WO2016103664A1 - Position estimating device - Google Patents
Position estimating device Download PDFInfo
- Publication number
- WO2016103664A1 WO2016103664A1 PCT/JP2015/006303 JP2015006303W WO2016103664A1 WO 2016103664 A1 WO2016103664 A1 WO 2016103664A1 JP 2015006303 W JP2015006303 W JP 2015006303W WO 2016103664 A1 WO2016103664 A1 WO 2016103664A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- detection
- portable device
- signal
- position estimation
- intensity
- Prior art date
Links
Images







Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B60—VEHICLES IN GENERAL
- B60R—VEHICLES, VEHICLE FITTINGS, OR VEHICLE PARTS, NOT OTHERWISE PROVIDED FOR
- B60R25/00—Fittings or systems for preventing or indicating unauthorised use or theft of vehicles
- B60R25/20—Means to switch the anti-theft system on or off
- B60R25/24—Means to switch the anti-theft system on or off using electronic identifiers containing a code not memorised by the user
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01S—RADIO DIRECTION-FINDING; RADIO NAVIGATION; DETERMINING DISTANCE OR VELOCITY BY USE OF RADIO WAVES; LOCATING OR PRESENCE-DETECTING BY USE OF THE REFLECTION OR RERADIATION OF RADIO WAVES; ANALOGOUS ARRANGEMENTS USING OTHER WAVES
- G01S5/00—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations
- G01S5/02—Position-fixing by co-ordinating two or more direction or position line determinations; Position-fixing by co-ordinating two or more distance determinations using radio waves
- G01S5/0269—Inferred or constrained positioning, e.g. employing knowledge of the physical or electromagnetic environment, state of motion or other contextual information to infer or constrain a position
-
- E—FIXED CONSTRUCTIONS
- E05—LOCKS; KEYS; WINDOW OR DOOR FITTINGS; SAFES
- E05B—LOCKS; ACCESSORIES THEREFOR; HANDCUFFS
- E05B49/00—Electric permutation locks; Circuits therefor ; Mechanical aspects of electronic locks; Mechanical keys therefor
Definitions
- the present disclosure relates to a position estimation device that estimates the position of a portable device that is mounted on a vehicle and carried by a user.
- a technique for controlling a vehicle such as locking and unlocking a vehicle door and starting an engine using a portable device that is carried by a vehicle user and communicates as an electronic key registered in advance in the vehicle is known.
- a technique for estimating the position of the portable device with respect to the vehicle is important.
- Patent Document 1 in order to estimate in which of the predetermined areas inside and outside the vehicle such a mobile device is located, a detection antenna is installed in the vehicle according to the number of areas and the detection is performed. When a detection signal of a different format is transmitted for each antenna and the detection signal received by the portable device can be identified from which detection antenna, the transmission area of the identified detection antenna is carried. A technique for estimating the position of the apparatus is disclosed.
- This disclosure is intended to provide a position estimation device that can accurately estimate a position with a simple configuration.
- a position estimation device that detects the position of a mobile device that is mounted on a vehicle and carried by a user includes a plurality of detection antennas, a transmission unit, and a position estimation unit.
- the plurality of detection antennas have a predetermined communication range, and are provided at different installation positions in the vehicle.
- the transmission unit selects detection antennas one by one in accordance with a predetermined basic order so that transmission time zones do not overlap, and transmits a detection wave having a predetermined intensity via the selected detection antenna.
- the estimation unit sets the detection wave transmitted by the transmission unit as the detection wave group, sets the detection wave group received by the portable device as the reception wave group, and determines the reception intensity of the detection wave for each detection antenna selected in the reception wave group. Using the received signal as an intensity pattern signal, the position of the portable device is estimated based on the reception intensity of each detection antenna in the intensity pattern signal.
- the reception intensity of the detection wave by the portable device is when the distance of the portable device is short or far from the detection antenna to which the detection wave is transmitted. It will be bigger than.
- the range that the portable device can take for each detection antenna is specified based on the magnitude relationship of the received intensity of the detection wave for each detection antenna indicated by the intensity pattern signal, and the position of the portable device is estimated Is done.
- the position of the portable device is estimated based on the magnitude relationship of the reception strengths of the detection waves received by the portable device, it is necessary to increase the number of detection antennas according to the number of regions whose positions are to be detected. It is possible to accurately estimate the position of the portable device with a smaller number of detection antennas than a certain prior art, that is, with a simple configuration.
- FIG. 1 The block diagram which shows the structure of the smart entry system provided with the vehicle equipment and the portable device.
- the flowchart which shows an example of the position estimation process which the control part of a vehicle equipment performs.
- the float which shows an example of the receiving intensity signal transmission process which the portable device control part of a portable device performs.
- (A) is a figure which shows the installation position of an antenna about a 1st operation example
- (b) is a figure which shows the transmission timing of a detection wave
- (c) is a figure explaining an intensity
- (A) is a figure which shows the installation position of an antenna about a 2nd operation example
- (b) is a figure which shows the transmission timing of a detection wave
- (c) is a figure explaining an intensity
- (A) is a figure which shows the installation position of an antenna about a 3rd operation example
- (b) is a figure which shows the transmission timing of a detection wave
- (c) is a figure explaining an intensity
- (A) is a figure which shows the installation position of an antenna about a 4th operation example
- (b) is a figure which shows the transmission timing of a detection wave
- (c) is a figure explaining an intensity
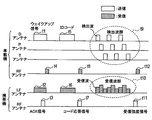
- FIG. 1 is a block diagram illustrating a configuration of a smart entry system 1 that is an embodiment to which the present disclosure is applied.
- the smart entry system 1 includes an in-vehicle device 2 mounted on a vehicle and a portable device 3 that can be carried by a user of the vehicle.
- the smart entry system 1 uses the portable device 3 as an electronic key registered in advance in the vehicle, and performs communication between the portable device 3 and the in-vehicle device 2 to lock and unlock the vehicle door and start the engine. It is a system which controls vehicles, such as.
- the portable device 3 functions as an electronic key for performing at least one of locking and unlocking of a vehicle door and engine starting operation, and is a wireless communication device that transmits and receives data to and from the in-vehicle device 2. is there.
- the portable device 3 includes an LF reception unit 31, an RF transmission unit 32, and a portable device control unit 33.
- the LF receiving unit 31 receives a transmission wave of a predetermined first frequency (for example, LF band (about 100 KHz)) transmitted from the in-vehicle device 2 via a reception antenna (not shown), and from the in-vehicle device 2.
- the transmitted transmission data is demodulated.
- the RF transmission unit 32 modulates a transmission carrier wave of a predetermined second frequency (for example, UHF band (300 to 400 MHz band)) using response data from the portable device control unit 33.
- a transmission signal to the in-vehicle device 2 is generated and transmitted from a transmission antenna (not shown).
- the portable device control unit 33 is an electronic device including a microcomputer having a CPU 331, a ROM 332, a RAM 333, and the like.
- ROM 332 an ID code for causing the portable device 3 to function as an electronic key registered in advance in the vehicle-mounted device 2 of the vehicle is recorded.
- an electronic key registered in advance in the vehicle-mounted device 2 of the vehicle is referred to as a registration key.
- the CPU 331 executes various processes for realizing the functions of the portable device 3 according to the program recorded in the ROM 332.
- the portable device control unit 33 controls the power supply circuit (not shown), so that the RF transmission unit 32 in a state where the power is not supplied (sleep state) is in a state where the power is supplied (wakeup state). To migrate. In addition, the RF transmitter 32 in the wake-up state is shifted to the sleep state.
- the CPU 331 when the CPU 331 receives the detection wave group transmitted from the in-vehicle device 2 according to the program recorded in the ROM 332, the CPU 331 causes the in-vehicle device 2 to estimate the position of the portable device 3 based on the reception intensity of the detection wave group. Reception intensity signal transmission processing for transmitting a reception intensity signal for the purpose is executed.
- the in-vehicle device 2 includes an LF communication unit 11, an RF communication unit 12, a sensor unit 13, a control target unit 14, and a control unit 15.
- the LF communication unit 11 includes an LF transmission unit 111, a driver seat transmission antenna 112, a passenger seat antenna 113, and a trunk transmission antenna 114.
- the driver seat transmission antenna is referred to as the D seat antenna 112
- the passenger seat antenna 113 is referred to as the P seat antenna 113
- the trunk transmission antenna 114 is referred to as the T antenna 114.
- the D seat antenna 112, the P seat antenna 113, and the T antenna 114 are described as transmitting antennas 112 to 114.
- the driver's seat transmission antenna 112 is indicated as D antenna
- the passenger's seat antenna 113 is indicated as P antenna
- the trunk transmission antenna 114 is indicated as T antenna.
- an RF receiving antenna 122 to be described later is indicated as an RF antenna in the drawing.
- the LF transmission unit 111 generates a transmission signal to the portable device 3 by modulating the transmission carrier wave of the first frequency that is the LF band using the transmission data output from the control unit 15, and the generated transmission A signal is transmitted as a transmission wave from each of the transmission antennas 112 to 114.
- the D seat antenna 112 is provided on the vehicle interior side of the vehicle door on the driver seat side
- the P seat antenna 113 is provided on the vehicle interior side of the vehicle door on the passenger seat side.
- the T antenna 114 is provided outside the trunk room of the trunk room door.
- Each transmission antenna 112 to 114 has a communication range of a predetermined range both inside and outside the vehicle with these doors as the center.
- the LF transmitter 111 transmits the transmission wave so that the transmission intensities from the transmission antennas 112 to 114 are equal. Further, the LF transmission unit 111 includes a switch (not shown), and selects one of the transmission antennas 112 to 114 as an antenna for transmitting a transmission wave according to the switch instruction from the control unit 15 by the switch. Is possible. Hereinafter, the antenna selected according to the switching instruction is referred to as a selected antenna. A transmission wave based on the transmission data output from the control unit 15 is transmitted only from the selected antenna. That is, no transmission wave is output from any of the transmission antennas 112 to 114 other than the selected antenna.
- the RF communication unit 12 is installed, for example, in a room mirror in front of the driver's seat.
- the installation position of the RF communication unit 12 is not limited to this, and may be provided in a pillar, a trunk room, or the like.
- the RF communication unit 12 includes an RF reception unit 121 and an RF reception antenna 122.
- the RF reception unit 121 receives a transmission wave of the second frequency transmitted from the portable device 3 via the RF reception antenna 122, and the RF reception unit 121 receives the reception signal received via the RF reception antenna 122. Data for response from the portable device 3 is demodulated and input to the control unit 15.
- the sensor unit 13 includes a lock sensor 131 and an unlock sensor 132.
- the lock sensor 131 is a touch sensor provided in the vicinity of the door handle of the vehicle door on the driver's seat side, detects contact of the part of the user's human body with the lock sensor 131, and outputs a detection signal to the control unit 15. .
- a user here means the passenger
- the unlock sensor 132 is a touch sensor provided on the door handle of the vehicle door on the driver's seat side, detects contact with the unlock sensor 132 by a part of the user's human body, and outputs a detection signal to the control unit 15. To do.
- the control target unit 14 includes, for example, a door opening / closing mechanism that opens and closes a vehicle door on the driver's seat side, a door locking / unlocking mechanism that locks and unlocks the vehicle door, and a trunk room door locking / unlocking that locks and unlocks the trunk room door. At least a mechanism and a speaker for performing voice notification are provided.
- the control unit 15 is an electronic control device including a microcomputer having a CPU 51, a ROM 52, a RAM 53, and the like.
- the ROM 52 of the control unit 15 stores an ID code of a registration key and various basic pattern signals described later.
- Various programs are recorded in the ROM 52, and the control unit 15 (CPU 51) executes processing for performing various controls based on communication with the portable device 3 in accordance with the programs recorded in the ROM 52.
- the control unit 15 receives the detection signal from the lock sensor 131 and locks the vehicle door by the locking / unlocking mechanism.
- the detection signal is received from the unlock sensor 22, the vehicle door is unlocked by the door locking / unlocking mechanism.
- control unit 15 transmits a detection wave (detection wave group) to the portable device 3, and a reception intensity signal generated by the portable device 3 based on the reception result of the detection wave group. , And a position estimation process for estimating the position of the portable device 3 based on the received intensity signal is executed.
- the position estimation process is a process that is repeatedly executed while the vehicle is stopped, for example.
- the previous intensity pattern signal described later is overwritten in the RAM 53 every time the position estimation process is repeatedly executed.
- the control part 15 (CPU51) is made into a subject in the sentence.
- a wakeup signal for shifting the portable device 3 to the wakeup state is transmitted using the first frequency. Specifically, a switching instruction for selecting the D-seat antenna 112 is transmitted to the LF transmission unit 111 and transmission data including a wake-up signal is output to the LF transmission unit 111.
- subsequent S115 it is determined whether or not the ACK signal, which is a response signal from the portable device 3 to the wake-up signal transmitted in S110, is received by the RF reception unit 121 via the RF reception antenna 122 at the second frequency. To do. If the ACK signal is not received, the process proceeds to S110, and the wakeup signal is repeatedly transmitted until the ACK signal is received. If an ACK signal is received, the process proceeds to S120.
- the ID code is transmitted using the first frequency. Specifically, a switching instruction for selecting the D-seat antenna 112 is transmitted to the LF transmission unit 111, and transmission data including an ID code as a registration key recorded in the ROM 52 is output to the LF transmission unit 111.
- the RF receiver 121 determines whether or not the RF receiver 121 has received a code response signal, which is a response signal from the portable device 3 to the ID code transmitted in S120, at the second frequency. If no code response signal is received, the process waits until a code response signal is received. If a code response signal is received, the process proceeds to S130.
- a code response signal which is a response signal from the portable device 3 to the ID code transmitted in S120, at the second frequency. If no code response signal is received, the process waits until a code response signal is received. If a code response signal is received, the process proceeds to S130.
- S130 it is determined whether or not the code response signal received in S125 is a coincidence signal.
- the coincidence signal is received from the portable device 3 when the ID code transmitted in S120 matches the ID code registered in advance in the portable device 3, that is, when the portable device 3 is the registration key of the in-vehicle device 2. A signal to be transmitted. If the coincidence signal has not been received, the process proceeds to S110. If the coincidence signal has been received, the process proceeds to S135.
- detection waves are transmitted from the respective transmission antennas 112 to 114.
- a switching instruction for switching the transmission antennas 112 to 114 is output to the LF transmission unit 111 for each selection period.
- transmission data is output to the LF transmission unit 111 during an antenna transmission period that is predetermined to be equal to or shorter than the antenna selection period.
- the antenna selection period and the antenna transmission period are set equal.
- the transmission data output to the LF transmission unit 111 during the antenna transmission period is not particularly defined, but is a signal that changes as determined in advance, such as a signal in which logical values 0 and 1 are alternately repeated. Alternatively, it may be a signal whose logic value changes at random.
- a procedure for transmitting detection waves according to a basic order is used as a basic procedure, and this basic procedure is repeated three times to transmit detection waves. That is, the detection wave is repeatedly transmitted from each transmission antenna three times.
- detection waves that are repeatedly transmitted by switching the transmission antennas 112 to 114 in accordance with the basic order in this manner are referred to as a detection wave group.
- a period indicated by the product of the antenna selection period, the number of transmission antennas, and the number of switching times is referred to as a detection transmission period.
- the RF receiving unit 121 determines whether or not the RF receiving unit 121 has received a reception intensity signal that is a response signal from the portable device 3 to the detected wave group transmitted in S135 at the second frequency. If the reception intensity signal has not been received, the process waits until it is received. If the reception intensity signal has been received, the process proceeds to S145.
