WO2016174993A1 - Measurement device - Google Patents
Measurement device Download PDFInfo
- Publication number
- WO2016174993A1 WO2016174993A1 PCT/JP2016/060901 JP2016060901W WO2016174993A1 WO 2016174993 A1 WO2016174993 A1 WO 2016174993A1 JP 2016060901 W JP2016060901 W JP 2016060901W WO 2016174993 A1 WO2016174993 A1 WO 2016174993A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- unit
- rotation
- magnet
- rotating
- magnetic field
- Prior art date
Links
Images














Classifications
-
- A—HUMAN NECESSITIES
- A61—MEDICAL OR VETERINARY SCIENCE; HYGIENE
- A61B—DIAGNOSIS; SURGERY; IDENTIFICATION
- A61B5/00—Measuring for diagnostic purposes; Identification of persons
- A61B5/05—Detecting, measuring or recording for diagnosis by means of electric currents or magnetic fields; Measuring using microwaves or radio waves
- A61B5/055—Detecting, measuring or recording for diagnosis by means of electric currents or magnetic fields; Measuring using microwaves or radio waves involving electronic [EMR] or nuclear [NMR] magnetic resonance, e.g. magnetic resonance imaging
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/28—Details of apparatus provided for in groups G01R33/44 - G01R33/64
- G01R33/30—Sample handling arrangements, e.g. sample cells, spinning mechanisms
- G01R33/307—Sample handling arrangements, e.g. sample cells, spinning mechanisms specially adapted for moving the sample relative to the MR system, e.g. spinning mechanisms, flow cells or means for positioning the sample inside a spectrometer
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/28—Details of apparatus provided for in groups G01R33/44 - G01R33/64
- G01R33/38—Systems for generation, homogenisation or stabilisation of the main or gradient magnetic field
- G01R33/3806—Open magnet assemblies for improved access to the sample, e.g. C-type or U-type magnets
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N24/00—Investigating or analyzing materials by the use of nuclear magnetic resonance, electron paramagnetic resonance or other spin effects
- G01N24/10—Investigating or analyzing materials by the use of nuclear magnetic resonance, electron paramagnetic resonance or other spin effects by using electron paramagnetic resonance
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01N—INVESTIGATING OR ANALYSING MATERIALS BY DETERMINING THEIR CHEMICAL OR PHYSICAL PROPERTIES
- G01N24/00—Investigating or analyzing materials by the use of nuclear magnetic resonance, electron paramagnetic resonance or other spin effects
- G01N24/12—Investigating or analyzing materials by the use of nuclear magnetic resonance, electron paramagnetic resonance or other spin effects by using double resonance
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/28—Details of apparatus provided for in groups G01R33/44 - G01R33/64
- G01R33/38—Systems for generation, homogenisation or stabilisation of the main or gradient magnetic field
- G01R33/383—Systems for generation, homogenisation or stabilisation of the main or gradient magnetic field using permanent magnets
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/44—Arrangements or instruments for measuring magnetic variables involving magnetic resonance using nuclear magnetic resonance [NMR]
- G01R33/445—MR involving a non-standard magnetic field B0, e.g. of low magnitude as in the earth's magnetic field or in nanoTesla spectroscopy, comprising a polarizing magnetic field for pre-polarisation, B0 with a temporal variation of its magnitude or direction such as field cycling of B0 or rotation of the direction of B0, or spatially inhomogeneous B0 like in fringe-field MR or in stray-field imaging
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/60—Arrangements or instruments for measuring magnetic variables involving magnetic resonance using electron paramagnetic resonance
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01R—MEASURING ELECTRIC VARIABLES; MEASURING MAGNETIC VARIABLES
- G01R33/00—Arrangements or instruments for measuring magnetic variables
- G01R33/20—Arrangements or instruments for measuring magnetic variables involving magnetic resonance
- G01R33/62—Arrangements or instruments for measuring magnetic variables involving magnetic resonance using double resonance
Definitions
- the present invention relates to a measuring apparatus and a measuring method using magnetic resonance.
- a magnetic resonance imaging (MRI) apparatus that images nuclear magnetic resonance (NMR) in a living body, an electron spin resonance imaging (ESRI) apparatus that images electron spin resonance (ESR) of unpaired electrons of free radicals, etc. are known.
- ESRI electron spin resonance imaging
- DNP dynamic nuclear polarization
- An MRI apparatus is known (for example, Patent Documents 1 to 3).
- Patent Documents 4 to 6 a rotary MRI apparatus that rotates a magnet that forms a static magnetic field for MRI and a magnet that forms a static magnetic field for ESR with respect to a stationary subject to generate an MRI image of the subject.
- Patent Documents 4 to 6 [Patent Document 1] JP 2006-204551 [Patent Document 2] JP 2011-527222 [Patent Document 3] JP 2007-316008 [Patent Document 4] International Publication No. 2014/196525 [Patent Document 3] Document 5] Japanese Patent Application Laid-Open No. 2010-227247 [Patent Document 6] International Publication No. 2014/007124
- the time for which the subject is placed in the static magnetic field depends on the width of the magnet in the rotation direction.
- the conventional rotary MRI apparatus in order to change the time for generating ESR and NMR and the transition time from ESR to NMR, it is necessary to change the width and arrangement of the magnets.
- magnets used in a rotary MRI apparatus and the like are large and heavy, and it has been desired to operate the apparatus more safely while rotating the magnet.
- the first magnet provided in the first range on the circumference around the rotation axis, and the first range on the circumference around the rotation axis A second magnet provided in a different second range, a drive unit that rotates the first magnet and the second magnet around the rotation axis, and the rotation of the first magnet and the second magnet
- a control unit that changes the rotational speeds of the first magnet and the second magnet in accordance with the positions of the first magnet and the second magnet with respect to the installation position.
- the measurement is provided in a space between the pair of rotation units provided at different positions in the axial direction with respect to the rotation axis and rotating about the rotation axis, and the pair of rotation units.
- a non-rotating unit for installing a target wherein at least one of the pair of rotating units is housed in a first range on a circumference around the rotating shaft in the rotating unit, and the pair of rotating units A first magnet that generates a first magnetic field in a space between the rotation units; and a second range that is different from the first range on the circumference around the rotation axis in the rotation unit. And a second magnet for generating a second magnetic field in the space between the rotating units.
- the schematic block diagram of the measuring device 10 in this embodiment is shown. It is the schematic of the measuring device 10 of FIG. 1 observed from the upper side. It is an example of the measuring apparatus 10 observed from diagonally upward.
- 1 is a schematic view of a rotation module 100 of a measuring device 10.
- FIG. An example of the rotation unit 110b including the jacket 101b is shown.
- An example of the jacket 101b in this embodiment is shown.
- An example of the processing flow of the measuring device 10 in this embodiment is shown.
- 3 is a schematic diagram showing the position of a rotating unit 110a of the measuring apparatus 10.
- FIG. 3 is a schematic diagram showing the position of a rotating unit 110a of the measuring apparatus 10.
- FIG. 3 is a schematic diagram showing the position of a rotating unit 110a of the measuring apparatus 10.
- FIG. 3 is a schematic diagram showing the position of a rotating unit 110a of the measuring apparatus 10.
- FIG. 3 is a schematic diagram showing the position of a rotating unit 110a of the measuring apparatus 10.
- FIG. 3 is a schematic diagram showing the position of a rotating unit 110a of the measuring apparatus 10.
- FIG. An example of rotation speed control by the control unit 230 is shown.
- the measurement apparatus 30 which concerns on the modification of this embodiment is shown. 2 shows an example of a hardware configuration of a computer 1900.
- FIG. 1 shows a schematic configuration diagram of a measuring apparatus 10 in the present embodiment.
- the measurement apparatus 10 includes ESR magnets and MRI magnets, and includes rotation units 110a and 110b that rotate about the rotation axis AX, and measures an ESR signal, NMR signal, or the like of the measurement target 20.
- the measuring device 10 includes a rotating module 100, a rotating shaft member 140, a bearing portion 142a, a bearing portion 142b, a housing 146, a support 150, a base 152, a target protecting portion 156, a roller 158, power A transmission unit 160, a drive unit 170, a non-rotating unit 180, a measurement unit 200, an abnormality detection unit 210, an input unit 220, a control unit 230, and a display unit 240 are provided.
- the rotation module 100 is a movable module in the measuring apparatus 10 and includes a pair of rotation units 110a and 110b (hereinafter, collectively referred to as “rotation unit 110” as appropriate).
- the measuring apparatus 10 includes a rigid rotation shaft member (Shaft) 140 serving as a rotation axis (Axis) AX, and the pair of rotation units 110a and 110b differs in the axial direction with respect to the rotation shaft member 140. It is fixed at a position and rotates around the rotation axis AX.
- the measuring device 10 may not be provided with the rigid rotating shaft member 140 but may rotate about the virtual rotating axis AX.
- the rotating unit 110a and the rotating unit 110b are collectively referred to as a first magnet 112a and a first magnet 112b (hereinafter, appropriately referred to as “first magnet 112”) that generate a first magnetic field toward the space between the pair of rotating units 110. ), And a second magnet 114a and a second magnet 114b (hereinafter collectively referred to as “second magnet 114” where appropriate) that generate a second magnetic field.
- first magnet 112 a and a first magnet 112b
- second magnet 114b hereinafter collectively referred to as “second magnet 114” where appropriate
- the upper (+ Z direction side) rotation unit 110a includes a first magnet 112a and a
- the lower ( ⁇ Z direction side) rotation unit 110b includes a first magnet 112b and
- the second magnet 114b is included.
- at least one of the first magnet 112 and the second magnet 114 may be provided only in one of the rotation units 110a and 110b.
- the rotation units 110a and 110b are provided at different positions on the rotation axis AX and rotate together around the rotation axis AX.
- the rotation units 110a and 110b rotate so as to maintain the relative positions of the first magnets 112a and 112b and the second magnets 114a and 114b.
- the rotation module 100 generates a substantially constant first magnetic field and second magnetic field while rotating.
- the first magnets 112a to 112b and the second magnets 114a to 114b are arranged so that the directions of the magnetic poles are aligned in the same direction in an opposed state.
- the first magnets 112a and 112b are disposed relative to each other so that the upper side is the north pole and the lower side is the south pole.
- the second magnet 114a and the second magnet 114b are disposed so as to face each other so that the upper side is an N pole and the lower side is an S pole.
- the first magnets 112a and 112b are ESR permanent magnets that provide a first magnetic field for inducing electron spin resonance of the measurement target 20, and the second magnets 114a and 114b perform nuclear magnetic resonance of the measurement target 20.
- a permanent magnet for MRI that provides a second magnetic field to evoke.
- the first magnets 112a to 112b have a lower magnetic force than the second magnets 114a to 114b.
