WO2017188230A1 - Construction machine - Google Patents
Construction machine Download PDFInfo
- Publication number
- WO2017188230A1 WO2017188230A1 PCT/JP2017/016334 JP2017016334W WO2017188230A1 WO 2017188230 A1 WO2017188230 A1 WO 2017188230A1 JP 2017016334 W JP2017016334 W JP 2017016334W WO 2017188230 A1 WO2017188230 A1 WO 2017188230A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- obstacle
- construction machine
- unit
- lower traveling
- detection
- Prior art date
Links
- 238000010276 construction Methods 0.000 title claims abstract description 57
- 238000001514 detection method Methods 0.000 claims abstract description 90
- 238000012544 monitoring process Methods 0.000 claims abstract description 59
- 238000010586 diagram Methods 0.000 claims description 15
- 238000004891 communication Methods 0.000 claims description 9
- 238000013459 approach Methods 0.000 claims description 6
- 238000000034 method Methods 0.000 description 17
- 238000012545 processing Methods 0.000 description 5
- 238000009434 installation Methods 0.000 description 4
- 239000013256 coordination polymer Substances 0.000 description 2
- 239000000126 substance Substances 0.000 description 2
- 230000010365 information processing Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
Images










Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R21/00—Arrangements or fittings on vehicles for protecting or preventing injuries to occupants or pedestrians in case of accidents or other traffic risks
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/24—Safety devices, e.g. for preventing overload
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/26—Indicating devices
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S17/00—Systems using the reflection or reradiation of electromagnetic waves other than radio waves, e.g. lidar systems
- G01S17/88—Lidar systems specially adapted for specific applications
- G01S17/93—Lidar systems specially adapted for specific applications for anti-collision purposes
-
- G—PHYSICS
- G05—CONTROLLING; REGULATING
- G05D—SYSTEMS FOR CONTROLLING OR REGULATING NON-ELECTRIC VARIABLES
- G05D1/00—Control of position, course, altitude or attitude of land, water, air or space vehicles, e.g. using automatic pilots
- G05D1/02—Control of position or course in two dimensions
Definitions
- the present invention relates to a construction machine that stores information on obstacles located around the construction machine.
- This monitoring mobile body includes a foreign object detection sensor that detects obstacles on the road surface.
- the monitoring mobile body includes a positioning device that outputs travel position information of the mobile body, a foreign object detection sensor that acquires foreign object detection information by monitoring foreign objects on the road surface, travel position information, and foreign object detection information.
- An object of the present invention is to provide a construction machine that can grasp not only the position of an obstacle but also the time zone when the obstacle is detected.
- the present invention is a construction machine, which is a lower traveling body, an upper revolving body that is disposed on the lower traveling body and is rotatable with respect to the lower traveling body, and the construction machine
- An obstacle detection sensor that detects the presence or absence of an obstacle in a monitoring area set in advance around the obstacle and a distance to the obstacle, and a reference that is preset for the construction machine based on a detection result by the obstacle detection sensor
- a first calculation unit that calculates first position information including position coordinates of the obstacle with respect to a position; a time information possessing unit that includes time information for specifying a time when the obstacle is detected; and the first position.
- a construction machine is provided that includes a storage unit that stores log data in which information and time information are associated with each other.
- the present invention since the time when the obstacle is detected and the position of the obstacle with respect to the reference position of the construction machine are stored in association with each other, not only the position of the obstacle but also the obstacle is detected. It is also possible to grasp the time zone.
- the construction machine according to the present invention is suitable for a hydraulic excavator or the like that stores information on obstacles in the vicinity of the machine.
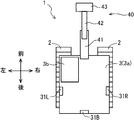
- FIG. 1 is a side view showing a hydraulic excavator according to an embodiment of the present invention. It is II arrow directional view (plan view) of FIG. It is a functional block diagram including the control part of a hydraulic excavator. It is a top view of the hydraulic shovel 1 for demonstrating the angle which a lower traveling body and an upper turning body make. It is a top view of the hydraulic shovel for demonstrating the monitoring area
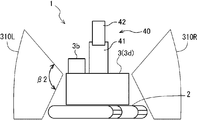
- FIG. 6 is a view taken in the direction of arrow VI in FIG. 5 (a rear view with respect to the upper swing body).
- FIG. 1 A construction machine according to an embodiment of the present invention will be described with reference to FIGS.
- a hydraulic excavator 1 shown in FIG. 1 is illustrated as a construction machine according to the present invention.
- the longitudinal direction and the lateral direction of the machine are appropriately defined as necessary.
- a hydraulic excavator 1 includes a crawler-type lower traveling body 2 and an upper revolving body 3 provided on the lower traveling body 2 in a state of being able to swivel about a vertical axis with respect to the lower traveling body 2. And an attachment 40 attached to the upper swing body 3 so as to be raised and lowered.
- the attachment 40 has a boom 41 having a base end portion that is attached to the upper swing body 3 so as to be rotatable around a horizontal axis, and is attached to the distal end portion of the boom 41 so as to be rotatable around the horizontal axis.
- An arm 42 having a base end portion and a bucket 43 attached to the tip end portion of the arm 42 so as to be rotatable about a horizontal axis are provided.
- the attachment 40 includes a boom cylinder (not shown) that rotates the boom 41 with respect to the upper swing body 3, an arm cylinder 44 that rotates the arm 42 with respect to the boom 41, and a bucket 43 with respect to the arm 42. And a bucket cylinder 45 for rotating the.
- the upper turning body 3 is a guard that covers a turning frame 3a that is turnably mounted on the lower traveling body 2, a cabin 3b that is provided on the turning frame 3a, and an engine and other devices that are provided on the turning frame 3a.