- the detection wave and the detection wave group received by the portable device 3 are referred to as a reception wave and a reception wave group, respectively.
- the received intensity signal is a data string that indicates the value of the received intensity in the received wave group over time.
- an intensity pattern signal is generated based on the received intensity signal.
- the intensity pattern signal is a data string indicating the reception intensity of the detection wave transmitted from each of the selected transmission antennas 112 to 114 in the reception wave group by the portable device 3.
- the received intensity signal may be sampled every antenna selection period to generate an intensity pattern signal. Note that the sampling period is not limited to this.
- the position of the portable device 3 is estimated. Specifically, for example, based on the reception intensity of the received wave for each of the selected transmission antennas 112 to 114 in the intensity pattern signal, the position that the portable device 3 can take with respect to each transmission antenna 112 to 114 is specified. The position of the portable device 3 is estimated. Further, for example, the intensity pattern signal when the portable device 3 is located at a predetermined basic position in the communication range of the transmission antennas 112 to 114 is recorded in the ROM 52 in advance as a basic pattern signal, and the intensity pattern signal and the basic pattern are recorded. Based on the comparison with the signal, when the intensity pattern signal matches the basic pattern signal, the basic position is set as the estimated position of the portable device 3. In the present embodiment, the position of the portable device 3 is estimated by any one of these methods according to the acquired intensity pattern signal.
- reception intensity signal transmission processing executed by the portable device control unit 33 (CPU 331) of the portable device 3 will be described with reference to FIG.
- the reception strength signal transmission process is a process that is repeatedly executed while power is supplied to the portable device 3, for example.
- the portable machine control part 33 (CPU331) is made into a subject in the sentence.
- S210 it is determined whether or not the LF receiver 31 has received the wakeup signal at the first frequency. Specifically, when the data demodulated by the LF receiver 31 includes a wakeup signal, it is determined that the wakeup signal has been received. If the wake-up signal is not received, the process waits until the wake-up signal is received. If the wake-up signal is received, the process proceeds to S215.
- an ACK signal indicating that the portable device 3 has shifted to the wake-up state is transmitted.
- the response data including the ACK signal is transmitted by the RF transmission unit 32 using the second frequency.
- S225 it is determined whether or not the LF receiver 31 has received the ID code at the first frequency. Specifically, when the data demodulated by the LF receiver 31 includes an ID code, it is determined that the ID code has been received. If no ID code is received, the process waits until an ID code is received. If an ID code is received, the process proceeds to S230.
- S230 it is determined whether or not the portable device 3 is a registration key of the vehicle (onboard device 2) that is the transmission source of the ID code. Specifically, when the ID code received in S225 matches the ID code registered in the ROM 332 in advance, it is determined that the portable device 3 is a registration key. If it is not a registration key, the process proceeds to S235, and if it is a registration key, the process proceeds to S240.
- the RF transmission unit 32 transmits a mismatch signal indicating that the portable device 3 is not the registration key of the in-vehicle device 2 using the second frequency. Then, the supply of power to the RF transmission unit 32 is stopped, the portable device 3 is set in the sleep state, and the process proceeds to S210.
- the coincidence signal indicating that the portable device 3 is the registration key of the in-vehicle device 2 is transmitted by the RF transmission unit 32 using the second frequency.
- the detection wave group is set so that transmission from the in-vehicle device 2 is completed during a predetermined detection transmission period.
- the detection wave group is received from the in-vehicle device 2. Judge that completed.
- a reception intensity signal is generated.
- the reception intensity signal is a data string that is arranged in order according to the reception time of the reception intensity of the detected wave group received from the in-vehicle device 2.
- the received intensity signal is a data string that shows changes in received intensity in the received wave group in time series.
- the reception intensity signal generated in S260 is transmitted from the RF transmission unit 32 using the second frequency, the process proceeds to S210, and a series of processes is repeated.
- the smart entry system 1 sequentially executes processing by the in-vehicle device 2 (the control unit 15) and the portable device 3 (the portable device control unit 33).
- the in-vehicle device 2 transmits a wake-up signal (time t1).
- the portable device 3 receives the wakeup signal at time t2 (time t2)
- the portable device 3 transmits an ACK signal after shifting to the wakeup state (time t3).
- the in-vehicle device 2 transmits an ID code (time t5).
- the portable device 3 transmits a coincidence signal as a code response signal when the transmitted ID code is equal to the ID code recorded in advance (t7).
- the in-vehicle device 2 receives the coincidence signal as a code response signal (t8), it transmits a detection wave group (t9).
- the portable device 3 receives the detection wave group and transmits a reception intensity signal generated based on the reception wave group (t10) (t11).
- the in-vehicle device 2 receives the reception intensity signal from the portable device 3 (t12), and estimates the position of the portable device 3 based on the reception intensity signal.
- the vehicle equipment 2 performs the output according to the estimated position with respect to the control object part 14.
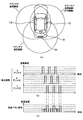
- FIG. 5A is a diagram illustrating an example in which the portable device 3 is located at the first position 91 (P1) close to the T antenna 114, and FIG. It is a figure which shows the detection wave group to do.
- FIG. 5C shows an intensity pattern signal generated based on the received intensity signal transmitted from the portable device 3 that has received the detection wave group shown in FIG. It is the figure (henceforth an intensity
- the control unit 15 sets the position of the portable device 3 near the T antenna 114, specifically, Presumed to be near the trunk room.
- FIG. 6A shown as an example, the vehicle door on the driver's seat side is a slide door, and the position of the D seat antenna 112 is changed from an open state position 112a to a closed state position 112b according to the open / closed state of the slide door.
- a second position 92 (P2) indicates a position near the slide door outside the passenger compartment
- a third position 93 (P3) indicates a position in the passenger compartment.
- FIG. 6B is a diagram illustrating a detection wave group transmitted by the in-vehicle device 2.
- FIG. 6C shows the second position 92 (where the vehicle door is open), the third position 93 (where the vehicle door is closed), and the second position 92 (where the vehicle door is closed) shown in FIG. 6A.
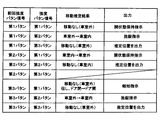
- FIG. 7 shows the estimation results for the movement of the portable device 3 and the output based on the estimation results when signals illustrated as the first pattern to the third pattern are acquired as the intensity pattern signal and the previous intensity pattern signal. It is a figure which shows an example.
- a signal illustrated as a third pattern is acquired as an intensity pattern signal (previous intensity pattern signal), and immediately thereafter, a signal illustrated as a second pattern is used as a new intensity pattern signal. Assume that it was acquired.
- the control unit 15 compares the intensity pattern signal with the previous intensity pattern signal, and the reception intensity corresponding to the detection wave transmitted from the P seat antenna 113 is increased.
- the movement of the portable device 3 to is estimated.
- the control unit 15 is based on the fact that these are intensity pattern signals when the sliding door is in a closed state. In other words, the user carrying the portable device 3 exists in the vehicle compartment and the sliding door is closed. Based on the state, a locking instruction for locking the sliding door is output to the door locking mechanism.
- a signal illustrated as a third pattern is acquired as an intensity pattern signal (previous intensity pattern signal), and immediately thereafter, a signal illustrated as a first pattern is acquired as a new intensity pattern signal.
- the control unit 15 compares the intensity pattern signal with the previous intensity pattern signal and estimates that the portable device 3 has not moved, and also estimates that the slide door has changed from the closed state to the open state. And as an example, the control part 15 outputs the alerting
- a signal illustrated as a second pattern is acquired as an intensity pattern signal (previous intensity pattern signal), and immediately thereafter, a signal illustrated as a first pattern is acquired as a new intensity pattern signal.
- the control unit 15 estimates the movement of the portable device 3 from the vehicle interior to the vehicle interior by comparing the intensity pattern signal with the previous intensity pattern signal. And as an example, the control part 15 outputs the open state holding
- the estimated position of the portable device 3 is output to the control target unit 14, and the estimated position of the portable device 3 is used in the processing in the control target unit 14. Also good.
- FIG. 8A is a diagram illustrating a detection wave group transmitted by the in-vehicle device 2.
- FIG. 8C is a diagram showing an example of an intensity pattern diagram when the portable device 3 is located at each of the second position (where the vehicle door is closed) and the first position shown in FIG. is there.
- FIG. 9 shows the estimated result of the movement of the portable device 3 and the output accompanying the estimated result when the signals illustrated as the fourth pattern to the fifth pattern are acquired as the intensity pattern signal and the previous intensity pattern signal, respectively.
- a signal illustrated as a fourth pattern is acquired as an intensity pattern signal (previous intensity pattern signal), and immediately thereafter, a signal illustrated as a fifth pattern is used as a new intensity pattern signal. Assume that it was acquired.
- the control unit 15 compares the intensity pattern signal with the previous intensity pattern signal, and estimates the movement of the portable device 3 from the vicinity of the vehicle door to the vicinity of the trunk room. For example, when the position near the trunk room is detected as the estimated position of the portable device 3 for a predetermined period or longer, the control unit 15 outputs a trunk room unlocking instruction for unlocking the trunk room.
- a signal illustrated as a fifth pattern is acquired as an intensity pattern signal (previous intensity pattern signal), and immediately thereafter, a signal illustrated as a fourth pattern is acquired as a new intensity pattern signal.
- the control unit 15 compares the intensity pattern signal with the previous intensity pattern signal, and estimates the movement of the portable device 3 from the vicinity of the trunk room to the vicinity of the vehicle door. For example, when the trunk room is in an unlocked state, the control unit 15 outputs a notification instruction for performing notification with a speaker that conveys a message that locks the trunk room.
- control unit 15 may output the estimated position of the portable device 3 to the control target unit 14 as described above, or the trunk room at that time An instruction to hold the state (unlocked state or locked state) may be output.
- FIG. 10A As an example, the vehicle door on the driver's seat side is configured to be opened and closed by a hinge, and the position of the D seat antenna 112 is changed from the closed state position 112c to the open state according to the open / close state of the vehicle door. It changes like the state position 112d.
- a fourth position 94 (P4) indicates a position outside the passenger compartment behind the vehicle door.
- FIG. 10B is a diagram illustrating a detection wave group transmitted by the in-vehicle device 2.
- FIG.10 (c) is a figure which shows an example of an intensity
- the intensity pattern diagrams will be referred to as a sixth pattern and a seventh pattern, respectively.
- a signal illustrated as a sixth pattern is acquired as an intensity pattern signal (previous intensity pattern signal), and then a signal illustrated as a seventh pattern is acquired as a new intensity pattern signal.
- the control unit 15 estimates the fourth position 94 as the position of the portable device 3 and outputs an instruction to automatically open the vehicle door to the door opening / closing mechanism.
- the reception intensity of the reception wave corresponding to the detection wave transmitted from the D seat antenna 112 and the P seat antenna 113 increases. Therefore, when the signal illustrated as the seventh pattern is acquired as the intensity pattern signal, the control unit 15 estimates that the portable device 3 does not move and transmits from the D seat antenna 112 and the P seat antenna 113.
- an instruction to automatically open the vehicle door is output to the door opening / closing mechanism.
- the control unit 15 determines the position of the portable device 3 based on the magnitude relationship between the reception strengths of the reception waves of the transmission antennas 112 to 114 in the intensity pattern signal. May be estimated, or the position of the portable device 3 may be estimated based on a comparison between a basic pattern signal recorded in advance in the ROM 52 and an intensity pattern signal generated based on the received intensity signal. In the latter case, for example, in the operation example 1, the control unit 15 records the signal illustrated in FIG. 5C in the ROM 52 as a basic pattern signal whose basic position is the first position 91, and receives the reception intensity. The position of the portable device 3 may be estimated based on a comparison between the intensity pattern generated based on the signal and the basic pattern signal.
- the intensity pattern signal is a signal indicating the reception intensity of the reception wave corresponding to the detection wave from the transmission antenna selected from among the transmission antennas 112 to 114. For this reason, the position which the portable device 3 can take with respect to each transmission antenna is specified based on the magnitude relation of the reception intensity of the reception wave for each selected transmission antenna. Thereby, the position of the portable device 3 is estimated.
- the position of the portable device 3 can be estimated based on the intensity pattern signal, the number of transmissions is smaller than that in the conventional technique in which the number of transmission antennas needs to be increased according to the number of regions to be detected.
- the antenna that is, with a simple configuration, the position of the portable device can be accurately estimated.
- a detection wave having a predetermined intensity is transmitted from the transmission antennas 112 to 114. According to this, it is possible to accurately estimate the position of the portable device 3 with a simpler configuration than the conventional technique that needs to transmit detection signals in different formats for each transmission antenna.
- the control unit 15 may estimate the movement of the portable device 3 based on a change with time of the intensity pattern signal. According to this, the movement of the portable device 3 can be estimated with a simple configuration.
- the transmission antennas 112 to 114 may have a communication range both inside and outside the vehicle interior. According to this, the position of the portable device 3 can be estimated based on the intensity pattern signal with a small number of transmission antennas. As a result, the in-vehicle device 2 and the smart entry system 1 can be easily configured.
- the control unit 15 may select the transmission antennas 112 to 114 in accordance with the basic order for each predetermined antenna selection period and transmit the detection wave. According to this, by performing sampling based on the antenna selection period in the received wave group or the received intensity signal, each received wave corresponding to the detected wave transmitted from the transmitting antennas 112 to 114 can be easily identified. be able to. As a result, the position of the portable device 3 can be estimated with high accuracy.
- the basic order may be determined so as to go around the transmission antennas 112 to 114, that is, all the transmission antennas are selected once. According to this, compared with the case where the basic order is not determined to make a round of the transmission antennas 112 to 114, that is, only the D seat antenna 112 and the P seat antenna 113 are selected multiple times, for example. Thus, the position of the portable device 3 can be estimated with higher accuracy than the case where it is determined as described above.
- the control unit 15 may transmit the detection wave group by repeating this basic procedure a plurality of times (three times in the above embodiment), with the procedure of transmitting the detection wave according to the basic order as a basic procedure. According to this, tolerance to noise or the like can be improved. As a result, the position of the portable device 3 can be estimated with high accuracy.
- the [4G] ROM 52 may previously record an intensity pattern signal when the portable device 3 is located at a predetermined basic position in the communication range of the transmission antennas 112 to 114 as a basic pattern signal. Further, the control unit 15 may determine whether or not the portable device 3 is located at the basic position based on the comparison between the acquired intensity pattern signal and the basic pattern signal. According to this, by recording basic pattern signals for various basic positions in the ROM 52, it is possible to accurately estimate the position of the portable device 3 with a small number of antennas based on these basic pattern signals. Can do.
- the control unit 15 may perform output in accordance with the estimated position of the portable device 3. According to this, according to the position of the user carrying the portable device 3, various controls such as opening / closing operation of the vehicle door and locking / unlocking operation of the trunk room door can be appropriately performed.
- the control unit 15 may perform output according to the estimated movement of the portable device 3. According to this, various detailed control can be performed according to various movement situations of the user carrying the portable device 3.
- the in-vehicle device 2 corresponds to an example of a position estimation device
- the portable device 3 corresponds to an example of a portable device
- the transmission antennas 112 to 114 correspond to an example of a detection antenna
- the control unit 15 Is equivalent to an example as a transmission unit, a reception unit, a position estimation unit, an output unit, and a movement estimation unit
- the ROM 52 is equivalent to an example as a recording unit.
- S135 corresponds to an example of processing as a transmission unit
- S140 corresponds to an example of processing as a reception unit
- S150 corresponds to an example of processing as a position estimation unit
- S165 corresponds to an example of processing as an output unit. This corresponds to an example
- S160 corresponds to an example of processing as a movement estimation unit.
