は、第1装着具20に対する第2装着具25の一方向への相対動作が規制されている状態において、異常検出センサ82が異常を検出した場合、第1装着具20に対する第2装着具25の一方向への相対動作の規制を解除するようにしてもよい。筋電計やフォトリフレクタを異常検出センサ82として用いた場合、例えば、何かの力に抗するために筋力補助装置10の着用者が力を掛け続けている等の異常を検出することができる。また、光センサや熱センサを異常検出センサ82として用いた場合、周囲環境の異常、例えば火炎の存在等を検出することができる。また、姿勢センサやジャイロセンサを異常検出センサ82として用いた場合、筋力補助装置10の着用者の転倒等の異常を検出することができる。距離センサを異常検出センサ82として用いた場合、着用者が周囲物に接近し過ぎている状態を検出することができる。制御部13は、例えば異常検出センサ82がこれらの異常が発生した場合に、筋力補助力の供給を停止する。これにより、筋力補助装置10の着用者は、筋力補助装置10からの拘束を解除された状態で、異常に対処することができる。
Although not shown in FIG. 11, the control unit 13 detects an abnormality in the abnormality detection sensor 82 in a state where the relative movement of the first wearing tool 20 in one direction with respect to the second wearing tool 25 is restricted. In this case, the restriction on the relative movement of the second wearing tool 25 in one direction with respect to the first wearing tool 20 may be released. When an electromyograph or a photo reflector is used as the abnormality detection sensor 82, for example, it is possible to detect an abnormality such as a wearer of the muscle strength assisting device 10 continuously applying force to resist some force. . Further, when an optical sensor or a heat sensor is used as the abnormality detection sensor 82, it is possible to detect an abnormality in the surrounding environment, for example, the presence of a flame. In addition, when a posture sensor or a gyro sensor is used as the abnormality detection sensor 82, it is possible to detect an abnormality such as the wearer's fall of the muscle force assisting apparatus 10. When the distance sensor is used as the abnormality detection sensor 82, it is possible to detect a state in which the wearer is too close to the surrounding object. For example, when the abnormality detection sensor 82 generates these abnormalities, the control unit 13 stops supplying the muscle force assisting force. Thereby, the wearer of the muscular strength assisting device 10 can deal with the abnormality in a state where the restraint from the muscular strength assisting device 10 is released.
その一方で、筋力補助装置10に異常が発見され、筋力補助装置10の安定した動作が期待できないことが、異常検出センサ82の検出結果から予測される場合には、筋力補助力の供給を維持した方が好ましいこともある。例えば、筋力補助装置10のアシスト機構15を駆動するための電源や流体圧を十分に確保できないことが、電圧計、電流計、圧力計等からなる異常検出センサ82の検出結果から予想される場合である。異常検出センサ82がこのような異常を検出した場合には、解除条件が満されたとしても、第1装着具20に対する第2装着具25の相対動作の規制を維持するようにしてもよい。すなわち、解除条件が満たされても、異常検出センサ82が異常を検出している場合には、アシスト機構15からの筋力補助が維持されるようにしてもよい。
On the other hand, if an abnormality is discovered in the muscle force assisting device 10 and it is predicted from the detection result of the abnormality detecting sensor 82 that stable operation of the muscle force assisting device 10 cannot be expected, the supply of the muscle force assisting force is maintained. It may be preferable to do so. For example, when it is predicted from the detection result of the abnormality detection sensor 82 including a voltmeter, an ammeter, a pressure gauge, or the like that a sufficient power source or fluid pressure for driving the assist mechanism 15 of the muscle force assisting device 10 cannot be secured. It is. When the abnormality detection sensor 82 detects such an abnormality, even if the release condition is satisfied, the restriction on the relative movement of the second wearing tool 25 with respect to the first wearing tool 20 may be maintained. That is, even if the release condition is satisfied, if the abnormality detection sensor 82 detects an abnormality, the muscle strength assistance from the assist mechanism 15 may be maintained.
以上のような一実施の形態において、制御部13は、センサ80によって検出された指標が一定期間に亘り所定条件を満たすと判断した場合、第1装着具20に対する第2装着具25の一の向きへの相対動作を規制するよう、アシスト機構15を制御するようになる。すなわち、本実施の形態によれば、アシスト機構15から筋力補助力を供給するには、一定期間に亘って所定条件を満たすことが要件となる。したがって、所定期間を十分な長さに設定することで、意図しない位置にて筋力補助力の供給が開始されることを効果的に防止することができる。また、動作の制限を受けていない状態で、筋力補助力を受けるべき所望の体勢を取ることができる。これらにより、本実施の形態によれば、意図しない位置で筋力補助力の供給が開始されることを効果的に防止して、所望とする体勢にて筋力補助力を受けることを安定して達成することができる。
In one embodiment as described above, when the control unit 13 determines that the index detected by the sensor 80 satisfies a predetermined condition over a certain period, one of the second mounting tools 25 with respect to the first mounting tool 20. The assist mechanism 15 is controlled so as to regulate the relative movement in the direction. That is, according to the present embodiment, in order to supply the muscle force assisting force from the assist mechanism 15, it is necessary to satisfy a predetermined condition over a certain period. Therefore, by setting the predetermined period to a sufficient length, it is possible to effectively prevent the supply of the muscle force assisting force from being started at an unintended position. Moreover, the desired posture which should receive a muscular strength assistance force can be taken in the state which has not received the restriction | limiting of operation | movement. As a result, according to the present embodiment, it is possible to effectively prevent the supply of the muscle force assisting force from being started at an unintended position and stably receive the muscle force assisting force at a desired posture. can do.
