WO2015198413A1 - Drum for load handling machine, and load handling machine - Google Patents
Drum for load handling machine, and load handling machine Download PDFInfo
- Publication number
- WO2015198413A1 WO2015198413A1 PCT/JP2014/066771 JP2014066771W WO2015198413A1 WO 2015198413 A1 WO2015198413 A1 WO 2015198413A1 JP 2014066771 W JP2014066771 W JP 2014066771W WO 2015198413 A1 WO2015198413 A1 WO 2015198413A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- rope
- drum
- cargo handling
- handling machine
- guide
- Prior art date
Links
Images























Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66D—CAPSTANS; WINCHES; TACKLES, e.g. PULLEY BLOCKS; HOISTS
- B66D1/00—Rope, cable, or chain winding mechanisms; Capstans
- B66D1/28—Other constructional details
- B66D1/30—Rope, cable, or chain drums or barrels
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66D—CAPSTANS; WINCHES; TACKLES, e.g. PULLEY BLOCKS; HOISTS
- B66D1/00—Rope, cable, or chain winding mechanisms; Capstans
- B66D1/28—Other constructional details
- B66D1/36—Guiding, or otherwise ensuring winding in an orderly manner, of ropes, cables, or chains
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66D—CAPSTANS; WINCHES; TACKLES, e.g. PULLEY BLOCKS; HOISTS
- B66D1/00—Rope, cable, or chain winding mechanisms; Capstans
- B66D1/28—Other constructional details
- B66D1/36—Guiding, or otherwise ensuring winding in an orderly manner, of ropes, cables, or chains
- B66D1/38—Guiding, or otherwise ensuring winding in an orderly manner, of ropes, cables, or chains by means of guides movable relative to drum or barrel
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66D—CAPSTANS; WINCHES; TACKLES, e.g. PULLEY BLOCKS; HOISTS
- B66D1/00—Rope, cable, or chain winding mechanisms; Capstans
- B66D1/54—Safety gear
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B66—HOISTING; LIFTING; HAULING
- B66D—CAPSTANS; WINCHES; TACKLES, e.g. PULLEY BLOCKS; HOISTS
- B66D1/00—Rope, cable, or chain winding mechanisms; Capstans
- B66D1/54—Safety gear
- B66D1/56—Adaptations of limit switches
Definitions
- the present invention relates to a technology of a device for raising and lowering a load using a rope wound around a drum such as a hoist or a winch.
- the fleet angle is large, the unwinding speed of the rope and the followability of the load are bad, and when the rope speed is high and the acceleration / deceleration is repeated, the rebound (bounce) phenomenon due to the spring action of the rope occurs,
- the rope may come out of the groove and jump to the adjacent groove or the groove ahead.
- the rope is guided by the guide groove provided in the drum. Therefore, when the rope comes off the groove, the rope is damaged and the life of the rope is shortened. There are challenges.
- the present invention has been made to solve the above-described problems of the prior art.
- the object of the present invention is to damage the rope when winding and unwinding the rope wound around the drum. Therefore, it is to provide a drum that can be handled safely and to provide a technique for extending the life of the rope.
- the present invention is a drum for a cargo handling machine capable of winding a rope in multiple stages by parallel winding, for supporting and guiding the rope on the surface of a cylindrical drum body.
- the plurality of convex curved guide portions are cargo handling machine drums provided at predetermined intervals along the circumferential direction of the drum main body portion.
- the present invention is also effective when the guide portion is formed in a circular arc shape having a radius of curvature equal to or greater than the radius of the rope. In this invention, it is effective also when the support part for supporting the said rope is provided between the said guide parts.
- the drum main body portion has a concave rope accommodating portion for accommodating and fixing the tip end portion of the rope, and a portion for guiding the rope when the rope is pulled out from the rope accommodating portion. It is also effective in the case where a rope whose end is bent so as to correspond to the shape is accommodated and fixed in the rope accommodating portion of the drum main body.
- the present invention is a cargo handling machine including any of the above-described drums for a cargo handling machine, a drum drive mechanism that rotationally drives the drum for a cargo handling machine, and a control unit that controls the operation of the drum drive mechanism.
- the present invention further includes a rope feeding mechanism for guiding or moving the rope wound around or around the drum of the cargo handling machine in the direction of the axis of rotation of the drum.
- a rod-shaped rope reciprocating feed screw which is provided in parallel with the rotation axis and is rotatable with the drum for cargo handling machine, and a threaded portion of the rope reciprocating feed screw are mounted, and with the rotation of the rope reciprocating feed screw
- a block-shaped moving body configured to move in the longitudinal direction of the rope reciprocating feed screw and having a rope guide portion for guiding a rope unwound from the drum for a cargo handling machine, and the rope reciprocating feed screw;
- a rod-shaped guide shaft that is provided in parallel and guides the movable body in contact with the movable body, the guide shaft being rotatable If you have been made it is also effective.
- the present invention further includes a rope reverse winding detection mechanism for detecting a reverse winding state of the rope unwound from the cargo handling machine drum, wherein the reverse winding detection mechanism is a rope unwound from the cargo handling machine drum.
- a limit lever unit that is rotatably attached to the movable body and that operates a limit switch by the rotational movement.
- the limit lever unit is a rope that is unwound from the drum for a cargo handling machine. This is also effective when the limit switch is operated by rotating according to the displacement of the path.
- the present invention further has a no-load detection mechanism for detecting an unloaded state of the rope unwound from the drum for the cargo handling machine, and the no-load detection mechanism is provided on the rope unwound from the drum for the cargo handling machine.
- a loadless lever unit that is attached to the movable body so as to be able to rotate and that operates a limit switch by the rotational movement.
- the loadless lever unit is unwound from the drum for cargo handling machinery. This is also effective when the limit switch is operated by rotating in accordance with the change in the tension of the rope.
- the present invention further includes a rope presser mechanism for pressing a rope wound around the drum for a cargo handling machine, wherein the rope presser mechanism is connected to a rope wound around a central portion of a drum body portion of the drum for a cargo handling machine. It is also effective in the case of having a rope presser roller formed in a shape that does not come into contact with the rope wound around both ends of the drum main body of the cargo handling machine drum while making contact and pressing.
- the drum drive mechanism includes a DC or AC motor
- the control unit includes a rotation control unit that sets acceleration time and deceleration time of the motor, and an addition set in the rotation control unit.
- An acceleration / deceleration waveform control unit that determines a soft acceleration waveform and a soft deceleration waveform of the motor based on a deceleration signal, and a PWM generation unit that generates a PWM waveform based on a drive waveform signal from the acceleration / deceleration waveform control unit. Even when the cargo handling machine drum is lowered, the motor is driven by PWM control using the rotation control unit, the acceleration / deceleration waveform control unit, and the PWM generation unit. It is effective.
- FIG.3 (a) is the figure seen from one side
- FIG.3 (b) is the figure seen from the other side.
- Development view of the drum body Side view for explaining a straight portion and an intersecting portion of the drum main body Explanatory drawing which shows the arrangement structure of the support part of the drum main-body part FIGS.
- FIGS. 7A to 7C are explanatory views showing the configuration and dimensional relationship of the guide portion and the support portion in the drum main body, and FIGS. 7D and 7E are the configurations of the first and second guide portions.
- FIG. 12A to 12C show an embodiment of a rope feeding mechanism used in the present invention.
- FIG. 12A is a partial cross-sectional view showing the overall configuration
- FIG. 12B is a configuration of a shifter block.
- FIG. 12C is a side view showing the configuration of the main part of the rope feeding mechanism.
- FIG. 17 (a) is a front view showing the overall configuration
- FIG. 17 (b) shows the main configuration of the rope reverse winding detection mechanism.
- FIG. 17 (c) is a side view showing the overall configuration of the rope reverse winding detection mechanism.
- FIGS. 19A to 19C show the no-load detection lever unit of the no-load detection mechanism used in the present invention.
- FIG. 19A is a partial cross-sectional view seen from the no-load detection guide sheave side.
- b) is a side view
- FIG. 19 (c) is a partial sectional view as seen from the guide sheave side.
- FIG. 20 (a) is a front partial sectional view showing the overall configuration
- FIG. 20 (b) shows the main configuration of the no-load detection mechanism.
- FIG. 20C is a side view showing the entire configuration of the no-load detection mechanism.
- FIG. 24 (a) is a side view showing the main part of the drum
- FIG. 24 (b) is FIG. AA line cross section (A) to (d): showing a mechanism for preventing the rope end portion from rising in the present embodiment.
- FIG. 25 (a) is an explanatory view showing the configuration of the tip of the conventional rope
- FIG. 25 (b) is an explanatory view showing a case where a conventional rope is fixed to a drum main body
- FIG. 25C is an explanatory view showing a configuration of a tip portion of the rope of the present embodiment
- FIG. 25D is a present embodiment. Explanatory drawing showing the case of fixing the rope to the drum body
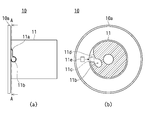
- FIG.1 (a) is a front view which shows the external appearance structure of embodiment of the hoist which is a cargo handling machine based on this invention
- FIG.1 (b) is a side view which shows the external appearance structure of the hoist.
- the hoist 1 of the present embodiment is used in a factory or the like.
- the hoist 1 is hung by a support hook 3 on a support shaft 2 provided at a high place. It is configured.
- the hoist 1 has an apparatus main body 4 in which a drum 10 and the like to be described later are accommodated.
- a rope 20 unwound from the drum 10 is led downward from a main body frame 4a at the lower part of the apparatus main body 4, and the rope 20 The hook 6 provided at the front end portion is moved upward or downward.
- a hollow weight 5 for adjusting the tension of the rope 20 is detachably mounted on the hook 6.
- a DC or AC motor 7 for rotating the drum 10 is provided on one side of the apparatus body 4, and the rotation speed of the drum 10 is controlled on the other side of the apparatus body 4.
- a drive mechanism unit 8 is provided.
- a reduction gear, a clutch mechanism, a brake mechanism, and the like are provided in the drive mechanism unit 8.
- a control unit 9 is provided on the front surface of the main body frame 4a. The control unit 9 controls the driving of the motor 7, and controls the rotation of the motor 7 by an operation switch 9 a connected to the control unit 9.
- FIG. 2 is a front view showing an external configuration of the drum in the present embodiment.
- 3 (a) and 3 (b) are front views showing the external configuration of the drum body of the drum, FIG. 3 (a) is a view from one side, and FIG. 3 (b) is a view from the other side. It is a figure.
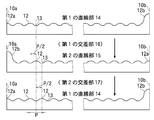
- FIG. 4 is a development view of the drum main body
- FIG. 5 is a side view for explaining a straight portion and an intersection of the drum main body
- FIG. 6 is an arrangement configuration of support portions of the drum main body. It is explanatory drawing which shows.
- a drum (handling machine drum) 10 of the present embodiment has a cylindrical drum body 11, and first and second flanges are provided at both ends of the drum body 11. 10a and 10b are provided in parallel.
- the rope 20 is wound around the drum main body 11 in multiple layers in parallel.
- the drum body 11 has a plurality of convex curved guide portions 12 provided on the surface thereof at predetermined intervals along the circumferential direction.
- each guide portion 12 is formed in an arc shape in cross section, and a planar support portion 13 is provided between the guide portions 12, for example.
- the surface area of the drum main body 11 includes a first straight portion 14, a second straight portion 15, a first intersecting portion (crossover portion) 16, and a second intersecting portion. It is divided into regions (crossover portions) 17.
- the guide portion 12 and the support portion 13 are formed in a straight line and parallel along the circumferential direction of the drum body portion 11, that is, the direction orthogonal to the rotation axis. Yes.
- the guide portion 12 and the support portion 13 are inclined at a predetermined angle in the same direction with respect to the circumferential direction of the drum body portion 11, that is, the rotation axis, as will be described later. Are formed in parallel in a straight line.
- first and second straight portions 14 and 15 and the first and second intersecting portions 16 and 17 are provided so as to be symmetrical on the surface of the drum main body 11, respectively.
- the first straight portion 14, the first crossing portion 16, the second straight portion 15, and the second straight portion 14 in the winding direction K of the rope 20 with reference to the rope outlet 11 a provided at the crossing portion 17. are provided in the order of the intersections 17 (see FIGS. 4 and 5).
- the 1st and 2nd linear parts 14 and 15 are formed in the same length, and the length of the 1st and 2nd intersection parts 16 and 17 is also formed in the same length.
- first and second straight portions 14 and 15 are set to be longer than the lengths of the first and second intersecting portions 16 and 17, respectively.
- the guide portions 12 and the support portions 13 are respectively in the direction of the rotation axis of the cylinder by 1 ⁇ 2 pitch P between the starting point and the ending point. Inclined so as to be displaced in the (width direction).
- the pitch P of the guide part 12 and the support part 13 means the distance between the top parts of each guide part 12 (refer FIG. 6, FIG. 7 (a)).
- each guide portion 12 and support portion shifts in the rotational axis direction of the cylinder by 1 ⁇ 2 pitch P, and further moves from the second straight portion 15 to the first straight portion 14 via the second intersecting portion 17.
- the part 12 and the support part 13 are displaced by 1/2 pitch P in the rotation axis direction of the cylinder and make a round of the drum main body part 11, each guide part 12 and the support part 13 are in the rotation axis direction of the cylinder.
- the rope 20 is smoothly wound around the first and second straight portions 14 and 15 of the drum main body portion 11, and the end portion thereof will be described later.
- the 1st guide part 12a and the 2nd guide part 12b are provided.
- the first and second guide portions 12 a and 12 b are provided at opposite positions in the first straight portion 14 and the second straight portion 15 of the drum main body portion 11.
- FIGS. 7A to 7C are explanatory views showing the configuration and dimensional relationship of the guide part and the support part in the drum main body part in the present invention, and FIGS. 7D and 7E show the first and first parts. It is explanatory drawing which shows the structure of 2 guide parts.
- the lower portion of the rope 20 wound around the drum main body 11 is supported at two points by a pair of adjacent guide portions 12 formed in a convex shape (see FIG. 7A).
- the pitch P of the guide portion 12 is set to be slightly larger than the diameter ⁇ of the rope 20 (see FIG. 7A).
- the reason for this is to provide a slight gap between the adjacent first layer ropes 20 wound around the drum main body 11 so that the ropes 20 can be smoothly wound in multiple layers.
- the preferable pitch P of the guide portion 12 is 1.03 to 1.05 times the diameter ⁇ of the rope 20.
- the curvature radius R, width D and height H of the guide portion 12 and the width d of the support portion 13 between the guide portions 12 are the first layer when the rope 20 is wound around the drum body portion 11.
- the distance between the rope 20 and the support portion 13 is set in consideration.
- the preferred curvature radius R of the guide portion 12 is 1 ⁇ 2 of the diameter ⁇ of the rope 20.
- the height H of the guide portion 12 (distance from the support portion 13) is the distance h between the lower portion of the rope 20 and the support portion 13 when the rope 20 is supported by a pair of adjacent guide portions 12. (See FIGS. 7B and 7C).
- first guide portion 12a and the second guide portion 12b are provided at the ends of the first and second linear portions 14 and 15 of the drum main body portion 11 (see FIG. 6). As described below, the first guide portion 12a and the second guide portion 12b are formed so as to have different shapes and sizes (see FIG. 7D).
- the first guide portion 12a is formed continuously with the support portion 13 at one end portion of the drum main body portion 11, and has a shape such that the guide portion 12 is divided into two with respect to the central portion, and the height of the end portion is increased. Is configured to be the highest.
- the end portion of the first guide portion 12a is flush with the inner surface of the first or second flange 10a, 10b (see FIG. 6).
- the first guide portion 12a supports the rope 20 at the end of the first layer together with the adjacent guide portion 12. Therefore, from the viewpoint of reliably guiding and supporting the rope 20, the first guide portion 12a
- the guide portion 12a is preferably formed in the same shape as the inclined surface of the guide portion 12.
- the width and height of the first guide portion 12a are determined so that the first guide portion 12a and the adjacent guide portion 12 support the first layer of rope 20 on the flange side of the rope 20. It is preferable to set so that the portion is supported in contact with the first or second flange 10a, 10b.
- the second guide portion 12b includes a lower guide portion 12b 1 formed continuously with the support portion 13 at the other end of the drum body portion 11, and an upper portion continuous with the lower guide portion 12b 1. and a upper guide portion 12b 2 formed in (see FIG. 7 (e)).
- the lower guide portion 12b 1 of the second guide portion 12b supports the rope 20 at the end of the first layer together with the adjacent guide portion 12, and therefore the viewpoint of reliably guiding and supporting the rope 20 From the above, it is preferable that the shape of the lower guide portion 12b 1 is the same as the inclined surface of the guide portion 12, that is, the same radius of curvature R as that of the guide portion 12.
- the upper guide portion 12b 2 of the second guide portion 12b supports the rope 20 at the end of the second layer together with the rope 20 at the end of the first layer, as will be described later.
- the shape of the upper guide portion 12 b 2 is preferably formed with the same radius of curvature R as the guide portion 12.
- the end portion of the upper guide portion 12b 2 of the second guide portion 12b is flush with the inner surface of the first or second flange 10a, 10b (see FIG. 6).
- the width and height of the second guide portion 12b are such that when the second layer rope 20 is supported by the upper guide portion 12b 2 and the rope 20 at the end of the first layer, the second layer rope 20 is provided. It is preferable to set the side of the flange side so as to contact the first or second flange 10a, 10b.
- the diameter ⁇ of the rope 20 is 5.2 mm.
- the pitch P of the guide portion 12 is 5.4 mm, the curvature radius R of the guide portion 12 is 2.5 to 2.6 mm, and the width D of the guide portion 12 is about 4 mm.
- the height H of 12 is about 1 mm.
- FIGS. 8A to 8D are diagrams schematically showing a cross-sectional configuration and principle of a drum main body according to the prior art.
- FIGS. 9A to 9C are diagrams schematically showing the principle of the drum main body of the present invention.
- a guide groove 113 is provided on the surface of the drum main body 111.
- an acute-angle protrusion 112 having a small curvature is formed between the adjacent guide grooves 113.
- the guide groove 113 is formed in a circular arc shape having a radius of curvature r 1 slightly larger than the radius r 0 of the rope 120 having a diameter d 0 , and is provided along the circumference of the drum body 111.
- the radius of curvature r 1 of the guide groove 113 is 0.535 d 0 or more and 0.56 d 0 or less.
- the depth H 0 of the guide groove 113 is 0.28d 0 or more and 0.45d 0 or less.
- the guide grooves 113 are shifted from each other by 1 ⁇ 2 pitch in the first and second linear portions 14, 15 and the first and second intersecting portions 16, 17 in the same manner as in the present invention.
- the guide grooves 113 are provided so as to be continued with a shift of one pitch.
- the rope 120 is wound along the guide groove 113 by the same method as the present invention, and the rope 120 is inclined in the direction opposite to the inclination direction of the lower rope 120 at the first and second intersecting portions 16 and 17. It is designed to be wound up by riding it.
- the load F acts on the cross section of the rope 120 wound around the drum main body 111 from the bottom of the guide groove 113 to the bottom of the guide groove 113 with respect to the cross section.
- the reaction force f acts on the cross section at one point on the drawing (see FIG. 8B).
- the rope 120 is an elastic body, a force does not act at one point, but in order to make the explanation easy to understand, it will be described as a rigid body.
- the radius of curvature r 1 of the guide groove 113 is configured to be larger than the radius r 0 of the rope 120 (see FIG. 8A).
- the guide groove 113 described above is used, and the rope 120 is wound only on the first layer and then used as a multi-layer winding.
- the first layer rope 120 is useless and the environment Causes load.
- the rope 120 may be unwound by mistake, resulting in a dangerous state.
- the convex arcuate guide portion 12 since the convex arcuate guide portion 12 is adopted, for example, when the load is pulled diagonally or wound with no load, a turbulence is generated and the load is lifted as it is. In this case, even when the rope 20 is out of the row and is displaced to the next row or beyond, the cross-sectional shape of the guide portion 12 is close to the radius of the rope 20 and is not a sharp shape as in the prior art. Will not cause damage.
- the first layer rope 20 is supported at two points with respect to the cross section, so that the centering function works on each rope 20.
- the distance between the rows of the ropes 20 of the layer can be stabilized.
- the load acting on the drum main body 11 from the rope 20 can be distributed and received at two points with respect to the cross section, thereby reducing the stress concentration in the rope 20. it can.
- the force acting on the rope 20 from the drum main body 11 can be distributed and received at two points with respect to the cross section, whereby the stress concentration in the rope 20 can be relaxed.
- wear of the drum main body 11 can be reduced and the life of the rope 20 can be extended.
- the rope 20 when an overload is applied to the rope 20 such as at the time of ground cutting (separation from the ground), the rope 20 is a pair of convex guide portions 12A and 12B adjacent to the drum main body portion 11.
- the rope 20 is mainly compressed and deformed, so that the portion of the rope 20 on the drum main body 11 side comes into contact with and is supported by the support portion 13 between the guide portions 12A and 12B of the drum main body 11. (See FIG. 9C).
- the load acting on the drum body 11 from the rope 20 can be distributed and received at three points with respect to the cross section.
- stress concentration in the rope 20 can be reduced.
- the wear of the drum body 11 can be reduced and the life of the rope 20 can be extended.
- the shape of the support portion 13 is not limited to the above-described plane, but may be a convex shape or a concave shape.
- FIG. 10 is a block diagram showing the configuration of the control unit of the present embodiment.
- the control unit 9 of the present embodiment has a rotation control unit 101 for controlling the rotation of the DC motor 7 described above, and the rotation control unit 101 includes the operation described above.
- An up or down instruction signal is input from the switch 9a.
- the rotation control unit 101 sets the acceleration time and deceleration time of the motor 7 and the subsequent constant speed conditions, and outputs an instruction signal based on these settings.
- the rotation control unit 101 is connected to the acceleration / deceleration waveform control unit 102 and the constant velocity waveform control unit 103.
- the acceleration / deceleration waveform control unit 102 receives the acceleration / deceleration signal from the rotation control unit 101, sets the acceleration waveform (soft start) and deceleration waveform (soft stop) of the motor 7, and sets the set drive waveform signal at a predetermined timing. Output to the PWM generator 104.
- the constant speed waveform control unit 103 receives the constant speed signal from the rotation control unit 101, determines the constant speed waveform of the motor 7, and outputs the determined drive waveform signal to the PWM generation unit 104 at a predetermined timing.
- the PWM generation unit 104 generates a PWM waveform at a low voltage based on the drive waveform signals from the acceleration / deceleration waveform control unit 102 and the constant velocity waveform control unit 103, and outputs the PWM waveform signal to the motor drive circuit 105.
- the motor drive circuit 105 converts the PWM waveform signal from the PWM generation unit 104 into a motor output waveform signal, and outputs this signal to the motor 7. With such a configuration, the motor 7 can perform a soft start when starting and a soft stop when stopping.
- the motor 7 is provided with a sensor (not shown) that detects its rotational position and the like, and a position detector 106 that reads the state of the sensor based on a signal from this sensor. It has been. Thereby, the position detection part 106 outputs a stop signal also to the state detection part 107, when the operation
- the state detection unit 107 monitors the state operation of the motor 7, and when receiving a stop signal from the position detection unit 106, outputs a signal to the rotation control unit 101 that all operation instructions should be prohibited. To do. As a result, the rotation control unit 101 stops outputting instruction signals to the acceleration / deceleration waveform control unit 102 and the constant velocity waveform control unit 103. As a result, the rotation operation of the motor 7 is stopped.
- the acceleration signal set in the rotation control unit 101 is changed to a predetermined soft waveform in the acceleration / deceleration waveform control unit 102, and the low voltage is generated in the PWM generation unit 104. After the PWM waveform is generated, the motor 7 is started (soft start).
- Controlling the operation of the motor 7 in this way prevents the occurrence of relative slip between the upper layer portion and the lower layer rope 20 wound around the drum main body portion 11 when the drum 10 is lowered. As a result, the rope 20 can be prevented from being lifted or jumped to the adjacent guide portion 12.
- FIGS. 11A and 11B show the configuration of the drive system of the present embodiment.
- FIG. 11A is an internal front view and FIG. 11B is an internal side view.
- the driving gear 21 is connected to the second flange 10 b on the motor side of the drum 10 provided in the apparatus main body 4. It is attached concentrically with the rotation axis O and is configured to rotate with the drum 10.
- a first transmission gear 23 that rotates about a support shaft 22 provided in the apparatus main body 4 is provided below the drive gear 21, and the first transmission gear 23 meshes with the drive gear 21. It is provided as follows.
- the gear ratio of the first transmission gear 23 is set to be equivalent to that of the driving gear 21. Further, a pinion gear 24 having a smaller number of teeth than the first transmission gear 23 is integrally and concentrically fixed to the first transmission gear 23.
- a rope reciprocating feed screw 30 is provided below the drum 10 in the apparatus body 4.
- the rope reciprocating feed screw 30 is made of an engineering resin (for example, polyacetal, high density polyethylene, nylon resin, carbon fiber, or the like).
- the rope reciprocating feed screw 30 is formed in a straight line and is arranged in parallel with the rotation axis O of the drum 10, and the rotation shaft 31 is rotatably supported by bearings 32 provided on both sides of the main body frame 4 a.
- the rope reciprocating feed screw 30 has a thread groove portion 33 in the middle part thereof, and a shifter block 50 described later meshes with the screw groove portion 33 so that the rope reciprocating feed screw 30 reciprocates at a predetermined speed along the direction in which the rope reciprocating feed screw 30 extends. It is like that.
- a second transmission gear 25 is fixed to the rotary shaft 31 of the rope reciprocating feed screw 30, and the second transmission gear 25 is disposed so as to mesh with the pinion gear 24 described above.
- the number of teeth of the second transmission gear 25 is set to be larger than the number of teeth of the pinion gear 24.
- a rod-shaped guide shaft 40 for guiding a shifter block 50 described later is provided obliquely below the rope reciprocating feed screw 30.
- the guide shaft 40 is formed in a straight line and is arranged in parallel with the rope reciprocating feed screw 30, and both ends thereof are rotatably supported by bearings 43 provided on both sides of the main body frame 4a.
- the driven gear 26 is fixed to the guide shaft 40, and the driven gear 26 is disposed so as to mesh with the second transmission gear 25 described above.
- the number of teeth of the driven gear 26 is set to be smaller than the number of teeth of the second transmission gear 25.
- FIG. 12 (a) to 12 (c) show an embodiment of the rope feeding mechanism used in the present invention.
- FIG. 12 (a) is a partial sectional view showing the entire configuration
- FIG. 12 (b) is a shifter.
- FIG. 12C is a side view showing the configuration of the main part of the rope feed mechanism.
- this rope feed mechanism has a shifter block 50 that is mounted across the rope reciprocating feed screw 30 and the guide shaft 40 described above.
- the shifter block 50 has a main body 51 formed in a rectangular parallelepiped shape, for example.
- the shifter block 50 is configured such that the above-described rope reciprocating feed screw 30 penetrates at one end of the main body 51 and the above-described guide shaft 40 penetrates at the other end of the main body 51. Has been.
- a top 52 having a projection that meshes with the thread groove 33 of the rope reciprocating feed screw 30 is provided, and the top 52 and the thread groove 33 of the rope reciprocating feed screw 30 are engaged with each other.
- the shifter block 50 is configured to reciprocate in the rotational axis direction of the rope reciprocating feed screw 30 as the rope reciprocating feed screw 30 rotates.
- the hoist 1 of the present embodiment performs parallel multi-layer winding by supporting the rope 20 by the convex guide portion 12 provided in the drum main body portion 11 as described above, a conventional parallel grooved drum is used.
- the fleet angle is set to be 90 ° ⁇ 1.5 ° or less with respect to the rotation axis O of the drum 10, and particularly in the vicinity of the first and second flanges 10 a and 10 b. It is necessary to set the fleet angle to be 90 degrees ⁇ about 1.0 to 1.5 degrees so that the transfer of the rope 20 to the road becomes smooth.
- the screw at the central portion of the rope reciprocating feed screw 30 is moved so that the shifter block 50 moves at a slightly smaller pitch than the pitch P of the guide portion 12 described above.
- the angle and speed ratio of the groove 33 are set.
- a guide sheave 53 is provided at the other end of the main body 51 of the shifter block 50.