- the first magnetic field of the first magnets 112a to 112b may be 5 mT
- the second magnets 114a to 114b The two magnetic fields may be 0.3T.
- the second magnetic field may be, for example, in the range of 0.1T to 3T in the measuring apparatus 10 that measures the human body, and is, for example, up to 7T or more if the measuring object is other than the human body. There may be.
- the first magnetic field may be within a range of 1 mT to 0.1 T, for example, and is determined according to the strength of the second magnetic field.
- the rotating unit 110 has a jacket that houses and fixes the first magnet 112 and the second magnet 114. Details of the structure of the pair of rotating units 110 will be described later.
- the rotation shaft member 140 is fixed to the rotation unit 110 so as to constitute the rotation axis AX of the rotation unit 110, and thereby becomes a physical central axis of rotation of the rotation unit 110.
- the rotating shaft member 140 is provided in the vertical direction (that is, the vertical direction: the Z direction in the drawing) and rotates along the horizontal plane (XY plane).
- the rotating shaft member 140 also functions as a back yoke that passes a magnetic path that passes through the second magnets 114a and 114b, and thus is formed using a magnetic material.
- the rotating shaft member 140 may be made of a nonmagnetic material having excellent strength and corrosion resistance, such as a nonmagnetic stainless steel material and a brass material. You may use what used.
- the bearing part 142a and the bearing part 142b (hereinafter collectively referred to as “bearing part 142” as appropriate) support the rotating shaft member 140 on both sides outside the pair of rotating units 110.
- the bearing portion 142a supports the rotating shaft member 140 in a rotatable state above the rotating unit 110a
- the bearing portion 142b supports the rotating shaft member 140 in a rotatable state below the rotating unit 110b.
- the bearing portion 142 can hold
- the bearing portion 142 may include a sliding mechanism using various bearings or fluids.
- the housing 146 protects the measuring device 10 from the outside, accommodates at least a part of the measuring device 10, and supports the measuring device 10.
- the housing 146 covers and houses the pair of rotating units 110, the bearing portion 142, and the non-rotating unit 180.
- the housing 146 may include a frame and a plate.
- the housing 146 may have a structure in which a skeleton is formed by the frame and the outside of the skeleton is covered by the plate.
- the housing 146 may have a box shape, and supports the load of the rotating module 100 that is mainly rotated by the frame, and the plate conceals and protects the inside of the measuring device 10 from the outside.
- the frame and the plate may be formed using a metal such as steel and aluminum, or a strong material such as a resin.
- the housing 146 may have a multiple structure in which a frame for attaching an exterior plate is provided on the outside of the skeleton that supports the bearing 142, the non-rotating unit 180, and the like.
- the support column 150 is disposed at the lower part of the casing 146 and supports the load of the rotating module 100 and the casing 146 together with the base 152.
- the base 152 is disposed on the ground or floor, and serves as a base that supports the entire measuring apparatus 10 by fixing the support 150.
- the strut 150 and the base 152 may be a part of the housing 146 or may be provided separately from the housing 146.
- the target protection unit 156 extends from the frame of the housing 146 to a space between the pair of rotation units 110, and at least one of the upper rotation unit 110 a and the lower rotation unit 110 b should be detached from the rotation shaft member 140. Even in the case of being stuck, the measurement object 20 is protected by being sandwiched between the rotating unit 110a and the rotating unit 110b to ensure a gap between them. Thereby, for example, even when the upper rotary unit 110a has fallen off the rotary shaft member 140, the rotary unit 110a can be prevented from dropping.
- the target protection unit 156 may be provided at two or more locations on the housing 146.
- the target protection unit 156 may have substantially the same height as the interval between the first rotation unit 110a and the second rotation unit 110b (for example, a height of 70 to 95% of the interval), thereby further increasing the rotation unit 110a. In addition, a sufficient interval between the rotary units 110b is secured, and the impact is reduced even when the rotary unit 110a drops off the rotary shaft member 140 and falls. Further, the target protection unit 156 may be provided with a roller for smooth rotation of the rotation unit 110a and / or the rotation unit 110b on the upper surface and / or the lower surface.
- target protection unit 156 is not essential, and may be omitted according to the manner in which the rotating unit 110a and the rotating unit 110b are fixed to the rotating shaft member 140, and according to the strength of the non-rotating unit 180 described later.
- rollers 158 are attached to the housing 146 and support the pair of rotating units 110 in a rotatable state. Thereby, the roller 158 stabilizes the rotation of the pair of rotating units 110 and improves the safety of the measuring device 10.
- the roller 158 may be provided with a rotation sensor and / or a vibration sensor, and the measurement device 10 may monitor the rotation state of the rotation unit 110.
- the roller 158 contacts a jacket (described later) portion of the rotation units 110a and 110b.
- the rollers 158 may be provided so as to be in contact with the top and bottom of the pair of rotation units 110.
- a roller may be provided between the rotation unit 110a and the ceiling portion of the housing 146 and / or between the rotation unit 110b and the bottom surface of the housing 146, thereby stabilizing the rotation of the rotation unit 110.
- the roller 158 may be omitted if the rotation stability of the rotation module 100 can be sufficiently secured.
- the power transmission unit 160 transmits the power from the drive unit 170 to the rotating shaft member 140 to rotate the rotating shaft member 140.
- the power transmission unit 160 may include a speed reducer or a transmission, and the rotation input from the drive unit 170 along the input shaft is decelerated and transmitted to the rotary shaft member 140 in the same or different direction as the input shaft. Good.
- the drive unit 170 generates power by a motor or the like and applies power to the rotary shaft member 140 via the power transmission unit 160 to rotate the rotary shaft member 140, whereby the first magnet 112a-b and the second magnet 114a. ⁇ b is rotated about the rotation axis AX.
- the drive unit 170 may include, for example, a servo motor whose rotation speed can be controlled by a servo mechanism or a motor connected to an inverter. Thereby, the drive part 170 can adjust the rotation speed of the rotating shaft member 140 by adjusting the rotation speed input into the power transmission part 160.
- the driving unit 170 may change the rotation speed continuously or discontinuously. Further, the driving unit 170 may repeat the stop and rotation.
- the driving unit 170 may include a rotation angle sensor that detects a rotation angle on the motor rotation shaft, and supply the rotation angle of the motor rotation shaft to the control unit 230.
- the sensor that detects the rotation angle may include an encoder, a resolver, and the like.
- the control unit 230 may calculate the rotation angle of the rotation shaft member 140 from the rotation angle of the motor rotation shaft and the reduction ratio of the power transmission unit 160.
- a sensor that detects the rotation angle may be provided in the output shaft of the rotation shaft member 140 or the power transmission unit 160 and supply the rotation angle of the rotation shaft member 140 to the control unit 230.
- the non-rotating unit 180 is a fixed module that is provided in a space between the pair of rotating units 110 and is fixed to the rotating unit 110, and the measurement target 20 is installed therein.
- the non-rotating unit 180 includes a coil unit 184, a gradient magnetic field generation unit 188, and a static magnetic field adjustment unit 190.
- the coil unit 184 includes an ESR coil unit (not shown) and an NMR transmit / receive coil unit (not shown).
- the coil portion for ESR generates an electromagnetic wave for inducing electron spin resonance in the measurement target 20 in a state where the first magnetic field is applied to the measurement target 20.
- the transmit / receive coil unit for NMR includes an RF coil, and in a state where a second magnetic field is applied to the measurement target 20, generates an electromagnetic wave having a predetermined frequency and transmits (irradiates) the measurement target 20 with a nucleus. Magnetic resonance is induced and an NMR signal generated by the measurement object 20 is received.
- the gradient magnetic field generator 188 applies a gradient magnetic field to the measurement target 20.
- the gradient magnetic field generator 188 has XYZ three-direction gradient magnetic field coils, and generates a gradient magnetic field in each of the three directions.
- the gradient magnetic field generation unit 188 enables the coil unit 184 to receive the NMR signal at an arbitrary plane in the three-dimensional space, and allows the measurement apparatus 10 to generate MRI information in the three-dimensional space.
- the static magnetic field adjustment unit 190 is provided at a position predetermined with respect to the installation position of the measurement target 20 (up and down of the measurement target 20 in the drawing), and includes the first magnets 112a to 112b and the second magnets 114 to b. Changes the strength of at least one of the first magnetic field and the second magnetic field applied to the measurement target 20.
- the static magnetic field adjustment unit 190 according to the present embodiment has a static magnetic field adjustment coil for making the intensity of the first magnetic field variable according to the control of the control unit 230, and determines the strength of the static magnetic field by the first magnetic field. Moderate.
- the static magnetic field adjusting coil generates different static magnetic fields depending on the measurement target 20 and the composition to be measured on the measurement target 20.
- the static magnetic field adjustment unit 190 changes the intensity of the static magnetic field applied to the measurement target 20 and causes NMR to measure the dynamic nuclear polarization generated by inducing ESR. Measure radical species. Furthermore, the static magnetic field adjustment unit 190 adjusts the optimum static magnetic field according to each of a plurality of types of radicals included in the measurement target 20 to induce ESR and perform NMR measurement, so that the measurement apparatus 10 can perform a plurality of radicals. Enables seeds to be imaged.
- the measuring unit 200 is provided with a non-rotating unit 180 to which each of the first magnetic field generated by the first magnet and the second magnetic field generated by the second magnet is provided in accordance with the rotation of the first magnet and the second magnet.
- the NMR signal of the measurement object 20 placed at the position is measured at a predetermined timing.
- the measurement unit 200 measures the NMR signal from the measurement target 20 received by the RF coil in response to the generation of electromagnetic waves having a predetermined frequency from the RF coil of the coil unit 184.
- the measurement unit 200 measures the measurement object 20 in a state in which the nuclear magnetic resonance is induced in the measurement object 20 by the second magnetic field after the electron spin resonance is induced in the measurement object 20 by the first magnetic field. Thereby, the measurement part 200 can receive the NMR signal amplified by the dynamic nuclear polarization produced by inducing electron spin resonance. The measurement unit 200 supplies the received NMR signal to the control unit 230.
- the abnormality detection unit 210 is attached to the measurement apparatus 10 and detects an abnormality of the measurement apparatus 10.
- the abnormality detection unit 210 includes a vibration sensor unit, and is attached to the housing 146 to detect horizontal vibration and vertical vibration of the housing 146.
- the abnormality detection unit 210 supplies the detected vibration information to the control unit 230.
- the measurement device 10 may include various sensors for detecting an abnormality of the measurement device 10 as the abnormality detection unit 210 in addition to the vibration sensor.
- the measurement device 10 may include a magnetic sensor, a temperature sensor, a sound sensor, a displacement sensor, and / or a humidity sensor.
- the input unit 220 inputs an instruction or the like from the user to the measuring device 10.
