WO2015067208A1 - 检查方法和设备 - Google Patents
检查方法和设备 Download PDFInfo
- Publication number
- WO2015067208A1 WO2015067208A1 PCT/CN2014/090563 CN2014090563W WO2015067208A1 WO 2015067208 A1 WO2015067208 A1 WO 2015067208A1 CN 2014090563 W CN2014090563 W CN 2014090563W WO 2015067208 A1 WO2015067208 A1 WO 2015067208A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- cigarette
- image
- interest
- region
- model
- Prior art date
Links
- 238000001514 detection method Methods 0.000 title claims abstract description 55
- 235000019504 cigarettes Nutrition 0.000 claims abstract description 180
- 238000000034 method Methods 0.000 claims abstract description 68
- 238000012545 processing Methods 0.000 claims abstract description 14
- 238000000605 extraction Methods 0.000 claims description 25
- 238000007689 inspection Methods 0.000 claims description 25
- 230000008569 process Effects 0.000 claims description 22
- 238000012549 training Methods 0.000 claims description 11
- 238000002372 labelling Methods 0.000 claims description 6
- 238000010606 normalization Methods 0.000 claims description 4
- 238000002601 radiography Methods 0.000 claims description 4
- 238000011156 evaluation Methods 0.000 abstract 1
- 238000004422 calculation algorithm Methods 0.000 description 34
- 238000004806 packaging method and process Methods 0.000 description 8
- 238000011160 research Methods 0.000 description 7
- 230000006870 function Effects 0.000 description 6
- 230000005855 radiation Effects 0.000 description 6
- 238000012360 testing method Methods 0.000 description 6
- 230000005540 biological transmission Effects 0.000 description 5
- 230000000694 effects Effects 0.000 description 5
- 238000003384 imaging method Methods 0.000 description 5
- 238000004458 analytical method Methods 0.000 description 4
- 238000003909 pattern recognition Methods 0.000 description 4
- 238000004364 calculation method Methods 0.000 description 3
- 238000004891 communication Methods 0.000 description 3
- 238000010586 diagram Methods 0.000 description 3
- 230000008859 change Effects 0.000 description 2
- 238000002591 computed tomography Methods 0.000 description 2
- 238000013135 deep learning Methods 0.000 description 2
- 238000011161 development Methods 0.000 description 2
- 230000018109 developmental process Effects 0.000 description 2
- 239000003814 drug Substances 0.000 description 2
- 229940079593 drug Drugs 0.000 description 2
- 238000001914 filtration Methods 0.000 description 2
- 230000007246 mechanism Effects 0.000 description 2
- 238000011897 real-time detection Methods 0.000 description 2
- 230000004044 response Effects 0.000 description 2
- 230000000391 smoking effect Effects 0.000 description 2
- 238000013528 artificial neural network Methods 0.000 description 1
- 230000000052 comparative effect Effects 0.000 description 1
- 238000004590 computer program Methods 0.000 description 1
- 238000012790 confirmation Methods 0.000 description 1
- 238000013461 design Methods 0.000 description 1
- 239000002360 explosive Substances 0.000 description 1
- 239000000835 fiber Substances 0.000 description 1
- 230000036541 health Effects 0.000 description 1
- 238000003709 image segmentation Methods 0.000 description 1
- 238000010801 machine learning Methods 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 230000015654 memory Effects 0.000 description 1
- 238000012986 modification Methods 0.000 description 1
- 230000004048 modification Effects 0.000 description 1
- 238000007637 random forest analysis Methods 0.000 description 1
- 238000005070 sampling Methods 0.000 description 1
- 238000012216 screening Methods 0.000 description 1
- 238000011895 specific detection Methods 0.000 description 1
- 238000006467 substitution reaction Methods 0.000 description 1
- 238000012706 support-vector machine Methods 0.000 description 1
Images









Classifications
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F18/00—Pattern recognition
- G06F18/20—Analysing
- G06F18/24—Classification techniques
- G06F18/241—Classification techniques relating to the classification model, e.g. parametric or non-parametric approaches
- G06F18/2413—Classification techniques relating to the classification model, e.g. parametric or non-parametric approaches based on distances to training or reference patterns
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F18/00—Pattern recognition
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06F—ELECTRIC DIGITAL DATA PROCESSING
- G06F18/00—Pattern recognition
- G06F18/20—Analysing
- G06F18/24—Classification techniques
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V20/00—Scenes; Scene-specific elements
- G06V20/50—Context or environment of the image
- G06V20/52—Surveillance or monitoring of activities, e.g. for recognising suspicious objects
-
- G—PHYSICS
- G06—COMPUTING; CALCULATING OR COUNTING
- G06V—IMAGE OR VIDEO RECOGNITION OR UNDERSTANDING
- G06V2201/00—Indexing scheme relating to image or video recognition or understanding
- G06V2201/05—Recognition of patterns representing particular kinds of hidden objects, e.g. weapons, explosives, drugs
Definitions
- Embodiments of the present invention relate to automatic detection of suspects in radiation images, and more particularly to methods of inspecting cigarettes and corresponding security inspection devices in large container scanning systems.