- the guide sheave 53 moves the rope 20 fed from the drum 10 so as to come to the center position of the hoist 1, and is attached to a position inside the shifter block 50.
- a ball bearing 54 is attached to the guide sheave 53, and a slide bearing 55 is attached inside the ball bearing 54 (see FIG. 12A).
- the slide bearing 55 is attached so as to penetrate in the width direction of the guide sheave 53, and both ends thereof are fixed to the shifter block 50 in a state in which the slide sheave cannot be rotated by, for example, a stop screw (not shown).
- a guide shaft 40 is inserted and arranged concentrically with the guide shaft 40.
- the rope 20 is inserted into a through hole 51 a provided in the middle part of the main body 51 of the shifter block 50, and is engaged with the sheave groove 53 a of the guide sheave 53 to guide the rope 20. (See FIGS. 12A and 12B).
- the rotational power of the drive gear 21 attached concentrically with the rotation axis O of the drum 10 is the first. It is transmitted via the transmission gear 23, the pinion gear 24, and the second transmission gear 25, whereby the rope reciprocating feed screw 30 rotates at a predetermined speed, and the shifter block 50 extends along the direction in which the rope reciprocating feed screw 30 extends.
- the rotational power of the second transmission gear 25 is transmitted to the driven gear 26 fixed to the guide shaft 40, so that the guide shaft 40 rotates.
- the number of teeth of the second transmission gear 25 fixed to the rotary shaft 31 of the rope reciprocating feed screw 30 is the number of teeth of the driven gear 26 fixed to the guide shaft 40.
- the rotational speed of the guide shaft 40 is set to be larger than the rotational speed of the rope reciprocating feed screw 30.
- FIGS. 13 (a) to 13 (d) and FIGS. 14 (a) to 14 (c) are explanatory views showing the operation of winding the rope in the present embodiment around the drum body.
- the cross-sectional configuration of the first straight portion 14 is schematically shown.
- the tip of the rope 20 is fixed to the rope outlet 11a (see FIG. 4) of the drum main body 11, and the drum 10 is rotated and the shifter block 50 is operated to wind the rope 20 in parallel winding.
- the first layer of rope 20A includes a first guide portion 12a on the first flange 10a side, a guide portion 12C adjacent to the first guide portion 12a, 1 (see FIG. 13A).
- the first layer of rope 20A is sequentially applied to the pair of adjacent guide portions 12 toward the second guide portion 12b on the second flange 10b side.
- the second layer rope 20B is connected to the first layer rope 20A at the end on the second guide portion 12b side and the second layer. It rides on the guide portion 12b and is supported by the first layer rope 20A, the upper guide portion 12b2 of the second guide portion 12b, and the second flange 10b (see FIG. 13C).
- the second-layer rope 20B is sequentially supported by the adjacent first-layer rope 20A toward the first flange 10a ( (Refer FIG.13 (d)).
- the second layer rope 20B is inclined in the direction opposite to the inclination direction of the first layer rope 20A, and the first layer It rides on the rope 20A and is wound.
- the third layer rope 20C is supported by the first flange 10a, and the second layer at the end of the first flange 10a side. It rides on the rope 20B of the eye and is supported by the rope 20B of the second layer and the first flange 10a (see FIG. 14A).
- the third layer rope 20C is sequentially supported by the adjacent second layer rope 20B toward the second flange 10b ( (Refer FIG.14 (b)).
- the rope 20C of the third layer is inclined in the direction opposite to the inclination direction of the rope 20B of the second layer, and the second layer It rides on the rope 20B and is wound.
- the fourth layer rope 20D is supported by the second flange 10b, and the third layer on the second flange 10b side end. It rides on the rope 20C of the eye and is supported by the rope 20C of the third layer and the second flange 10b (see FIG. 14C).
- the gear ratio of the driven gear 26 and the second transmission gear 25 is set so that the rotational speed of the guide shaft 40 is 2 to 3 times the rotational speed of the rope reciprocating feed screw 30.
- the slide may not go smoothly due to the presence of dust and the lack of lubrication of the guide shaft 40, which may cause a self-lock and stop moving, but according to this embodiment, Such inconvenience does not occur, and the length of the slide bearing 55 of the guide shaft 40 can be shortened as the friction coefficient is reduced, so that a more compact rope feeding mechanism can be provided. It was.
- the rope reciprocating feed screw used for the conventional hoist and winch was made of a steel material including stainless steel, in this embodiment, by configuring the rope reciprocating feed screw 30 with the above-described engineering resin, Because of its self-lubricating property, oil and grease are not required, and dust can be made difficult to adhere.
- FIG. 15 is a schematic configuration diagram of an embodiment of a rope reverse winding detection mechanism and a no-load detection mechanism used in the present invention.
- this invention has a rope reverse winding detection mechanism and a no-load detection mechanism so that it may mention later.
- the shifter block 50 below the drum 10 in the main body frame 4a, the shifter block 50, a no-load detection lever unit 80 assembled to the shifter block 50, a limit dog 71, a limit cam 73, and a limit switch 75 are included.
- a load detection mechanism is provided below the drum 10 in the main body frame 4a.
- rope regulating rollers 41 and 42 are provided below the rope reverse winding detection mechanism and the no-load detection mechanism in the main body frame 4a.
- embodiments of the rope reverse winding detection mechanism and the no-load detection mechanism will be described in detail.
- FIG. 16 (a) and 16 (b) show a limit lever unit of the rope reverse winding detection mechanism of the present embodiment.
- FIG. 16 (a) is a side view and FIG. 16 (b) is a front view.
- FIGS. 17 (a) to 17 (c) show the configuration of the rope reverse winding detection mechanism
- FIG. 17 (a) is a front view showing the entire configuration
- FIG. 17 (b) is the rope reverse winding detection.
- FIG.17 (c) is a side view which shows the whole structure of the rope reverse winding detection mechanism.
- the rope reverse winding detection mechanism includes a limit lever unit 60 attached to the shifter block 50 described above.
- the limit lever unit 60 includes a pair of limit levers 61 having the same shape, and a detection roller 62 and a drive roller 63 attached to the pair of limit levers 61. Yes.
- the limit lever 61 is formed, for example, by bending an elongated plate-like member at right angles twice in different directions almost at the middle part, and by making these two limit levers 61 face each other, the drive unit 61a having a small interval between the levers A mounting portion 61b having a larger interval between the levers than the driving portion 61a is provided.
- the interval between the mounting portions 61 b of the pair of limit levers 61 is set to be slightly larger than the width of the shifter block 50.
- the drive part 61a of each limit lever 61 is formed in a straight line shape, and a drive roller 63 is attached to the tip of the limit lever 61 with the drive part 61a sandwiched between the drive parts.
- the drive roller 63 is configured to rotate about a support shaft 64 orthogonal to a straight line in the extending direction of the drive unit 61a.
- each limit lever 61 is formed such that its middle portion is curved in one direction, for example, in a boomerang shape on the same plane, and the radius of curvature of the edge portion 61c inside the curve is the rope reciprocating feed screw. It is set to be slightly larger than the radius of 30.
- the detection roller 62 is attached to the front-end
- the detection roller 62 is configured to rotate around a support shaft 65 parallel to the support shaft 64 of the drive roller 63 described above. Moreover, the detection roller 62 is comprised from the edge part roller 62a provided in the both ends, and the inner side press roller 62b provided inside these edge part rollers 62a.
- the outer diameter of the end roller 62a is set to be slightly larger than the outer diameter of the inner pressing roller 62b.
- the end roller 62a is made of stainless steel, for example.
- the inner pressing roller 62b is made of, for example, stainless steel or resin, and is configured to rotate independently of the end roller 62a.
- the limit lever unit 60 having such a configuration is rotatable around, for example, support shafts 56 provided on both sides of the shifter block 50 in a state where the shifter block 50 is sandwiched between the mounting portions 61b of the pair of limit levers 61. It is attached.
- the support shaft 56 is located in the vicinity of the through hole 51a for the rope reciprocating feed screw 30 of the shifter block 50 (see FIGS. 12A and 12B), and on the inner edge of the curved portion of the mounting portion 61b of each limit lever 61 It is provided in the vicinity of the portion 61c (see FIG. 16A).
- the limit lever unit 60 is configured such that the drive portion 61a is reciprocated by the rope of the shifter block 50 by a tension coil spring 58 having one end attached to a mounting bracket 57a fixed to the end of the shifter block 50 on the rope reciprocating feed screw 30 side. It is comprised so that it may be pulled by the feed screw 30 side edge part (refer FIG.17 (b)).
- a projecting locking portion 59 is provided on the upper portion of the main body 51 of the shifter block 50, that is, on the detection roller 62 side of the limit lever unit 60.
- the locking portion 59 is provided at a position facing the end roller 62a of the detection roller 62 (see FIG. 16B), and the tension coil spring 58 is in a state where no external force acts on the limit lever unit 60.
- the end roller 62a of the detection roller 62 abuts against the locking portion 59 and is locked by the elastic force.
- the limit lever unit 60 is attached such that the detection roller 62 is on the upper side with respect to the rope reciprocating feed screw 30 (shifter block 50).
- a limit dog 71 fixed to the linear rotary support shaft 70 is provided below the rope reciprocating feed screw 30 and on the opposite side of the rope reciprocating feed screw 30 from the guide shaft 40.
- the rotation support shaft 70 is arranged in parallel with the rope reciprocating feed screw 30 and is attached to the main body frame 4a in a rotatable state.
- the limit dog 71 is made of, for example, a plate-like member extending in the direction of the rotation support shaft 70, and the limit lever unit is configured such that one surface (here, the upper surface) is in contact with the drive roller 63 of the limit lever unit 60 described above.
- the dimension (length) of the drive part 61a of 60, the position of the rotation spindle 70, and the size and shape of the limit dog 71 are set (see FIGS. 17A and 17C).
- a torsion coil spring 72 is connected to the limit dog 71, and the end roller 62 a of the detection roller 62 is engaged with the locking portion 59 by the elastic force of the torsion coil spring 72 when no external force is applied to the limit dog 71.
- a torsion coil spring 72 is connected to the limit dog 71, and the end roller 62 a of the detection roller 62 is engaged with the locking portion 59 by the elastic force of the torsion coil spring 72 when no external force is applied to the limit dog 71.
- a limit cam 73 is provided at, for example, one end of the rotation support shaft 70 (see FIG. 17A), and a limit switch is provided at a position facing the arc-shaped cam surface of the limit cam 73, for example. 75 is provided.
- the limit switch 75 is turned off when the limit dog 71 shown in FIG. 17C faces obliquely upward and contacts the driving roller 63 of the limit lever unit 60, and is turned on when the limit dog 71 is pushed down. It is configured.
- 18A and 18B are explanatory views showing the operation of the rope reverse winding detection mechanism.
- the apparatus for performing multi-layer winding as in the present invention, if the row groove of the rope 20 collapses during lowering, a gap is generated between the rows, and the rope 20 is likely to bite into the gap.
- the rope 20 whose path is displaced from the guide shaft 40 side to the rope reciprocating feed screw 30 side pushes the inner pressing roller 62b of the detection roller 62 toward the rope reciprocating feed screw 30, and thereby the limit lever unit 60 is pulled by the tension coil.
- the drive roller 63 provided at the front end of the drive portion 61a of the limit lever unit 60 pushes down the limit dog 71 downward, and the limit switch 75 is turned off. Turn on. Thereby, the lowering operation of the motor 7 is stopped.
- the motor 7 When the operation of the motor 7 is stopped, the motor 7 is operated in the winding direction to return the rope 20 in the reverse winding state to the original position, so that the rope 20 is pressed against the inner pressing roller 62b of the detection roller 62. Since the force no longer acts, the limit lever unit 60 rotates around the support shaft 56 by the elastic force of the tension coil spring 58, returns to the original state shown in FIG. 18A, and the end roller 62a of the detection roller 62 Are brought into contact with the locking portions 59 and locked.
- the inner pressing roller 62b of the detection roller 62 has a smaller roller diameter than the end roller 62a of the detection roller 62, and the end roller 62a is pressed against the locking portion 59 of the shifter block 51. Even if it is a case, it is freely rotatable. For this reason, the inner pressing roller 62b does not rotate with respect to the rope 20, and the sliding rope 20 is not damaged.
- the rope outlet is arranged so that the tip end portion of the rope 20 does not fall out of the drum body 11.
- the female thread portion 11c connected to 11a is fixed by a rope stopper 11e (this point will be described later, see FIGS. 24A and 24B).
- the rope 20 can be wound up again without a problem. Even if the rope 20 is removed from the guide portion 12 of the drum main body portion 11, as described above, the guide portion 12 of the drum main body portion 11 is formed in a convex curved surface shape. There will be no damage.
- FIG. 19 (a) and 19 (b) show the no-load detection lever unit of the no-load detection mechanism used in the present invention.
- FIG. 19 (a) is a partial sectional view as seen from the guide sheave side for no-load detection.
- 19 (b) is a side view
- FIG. 19 (c) is a partial sectional view as seen from the guide sheave side.
- 20 (a) to 20 (c) show the configuration of the no-load detection mechanism
- FIG. 20 (a) is a front partial sectional view showing the entire configuration
- FIG. 20 (b) is the no-load detection mechanism.
- FIG.20 (c) is a side view which shows the whole structure of the no-load detection mechanism.
- the no-load detection mechanism includes the no-load detection lever unit 80 attached to the shifter block 50 described above.
- the no-load detection lever unit 80 includes a pair of no-load detection levers 81 having the same shape, and a no-load detection guide sheave 82 and a driving roller 83 attached to the pair of no-load detection levers 81.
- the no-load detection lever 81 has, for example, an elongated plate-like main body portion 81a, and has a drive projection 81b formed so as to extend obliquely to one side of the main body portion 81a.
- the pair of no-load detection levers 81 is provided inside the shifter block 50.
- the guide sheave 53 used in the rope feed mechanism and the rope reverse winding detection mechanism described above is sandwiched between the pair of no-load detection levers 81 at one end of the main body 81 a of the no-load detection lever 81.
- a no-load detection guide sheave 82 which will be described later, is provided at the other end of the main body 81a of the no-load detection lever 81 (the end on the side where the drive protrusion 81b is provided). 81 so as to be sandwiched by 81.
- a collar 54a is provided on both sides of the ball bearing 54 provided in the guide sheave 53, and the no-load detection lever 81 is configured to rotate around the collar 54a.
- a no-load detection guide sheave 82 is provided between the end portions of the main body 81a of the no-load detection lever 81 on the side where the drive protrusion 81b is provided.
- the no-load detection guide sheave 82 includes a pair of no-load detection levers 81 through which a cylindrical pin 84 provided in parallel with the guide shaft 40 passes, and the pin 84, collar 85, and shaft retaining ring ( It is rotatably mounted via a ball bearing 86 fixed by a not-shown).
- a driving roller 83 is attached to the outer portion of the tip of the driving protrusion 81b of each no-load detection lever 81 so as to be rotatable around a support shaft 87 parallel to the guide shaft 40.
- the no-load detection lever unit 80 having such a configuration is rotatably mounted around the rotation axis of the guide shaft 40 described above at a position inside the shifter block 50 (see FIG. 20B).
- the no-load detection guide sheave 82 and the drive roller 83 of the no-load detection lever unit 80 are positioned below the main body 51 of the shifter block 50, and the drive roller 83 is on the rope reciprocating feed screw 30 side. It is arranged to be located.
- the drive roller 63 of the limit lever 61 described above is arranged and configured so as to enter the inner portion of the tip of the drive protrusion 81b of the no-load detection lever 81 of the no-load detection lever unit 80 (FIGS. 15 and 15). 19 (a)).
- the no-load detection lever unit 80 one end is attached to the mounting bracket 57b fixed to the end of the shifter block 50 on the guide shaft 40 side, and the other end is a pin 84 of the no-load detection lever unit 80 (FIG. 19).
- the driving protrusion 81b is configured to be pulled to the end of the shifter block 50 on the side of the guide shaft 40 by the elastic force of the tension coil spring 58 attached to (a) and (b).
- the rope 20 unwound from the drum body 11 passes through the body 51 from above the body 51 of the shifter block 50 and enters the sheave groove 53 a of the guide sheave 53.
- One side is in contact, passes between the pair of no-load detection levers 81 of the no-load detection lever unit 80, and the other side of the rope 20 contacts the sheave groove 82a of the no-load detection guide sheave 82. Is configured to do.
- the rope 20 hangs directly under the long rollers 41 and 42.
- the rope 20 has the long roller 41 on the side of the guide sheave 53 by the elastic force of the tension coil spring 58 attached to the pin 84 of the no-load detection guide sheave 82 located substantially at the center between the guide sheave 53 and the long roller 41. It is pressed against.
- the spring force is set as follows. In other words, when the tension of the rope 20 during the lowering is larger than a predetermined set value (for example, 8% of the rated load), there is almost no deflection of the rope 20 and no load is detected by the elastic force of the tension coil spring 58.
- the force applied to the rope 20 from the guide sheave 82 and the force applied from the rope 20 to the no-load detection guide sheave 82 based on the tension of the rope 20 are set to be balanced.
- weights of the hook and weight are adjusted so that the tension of the rope 20 is, for example, 8 to 10% so that the limit switch 75 is not turned on when the load is not suspended.
- FIGS. 21A and 21B are explanatory diagrams showing the operation of the no-load detection mechanism.
- the tension of the rope 20 becomes equal to or higher than the set value.
- a compact configuration can be obtained by combining the shifter block 50 and the no-load detection lever unit 80.
- FIGS. 22A and 22B are diagrams showing the configuration of the rope presser mechanism
- FIG. 23 is an explanatory diagram showing the dimensional relationship of the rope presser roller of the rope presser mechanism.
- the rope presser mechanism 90 presses the surface of the rope 20 by the rope presser roller 91 when the rope 20 is wound up and down.
- the rope presser roller 91 is formed in a cylindrical shape, and is attached to the end of one long side of two L-shaped arms 92, for example, so as to be rotatable around the rotation shaft 93.
- An end portion on the short side of each arm 92 is provided so as to be rotatable about a support shaft 94 provided on the upper portion of the apparatus main body 4 of the hoist 1, for example.
- the support shafts 94 provided at both ends of the arm 92 are respectively arranged in parallel with the rotation axis O of the drum 10, so that the rope presser roller 91 is arranged in parallel with the drum main body 11. ing.
- the rope pressing roller 91 is configured to press the rope 20 against the drum body 11 by urging the arm 92 toward the drum body 11 by the elastic force of the torsion coil spring 97 provided on the support shaft 94, for example. Has been.
- a limit cam 95 is attached to the end portion of the arm 92 on the support shaft 94 side, and a limit switch 96 provided in the vicinity thereof is turned on / off in accordance with the operation of the arm 92.
- the rope presser roller 91 is slightly shorter than the width of the drum main body 11, and narrows from the central portion 91a toward the both end portions 91b in the axial direction via the tapered portions 91c.
- the diameter ⁇ D of both end portions 91b of the rope presser roller 91 is configured to be smaller than the diameter ⁇ A of the central portion 91a.
- the reason is as follows. That is, when a rope is wound on a drum having a conventional parallel groove, when the rope is transferred to a layer on one layer and the rope is pressed by means such as a roller, the ropes are stacked in multiple stages. When such a phenomenon occurs, the rope is wound in a random manner. Therefore, when transferring to the upper layer of the rope, it is necessary to make the rope free from contact with other members.
- the pitch is shifted by 0.5 pitch for each layer of the rope.
- the drum main body portion is represented by reference numeral B in FIG. It is necessary not to contact the rope 20 for 1.5 pitches of the 11 guide portions 12.
- the size and the inclination angle of the tapered portion 91c are set.
- the rope 20 being wound is inclined on the first and second intersecting portions 16 and 17 in a direction opposite to the inclination direction of the rope 20 that is one layer below. Wound by.
- the first and second straight portions 14 and 15 and the first and second intersecting portions 16 and 17 are provided so as to be symmetrical on the surface of the drum main body 11 (see FIG. Therefore, the rope 20 wound around the drum main body 11 has an elliptical cross-sectional shape in each layer, and the relative position is also the same.
- FIGS. 25 (a) to 25 (d) show a mechanism for preventing the rope end portion from lifting up in the present embodiment.
- FIG. 24A is a side view showing the main part of the drum
- FIG. 24B is a cross-sectional view taken along line AA of FIG.
- FIG. 25 (a) is an explanatory view showing the configuration of the tip of the conventional rope
- FIG. 25 (b) is an explanatory view showing a case where the conventional rope is fixed to the drum body
- FIG. 25 (c) is an explanatory view showing the configuration of the tip of the rope of the present embodiment
- FIG. 25D is an explanatory view showing a case where the rope of the present embodiment is fixed to the drum body.
- a concave rope housing portion 11b for housing the distal end portion of the rope 20 is provided in the vicinity of the first flange 10a of the drum main body portion 11, and the distal end of the rope 20 is placed in the rope housing portion 11b. It is comprised so that a rope 20 may be pulled out from the rope outlet 11a by inserting a part.
- the rope outlet 11a is formed in, for example, an oval shape extending in the circumferential direction of the drum main body 11, and a cylindrical female screw portion 11c is provided at the rear end portion so as to be connected to the rope outlet 11a. ing.
- the female threaded portion 11c is configured such that a rope stopper 11e, which is a male threaded plug, meshes with the hole to close the hole (see FIG. 24B).
- the rope accommodating portion 11b is provided with a convex curved rope guide portion 11d along the rope outlet 11a.
- the rope guide portion 11d extends from the rope accommodating portion 11b to the tip of the rope outlet 11a. It is formed so that the depth becomes shallower.
- a wire rope used in a cargo handling machine such as the present invention is provided with a bump-shaped lock pipe at its end.
- a rope 120 is inserted into the rope outlet 11a of the drum body 11 and then fixed with the rope stopper 11e, and the rope 120 is wound around the drum body 11, the lock 120a of the rope 120 is A phenomenon occurs in which the adjacent drawn portion 120b slightly floats from the curved surface of the drum main body 11 due to the rigidity of the rope 120 (see FIGS. 25A and 25B).
- the rope 20 of the present embodiment has a distal end portion corresponding to the shape of the portion that guides the rope 20 when the rope 20 is pulled out from the accommodating portion 11b of the drum main body portion 11. Bending is applied.
- bending of an equivalent radius of curvature is performed so that the drawn-out portion 20b on the rear end side in the vicinity of the lock tube 20a at the tip end portion of the rope 20 corresponds to the curved surface shape of the rope guide portion 11d of the drum main body portion 11.
- the routing portion 20c on the rope rear end side of the drawing portion 20b is bent so as to have the same radius of curvature as the surface of the drum body portion 11.
- the lock tube 20a of the rope 20 is locked and fixed by the protruding portion of the rope accommodating portion 11b and the rope stopper 11e.
- the drawn portion 20b of the rope 20 is subjected to, for example, bending processing with an equivalent curvature radius so as to correspond to the curved surface shape of the rope guide portion 11d of the rope 20 of the drum main body portion 11, and further, the drawn portion 20b. Since the bending portion 20c on the rear end portion side of the rope 20 is bent so as to have the same radius of curvature as the surface of the drum body portion 11, the drawing portion 20b of the rope 20 is provided with the drum body portion 11.
- the rope guide portion 11d is in close contact with each other, and the routing portion 20c of the rope 20 is in close contact with the surface of the drum main body portion 11, that is, the pair of guide portions 12.
- the rope 20 attached to the drum 10 does not float at all from the drum main body 11, and as a result, the diameter ⁇ D of the both ends 91b of the rope pressing roller 91 is increased to the limit. It became possible.
- the rope 20 when the rope 20 is wound in multiple layers, it can prevent that the tension
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Transmission Devices (AREA)
Abstract
The present invention provides a drum for a load handling machine, the drum allowing a rope to be wound therearound in multiple layers such that the windings are parallel to each other. Convex-shaped guide sections (12) for supporting and guiding a rope are arranged at predetermined intervals on the surface of a circular cylindrical drum body (11) so as to extend in the circumferential direction thereof. The guide sections (12) are formed to have a circular arc cross-sectional shape having a curvature radius greater than or equal to the radius of the rope. Supports (13) for supporting the rope are provided between the guide sections (12).
Description
本発明は、例えばホイストやウインチのようなドラムに巻き付けられたロープを用いて荷を昇降させる装置の技術に関する。
The present invention relates to a technology of a device for raising and lowering a load using a rope wound around a drum such as a hoist or a winch.
従来、この種の装置としては、例えば日本では平行巻と呼ばれる方式で、欧米ではバランス・ケーブル・スプーリング方式(例えば特許文献1参照)と呼ばれる方式のものが知られている。
このような方式の装置によってロープをドラムに多層巻をすれば、乱巻を発生せずに整列巻が可能になるが、この従来技術においては、フリートアングル等による制約条件があるため、常にロープに対してテンションを与えてたるみなく張っている必要がある。 Conventionally, as this type of apparatus, for example, a system called parallel winding is known in Japan, and a system called a balanced cable spooling system (see, for example, Patent Document 1) is known in Europe and the United States.
If the rope is wound in multiple layers on the drum by this type of device, it is possible to perform aligned winding without generating turbulent winding. However, in this conventional technique, there is a constraint condition such as fleet angle. It is necessary to give tension to the sag without slack.
このような方式の装置によってロープをドラムに多層巻をすれば、乱巻を発生せずに整列巻が可能になるが、この従来技術においては、フリートアングル等による制約条件があるため、常にロープに対してテンションを与えてたるみなく張っている必要がある。 Conventionally, as this type of apparatus, for example, a system called parallel winding is known in Japan, and a system called a balanced cable spooling system (see, for example, Patent Document 1) is known in Europe and the United States.
If the rope is wound in multiple layers on the drum by this type of device, it is possible to perform aligned winding without generating turbulent winding. However, in this conventional technique, there is a constraint condition such as fleet angle. It is necessary to give tension to the sag without slack.
しかしながら、フリートアングルが大きかったり、ロープの巻き出し速度と負荷の追従性が悪かったり、ロープ速度が高速で加減速を繰り返した場合ロープのバネ作用によるリバウンド(跳ね返り)現象が発生したりして、ロープが溝から外れてしまい、隣りの溝またはその先の溝までジャンプすることがある。
また、従来技術においては、ドラムに設けられたガイド溝によってロープを案内するようにしているため、ロープが溝から外れた場合には、ロープに損傷が与えられるとともに、ロープの寿命が短くなるという課題がある。 However, the fleet angle is large, the unwinding speed of the rope and the followability of the load are bad, and when the rope speed is high and the acceleration / deceleration is repeated, the rebound (bounce) phenomenon due to the spring action of the rope occurs, The rope may come out of the groove and jump to the adjacent groove or the groove ahead.
In addition, in the prior art, the rope is guided by the guide groove provided in the drum. Therefore, when the rope comes off the groove, the rope is damaged and the life of the rope is shortened. There are challenges.
また、従来技術においては、ドラムに設けられたガイド溝によってロープを案内するようにしているため、ロープが溝から外れた場合には、ロープに損傷が与えられるとともに、ロープの寿命が短くなるという課題がある。 However, the fleet angle is large, the unwinding speed of the rope and the followability of the load are bad, and when the rope speed is high and the acceleration / deceleration is repeated, the rebound (bounce) phenomenon due to the spring action of the rope occurs, The rope may come out of the groove and jump to the adjacent groove or the groove ahead.
In addition, in the prior art, the rope is guided by the guide groove provided in the drum. Therefore, when the rope comes off the groove, the rope is damaged and the life of the rope is shortened. There are challenges.
本発明は、このような従来の技術の課題を解決するためになされたもので、その目的とするところは、ドラムに巻き付けられたロープの巻上げ及び巻下げを行う際に、ロープに損傷を与えず、安全に対処できるドラムを提供するとともに、ロープ寿命を延ばす技術を提供することにある。
The present invention has been made to solve the above-described problems of the prior art. The object of the present invention is to damage the rope when winding and unwinding the rope wound around the drum. Therefore, it is to provide a drum that can be handled safely and to provide a technique for extending the life of the rope.