- the detection wave is transmitted from the vehicle-mounted device 2 using the first frequency, but the frequency of the detection wave is not limited to this.
- detection waves may be transmitted at different frequencies for each of the selected transmission antennas 112 to 114.
- the received intensity signal transmitted from the portable device 3 to the in-vehicle device 2 is a signal in which the received intensity in the received wave group is arranged in time series, but is not limited thereto.
- the received intensity signal may be a signal indicating the received intensity for each received wave in the received wave group. That is, in the portable device 3, the reception intensity in the reception wave group is generated as a signal indicating the reception intensity for each reception wave by the portable device corresponding to the detection wave transmitted from each selected transmission antenna, You may transmit this to the vehicle equipment 2 as a received intensity signal.
- the operation example shown in the above embodiment is merely an example.
- various movements of the user carrying the portable device 3 and various movements of each part of the vehicle in which the transmission antenna is installed are shown. May be detected.
- the control unit 15 outputs an instruction to stop the operation of closing the vehicle door to the door opening / closing mechanism. May be.
- the present disclosure includes the smart entry system 1, the in-vehicle device 2, the control unit 15, the portable device 3, the portable device control unit 33, a program for causing the control unit 15 to function, and a medium storing the program It can be realized in various forms such as a program for causing the portable device control unit 33 to function, a medium on which the program is recorded, and a position estimation method.
- each section is expressed as, for example, S100. Further, each section can be divided into a plurality of subsections, while a plurality of sections can be combined into one section. Further, each section configured in this manner can be referred to as a device, module, or means.
Landscapes
- Physics & Mathematics (AREA)
- Engineering & Computer Science (AREA)
- Electromagnetism (AREA)
- General Physics & Mathematics (AREA)
- Radar, Positioning & Navigation (AREA)
- Remote Sensing (AREA)
- Mechanical Engineering (AREA)
- Lock And Its Accessories (AREA)
- Position Fixing By Use Of Radio Waves (AREA)
Abstract
A position estimating device is provided with a plurality of detection antennas (112-114), a transmitting unit (15, S135), and a position estimating unit (15, S150). The detection antennas have a pre-set communication range, and are provided in different installation positions in a vehicle. The transmitting unit selects a detection antenna one at a time in accordance with a pre-set fundamental order so that time periods for transmission do not overlap, and transmits a detection wave having a pre-set intensity via the selected detection antenna. In the position estimating unit, detection waves transmitted by the transmitting unit are configured as a detection wave group, a detection wave group received by a portable device is configured as a reception wave group, and a signal indicating the reception intensity of detection waves for each selected detection antenna in the reception wave group is configured as an intensity pattern signal, and the position of the portable device is estimated on the basis of the reception intensity for each detection antenna in the intensity pattern signal.
Description
本出願は、2014年12月26日に出願された日本出願番号2014-266100号に基づくもので、ここにその記載内容を援用する。
This application is based on Japanese Application No. 2014-266100 filed on Dec. 26, 2014, the contents of which are incorporated herein by reference.
本開示は、車両に搭載され、ユーザに携帯される携帯装置の位置を推定する位置推定装置に関する。
The present disclosure relates to a position estimation device that estimates the position of a portable device that is mounted on a vehicle and carried by a user.
車両のユーザに携帯され通信を行う携帯装置を車両に予め登録された電子キーとして使用し、車両ドアの施錠及び解錠やエンジン始動操作等の車両の制御を行う技術が知られている。このような技術では、車両に対する携帯装置の位置を推定する技術が重要となる。
2. Description of the Related Art A technique for controlling a vehicle such as locking and unlocking a vehicle door and starting an engine using a portable device that is carried by a vehicle user and communicates as an electronic key registered in advance in the vehicle is known. In such a technique, a technique for estimating the position of the portable device with respect to the vehicle is important.
特許文献1では、このような携帯装置が車両内外の予め定められた領域のうちいずれの領域に位置するかを推定するために、領域の数に応じて検出アンテナを車両に設置して該検出アンテナ毎に異なる形式の検出信号を送信し、携帯装置にて受信された検出信号がどの検出アンテナから送信されたものであるかを特定できた場合に、特定された検出アンテナの送信領域を携帯装置の位置として推定する技術が開示されている。
In Patent Document 1, in order to estimate in which of the predetermined areas inside and outside the vehicle such a mobile device is located, a detection antenna is installed in the vehicle according to the number of areas and the detection is performed. When a detection signal of a different format is transmitted for each antenna and the detection signal received by the portable device can be identified from which detection antenna, the transmission area of the identified detection antenna is carried. A technique for estimating the position of the apparatus is disclosed.
しかしながら、前述の技術では、精度よく位置を推定するためには、検出アンテナの数を増やす必要があり、構成が複雑になる。
However, in the above technique, in order to estimate the position with high accuracy, it is necessary to increase the number of detection antennas, and the configuration becomes complicated.
本開示は、簡易な構成で、精度よく位置を推定することができる位置推定装置を提供することを目的としている。
This disclosure is intended to provide a position estimation device that can accurately estimate a position with a simple configuration.
本開示の一態様によれば、車両に搭載され、ユーザに携帯される携帯装置の位置を検出する位置推定装置は、複数の検出アンテナと、送信部と、位置推定部とを備える。複数の検出アンテナは、予め定められた通信範囲を有し、それぞれ車両における異なる設置位置に設けられている。送信部は、送信する時間帯が重ならないように検出アンテナを1つずつ予め定められた基本順序に従って選択し、選択された検出アンテナを介して、予め定められた強度の検出波を送信する。推定部は、送信部によって送信された検出波を検出波群とし、携帯装置により受信された検出波群を受信波群とし、受信波群において選択された検出アンテナ毎の検出波の受信強度を示す信号を強度パタン信号として、強度パタン信号における検出アンテナ毎の受信強度に基づいて、携帯装置の位置を推定する。
According to one aspect of the present disclosure, a position estimation device that detects the position of a mobile device that is mounted on a vehicle and carried by a user includes a plurality of detection antennas, a transmission unit, and a position estimation unit. The plurality of detection antennas have a predetermined communication range, and are provided at different installation positions in the vehicle. The transmission unit selects detection antennas one by one in accordance with a predetermined basic order so that transmission time zones do not overlap, and transmits a detection wave having a predetermined intensity via the selected detection antenna. The estimation unit sets the detection wave transmitted by the transmission unit as the detection wave group, sets the detection wave group received by the portable device as the reception wave group, and determines the reception intensity of the detection wave for each detection antenna selected in the reception wave group. Using the received signal as an intensity pattern signal, the position of the portable device is estimated based on the reception intensity of each detection antenna in the intensity pattern signal.
検出アンテナから予め定められた等しい強度の検出波が送信される場合、携帯装置による検出波の受信強度は、検出波が送信された検出アンテナに対する携帯装置の距離が近いときに、距離が遠いときよりも、大きくなる。上記の構成では、強度パタン信号が示す検出アンテナ毎の検出波の携帯装置による受信強度の大小関係に基づいて、それぞれの検出アンテナに対する携帯装置がとり得る範囲が特定され、携帯装置の位置が推定される。
When a detection wave having a predetermined equal intensity is transmitted from the detection antenna, the reception intensity of the detection wave by the portable device is when the distance of the portable device is short or far from the detection antenna to which the detection wave is transmitted. It will be bigger than. In the above configuration, the range that the portable device can take for each detection antenna is specified based on the magnitude relationship of the received intensity of the detection wave for each detection antenna indicated by the intensity pattern signal, and the position of the portable device is estimated Is done.
これによれば、携帯装置により受信された検出波の受信強度の大小関係に基づいて携帯装置の位置を推定するため、位置を検出したい領域の数に応じて検出アンテナの数を増加させる必要がある従来技術よりも少ない数の検出アンテナで、すなわち簡易な構成で、携帯装置の位置を精度よく推定することができる。
According to this, since the position of the portable device is estimated based on the magnitude relationship of the reception strengths of the detection waves received by the portable device, it is necessary to increase the number of detection antennas according to the number of regions whose positions are to be detected. It is possible to accurately estimate the position of the portable device with a smaller number of detection antennas than a certain prior art, that is, with a simple configuration.
本開示についての上記目的およびその他の目的、特徴や利点は、添付の図面を参照しながら下記の詳細な記述により、より明確になる。図面において、
車載機、及び携帯機を備えたスマートエントリシステムの構成を示すブロック図。
車載機の制御部が実行する位置推定処理の一例を示すフローチャート。
携帯機の携帯機制御部が実行する受信強度信号送信処理の一例を示すフローャート。
スマートエントリシステムとしての処理の一例を説明する図。
第1作動例について、(a)はアンテナの設置位置を示す図であり、(b)は検出波の送信タイミングを示す図であり、(c)は強度パタン信号を説明する図。
第2作動例について、(a)はアンテナの設置位置を示す図であり、(b)は検出波の送信タイミングを示す図であり、(c)は強度パタン信号を説明する図。
第2作動例について、携帯機の移動推定結果及び推定結果に基づく出力の一例を示す図。
第3作動例について、(a)はアンテナの設置位置を示す図であり、(b)は検出波の送信タイミングを示す図であり、(c)は強度パタン信号を説明する図。
第3作動例について、携帯機の移動推定結果及び推定結果に基づく出力の一例を示す図。
第4作動例について、(a)はアンテナの設置位置を示す図であり、(b)は検出波の送信タイミングを示す図であり、(c)は強度パタン信号を説明する図。
The above and other objects, features, and advantages of the present disclosure will become more apparent from the following detailed description with reference to the accompanying drawings. In the drawing
The block diagram which shows the structure of the smart entry system provided with the vehicle equipment and the portable device. The flowchart which shows an example of the position estimation process which the control part of a vehicle equipment performs. The float which shows an example of the receiving intensity signal transmission process which the portable device control part of a portable device performs. The figure explaining an example of the process as a smart entry system. (A) is a figure which shows the installation position of an antenna about a 1st operation example, (b) is a figure which shows the transmission timing of a detection wave, (c) is a figure explaining an intensity | strength pattern signal. (A) is a figure which shows the installation position of an antenna about a 2nd operation example, (b) is a figure which shows the transmission timing of a detection wave, (c) is a figure explaining an intensity | strength pattern signal. The figure which shows an example of the output based on the movement estimation result of a portable machine, and an estimation result about a 2nd operation example. (A) is a figure which shows the installation position of an antenna about a 3rd operation example, (b) is a figure which shows the transmission timing of a detection wave, (c) is a figure explaining an intensity | strength pattern signal. The figure which shows an example of the output based on the movement estimation result of a portable machine, and an estimation result about a 3rd operation example. (A) is a figure which shows the installation position of an antenna about a 4th operation example, (b) is a figure which shows the transmission timing of a detection wave, (c) is a figure explaining an intensity | strength pattern signal.
以下、本開示が適用された実施形態について、図面を用いて説明する。
Hereinafter, embodiments to which the present disclosure is applied will be described with reference to the drawings.
[1.構成]
図1は、本開示が適用された実施形態であるスマートエントリシステム1の構成を表すブロック図である。スマートエントリシステム1は、車両に搭載された車載機2と、車両のユーザが携帯し得る携帯機3とを備える。スマートエントリシステム1は、携帯機3を車両に予め登録された電子キーとして使用し、携帯機3と車載機2との間で通信を行うことにより、車両ドアの施錠及び解錠やエンジン始動操作等の車両の制御を行うシステムである。 [1. Constitution]
FIG. 1 is a block diagram illustrating a configuration of asmart entry system 1 that is an embodiment to which the present disclosure is applied. The smart entry system 1 includes an in-vehicle device 2 mounted on a vehicle and a portable device 3 that can be carried by a user of the vehicle. The smart entry system 1 uses the portable device 3 as an electronic key registered in advance in the vehicle, and performs communication between the portable device 3 and the in-vehicle device 2 to lock and unlock the vehicle door and start the engine. It is a system which controls vehicles, such as.
図1は、本開示が適用された実施形態であるスマートエントリシステム1の構成を表すブロック図である。スマートエントリシステム1は、車両に搭載された車載機2と、車両のユーザが携帯し得る携帯機3とを備える。スマートエントリシステム1は、携帯機3を車両に予め登録された電子キーとして使用し、携帯機3と車載機2との間で通信を行うことにより、車両ドアの施錠及び解錠やエンジン始動操作等の車両の制御を行うシステムである。 [1. Constitution]
FIG. 1 is a block diagram illustrating a configuration of a
[1-1.携帯機の構成]
はじめに、携帯機3の構成を説明する。携帯機3は、車両ドアの施錠及び解錠、エンジン始動操作のうち少なくとも一つを行うための電子キーとして機能するものであり、車載機2との間でデータの送受信を行う無線通信装置である。携帯機3は、LF受信部31、RF送信部32、及び携帯機制御部33を備える。 [1-1. Configuration of portable device]
First, the configuration of theportable device 3 will be described. The portable device 3 functions as an electronic key for performing at least one of locking and unlocking of a vehicle door and engine starting operation, and is a wireless communication device that transmits and receives data to and from the in-vehicle device 2. is there. The portable device 3 includes an LF reception unit 31, an RF transmission unit 32, and a portable device control unit 33.
はじめに、携帯機3の構成を説明する。携帯機3は、車両ドアの施錠及び解錠、エンジン始動操作のうち少なくとも一つを行うための電子キーとして機能するものであり、車載機2との間でデータの送受信を行う無線通信装置である。携帯機3は、LF受信部31、RF送信部32、及び携帯機制御部33を備える。 [1-1. Configuration of portable device]
First, the configuration of the
LF受信部31は、車載機2から送信された予め定められた第1の周波数(例えばLF帯(約百KHz))の送信波を図示しない受信アンテナを介して受信して、車載機2から送信された送信用データを復調する。RF送信部32は、携帯機制御部33からの応答用データを用いて予め定められた第2の周波数(例えばUHF帯(三百~四百MHz帯))の送信用搬送波を変調することにより車載機2への送信信号を生成し、送信アンテナ(図示せず)から送信する。
The LF receiving unit 31 receives a transmission wave of a predetermined first frequency (for example, LF band (about 100 KHz)) transmitted from the in-vehicle device 2 via a reception antenna (not shown), and from the in-vehicle device 2. The transmitted transmission data is demodulated. The RF transmission unit 32 modulates a transmission carrier wave of a predetermined second frequency (for example, UHF band (300 to 400 MHz band)) using response data from the portable device control unit 33. A transmission signal to the in-vehicle device 2 is generated and transmitted from a transmission antenna (not shown).
携帯機制御部33は、CPU331、ROM332、RAM333等を有するマイクロコンピュータを備える電子機器である。ROM332には、携帯機3を、車両の車載機2に予め登録された電子キーとして機能させるためのIDコードが記録されている。以下では、車両の車載機2に予め登録された電子キーを登録キーというものとする。
The portable device control unit 33 is an electronic device including a microcomputer having a CPU 331, a ROM 332, a RAM 333, and the like. In the ROM 332, an ID code for causing the portable device 3 to function as an electronic key registered in advance in the vehicle-mounted device 2 of the vehicle is recorded. Hereinafter, an electronic key registered in advance in the vehicle-mounted device 2 of the vehicle is referred to as a registration key.