- Cigarette smuggling is considered to be the second largest smuggling activity in the world after drugs. For more than a decade, although countries have actively participated in combating cigarette smuggling, the number of smuggled cigarettes is still growing. In 1996, smuggled cigarettes accounted for 6.5% of total cigarette sales. In 2009, this figure increased to 11.6%, reaching 675 billion, causing $400 billion in losses to governments. In addition, the harm of cigarette smuggling is not only reflected in threatening human health, causing government tax losses, but also becoming a source of funds for criminal organizations and terrorist organizations, and even providing funding for drug smuggling. The EU even declared: "All international criminal organizations are suspected of involvement in cigarette smuggling." The danger of cigarette smuggling is increasing, reflecting that the relevant testing methods are not in place, giving criminals a chance.
- Object detection is a hot issue in the field of computer vision and pattern recognition.
- image retrieval there are many research results that can be used for reference.
- the Oriented Gradients feature, the DPM-Deformable Part-based Model algorithm, and the Deep Learning method have led to a significant increase in object detection.
- the invention draws on relevant research and conducts targeted research on the cigarette model in the radiation image, and obtains better results.
- the embodiment of the present invention draws on the research of automatic object detection based on the container DR image, and proposes a new automatic cigarette smuggling detection method.
- the purpose is to automatically detect whether there is a cigarette in the image by using an algorithm by means of radiographic scanning in the process of container inspection. If a cigarette is present, the position of the cigarette in the image is given, thereby assisting in manually determining whether there is a smuggling case.
- the performance of the algorithm is also a task that must be considered for the purpose of assisting labor.
- the detection algorithm must have a low false positive rate and a false negative rate, and must meet the requirements of real-time detection. Embodiments of the present invention have achieved good results by targeted research on cigarette patterns.
- the algorithm false positive rate is less than 0.5%, the false negative rate is less than 10%, and the calculation is completed within 1 second, which satisfies the above application requirements.
- the algorithm may also preferably have a self-learning function.
- the algorithm can self-learn images that are confirmed as cigarettes but cannot be detected, and meet the detection requirements of changes in cigarette patterns when cigarette packages are changed.
- the confirmation mechanism includes manually inputting a cigarette image and automatically acquiring a cigarette image through a customs declaration or the like.
- a method of automatically detecting a cigarette in a container security perspective image comprising the steps of: obtaining a perspective image of the object to be inspected; processing the perspective image to obtain a region of interest; The region of interest is automatically detected using a cigarette model to determine if the region of interest of the fluoroscopic image belongs to a cigarette.
- the image resolution does not need to be too high in order to achieve detection under real-time conditions.
- a large number of cigarettes have a striped texture in the image.
- This characteristic reflects the packaging of the cigarette rather than the cigarette itself.
- the root cause of this feature is that in order to reduce the harm of smoking and prevent personal packaging from attracting young people, cigarette packages in various countries tend to be homogenized, which provides conditions for effective testing.
- the present invention utilizes the above features and accurately and quickly identifies cigarettes in the container security perspective image through steps of image acquisition, region of interest acquisition, cigarette model establishment, and automatic detection.
- the method before the step of automatically detecting the region of interest using the cigarette model, the method further includes the step of establishing a cigarette model, the step of establishing the cigarette model comprising: establishing a library of cigarette images; The middle images are processed to obtain respective regions of interest;
- Feature extraction is performed on the region of interest of the image in the cigarette image library; the cigarette model is generated based on the extracted feature training classifier.
- the step of establishing a library of cigarette images comprises: scanning a plurality of cigarette images in different shapes in the container, obtaining a positive sample library of the cigarette model; and collecting objects similar to cigarettes and random objects The image forms a negative sample library of cigarette models, each of the negative sample libraries containing no cigarettes.
- the scanned images of the various regular stacks of cigarettes are divided into a plurality of modes of different widths from which a positive sample bank of the cigarette model is generated.
- the step of performing feature extraction on the region of interest of the image in the library of cigarette images comprises: manually marking the position of the cigarette in units of boxes, forming a positive sample feature set in the plurality of modes; Multiple samples are randomly selected from the sample library to perform feature extraction to form a negative sample feature set.
- the step of training the classifier based on the extracted features comprises: (1) training the classifier under given conditions of the positive and negative sample feature sets; (2) classifying the positive and negative samples with the classifier; 3) According to the confidence of the result, remove the easily-divided negative samples and re-add enough random negative samples; (4) repeat the above steps (1), (2), and (3) until the classification results of the classifier change enough. Small, or until enough iterations are reached.
- the method further comprises, for the image of the undetected cigarette, automatically analyzing the image by manual labeling or customs declaration to obtain a new cigarette image and update the cigarette model
- the cigarette image may exhibit a large difference with respect to the established model.
- the method further includes a self-learning function. By continuously updating the cigarette model, the method is able to adapt to different detection environments, scanning devices and more packaging forms of cigarettes.
- the image size is scaled to a uniform resolution, and the grayscale stretching is performed to fill the image value range with the entire possible range of values. Perform normalization.
- the air portion of the fluoroscopic image is excluded to prevent air noise from producing a detection result.
- the fluoroscopic image in the step of processing the fluoroscopic image to obtain a region of interest, using the method of air luminance threshold, the fluoroscopic image is binarized with an air value, and only the image portion below the threshold is performed. Cigarette testing.
- the step of automatically detecting the region of interest using the cigarette model comprises: normalizing and acquiring the region of interest, generating an HOG feature of the region of interest, given a image to be detected; using a sliding window Traversing, seeking its maximum confidence in each window in multiple modes; and the location of the cigarette at a confidence greater than a certain threshold.
