WO2017010177A1 - Sensor device - Google Patents
Sensor device Download PDFInfo
- Publication number
- WO2017010177A1 WO2017010177A1 PCT/JP2016/065773 JP2016065773W WO2017010177A1 WO 2017010177 A1 WO2017010177 A1 WO 2017010177A1 JP 2016065773 W JP2016065773 W JP 2016065773W WO 2017010177 A1 WO2017010177 A1 WO 2017010177A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- sensor
- oscillator
- resonators
- inspected
- state
- Prior art date
Links
Images












Classifications
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N22/00—Investigating or analysing materials by the use of microwaves or radio waves, i.e. electromagnetic waves with a wavelength of one millimetre or more
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N27/00—Investigating or analysing materials by the use of electric, electrochemical, or magnetic means
- G01N27/02—Investigating or analysing materials by the use of electric, electrochemical, or magnetic means by investigating impedance
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N27/00—Investigating or analysing materials by the use of electric, electrochemical, or magnetic means
- G01N27/72—Investigating or analysing materials by the use of electric, electrochemical, or magnetic means by investigating magnetic variables
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R27/00—Arrangements for measuring resistance, reactance, impedance, or electric characteristics derived therefrom
- G01R27/02—Measuring real or complex resistance, reactance, impedance, or other two-pole characteristics derived therefrom, e.g. time constant
- G01R27/26—Measuring inductance or capacitance; Measuring quality factor, e.g. by using the resonance method; Measuring loss factor; Measuring dielectric constants ; Measuring impedance or related variables
Definitions
- the present invention relates to a sensor device.
- a sensor IC formed of a semiconductor integrated circuit may be able to satisfy such required performance.
- Patent Document 1 discloses a measurement system that detects the amount and movement of magnetic particles in a sample.
- FIG. 16 is a diagram for explaining the sensor IC described in Patent Document 1.
- FIG. FIG. 16A is a circuit diagram illustrating a schematic configuration of the oscillator 110 and the oscillator 120 included in the sensor IC described in Patent Document 1.
- FIG. FIG. 16B is a perspective view showing a schematic configuration of the sensor IC described in Patent Document 1.
- FIG. FIG. 16C is a perspective view showing a state in which the device under test 114 is attached to the sensor IC described in Patent Document 1.
- FIG. FIG. 16D is a perspective view showing a state in which the inspection object 114 and the inspection object 124 serving as a reference are attached to the sensor IC described in Patent Document 1.
- FIG. 17 is a diagram for explaining the oscillator 110 included in the sensor IC described in Patent Document 1.
- FIG. 17A is a partial view of FIG. 16A
- FIG. 17B is a BB ′ cross-sectional view.
- the sensor IC described in Patent Document 1 includes an oscillator 110 having an inductor 111 and an oscillator 120 having an inductor 121.
- the oscillator 110 and the oscillator 120 are selectively driven by a control signal (enable or non-enable).
- a control signal enable or non-enable
- the oscillator 110 and the oscillator 120 are mounted on the semiconductor substrate 101, for example, as shown in FIG.
- FIG. 16B the part other than the inductor 111 of the oscillator 110 is shown as the other circuit 112
- the part other than the inductor 121 of the oscillator 120 is shown as the other circuit 122.
- the oscillation frequency at which the oscillator 110 oscillates due to the magnetic permeability of the magnetic particles 113 Changes. From the difference between the oscillation frequency of the reference oscillator 120 and the changed oscillation frequency of the oscillator 110, it can be detected that the magnetic particles 113 are present in the vicinity of the oscillator 110. From the presence of the magnetic particles 113, it is estimated that the test object 114 labeled with the magnetic particles 113 is present in the vicinity of the oscillator 110. In addition, as shown in FIG. 16 (d), the characteristics of the oscillation frequency response of the oscillator 110 and the oscillator 120 can be examined by using a test object 124 that is not labeled with magnetic particles.
- the inductor 111 is formed in a metal layer (metal layer). Therefore, as shown in FIG. 17B, even if the inductor 111 is formed on the uppermost metal layer 130 of the semiconductor substrate 101, an insulator or the like is provided between the surface of the semiconductor substrate 101 and the inductor 111. There is a protective film 115 formed in (1). For this reason, the device under test 114 does not directly contact the inductor 111. Similarly, the inductor 121 is also formed in the metal layer. For this reason, the device under test 124 does not directly contact the inductor 121.
- FIG. 18 shows a case where the device under test 140 adheres to a wider area than the oscillator 110 and the oscillator 120, and a case where a portion 141 and a portion 142 having different physical properties exist inside the device under test 140. .
- the oscillator 110 and the oscillator 120 cannot individually measure the physical property at the portion 141 and the physical property at the portion 142.
- the present invention has been made in view of the above problems, and its purpose is to increase the spatial resolution for detecting the distribution of physical properties of the object to be inspected over a wide range. It is also an object of the present invention to detect local changes in physical properties of the object to be inspected by increasing the spatial resolution.
- a sensor device includes a substrate and a plurality of resonators disposed on the substrate, and each of the plurality of resonators is in the vicinity of itself.
- the resonance frequency is changed according to the physical property of the object to be inspected, and the distribution of the physical property of the object to be inspected is detected based on the distribution of the plurality of resonators and the resonance frequency of each of the plurality of resonators.
- the center distance between two resonators adjacent to each other among the plurality of resonators is 300 ⁇ m or less.
- the resonator is not a narrowly-defined antenna that transmits and receives electromagnetic waves, and is not restricted by the aperture diameter depending on the wavelength, so that the area can be reduced.
- substrate can be raised by the area reduction of a resonator. Therefore, it is possible to detect the distribution of physical properties of the object to be inspected in a wide range and increase the spatial resolution. And since it is not restricted by the wavelength, it is possible to detect local changes in the physical properties of the object to be inspected with a high spatial resolution that cannot be realized when narrowly defined antennas are arranged in an array.
- the object to be inspected need not be labeled with magnetic particles or the like. For this reason, the measurement work can be simplified.
- the arrangement density of the resonators can be increased. For this reason, the sensor device can be miniaturized. Alternatively, the spatial resolution of the sensor device can be increased.
- FIG. 2A is a circuit diagram showing a schematic configuration of the oscillator.
- FIG. 2B is a cross-sectional view taken along the line AA ′ showing a schematic configuration of the oscillator. It is a figure which shows the 2nd state to which the to-be-inspected object has adhered to the surface of sensor IC contained in the sensor apparatus shown in FIG. It is a figure for demonstrating the oscillation frequency of an oscillator in the sensor apparatus shown in FIG.
- FIG. 4A is a diagram showing the oscillation frequency of the first state oscillator
- FIG. 4B is a diagram showing the oscillation frequency of the second state oscillator with respect to the first state.
- It is a circuit diagram which shows another schematic structure of the oscillator contained in the sensor apparatus shown in FIG.
- It is a circuit diagram which shows another schematic structure of the oscillator contained in the sensor apparatus shown in FIG.
- It is a figure which shows the 3rd state to which the to-be-inspected object has adhered to the surface of sensor IC of the sensor apparatus shown in FIG.
- FIG. 3 is a diagram illustrating an oscillation frequency of an oscillator in a third state with respect to a second state in the sensor device illustrated in FIG. 1.
- FIG. 6 is a diagram illustrating an oscillation frequency of an oscillator in a fourth state with respect to a second state in the sensor device illustrated in FIG. 1.
- FIG. 2 is a schematic diagram for explaining control for sequentially driving unit cells A11 to ALM included in the sensor device 100 shown in FIG.
- FIG. 2 is a schematic diagram for explaining control for sequentially driving unit cells A11 to ALM included in the sensor device 100 shown in FIG.
- FIG. 2 is a perspective view which shows schematic structure of another sensor IC contained in the sensor apparatus 100 shown in FIG. 1, and is a figure which shows the 1st state where the surface of sensor IC is clean.
- FIG. 16A is a circuit diagram illustrating a schematic configuration of a plurality of oscillators included in the sensor IC described in Patent Document 1.
- FIG. 16B is a perspective view showing a schematic configuration of the sensor IC described in Patent Document 1.
- FIG. 16C is a perspective view showing a state in which an object to be inspected is attached to the sensor IC described in Patent Document 1.
- FIG. FIG. 16D is a perspective view showing a state in which the object to be inspected and the reference object to be inspected are attached to the sensor IC described in Patent Document 1.
- 6 is a diagram for explaining an oscillator included in a sensor IC described in Patent Document 1.
- FIG. 17A is a perspective view partially showing FIG. 16A
- FIG. 17B is a cross-sectional view along BB ′. It is a figure explaining the problem of the sensor IC described in Patent Document 1.
- the object to be inspected adheres to a wider range than the plurality of oscillators, and there are a plurality of parts having different physical properties inside the object to be inspected If you want to:
- Embodiment 1 Embodiment 1 of the present invention will be described below with reference to FIGS.
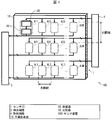
- FIG. 1 is a perspective view showing a schematic configuration of a sensor device 100 according to the present invention, and shows a first state in which the surface of a sensor IC 1 of the sensor device 100 is clean.
- the sensor device 100 includes a sensor IC 1, a detection circuit 3, and a control circuit 4.
- the sensor IC 1 is an integrated circuit for sensors (IntegratedirCircuit).
- the sensor IC1 includes a semiconductor substrate 10 and a plurality of unit cells A11 to ALM.
- Each of the unit cells A11 to ALM is a circuit formed on the semiconductor substrate 10.
- the plurality of unit cells A11 to ALM are arranged in a matrix form having L rows and M columns and having a row interval and a column interval of 300 ⁇ m or less.
- Each of unit cells A11 to ALM has the same configuration and includes an oscillator 20 and a frequency divider 30, respectively.
- the frequency divider 30 is a frequency divider that divides the oscillation frequency oscillated by the oscillator 20, and is provided in a one-to-one correspondence with the oscillator 20.
- the frequency dividing ratio of the frequency divider 30 is 1 / N (N is a rational number of 1 or more).
- the frequency divider 30 sets the frequency of the signal input to the detection circuit 3 to 1 / N times the oscillation frequency of the oscillator 20 so that the detection circuit 3 can easily handle the signal input to the detection circuit 3. As a result, the frequency of the signal input to the detection circuit 3 falls within the frequency band in which the detection circuit 3 operates.
- the control circuit 4 is a circuit that outputs a control signal (enable or non-enable) for selectively driving the plurality of unit cells A11 to ALM, and the driving unit cell is a plurality of unit cells A11 to ALM. It is grasped which is.
- the detection circuit 3 calculates the oscillation frequency of the oscillator 20 by adding the reciprocal number N of the frequency division ratio of the frequency divider 30 to the frequency of the signal output from the unit cell being driven.
- the control circuit 4 and the detection circuit 3 may be formed on the semiconductor substrate 10 or may be formed on a member different from the semiconductor substrate 10.
- FIG. 2 is a diagram for explaining a schematic configuration of the oscillator 20 included in the sensor device 100 shown in FIG.
- FIG. 2A is a circuit diagram showing a schematic configuration of the oscillator 20.
- FIG. 2B is an AA ′ cross-sectional view showing a schematic configuration of the oscillator 20.
- the oscillator 20 includes a differential circuit 40, a resonator 50 formed between the differential circuits 40, and a current source 60 that controls driving of the oscillator 20 according to a control signal.
- the oscillation frequency that the oscillator 20 oscillates is 30 GHz or more and 200 GHz or less.
- the differential circuit 40 includes an NMOS transistor M1 and an NMOS transistor M2 that are cross-coupled to each other. Note that another differential circuit may be used as appropriate. For example, a bipolar transistor may be used.
- the resonator 50 includes an inductor 52 and a capacitor 54 connected in parallel between the differentials of the differential circuit 40.
- the resonance frequency at which the resonator 50 resonates is the oscillation frequency at which the oscillator 20 oscillates. Since the resonator 50 is not a narrowly defined antenna that transmits and receives electromagnetic waves, the resonator 50 is not limited by the aperture diameter due to the wavelength. For this reason, the size of the resonator 50 can be set to 200 ⁇ m square or less (a size that fits in a square having a side of 200 ⁇ m), which is smaller than a quarter wavelength of a wavelength of about 1.5 mm of an electromagnetic wave of 200 GHz.
- the inductor 52 is formed in the uppermost layer (the layer closest to the contact position between the substrate and the object to be inspected) among the metal layers of the semiconductor substrate 10.
- the inductor 52 occupies most of the circuit size of the resonator 50.
- the resonator 50 occupies most of the circuit size of the oscillator 20.
- the area of the inductor 52 is determined so that the size of the resonator 50 in a plan view is a size that fits in a square having a side of 200 ⁇ m.
- the capacitor 54 may be formed by gate capacitances of the transistors M1 and M2, parasitic capacitances of wirings not shown, and the like.
- the inductor 52 is covered with a protective film 15 formed of an insulator or the like. For this reason, moisture, an object to be inspected, and the like do not directly contact the inductor 52. Since the inductor 52 is formed in the metal layer that is the uppermost layer, the resonance frequency of the resonator 20 changes due to the water molecules near the surface of the semiconductor substrate 10 and the water state related to the object to be inspected. To do. More specifically, the dielectric constant around the metal layer, which is the uppermost layer, changes due to changes in the state of water associated with water molecules and the object to be inspected. As a result, the parasitic capacitance value that affects the resonator 20 changes.
- At least one of the inductor 52 and the capacitor 54 includes a metal layer that is the uppermost layer, and a capacitance that affects the one. It only has to change the value.
- the inductor 52 and the capacitor 54 form an LC circuit, and the resonance frequency of the resonator 50 and the oscillation frequency of the oscillator 20 are determined by the inductance of the inductor 52 and the capacitance of the capacitor 54. For example, when the inductance of the inductor 52 is around 1 nH and the capacitance of the capacitor 54 is around 27 fF, the resonance frequency of the resonator 50 and the oscillation frequency of the oscillator 20 are around 30 GHz.
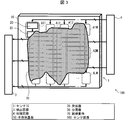
- FIG. 3 is a diagram showing a second state in which the device under test 70 is attached to the surface of the sensor IC 1 included in the sensor device 100 shown in FIG.
- the test object 70 is a sample containing moisture, and examples thereof include various types of cells, proteins, inorganic aqueous solutions, and organic aqueous solutions.
- the control circuit 4 selectively drives and drives the plurality of unit cells A11 to ALM with the surface of the sensor IC 1 clean (first state) as shown in FIG.
- the detection circuit 3 measures the frequency of the signal output from the unit cell. Then, the detection circuit 3 calculates the oscillation frequency of the oscillator 20 by accumulating the reciprocal number N of the frequency division ratio of the frequency divider 30 to the frequency of the measured signal.
- the object 70 is adhered to the surface of the sensor IC1. Then, as shown in FIG. 3, the dielectric constant of the surface of the semiconductor substrate 10 changes due to moisture contained in the device under test 70, and the oscillation frequency of the oscillator 20 changes.