上記目的を達成するためになされた本発明は、平行巻でロープを多段に巻き付け可能な荷役機械用ドラムであって、円筒形状のドラム本体部の表面に、前記ロープを支持して案内するための複数の凸曲面形状のガイド部が、前記ドラム本体部の円周方向に沿って所定の間隔で設けられている荷役機械用ドラムである。
本発明では、前記ガイド部が、前記ロープの半径と同等若しくは前記ロープの半径より大きな曲率半径を有する断面円弧形状に形成されている場合にも効果的である。
本発明では、前記ガイド部の間に、前記ロープを支持するための支持部が設けられている場合にも効果的である。
本発明では、前記ドラム本体部に前記ロープの先端部を収容して固定するための凹部状のロープ収容部を有し、前記ロープ収容部から当該ロープを引き出す際に当該ロープを案内する部分の形状に対応するように先端部に曲げ加工を施したロープを前記ドラム本体部のロープ収容部に収容して固定するように構成されている場合にも効果的である。
また、本発明は、上述したいずれかの荷役機械用ドラムと、前記荷役機械用ドラムを回転駆動させるドラム駆動機構と、前記ドラム駆動機構の動作を制御する制御部とを有する荷役機械である。
本発明では、前記荷役機械用ドラムに巻き付ける際又は巻き付けられたロープを当該ドラムの回転軸線方向に案内移動させるためのロープ送り機構を更に有し、当該ロープ送り機構は、前記荷役機械用ドラムの回転軸線と平行に設けられ、前記荷役機械用ドラムと共に回転可能な棒状のロープ往復送りねじと、前記ロープ往復送りねじのねじ部と噛み合うように装着され、前記ロープ往復送りねじの回転に伴って当該ロープ往復送りねじの長手方向に移動するように構成されるとともに、前記荷役機械用ドラムから巻き出されたロープを案内するロープ案内部を有するブロック状の移動体と、前記ロープ往復送りねじと平行に設けられ、前記移動体と接触して当該移動体を案内するための棒状のガイド軸とを有し、前記ガイド軸が回転可能に構成されている場合にも効果的である。
本発明では、前記荷役機械用ドラムから巻き出されたロープの逆巻状態を検知するロープ逆巻検知機構を更に有し、前記逆巻検知機構は、前記荷役機械用ドラムから巻き出されたロープに接触するとともに、前記移動体に回転移動可能に取り付けられ、その回転移動によってリミットスイッチを動作させるリミットレバーユニットを有し、当該リミットレバーユニットは、前記荷役機械用ドラムから巻き出されたロープの経路の変位に応じて回転移動することによって前記リミットスイッチを動作させるように構成されている場合にも効果的である。
本発明では、前記荷役機械用ドラムから巻き出されたロープの無負荷状態を検知する無負荷検知機構を更に有し、前記無負荷検知機構は、前記荷役機械用ドラムから巻き出されたロープに接触するとともに、前記移動体に回転移動可能に取り付けられ、その回転移動によってリミットスイッチを動作させる無負荷検知レバーユニットを有し、当該無負荷検知レバーユニットは、前記荷役機械用ドラムから巻き出されたロープの張力の変化に応じて回転移動することによって前記リミットスイッチを動作させるように構成されている場合にも効果的である。
本発明では、前記荷役機械用ドラムに巻き付けられたロープを押えるロープ押え機構を更に有し、前記ロープ押え機構は、前記荷役機械用ドラムのドラム本体部の中央部分に巻き付けられたロープに対して接触して押圧する一方で、前記荷役機械用ドラムのドラム本体部の両端部に巻き付けられたロープに対して接触しない形状に形成されたロープ押えローラを有する場合にも効果的である。
本発明では、前記ドラム駆動機構は、DC又はAC方式のモータを有するとともに、前記制御部は、前記モータの加速時間及び減速時間の設定する回転制御部と、当該回転制御部において設定された加減速信号に基づいて前記モータのソフト加速波形とソフト減速波形を決定する加減速波形制御部と、当該加減速波形制御部からの駆動波形信号に基づいてPWM波形を生成するPWM生成部とを有し、前記荷役機械用ドラムの巻下げの際に、前記回転制御部、前記加減速波形制御部及び前記PWM生成部を用いたPWM制御によって前記モータを駆動させるように構成されている場合にも効果的である。 In order to achieve the above object, the present invention is a drum for a cargo handling machine capable of winding a rope in multiple stages by parallel winding, for supporting and guiding the rope on the surface of a cylindrical drum body. The plurality of convex curved guide portions are cargo handling machine drums provided at predetermined intervals along the circumferential direction of the drum main body portion.
The present invention is also effective when the guide portion is formed in a circular arc shape having a radius of curvature equal to or greater than the radius of the rope.
In this invention, it is effective also when the support part for supporting the said rope is provided between the said guide parts.
In the present invention, the drum main body portion has a concave rope accommodating portion for accommodating and fixing the tip end portion of the rope, and a portion for guiding the rope when the rope is pulled out from the rope accommodating portion. It is also effective in the case where a rope whose end is bent so as to correspond to the shape is accommodated and fixed in the rope accommodating portion of the drum main body.
Further, the present invention is a cargo handling machine including any of the above-described drums for a cargo handling machine, a drum drive mechanism that rotationally drives the drum for a cargo handling machine, and a control unit that controls the operation of the drum drive mechanism.
The present invention further includes a rope feeding mechanism for guiding or moving the rope wound around or around the drum of the cargo handling machine in the direction of the axis of rotation of the drum. A rod-shaped rope reciprocating feed screw which is provided in parallel with the rotation axis and is rotatable with the drum for cargo handling machine, and a threaded portion of the rope reciprocating feed screw are mounted, and with the rotation of the rope reciprocating feed screw A block-shaped moving body configured to move in the longitudinal direction of the rope reciprocating feed screw and having a rope guide portion for guiding a rope unwound from the drum for a cargo handling machine, and the rope reciprocating feed screw; A rod-shaped guide shaft that is provided in parallel and guides the movable body in contact with the movable body, the guide shaft being rotatable If you have been made it is also effective.
The present invention further includes a rope reverse winding detection mechanism for detecting a reverse winding state of the rope unwound from the cargo handling machine drum, wherein the reverse winding detection mechanism is a rope unwound from the cargo handling machine drum. And a limit lever unit that is rotatably attached to the movable body and that operates a limit switch by the rotational movement. The limit lever unit is a rope that is unwound from the drum for a cargo handling machine. This is also effective when the limit switch is operated by rotating according to the displacement of the path.
In the present invention, it further has a no-load detection mechanism for detecting an unloaded state of the rope unwound from the drum for the cargo handling machine, and the no-load detection mechanism is provided on the rope unwound from the drum for the cargo handling machine. And a loadless lever unit that is attached to the movable body so as to be able to rotate and that operates a limit switch by the rotational movement. The loadless lever unit is unwound from the drum for cargo handling machinery. This is also effective when the limit switch is operated by rotating in accordance with the change in the tension of the rope.
The present invention further includes a rope presser mechanism for pressing a rope wound around the drum for a cargo handling machine, wherein the rope presser mechanism is connected to a rope wound around a central portion of a drum body portion of the drum for a cargo handling machine. It is also effective in the case of having a rope presser roller formed in a shape that does not come into contact with the rope wound around both ends of the drum main body of the cargo handling machine drum while making contact and pressing.
In the present invention, the drum drive mechanism includes a DC or AC motor, and the control unit includes a rotation control unit that sets acceleration time and deceleration time of the motor, and an addition set in the rotation control unit. An acceleration / deceleration waveform control unit that determines a soft acceleration waveform and a soft deceleration waveform of the motor based on a deceleration signal, and a PWM generation unit that generates a PWM waveform based on a drive waveform signal from the acceleration / deceleration waveform control unit. Even when the cargo handling machine drum is lowered, the motor is driven by PWM control using the rotation control unit, the acceleration / deceleration waveform control unit, and the PWM generation unit. It is effective.
本発明では、前記ガイド部が、前記ロープの半径と同等若しくは前記ロープの半径より大きな曲率半径を有する断面円弧形状に形成されている場合にも効果的である。
本発明では、前記ガイド部の間に、前記ロープを支持するための支持部が設けられている場合にも効果的である。
本発明では、前記ドラム本体部に前記ロープの先端部を収容して固定するための凹部状のロープ収容部を有し、前記ロープ収容部から当該ロープを引き出す際に当該ロープを案内する部分の形状に対応するように先端部に曲げ加工を施したロープを前記ドラム本体部のロープ収容部に収容して固定するように構成されている場合にも効果的である。
また、本発明は、上述したいずれかの荷役機械用ドラムと、前記荷役機械用ドラムを回転駆動させるドラム駆動機構と、前記ドラム駆動機構の動作を制御する制御部とを有する荷役機械である。
本発明では、前記荷役機械用ドラムに巻き付ける際又は巻き付けられたロープを当該ドラムの回転軸線方向に案内移動させるためのロープ送り機構を更に有し、当該ロープ送り機構は、前記荷役機械用ドラムの回転軸線と平行に設けられ、前記荷役機械用ドラムと共に回転可能な棒状のロープ往復送りねじと、前記ロープ往復送りねじのねじ部と噛み合うように装着され、前記ロープ往復送りねじの回転に伴って当該ロープ往復送りねじの長手方向に移動するように構成されるとともに、前記荷役機械用ドラムから巻き出されたロープを案内するロープ案内部を有するブロック状の移動体と、前記ロープ往復送りねじと平行に設けられ、前記移動体と接触して当該移動体を案内するための棒状のガイド軸とを有し、前記ガイド軸が回転可能に構成されている場合にも効果的である。
本発明では、前記荷役機械用ドラムから巻き出されたロープの逆巻状態を検知するロープ逆巻検知機構を更に有し、前記逆巻検知機構は、前記荷役機械用ドラムから巻き出されたロープに接触するとともに、前記移動体に回転移動可能に取り付けられ、その回転移動によってリミットスイッチを動作させるリミットレバーユニットを有し、当該リミットレバーユニットは、前記荷役機械用ドラムから巻き出されたロープの経路の変位に応じて回転移動することによって前記リミットスイッチを動作させるように構成されている場合にも効果的である。
本発明では、前記荷役機械用ドラムから巻き出されたロープの無負荷状態を検知する無負荷検知機構を更に有し、前記無負荷検知機構は、前記荷役機械用ドラムから巻き出されたロープに接触するとともに、前記移動体に回転移動可能に取り付けられ、その回転移動によってリミットスイッチを動作させる無負荷検知レバーユニットを有し、当該無負荷検知レバーユニットは、前記荷役機械用ドラムから巻き出されたロープの張力の変化に応じて回転移動することによって前記リミットスイッチを動作させるように構成されている場合にも効果的である。
本発明では、前記荷役機械用ドラムに巻き付けられたロープを押えるロープ押え機構を更に有し、前記ロープ押え機構は、前記荷役機械用ドラムのドラム本体部の中央部分に巻き付けられたロープに対して接触して押圧する一方で、前記荷役機械用ドラムのドラム本体部の両端部に巻き付けられたロープに対して接触しない形状に形成されたロープ押えローラを有する場合にも効果的である。
本発明では、前記ドラム駆動機構は、DC又はAC方式のモータを有するとともに、前記制御部は、前記モータの加速時間及び減速時間の設定する回転制御部と、当該回転制御部において設定された加減速信号に基づいて前記モータのソフト加速波形とソフト減速波形を決定する加減速波形制御部と、当該加減速波形制御部からの駆動波形信号に基づいてPWM波形を生成するPWM生成部とを有し、前記荷役機械用ドラムの巻下げの際に、前記回転制御部、前記加減速波形制御部及び前記PWM生成部を用いたPWM制御によって前記モータを駆動させるように構成されている場合にも効果的である。 In order to achieve the above object, the present invention is a drum for a cargo handling machine capable of winding a rope in multiple stages by parallel winding, for supporting and guiding the rope on the surface of a cylindrical drum body. The plurality of convex curved guide portions are cargo handling machine drums provided at predetermined intervals along the circumferential direction of the drum main body portion.
The present invention is also effective when the guide portion is formed in a circular arc shape having a radius of curvature equal to or greater than the radius of the rope.
In this invention, it is effective also when the support part for supporting the said rope is provided between the said guide parts.
In the present invention, the drum main body portion has a concave rope accommodating portion for accommodating and fixing the tip end portion of the rope, and a portion for guiding the rope when the rope is pulled out from the rope accommodating portion. It is also effective in the case where a rope whose end is bent so as to correspond to the shape is accommodated and fixed in the rope accommodating portion of the drum main body.
Further, the present invention is a cargo handling machine including any of the above-described drums for a cargo handling machine, a drum drive mechanism that rotationally drives the drum for a cargo handling machine, and a control unit that controls the operation of the drum drive mechanism.
The present invention further includes a rope feeding mechanism for guiding or moving the rope wound around or around the drum of the cargo handling machine in the direction of the axis of rotation of the drum. A rod-shaped rope reciprocating feed screw which is provided in parallel with the rotation axis and is rotatable with the drum for cargo handling machine, and a threaded portion of the rope reciprocating feed screw are mounted, and with the rotation of the rope reciprocating feed screw A block-shaped moving body configured to move in the longitudinal direction of the rope reciprocating feed screw and having a rope guide portion for guiding a rope unwound from the drum for a cargo handling machine, and the rope reciprocating feed screw; A rod-shaped guide shaft that is provided in parallel and guides the movable body in contact with the movable body, the guide shaft being rotatable If you have been made it is also effective.
The present invention further includes a rope reverse winding detection mechanism for detecting a reverse winding state of the rope unwound from the cargo handling machine drum, wherein the reverse winding detection mechanism is a rope unwound from the cargo handling machine drum. And a limit lever unit that is rotatably attached to the movable body and that operates a limit switch by the rotational movement. The limit lever unit is a rope that is unwound from the drum for a cargo handling machine. This is also effective when the limit switch is operated by rotating according to the displacement of the path.
In the present invention, it further has a no-load detection mechanism for detecting an unloaded state of the rope unwound from the drum for the cargo handling machine, and the no-load detection mechanism is provided on the rope unwound from the drum for the cargo handling machine. And a loadless lever unit that is attached to the movable body so as to be able to rotate and that operates a limit switch by the rotational movement. The loadless lever unit is unwound from the drum for cargo handling machinery. This is also effective when the limit switch is operated by rotating in accordance with the change in the tension of the rope.
The present invention further includes a rope presser mechanism for pressing a rope wound around the drum for a cargo handling machine, wherein the rope presser mechanism is connected to a rope wound around a central portion of a drum body portion of the drum for a cargo handling machine. It is also effective in the case of having a rope presser roller formed in a shape that does not come into contact with the rope wound around both ends of the drum main body of the cargo handling machine drum while making contact and pressing.
In the present invention, the drum drive mechanism includes a DC or AC motor, and the control unit includes a rotation control unit that sets acceleration time and deceleration time of the motor, and an addition set in the rotation control unit. An acceleration / deceleration waveform control unit that determines a soft acceleration waveform and a soft deceleration waveform of the motor based on a deceleration signal, and a PWM generation unit that generates a PWM waveform based on a drive waveform signal from the acceleration / deceleration waveform control unit. Even when the cargo handling machine drum is lowered, the motor is driven by PWM control using the rotation control unit, the acceleration / deceleration waveform control unit, and the PWM generation unit. It is effective.
本発明によれば、ドラムに巻き付けられたロープの巻上げ及び巻下げを行う際に、ロープに損傷を与えず、安全に対処できるドラムを提供するとともに、ロープ寿命を延ばすことができる。
According to the present invention, it is possible to provide a drum that can be safely handled without damaging the rope when the rope wound around the drum is wound up and down, and the life of the rope can be extended.
以下、本発明を実施するための形態について図面を参照して説明する。
図1(a)は、本発明に係る荷役機械であるホイストの実施の形態の外観構成を示す正面図、図1(b)は、同ホイストの外観構成を示す側面図である。
図1(a)(b)に示すように、本実施の形態のホイスト1は、工場等で用いられるもので、例えば高所に設けられた支持軸2に支持用フック3によって吊り下げるように構成されている。 Hereinafter, embodiments for carrying out the present invention will be described with reference to the drawings.
Fig.1 (a) is a front view which shows the external appearance structure of embodiment of the hoist which is a cargo handling machine based on this invention, FIG.1 (b) is a side view which shows the external appearance structure of the hoist.
As shown in FIGS. 1 (a) and 1 (b), the hoist 1 of the present embodiment is used in a factory or the like. For example, the hoist 1 is hung by asupport hook 3 on a support shaft 2 provided at a high place. It is configured.
図1(a)は、本発明に係る荷役機械であるホイストの実施の形態の外観構成を示す正面図、図1(b)は、同ホイストの外観構成を示す側面図である。
図1(a)(b)に示すように、本実施の形態のホイスト1は、工場等で用いられるもので、例えば高所に設けられた支持軸2に支持用フック3によって吊り下げるように構成されている。 Hereinafter, embodiments for carrying out the present invention will be described with reference to the drawings.
Fig.1 (a) is a front view which shows the external appearance structure of embodiment of the hoist which is a cargo handling machine based on this invention, FIG.1 (b) is a side view which shows the external appearance structure of the hoist.
As shown in FIGS. 1 (a) and 1 (b), the hoist 1 of the present embodiment is used in a factory or the like. For example, the hoist 1 is hung by a
ホイスト1は、後述するドラム10等が収容される装置本体部4を有し、ドラム10から巻き出されたロープ20が、装置本体部4の下部の本体フレーム4aから下方に導出され、ロープ20の先端部に設けられたフック6を上方又は下方に移動させるようになっている。
The hoist 1 has an apparatus main body 4 in which a drum 10 and the like to be described later are accommodated. A rope 20 unwound from the drum 10 is led downward from a main body frame 4a at the lower part of the apparatus main body 4, and the rope 20 The hook 6 provided at the front end portion is moved upward or downward.
ここで、フック6の上部には、ロープ20の張力を調整するための中空の錘5が着脱自在に装着されている。
装置本体部4の一方の側部には、ドラム10を回転させるためのDC又はAC方式のモータ7が設けられ、装置本体部4の他方の側部には、ドラム10の回転速度を制御するための駆動機構部8が設けられている。 Here, ahollow weight 5 for adjusting the tension of the rope 20 is detachably mounted on the hook 6.
A DC orAC motor 7 for rotating the drum 10 is provided on one side of the apparatus body 4, and the rotation speed of the drum 10 is controlled on the other side of the apparatus body 4. A drive mechanism unit 8 is provided.
装置本体部4の一方の側部には、ドラム10を回転させるためのDC又はAC方式のモータ7が設けられ、装置本体部4の他方の側部には、ドラム10の回転速度を制御するための駆動機構部8が設けられている。 Here, a
A DC or
駆動機構部8内には、それぞれ図示しない減速機、クラッチ機構、ブレーキ機構等が設けられている。
一方、本体フレーム4aの前面に制御部9が設けられている。
この制御部9は、モータ7の駆動を制御するもので、制御部9に接続された操作スイッチ9aによってモータ7の回転等を制御するようになっている。 In thedrive mechanism unit 8, a reduction gear, a clutch mechanism, a brake mechanism, and the like (not shown) are provided.
On the other hand, acontrol unit 9 is provided on the front surface of the main body frame 4a.
Thecontrol unit 9 controls the driving of the motor 7, and controls the rotation of the motor 7 by an operation switch 9 a connected to the control unit 9.
一方、本体フレーム4aの前面に制御部9が設けられている。
この制御部9は、モータ7の駆動を制御するもので、制御部9に接続された操作スイッチ9aによってモータ7の回転等を制御するようになっている。 In the
On the other hand, a
The
図2は、本実施の形態におけるドラムの外観構成を示す正面図である。
また、図3(a)(b)は、同ドラムにおけるドラム本体部の外観構成を示す正面図で、図3(a)は一方側から見た図、図3(b)は他方側から見た図である。 FIG. 2 is a front view showing an external configuration of the drum in the present embodiment.
3 (a) and 3 (b) are front views showing the external configuration of the drum body of the drum, FIG. 3 (a) is a view from one side, and FIG. 3 (b) is a view from the other side. It is a figure.
また、図3(a)(b)は、同ドラムにおけるドラム本体部の外観構成を示す正面図で、図3(a)は一方側から見た図、図3(b)は他方側から見た図である。 FIG. 2 is a front view showing an external configuration of the drum in the present embodiment.
3 (a) and 3 (b) are front views showing the external configuration of the drum body of the drum, FIG. 3 (a) is a view from one side, and FIG. 3 (b) is a view from the other side. It is a figure.
さらに、図4は、同ドラム本体部の展開図、図5は、同ドラム本体部の直線部及び交差部を説明するための側面図、図6は、同ドラム本体部の支持部の配置構成を示す説明図である。
4 is a development view of the drum main body, FIG. 5 is a side view for explaining a straight portion and an intersection of the drum main body, and FIG. 6 is an arrangement configuration of support portions of the drum main body. It is explanatory drawing which shows.
図2に示すように、本実施の形態のドラム(荷役機械用ドラム)10は、円筒形状のドラム本体部11を有し、このドラム本体部11の両端部に、第1及び第2のフランジ10a、10bがそれぞれ平行に設けられている。
そして、ドラム本体部11にロープ20が平行巻で多層に巻き付けられるようになっている。 As shown in FIG. 2, a drum (handling machine drum) 10 of the present embodiment has acylindrical drum body 11, and first and second flanges are provided at both ends of the drum body 11. 10a and 10b are provided in parallel.
Therope 20 is wound around the drum main body 11 in multiple layers in parallel.
そして、ドラム本体部11にロープ20が平行巻で多層に巻き付けられるようになっている。 As shown in FIG. 2, a drum (handling machine drum) 10 of the present embodiment has a
The
図3(a)(b)に示すように、ドラム本体部11は、その表面に、複数の凸曲面形状のガイド部12が、円周方向に沿って所定の間隔で設けられている。
本実施の形態の場合、各ガイド部12は、断面形状が円弧形状に形成され、各ガイド部12の間には、例えば平面状の支持部13が設けられている。 As shown in FIGS. 3A and 3B, thedrum body 11 has a plurality of convex curved guide portions 12 provided on the surface thereof at predetermined intervals along the circumferential direction.
In the case of the present embodiment, eachguide portion 12 is formed in an arc shape in cross section, and a planar support portion 13 is provided between the guide portions 12, for example.
本実施の形態の場合、各ガイド部12は、断面形状が円弧形状に形成され、各ガイド部12の間には、例えば平面状の支持部13が設けられている。 As shown in FIGS. 3A and 3B, the
In the case of the present embodiment, each
図3~図6に示すように、ドラム本体部11の表面の領域は、第1の直線部14、第2の直線部15、第1の交差部(クロスオーバー部)16、第2の交差部(クロスオーバー部)17の領域に分けられる。
第1及び第2の直線部14、15では、ガイド部12及び支持部13が、ドラム本体部11の円周方向即ち回転軸線に対して直交する方向に沿って直線状に平行に形成されている。 As shown in FIGS. 3 to 6, the surface area of the drummain body 11 includes a first straight portion 14, a second straight portion 15, a first intersecting portion (crossover portion) 16, and a second intersecting portion. It is divided into regions (crossover portions) 17.
In the first and second linear portions 14 and 15, the guide portion 12 and the support portion 13 are formed in a straight line and parallel along the circumferential direction of the drum body portion 11, that is, the direction orthogonal to the rotation axis. Yes.
第1及び第2の直線部14、15では、ガイド部12及び支持部13が、ドラム本体部11の円周方向即ち回転軸線に対して直交する方向に沿って直線状に平行に形成されている。 As shown in FIGS. 3 to 6, the surface area of the drum
In the first and second
一方、第1及び第2の交差部16、17では、ガイド部12及び支持部13が、後述するように、ドラム本体部11の円周方向即ち回転軸線に対して同一方向に所定角度傾斜して直線状に平行に形成されている。
On the other hand, at the first and second intersecting portions 16 and 17, the guide portion 12 and the support portion 13 are inclined at a predetermined angle in the same direction with respect to the circumferential direction of the drum body portion 11, that is, the rotation axis, as will be described later. Are formed in parallel in a straight line.
ここでは、第1及び第2の直線部14、15と、第1及び第2の交差部16、17とは、ドラム本体部11の表面上においてそれぞれ対称となるように設けられ、例えば第2の交差部17に設けられたロープ取出口11aを基準として、ロープ20の巻付方向Kに向って、第1の直線部14、第1の交差部16、第2の直線部15、第2の交差部17の順序で設けられている(図4、図5参照)。
なお、第1及び第2の直線部14、15は、同一の長さに形成され、また、第1及び第2の交差部16、17の長さも同一の長さに形成されている。 Here, the first and second straight portions 14 and 15 and the first and second intersecting portions 16 and 17 are provided so as to be symmetrical on the surface of the drum main body 11, respectively. The first straight portion 14, the first crossing portion 16, the second straight portion 15, and the second straight portion 14 in the winding direction K of the rope 20 with reference to the rope outlet 11 a provided at the crossing portion 17. Are provided in the order of the intersections 17 (see FIGS. 4 and 5).
In addition, the 1st and 2nd linear parts 14 and 15 are formed in the same length, and the length of the 1st and 2nd intersection parts 16 and 17 is also formed in the same length.
なお、第1及び第2の直線部14、15は、同一の長さに形成され、また、第1及び第2の交差部16、17の長さも同一の長さに形成されている。 Here, the first and second
In addition, the 1st and 2nd
さらに、第1及び第2の直線部14、15は、第1及び第2の交差部16、17の長さよりそれぞれ長くなるように設定されている。
ドラム本体部11の第1及び第2の交差部16、17においては、各ガイド部12及び支持部13が、その起点から終点の間において、それぞれ1/2ピッチPだけ当該円筒の回転軸線方向(幅方向)にずれるように傾斜させて設けられている。
ここで、ガイド部12及び支持部13のピッチPは、各ガイド部12の頂部の間の距離を意味する(図6、図7(a)参照)。 Further, the first and second straight portions 14 and 15 are set to be longer than the lengths of the first and second intersecting portions 16 and 17, respectively.
In the first and second intersecting portions 16 and 17 of the drum main body 11, the guide portions 12 and the support portions 13 are respectively in the direction of the rotation axis of the cylinder by ½ pitch P between the starting point and the ending point. Inclined so as to be displaced in the (width direction).
Here, the pitch P of theguide part 12 and the support part 13 means the distance between the top parts of each guide part 12 (refer FIG. 6, FIG. 7 (a)).
ドラム本体部11の第1及び第2の交差部16、17においては、各ガイド部12及び支持部13が、その起点から終点の間において、それぞれ1/2ピッチPだけ当該円筒の回転軸線方向(幅方向)にずれるように傾斜させて設けられている。
ここで、ガイド部12及び支持部13のピッチPは、各ガイド部12の頂部の間の距離を意味する(図6、図7(a)参照)。 Further, the first and second
In the first and
Here, the pitch P of the
このような構成により、図4~6に示すように、例えば第1の直線部14から第1の交差部16を介して第2の直線部15に移る際に、各ガイド部12及び支持部13が、それぞれ1/2ピッチPだけ当該円筒の回転軸線方向にずれ、さらに、第2の直線部15から第2の交差部17を介して第1の直線部14に移る際に、各ガイド部12及び支持部13が、それぞれ1/2ピッチPだけ当該円筒の回転軸線方向にずれ、ドラム本体部11を一周した場合に、各ガイド部12及び支持部13が、当該円筒の回転軸線方向に1ピッチPずらして連続するように設けられている。
With such a configuration, as shown in FIGS. 4 to 6, for example, when moving from the first straight portion 14 to the second straight portion 15 via the first intersecting portion 16, each guide portion 12 and support portion Each guide 13 shifts in the rotational axis direction of the cylinder by ½ pitch P, and further moves from the second straight portion 15 to the first straight portion 14 via the second intersecting portion 17. When the part 12 and the support part 13 are displaced by 1/2 pitch P in the rotation axis direction of the cylinder and make a round of the drum main body part 11, each guide part 12 and the support part 13 are in the rotation axis direction of the cylinder. Are arranged so as to be shifted by one pitch P.
図6に示すように、本実施の形態においては、ドラム本体部11の第1及び第2の直線部14、15に、ロープ20の平行巻を円滑に行うため、その端部に、後述する、第1のガイド部12aと、第2のガイド部12bが設けられている。
これら第1及び第2のガイド部12a、12bは、ドラム本体部11の第1の直線部14と第2の直線部15とでは、逆の位置に設けられている。 As shown in FIG. 6, in the present embodiment, therope 20 is smoothly wound around the first and second straight portions 14 and 15 of the drum main body portion 11, and the end portion thereof will be described later. The 1st guide part 12a and the 2nd guide part 12b are provided.