- 3c and a counterweight 3d provided at the rear part of the turning frame 3a.
- An attachment 40 is attached to the front portion of the swivel frame 3a so as to be raised and lowered. In FIG. 2, illustration of the guard 3c and the counterweight 3d is omitted.
- the upper swing body 3 includes a left sensor 31L, a right sensor 31R, and a rear sensor 31B.
- the left sensor 31L is provided along the left side surface of the upper swing body 3. Specifically, the left sensor 31L is attached to the turning frame 3a with its detection area facing the left side.
- the right sensor 31 ⁇ / b> R is provided along the right side surface of the upper swing body 3. Specifically, the right sensor 31R is attached to the turning frame 3a with its detection area directed to the right side.
- the rear sensor 31 ⁇ / b> B is provided along the rear side surface of the upper swing body 3. Specifically, the rear sensor 31B is attached to the turning frame 3a with its detection range directed rearward.
- Each of the sensors 31L, 31R, and 31B is a three-dimensional distance measuring sensor (distance sensor), and calculates the distance based on the time for which the infrared laser projected on the object reciprocates.
- the detection area of each sensor 31L, 31R, 31B is defined by the area (angle of view) irradiated with the infrared laser and the distance to be detected by each sensor 31L, 31R, 31B.
- each sensor 31L, 31R, 31B can detect an obstacle as an obstacle when something is present at a different distance from a certain distance.
- each of the sensors 31L, 31R, and 31B is an example of an obstacle detection sensor having a detection area that can detect the presence or absence of an obstacle and the distance to the obstacle.
- FIG. 3 is a block diagram showing an electrical configuration provided in the excavator 1 of FIG.
- the excavator 1 further includes an angle detector 33, a work state detector 35, and a GPS receiver 37 in addition to the sensors 31 ⁇ / b> L, 31 ⁇ / b> R, and 31 ⁇ / b> B.
- the angle detector 33 can detect the relative angle ⁇ between the lower traveling body 2 and the upper rotating body 3 in the turning direction of the upper rotating body 3.
- the angle detection unit 33 can be configured by, for example, a rotary encoder or a gyro sensor.
- the work state detection unit 35 detects a work state indicating whether the excavator 1 is “working” or “stopped”. Specifically, the work state detection unit 35 detects the work state as “stopped” in a state where the excavator 1 is idling (a state in which the attachment 40 has not been operated for a certain period of time), for example. Is detected as “work in progress”.
- the work state detection unit 35 is, for example, a sensor that detects an operation state of the getting-on / off block lever that makes the attachment 40 inoperable when operated by an operator, or a sensor that detects a non-operation state of the operation lever for the attachment 40 Can be configured.
- the GPS receiving unit 37 uses GPS (Global information) to specify second position information including position coordinates (second position coordinates CP2 described later) of a reference position RP (see FIG. 10) preset in the excavator 1. Positioning System) Receives from satellite. Specifically, the GPS receiver 37 calculates the position coordinates of the reference position RP based on a plurality of signals received from a plurality of GPS satellites (three-dimensional positioning).
- the excavator 1 further includes a control unit 4, a storage unit 5, a display unit 6, a communication unit 7, a time measuring unit 8, an alarm output unit 9, and an input unit 10.
- the control unit 4 is a processing unit that controls various processes including the process (described later) in the flowchart of FIG. Specifically, the control unit 4 includes a first calculation unit 4a, a monitoring area setting unit 4b, a generation unit 4c, a second calculation unit 4d, and a count unit 4e.
- the first calculation unit 4a calculates first position information including the position coordinates of the obstacle with respect to the reference position RP set in advance on the excavator 1 based on the detection results by the sensors 31L, 31R, and 31B. Specifically, as shown in FIG. 10, when the three-dimensional coordinate of the reference position RP is (0, 0, 0), the first calculation unit 4a uses the three-dimensional coordinates (x1, y1, z1) of the obstacle. ) As the first position coordinate CP1. In the example shown in FIG. 10, since the obstacle is located on the right side of the excavator 1, the first calculation unit 4a calculates the first position coordinate CP1 mainly based on the detection result by the right sensor 31R.
- the monitoring region setting unit 4b places monitoring regions 310L, 310R, and 310B around the excavator 1 as shown in FIGS. Set.
- the monitoring areas 310L, 310R, and 310B will be described.
- the monitoring areas 310L, 310R, and 310B are areas set in advance to detect a person or an object approaching the hydraulic excavator 1 as an obstacle.
- the monitoring areas 310L, 310R, and 310B are set to areas that are difficult for the operator in the cabin 3b to see.
- the monitoring area 310L is set on the left side of the upper swing body 3
- the monitoring area 310R is set on the right side of the upper swing body 3
- the monitoring area 310B is set behind the upper swing body 3.
- the positions of the monitoring areas 310L, 310R, and 310B are not limited to these positions, and the monitoring area may be set in an area that can be easily viewed by the operator.
- the monitoring areas 310L, 310R, and 310B show the monitoring areas 310L, 310R, and 310B in a state where the lower traveling body 2 and the upper swing body 3 face the same direction.
- the state in which the lower traveling body 2 and the upper swing body 3 are directed in the same direction means the traveling direction of the lower traveling body 2 and the front-rear direction of the upper swing body 3 (the front-rear direction as viewed from the operator in the cabin 3b). : The same shall apply hereinafter).
- FIGS. 7 and 8 show the monitoring areas 310L, 310R, and 310B in a state in which the upper swing body 3 turns and the lower traveling body 2 and the upper swing body 3 face different directions.