- FIG. 4 is a diagram for explaining the oscillation frequency of the oscillator 20 in the sensor device 100 shown in FIG. 4A is a diagram showing the oscillation frequency of the oscillator 20 in the first state
- FIG. 4B is a diagram showing the oscillation frequency of the oscillator 20 in the second state with respect to the first state.
- the detection circuit 3 calculates a difference ⁇ f of the oscillation frequency of the oscillator 20 between the first state and the second state when the control circuit 4 is driven. By detecting the presence / absence of moisture contained in the test object 70 in the vicinity of the unit cell based on the oscillation frequency difference ⁇ f, the presence / absence of the test object 70 in the vicinity of the unit cell can be detected. For example, when the oscillation frequency difference ⁇ f is less than a predetermined threshold, it is determined that the device under test 70 does not exist in the vicinity of the unit cell, and when the oscillation frequency difference ⁇ f is equal to or greater than the predetermined threshold, the vicinity of the unit cell. It is determined that the inspected object 70 exists.
- the object 70 is attached. Can be detected. Therefore, since the sensor device 100 can individually detect the presence / absence of the inspected object 70 for each of the unit cells A11 to ALM, the inspected object can be detected with a resolution corresponding to the distribution density (arrangement density) of the unit cells A11 to ALM. 70 distributions can be detected.
- the resonator 50 Since the resonator 50 is not a narrowly-defined antenna that transmits and receives electromagnetic waves, the resonator 50 can be reduced in size without being restricted by the aperture diameter depending on the wavelength. Further, since the sensor IC1 uses the resonator 50, the area can be reduced. Specifically, the size of the resonator 50 can be reduced to 200 ⁇ m square or less (a size that fits in a square having a side of 200 ⁇ m). Note that the maximum diameter (diagonal length, approximately 283 ⁇ m) of a 200 ⁇ m square (a square having a side of 200 ⁇ m) is smaller than a quarter wavelength (approximately 375 ⁇ m) of a wavelength of 200 GHz electromagnetic wave of approximately 1.5 mm.
- the resonator 50 occupies most of the oscillator 20 in a plan view and occupies most of each of the unit cells A11 to ALM. For this reason, by reducing the area of the resonator 50, the oscillator 20 is reduced in area, and each of the unit cells A11 to ALM is reduced in area. This increases the number of unit cells that can be arranged per area of the semiconductor substrate 10. Furthermore, since the arrangement density of the unit cells A11 to ALM is high, a more precise distribution of the inspected object 70 can be detected. Specifically, since the resonator 50 can be 200 ⁇ m square or less, the arrangement interval of the resonators 50 (the row interval and the column interval when arranged in a matrix) can be 300 ⁇ m or less. In other words, the distance between the centers of two resonators (50) adjacent to each other can be set to 300 ⁇ m or less.
- the change in the resonance frequency of the resonator 50 (the oscillation frequency of the oscillator 20) is caused by the change in the dielectric constant of the surface of the semiconductor substrate 10, but the present invention is not limited to this.
- the resonance frequency of the resonator 50 may be changed.
- the resonance frequency of the resonator 50 may be changed due to a change in magnetic permeability. Therefore, the sensor device according to the present invention can detect the distribution of physical properties (dielectric constant, magnetic permeability) of the object to be inspected and the distribution of the state of the object to be inspected that affects the physical properties (dielectric constant, magnetic permeability). .
- test object 70 it is not necessary to label the test object 70 with magnetic particles. For this reason, the measurement work can be simplified.
- the operating frequency is 1.1 GHz to 3.3 GHz based on FIG. 16.8.1 of the non-patent document.
- the sensor IC described in Patent Document 1 has no sensitivity in a high frequency band exceeding 10 GHz.
- FIG. 2 is a graph showing the complex dielectric constant of bulk water.
- the fluctuation of the complex dielectric constant is particularly large in the frequency range of 30 GHz to 200 GHz. It is suggested that when the amount of bulk water varies, the complex dielectric constant also varies in the above-described frequency region.
- Patent Document 1 and Non-Patent Document 1 have an evaluation frequency of 1.1 GHz to 3.3 GHz, and therefore cannot evaluate the movement of water molecules in bulk water and cannot represent a hydration state. Absent. This is because the movement of water molecules is as large as about 10 GHz or more. Therefore, the operation of the object to be inspected is confirmed by labeling the object to be inspected with magnetic particles and evaluating at 1.1 GHz to 3.3 GHz suitable for the frequency fluctuation of the magnetic particles. For this reason, labeling with magnetic particles (addition of magnetic particles) is required.
- the sensor device 100 of this embodiment measures a change in the inspected object 70 such as a sample containing an aqueous solution and moisture. be able to.
- FIG. 5 is a circuit diagram showing another schematic configuration of the oscillator 20 included in the sensor device 100 shown in FIG.
- the oscillator 20 includes a differential circuit 40, a resonator 50 formed between the differential circuits 40, and a current source 60 that controls driving of the oscillator 20 according to a control signal.
- the capacitor 54 is formed in the uppermost metal layer among the metal layers of the semiconductor substrate 10 (similar to the inductor 52 in FIG. 2B). In plan view, the capacitor 54 is a large part of the area occupied by the oscillator 20 on the semiconductor substrate 10 and is formed in a comb shape.
- the inductor 52 may be formed in a metal layer that is not the uppermost layer, and may be an active inductor or the like constituted by a transistor.
- the capacitance of the capacitor 54 changes due to moisture adhering to the surface of the semiconductor substrate 10 and the object to be inspected. And the oscillation frequency which the oscillator 20 oscillates changes.
- FIG. 6 is a circuit diagram showing another schematic configuration of the oscillator 20 included in the sensor device 100 shown in FIG.
- the oscillator 20 includes a differential circuit 40, a resonator 50 formed between the differential circuits 40, and a current source 60 that controls driving of the oscillator 20 according to a control signal.
- a differential circuit 42 connected between the current source 60 is included.
- the differential circuit 42 includes a PMOS transistor M3 and a PMOS transistor M4 that are cross-coupled to each other. Note that another differential circuit may be used as appropriate. For example, a bipolar transistor may be used.
- the resonator 50 is sandwiched between the differential circuit 40 and the differential circuit 42. For this reason, the voltage of the current that resonates in the resonator 50 does not exceed the power supply voltage VDD.
- Embodiment 2 of the present invention will be described below with reference to FIGS.
- members having the same functions as those described in the embodiment are given the same reference numerals, and descriptions thereof are omitted.
- FIG. 7 is a diagram showing a third state in which the device under test 71 is attached to the surface of the sensor IC 1 of the sensor device 100 shown in FIG.
- the state of water related to the object to be inspected 70 changes with the passage of time (for example, increase / decrease in bulk water due to a change in the hydration state and the content of the object 70 to be inspected). Evaporating water).
- the physical properties (dielectric constant, etc.) and shape of the inspected object 70 change, and the inspected object 70 changes to the inspected object 71 having different physical properties or shapes.
- the detection circuit 3 is driven by the control circuit 4 in the state (third state) in which the test object 71 is attached to the surface of the sensor IC 1 as in the first state and the second state.
- the frequency of the signal output from the unit cell is measured, and the oscillation frequency of the oscillator 20 is calculated.
- FIG. 8 is a diagram showing the oscillation frequency of the oscillator 20 in the third state with respect to the second state in the sensor device 100 shown in FIG. Along with the change from the inspection object 70 to the inspection object 71, the oscillation frequency of the oscillator 20 also changes.
- the detection circuit 3 calculates a difference ⁇ f ′ of the oscillation frequency of the oscillator 20 between the second state and the third state when driving. Based on the oscillation frequency difference ⁇ f ′, it is possible to detect the presence or absence of a change from the inspection object 70 to the inspection object 71 in the vicinity of the unit cell. For example, when the difference ⁇ f ′ in the oscillation frequency is less than a predetermined threshold, it is determined that there is no change in the inspected object 71 in the vicinity of the unit cell, and when the difference ⁇ f ′ in the oscillation frequency is equal to or greater than the predetermined threshold, It is determined that the inspected object 70 has changed to the inspected object 71 in the vicinity of the unit cell.
- the inspection object 71 The changed position can be detected. Therefore, since the sensor device 100 can individually detect the presence or absence of changes to the inspected object 71 for each of the unit cells A11 to ALM, the resolution corresponding to the distribution density (arrangement density) of the unit cells A11 to ALM The distribution of changes from the inspected object 70 to the inspected object 71 can be detected.
- Embodiment 3 of the present invention will be described below with reference to FIGS. 9 and 10.
- members having the same functions as those described in the embodiment are given the same reference numerals, and descriptions thereof are omitted.
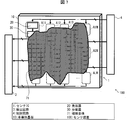
- FIG. 7 is a diagram showing a fourth state in which the device under test 72 is attached to the surface of the sensor IC 1 of the sensor device 100 shown in FIG.
- the state of water related to the object to be inspected 70 changes with the passage of time or the like (for example, increase or decrease in bulk water due to a change in the hydration state, and inclusion of the object 70 to be inspected). Evaporation of water to be used).
- the inspected object 70 is changed to the inspected object 72.
- the inspected object 72 has a portion 73, a portion 74, and a portion 75 whose physical properties are locally changed.
- the local change in the physical property of the inspection object 72 is, for example, a change in a chemical reaction of components included in the inspection object 72, a temperature change of the inspection object 72, a distance from the surface of the semiconductor substrate 10, or the like.
- the detection circuit 3 is driven by the control circuit 4 in the state (fourth state) in which the inspection object 72 is attached to the surface of the sensor IC 1 as shown in FIG.
- the frequency of the signal output from the unit cell is measured, and the oscillation frequency of the oscillator 20 is calculated.
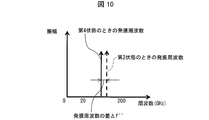
- FIG. 10 is a diagram showing the oscillation frequency of the oscillator 20 in the fourth state with respect to the second state in the sensor device 100 shown in FIG. Along with the change from the inspection object 70 to the inspection object 72, the oscillation frequency of the oscillator 20 also changes.
- the detection circuit 3 calculates a difference ⁇ f ′′ of the oscillation frequency of the oscillator 20 between the second state and the fourth state when driving. Based on the difference ⁇ f ′′ in the oscillation frequency, it is possible to detect a local change of the inspection object 72 in the vicinity of the unit cell. For example, when a plurality of threshold values are provided and the oscillation frequency difference ⁇ f ′′ is greater than or equal to the first threshold value and less than the second threshold value, the device 72 is present in the vicinity of the unit cell, but the parts 73 to 75 are present.
- the local change of the inspection object 72 is associated with the arrangement of the plurality of unit cells A11 to ALM on the semiconductor substrate 10 by associating the local change of the inspection object 72 in the vicinity of each of the unit cells A11 to ALM. Can be detected. Therefore, since the sensor device 100 can individually detect the local change of the inspected object 72 for each of the unit cells A11 to ALM, the sensor device 100 has a resolution corresponding to the distribution density (arrangement density) of the unit cells A11 to ALM. The distribution of local changes of the inspection object 72 can be detected.
- Embodiment 4 of the present invention will be described below with reference to FIG.
- members having the same functions as those described in the embodiment are given the same reference numerals, and descriptions thereof are omitted.
- FIG. 11 is a schematic diagram for explaining the control for sequentially driving the unit cells A11 to ALM included in the sensor device 100 shown in FIG.
- the control circuit 4 drives the unit cell Axy (x is an integer from 1 to L, y is an integer from 1 to M) at time T_ (x ⁇ 1) L + y, and does not drive at other times. Output a control signal. Therefore, as shown in FIG. 11, from time T_1 to time T_ML, unit cell A11, unit cell A21, unit cell A31,..., Unit cell AL1, unit cell A21, unit cell A22,.
- the drive is sequentially performed at a predetermined time width and a predetermined time interval.
- the time interval for driving the unit cells A11 to ALM is preferably 1 millisecond or more.
- the temporal change of the oscillation frequency of each oscillator 20 of the unit cells A11 to ALM can be detected by repeating the sequential driving periodically or aperiodically.
- control by the control circuit 4 is flexible so that when the sequential driving is repeated, the intensive unit cells can be repeatedly driven or the intensive unit cell driving time can be extended. Also good. As a result, for example, by intensively driving the unit cell having a large change in the oscillation frequency, the distribution of the temporal change in the oscillation frequency of the oscillator 20 of each of the unit cells A11 to ALM can be detected with higher accuracy. it can.
- the sensor device 100 can sequentially detect a temporal change and a spatial change of the oscillation frequency of each oscillator 20 from the plurality of unit cells A11 to ALM.
- the temporal change and the spatial change of the oscillation frequency of the oscillator 20 are the local change and the temporal change of the property and state of the inspection object such as the parts 73 to 75 of the inspection object 72 shown in FIG. Due to changes.
- the sensor device 100 can sequentially detect a temporal change and a spatial change of the object to be inspected so as to change the oscillation frequency of the oscillator 20.
- test objects 70 to 72 are attached to a part of the surface of the sensor IC 1 of the sensor device 100 has been described.
- a case where the entire surface of the sensor IC 2 of the sensor device is immersed in an aqueous solution (inspected objects 76 and 77) will be described.
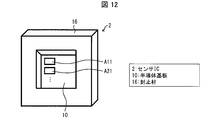
- FIG. 12 is a perspective view showing a schematic configuration of another sensor IC 2 included in the sensor device 100 shown in FIG. Moreover, it is a figure which shows the 1st state where the surface of sensor IC2 is clean.
- the sensor IC 2 is a sensor integrated circuit (Integrated Circuit).
- the sensor IC 2 includes a semiconductor substrate 10, a plurality of unit cells A11 to ALM, and further includes a sealing material 16.
- the sealing material 16 seals the bonding wire and the bonding pad so that the bonding wire and the bonding pad (not shown) are not in direct contact with the aqueous solution.
- the material and shape of the sealing material 16 are not particularly limited.
- the resonator 50 (at least one of the inductor 52 and the capacitor 54). ) Is formed on the uppermost metal layer. Further, as shown in FIG. 2B, the portion of the resonator 50 (at least one of the inductor 52 and the capacitor 54) formed in the metal layer which is the uppermost layer is covered with the protective film 15, and the aqueous solution ( There is no direct contact with the inspected objects 76 and 77).
- the control circuit 4 sequentially drives the unit cells A11 to ALM, and sets the frequency of the signal output by the driving unit cell.
- the detection circuit 3 measures. Then, the detection circuit 3 calculates the oscillation frequency of the oscillator 20 based on the frequency division ratio 1 / N of the frequency divider 30.
- FIG. 13 is a diagram showing a second state in which the surface of the sensor IC 2 shown in FIG.
- the inspection object 76 uniformly covers the surface of the semiconductor substrate 10 and is an aqueous solution.
- the control circuit 4 sequentially drives the unit cells A11 to ALM to drive the unit cells.
- the detection circuit 3 measures the frequency of the signal output from. Then, the detection circuit 3 calculates the oscillation frequency of the oscillator 20 based on the frequency division ratio 1 / N of the frequency divider 30.
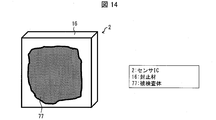
- FIG. 14 is a diagram illustrating a third state in which the surface of the sensor IC 2 illustrated in FIG.