- the input unit 220 is connected to an input device such as a mouse, a keyboard, and / or a touch panel, and supplies a user instruction input from these input devices to the control unit 230.
- the control unit 230 controls the entire operation of the measuring device 10.
- the control unit 230 controls the measurement unit 200 to control the drive unit 170 and rotate the rotating shaft member 140 to induce ESR on the measurement target 20 and / or perform NMR measurement.
- the control unit 230 controls the rotation speeds of the motors of the driving unit 170 connected to the rotation shaft member 140, thereby controlling the rotation speeds of the first magnets 112a and 112b and the second magnets 114a and 114b. Measurement is performed while rotating the rotating unit 110.
- the control unit 230 causes the gradient magnetic field generation unit 188 to generate a predetermined gradient magnetic field at the timing when the measurement object 20 is irradiated with the first magnetic field while rotating the rotation unit 110, and the coil unit. ESR is generated by irradiating the measurement target 20 with an electromagnetic wave having a predetermined frequency from the coil portion for ESR in 184. Then, the control unit 230 causes the gradient magnetic field generation unit 188 to generate a predetermined gradient magnetic field at a timing at which the measurement object 20 is irradiated with the second magnetic field while the rotation of the rotation unit 110 is maintained.
- the measurement object 20 is irradiated with an electromagnetic wave having a predetermined frequency from the RF coil to cause NMR, and the measurement unit 200 receives the NMR signal.
- the control unit 230 may change the strength of the magnetic field generated by the static magnetic field adjustment coil in the coil unit 184 depending on whether the measurement target 20 is given the first magnetic field or the second magnetic field. .
- the control unit 230 when the first magnetic field is applied to the measurement target 20, the control unit 230 generates a magnetic field having a strength corresponding to the composition to be measured from the static magnetic field adjustment coil.
- the control unit 230 images the NMR signal received from the measurement unit 200. For example, the control unit 230 calculates an NMR signal and performs image processing to generate an MRI image.
- the control unit 230 acquires three-dimensional information of the measurement target 20 (for example, a three-dimensional distribution of water molecules or free radicals of the measurement target 20) from the NMR signal obtained under a three-dimensional gradient magnetic field, and the three-dimensional information.
- An MRI image based on the may be generated. Since the control unit 230 causes ESR in the measurement target 20, in addition to the normal MRI image, the control unit 230 can generate an MRI image (DNP-MRI image) using the measurement target ESR and DNP.
- the control unit 230 may change the rotation speed of the rotating shaft member 140 according to the positions of the first magnet 112 and the second magnet 114 with respect to the installation position of the measurement target 20 during measurement of the measurement target 20. Thereby, the control part 230 can control the time when the 1st magnetic field by the 1st magnet 112 and the 2nd magnetic field by the 2nd magnet 114 are given to the measuring object 20, and can control ESR and NMR of the measuring object 20. .
- a specific example of the rotation speed control by the control unit 230 will be described later.
- control unit 230 detects that the abnormality detection unit 210 detects an abnormality of the measurement device 10 using various sensors, for example, an abnormal displacement that exceeds a reference of a component such as the rotating module 100, or a vibration that exceeds a reference value.
- the rotation of the pair of rotation units 110 is stopped, or the rotation speed of the pair of rotation units 110 is decreased to ensure safety.
- the display unit 240 displays information regarding the measuring apparatus 10 during and before and after the operation.
- the display unit 240 may display an MRI image and / or an ESR spectrum generated by the control unit 230.
- the display unit 240 may display the rotational position and / or rotational speed of the rotary unit 110.
- the first magnet 112 for ESR and the second magnet 114 for NMR are covered and stored in the pair of rotation units, and this is centered on the rotation axis AX.
- the rotating unit 180 is rotated. Therefore, according to the measurement apparatus 10 of the present embodiment, ESR induction and NMR measurement of the measurement target 20 can be performed more safely than the conventional method of rotating the magnet itself described in Patent Document 3 and the like.
- the time during which ESR and NMR are generated in the measurement target 20 can be controlled by controlling the rotation speed of the rotating unit 110 during rotation.
- the measurement device 10 may have a configuration that does not include any of the elements described.
- the measurement apparatus 10 may not include the roller 158 and / or the abnormality detection unit 210.
- FIG. 2 is a schematic view of the measuring apparatus 10 of FIG. 1 observed from above.
- the housing 146 includes a plurality of upper frames 148 that form a lattice structure.
- the bearing portion 142a is mounted and fixed on the lattice structure of the upper frame 148, and supports the rotating shaft member 140 from above.
- maintains the rotation unit 110 from the upper side, and improves the stability of the measuring device 10 whole.
- the target protection unit 156 is fixed to a frame portion that is a column on the side where the non-rotating unit 180 is not provided in the four corners of the housing 146, and is provided so as to extend from the column to the center.
- the non-rotating unit 180 has a strength capable of protecting the measurement target 20, and therefore, the target protection unit is provided on the column on which the non-rotating unit 180 is provided. 156 is not provided separately.
- an area surrounded by a dotted line in FIG. 2 shows an example of an area where the non-rotating unit 180 is located.
- the non-rotating unit is provided on at least one side surface of the housing 146 and has a certain size so that the measurement target 20 can be arranged.
- the non-rotating unit 180 is detachably attached to the guide fixed to the housing 146 and the measurement apparatus 10 main body, and is fitted to the guide to be attached to the measurement apparatus 10 main body.
- Non-rotating unit 180 main body is
- FIG. 3 is an example of the measuring apparatus 10 observed from obliquely above.
- the housing 146 may be covered with an external cover 147.
- An opening 183 for guiding the measurement target 20 to the non-rotating unit 180 is provided in a part of the outer cover 147 on the front side of the measuring device 10.
- the measurement apparatus 10 may measure a part of the body by inserting a part of the body into the non-rotating unit 180 from the opening 183.
- the measuring apparatus 10 may measure the entire body by allowing a human body or the like to enter the housing 146 through the opening 183 and lie down on the installation surface of the non-rotating unit 180.
- the non-rotating unit 180 can slide with respect to the housing 146 and be detachable through the opening 183.
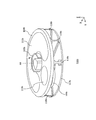
- FIG. 4 is a schematic diagram of the rotation module 100 of the measuring apparatus 10.
- Each of the pair of rotating units 110 has a rotating disc shape having opposing surfaces.
- each of the pair of rotating units 110 has a substantially disk shape.
- the area above the plane PL parallel to the XY plane corresponds to the rotation unit 110a
- the area below the plane PL corresponds to the rotation unit 110b.
- the rotation unit 110a includes a jacket 101a, a first back yoke 102a and a first magnet yoke portion 103a, a second back yoke 104a and a second magnet yoke portion 105a, a first pole piece 115a, a second pole piece 116a, a support plate 117a, Furthermore, the support 118a is further included.
- the jacket 101a stores the first magnet 112a and the second magnet 114a of the rotating unit 110a in a fixed state.
- the specific structure of the jacket 101a will be described later.
- the first back yoke 102a and the first magnet yoke portion 103a are provided adjacent to the first magnet 112a and allow the magnetic flux of the first magnet 112a to pass through.
- the first back yoke 102a and the first magnet yoke portion 103a according to the present embodiment are in contact with each other to form a magnetic path, and the first magnet yoke portion 103a reaches the first back yoke 102a from the upper side of the first magnet 112a.
- the magnetic flux of the first magnet 112a is guided to the first back yoke 102a.
- the first back yoke 102a is formed along the rotation axis AX, and guides the magnetic flux from the first magnet 112a to the first back yoke 102b on the rotation unit 110b side.
- the second back yoke 104a and the second magnet yoke portion 105a are provided adjacent to the second magnet 114a and allow the magnetic flux of the second magnet 114a to pass therethrough.
- the second back yoke 104a and the second magnet yoke portion 105a according to the present embodiment are integrally formed to form a magnetic path.
- the second magnet yoke portion 105a is formed in a portion from the upper side of the jacket 101a to the rotating shaft member 140, and guides the magnetic flux of the second magnet 114a to the second back yoke 104a.
- the second back yoke 104a overlapping the rotation axis AX guides the magnetic flux of the second magnet 114a to the second back yoke 104b on the rotation unit 110b side.
- the second back yoke 104a includes a support column that overlaps the rotation axis AX of the rotation unit 110a, and the first back yoke 102a forms a part of the circumference along the outside of the support column. It is provided as follows.
- the first pole piece 115a is provided at the edge of the exposed portion of the first magnet 112a exposed from the opening of the jacket 101a to the lower side of the jacket 101a, and the magnetic field of the first magnet 112a spreads outside the rotating unit 110a.
- the second pole piece 116a is provided at the edge of the exposed portion of the second magnet 114a exposed from the opening of the jacket 101a to the lower side of the jacket 101a, and the magnetic field of the second magnet 114a is outside the rotating unit 110a. To prevent spreading.
- the support plate 117a is fixed to the shaft member of the rotating shaft member 140, and fixes the jacket 101a to the rotating shaft member 140 via the support column 118a and the second magnet yoke portion 105a.
- the support plate 117a may be formed of a nonmagnetic metal material having high rigidity such as stainless steel and aluminum, or a nonmagnetic material such as resin having sufficient strength, and has a rotating disk shape such as a disk or a polygon.
- the one or more support columns 118a are provided to fix the jacket 101a to the support plate 117a, thereby increasing the rigidity of the entire rotation unit 110a including the jacket 101a.
- the support column 118a may be formed of the same material as the support plate 117a or the like, and may be, for example, an H-shaped steel having a H-shaped cross section.
- the jacket 101a When sufficient rigidity can be maintained by providing the jacket 101a with a sufficient thickness, it is not necessary to provide the support plate 117a and the support column 118a on the rotating unit 110a, and the jacket 101a is directly attached to the rotating shaft member 140. 101a may be fixed.
- the rotation unit 110b includes a jacket 101b, a first back yoke 102b and a first magnet yoke portion 103b, a second back yoke 104b and a second magnet yoke portion 105b, a first pole piece 115b, a second pole piece 116b, a support plate 117b, In addition, the support 118b is further included.
- the rotation unit 110b may have a shape obtained by inverting the rotation unit 110a with respect to the XY plane.
- the jacket 101b stores the first magnet 112b and the second magnet 114b of the rotating unit 110b in a fixed state.
- the jacket 101b may have the same form as the jacket 101a.
- the first back yoke 102b and the first magnet yoke portion 103b are provided adjacent to the first magnet 112b and allow the magnetic flux of the first magnet 112b to pass therethrough.
- the second back yoke 104b and the second magnet yoke portion 105b are provided adjacent to the second magnet 114b and allow the magnetic flux of the second magnet 114b to pass therethrough.