また、本実施の形態において、センサ80は、第1装着具20及び第2装着具25の相対変位、第1装着具20及び第2装着具25の相対速度、第1装着具20及び第2装着具25の相対加速度、及び、第1装着具20及び第2装着具25の相対ジャークの一以上を検出する。着用者は、第1装着具20に対する第2装着具25の相対変位、相対速度、相対加速度、相対ジャーク等を容易に変化させることができる。したがって、着用者が、筋力の補助を受けたい場合、筋力補助を開始するための意思表示を容易に行うことができる。これにより、意図する位置にて筋力補助力の供給が精度良く開始するようにすることができる。
In the present embodiment, the sensor 80 includes the relative displacement between the first wearing tool 20 and the second wearing tool 25, the relative speed between the first wearing tool 20 and the second wearing tool 25, the first wearing tool 20 and the second wearing tool 25. The relative acceleration of the mounting tool 25 and one or more of the relative jerk of the first mounting tool 20 and the second mounting tool 25 are detected. The wearer can easily change the relative displacement, the relative speed, the relative acceleration, the relative jerk, and the like of the second wearing tool 25 with respect to the first wearing tool 20. Therefore, when a wearer wants to receive assistance of muscular strength, the intention display for starting muscular strength assistance can be performed easily. Thereby, supply of a muscular strength auxiliary force can be started with high accuracy at an intended position.
さらに、本実施の形態において、センサは、第2装着具25の第1装着具20に対する相対位置が所定範囲内に位置すると判断し、且つ、センサ80によって検出された指標が一定期間に亘り所定条件を満たすと判断した場合、第1装着具20に対する第2装着具25の一の向きへの相対動作を規制するようになる。筋力補助が必要とされるのは、通常、第2装着具25の第1装着具20に対する相対位置が所定範囲内となっている場合である。したがって、第2装着具25の第1装着具20に対する相対位置が所定範囲内となっていることを、筋力補助を開始する条件とすることで、意図しない位置にて筋力補助が開始されることをより効果的に防止することができる。
Further, in the present embodiment, the sensor determines that the relative position of the second wearing tool 25 with respect to the first wearing tool 20 is within a predetermined range, and the index detected by the sensor 80 is predetermined over a predetermined period. When it is determined that the condition is satisfied, the relative movement of the second wearing tool 25 in one direction with respect to the first wearing tool 20 is restricted. The muscular strength assistance is usually required when the relative position of the second wearing tool 25 with respect to the first wearing tool 20 is within a predetermined range. Accordingly, by setting the relative position of the second wearing tool 25 relative to the first wearing tool 20 within a predetermined range as a condition for starting muscle strength assistance, muscle strength assistance is started at an unintended position. Can be prevented more effectively.
さらに、本実施の形態において、筋力補助装置10は、筋力補助装置10の姿勢を検出する姿勢センサ81をさらに備えている。そして、制御部13は、姿勢センサ81の検出結果に応じて所定範囲を調整する。筋力補助を必要とする着用者の体勢は、当該着用者の全体的な姿勢に応じて変化する。すなわち、筋力補助が必要となる第1装着具20及び第2装着具25の相対位置は、筋力補助装置10の姿勢に応じて変化する。したがって、筋力補助を開始する条件としての第2装着具25が第1装着具20に対して位置すべき所定範囲を、姿勢センサ81で検出された筋力補助装置10の姿勢を考慮して決定することにより、意図しない位置にて筋力補助が開始されることをより効果的に防止することができ、且つ、意図した場合に筋力補助力の供給をより確実に開始することができる。
Furthermore, in the present embodiment, the muscle force assisting apparatus 10 further includes a posture sensor 81 that detects the posture of the muscle force assisting device 10. Then, the control unit 13 adjusts the predetermined range according to the detection result of the attitude sensor 81. The posture of the wearer who needs the muscular strength assist changes depending on the overall posture of the wearer. That is, the relative positions of the first wearing tool 20 and the second wearing tool 25 that require muscle strength assistance change according to the posture of the muscle strength assisting apparatus 10. Therefore, the predetermined range in which the second wearing tool 25 should be positioned with respect to the first wearing tool 20 as a condition for starting muscle strength assistance is determined in consideration of the posture of the muscle force assisting device 10 detected by the posture sensor 81. As a result, it is possible to more effectively prevent muscular power assistance from being started at an unintended position, and more reliably start the supply of muscular power assistance when intended.
さらに、本実施の形態において、筋力補助装置10は、筋力補助装置10の姿勢を検出する姿勢センサをさらに備えている。そして、制御部13は、姿勢センサ81の検出結果に応じて開始条件及び開始条件が満たされる期間の長さの少なくとも一方を調整する。筋力補助を必要とする体勢での着用者の動作のし易さは、当該着用者の全体的な姿勢に応じて変化する。すなわち、筋力補助が必要とされる状態での第1装着具20および第2装着具25の相対動作のし易さは、筋力補助装置10の姿勢に応じて変化する。したがって、筋力補助を開始する条件としての第1装着具20及び第2装着具25の相対動作の条件並びに当該条件を満たすべき期間の長さを、姿勢センサ81で検出された筋力補助装置10の姿勢を考慮して決定することにより、意図しない位置にて筋力補助が開始されることをより効果的に防止することができ、且つ、意図した場合に筋力補助をより確実に開始することができる。加えて、筋力補助装置10の着用者が転倒等してしまった場合等に、筋力補助力の供給が開始されないようにすることもできる。
Furthermore, in the present embodiment, the muscle force assisting device 10 further includes a posture sensor that detects the posture of the muscle force assisting device 10. And the control part 13 adjusts at least one of the length of the period when the start condition and the start condition are satisfy | filled according to the detection result of the attitude | position sensor 81. FIG. The ease of movement of the wearer in a posture requiring muscular strength assistance varies depending on the overall posture of the wearer. That is, the ease of relative movement of the first wearing tool 20 and the second wearing tool 25 in a state where muscle strength assistance is required varies depending on the posture of the muscle strength assisting apparatus 10. Therefore, the condition of the relative strength of the first wearing tool 20 and the second wearing tool 25 as a condition for starting muscle strength assistance and the length of the period in which the condition should be satisfied are detected by the posture sensor 81. By determining the position in consideration of the posture, it is possible to more effectively prevent the start of the muscle strength assistance at an unintended position, and it is possible to more reliably start the muscle strength assistance when intended. . In addition, when the wearer of the muscle strength assisting apparatus 10 falls or the like, the supply of the muscle strength assisting force can be prevented from being started.
