WO2015056423A1 - Hydraulic drive system - Google Patents
Hydraulic drive system Download PDFInfo
- Publication number
- WO2015056423A1 WO2015056423A1 PCT/JP2014/005093 JP2014005093W WO2015056423A1 WO 2015056423 A1 WO2015056423 A1 WO 2015056423A1 JP 2014005093 W JP2014005093 W JP 2014005093W WO 2015056423 A1 WO2015056423 A1 WO 2015056423A1
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- spool
- turning
- pressure
- hydraulic
- hydraulic pump
- Prior art date
Links
Images






Classifications
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B11/00—Servomotor systems without provision for follow-up action; Circuits therefor
- F15B11/16—Servomotor systems without provision for follow-up action; Circuits therefor with two or more servomotors
- F15B11/17—Servomotor systems without provision for follow-up action; Circuits therefor with two or more servomotors using two or more pumps
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2221—Control of flow rate; Load sensing arrangements
- E02F9/2232—Control of flow rate; Load sensing arrangements using one or more variable displacement pumps
- E02F9/2235—Control of flow rate; Load sensing arrangements using one or more variable displacement pumps including an electronic controller
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2278—Hydraulic circuits
- E02F9/2282—Systems using center bypass type changeover valves
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2278—Hydraulic circuits
- E02F9/2285—Pilot-operated systems
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2278—Hydraulic circuits
- E02F9/2292—Systems with two or more pumps
-
- E—FIXED CONSTRUCTIONS
- E02—HYDRAULIC ENGINEERING; FOUNDATIONS; SOIL SHIFTING
- E02F—DREDGING; SOIL-SHIFTING
- E02F9/00—Component parts of dredgers or soil-shifting machines, not restricted to one of the kinds covered by groups E02F3/00 - E02F7/00
- E02F9/20—Drives; Control devices
- E02F9/22—Hydraulic or pneumatic drives
- E02F9/2278—Hydraulic circuits
- E02F9/2296—Systems with a variable displacement pump
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B11/00—Servomotor systems without provision for follow-up action; Circuits therefor
- F15B11/02—Systems essentially incorporating special features for controlling the speed or actuating force of an output member
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/20—Fluid pressure source, e.g. accumulator or variable axial piston pump
- F15B2211/205—Systems with pumps
- F15B2211/2053—Type of pump
- F15B2211/20546—Type of pump variable capacity
- F15B2211/20553—Type of pump variable capacity with pilot circuit, e.g. for controlling a swash plate
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/20—Fluid pressure source, e.g. accumulator or variable axial piston pump
- F15B2211/205—Systems with pumps
- F15B2211/20576—Systems with pumps with multiple pumps
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/40—Flow control
- F15B2211/45—Control of bleed-off flow, e.g. control of bypass flow to the return line
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/60—Circuit components or control therefor
- F15B2211/63—Electronic controllers
- F15B2211/6303—Electronic controllers using input signals
- F15B2211/6306—Electronic controllers using input signals representing a pressure
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/60—Circuit components or control therefor
- F15B2211/63—Electronic controllers
- F15B2211/6303—Electronic controllers using input signals
- F15B2211/6306—Electronic controllers using input signals representing a pressure
- F15B2211/6313—Electronic controllers using input signals representing a pressure the pressure being a load pressure
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/60—Circuit components or control therefor
- F15B2211/63—Electronic controllers
- F15B2211/6303—Electronic controllers using input signals
- F15B2211/6306—Electronic controllers using input signals representing a pressure
- F15B2211/6316—Electronic controllers using input signals representing a pressure the pressure being a pilot pressure
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/60—Circuit components or control therefor
- F15B2211/63—Electronic controllers
- F15B2211/6303—Electronic controllers using input signals
- F15B2211/6346—Electronic controllers using input signals representing a state of input means, e.g. joystick position
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/60—Circuit components or control therefor
- F15B2211/665—Methods of control using electronic components
- F15B2211/6652—Control of the pressure source, e.g. control of the swash plate angle
-
- F—MECHANICAL ENGINEERING; LIGHTING; HEATING; WEAPONS; BLASTING
- F15—FLUID-PRESSURE ACTUATORS; HYDRAULICS OR PNEUMATICS IN GENERAL
- F15B—SYSTEMS ACTING BY MEANS OF FLUIDS IN GENERAL; FLUID-PRESSURE ACTUATORS, e.g. SERVOMOTORS; DETAILS OF FLUID-PRESSURE SYSTEMS, NOT OTHERWISE PROVIDED FOR
- F15B2211/00—Circuits for servomotor systems
- F15B2211/70—Output members, e.g. hydraulic motors or cylinders or control therefor
- F15B2211/71—Multiple output members, e.g. multiple hydraulic motors or cylinders
- F15B2211/7142—Multiple output members, e.g. multiple hydraulic motors or cylinders the output members being arranged in multiple groups
Definitions
- the present invention relates to a hydraulic drive system for a construction machine having a swing hydraulic motor.