CPU331は、ROM332に記録されたプログラムに従って、携帯機3の機能を実現するための各種処理を実行する。例えば、携帯機制御部33は、図示しない電源供給回路の制御を行うことによって、電源が供給されていない状態(スリープ状態)のRF送信部32を、電源が供給された状態(ウェイクアップ状態)に移行させる。また、ウェイクアップ状態のRF送信部32をスリープ状態に移行させる。
The CPU 331 executes various processes for realizing the functions of the portable device 3 according to the program recorded in the ROM 332. For example, the portable device control unit 33 controls the power supply circuit (not shown), so that the RF transmission unit 32 in a state where the power is not supplied (sleep state) is in a state where the power is supplied (wakeup state). To migrate. In addition, the RF transmitter 32 in the wake-up state is shifted to the sleep state.
また、CPU331は、ROM332に記録されたプログラムに従って、車載機2から送信された検出波群を受信した場合に、検出波群の受信強度に基づいて車載機2に携帯機3の位置を推定させるための受信強度信号を送信する受信強度信号送信処理を実行する。
Further, when the CPU 331 receives the detection wave group transmitted from the in-vehicle device 2 according to the program recorded in the ROM 332, the CPU 331 causes the in-vehicle device 2 to estimate the position of the portable device 3 based on the reception intensity of the detection wave group. Reception intensity signal transmission processing for transmitting a reception intensity signal for the purpose is executed.
[1-2.車載機の構成]
次に、車載機2の構成を説明する。車載機2は、LF通信部11、RF通信部12、センサ部13、制御対象部14、及び制御部15を備える。 [1-2. In-vehicle device configuration]
Next, the configuration of the in-vehicle device 2 will be described. The in-vehicle device 2 includes an LF communication unit 11, an RF communication unit 12, a sensor unit 13, a control target unit 14, and a control unit 15.
次に、車載機2の構成を説明する。車載機2は、LF通信部11、RF通信部12、センサ部13、制御対象部14、及び制御部15を備える。 [1-2. In-vehicle device configuration]
Next, the configuration of the in-
LF通信部11は、LF送信部111、ドライバ席送信アンテナ112、助手席アンテナ113、及びトランク送信アンテナ114を備える。なお以下では、ドライバ席送信アンテナをD席アンテナ112といい、助手席アンテナ113をP席アンテナ113といい、トランク送信アンテナ114をTアンテナ114といい、という。また、説明に応じて、D席アンテナ112、P席アンテナ113、及びTアンテナ114を、送信アンテナ112~114のように記載する。図面においては、ドライバ席送信アンテナ112をDアンテナ、助手席アンテナ113をPアンテナ、トランク送信アンテナ114をTアンテナと示す。また、後述するRF受信アンテナ122については、図面においてはRFアンテナと示す。
The LF communication unit 11 includes an LF transmission unit 111, a driver seat transmission antenna 112, a passenger seat antenna 113, and a trunk transmission antenna 114. In the following, the driver seat transmission antenna is referred to as the D seat antenna 112, the passenger seat antenna 113 is referred to as the P seat antenna 113, and the trunk transmission antenna 114 is referred to as the T antenna 114. Further, according to the description, the D seat antenna 112, the P seat antenna 113, and the T antenna 114 are described as transmitting antennas 112 to 114. In the drawing, the driver's seat transmission antenna 112 is indicated as D antenna, the passenger's seat antenna 113 is indicated as P antenna, and the trunk transmission antenna 114 is indicated as T antenna. Further, an RF receiving antenna 122 to be described later is indicated as an RF antenna in the drawing.
LF送信部111は、制御部15から出力された送信用データを用いてLF帯である第1の周波数の送信用搬送波を変調することにより携帯機3への送信信号を生成し、生成した送信信号を各送信アンテナ112~114から送信波として送信する。後述する図5(a)に示すように、D席アンテナ112はドライバ席側の車両ドアの車室内側に設けられ、P席アンテナ113は助手席側の車両ドアの車室内側に設けられ、Tアンテナ114はトランクルームドアのトランクルーム外側に設けられている。各送信アンテナ112~114は、これら各ドアを中心として、車室内及び車室外の両方に、予め定められた範囲の通信範囲を有する。
The LF transmission unit 111 generates a transmission signal to the portable device 3 by modulating the transmission carrier wave of the first frequency that is the LF band using the transmission data output from the control unit 15, and the generated transmission A signal is transmitted as a transmission wave from each of the transmission antennas 112 to 114. As shown in FIG. 5A, which will be described later, the D seat antenna 112 is provided on the vehicle interior side of the vehicle door on the driver seat side, and the P seat antenna 113 is provided on the vehicle interior side of the vehicle door on the passenger seat side. The T antenna 114 is provided outside the trunk room of the trunk room door. Each transmission antenna 112 to 114 has a communication range of a predetermined range both inside and outside the vehicle with these doors as the center.
図1に戻り説明を続ける。LF送信部111は、送信アンテナ112~114からの送信強度が等しくなるように、送信波を送信させる。また、LF送信部111は図示しない切替器を備え、該切替器によって、制御部15からの切替指示に従って、送信アンテナ112~114のうちいずれか一つを送信波を送信させるアンテナとして選択することが可能である。以下では、切替指示に従って選択されたアンテナを選択アンテナという。制御部15から出力された送信用データに基づく送信波は、選択アンテナからのみ送信される。すなわち、送信アンテナ112~114のうち選択アンテナ以外のアンテナからは、送信波が出力されないようになっている。
Referring back to FIG. The LF transmitter 111 transmits the transmission wave so that the transmission intensities from the transmission antennas 112 to 114 are equal. Further, the LF transmission unit 111 includes a switch (not shown), and selects one of the transmission antennas 112 to 114 as an antenna for transmitting a transmission wave according to the switch instruction from the control unit 15 by the switch. Is possible. Hereinafter, the antenna selected according to the switching instruction is referred to as a selected antenna. A transmission wave based on the transmission data output from the control unit 15 is transmitted only from the selected antenna. That is, no transmission wave is output from any of the transmission antennas 112 to 114 other than the selected antenna.
RF通信部12は、例えば運転席前方のルームミラーに設置される。なお、RF通信部12の設置位置はこれに限るものではなく、ピラー及びトランクルーム等に設けられていてもよい。RF通信部12は、RF受信部121及びRF受信アンテナ122を備える。
The RF communication unit 12 is installed, for example, in a room mirror in front of the driver's seat. The installation position of the RF communication unit 12 is not limited to this, and may be provided in a pillar, a trunk room, or the like. The RF communication unit 12 includes an RF reception unit 121 and an RF reception antenna 122.
RF受信部121は、RF受信アンテナ122介して、携帯機3から送信された第2の周波数の送信波を受信し、RF受信部121は、RF受信アンテナ122を介して受信された受信信号から携帯機3による応答用データを復調して、制御部15に入力する。
The RF reception unit 121 receives a transmission wave of the second frequency transmitted from the portable device 3 via the RF reception antenna 122, and the RF reception unit 121 receives the reception signal received via the RF reception antenna 122. Data for response from the portable device 3 is demodulated and input to the control unit 15.
センサ部13は、ロックセンサ131、及びアンロックセンサ132を備える。ロックセンサ131は、運転席側の車両ドアのドアハンドル付近に設けられたタッチセンサであり、ユーザの人体の一部によるロックセンサ131への接触を検出し、検出信号を制御部15へ出力する。なお、ここでいうユーザとは、運転者を含む自車両の乗員をいう。アンロックセンサ132は、運転席側の車両ドアのドアハンドルに設けられたタッチセンサであり、ユーザの人体の一部によるアンロックセンサ132への接触を検出し、検出信号を制御部15へ出力する。
The sensor unit 13 includes a lock sensor 131 and an unlock sensor 132. The lock sensor 131 is a touch sensor provided in the vicinity of the door handle of the vehicle door on the driver's seat side, detects contact of the part of the user's human body with the lock sensor 131, and outputs a detection signal to the control unit 15. . In addition, a user here means the passenger | crew of the own vehicle containing a driver | operator. The unlock sensor 132 is a touch sensor provided on the door handle of the vehicle door on the driver's seat side, detects contact with the unlock sensor 132 by a part of the user's human body, and outputs a detection signal to the control unit 15. To do.
制御対象部14は、一例として、運転席側の車両ドアを開閉させるドア開閉機構、その車両ドアの施錠及び解錠を行うドア施解錠機構、トランクルームドアの施錠及び解錠を行うトランクルームドア施解錠機構、音声による報知を行うスピーカ等を、少なくとも備える。
The control target unit 14 includes, for example, a door opening / closing mechanism that opens and closes a vehicle door on the driver's seat side, a door locking / unlocking mechanism that locks and unlocks the vehicle door, and a trunk room door locking / unlocking that locks and unlocks the trunk room door. At least a mechanism and a speaker for performing voice notification are provided.
制御部15は、CPU51、ROM52、RAM53等を有するマイクロコンピュータを備える電子制御装置である。制御部15のROM52には、登録キーのIDコードや、後述する各種の基本パタン信号が記録されている。また、ROM52には各種のプログラムが記録されており、制御部15(CPU51)は、該ROM52に記録されたプログラムに従って、携帯機3との通信に基づく各種制御を行うための処理を実行する。
The control unit 15 is an electronic control device including a microcomputer having a CPU 51, a ROM 52, a RAM 53, and the like. The ROM 52 of the control unit 15 stores an ID code of a registration key and various basic pattern signals described later. Various programs are recorded in the ROM 52, and the control unit 15 (CPU 51) executes processing for performing various controls based on communication with the portable device 3 in accordance with the programs recorded in the ROM 52.
例えば、制御部15は、携帯機3が車両ドアに対して予め定められた範囲内に位置している場合に、ロックセンサ131から検出信号を受信すると施解錠機構によって車両ドアを施錠状態にし、アンロックセンサ22から検出信号を受信するとドア施解錠機構によって車両ドアを解錠状態にする制御を行う。
For example, when the portable device 3 is located within a predetermined range with respect to the vehicle door, the control unit 15 receives the detection signal from the lock sensor 131 and locks the vehicle door by the locking / unlocking mechanism. When the detection signal is received from the unlock sensor 22, the vehicle door is unlocked by the door locking / unlocking mechanism.
また、制御部15は、これらの処理と並行して、携帯機3へ検出波(検出波群)を送信し、検出波群の受信結果に基づいて携帯機3にて生成された受信強度信号を受信し、該受信強度信号に基づいて携帯機3の位置を推定するための位置推定処理を実行する。
In parallel with these processes, the control unit 15 transmits a detection wave (detection wave group) to the portable device 3, and a reception intensity signal generated by the portable device 3 based on the reception result of the detection wave group. , And a position estimation process for estimating the position of the portable device 3 based on the received intensity signal is executed.
[2.処理]
次に、車載機2の制御部15及び携帯機3の携帯機制御部33がそれぞれ実行する、携帯機3の位置を推定するための処理について説明する。 [2. processing]
Next, processing for estimating the position of theportable device 3 executed by the control unit 15 of the in-vehicle device 2 and the portable device control unit 33 of the portable device 3 will be described.
次に、車載機2の制御部15及び携帯機3の携帯機制御部33がそれぞれ実行する、携帯機3の位置を推定するための処理について説明する。 [2. processing]
Next, processing for estimating the position of the
[2-1.車載機の処理]
はじめに、車載機2の制御部15(CPU51)が実行する位置推定処理の一例について、図2を用いて説明する。位置推定処理は、例えば車両の停止中に、繰り返し実行される処理である。後述する前回強度パタン信号は、位置推定処理が繰り返し実行される毎に、RAM53に上書きされる。なお、以下の説明文において主語が省略されている場合、その文では制御部15(CPU51)を主語とする。 [2-1. In-vehicle device processing]
First, an example of the position estimation process executed by the control unit 15 (CPU 51) of the in-vehicle device 2 will be described with reference to FIG. The position estimation process is a process that is repeatedly executed while the vehicle is stopped, for example. The previous intensity pattern signal described later is overwritten in the RAM 53 every time the position estimation process is repeatedly executed. In addition, when the subject is abbreviate | omitted in the following explanatory text, the control part 15 (CPU51) is made into a subject in the sentence.
はじめに、車載機2の制御部15(CPU51)が実行する位置推定処理の一例について、図2を用いて説明する。位置推定処理は、例えば車両の停止中に、繰り返し実行される処理である。後述する前回強度パタン信号は、位置推定処理が繰り返し実行される毎に、RAM53に上書きされる。なお、以下の説明文において主語が省略されている場合、その文では制御部15(CPU51)を主語とする。 [2-1. In-vehicle device processing]
First, an example of the position estimation process executed by the control unit 15 (CPU 51) of the in-
はじめに、S110では、携帯機3をウェイクアップ状態に移行させる為のウェイクアップ信号を第1の周波数を用いて送信する。具体的には、D席アンテナ112を選択する切替指示をLF送信部111へ送信すると共に、ウェイクアップ信号を含む送信用データをLF送信部111へ出力する。
First, in S110, a wakeup signal for shifting the portable device 3 to the wakeup state is transmitted using the first frequency. Specifically, a switching instruction for selecting the D-seat antenna 112 is transmitted to the LF transmission unit 111 and transmission data including a wake-up signal is output to the LF transmission unit 111.
続くS115では、S110で送信したウェイクアップ信号に対する携帯機3からの応答信号であるACK信号を、第2の周波数によりRF受信アンテナ122を介してRF受信部121にて受信したか否かを判断する。ACK信号を受信しなかった場合は処理をS110へ移行させ、ACK信号を受信するまでウェイクアップ信号を繰り返し送信する。ACK信号を受信した場合は、処理をS120へ移行させる。
In subsequent S115, it is determined whether or not the ACK signal, which is a response signal from the portable device 3 to the wake-up signal transmitted in S110, is received by the RF reception unit 121 via the RF reception antenna 122 at the second frequency. To do. If the ACK signal is not received, the process proceeds to S110, and the wakeup signal is repeatedly transmitted until the ACK signal is received. If an ACK signal is received, the process proceeds to S120.
S120では、IDコードを第1の周波数を用いて送信する。具体的には、D席アンテナ112を選択する切替指示をLF送信部111へ送信すると共に、ROM52に記録されている登録キーとしてのIDコードを含む送信用データをLF送信部111へ出力する。
In S120, the ID code is transmitted using the first frequency. Specifically, a switching instruction for selecting the D-seat antenna 112 is transmitted to the LF transmission unit 111, and transmission data including an ID code as a registration key recorded in the ROM 52 is output to the LF transmission unit 111.
続くS125では、S120で送信したIDコードに対する携帯機3からの応答信号であるコード応答信号を、第2の周波数によりRF受信部121にて受信したか否かを判断する。コード応答信号を受信しなかった場合はコード応答信号を受信するまで待機し、コード応答信号を受信した場合は処理をS130へ移行させる。
In the subsequent S125, it is determined whether or not the RF receiver 121 has received a code response signal, which is a response signal from the portable device 3 to the ID code transmitted in S120, at the second frequency. If no code response signal is received, the process waits until a code response signal is received. If a code response signal is received, the process proceeds to S130.
S130では、S125にて受信したコード応答信号が、一致信号であるか否かを判断する。一致信号は、S120で送信したIDコードと、携帯機3に予め登録されているIDコードとが一致した場合に、すなわち携帯機3が車載機2の登録キーである場合に、携帯機3から送信される信号である。一致信号を受信しなかった場合は処理をS110へ移行させ、一致信号を受信した場合は処理をS135へ移行させる。
In S130, it is determined whether or not the code response signal received in S125 is a coincidence signal. The coincidence signal is received from the portable device 3 when the ID code transmitted in S120 matches the ID code registered in advance in the portable device 3, that is, when the portable device 3 is the registration key of the in-vehicle device 2. A signal to be transmitted. If the coincidence signal has not been received, the process proceeds to S110. If the coincidence signal has been received, the process proceeds to S135.