- the cigarette is detected on a plurality of scales.
- An embodiment of the present invention further provides an inspection apparatus including: a digital radiography apparatus that performs radiographic inspection on an object to be inspected to acquire a perspective image of an object to be inspected; and an image processing apparatus that processes the perspective image to obtain a feeling The region of interest, and the region of interest is automatically detected using a cigarette model to determine if the region of interest of the fluoroscopic image belongs to a cigarette.
- an inspection apparatus including: a digital radiography apparatus that performs radiographic inspection on an object to be inspected to acquire a perspective image of an object to be inspected; and an image processing apparatus that processes the perspective image to obtain a feeling The region of interest, and the region of interest is automatically detected using a cigarette model to determine if the region of interest of the fluoroscopic image belongs to a cigarette.
- the device is for automatically detecting cigarette smuggling.
- the embodiment of the invention performs cigarette detection on the scanned image of the cargo, especially the container, which can avoid the problem that the traditional method of detecting the loophole and the manual judgment effect is poor, and is important for combating cigarettes.
- the invention firstly proposes a technical solution for automatically judging cigarette smuggling by a detection algorithm in the prior art, and has been verified by practice, has excellent performance, and has strong practicability.
- FIG. 1 is a schematic structural view of an inspection apparatus according to an embodiment of the present invention
- FIG. 2 is a block diagram showing the structure of an inspection apparatus according to an embodiment of the present invention.
- FIG. 3 shows a flow chart of a method of automatically detecting cigarettes in accordance with an embodiment of the present invention
- FIG. 4 shows a flow chart of establishing a cigarette model in accordance with an embodiment of the present invention
- Figure 5 shows six placements of cigarettes
- Figure 6 shows a schematic view of scanning cigarettes in a container
- Figure 7 shows three modes of cigarette images
- Figure 8 shows a flow chart of automatic detection in accordance with an embodiment of the present invention
- Figure 9 is a diagram showing the results of cigarette detection according to an embodiment of the present invention.
- Figure 10 shows a flow chart of a self-learning process in accordance with an embodiment of the present invention.
- an inspection method is proposed for the problem that the smuggling of cigarettes cannot be automatically checked in the prior art.
- a perspective image of the object to be inspected is first acquired.
- the fluoroscopic image is then processed to obtain a region of interest.
- the region of interest is automatically detected using a cigarette model to determine if the region of interest of the fluoroscopic image belongs to a cigarette.
- FIG. 1 is a schematic view of an inspection apparatus in accordance with one embodiment of the present invention.
- the radiation source 110 generates X-rays, which are collimated by the collimator 120 to perform a security check on the moving container truck 140, and the detector 150 receives the rays that penetrate the truck to obtain a transmission image.
- the transmission image is also processed by the image processing device 160 such as a computer to determine whether or not there is a cigarette. According to some embodiments, in the case of judging a cigarette, marking it on the image, or reminding the panelist that the container The truck carries cigarettes.
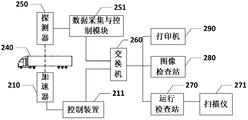
- FIG. 2 shows a deployment diagram of an inspection apparatus according to an embodiment of the present invention.
- the radiation source and detector 250 of the accelerator 210 are hardware devices
- the data acquisition and control module 251 is coupled to the detector 250 and controls the detector 250
- the control device 211 is coupled to the accelerator 210 and controls the accelerator 210. Bunch and stop.
- the image inspection station 280 and the workstation running the inspection station 270 for the scanning device are connected to the data acquisition and control module 251 via the switch 260 and communicated, and the image results can be printed by the printer 290.
- the scanner 271 is connected to the operation check station 270 for inputting other information such as customs declaration data. In other embodiments, other input devices such as a keyboard may be used to input information.
- the accelerator 210 produces X-rays that pass through the X-rays of the object under inspection 240 and are received by the detector 250 for transmission imaging of the object under inspection.
- the transmission image is processed by an image processing device such as a computer (for example, image inspection station 280) to determine whether or not a cigarette is present.
- an image processing device such as a computer (for example, image inspection station 280) to determine whether or not a cigarette is present.
- the image is marked or reminded to the panelist that the container truck carries the cigarette.
- step S301 a perspective image of the object to be inspected is acquired.
- step S302 the fluoroscopic image is processed to obtain a region of interest.
- step S303 the region of interest is detected using the cigarette model to determine whether the region of interest of the fluoroscopic image belongs to a cigarette.
- the step of automatically detecting includes image feature extraction, decision, and identification of suspect regions, and the like.
- Different scanning devices have different images depending on the energy/dose of the radiation source, so the images obtained are not the same.
- the image can first be normalized to reduce this difference.
- the container cabinet is large, so that the detection can be realized under real-time conditions, and the image resolution does not need to be too high.
- a 5mm/pixel image as an example, a large number of cigarettes have a striped texture in the image.
- This characteristic reflects the packaging of the cigarette rather than the cigarette itself.
- the root cause of this feature is that in order to reduce the harm of smoking and prevent personal packaging from attracting young people, cigarette packages in various countries tend to be homogenized, which provides conditions for effective testing. Therefore, without loss of generality, the image size can be scaled to a uniform resolution of, for example, about 5 mm/pixel, and grayscale stretching is performed to fill the image value range with the entire range of possible values, and the normalization operation is completed.
- the image pixel resolution exemplified above is 5 mm/pixel, however, those skilled in the art will understand that the above resolution is not the only option, and the above resolution can be appropriately modified for the actual size of the cigarette package.