- the inspection object 77 is an aqueous solution in which the inspection object 76 is changed.
- the change from the test object 76 to the test object 77 is, for example, a change in the properties of the aqueous solution due to a change in solute (e.g., change in concentration, vaporization, solidification, progress of chemical reaction, etc.) over time.
- the control circuit 4 sequentially drives the unit cells A11 to ALM to drive the unit cells.
- the detection circuit 3 measures the frequency of the signal output from. Then, the detection circuit 3 calculates the oscillation frequency of the oscillator 20 based on the frequency division ratio 1 / N of the frequency divider 30.
- FIG. 15 is a diagram showing the oscillation frequencies of the oscillator 20 in the first state, the second state, and the third state in the sensor IC 2 shown in FIG.
- the detection circuit 3 includes a difference ⁇ f ′′ ′′ of the oscillation frequency of the oscillator 20 between the first state and the second state, and a difference of the oscillation frequency of the oscillator 20 between the second state and the third state. ⁇ f ′ ′′ ′′ is calculated.
- the detection circuit 3 can calculate the distribution and average value of the property (physical properties) of the device under test 76 as a change in dielectric constant based on the difference ⁇ f ′ ′′ between the first state and the second state and the oscillation frequency. .
- the distribution of properties (physical properties) and the average value of the inspected object 77 can be calculated as changes in dielectric constant.
- a sensor device (sensor IC1, sensor IC2, sensor device 100) according to aspect 1 of the present invention includes a substrate (semiconductor substrate 10) and a plurality of resonators (50) disposed on the substrate, Each of the resonators changes the resonance frequency in accordance with the physical properties (properties, state, dielectric constant, etc.) of the inspected objects (70 to 72, 76, 77) in the vicinity of each of the resonators, and distributes the plurality of resonators. And a distribution of physical properties of the object to be inspected based on the resonance frequencies of the plurality of resonators, and the center of two resonators adjacent to each other among the plurality of resonators (50).
- the distance (row interval, column interval) is 300 ⁇ m or less.
- the resonator is not a narrowly-defined antenna that transmits and receives electromagnetic waves, and is not restricted by the aperture diameter depending on the wavelength, so that the area can be reduced.
- substrate can be raised by the area reduction of a resonator. Therefore, it is possible to detect the distribution of physical properties of the object to be inspected in a wide range and increase the spatial resolution. Since the spatial resolution is high in a wide range, a local change in physical properties of the object to be inspected can be detected in a wide range.
- the object to be inspected need not be labeled with magnetic particles or the like. For this reason, the measurement work can be simplified.
- the arrangement density of the resonators can be increased. For this reason, the sensor device can be miniaturized. Alternatively, the spatial resolution of the sensor device can be increased.
- a sensor device (sensor IC1, sensor IC2, sensor device 100) according to aspect 2 of the present invention is the sensor device according to aspect 1, and at least one of the plurality of resonators (50) includes an inductor ( 52) and a capacitor (54), and at least one of the inductor and the capacitor is formed in the metal layer of the substrate (10) and the substrate and the device under test (70 to 72). , 76, 77) including the layer closest to the contact position.
- the metal layer closest to the object to be inspected is sensitive to changes in the dielectric constant or permeability of the surface of the substrate, the resonance frequency is likely to change depending on the object to be inspected. For this reason, the sensitivity of the sensor device can be increased.
- the sensor device (sensor IC1, sensor IC2, sensor device 100) according to aspect 3 of the present invention is the sensor device according to aspect 1 or 2, and the resonance frequency of each of the plurality of resonators is 30 GHz or more and 200 GHz or less. It is characterized by being.
- the change in complex permittivity due to the hydration phenomenon is large. For this reason, according to the said structure, the motion of the water molecule inside a to-be-inspected object, a hydration phenomenon, etc. can be measured.
- a sensor device (sensor IC1, sensor IC2, sensor device 100) according to aspect 4 of the present invention is the sensor device according to any one of aspects 1 to 3, and at least of the plurality of resonators (50).
- the size of one resonator in plan view is a size that fits in a square having a side of 200 ⁇ m.
- the arrangement density of the resonators can be increased. For this reason, the sensor device can be miniaturized. Alternatively, the spatial resolution of the sensor device can be increased.
- a sensor device (100) according to aspect 5 of the present invention is the sensor device according to any one of aspects 1 to 4, and is provided in a one-to-one correspondence with each of the plurality of resonators (50).
- a plurality of frequency dividers (30) for dividing the resonance frequency of the corresponding resonator, and detection for estimating the resonance frequency of each of the plurality of resonators based on outputs of the plurality of frequency dividers And a circuit (3).
- the frequency band of the signal handled by the detection circuit is a frequency band lower than the resonance frequency band. Therefore, the detection circuit need not be configured to handle a high frequency band, and the detection circuit can be simplified and reduced in cost.
- a sensor device (sensor device 100) according to Aspect 6 of the present invention is the sensor device according to any one of Aspects 1 to 5, and includes a control circuit (4) for sequentially driving the plurality of resonators (50). It is further provided with the feature.
Landscapes
- Physics & Mathematics (AREA)
- Chemical & Material Sciences (AREA)
- General Physics & Mathematics (AREA)
- Health & Medical Sciences (AREA)
- Life Sciences & Earth Sciences (AREA)
- Analytical Chemistry (AREA)
- Biochemistry (AREA)
- General Health & Medical Sciences (AREA)
- Immunology (AREA)
- Pathology (AREA)
- Electrochemistry (AREA)
- Chemical Kinetics & Catalysis (AREA)
- Electromagnetism (AREA)
- Investigating Or Analyzing Materials By The Use Of Electric Means (AREA)
Abstract
The purpose of the present invention is to improve spatial resolution and detect localized variations in the physical properties of an examination subject. A sensor IC (1) comprises a semiconductor substrate (10) and a plurality of oscillators (20) having resonators, and the resonators of each of the plurality of oscillators (20) are made to vary the resonant frequency thereof according to the physical properties of the examination subject in the vicinity thereof, the distribution of the physical properties of the examination subject is detected on the basis of the resonant frequency and distribution of the resonators of the plurality of oscillators (20), and the distance between the centers of two of the plurality of resonators (20) that adjoin one another does not exceed 300μm.
Description
本発明は、センサ装置に関する。
The present invention relates to a sensor device.
各家庭や簡易診断所などで利用される診断ツールには、高速検査、低価格、小型化、および簡便性などが要求される。半導体集積回路により形成されたセンサICは、このような要求性能を満たすことができる可能性がある。
Diagnostic tools used in homes and simple diagnostic centers are required to have high-speed inspection, low price, miniaturization, and simplicity. A sensor IC formed of a semiconductor integrated circuit may be able to satisfy such required performance.
このようなセンサICに関し、特許文献1は、試料内の磁性粒子の量と動きとを検出する測定システムを開示している。
Regarding such a sensor IC, Patent Document 1 discloses a measurement system that detects the amount and movement of magnetic particles in a sample.
図16は、特許文献1に記載のセンサICを説明するための図である。図16の(a)は、特許文献1に記載のセンサICに含まれる発振器110と発振器120との概略構成を示す回路図である。図16の(b)は、特許文献1に記載のセンサICの概略構成を示す斜視図である。図16の(c)は、特許文献1に記載のセンサICへ被検査体114を付着させた状態を示す斜視図である。図16の(d)は、特許文献1に記載のセンサICへ被検査体114と基準となる被検査体124とを付着させた状態を示す斜視図である。
FIG. 16 is a diagram for explaining the sensor IC described in Patent Document 1. FIG. FIG. 16A is a circuit diagram illustrating a schematic configuration of the oscillator 110 and the oscillator 120 included in the sensor IC described in Patent Document 1. FIG. FIG. 16B is a perspective view showing a schematic configuration of the sensor IC described in Patent Document 1. FIG. FIG. 16C is a perspective view showing a state in which the device under test 114 is attached to the sensor IC described in Patent Document 1. FIG. FIG. 16D is a perspective view showing a state in which the inspection object 114 and the inspection object 124 serving as a reference are attached to the sensor IC described in Patent Document 1.
図17は、特許文献1に記載のセンサICに含まれる発振器110を説明するための図である。図17の(a)は、図16の(a)の部分図であり、図17の(b)はBB´断面図である。
FIG. 17 is a diagram for explaining the oscillator 110 included in the sensor IC described in Patent Document 1. In FIG. 17A is a partial view of FIG. 16A, and FIG. 17B is a BB ′ cross-sectional view.
図16の(a)に示すように、特許文献1に記載のセンサICは、インダクタ111を有する発振器110とインダクタ121を有する発振器120とを含む。また、制御信号(イネーブル又は非イネーブル)により、発振器110と発振器120とは選択駆動される。発振器110と発振器120とを半導体基板101に実装すると、例えば、図16の(b)のようになる。なお、簡略化のために図16の(b)においては、発振器110のインダクタ111以外の部分を、その他の回路112として示し、発振器120のインダクタ121以外の部分を、その他の回路122として示す。
16A, the sensor IC described in Patent Document 1 includes an oscillator 110 having an inductor 111 and an oscillator 120 having an inductor 121. The oscillator 110 and the oscillator 120 are selectively driven by a control signal (enable or non-enable). When the oscillator 110 and the oscillator 120 are mounted on the semiconductor substrate 101, for example, as shown in FIG. For simplification, in FIG. 16B, the part other than the inductor 111 of the oscillator 110 is shown as the other circuit 112, and the part other than the inductor 121 of the oscillator 120 is shown as the other circuit 122.
図16の(c)に示すように、発振器110に選択的に、磁性粒子113で標識された被検査体114を付着させると、磁性粒子113が有する透磁率により、発振器110が発振する発振周波数が変化する。基準となる発振器120の発振周波数と変化した発振器110の発振周波数との差から、磁性粒子113が発振器110の近傍に存在することを検出できる。そして、磁性粒子113の存在から、磁性粒子113で標識された被検査体114が発振器110の近傍に存在すると推定される。また、図16の(d)に示すように磁性粒子で標識されていない被検査体124を用いて、発振器110と発振器120との発振周波数の応答の特徴を調べることもできる。
As shown in FIG. 16C, when an object to be inspected 114 labeled with magnetic particles 113 is selectively attached to the oscillator 110, the oscillation frequency at which the oscillator 110 oscillates due to the magnetic permeability of the magnetic particles 113. Changes. From the difference between the oscillation frequency of the reference oscillator 120 and the changed oscillation frequency of the oscillator 110, it can be detected that the magnetic particles 113 are present in the vicinity of the oscillator 110. From the presence of the magnetic particles 113, it is estimated that the test object 114 labeled with the magnetic particles 113 is present in the vicinity of the oscillator 110. In addition, as shown in FIG. 16 (d), the characteristics of the oscillation frequency response of the oscillator 110 and the oscillator 120 can be examined by using a test object 124 that is not labeled with magnetic particles.
インダクタ111はメタル層(金属層)に形成される。このため、図17の(b)に示すように、半導体基板101の最上位メタル層130にインダクタ111が形成されたとしても、半導体基板101の表面とインダクタ111との間には、絶縁体等で形成された保護膜115が存在する。このため、インダクタ111に被検査体114が直接に接触することはない。同様に、インダクタ121もメタル層に形成される。このため、インダクタ121に被検査体124が直接に接触することはない。
The inductor 111 is formed in a metal layer (metal layer). Therefore, as shown in FIG. 17B, even if the inductor 111 is formed on the uppermost metal layer 130 of the semiconductor substrate 101, an insulator or the like is provided between the surface of the semiconductor substrate 101 and the inductor 111. There is a protective film 115 formed in (1). For this reason, the device under test 114 does not directly contact the inductor 111. Similarly, the inductor 121 is also formed in the metal layer. For this reason, the device under test 124 does not directly contact the inductor 121.
しかしながら、特許文献1に記載のセンサICにおいては、被検査体140の物性(誘電率、透磁率)が広い範囲で局所的に変化した場合において、被検査体140の物性の分布を測定することが難しいという問題が発生する。
However, in the sensor IC described in Patent Document 1, when the physical properties (dielectric constant and magnetic permeability) of the object to be inspected 140 are locally changed in a wide range, the physical property distribution of the object to be inspected 140 is measured. The problem that is difficult occurs.
例えば、図18は、発振器110および発振器120より広い範囲に、被検査体140が付着する場合、かつ、被検査体140の内部に物性の互いに異なる部位141および部位142が存在する場合、を示す。図18に示された場合、発振器110および発振器120は、部位141における物性とおよび部位142における物性とを個別に測定することができない。
For example, FIG. 18 shows a case where the device under test 140 adheres to a wider area than the oscillator 110 and the oscillator 120, and a case where a portion 141 and a portion 142 having different physical properties exist inside the device under test 140. . In the case illustrated in FIG. 18, the oscillator 110 and the oscillator 120 cannot individually measure the physical property at the portion 141 and the physical property at the portion 142.
本発明は、上記の課題を鑑みてなされた発明であり、その目的は、被検査体の物性の分布を広い範囲で検出する空間的分解能を高めることである。そして、空間的分解能高くすることにより、被検査体の物性の局所的な変化を検出することも、本発明の目的である。
The present invention has been made in view of the above problems, and its purpose is to increase the spatial resolution for detecting the distribution of physical properties of the object to be inspected over a wide range. It is also an object of the present invention to detect local changes in physical properties of the object to be inspected by increasing the spatial resolution.
上記の課題を解決するために、本発明の一態様に係るセンサ装置は、基板と、前記基板に配置された複数の共振器と、を備え、前記複数の共振器は、それぞれ、自身の近傍にある被検査体の物性に応じて共振周波数を変化させ、前記複数の共振器の分布と、前記複数の共振器のそれぞれの前記共振周波数とに基づき、前記被検査体の物性の分布を検出し、前記複数の共振器のうち、互いに隣り合う2つの共振器の中心間距離が300μm以下であることを特徴とする。
In order to solve the above-described problem, a sensor device according to one embodiment of the present invention includes a substrate and a plurality of resonators disposed on the substrate, and each of the plurality of resonators is in the vicinity of itself. The resonance frequency is changed according to the physical property of the object to be inspected, and the distribution of the physical property of the object to be inspected is detected based on the distribution of the plurality of resonators and the resonance frequency of each of the plurality of resonators. The center distance between two resonators adjacent to each other among the plurality of resonators is 300 μm or less.
本発明の一態様によれば、共振器は、電磁波の送受信をするような狭義のアンテナではなく、波長による開口径の制約を受けないため、小面積化が可能である。そして、共振器の小面積化により、基板上の共振器の配置密度を高めることができる。したがって、被検査体の物性の分布を広い範囲で検出することと、空間的分解能を高めることとができる。そして、波長による制約を受けないために、狭義のアンテナをアレイ状に並べた場合に実現できない高い空間的分解能で、被検査体の物性の局所的な変化を検出することができる。
According to one embodiment of the present invention, the resonator is not a narrowly-defined antenna that transmits and receives electromagnetic waves, and is not restricted by the aperture diameter depending on the wavelength, so that the area can be reduced. And the arrangement density of the resonator on a board | substrate can be raised by the area reduction of a resonator. Therefore, it is possible to detect the distribution of physical properties of the object to be inspected in a wide range and increase the spatial resolution. And since it is not restricted by the wavelength, it is possible to detect local changes in the physical properties of the object to be inspected with a high spatial resolution that cannot be realized when narrowly defined antennas are arranged in an array.