S135では、各送信アンテナ112~114から検出波を送信させる。具体的には、検出波を送信する送信時間帯が重ならないように、D席アンテナ112、P席アンテナ113、Tアンテナ114の順に予め定められた基本順序に従って、予め定められた期間であるアンテナ選択期間毎に、これらの送信アンテナ112~114を切り替える切替指示をLF送信部111へ出力する。そして、アンテナ選択期間毎に、アンテナ選択期間以下の長さに予め定められたアンテナ送信期間のあいだ、LF送信部111へ送信用データを出力する。本実施形態では一例として、アンテナ選択期間とアンテナ送信期間は等しく設定されている。なお、アンテナ送信期間にLF送信部111へ出力する送信用データは、特に定めないが、例えば論理値0及び1が交互に繰り返される信号等のように予め定められたように変化する信号であってもよいし、論理値がランダムに変化する信号であっても良い。
In S135, detection waves are transmitted from the respective transmission antennas 112 to 114. Specifically, an antenna having a predetermined period according to a predetermined basic order in the order of the D seat antenna 112, the P seat antenna 113, and the T antenna 114 so that transmission time zones for transmitting detection waves do not overlap. A switching instruction for switching the transmission antennas 112 to 114 is output to the LF transmission unit 111 for each selection period. Then, for each antenna selection period, transmission data is output to the LF transmission unit 111 during an antenna transmission period that is predetermined to be equal to or shorter than the antenna selection period. In this embodiment, as an example, the antenna selection period and the antenna transmission period are set equal. The transmission data output to the LF transmission unit 111 during the antenna transmission period is not particularly defined, but is a signal that changes as determined in advance, such as a signal in which logical values 0 and 1 are alternately repeated. Alternatively, it may be a signal whose logic value changes at random.
本実施形態では特に、基本順序に従って検出波を送信する手順を基本手順として、この基本手順を3回繰り返して検出波を送信する。すなわち、各送信アンテナから3回ずつ、検出波が繰り返し送信される。以下の説明では、このように、送信アンテナ112~114を基本順序に従って予め定められた切替回数(ここでは3回)切り替えて繰り返し送信される検出波を、検出波群という。なお、アンテナ選択期間と送信アンテナの数と切替回数との積により示される期間を検出送信期間という。
In this embodiment, in particular, a procedure for transmitting detection waves according to a basic order is used as a basic procedure, and this basic procedure is repeated three times to transmit detection waves. That is, the detection wave is repeatedly transmitted from each transmission antenna three times. In the following description, detection waves that are repeatedly transmitted by switching the transmission antennas 112 to 114 in accordance with the basic order in this manner are referred to as a detection wave group. A period indicated by the product of the antenna selection period, the number of transmission antennas, and the number of switching times is referred to as a detection transmission period.
続くS140では、S135で送信した検出波群に対する携帯機3からの応答信号である受信強度信号を第2の周波数にてRF受信部121で受信したか否かを判断する。受信強度信号を受信していない場合は受信するまで待機し、受信強度信号を受信した場合は処理をS145へ移行させる。以下の説明では、携帯機3により受信された検出波及び検出波群を、それぞれ受信波及び受信波群というものとする。本実施形態では、受信強度信号は、受信波群における受信強度の値を時間の経過に伴って示したデータ列である。
In subsequent S140, it is determined whether or not the RF receiving unit 121 has received a reception intensity signal that is a response signal from the portable device 3 to the detected wave group transmitted in S135 at the second frequency. If the reception intensity signal has not been received, the process waits until it is received. If the reception intensity signal has been received, the process proceeds to S145. In the following description, the detection wave and the detection wave group received by the portable device 3 are referred to as a reception wave and a reception wave group, respectively. In the present embodiment, the received intensity signal is a data string that indicates the value of the received intensity in the received wave group over time.
次にS145では、受信強度信号に基づいて、強度パタン信号を生成する。強度パタン信号とは、受信波群において、選択された送信アンテナ112~114毎に送信された検出波の携帯機3による受信強度を示すデータ列である。例えば本実施形態では、受信強度信号をアンテナ選択期間毎にサンプリングして、強度パタン信号を生成してもよい。なお、サンプリング期間はこれに限るものではない。
Next, in S145, an intensity pattern signal is generated based on the received intensity signal. The intensity pattern signal is a data string indicating the reception intensity of the detection wave transmitted from each of the selected transmission antennas 112 to 114 in the reception wave group by the portable device 3. For example, in the present embodiment, the received intensity signal may be sampled every antenna selection period to generate an intensity pattern signal. Note that the sampling period is not limited to this.
続くS150では、携帯機3の位置を推定する。具体的には、例えば、強度パタン信号における、選択された送信アンテナ112~114毎の受信波の受信強度に基づいて、各送信アンテナ112~114に対する携帯機3のとり得る位置を特定し、これから携帯機3の位置を推定する。また、例えば、送信アンテナ112~114の通信範囲における予め定められた基本位置に携帯機3が位置するときの強度パタン信号を基本パタン信号として予めROM52に記録しておき、強度パタン信号と基本パタン信号との比較に基づいて、強度パタン信号が基本パタン信号に一致する場合に、その基本位置を携帯機3の推定位置とする。本実施形態では、取得された強度パタン信号に応じて、これらのいずれかの手法により携帯機3の位置を推定する。
In subsequent S150, the position of the portable device 3 is estimated. Specifically, for example, based on the reception intensity of the received wave for each of the selected transmission antennas 112 to 114 in the intensity pattern signal, the position that the portable device 3 can take with respect to each transmission antenna 112 to 114 is specified. The position of the portable device 3 is estimated. Further, for example, the intensity pattern signal when the portable device 3 is located at a predetermined basic position in the communication range of the transmission antennas 112 to 114 is recorded in the ROM 52 in advance as a basic pattern signal, and the intensity pattern signal and the basic pattern are recorded. Based on the comparison with the signal, when the intensity pattern signal matches the basic pattern signal, the basic position is set as the estimated position of the portable device 3. In the present embodiment, the position of the portable device 3 is estimated by any one of these methods according to the acquired intensity pattern signal.
次にS155では、直前に(直近の過去に)記録された前回強度パタン信号を、RAM53から取得する。
Next, in S155, the previous intensity pattern signal recorded immediately before (in the most recent past) is acquired from the RAM 53.
続くS160では、S145にて生成した強度パタン信号と、S150にて取得した前回強度パタン信号との比較に基づいて、携帯機3の位置の変化、すなわち携帯機3の移動を推定する。
In subsequent S160, based on the comparison between the intensity pattern signal generated in S145 and the previous intensity pattern signal acquired in S150, the change in the position of the portable device 3, that is, the movement of the portable device 3 is estimated.
次にS165では、S150にて推定した携帯機3の位置、及びS160にて推定した携帯機3の移動に応じた出力信号を、制御対象部14へ出力する。
Next, in S165, an output signal corresponding to the position of the portable device 3 estimated in S150 and the movement of the portable device 3 estimated in S160 is output to the control target unit 14.
S170では、S140で受信した強度パタン信号を前回強度パタン信号としてRAM53に上書きして記録して処理をS110へ移行させ、一連の処理を繰り返し実行する。
In S170, the intensity pattern signal received in S140 is overwritten and recorded in the RAM 53 as the previous intensity pattern signal, the process proceeds to S110, and a series of processes is repeatedly executed.
[2-2.携帯機の処理]
次に、携帯機3の携帯機制御部33(CPU331)が実行する受信強度信号送信処理の一例について、図3を用いて説明する。受信強度信号送信処理は、例えば、携帯機3に電源が供給されている間、繰り返し実行される処理である。なお、以下の説明文において主語が省略されている場合、その文では携帯機制御部33(CPU331)を主語とする。 [2-2. Processing of portable device]
Next, an example of reception intensity signal transmission processing executed by the portable device control unit 33 (CPU 331) of theportable device 3 will be described with reference to FIG. The reception strength signal transmission process is a process that is repeatedly executed while power is supplied to the portable device 3, for example. In addition, when the subject is abbreviate | omitted in the following description, the portable machine control part 33 (CPU331) is made into a subject in the sentence.
次に、携帯機3の携帯機制御部33(CPU331)が実行する受信強度信号送信処理の一例について、図3を用いて説明する。受信強度信号送信処理は、例えば、携帯機3に電源が供給されている間、繰り返し実行される処理である。なお、以下の説明文において主語が省略されている場合、その文では携帯機制御部33(CPU331)を主語とする。 [2-2. Processing of portable device]
Next, an example of reception intensity signal transmission processing executed by the portable device control unit 33 (CPU 331) of the
はじめに、S210では、ウェイクアップ信号を第1の周波数でLF受信部31にて受信したか否かを判断する。具体的には、LF受信部31にて復調されたデータにウェイクアップ信号が含まれている場合に、ウェイクアップ信号を受信したと判断する。ウェイクアップ信号を受信していない場合はウェイクアップ信号を受信するまで待機し、ウェイクアップ信号を受信した場合、処理をS215へ移行させる。
First, in S210, it is determined whether or not the LF receiver 31 has received the wakeup signal at the first frequency. Specifically, when the data demodulated by the LF receiver 31 includes a wakeup signal, it is determined that the wakeup signal has been received. If the wake-up signal is not received, the process waits until the wake-up signal is received. If the wake-up signal is received, the process proceeds to S215.
S215では、RF送信部32に電源を供給し、携帯機3をウェイクアップ状態に移行させる。
In S215, power is supplied to the RF transmitter 32, and the portable device 3 is shifted to the wake-up state.
続く、S220では、携帯機3がウェイクアップ状態に移行したことを示すACK信号を送信する。具体的には、ACK信号を含む応答用データを、第2の周波数を用いてRF送信部32によって送信する。
In S220, an ACK signal indicating that the portable device 3 has shifted to the wake-up state is transmitted. Specifically, the response data including the ACK signal is transmitted by the RF transmission unit 32 using the second frequency.
次に、S225では、第1の周波数によりLF受信部31にてIDコードを受信したか否かを判断する。具体的には、LF受信部31にて復調されたデータにIDコードが含まれている場合に、IDコードを受信したと判断する。IDコードを受信していない場合はIDコードを受信するまで待機し、IDコードを受信した場合は、処理をS230へ移行させる。
Next, in S225, it is determined whether or not the LF receiver 31 has received the ID code at the first frequency. Specifically, when the data demodulated by the LF receiver 31 includes an ID code, it is determined that the ID code has been received. If no ID code is received, the process waits until an ID code is received. If an ID code is received, the process proceeds to S230.
S230では、携帯機3がIDコードの送信元の車両(車載機2)の登録キーであるか否かを判断する。具体的には、S225にて受信したIDコードが、予めROM332に登録されたIDコードに一致している場合に、携帯機3が登録キーであると判断する。登録キーでない場合は処理をS235へ移行させ、登録キーである場合は処理をS240へ移行させる。
In S230, it is determined whether or not the portable device 3 is a registration key of the vehicle (onboard device 2) that is the transmission source of the ID code. Specifically, when the ID code received in S225 matches the ID code registered in the ROM 332 in advance, it is determined that the portable device 3 is a registration key. If it is not a registration key, the process proceeds to S235, and if it is a registration key, the process proceeds to S240.
S235では、携帯機3が車載機2の登録キーでないことを示す不一致信号を、第2の周波数を用いてRF送信部32によって送信する。そして、RF送信部32への電源の供給を停止して当該携帯機3をスリープ状態とし、処理をS210へ移行させる。
In S235, the RF transmission unit 32 transmits a mismatch signal indicating that the portable device 3 is not the registration key of the in-vehicle device 2 using the second frequency. Then, the supply of power to the RF transmission unit 32 is stopped, the portable device 3 is set in the sleep state, and the process proceeds to S210.
S240では、携帯機3が車載機2の登録キーであることを示す一致信号を、第2の周波数を用いてRF送信部32によって送信する。
In S240, the coincidence signal indicating that the portable device 3 is the registration key of the in-vehicle device 2 is transmitted by the RF transmission unit 32 using the second frequency.
続くS245では、車載機2からの検出波を受信したか否かを判断する。検出波を受信していない場合には検出波を受信するまで待機し、受信した場合に処理をS250へ移行させる。
In subsequent S245, it is determined whether or not a detection wave from the in-vehicle device 2 has been received. If the detection wave is not received, the process waits until the detection wave is received. If the detection wave is received, the process proceeds to S250.
次にS250では、車載機2から送信される検出波群の受信を完了したか否かを、すなわち検出波を全てを受信したか否かを判断する。前述のように、検出波群は、予め定められた検出送信期間に車載機2からの送信が完了するように設定されている。そこで、一例として本実施形態では、S240で一致信号を送信してから検出送信期間よりも長い期間に予め定められた検出受信期間が経過した場合に、車載機2からの検出波群の受信を完了したと判断する。
Next, in S250, it is determined whether or not reception of the detection wave group transmitted from the in-vehicle device 2 is completed, that is, whether or not all detection waves are received. As described above, the detection wave group is set so that transmission from the in-vehicle device 2 is completed during a predetermined detection transmission period. Thus, as an example, in the present embodiment, when a predetermined detection reception period elapses after the coincidence signal is transmitted in S240, the detection wave group is received from the in-vehicle device 2. Judge that completed.
検出波群の受信を完了した場合に移行するS255では、受信強度信号を生成する。受信強度信号は、車載機2から受信した検出波群の受信強度を受信した時刻に従って順番に並べたデータ列である。すなわち、受信強度信号は、受信波群における受信強度の変化を時系列に示すデータ列である。
In step S255, when the reception of the detection wave group is completed, a reception intensity signal is generated. The reception intensity signal is a data string that is arranged in order according to the reception time of the reception intensity of the detected wave group received from the in-vehicle device 2. In other words, the received intensity signal is a data string that shows changes in received intensity in the received wave group in time series.
S265では、S260で生成した受信強度信号を第2の周波数を用いてRF送信部32から送信し、処理をS210へ移行させ、一連の処理を繰り返す。
In S265, the reception intensity signal generated in S260 is transmitted from the RF transmission unit 32 using the second frequency, the process proceeds to S210, and a series of processes is repeated.
[2-3.スマートエントリシステムとしての処理]
スマートエントリシステム1としては、一例として図4に示すように、車載機2(制御部15)及び携帯機3(携帯機制御部33)による処理が順次実行される。 [2-3. Processing as a smart entry system]
As an example, as shown in FIG. 4, thesmart entry system 1 sequentially executes processing by the in-vehicle device 2 (the control unit 15) and the portable device 3 (the portable device control unit 33).