The first and second guide portions 12 a and 12 b are provided at opposite positions in the first straight portion 14 and the second straight portion 15 of the drum main body portion 11.
これら第1及び第2のガイド部12a、12bは、ドラム本体部11の第1の直線部14と第2の直線部15とでは、逆の位置に設けられている。 As shown in FIG. 6, in the present embodiment, the
The first and
図7(a)~(c)は、本発明において、ドラム本体部におけるガイド部及び支持部の構成及び寸法関係を示す説明図であり、図7(d)(e)は、第1及び第2のガイド部の構成を示す説明図である。
FIGS. 7A to 7C are explanatory views showing the configuration and dimensional relationship of the guide part and the support part in the drum main body part in the present invention, and FIGS. 7D and 7E show the first and first parts. It is explanatory drawing which shows the structure of 2 guide parts.
本発明では、ドラム本体部11に巻き付けられたロープ20は、凸状に形成された隣接する一対のガイド部12によってその下部が2点で支持される(図7(a)参照)。
本発明では、ガイド部12のピッチPは、ロープ20の直径φより若干大きくなるように設定する(図7(a)参照)。 In the present invention, the lower portion of therope 20 wound around the drum main body 11 is supported at two points by a pair of adjacent guide portions 12 formed in a convex shape (see FIG. 7A).
In the present invention, the pitch P of theguide portion 12 is set to be slightly larger than the diameter φ of the rope 20 (see FIG. 7A).
本発明では、ガイド部12のピッチPは、ロープ20の直径φより若干大きくなるように設定する(図7(a)参照)。 In the present invention, the lower portion of the
In the present invention, the pitch P of the
この理由は、ドラム本体部11に巻き付けられた隣接する第1層目のロープ20の間に若干の間隔を設け、ロープ20の多層巻取を円滑に行うためである。
この場合、好ましいガイド部12のピッチPは、ロープ20の直径φの1.03~1.05倍である。 The reason for this is to provide a slight gap between the adjacentfirst layer ropes 20 wound around the drum main body 11 so that the ropes 20 can be smoothly wound in multiple layers.
In this case, the preferable pitch P of theguide portion 12 is 1.03 to 1.05 times the diameter φ of the rope 20.
この場合、好ましいガイド部12のピッチPは、ロープ20の直径φの1.03~1.05倍である。 The reason for this is to provide a slight gap between the adjacent
In this case, the preferable pitch P of the
また、ガイド部12の曲率半径R、幅D及び高さH、並びに、ガイド部12間の支持部13の幅dについては、ロープ20をドラム本体部11に巻き付けた際に、第1層目のロープ20と支持部13との間の距離を考慮して設定する。
この場合、好ましいガイド部12の曲率半径Rは、ロープ20の直径φの1/2である。 Further, the curvature radius R, width D and height H of theguide portion 12 and the width d of the support portion 13 between the guide portions 12 are the first layer when the rope 20 is wound around the drum body portion 11. The distance between the rope 20 and the support portion 13 is set in consideration.
In this case, the preferred curvature radius R of theguide portion 12 is ½ of the diameter φ of the rope 20.
この場合、好ましいガイド部12の曲率半径Rは、ロープ20の直径φの1/2である。 Further, the curvature radius R, width D and height H of the
In this case, the preferred curvature radius R of the
また、ガイド部12の高さH(支持部13からの距離)は、隣接する一対のガイド部12によってロープ20が支持された場合に、ロープ20の下部と支持部13との間の間隔hを考慮して設定する(図7(b)(c)参照)。
The height H of the guide portion 12 (distance from the support portion 13) is the distance h between the lower portion of the rope 20 and the support portion 13 when the rope 20 is supported by a pair of adjacent guide portions 12. (See FIGS. 7B and 7C).
一方、上述したように、ドラム本体部11の第1及び第2の直線部14、15の端部には、第1のガイド部12aと、第2のガイド部12bが設けられている(図6参照)。
第1のガイド部12aと第2のガイド部12bは、以下に説明するように、形状及び大きさが異なるように形成されている(図7(d)参照)。 On the other hand, as described above, thefirst guide portion 12a and the second guide portion 12b are provided at the ends of the first and second linear portions 14 and 15 of the drum main body portion 11 (see FIG. 6).
As described below, thefirst guide portion 12a and the second guide portion 12b are formed so as to have different shapes and sizes (see FIG. 7D).
第1のガイド部12aと第2のガイド部12bは、以下に説明するように、形状及び大きさが異なるように形成されている(図7(d)参照)。 On the other hand, as described above, the
As described below, the
第1のガイド部12aは、ドラム本体部11の一方の端部の支持部13と連続して形成され、ガイド部12を中央部分を基準として2分割したような形状で、その端部の高さが最も高くなるように構成されている。
この第1のガイド部12aの端部は、第1又は第2のフランジ10a、10bの内側面と面一になっている(図6参照)。 Thefirst guide portion 12a is formed continuously with the support portion 13 at one end portion of the drum main body portion 11, and has a shape such that the guide portion 12 is divided into two with respect to the central portion, and the height of the end portion is increased. Is configured to be the highest.
The end portion of thefirst guide portion 12a is flush with the inner surface of the first or second flange 10a, 10b (see FIG. 6).
この第1のガイド部12aの端部は、第1又は第2のフランジ10a、10bの内側面と面一になっている(図6参照)。 The
The end portion of the
この第1のガイド部12aは、隣接するガイド部12と共に第1層目の端部のロープ20を支持するものであり、したがって、当該ロープ20を確実に案内支持する観点からは、第1のガイド部12aの形状は、ガイド部12の傾斜面と同等の形状に形成することが好ましい。
The first guide portion 12a supports the rope 20 at the end of the first layer together with the adjacent guide portion 12. Therefore, from the viewpoint of reliably guiding and supporting the rope 20, the first guide portion 12a The guide portion 12a is preferably formed in the same shape as the inclined surface of the guide portion 12.
さらに、第1のガイド部12aの幅及び高さは、第1のガイド部12aと、隣接するガイド部12によって第1層目のロープ20を支持した場合に、ロープ20の当該フランジ側の側部が第1又は第2のフランジ10a、10bに接触して支持されるように設定することが好ましい。
Further, the width and height of the first guide portion 12a are determined so that the first guide portion 12a and the adjacent guide portion 12 support the first layer of rope 20 on the flange side of the rope 20. It is preferable to set so that the portion is supported in contact with the first or second flange 10a, 10b.
一方、第2のガイド部12bは、ドラム本体部11の他方の端部の支持部13と連続して形成された下側ガイド部12b1と、この下側ガイド部12b1と連続して上部に形成された上側ガイド部12b2とを有している(図7(e)参照)。
On the other hand, the second guide portion 12b includes a lower guide portion 12b 1 formed continuously with the support portion 13 at the other end of the drum body portion 11, and an upper portion continuous with the lower guide portion 12b 1. and a upper guide portion 12b 2 formed in (see FIG. 7 (e)).
第2のガイド部12bの下側ガイド部12b1は、隣接するガイド部12と共に第1層目の端部のロープ20を支持するものであり、したがって、当該ロープ20を確実に案内支持する観点からは、下側ガイド部12b1の形状は、ガイド部12の傾斜面と同等の形状、すなわち、ガイド部12と同一の曲率半径Rで形成することが好ましい。
The lower guide portion 12b 1 of the second guide portion 12b supports the rope 20 at the end of the first layer together with the adjacent guide portion 12, and therefore the viewpoint of reliably guiding and supporting the rope 20 From the above, it is preferable that the shape of the lower guide portion 12b 1 is the same as the inclined surface of the guide portion 12, that is, the same radius of curvature R as that of the guide portion 12.
一方、第2のガイド部12bの上側ガイド部12b2は、後述するように、第1層目の端部のロープ20と共に第2層目の端部のロープ20を支持するものであり、したがって、当該ロープ20を確実に案内支持する観点からは、上側ガイド部12b2の形状は、ガイド部12と同一の曲率半径Rで形成することが好ましい。
そして、この第2のガイド部12bの上側ガイド部12b2の端部は、第1又は第2のフランジ10a、10bの内側面と面一になっている(図6参照)。 On the other hand, theupper guide portion 12b 2 of the second guide portion 12b supports the rope 20 at the end of the second layer together with the rope 20 at the end of the first layer, as will be described later. From the viewpoint of reliably guiding and supporting the rope 20, the shape of the upper guide portion 12 b 2 is preferably formed with the same radius of curvature R as the guide portion 12.
The end portion of theupper guide portion 12b 2 of the second guide portion 12b is flush with the inner surface of the first or second flange 10a, 10b (see FIG. 6).
そして、この第2のガイド部12bの上側ガイド部12b2の端部は、第1又は第2のフランジ10a、10bの内側面と面一になっている(図6参照)。 On the other hand, the
The end portion of the
第2のガイド部12bの幅及び高さは、上側ガイド部12b2と第1層目の端部のロープ20によって第2層目のロープ20を支持した場合に、第2層目のロープ20のフランジ側の側部が第1又は第2のフランジ10a、10bに接触するように設定することが好ましい。
The width and height of the second guide portion 12b are such that when the second layer rope 20 is supported by the upper guide portion 12b 2 and the rope 20 at the end of the first layer, the second layer rope 20 is provided. It is preferable to set the side of the flange side so as to contact the first or second flange 10a, 10b.
なお、本実施の形態において、具体的には、ロープ20の直径φは、5.2mmである。
また、ガイド部12のピッチPは、5.4mmであり、ガイド部12の曲率半径Rは、2.5~2.6mmであり、ガイド部12の幅Dは、約4mmであり、ガイド部12の高さHは、約1mmである。 In the present embodiment, specifically, the diameter φ of therope 20 is 5.2 mm.
The pitch P of theguide portion 12 is 5.4 mm, the curvature radius R of the guide portion 12 is 2.5 to 2.6 mm, and the width D of the guide portion 12 is about 4 mm. The height H of 12 is about 1 mm.
また、ガイド部12のピッチPは、5.4mmであり、ガイド部12の曲率半径Rは、2.5~2.6mmであり、ガイド部12の幅Dは、約4mmであり、ガイド部12の高さHは、約1mmである。 In the present embodiment, specifically, the diameter φ of the
The pitch P of the
次に、本発明に係るドラムの原理について、従来技術との対比において説明する。
図8(a)~(d)は、従来技術のドラム本体部の断面構成及び原理を模式的に示す図である。 Next, the principle of the drum according to the present invention will be described in comparison with the prior art.
FIGS. 8A to 8D are diagrams schematically showing a cross-sectional configuration and principle of a drum main body according to the prior art.
図8(a)~(d)は、従来技術のドラム本体部の断面構成及び原理を模式的に示す図である。 Next, the principle of the drum according to the present invention will be described in comparison with the prior art.
FIGS. 8A to 8D are diagrams schematically showing a cross-sectional configuration and principle of a drum main body according to the prior art.
また、図9(a)~(c)は、本発明のドラム本体部の原理を模式的に示す図である。
図8(a)に示すように、従来技術の場合は、ドラム本体部111の表面に、案内溝113が設けられている。ここで、隣接する案内溝113の間には、曲率の小さな鋭角な突部112が形成されている。 FIGS. 9A to 9C are diagrams schematically showing the principle of the drum main body of the present invention.
As shown in FIG. 8A, in the case of the conventional technique, aguide groove 113 is provided on the surface of the drum main body 111. Here, between the adjacent guide grooves 113, an acute-angle protrusion 112 having a small curvature is formed.
図8(a)に示すように、従来技術の場合は、ドラム本体部111の表面に、案内溝113が設けられている。ここで、隣接する案内溝113の間には、曲率の小さな鋭角な突部112が形成されている。 FIGS. 9A to 9C are diagrams schematically showing the principle of the drum main body of the present invention.
As shown in FIG. 8A, in the case of the conventional technique, a
この案内溝113は、直径d0を有するロープ120の半径r0より若干大きい曲率半径r1を有する断面円弧形状に形成され、ドラム本体部111の円周に沿って設けられている。
The guide groove 113 is formed in a circular arc shape having a radius of curvature r 1 slightly larger than the radius r 0 of the rope 120 having a diameter d 0 , and is provided along the circumference of the drum body 111.
ここで、案内溝113の曲率半径r1は、0.535d0以上で、0.56d0以下となっている。
また、案内溝113の深さH0は、0.28d0以上で、0.45d0以下となっている。 Here, the radius of curvature r 1 of theguide groove 113 is 0.535 d 0 or more and 0.56 d 0 or less.
The depth H 0 of theguide groove 113 is 0.28d 0 or more and 0.45d 0 or less.
また、案内溝113の深さH0は、0.28d0以上で、0.45d0以下となっている。 Here, the radius of curvature r 1 of the
The depth H 0 of the
ドラム本体部111には、本発明と同様に、第1及び第2の直線部14、15及び第1及び第2の交差部16、17において、各案内溝113が、互いに1/2ピッチずらして設けられ、ドラム本体部111を一周した場合に、各案内溝113が、1ピッチずらして連続するように設けられている。
In the drum main body 111, the guide grooves 113 are shifted from each other by ½ pitch in the first and second linear portions 14, 15 and the first and second intersecting portions 16, 17 in the same manner as in the present invention. When the drum main body 111 is made a round, the guide grooves 113 are provided so as to be continued with a shift of one pitch.
そして、本発明と同様の方法により、案内溝113に沿ってロープ120を巻き付け、第1及び第2の交差部16、17においてロープ120を下層のロープ120の傾斜方向と反対方向に傾斜させて乗り上げさせることによって巻き付けられるようになっている。
Then, the rope 120 is wound along the guide groove 113 by the same method as the present invention, and the rope 120 is inclined in the direction opposite to the inclination direction of the lower rope 120 at the first and second intersecting portions 16 and 17. It is designed to be wound up by riding it.
このような従来技術では、ドラム本体部111に巻き付けられたロープ120から、案内溝113の底部に対し断面に関して1点で荷重Fが作用し、ロープ120に対しては、案内溝113の底部から断面に関して作図上は1点でその反力fが作用する(図8(b)参照)。
In such a conventional technique, the load F acts on the cross section of the rope 120 wound around the drum main body 111 from the bottom of the guide groove 113 to the bottom of the guide groove 113 with respect to the cross section. The reaction force f acts on the cross section at one point on the drawing (see FIG. 8B).
この場合、ロープ120は弾性体であるから1点で力が作用することはないが、説明を解りやすくするため、以下剛体であるとして説明する。
上述したように、従来技術では、案内溝113の曲率半径r1が、ロープ120の半径r0より大きくなるように構成されているため(図8(a)参照)、ロープ120に対して例えば斜め上方からの荷重F0が作用すると、その荷重F0の水平分力により、ロープ120は案内溝113上を回転して横方向に移動し、案内溝113の縁部113aとの間に隙間a1が生ずる(図8(c)参照)。 In this case, since therope 120 is an elastic body, a force does not act at one point, but in order to make the explanation easy to understand, it will be described as a rigid body.
As described above, in the prior art, the radius of curvature r 1 of theguide groove 113 is configured to be larger than the radius r 0 of the rope 120 (see FIG. 8A). When a load F 0 from obliquely above acts, the rope 120 rotates on the guide groove 113 by the horizontal component force of the load F 0 and moves laterally, and a gap is formed between the edge 113a of the guide groove 113. a 1 is generated (see FIG. 8C).
上述したように、従来技術では、案内溝113の曲率半径r1が、ロープ120の半径r0より大きくなるように構成されているため(図8(a)参照)、ロープ120に対して例えば斜め上方からの荷重F0が作用すると、その荷重F0の水平分力により、ロープ120は案内溝113上を回転して横方向に移動し、案内溝113の縁部113aとの間に隙間a1が生ずる(図8(c)参照)。 In this case, since the
As described above, in the prior art, the radius of curvature r 1 of the
その結果、第1層目の隣接するロープ120a、120b上に第2層目のロープ120cが巻かれた場合に、第1層目の隣接するロープ120a、120bに対する第2層目のロープ120cからの荷重F1、F2の水平分力により、第2層目のロープ120cを支持する第1層目の隣接するロープ120a、120bが案内溝113上を回転して互いに離れる方向に移動し、これら隣接するロープ120a、120bの間に隙間a2が生じてしまう。
As a result, when the second layer rope 120c is wound on the first layer adjacent ropes 120a and 120b, the second layer rope 120c with respect to the first layer adjacent ropes 120a and 120b. By the horizontal component force of the loads F 1 and F 2 , the adjacent ropes 120a and 120b of the first layer supporting the rope 120c of the second layer rotate on the guide groove 113 and move away from each other, these adjacent ropes 120a, a gap a 2 occurs during 120b.
従来技術の場合、このような現象はロープ120を巻き上げる荷物が地切りした瞬間などに発生することが多く、このとき、第1層目のロープ120は当初錘付フックによる約10%の荷重だけが加わった状態で巻かれているため、急激な張力の増大により弾性体であるロープ120が伸びて細くなることにより、上述した現象を助長する傾向になる。
In the case of the prior art, such a phenomenon often occurs at the moment when the load that winds up the rope 120 is cut off. At this time, the rope 120 of the first layer is only about 10% of the load by the hook with the initial weight. Since the rope 120, which is an elastic body, is stretched and thinned by a sudden increase in tension, the above phenomenon tends to be promoted.
そして、このようにして生じたロープ120間の隙間によりロープ120の食い込みが発生しやすくロープ120の整列を乱す原因となるため、従来技術では、案内溝113間のピッチ間隔を小さくする必要性が生じていた。
しかし、案内溝113間のピッチ間隔を小さくし過ぎると、無負荷時に膨張したロープ120同士が擦れるという問題があった。 In addition, since the gap between theropes 120 generated in this manner easily causes the rope 120 to bite and disturbs the alignment of the ropes 120, in the related art, it is necessary to reduce the pitch interval between the guide grooves 113. It was happening.
However, if the pitch interval between theguide grooves 113 is too small, there is a problem that the ropes 120 that have expanded at the time of no load rub against each other.
しかし、案内溝113間のピッチ間隔を小さくし過ぎると、無負荷時に膨張したロープ120同士が擦れるという問題があった。 In addition, since the gap between the
However, if the pitch interval between the
その他、従来技術においては、荷重をロープ120に与え、斜めにロープ120を引いたとき、ロープ120が案内溝113から外れ、鋭角な突部112を乗り越えて隣接する案内溝113、更にはその先の案内溝113に押し出されてしまう場合がある。
In addition, in the prior art, when a load is applied to the rope 120 and the rope 120 is pulled obliquely, the rope 120 is detached from the guide groove 113, passes over the acute protrusion 112, and is adjacent to the guide groove 113. The guide groove 113 may be pushed out.
その結果、突部112に接触したロープ120に損傷を生じ、ときには破断し、荷が落下することがある。このことは安全上極めて危険な状態である。
また、このような事態が生ずると、たとえロープ120が破断していない場合であっても新しいロープ120に交換する必要があり、これにより多くの時間と、費用が必要となる。 As a result, therope 120 in contact with the protrusion 112 may be damaged, sometimes ruptured, and the load may fall. This is a very dangerous situation for safety.
In addition, when such a situation occurs, even if therope 120 is not broken, it is necessary to replace it with a new rope 120, which requires much time and cost.
また、このような事態が生ずると、たとえロープ120が破断していない場合であっても新しいロープ120に交換する必要があり、これにより多くの時間と、費用が必要となる。 As a result, the
In addition, when such a situation occurs, even if the
また、従来技術では、上述した案内溝113を使用し、1層目だけロープ120を巻き付けてから多層巻きとして使用する場合があるが、この場合、1層目のロープ120は無駄であり、環境負荷の原因になる。
また、ロープ120を巻き出す際に、誤って1層目のロープ120まで巻き出してしまうこともあり、危険な状態になる場合もある。 In the conventional technique, theguide groove 113 described above is used, and the rope 120 is wound only on the first layer and then used as a multi-layer winding. However, in this case, the first layer rope 120 is useless and the environment Causes load.
Further, when therope 120 is unwound, the rope 120 may be unwound by mistake, resulting in a dangerous state.
また、ロープ120を巻き出す際に、誤って1層目のロープ120まで巻き出してしまうこともあり、危険な状態になる場合もある。 In the conventional technique, the
Further, when the
さらに、例えば数千mの長さのロープ120を海底に巻き下ろした場合において、大部分が巻き出され最後の1層目で溝から外れて破断することも考えられる。
この場合には、ほとんどのロープ120が海中に沈み、ロープ120の先端に取り付けられている測定器具や探査機器の回収は不可能となる場合がある。 Furthermore, for example, when arope 120 having a length of several thousand meters is rolled down on the seabed, it is considered that most of the rope 120 is unwound and breaks off the groove in the last first layer.
In this case, most of therope 120 may sink in the sea, and it may be impossible to collect the measuring instrument or the exploration device attached to the tip of the rope 120.
この場合には、ほとんどのロープ120が海中に沈み、ロープ120の先端に取り付けられている測定器具や探査機器の回収は不可能となる場合がある。 Furthermore, for example, when a
In this case, most of the
一般の工場で使用されているホイストでも溝から外れたときには、ロープ120が破断している場合があるので、この例のようなことが発生すれば多大な損失(時間とコスト)が発生することになる。
Even when the hoist used in a general factory is out of the groove, the rope 120 may be broken, and if this happens, a great loss (time and cost) will occur. become.
これに対し、本発明では、凸形円弧状のガイド部12を採用したことから、例えば荷の斜め引きあるいは無負荷で巻き取ったときなどに乱巻を発生させ、そのまま荷重をつり上げた時などにおいてロープ20が列から外れ、隣の列またはその先までずれた場合であっても、ガイド部12の断面形状がロープ20の半径に近く従来技術のように鋭利な形状ではないため、ロープ20に対して損傷を与えることはない。
On the other hand, in the present invention, since the convex arcuate guide portion 12 is adopted, for example, when the load is pulled diagonally or wound with no load, a turbulence is generated and the load is lifted as it is. In this case, even when the rope 20 is out of the row and is displaced to the next row or beyond, the cross-sectional shape of the guide portion 12 is close to the radius of the rope 20 and is not a sharp shape as in the prior art. Will not cause damage.
その一方、本発明においては、図9(a)に示すように、ロープ20に負荷が作用すると、ロープ20の下部に接触している、隣接する一対の凸状のガイド部12A、12Bに対して当該接触部分の接線方向即ちロープ20の両側斜め方向の荷重F10、F11が加わる。
その結果、ロープ20に対しては、各ガイド部12A、12Bから断面に関して2点でその反力f10、f11が作用する。 On the other hand, in the present invention, as shown in FIG. 9A, when a load is applied to therope 20, the pair of adjacent convex guide portions 12A and 12B that are in contact with the lower portion of the rope 20 are in contact. Thus, the loads F 10 and F 11 in the tangential direction of the contact portion, that is, the diagonal direction on both sides of the rope 20 are applied.
As a result, the reaction forces f 10 and f 11 act on therope 20 at two points with respect to the cross section from the guide portions 12A and 12B.
その結果、ロープ20に対しては、各ガイド部12A、12Bから断面に関して2点でその反力f10、f11が作用する。 On the other hand, in the present invention, as shown in FIG. 9A, when a load is applied to the
As a result, the reaction forces f 10 and f 11 act on the
このような構成を有する本発明のドラム10によれば、第1層目のロープ20が断面に関して2点で支持されることから、各ロープ20に対してセンタリング機能が働き、これにより、第1層目のロープ20の列間の間隔を安定させることができる。
According to the drum 10 of the present invention having such a configuration, the first layer rope 20 is supported at two points with respect to the cross section, so that the centering function works on each rope 20. The distance between the rows of the ropes 20 of the layer can be stabilized.
また、本発明では、図9(b)に示すように、第1層目の隣接するロープ20a、20b上に第2層目のロープ20cが巻かれた場合においては、第2層目のロープ20cからの荷重f1、f2の水平分力により、第1層目の隣接するロープ20a、20bに対して互いに離れる方向に力が働くが、第1層目の隣接するロープ20a、20bに対してそれぞれ両側のガイド部12A、12Bから互いに近づく方向の水平分力を有する荷重fa、fbが作用するため、第1層目の隣接するロープ20a、20bの間の間隔が広くなることはなく、これにより第1層目のロープ20の列間の間隔を安定させることができる。
Further, in the present invention, as shown in FIG. 9B, when the second layer rope 20c is wound on the adjacent ropes 20a and 20b of the first layer, the second layer rope is wound. The horizontal component force of loads f 1 and f 2 from 20c causes a force to move away from the adjacent ropes 20a and 20b in the first layer, but the adjacent ropes 20a and 20b in the first layer On the other hand, loads f a and f b having horizontal component forces in the direction approaching each other from the guide portions 12A and 12B on both sides act on each other, so that the interval between the adjacent ropes 20a and 20b in the first layer is widened. This can stabilize the spacing between rows of the first layer of ropes 20.
また、本発明のドラム10によれば、ロープ20からドラム本体部11に対して作用する荷重を断面に関して2点に分散して受けることができ、これによりロープ20において応力集中を緩和することができる。
In addition, according to the drum 10 of the present invention, the load acting on the drum main body 11 from the rope 20 can be distributed and received at two points with respect to the cross section, thereby reducing the stress concentration in the rope 20. it can.
また、ドラム本体部11からロープ20に作用する力を断面に関して2点に分散して受けることができ、これによりロープ20において応力集中を緩和することができる。
その結果、本発明によれば、ドラム本体部11の摩耗を減少させることができるとともに、ロープ20の寿命を延ばすことができる。 Further, the force acting on therope 20 from the drum main body 11 can be distributed and received at two points with respect to the cross section, whereby the stress concentration in the rope 20 can be relaxed.
As a result, according to the present invention, wear of the drummain body 11 can be reduced and the life of the rope 20 can be extended.
その結果、本発明によれば、ドラム本体部11の摩耗を減少させることができるとともに、ロープ20の寿命を延ばすことができる。 Further, the force acting on the
As a result, according to the present invention, wear of the drum
また、例えば地切り(地面からの切り離し)時等のようにロープ20に対して過荷重が働いた場合には、ロープ20がドラム本体部11の隣接する一対の凸状のガイド部12A、12Bに支持されるとともに、主にロープ20が圧縮変形することにより、ロープ20のドラム本体部11側の部分がドラム本体部11のガイド部12A、12Bの間の支持部13に接触して支持される(図9(c)参照)。
Further, for example, when an overload is applied to the rope 20 such as at the time of ground cutting (separation from the ground), the rope 20 is a pair of convex guide portions 12A and 12B adjacent to the drum main body portion 11. The rope 20 is mainly compressed and deformed, so that the portion of the rope 20 on the drum main body 11 side comes into contact with and is supported by the support portion 13 between the guide portions 12A and 12B of the drum main body 11. (See FIG. 9C).
これにより、ロープ20から上記ガイド部12A、12Bに対して接触部分の接線方向即ちロープ20の両側斜め方向の荷重F12、F13が加わるとともに、支持部13に対して接触部分の接線方向即ち支持部13に対して垂直方向の荷重F14が加わり、他方、ロープ20に対しては、ドラム本体部11の各ガイド部12A、12Bから反力f12、f13が作用するとともに、支持部13から反力f14が作用する。
As a result, the loads F 12 and F 13 in the tangential direction of the contact portion from the rope 20 to the guide portions 12A and 12B, that is, slanting directions on both sides of the rope 20, and the tangential direction of the contact portion to the support portion 13 A vertical load F 14 is applied to the support portion 13, while reaction forces f 12 and f 13 are applied to the rope 20 from the respective guide portions 12 A and 12 B of the drum main body portion 11. From 13, a reaction force f 14 acts.
その結果、本発明のドラム10によれば、ロープ20からドラム本体部11に対して作用する荷重を断面に関して3点に分散して受けることができるので、ロープ20において応力集中を緩和することができ、また、ドラム本体部11からロープ20に作用する力を断面に関して3点に分散して受けることができるので、ロープ20において応力集中を緩和することができる。
As a result, according to the drum 10 of the present invention, the load acting on the drum body 11 from the rope 20 can be distributed and received at three points with respect to the cross section. In addition, since the force acting on the rope 20 from the drum body 11 can be distributed and received at three points with respect to the cross section, stress concentration in the rope 20 can be reduced.