また、上記態様によれば、被検査体を磁性粒子等で標識しなくてもよい。このため、測定作業を簡易にすることができる。
In addition, according to the above aspect, the object to be inspected need not be labeled with magnetic particles or the like. For this reason, the measurement work can be simplified.
また、上記態様によれば、共振器の配置密度を増やすことができる。このため、センサ装置の小型化が可能になる。またはセンサ装置の空間的分解能を高めることができる。
Further, according to the above aspect, the arrangement density of the resonators can be increased. For this reason, the sensor device can be miniaturized. Alternatively, the spatial resolution of the sensor device can be increased.
以下、本発明の実施の形態について、詳細に説明する。
Hereinafter, embodiments of the present invention will be described in detail.
〔実施形態1〕
本発明の実施形態1について、図1~図6に基づいて説明すれば、以下のとおりである。Embodiment 1
Embodiment 1 of the present invention will be described below with reference to FIGS.
本発明の実施形態1について、図1~図6に基づいて説明すれば、以下のとおりである。
(センサ装置の構成)
図1は、本発明に係るセンサ装置100の概略構成を示す斜視図であり、センサ装置100のセンサIC1の表面が清浄である第1状態を示す図である。 (Configuration of sensor device)
FIG. 1 is a perspective view showing a schematic configuration of asensor device 100 according to the present invention, and shows a first state in which the surface of a sensor IC 1 of the sensor device 100 is clean.
図1は、本発明に係るセンサ装置100の概略構成を示す斜視図であり、センサ装置100のセンサIC1の表面が清浄である第1状態を示す図である。 (Configuration of sensor device)
FIG. 1 is a perspective view showing a schematic configuration of a
センサ装置100は、センサIC1と検出回路3と制御回路4とを含む。
The sensor device 100 includes a sensor IC 1, a detection circuit 3, and a control circuit 4.
センサIC1は、センサ用の集積回路(Integrated Circuit)である。センサIC1は、半導体基板10と複数のユニットセルA11~ALMとを含む。
The sensor IC 1 is an integrated circuit for sensors (IntegratedirCircuit). The sensor IC1 includes a semiconductor substrate 10 and a plurality of unit cells A11 to ALM.
ユニットセルA11~ALMのそれぞれは、半導体基板10に形成された回路である。また、複数のユニットセルA11~ALMの配置は、L行M列で行間隔も列間隔も300μm以下の行列状である。また、ユニットセルA11~ALMのそれぞれは、互いに同一構成であり、それぞれ発振器20と分周器30とを含む。
Each of the unit cells A11 to ALM is a circuit formed on the semiconductor substrate 10. The plurality of unit cells A11 to ALM are arranged in a matrix form having L rows and M columns and having a row interval and a column interval of 300 μm or less. Each of unit cells A11 to ALM has the same configuration and includes an oscillator 20 and a frequency divider 30, respectively.
分周器30は、発振器20が発振する発振周波数を分周する周波数分周器であり、発振器20に対して1対1対応に設けられている。分周器30の分周比は1/N(Nは1以上の有理数)である。分周器30は、検出回路3へ入力される信号を検出回路3が扱いやすいように、検出回路3へ入力される信号の周波数を、発振器20の発振周波数の1/N倍にする。これにより、検出回路3へ入力される信号の周波数が、検出回路3が動作する周波数帯に収まる。
The frequency divider 30 is a frequency divider that divides the oscillation frequency oscillated by the oscillator 20, and is provided in a one-to-one correspondence with the oscillator 20. The frequency dividing ratio of the frequency divider 30 is 1 / N (N is a rational number of 1 or more). The frequency divider 30 sets the frequency of the signal input to the detection circuit 3 to 1 / N times the oscillation frequency of the oscillator 20 so that the detection circuit 3 can easily handle the signal input to the detection circuit 3. As a result, the frequency of the signal input to the detection circuit 3 falls within the frequency band in which the detection circuit 3 operates.
制御回路4は、複数のユニットセルA11~ALMを選択的に駆動するための制御信号(イネーブル、または非イネーブル)を出力する回路であり、駆動しているユニットセルが複数のユニットセルA11~ALMの何れであるかを把握している。検出回路3は、駆動しているユニットセルが出力する信号の周波数に、分周器30の分周比の逆数Nを積算し、発振器20の発振周波数を算出する。なお、制御回路4と検出回路3とは、半導体基板10に形成されてもよく、半導体基板10とは別の部材に形成されてもよい。
The control circuit 4 is a circuit that outputs a control signal (enable or non-enable) for selectively driving the plurality of unit cells A11 to ALM, and the driving unit cell is a plurality of unit cells A11 to ALM. It is grasped which is. The detection circuit 3 calculates the oscillation frequency of the oscillator 20 by adding the reciprocal number N of the frequency division ratio of the frequency divider 30 to the frequency of the signal output from the unit cell being driven. The control circuit 4 and the detection circuit 3 may be formed on the semiconductor substrate 10 or may be formed on a member different from the semiconductor substrate 10.
(発振器の構成)
図2は、図1に示したセンサ装置100に含まれる発振器20の概略構成を説明するための図である。図2の(a)は、発振器20の概略構成を示す回路図である。図2の(b)は発振器20の概略構成を示すAA´断面図である。 (Configuration of oscillator)
FIG. 2 is a diagram for explaining a schematic configuration of theoscillator 20 included in the sensor device 100 shown in FIG. FIG. 2A is a circuit diagram showing a schematic configuration of the oscillator 20. FIG. 2B is an AA ′ cross-sectional view showing a schematic configuration of the oscillator 20.
図2は、図1に示したセンサ装置100に含まれる発振器20の概略構成を説明するための図である。図2の(a)は、発振器20の概略構成を示す回路図である。図2の(b)は発振器20の概略構成を示すAA´断面図である。 (Configuration of oscillator)
FIG. 2 is a diagram for explaining a schematic configuration of the
発振器20は、差動回路40と、差動回路40の差動間に形成されている共振器50と、発振器20の駆動を制御信号に従って制御する電流源60とを含む。発振器20が発振する発振周波数は30GHz以上200GHz以下である。
The oscillator 20 includes a differential circuit 40, a resonator 50 formed between the differential circuits 40, and a current source 60 that controls driving of the oscillator 20 according to a control signal. The oscillation frequency that the oscillator 20 oscillates is 30 GHz or more and 200 GHz or less.
差動回路40は、互いにクロスカップルされたNMOSトランジスタM1およびNMOSトランジスタM2を含む。なお、適宜別の差動回路を用いてよい。例えば、バイポーラトランジスタを用いてもよい。
The differential circuit 40 includes an NMOS transistor M1 and an NMOS transistor M2 that are cross-coupled to each other. Note that another differential circuit may be used as appropriate. For example, a bipolar transistor may be used.
共振器50は、差動回路40の差動間に並列に接続されているインダクタ52とキャパシタ54とを含む。また、共振器50が共振する共振周波数が、発振器20が発振する発振周波数である。共振器50は、電磁波の送受信をするような狭義のアンテナではないため、波長による開口径の制限を受けない。このため、共振器50のサイズは、200GHzの電磁波の波長約1.5mmの四半波長より小さい200μm四方以下(一辺200μmの正方形に収まるサイズ)とすることができる。
The resonator 50 includes an inductor 52 and a capacitor 54 connected in parallel between the differentials of the differential circuit 40. The resonance frequency at which the resonator 50 resonates is the oscillation frequency at which the oscillator 20 oscillates. Since the resonator 50 is not a narrowly defined antenna that transmits and receives electromagnetic waves, the resonator 50 is not limited by the aperture diameter due to the wavelength. For this reason, the size of the resonator 50 can be set to 200 μm square or less (a size that fits in a square having a side of 200 μm), which is smaller than a quarter wavelength of a wavelength of about 1.5 mm of an electromagnetic wave of 200 GHz.
インダクタ52は、半導体基板10のメタル層のうち、最上層(基板と被検査体との接触位置に最も近い層)に形成されている。インダクタ52は、共振器50の回路サイズの大部分を占める。また、共振器50は、発振器20の回路サイズの大部分を占める。本実施形態において、共振器50の平面視におけるサイズが、一辺200μmの正方形に収まるサイズとなるように、インダクタ52の面積が定められている。なお、キャパシタ54は、トランジスタM1、M2のゲート容量や、図示しない配線の寄生容量などにより形成されてもよい。
The inductor 52 is formed in the uppermost layer (the layer closest to the contact position between the substrate and the object to be inspected) among the metal layers of the semiconductor substrate 10. The inductor 52 occupies most of the circuit size of the resonator 50. The resonator 50 occupies most of the circuit size of the oscillator 20. In the present embodiment, the area of the inductor 52 is determined so that the size of the resonator 50 in a plan view is a size that fits in a square having a side of 200 μm. The capacitor 54 may be formed by gate capacitances of the transistors M1 and M2, parasitic capacitances of wirings not shown, and the like.
図2の(b)に示すように、インダクタ52は絶縁体などで形成された保護膜15により覆われている。このため、インダクタ52に水分および被検査体等が直接に接触することはない。インダクタ52は、最上層であるメタル層に形成されているため、半導体基板10の表面に付着した近傍の水分子および被検査体に関わる水の状態変化等により、共振器20の共振周波数が変化する。より詳細に述べると、水分子および被検査体に関わる水の状態変化等により、最上層であるメタル層の周囲の誘電率が変化する。これにより、共振器20に影響する寄生容量値が変化する。なお、共振器50の共振周波数が水分および被検査体等により変化するためには、インダクタ52とキャパシタ54との少なくとも一方の形成箇所が最上層であるメタル層を含み、当該一方に影響する容量値が変化すればよい。
As shown in FIG. 2B, the inductor 52 is covered with a protective film 15 formed of an insulator or the like. For this reason, moisture, an object to be inspected, and the like do not directly contact the inductor 52. Since the inductor 52 is formed in the metal layer that is the uppermost layer, the resonance frequency of the resonator 20 changes due to the water molecules near the surface of the semiconductor substrate 10 and the water state related to the object to be inspected. To do. More specifically, the dielectric constant around the metal layer, which is the uppermost layer, changes due to changes in the state of water associated with water molecules and the object to be inspected. As a result, the parasitic capacitance value that affects the resonator 20 changes. In order for the resonance frequency of the resonator 50 to change due to moisture, the object to be inspected, and the like, at least one of the inductor 52 and the capacitor 54 includes a metal layer that is the uppermost layer, and a capacitance that affects the one. It only has to change the value.
インダクタ52とキャパシタ54はLC回路を形成しており、インダクタ52のインダクタンスとキャパシタ54のキャパシタンスとにより、共振器50の共振周波数および発振器20の発振周波数が決まる。例えば、インダクタ52のインダクタンスが1nH付近であり、キャパシタ54のキャパシタンスが27fF付近である場合、共振器50の共振周波数および発振器20の発振周波数は約30GHz付近である。
The inductor 52 and the capacitor 54 form an LC circuit, and the resonance frequency of the resonator 50 and the oscillation frequency of the oscillator 20 are determined by the inductance of the inductor 52 and the capacitance of the capacitor 54. For example, when the inductance of the inductor 52 is around 1 nH and the capacitance of the capacitor 54 is around 27 fF, the resonance frequency of the resonator 50 and the oscillation frequency of the oscillator 20 are around 30 GHz.
(測定)
以下に、図1に示したセンサ装置100による測定について説明する。 (Measurement)
Below, the measurement by thesensor apparatus 100 shown in FIG. 1 is demonstrated.
以下に、図1に示したセンサ装置100による測定について説明する。 (Measurement)
Below, the measurement by the
図3は、図1に示したセンサ装置100に含まれるセンサIC1の表面に被検査体70が付着している第2状態を示す図である。被検査体70は、水分を含有する試料であり、一例として、様々な種類の細胞、タンパク質、無機水溶液、および有機水溶液等が挙げられる。
FIG. 3 is a diagram showing a second state in which the device under test 70 is attached to the surface of the sensor IC 1 included in the sensor device 100 shown in FIG. The test object 70 is a sample containing moisture, and examples thereof include various types of cells, proteins, inorganic aqueous solutions, and organic aqueous solutions.
被検査体70を付着させる前に、図1のような、センサIC1の表面が清浄な状態(第1状態)で、制御回路4が複数のユニットセルA11~ALMを選択的に駆動し、駆動しているユニットセルが出力する信号の周波数を検出回路3が測定する。そして、測定した信号の周波数に分周器30の分周比の逆数Nを積算することにより、検出回路3が発振器20の発振周波数を算出する。
Before the test object 70 is attached, the control circuit 4 selectively drives and drives the plurality of unit cells A11 to ALM with the surface of the sensor IC 1 clean (first state) as shown in FIG. The detection circuit 3 measures the frequency of the signal output from the unit cell. Then, the detection circuit 3 calculates the oscillation frequency of the oscillator 20 by accumulating the reciprocal number N of the frequency division ratio of the frequency divider 30 to the frequency of the measured signal.
そして、図3のように、センサIC1の表面に被検査体70を付着させる。すると、被検査体70の含有する水分により、半導体基板10の表面の誘電率が変化し、発振器20の発振周波数が変化する。
Then, as shown in FIG. 3, the object 70 is adhered to the surface of the sensor IC1. Then, the dielectric constant of the surface of the semiconductor substrate 10 changes due to moisture contained in the device under test 70, and the oscillation frequency of the oscillator 20 changes.
図3のような、センサIC1の表面に被検査体70が付着した状態(第2状態)で、同様に、検出回路3が、制御回路4の駆動しているユニットセルが出力する信号の周波数を測定し、発振器20の発振周波数を算出する。
Similarly, the frequency of the signal output from the unit cell driven by the control circuit 4 when the detection circuit 70 is attached to the surface of the sensor IC 1 (second state) as shown in FIG. And the oscillation frequency of the oscillator 20 is calculated.
図4は、図1に示したセンサ装置100における、発振器20の発振周波数を説明するための図である。図4の(a)は、第1状態の発振器20の発振周波数を示す図であり、図4の(b)は、第1状態に対する第2状態の発振器20の発振周波数を示す図である。
FIG. 4 is a diagram for explaining the oscillation frequency of the oscillator 20 in the sensor device 100 shown in FIG. 4A is a diagram showing the oscillation frequency of the oscillator 20 in the first state, and FIG. 4B is a diagram showing the oscillation frequency of the oscillator 20 in the second state with respect to the first state.