スマートエントリシステム1としては、一例として図4に示すように、車載機2(制御部15)及び携帯機3(携帯機制御部33)による処理が順次実行される。 [2-3. Processing as a smart entry system]
As an example, as shown in FIG. 4, the
はじめに、車載機2はウェイクアップ信号を送信する(時刻t1)。携帯機3は、時刻t2においてウェイクアップ信号を受信する(時刻t2)と、ウェイクアップ状態に移行した後に、ACK信号を送信する(時刻t3)。車載機2は、携帯機3からACK信号を受信すると(時刻t4)、IDコードを送信する(時刻t5)。携帯機3は、送信されたIDコードが予め記録されたIDコードに等しい場合に、一致信号をコード応答信号として送信する(t7)。車載機2は、一致信号をコード応答信号として受信すると(t8)、検出波群を送信する(t9)。携帯機3は、検出波群を受信し、受信波群(t10)に基づいて生成した受信強度信号を送信する(t11)。車載機2は、携帯機3から受信強度信号を受信し(t12)、受信強度信号に基づいて携帯機3の位置を推定する。そして、車載機2は、推定した位置に応じた出力を制御対象部14に対して行う。
First, the in-vehicle device 2 transmits a wake-up signal (time t1). When the portable device 3 receives the wakeup signal at time t2 (time t2), the portable device 3 transmits an ACK signal after shifting to the wakeup state (time t3). When receiving the ACK signal from the portable device 3 (time t4), the in-vehicle device 2 transmits an ID code (time t5). The portable device 3 transmits a coincidence signal as a code response signal when the transmitted ID code is equal to the ID code recorded in advance (t7). When the in-vehicle device 2 receives the coincidence signal as a code response signal (t8), it transmits a detection wave group (t9). The portable device 3 receives the detection wave group and transmits a reception intensity signal generated based on the reception wave group (t10) (t11). The in-vehicle device 2 receives the reception intensity signal from the portable device 3 (t12), and estimates the position of the portable device 3 based on the reception intensity signal. And the vehicle equipment 2 performs the output according to the estimated position with respect to the control object part 14. FIG.
[3.作動]
次に、このように構成されたスマートエントリシステム1における車載機2の作動例について、図5~図10を用いて説明する。 [3. Operation]
Next, an operation example of the in-vehicle device 2 in the smart entry system 1 configured as described above will be described with reference to FIGS.
次に、このように構成されたスマートエントリシステム1における車載機2の作動例について、図5~図10を用いて説明する。 [3. Operation]
Next, an operation example of the in-
[3-1.第1作動例]
はじめに、強度パタン信号に基づいて、携帯機3の位置を推定する例を説明する。一例として示す図5(a)は、携帯機3がTアンテナ114に近い第1位置91(P1)に位置している例を示す図であり、図5(b)は、車載機2が送信する検出波群を示す図である。図5(c)は、図5(b)に示す検出波群を受信した携帯機3から送信された受信強度信号に基づいて生成された強度パタン信号を、説明のために横軸を時刻とし縦軸を受信強度として示した図(以下、強度パタン図という)である。 [3-1. First operation example]
First, an example in which the position of theportable device 3 is estimated based on the intensity pattern signal will be described. As an example, FIG. 5A is a diagram illustrating an example in which the portable device 3 is located at the first position 91 (P1) close to the T antenna 114, and FIG. It is a figure which shows the detection wave group to do. FIG. 5C shows an intensity pattern signal generated based on the received intensity signal transmitted from the portable device 3 that has received the detection wave group shown in FIG. It is the figure (henceforth an intensity | strength pattern diagram) which showed the vertical axis | shaft as reception intensity | strength.
はじめに、強度パタン信号に基づいて、携帯機3の位置を推定する例を説明する。一例として示す図5(a)は、携帯機3がTアンテナ114に近い第1位置91(P1)に位置している例を示す図であり、図5(b)は、車載機2が送信する検出波群を示す図である。図5(c)は、図5(b)に示す検出波群を受信した携帯機3から送信された受信強度信号に基づいて生成された強度パタン信号を、説明のために横軸を時刻とし縦軸を受信強度として示した図(以下、強度パタン図という)である。 [3-1. First operation example]
First, an example in which the position of the
図5(c)に示すように、携帯機3がTアンテナ114の近く(例えば第1位置91)に位置する場合には、Tアンテナ114から送信された検出波に対する受信波の受信強度は、他のアンテナから送信された検出波に対応する受信波の受信強度よりも大きい。そこで、制御部15は、受信強度信号に基づいて生成した強度パタン信号が、前述のような受信強度の大小関係を示す場合は、携帯機3の位置をTアンテナ114の近く、具体的にはトランクルームの近くであると推定する。
As shown in FIG. 5C, when the portable device 3 is located near the T antenna 114 (for example, the first position 91), the reception intensity of the received wave with respect to the detection wave transmitted from the T antenna 114 is It is larger than the reception intensity of the received wave corresponding to the detected wave transmitted from another antenna. Therefore, when the intensity pattern signal generated based on the received intensity signal indicates the magnitude relationship of the received intensity as described above, the control unit 15 sets the position of the portable device 3 near the T antenna 114, specifically, Presumed to be near the trunk room.
[3-2.第2作動例]
次に、強度パタン信号に基づいて、携帯機3の移動を推定する作動例を説明する。一例として示す図6(a)では、ドライバ席側の車両ドアはスライドドアであり、スライドドアの開閉状態に応じて、D席アンテナ112の位置が、開状態位置112a~閉状態位置112bのように変化する。図6(a)において、第2位置92(P2)は、車室外のスライドドア近くの位置を示し、第3位置93(P3)は車室内の位置を示す。図6(b)は、車載機2が送信する検出波群を示す図である。図6(c)は、図6(a)に示す第2位置92(ただし、車両ドアは開状態)、第3位置93(ただし、車両ドアは閉状態)、第2位置92(ただし、車両ドアは閉状態)のそれぞれに携帯機3が位置するときの強度パタン図の一例を示す図である。以下では、それぞれの強度パタン図を順に、第1パタン、第2パタン、第3パタンというものとする。図7は、第1パタン~第3パタンのように図示される信号が強度パタン信号及び前回強度パタン信号として取得された場合の、携帯機3の移動についての推定結果及び推定結果に基づく出力の一例を示す図である。 [3-2. Second operation example]
Next, an operation example for estimating the movement of theportable device 3 based on the intensity pattern signal will be described. In FIG. 6A shown as an example, the vehicle door on the driver's seat side is a slide door, and the position of the D seat antenna 112 is changed from an open state position 112a to a closed state position 112b according to the open / closed state of the slide door. To change. In FIG. 6A, a second position 92 (P2) indicates a position near the slide door outside the passenger compartment, and a third position 93 (P3) indicates a position in the passenger compartment. FIG. 6B is a diagram illustrating a detection wave group transmitted by the in-vehicle device 2. 6C shows the second position 92 (where the vehicle door is open), the third position 93 (where the vehicle door is closed), and the second position 92 (where the vehicle door is closed) shown in FIG. 6A. It is a figure which shows an example of an intensity | strength pattern diagram when the portable device 3 is located in each of a door (closed state). Hereinafter, the respective intensity pattern diagrams are referred to as a first pattern, a second pattern, and a third pattern in order. FIG. 7 shows the estimation results for the movement of the portable device 3 and the output based on the estimation results when signals illustrated as the first pattern to the third pattern are acquired as the intensity pattern signal and the previous intensity pattern signal. It is a figure which shows an example.
次に、強度パタン信号に基づいて、携帯機3の移動を推定する作動例を説明する。一例として示す図6(a)では、ドライバ席側の車両ドアはスライドドアであり、スライドドアの開閉状態に応じて、D席アンテナ112の位置が、開状態位置112a~閉状態位置112bのように変化する。図6(a)において、第2位置92(P2)は、車室外のスライドドア近くの位置を示し、第3位置93(P3)は車室内の位置を示す。図6(b)は、車載機2が送信する検出波群を示す図である。図6(c)は、図6(a)に示す第2位置92(ただし、車両ドアは開状態)、第3位置93(ただし、車両ドアは閉状態)、第2位置92(ただし、車両ドアは閉状態)のそれぞれに携帯機3が位置するときの強度パタン図の一例を示す図である。以下では、それぞれの強度パタン図を順に、第1パタン、第2パタン、第3パタンというものとする。図7は、第1パタン~第3パタンのように図示される信号が強度パタン信号及び前回強度パタン信号として取得された場合の、携帯機3の移動についての推定結果及び推定結果に基づく出力の一例を示す図である。 [3-2. Second operation example]
Next, an operation example for estimating the movement of the
ここで、例えば、第3パタンのように図示される信号が強度パタン信号(前回強度パタン信号)として取得され、その直後に、第2パタンのように図示される信号が新たな強度パタン信号として取得されたと仮定する。この場合、制御部15は、強度パタン信号と前回強度パタン信号とを比較して、P席アンテナ113から送信された検出波に対応する受信強度が増加していることから、車室外から車室内への携帯機3の移動を推定する。そして、一例として制御部15は、これらがスライドドアが閉状態のときの強度パタン信号であることに基づき、換言すれば、携帯機3を携帯するユーザが車室内に存在し且つスライドドアが閉状態であることに基づき、スライドドアを施錠する施錠指示をドア施錠機構へ出力する。
Here, for example, a signal illustrated as a third pattern is acquired as an intensity pattern signal (previous intensity pattern signal), and immediately thereafter, a signal illustrated as a second pattern is used as a new intensity pattern signal. Assume that it was acquired. In this case, the control unit 15 compares the intensity pattern signal with the previous intensity pattern signal, and the reception intensity corresponding to the detection wave transmitted from the P seat antenna 113 is increased. The movement of the portable device 3 to is estimated. As an example, the control unit 15 is based on the fact that these are intensity pattern signals when the sliding door is in a closed state. In other words, the user carrying the portable device 3 exists in the vehicle compartment and the sliding door is closed. Based on the state, a locking instruction for locking the sliding door is output to the door locking mechanism.
一方、例えば、第3パタンのように図示される信号が強度パタン信号(前回強度パタン信号)として取得され、その直後に、第1パタンのように図示される信号が新たな強度パタン信号として取得されたと仮定する。この場合、制御部15は、強度パタン信号と前回強度パタン信号とを比較して、携帯機3の移動は無いと推定すると共に、スライドドアが閉状態から開状態になったと推定する。そして、一例として制御部15は、スライドドアが開状態となったことをスピーカにより報知するための報知指示を出力する。
On the other hand, for example, a signal illustrated as a third pattern is acquired as an intensity pattern signal (previous intensity pattern signal), and immediately thereafter, a signal illustrated as a first pattern is acquired as a new intensity pattern signal. Suppose that In this case, the control unit 15 compares the intensity pattern signal with the previous intensity pattern signal and estimates that the portable device 3 has not moved, and also estimates that the slide door has changed from the closed state to the open state. And as an example, the control part 15 outputs the alerting | reporting instruction | indication for alert | reporting with a speaker that the sliding door was in the open state.
また、例えば、第2パタンのように図示される信号が強度パタン信号(前回強度パタン信号)として取得され、その直後に、第1パタンのように図示される信号が新たな強度パタン信号として取得されたと仮定する。この場合、制御部15は、強度パタン信号と前回強度パタン信号とを比較して、車室内から車室外への携帯機3の移動を推定する。そして、一例として制御部15は、スライドドアの開状態を保持するための開状態保持指示を出力する。
Further, for example, a signal illustrated as a second pattern is acquired as an intensity pattern signal (previous intensity pattern signal), and immediately thereafter, a signal illustrated as a first pattern is acquired as a new intensity pattern signal. Suppose that In this case, the control unit 15 estimates the movement of the portable device 3 from the vehicle interior to the vehicle interior by comparing the intensity pattern signal with the previous intensity pattern signal. And as an example, the control part 15 outputs the open state holding | maintenance instruction | indication for hold | maintaining the open state of a slide door.
なお、携帯機3の移動が無いと推定された場合は、携帯機3の推定位置を制御対象部14へ出力し、制御対象部14における処理において携帯機3の推定位置を利用するようにしてもよい。
When it is estimated that there is no movement of the portable device 3, the estimated position of the portable device 3 is output to the control target unit 14, and the estimated position of the portable device 3 is used in the processing in the control target unit 14. Also good.
[3-3.第3作動例]
次に、強度パタン信号に基づいて、携帯機3の移動を推定する別の作動例を説明する。一例として示す図8(a)において、前述と同様に、第1位置93はTアンテナ114に近い車室外の位置を示し、第2位置92は、車両ドアが閉じた状態のD席アンテナ112に近い車室外の位置を示す。図8(b)は、車載機2が送信する検出波群を示す図である。図8(c)は、図8(a)に示す第2位置(ただし、車両ドアは閉状態)、第1位置のそれぞれに携帯機3が位置するときの強度パタン図の一例を示す図である。以下では、それぞれの強度パタン図を順に、第4パタン、第5パタンというものとする。図9は、第4パタン~第5パタンのように図示される信号が強度パタン信号及び前回強度パタン信号としてそれぞれ取得された場合の、携帯機3の移動についての推定結果及び推定結果に伴う出力、の一例を示す図である。 [3-3. Third operation example]
Next, another operation example for estimating the movement of theportable device 3 based on the intensity pattern signal will be described. In FIG. 8A as an example, as described above, the first position 93 indicates a position outside the passenger compartment close to the T antenna 114, and the second position 92 corresponds to the D seat antenna 112 with the vehicle door closed. Indicates the location outside the vehicle compartment. FIG. 8B is a diagram illustrating a detection wave group transmitted by the in-vehicle device 2. FIG. 8C is a diagram showing an example of an intensity pattern diagram when the portable device 3 is located at each of the second position (where the vehicle door is closed) and the first position shown in FIG. is there. Hereinafter, the intensity pattern diagrams are referred to as a fourth pattern and a fifth pattern, respectively. FIG. 9 shows the estimated result of the movement of the portable device 3 and the output accompanying the estimated result when the signals illustrated as the fourth pattern to the fifth pattern are acquired as the intensity pattern signal and the previous intensity pattern signal, respectively. FIG.
次に、強度パタン信号に基づいて、携帯機3の移動を推定する別の作動例を説明する。一例として示す図8(a)において、前述と同様に、第1位置93はTアンテナ114に近い車室外の位置を示し、第2位置92は、車両ドアが閉じた状態のD席アンテナ112に近い車室外の位置を示す。図8(b)は、車載機2が送信する検出波群を示す図である。図8(c)は、図8(a)に示す第2位置(ただし、車両ドアは閉状態)、第1位置のそれぞれに携帯機3が位置するときの強度パタン図の一例を示す図である。以下では、それぞれの強度パタン図を順に、第4パタン、第5パタンというものとする。図9は、第4パタン~第5パタンのように図示される信号が強度パタン信号及び前回強度パタン信号としてそれぞれ取得された場合の、携帯機3の移動についての推定結果及び推定結果に伴う出力、の一例を示す図である。 [3-3. Third operation example]
Next, another operation example for estimating the movement of the
ここで、例えば、第4パタンのように図示される信号が強度パタン信号(前回強度パタン信号)として取得され、その直後に、第5パタンのように図示される信号が新たな強度パタン信号として取得されたと仮定する。この場合、制御部15は、強度パタン信号と前回強度パタン信号とを比較して、車両ドア付近からトランクルーム付近への携帯機3の移動を推定する。そして、一例として制御部15は、この後、トランクルーム付近の位置が携帯機3の推定位置として所定期間以上検出される場合は、トランクルームを解錠するトランクルーム解錠指示を出力する。
Here, for example, a signal illustrated as a fourth pattern is acquired as an intensity pattern signal (previous intensity pattern signal), and immediately thereafter, a signal illustrated as a fifth pattern is used as a new intensity pattern signal. Assume that it was acquired. In this case, the control unit 15 compares the intensity pattern signal with the previous intensity pattern signal, and estimates the movement of the portable device 3 from the vicinity of the vehicle door to the vicinity of the trunk room. For example, when the position near the trunk room is detected as the estimated position of the portable device 3 for a predetermined period or longer, the control unit 15 outputs a trunk room unlocking instruction for unlocking the trunk room.