- the state in which the lower traveling body 2 and the upper swing body 3 are directed in different directions refers to a state in which the traveling direction of the lower traveling body 2 and the front-rear direction of the upper swing body 3 do not match.
- the monitoring area 310L is an area set on the left side of the excavator 1 based on the detection area of the left sensor 31L.
- the monitoring area 310R is an area set on the right side of the excavator 1 based on the detection area of the right sensor 31R.
- the monitoring area 310B is an area set based on the detection area of the rear sensor 31B on the rear side of the excavator 1.
- the monitoring region setting unit 4b determines whether or not the lower traveling body is located in the detection region of the sensors 31L, 31R, and 31B based on the relative angle ⁇ (see FIG. 4) detected by the angle detection unit 33.
- the areas excluding the lower traveling body 2 from the detection area are set as the monitoring areas 310L, 310R, and 310B.
- the monitoring area setting unit 4b sets the same areas as the detection areas of the sensors 31L, 31R, and 31B in the monitoring areas 310L, 310R, and 310B.
- the monitoring area setting unit 4b sets the areas excluding the lower traveling body 2 from the detection areas of the sensors 31L, 31R, and 31B in the monitoring areas 310L, 310R, and 310B.
- the lower traveling body 2 is removed from the detection areas of both the sensors 31L and 31R by narrowing the angle of view of the left sensor 31L and the right sensor 31R upward.
- illustration is abbreviate
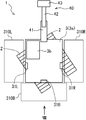
- the monitoring areas 310L, 310R, and 310B when the lower traveling body 2 and the upper turning body 3 are facing different directions are when they are facing the same direction (FIG. 8). 5) is set narrower in the vertical direction than the monitoring areas 310L, 310R, 310B.
- the sensor field angles of the monitoring areas 310L and 310R are ⁇ 1 in FIG. 6 and ⁇ 2 smaller than ⁇ 1 in FIG.
- the monitoring areas 310L and 310R when the lower traveling body 2 and the upper swing body 3 are facing different directions are when the both are facing the same direction (in the case of FIG. 5). It is set wider in the horizontal direction than the monitoring areas 310L and 310R. The reason is that when the lower traveling body 2 and the upper swing body 3 are directed in different directions, the rear side of the traveling direction of the lower traveling body 2 needs to be detected by the left sensor 31L or the right sensor 31R. Because.
- the second calculation unit 4 d uses the second position coordinate CP ⁇ b> 2 (the first position coordinate CP ⁇ b> 2) including the GPS coordinate of the reference position RP (see FIG. 10) of the hydraulic excavator 1 based on the information received by the GPS reception unit 37. 2 position information) is calculated.
- the timer unit 8 has time information for specifying the time when the obstacle is detected by each of the sensors 31L, 31R, and 31B. Specifically, the timer unit 8 has a function of updating a preset time, and outputs the current time in response to an output instruction from the control unit 4.
- the timekeeping unit 8 is an example of a time information possessing unit.
- the storage unit 5 includes first position information (first position coordinate CP1), second position information (second position coordinate CP2), time information by the time measuring unit 8, and work of the excavator 1 by the work state detection unit 35.
- the log data shown in FIG. 11 in which the state is associated is stored.
- the storage unit 5 stores a log data table TB (see FIG. 11) shown in FIG.
- the log data table TB is a table for recording information about obstacles detected in the monitoring areas 310L, 310R, 310B (around the hydraulic excavator 1) as log data.
- the time information by the time measuring unit 8 the relative position coordinates of the obstacle with respect to the reference position RP (first position coordinates CP1), and the position coordinates of the reference position RP by the GPS receiving unit 37 ( The second position coordinate CP2) and the work state of the excavator 1 by the work state detection unit 35 are stored in association with each other.
- the first position coordinate CP1, the second position coordinate CP2, and the working state of the excavator 1 are stored in time series.
- step S ⁇ b> 1 the control unit 4 acquires the relative angle ⁇ between the lower traveling body 2 and the upper swing body 3 from the angle detection unit 33.
- step S ⁇ b> 2 the control unit 4 (monitoring region setting unit 4 b) determines whether the lower traveling body 2 is located in the detection region of each sensor 31 ⁇ / b> L, 31 ⁇ / b> R, 31 ⁇ / b> B based on the relative angle ⁇ detected by the angle detection unit 33. It is determined whether or not, and the monitoring areas 310L, 310R, 310B are set.
- the monitoring areas 310L, 310R, 310B Is set in the range shown in FIGS.
- the monitoring areas 310L, 310R, 310B Is set in the range shown in FIGS. 7 and 8, for example.
- step S3 the control unit 4 operates the left sensor 31L, the right sensor 31R, and the rear sensor 31B, and determines whether an obstacle is detected by the monitoring areas 310L, 310R, and 310B.
- the distance from each sensor 31L, 31R, 31B to the obstacle is also detected.
- the processes of steps S1 to S3 are repeated.
- step S4 the control unit 4 acquires the current time of the time measuring unit 8 as the time when the obstacle is detected.
- step S5 the control unit 4 (first calculation unit 4a) performs first obstacle detection with respect to the reference position RP of the excavator 1 based on the detection results of the sensors 31L, 31R, and 31B.
- a position coordinate CP1 (first position information) is calculated. Specifically, the control unit 4 calculates the coordinates (x1, y1, z1) of the obstacle when the three-dimensional coordinates of the reference position RP are (0, 0, 0) as the first position coordinates CP1.
- the first position coordinate CP1 is an example of first position information.
- step S6 the control unit 4 determines the GPS coordinates of the reference position RP of the excavator 1 based on the information received by the GPS receiving unit 37 to identify the second position coordinate CP2 of the reference position RP at the work site. Calculated as two-position coordinates CP2 (X1, Y1, Z1).