このような本発明によれば、ロープ20に対して過荷重が働いた場合であっても、ドラム本体部11の摩耗を減少させることができるとともに、ロープ20の寿命を延ばすことができる。
なお、本発明の場合、支持部13の形状は上述した平面に限られず、凸面状又は凹面状とすることもできるものである。 According to the present invention as described above, even when an overload is applied to therope 20, the wear of the drum body 11 can be reduced and the life of the rope 20 can be extended.
In the case of the present invention, the shape of thesupport portion 13 is not limited to the above-described plane, but may be a convex shape or a concave shape.
なお、本発明の場合、支持部13の形状は上述した平面に限られず、凸面状又は凹面状とすることもできるものである。 According to the present invention as described above, even when an overload is applied to the
In the case of the present invention, the shape of the
図10は、本実施の形態の制御部の構成を示すブロック図である。
図10に示すように、本実施の形態の制御部9は、上述したDC方式のモータ7の回転を制御するための回転制御部101を有し、この回転制御部101には、上述した操作スイッチ9aから上昇又は下降の指示信号が入力される。 FIG. 10 is a block diagram showing the configuration of the control unit of the present embodiment.
As shown in FIG. 10, thecontrol unit 9 of the present embodiment has a rotation control unit 101 for controlling the rotation of the DC motor 7 described above, and the rotation control unit 101 includes the operation described above. An up or down instruction signal is input from the switch 9a.
図10に示すように、本実施の形態の制御部9は、上述したDC方式のモータ7の回転を制御するための回転制御部101を有し、この回転制御部101には、上述した操作スイッチ9aから上昇又は下降の指示信号が入力される。 FIG. 10 is a block diagram showing the configuration of the control unit of the present embodiment.
As shown in FIG. 10, the
回転制御部101においては、モータ7の加速時間及び減速時間の設定と、その後の等速度条件の設定を行い、これらの設定に基づく指示信号を出力する。
回転制御部101は、加減速波形制御部102及び等速波形制御部103に接続されている。 Therotation control unit 101 sets the acceleration time and deceleration time of the motor 7 and the subsequent constant speed conditions, and outputs an instruction signal based on these settings.
Therotation control unit 101 is connected to the acceleration / deceleration waveform control unit 102 and the constant velocity waveform control unit 103.
回転制御部101は、加減速波形制御部102及び等速波形制御部103に接続されている。 The
The
加減速波形制御部102は、回転制御部101からの加減速信号を受け、モータ7の加速波形(ソフトスタート)と減速波形(ソフトストップ)を設定し、設定した駆動波形信号を所定のタイミングでPWM生成部104に出力する。
The acceleration / deceleration waveform control unit 102 receives the acceleration / deceleration signal from the rotation control unit 101, sets the acceleration waveform (soft start) and deceleration waveform (soft stop) of the motor 7, and sets the set drive waveform signal at a predetermined timing. Output to the PWM generator 104.
等速波形制御部103は、回転制御部101からの等速信号を受け、モータ7の等速波形を決定し、決定した駆動波形信号を所定のタイミングでPWM生成部104に出力する。
The constant speed waveform control unit 103 receives the constant speed signal from the rotation control unit 101, determines the constant speed waveform of the motor 7, and outputs the determined drive waveform signal to the PWM generation unit 104 at a predetermined timing.
PWM生成部104は、加減速波形制御部102及び等速波形制御部103からの駆動波形信号に基づいて低電圧におけるPWM波形を生成し、このPWM波形信号をモータ駆動回路105に出力する。
The PWM generation unit 104 generates a PWM waveform at a low voltage based on the drive waveform signals from the acceleration / deceleration waveform control unit 102 and the constant velocity waveform control unit 103, and outputs the PWM waveform signal to the motor drive circuit 105.
モータ駆動回路105は、PWM生成部104からのPWM波形信号を変換してモータ出力用波形信号とし、この信号をモータ7に出力する。
このような構成により、モータ7は、始動時にはソフトスタートを行い、かつ、停止時にはソフトストップを行うことができる。 Themotor drive circuit 105 converts the PWM waveform signal from the PWM generation unit 104 into a motor output waveform signal, and outputs this signal to the motor 7.
With such a configuration, themotor 7 can perform a soft start when starting and a soft stop when stopping.
このような構成により、モータ7は、始動時にはソフトスタートを行い、かつ、停止時にはソフトストップを行うことができる。 The
With such a configuration, the
さらに、本実施の形態では、モータ7には、その回転位置等を検出するセンサ(図示せず)が設けられるとともに、このセンサからの信号に基づいてセンサの状態を読み取る位置検出部106が設けられている。
これにより、位置検出部106は、上述の予め設定したセンサの動作を検出した場合に、状態検出部107に対しても停止信号を出力する。 Further, in the present embodiment, themotor 7 is provided with a sensor (not shown) that detects its rotational position and the like, and a position detector 106 that reads the state of the sensor based on a signal from this sensor. It has been.
Thereby, theposition detection part 106 outputs a stop signal also to the state detection part 107, when the operation | movement of the above-mentioned preset sensor is detected.
これにより、位置検出部106は、上述の予め設定したセンサの動作を検出した場合に、状態検出部107に対しても停止信号を出力する。 Further, in the present embodiment, the
Thereby, the
状態検出部107は、モータ7の状態動作を監視するもので、位置検出部106から停止信号を受けた場合には、回転制御部101に対して動作指示を全て禁止すべき旨の信号を出力する。
これにより、回転制御部101は、加減速波形制御部102及び等速波形制御部103に対する指示信号の出力を停止する。その結果、モータ7の回転動作が停止する。 Thestate detection unit 107 monitors the state operation of the motor 7, and when receiving a stop signal from the position detection unit 106, outputs a signal to the rotation control unit 101 that all operation instructions should be prohibited. To do.
As a result, therotation control unit 101 stops outputting instruction signals to the acceleration / deceleration waveform control unit 102 and the constant velocity waveform control unit 103. As a result, the rotation operation of the motor 7 is stopped.
これにより、回転制御部101は、加減速波形制御部102及び等速波形制御部103に対する指示信号の出力を停止する。その結果、モータ7の回転動作が停止する。 The
As a result, the
以上述べた本実施の形態においては、ドラム10の巻下げの際に、回転制御部101において設定された加速信号を加減速波形制御部102において所定のソフト波形にし、PWM生成部104において低電圧のPWM波形を生成した上でモータ7を始動(ソフトスタート)する。
In the present embodiment described above, when the drum 10 is lowered, the acceleration signal set in the rotation control unit 101 is changed to a predetermined soft waveform in the acceleration / deceleration waveform control unit 102, and the low voltage is generated in the PWM generation unit 104. After the PWM waveform is generated, the motor 7 is started (soft start).
このようにモータ7の動作を制御することにより、ドラム10の巻下げの際に、ドラム本体部11に巻き付けられた上層部と下層部のロープ20の間における相対的なスリップの発生を防ぐことができ、これによりロープ20の浮き上がりや隣接するガイド部12へのジャンピングを防止することができる。
Controlling the operation of the motor 7 in this way prevents the occurrence of relative slip between the upper layer portion and the lower layer rope 20 wound around the drum main body portion 11 when the drum 10 is lowered. As a result, the rope 20 can be prevented from being lifted or jumped to the adjacent guide portion 12.
図11(a)(b)は、本実施の形態の駆動系の構成を示すもので、図11(a)は内部正面図、図11(b)は内部側面図である。
図11(a)(b)に示すように、本実施の形態においては、装置本体部4内に設けられたドラム10のモータ側の第2のフランジ10bに、駆動用歯車21がドラム10の回転軸線Oと同心状に取り付けられ、ドラム10と共に回転するように構成されている。 FIGS. 11A and 11B show the configuration of the drive system of the present embodiment. FIG. 11A is an internal front view and FIG. 11B is an internal side view.
As shown in FIGS. 11A and 11B, in the present embodiment, thedriving gear 21 is connected to the second flange 10 b on the motor side of the drum 10 provided in the apparatus main body 4. It is attached concentrically with the rotation axis O and is configured to rotate with the drum 10.
図11(a)(b)に示すように、本実施の形態においては、装置本体部4内に設けられたドラム10のモータ側の第2のフランジ10bに、駆動用歯車21がドラム10の回転軸線Oと同心状に取り付けられ、ドラム10と共に回転するように構成されている。 FIGS. 11A and 11B show the configuration of the drive system of the present embodiment. FIG. 11A is an internal front view and FIG. 11B is an internal side view.
As shown in FIGS. 11A and 11B, in the present embodiment, the
この駆動用歯車21の下方には、装置本体部4に設けられた支軸22を中心として回転する第1の伝達歯車23が設けられ、この第1の伝達歯車23は駆動用歯車21と噛み合うように設けられている。
A first transmission gear 23 that rotates about a support shaft 22 provided in the apparatus main body 4 is provided below the drive gear 21, and the first transmission gear 23 meshes with the drive gear 21. It is provided as follows.
なお、第1の伝達歯車23の歯数比は、駆動用歯車21と同等となるように設定されている。
さらに、この第1の伝達歯車23には、第1の伝達歯車23より歯数の小さいピニオンギア24が第1の伝達歯車23に一体的に同心状に固定されている。 The gear ratio of thefirst transmission gear 23 is set to be equivalent to that of the driving gear 21.
Further, apinion gear 24 having a smaller number of teeth than the first transmission gear 23 is integrally and concentrically fixed to the first transmission gear 23.
さらに、この第1の伝達歯車23には、第1の伝達歯車23より歯数の小さいピニオンギア24が第1の伝達歯車23に一体的に同心状に固定されている。 The gear ratio of the
Further, a
装置本体部4内のドラム10の下方には、ロープ往復送りねじ30が設けられている。
A rope reciprocating feed screw 30 is provided below the drum 10 in the apparatus body 4.
このロープ往復送りねじ30は、エンジニアリング樹脂(例えばポリアセタールや高密度ポリエチレン、ナイロン樹脂、カーボンファイバー等)によって構成されている。
ロープ往復送りねじ30は、直線状に形成されてドラム10の回転軸線Oと平行に配置され、その回転軸31が本体フレーム4aの両側に設けた軸受け32に回転自在に支持されている。 The ropereciprocating feed screw 30 is made of an engineering resin (for example, polyacetal, high density polyethylene, nylon resin, carbon fiber, or the like).
The ropereciprocating feed screw 30 is formed in a straight line and is arranged in parallel with the rotation axis O of the drum 10, and the rotation shaft 31 is rotatably supported by bearings 32 provided on both sides of the main body frame 4 a.
ロープ往復送りねじ30は、直線状に形成されてドラム10の回転軸線Oと平行に配置され、その回転軸31が本体フレーム4aの両側に設けた軸受け32に回転自在に支持されている。 The rope
The rope
ロープ往復送りねじ30は、その中腹部分にねじ溝部33を有し、後述するシフターブロック50がこのねじ溝部33と噛み合うことによってロープ往復送りねじ30の延びる方向に沿って所定の速度で往復移動するようになっている。
ロープ往復送りねじ30の回転軸31には、第2の伝達歯車25が固定され、この第2の伝達歯車25が、上述したピニオンギア24と噛み合うように配置されている。 The ropereciprocating feed screw 30 has a thread groove portion 33 in the middle part thereof, and a shifter block 50 described later meshes with the screw groove portion 33 so that the rope reciprocating feed screw 30 reciprocates at a predetermined speed along the direction in which the rope reciprocating feed screw 30 extends. It is like that.
Asecond transmission gear 25 is fixed to the rotary shaft 31 of the rope reciprocating feed screw 30, and the second transmission gear 25 is disposed so as to mesh with the pinion gear 24 described above.
ロープ往復送りねじ30の回転軸31には、第2の伝達歯車25が固定され、この第2の伝達歯車25が、上述したピニオンギア24と噛み合うように配置されている。 The rope
A
ここで、第2の伝達歯車25の歯数は、ピニオンギア24の歯数より大きくなるように設定されている。
ロープ往復送りねじ30の斜め下方には、後述するシフターブロック50を案内するための棒状のガイド軸40が設けられている。 Here, the number of teeth of thesecond transmission gear 25 is set to be larger than the number of teeth of the pinion gear 24.
A rod-shapedguide shaft 40 for guiding a shifter block 50 described later is provided obliquely below the rope reciprocating feed screw 30.
ロープ往復送りねじ30の斜め下方には、後述するシフターブロック50を案内するための棒状のガイド軸40が設けられている。 Here, the number of teeth of the
A rod-shaped
このガイド軸40は、直線状に形成されてロープ往復送りねじ30と平行に配置され、その両端部が本体フレーム4aの両側に設けた軸受け43に回転自在に支持されている。
ガイド軸40には、従動歯車26が固定され、この従動歯車26が、上述した第2の伝達歯車25と噛み合うように配置されている。
ここで、従動歯車26の歯数は、第2の伝達歯車25の歯数より小さくなるように設定されている。 Theguide shaft 40 is formed in a straight line and is arranged in parallel with the rope reciprocating feed screw 30, and both ends thereof are rotatably supported by bearings 43 provided on both sides of the main body frame 4a.
The drivengear 26 is fixed to the guide shaft 40, and the driven gear 26 is disposed so as to mesh with the second transmission gear 25 described above.
Here, the number of teeth of the drivengear 26 is set to be smaller than the number of teeth of the second transmission gear 25.
ガイド軸40には、従動歯車26が固定され、この従動歯車26が、上述した第2の伝達歯車25と噛み合うように配置されている。
ここで、従動歯車26の歯数は、第2の伝達歯車25の歯数より小さくなるように設定されている。 The
The driven
Here, the number of teeth of the driven
図12(a)~(c)は、本発明に用いるロープ送り機構の実施の形態を示すもので、図12(a)は、全体構成を示す部分断面図、図12(b)は、シフターブロックの構成を示す側面図、図12(c)は、ロープ送り機構の要部構成を示す側面図である。
12 (a) to 12 (c) show an embodiment of the rope feeding mechanism used in the present invention. FIG. 12 (a) is a partial sectional view showing the entire configuration, and FIG. 12 (b) is a shifter. FIG. 12C is a side view showing the configuration of the main part of the rope feed mechanism.
図12(a)~(c)に示すように、このロープ送り機構は、上述したロープ往復送りねじ30とガイド軸40とにまたがって装着されるシフターブロック50を有している。
このシフターブロック50は、例えば直方体形状に形成された本体部51を有している。 As shown in FIGS. 12A to 12C, this rope feed mechanism has ashifter block 50 that is mounted across the rope reciprocating feed screw 30 and the guide shaft 40 described above.
Theshifter block 50 has a main body 51 formed in a rectangular parallelepiped shape, for example.
このシフターブロック50は、例えば直方体形状に形成された本体部51を有している。 As shown in FIGS. 12A to 12C, this rope feed mechanism has a
The
シフターブロック50は、本体部51の一方の端部において上述したロープ往復送りねじ30が貫通するとともに、本体部51の他方の端部において上述したガイド軸40が貫通して装着されるように構成されている。
The shifter block 50 is configured such that the above-described rope reciprocating feed screw 30 penetrates at one end of the main body 51 and the above-described guide shaft 40 penetrates at the other end of the main body 51. Has been.
シフターブロック50の本体部51内には、ロープ往復送りねじ30のねじ溝部33と噛み合う突起部を有するコマ52が設けられ、このコマ52とロープ往復送りねじ30のねじ溝部33とが噛み合うことにより、ロープ往復送りねじ30の回転に伴いシフターブロック50がロープ往復送りねじ30の回転軸線方向に往復移動するように構成されている。
In the main body 51 of the shifter block 50, a top 52 having a projection that meshes with the thread groove 33 of the rope reciprocating feed screw 30 is provided, and the top 52 and the thread groove 33 of the rope reciprocating feed screw 30 are engaged with each other. The shifter block 50 is configured to reciprocate in the rotational axis direction of the rope reciprocating feed screw 30 as the rope reciprocating feed screw 30 rotates.
本実施の形態のホイスト1は、上述したようにドラム本体部11に設けた凸形状のガイド部12によってロープ20を支持して平行多層巻を行うものであるから、従来の平行溝付きドラムを用いる場合と同様に、フリートアングルを、ドラム10の回転軸線Oに対して90度±1.5度以下になるように設定し、特に第1及び第2のフランジ10a、10bの近傍では、上段へのロープ20の乗り移りがスムーズになるように、フリートアングルを90度±約1.0~1.5度となるように設定する必要がある。
Since the hoist 1 of the present embodiment performs parallel multi-layer winding by supporting the rope 20 by the convex guide portion 12 provided in the drum main body portion 11 as described above, a conventional parallel grooved drum is used. As in the case of use, the fleet angle is set to be 90 ° ± 1.5 ° or less with respect to the rotation axis O of the drum 10, and particularly in the vicinity of the first and second flanges 10 a and 10 b. It is necessary to set the fleet angle to be 90 degrees ± about 1.0 to 1.5 degrees so that the transfer of the rope 20 to the road becomes smooth.
そこで、本実施の形態においては、ドラム10が1回転した場合に、上述したガイド部12のピッチPより若干小さなピッチでシフターブロック50が移動するように、ロープ往復送りねじ30の中央部分のねじ溝部33の角度及び速度比が設定されている。
Therefore, in the present embodiment, when the drum 10 makes one rotation, the screw at the central portion of the rope reciprocating feed screw 30 is moved so that the shifter block 50 moves at a slightly smaller pitch than the pitch P of the guide portion 12 described above. The angle and speed ratio of the groove 33 are set.
そして、ドラム本体部11の端部にロープ20が到達したときに、90度±約1.0~1.5度のフリートアングルが内側に確保できるように、ロープ往復送りねじ30の両端部のねじ溝部33の角度及び速度比が設定されている。
Then, when the rope 20 reaches the end of the drum body 11, 90 ° ± about 1.0 to 1.5 ° of the fleet angle of 90 ° ± about 1.5 to 1.5 ° can be secured on the inner side. The angle and speed ratio of the thread groove portion 33 are set.
シフターブロック50の本体部51の他方の端部にはガイドシーブ53が設けられている。
このガイドシーブ53は、ドラム10から送り出されたロープ20をホイスト1の中心位置に来るように寄せているもので、シフターブロック50の内側の位置に取り付けられている。 Aguide sheave 53 is provided at the other end of the main body 51 of the shifter block 50.
Theguide sheave 53 moves the rope 20 fed from the drum 10 so as to come to the center position of the hoist 1, and is attached to a position inside the shifter block 50.
このガイドシーブ53は、ドラム10から送り出されたロープ20をホイスト1の中心位置に来るように寄せているもので、シフターブロック50の内側の位置に取り付けられている。 A
The
この場合、ガイドシーブ53には、玉軸受54が取り付けられるとともに、この玉軸受54の内側に、すべり軸受55が取り付けられている(図12(a)参照)。
このすべり軸受55は、ガイドシーブ53の幅方向に貫通するように取り付けられ、その両端部が例えば止めビス(図示せず)によって回転できない状態でシフターブロック50に固定され、このすべり軸受55内にガイド軸40が挿入されてガイド軸40と同心状に配置されている。 In this case, aball bearing 54 is attached to the guide sheave 53, and a slide bearing 55 is attached inside the ball bearing 54 (see FIG. 12A).
Theslide bearing 55 is attached so as to penetrate in the width direction of the guide sheave 53, and both ends thereof are fixed to the shifter block 50 in a state in which the slide sheave cannot be rotated by, for example, a stop screw (not shown). A guide shaft 40 is inserted and arranged concentrically with the guide shaft 40.
このすべり軸受55は、ガイドシーブ53の幅方向に貫通するように取り付けられ、その両端部が例えば止めビス(図示せず)によって回転できない状態でシフターブロック50に固定され、このすべり軸受55内にガイド軸40が挿入されてガイド軸40と同心状に配置されている。 In this case, a
The
そして、シフターブロック50の本体部51の中腹部分に設けられた貫通孔51aにロープ20が挿入され、ガイドシーブ53のシーブ溝53aに係合してロープ20が案内されるように構成されている(図12(a)(b)参照)。
The rope 20 is inserted into a through hole 51 a provided in the middle part of the main body 51 of the shifter block 50, and is engaged with the sheave groove 53 a of the guide sheave 53 to guide the rope 20. (See FIGS. 12A and 12B).
このような構成を有する本実施の形態においては、モータ7を駆動してドラム10を回転させると、ドラム10の回転軸線Oと同心状に取り付けられた駆動用歯車21の回転動力が第1の伝達歯車23、ピニオンギア24、第2の伝達歯車25を介して伝達され、これによりロープ往復送りねじ30が所定の速度で回転し、シフターブロック50がロープ往復送りねじ30の延びる方向に沿って移動する。
In the present embodiment having such a configuration, when the motor 10 is driven to rotate the drum 10, the rotational power of the drive gear 21 attached concentrically with the rotation axis O of the drum 10 is the first. It is transmitted via the transmission gear 23, the pinion gear 24, and the second transmission gear 25, whereby the rope reciprocating feed screw 30 rotates at a predetermined speed, and the shifter block 50 extends along the direction in which the rope reciprocating feed screw 30 extends. Moving.
また、第2の伝達歯車25の回転動力が、ガイド軸40に固定された従動歯車26に伝達されてガイド軸40が回転する。
ここで、本実施の形態のロープ送り機構においては、ロープ往復送りねじ30の回転軸31に固定された第2の伝達歯車25の歯数が、ガイド軸40に固定された従動歯車26の歯数より大きくなるように設定され、これによりガイド軸40の回転速度がロープ往復送りねじ30の回転速度より大きくなるように構成されている。 Further, the rotational power of thesecond transmission gear 25 is transmitted to the driven gear 26 fixed to the guide shaft 40, so that the guide shaft 40 rotates.
Here, in the rope feed mechanism of the present embodiment, the number of teeth of thesecond transmission gear 25 fixed to the rotary shaft 31 of the rope reciprocating feed screw 30 is the number of teeth of the driven gear 26 fixed to the guide shaft 40. The rotational speed of the guide shaft 40 is set to be larger than the rotational speed of the rope reciprocating feed screw 30.
ここで、本実施の形態のロープ送り機構においては、ロープ往復送りねじ30の回転軸31に固定された第2の伝達歯車25の歯数が、ガイド軸40に固定された従動歯車26の歯数より大きくなるように設定され、これによりガイド軸40の回転速度がロープ往復送りねじ30の回転速度より大きくなるように構成されている。 Further, the rotational power of the
Here, in the rope feed mechanism of the present embodiment, the number of teeth of the
図13(a)~(d)及び図14(a)~(c)は、本実施の形態におけるロープをドラム本体部に巻き付ける動作を示す説明図である。ここでは、第1の直線部14の断面構成を模式的に示す。
FIGS. 13 (a) to 13 (d) and FIGS. 14 (a) to 14 (c) are explanatory views showing the operation of winding the rope in the present embodiment around the drum body. Here, the cross-sectional configuration of the first straight portion 14 is schematically shown.
本実施の形態において、ドラム本体部11のロープ取出口11a(図4参照)にロープ20の先端部を固定し、ドラム10を回転させるとともにシフターブロック50を動作させてロープ20を平行巻でドラム本体部11に巻き付けていくと、まず、第1層目のロープ20Aが、第1のフランジ10a側の第1のガイド部12aと、第1のガイド部12aに隣接するガイド部12Cと、第1のフランジ10aとに支持された状態(図13(a)参照)となる。
In the present embodiment, the tip of the rope 20 is fixed to the rope outlet 11a (see FIG. 4) of the drum main body 11, and the drum 10 is rotated and the shifter block 50 is operated to wind the rope 20 in parallel winding. As the body portion 11 is wound, first, the first layer of rope 20A includes a first guide portion 12a on the first flange 10a side, a guide portion 12C adjacent to the first guide portion 12a, 1 (see FIG. 13A).
そして、ドラム10の回転及びシフターブロック50の動作を継続すると、第2のフランジ10b側の第2のガイド部12bに向って、隣接する一対のガイド部12に第1層目のロープ20Aが順次支持されていき、最終段の第1層目のロープ20Aは、第2のガイド部12bの下側ガイド部12b1と、第2のガイド部12bに隣接するガイド部12Dとによって支持される(図13(b)参照)。
Then, when the rotation of the drum 10 and the operation of the shifter block 50 are continued, the first layer of rope 20A is sequentially applied to the pair of adjacent guide portions 12 toward the second guide portion 12b on the second flange 10b side. will be supported, the first layer of the rope 20A in the final stage, the lower guide portion 12b 1 of the second guide portion 12b, is supported by a guide section 12D adjacent to the second guide portion 12b ( (Refer FIG.13 (b)).
その後、ドラム本体部11の第2のガイド部12b側の端部において、第2層目のロープ20Bが、第2のガイド部12b側の端部の第1層目のロープ20Aと第2のガイド部12bの上に乗り上げ、第1層目のロープ20Aと第2のガイド部12bの上側ガイド部12b2と第2のフランジ10bとによって支持される(図13(c)参照)。
After that, at the end of the drum main body 11 on the second guide portion 12b side, the second layer rope 20B is connected to the first layer rope 20A at the end on the second guide portion 12b side and the second layer. It rides on the guide portion 12b and is supported by the first layer rope 20A, the upper guide portion 12b2 of the second guide portion 12b, and the second flange 10b (see FIG. 13C).
さらに、ドラム10の回転及びシフターブロック50の動作を継続すると、第2層目のロープ20Bが、第1のフランジ10aに向って、隣接する第1層目のロープ20Aに順次支持されていく(図13(d)参照)。
Further, when the rotation of the drum 10 and the operation of the shifter block 50 are continued, the second-layer rope 20B is sequentially supported by the adjacent first-layer rope 20A toward the first flange 10a ( (Refer FIG.13 (d)).
この場合、上述した第1及び第2の交差部16、17においては、第2層目のロープ20Bが、第1層目のロープ20Aの傾斜方向と反対方向に傾斜して、第1層目のロープ20A上に乗り上げて巻き付けられていく。
In this case, in the first and second intersections 16 and 17 described above, the second layer rope 20B is inclined in the direction opposite to the inclination direction of the first layer rope 20A, and the first layer It rides on the rope 20A and is wound.
そして、ドラム本体部11の第1のフランジ10a側端部において、第3層目のロープ20Cが、第1のフランジ10aによって支持された状態で、第1のフランジ10a側端部の第2層目のロープ20B上に乗り上げ、この第2層目のロープ20Bと第1のフランジ10aによって支持される(図14(a)参照)。
Then, at the end of the drum body 11 on the first flange 10a side, the third layer rope 20C is supported by the first flange 10a, and the second layer at the end of the first flange 10a side. It rides on the rope 20B of the eye and is supported by the rope 20B of the second layer and the first flange 10a (see FIG. 14A).
さらに、ドラム10の回転及びシフターブロック50の動作を継続すると、第3層目のロープ20Cが、第2のフランジ10bに向って、隣接する第2層目のロープ20Bに順次支持されていく(図14(b)参照)。
この場合、上述した第1及び第2の交差部16、17においては、第3層目のロープ20Cが、第2層目のロープ20Bの傾斜方向と反対方向に傾斜して、第2層目のロープ20B上に乗り上げて巻き付けられていく。 Further, when the rotation of thedrum 10 and the operation of the shifter block 50 are continued, the third layer rope 20C is sequentially supported by the adjacent second layer rope 20B toward the second flange 10b ( (Refer FIG.14 (b)).
In this case, in the first and second intersections 16 and 17 described above, the rope 20C of the third layer is inclined in the direction opposite to the inclination direction of the rope 20B of the second layer, and the second layer It rides on the rope 20B and is wound.
この場合、上述した第1及び第2の交差部16、17においては、第3層目のロープ20Cが、第2層目のロープ20Bの傾斜方向と反対方向に傾斜して、第2層目のロープ20B上に乗り上げて巻き付けられていく。 Further, when the rotation of the
In this case, in the first and
そして、ドラム本体部11の第2のフランジ10b側端部において、第4層目のロープ20Dが、第2のフランジ10bによって支持された状態で、第2のフランジ10b側端部の第3層目のロープ20C上に乗り上げ、この第3層目のロープ20Cと第2のフランジ10bによって支持される(図14(c)参照)。
Then, at the end on the second flange 10b side of the drum body 11, the fourth layer rope 20D is supported by the second flange 10b, and the third layer on the second flange 10b side end. It rides on the rope 20C of the eye and is supported by the rope 20C of the third layer and the second flange 10b (see FIG. 14C).