一方、例えば、第5パタンのように図示される信号が強度パタン信号(前回強度パタン信号)として取得され、その直後に、第4パタンのように図示される信号が新たな強度パタン信号として取得されたと仮定する。この場合、制御部15は、強度パタン信号と前回強度パタン信号とを比較して、トランクルーム付近から車両ドア付近への携帯機3の移動を推定する。そして、一例として制御部15は、例えばトランクルームが解錠状態である場合、トランクルームを施錠する内容のメッセージを伝える報知をスピーカにより行う報知指示を出力する。
On the other hand, for example, a signal illustrated as a fifth pattern is acquired as an intensity pattern signal (previous intensity pattern signal), and immediately thereafter, a signal illustrated as a fourth pattern is acquired as a new intensity pattern signal. Suppose that In this case, the control unit 15 compares the intensity pattern signal with the previous intensity pattern signal, and estimates the movement of the portable device 3 from the vicinity of the trunk room to the vicinity of the vehicle door. For example, when the trunk room is in an unlocked state, the control unit 15 outputs a notification instruction for performing notification with a speaker that conveys a message that locks the trunk room.
なお、制御部15は、携帯機3の移動が無いと推定された場合は、前述のように携帯機3の推定位置を制御対象部14へ出力してもよく、または、そのときのトランクルームの状態(解錠状態または施錠状態)を保持する指示を出力してもよい。
When it is estimated that the portable device 3 is not moved, the control unit 15 may output the estimated position of the portable device 3 to the control target unit 14 as described above, or the trunk room at that time An instruction to hold the state (unlocked state or locked state) may be output.
[3-4.第4作動例]
次に、強度パタン信号に基づいて、携帯機3の移動を推定する別の作動例を説明する。一例として示す図10(a)では、ドライバ席側の車両ドアはヒンジにより開閉するように構成されており、車両ドアの開閉状態に応じて、D席アンテナ112の位置が閉状態位置112c~開状態位置112dのように変化する。図10(a)において、第4位置94(P4)は、車両ドア後方の車室外の位置を示す。図10(b)は、車載機2が送信する検出波群を示す図である。図10(c)は、図10(a)に示す第4位置に携帯機3が位置するとき、車両ドアが閉状態及び開状態である場合の強度パタン図の一例を示す図である。以下では、それぞれの強度パタン図を順に、第6パタン、第7パタンというものとする。 [3-4. Fourth operation example]
Next, another operation example for estimating the movement of theportable device 3 based on the intensity pattern signal will be described. In FIG. 10A as an example, the vehicle door on the driver's seat side is configured to be opened and closed by a hinge, and the position of the D seat antenna 112 is changed from the closed state position 112c to the open state according to the open / close state of the vehicle door. It changes like the state position 112d. In FIG. 10A, a fourth position 94 (P4) indicates a position outside the passenger compartment behind the vehicle door. FIG. 10B is a diagram illustrating a detection wave group transmitted by the in-vehicle device 2. FIG.10 (c) is a figure which shows an example of an intensity | strength pattern diagram in case a vehicle door is a closed state and an open state, when the portable device 3 is located in the 4th position shown to Fig.10 (a). Hereinafter, the intensity pattern diagrams will be referred to as a sixth pattern and a seventh pattern, respectively.
次に、強度パタン信号に基づいて、携帯機3の移動を推定する別の作動例を説明する。一例として示す図10(a)では、ドライバ席側の車両ドアはヒンジにより開閉するように構成されており、車両ドアの開閉状態に応じて、D席アンテナ112の位置が閉状態位置112c~開状態位置112dのように変化する。図10(a)において、第4位置94(P4)は、車両ドア後方の車室外の位置を示す。図10(b)は、車載機2が送信する検出波群を示す図である。図10(c)は、図10(a)に示す第4位置に携帯機3が位置するとき、車両ドアが閉状態及び開状態である場合の強度パタン図の一例を示す図である。以下では、それぞれの強度パタン図を順に、第6パタン、第7パタンというものとする。 [3-4. Fourth operation example]
Next, another operation example for estimating the movement of the
ここで、例えば、第6パタンのように図示される信号が強度パタン信号(前回強度パタン信号)として取得され、その後に、第7パタンのように図示される信号が新たな強度パタン信号として取得されたと仮定する。制御部15は、第6パタンのように図示される強度パタン信号を取得すると、第4位置94を携帯機3の位置として推定し、車両ドアを自動で開ける指示をドア開閉機構へ出力する。車両ドアが開き始めると、D席アンテナ112及びP席アンテナ113から送信された検出波に対応する受信波の受信強度は増加する。そこで、制御部15は、第7パタンのように図示される信号が強度パタン信号として取得されると、携帯機3の移動が無いと推定すると共に、D席アンテナ112及びP席アンテナ113から送信された検出波に対応する受信波の受信強度が予め定められた近接検知レベルよりを超えた場合には、車両ドアをそれ以上自動で開けない指示をドア開閉機構へ出力する。
Here, for example, a signal illustrated as a sixth pattern is acquired as an intensity pattern signal (previous intensity pattern signal), and then a signal illustrated as a seventh pattern is acquired as a new intensity pattern signal. Suppose that When acquiring the intensity pattern signal illustrated as the sixth pattern, the control unit 15 estimates the fourth position 94 as the position of the portable device 3 and outputs an instruction to automatically open the vehicle door to the door opening / closing mechanism. When the vehicle door starts to open, the reception intensity of the reception wave corresponding to the detection wave transmitted from the D seat antenna 112 and the P seat antenna 113 increases. Therefore, when the signal illustrated as the seventh pattern is acquired as the intensity pattern signal, the control unit 15 estimates that the portable device 3 does not move and transmits from the D seat antenna 112 and the P seat antenna 113. When the received intensity of the received wave corresponding to the detected wave exceeds a predetermined proximity detection level, an instruction to automatically open the vehicle door is output to the door opening / closing mechanism.
なお、第1作動例~第4作動例において、制御部15は、上述のように、強度パタン信号における送信アンテナ112~114毎の受信波の受信強度の大小関係に基づいて携帯機3の位置を推定してもよいし、予めROM52に記録された基本パタン信号と、受信強度信号に基づいて生成された強度パタン信号との比較に基づいて携帯機3の位置を推定してもよい。後者の場合、例えば作動例1において、制御部15は、図5(c)のように図示される信号を基本位置が第1位置91である基本パタン信号としてROM52に記録しておき、受信強度信号に基づいて生成された強度パタンと基本パタン信号の比較に基づいて、携帯機3の位置を推定してもよい。
In the first operation example to the fourth operation example, as described above, the control unit 15 determines the position of the portable device 3 based on the magnitude relationship between the reception strengths of the reception waves of the transmission antennas 112 to 114 in the intensity pattern signal. May be estimated, or the position of the portable device 3 may be estimated based on a comparison between a basic pattern signal recorded in advance in the ROM 52 and an intensity pattern signal generated based on the received intensity signal. In the latter case, for example, in the operation example 1, the control unit 15 records the signal illustrated in FIG. 5C in the ROM 52 as a basic pattern signal whose basic position is the first position 91, and receives the reception intensity. The position of the portable device 3 may be estimated based on a comparison between the intensity pattern generated based on the signal and the basic pattern signal.
[4.効果]
以上詳述した実施形態によれば、以下の効果が得られる。 [4. effect]
According to the embodiment detailed above, the following effects can be obtained.
以上詳述した実施形態によれば、以下の効果が得られる。 [4. effect]
According to the embodiment detailed above, the following effects can be obtained.
[4A]D席アンテナ112、P席アンテナ113、Tアンテナ114からは予め定められた等しい強度の検出波が送信されるため、検出波が携帯機3により受信されたときの受信強度は、送信アンテナ112~114に対する携帯機3の位置に応じて異なる。強度パタン信号は送信アンテナ112~114のうち選択された送信アンテナからの検出波にそれぞれ対応する受信波の受信強度を示す信号である。このため、選択された送信アンテナ毎の受信波の受信強度の大小関係に基づいて、それぞれの送信アンテナに対する携帯機3がとり得る位置が特定される。これにより、携帯機3の位置が推定される。これによれば、強度パタン信号に基づいて携帯機3の位置を推定可能であるため、検出したい領域の数に応じて送信アンテナの数を増加させる必要がある従来技術よりも、少ない数の送信アンテナで、すなわち簡易な構成で、携帯装置の位置を精度よく推定することができる。
[4A] Since a detection wave having a predetermined equal intensity is transmitted from the D seat antenna 112, the P seat antenna 113, and the T antenna 114, the reception intensity when the detection wave is received by the portable device 3 is transmitted. The position varies depending on the position of the portable device 3 with respect to the antennas 112 to 114. The intensity pattern signal is a signal indicating the reception intensity of the reception wave corresponding to the detection wave from the transmission antenna selected from among the transmission antennas 112 to 114. For this reason, the position which the portable device 3 can take with respect to each transmission antenna is specified based on the magnitude relation of the reception intensity of the reception wave for each selected transmission antenna. Thereby, the position of the portable device 3 is estimated. According to this, since the position of the portable device 3 can be estimated based on the intensity pattern signal, the number of transmissions is smaller than that in the conventional technique in which the number of transmission antennas needs to be increased according to the number of regions to be detected. With the antenna, that is, with a simple configuration, the position of the portable device can be accurately estimated.
また、送信アンテナ112~114からは予め定められた強度の検出波が送信される。これによれば、送信アンテナ毎に異なる形式で検出信号を送信する必要がある従来技術よりも、簡易な構成で、携帯機3の位置を精度よく推定することができる。
In addition, a detection wave having a predetermined intensity is transmitted from the transmission antennas 112 to 114. According to this, it is possible to accurately estimate the position of the portable device 3 with a simpler configuration than the conventional technique that needs to transmit detection signals in different formats for each transmission antenna.
[4B]制御部15は、強度パタン信号の時間の経過に伴う変化に基づいて、携帯機3の移動を推定してもよい。これによれば、簡易な構成で、携帯機3の移動を推定することができる。
[4B] The control unit 15 may estimate the movement of the portable device 3 based on a change with time of the intensity pattern signal. According to this, the movement of the portable device 3 can be estimated with a simple configuration.
[4C]送信アンテナ112~114は、車室内及び車室外の両方に通信範囲を有してもよい。これによれば、少ない数の送信アンテナによって、強度パタン信号に基づく携帯機3の位置推定を行うことができる。この結果、車載機2、及びスマートエントリシステム1を簡易に構成することができる。
[4C] The transmission antennas 112 to 114 may have a communication range both inside and outside the vehicle interior. According to this, the position of the portable device 3 can be estimated based on the intensity pattern signal with a small number of transmission antennas. As a result, the in-vehicle device 2 and the smart entry system 1 can be easily configured.
[4D]制御部15は、予め定められたアンテナ選択期間毎に、送信アンテナ112~114を基本順序に従って選択し、検出波を送信してもよい。これによれば、受信波群または受信強度信号において、該アンテナ選択期間に基づくサンプリングを行うことによって、送信アンテナ112~114から送信された検出波に対応するそれぞれの受信波の特定を容易に行うことができる。この結果、携帯機3の位置を精度よく推定することができる。
[4D] The control unit 15 may select the transmission antennas 112 to 114 in accordance with the basic order for each predetermined antenna selection period and transmit the detection wave. According to this, by performing sampling based on the antenna selection period in the received wave group or the received intensity signal, each received wave corresponding to the detected wave transmitted from the transmitting antennas 112 to 114 can be easily identified. be able to. As a result, the position of the portable device 3 can be estimated with high accuracy.
[4E]基本順序は、送信アンテナ112~114を一巡するように、すなわち、全ての送信アンテナが1回ずつ選択されるように定められていてもよい。これによれば、基本順序が送信アンテナ112~114を一巡するように定められていない場合よりも、すなわち、基本順序が例えばD席アンテナ112とP席アンテナ113とのみが複数回ずつ選択されるように定められている場合よりも、携帯機3の位置を精度よく推定することができる。
[4E] The basic order may be determined so as to go around the transmission antennas 112 to 114, that is, all the transmission antennas are selected once. According to this, compared with the case where the basic order is not determined to make a round of the transmission antennas 112 to 114, that is, only the D seat antenna 112 and the P seat antenna 113 are selected multiple times, for example. Thus, the position of the portable device 3 can be estimated with higher accuracy than the case where it is determined as described above.
[4F]制御部15は、基本順序に従って検出波を送信する手順を基本手順として、この基本手順を複数回(上記実施形態では3回)繰り返して検出波群を送信してもよい。これによれば、雑音等に対する耐性を向上させることができる。この結果、携帯機3の位置を精度よく推定することができる。
[4F] The control unit 15 may transmit the detection wave group by repeating this basic procedure a plurality of times (three times in the above embodiment), with the procedure of transmitting the detection wave according to the basic order as a basic procedure. According to this, tolerance to noise or the like can be improved. As a result, the position of the portable device 3 can be estimated with high accuracy.
[4G]ROM52は、送信アンテナ112~114の通信範囲における予め定められた基本位置に携帯機3が位置するときの強度パタン信号を基本パタン信号として予め記録していてもよい。また、制御部15は、取得した強度パタン信号と基本パタン信号との比較に基づいて、携帯機3が基本位置に位置するか否かを判断してもよい。これによれば、種々の基本位置に対する基本パタン信号をROM52に記録しておくことにより、これらの基本パタン信号に基づいて、少ない数のアンテナ数で、携帯機3の位置を精度よく推定することができる。
The [4G] ROM 52 may previously record an intensity pattern signal when the portable device 3 is located at a predetermined basic position in the communication range of the transmission antennas 112 to 114 as a basic pattern signal. Further, the control unit 15 may determine whether or not the portable device 3 is located at the basic position based on the comparison between the acquired intensity pattern signal and the basic pattern signal. According to this, by recording basic pattern signals for various basic positions in the ROM 52, it is possible to accurately estimate the position of the portable device 3 with a small number of antennas based on these basic pattern signals. Can do.
[4H]制御部15は、推定された携帯機3の位置に応じた出力を行ってもよい。これによれば、携帯機3を携帯するユーザの位置に応じて、例えば、車両ドアの開閉操作やトランクルームドアの施解錠操作等の各種制御を適切に行うことができる。
[4H] The control unit 15 may perform output in accordance with the estimated position of the portable device 3. According to this, according to the position of the user carrying the portable device 3, various controls such as opening / closing operation of the vehicle door and locking / unlocking operation of the trunk room door can be appropriately performed.
[4I]制御部15は、推定された携帯機3の移動に応じた出力を行ってもよい。これによれば、携帯機3を携帯するユーザの種々の移動状況に応じて、より詳細な各種制御を行うことができる。
[4I] The control unit 15 may perform output according to the estimated movement of the portable device 3. According to this, various detailed control can be performed according to various movement situations of the user carrying the portable device 3.
なお、第1実施形態では、車載機2が位置推定装置の一例に相当し、携帯機3が携帯装置の一例に相当し、送信アンテナ112~114が検出アンテナの一例に相当し、制御部15が、送信部、受信部、位置推定部、出力部、移動推定部としての一例に相当し、ROM52が記録部としての一例に相当する。また、S135が送信部としての処理の一例に相当し、S140が受信部としての処理の一例に相当し、S150が位置推定部としての処理の一例に相当し、S165が出力部としての処理の一例に相当し、S160が移動推定部としての処理の一例に相当する。
In the first embodiment, the in-vehicle device 2 corresponds to an example of a position estimation device, the portable device 3 corresponds to an example of a portable device, the transmission antennas 112 to 114 correspond to an example of a detection antenna, and the control unit 15 Is equivalent to an example as a transmission unit, a reception unit, a position estimation unit, an output unit, and a movement estimation unit, and the ROM 52 is equivalent to an example as a recording unit. S135 corresponds to an example of processing as a transmission unit, S140 corresponds to an example of processing as a reception unit, S150 corresponds to an example of processing as a position estimation unit, and S165 corresponds to an example of processing as an output unit. This corresponds to an example, and S160 corresponds to an example of processing as a movement estimation unit.