ユニットセルA11~ALMのそれぞれについて、制御回路4が駆動しているときの第1状態と第2状態との発振器20の発振周波数の差Δfを、検出回路3は算出する。発振周波数の差Δfに基づき、当該ユニットセルの近傍における被検査体70の含有する水分の有無を検出することにより、当該ユニットセル近傍における被検査体70の有無を検出することができる。例えば、発振周波数の差Δfが所定の閾値未満の場合、当該ユニットセルの近傍に被検査体70が存在しないと判定し、発振周波数の差Δfが所定の閾値以上の場合、当該ユニットセルの近傍に被検査体70が存在すると判定する。
For each of the unit cells A11 to ALM, the detection circuit 3 calculates a difference Δf of the oscillation frequency of the oscillator 20 between the first state and the second state when the control circuit 4 is driven. By detecting the presence / absence of moisture contained in the test object 70 in the vicinity of the unit cell based on the oscillation frequency difference Δf, the presence / absence of the test object 70 in the vicinity of the unit cell can be detected. For example, when the oscillation frequency difference Δf is less than a predetermined threshold, it is determined that the device under test 70 does not exist in the vicinity of the unit cell, and when the oscillation frequency difference Δf is equal to or greater than the predetermined threshold, the vicinity of the unit cell. It is determined that the inspected object 70 exists.
そして、半導体基板10における複数のユニットセルA11~ALMの配置(位置情報)に、ユニットセルA11~ALMのそれぞれの近傍における被検査体70の有無を対応付けることにより、被検査体70が付着している位置が検出できる。したがって、センサ装置100は、ユニットセルA11~ALMのそれぞれについて個別に、被検査体70の有無を検出できるため、ユニットセルA11~ALMの分布密度(配置密度)に対応する分解能により、被検査体70の分布を検出できる。
Then, by associating the arrangement (position information) of the plurality of unit cells A11 to ALM on the semiconductor substrate 10 with the presence or absence of the object 70 in the vicinity of each of the unit cells A11 to ALM, the object 70 is attached. Can be detected. Therefore, since the sensor device 100 can individually detect the presence / absence of the inspected object 70 for each of the unit cells A11 to ALM, the inspected object can be detected with a resolution corresponding to the distribution density (arrangement density) of the unit cells A11 to ALM. 70 distributions can be detected.
(効果)
共振器50は、電磁波の送受信をするような狭義のアンテナではないため、波長による開口径の制約を受けずに小面積化されることができる。また、センサIC1は、共振器50を用いてため、小面積化されることができる。具体的には、共振器50のサイズを200μm四方以下(一辺200μmの正方形に収まるサイズ)にできる。なお、200μm四方(一辺200μmの正方形)の最大径(対角線の長さ、約283μm)は、200GHzの電磁波の波長約1.5mmの四半波長(約375μm)より小さい。 (effect)
Since theresonator 50 is not a narrowly-defined antenna that transmits and receives electromagnetic waves, the resonator 50 can be reduced in size without being restricted by the aperture diameter depending on the wavelength. Further, since the sensor IC1 uses the resonator 50, the area can be reduced. Specifically, the size of the resonator 50 can be reduced to 200 μm square or less (a size that fits in a square having a side of 200 μm). Note that the maximum diameter (diagonal length, approximately 283 μm) of a 200 μm square (a square having a side of 200 μm) is smaller than a quarter wavelength (approximately 375 μm) of a wavelength of 200 GHz electromagnetic wave of approximately 1.5 mm.
共振器50は、電磁波の送受信をするような狭義のアンテナではないため、波長による開口径の制約を受けずに小面積化されることができる。また、センサIC1は、共振器50を用いてため、小面積化されることができる。具体的には、共振器50のサイズを200μm四方以下(一辺200μmの正方形に収まるサイズ)にできる。なお、200μm四方(一辺200μmの正方形)の最大径(対角線の長さ、約283μm)は、200GHzの電磁波の波長約1.5mmの四半波長(約375μm)より小さい。 (effect)
Since the
共振器50は、平面視において発振器20の大部分を占め、ユニットセルA11~ALMのそれぞれの大部分を占める。このため、共振器50の小面積化により、発振器20が小面積化され、ユニットセルA11~ALMのそれぞれが小面積化される。これにより、半導体基板10の面積当たりに配置できるユニットセルの数が増える。さらに、ユニットセルA11~ALMの配置の密度が高いことにより、より精密な被検査体70の分布を検出できる。具体的には、共振器50を200μm四方以下にできるため、共振器50の配列の間隔(行列状に配置した場合の行間隔および列間隔)を300μm以下にすることができる。言い換えると、互いに隣り合う2つの共振器(50)の中心間距離を300μm以下にすることができる。
The resonator 50 occupies most of the oscillator 20 in a plan view and occupies most of each of the unit cells A11 to ALM. For this reason, by reducing the area of the resonator 50, the oscillator 20 is reduced in area, and each of the unit cells A11 to ALM is reduced in area. This increases the number of unit cells that can be arranged per area of the semiconductor substrate 10. Furthermore, since the arrangement density of the unit cells A11 to ALM is high, a more precise distribution of the inspected object 70 can be detected. Specifically, since the resonator 50 can be 200 μm square or less, the arrangement interval of the resonators 50 (the row interval and the column interval when arranged in a matrix) can be 300 μm or less. In other words, the distance between the centers of two resonators (50) adjacent to each other can be set to 300 μm or less.
なお、本実施形態においては、共振器50の共振周波数(発振器20の発振周波数)の変化は、半導体基板10の表面の誘電率の変化に起因するが、本発明はこれに限られない。本発明に係るセンサ装置においては、共振器50の共振周波数が変化すればよく、例えば、透磁率の変化に起因して共振器50の共振周波数が変化してもよい。したがって、本発明に係るセンサ装置は、被検査体の物性(誘電率、透磁率)の分布、および物性(誘電率、透磁率)に影響するような被検査体の状態等の分布を検出できる。
In the present embodiment, the change in the resonance frequency of the resonator 50 (the oscillation frequency of the oscillator 20) is caused by the change in the dielectric constant of the surface of the semiconductor substrate 10, but the present invention is not limited to this. In the sensor device according to the present invention, the resonance frequency of the resonator 50 may be changed. For example, the resonance frequency of the resonator 50 may be changed due to a change in magnetic permeability. Therefore, the sensor device according to the present invention can detect the distribution of physical properties (dielectric constant, magnetic permeability) of the object to be inspected and the distribution of the state of the object to be inspected that affects the physical properties (dielectric constant, magnetic permeability). .
本実施形態においては、被検査体70を磁性粒子で標識する必要がない。このため、測定作業を簡易にすることができる。
In this embodiment, it is not necessary to label the test object 70 with magnetic particles. For this reason, the measurement work can be simplified.
特許文献1に記載のセンサICにおいては、非特許文献のFigure16.8.1に基づき、動作周波数は1.1GHzから3.3GHzである。また、10GHzを超える高周波数帯域に、特許文献1に記載のセンサICは感度を有さないと推定される。そして、水分子の運動を検出するためには、数10GHz以上に感度を有する必要がある。このため、特許文献1に記載のセンサICは、水分子の運動等を検出することができないと推定される。
In the sensor IC described in Patent Document 1, the operating frequency is 1.1 GHz to 3.3 GHz based on FIG. 16.8.1 of the non-patent document. Moreover, it is estimated that the sensor IC described in Patent Document 1 has no sensitivity in a high frequency band exceeding 10 GHz. And in order to detect the motion of a water molecule, it is necessary to have sensitivity to several tens GHz or more. For this reason, it is presumed that the sensor IC described in Patent Document 1 cannot detect the movement of water molecules.
水溶液中では、NaClのような電解質の溶質の場合には溶質のイオンへの電離により、糖の様な非電解質の溶質の場合には溶質分子中の極性の偏りにより生じる、静電気力や水素結合を介して、水分子が溶質に束縛される水和現象が起こることが知られている。タンパク質などの巨大分子の活性には水和現象が大きくかかわる。水溶液中では、水分子がタンパク質に置き換わることにより、バルク水(溶質から十分離れて束縛されない状態の水)が減少する。このため、バルク水の誘電率がタンパク質の誘電率に変化する。非特許文献2のFig.2に、バルク水の複素誘電率を示したグラフが示されている。バルク水の緩和現象により、特に30GHz~200GHzの周波数領域で複素誘電率の変動が大きい。バルク水の量が変動すると、上記した周波数領域では複素誘電率も変動することが示唆される。
In aqueous solutions, electrolyte forces such as NaCl cause ionization of solute ions, and in the case of non-electrolyte solutes such as sugars, electrostatic forces and hydrogen bonds are caused by the polarization of solute molecules. It is known that a hydration phenomenon occurs in which water molecules are bound to solutes through the nuclei. Hydration is a major factor in the activity of macromolecules such as proteins. In an aqueous solution, water molecules are replaced with proteins, thereby reducing the bulk water (water that is not sufficiently bound away from the solute). For this reason, the dielectric constant of bulk water changes to the dielectric constant of protein. FIG. 2 is a graph showing the complex dielectric constant of bulk water. Due to the relaxation phenomenon of bulk water, the fluctuation of the complex dielectric constant is particularly large in the frequency range of 30 GHz to 200 GHz. It is suggested that when the amount of bulk water varies, the complex dielectric constant also varies in the above-described frequency region.
特許文献1および非特許文献1に開示されたセンサICは、評価周波数が1.1GHzから3.3GHzであるため、バルク水の水分子の運動を評価出来ず、水和状態を表すことは出来ない。これは水分子の運動は約10GHz以上と大きいためである。そのため、磁性粒子により被検査体を標識し、磁性粒子の周波数変動に適切な1.1GHzから3.3GHzで評価することにより被検査体の動作を確認する。このため、磁性粒子による標識(磁性粒子の付加)が必要になる。
The sensor ICs disclosed in Patent Document 1 and Non-Patent Document 1 have an evaluation frequency of 1.1 GHz to 3.3 GHz, and therefore cannot evaluate the movement of water molecules in bulk water and cannot represent a hydration state. Absent. This is because the movement of water molecules is as large as about 10 GHz or more. Therefore, the operation of the object to be inspected is confirmed by labeling the object to be inspected with magnetic particles and evaluating at 1.1 GHz to 3.3 GHz suitable for the frequency fluctuation of the magnetic particles. For this reason, labeling with magnetic particles (addition of magnetic particles) is required.
したがって、共振器50の共振周波数が30GHz以上200GHz以下の周波数帯域にすることにより、本実施形態のセンサ装置100は、水溶液および水分を含有する試料等である被検査体70内部における変化を測定することができる。
Therefore, by setting the resonance frequency of the resonator 50 to a frequency band of 30 GHz or more and 200 GHz or less, the sensor device 100 of this embodiment measures a change in the inspected object 70 such as a sample containing an aqueous solution and moisture. be able to.
(変形例1)
本発明の実施形態1の変形例1について、図5に基づいて説明すれば、以下のとおりである。 (Modification 1)
Modification 1 of Embodiment 1 of the present invention will be described below with reference to FIG.
本発明の実施形態1の変形例1について、図5に基づいて説明すれば、以下のとおりである。 (Modification 1)
図5は、図1に示したセンサ装置100に含まれる発振器20の別の概略構成を示す回路図である。
FIG. 5 is a circuit diagram showing another schematic configuration of the oscillator 20 included in the sensor device 100 shown in FIG.
発振器20は、差動回路40と、差動回路40の差動間に形成されている共振器50と、発振器20の駆動を制御信号に従って制御する電流源60とを含む。
The oscillator 20 includes a differential circuit 40, a resonator 50 formed between the differential circuits 40, and a current source 60 that controls driving of the oscillator 20 according to a control signal.
図5に示す構成においては、キャパシタ54が、半導体基板10のメタル層のうち、最上層であるメタル層に形成されている(図2の(b)のインダクタ52と同様)。また、平面視において、キャパシタ54は、発振器20が半導体基板10で占める面積の大部分であり、櫛形に形成されている。
In the configuration shown in FIG. 5, the capacitor 54 is formed in the uppermost metal layer among the metal layers of the semiconductor substrate 10 (similar to the inductor 52 in FIG. 2B). In plan view, the capacitor 54 is a large part of the area occupied by the oscillator 20 on the semiconductor substrate 10 and is formed in a comb shape.
また、インダクタ52は、最上層でないメタル層に形成されてもよく、トランジスタで構成されるアクティブインダクタ等であってもよい。
Further, the inductor 52 may be formed in a metal layer that is not the uppermost layer, and may be an active inductor or the like constituted by a transistor.
キャパシタ54は、最上層であるメタル層に形成されているため、半導体基板10の表面に付着した水分および被検査体などにより、キャパシタ54のキャパシタンスが変化する。そして、発振器20が発振する発振周波数が変化する。
Since the capacitor 54 is formed in the metal layer that is the uppermost layer, the capacitance of the capacitor 54 changes due to moisture adhering to the surface of the semiconductor substrate 10 and the object to be inspected. And the oscillation frequency which the oscillator 20 oscillates changes.
(変形例2)
本発明の実施形態1の変形例2について、図6に基づいて説明すれば、以下のとおりである。 (Modification 2)
Modification 2 of Embodiment 1 of the present invention will be described below with reference to FIG.
本発明の実施形態1の変形例2について、図6に基づいて説明すれば、以下のとおりである。 (Modification 2)
図6は、図1に示したセンサ装置100に含まれる発振器20の別の概略構成を示す回路図である。
FIG. 6 is a circuit diagram showing another schematic configuration of the oscillator 20 included in the sensor device 100 shown in FIG.
発振器20は、差動回路40と、差動回路40の差動間に形成されている共振器50と、発振器20の駆動を制御信号に従って制御する電流源60とを含み、さらに共振器50と電流源60との間に接続された差動回路42を含む。
The oscillator 20 includes a differential circuit 40, a resonator 50 formed between the differential circuits 40, and a current source 60 that controls driving of the oscillator 20 according to a control signal. A differential circuit 42 connected between the current source 60 is included.
差動回路42は、互いにクロスカップルされたPMOSトランジスタM3およびPMOSトランジスタM4を含む。なお、適宜別の差動回路を用いてよい。例えば、バイポーラトランジスタを用いてもよい。
The differential circuit 42 includes a PMOS transistor M3 and a PMOS transistor M4 that are cross-coupled to each other. Note that another differential circuit may be used as appropriate. For example, a bipolar transistor may be used.
共振器50が差動回路40と差動回路42との間に挟まれている。このため、共振器50で共振する電流の電圧が、電源電圧VDDを超えない。
The resonator 50 is sandwiched between the differential circuit 40 and the differential circuit 42. For this reason, the voltage of the current that resonates in the resonator 50 does not exceed the power supply voltage VDD.
〔実施形態2〕
本発明の実施形態2について、図7と図8に基づいて説明すれば、以下のとおりである。なお、説明の便宜上、前記実施形態にて説明した部材と同じ機能を有する部材については、同じ符号を付記し、その説明を省略する。 [Embodiment 2]
Embodiment 2 of the present invention will be described below with reference to FIGS. For convenience of explanation, members having the same functions as those described in the embodiment are given the same reference numerals, and descriptions thereof are omitted.
本発明の実施形態2について、図7と図8に基づいて説明すれば、以下のとおりである。なお、説明の便宜上、前記実施形態にて説明した部材と同じ機能を有する部材については、同じ符号を付記し、その説明を省略する。 [Embodiment 2]
図7は、図1に示したセンサ装置100のセンサIC1の表面に被検査体71が付着している第3状態を示す図である。
FIG. 7 is a diagram showing a third state in which the device under test 71 is attached to the surface of the sensor IC 1 of the sensor device 100 shown in FIG.