以上のような一実施の形態において、制御部13は、第1装着具20に対する第2装着具25の一の向きへの相対動作が規制されている状態において、第1装着具20に対する第2装着具25の一の向きとは逆の向きとなる他の向きへの相対動作に関連した指標および第1装着具20に対して第2装着具25を他の向きへ相対動作させようとする力に関連した指標の少なくとも一方が所定の解除条件を満たすと判断した場合、第1装着具20に対する第2装着具25の一の向きへの相対動作の規制を解除する。すなわち、本実施の形態によれば、筋力補助により動作を規制されている向きとは逆向きの動作に関連した指標、及び、筋力補助により動作を規制されている向きとは逆向きに動作しようとする力に関連した指標の少なくとも一方が所定の解除条件を満たす場合に、筋力補助が解除される。筋力補助力を受けている状態において、筋力補助力により動作を規制されている向きとは逆向きの動作や当該動作を行うための力は、通常、筋力補助装置の着用者が意図しない限り生じない。したがって、このような動作または当該動作を行うための力に基づいて筋力補助の解除を行うことで、意図せずに筋力補助が解除されることを効果的に防止することができる。
In the embodiment as described above, the control unit 13 performs the second operation on the first wearing device 20 in a state where the relative movement of the second wearing device 25 in one direction with respect to the first wearing device 20 is restricted. The second mounting tool 25 tries to move in the other direction relative to the first mounting tool 20 and the index related to the relative movement in the other direction which is opposite to the one direction of the mounting tool 25. When it is determined that at least one of the indices related to the force satisfies a predetermined release condition, the restriction on the relative movement of the first wearing tool 20 in one direction with respect to the first wearing tool 20 is released. That is, according to the present embodiment, the index is related to the movement in the direction opposite to the direction in which the movement is restricted by the muscle force assist, and the direction in which the movement is regulated in the opposite direction from the direction in which the movement is restricted by the muscle strength assistance. When at least one of the indices related to the force satisfies the predetermined release condition, the muscle strength assistance is released. In the state of receiving the strength assisting force, an operation opposite to the direction in which the operation is restricted by the strength assisting force or a force for performing the operation is normally generated unless the wearer of the strength assisting device intends. Absent. Therefore, by canceling the muscular power assist based on such an operation or a force for performing the operation, it is possible to effectively prevent the muscular power assist from being released unintentionally.
以上のような一実施の形態において、制御部13は、第1装着具20に対する第2装着具25の一の向きへの相対動作が規制されている状態において、第1装着具20に対して第2装着具25を一の向きへ相対動作させようとする力に関連した指標が所定の解除条件を満たすと判断した場合、第1装着具20に対する第2装着具25の一の向きへの相対動作の規制を解除する。すなわち、本実施の形態によれば、筋力補助により規制された動作を行うための力に関連した指標、言い換えると、筋力補助力による規制を解除して可能となる動作を行うための力に関連した指標が、所定の解除条件を満たす場合に、筋力補助が解除される。したがって、解除条件は、筋力補助による規制を解除して実施しようとしている動作を行うための力に関する条件であって、さらに言い換えると、筋力補助を解除するための極めて直接的な動作を行うための力に関する条件と言える。したがって、このような動作を行うための力に基づいて筋力補助の解除を行うことで、意図せずに筋力補助が解除されることを効果的に防止することができる。
In one embodiment as described above, the control unit 13 controls the first wearing tool 20 with respect to the first wearing tool 20 in a state where relative movement of the second wearing tool 25 in one direction with respect to the first wearing tool 20 is restricted. When it is determined that the index related to the force to move the second wearing tool 25 relative to one direction satisfies the predetermined release condition, the second wearing tool 25 moves toward one direction with respect to the first wearing tool 20. Release the restriction of relative movement. That is, according to the present embodiment, it is related to an index related to a force for performing an operation regulated by muscle strength assistance, in other words, related to a force for performing an operation that can be performed by releasing the regulation by the muscle strength assistance force. The muscle strength assistance is released when the index that has been fulfilled the predetermined release condition. Therefore, the release condition is a condition related to the force for performing the operation to be performed after releasing the restriction by the muscle force assist, and in other words, for performing a very direct operation for releasing the muscle force assist. It can be said that it is a condition regarding power. Therefore, by canceling the muscular power assistance based on the force for performing such an operation, it is possible to effectively prevent the muscular power assistance from being released unintentionally.
また、本実施の形態において、所定の解除条件は、第1装着具20に対して第2装着具25を一の向きへ相対動作させようとする力が第1装着具20に対する第2装着具25の一の向きへの相対動作を規制する力よりも大きくなること、としている。すなわち、第2装着具25を第1装着具20に対して一定の位置に保持する力よりも大きな力が検出された場合に、筋力補助が解除される。このような条件を満たすには、意図的に筋力補助力に抗する大きな力を加えることになる。したがって、意図せずに筋力補助が解除されることをより効果的に防止することができる。
Further, in the present embodiment, the predetermined release condition is that a force to move the second mounting tool 25 relative to the first mounting tool 20 in one direction is a second mounting tool with respect to the first mounting tool 20. It is assumed that the force is greater than the force that restricts the relative movement in one direction. That is, when a force larger than the force that holds the second wearing tool 25 in a fixed position with respect to the first wearing tool 20 is detected, the muscle strength assistance is released. In order to satisfy such a condition, a large force that intentionally resists the strength assisting force is applied. Therefore, it is possible to more effectively prevent the muscle strength assistance from being released unintentionally.