- the second position coordinate CP2 is an example of second position information.
- step S7 the work state detection unit 35 detects the work state (working or stopped) of the hydraulic excavator 1, and the detection result is input to the control unit 4.
- step S8 the control unit 4 determines the time acquired in step S4, the first position coordinate CP1 calculated in step S5, the second position coordinate CP2 calculated in step S6, and the work state detected in step S7.
- the associated log data is created and recorded in the log data table TB shown in FIG.
- the control unit 4 records the log data in the log data table TB in chronological order from the oldest one.
- step S9 the control unit 4 determines whether or not an obstacle is detected in the monitoring areas 310L, 310R, and 310B based on the detection results of the sensors 31L, 31R, and 31B.
- the control unit 4 executes the above-described steps S4 to S8 again. That is, during a period in which obstacles exist in the monitoring areas 310L, 310R, and 310B, the control unit 4 repeats recording log data at a predetermined interval.
- the control unit 4 ends the log data recording process.
- log data regarding obstacles is recorded in time series in the log data table TB shown in FIG.
- the control unit 4 also executes an alarm output process in addition to the log data recording process described above.
- an alarm output process in addition to the log data recording process described above.
- the configuration of the excavator 1 for performing the alarm output process will be described.
- the storage unit 5 stores a boundary BD set in the vicinity of the excavator 1 as shown in FIG.
- This boundary BD is set separately from the above-described monitoring areas 310L, 310R, 310B.
- the boundary BD is set in advance in the detection area of each sensor 31L, 31R, 31B that can detect the presence or absence of an obstacle and the distance to the obstacle.
- the storage unit 5 stores the coordinates of the boundary BD with respect to the reference position RP.
- the control unit 4 includes a counting unit 4 e that counts the number of times the obstacle approaches the hydraulic excavator 1 beyond the boundary BD. Specifically, the counting unit 4e determines the obstacle based on the first position coordinate CP1 of the obstacle with respect to the reference position RP calculated by the first calculation unit 4a and the coordinates of the boundary BD stored in the storage unit 5. It is determined whether or not an object is close to the excavator 1 beyond the boundary BD.
- the counting unit 4e counts (increments) the number of times of approach, and the number of times of approach exceeds a preset threshold value. In this case, an instruction to perform an alarm is output to an alarm output unit 9 described later.
- the warning output unit 9 outputs a warning to the operator of the hydraulic excavator 1 when the number of times of proximity counted by the counting unit 4e exceeds a threshold value. Specifically, the alarm output unit 9 outputs an alarm with a buzzer sound in response to an output instruction from the control unit 4 (count unit 4e).
- the alarm output unit 9 can be configured by an alarm buzzer.
- steps S1 to S3 in FIG. 12 are the same as steps S1 to S3 in FIG. 9, and thus description thereof is omitted.
- step S10 When an obstacle is detected in the monitoring areas 310L, 310R, 310B (S3: YES), in step S10, the control unit 4 (first calculation unit 4a) is based on the detection results by the sensors 31L, 31R, 31B. Thus, the first position coordinate CP1 of the obstacle with respect to the reference position RP of the excavator 1 is calculated. Since the process of step S10 is the same as step S5 of FIG. 9, the description thereof is omitted.
- step S11 the control unit 4 (counting unit 4e) determines that the obstacle exceeds the boundary BD based on the coordinates of the boundary BD stored in the storage unit 5 and the first position coordinates CP1 calculated in step S5. It is determined whether or not the excavator 1 is close.
- step S1 if it is determined that the obstacle is not close to the excavator 1 beyond the boundary BD (S11: NO), the process returns to step S1.
- control unit 4 (counting unit 4e) sets one counter indicating the number of times of proximity in step S12. Increment. Note that the initial value of the counter indicating the number of times of proximity is set to “0”.
- step S13 the control unit 4 (counting unit 4e) determines whether or not the proximity count exceeds a preset threshold value. If the proximity count is equal to or less than the threshold value (S13: NO), the processing is performed. The process returns to step S1.
- step S14 the control unit 4 (counting unit 4e) outputs an instruction to perform an alarm to the alarm output unit 9, and the alarm An alarm by the output unit 9 is output for a certain time.
- step S15 a counter indicating the number of times of proximity is initialized (that is, set to “0”), and the process returns to step S1.
- the hydraulic excavator 1 also has a function of displaying a work site diagram on the display unit 6 (see FIG. 3).
- a configuration for displaying a work site diagram will be described.
- the storage unit 5 further stores work site map data.
- the map data of the work site includes information on the position and size of the work site (information including latitude, longitude, elevation, shape, area, etc.) and the position of the installation (walls, utility poles, etc.) installed at the work site. And information on the size (information including latitude, longitude, shape, size, etc.).
- the second calculation unit 4d calculates the position (coordinates) of the obstacle on the work site based on the first position coordinates CP1 and the second position coordinates CP2 associated with the log data and the map data.
- control unit 4 includes a generation unit 4c that generates a work site map based on the map data stored in the storage unit 5. Specifically, the generation unit 4c determines the shape of the work site based on the information on the position and size of the work site and the information on the position and size of the installed object installed in the work site, which are included in the map data. In addition, the position and size of the installation object at the work site are specified, and a work site map for describing them is generated.
- the excavator 1 includes a display unit 6 for displaying the work site diagram generated by the generation unit 4 c and the position of the obstacle on the work site calculated by the second calculation unit 4 d. Is further provided.
- the display unit 6 is a display such as an LCD provided in the cabin 3b, and has a function of displaying various screens.