以下、同様の手順により、ロープ20のドラム本体部11への多層巻き付けを行う。
なお、上述したように、第1及び第2の交差部16、17においては、巻き付け中のロープ20が1層下のロープ20の傾斜方向と反対方向に傾斜させて乗り上げさせることによって巻き付けられる。 Hereinafter, multilayer winding of therope 20 around the drum body 11 is performed by the same procedure.
In addition, as mentioned above, in the 1st and 2nd cross | intersection parts 16 and 17, it winds by making the rope 20 in winding incline in the direction opposite to the inclination direction of the rope 20 one layer below, and run.
なお、上述したように、第1及び第2の交差部16、17においては、巻き付け中のロープ20が1層下のロープ20の傾斜方向と反対方向に傾斜させて乗り上げさせることによって巻き付けられる。 Hereinafter, multilayer winding of the
In addition, as mentioned above, in the 1st and 2nd cross |
また、図13(a)~(d)及び図14(a)~(c)に示すように、本実施の形態においては、ドラム本体部11の第1のガイド部12a側の端部において、奇数層目(ここでは、第1、3層目)のロープ20A、20Cが第1のフランジ10aに接触して支持され、ドラム本体部11の第2のガイド部12b側の端部において、偶数層目(ここでは、第2、4層目)のロープ20B、20Dが第2のフランジ10bに接触して支持される。
Further, as shown in FIGS. 13 (a) to 13 (d) and FIGS. 14 (a) to (c), in the present embodiment, at the end of the drum main body 11 on the first guide portion 12a side, The odd-numbered layer (here, the first and third layers) ropes 20A and 20C are supported in contact with the first flange 10a, and the drum body portion 11 has an even-numbered end on the second guide portion 12b side. Layers (here, second and fourth layers) of ropes 20B and 20D are supported in contact with the second flange 10b.
以上述べた本実施の形態では、ガイド軸40の回転速度がロープ往復送りねじ30の回転速度の2~3倍となるように従動歯車26と第2の伝達歯車25の歯数比を設定することにより、ガイド軸40の回転に伴って塵埃を跳ね飛ばし、ガイド軸40への塵埃の付着を防止するとともに、動作開始時における静的な摩擦係数を動的な摩擦係数に変化させて、摩擦係数の低減を図っている。
In the present embodiment described above, the gear ratio of the driven gear 26 and the second transmission gear 25 is set so that the rotational speed of the guide shaft 40 is 2 to 3 times the rotational speed of the rope reciprocating feed screw 30. As a result, the dust splashes off with the rotation of the guide shaft 40 to prevent the dust from adhering to the guide shaft 40, and the static friction coefficient at the start of the operation is changed to the dynamic friction coefficient to reduce the friction. The coefficient is reduced.
すなわち、従来技術では、塵埃の存在やガイド軸40の潤滑不足によりスライドがスムーズにいかないことがあり、セルフロックを起こして動かなくなってしまうことがあったが、本実施の形態によれば、このような不都合が生ずることはなく、しかも、摩擦係数の低減に伴いガイド軸40のすべり軸受55の長さを短くすることができるので、よりコンパクトなロープ送り機構を提供することが可能となった。
That is, in the prior art, the slide may not go smoothly due to the presence of dust and the lack of lubrication of the guide shaft 40, which may cause a self-lock and stop moving, but according to this embodiment, Such inconvenience does not occur, and the length of the slide bearing 55 of the guide shaft 40 can be shortened as the friction coefficient is reduced, so that a more compact rope feeding mechanism can be provided. It was.
また、従来のホイストやウインチに使用するロープ往復送りねじはステンレスを含む鉄鋼材からなるものであったが、本実施の形態では、ロープ往復送りねじ30を上述したエンジニアリング樹脂で構成することにより、その自己潤滑性のためにオイルやグリースを必要とせず、塵埃が付着しにくくすることができる。
Moreover, although the rope reciprocating feed screw used for the conventional hoist and winch was made of a steel material including stainless steel, in this embodiment, by configuring the rope reciprocating feed screw 30 with the above-described engineering resin, Because of its self-lubricating property, oil and grease are not required, and dust can be made difficult to adhere.
加えて、従来の装置においては、無負荷状態に近いロープを巻き出すとき、ロープの加速度や速度が大きいと、ガイドシーブの回転抵抗により、ロープがスムーズに巻き出されないことがある。
すなわち、通常軸方向にスライドするガイドシーブは滑り軸受を使用するが、スムーズな低摩擦回転が得られない。 In addition, in a conventional apparatus, when a rope close to an unloaded state is unwound, if the acceleration or speed of the rope is large, the rope may not be unwound smoothly due to the rotational resistance of the guide sheave.
That is, the guide sheave that normally slides in the axial direction uses a sliding bearing, but smooth low-friction rotation cannot be obtained.
すなわち、通常軸方向にスライドするガイドシーブは滑り軸受を使用するが、スムーズな低摩擦回転が得られない。 In addition, in a conventional apparatus, when a rope close to an unloaded state is unwound, if the acceleration or speed of the rope is large, the rope may not be unwound smoothly due to the rotational resistance of the guide sheave.
That is, the guide sheave that normally slides in the axial direction uses a sliding bearing, but smooth low-friction rotation cannot be obtained.
これに対し、本実施の形態では、玉軸受54にすべり軸受55を組み合わせることにより、ガイドシーブ53の低摩擦回転を実現し、これによりロープ20をスムーズに巻き出すことができる。
On the other hand, in the present embodiment, by combining the ball bearing 54 with the slide bearing 55, low friction rotation of the guide sheave 53 is realized, whereby the rope 20 can be smoothly unwound.
図15は、本発明に用いるロープ逆巻検知機構及び無負荷検知機構の実施の形態の概略構成図である。
本発明においては、後述するように、ロープ逆巻検知機構と無負荷検知機構を有している。 FIG. 15 is a schematic configuration diagram of an embodiment of a rope reverse winding detection mechanism and a no-load detection mechanism used in the present invention.
In this invention, it has a rope reverse winding detection mechanism and a no-load detection mechanism so that it may mention later.
本発明においては、後述するように、ロープ逆巻検知機構と無負荷検知機構を有している。 FIG. 15 is a schematic configuration diagram of an embodiment of a rope reverse winding detection mechanism and a no-load detection mechanism used in the present invention.
In this invention, it has a rope reverse winding detection mechanism and a no-load detection mechanism so that it may mention later.
ここでは、本体フレーム4a内のドラム10の下方に、上述したシフターブロック50と、シフターブロック50に組み付けられるリミットレバーユニット60と、リミットドグ71、リミットカム73及びリミットスイッチ75とによって構成されるロープ逆巻検知機構が設けられている。
Here, below the drum 10 in the main body frame 4a, the reverse of the rope constituted by the above-described shifter block 50, the limit lever unit 60 assembled to the shifter block 50, the limit dog 71, the limit cam 73, and the limit switch 75. A winding detection mechanism is provided.
また、本体フレーム4a内のドラム10の下方に、上述したシフターブロック50と、シフターブロック50に組み付けられる無負荷検知レバーユニット80と、リミットドグ71、リミットカム73及びリミットスイッチ75とによって構成される無負荷検知機構が設けられている。
Further, below the drum 10 in the main body frame 4a, the shifter block 50, a no-load detection lever unit 80 assembled to the shifter block 50, a limit dog 71, a limit cam 73, and a limit switch 75 are included. A load detection mechanism is provided.
さらに、本体フレーム4a内のロープ逆巻検知機構及び無負荷検知機構の下方には、ロープ規制ローラ41、42が設けられている。
以下、ロープ逆巻検知機構と無負荷検知機構の実施の形態をそれぞれ詳細に説明する。 Furthermore, rope regulating rollers 41 and 42 are provided below the rope reverse winding detection mechanism and the no-load detection mechanism in the main body frame 4a.
Hereinafter, embodiments of the rope reverse winding detection mechanism and the no-load detection mechanism will be described in detail.
以下、ロープ逆巻検知機構と無負荷検知機構の実施の形態をそれぞれ詳細に説明する。 Furthermore,
Hereinafter, embodiments of the rope reverse winding detection mechanism and the no-load detection mechanism will be described in detail.
図16(a)(b)は、本実施の形態のロープ逆巻検知機構のリミットレバーユニットを示すもので、図16(a)は側面図、図16(b)は正面図である。
また、図17(a)~(c)は、同ロープ逆巻検知機構の構成を示すもので、図17(a)は全体構成を示す正面図、図17(b)は同ロープ逆巻検知機構の要部構成を示す側面図、図17(c)は同ロープ逆巻検知機構の全体構成を示す側面図である。 16 (a) and 16 (b) show a limit lever unit of the rope reverse winding detection mechanism of the present embodiment. FIG. 16 (a) is a side view and FIG. 16 (b) is a front view.
FIGS. 17 (a) to 17 (c) show the configuration of the rope reverse winding detection mechanism, FIG. 17 (a) is a front view showing the entire configuration, and FIG. 17 (b) is the rope reverse winding detection. The side view which shows the principal part structure of a mechanism, FIG.17 (c) is a side view which shows the whole structure of the rope reverse winding detection mechanism.
また、図17(a)~(c)は、同ロープ逆巻検知機構の構成を示すもので、図17(a)は全体構成を示す正面図、図17(b)は同ロープ逆巻検知機構の要部構成を示す側面図、図17(c)は同ロープ逆巻検知機構の全体構成を示す側面図である。 16 (a) and 16 (b) show a limit lever unit of the rope reverse winding detection mechanism of the present embodiment. FIG. 16 (a) is a side view and FIG. 16 (b) is a front view.
FIGS. 17 (a) to 17 (c) show the configuration of the rope reverse winding detection mechanism, FIG. 17 (a) is a front view showing the entire configuration, and FIG. 17 (b) is the rope reverse winding detection. The side view which shows the principal part structure of a mechanism, FIG.17 (c) is a side view which shows the whole structure of the rope reverse winding detection mechanism.
本実施の形態のロープ逆巻検知機構は、上述したシフターブロック50に取り付けられるリミットレバーユニット60を備えている。
図16(a)(b)に示すように、リミットレバーユニット60は、一対の同形状のリミットレバー61と、これら一対のリミットレバー61に取り付けられる検出ローラ62及び駆動ローラ63とを有している。 The rope reverse winding detection mechanism according to the present embodiment includes alimit lever unit 60 attached to the shifter block 50 described above.
As shown in FIGS. 16A and 16B, thelimit lever unit 60 includes a pair of limit levers 61 having the same shape, and a detection roller 62 and a drive roller 63 attached to the pair of limit levers 61. Yes.
図16(a)(b)に示すように、リミットレバーユニット60は、一対の同形状のリミットレバー61と、これら一対のリミットレバー61に取り付けられる検出ローラ62及び駆動ローラ63とを有している。 The rope reverse winding detection mechanism according to the present embodiment includes a
As shown in FIGS. 16A and 16B, the
リミットレバー61は、例えば細長板状の部材をほぼ中腹部分において異なる方向へ2回直角に折り曲げて形成され、これら二つのリミットレバー61を対向させることにより、レバー間の間隔の小さい駆動部61aと、この駆動部61aよりレバー間の間隔の大きい装着部61bとが設けられている。
The limit lever 61 is formed, for example, by bending an elongated plate-like member at right angles twice in different directions almost at the middle part, and by making these two limit levers 61 face each other, the drive unit 61a having a small interval between the levers A mounting portion 61b having a larger interval between the levers than the driving portion 61a is provided.
ここで、一対のリミットレバー61の装着部61bの間隔は、シフターブロック50の幅より若干大きくなるように設定されている。
各リミットレバー61の駆動部61aは直線状に形成され、その先端部に駆動ローラ63が各駆動部61aに挟まれた状態で取り付けられている。ここで、駆動ローラ63は、駆動部61aの延びる方向の直線に直交する支軸64を中心として回転するように構成されている。 Here, the interval between the mountingportions 61 b of the pair of limit levers 61 is set to be slightly larger than the width of the shifter block 50.
Thedrive part 61a of each limit lever 61 is formed in a straight line shape, and a drive roller 63 is attached to the tip of the limit lever 61 with the drive part 61a sandwiched between the drive parts. Here, the drive roller 63 is configured to rotate about a support shaft 64 orthogonal to a straight line in the extending direction of the drive unit 61a.
各リミットレバー61の駆動部61aは直線状に形成され、その先端部に駆動ローラ63が各駆動部61aに挟まれた状態で取り付けられている。ここで、駆動ローラ63は、駆動部61aの延びる方向の直線に直交する支軸64を中心として回転するように構成されている。 Here, the interval between the mounting
The
一方、各リミットレバー61の装着部61bは、その中腹部分が同一平面上で例えばブーメラン状に一方向に湾曲するように形成され、当該湾曲内側の縁部61cの曲率半径が、ロープ往復送りねじ30の半径より若干大きくなるように設定されている。
そして、各リミットレバー61の装着部61bの先端部に、検出ローラ62が一対の装着部61bに挟まれた状態で取り付けられている。 On the other hand, the mountingportion 61b of each limit lever 61 is formed such that its middle portion is curved in one direction, for example, in a boomerang shape on the same plane, and the radius of curvature of the edge portion 61c inside the curve is the rope reciprocating feed screw. It is set to be slightly larger than the radius of 30.
And thedetection roller 62 is attached to the front-end | tip part of the mounting part 61b of each limit lever 61 in the state pinched | interposed into a pair of mounting part 61b.
そして、各リミットレバー61の装着部61bの先端部に、検出ローラ62が一対の装着部61bに挟まれた状態で取り付けられている。 On the other hand, the mounting
And the
ここで、検出ローラ62は、上述した駆動ローラ63の支軸64と平行な支軸65を中心として回転するように構成されている。
また、検出ローラ62は、その両端部に設けられた端部ローラ62aと、これら端部ローラ62aの内側に設けられた内側押圧ローラ62bとから構成される。 Here, thedetection roller 62 is configured to rotate around a support shaft 65 parallel to the support shaft 64 of the drive roller 63 described above.
Moreover, thedetection roller 62 is comprised from the edge part roller 62a provided in the both ends, and the inner side press roller 62b provided inside these edge part rollers 62a.
また、検出ローラ62は、その両端部に設けられた端部ローラ62aと、これら端部ローラ62aの内側に設けられた内側押圧ローラ62bとから構成される。 Here, the
Moreover, the
ここでは、端部ローラ62aの外径が、内側押圧ローラ62bの外径より若干大きくなるように設定されている。
この場合、端部ローラ62aは、例えばステンレスからなるものである。
また、内側押圧ローラ62bは、例えばステンレス又は樹脂からなり、端部ローラ62aとは独立して回転するように構成されている。 Here, the outer diameter of theend roller 62a is set to be slightly larger than the outer diameter of the inner pressing roller 62b.
In this case, theend roller 62a is made of stainless steel, for example.
The innerpressing roller 62b is made of, for example, stainless steel or resin, and is configured to rotate independently of the end roller 62a.
この場合、端部ローラ62aは、例えばステンレスからなるものである。
また、内側押圧ローラ62bは、例えばステンレス又は樹脂からなり、端部ローラ62aとは独立して回転するように構成されている。 Here, the outer diameter of the
In this case, the
The inner
このような構成を有するリミットレバーユニット60は、一対のリミットレバー61の装着部61bによってシフターブロック50を挟んだ状態で、例えばシフターブロック50の両側部に設けた支軸56を中心として回転自在に取り付けられる。
The limit lever unit 60 having such a configuration is rotatable around, for example, support shafts 56 provided on both sides of the shifter block 50 in a state where the shifter block 50 is sandwiched between the mounting portions 61b of the pair of limit levers 61. It is attached.
この支軸56は、シフターブロック50のロープ往復送りねじ30用の貫通孔51aの近傍で(図12(a)(b)参照)、かつ、各リミットレバー61の装着部61bの湾曲内側の縁部61cの近傍に設けられている(図16(a)参照)。
The support shaft 56 is located in the vicinity of the through hole 51a for the rope reciprocating feed screw 30 of the shifter block 50 (see FIGS. 12A and 12B), and on the inner edge of the curved portion of the mounting portion 61b of each limit lever 61 It is provided in the vicinity of the portion 61c (see FIG. 16A).
リミットレバーユニット60は、シフターブロック50のロープ往復送りねじ30側端部に固定された取付金具57aに一方の端部が取り付けられた引張コイルばね58によって、駆動部61aがシフターブロック50のロープ往復送りねじ30側端部に引っ張られるように構成されている(図17(b)参照)。
The limit lever unit 60 is configured such that the drive portion 61a is reciprocated by the rope of the shifter block 50 by a tension coil spring 58 having one end attached to a mounting bracket 57a fixed to the end of the shifter block 50 on the rope reciprocating feed screw 30 side. It is comprised so that it may be pulled by the feed screw 30 side edge part (refer FIG.17 (b)).
その一方、シフターブロック50の本体部51の上部即ちリミットレバーユニット60の検出ローラ62側の部分には、例えば突起状の係止部59が設けられている。
この場合、係止部59は、検出ローラ62の端部ローラ62aと対向する位置に設けられ(図16(b)参照)、リミットレバーユニット60に対して外力が作用しない状態において引張コイルばね58の弾性力によって検出ローラ62の端部ローラ62aが係止部59にそれぞれ突き当たって係止されるように構成されている。 On the other hand, for example, a projecting lockingportion 59 is provided on the upper portion of the main body 51 of the shifter block 50, that is, on the detection roller 62 side of the limit lever unit 60.
In this case, the lockingportion 59 is provided at a position facing the end roller 62a of the detection roller 62 (see FIG. 16B), and the tension coil spring 58 is in a state where no external force acts on the limit lever unit 60. The end roller 62a of the detection roller 62 abuts against the locking portion 59 and is locked by the elastic force.
この場合、係止部59は、検出ローラ62の端部ローラ62aと対向する位置に設けられ(図16(b)参照)、リミットレバーユニット60に対して外力が作用しない状態において引張コイルばね58の弾性力によって検出ローラ62の端部ローラ62aが係止部59にそれぞれ突き当たって係止されるように構成されている。 On the other hand, for example, a projecting locking
In this case, the locking
本実施の形態の場合、リミットレバーユニット60は、検出ローラ62がロープ往復送りねじ30(シフターブロック50)に対して上側となるように取り付けられている。
一方、ロープ往復送りねじ30の下方で、ロープ往復送りねじ30に対してガイド軸40の反対側には、直線状の回転支軸70に固定されたリミットドグ71が設けられている。
ここで、回転支軸70は、ロープ往復送りねじ30と平行に配置され、回転自在の状態で本体フレーム4aに取り付けられている。 In the case of the present embodiment, thelimit lever unit 60 is attached such that the detection roller 62 is on the upper side with respect to the rope reciprocating feed screw 30 (shifter block 50).
On the other hand, below the rope reciprocatingfeed screw 30 and on the opposite side of the rope reciprocating feed screw 30 from the guide shaft 40, a limit dog 71 fixed to the linear rotary support shaft 70 is provided.
Here, therotation support shaft 70 is arranged in parallel with the rope reciprocating feed screw 30 and is attached to the main body frame 4a in a rotatable state.
一方、ロープ往復送りねじ30の下方で、ロープ往復送りねじ30に対してガイド軸40の反対側には、直線状の回転支軸70に固定されたリミットドグ71が設けられている。
ここで、回転支軸70は、ロープ往復送りねじ30と平行に配置され、回転自在の状態で本体フレーム4aに取り付けられている。 In the case of the present embodiment, the
On the other hand, below the rope reciprocating
Here, the
リミットドグ71は、例えば回転支軸70の方向に延びる板状の部材からなり、その一方の面(ここでは上面)が、上述したリミットレバーユニット60の駆動ローラ63と接触するように、リミットレバーユニット60の駆動部61aの寸法(長さ)、回転支軸70の位置、リミットドグ71の大きさ及び形状が設定されている(図17(a)(c)参照)。
The limit dog 71 is made of, for example, a plate-like member extending in the direction of the rotation support shaft 70, and the limit lever unit is configured such that one surface (here, the upper surface) is in contact with the drive roller 63 of the limit lever unit 60 described above. The dimension (length) of the drive part 61a of 60, the position of the rotation spindle 70, and the size and shape of the limit dog 71 are set (see FIGS. 17A and 17C).
そして、リミットドグ71には、例えばねじりコイルばね72が連結されており、リミットドグ71に外力が作用しない状態において、ねじりコイルばね72の弾性力によって、検出ローラ62の端部ローラ62aが係止部59にそれぞれ突き当たって係止された状態の、リミットレバーユニット60の駆動ローラ63と接触するように構成されている(図17(c)参照)。
For example, a torsion coil spring 72 is connected to the limit dog 71, and the end roller 62 a of the detection roller 62 is engaged with the locking portion 59 by the elastic force of the torsion coil spring 72 when no external force is applied to the limit dog 71. Are configured to come into contact with the driving roller 63 of the limit lever unit 60 (see FIG. 17C).
また、回転支軸70の例えば一方の端部には、リミットカム73が設けられ(図17(a)参照)、このリミットカム73の例えば円弧状のカム面と対向する位置には、リミットスイッチ75が設けられている。
Further, a limit cam 73 is provided at, for example, one end of the rotation support shaft 70 (see FIG. 17A), and a limit switch is provided at a position facing the arc-shaped cam surface of the limit cam 73, for example. 75 is provided.
このリミットスイッチ75は、図17(c)に示すリミットドグ71が斜め上方を向いてリミットレバーユニット60の駆動ローラ63と接触した状態ではオフとなり、リミットドグ71が押し下げられた状態においてオンとなるように構成されている。
The limit switch 75 is turned off when the limit dog 71 shown in FIG. 17C faces obliquely upward and contacts the driving roller 63 of the limit lever unit 60, and is turned on when the limit dog 71 is pushed down. It is configured.
図18(a)(b)は、ロープ逆巻検知機構の動作を示す説明図である。
本発明のような多層巻きを行う装置において、巻下げ中にロープ20の列溝が崩れてくると、列間において隙間が発生し、ロープ20がその隙間に食い込み易くなる。 18A and 18B are explanatory views showing the operation of the rope reverse winding detection mechanism.
In the apparatus for performing multi-layer winding as in the present invention, if the row groove of therope 20 collapses during lowering, a gap is generated between the rows, and the rope 20 is likely to bite into the gap.
本発明のような多層巻きを行う装置において、巻下げ中にロープ20の列溝が崩れてくると、列間において隙間が発生し、ロープ20がその隙間に食い込み易くなる。 18A and 18B are explanatory views showing the operation of the rope reverse winding detection mechanism.
In the apparatus for performing multi-layer winding as in the present invention, if the row groove of the
このような隙間にロープ20が食い込んだ場合には、ロープ20が損傷するばかりでなく、食い込んだロープ20が抜けないため、巻下げ中にロープ20が他のロープ20に固着されて巻きほどいていくことができず、結果として巻上状態に陥ってしまう(本明細書では「逆巻状態」という)。
このような逆巻状態は、ドラム10からロープ20が完全に巻き出された場合においても発生する。 When therope 20 bites into such a gap, the rope 20 is not only damaged, but the rope 20 that has bitten cannot be removed, so that the rope 20 is fixed to the other rope 20 during unwinding and unwound. As a result, it falls into a hoisting state (referred to as “reverse winding state” in this specification).
Such a reverse winding state occurs even when therope 20 is completely unwound from the drum 10.
このような逆巻状態は、ドラム10からロープ20が完全に巻き出された場合においても発生する。 When the
Such a reverse winding state occurs even when the
本実施の形態のロープ逆巻検知機構では、図18(a)に示す通常の巻下げ状態においてロープ20の逆巻が発生すると、図18(b)に示すように、シフターブロック50に取り付けられたリミットレバーユニット60の検出ローラ62の内側押圧ローラ62bが、巻方向が反転したロープ20により押されて作動するようになっている。
In the rope reverse winding detection mechanism of the present embodiment, when the reverse winding of the rope 20 occurs in the normal lowering state shown in FIG. 18 (a), the rope 20 is attached to the shifter block 50 as shown in FIG. 18 (b). The inner pressing roller 62b of the detection roller 62 of the limit lever unit 60 is pushed by the rope 20 whose direction of winding is reversed to operate.
すなわち、ガイド軸40側からロープ往復送りねじ30側に経路が変位したロープ20が検出ローラ62の内側押圧ローラ62bをロープ往復送りねじ30に向って押し、これにより、リミットレバーユニット60が引張コイルばね58の弾性力に抗して支軸56を中心として回転し、リミットレバーユニット60の駆動部61aの先端部に設けた駆動ローラ63がリミットドグ71を下方に押し下げ、その結果、リミットスイッチ75がオンとなる。これにより、モータ7の巻下げ動作を停止する。
That is, the rope 20 whose path is displaced from the guide shaft 40 side to the rope reciprocating feed screw 30 side pushes the inner pressing roller 62b of the detection roller 62 toward the rope reciprocating feed screw 30, and thereby the limit lever unit 60 is pulled by the tension coil. The drive roller 63 provided at the front end of the drive portion 61a of the limit lever unit 60 pushes down the limit dog 71 downward, and the limit switch 75 is turned off. Turn on. Thereby, the lowering operation of the motor 7 is stopped.
モータ7の動作が停止した場合には、巻上方向にモータ7を動作させて逆巻状態のロープ20を元の位置に戻すことにより、ロープ20から検出ローラ62の内側押圧ローラ62bに対して力が作用しなくなるため、引張コイルばね58の弾性力によってリミットレバーユニット60が支軸56を中心として回転し、図18(a)に示す元の状態に戻り、検出ローラ62の端部ローラ62aが係止部59にそれぞれ突き当たって係止される。
When the operation of the motor 7 is stopped, the motor 7 is operated in the winding direction to return the rope 20 in the reverse winding state to the original position, so that the rope 20 is pressed against the inner pressing roller 62b of the detection roller 62. Since the force no longer acts, the limit lever unit 60 rotates around the support shaft 56 by the elastic force of the tension coil spring 58, returns to the original state shown in FIG. 18A, and the end roller 62a of the detection roller 62 Are brought into contact with the locking portions 59 and locked.
この場合においても、本実施の形態では、検出ローラ62の内側押圧ローラ62bは検出ローラ62の端部ローラ62aよりローラ径が小さく、シフターブロック51の係止部59に端部ローラ62aが押し付けられた場合であっても、回転自在となっている。このため、ロープ20に対して内側押圧ローラ62bが回転して滑りロープ20を傷めることはない。
Even in this case, in this embodiment, the inner pressing roller 62b of the detection roller 62 has a smaller roller diameter than the end roller 62a of the detection roller 62, and the end roller 62a is pressed against the locking portion 59 of the shifter block 51. Even if it is a case, it is freely rotatable. For this reason, the inner pressing roller 62b does not rotate with respect to the rope 20, and the sliding rope 20 is not damaged.
以上述べたように本実施の形態によれば、巻下げ中に過大な荷重が掛かりロープ20が列間に食い込んでロープ20の逆巻が発生した場合、またドラム10からロープ20を全部巻き出した場合であっても、直ちに動作を停止させることができる。
その結果、運転時の異常を検出できるため、ロープ20の乱巻を未然に防ぐことができる。 As described above, according to the present embodiment, when an excessive load is applied during the lowering and therope 20 bites between the rows and the reverse winding of the rope 20 occurs, the entire rope 20 is unwound from the drum 10. Even in this case, the operation can be stopped immediately.
As a result, abnormalities during operation can be detected, so that random winding of therope 20 can be prevented.
その結果、運転時の異常を検出できるため、ロープ20の乱巻を未然に防ぐことができる。 As described above, according to the present embodiment, when an excessive load is applied during the lowering and the
As a result, abnormalities during operation can be detected, so that random winding of the
また、本実施の形態では、ロープ20を全部巻き出した後に、リミットスイッチ75が動作して停止した場合であっても、ロープ20の先端部がドラム本体部11から抜け落ちないようにロープ取出口11aと連結する雌ねじ部11cをロープ止め金具11eで固定するようにしている(この点については後述する。図24(a)(b)参照)。
Further, in the present embodiment, even when the limit switch 75 is operated and stopped after the rope 20 is completely unwound, the rope outlet is arranged so that the tip end portion of the rope 20 does not fall out of the drum body 11. The female thread portion 11c connected to 11a is fixed by a rope stopper 11e (this point will be described later, see FIGS. 24A and 24B).
そして、このような構成により、ドラム10からロープ20を全部巻き出した場合であっても、再び問題なくロープ20の巻取を行うことができる。
また、万一ロープ20がドラム本体部11のガイド部12から外れた場合であっても、上述したように、ドラム本体部11のガイド部12は凸曲面形状に形成されているため、ロープ20に損傷が生ずることはない。 And by such a structure, even if it is a case where all theropes 20 are unwound from the drum 10, the rope 20 can be wound up again without a problem.