- hydraulic fluid is generally supplied from a hydraulic pump driven by an engine to various hydraulic actuators.
- a hydraulic pump a variable displacement pump such as a swash plate pump or a swash shaft pump is used, and the flow rate of hydraulic oil discharged from the hydraulic pump is changed by changing the tilt angle of the hydraulic pump. .
- Patent Literature 1 discloses a hydraulic drive system that includes two hydraulic pumps driven by one engine and two regulators that adjust the tilt angles of the hydraulic pumps. In this hydraulic drive system, in order to prevent the engine from being stopped due to overload, horsepower control is performed so that the total horsepower of the individual hydraulic pumps does not exceed the output of the engine.
- Patent Document 1 the discharge pressure of the self-side hydraulic pump connected to the regulator and the discharge pressure of the counterpart hydraulic pump connected to the other regulator are led to each regulator.
- the regulator increases the tilt angle of the self-side hydraulic pump and increases the discharge flow rate of the self-side hydraulic pump as the discharge pressure of the self-side hydraulic pump and the counterpart hydraulic pump increases. That is, the tilt angles of the two hydraulic pumps are always kept at the same angle.
- the control pressure is guided to the both regulators from the proportional valve, and the tilt angle of both hydraulic pumps is increased as the control pressure is higher.
- horsepower control based on the discharge pressures of the self-side hydraulic pump and the counterpart hydraulic pump is sometimes referred to as total horsepower control
- horsepower control based on the control pressure is sometimes referred to as power shift control.
- each regulator includes a servo cylinder connected to the self-side hydraulic pump, a spool for controlling the servo cylinder, and the self-side hydraulic pump and the counterpart hydraulic pump having higher discharge pressure and control pressure. It includes a horsepower control piston that presses the spool in a direction that increases the discharge flow rate of the hydraulic pump.
- Patent Document 1 The hydraulic drive system disclosed in Patent Document 1 is intended for a hydraulic excavator, and hydraulic oil is supplied from one hydraulic pump to a swing hydraulic motor or the like via a control valve, and from the other hydraulic pump. The hydraulic oil is supplied to the bucket cylinder and the like through the control valve.
- each regulator is configured to decrease the discharge flow rate of the self-side hydraulic pump as the discharge pressure and control pressure of the self-side hydraulic pump and the counterpart hydraulic pump increase.
- the discharge flow rate of the other hydraulic pump can be increased.
- FIG. 9A the performance characteristics of one hydraulic pump are shown by a solid line A when the same load is applied to the hydraulic pump and the other hydraulic pump, and the one-dot chain line B shows the case where the other hydraulic pump is unloaded. Show.
- the above merits are effective, for example, in the case of single bucket operation.
- an object of the present invention is to provide a hydraulic drive system capable of suppressing wasteful consumption of energy during turning acceleration.
- a hydraulic drive system is a hydraulic drive system for a construction machine having a swing hydraulic motor, and is driven by an engine to discharge hydraulic oil at a flow rate corresponding to a tilt angle.
- the tilt angle of the first hydraulic pump is such that the discharge flow rate of the first pump decreases as they increase.