- the air portion of the image is excluded prior to detection to avoid air noise producing a detection result.
- the image is binarized with an air value using a method of air brightness threshold.
- the brightness threshold of the air may be preset, and the area where the brightness exceeds the brightness threshold is considered to be the air area. Therefore, cigarette detection is performed only on the image portion below the threshold.
- Object detection mainly includes two types of methods based on sliding window and sub-region based (Sub Region).
- the former adopts traversal mode, and slides on various scales of the image in a fixed-size window to calculate whether each pixel is a target object on each scale; the latter adopts image segmentation and other methods to perform local features of non-fixed shapes in the image. Extraction and target detection.
- the sliding window method is much larger than the local area method, the accuracy is much higher. Therefore, in an embodiment of the invention, it is preferred to use a sliding window method.
- the step of establishing a cigarette model includes: step S401, establishing a cigarette image library acquisition; step S402, obtaining a region of interest, step S403, feature extraction and step S404, and training the classifier to generate a cigarette model.
- the cigarette model models the image pattern of cigarettes, so the extraction of image patterns is the focus of the algorithm.
- the packaging form, placement method, and quantity of cigarettes may cause differences in cigarette images.
- the convergence of the packaging form makes this problem simple, a small number of modes can generalize most of the situation; the difference in quantity will cause the image gray level and the stripe intensity to change, which needs to be overcome in the feature extraction algorithm; The impact is very large, and the inventors attribute it to three modes.
- the form of cigarette placement may be any of the six placements in Figure 5. Since the container scanning basically uses a fan beam (as shown in FIG.
- the lateral edges are three-dimensionally superimposed in the ray direction, so that the cigarettes exhibit vertical stripes of different widths.
- the vertical stripe texture of cigarettes can be summarized into the following three modes as shown in Fig. 7, namely: Fig. 5 (a) and (d) produce the wide stripe in Fig. 7 (a), Fig. 5 (b) and (e) produce a slightly narrower stripe in Fig. 7(b), while Figs. 5(c) and (f) produce a narrow stripe in Fig. 7(c).
- the inventors proposed three cigarette patterns in different placements and used algorithms to build models.
- the present invention subtly utilizes the characteristics of the above three modes, so that after the model is built, it can automatically train and/or learn without relying on the initial manual labeling, thereby greatly saving labor costs and improving detection efficiency and accuracy.
- Those skilled in the art will appreciate that in other embodiments, Use more placement to create other patterns.
- the model includes feature extraction algorithms and classifiers. According to the above analysis, the model is established as follows:
- the classifier can be optimized using existing algorithms in the field of machine learning and pattern recognition. For example, referring to the Boosting idea, the easy-sort samples are continuously discarded, new random samples are added, and the C and D steps are repeated until the error rate is low enough or the algorithm converges to obtain the classifier.
- the existing algorithm can be used to adjust the position of the positive sample to reduce the impact of manual labeling errors. For example, referring to the idea of the hidden variable model in DPM, it is assumed that the position of the manual label is not completely accurate. After the classifier is obtained in D, the position of the positive sample in A is offset, and the position of the positive sample in the sense of the classifier is obtained. The E step gets an optimized classifier.
- the creation of a cigarette model can be performed independently of the automatic detection of the cigarette, i.e., the automated cigarette detection of the fluoroscopic image can be performed using the established cigarette model after the cigarette model is established.
- Figure 6 shows the process of inspecting a cigarette, the cigarette moving relative to the source, producing a transmission image, and then performing an automatic detection.
- the automatic detection process is actually a subset of the model establishment process: as shown in Fig. 8, in step S801, the image to be inspected is input. At step S802, feature extraction is performed on the image to be inspected. According to some embodiments, the image may also be processed during this process to obtain a region of interest.
- the pixel model is used to traverse the pixel points in each region of interest for the image to be tested, and the neighborhood image around the point is extracted and subjected to feature extraction and classification judgment to obtain whether the point is a cigarette region, and Confidence in conclusion.
- step S804 it is determined whether or not there is a cigarette. If so, in step S805, after obtaining the result of whether each pixel is a suspected area of the cigarette, the cigarette area is obtained by extracting through the connected area. Otherwise, in step S806, "undetected" is output or the image to be detected is discarded.
- Fig. 9 is a view showing the detection of a cigarette in the form of a rectangular frame.
- the algorithm has a self-learning function that enables it to adapt to different detection environments, scanning devices and more packaging forms of cigarettes.
- the algorithm used for self-learning is basically the same as the model. The difference is that it only gets positive samples during the detection process (as shown in Figure 10).
- FIG. 10 shows a flow chart of a self-learning process in accordance with an embodiment of the present invention.
- step S1001 an image to be inspected is input.
- step S1002 feature extraction is performed on the image to be inspected.
- the image may also be processed during this process to obtain a region of interest.
- step S1003 the inspection is performed using the cigarette model.
- step S1004 it is determined whether or not there is a cigarette. If so, in step S1005, after obtaining the result of whether each pixel is a suspected area of the cigarette, the cigarette area is obtained by extracting through the connected area.
- step S1006 if the manual discovery algorithm does not detect the cigarette and is marked in the detection process, the algorithm adds the marked area to the positive sample, and performs training or incremental learning in step S1007 to obtain the updated model. However, if the resulting model still cannot detect the sample that was just added, the update is discarded.