さらに、本実施の形態において、センサ80は、第1装着具20及び第2装着具25の相対変位、第1装着具20及び第2装着具25の相対速度、第1装着具20及び第2装着具25の相対加速度、及び、第1装着具20及び第2装着具25の相対ジャーク、着用者の筋電位、及び、着用者の筋肉の隆起度合いの一以上を検出する。着用者は、第1装着具20に対する第2装着具25の相対変位、相対速度、相対加速度および相対ジャークや、筋電位および隆起度合い等を容易に変化させることができる。したがって、着用者が、筋力補助の供給を停止したい場合、筋力補助力を解除するための意思表示を容易に行うことができる。これにより、意図した場合に、筋力補助をより確実に解除することができる。
Further, in the present embodiment, the sensor 80 includes the relative displacement of the first mounting tool 20 and the second mounting tool 25, the relative speed of the first mounting tool 20 and the second mounting tool 25, the first mounting tool 20 and the second mounting tool 25. One or more of the relative acceleration of the wearing tool 25, the relative jerk of the first wearing tool 20 and the second wearing tool 25, the myoelectric potential of the wearer, and the degree of bulging of the wearer's muscle are detected. The wearer can easily change the relative displacement, the relative speed, the relative acceleration, the relative jerk, the myoelectric potential, the degree of bulging, and the like of the second wearing tool 25 with respect to the first wearing tool 20. Therefore, when a wearer wants to stop supply of muscular strength assistance, the intention display for canceling muscular strength assistance can be performed easily. Thereby, when intended, muscular strength assistance can be canceled more reliably.
さらに、本実施の形態において、筋力補助装置10は、筋力補助装置10の姿勢を検出する姿勢センサ81をさらに備えている。そして、制御部13は、姿勢センサ81の検出結果に応じて所定の解除条件を調整する。筋力補助装置10の着用者の動作のし易さ及び動作を行うための力の加え易さは、当該着用者の全体的な姿勢に応じて変化する。したがって、筋力補助を解除する条件としての第1装着具20及び第2装着具25の相対動作の条件並びに相対動作を行うための力の条件を、姿勢センサ81で検出された筋力補助装置10の姿勢を考慮して決定することにより、意図せずに筋力補助が解除されることをより効果的に防止することができ、且つ、意図した場合に筋力補助をより確実に解除することができる。加えて、筋力補助装置10の着用者が転倒等してしまった場合等に、筋力補助が解除されるようにすることもできる。
Furthermore, in the present embodiment, the muscle force assisting apparatus 10 further includes a posture sensor 81 that detects the posture of the muscle force assisting device 10. Then, the control unit 13 adjusts a predetermined release condition according to the detection result of the attitude sensor 81. The ease of operation of the wearer of the muscle force assisting device 10 and the ease of applying a force for performing the operation vary depending on the overall posture of the wearer. Therefore, the condition of the relative strength of the first mounting tool 20 and the second mounting tool 25 and the condition of the force for performing the relative motion as the conditions for releasing the muscle strength assist of the muscle strength assisting apparatus 10 detected by the posture sensor 81 are described. By determining in consideration of the posture, it is possible to more effectively prevent unintentional release of muscle strength assistance, and more reliably release muscle strength assistance when intended. In addition, when the wearer of the muscle strength assisting apparatus 10 falls or the like, the muscle strength assist can be released.
さらに、本実施の形態において、筋力補助装置10は、異常を検出する異常検出センサ82をさらに備えている。そして、制御部13は、第1装着具20に対する第2装着具25の一の向きへの相対動作が規制されている状態において、異常検出センサ82が異常を検出した場合、第1装着具20に対する第2装着具25の一の向きへの相対動作の規制を解除する。このような筋力補助装置10によれば、例えば、筋力補助装置10に異常が生じた場合、筋力補助装置10の着用者に異常が生じた場合、筋力補助装置10の周囲で異常が生じた場合等に、筋力補助の供給を解除することができる。すなわち、異常時に、筋力補助により着用者の自由な動作が規制されることを効果的に回避することができる。
Furthermore, in the present embodiment, the muscle force assisting apparatus 10 further includes an abnormality detection sensor 82 for detecting an abnormality. When the abnormality detection sensor 82 detects an abnormality in a state where the relative movement of the second wearing tool 25 in one direction with respect to the first wearing tool 20 is restricted, the control unit 13 detects the first wearing tool 20. The restriction | limiting of the relative operation | movement to the one direction of the 2nd mounting tool 25 with respect to is cancelled | released. According to such a strength assisting device 10, for example, when an abnormality occurs in the strength assisting device 10, when an abnormality occurs in the wearer of the strength assisting device 10, or when an abnormality occurs around the strength assisting device 10 For example, the supply of muscle strength assistance can be canceled. That is, it is possible to effectively avoid the restriction of the free movement of the wearer with the assistance of the muscular strength at the time of abnormality.
さらに、本実施の形態において、異常検出センサ82は、着用者の筋電位を検出する筋電計、着用者の筋肉の隆起の度合いを検出するフォトリフレクタ、明るさを検出する光センサ、熱を検出する熱センサ、姿勢を検出する姿勢センサ、及び、周囲物との距離を検出する距離センサの一以上を含む。筋電計やフォトリフレクタによれば着用者の異常を検出することができ、光センサや熱センサによれば周囲環境の異常を検出することができる。また、姿勢センサや距離センサによれば、着用者の姿勢や着用者の位置等に関する異常を検出することができる。このような異常検出センサ82によれば、筋力補助により着用者の自由な動作が規制されるべきではない異常状態を検出することができる。
Furthermore, in the present embodiment, the abnormality detection sensor 82 includes an electromyograph that detects the wearer's myoelectric potential, a photo reflector that detects the degree of the wearer's muscle elevation, a light sensor that detects brightness, and heat. It includes one or more of a thermal sensor for detecting, a posture sensor for detecting posture, and a distance sensor for detecting a distance from surrounding objects. An abnormality of the wearer can be detected with an electromyograph or a photo reflector, and an abnormality of the surrounding environment can be detected with an optical sensor or a thermal sensor. Further, according to the posture sensor and the distance sensor, it is possible to detect an abnormality related to the posture of the wearer, the position of the wearer, and the like. According to such an abnormality detection sensor 82, it is possible to detect an abnormal state in which a wearer's free movement should not be restricted by assisting muscle strength.
以上、本発明を図示する一実施の形態に基づいて説明したが、本発明はこれらの実施形態に限定されるものではなく、この他にも種々の態様で実施可能である。以下、変形の一例について説明する。以下の説明では、上述した実施の形態と同様に構成され得る部分について、上述の実施の形態における対応する部分に対して用いた符号と同一の符号を用いるとともに、重複する説明を省略する。
As mentioned above, although this invention was demonstrated based on one embodiment which illustrates, this invention is not limited to these embodiment, In addition, it can implement in a various aspect. Hereinafter, an example of modification will be described. In the following description, for parts that can be configured in the same manner as in the above-described embodiment, the same reference numerals as those used for the corresponding parts in the above-described embodiment are used, and redundant description is omitted.