- first back yoke 102b, the first magnet yoke portion 103b, the second back yoke 104b, and the second magnet yoke portion 105b include the first back yoke 102a, the first magnet yoke portion 103a, the second back yoke 104a, Since it has the same function and structure as the second magnet yoke portion 105a, the description thereof will be omitted unless necessary.
- the first back yoke 102b may be connected and fixed to the first back yoke 102a of the rotating unit 110a, or may be integrated with the first back yoke 102a to constitute a single member.
- the second back yoke 104b may be connected and fixed to the second back yoke 104a of the rotating unit 110a, or may be integrated with the second back yoke 104a to form a single member. Thereby, the rotation unit 110a and the rotation unit 110b can rotate integrally.
- the first pole piece 115b is provided at the edge of the exposed portion of the first magnet 112b exposed from the opening of the jacket 101b to the upper side of the jacket 101b.
- the second pole piece 116b is provided at the edge of the exposed portion of the second magnet 114b exposed from the opening of the jacket 101b to the upper side of the jacket 101b.
- the first pole piece 115b and the second pole piece 116b of the rotation unit 110b, the support plate 117b, and the column 118b are the first pole piece 115a and the second pole piece 116a of the rotation unit 110a, the support plate 117a, and the column 118a. May be formed in the same manner.
- FIG. 5 shows an example of the rotating unit 110b including the jacket 101b.
- the support plate 117b supports one surface of the jacket 101b via the support column 118b and the second magnet yoke portion 105b.
- the jacket 101b has a first range 111b for accommodating the first magnet 112b and a second range 113b for accommodating the second magnet 114b.
- the first range 111b is fixed with respect to the rotation axis AX and is located in a region on the circumference around the rotation axis AX.
- the second range 113b is fixed with respect to the rotation axis AX and is located in a different area from the first range 111b on the circumference around the rotation axis AX.
- the rotating unit 110a also has a first range 111a (not shown) corresponding to the first magnet 112a, and a second range 113a (not shown) corresponding to the second magnet 114a. It is done.
- the first range 111b and the second range 113b of the rotation unit 110b are provided at positions facing the first range 111a and the second range 113a of the rotation unit 110a. That is, the rotation unit 110b may be one in which the rotation unit 110a is turned upside down and is opposed to the rotation unit 110a so that the first magnet 112 and the second magnet 114 face each other.
- FIG. 6 shows a view of an example of the jacket 101b according to the present embodiment as viewed obliquely from below in FIG. Since the jacket 101a has substantially the same structure as the jacket 101b, the description thereof will be omitted unless necessary.
- the jacket 101b may be a disk provided with a first opening 107b, a second opening 108b, and a third opening 109b.
- the jacket 101b may be formed of a nonmagnetic metal having high rigidity such as stainless steel or aluminum, or a nonmagnetic material such as resin having sufficient strength.
- the jacket 101b has a thickness for housing the first magnet 112b and the second magnet 114b, and may have a thickness of 1 to 200 mm, for example. Further, when the support plate 117b and the support column 118b are not used, the jacket 101b may be made thicker.
- the jacket 101b has a surface opposite to the surface facing the measurement target 20 (that is, in the jacket 101b, at least part of the first magnet 112b and the second magnet 114b from the lower side in FIG.
- the first opening 107b has substantially the same size as the first magnet 112b or larger than the first magnet 112b
- the second opening 108b has substantially the same size as the second magnet 114b.
- the first opening 107b has substantially the same shape as the first magnet 112b and may correspond to the first range 111b.
- the second magnet 114b has substantially the same shape and may correspond to the second range 113b.
- the first magnet 112b and the second magnet 114b are locked in the first opening 107b and the second opening 108b, and the first magnet 112b and the second magnet 114b are moved to the measurement target 20 side. It has a locking portion 106 that prevents it from coming out.
- the locking portion 106 is a protrusion or a step provided along the periphery of the first opening 107b and the second opening 108b on the bottom side facing the measurement target 20, and is integrated with the main body portion of the jacket 101b. Formed.
- the jacket 101b can prevent the first magnet 112b and the second magnet 114b from falling off when being accommodated.
- the jacket 101b may fix the first magnet 112b and the second magnet 114b with a known fixture such as a bolt or a fastener.
- the jacket 101b safely accommodates and fixes the first magnet 112b through the first opening 107b, and prevents the first magnet 112b from dropping off when the rotation unit 110b rotates. Further, the jacket 101b safely accommodates and fixes the second magnet 114b in the second opening 108b, and prevents the second magnet 114b from dropping off when the rotation unit 110b rotates. That is, the jacket 101b safely fixes the first magnet 112b and the second magnet 114b by forming a disk including the first magnet 112b and the second magnet 114b.
- the third opening 109b has a size and a shape that allow the first back yoke 102b and the second back yoke 104b to pass therethrough, and allows the magnetic fluxes of the first magnet 112b and the second magnet 114b to pass therethrough.
- the first magnet 112b is fixed with respect to the rotation axis AX and is accommodated in a first range 111b on the circumference around the rotation axis AX.
- the first range 111b is an arc shape (for example, a C shape) formed by a circle (radius r 2 : r 2 ⁇ r 1 ) that moves on the circumference of the radius r 1 centered on the rotation axis AX.
- the first magnet 112b may be a magnet provided in the whole or at least a part of the inside of the outer edge of the first range 111b.
- the first magnet 112b can apply a static magnetic field to the measurement target 20 for a relatively long time during which the arc portion corresponding to the first range 111 overlaps the measurement target 20 during the rotation of the rotation unit 110b.
- a spacer member for adjusting the weight and / or balance of the entire jacket 101b may be disposed on the jacket 101b.
- the second magnet 114b is fixed with respect to the rotation axis AX and is accommodated in a second range 113b different from the first range 111b on the circumference around the rotation axis AX.
- the first range 111b may have a wider range on the circumference than the second range 113b.
- the second range 113b may be circular with a radius r 3 (r 3 ⁇ r 1 ), and the second magnet 114b may be a frame-shaped magnet along the outer edge of the second range 113b. Accordingly, the second magnet 114b can apply a static magnetic field to the measurement target 20 for a relatively short time when the circle overlaps the measurement target 20 while the rotation unit 110b is rotating.
- a spacer member for adjusting the weight and / or balance of the entire jacket 101b may be disposed on the jacket 101b.
- first magnet 112b and the second magnet 114b may have different shapes from those in FIG.
- first magnet 112b may be circular and the second magnet 114b may be arc-shaped, both circular, or both arc-shaped.
- the rotation unit 110b can adopt a configuration in which one or a plurality of correction magnetic bodies or magnets are attached to appropriate positions on the measurement target 20 side of the first magnet 112b and the second magnet 114b. Thereby, the rotation unit 110b can provide a more uniform static magnetic field to the measurement target 20.
- the rotating units 110a and 110b employ a configuration in which the surface of the jackets 101a and 101b facing the measurement target 20 is covered with a nonmagnetic material such as an acrylic plate and preferably a nonconductive cover. Also good.
- At least one of the rotation units 110a to 110b is positioned on the position detection sensor or measuring device 10 main body side at the end of the first range 111 in the rotation direction and the end of the second range 113 in the rotation direction.
- the control unit 230 outputs the trigger signal at the timing when the head / end of the first range and the head / end of the second range in the rotating unit 110 reach the reference position (for example, a predetermined position on the non-rotating unit 180).
- the rotation speed can be changed using the trigger signal.
- FIG. 7 shows an example of the processing flow of the measuring apparatus 10 in the present embodiment.
- the measurement apparatus 10 measures the measurement target 20 by executing the processes of S700 to S770.
- the measurement apparatus 10 has two types of operation modes: a DNP-MRI mode that generates a DNP-MRI image and an MRI mode that generates an MRI image that does not cause the occurrence of electron spin resonance.
- the control unit 230 changes the rotation speed of the rotary shaft member 140 according to the positions of the first magnet 112 and the second magnet 114 with respect to the installation position of the measurement target 20 during measurement of the measurement target 20.
- the rotation module 100 is stopped and a second magnetic field is applied to the measurement target 20 to measure nuclear magnetic resonance (S765 to S770).
- the measuring apparatus 10 performs an initialization process. For example, the measuring apparatus 10 performs power-on processing, start-up processing of the control unit 230, reading of specified parameters necessary for measurement, check that no abnormality has occurred, detection of the initial position of the rotation module 100, or return to the initial position. And the calibration of the rotation speed and the magnetic field of various coils.
- the control unit 230 of the measurement apparatus 10 includes, as a part of the specified parameter, the first angle range from the start angle to the end angle in the first range where the first magnet 112 is provided in the rotation module 100, the first angle range, The second angle range from the start angle to the end angle in the second range in which the two magnets 114 are provided, the first transition angle range in the first transition period from the end angle of the first range to the start angle of the second range, The second transition angle range of the second transition period from the end angle of the two ranges to the start angle of the first range is read as a specified parameter.
- step S ⁇ b> 705 the control unit 230 performs operation setting by inputting measurement parameters used for the current measurement from the user or operator of the measurement apparatus 10 via the input unit 220.
- the measurement apparatus 10 may receive measurement parameters stored in advance in an external computer or the like via a network and perform operation settings.
- the control unit 230 acquires a mode setting for measuring in either the DNP-MRI mode or the MRI mode as an example of a measurement parameter.
- the control unit 230 sets an ESR period for determining the rotation speed of the rotation module 100 in a period during which the first magnetic field is applied to the measurement target 20 (hereinafter referred to as “ESR period”);
- An NMR period setting for determining the rotation speed of the rotation module 100 during a period in which the second magnetic field is applied to the measurement object 20 hereinafter referred to as “NMR period”
- NMR period an NMR period setting for determining the rotation speed of the rotation module 100 during a period in which the second magnetic field is applied to the measurement object 20
- the transition period setting for determining the rotation speed of the is acquired.
- the control unit 230 may receive measurement parameters for determining the ESR period, the NMR period, and the transition period in various formats. For example, the controller 230 may control the first rotation speed (for example, angular speed) during the ESR period, the second rotation speed during the first transition period during which the ESR period transitions to the NMR period, the third rotation speed during the NMR period, and the ESR from the NMR period. The fourth rotational speed of the second transition period that transitions to the period can be directly received.
- first rotation speed for example, angular speed
- the fourth rotational speed of the second transition period that transitions to the period can be directly received.
- control unit 230 can receive the type of composition to be measured as a measurement parameter.
- the control unit 230 stores in advance a correspondence relationship between the type of composition to be measured and the ESR period, NMR period, first transition period, and second transition period required for the composition as a table.
- the length of the ESR period, the NMR period, and the transition period can be determined by referring to the table according to the type of the designated composition. Then, the controller 230 calculates a rotation speed for rotating the first angle range during the ESR period to obtain a first rotation speed for the ESR period, and rotates the first transition angle range during the first transition period.