実施形態1で示したように、時間の経過により、被検査体70に関わる水の状態が変化すると仮定する(例えば、水和状態の変化によるバルク水の増減、及び被検査体70の含有する水分の蒸発等)。それにより、被検査体70の物性(誘電率等)及び形状が変化し、物性又は形状等が異なる被検査体71へ被検査体70は変化する。
As shown in the first embodiment, it is assumed that the state of water related to the object to be inspected 70 changes with the passage of time (for example, increase / decrease in bulk water due to a change in the hydration state and the content of the object 70 to be inspected). Evaporating water). Thereby, the physical properties (dielectric constant, etc.) and shape of the inspected object 70 change, and the inspected object 70 changes to the inspected object 71 having different physical properties or shapes.
図7のような、センサIC1の表面に被検査体71が付着した状態(第3状態)で、第1状態および第2状態と同様に、検出回路3が、制御回路4の駆動しているユニットセルの出力する信号の周波数を測定し、発振器20の発振周波数を算出する。
As shown in FIG. 7, the detection circuit 3 is driven by the control circuit 4 in the state (third state) in which the test object 71 is attached to the surface of the sensor IC 1 as in the first state and the second state. The frequency of the signal output from the unit cell is measured, and the oscillation frequency of the oscillator 20 is calculated.
図8は、図1に示したセンサ装置100における、第2状態に対する第3状態の発振器20の発振周波数を示す図である。被検査体70から被検査体71への変化に伴い、発振器20の発振周波数も変化する。
FIG. 8 is a diagram showing the oscillation frequency of the oscillator 20 in the third state with respect to the second state in the sensor device 100 shown in FIG. Along with the change from the inspection object 70 to the inspection object 71, the oscillation frequency of the oscillator 20 also changes.
ユニットセルA11~ALMのそれぞれについて、駆動しているときの第2状態と第3状態との発振器20の発振周波数の差Δf´を、検出回路3は算出する。発振周波数の差Δf´に基づき、当該ユニットセルの近傍における被検査体70から被検査体71への変化の有無を検出することができる。例えば、発振周波数の差Δf´が所定の閾値未満の場合、当該ユニットセルの近傍において被検査体71への変化がないと判定し、発振周波数の差Δf´が所定の閾値以上の場合、当該ユニットセルの近傍において被検査体70が被検査体71へ変化したと判定する。
For each of the unit cells A11 to ALM, the detection circuit 3 calculates a difference Δf ′ of the oscillation frequency of the oscillator 20 between the second state and the third state when driving. Based on the oscillation frequency difference Δf ′, it is possible to detect the presence or absence of a change from the inspection object 70 to the inspection object 71 in the vicinity of the unit cell. For example, when the difference Δf ′ in the oscillation frequency is less than a predetermined threshold, it is determined that there is no change in the inspected object 71 in the vicinity of the unit cell, and when the difference Δf ′ in the oscillation frequency is equal to or greater than the predetermined threshold, It is determined that the inspected object 70 has changed to the inspected object 71 in the vicinity of the unit cell.
そして、半導体基板10における複数のユニットセルA11~ALMの配置に、ユニットセルA11~ALMのそれぞれの近傍における被検査体70から被検査体71への変化の有無を対応付けることにより、被検査体71への変化した位置が検出できる。したがって、センサ装置100は、ユニットセルA11~ALMのそれぞれについて個別に、被検査体71への変化の有無を検出できるため、ユニットセルA11~ALMの分布密度(配置密度)に対応する分解能により、被検査体70から被検査体71への変化の分布を検出できる。
Then, by associating the arrangement of the plurality of unit cells A11 to ALM on the semiconductor substrate 10 with the presence or absence of the change from the inspection object 70 to the inspection object 71 in the vicinity of each of the unit cells A11 to ALM, the inspection object 71 The changed position can be detected. Therefore, since the sensor device 100 can individually detect the presence or absence of changes to the inspected object 71 for each of the unit cells A11 to ALM, the resolution corresponding to the distribution density (arrangement density) of the unit cells A11 to ALM The distribution of changes from the inspected object 70 to the inspected object 71 can be detected.
〔実施形態3〕
本発明の実施形態3について、図9と図10に基づいて説明すれば、以下のとおりである。なお、説明の便宜上、前記実施形態にて説明した部材と同じ機能を有する部材については、同じ符号を付記し、その説明を省略する。 [Embodiment 3]
Embodiment 3 of the present invention will be described below with reference to FIGS. 9 and 10. For convenience of explanation, members having the same functions as those described in the embodiment are given the same reference numerals, and descriptions thereof are omitted.
本発明の実施形態3について、図9と図10に基づいて説明すれば、以下のとおりである。なお、説明の便宜上、前記実施形態にて説明した部材と同じ機能を有する部材については、同じ符号を付記し、その説明を省略する。 [Embodiment 3]
図7は、図1に示したセンサ装置100のセンサIC1の表面に被検査体72が付着している第4状態を示す図である。
FIG. 7 is a diagram showing a fourth state in which the device under test 72 is attached to the surface of the sensor IC 1 of the sensor device 100 shown in FIG.
実施形態1で示したように、時間の経過等により、被検査体70に関わる水の状態が変化すると仮定する(例えば、水和状態の変化によるバルク水の増減、及び被検査体70の含有する水分の蒸発等)。それにより、被検査体70は被検査体72へ変化したとする。被検査体72は、その物性が局所的に変化している部位73、部位74、および部位75を有する。被検査体72の物性の局所的な変化は、例えば、被検査体72に含まれる成分の化学反応、被検査体72の温度変化、半導体基板10の表面からの距離等の変化が、被検査体72に局所的に生じていることであり、複数のユニットセルA11~ALMのうち一部のユニットセルが出力する信号の周波数を変える。したがって、被検査体72の局所的な変化は、誘電率の局所的な変化により、ユニットセルA11~ALMに含まれる共振器50の共振周波数の局所的な変化として検出することができる。
As shown in the first embodiment, it is assumed that the state of water related to the object to be inspected 70 changes with the passage of time or the like (for example, increase or decrease in bulk water due to a change in the hydration state, and inclusion of the object 70 to be inspected). Evaporation of water to be used). As a result, the inspected object 70 is changed to the inspected object 72. The inspected object 72 has a portion 73, a portion 74, and a portion 75 whose physical properties are locally changed. The local change in the physical property of the inspection object 72 is, for example, a change in a chemical reaction of components included in the inspection object 72, a temperature change of the inspection object 72, a distance from the surface of the semiconductor substrate 10, or the like. This occurs locally in the body 72, and changes the frequency of the signal output from some of the unit cells A11 to ALM. Therefore, a local change in the device under test 72 can be detected as a local change in the resonance frequency of the resonator 50 included in the unit cells A11 to ALM due to a local change in the dielectric constant.
図9のような、センサIC1の表面に被検査体72が付着した状態(第4状態)で、第1状態~第3状態と同様に、検出回路3が、制御回路4の駆動しているユニットセルの出力する信号の周波数を測定し、発振器20の発振周波数を算出する。
The detection circuit 3 is driven by the control circuit 4 in the state (fourth state) in which the inspection object 72 is attached to the surface of the sensor IC 1 as shown in FIG. The frequency of the signal output from the unit cell is measured, and the oscillation frequency of the oscillator 20 is calculated.
図10は、図1に示したセンサ装置100における、第2状態に対する第4状態の発振器20の発振周波数を示す図である。被検査体70から被検査体72への変化に伴い、発振器20の発振周波数も変化する。
FIG. 10 is a diagram showing the oscillation frequency of the oscillator 20 in the fourth state with respect to the second state in the sensor device 100 shown in FIG. Along with the change from the inspection object 70 to the inspection object 72, the oscillation frequency of the oscillator 20 also changes.
ユニットセルA11~ALMのそれぞれについて、駆動しているときの第2状態と第4状態との発振器20の発振周波数の差Δf´´を、検出回路3は算出する。発振周波数の差Δf´´に基づき、当該ユニットセルの近傍における被検査体72の局所的な変化を検出することができる。例えば、複数の閾値を設け、発振周波数の差Δf´´が第1の閾値以上であり第2の閾値未満の場合、当該ユニットセルの近傍に被検査体72は存在するが、部位73~75のような局所的な変化は生じていないと判定する。また、発振周波数の差Δf´´が第2の閾値以上であり第3の閾値未満の場合、当該ユニットセルの近傍において被検査体72に、部位73のような局所的な変化が生じていると判定する。また、発振周波数の差Δf´´が第3の閾値以上であり第4の閾値未満の場合、当該ユニットセルの近傍において被検査体72に、部位74のような局所的な変化が生じていると判定する。また、発振周波数の差Δf´´が第4の閾値以上の場合、当該ユニットセルの近傍において被検査体72に、部位75のような局所的が変化は生じていると判定する。
For each of the unit cells A11 to ALM, the detection circuit 3 calculates a difference Δf ″ of the oscillation frequency of the oscillator 20 between the second state and the fourth state when driving. Based on the difference Δf ″ in the oscillation frequency, it is possible to detect a local change of the inspection object 72 in the vicinity of the unit cell. For example, when a plurality of threshold values are provided and the oscillation frequency difference Δf ″ is greater than or equal to the first threshold value and less than the second threshold value, the device 72 is present in the vicinity of the unit cell, but the parts 73 to 75 are present. It is determined that no local change such as When the oscillation frequency difference Δf ″ is equal to or larger than the second threshold value and smaller than the third threshold value, a local change such as the region 73 occurs in the inspected object 72 in the vicinity of the unit cell. Is determined. When the oscillation frequency difference Δf ″ is equal to or larger than the third threshold value and smaller than the fourth threshold value, a local change such as the region 74 occurs in the inspected object 72 in the vicinity of the unit cell. Is determined. Further, when the difference Δf ″ in the oscillation frequency is equal to or greater than the fourth threshold value, it is determined that a local change such as the region 75 has occurred in the inspected object 72 in the vicinity of the unit cell.
そして、半導体基板10における複数のユニットセルA11~ALMの配置に、ユニットセルA11~ALMのそれぞれの近傍における被検査体72の局所的な変化を対応付けることにより、被検査体72の局所的な変化の位置が検出できる。したがって、センサ装置100は、ユニットセルA11~ALMのそれぞれについて個別に、被検査体72の局所的な変化を検出できるため、ユニットセルA11~ALMの分布密度(配置密度)に対応する分解能により被検査体72の局所的な変化の分布を検出できる。
Then, the local change of the inspection object 72 is associated with the arrangement of the plurality of unit cells A11 to ALM on the semiconductor substrate 10 by associating the local change of the inspection object 72 in the vicinity of each of the unit cells A11 to ALM. Can be detected. Therefore, since the sensor device 100 can individually detect the local change of the inspected object 72 for each of the unit cells A11 to ALM, the sensor device 100 has a resolution corresponding to the distribution density (arrangement density) of the unit cells A11 to ALM. The distribution of local changes of the inspection object 72 can be detected.
〔実施形態4〕
本発明の実施形態4について、図11に基づいて説明すれば、以下のとおりである。なお、説明の便宜上、前記実施形態にて説明した部材と同じ機能を有する部材については、同じ符号を付記し、その説明を省略する。 [Embodiment 4]
Embodiment 4 of the present invention will be described below with reference to FIG. For convenience of explanation, members having the same functions as those described in the embodiment are given the same reference numerals, and descriptions thereof are omitted.
本発明の実施形態4について、図11に基づいて説明すれば、以下のとおりである。なお、説明の便宜上、前記実施形態にて説明した部材と同じ機能を有する部材については、同じ符号を付記し、その説明を省略する。 [Embodiment 4]
図11は、図1に示したセンサ装置100に含まれるユニットセルA11~ALMを順次駆動する制御を説明する模式図である。
FIG. 11 is a schematic diagram for explaining the control for sequentially driving the unit cells A11 to ALM included in the sensor device 100 shown in FIG.
制御回路4は、ユニットセルAxy(xは1以上L以下の整数、yは1以上M以下の整数)が、時間T_(x-1)L+yに、駆動し、その他の時間には駆動しないように制御信号を出力する。そのため、図11に示すように、時間T_1から時間T_MLまでにおいて、ユニットセルA11、ユニットセルA21、ユニットセルA31、…、ユニットセルAL1、ユニットセルA21、ユニットセルA22、…、ユニットセルALMの順に、所定の時間幅かつ所定の時間間隔で、順次駆動する。
The control circuit 4 drives the unit cell Axy (x is an integer from 1 to L, y is an integer from 1 to M) at time T_ (x−1) L + y, and does not drive at other times. Output a control signal. Therefore, as shown in FIG. 11, from time T_1 to time T_ML, unit cell A11, unit cell A21, unit cell A31,..., Unit cell AL1, unit cell A21, unit cell A22,. The drive is sequentially performed at a predetermined time width and a predetermined time interval.
ユニットセルA11~ALMの出力する信号が重なり合わないために、分周器30を考慮に入れなければ、時間間隔は、33ピコ秒(30GHzの電磁波の周期)の1000倍の33ナノ秒程度でよい。一方、現実的には、分周器30により、駆動しているユニットセルが出力する信号の周波数は100MHz程度になるため、時間間隔は、10ナノ秒(100MHzの電磁波の周期)の100倍の1マイクロ秒程度が必要である。したがって、ユニットセルA11~ALMの出力する信号が重なり合わないために、ユニットセルA11~ALMが駆動する時間間隔は1ミリ秒以上が好ましい。
If the frequency divider 30 is not taken into account because the signals output from the unit cells A11 to ALM do not overlap, the time interval is about 33 nanoseconds, which is 1000 times 33 picoseconds (30 GHz electromagnetic wave period). Good. On the other hand, since the frequency of the signal output from the unit cell being driven by the frequency divider 30 is about 100 MHz, the time interval is 100 times 10 nanoseconds (cycle of electromagnetic wave of 100 MHz). About 1 microsecond is required. Accordingly, in order to prevent the signals output from the unit cells A11 to ALM from overlapping, the time interval for driving the unit cells A11 to ALM is preferably 1 millisecond or more.
順次駆動を周期的または非周期的に繰り返すことにより、ユニットセルA11~ALMのそれぞれの発振器20の発振周波数の時間的な変化を検出することができる。
The temporal change of the oscillation frequency of each oscillator 20 of the unit cells A11 to ALM can be detected by repeating the sequential driving periodically or aperiodically.
なお、順次駆動を繰り返す時に、重点的なユニットセルを繰り返し駆動させたり、重点的なユニットセルの駆動時間を長くしたりすることができるように、制御回路4による制御が柔軟な制御であってもよい。これにより、例えば、発振周波数の変化が大きいユニットセルを重点的に駆動させることにより、ユニットセルA11~ALMのそれぞれの発振器20の発振周波数の時間的な変化の分布をより精度よく検出することができる。
Note that the control by the control circuit 4 is flexible so that when the sequential driving is repeated, the intensive unit cells can be repeatedly driven or the intensive unit cell driving time can be extended. Also good. As a result, for example, by intensively driving the unit cell having a large change in the oscillation frequency, the distribution of the temporal change in the oscillation frequency of the oscillator 20 of each of the unit cells A11 to ALM can be detected with higher accuracy. it can.