- HOG HOG
- DPM Deep Learning
- Deep Learning can be directly applied to the present invention
- the detection function can be realized by extracting and classifying the positive and negative sample features.
- various gradient-based descriptors, texture descriptors, and the like such as HOG, local binary pattern (LBP-Local Binary Pattern), and maximum response set (Maximum Response Sets) may be used.
- MR8 in addition to the BOW-Bag of Words, texture representation (Texton), sparse representation (Sparse Representation), etc. for structured feature processing; in the classifier, you can use a variety of linear, nonlinear, Integrated classifiers, neural networks, such as Fisher classifiers, support vector machines, Boosting, random forests, multi-layer perceptrons, etc.
- the algorithm of the present invention is generally applicable to all types of large cargo/container scanning equipment.
- the image needs to be normalized when the image is acquired.
- the original two-dimensional image signal be X, according to the physical parameters of the scanning device, zoom the X resolution to 5mm/pixel, and perform grayscale stretching to obtain a normalized image.
- a pixel larger than the threshold t a is considered to be air and no detection calculation is performed.
- the number of images is about 100, which can meet the practical requirements.
- a similar object and a random object are collected to form a negative sample library ⁇ Y ⁇ , and each image in the negative sample library ⁇ Y ⁇ does not contain a cigarette.
- the embodiment employs the HOG feature.
- Classifier C is used to classify positive and negative samples. According to the confidence of the results, the negative samples that are easy to divide are removed, and enough random negative samples are added again. Then, repeat steps D) and E) until the classifier changes are small enough, or enough iterations are reached.
- step B) brings a large error, making the relative position of the cigarette stripes unclear.
- a classifier C for surrounding the image I ij B) is detected, to find the best position I ij will update I ij I ij ', and then iteratively C) to F) a step Until the classifier changes small enough, or enough iterations are reached.
- the HOG feature H of the ROI region is generated by normalization and ROI extraction. Use the sliding window to traverse H and find its maximum confidence in each of the three modes. The location of the cigarette is the confidence level above a certain threshold.
- cigarette detection can be performed on multiple scales (ie, different scales). For example, the detection of the fluoroscopic image on the three scales of [0.9, 1.0, 1.1] can better solve the problem of a certain deflection when the cigarette is placed.
- the detection result can be post-processed to remove noise. For example, median filtering is performed on the above confidence map, or the above-mentioned confidence map is binarized and connected area area filtering is performed.
- the self-learning process involves a model update strategy.
- the algorithm used for self-learning is basically the same as the model. The difference is that it only gets positive samples during the detection process (as shown in Figure 10).
- the algorithm adds the marked area to the positive sample, re-trains or incrementally learns, and obtains the updated model. However, if the resulting model still cannot detect the sample that was just added, the update is discarded.
- aspects of the embodiments disclosed herein may be implemented in an integrated circuit as a whole or in part, as one or more of one or more computers running on one or more computers.
- a computer program eg, implemented as one or more programs running on one or more computer systems
- implemented as one or more programs running on one or more processors eg, implemented as one or One or more programs running on a plurality of microprocessors, implemented as firmware, or substantially in any combination of the above, and those skilled in the art, in accordance with the present disclosure, will be provided with design circuitry and/or write software and / or firmware code capabilities.