- the rotation speed to be calculated is set as the second rotation speed in the first transition period
- the rotation speed for rotating the second angular range is calculated during the NMR period
- the second transition period Rotational speed for rotating the second transition angle range during this period is calculated as the fourth rotational speed in the second transition period.
- the second transition period from the end of the NMR period to the start of the ESR period is less necessary to be determined according to the type of composition, and may be constant regardless of the type of composition.
- control unit 230 receives a measurement parameter indicating the magnitude of the magnetic field to be generated from the static magnetic field adjustment coil in the static magnetic field adjustment unit 190 during the ESR period according to the type of composition to be measured.
- control unit 230 can also store the magnitude of the magnetic field to be generated from the static magnetic field adjustment coil in advance in the above table according to the type of the composition to be measured, and can acquire the magnitude from this table.
- control unit 230 when there are a plurality of types of compositions to be measured, the control unit 230 generates ESR period settings, NMR period settings, transition period settings, and static magnetic field adjustment coils corresponding to each of the plurality of types of compositions. Get the magnitude of the magnetic field to be used.
- the measurement target 20 is installed in the non-rotating unit 180.
- a labeled sample may be introduced into the measurement target 20 in advance.
- a radical to be used for detection is introduced into the measurement target 20.
- the measuring device 10 can measure the redox metabolism in the living body in real time and perform image analysis when the living body or the like is the measurement target 20.
- the control unit 230 determines which one of the DNP-MRI mode and the MRI mode is designated.
- the control unit 230 rotates the rotating shaft member 140 and arranges the rotating unit 110 at the initial position (measurement start position) for the DNP-MRI mode.
- the measuring device 10 is disposed at a position where the first range in which the first ESR magnet 112a is disposed is immediately before the non-rotating unit 180 in the rotation direction.
- FIG. 8 is a schematic diagram showing the position of the rotating unit 110a of the measuring apparatus 10 before the start of the operation in the DNP-MRI mode in S710.
- the rotating unit 110a (and the rotating unit 110b) rotates clockwise as an example, and the non-rotating unit 180 in which the measurement target 20 is installed is arranged on the upper side of the rotating unit 110 in the drawing.
- the control unit 230 controls the position of the rotation unit 110 so that the right end portion of the first range 111a is arranged on the left side of the measurement target 20.
- the control unit 230 may temporarily stop the rotation unit 110 after detecting that the position of the rotation unit is correctly set by the rotation angle sensor of the drive unit 170.
- the process (the process of S715) may be performed.
- control unit 230 advances the process to S765.
- the control unit 230 determines the rotation speeds of the rotation shaft member 140 and the rotation unit 110 as the first rotation speed while the first magnetic field generated by the first magnet 112 is applied to the measurement target 20. Change to Thereby, the control part 230 rotates the rotation unit 110 at the 1st rotation speed set for ESR.
- the control unit 230 may rotate the rotation unit 110 at a constant rotation speed at the first rotation speed while the measurement target 20 overlaps the first range 111.
- FIG. 9 is a schematic diagram showing the position of the rotating unit 110a of the measuring apparatus 10 in S715.
- the control unit 230 controls the rotation speed of the drive unit 170 in a state where the measurement target 20 overlaps the first range 111 to rotate the rotation unit 110 clockwise at the first rotation speed.
- the first rotation speed will be described later.
- the control unit 230 controls the static magnetic field adjustment unit 190 to generate the magnetic field determined in S705 from the static magnetic field adjustment coil. 1 Change the strength of the magnetic field. Thereby, the control unit 230 changes the strength of the static magnetic field according to the composition to be measured (for example, radical species), sets the resonance point according to the radical species, and is included in the measurement target 20 as a result.
- the radical species to be identified can be specified.
- the control unit 230 changes the strength of the magnetic field generated from the static magnetic field adjustment coil according to the composition to be measured in the current NMR measurement (S745). Accordingly, the control unit 230 can apply the first magnetic field to the measurement target 20 a plurality of times while changing the intensity of the magnetic field generated from the static magnetic field adjustment coil as the processes from S715 to S755 are repeated.
- the measurement apparatus 10 causes electron spin resonance (ESR) of the measurement target 20.
- ESR electron spin resonance
- the control unit 230 irradiates the measurement target 20 with a predetermined electromagnetic wave from the coil portion for ESR of the coil unit 184, and the measurement target 20 is subjected to dynamic nucleus.
- DNP causes polarization
- the control unit 230 emits an electromagnetic wave of 130 to 150 MHz from the ESR coil unit depending on the type of the composition.
- the control unit 230 may stop the oscillation of the coil unit 184 during a part of the period during which the measurement target 20 passes through the first magnetic field, and adjust the ESR induction time in S25.
- the control unit 230 advances the process to S730 when the measurement target 20 does not overlap the first range 111 in the first transition period.
- the control unit 230 may advance the process to S730 after detecting that the measurement target 20 does not overlap the first range 111 by the rotation angle sensor of the drive unit 170.
- the measurement apparatus 10 determines the rotation speed of the rotation unit 110 during the first transition period (that is, until the second magnet 114 faces the measurement target 20 after the first magnet 112 does not face the measurement target 20 (that is, The magnetic field applied to the measurement target 20 is changed to the second rotation speed determined with respect to the first magnetic field to the second magnetic field.
- the control unit 230 rotates the rotation unit 110 at the second rotation speed set for the first transition period. The second rotation speed will be described later.
- FIG. 10 is a schematic diagram showing the position of the rotating unit 110a of the measuring apparatus 10 in S730.
- the control unit 230 controls the drive unit 170 and the like at the second rotation speed until the measurement target 20 is removed from the state where it overlaps the first range 111a and until it overlaps the second range 113a.
- the control unit 230 may rotate the rotation unit 110 at the second rotation speed until the rotation angle sensor of the drive unit 170 detects that the measurement target 20 starts to overlap the second range 113a.
- control unit 230 stops the static magnetic field change by stopping the generation of the magnetic field from the static magnetic field adjusting coil of the gradient magnetic field generating unit 188.
- the measurement apparatus 10 changes the rotation speed of the rotation unit 110 to the third rotation speed in the NMR period in which the second magnetic field generated by the second magnet 114 is applied to the measurement target 20.
- the control part 230 rotates the rotation unit 110 at the 3rd rotation speed set for NMR.
- the control unit 230 may rotate the rotation unit 110 at a third rotation speed at a constant speed while the measurement target 20 overlaps the second range 113.
- the third rotation speed will be described later.
- FIG. 11 is a schematic diagram showing the position of the rotating unit 110a of the measuring apparatus 10 in S740.
- the control unit 230 controls the drive unit 170 and the like to rotate the rotation unit 110 clockwise at the third rotation speed.
- the control unit 230 may start the process of S740 after detecting that the measurement target 20 starts to overlap the second range 113a by the rotation angle sensor of the driving unit 170.
- the measurement apparatus 10 causes nuclear magnetic resonance of the measurement target 20.
- the control unit 230 generates a predetermined gradient magnetic field from the gradient magnetic field generation unit 188 while the measurement target 20 overlaps the second range 113, and generates a predetermined electromagnetic wave from the RF coil of the coil unit 184 to the measurement target 20.
- the control unit 230 may irradiate an electromagnetic wave of about 13 MHz from the RF coil.
- the measurement unit 200 receives the NMR signal from the measurement target 20 by the RF coil of the coil unit 184 and supplies it to the control unit 230.
- the control unit 230 generates an MRI image of the measurement target 20 based on the NMR signal.
- the control part 230 can measure the measuring object 20 by giving a 2nd magnetic field to the measuring object 20 every time after giving a 1st magnetic field in connection with giving a 1st magnetic field to the measuring object 20 in multiple times.
- dynamic nuclear polarization is induced in the nuclear spin of the measurement target 20 by the induction of ESR in S725.
- the control unit 230 can generate an MRI image (DNP-MRI image) including a resonance signal from a nuclear spin in which dynamic nuclear polarization has been induced.
- the DNP-MRI image includes distribution information of electron spins of unpaired electrons. Therefore, the control unit 230 can indicate the distribution of free radicals including unpaired electrons of the measurement target 20 in the DNP-MRI image.
- the control unit 230 generates an MRI image that does not involve the energy transition from the ESR and does not involve the DNP indicating the water molecule distribution of the measurement target 20 by omitting the electromagnetic wave irradiation from the ESR coil unit in S725. You can also Further, the control unit 230 generates an image in which the distribution of free radicals including unpaired electrons in the measurement target 20 is further emphasized by generating an image obtained by taking the difference between the MRI image not accompanied by DNP from the DNP-MRI image. May be.
- MRI images of a plurality of slices may be generated.
- the control unit 230 switches a plurality (for example, 2 to 2) of the measurement unit 200 while switching the gradient magnetic field of the electromagnetic wave applied to the measurement target 20 while the second magnet 114 is once opposed to the measurement target 20 in the second range 113. 10 times) and a plurality of MRI images may be generated based on the measurement result.
- the controller 230 can efficiently generate an MRI image of the measurement target 20 by generating an MRI image of a plurality of slices.
- the measurement apparatus 10 determines the rotation speed of the rotation unit 110 during the second transition period from when the second magnet 114 is no longer opposed to the measurement target 20 to when the first magnet 112 is opposite the measurement target 20. That is, it is set to the fourth rotation speed with respect to (while the magnetic field applied to the measurement target 20 is switched from the second magnetic field to the first magnetic field). Thereby, the control unit 230 rotates the rotation unit 110 at the fourth rotation speed set for the second transition period. The fourth rotation speed will be described later.
- FIG. 12 is a schematic diagram showing the position of the rotating unit 110a of the measuring apparatus 10 in S750.
- the control unit 230 controls the drive unit 170 and the like at the fourth rotation speed until the measurement target 20 is out of the state where it overlaps the second range 113a and until it overlaps the first range 111a. Rotate clockwise.
- the control unit 230 may rotate the rotation unit 110 at the fourth rotation speed until the rotation angle sensor of the drive unit 170 detects that the measurement target 20 overlaps the first range 111a.
- control unit 230 determines whether or not the measurement of the measurement target 20 is to be terminated. For example, the control unit 230 generates a predetermined number of MRI images for each type of composition to be measured, or starts measuring whether a predetermined region of the measurement target 20 has been measured. It is determined whether a predetermined end condition such as whether a predetermined time has elapsed or not is satisfied.
- control unit 230 determines that the measurement is not finished, the control unit 230 returns the process to S715 and repeats the processes of S715 to S750.
- the control unit 230 starts the process of S715 from the state in which the measurement target 20 overlaps the first range 111 again.
- the control unit 230 uses the first to fourth rotational speeds and the static magnetic field strengths associated with the compositions to measure the next composition.
- the processing of S715 to S750 is performed.