したがって、センサ装置100は、複数のユニットセルA11~ALMから、それぞれの発振器20の発振周波数の時間的変化と空間的変化とを順次検出することができる。発振器20の発振周波数の時間的変化と空間的変化とは、図9に示した被検査体72の部位73~75のような、被検査体の性質および状態等の局所的な変化と経時的な変化とに起因する。これにより、センサ装置100は、発振器20の発振周波数を変化させるような、被検査体の時間的変化と空間的変化とを順次検出することができる。
Therefore, the sensor device 100 can sequentially detect a temporal change and a spatial change of the oscillation frequency of each oscillator 20 from the plurality of unit cells A11 to ALM. The temporal change and the spatial change of the oscillation frequency of the oscillator 20 are the local change and the temporal change of the property and state of the inspection object such as the parts 73 to 75 of the inspection object 72 shown in FIG. Due to changes. Thereby, the sensor device 100 can sequentially detect a temporal change and a spatial change of the object to be inspected so as to change the oscillation frequency of the oscillator 20.
〔実施形態5〕
本発明の実施形態5について、図12~15に基づいて説明すれば、以下のとおりである。なお、説明の便宜上、前記実施形態にて説明した部材と同じ機能を有する部材については、同じ符号を付記し、その説明を省略する。 [Embodiment 5]
The fifth embodiment of the present invention will be described below with reference to FIGS. For convenience of explanation, members having the same functions as those described in the embodiment are given the same reference numerals, and descriptions thereof are omitted.
本発明の実施形態5について、図12~15に基づいて説明すれば、以下のとおりである。なお、説明の便宜上、前記実施形態にて説明した部材と同じ機能を有する部材については、同じ符号を付記し、その説明を省略する。 [Embodiment 5]
The fifth embodiment of the present invention will be described below with reference to FIGS. For convenience of explanation, members having the same functions as those described in the embodiment are given the same reference numerals, and descriptions thereof are omitted.
前述の実施形態1~4においては、センサ装置100のセンサIC1の表面の一部に被検査体70~72が付着する場合を説明した。実施形態5においては、センサ装置のセンサIC2の全面が水溶液(被検査体76、77)に浸される場合を説明する。
In the above-described first to fourth embodiments, the case where the test objects 70 to 72 are attached to a part of the surface of the sensor IC 1 of the sensor device 100 has been described. In the fifth embodiment, a case where the entire surface of the sensor IC 2 of the sensor device is immersed in an aqueous solution (inspected objects 76 and 77) will be described.
図12は、図1に示したセンサ装置100に含まれる別のセンサIC2の概略構成を示す斜視図である。また、センサIC2の表面が清浄である第1状態を示す図である。
FIG. 12 is a perspective view showing a schematic configuration of another sensor IC 2 included in the sensor device 100 shown in FIG. Moreover, it is a figure which shows the 1st state where the surface of sensor IC2 is clean.
センサIC2は、センサ用の集積回路(Integrated Circuit)である。センサIC2は、半導体基板10と複数のユニットセルA11~ALMとを含み、さらに、封止材16を含む。
The sensor IC 2 is a sensor integrated circuit (Integrated Circuit). The sensor IC 2 includes a semiconductor substrate 10, a plurality of unit cells A11 to ALM, and further includes a sealing material 16.
封止材16は、図示しないボンディングワイヤおよびボンディングパッド等が水溶液に直接に接触しないように、ボンディングワイヤおよびボンディングパッド等を封止する。封止材16の材料および形状等は特に限定しない。
The sealing material 16 seals the bonding wire and the bonding pad so that the bonding wire and the bonding pad (not shown) are not in direct contact with the aqueous solution. The material and shape of the sealing material 16 are not particularly limited.
ユニットセルA11~ALMは、前述の実施形態1と同様に、共振器50の共振周波数が水分および被検査体等により変化するために、共振器50の部分(インダクタ52とキャパシタ54との少なくとも一方)が最上層であるメタル層に形成されている。また、図2の(b)のように、最上層であるメタル層に形成されている共振器50の部分(インダクタ52とキャパシタ54との少なくとも一方)が、保護膜15で覆われ、水溶液(被検査体76、77)に直接には接触しない。
In the unit cells A11 to ALM, since the resonance frequency of the resonator 50 varies depending on moisture, the object to be inspected, etc., as in the first embodiment, the resonator 50 (at least one of the inductor 52 and the capacitor 54). ) Is formed on the uppermost metal layer. Further, as shown in FIG. 2B, the portion of the resonator 50 (at least one of the inductor 52 and the capacitor 54) formed in the metal layer which is the uppermost layer is covered with the protective film 15, and the aqueous solution ( There is no direct contact with the inspected objects 76 and 77).
図12のような、センサIC1の表面が清浄な状態(第1状態)で、制御回路4が複数のユニットセルA11~ALMを順次駆動し、駆動しているユニットセルが出力する信号の周波数を検出回路3が測定する。そして、分周器30の分周比1/Nにより、検出回路3が発振器20の発振周波数を算出する。
In the state (first state) where the surface of the sensor IC 1 is clean as shown in FIG. 12, the control circuit 4 sequentially drives the unit cells A11 to ALM, and sets the frequency of the signal output by the driving unit cell. The detection circuit 3 measures. Then, the detection circuit 3 calculates the oscillation frequency of the oscillator 20 based on the frequency division ratio 1 / N of the frequency divider 30.
図13は、図12に示したセンサIC2の表面が被検査体76に浸されている第2状態を示す図である。
FIG. 13 is a diagram showing a second state in which the surface of the sensor IC 2 shown in FIG.
被検査体76は、半導体基板10の表面を均一に覆い、水溶液である。図13のような、センサIC1の表面が被検査体76に浸されている状態(第2状態)で、制御回路4が複数のユニットセルA11~ALMを順次駆動し、駆動しているユニットセルが出力する信号の周波数を検出回路3が測定する。そして、分周器30の分周比1/Nにより、検出回路3が発振器20の発振周波数を算出する。
The inspection object 76 uniformly covers the surface of the semiconductor substrate 10 and is an aqueous solution. As shown in FIG. 13, in the state where the surface of the sensor IC 1 is immersed in the inspection object 76 (second state), the control circuit 4 sequentially drives the unit cells A11 to ALM to drive the unit cells. The detection circuit 3 measures the frequency of the signal output from. Then, the detection circuit 3 calculates the oscillation frequency of the oscillator 20 based on the frequency division ratio 1 / N of the frequency divider 30.
図14は、図12に示したセンサIC2の表面が被検査体77に浸されている第3状態を示す図である。
FIG. 14 is a diagram illustrating a third state in which the surface of the sensor IC 2 illustrated in FIG.
被検査体77は、被検査体76が変化した水溶液である。被検査体76から被検査体77への変化は、例えば、時間の経過に伴う溶質の変化(濃度の変化、気化、固化、化学的反応の進行等)による、水溶液の性質の変化である。図14のような、センサIC1の表面が被検査体77に浸されている状態(第3状態)で、制御回路4が複数のユニットセルA11~ALMを順次駆動し、駆動しているユニットセルが出力する信号の周波数を検出回路3が測定する。そして、分周器30の分周比1/Nにより、検出回路3が発振器20の発振周波数を算出する。
The inspection object 77 is an aqueous solution in which the inspection object 76 is changed. The change from the test object 76 to the test object 77 is, for example, a change in the properties of the aqueous solution due to a change in solute (e.g., change in concentration, vaporization, solidification, progress of chemical reaction, etc.) over time. As shown in FIG. 14, in the state where the surface of the sensor IC 1 is immersed in the inspection object 77 (third state), the control circuit 4 sequentially drives the unit cells A11 to ALM to drive the unit cells. The detection circuit 3 measures the frequency of the signal output from. Then, the detection circuit 3 calculates the oscillation frequency of the oscillator 20 based on the frequency division ratio 1 / N of the frequency divider 30.
図15は、図12に示したセンサIC2における、第1状態と第2状態と第3状態との発振器20の発振周波数を示す図である。
FIG. 15 is a diagram showing the oscillation frequencies of the oscillator 20 in the first state, the second state, and the third state in the sensor IC 2 shown in FIG.
図15に示すように、検出回路3は、第1状態と第2状態との発振器20の発振周波数の差Δf´´´と、第2状態と第3状態との発振器20の発振周波数の差Δf´´´´と、を算出する。
As shown in FIG. 15, the detection circuit 3 includes a difference Δf ″ ″ of the oscillation frequency of the oscillator 20 between the first state and the second state, and a difference of the oscillation frequency of the oscillator 20 between the second state and the third state. Δf ′ ″ ″ is calculated.
検出回路3は、第1状態と第2状態と発振周波数の差Δf´´´に基づき、被検査体76の性質(物性)の分布および平均値を、誘電率の変化として算出することができる。また、第2状態と第3状態と発振周波数の差Δf´´´´に基づき、被検査体77の性質(物性)の分布および平均値を、誘電率の変化として算出することができる。
The detection circuit 3 can calculate the distribution and average value of the property (physical properties) of the device under test 76 as a change in dielectric constant based on the difference Δf ′ ″ between the first state and the second state and the oscillation frequency. . In addition, based on the difference Δf ′ ″ ″ between the second state and the third state and the oscillation frequency, the distribution of properties (physical properties) and the average value of the inspected object 77 can be calculated as changes in dielectric constant.
〔まとめ〕
本発明の態様1に係るセンサ装置(センサIC1、センサIC2、センサ装置100)は、基板(半導体基板10)と、前記基板に配置された複数の共振器(50)と、を備え、前記複数の共振器は、それぞれ自身の近傍にある被検査体(70~72、76、77)の物性(性質・状態・誘電率等)に応じて共振周波数を変化させ、前記複数の共振器の分布と、前記複数の共振器のそれぞれの前記共振周波数とに基づき、前記被検査体の物性の分布を検出し、前記複数の共振器(50)のうち、互いに隣り合う2つの共振器の中心間距離(行間隔、列間隔)が300μm以下であることを特徴とする。 [Summary]
A sensor device (sensor IC1, sensor IC2, sensor device 100) according toaspect 1 of the present invention includes a substrate (semiconductor substrate 10) and a plurality of resonators (50) disposed on the substrate, Each of the resonators changes the resonance frequency in accordance with the physical properties (properties, state, dielectric constant, etc.) of the inspected objects (70 to 72, 76, 77) in the vicinity of each of the resonators, and distributes the plurality of resonators. And a distribution of physical properties of the object to be inspected based on the resonance frequencies of the plurality of resonators, and the center of two resonators adjacent to each other among the plurality of resonators (50). The distance (row interval, column interval) is 300 μm or less.
本発明の態様1に係るセンサ装置(センサIC1、センサIC2、センサ装置100)は、基板(半導体基板10)と、前記基板に配置された複数の共振器(50)と、を備え、前記複数の共振器は、それぞれ自身の近傍にある被検査体(70~72、76、77)の物性(性質・状態・誘電率等)に応じて共振周波数を変化させ、前記複数の共振器の分布と、前記複数の共振器のそれぞれの前記共振周波数とに基づき、前記被検査体の物性の分布を検出し、前記複数の共振器(50)のうち、互いに隣り合う2つの共振器の中心間距離(行間隔、列間隔)が300μm以下であることを特徴とする。 [Summary]
A sensor device (sensor IC1, sensor IC2, sensor device 100) according to
上記構成によれば、共振器は、電磁波の送受信をするような狭義のアンテナではなく、波長による開口径の制約を受けないため、小面積化が可能である。そして、共振器の小面積化により、基板上の共振器の配置密度を高めることができる。したがって、被検査体の物性の分布を広い範囲で検出することと、空間的分解能を高めることとができる。そして、広い範囲で空間的分解能が高いため、被検査体の物性の局所的な変化を広い範囲で検出することができる。
According to the above configuration, the resonator is not a narrowly-defined antenna that transmits and receives electromagnetic waves, and is not restricted by the aperture diameter depending on the wavelength, so that the area can be reduced. And the arrangement density of the resonator on a board | substrate can be raised by the area reduction of a resonator. Therefore, it is possible to detect the distribution of physical properties of the object to be inspected in a wide range and increase the spatial resolution. Since the spatial resolution is high in a wide range, a local change in physical properties of the object to be inspected can be detected in a wide range.
また、上記構成によれば、被検査体を磁性粒子等で標識しなくてもよい。このため、測定作業を簡易にすることができる。
Moreover, according to the above configuration, the object to be inspected need not be labeled with magnetic particles or the like. For this reason, the measurement work can be simplified.
また、上記構成によれば、共振器の配置密度を増やすことができる。このため、センサ装置の小型化が可能になる。またはセンサ装置の空間的分解能を高めることができる。
Further, according to the above configuration, the arrangement density of the resonators can be increased. For this reason, the sensor device can be miniaturized. Alternatively, the spatial resolution of the sensor device can be increased.
本発明の態様2に係るセンサ装置(センサIC1、センサIC2、センサ装置100)は、態様1に係るセンサ装置であり、前記複数の共振器(50)のうち、少なくとも1つの共振器がインダクタ(52)及びキャパシタ(54)を有し、前記インダクタ及び前記キャパシタの少なくとも一方の形成箇所は、前記基板(10)が有しているメタル層のうち、前記基板と前記被検査体(70~72、76、77)との接触位置に最も近い層を含むことを特徴とする。
A sensor device (sensor IC1, sensor IC2, sensor device 100) according to aspect 2 of the present invention is the sensor device according to aspect 1, and at least one of the plurality of resonators (50) includes an inductor ( 52) and a capacitor (54), and at least one of the inductor and the capacitor is formed in the metal layer of the substrate (10) and the substrate and the device under test (70 to 72). , 76, 77) including the layer closest to the contact position.
上記構成によれば、基板の表面の誘電率又は透磁率等の変化に、最も被検査体に近いメタル層が敏感であるため、被検査体に応じて共振周波数が変化しやすい。このため、センサ装置の感度を高めることができる。
According to the above configuration, since the metal layer closest to the object to be inspected is sensitive to changes in the dielectric constant or permeability of the surface of the substrate, the resonance frequency is likely to change depending on the object to be inspected. For this reason, the sensitivity of the sensor device can be increased.
本発明の態様3に係るセンサ装置(センサIC1、センサIC2、センサ装置100)は、態様1または2に係るセンサ装置であり、前記複数の共振器のそれぞれの前記共振周波数が、30GHz以上200GHz以下であることを特徴とする。
The sensor device (sensor IC1, sensor IC2, sensor device 100) according to aspect 3 of the present invention is the sensor device according to aspect 1 or 2, and the resonance frequency of each of the plurality of resonators is 30 GHz or more and 200 GHz or less. It is characterized by being.
特に30GHz以上200GHz以下の周波数帯域において、水和現象による複素誘電率の変化が大きい。このため、上記構成によれば、被検査体の内部の水分子の運動および水和現象等を測定することができる。
Especially in the frequency band of 30 GHz to 200 GHz, the change in complex permittivity due to the hydration phenomenon is large. For this reason, according to the said structure, the motion of the water molecule inside a to-be-inspected object, a hydration phenomenon, etc. can be measured.