- signal bearing media include, but are not limited to, recordable media such as floppy disks, hard drives, compact disks (CDs), digital versatile disks (DVDs), digital tapes, computer memories, and the like; and transmission-type media such as digital and / or analog communication media (eg, fiber optic cable, waveguide, wired communication link, wireless communication link, etc.).
Abstract
Description
Claims (14)
- 一种检查方法,包括以下步骤:获取被检查物体的透视图像;对所述透视图像进行处理得到感兴趣区域;以及利用香烟模型对感兴趣区域进行自动检测,以确定所述透视图像的感兴趣区域是否属于香烟。
- 根据权利要求1所述的方法,其中在所述利用香烟模型对感兴趣区域进行自动检测的步骤之前,还包括建立香烟模型的步骤,所述建立香烟模型的步骤包括:建立香烟图像库;对所述香烟图像库中图像进行处理得到各自的感兴趣区域;对所述香烟图像库中图像的感兴趣区域进行特征提取;基于提取的特征训练分类器,生成所述香烟模型。
- 根据权利要求2所述的方法,其中所述建立香烟图像库的步骤包括:扫描在集装箱中各个摆放形式、不同数量下的香烟图像,得到香烟模型的正样本库;以及采集与香烟类似的物体和随机物体的图像,形成香烟模型的负样本库,所述负样本库中每幅图像均不包含香烟。
- 根据权利要求2或3所述的方法,其中在所述建立香烟模型的步骤中,香烟的各种规则堆叠的扫描图像被划分为宽度不同的多种模式,由所述多种模式生成所述香烟模型的正样本库。
- 根据权利要求4所述的方法,其中对所述香烟图像库中图像的感兴趣区域进行特征提取的步骤包括:以箱为单位,人工标注香烟位置,形成所述多种模式下的正样本特征集;以及在负样本库中随机抽取多个样本,进行特征提取,形成负样本特征集。
- 根据权利要求2所述的方法,其中基于提取的特征训练分类器的步骤包括:(1)在给定正、负样本特征集的条件下,训练分类器;(2)用分类器对正、负样本分类;(3)根据结果置信度,将易分的负样本去掉,重新加入足够的随机负样本;(4)重复上述步骤(1)、(2)、和(3),直到分类器的分类结果变化足够小,或达到足够迭代次数为止。
- 根据权利要求1或2所述的方法,其中所述方法还包括对于未检测到香烟的图像,通过人工标注或报关单自动分析,得到新的香烟图像并更新香烟模型。
- 根据权利要求1或2所述的方法,其中在所述获取被检查物体的透视图像的步骤中,将图像尺寸缩放到均一的分辨率下,并进行灰度拉伸,使图像值域充满整个可能的取值范围,来进行归一化操作。
- 根据权利要求1或2所述的方法,其中在所述对所述透视图像进行处理得到感兴趣区域的步骤中,把所述透视图像中空气部分排除掉,以避免空气噪声产生检测结果。
- 根据权利要求9所述的方法,其中在对所述透视图像进行处理得到感兴趣区域的步骤中,采用空气亮度阈值的方法,用空气值对所述透视图像进行二值化,只对阈值之下的图像部分进行香烟检测。
- 根据权利要求1或2所述的方法,其中在所述利用香烟模型对感兴趣区域进行自动检测的步骤包括:给定要检测的图像,经过归一化和获取感兴趣区域,生成感兴趣区域的HOG特征;用滑动窗口遍历,求它在多种模式下,每个窗口中的最大置信度;以及置信度大于特定阈值处即为香烟位置。
- 根据权利要求1或2所述的方法,其中在多个尺度上检测香烟。
- 一种检查设备,包括:数字放射摄影装置,对被检查物体进行射线检查,获取被检查物体的透视图像;以及图像处理装置,对所述透视图像进行处理得到感兴趣区域,并利用香烟模型对感兴趣区域进行自动检测,以确定所述透视图像的感兴趣区域是否属于香烟。
- 根据权利要求13所述的设备,其用于自动检测香烟走私。
Priority Applications (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2016528054A JP6246355B2 (ja) | 2013-11-07 | 2014-11-07 | 検出方法及びその機器 |
| EP14860336.8A EP3067823A4 (en) | 2013-11-07 | 2014-11-07 | Detection method and device |
| KR1020187008606A KR20180035930A (ko) | 2013-11-07 | 2014-11-07 | 검출 방법 및 그 설비 |
| US15/034,021 US10013615B2 (en) | 2013-11-07 | 2014-11-07 | Inspection methods and devices |
| KR1020167015104A KR20160083099A (ko) | 2013-11-07 | 2014-11-07 | 검출 방법 및 그 설비 |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201310546289.2A CN104636707B (zh) | 2013-11-07 | 2013-11-07 | 自动检测香烟的方法 |
| CN201310546289.2 | 2013-11-07 |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2015067208A1 true WO2015067208A1 (zh) | 2015-05-14 |
Family
ID=53040922
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/CN2014/090563 WO2015067208A1 (zh) | 2013-11-07 | 2014-11-07 | 检查方法和设备 |
Country Status (7)
| Country | Link |
|---|---|
| US (1) | US10013615B2 (zh) |
| EP (1) | EP3067823A4 (zh) |
| JP (1) | JP6246355B2 (zh) |
| KR (2) | KR20180035930A (zh) |
| CN (1) | CN104636707B (zh) |
| CL (1) | CL2016000960A1 (zh) |
| WO (1) | WO2015067208A1 (zh) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115601631A (zh) * | 2022-12-15 | 2023-01-13 | 深圳爱莫科技有限公司(Cn) | 一种卷烟陈列图像识别方法、模型、设备及储存介质 |
| CN116052062A (zh) * | 2023-03-07 | 2023-05-02 | 深圳爱莫科技有限公司 | 一种鲁棒的烟草陈列图像处理方法和装置 |
Families Citing this family (23)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US10282623B1 (en) * | 2015-09-25 | 2019-05-07 | Apple Inc. | Depth perception sensor data processing |
| CN108108744B (zh) * | 2016-11-25 | 2021-03-02 | 同方威视技术股份有限公司 | 用于辐射图像辅助分析的方法及其系统 |
| US10268924B2 (en) | 2016-12-05 | 2019-04-23 | Sap Se | Systems and methods for integrated cargo inspection |
| CN108303435B (zh) * | 2017-01-12 | 2020-09-11 | 同方威视技术股份有限公司 | 检查设备和对集装箱进行检查的方法 |
| CN108303747B (zh) * | 2017-01-12 | 2023-03-07 | 清华大学 | 检查设备和检测枪支的方法 |
| CN107392931A (zh) * | 2017-08-08 | 2017-11-24 | 南京敏光视觉智能科技有限公司 | 条烟品牌分类装置及方法 |
| US11058143B2 (en) * | 2017-10-19 | 2021-07-13 | R.J. Reynolds Tobacco Company | Smoking-related article inspection systems and associated methods |
| PL3476228T3 (pl) | 2017-10-25 | 2020-11-16 | International Tobacco Machinery Poland Sp. Z O.O. | Sposób i urządzenie do napełniania pojemników transportowych artykułami prętopodobnymi przemysłu tytoniowego |
| KR101930062B1 (ko) * | 2017-12-27 | 2019-03-14 | 클리어라인 주식회사 | 인공지능기술을 이용한 단계별 자동 교정 시스템 |