- the hydraulic excavator 1 also includes an input unit 10 for inputting a command for causing the display unit 6 to display the work site map and the position of the obstacle in the work site map to the control unit.
- the control unit 4 In response to the operator in the cabin 3 b operating the input unit 10, the control unit 4 outputs to the display unit 6 a command for displaying a work site map and an obstacle.
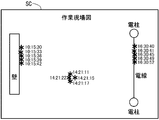
- the screen SC includes a work site map corresponding to a plan view of the work site, an obstacle (indicated by an asterisk) arranged on the work site map, and an obstacle detection time arranged adjacent to the * mark. , Including.
- the obstacle detection time can be omitted on the screen SC.
- step S16 the control unit 4 waits for an instruction to display a work site map to be input by operating the input unit 10 by an operator in the cabin 3b.
- control unit 4 When it is determined that the display instruction of the work site diagram has been input (S16: NO), the control unit 4 (generation unit 4c) reads the map data stored in the storage unit 5 (step S17), and the work site. A figure is generated (step S18).
- step S19 the control unit 4 (second calculation unit 4d) reads log data from the log data table TB in the storage unit 5.
- step S20 the control unit 4 (second calculation unit 4d) calculates the coordinates of the obstacle in the work site map based on the first position coordinates CP1 and the second position coordinates CP2.
- step S21 the control unit 4 (second calculation unit 4d) displays the work site map and the screen SC (FIG. 12) showing the position of the obstacle ("*" mark) in the work site map. 6 to display.
- the “*” mark present along the outline of the wall or electric wire indicates that the wall or electric wire is detected as an obstacle.
- those who look at the work site map indicate that the “*” mark that exists along the outline of the wall or wire means the wall or wire. I can understand that.
- the “*” mark which is present in the approximate center of the work site diagram, that is, in the portion where there is no installation such as walls, utility poles, and electric wires, is an obstacle for workers approaching the excavator 1 and other obstacles. It is detected as an object. A person who looks at this work site diagram can understand that there are some obstacles in the work site where there is no installation.
- the excavator 1 includes a communication unit 7 that can transmit and receive data including log data to and from an external device OM via a network N (for example, a mobile phone communication network).
- the communication unit 7 exchanges data with the external device OM in response to a command from the control unit 4.
- the communication unit 7 is generated not only by log data but also by information stored in the storage unit 5, information calculated by the control unit 4, and the control unit 4 in response to a command from the control unit 4.
- Information (including the work site diagram and the number of counts by the counting unit 4e) can be transmitted to the external device OM.
- the log data in which the time when the obstacle is detected and the first position coordinate CP1 are associated is recorded in time series. Therefore, it is possible to grasp not only the position of the obstacle but also the time zone when the obstacle is detected.
- the upper swing body 3 is swung at a specific angle to be within the detection area of each sensor 31L, 31R, and 31B.
- the lower traveling body 2 may enter and the lower traveling body 2 may be erroneously detected as an obstacle. Therefore, as described above, it is determined whether or not the lower traveling body 2 is located in the detection area based on the relative angle ⁇ by the angle detection unit 33, and when the lower traveling body 2 is located in the detection area.
- the area excluding the lower traveling body 2 from the detection area to the monitoring areas 310L, 310R, and 310B, it is possible to suppress the occurrence of the erroneous detection as described above.
- the second position coordinate CP2 which is the GPS coordinate of the reference position RP of the excavator 1
- the log data so that only the relative position of the obstacle with respect to the excavator 1 is used. It is also possible to grasp the absolute position of the obstacle.
- the work state (working or stopped) of the excavator 1 is further associated with the log data, it is possible to grasp the work state of the excavator 1 when an obstacle is detected. Is possible.
- the communication unit 7 that can transmit log data to the external device OM via the network N since the communication unit 7 that can transmit log data to the external device OM via the network N is provided, a third party other than the operator (such as an on-site supervisor) makes an obstacle close to the excavator 1. It becomes possible to grasp in real time.
- a third party other than the operator such as an on-site supervisor
- an alarm when an obstacle is detected, an alarm is not simply output, but the position of the obstacle is stored as log data associated with the time when the obstacle is detected. Therefore, not only the operator but also a third party on-site supervisor can grasp the position of the obstacle and the time zone when the obstacle is detected.
- the log data is recorded in time series, whether or not the obstacle is a stationary object, and if the obstacle is not a stationary object, the movement of the obstacle (that is, a hydraulic excavator). It is also possible to grasp whether it is approaching 1 or away.
- the safety management of the work at the work site can be efficiently performed.
- a work site map can be generated by the generation unit 4c based on the map data stored in the storage unit 5.
- the case where the monitoring areas 310L, 310R, and 310B are set based on the relative angle ⁇ calculated by the angle detection unit 33 is illustrated.
- the ranges shown in FIGS. 5 and 6 are set in the monitoring areas 310L, 310R, and 310B.
- the ranges shown in FIGS. 7 and 8 are set in the monitoring areas 310L, 310R, and 310B.
- the present invention is not limited to this.
- a range designated in advance may be uniformly set as the monitoring area.
- log data is recorded in the log data table TB in the storage unit 5
- the recording destination of the log data is not limited to the storage unit 5.
- the log data may be transmitted to the designated external device via the communication unit 7 and recorded in the external device.
- a third party other than the operator such as a field supervisor
- log data may be recorded in both the storage unit 5 and the external device.
- the criterion for determining whether or not to count is not limited to the boundary BD.
- the number of times that an obstacle has entered the monitoring areas 310L, 310R, and 310B may be counted as the proximity number without setting the boundary BD.
- the time, the first position coordinate CP1, the second position coordinate CP2, and the work state are associated with each other, but the association target is not limited to these.