本発明の態様4に係るセンサ装置(センサIC1、センサIC2、センサ装置100)は、態様1~3の何れか1態様に係るセンサ装置であり、前記複数の共振器(50)のうち、少なくとも1つの共振器の平面視におけるサイズが、一辺200μmの正方形に収まるサイズであることを特徴とする。
A sensor device (sensor IC1, sensor IC2, sensor device 100) according to aspect 4 of the present invention is the sensor device according to any one of aspects 1 to 3, and at least of the plurality of resonators (50). The size of one resonator in plan view is a size that fits in a square having a side of 200 μm.
上記構成によれば、共振器の配置密度を増やすことができる。このため、センサ装置の小型化が可能になる。またはセンサ装置の空間的分解能を高めることができる。
According to the above configuration, the arrangement density of the resonators can be increased. For this reason, the sensor device can be miniaturized. Alternatively, the spatial resolution of the sensor device can be increased.
本発明の態様5に係るセンサ装置(100)は、態様1~4の何れか1態様に係るセンサ装置であり、前記複数の共振器(50)のそれぞれに対して1対1対応に設けられ、対応する前記共振器の前記共振周波数を分周する複数の分周器(30)と、前記複数の分周器の出力に基づいて前記複数の共振器のそれぞれの前記共振周波数を推定する検出回路(3)と、を備えることを特徴とする。
A sensor device (100) according to aspect 5 of the present invention is the sensor device according to any one of aspects 1 to 4, and is provided in a one-to-one correspondence with each of the plurality of resonators (50). A plurality of frequency dividers (30) for dividing the resonance frequency of the corresponding resonator, and detection for estimating the resonance frequency of each of the plurality of resonators based on outputs of the plurality of frequency dividers And a circuit (3).
上記構成によれば、分周器により共振周波数が分周されるため、検出回路が扱う信号の周波数帯が、共振周波数帯より低い周波数帯になる。したがって、高い周波数帯を扱えるように検出回路を構成しなくてもよく、検出回路の簡素化および低コスト化が実現できる。
According to the above configuration, since the resonance frequency is divided by the frequency divider, the frequency band of the signal handled by the detection circuit is a frequency band lower than the resonance frequency band. Therefore, the detection circuit need not be configured to handle a high frequency band, and the detection circuit can be simplified and reduced in cost.
本発明の態様6に係るセンサ装置(センサ装置100)は、態様1~5の何れか1態様に係るセンサ装置であり、前記複数の共振器(50)を順次駆動させる制御回路(4)をさらに備えることを特徴とする。
A sensor device (sensor device 100) according to Aspect 6 of the present invention is the sensor device according to any one of Aspects 1 to 5, and includes a control circuit (4) for sequentially driving the plurality of resonators (50). It is further provided with the feature.
上記構成によれば、順次駆動により、同時に駆動している共振器の数が少なくなるため、センサ装置を駆動するための電流およびセンサ装置からの発熱を減らすことができる。発熱を減らすことにより、発熱による被検査体の変質を抑制することができる。また、順次駆動を繰り返すことにより、前記被検査体の分布と物性の分布と物性の変化の分布等の時間的な変化を検出することができる。
According to the above configuration, since the number of resonators that are driven simultaneously is reduced by sequential driving, current for driving the sensor device and heat generation from the sensor device can be reduced. By reducing the heat generation, it is possible to suppress the deterioration of the object to be inspected due to the heat generation. Further, by repeating the driving sequentially, it is possible to detect temporal changes such as the distribution of the object to be inspected, the distribution of physical properties, and the distribution of changes in physical properties.
本発明は上述した各実施形態に限定されるものではなく、請求項に示した範囲で種々の変更が可能であり、異なる実施形態にそれぞれ開示された技術的手段を適宜組み合わせて得られる実施形態についても本発明の技術的範囲に含まれる。さらに、各実施形態にそれぞれ開示された技術的手段を組み合わせることにより、新しい技術的特徴を形成することができる。
The present invention is not limited to the above-described embodiments, and various modifications are possible within the scope shown in the claims, and embodiments obtained by appropriately combining technical means disclosed in different embodiments. Is also included in the technical scope of the present invention. Furthermore, a new technical feature can be formed by combining the technical means disclosed in each embodiment.
1、2 センサIC
3 検出回路
4 制御回路
10 半導体基板
15 保護膜
16 封止材
20、110、120 発振器
30 分周器
40、42 差動回路
50 共振器
52、111、121 インダクタ
54 キャパシタ
60 電流源
70~72、76、77、114、124 被検査体
73~75、141、142 部位
100 センサ装置
A11~ALM ユニットセル
M1~M4 トランジスタ
T_1~T_LM 時間 1, 2 Sensor IC
DESCRIPTION OFSYMBOLS 3 Detection circuit 4 Control circuit 10 Semiconductor substrate 15 Protective film 16 Sealing material 20, 110, 120 Oscillator 30 Divider 40, 42 Differential circuit 50 Resonator 52, 111, 121 Inductor 54 Capacitor 60 Current source 70-72, 76, 77, 114, 124 Inspected object 73 to 75, 141, 142 Site 100 Sensor device A11 to ALM Unit cell M1 to M4 Transistor T_1 to T_LM Time
3 検出回路
4 制御回路
10 半導体基板
15 保護膜
16 封止材
20、110、120 発振器
30 分周器
40、42 差動回路
50 共振器
52、111、121 インダクタ
54 キャパシタ
60 電流源
70~72、76、77、114、124 被検査体
73~75、141、142 部位
100 センサ装置
A11~ALM ユニットセル
M1~M4 トランジスタ
T_1~T_LM 時間 1, 2 Sensor IC
DESCRIPTION OF
Claims (5)
- 基板と、
前記基板に配置された複数の共振器と、を備え、
前記複数の共振器は、それぞれ、自身の近傍にある被検査体の物性に応じて共振周波数を変化させ、
前記複数の共振器の分布と、前記複数の共振器のそれぞれの前記共振周波数とに基づき、前記被検査体の物性の分布を検出し、
前記複数の共振器のうち、互いに隣り合う2つの共振器の中心間距離が300μm以下であることを特徴とするセンサ装置。 A substrate,
A plurality of resonators disposed on the substrate,
Each of the plurality of resonators changes the resonance frequency according to the physical properties of the object to be inspected in the vicinity of the resonator,
Based on the distribution of the plurality of resonators and the resonance frequency of each of the plurality of resonators, the distribution of physical properties of the object to be inspected is detected,
A sensor device, wherein a distance between centers of two resonators adjacent to each other among the plurality of resonators is 300 μm or less. - 前記複数の共振器のうち、少なくとも1つの共振器がインダクタ及びキャパシタを有し、
前記インダクタ及び前記キャパシタの少なくとも一方の形成箇所は、前記基板が有しているメタル層のうち、前記基板と前記被検査体との接触位置に最も近い層を含むことを特徴とする請求項1に記載のセンサ装置。 Among the plurality of resonators, at least one resonator has an inductor and a capacitor,
2. The formation location of at least one of the inductor and the capacitor includes a layer closest to a contact position between the substrate and the object to be inspected among metal layers of the substrate. The sensor device according to 1. - 前記複数の共振器のそれぞれの共振周波数が、30GHz以上200GHz以下であることを特徴とする請求項1または2に記載のセンサ装置。 The sensor device according to claim 1 or 2, wherein a resonance frequency of each of the plurality of resonators is 30 GHz or more and 200 GHz or less.
- 前記複数の共振器のうち、少なくとも1つの共振器の平面視におけるサイズが、一辺200μmの正方形に収まるサイズであることを特徴とする請求項1から3の何れか1項に記載のセンサ装置。 The sensor device according to any one of claims 1 to 3, wherein a size of at least one of the plurality of resonators in a plan view is a size that fits in a square having a side of 200 µm.
- 前記複数の共振器のそれぞれに対して1対1対応に設けられ、対応する前記共振器の前記共振周波数を分周する複数の分周器と、
前記複数の分周器の出力に基づいて前記複数の共振器のそれぞれの前記共振周波数を推定する検出回路と、を備えることを特徴とする請求項1から4の何れか1項に記載のセンサ装置。 A plurality of frequency dividers that are provided in a one-to-one correspondence with each of the plurality of resonators and divide the resonance frequency of the corresponding resonator;
5. A sensor according to claim 1, further comprising: a detection circuit that estimates the resonance frequency of each of the plurality of resonators based on outputs of the plurality of frequency dividers. apparatus.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015139938 | 2015-07-13 | ||
| JP2015-139938 | 2015-07-13 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2017010177A1 true WO2017010177A1 (en) | 2017-01-19 |
Family
ID=57756897
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2016/065773 WO2017010177A1 (en) | 2015-07-13 | 2016-05-27 | Sensor device |
Country Status (1)
| Country | Link |
|---|---|
| WO (1) | WO2017010177A1 (en) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017187463A (en) * | 2016-04-05 | 2017-10-12 | シャープ株式会社 | Sensor device, detection method, and sensor unit |
| WO2017175879A1 (en) * | 2016-04-05 | 2017-10-12 | シャープ株式会社 | Sensor device, detection method, and sensor unit |
| JP2021503069A (en) * | 2017-10-16 | 2021-02-04 | サントル ナシオナル ドゥ ラ ルシェルシェ シアンティフィクCentre National De La Recherche Scientifique | Detection sensor with sensor cell with high electron mobility transistor and ring resonator |
| US10976651B2 (en) | 2016-10-12 | 2021-04-13 | Sony Corporation | Image display apparatus and light source apparatus |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07306172A (en) * | 1994-05-12 | 1995-11-21 | Mitsubishi Electric Corp | Mixing ratio detector for fuel |
| JP2011513755A (en) * | 2008-03-07 | 2011-04-28 | カリフォルニア インスティテュート オブ テクノロジー | Changes in effective inductance based on magnetic particle detection |
| WO2014130023A1 (en) * | 2013-02-20 | 2014-08-28 | Empire Technology Development Llc | Nanotube sensors for conducting solutions |
-
2016
- 2016-05-27 WO PCT/JP2016/065773 patent/WO2017010177A1/en active Application Filing
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07306172A (en) * | 1994-05-12 | 1995-11-21 | Mitsubishi Electric Corp | Mixing ratio detector for fuel |
| JP2011513755A (en) * | 2008-03-07 | 2011-04-28 | カリフォルニア インスティテュート オブ テクノロジー | Changes in effective inductance based on magnetic particle detection |
| WO2014130023A1 (en) * | 2013-02-20 | 2014-08-28 | Empire Technology Development Llc | Nanotube sensors for conducting solutions |
Non-Patent Citations (4)
| Title |
|---|
| HUA WANG ET AL.: "A Frequency-Shift Based CMOS Magnetic Biosensor with Spatially Uniform Sensor Transducer Gain", IEEE CUSTOM INTEGRATED CIRCUITS CONFERENCE (CICC, 2010, pages 1 - 4, XP031786843 * |
| M. ABIDI ET AL.: "Sensing Liquid Properties Using Split-Ring Resonator in Mm-wave Band", IECON 2010 - 36TH ANNUAL CONFERENCE ON IEEE INDUSTRIAL ELECTRONICS SOCIETY, 2010, XP031840552 * |
| S. GUHA ET AL.: "An 8 GHz CMOS Near Field Bio- sensor Array for Imaging Spatial Permittivity Distribution of Biomaterials", 2014 IEEE MTT-S INTERNATIONAL MICROWAVE SYMPOSIUM (IMS2014, 2014, pages 1 - 4, XP032615317 * |
| S. VEHRING ET AL.: "Permittivity Sensor based on 60 GHz Patch Antenna", 2015 GERMAN MICROWAVE CONFERENCE, 16 March 2015 (2015-03-16), pages 311 - 314, XP032776451 * |
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2017187463A (en) * | 2016-04-05 | 2017-10-12 | シャープ株式会社 | Sensor device, detection method, and sensor unit |
| WO2017175879A1 (en) * | 2016-04-05 | 2017-10-12 | シャープ株式会社 | Sensor device, detection method, and sensor unit |
| US10690611B2 (en) | 2016-04-05 | 2020-06-23 | Sharp Kabushiki Kaisha | Sensor device, detection method, and sensor unit |
| US10976651B2 (en) | 2016-10-12 | 2021-04-13 | Sony Corporation | Image display apparatus and light source apparatus |
| JP2021503069A (en) * | 2017-10-16 | 2021-02-04 | サントル ナシオナル ドゥ ラ ルシェルシェ シアンティフィクCentre National De La Recherche Scientifique | Detection sensor with sensor cell with high electron mobility transistor and ring resonator |
| JP7100026B2 (en) | 2017-10-16 | 2022-07-12 | サントル ナシオナル ドゥ ラ ルシェルシェ シアンティフィク | Detection sensor with sensor cell with high electron mobility transistor and ring resonator |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2017010177A1 (en) | Sensor device | |
| JP6416398B2 (en) | Sensor circuit | |
| Pla et al. | Strain-induced spin-resonance shifts in silicon devices | |
| Thai et al. | Novel design of a highly sensitive RF strain transducer for passive and remote sensing in two dimensions | |
| US7830695B1 (en) | Capacitive arrangement for qubit operations | |
| US8047713B2 (en) | Plasmon resonance detector | |
| US9140678B2 (en) | Integrated circuit arrangement, device and gas detection method | |
| Volk et al. | Fast charge sensing of Si/SiGe quantum dots via a high-frequency accumulation gate | |
| US9291600B2 (en) | Piezoresistive NEMS array network | |
| Chen et al. | Hydrogen sensor based on Pd-functionalized film bulk acoustic resonator | |
| KR20160010348A (en) | Capacitance testing structure and capacitance testing method for monitoring film thickness of dielectrics | |
| JP6538186B2 (en) | Sensor circuit | |
| US10718730B2 (en) | Sensor device | |
| Bagci et al. | Dual-band measurement of complex permittivity in a microwave waveguide with a flexible, thin and sensitive metamaterial-based sensor | |
| Schultheiß et al. | Unveiling alternating current electronic properties at ferroelectric domain walls | |
| Otxoa et al. | Quantum interference capacitor based on double-passage Landau-Zener-Stückelberg-Majorana interferometry | |
| Hempel et al. | Advanced application of the impedance spectrum of a lateral field excited sensor | |
| Mahmoodi et al. | Active frequency selective surface for strain sensing | |
| Mohammed et al. | Analysis fin field-effect transistor design with high-k insulators | |
| Apih et al. | NMR and NQR study of above-room-temperature molecular ferroelectrics diisopropylammonium chloride and diisopropylammonium perchlorate | |
| JP6486740B2 (en) | Sensor IC | |
| Pecora et al. | Interdigitated sensorial system on flexible substrate | |
| Nanayakkara et al. | A liquid drop RC filter apparatus for detection | |
| Zhang et al. | A microwave sensor array for water quality testing | |
| Orsini et al. | Chemical sensors and chemical sensor systems: Fundamentals limitations and new trends |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 16824157 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| NENP | Non-entry into the national phase |
Ref country code: JP |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 16824157 Country of ref document: EP Kind code of ref document: A1 |