- the first regulator for adjusting the discharge pressure, the discharge pressure of the second hydraulic pump and the first hydraulic pump, and the power shift pressure.
- the second regulator that adjusts the tilt angle of the second hydraulic pump so that the discharge flow rate of the second pump decreases, and the power shift pressure that is guided to the first regulator and the second regulator is set. And a proportional valve.
- the discharge flow rate of the first hydraulic pump does not depend on the discharge pressure of the second hydraulic pump and does not change depending on the load state of the second hydraulic pump. Accordingly, the discharge flow rate of the first hydraulic pump does not become excessive during the turning operation, and wasteful consumption of energy during turning acceleration can be suppressed. Moreover, since the discharge flow rate of the second hydraulic pump depends on the discharge pressure of the first hydraulic pump as in the prior art, the discharge flow rate can be increased on the second hydraulic pump side when the first hydraulic pump is unloaded. .
- the system may further include a controller that controls the proportional valve so that when operated, the power shift pressure increases and the discharge flow rates of the first hydraulic pump and the second hydraulic pump decrease. According to this configuration, wasteful consumption of energy during turning acceleration can be effectively suppressed during a turning operation alone or a similar operation.
- the hydraulic drive system includes a spool operation detection line extending across the first multi-control valve and the second multi-control valve so as to pass through the monitoring spool including the turning spool, and the spool operation detection line.
- the spool may be configured not to block the spool operation detection line even when it is operated. According to this configuration, the turning single operation can be detected with a simple configuration.
- the hydraulic drive system includes a spool operation detection line extending over the first multi-control valve and the second multi-control valve so as to pass through a monitoring spool including the turning spool, and the turning spool.
- the pilot pressure is detected in any one of the turning pressure detector for detecting that the pilot pressure of the pilot circuit for operating the pressure is raised and the pilot circuit for operating the monitoring spool other than the turning spool.
- a non-turning pressure detector for detecting wherein the turning spool may be configured to shut off the spool operation detection line when operated. According to this configuration, it is possible to detect a single turning operation using a turning spool having a normal structure.
- the construction machine is a hydraulic excavator including a bucket, an arm, and a boom.
- the second multi-control valve includes a bucket spool and a boom spool as the monitoring spool, and the bucket spool is a bucket-out spool.
- the spool operation detection line is configured not to be interrupted even when operated in the direction
- the boom spool is configured not to interrupt the spool operation detection line even when operated in the boom lowering direction.
- the hydraulic drive system includes a bucket-out pressure detector for detecting that a pilot pressure in a bucket-out line in the pilot circuit that operates the bucket spool is raised, and a pilot that operates the boom spool.
- Boom lowering circuit A boom-lowering pressure detector for detecting the pilot pressure of the emissions stood, it may further comprise a. According to this configuration, it is possible to detect not only a turning operation but also a bucket-out operation and a boom lowering operation with a small required flow rate. As a result, wasteful energy consumption during turning acceleration is effective for simultaneous operations such as simultaneous turning and boom lowering, simultaneous turning and bucket out, and simultaneous turning and boom lowering and bucket out operations. Can be suppressed.
- the construction machine is a hydraulic excavator including a bucket, an arm, and a boom
- the hydraulic drive system includes the first multi-control valve and the second multi-control so as to pass through a monitoring spool including the turning spool.
- a spool operation detection line extending across the valve may be further provided.
- either the first multi-control valve or the second multi-control valve includes an arm spool as the monitoring spool, and the second multi-control valve includes a bucket spool as the monitoring spool.
- a boom spool wherein the swing spool, the arm spool, the bucket spool, and the boom spool are configured to shut off the spool operation detection line when operated, and the swing spool
- Each of the pilot circuits for operating the arm spool, the bucket spool, and the boom spool may be provided with a pressure detector for detecting that the pilot pressure of the pilot circuit is established.
- wasteful consumption of energy during turning acceleration can be suppressed.