上述した一実施の形態において、筋力補助装置10の構成について一具体例を説明したが、これに限られない。制御部13が、上述した筋力補助装置とは異なる構成を有した筋力補助装置を制御する場合にも、上述した作用効果と同一の作用効果を享受することができる。図12~図14には、筋力補助装置10の一変形例が図示されている。図12~図14に示す例において、切替手段40は、出力軸部材76及び肩関節の側外方に配置されている。図12~図14に示された筋力補助装置10において、アシスト機構15は、第1部材41及び第2部材46を有した切替手段40と、切替手段40の第1部材41と相対回転不可能に接続した出力軸部材76と、を有している。第1部材41は、第1回転軸線(アシスト軸線)d1を中心として回転可能となっている。また、第2部材46は、第1回転軸線d1と平行な揺動軸線を中心として揺動可能となっている。さらに、第2部材46と接続したアクチュエータ31及び調整手段37は、第1回転軸線d1と直交する面上に、切替手段40とともに配置されている。
In the embodiment described above, a specific example of the configuration of the muscle force assisting apparatus 10 has been described, but the configuration is not limited thereto. Even when the control unit 13 controls a muscle force assisting device having a configuration different from that of the above-described muscle force assisting device, the same function and effect as those described above can be enjoyed. 12 to 14 show a modified example of the muscle strength assisting apparatus 10. In the examples shown in FIGS. 12 to 14, the switching means 40 is disposed on the outer side of the output shaft member 76 and the shoulder joint. In the muscular strength assisting apparatus 10 shown in FIGS. 12 to 14, the assist mechanism 15 is not capable of rotating relative to the switching means 40 having the first member 41 and the second member 46 and the first member 41 of the switching means 40. And an output shaft member 76 connected to the. The first member 41 is rotatable about a first rotation axis (assist axis) d1. Further, the second member 46 can swing about a swing axis parallel to the first rotation axis d1. Further, the actuator 31 and the adjusting unit 37 connected to the second member 46 are disposed together with the switching unit 40 on a plane orthogonal to the first rotation axis d1.
また、上述した一実施の形態において、切替手段40の具体的な構成を説明したが、上述した構成は例示に過ぎない。上述した一実施の形態において、第2部材46が第1部材41とともにバンドブレーキ機構39を構成し、第2部材46の揺動部材47a,47bが第1部材41をなす回転ドラム42に径方向外方から当接する例を示したが、この例に限られず、回転ドラム42が筒状に形成され、回転ドラム42の内部に配置された第1部材41が回転ドラム42に径方向内方から当接して、第1部材41と第2部材46との相対回転を規制するようにしてもよい。
In the above-described embodiment, the specific configuration of the switching unit 40 has been described. However, the above-described configuration is merely an example. In the above-described embodiment, the second member 46 constitutes the band brake mechanism 39 together with the first member 41, and the swinging members 47 a and 47 b of the second member 46 are arranged in the radial direction with respect to the rotary drum 42 constituting the first member 41. Although the example which contact | abuts from the outer side was shown, it is not restricted to this example, The rotating drum 42 is formed in a cylinder shape, The 1st member 41 arrange | positioned inside the rotating drum 42 is the radial direction inner side to the rotating drum 42. The relative rotation between the first member 41 and the second member 46 may be restricted by abutting.
また、切替手段40が、ディスクブレーキ機構として構成されていてもよい。具体的には、円板状に形成された第1部材41に、第1部材41の回転軸線と平行な方向から、第2部材46が当接するようにしてもよい。この例において、第1部材41に第2部材46が当接することで、第1装着具20に対する第2装着具25の相対動作が規制される。
Further, the switching means 40 may be configured as a disc brake mechanism. Specifically, the second member 46 may abut on the first member 41 formed in a disc shape from a direction parallel to the rotation axis of the first member 41. In this example, when the second member 46 abuts on the first member 41, the relative movement of the second mounting tool 25 with respect to the first mounting tool 20 is restricted.
さらに、切替手段40がラチェット機構として構成されていてもよい。具体例としては、第1部材41の外周面にラチェット歯が形成され、第2部材46をなす爪部材が、第1部材に径方向外方から接離するようになっていてもよい。この例において、第2部材46が第1部材41に接近すると、爪がラチェット歯に係合し、第1部材41及び第2部材46の一方向への相対回転が規制されるとともに、第1部材41及び第2部材46の他方向への相対回転が許容されるようにしてもよい。このとき、回転制動モードとして、第2装着具25の第1装着具20に対する一方向への相対動作が規制され、第2装着具25の第1装着具20に対する他方向への相対動作が許容される。一方、第2部材46が第1部材41から離間すると、第1部材41及び第2部材46の自由な相対回転が確保される。このとき、自由回転モードとして、第2装着具25の第1装着具20に対する自由な相対動作が許容される。
Furthermore, the switching means 40 may be configured as a ratchet mechanism. As a specific example, ratchet teeth may be formed on the outer peripheral surface of the first member 41, and a claw member forming the second member 46 may come into contact with or separate from the first member from the outside in the radial direction. In this example, when the second member 46 approaches the first member 41, the claw engages with the ratchet teeth, the relative rotation of the first member 41 and the second member 46 in one direction is restricted, and the first You may make it the relative rotation to the other direction of the member 41 and the 2nd member 46 is accept | permitted. At this time, as a rotational braking mode, the relative movement of the second mounting tool 25 in one direction with respect to the first mounting tool 20 is restricted, and the relative movement of the second mounting tool 25 in the other direction with respect to the first mounting tool 20 is allowed. Is done. On the other hand, when the second member 46 is separated from the first member 41, free relative rotation of the first member 41 and the second member 46 is ensured. At this time, as a free rotation mode, free relative movement of the second mounting tool 25 with respect to the first mounting tool 20 is allowed.