Even if therope 20 is removed from the guide portion 12 of the drum main body portion 11, as described above, the guide portion 12 of the drum main body portion 11 is formed in a convex curved surface shape. There will be no damage.
また、万一ロープ20がドラム本体部11のガイド部12から外れた場合であっても、上述したように、ドラム本体部11のガイド部12は凸曲面形状に形成されているため、ロープ20に損傷が生ずることはない。 And by such a structure, even if it is a case where all the
Even if the
図19(a)(b)は、本発明に用いる無負荷検知機構の無負荷検知レバーユニットを示すもので、図19(a)は無負荷検知用ガイドシーブ側から見た部分断面図、図19(b)は側面図、図19(c)はガイドシーブ側から見た部分断面図である。
また、図20(a)~(c)は、同無負荷検知機構の構成を示すもので、図20(a)は全体構成を示す正面部分断面図、図20(b)は同無負荷検知機構の要部構成を示す側面図、図20(c)は同無負荷検知機構の全体構成を示す側面図である。 19 (a) and 19 (b) show the no-load detection lever unit of the no-load detection mechanism used in the present invention. FIG. 19 (a) is a partial sectional view as seen from the guide sheave side for no-load detection. 19 (b) is a side view, and FIG. 19 (c) is a partial sectional view as seen from the guide sheave side.
20 (a) to 20 (c) show the configuration of the no-load detection mechanism, FIG. 20 (a) is a front partial sectional view showing the entire configuration, and FIG. 20 (b) is the no-load detection mechanism. The side view which shows the principal part structure of a mechanism, FIG.20 (c) is a side view which shows the whole structure of the no-load detection mechanism.
また、図20(a)~(c)は、同無負荷検知機構の構成を示すもので、図20(a)は全体構成を示す正面部分断面図、図20(b)は同無負荷検知機構の要部構成を示す側面図、図20(c)は同無負荷検知機構の全体構成を示す側面図である。 19 (a) and 19 (b) show the no-load detection lever unit of the no-load detection mechanism used in the present invention. FIG. 19 (a) is a partial sectional view as seen from the guide sheave side for no-load detection. 19 (b) is a side view, and FIG. 19 (c) is a partial sectional view as seen from the guide sheave side.
20 (a) to 20 (c) show the configuration of the no-load detection mechanism, FIG. 20 (a) is a front partial sectional view showing the entire configuration, and FIG. 20 (b) is the no-load detection mechanism. The side view which shows the principal part structure of a mechanism, FIG.20 (c) is a side view which shows the whole structure of the no-load detection mechanism.
図19(a)~(c)に示すように、無負荷検知機構は、上述したシフターブロック50に取り付けられる無負荷検知レバーユニット80を備えている。
無負荷検知レバーユニット80は、一対の同形状の無負荷検知レバー81と、これら一対の無負荷検知レバー81に取り付けられる無負荷検知用ガイドシーブ82及び駆動ローラ83とを有している。 As shown in FIGS. 19A to 19C, the no-load detection mechanism includes the no-loaddetection lever unit 80 attached to the shifter block 50 described above.
The no-loaddetection lever unit 80 includes a pair of no-load detection levers 81 having the same shape, and a no-load detection guide sheave 82 and a driving roller 83 attached to the pair of no-load detection levers 81.
無負荷検知レバーユニット80は、一対の同形状の無負荷検知レバー81と、これら一対の無負荷検知レバー81に取り付けられる無負荷検知用ガイドシーブ82及び駆動ローラ83とを有している。 As shown in FIGS. 19A to 19C, the no-load detection mechanism includes the no-load
The no-load
無負荷検知レバー81は、例えば細長板状の本体部81aを有し、この本体部81aの一方側の斜め側方に延びるように形成された駆動突部81bを有している。
一対の無負荷検知レバー81は、シフターブロック50の内側に設けられている。 The no-load detection lever 81 has, for example, an elongated plate-like main body portion 81a, and has a drive projection 81b formed so as to extend obliquely to one side of the main body portion 81a.
The pair of no-load detection levers 81 is provided inside theshifter block 50.
一対の無負荷検知レバー81は、シフターブロック50の内側に設けられている。 The no-
The pair of no-load detection levers 81 is provided inside the
そして、無負荷検知レバー81の本体部81aの一方の端部には、上述したロープ送り機構及びロープ逆巻検知機構に用いられたガイドシーブ53が一対の無負荷検知レバー81によって挟まれるように設けられ、無負荷検知レバー81の本体部81aの他方の端部(駆動突部81bが設けられた側の端部)には、後述する無負荷検知用ガイドシーブ82が一対の無負荷検知レバー81によって挟まれるように設けられている。
The guide sheave 53 used in the rope feed mechanism and the rope reverse winding detection mechanism described above is sandwiched between the pair of no-load detection levers 81 at one end of the main body 81 a of the no-load detection lever 81. A no-load detection guide sheave 82, which will be described later, is provided at the other end of the main body 81a of the no-load detection lever 81 (the end on the side where the drive protrusion 81b is provided). 81 so as to be sandwiched by 81.
ここで、ガイドシーブ53に設けられた玉軸受54の両側には、カラー54aが設けられ、このカラー54aの回りを無負荷検知レバー81が回転するように構成されている。
Here, a collar 54a is provided on both sides of the ball bearing 54 provided in the guide sheave 53, and the no-load detection lever 81 is configured to rotate around the collar 54a.
一方、無負荷検知レバー81の本体部81aの駆動突部81bが設けられている側の端部の間には、無負荷検知用ガイドシーブ82が設けられている。
ここで、無負荷検知用ガイドシーブ82は、一対の無負荷検知レバー81をガイド軸40と平行に設けられた円柱形状のピン84が貫通し、このピン84とカラー85及び軸用止め輪(図示せず)によって固定される玉軸受86を介して回転自在に取り付けられている。 On the other hand, a no-loaddetection guide sheave 82 is provided between the end portions of the main body 81a of the no-load detection lever 81 on the side where the drive protrusion 81b is provided.
Here, the no-loaddetection guide sheave 82 includes a pair of no-load detection levers 81 through which a cylindrical pin 84 provided in parallel with the guide shaft 40 passes, and the pin 84, collar 85, and shaft retaining ring ( It is rotatably mounted via a ball bearing 86 fixed by a not-shown).
ここで、無負荷検知用ガイドシーブ82は、一対の無負荷検知レバー81をガイド軸40と平行に設けられた円柱形状のピン84が貫通し、このピン84とカラー85及び軸用止め輪(図示せず)によって固定される玉軸受86を介して回転自在に取り付けられている。 On the other hand, a no-load
Here, the no-load
各無負荷検知レバー81の駆動突部81bの先端部の外側部分には、ガイド軸40と平行な支軸87を中心として回転可能な状態でそれぞれ駆動ローラ83が取り付けられている。
A driving roller 83 is attached to the outer portion of the tip of the driving protrusion 81b of each no-load detection lever 81 so as to be rotatable around a support shaft 87 parallel to the guide shaft 40.
このような構成を有する無負荷検知レバーユニット80は、シフターブロック50の内側の位置において、上述したガイド軸40の回転軸線を中心として、回転自在に取り付けられる(図20(b)参照)。
この場合、無負荷検知レバーユニット80の無負荷検知用ガイドシーブ82及び駆動ローラ83がシフターブロック50の本体部51に対して下方に位置し、かつ、駆動ローラ83がロープ往復送りねじ30側に位置するように配置される。 The no-loaddetection lever unit 80 having such a configuration is rotatably mounted around the rotation axis of the guide shaft 40 described above at a position inside the shifter block 50 (see FIG. 20B).
In this case, the no-loaddetection guide sheave 82 and the drive roller 83 of the no-load detection lever unit 80 are positioned below the main body 51 of the shifter block 50, and the drive roller 83 is on the rope reciprocating feed screw 30 side. It is arranged to be located.
この場合、無負荷検知レバーユニット80の無負荷検知用ガイドシーブ82及び駆動ローラ83がシフターブロック50の本体部51に対して下方に位置し、かつ、駆動ローラ83がロープ往復送りねじ30側に位置するように配置される。 The no-load
In this case, the no-load
そして、無負荷検知レバーユニット80の無負荷検知レバー81の駆動突部81bの先端部の内側部分に、上述したリミットレバー61の駆動ローラ63が入り込むように配置構成されている(図15、図19(a)参照)。
Then, the drive roller 63 of the limit lever 61 described above is arranged and configured so as to enter the inner portion of the tip of the drive protrusion 81b of the no-load detection lever 81 of the no-load detection lever unit 80 (FIGS. 15 and 15). 19 (a)).
無負荷検知レバーユニット80は、シフターブロック50のガイド軸40側端部に固定された取付金具57bに一方の端部が取り付けられ他方の端部が無負荷検知レバーユニット80のピン84(図19(a)(b)参照)に取り付けられた引張コイルばね58の弾性力によって、駆動突部81bがシフターブロック50のガイド軸40側端部に引っ張られるように構成されている。
In the no-load detection lever unit 80, one end is attached to the mounting bracket 57b fixed to the end of the shifter block 50 on the guide shaft 40 side, and the other end is a pin 84 of the no-load detection lever unit 80 (FIG. 19). The driving protrusion 81b is configured to be pulled to the end of the shifter block 50 on the side of the guide shaft 40 by the elastic force of the tension coil spring 58 attached to (a) and (b).
そして、図20(c)に示すように、ドラム本体部11から巻き出されたロープ20をシフターブロック50の本体部51の上方から本体部51内を通してガイドシーブ53のシーブ溝53aにロープ20の一方側の側部が接触し、無負荷検知レバーユニット80の一対の無負荷検知レバー81の間を通し、無負荷検知用ガイドシーブ82のシーブ溝82aにロープ20の他方側の側部が接触するように構成されている。
Then, as shown in FIG. 20 (c), the rope 20 unwound from the drum body 11 passes through the body 51 from above the body 51 of the shifter block 50 and enters the sheave groove 53 a of the guide sheave 53. One side is in contact, passes between the pair of no-load detection levers 81 of the no-load detection lever unit 80, and the other side of the rope 20 contacts the sheave groove 82a of the no-load detection guide sheave 82. Is configured to do.
本実施の形態では、ロングローラ41、42の間を通ってロープ20が直下に垂れるようになっている。この場合、ロープ20は、ガイドシーブ53とロングローラ41のほぼ中央に位置する無負荷検知用ガイドシーブ82のピン84に取り付けられた引張コイルばね58の弾性力によってガイドシーブ53側のロングローラ41に押し付けられている。
In the present embodiment, the rope 20 hangs directly under the long rollers 41 and 42. In this case, the rope 20 has the long roller 41 on the side of the guide sheave 53 by the elastic force of the tension coil spring 58 attached to the pin 84 of the no-load detection guide sheave 82 located substantially at the center between the guide sheave 53 and the long roller 41. It is pressed against.
本実施の形態では、以下のように、ばね力が設定されている。
すなわち、巻下げ中におけるロープ20の張力が所定の設定値(例えば定格荷重の8%)より大きい場合に、ロープ20のたわみが殆どない状態で、引張コイルばね58の弾性力によって無負荷検知用ガイドシーブ82からロープ20に加わる力と、ロープ20の張力に基づきロープ20から無負荷検知用ガイドシーブ82に与える力とが釣り合うように設定する。 In the present embodiment, the spring force is set as follows.
In other words, when the tension of therope 20 during the lowering is larger than a predetermined set value (for example, 8% of the rated load), there is almost no deflection of the rope 20 and no load is detected by the elastic force of the tension coil spring 58. The force applied to the rope 20 from the guide sheave 82 and the force applied from the rope 20 to the no-load detection guide sheave 82 based on the tension of the rope 20 are set to be balanced.
すなわち、巻下げ中におけるロープ20の張力が所定の設定値(例えば定格荷重の8%)より大きい場合に、ロープ20のたわみが殆どない状態で、引張コイルばね58の弾性力によって無負荷検知用ガイドシーブ82からロープ20に加わる力と、ロープ20の張力に基づきロープ20から無負荷検知用ガイドシーブ82に与える力とが釣り合うように設定する。 In the present embodiment, the spring force is set as follows.
In other words, when the tension of the
そして、その状態において、図20(c)に示すように、無負荷検知レバーユニット80の駆動ローラ83が、斜め上方を向いてオフとなったリミットスイッチ75のリミットドグ71の上面と接触するように構成されている。
In this state, as shown in FIG. 20 (c), the drive roller 83 of the no-load detection lever unit 80 comes in contact with the upper surface of the limit dog 71 of the limit switch 75 turned diagonally upward. It is configured.
なお、荷物を吊り下げない状態においてリミットスイッチ75がオンにならないように、ロープ20の張力が例えば8~10%となるようにフックと錘の重量を調整する。
It should be noted that the weights of the hook and weight are adjusted so that the tension of the rope 20 is, for example, 8 to 10% so that the limit switch 75 is not turned on when the load is not suspended.
図21(a)(b)は、無負荷検知機構の動作を示す説明図である。
このような構成を有する無負荷検知機構において、ロープ20に荷物を吊り下げた状態でドラム10を回転させて巻下げを行うと、ロープ20の張力が設定値以上になっているので、ロープ20のたわみが殆どない状態で、引張コイルばね58の弾性力によって無負荷検知用ガイドシーブ82からロープ20に加わる力と、ロープ20の張力に基づきロープ20から無負荷検知用ガイドシーブ82に与える力とが釣り合っているため、図21(a)に示すように、リミットスイッチ75はオフになっている。 FIGS. 21A and 21B are explanatory diagrams showing the operation of the no-load detection mechanism.
In the no-load detection mechanism having such a configuration, when thedrum 10 is rotated while being hanged on the rope 20 to perform the lowering, the tension of the rope 20 becomes equal to or higher than the set value. The force applied to the rope 20 from the no-load detection guide sheave 82 by the elastic force of the tension coil spring 58 and the force applied from the rope 20 to the no-load detection guide sheave 82 based on the tension of the rope 20 in a state where there is almost no deflection. Therefore, as shown in FIG. 21A, the limit switch 75 is turned off.
このような構成を有する無負荷検知機構において、ロープ20に荷物を吊り下げた状態でドラム10を回転させて巻下げを行うと、ロープ20の張力が設定値以上になっているので、ロープ20のたわみが殆どない状態で、引張コイルばね58の弾性力によって無負荷検知用ガイドシーブ82からロープ20に加わる力と、ロープ20の張力に基づきロープ20から無負荷検知用ガイドシーブ82に与える力とが釣り合っているため、図21(a)に示すように、リミットスイッチ75はオフになっている。 FIGS. 21A and 21B are explanatory diagrams showing the operation of the no-load detection mechanism.
In the no-load detection mechanism having such a configuration, when the
この状態で荷物が地面に着地した場合には、ロープ20の張力がなくなるため、ロープ20から無負荷検知用ガイドシーブ82に与える力が消滅する。
その結果、図21(b)に示すように、引張コイルばね58の弾性力によって無負荷検知レバー81がガイド軸40の回転軸線を中心として図中反時計回り方向へ回転し、これにより駆動ローラ83がリミットドグ71を下方に押し下げ、リミットスイッチ75がオンとなるので、モータ7の動作が停止する。 When the load reaches the ground in this state, the tension applied to the no-loaddetection guide sheave 82 disappears because the tension of the rope 20 is lost.
As a result, as shown in FIG. 21 (b), the no-load detection lever 81 rotates about the rotation axis of the guide shaft 40 counterclockwise by the elastic force of the tension coil spring 58, thereby driving roller Since 83 pushes down the limit dog 71 downward and the limit switch 75 is turned on, the operation of the motor 7 is stopped.
その結果、図21(b)に示すように、引張コイルばね58の弾性力によって無負荷検知レバー81がガイド軸40の回転軸線を中心として図中反時計回り方向へ回転し、これにより駆動ローラ83がリミットドグ71を下方に押し下げ、リミットスイッチ75がオンとなるので、モータ7の動作が停止する。 When the load reaches the ground in this state, the tension applied to the no-load
As a result, as shown in FIG. 21 (b), the no-
この場合、ロープ20に対して上述した設定値以上の張力を与えると、ロープ20はほぼ直線となり、リミットスイッチ75が復帰するため、巻下げ運転が可能になる。
In this case, when a tension equal to or higher than the set value described above is applied to the rope 20, the rope 20 becomes almost a straight line, and the limit switch 75 is restored, so that the lowering operation can be performed.
本発明のような平行巻取りを行う装置において、荷物が着地してロープに一定以上の張力が無くなった場合、その後も巻下げすると、ドラムに巻かれたロープがジャンピングし、乱巻を起こさせるが、本実施の形態によれば、巻下げ中にロープ20の張力が定格荷重の例えば8%以下となったとき、自動的に停止させることができるので、このような不都合が生ずることはない。
In a device for performing parallel winding as in the present invention, when a load lands and the rope loses a certain level of tension, the rope wound around the drum jumps and causes turbulence when the rope is subsequently lowered. However, according to the present embodiment, when the tension of the rope 20 becomes, for example, 8% or less of the rated load during the lowering, it can be automatically stopped, so that such inconvenience does not occur. .
さらに、従来のホイストは2本掛け以上のロープが多く、無負荷状態については固定側ロープを使用することで簡単に荷重検知することが可能であったが、1本吊りの装置の場合には別途固定滑車を付けるなど、装置として大きくなる。
Furthermore, many conventional hoists have two or more ropes, and in the no-load state, it was possible to easily detect the load by using the fixed side rope. It becomes larger as a device, such as attaching a fixed pulley separately.
しかるに、本実施の形態によれば、シフターブロック50と無負荷検知レバーユニット80を組み合わせることによってコンパクトな構成とすることができる。
However, according to the present embodiment, a compact configuration can be obtained by combining the shifter block 50 and the no-load detection lever unit 80.
図22(a)(b)は、ロープ押え機構の構成を示す図で、図23は、同ロープ押え機構のロープ押えローラの寸法関係を示す説明図である。
図22(a)(b)に示すように、ロープ押え機構90は、ロープ20の巻上げ及び巻下げの際にロープ押えローラ91によってロープ20の表面を押圧するものである。 22A and 22B are diagrams showing the configuration of the rope presser mechanism, and FIG. 23 is an explanatory diagram showing the dimensional relationship of the rope presser roller of the rope presser mechanism.
As shown in FIGS. 22A and 22B, therope presser mechanism 90 presses the surface of the rope 20 by the rope presser roller 91 when the rope 20 is wound up and down.
図22(a)(b)に示すように、ロープ押え機構90は、ロープ20の巻上げ及び巻下げの際にロープ押えローラ91によってロープ20の表面を押圧するものである。 22A and 22B are diagrams showing the configuration of the rope presser mechanism, and FIG. 23 is an explanatory diagram showing the dimensional relationship of the rope presser roller of the rope presser mechanism.
As shown in FIGS. 22A and 22B, the
ここで、ロープ押えローラ91は円筒状に形成され、例えばL字状の2本のアーム92の一方の長辺側の端部において、回転軸93を中心として回転自在に取り付けられている。
各アーム92の短辺側の端部は、例えばホイスト1の装置本体部4の上部に設けられた支軸94を中心として回転自在に設けられている。 Here, therope presser roller 91 is formed in a cylindrical shape, and is attached to the end of one long side of two L-shaped arms 92, for example, so as to be rotatable around the rotation shaft 93.
An end portion on the short side of eacharm 92 is provided so as to be rotatable about a support shaft 94 provided on the upper portion of the apparatus main body 4 of the hoist 1, for example.
各アーム92の短辺側の端部は、例えばホイスト1の装置本体部4の上部に設けられた支軸94を中心として回転自在に設けられている。 Here, the
An end portion on the short side of each
ここで、アーム92の両端部に設けられた支軸94は、それぞれドラム10の回転軸線Oと平行に配置され、これによりロープ押えローラ91がドラム本体部11と平行になるように配置構成されている。
Here, the support shafts 94 provided at both ends of the arm 92 are respectively arranged in parallel with the rotation axis O of the drum 10, so that the rope presser roller 91 is arranged in parallel with the drum main body 11. ing.
ロープ押えローラ91は、例えば支軸94に設けたねじりコイルばね97の弾性力によってアーム92をドラム本体部11側に付勢することにより、ロープ20をドラム本体部11に対して押し付けるように構成されている。
The rope pressing roller 91 is configured to press the rope 20 against the drum body 11 by urging the arm 92 toward the drum body 11 by the elastic force of the torsion coil spring 97 provided on the support shaft 94, for example. Has been.
なお、アーム92の支軸94側の端部には、リミットカム95が取り付けられ、アーム92の動作に伴い、その近傍に設けられたリミットスイッチ96をオン・オフするようになっている。
A limit cam 95 is attached to the end portion of the arm 92 on the support shaft 94 side, and a limit switch 96 provided in the vicinity thereof is turned on / off in accordance with the operation of the arm 92.
図23に示すように、ロープ押えローラ91は、ドラム本体部11の幅より若干長さが短いもので、その中央部91aから軸方向に両端部91bに向ってテーパ部91cを介して細くなるように形成され、これによりロープ押えローラ91の両端部91bの直径φDが、中央部91aの直径φAより小さくなるように構成されている。
As shown in FIG. 23, the rope presser roller 91 is slightly shorter than the width of the drum main body 11, and narrows from the central portion 91a toward the both end portions 91b in the axial direction via the tapered portions 91c. Thus, the diameter φD of both end portions 91b of the rope presser roller 91 is configured to be smaller than the diameter φA of the central portion 91a.
その理由は以下のとおりである。
すなわち、従来の平行溝を有するドラムにおいてロープを巻き付ける場合、ロープを1層上の層に乗り移りの際に、ローラ等の手段によってロープを押え付けると、ロープが多段に積み上がってしまう。
このような現象が発生すると、ロープの乱巻となるため、ロープの上層への乗り移りの際には、ロープを他の部材に接触させないフリーの状態にする必要がある。 The reason is as follows.
That is, when a rope is wound on a drum having a conventional parallel groove, when the rope is transferred to a layer on one layer and the rope is pressed by means such as a roller, the ropes are stacked in multiple stages.
When such a phenomenon occurs, the rope is wound in a random manner. Therefore, when transferring to the upper layer of the rope, it is necessary to make the rope free from contact with other members.
すなわち、従来の平行溝を有するドラムにおいてロープを巻き付ける場合、ロープを1層上の層に乗り移りの際に、ローラ等の手段によってロープを押え付けると、ロープが多段に積み上がってしまう。
このような現象が発生すると、ロープの乱巻となるため、ロープの上層への乗り移りの際には、ロープを他の部材に接触させないフリーの状態にする必要がある。 The reason is as follows.
That is, when a rope is wound on a drum having a conventional parallel groove, when the rope is transferred to a layer on one layer and the rope is pressed by means such as a roller, the ropes are stacked in multiple stages.
When such a phenomenon occurs, the rope is wound in a random manner. Therefore, when transferring to the upper layer of the rope, it is necessary to make the rope free from contact with other members.
また、平行巻を行うドラムでは、その特性により、ロープの各層毎に0.5ピッチずれるため、上述した理由から、例えば本実施の形態では、図23において符合Bで表すように、ドラム本体部11のガイド部12の1.5ピッチ分はロープ20に接触しないようにする必要がある。
Further, in the drum that performs parallel winding, because of the characteristic, the pitch is shifted by 0.5 pitch for each layer of the rope. For the reason described above, for example, in this embodiment, the drum main body portion is represented by reference numeral B in FIG. It is necessary not to contact the rope 20 for 1.5 pitches of the 11 guide portions 12.
そこで、本実施の形態では、このような事情を考慮して、テーパ部91cの寸法及び傾斜角度を設定するようにしている。
一方、本実施の形態のドラム10においては、第1及び第2の交差部16、17において、巻き付け中のロープ20が1層下のロープ20の傾斜方向と反対方向に傾斜させて乗り上げさせることによって巻き付けられる。 Therefore, in the present embodiment, in consideration of such circumstances, the size and the inclination angle of the taperedportion 91c are set.
On the other hand, in thedrum 10 of the present embodiment, the rope 20 being wound is inclined on the first and second intersecting portions 16 and 17 in a direction opposite to the inclination direction of the rope 20 that is one layer below. Wound by.
一方、本実施の形態のドラム10においては、第1及び第2の交差部16、17において、巻き付け中のロープ20が1層下のロープ20の傾斜方向と反対方向に傾斜させて乗り上げさせることによって巻き付けられる。 Therefore, in the present embodiment, in consideration of such circumstances, the size and the inclination angle of the tapered
On the other hand, in the
この場合、第1及び第2の直線部14、15と、第1及び第2の交差部16、17とは、ドラム本体部11の表面上においてそれぞれ対称となるように設けられている(図5参照)ため、ドラム本体部11に巻き付けられたロープ20は、各層において断面形状が楕円形で、相対位置も同じ位置になっている。
In this case, the first and second straight portions 14 and 15 and the first and second intersecting portions 16 and 17 are provided so as to be symmetrical on the surface of the drum main body 11 (see FIG. Therefore, the rope 20 wound around the drum main body 11 has an elliptical cross-sectional shape in each layer, and the relative position is also the same.
したがって、ロープ押えローラ91の中央部91aの直径φAと、ロープ押えローラ91の両端部91bの直径φDとの差は、以下の式で表すことができる。
(φA-φD)/2=C
なお、この関係は、螺旋溝ドラム、円筒ドラムと比較して最も小さくすることができる。 Therefore, the difference between the diameter φA of thecentral portion 91a of the rope pressing roller 91 and the diameter φD of both end portions 91b of the rope pressing roller 91 can be expressed by the following equation.
(ΦA-φD) / 2 = C
This relationship can be minimized as compared with the spiral groove drum and the cylindrical drum.
(φA-φD)/2=C
なお、この関係は、螺旋溝ドラム、円筒ドラムと比較して最も小さくすることができる。 Therefore, the difference between the diameter φA of the
(ΦA-φD) / 2 = C
This relationship can be minimized as compared with the spiral groove drum and the cylindrical drum.
実際には、ロープ押えローラ91の摩耗やロープ20の張力によるロープ径φの微小変化sを考慮し、以下の式で表すことができる。
C=φ+s
以上述べたロープ押えローラ91を通過するロープ20には、常に最低張力(約8~10%)が与えられていることを条件としている。 Actually, in consideration of a slight change s of the rope diameter φ due to wear of therope presser roller 91 and tension of the rope 20, it can be expressed by the following equation.
C = φ + s
It is a condition that therope 20 passing through the rope presser roller 91 described above is always given a minimum tension (about 8 to 10%).
C=φ+s
以上述べたロープ押えローラ91を通過するロープ20には、常に最低張力(約8~10%)が与えられていることを条件としている。 Actually, in consideration of a slight change s of the rope diameter φ due to wear of the
C = φ + s
It is a condition that the
この理由は、ロープ20を完全な無負荷状態でドラム本体部11に巻き付けると、ロープ20がドラム本体部11のガイド部12に確実に接触せず、所謂ぐず巻(緩く巻き付けること)状態になってしまうからである。
The reason for this is that when the rope 20 is wound around the drum main body 11 in a completely unloaded state, the rope 20 does not reliably contact the guide portion 12 of the drum main body 11, and is in a so-called crumpled (loosely wound) state. Because it will end up.
そして、このような構成を有する本実施の形態によれば、ドラム本体部11にロープ20を巻き付ける際に、ドラム本体部11の全周にわたりロープ押えローラ91の中央部91aによってドラム本体部11の中央部分のロープ20が浮き上がらないように確実に押さえることができるとともに、ドラム本体部11の両端部においてロープ20の上層への乗り移りの際にはロープ押えローラ91に対してロープ20を接触させないようにすることができ、その結果、ロープ20の巻付の際における乱巻を確実に防止することができる。
And according to this Embodiment which has such a structure, when winding the rope 20 around the drum main-body part 11, the center part 91a of the rope presser roller 91 over the perimeter of the drum main-body part 11 WHEREIN: The rope 20 in the central portion can be surely pressed so as not to float, and the rope 20 should not be brought into contact with the rope presser roller 91 when transferring to the upper layer of the rope 20 at both ends of the drum body 11. As a result, it is possible to reliably prevent random winding when the rope 20 is wound.