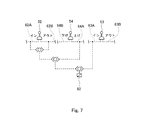
- FIG. 1 is an overall hydraulic circuit diagram of a hydraulic drive system according to a first embodiment of the present invention. It is a hydraulic circuit diagram from the 1st and 2nd multi-control valve in a 1st embodiment to a hydraulic actuator. It is a hydraulic-circuit figure for detecting operation other than turning in 2nd Embodiment of this invention. It is a hydraulic circuit diagram from the 1st and 2nd multi control valve in a 2nd embodiment to a hydraulic actuator.
- FIG. 5 is an overall hydraulic circuit diagram of a hydraulic drive system according to a third embodiment of the present invention. It is a hydraulic circuit diagram from the 1st and 2nd multi-control valve in a 3rd embodiment to a hydraulic actuator.
- FIG. 9A is a graph showing the performance characteristics of one hydraulic pump in the conventional hydraulic drive system
- FIG. 9B is a graph showing the performance characteristics of the first hydraulic pump in the first embodiment.
- FIG. 1 and 2 show a hydraulic drive system 1A according to a first embodiment of the present invention.
- FIG. 1 is an overall hydraulic circuit diagram of a hydraulic drive system 1A schematically showing the internal configuration of first and second multi-control valves 4A and 4B, which will be described later.
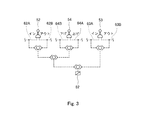
- FIG. 2 shows first and second multi-control valves.
- FIG. 3 is a hydraulic circuit diagram from valves 4A and 4B to a hydraulic actuator.
- the hydraulic drive system 1A is for a construction machine equipped with a swing hydraulic motor.
- the construction machine is a hydraulic excavator.
- the construction machine targeted by the hydraulic drive system 1A is not necessarily a hydraulic excavator, and may be a hydraulic crane, for example.
- a self-propelled hydraulic excavator includes a traveling device, a main body including a driver's cab that turns with respect to the traveling device, a boom that rises up and down with respect to the main body, an arm that is swingably connected to the tip of the boom, and a tip of the arm And a bucket that is swingably connected to the bucket. That is, the main body, the boom, the arm, and the bucket are revolving bodies that are revolved by a revolving hydraulic motor 24 described later.
- the main body In a hydraulic excavator mounted on a ship, the main body is supported by the hull so as to be able to turn.
- the hydraulic drive system 1A includes a swing hydraulic motor 24, a bucket cylinder 25, a boom cylinder 26, and an arm cylinder 27 as hydraulic actuators. Moreover, the hydraulic drive system 1A includes a first hydraulic pump 21 and a second hydraulic pump 22 that supply hydraulic oil to those hydraulic actuators, as shown in FIG. Hydraulic fluid is supplied from the first hydraulic pump 21 to the swing hydraulic motor 24, the boom cylinder 26, and the arm cylinder 27 via the first multi-control valve 4A, and from the second hydraulic pump 22, the second multi-control valve 4B. Hydraulic oil is supplied to the bucket cylinder 25, the boom cylinder 26, and the arm cylinder 27 via.
- first hydraulic pump 21 is connected to the first multi-control valve 4A by the first supply line 11.
- a first center bleed line 12 that guides hydraulic oil that has passed through the first multi-control valve 4A to the tank extends from the first multi-control valve 4A.
- the second hydraulic pump 22 is connected to the second multi-control valve 4B by the second supply line 15.
- a second center bleed line 16 that guides hydraulic oil that has passed through the second multi-control valve 4B to the tank extends from the second multi-control valve 4B.
- the discharge flow rate of the first hydraulic pump 21 and the discharge flow rate of the second hydraulic pump 22 are controlled by a negative control (hereinafter referred to as “negative control”) method. That is, a throttle 13 is provided in the first center bleed line 12, and a relief valve 14 is disposed on a passage that bypasses the throttle 13. Similarly, a throttle 17 is provided in the second center bleed line 16, and a relief valve 18 is disposed on a passage that bypasses the throttle 17.
- the relief valves 14 and 18 and the throttles 13 and 17 may be incorporated in the first multi-control valve 4A and the second multi-control valve 4B, respectively.