さらに、上述した一実施の形態において、第1装着具20及び第2装着具25がアシスト軸線d1を中心として相対回転可能に構成されている例を示したが、この例に限られない。第1装着具20及び第2装着具25の相対動作は、特に限定されず、例えば直線動作であってもよい。
Furthermore, in the above-described embodiment, the example in which the first wearing tool 20 and the second wearing tool 25 are configured to be rotatable relative to each other about the assist axis d1 is shown, but the present invention is not limited to this example. The relative motion of the first mounting tool 20 and the second mounting tool 25 is not particularly limited, and may be a linear motion, for example.
なお、以上において上述した一実施の形態に対するいくつかの変形例を説明してきたが、当然に、複数の変形例を適宜組み合わせて適用することも可能である。
In addition, although the some modification with respect to one Embodiment mentioned above has been demonstrated above, naturally, it is also possible to apply combining several modifications suitably.
Claims (14)
- 人体の二つの部位のうちの一方に取り付けられる第1装着具と、
アシスト軸線を中心として前記第1装着具に対して相対回転可能であり、前記二つの部位のうちの他方に取り付けられる第2装着具と、
前記第1装着具に対する前記第2装着具の前記アシスト軸線を中心とした少なくとも一方向への相対回転を規制可能なアシスト機構と、
前記第1装着具及び前記第2装着具の前記アシスト軸線を中心とする相対回転に関連した指標、並びに、前記第1装着具及び前記第2装着具を相対回転させようとする力に関連した指標の少なくとも一方を得るためのセンサと、
前記アシスト機構を制御する制御部と、を備え、
前記制御部は、前記第1装着具に対する前記第2装着具の前記一方向への相対回転が規制されている状態において、前記第1装着具に対する前記第2装着具の前記一方向とは逆方向となる他方向への相対回転に関連した指標および前記第1装着具に対して前記第2装着具を相対回転させようとする力に関連した指標の少なくとも一方が所定の解除条件を満たすと判断した場合、前記第1装着具に対する前記第2装着具の前記一方向への相対回転の規制を解除するよう、前記アシスト機構を制御する、筋力補助装置。 A first wearing tool attached to one of the two parts of the human body;
A second wearing tool that is rotatable relative to the first wearing tool about an assist axis, and is attached to the other of the two parts;
An assist mechanism capable of restricting relative rotation in at least one direction around the assist axis of the second wearing tool with respect to the first wearing tool;
Indices related to relative rotation of the first wearing tool and the second wearing tool around the assist axis, and a force related to relative rotation of the first wearing tool and the second wearing tool A sensor for obtaining at least one of the indicators;
A control unit for controlling the assist mechanism,
The control unit is opposite to the one direction of the second mounting tool relative to the first mounting tool in a state where relative rotation of the second mounting tool relative to the first mounting tool in the one direction is restricted. When at least one of an index related to relative rotation in the other direction that is a direction and an index related to a force for relatively rotating the second mounting tool relative to the first mounting tool satisfies a predetermined release condition A muscle force assisting device that controls the assist mechanism so as to release the restriction on the relative rotation of the second wearing tool in the one direction with respect to the first wearing tool when the determination is made. - 前記所定の解除条件は、前記第1装着具に対して前記第2装着具を前記一方向へ相対回転させようとする力が前記第1装着具に対する前記第2装着具の前記一方向への相対回転を規制する力よりも大きくなること、である、請求項1に記載の筋力補助装置。 The predetermined release condition is that a force to rotate the second mounting tool relative to the first mounting tool in the one direction is applied to the one direction of the second mounting tool relative to the first mounting tool. The muscular strength assisting device according to claim 1, wherein the muscular strength assisting device is greater than a force that regulates relative rotation.
- 前記指標は、前記第1装着具および前記第2装着具の相対変位、前記第1装着具および前記第2装着具の相対速度、前記第1装着具および前記第2装着具の相対加速度、前記第1装着具および前記第2装着具の相対ジャーク、着用者の筋電位、及び、着用者の筋肉の隆起度合いの一以上を含む、請求項1又は2に記載の筋力補助装置。 The indicator includes a relative displacement of the first wearing tool and the second wearing tool, a relative speed of the first wearing tool and the second wearing tool, a relative acceleration of the first wearing tool and the second wearing tool, The muscle force assisting device according to claim 1, comprising one or more of a relative jerk of the first wearing device and the second wearing device, a myoelectric potential of the wearer, and a degree of bulging of the wearer's muscle.
- 筋力補助装置の姿勢を検出する姿勢センサをさらに備え、
前記制御部は、前記姿勢センサの検出結果に応じて前記所定の解除条件を調整する、請求項1~3のいずれか一項に記載の筋力補助装置。 A posture sensor for detecting the posture of the muscle force assisting device;
The muscle force assisting apparatus according to any one of claims 1 to 3, wherein the control unit adjusts the predetermined release condition according to a detection result of the posture sensor. - 異常を検出する異常検出センサをさらに備え、
前記制御部は、前記第1装着具に対する前記第2装着具の前記一方向への相対回転が規制されている状態において、前記異常検出センサが異常を検出した場合、前記第1装着具に対する前記第2装着具の前記一方向への相対回転の規制を解除するよう、前記アシスト機構を制御する、請求項1~4のいずれか一項に記載の筋力補助装置。 It further includes an abnormality detection sensor for detecting an abnormality,
When the abnormality detection sensor detects an abnormality in a state where relative rotation of the second wearing tool in the one direction with respect to the first wearing tool is restricted, the control unit detects the abnormality with respect to the first wearing tool. The muscle force assisting apparatus according to any one of claims 1 to 4, wherein the assist mechanism is controlled so as to cancel the restriction on the relative rotation of the second wearing tool in the one direction. - 異常を検出する異常検出センサをさらに備え、
前記制御部は、前記第1装着具に対する前記第2装着具の前記一方向への相対回転が規制されている状態において、前記異常検出センサが異常を検出した場合、前記解除条件が満されたと判断しても、前記第1装着具に対する前記第2装着具の前記一方向への相対回転の規制を維持するよう、前記アシスト機構を制御する、請求項1~4のいずれか一項に記載の筋力補助装置。 It further includes an abnormality detection sensor for detecting an abnormality,
In the state where the relative rotation of the second wearing tool in the one direction with respect to the first wearing tool is restricted, the control unit determines that the release condition is satisfied when the abnormality detecting sensor detects an abnormality. The assist mechanism is controlled so as to maintain regulation of relative rotation of the second wearing tool in the one direction with respect to the first wearing tool even if the determination is made. Muscle strength assist device. - 前記異常検出センサは、着用者の筋電位を検出する筋電計、着用者の筋肉の隆起の度合いを検出するフォトリフレクタ、明るさを検出する光センサ、熱を検出する熱センサ、姿勢を検出する姿勢センサ、及び、周囲物との距離を検出する距離センサの一以上を含む、請求項5又は6に記載の筋力補助装置。 The abnormality detection sensor is an electromyograph that detects the myoelectric potential of the wearer, a photo reflector that detects the degree of the muscles of the wearer, a light sensor that detects brightness, a heat sensor that detects heat, and a posture detection The muscular strength assisting device according to claim 5 or 6, comprising at least one of a posture sensor for detecting a distance to the surrounding object and a distance sensor for detecting a distance to a surrounding object.