| JP6863326B2 (ja) * | 2018-03-29 | 2021-04-21 | 日本電気株式会社 | 選別支援装置、選別支援システム、選別支援方法及びプログラム |
| CN108596820B (zh) * | 2018-04-11 | 2022-04-05 | 重庆第二师范学院 | 一种基于信息安全的图像处理系统 |
| CN109410190B (zh) * | 2018-10-15 | 2022-04-29 | 广东电网有限责任公司 | 基于高分辨率遥感卫星影像的杆塔倒断检测模型训练方法 |
| CN109446961B (zh) * | 2018-10-19 | 2020-10-30 | 北京达佳互联信息技术有限公司 | 姿势检测方法、装置、设备及存储介质 |
| CN109829466A (zh) * | 2019-01-23 | 2019-05-31 | 中国建筑第八工程局有限公司 | 一种基于机器视觉的吸烟行为人工智能检测方法 |
| CN110837856B (zh) * | 2019-10-31 | 2023-05-30 | 深圳市商汤科技有限公司 | 神经网络训练及目标检测方法、装置、设备和存储介质 |
| CN112633274A (zh) * | 2020-12-21 | 2021-04-09 | 中国航天空气动力技术研究院 | 一种声呐图像目标检测方法、装置、电子设备 |
| CN112819001B (zh) * | 2021-03-05 | 2024-02-23 | 浙江中烟工业有限责任公司 | 基于深度学习的复杂场景卷烟烟包识别方法和装置 |
| US20230012871A1 (en) * | 2021-07-07 | 2023-01-19 | Nanyang Technological University | Methods and Systems for Watermarking Neural Networks |
| IT202100023954A1 (it) * | 2021-09-17 | 2023-03-17 | Gd Spa | Apparato assemblatore e metodo di assemblaggio per produrre articoli da fumo multicomponente. |
| IT202100023942A1 (it) * | 2021-09-17 | 2023-03-17 | Gd Spa | Metodo e sistema per ispezionare articoli da fumo |
| IL290416A (en) * | 2022-02-07 | 2023-09-01 | Seetrue Screening Ltd | Identifying prohibited material hidden in an item using image processing |
| CN114792369B (zh) * | 2022-06-29 | 2022-09-23 | 上海启迪睿视智能科技有限公司 | 基于光投影的烟条盒填充状态检测方法及系统 |
| CN115205432B (zh) * | 2022-09-03 | 2022-11-29 | 深圳爱莫科技有限公司 | 一种香烟终端陈列样本图像自动生成的仿真方法与模型 |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2000011456A1 (en) * | 1998-08-20 | 2000-03-02 | Csir | Inspection of containers |
| CN1301960A (zh) * | 1999-12-29 | 2001-07-04 | 李广寅 | 集装箱中卷烟探测成像装置 |
| US7706502B2 (en) * | 2007-05-31 | 2010-04-27 | Morpho Detection, Inc. | Cargo container inspection system and apparatus |
| CN102483803A (zh) * | 2009-05-26 | 2012-05-30 | 拉皮斯坎系统股份有限公司 | 识别特定目标物品的x 射线断层摄影检查系统 |
Family Cites Families (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6195444B1 (en) | 1999-01-12 | 2001-02-27 | Analogic Corporation | Apparatus and method for detecting concealed objects in computed tomography data |
| GB0128659D0 (en) * | 2001-11-30 | 2002-01-23 | Qinetiq Ltd | Imaging system and method |
| US8223919B2 (en) * | 2003-04-25 | 2012-07-17 | Rapiscan Systems, Inc. | X-ray tomographic inspection systems for the identification of specific target items |
| US7596247B2 (en) | 2003-11-14 | 2009-09-29 | Fujifilm Corporation | Method and apparatus for object recognition using probability models |
| KR100695136B1 (ko) | 2005-01-04 | 2007-03-14 | 삼성전자주식회사 | 영상의 얼굴검출장치 및 방법 |
| CA2608119A1 (en) * | 2005-05-11 | 2006-11-16 | Optosecurity Inc. | Method and system for screening luggage items, cargo containers or persons |
| US7483511B2 (en) * | 2006-06-06 | 2009-01-27 | Ge Homeland Protection, Inc. | Inspection system and method |
| JP4818997B2 (ja) | 2007-06-29 | 2011-11-16 | オリンパス株式会社 | 顔検出装置及び顔検出プログラム |
| CN101403711B (zh) | 2007-10-05 | 2013-06-19 | 清华大学 | 液态物品检查方法和设备 |
| JP5444718B2 (ja) * | 2009-01-08 | 2014-03-19 | オムロン株式会社 | 検査方法、検査装置および検査用プログラム |
| JP5407774B2 (ja) * | 2009-11-10 | 2014-02-05 | 株式会社島津製作所 | 放射線撮影装置 |
| JP5707570B2 (ja) | 2010-03-16 | 2015-04-30 | パナソニックIpマネジメント株式会社 | 物体識別装置、物体識別方法、及び、物体識別装置の学習方法 |
| CN101853393B (zh) * | 2010-04-22 | 2013-02-13 | 深圳市鼎为科技有限公司 | 机器视觉系统检测算法的自动产生和自动学习方法 |
| CN102608673A (zh) * | 2012-02-29 | 2012-07-25 | 北京无线电计量测试研究所 | 人体安检系统可疑物品图像显示方法 |
| CN102608672A (zh) * | 2012-02-29 | 2012-07-25 | 北京无线电计量测试研究所 | 人体安检系统可疑物品图像显示装置 |
-
2013
- 2013-11-07 CN CN201310546289.2A patent/CN104636707B/zh active Active
-
2014
- 2014-11-07 WO PCT/CN2014/090563 patent/WO2015067208A1/zh active Application Filing
- 2014-11-07 EP EP14860336.8A patent/EP3067823A4/en not_active Ceased
- 2014-11-07 KR KR1020187008606A patent/KR20180035930A/ko not_active Application Discontinuation
- 2014-11-07 US US15/034,021 patent/US10013615B2/en active Active
- 2014-11-07 KR KR1020167015104A patent/KR20160083099A/ko active Search and Examination
- 2014-11-07 JP JP2016528054A patent/JP6246355B2/ja not_active Expired - Fee Related
-
2016
- 2016-04-21 CL CL2016000960A patent/CL2016000960A1/es unknown
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2000011456A1 (en) * | 1998-08-20 | 2000-03-02 | Csir | Inspection of containers |