図24(a)(b)及び図25(a)~(d)は、本実施の形態におけるロープ端末部分の浮き上がり防止機構を示すものである。
ここで、図24(a)はドラムの要部を示す側面図、図24(b)は図24(a)のA-A線断面図である。 24 (a), 24 (b) and FIGS. 25 (a) to 25 (d) show a mechanism for preventing the rope end portion from lifting up in the present embodiment.
Here, FIG. 24A is a side view showing the main part of the drum, and FIG. 24B is a cross-sectional view taken along line AA of FIG.
ここで、図24(a)はドラムの要部を示す側面図、図24(b)は図24(a)のA-A線断面図である。 24 (a), 24 (b) and FIGS. 25 (a) to 25 (d) show a mechanism for preventing the rope end portion from lifting up in the present embodiment.
Here, FIG. 24A is a side view showing the main part of the drum, and FIG. 24B is a cross-sectional view taken along line AA of FIG.
また、図25(a)は、従来のロープの先端部の構成を示す説明図、図25(b)は、従来のロープをドラム本体部に固定した場合を示す説明図、図25(c)は本実施の形態のロープの先端部の構成を示す説明図、図25(d)は本実施の形態のロープをドラム本体部に固定した場合を示す説明図である。
FIG. 25 (a) is an explanatory view showing the configuration of the tip of the conventional rope, FIG. 25 (b) is an explanatory view showing a case where the conventional rope is fixed to the drum body, and FIG. 25 (c). FIG. 25 is an explanatory view showing the configuration of the tip of the rope of the present embodiment, and FIG. 25D is an explanatory view showing a case where the rope of the present embodiment is fixed to the drum body.
本実施の形態では、ドラム本体部11の第1のフランジ10aの近傍に、ロープ20の先端部を収容する凹部状のロープ収容部11bが設けられ、このロープ収容部11b内にロープ20の先端部を挿入してロープ取出口11aからロープ20を引き出すように構成されている。
In the present embodiment, a concave rope housing portion 11b for housing the distal end portion of the rope 20 is provided in the vicinity of the first flange 10a of the drum main body portion 11, and the distal end of the rope 20 is placed in the rope housing portion 11b. It is comprised so that a rope 20 may be pulled out from the rope outlet 11a by inserting a part.
ロープ取出口11aは、ドラム本体部11の円周方向に延びるような例えば長円形状に形成され、その後端部には、ロープ取出口11aと連結するように円筒状の雌ねじ部11cが設けられている。この雌ねじ部11cは、雄ねじプラグであるロープ止め金具11eが噛み合ってその孔部が塞がれるようになっている(図24(b)参照)。
The rope outlet 11a is formed in, for example, an oval shape extending in the circumferential direction of the drum main body 11, and a cylindrical female screw portion 11c is provided at the rear end portion so as to be connected to the rope outlet 11a. ing. The female threaded portion 11c is configured such that a rope stopper 11e, which is a male threaded plug, meshes with the hole to close the hole (see FIG. 24B).
また、ロープ収容部11bには、ロープ取出口11aに沿って凸曲面状のロープガイド部11dが設けられており、このロープガイド部11dは、ロープ収容部11bからロープ取出口11aの先端部に向って深さが浅くなるように形成されている。
The rope accommodating portion 11b is provided with a convex curved rope guide portion 11d along the rope outlet 11a. The rope guide portion 11d extends from the rope accommodating portion 11b to the tip of the rope outlet 11a. It is formed so that the depth becomes shallower.
一般に、本発明のような荷役機械に用いるワイヤーロープは、その端部に、コブ状のロック管が設けられている。
従来、このようなロープ120を、ドラム本体部11のロープ取出口11aに挿入した後に上述したロープ止め金具11eで固定し、ドラム本体部11にロープ120を巻き付けると、ロープ120のロック管120aの近傍の引出部分120bが、ロープ120の剛性に起因してドラム本体部11の曲面形状の表面から少し浮き上がる現象が生ずる(図25(a)(b)参照)。 Generally, a wire rope used in a cargo handling machine such as the present invention is provided with a bump-shaped lock pipe at its end.
Conventionally, when such arope 120 is inserted into the rope outlet 11a of the drum body 11 and then fixed with the rope stopper 11e, and the rope 120 is wound around the drum body 11, the lock 120a of the rope 120 is A phenomenon occurs in which the adjacent drawn portion 120b slightly floats from the curved surface of the drum main body 11 due to the rigidity of the rope 120 (see FIGS. 25A and 25B).
従来、このようなロープ120を、ドラム本体部11のロープ取出口11aに挿入した後に上述したロープ止め金具11eで固定し、ドラム本体部11にロープ120を巻き付けると、ロープ120のロック管120aの近傍の引出部分120bが、ロープ120の剛性に起因してドラム本体部11の曲面形状の表面から少し浮き上がる現象が生ずる(図25(a)(b)参照)。 Generally, a wire rope used in a cargo handling machine such as the present invention is provided with a bump-shaped lock pipe at its end.
Conventionally, when such a
この浮き上がりが大きいと、上述したロープ押さえローラ91を設けた場合にロープ押えローラ91を押し上げるため、他の列のロープ120を均一に押圧することができず、乱巻の要因となる。
If this lift is large, the rope presser roller 91 is pushed up when the above-described rope presser roller 91 is provided, so that the ropes 120 of the other rows cannot be pressed uniformly, causing a turbulence.
また、この膨らみの上に巻かれたロープにより押し付けられ、浮き上がったロープ120の弛み部分が数列先までにわたって押し伸ばされるため、無負荷時などでは全体的にもドラム本体部11に巻き付けられたロープ120の張力が低下し、下層と上層のロープ120同士のスリップが発生しやすくなり、乱巻の要因となる。
そこで、本実施の形態においては、以下のような手段により、このような問題が生じないようにしている。 In addition, since the slack portion of therope 120 that is pressed by the rope wound on the bulge is stretched to several lines ahead, the rope that is entirely wound around the drum body 11 when no load is applied. The tension of 120 decreases, and slipping between the lower layer and upper layer ropes 120 is likely to occur, resulting in turbulence.
Therefore, in the present embodiment, such a problem is prevented from occurring by the following means.
そこで、本実施の形態においては、以下のような手段により、このような問題が生じないようにしている。 In addition, since the slack portion of the
Therefore, in the present embodiment, such a problem is prevented from occurring by the following means.
図25(c)に示すように、本実施の形態のロープ20は、ドラム本体部11の収容部11bからロープ20を引き出す際にロープ20を案内する部分の形状に対応するように先端部に曲げ加工が施されている。
As shown in FIG. 25 (c), the rope 20 of the present embodiment has a distal end portion corresponding to the shape of the portion that guides the rope 20 when the rope 20 is pulled out from the accommodating portion 11b of the drum main body portion 11. Bending is applied.
すなわち、ロープ20の先端部のロック管20a近傍の後端部側の引出部分20bが、ドラム本体部11のロープガイド部11dの曲面形状に対応するように例えば同等の曲率半径の曲げ加工が施され、さらに、引出部分20bのロープ後端部側の引き回し部分20cには、ドラム本体部11の表面と同等の曲率半径となるように曲げ加工が施されている。
That is, for example, bending of an equivalent radius of curvature is performed so that the drawn-out portion 20b on the rear end side in the vicinity of the lock tube 20a at the tip end portion of the rope 20 corresponds to the curved surface shape of the rope guide portion 11d of the drum main body portion 11. In addition, the routing portion 20c on the rope rear end side of the drawing portion 20b is bent so as to have the same radius of curvature as the surface of the drum body portion 11.
このような構成において、ロープ20をドラム本体部11に装着する場合には、ロープ20の先端部のロック管20aをドラム本体部11のロープ収容部11b内に配置し、ロープ20の後端部側の部分をロープ取出口11aの先端部側に引っ張り、そのままドラム本体部11の表面に巻き付ける。
In such a configuration, when the rope 20 is attached to the drum body 11, the lock tube 20 a at the tip of the rope 20 is disposed in the rope housing portion 11 b of the drum body 11, and the rear end of the rope 20. The portion on the side is pulled toward the tip end side of the rope outlet 11 a and is wound around the surface of the drum main body 11 as it is.
これにより、図24(b)及び図25(d)に示すように、ロープ20のロック管20aがロープ収容部11bの突起部分とロープ止め金具11eによって係止固定される。
Thus, as shown in FIGS. 24B and 25D, the lock tube 20a of the rope 20 is locked and fixed by the protruding portion of the rope accommodating portion 11b and the rope stopper 11e.
上述したように、ロープ20の引出部分20bは、ドラム本体部11のロープ20のロープガイド部11dの曲面形状に対応するように例えば同等の曲率半径の曲げ加工が施され、さらに、引出部分20bのロープ20後端部側の引き回し部分20cには、ドラム本体部11の表面と同等の曲率半径となるように曲げ加工が施されていることから、ロープ20の引出部分20bがドラム本体部11のロープガイド部11dと密着し、また、ロープ20の引き回し部分20cがドラム本体部11の表面即ち一対のガイド部12に密着する。
As described above, the drawn portion 20b of the rope 20 is subjected to, for example, bending processing with an equivalent curvature radius so as to correspond to the curved surface shape of the rope guide portion 11d of the rope 20 of the drum main body portion 11, and further, the drawn portion 20b. Since the bending portion 20c on the rear end portion side of the rope 20 is bent so as to have the same radius of curvature as the surface of the drum body portion 11, the drawing portion 20b of the rope 20 is provided with the drum body portion 11. The rope guide portion 11d is in close contact with each other, and the routing portion 20c of the rope 20 is in close contact with the surface of the drum main body portion 11, that is, the pair of guide portions 12.
このように、本実施の形態によれば、ドラム10に装着したロープ20はドラム本体部11から全く浮き上がらず、その結果、上述したロープ押さえローラ91の両端部91bの直径φDをぎりぎりまで大きくすることが可能となった。
As described above, according to the present embodiment, the rope 20 attached to the drum 10 does not float at all from the drum main body 11, and as a result, the diameter φD of the both ends 91b of the rope pressing roller 91 is increased to the limit. It became possible.
このことは、ロープ押えローラ91の中央部91aと両端部91bの径の差(図23中符合Cで示す部分)を小さくできることを意味し、テーパ部91cの長さを小さくできるため、ロープ押えローラ91の有効押え部分である中央部91aの長さを相対的に大きくすることができ、これによりロープ20の巻付の際における乱巻をより確実に防止することができる。
This means that the difference in diameter between the central portion 91a and both end portions 91b of the rope pressing roller 91 (the portion indicated by the symbol C in FIG. 23) can be reduced, and the length of the tapered portion 91c can be reduced. The length of the central portion 91a, which is an effective pressing portion of the roller 91, can be made relatively large, and thereby, it is possible to more reliably prevent turbulent winding when the rope 20 is wound.
また、本実施の形態によれば、ロープ20を多層に巻き取ったとき下層のロープ20内部の張力が弱まることを防ぐことができる。
すなわち、従来の構成では、ロープ120の端部の引出部分120bが浮き上がった状態でロープ120を多層巻をした場合における所謂押し延ばし効果によって下層の複数列におけるロープ120の内部の張力が弱まり、上層のロープ120が食い込みやすくなる。
このような状態になると、危険であるとともに、列が乱れ、乱巻を発生するが、本実施の形態によれば、このような事態を回避することができる。 Moreover, according to this Embodiment, when therope 20 is wound in multiple layers, it can prevent that the tension | tensile_strength inside the lower layer rope 20 weakens.
That is, in the conventional configuration, the tension inside theropes 120 in the plurality of lower layers is weakened by a so-called extending effect when the ropes 120 are wound in a multi-layered manner with the extended portion 120b of the end of the rope 120 raised, and the upper layer The rope 120 becomes easier to bite.
In such a state, it is dangerous and the row is disturbed and turbulence is generated. However, according to the present embodiment, such a situation can be avoided.
すなわち、従来の構成では、ロープ120の端部の引出部分120bが浮き上がった状態でロープ120を多層巻をした場合における所謂押し延ばし効果によって下層の複数列におけるロープ120の内部の張力が弱まり、上層のロープ120が食い込みやすくなる。
このような状態になると、危険であるとともに、列が乱れ、乱巻を発生するが、本実施の形態によれば、このような事態を回避することができる。 Moreover, according to this Embodiment, when the
That is, in the conventional configuration, the tension inside the
In such a state, it is dangerous and the row is disturbed and turbulence is generated. However, according to the present embodiment, such a situation can be avoided.
1…ホイスト(荷役機械)
4…装置本体部
7…モータ
10…ドラム(荷役機械用ドラム)
10a…第1のフランジ
10b…第2のフランジ
11…ドラム本体部
12…ガイド部
13…支持部
20…ロープ
30…ロープ往復送りねじ
40…ガイド軸
50…シフターブロック(移動体)
60…リミットレバーユニット
75…リミットスイッチ
80…無負荷検知レバーユニット
81…無負荷検知レバー
90…ロープ押え機構
91…ロープ押えローラ
120…従来技術のロープ 1 ... Hoist (handling machine)
4 ...Device body 7 ... Motor 10 ... Drum (Drum for cargo handling machine)
DESCRIPTION OFSYMBOLS 10a ... 1st flange 10b ... 2nd flange 11 ... Drum main-body part 12 ... Guide part 13 ... Support part 20 ... Rope 30 ... Rope reciprocating feed screw 40 ... Guide shaft 50 ... Shifter block (moving body)
60 ... Limitlever unit 75 ... Limit switch 80 ... No load detection lever unit 81 ... No load detection lever 90 ... Rope presser mechanism 91 ... Rope presser roller 120 ... Conventional rope
4…装置本体部
7…モータ
10…ドラム(荷役機械用ドラム)
10a…第1のフランジ
10b…第2のフランジ
11…ドラム本体部
12…ガイド部
13…支持部
20…ロープ
30…ロープ往復送りねじ
40…ガイド軸
50…シフターブロック(移動体)
60…リミットレバーユニット
75…リミットスイッチ
80…無負荷検知レバーユニット
81…無負荷検知レバー
90…ロープ押え機構
91…ロープ押えローラ
120…従来技術のロープ 1 ... Hoist (handling machine)
4 ...
DESCRIPTION OF
60 ... Limit
Claims (10)
- 平行巻でロープを多段に巻き付け可能な荷役機械用ドラムであって、
円筒形状のドラム本体部の表面に、前記ロープを支持して案内するための複数の凸曲面形状のガイド部が、前記ドラム本体部の円周方向に沿って所定の間隔で設けられている荷役機械用ドラム。 It is a drum for a cargo handling machine that can wind a rope in multiple stages with parallel winding,
Cargo handling in which a plurality of convex curved guide portions for supporting and guiding the rope are provided on the surface of the cylindrical drum main body portion at predetermined intervals along the circumferential direction of the drum main body portion. Machine drum. - 前記ガイド部が、前記ロープの半径と同等若しくは前記ロープの半径より大きな曲率半径を有する断面円弧形状に形成されている請求項1記載の荷役機械用ドラム。 The drum for a cargo handling machine according to claim 1, wherein the guide portion is formed in a circular arc shape having a radius of curvature equal to or larger than a radius of the rope.
- 前記ガイド部の間に、前記ロープを支持するための支持部が設けられている請求項1又は2のいずれか1項記載の荷役機械用ドラム。 The drum for a cargo handling machine according to any one of claims 1 and 2, wherein a support portion for supporting the rope is provided between the guide portions.
- 前記ドラム本体部に前記ロープの先端部を収容して固定するための凹部状のロープ収容部を有し、
前記ロープ収容部から当該ロープを引き出す際に当該ロープを案内する部分の形状に対応するように先端部に曲げ加工を施したロープを前記ドラム本体部のロープ収容部に収容して固定するように構成されている請求項1乃至3のいずれか1項記載の荷役機械用ドラム。 A concave rope housing portion for housing and fixing the tip of the rope to the drum body portion;
When a rope is pulled out from the rope housing portion, a rope having a bending process at the tip so as to correspond to the shape of the portion that guides the rope is housed and fixed in the rope housing portion of the drum main body portion. The drum for a cargo handling machine according to any one of claims 1 to 3, wherein the drum is configured. - 請求項1乃至4のいずれか1項記載の荷役機械用ドラムと、
前記荷役機械用ドラムを回転駆動させるドラム駆動機構と、
前記ドラム駆動機構の動作を制御する制御部とを有する荷役機械。 A drum for a cargo handling machine according to any one of claims 1 to 4,
A drum driving mechanism for rotating the drum for cargo handling machine;
A cargo handling machine having a control unit for controlling the operation of the drum driving mechanism. - 前記荷役機械用ドラムに巻き付ける際又は巻き付けられたロープを当該ドラムの回転軸線方向に案内移動させるためのロープ送り機構を更に有し、
当該ロープ送り機構は、
前記荷役機械用ドラムの回転軸線と平行に設けられ、前記荷役機械用ドラムと共に回転可能な棒状のロープ往復送りねじと、
前記ロープ往復送りねじのねじ部と噛み合うように装着され、前記ロープ往復送りねじの回転に伴って当該ロープ往復送りねじの長手方向に移動するように構成されるとともに、前記荷役機械用ドラムから巻き出されたロープを案内するロープ案内部を有するブロック状の移動体と、
前記ロープ往復送りねじと平行に設けられ、前記移動体と接触して当該移動体を案内するための棒状のガイド軸とを有し、
前記ガイド軸が回転可能に構成されている請求項5記載の荷役機械。 A rope feeding mechanism for guiding and moving the rope wound around the drum for the cargo handling machine or in the direction of the rotation axis of the drum;
The rope feed mechanism
A rod-shaped rope reciprocating feed screw which is provided in parallel with the rotation axis of the cargo handling machine drum and is rotatable together with the cargo handling machine drum;
The rope reciprocating feed screw is mounted so as to mesh with the rope reciprocating feed screw, and is configured to move in the longitudinal direction of the rope reciprocating feed screw as the rope reciprocating feed screw rotates. A block-shaped moving body having a rope guide for guiding the rope that has been taken out;
A rod-shaped guide shaft that is provided in parallel with the rope reciprocating feed screw and contacts the moving body to guide the moving body;
The cargo handling machine according to claim 5, wherein the guide shaft is configured to be rotatable. - 前記荷役機械用ドラムから巻き出されたロープの逆巻状態を検知するロープ逆巻検知機構を更に有し、
前記逆巻検知機構は、
前記荷役機械用ドラムから巻き出されたロープに接触するとともに、前記移動体に回転移動可能に取り付けられ、その回転移動によってリミットスイッチを動作させるリミットレバーユニットを有し、
当該リミットレバーユニットは、前記荷役機械用ドラムから巻き出されたロープの経路の変位に応じて回転移動することによって前記リミットスイッチを動作させるように構成されている請求項5又は6のいずれか1項記載の荷役機械。 A rope reverse winding detection mechanism for detecting a reverse winding state of the rope unwound from the cargo handling machine drum;
The reverse winding detection mechanism is
A limit lever unit that contacts the rope unwound from the drum for the cargo handling machine and is rotatably attached to the movable body, and operates a limit switch by the rotational movement;
The said limit lever unit is comprised so that the said limit switch may be operated by rotating according to the displacement of the path | route of the rope unwound from the said drum for cargo handling machines. The cargo handling machine described in the section. - 前記荷役機械用ドラムから巻き出されたロープの無負荷状態を検知する無負荷検知機構を更に有し、
前記無負荷検知機構は、
前記荷役機械用ドラムから巻き出されたロープに接触するとともに、前記移動体に回転移動可能に取り付けられ、その回転移動によってリミットスイッチを動作させる無負荷検知レバーユニットを有し、
当該無負荷検知レバーユニットは、前記荷役機械用ドラムから巻き出されたロープの張力の変化に応じて回転移動することによって前記リミットスイッチを動作させるように構成されている請求項5乃至7のいずれか1項記載の荷役機械。 Further comprising a no-load detection mechanism for detecting an unloaded state of the rope unwound from the drum for the cargo handling machine;
The no-load detection mechanism is
A load detecting lever unit that contacts the rope unwound from the drum for the cargo handling machine and is rotatably attached to the movable body, and operates a limit switch by the rotational movement;
The non-load detection lever unit is configured to operate the limit switch by rotating in accordance with a change in tension of a rope unwound from the drum for cargo handling machinery. The cargo handling machine according to claim 1. - 前記荷役機械用ドラムに巻き付けられたロープを押えるロープ押え機構を更に有し、
前記ロープ押え機構は、
前記荷役機械用ドラムのドラム本体部の中央部分に巻き付けられたロープに対して接触して押圧する一方で、前記荷役機械用ドラムのドラム本体部の両端部に巻き付けられたロープに対して接触しない形状に形成されたロープ押えローラを有する請求項5乃至8のいずれか1項記載の荷役機械。 A rope presser mechanism for pressing a rope wound around the drum for the cargo handling machine;
The rope presser mechanism is
While contacting and pressing against the rope wound around the central portion of the drum body of the cargo handling machine drum, it does not contact with the rope wound around both ends of the drum body of the cargo handling machine drum The cargo handling machine according to any one of claims 5 to 8, further comprising a rope presser roller formed in a shape. - 前記ドラム駆動機構は、DC又はAC方式のモータを有するとともに、
前記制御部は、前記モータの加速時間及び減速時間の設定する回転制御部と、当該回転制御部において設定された加減速信号に基づいて前記モータのソフト加速波形とソフト減速波形を決定する加減速波形制御部と、当該加減速波形制御部からの駆動波形信号に基づいてPWM波形を生成するPWM生成部とを有し、
前記荷役機械用ドラムの巻下げの際に、前記回転制御部、前記加減速波形制御部及び前記PWM生成部を用いたPWM制御によって前記モータを駆動させるように構成されている請求項5乃至9のいずれか1項記載の荷役機械。 The drum drive mechanism has a DC or AC motor,
The control unit determines a soft acceleration waveform and a soft deceleration waveform of the motor based on a rotation control unit that sets acceleration time and deceleration time of the motor, and an acceleration / deceleration signal set in the rotation control unit. A waveform control unit, and a PWM generation unit that generates a PWM waveform based on a drive waveform signal from the acceleration / deceleration waveform control unit,
10. The motor is configured to be driven by PWM control using the rotation control unit, the acceleration / deceleration waveform control unit, and the PWM generation unit when the cargo handling machine drum is lowered. The cargo handling machine according to any one of the above.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2014/066771 WO2015198413A1 (en) | 2014-06-25 | 2014-06-25 | Drum for load handling machine, and load handling machine |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/JP2014/066771 WO2015198413A1 (en) | 2014-06-25 | 2014-06-25 | Drum for load handling machine, and load handling machine |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2015198413A1 true WO2015198413A1 (en) | 2015-12-30 |
Family
ID=54937548
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2014/066771 WO2015198413A1 (en) | 2014-06-25 | 2014-06-25 | Drum for load handling machine, and load handling machine |
Country Status (1)
| Country | Link |
|---|---|
| WO (1) | WO2015198413A1 (en) |
Cited By (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111302251A (en) * | 2019-12-27 | 2020-06-19 | 上海宜亮电子科技有限公司 | Winding drum |
| CN112362212A (en) * | 2020-11-12 | 2021-02-12 | 常州路航轨道装备有限公司 | Pantograph static tension detector and pantograph static tension detection control method |
| CN113788421A (en) * | 2021-09-10 | 2021-12-14 | 河南东起机械有限公司 | Fixed-point limiting fold line lifting mechanism of electric hoist |
| JP7046406B1 (en) * | 2021-12-07 | 2022-04-04 | 合同会社森林システム研究所 | Harvester and rope winder for harvester |
| CN117878523A (en) * | 2023-04-27 | 2024-04-12 | 广东宝路盛精密机械有限公司 | Battery diaphragm production line |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS53113223U (en) * | 1977-01-20 | 1978-09-09 | ||
| JPS5563383U (en) * | 1978-10-26 | 1980-04-30 | ||
| JPS58166590U (en) * | 1982-04-30 | 1983-11-07 | リョービ株式会社 | Reverse winding prevention device in electric winch |
| JPS6145889A (en) * | 1984-08-03 | 1986-03-05 | 三菱重工業株式会社 | Winch device |
| JPS63152111U (en) * | 1987-03-27 | 1988-10-06 | ||
| JPH0233626B2 (en) * | 1986-07-28 | 1990-07-30 | Fujikura Ltd | NIZUKURYODORAMUNIOKERUTORORISENNOTANMATSUKOTEIHOHO |
| JPH0727019U (en) * | 1993-10-22 | 1995-05-19 | 松下電工株式会社 | lift device |
-
2014
- 2014-06-25 WO PCT/JP2014/066771 patent/WO2015198413A1/en active Application Filing
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPS53113223U (en) * | 1977-01-20 | 1978-09-09 | ||
| JPS5563383U (en) * | 1978-10-26 | 1980-04-30 | ||
| JPS58166590U (en) * | 1982-04-30 | 1983-11-07 | リョービ株式会社 | Reverse winding prevention device in electric winch |
| JPS6145889A (en) * | 1984-08-03 | 1986-03-05 | 三菱重工業株式会社 | Winch device |
| JPH0233626B2 (en) * | 1986-07-28 | 1990-07-30 | Fujikura Ltd | NIZUKURYODORAMUNIOKERUTORORISENNOTANMATSUKOTEIHOHO |
| JPS63152111U (en) * | 1987-03-27 | 1988-10-06 | ||
| JPH0727019U (en) * | 1993-10-22 | 1995-05-19 | 松下電工株式会社 | lift device |
Cited By (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN111302251A (en) * | 2019-12-27 | 2020-06-19 | 上海宜亮电子科技有限公司 | Winding drum |
| CN112362212A (en) * | 2020-11-12 | 2021-02-12 | 常州路航轨道装备有限公司 | Pantograph static tension detector and pantograph static tension detection control method |
| CN112362212B (en) * | 2020-11-12 | 2022-05-06 | 常州路航轨道装备有限公司 | Pantograph static tension detector and pantograph static tension detection control method |
| CN113788421A (en) * | 2021-09-10 | 2021-12-14 | 河南东起机械有限公司 | Fixed-point limiting fold line lifting mechanism of electric hoist |
| JP7046406B1 (en) * | 2021-12-07 | 2022-04-04 | 合同会社森林システム研究所 | Harvester and rope winder for harvester |
| WO2023105900A1 (en) * | 2021-12-07 | 2023-06-15 | 合同会社森林システム研究所 | Yarder and rope winding device for yarder |
| CN117878523A (en) * | 2023-04-27 | 2024-04-12 | 广东宝路盛精密机械有限公司 | Battery diaphragm production line |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2015198413A1 (en) | Drum for load handling machine, and load handling machine | |
| CN104976322B (en) | Sheave allowing rope deflection | |
| EP2694427B1 (en) | Tensioning device | |
| JP5424916B2 (en) | Rope hoist | |
| US8814143B2 (en) | Inclined drum arrangement for winch apparatus | |
| US11247880B2 (en) | Winch drum and crane provided therewith | |
| EP2986550B1 (en) | Load bearing apparatus and method | |
| CN103261739A (en) | Apparatus for guiding a flexible member | |
| AU2008293102B2 (en) | Axial displacement device, line deployment system, and a method for deploying a line | |
| RU2590791C2 (en) | Drive for at least one traction means | |
| JP5057758B2 (en) | Uncoiler for wire reeling equipment | |
| ITRA20120027A1 (en) | INDUSTRIAL EQUIPMENT | |
| KR20160096619A (en) | Hoisting system with increased available traction | |
| JP2003012279A (en) | Random winding preventive device of winding drum | |
| CN110642126B (en) | Elevator system adopting steel wire rope winding and unwinding device | |
| JP2008189451A (en) | Winch | |
| WO2016096726A1 (en) | Pulley for elevators | |
| US11780713B2 (en) | Rope guiding device and a method for guiding a rope | |
| JP2014037302A (en) | Elevator | |
| JP6097726B2 (en) | Support device | |
| JP2006282309A (en) | Method and device for detecting sheave abrasion quantity in elevator device, and control method and device for elevator device | |
| JP2008138389A (en) | Accumulator of wire reeling equipment | |
| JP2019202840A (en) | Rope winding device | |
| US9884748B2 (en) | Elevator system | |
| JP4742015B2 (en) | Tensioning device for wire reeling equipment |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 14895492 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| NENP | Non-entry into the national phase |
Ref country code: JP |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 14895492 Country of ref document: EP Kind code of ref document: A1 |