- 人体の二つの部位のうちの一方に取り付けられる第1装着具と、
前記第1装着具に対して相対動作可能であり、前記二つの部位のうちの他方に取り付けられる第2装着具と、
前記第1装着具に対する前記第2装着具の少なくとも一の向きへの前記相対動作を規制可能なアシスト機構と、
前記第1装着具及び前記第2装着具の相対動作に関連した指標、並びに、前記第1装着具及び前記第2装着具を相対動作させようとする力に関連した指標の少なくとも一方を得るためのセンサと、
前記アシスト機構を制御する制御部と、を備え、
前記制御部は、前記第1装着具に対する前記第2装着具の前記一の向きへの相対動作が規制されている状態において、前記第1装着具に対する前記第2装着具の前記一の向きとは逆向きとなる他の向きへの相対動作に関連した指標および前記第1装着具に対して前記第2装着具を相対動作させようとする力に関連した指標の少なくとも一方が所定の解除条件を満たすと判断した場合、前記第1装着具に対する前記第2装着具の前記一の向きへの相対動作の規制を解除するよう、前記アシスト機構を制御する、筋力補助装置。 A first wearing tool attached to one of the two parts of the human body;
A second mounting tool operable relative to the first mounting tool and attached to the other of the two parts;
An assist mechanism capable of restricting the relative movement of the second wearing tool in at least one direction with respect to the first wearing tool;
To obtain at least one of an index related to the relative motion of the first mounting tool and the second mounting tool, and an index related to a force for causing the first mounting tool and the second mounting tool to move relative to each other. With sensors,
A control unit for controlling the assist mechanism,
In the state where the relative movement of the second wearing tool relative to the first wearing tool in the one direction is restricted, the control unit is configured to change the one direction of the second wearing tool relative to the first wearing tool. Is a predetermined release condition when at least one of the index related to the relative movement in the opposite direction and the index related to the force to move the second mounting tool relative to the first mounting tool is a predetermined release condition A muscle force assisting device that controls the assist mechanism so as to release the restriction of the relative movement of the second wearing tool in the one direction with respect to the first wearing tool when it is determined that the condition is satisfied. - 前記所定の解除条件は、前記第1装着具に対して前記第2装着具を前記一の向きへ相対動作させようとする力が前記第1装着具に対する前記第2装着具の前記一の向きへの相対動作を規制する力よりも大きくなること、である、請求項8に記載の筋力補助装置。 The predetermined release condition is that the direction of the second mounting tool relative to the first mounting tool is a force that causes the second mounting tool to move relative to the first mounting tool in the one direction. The muscular strength assisting device according to claim 8, wherein the muscular strength assisting device is greater than a force that regulates a relative movement to the muscular body.
- 前記指標は、前記第1装着具および前記第2装着具の相対変位、前記第1装着具および前記第2装着具の相対速度、前記第1装着具および前記第2装着具の相対加速度、前記第1装着具および前記第2装着具の相対ジャーク、着用者の筋電位、及び、着用者の筋肉の隆起度合いの一以上を含む、請求項8又は9に記載の筋力補助装置。 The indicator includes a relative displacement of the first wearing tool and the second wearing tool, a relative speed of the first wearing tool and the second wearing tool, a relative acceleration of the first wearing tool and the second wearing tool, 10. The muscle force assisting device according to claim 8, comprising one or more of a relative jerk of the first wearing device and the second wearing device, a myoelectric potential of the wearer, and a degree of bulging of the wearer's muscle.