- the first multi-control valve 4A and the second multi-control valve 4B are open center type valves including a plurality of spools. That is, in the multi-control valve (4A or 4B), the amount of hydraulic fluid flowing from the supply line (11 or 15) to the center bleed line (12 or 16) is not limited when all the spools are in the neutral position. When that spool is activated and moved from the neutral position, the amount of hydraulic fluid flowing from the supply line (11 or 15) to the center bleed line (12 or 16) is limited by the spool.
- the first multi-control valve 4A includes a swing spool 41 for controlling the swing hydraulic motor 24, and the second multi-control valve 4B controls the bucket cylinder 25.
- the bucket spool 44 is included.
- the first multi-control valve 4A and the second multi-control valve 4B include boom spools 42 and 45 for controlling the boom cylinder 26 and arm spools 43 and 46 for controlling the arm cylinder 27, respectively. .
- the boom spool 45 of the second multi-control valve 4B achieves a first speed
- the boom spool 42 of the first multi-control valve 4A together with the boom spool 45 realizes a second speed higher than the first speed. belongs to.
- a check valve 47 is disposed on the line from the boom spool 42, which joins the head side line between the boom spool 45 and the boom cylinder 26.
- the arm spool 44 of the first multi-control valve 4A achieves a first speed
- the arm spool 46 of the second multi-control valve 4B together with the arm spool 44 realizes a second speed higher than the first speed. belongs to.
- each of the first multi-control valve 4A and the second multi-control valve 4B has a central passage 4a that connects the supply line (11 or 15) and the center bleed line (12 or 16) across all spools.
- a parallel passage 4b that guides hydraulic oil from the central passage 4a to each spool and a tank passage 4c that guides hydraulic oil from each spool (excluding the boom spool 42) to the tank are formed.
- each of the first multi-control valve 4A and the second multi-control valve 4B may include a traveling spool for controlling the traveling hydraulic motor.
- one or a plurality of optional spools may be included in one or both of the first multi-control valve 4A and the second multi-control valve 4B.
- the turning pilot circuit 61 for operating the turning spool 41 includes a right turning line 61A and a left turning line 61B extending from the turning operation valve 51 to the turning spool 41
- the bucket pilot circuit 63 for operating the bucket spool 44 includes: A bucket-in line 63A and a bucket-out line 63B extending from the bucket operation valve 53 to the bucket spool 44 are included.
- the boom pilot circuit 64 that operates the boom spools 42 and 45 includes a boom raising line 64A extending from the boom operation valve 54 to the boom spools 42 and 45, and a boom lowering extending only from the boom operation valve 54 to the boom spool 45.
- the arm pilot circuit 62 including the working line 64B and operating the arm spools 43 and 46 includes an arm-in line 62A and an arm-out line 62B extending from the arm operation valve 52 to the arm spools 43 and 46.
- Each operation valve 51 to 54 includes an operation lever. When the operation lever is tilted, pilot pressure is generated in the pilot lines (61A to 64B) in the direction in which the operation lever in the pilot circuit (61 to 64) is tilted, and the spools (41 to 46) are operated.
- the first hydraulic pump 21 and the second hydraulic pump 22 are driven by the engine 10 and discharge hydraulic oil at a flow rate corresponding to the tilt angle.
- a swash plate pump whose tilt angle is defined by the angle of the swash plate 20 is employed as the first hydraulic pump 21 and the second hydraulic pump 22.
- the first hydraulic pump 21 and the second hydraulic pump 22 may be a slant shaft pump whose tilt angle is defined by a slant shaft angle.
- the tilt angle of the first hydraulic pump 21 is adjusted by the first regulator 3A
- the tilt angle of the second hydraulic pump 22 is adjusted by the second regulator 3B.
- the first regulator 3A includes a servo cylinder 31 connected to the swash plate 20 of the first hydraulic pump 21, a spool 32 for controlling the servo cylinder 31, a negative control piston 33 and a horsepower control piston for operating the spool 32. 34a.