- the control unit 230 performs the processes of S715 to S750 by changing the gradient magnetic field applied to the measurement target 20 in S745 in order to generate an MRI image of a plurality of slices of the measurement target 20.
- the control unit 230 quickly stops the rotation of the rotation unit 110.
- the control unit 230 may control the driving unit 170 to move the second magnet 114 to a preset position.
- the control unit 230 may stop the rotation in a state where the first magnet 112 and the second magnet 114 of the rotation unit 110 are located away from the measurement target 20 side.
- the safety of the measurement target 20 or the like can be ensured by stopping the rotation by separating the second magnet 114 having the strong magnetic force most away from the measurement target 20 or the operator.
- control unit 230 causes the display unit 240 to display the MRI image generated as a result of the measurement in S760.
- the control unit 230 receives the operation of the user or operator via the input unit 220, and performs various display processes such as enlargement / reduction of the MRI image, frame advance, change of the slice direction, and image filter processing according to the operation. Do.
- control unit 230 stores the generated MRI image in a storage device internally or via a network.
- the control unit 230 advances the process to S765.
- the control unit 230 rotates the rotation module 100 so that the second magnets 114a and 114b are opposed to the measurement target 20.
- the control part 230 stops rotation of the rotation module 100 in the state which provided the 2nd magnetic field to the measuring object 20.
- the control unit 230 may stop the rotation of the rotation module 100 in a state where the rotation angle sensor of the drive unit 170 detects that the measurement target 20 overlaps the second range 113a.
- the control unit 230 collects NMR signals for a plurality of slices of the measurement target 20 while changing the gradient magnetic field, and generates an MRI image. That is, the control unit 230 generates a gradient magnetic field corresponding to the measurement location, and irradiates the measurement target 20 with a predetermined electromagnetic wave from the coil unit 184 to cause NMR in the measurement target 20. Next, the control unit 230 receives the NMR signal from the RF coil of the coil unit 184 via the measurement unit 200 and generates an MRI image of the measurement target 20 based on the NMR signal. The control unit 230 stops the rotation of the rotation module 100 and repeats this process in a state where the measurement target 20 is in the second magnetic field, thereby generating an MRI image. When the generation of the MRI image is completed, the control unit 230 advances the process to S760.
- control unit 230 controls at least one of the first to fourth rotational speeds to be different from the others. Accordingly, the control unit 230 changes the rotation speed (that is, the angular speed) according to the positional relationship between the measurement target 20 and the rotation unit 110 while the rotation unit 110 makes one rotation around the rotation shaft member 140.
- the measurement of the measurement target 20 can be realized in accordance with the type of composition to be measured and the restrictions on the measurement time.
- control unit 230 may make the third rotation speed during the MRI process lower than the first rotation speed during the ESR process. Thereby, the control unit 230 can stably measure a larger number of slices by reducing the noise due to the magnetic field fluctuation during the MRI process and extending the time during which the measurement target 20 is in the second magnetic field. it can.
- control unit 230 increases the rotation speed of the rotating shaft in at least a part of the transition period as compared with the period in which the first magnet 112 is opposed to the measurement target 20 or the period in which the second magnet 114 is opposed. Good.
- the controller 230 may increase the second rotation speed and / or the fourth rotation speed with respect to the first rotation speed and / or the third rotation speed in at least a part of the transition period.
- the controller 230 may control the second rotation speed and the fourth rotation speed so that the transition period is 0.3 seconds or less.
- control unit 230 quickly advances the rotation of the rotation module 100 from the first range 111 for ESR to the second range 113 for NMR, and / or the rotation of the rotation module 100 from the second range 113 for MRI. It is possible to quickly advance to the first range 111 for ESR. For this reason, the measuring apparatus 10 can start NMR measurement before the relaxation time elapses after the electron spin excitation of the measurement target 20 by ESR, for example.
- control unit 230 is predetermined from a state in which the first magnet 112 (or the second magnet 114) is not opposed to the measurement target 20 until the second magnet 114 (or the first magnet 112) is opposed to the measurement target 20.
- the second rotation speed and the fourth rotation speed which are the rotation speeds of the rotary shaft member 140 within the range of the predetermined period, may be limited to a predetermined upper limit value or less regardless of the first rotation speed and the third rotation speed. .
- the first to fourth rotation speeds are set to 0.5 to 0.12 RPS or the like in accordance with the target time from ESR initiation to NMR measurement, the NMR relaxation time, and the like.
- the control unit 230 may set the first rotation speed for ESR and / or the third rotation speed for MRI according to the type of composition to be measured. That is, the nature of the electron spin distribution of unpaired electrons varies depending on the type of free radical species in the composition included in the measurement target 20. Therefore, the control unit 230 can generate an appropriate time ESR and / or NMR by controlling the first rotation speed and / or the third rotation speed according to the type of the composition of the measurement target 20.
- control unit 230 may set the first rotation speed and / or the third rotation speed according to the type of the measurement target 20.
- the control unit 230 sets the first rotation speed and / or the third rotation speed according to the size of the measurement target 20, the material, the type of living organism, and / or the type of organ.
- control unit 230 may appropriately stop the rotation of the rotation unit 110 during the process.
- the control unit 230 may temporarily stop the rotation during the NMR measurement in S210.
- the third rotation speed is zero.
- control unit 230 may appropriately rotate and stop the rotation of the rotation unit 110 as appropriate during the process.
- the control unit 230 controls the drive unit 170, thereby controlling the rotation speed of the rotation unit 110.
- the time for generating ESR and NMR in the measurement object 20 the transition time from ESR initiation to NMR measurement, and the time for transition from NMR measurement to ESR initiation again.
- NMR measurement can be performed while suppressing the loss of NMR induced by DNP, and a desired number of slices can be measured in the NMR measurement. Therefore, according to the measurement device 10, the measurement accuracy and measurement efficiency of the measurement device 10 can be improved.
- FIG. 13 shows an example of rotation speed control by the control unit 230 when the processing flow of FIG. 7 is executed.
- the control unit 230 first rotates the rotation unit 110 from the stationary state (rotation speed 0) at the first rotation speed in the first rotation, and executes ESR in S725.
- the control unit 230 increases the rotation speed to a second rotation speed higher than the first rotation speed so that the measurement target 20 is positioned from the first range 111 for ESR to the second range 113 for NMR. (S730).
- the control unit 230 decelerates to a third rotation speed that is lower than the first rotation speed, and executes NMR measurement in S745.
- the control unit 230 increases the rotation speed to a fourth rotation speed higher than the first rotation speed and the third rotation speed, and the measurement target 20 changes from the second range 113 for MRI to the first range 111 for ESR. (S750).
- FIG. 13 shows an example in which the control unit 230 rotates the rotating unit 110 at a constant speed and a constant angular acceleration within a predetermined range. That is, in this example, the rotation unit 110 discretely changes the angular acceleration to achieve the first to fourth rotation speeds, but the control unit 230 gives the rotation unit 110 continuous angular acceleration, The first to fourth rotation speeds may be changed within each period. Thereby, the measuring apparatus 10 can give a smoother change in the rotation speed to the rotation unit 110, and can reduce the distortion of the magnetic field due to a sudden change in the rotation speed.
- the second and fourth rotation speeds in the transition period are set to the first, third and third rotation speeds in the ESR period and the NMR period as shown in FIG.
- the rotational speed may be changed linearly or smoothly between the first rotational speed and the third rotational speed instead of being higher than the rotational speed.
- the measurement device 10 causes the control unit 230 to respond to the characteristics of the magnet mounted on the rotation unit 110 and the type of the measurement target 20 (for example, the type and / or composition of the radical included in the measurement target 20).
- the rotation speed can be appropriately adjusted according to the relaxation time.
- FIG. 14 shows a measuring apparatus 30 according to a modification of the present embodiment.
- the rotating shaft member 340 may be provided in a substantially horizontal direction.
- the rotation module 300 includes a pair of rotation units 310a and a rotation unit 310b (hereinafter, collectively referred to as “rotation unit 310” as appropriate) that rotate together with the rotation shaft member 340 constituting the rotation axis AX. Similar to the rotation unit 110, the rotation unit 310 has a first range 312 in which the first magnet for ESR is arranged, and a second range 314 in which the second magnet for NMR is arranged.
- the non-rotating unit 380 may be provided above the rotation axis AX.
- the non-rotating unit 380 may be arranged above the rotation axis AX so that the main surface is parallel to the rotation axis AX, and the measurement object 20 may be arranged thereon.
- the non-rotating unit 380 may be provided on the side of the rotation axis AX.
- the non-rotating unit 380 may be placed on the front side of the rotation axis AX so that the main surface is parallel to the rotation axis AX.
- the installation surface of the measurement target 20 in the non-rotating unit 380 may be provided so as to be integrated with, for example, the floor of a building / room where measurement is performed.
- the measuring device 30 can store the drive part including the rotating shaft member 340 under the floor, and can set the measurement object 20 on the floor or on the inspection table on the floor to measure.
- the measuring device 30 may include a roller 350 that is rotatably connected to the pair of rotating units 310 below the installation surface of the non-rotating unit 380.
- the roller 350 can apply a rotational force to the rotation unit 310 instead of / in addition to the rotation of the rotation shaft member 140.
- the measuring device 30 may provide two or more rollers for each of the rotation units 310.
- the measurement device 10 of the present embodiment and the measurement device 30 of the modification may further include a heater.
- the control unit 230 controls the temperature of each magnet inside the rotation unit 110 and the rotation unit 310 (hereinafter collectively referred to as “the rotation unit 110 etc.”) by controlling the heater.
- the measuring apparatus 10 etc. can finely adjust the strength of the static magnetic field by each magnet.
- the measuring device 10 or the like may have a plurality of non-rotating units 180.
- the measurement apparatus 10 or the like may include a plurality of sets of coil units 184, a gradient magnetic field generation unit 188, and the like, which may be arranged at different positions with respect to the rotation axis AX and the like. Thereby, the measuring device 10 or the like can simultaneously measure a plurality of measurement objects 20 and can improve the measurement efficiency.
- the measuring device 10 or the like may include a plurality of magnets of each type in the rotating unit 110 or the like.
- the rotation unit 110 or the like may include a plurality of sets of a pair of ESR magnets and MRI magnets, or may include one of a plurality of ESR magnets and MRI magnets.
- the measuring apparatus 10 etc. can implement
- the rotation unit 110 or the like can adopt a structure in which a plurality of first magnets 112 and a plurality of second magnets 114 are alternately provided on a circumference centered on the rotation axis AX or the like.
- the control unit 230 can perform ESR induction and NMR measurement a plurality of times during one rotation.
- the control unit 230 causes the static magnetic field while at least two of the plurality of first magnets 112 are opposed to the measurement target 20 while the rotation unit 110 or the like rotates once.