- the orientation data received by the GPS receiving unit 37 may be further associated in the log data. In this way, it is possible to grasp in which direction the upper swing body 3 is directed and the obstacle is detected.
- a two-dimensional map is illustrated as an example of the work site diagram, but the work site diagram is not limited to the two-dimensional map.
- the work site map may be a three-dimensional map.
- the present invention is a construction machine, which is a lower traveling body, an upper revolving body that is disposed on the lower traveling body and is rotatable with respect to the lower traveling body, and the construction machine
- An obstacle detection sensor that detects the presence or absence of an obstacle in a monitoring area set in advance around the obstacle and a distance to the obstacle, and a reference that is preset for the construction machine based on a detection result by the obstacle detection sensor
- a first calculation unit that calculates first position information including position coordinates of the obstacle with respect to a position; a time information possessing unit that includes time information for specifying a time when the obstacle is detected; and the first position.
- a construction machine including a storage unit that stores log data in which information and the time information are associated with each other.
- the log data in which the time when the obstacle is detected and the first position information are associated is recorded in the storage unit in time series. Therefore, it is possible to grasp not only the position of the obstacle but also the time zone when the obstacle is detected.
- the obstacle detection sensor has a detection region capable of detecting the presence / absence of the obstacle and a distance to the obstacle, and is provided in the upper swing body, and the construction machine is provided with the upper swing body.
- An angle detection unit that detects a relative angle between the lower traveling body and the upper swinging body in a turning direction, and whether the lower traveling body is positioned in the detection area based on the relative angle detected by the angle detection unit
- a monitoring area setting unit that determines whether or not the lower traveling body is excluded from the detection area when the lower traveling body is located in the detection area. Is preferred.
- the lower turning body enters the detection area of the obstacle detection sensor by turning the upper turning body at a specific angle, and the lower running body becomes the obstacle. May be mistakenly detected. Therefore, as in the above-described aspect, it is determined whether or not the lower traveling body is located in the detection area based on the relative angle by the angle detection unit. By setting the area excluding the lower traveling body as the monitoring area, it is possible to suppress the occurrence of the erroneous detection as described above.
- the construction machine further includes a position information receiving unit that receives information for specifying second position information including the position coordinates of the reference position, and the storage unit further associates the second position information with the log. It is preferred to store the data.
- the second position coordinates including the position coordinates of the reference position of the excavator 1 are further associated with the log data, not only the relative position of the obstacle with respect to the construction machine but also the absolute position of the obstacle. It is possible to grasp the correct position.
- the construction machine further includes a work state detection unit that detects a work state indicating whether the construction machine is in a working state or a stopped state, and the storage unit further associates the working state. It is preferable to store log data.
- the construction machine further includes a communication unit capable of transmitting the log data to an external device via a network.
- the storage unit further stores map data of a work site, and the construction machine includes the first position information and the second position information associated with the log data, the map data, A second calculation unit that calculates the position of the obstacle on the work site, a work site diagram generated based on the map data, and the work site map calculated by the second calculation unit. It is preferable to further include a display unit for displaying the position of the obstacle.
- the safety management of the work at the work site can be efficiently performed.
- the construction machine may further include a generation unit that generates the work site map based on the map data.
- the work site map can be generated by the generation unit based on the map data stored in the storage unit.
- the information processing apparatus further includes a counting unit that counts a warning and a warning output unit that outputs a warning to an operator of the construction machine when the number of times of proximity exceeds a preset threshold value.
- a warning is output, so that the operator can reliably recognize that the obstacle is approaching. it can.
Landscapes
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Structural Engineering (AREA)
- General Engineering & Computer Science (AREA)
- Civil Engineering (AREA)
- Mining & Mineral Resources (AREA)
- Remote Sensing (AREA)
- Radar, Positioning & Navigation (AREA)
- General Physics & Mathematics (AREA)
- Electromagnetism (AREA)
- Computer Networks & Wireless Communication (AREA)
- Mechanical Engineering (AREA)
- Aviation & Aerospace Engineering (AREA)
- Automation & Control Theory (AREA)
- Component Parts Of Construction Machinery (AREA)
Abstract
Description
Claims (8)
- 建設機械であって、
下部走行体と、
前記下部走行体上に配置され、前記下部走行体に対して旋回可能な上部旋回体と、
前記建設機械の周囲に予め設定された監視領域における障害物の有無及び障害物までの距離を検知する障害物検知センサと、
前記障害物検知センサによる検知結果に基づいて、前記建設機械に予め設定された基準位置に対する前記障害物の位置座標を含む第1位置情報を算出する第1算出部と、