| CN1301960A (zh) * | 1999-12-29 | 2001-07-04 | 李广寅 | 集装箱中卷烟探测成像装置 |
| US7706502B2 (en) * | 2007-05-31 | 2010-04-27 | Morpho Detection, Inc. | Cargo container inspection system and apparatus |
| CN102483803A (zh) * | 2009-05-26 | 2012-05-30 | 拉皮斯坎系统股份有限公司 | 识别特定目标物品的x 射线断层摄影检查系统 |
Non-Patent Citations (1)
| Title |
|---|
| See also references of EP3067823A4 * |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN115601631A (zh) * | 2022-12-15 | 2023-01-13 | 深圳爱莫科技有限公司(Cn) | 一种卷烟陈列图像识别方法、模型、设备及储存介质 |
| CN116052062A (zh) * | 2023-03-07 | 2023-05-02 | 深圳爱莫科技有限公司 | 一种鲁棒的烟草陈列图像处理方法和装置 |
Also Published As
| Publication number | Publication date |
|---|---|
| CL2016000960A1 (es) | 2016-10-28 |
| JP6246355B2 (ja) | 2017-12-13 |
| JP2016535888A (ja) | 2016-11-17 |
| US20160335503A1 (en) | 2016-11-17 |
| US10013615B2 (en) | 2018-07-03 |
| CN104636707A (zh) | 2015-05-20 |
| KR20160083099A (ko) | 2016-07-11 |
| EP3067823A4 (en) | 2017-06-14 |
| CN104636707B (zh) | 2018-03-23 |
| EP3067823A1 (en) | 2016-09-14 |
| KR20180035930A (ko) | 2018-04-06 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| WO2015067208A1 (zh) | 检查方法和设备 | |
| EP3349048B1 (en) | Inspection devices and methods for detecting a firearm in a luggage | |
| EP3349050B1 (en) | Inspection devices and methods for detecting a firearm | |
| Rogers et al. | Automated x-ray image analysis for cargo security: Critical review and future promise | |
| US10042079B2 (en) | Image-based object detection and feature extraction from a reconstructed charged particle image of a volume of interest | |
| US10509979B2 (en) | Inspection methods and systems | |
| Rogers et al. | A deep learning framework for the automated inspection of complex dual-energy x-ray cargo imagery | |
| Jaccard et al. | Tackling the X-ray cargo inspection challenge using machine learning | |
| CN109522913B (zh) | 检查方法和检查设备以及计算机可读介质 | |
| US20140010437A1 (en) | Compound object separation | |
| Rogers et al. | Threat Image Projection (TIP) into X-ray images of cargo containers for training humans and machines | |
| Jaccard et al. | Using deep learning on X-ray images to detect threats | |
| WO2017101514A1 (zh) | 检查货物的方法、系统和装置 | |
| US20090226032A1 (en) | Systems and methods for reducing false alarms in detection systems | |
| JP6567703B2 (ja) | 検査機器およびコンテナを検査する方法 | |
| Rogers et al. | Detection of cargo container loads from X-ray images | |
| US9846935B2 (en) | Segmentation of sheet objects from image generated using radiation imaging modality | |
| US20210256296A1 (en) | Object identification system and computer-implemented method | |
| US20190259160A1 (en) | Item classification using localized ct value distribution analysis | |
| Sharma et al. | Automatic detection of novel corona virus (SARS-CoV-2) infection in computed tomography scan based on local adaptive thresholding and kernel-support vectors | |
| Kehl et al. | Distinguishing malicious fluids in luggage via multi-spectral CT reconstructions | |
| Green et al. | Investigation of a Classification-based Technique to Detect Illicit Objects for Aviation Security. |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 14860336 Country of ref document: EP Kind code of ref document: A1 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 15034021 Country of ref document: US |
|
| ENP | Entry into the national phase |
Ref document number: 2016528054 Country of ref document: JP Kind code of ref document: A |
|
| REEP | Request for entry into the european phase |
Ref document number: 2014860336 Country of ref document: EP |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2014860336 Country of ref document: EP |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| REG | Reference to national code |
Ref country code: BR Ref legal event code: B01A Ref document number: 112016010097 Country of ref document: BR |
|
| ENP | Entry into the national phase |
Ref document number: 20167015104 Country of ref document: KR Kind code of ref document: A |
|
| ENP | Entry into the national phase |
Ref document number: 112016010097 Country of ref document: BR Kind code of ref document: A2 Effective date: 20160504 |