- Magnetic fields having different strengths are generated from the adjustment coil, and the measurement target 20 is measured while at least two second magnets 114 following the at least two first magnets 112 are opposed to the measurement target 20. Thereby, the measuring device 10 can measure each of two or more compositions during one rotation of the rotating unit 110.
- the static magnetic field adjustment part 190 is used in order to change the intensity
- the control unit 230 stores a correction amount for each rotation angle of the rotation unit 110 and the like measured by a calibration operation or the like by manual measurement, and controls the static magnetic field adjustment unit 190 according to the correction amount.
- the measurement apparatus 10 may use the first magnet 112 not only for ESR induction but also for relaxation degree imaging using a difference in relaxation time due to a difference in magnetic field strength between a plurality of magnets.
- the measurement apparatus 10 first performs the MRI measurement in a state where the first magnetic field by the first magnet 112 having different magnetic field strengths is applied to the measurement target 20 and then the second magnetic field by the second magnet 114 is applied to the measurement target 20. Utilizing the fact that the relaxation time difference varies depending on the type of tissue in the living body, an image in which abnormalities such as cancer in the living body can be distinguished from other normal tissues is generated.
- the embodiment has been described in which the measuring device 10 and the like include the rotation shaft member 140 and the like that overlap the rotation axis AX, and the rotation unit 110 is collectively driven via the rotation shaft member 140.
- the measuring device 10 or the like when the measuring device 10 or the like does not include the rotating shaft member 140 or the like that overlaps the rotating shaft AX, the measuring device 10 or the like rotates the pair of rotating units 110a and 110b by using the roller 158 or the like instead of the rotating shaft member 140 or the like. May be driven individually to synchronize.
- the measurement device 10 and the like can secure a wider measurement space between the pair of rotation units 110a and 110b.
- FIG. 15 shows an example of a hardware configuration of a computer 1900 that functions as at least a part (mainly the control unit 230) of the measuring apparatus 10 or the like.
- a computer 1900 is connected to a CPU peripheral unit having a CPU 2000, a RAM 2020, a graphic controller 2075, and a display device 2080 that are connected to each other by a host controller 2082, and to the host controller 2082 by an input / output controller 2084.
- Input / output unit having communication interface 2030, hard disk drive 2040, and CD-ROM drive 2060, and legacy input / output unit having ROM 2010, flexible disk drive 2050, and input / output chip 2070 connected to input / output controller 2084 Is provided.
- the host controller 2082 connects the RAM 2020 to the CPU 2000 and the graphic controller 2075 that access the RAM 2020 at a high transfer rate.
- the CPU 2000 operates based on programs stored in the ROM 2010 and the RAM 2020 and controls each unit.
- the graphic controller 2075 acquires image data generated on a frame buffer provided in the RAM 2020 by the CPU 2000 or the like, and displays the image data on the display device 2080 via the display unit 240.
- the graphic controller 2075 may include a frame buffer for storing image data generated by the CPU 2000 or the like.
- the input / output controller 2084 connects the host controller 2082 to the communication interface 2030, the hard disk drive 2040, and the CD-ROM drive 2060, which are relatively high-speed input / output devices.
- the communication interface 2030 communicates with other devices via a network by wire or wireless.
- the communication interface functions as hardware for performing communication in the measuring device 10 or the like.
- the hard disk drive 2040 stores programs and data used by the CPU 2000 in the computer 1900.
- the CD-ROM drive 2060 reads a program or data from the CD-ROM 2095 and provides it to the hard disk drive 2040 via the RAM 2020.
- the ROM 2010, the flexible disk drive 2050, and the relatively low-speed input / output device of the input / output chip 2070 are connected to the input / output controller 2084.
- the ROM 2010 stores a boot program that the computer 1900 executes at startup and / or a program that depends on the hardware of the computer 1900.
- the flexible disk drive 2050 reads a program or data from the flexible disk 2090 and provides it to the hard disk drive 2040 via the RAM 2020.
- the input / output chip 2070 connects the flexible disk drive 2050 to the input / output controller 2084 and inputs / outputs various input / output devices via, for example, a parallel port, a serial port, a keyboard port, a mouse port, and the like. Connect to controller 2084.
- the program provided to the hard disk drive 2040 via the RAM 2020 is stored in a recording medium such as the flexible disk 2090, the CD-ROM 2095, or an IC card and provided by the user.
- the program is read from the recording medium, installed in the hard disk drive 2040 in the computer 1900 via the RAM 2020, and executed by the CPU 2000.
- the program for the measurement device 10 and the like includes a measurement module, an input module, a control module, and a display module.
- These programs or modules may work on the CPU 2000 or the like to cause the computer 1900 to function as at least part of the measurement unit 200, the input unit 220, the control unit 230, and the display unit 240, respectively.
- the information processing described in these programs is read into the computer 1900, whereby the measurement unit 200, the input unit 220, and the control unit, which are specific means in which the software and the various hardware resources described above cooperate. It functions as at least part of the unit 230 and the display unit 240.
- the CPU 2000 executes a communication program loaded on the RAM 2020 and executes a communication interface based on the processing content described in the communication program.
- a communication process is instructed to 2030.
- the communication interface 2030 reads transmission data stored in a transmission buffer area or the like provided on a storage device such as the RAM 2020, the hard disk drive 2040, the flexible disk 2090, or the CD-ROM 2095, and sends it to the network.
- the reception data transmitted or received from the network is written into a reception buffer area or the like provided on the storage device.
- the communication interface 2030 may transfer transmission / reception data to / from the storage device by the DMA (Direct Memory Access) method. Instead, the CPU 2000 transfers the storage device or the communication interface 2030 as the transfer source.
- the transmission / reception data may be transferred by reading the data from the data and writing the data to the communication interface 2030 or the storage device of the transfer destination.
- the CPU 2000 is all or necessary from among files or databases stored in an external storage device such as a hard disk drive 2040, a CD-ROM drive 2060 (CD-ROM 2095), and a flexible disk drive 2050 (flexible disk 2090). This portion is read into the RAM 2020 by DMA transfer or the like, and various processes are performed on the data on the RAM 2020.
- an external storage device such as a hard disk drive 2040, a CD-ROM drive 2060 (CD-ROM 2095), and a flexible disk drive 2050 (flexible disk 2090).
- This portion is read into the RAM 2020 by DMA transfer or the like, and various processes are performed on the data on the RAM 2020.
- the CPU 2000 writes the processed data back to the external storage device by DMA transfer or the like.
- the RAM 2020 can be regarded as temporarily holding the contents of the external storage device, in the present embodiment, the RAM 2020 and the external storage device are collectively referred to as a memory, a storage unit, or a storage device.
- the CPU 2000 can also store a part of the RAM 2020 in the cache memory and perform reading and writing on the cache memory. Even in such a form, the cache memory bears a part of the function of the RAM 2020. Therefore, in the present embodiment, the cache memory is also included in the RAM 2020, the memory, and / or the storage device unless otherwise indicated. To do.
- the CPU 2000 performs various operations, such as various operations, information processing, condition determination, information search / replacement, etc., described in the present embodiment, specified for the data read from the RAM 2020 by the instruction sequence of the program. Is written back to the RAM 2020.
- the CPU 2000 determines whether or not the various variables shown in the present embodiment satisfy the conditions such as large, small, above, below, equal, etc., compared to other variables or constants. If the condition is satisfied (or not satisfied), the program branches to a different instruction sequence or calls a subroutine.
- the CPU 2000 can search for information stored in a file or database in the storage device. For example, in the case where a plurality of entries in which the attribute value of the second attribute is associated with the attribute value of the first attribute are stored in the storage device, the CPU 2000 displays the plurality of entries stored in the storage device. The entry that matches the condition in which the attribute value of the first attribute is specified is retrieved, and the attribute value of the second attribute that is stored in the entry is read, thereby associating with the first attribute that satisfies the predetermined condition The attribute value of the specified second attribute can be obtained.
- the programs or modules shown above may be stored in an external recording medium.
- an optical recording medium such as DVD or CD
- a magneto-optical recording medium such as MO
- a tape medium such as an IC card, and the like
- a storage device such as a hard disk or a RAM provided in a server system connected to a dedicated communication network or the Internet may be used as a recording medium, and the program may be provided to the computer 1900 via the network.
- 10 measurement device 10 measurement object, 30 measurement device, 100 rotation module, 101a-b jacket, 102a-b first back yoke, 103a-b first magnet yoke part, 104a-b second back yoke, 105a-b second 2-magnet yoke part, 106 locking part, 107b first opening, 108b second opening, 109b third opening, 110a-b rotating unit, 111a-b first range, 112a-b first magnet, 113a-b second Range, 114a-b 2nd magnet, 115a-b 1st pole piece, 116a-b 2nd pole piece, 117a-b support plate, 118a-b support column, 140 rotating shaft member, 142a-b bearing part, 146 housing 147 outer cover, 148 upper frame, 150 struts, 152 base, 56 target protection unit, 158 roller, 160 power transmission unit, 170 drive unit, 180 non-rotation unit, 183 opening, 184 coil unit, 188 gradient magnetic field generation unit, 190
Abstract
Description
[特許文献1]特開2006-204551号公報
[特許文献2]特表2011-527222号公報
[特許文献3]特開2007-316008号公報
[特許文献4]国際公開第2014/196525号
[特許文献5]特開2010-227247号公報
[特許文献6]国際公開第2014/007124号 Also, a rotary MRI apparatus is known that rotates a magnet that forms a static magnetic field for MRI and a magnet that forms a static magnetic field for ESR with respect to a stationary subject to generate an MRI image of the subject. (For example, Patent Documents 4 to 6).
[Patent Document 1] JP 2006-204551 [Patent Document 2] JP 2011-527222 [Patent Document 3] JP 2007-316008 [Patent Document 4] International Publication No. 2014/196525 [Patent Document 3] Document 5] Japanese Patent Application Laid-Open No. 2010-227247 [Patent Document 6] International Publication No. 2014/007124
Claims (15)
- 回転軸に対して軸方向の異なる位置に設けられ、回転軸中心に回転する一対の回転ユニットと、
前記一対の回転ユニットの間の空間に設けられ、計測対象を設置するための非回転ユニットと、
を備え、
前記一対の回転ユニットの少なくとも一方は、
当該回転ユニットにおける、前記回転軸を中心とする円周上の第1範囲に収容され、前記一対の回転ユニットの間の空間に第1磁場を発生させる第1磁石と、
当該回転ユニットにおける、前記回転軸を中心とする円周上の前記第1範囲とは異なる第2範囲に収容され、前記一対の回転ユニットの間の空間に第2磁場を発生させる第2磁石と、
を有する計測装置。 A pair of rotating units provided at different positions in the axial direction with respect to the rotating shaft, and rotating about the rotating shaft;
A non-rotating unit that is provided in a space between the pair of rotating units and for installing a measurement object;
With
At least one of the pair of rotation units is
A first magnet that is accommodated in a first range on a circumference around the rotation axis in the rotation unit and that generates a first magnetic field in a space between the pair of rotation units;
A second magnet accommodated in a second range different from the first range on the circumference around the rotation axis in the rotation unit, and generating a second magnetic field in a space between the pair of rotation units; ,
Measuring device. - 前記一対の回転ユニットのそれぞれは、前記第1磁石および前記第2磁石を収容して固定するジャケットを有する、
請求項1に記載の計測装置。 Each of the pair of rotating units has a jacket for receiving and fixing the first magnet and the second magnet.