[5.他の実施形態]
以上、本開示の実施形態について説明したが、本開示は、上記実施形態に限定されることなく、種々の形態を採り得ることは言うまでもない。 [5. Other Embodiments]
As mentioned above, although embodiment of this indication was described, it cannot be overemphasized that this indication can take various forms, without being limited to the above-mentioned embodiment.
以上、本開示の実施形態について説明したが、本開示は、上記実施形態に限定されることなく、種々の形態を採り得ることは言うまでもない。 [5. Other Embodiments]
As mentioned above, although embodiment of this indication was described, it cannot be overemphasized that this indication can take various forms, without being limited to the above-mentioned embodiment.
[5A]上記実施形態では、第1の周波数により車載機2から検出波が送信されていたが、検出波の周波数はこれに限るものではない。例えば、選択される送信アンテナ112~114ごとに、異なる周波数で検出波を送信してもよい。
[5A] In the above embodiment, the detection wave is transmitted from the vehicle-mounted device 2 using the first frequency, but the frequency of the detection wave is not limited to this. For example, detection waves may be transmitted at different frequencies for each of the selected transmission antennas 112 to 114.
[5B]携帯機3から車載機2へ送信される受信強度信号は、受信波群における受信強度を時系列に並べた信号であったが、これに限るものではない。例えば、受信強度信号は、受信波群における、それぞれの受信波ごとの受信強度を示す信号であってもよい。すなわち、携帯機3において、受信波群における受信強度を、選択された送信アンテナ毎にから送信された前記検出波にそれぞれ対応する前記携帯装置による受信波ごとの受信強度を示す信号を生成し、これを受信強度信号として車載機2へ送信してもよい。
[5B] The received intensity signal transmitted from the portable device 3 to the in-vehicle device 2 is a signal in which the received intensity in the received wave group is arranged in time series, but is not limited thereto. For example, the received intensity signal may be a signal indicating the received intensity for each received wave in the received wave group. That is, in the portable device 3, the reception intensity in the reception wave group is generated as a signal indicating the reception intensity for each reception wave by the portable device corresponding to the detection wave transmitted from each selected transmission antenna, You may transmit this to the vehicle equipment 2 as a received intensity signal.
[5C]上記実施形態に示した作動例は一例に過ぎず、強度パタン信号に基づいて、携帯機3を携帯するユーザの種々の動きや、送信アンテナが設置された車両各部の種々の動きを検出してよい。例えば、制御部15は、携帯機3を携帯するユーザが車両に乗り込もうとしている途中であることを示す強度パタン信号が検出されたら、車両ドアを閉じる作動を中止する指示をドア開閉機構に出力してもよい。
[5C] The operation example shown in the above embodiment is merely an example. Based on the intensity pattern signal, various movements of the user carrying the portable device 3 and various movements of each part of the vehicle in which the transmission antenna is installed are shown. May be detected. For example, when a strength pattern signal indicating that the user carrying the portable device 3 is about to get into the vehicle is detected, the control unit 15 outputs an instruction to stop the operation of closing the vehicle door to the door opening / closing mechanism. May be.
[5D]上記実施形態における1つの構成要素が有する機能を複数の構成要素として分散させたり、複数の構成要素が有する機能を1つの構成要素に統合したりしてもよい。また、上記実施形態の構成の一部を、同様の機能を有する公知の構成に置き換えてもよい。また、上記実施形態の構成の一部を、課題を解決できる限りにおいて省略してもよい。また、上記実施形態の構成の少なくとも一部を、他の上記実施形態の構成に対して付加、置換等してもよい。なお、請求の範囲に記載の文言から特定される技術思想に含まれるあらゆる態様が本開示の実施形態である。
[5D] The functions of one component in the above embodiment may be distributed as a plurality of components, or the functions of a plurality of components may be integrated into one component. Moreover, you may replace a part of structure of the said embodiment with the well-known structure which has the same function. Moreover, you may abbreviate | omit a part of structure of the said embodiment as long as a subject can be solved. In addition, at least a part of the configuration of the above embodiment may be added to or replaced with the configuration of the other embodiment. In addition, all the aspects included in the technical idea specified from the wording described in the claims are embodiments of the present disclosure.
[5G]本開示は、前述したスマートエントリシステム1、車載機2、制御部15、携帯機3、携帯機制御部33の他、制御部15を機能させるためのプログラム、このプログラムを記録した媒体、携帯機制御部33を機能させるためのプログラム、このプログラムを記録した媒体、位置推定方法など、種々の形態で実現することができる。
[5G] The present disclosure includes the smart entry system 1, the in-vehicle device 2, the control unit 15, the portable device 3, the portable device control unit 33, a program for causing the control unit 15 to function, and a medium storing the program It can be realized in various forms such as a program for causing the portable device control unit 33 to function, a medium on which the program is recorded, and a position estimation method.
この出願に記載されるフローチャート、あるいは、フローチャートの処理は、複数のセクション(あるいはステップと言及される)から構成され、各セクションは、例えば、S100と表現される。さらに、各セクションは、複数のサブセクションに分割されることができる、一方、複数のセクションが合わさって一つのセクションにすることも可能である。さらに、このように構成される各セクションは、デバイス、モジュール、ミーンズとして言及されることができる。
The flowchart described in this application or the process of the flowchart is composed of a plurality of sections (or referred to as steps), and each section is expressed as, for example, S100. Further, each section can be divided into a plurality of subsections, while a plurality of sections can be combined into one section. Further, each section configured in this manner can be referred to as a device, module, or means.
Claims (9)
- 車両に搭載され、ユーザに携帯される携帯装置(3)の位置を推定する位置推定装置であって、
予め定められた通信範囲を有し、車両における異なる設置位置に設けられた複数の検出アンテナ(112~114)と、
送信する時間帯が重ならないように前記検出アンテナを1つずつ予め定められた基本順序に従って選択し、選択された前記検出アンテナを介して、予め定められた強度の検出波を送信する送信部(15、S135)と、
前記送信部によって送信された前記検出波を検出波群とし、前記携帯装置により受信された前記検出波群を受信波群とし、前記受信波群において前記選択された検出アンテナ毎の前記検出波の受信強度を示す信号を強度パタン信号として、前記強度パタン信号における前記検出アンテナ毎の受信強度に基づいて、前記携帯装置の位置を推定する位置推定部(15、S150)と、
を備える位置推定装置。 A position estimation device that estimates the position of a mobile device (3) that is mounted on a vehicle and carried by a user,
A plurality of detection antennas (112 to 114) having a predetermined communication range and provided at different installation positions in the vehicle;
A transmitting unit that selects the detection antennas one by one in accordance with a predetermined basic order so that transmission time zones do not overlap each other, and transmits a detection wave having a predetermined intensity via the selected detection antennas ( 15, S135)
The detection wave transmitted by the transmission unit is a detection wave group, the detection wave group received by the portable device is a reception wave group, and the detection wave of each detection antenna selected in the reception wave group A position estimation unit (15, S150) that estimates a position of the portable device based on a reception intensity of each detection antenna in the intensity pattern signal, using a signal indicating reception intensity as an intensity pattern signal;
A position estimation apparatus comprising: - 請求項1に記載の位置推定装置であって、
前記強度パタン信号の時間の経過に伴う変化に基づいて、前記携帯装置の移動を推定する移動推定部(15、S160)を備える位置推定装置。 The position estimation apparatus according to claim 1,
A position estimation apparatus comprising a movement estimation unit (15, S160) for estimating movement of the portable device based on a change of the intensity pattern signal with time. - 請求項1または請求項2に記載の位置推定装置であって、
前記検出アンテナは、車室内及び車室外の両方に通信範囲を有する位置推定装置。 The position estimation device according to claim 1 or 2,
The detection antenna is a position estimation device having a communication range both inside and outside the vehicle. - 請求項1から請求項3のいずれか一項に記載の位置推定装置であって、
前記送信部は、予め定められたアンテナ選択期間毎に、前記検出アンテナを前記基本順序に従って選択する位置推定装置。 The position estimation device according to any one of claims 1 to 3,
The transmission unit is a position estimation device that selects the detection antennas according to the basic order for each predetermined antenna selection period. - 請求項1から請求項4のいずれか一項に記載の位置推定装置であって、
前記基本順序は、前記複数の検出アンテナを一巡するように定められる位置推定装置。 The position estimation device according to any one of claims 1 to 4,
The position estimation device in which the basic order is determined so as to make a round of the plurality of detection antennas. - 請求項1から請求項5のいずれか一項に記載の位置推定装置であって、
前記基本順序を複数回繰り返すことにより送信された前記検出波を前記検出波群とする位置推定装置。 The position estimation device according to any one of claims 1 to 5,
A position estimation device that uses the detected waves transmitted by repeating the basic order a plurality of times as the detected wave group. - 請求項1から請求項6のいずれか一項に記載の位置推定装置であって、
前記複数の検出アンテナの前記通信範囲における予め定められた基本位置に前記携帯装置が位置するときの前記強度パタン信号を基本パタン信号として予め記録している記録部(52)を備え、
前記位置推定部は、前記強度パタン信号と前記基本パタン信号との比較に基づいて、前記携帯装置が前記基本位置に位置するか否かを判断する位置推定装置。 The position estimation device according to any one of claims 1 to 6,
A recording unit (52) that pre-records the intensity pattern signal as a basic pattern signal when the portable device is positioned at a predetermined basic position in the communication range of the plurality of detection antennas;
The position estimation unit is configured to determine whether or not the portable device is located at the basic position based on a comparison between the intensity pattern signal and the basic pattern signal. - 請求項1から請求項7のいずれか一項に記載の位置推定装置であって、
前記位置推定部により推定された前記携帯装置の位置に応じた出力を行う第1の出力部(15、S165)を備える位置推定装置。 The position estimation device according to any one of claims 1 to 7,
A position estimation apparatus provided with the 1st output part (15, S165) which performs the output according to the position of the said portable apparatus estimated by the said position estimation part. - 請求項2から請求項8のいずれか一項に記載の位置推定装置であって、
前記移動推定部により推定された前記携帯装置の移動に応じた出力を行う第2の出力部(15、S165)を備える位置推定装置。
The position estimation device according to any one of claims 2 to 8,
A position estimation apparatus provided with the 2nd output part (15, S165) which performs the output according to the movement of the said portable apparatus estimated by the said movement estimation part.
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2014-266100 | 2014-12-26 | ||
| JP2014266100A JP6483436B2 (en) | 2014-12-26 | 2014-12-26 | Position estimation device |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2016103664A1 true WO2016103664A1 (en) | 2016-06-30 |
Family
ID=56149727
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2015/006303 WO2016103664A1 (en) | 2014-12-26 | 2015-12-17 | Position estimating device |
Country Status (2)
| Country | Link |
|---|---|
| JP (1) | JP6483436B2 (en) |
| WO (1) | WO2016103664A1 (en) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10604259B2 (en) | 2016-01-20 | 2020-03-31 | Amsafe, Inc. | Occupant restraint systems having extending restraints, and associated systems and methods |
| JP6697783B2 (en) * | 2017-03-15 | 2020-05-27 | 株式会社デンソー | Mobile terminal position detection device |
| JP6780570B2 (en) * | 2017-04-07 | 2020-11-04 | 株式会社Soken | Vehicle system equipment and vehicle system |
| EP3477600B1 (en) * | 2017-10-27 | 2020-02-26 | Axis AB | A method for controlling access in a system comprising a portable device associated with a user and an access control device |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11295409A (en) * | 1998-04-09 | 1999-10-29 | Locus:Kk | Positioning system |
| JP2003219485A (en) * | 2002-01-23 | 2003-07-31 | Mitsubishi Electric Corp | Household electric apparatus control system and controller, household electric apparatus and remote controller |
| JP2008266955A (en) * | 2007-04-19 | 2008-11-06 | Alps Electric Co Ltd | Keyless entry system |
| JP2009127336A (en) * | 2007-11-26 | 2009-06-11 | Toyota Motor Corp | Opening/closing body controller |
Family Cites Families (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP2009250627A (en) * | 2008-04-01 | 2009-10-29 | Mitsubishi Electric Corp | Sensor position locating method |
| US9313669B2 (en) * | 2012-08-30 | 2016-04-12 | Lg Electronics Inc. | Apparatus and method for calculating location of mobile station in wireless network |
| JP6107267B2 (en) * | 2013-03-18 | 2017-04-05 | 株式会社日本自動車部品総合研究所 | Vehicle system, in-vehicle device, and portable device |
| JP6196814B2 (en) * | 2013-06-04 | 2017-09-13 | 株式会社Soken | In-vehicle device control system |
-
2014
- 2014-12-26 JP JP2014266100A patent/JP6483436B2/en not_active Expired - Fee Related
-
2015
- 2015-12-17 WO PCT/JP2015/006303 patent/WO2016103664A1/en active Application Filing
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH11295409A (en) * | 1998-04-09 | 1999-10-29 | Locus:Kk | Positioning system |
| JP2003219485A (en) * | 2002-01-23 | 2003-07-31 | Mitsubishi Electric Corp | Household electric apparatus control system and controller, household electric apparatus and remote controller |
| JP2008266955A (en) * | 2007-04-19 | 2008-11-06 | Alps Electric Co Ltd | Keyless entry system |
| JP2009127336A (en) * | 2007-11-26 | 2009-06-11 | Toyota Motor Corp | Opening/closing body controller |
Also Published As
| Publication number | Publication date |
|---|---|
| JP6483436B2 (en) | 2019-03-13 |
| JP2016125884A (en) | 2016-07-11 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US9894492B1 (en) | System and method for determining mobile device location relative to vehicle cabin | |
| US6906612B2 (en) | System and method for vehicle passive entry having inside/outside detection | |
| US9811961B2 (en) | Vehicular near field communication system, portable device, and on-board instrument | |
| US8659388B2 (en) | Variable strength wireless communication system | |
| US9126564B2 (en) | Communication apparatus for vehicle | |
| WO2016103664A1 (en) | Position estimating device | |
| EP1547879A2 (en) | Vehicular remote control system and tire pressure monitoring system | |
| JP6107267B2 (en) | Vehicle system, in-vehicle device, and portable device | |
| US20140368313A1 (en) | Vehicle keyfob with accelerometer to extend battery life | |
| JP2004150124A (en) | Remote control system for vehicle | |
| US9396597B2 (en) | Smart entry system | |
| CN113993755B (en) | Method and device for remote control of safety functions of a motor vehicle by means of a mobile communication terminal | |
| US9889819B2 (en) | Smart key system | |
| US20080143478A1 (en) | Mobile unit and electronic key system using the same | |
| US20110298580A1 (en) | In-vehicle device control system | |
| JP2008014095A (en) | Keyless device for vehicle | |
| JP2010147838A (en) | Keyless entry system | |
| JP6498229B2 (en) | Vehicle door control device | |
| JP2008121254A (en) | Automatic unlocking method of vehicle keyless device | |
| JP5135921B2 (en) | Smart keyless entry system | |
| JP2007009468A (en) | Keyless device for vehicle | |
| JP6278410B2 (en) | In-vehicle device control system, in-vehicle control device, portable device | |
| JP2009264056A (en) | Electronic key system | |
| JP5614038B2 (en) | Wireless communication system | |
| JP2017082407A (en) | Vehicle door control system |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 15872237 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 15872237 Country of ref document: EP Kind code of ref document: A1 |