前記障害物が検知された時刻を特定するための時刻情報を有する時刻情報所持部と、
前記第1位置情報と前記時刻情報とを関連付けたログデータを記憶する記憶部と、
を備えている、建設機械。 A construction machine,
A lower traveling body,
An upper revolving structure that is disposed on the lower traveling structure and is capable of revolving with respect to the lower traveling structure;
An obstacle detection sensor for detecting the presence or absence of an obstacle in the monitoring area set in advance around the construction machine and the distance to the obstacle;
A first calculation unit that calculates first position information including position coordinates of the obstacle with respect to a reference position preset in the construction machine, based on a detection result by the obstacle detection sensor;
A time information possessing unit having time information for specifying the time when the obstacle is detected;
A storage unit for storing log data in which the first position information and the time information are associated;
Equipped with construction machinery. - 前記障害物検知センサは、前記障害物の有無及び障害物までの距離を検知可能な検知領域を有するとともに前記上部旋回体に設けられ、
前記建設機械は、
前記上部旋回体の旋回方向における前記下部走行体と前記上部旋回体との相対角度を検出する角度検出部と、
前記角度検出部によって検出された前記相対角度に基づいて前記検知領域内に下部走行体が位置するか否かを判定し、前記検知領域内に前記下部走行体が位置する場合に前記検知領域から前記下部走行体を除く領域を前記監視領域に設定する監視領域設定部と、を更に備えている、請求項1に記載の建設機械。 The obstacle detection sensor has a detection region capable of detecting the presence and absence of the obstacle and the distance to the obstacle, and is provided in the upper swing body,
The construction machine is
An angle detection unit for detecting a relative angle between the lower traveling body and the upper swing body in the turning direction of the upper swing body;
Based on the relative angle detected by the angle detection unit, it is determined whether or not the lower traveling body is located in the detection area, and when the lower traveling body is located in the detection area, the detection area The construction machine according to claim 1, further comprising a monitoring area setting unit that sets an area excluding the lower traveling body as the monitoring area. - 前記建設機械は、前記基準位置の位置座標を含む第2位置情報を特定するための信号を受信する位置情報受信部を更に備え、
前記記憶部は、前記第2位置情報を更に関連付けた前記ログデータを記憶する、請求項1又は2に記載の建設機械。 The construction machine further includes a position information receiving unit that receives a signal for specifying second position information including position coordinates of the reference position,
The construction machine according to claim 1, wherein the storage unit stores the log data further associated with the second position information. - 前記建設機械は、前記建設機械が作業中と停止中との何れの状態であるかを示す作業状態を検知する作業状態検知部を更に備え、
前記記憶部は、前記作業状態を更に関連付けた前記ログデータを記憶する、請求項1から3のうち何れか一項に記載の建設機械。 The construction machine further includes a work state detection unit that detects a work state indicating whether the construction machine is in a working state or a stopped state,
The construction machine according to any one of claims 1 to 3, wherein the storage unit stores the log data further associated with the work state. - 前記建設機械は、ネットワークを介して前記ログデータを外部機器に送信可能な通信部を更に備えている、請求項1から4のうち何れか一項に記載の建設機械。 The construction machine according to any one of claims 1 to 4, further comprising a communication unit capable of transmitting the log data to an external device via a network.
- 前記記憶部は、作業現場の地図データを更に記憶しており、
前記建設機械は、
前記ログデータに関連付けられた前記第1位置情報及び前記第2位置情報と前記地図データとに基づいて、前記作業現場における前記障害物の位置を算出する第2算出部と、
前記地図データに基づいて生成される作業現場図と、前記第2算出部によって算出された前記作業現場における前記障害物の位置と、を表示するための表示部と、を更に備えている、請求項3に記載の建設機械。 The storage unit further stores work site map data,
The construction machine is
A second calculation unit for calculating the position of the obstacle on the work site based on the first position information and the second position information associated with the log data and the map data;
A display unit configured to display a work site diagram generated based on the map data and a position of the obstacle on the work site calculated by the second calculation unit; Item 4. The construction machine according to item 3. - 前記建設機械は、前記地図データに基づいて前記作業現場図を生成する生成部を更に備えている、請求項6に記載の建設機械。 The construction machine according to claim 6, further comprising a generation unit that generates the work site map based on the map data.
- 前記建設機械は、
前記障害物の有無及び障害物までの距離を検知可能な前記障害物検知センサの検知領域内に予め設定された境界を越えて前記障害物が前記建設機械に近接する近接回数をカウントするカウント部と、
前記近接回数が予め設定された閾値を超えた場合に前記建設機械のオペレータに警告を出力する警告出力部と、
を更に備えている、請求項1から6のうち何れか一項に記載の建設機械。 The construction machine is
A counting unit that counts the number of times the obstacle approaches the construction machine beyond a preset boundary within a detection area of the obstacle detection sensor capable of detecting the presence or absence of the obstacle and the distance to the obstacle When,
A warning output unit that outputs a warning to an operator of the construction machine when the number of times of proximity exceeds a preset threshold;
The construction machine according to any one of claims 1 to 6, further comprising:
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| NZ747654A NZ747654A (en) | 2016-04-28 | 2017-04-25 | Construction machine |
| US16/095,724 US10876275B2 (en) | 2016-04-28 | 2017-04-25 | Construction machine |
| AU2017255011A AU2017255011B2 (en) | 2016-04-28 | 2017-04-25 | Construction machine |
| CN201780025289.4A CN109072589B (en) | 2016-04-28 | 2017-04-25 | Construction machine |
| EP17789512.5A EP3450636B1 (en) | 2016-04-28 | 2017-04-25 | Construction machine |
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016090067 | 2016-04-28 | ||
| JP2016-090067 | 2016-04-28 | ||
| JP2016120614A JP6468444B2 (en) | 2016-04-28 | 2016-06-17 | Construction machinery |
| JP2016-120614 | 2016-06-17 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2017188230A1 true WO2017188230A1 (en) | 2017-11-02 |
Family
ID=60161662
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2017/016334 WO2017188230A1 (en) | 2016-04-28 | 2017-04-25 | Construction machine |
Country Status (1)
| Country | Link |
|---|---|