- 筋力補助装置の姿勢を検出する姿勢センサをさらに備え、
前記制御部は、前記姿勢センサの検出結果に応じて前記所定の解除条件を調整する、請求項8~10のいずれか一項に記載の筋力補助装置。 A posture sensor for detecting the posture of the muscle force assisting device;
The muscle force assisting apparatus according to any one of claims 8 to 10, wherein the control unit adjusts the predetermined release condition according to a detection result of the posture sensor. - 異常を検出する異常検出センサをさらに備え、
前記制御部は、前記第1装着具に対する前記第2装着具の前記一の向きへの相対動作が規制されている状態において、前記異常検出センサが異常を検出した場合、前記第1装着具に対する前記第2装着具の前記一の向きへの相対動作の規制を解除するよう、前記アシスト機構を制御する、請求項8~11のいずれか一項に記載の筋力補助装置。 It further includes an abnormality detection sensor for detecting an abnormality,
When the abnormality detection sensor detects an abnormality in a state in which the relative movement of the second wearing tool in the one direction with respect to the first wearing tool is restricted, the control unit applies to the first wearing tool. The muscle force assisting apparatus according to any one of claims 8 to 11, wherein the assist mechanism is controlled so as to cancel the restriction of the relative movement of the second wearing tool in the one direction. - 異常を検出する異常検出センサをさらに備え、
前記制御部は、前記第1装着具に対する前記第2装着具の前記一の向きへの相対動作が規制されている状態において、前記異常検出センサが異常を検出した場合、前記解除条件が満されたと判断しても、前記第1装着具に対する前記第2装着具の前記一の向きへの相対動作の規制を維持するよう、前記アシスト機構を制御する、請求項8~12のいずれか一項に記載の筋力補助装置。 It further includes an abnormality detection sensor for detecting an abnormality,
In the state where the relative movement of the second wearing tool in the one direction with respect to the first wearing tool is restricted, the control unit satisfies the release condition when the abnormality detecting sensor detects an abnormality. The assist mechanism is controlled so as to maintain the restriction of the relative movement of the second wearing tool in the one direction with respect to the first wearing tool even if it is determined that the second wearing tool is not. The muscular strength assisting device according to 1. - 前記異常検出センサは、着用者の筋電位を検出する筋電計、着用者の筋肉の隆起の度合いを検出するフォトリフレクタ、明るさを検出する光センサ、熱を検出する熱センサ、姿勢を検出する姿勢センサ、及び、周囲物との距離を検出する距離センサの一以上を含む、請求項12又は13に記載の筋力補助装置。 The abnormality detection sensor is an electromyograph that detects the myoelectric potential of the wearer, a photo reflector that detects the degree of the muscles of the wearer, a light sensor that detects brightness, a heat sensor that detects heat, and a posture detection The muscle force assisting device according to claim 12 or 13, comprising at least one of a posture sensor for detecting a distance and a distance sensor for detecting a distance to a surrounding object.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2018559604A JPWO2018124222A1 (en) | 2016-12-28 | 2017-12-27 | Strength assist device |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016256643 | 2016-12-28 | ||
| JP2016-256643 | 2016-12-28 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2018124222A1 true WO2018124222A1 (en) | 2018-07-05 |
Family
ID=62709568
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2017/047064 WO2018124222A1 (en) | 2016-12-28 | 2017-12-27 | Muscle-power assistance device |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JPWO2018124222A1 (en) |
| WO (1) | WO2018124222A1 (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020066110A (en) * | 2018-10-25 | 2020-04-30 | 国立大学法人千葉大学 | Method for controlling work auxiliary tool |
Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009112447A (en) * | 2007-11-05 | 2009-05-28 | Tokai Rika Co Ltd | Muscular strength assisting device |
| JP2012125477A (en) * | 2010-12-17 | 2012-07-05 | Bosch Corp | Wearable action-assist device and method for controlling supply power |
| JP2012205834A (en) * | 2011-03-30 | 2012-10-25 | Equos Research Co Ltd | Walking assistance device and method for controlling the same |
| JP2015173739A (en) * | 2014-03-13 | 2015-10-05 | 株式会社東芝 | Knee joint movement support device |
| JP2017154210A (en) * | 2016-03-02 | 2017-09-07 | パナソニック株式会社 | Operation support device, and operation support system |
| WO2017222052A1 (en) * | 2016-06-23 | 2017-12-28 | 国立大学法人 香川大学 | Muscular strength assistance device |
Family Cites Families (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5909063B2 (en) * | 2011-09-06 | 2016-04-26 | 国立大学法人 和歌山大学 | Power assist robot |
-
2017
- 2017-12-27 JP JP2018559604A patent/JPWO2018124222A1/en active Pending
- 2017-12-27 WO PCT/JP2017/047064 patent/WO2018124222A1/en active Application Filing
Patent Citations (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009112447A (en) * | 2007-11-05 | 2009-05-28 | Tokai Rika Co Ltd | Muscular strength assisting device |
| JP2012125477A (en) * | 2010-12-17 | 2012-07-05 | Bosch Corp | Wearable action-assist device and method for controlling supply power |
| JP2012205834A (en) * | 2011-03-30 | 2012-10-25 | Equos Research Co Ltd | Walking assistance device and method for controlling the same |
| JP2015173739A (en) * | 2014-03-13 | 2015-10-05 | 株式会社東芝 | Knee joint movement support device |
| JP2017154210A (en) * | 2016-03-02 | 2017-09-07 | パナソニック株式会社 | Operation support device, and operation support system |
| WO2017222052A1 (en) * | 2016-06-23 | 2017-12-28 | 国立大学法人 香川大学 | Muscular strength assistance device |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2020066110A (en) * | 2018-10-25 | 2020-04-30 | 国立大学法人千葉大学 | Method for controlling work auxiliary tool |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2018124222A1 (en) | 2019-10-31 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2017222052A1 (en) | Muscular strength assistance device | |
| EP2945590B1 (en) | Interface for adjusting the motion of a powered orthotic device through externally applied forces | |
| US10799381B2 (en) | Tendon device for suit type robot for assisting human with physical strength | |
| JP4573798B2 (en) | Lumbar support device | |
| US8235924B2 (en) | Orthotic brace | |
| WO2016180073A1 (en) | Exoskeleton ankle robot | |
| RU2735674C2 (en) | Prosthetic appliance | |
| JP6030737B2 (en) | Joint drive device | |
| JP6842675B2 (en) | Muscle strength assist device | |
| JP2015173739A (en) | Knee joint movement support device | |
| WO2017110930A1 (en) | Wearable motion assisting device performance evaluation device and performance evaluation method | |
| WO2018124222A1 (en) | Muscle-power assistance device | |
| KR20210053976A (en) | Wearable active assistive device | |
| JP6842676B2 (en) | Muscle strength assist device | |
| CN113070866A (en) | Hip exoskeleton walking-aid robot driven by flexible joints | |
| WO2018124223A1 (en) | Muscle-power assistance device | |
| JP6759357B2 (en) | Muscle strength assist device | |
| EP3986353B1 (en) | A wearable lower extremity exoskeleton | |
| JP6821160B2 (en) | Muscle strength assist device | |
| JP5844054B2 (en) | Wearable motion support device | |
| KR102217337B1 (en) | Elastomer Gear Unit And Elastic Actuator Having The Same | |
| CN107020619B (en) | A kind of pressure-sensitive intelligence knee elbow joint protection electric transmission power-assisted guidance system | |
| WO2015040758A1 (en) | Body weight support device | |
| JP2019193961A (en) | Support device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 17887233 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2018559604 Country of ref document: JP Kind code of ref document: A |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 17887233 Country of ref document: EP Kind code of ref document: A1 |