The measuring device according to claim 1. - 前記ジャケットは、前記第1磁石を収容する第1開口および前記第2磁石を収容する第2開口を有する請求項2に記載の計測装置。 3. The measuring device according to claim 2, wherein the jacket has a first opening for accommodating the first magnet and a second opening for accommodating the second magnet.
- 前記ジャケットは、
前記第1開口および前記第2開口内に、前記第1磁石および前記第2磁石を係止して前記第1磁石および前記第2磁石が前記計測対象側へと抜け出るのを防止する係止部を含む、
請求項3に記載の計測装置。 The jacket is
A locking portion that locks the first magnet and the second magnet in the first opening and the second opening to prevent the first magnet and the second magnet from coming out to the measurement target side. including,
The measuring device according to claim 3. - 前記係止部は、前記ジャケットと一体に形成される請求項4に記載の計測装置。 The measuring device according to claim 4, wherein the locking portion is formed integrally with the jacket.
- 前記一対の回転ユニットのそれぞれは、円盤状である請求項5に記載の計測装置。 The measuring device according to claim 5, wherein each of the pair of rotating units has a disk shape.
- 前記一対の回転ユニットは、前記回転軸を構成する回転軸部材に固定され、
前記回転軸部材を、前記一対の回転ユニットの外側の両側で支える軸受部を更に備える請求項1から6のいずれか一項に記載の計測装置。 The pair of rotation units are fixed to a rotation shaft member constituting the rotation shaft,
The measuring device according to any one of claims 1 to 6, further comprising bearing portions that support the rotating shaft member on both sides outside the pair of rotating units. - 当該計測装置を収容する筐体のフレームから前記一対の回転ユニットの間の空間へと延伸し、前記一対の回転ユニットが前記回転軸部材から外れた場合においても前記計測対象を保護する対象保護部を更に備える請求項7に記載の計測装置。 An object protection unit that extends from a frame of a housing that houses the measurement device to a space between the pair of rotation units, and protects the measurement object even when the pair of rotation units is detached from the rotation shaft member. The measuring device according to claim 7, further comprising:
- 当該計測装置の異常を検出する異常検出部と、
前記異常検出部が異常を検出したことに応じて、前記一対の回転ユニットの回転を停止し、または前記一対の回転ユニットの回転速度を低下させる制御部と、
を更に備える請求項1から8のいずれか1項に記載の計測装置。 An anomaly detector that detects an anomaly of the measurement device;
A controller that stops the rotation of the pair of rotating units or reduces the rotational speed of the pair of rotating units in response to the abnormality detecting unit detecting an abnormality;
The measuring device according to claim 1, further comprising: - 前記回転軸は、略水平方向に設けられる請求項1から9のいずれか一項に記載の計測装置。 The measuring device according to any one of claims 1 to 9, wherein the rotation shaft is provided in a substantially horizontal direction.
- 前記非回転ユニットは、前記回転軸よりも上側または前記回転軸の横側に設けられる請求項10に記載の計測装置。 The measuring device according to claim 10, wherein the non-rotating unit is provided above the rotating shaft or on a lateral side of the rotating shaft.
- 前記一対の回転ユニットおよび前記非回転ユニットを覆う、前記計測対象を前記非回転ユニットへと導くための開口が設けられた筐体を備える請求項1から11のいずれか一項に記載の計測装置。 12. The measuring apparatus according to claim 1, further comprising a housing that covers the pair of rotating units and the non-rotating unit and is provided with an opening for guiding the measurement target to the non-rotating unit. .
- 前記非回転ユニットは、前記計測対象に対して傾斜磁場を与える傾斜磁場発生部を更に有する請求項1から12のいずれか一項に記載の計測装置。 The measurement device according to any one of claims 1 to 12, wherein the non-rotating unit further includes a gradient magnetic field generation unit that applies a gradient magnetic field to the measurement target.
- 前記非回転ユニットは、前記第1磁石および前記第2磁石が前記計測対象に対して与える前記第1磁場および前記第2磁場の少なくとも一方の静磁場の強度を変えるための静磁場調整用コイルを更に有する請求項1から13のいずれか一項に記載の計測装置。 The non-rotating unit includes a static magnetic field adjusting coil for changing the strength of at least one of the first magnetic field and the second magnetic field that the first magnet and the second magnet give to the measurement target. The measuring device according to any one of claims 1 to 13, further comprising:
- 前記一対の回転ユニットを前記回転軸を中心に回転させる駆動部と、
前記駆動部を制御する制御部と、
を更に備え、
前記制御部は、当該計測装置を停止させる場合に、前記駆動部を制御して、前記第2磁石を予め設定された位置へと移動させる
請求項1から14のいずれか一項に記載の計測装置。 A drive unit that rotates the pair of rotation units around the rotation axis;
A control unit for controlling the driving unit;
Further comprising
The measurement according to any one of claims 1 to 14, wherein when the measurement device is stopped, the control unit controls the drive unit to move the second magnet to a preset position. apparatus.
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE112016000211.4T DE112016000211T5 (en) | 2015-04-28 | 2016-04-01 | measurement device |
| JP2017515452A JPWO2016174993A1 (en) | 2015-04-28 | 2016-04-01 | Measuring device |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2015-091643 | 2015-04-28 | ||
| JP2015091643 | 2015-04-28 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2016174993A1 true WO2016174993A1 (en) | 2016-11-03 |
Family
ID=57198356
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2016/060901 WO2016174993A1 (en) | 2015-04-28 | 2016-04-01 | Measurement device |
Country Status (3)
| Country | Link |
|---|---|
| JP (1) | JPWO2016174993A1 (en) |
| DE (1) | DE112016000211T5 (en) |
| WO (1) | WO2016174993A1 (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2018117185A1 (en) * | 2016-12-21 | 2018-06-28 | 英雄 内海 | Magnetic field imparting device |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07327958A (en) * | 1994-06-09 | 1995-12-19 | Hitachi Medical Corp | Magnetic resonance imaging apparatus |
| JP2000116640A (en) * | 1998-10-16 | 2000-04-25 | Toshiba Corp | X-ray ct instrument |
| WO2004069052A1 (en) * | 2003-02-10 | 2004-08-19 | Neomax Co., Ltd. | Magnetic field-producing device |
| JP2007519451A (en) * | 2004-02-02 | 2007-07-19 | エサオテ エス.ピー.エイ. | Magnetic resonance imaging system |
| JP2008259876A (en) * | 2008-07-07 | 2008-10-30 | Hitachi Metals Ltd | Magnetic field generator for mri |
-
2016
- 2016-04-01 JP JP2017515452A patent/JPWO2016174993A1/en active Pending
- 2016-04-01 WO PCT/JP2016/060901 patent/WO2016174993A1/en active Application Filing
- 2016-04-01 DE DE112016000211.4T patent/DE112016000211T5/en not_active Withdrawn
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH07327958A (en) * | 1994-06-09 | 1995-12-19 | Hitachi Medical Corp | Magnetic resonance imaging apparatus |
| JP2000116640A (en) * | 1998-10-16 | 2000-04-25 | Toshiba Corp | X-ray ct instrument |
| WO2004069052A1 (en) * | 2003-02-10 | 2004-08-19 | Neomax Co., Ltd. | Magnetic field-producing device |
| JP2007519451A (en) * | 2004-02-02 | 2007-07-19 | エサオテ エス.ピー.エイ. | Magnetic resonance imaging system |
| JP2008259876A (en) * | 2008-07-07 | 2008-10-30 | Hitachi Metals Ltd | Magnetic field generator for mri |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2018117185A1 (en) * | 2016-12-21 | 2018-06-28 | 英雄 内海 | Magnetic field imparting device |
Also Published As
| Publication number | Publication date |
|---|---|
| JPWO2016174993A1 (en) | 2018-02-22 |
| DE112016000211T5 (en) | 2017-08-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US10078119B2 (en) | Rotating magnetic field hall measurement system | |
| Kimman et al. | A miniature milling spindle with active magnetic bearings | |
| JP5574386B2 (en) | Measuring device and measuring method | |
| CN103767725B (en) | A kind of method and apparatus for balancing CT frame | |
| US9678040B2 (en) | Rotating magnetic field hall measurement system | |
| WO2016203672A1 (en) | Residual-stress measurement device and residual-stress measurement method | |
| JP2005211654A (en) | Method of compensating unbalance | |
| JP2004297978A (en) | Single shaft driver and surface shape measuring apparatus using it | |
| JP2005211660A (en) | Image forming tomography apparatus | |
| JP2011075472A (en) | Method and device for accurately adjusting magic angle in nmr | |
| WO2016174993A1 (en) | Measurement device | |
| WO2016174996A1 (en) | Measurement device and measurement method | |
| CN109900475A (en) | Bearing check device | |
| KR20120085109A (en) | Dynamic characteristics measuring apparatus of bearing, dynamic characteristics analysing system and dynamic characteristics analysing method of bearing | |
| US20170170703A1 (en) | Rotor alignment for reducing vibrations and noise | |
| CN102809464A (en) | Dynamic balance measurement method and device and CT (computed tomography) apparatus with dynamic balance measurement device | |
| RU2014151783A (en) | X-RAY BALANCE | |
| JP2008272900A (en) | Oscillation state measuring method at machining stage of work and/or tool | |
| Friedman et al. | Synchrotron radiation Mössbauer spectra of a rotating absorber with implications for testing velocity and acceleration time dilation | |
| CN107219133B (en) | A kind of horizontal type test device and test method measuring material twisting property under Electronic Speculum | |
| CN209131898U (en) | X-ray tube test device | |
| JP3126259U (en) | measuring device | |
| JPH08136698A (en) | Arc slider driving type goniometer and solid angle diffraction meter | |
| JP2005189200A (en) | Magnetic vector measuring instrument | |
| Friedman et al. | The validity of an experiment testing the influence of acceleration on time dilation using a rotating Mössbauer absorber and a Synchrotron Mössbauer Source |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 16786270 Country of ref document: EP Kind code of ref document: A1 |
|
| ENP | Entry into the national phase |
Ref document number: 2017515452 Country of ref document: JP Kind code of ref document: A |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 112016000211 Country of ref document: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 16786270 Country of ref document: EP Kind code of ref document: A1 |