| WO (1) | WO2017188230A1 (en) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN109457745A (en) * | 2018-12-07 | 2019-03-12 | 上海华兴数字科技有限公司 | A kind of construction site method of controlling security |
| US20210010236A1 (en) * | 2018-03-26 | 2021-01-14 | Sumitomo Construction Machinery Co., Ltd. | Shovel |
| JPWO2021025123A1 (en) * | 2019-08-08 | 2021-02-11 | ||
| US20220042282A1 (en) * | 2019-04-26 | 2022-02-10 | Sumitomo Construction Machinery Co., Ltd. | Shovel, and safety equipment confirmation system at worksite |
Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001051057A (en) * | 1999-08-06 | 2001-02-23 | Matsushita Electric Works Ltd | Obstacle detection system for vehicle |
| JP2002290596A (en) * | 2001-03-23 | 2002-10-04 | Shin Caterpillar Mitsubishi Ltd | Motion recorder for machine, and monitoring system for machine |
| JP2007323117A (en) * | 2006-05-30 | 2007-12-13 | Kenwood Corp | Road communication system, mobile device and information processing method for mobile device |
| JP2008163719A (en) * | 2007-01-05 | 2008-07-17 | Hitachi Constr Mach Co Ltd | Circumference monitor of working machine |
| JP2010211613A (en) * | 2009-03-11 | 2010-09-24 | Omron Corp | Information processor, and information processing method, program, and system |
| WO2012144150A1 (en) * | 2011-04-19 | 2012-10-26 | マツダ株式会社 | Obstacle detection device for vehicle |
| JP2012225732A (en) * | 2011-04-19 | 2012-11-15 | Mazda Motor Corp | Obstacle detection device for vehicle |
| WO2015198410A1 (en) * | 2014-06-25 | 2015-12-30 | 株式会社日立製作所 | Outside recognition device |
-
2017
- 2017-04-25 WO PCT/JP2017/016334 patent/WO2017188230A1/en active Application Filing
Patent Citations (8)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2001051057A (en) * | 1999-08-06 | 2001-02-23 | Matsushita Electric Works Ltd | Obstacle detection system for vehicle |
| JP2002290596A (en) * | 2001-03-23 | 2002-10-04 | Shin Caterpillar Mitsubishi Ltd | Motion recorder for machine, and monitoring system for machine |
| JP2007323117A (en) * | 2006-05-30 | 2007-12-13 | Kenwood Corp | Road communication system, mobile device and information processing method for mobile device |
| JP2008163719A (en) * | 2007-01-05 | 2008-07-17 | Hitachi Constr Mach Co Ltd | Circumference monitor of working machine |
| JP2010211613A (en) * | 2009-03-11 | 2010-09-24 | Omron Corp | Information processor, and information processing method, program, and system |
| WO2012144150A1 (en) * | 2011-04-19 | 2012-10-26 | マツダ株式会社 | Obstacle detection device for vehicle |
| JP2012225732A (en) * | 2011-04-19 | 2012-11-15 | Mazda Motor Corp | Obstacle detection device for vehicle |
| WO2015198410A1 (en) * | 2014-06-25 | 2015-12-30 | 株式会社日立製作所 | Outside recognition device |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP3450636A4 * |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20210010236A1 (en) * | 2018-03-26 | 2021-01-14 | Sumitomo Construction Machinery Co., Ltd. | Shovel |
| CN109457745A (en) * | 2018-12-07 | 2019-03-12 | 上海华兴数字科技有限公司 | A kind of construction site method of controlling security |
| CN109457745B (en) * | 2018-12-07 | 2021-10-29 | 上海华兴数字科技有限公司 | Construction site safety control method |
| US20220042282A1 (en) * | 2019-04-26 | 2022-02-10 | Sumitomo Construction Machinery Co., Ltd. | Shovel, and safety equipment confirmation system at worksite |
| JPWO2021025123A1 (en) * | 2019-08-08 | 2021-02-11 | ||
| WO2021025123A1 (en) * | 2019-08-08 | 2021-02-11 | 住友建機株式会社 | Excavator and information processing device |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10876275B2 (en) | Construction machine | |
| US10544567B2 (en) | Method and system for monitoring a rotatable implement of a machine | |
| JP7037393B2 (en) | Turn control system for work vehicles | |
| JP6734260B2 (en) | Work machine | |
| WO2017188230A1 (en) | Construction machine | |
| KR20190117626A (en) | Working machine | |
| CN113728141B (en) | Excavator | |
| JPWO2019049288A1 (en) | Construction machinery | |
| JP6559464B2 (en) | Work vehicle ambient monitoring device | |
| JP2005029338A (en) | Operation monitoring system and method for construction machinery | |
| WO2021003042A1 (en) | System and method for managing tools at a worksite | |
| JP6918716B2 (en) | Construction machinery | |
| KR20220002343A (en) | Display device, shovel, information processing device | |
| JP2020051156A (en) | Work machine | |
| KR20210152493A (en) | Shovel, safety equipment confirmation system at work site | |
| JP2019190193A (en) | Work machine | |
| JP2020056169A (en) | Construction machine equipped with approach notification function on ground and underground and capable of acquiring construction data for new buried objects | |
| JP6529058B1 (en) | Construction machine management system, construction machine management program, construction machine management method, construction machine and external management device for construction machine | |
| JP6473648B2 (en) | Remote control robot | |
| KR20220002938A (en) | shovel | |
| JP7159914B2 (en) | Worker detection device, worker detection method, and worker detection program | |
| US20220389682A1 (en) | Overturning-risk presentation device and overturning-risk presentation method | |
| US12116754B2 (en) | Operation area presentation device and operation area presentation method | |
| JP7349947B2 (en) | Information processing equipment, working machines, information processing methods, information processing programs | |
| US20220375157A1 (en) | Overturning-risk presentation device and overturning-risk presentation method |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| ENP | Entry into the national phase |
Ref document number: 2017255011 Country of ref document: AU Date of ref document: 20170425 Kind code of ref document: A |
|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 17789512 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2017789512 Country of ref document: EP |
|
| ENP | Entry into the national phase |
Ref document number: 2017789512 Country of ref document: EP Effective date: 20181128 |