- the small diameter side pressure receiving chamber of the servo cylinder 31 communicates with the first supply line 11.
- the spool 32 controls the opening area of the line connecting the large diameter side pressure receiving chamber of the servo cylinder 31 and the first supply line 11 and also controls the opening area of the line connecting the large diameter side pressure receiving chamber and the tank. .
- the servo cylinder 31 reduces the tilt angle of the first hydraulic pump 21 when the large diameter side pressure receiving chamber communicates with the first supply line 11 with a larger opening area, and the large diameter side pressure receiving chamber has a larger opening area with the tank. When communicating, the tilt of the first hydraulic pump 21 is increased.
- the negative control piston 33 and the horsepower control piston 34 a press the spool 32 in a direction in which the large-diameter pressure receiving chamber of the servo cylinder 31 communicates with the first supply line 11, that is, in a direction in which the discharge flow rate of the first hydraulic pump 21 decreases. To do.
- the first regulator 3A is formed with a pressure receiving chamber for causing the negative control piston 33 to press the spool 32.
- a first negative control pressure Pn1 which is a pressure upstream of the throttle 13 in the first center bleed line 12, is guided to the pressure receiving chamber of the negative control piston 33.
- the first negative control pressure Pn1 is determined by the degree of restriction of the hydraulic oil flowing through the central passage 4a by the spool.
- the horsepower control piston 34a is for decreasing the discharge flow rate of the first hydraulic pump 21 as they increase in accordance with the discharge pressure Pd1 and the power shift pressure Ps of the first hydraulic pump 21.
- the first regulator 3A is formed with two pressure receiving chambers for causing the horsepower control piston 34a to press the spool 32.
- the two pressure receiving chambers of the horsepower control piston 34a are connected to the first supply line 11 and a power shift line 71A, which will be described later, respectively.
- the pressure receiving chambers are respectively connected to the discharge pressure Pd1 of the first hydraulic pump 21 and A power shift pressure Ps is derived.
- the negative control piston 33 and the horsepower control piston 34a are configured so as to press the spool 32 with priority given to the one that restricts the discharge flow rate of the first hydraulic pump 21 (the one that is reduced).
- the second regulator 3B has the same configuration as the first regulator 3A except that a horsepower control piston 34b is employed instead of the horsepower control piston 34a. That is, the second regulator 3B adjusts the tilt angle of the second hydraulic pump 22 by the negative control piston 33 based on the second negative control pressure Pn2.
- the horsepower control piston 34b decreases the discharge flow rate of the second hydraulic pump 22 as they increase. Is for.
- the second regulator 3B is formed with three pressure receiving chambers for causing the horsepower control piston 34b to press the spool 32.
- the three pressure receiving chambers of the horsepower control piston 34b are connected to the second supply line 15, the first supply line 11 and the power shift line 71A, respectively, and the pressure receiving chambers of the second hydraulic pump 22 are respectively connected thereto.
- the discharge pressure Pd2, the discharge pressure Pd1 of the first hydraulic pump 21, and the power shift pressure Ps are introduced.
- the spring 35a biasing the spool 32 from the opposite side of the horsepower control piston 34a in the first regulator 3A and the horsepower control piston 34b in the second regulator 3B are opposite.
- the urging forces of the springs 35b that urge the spool 32 from the side are different from each other.
- the discharge pressure from the auxiliary pump 23 driven by the engine 10 is supplied as a primary pressure to the proportional valve 72 through the pilot pressure supply line 71.
- the control pressure from the proportional valve 72 is output to the power shift line 71A, and a pair of branch lines are connected from the power shift line 71A to one of the pressure receiving chambers of the horsepower control piston 34a in the first regulator 3A and the second regulator 3B. Extends to one of the pressure receiving chambers of the horsepower control piston 34b.
- the proportional valve 72 is for setting the power shift pressure Ps guided to the first regulator 3A and the second regulator 3B.
- the proportional valve 72 is controlled by the controller 8.
- the controller 8 includes an arithmetic device, a storage device, and the like.
- the controller 8 controls the proportional valve 72 so that the power shift pressure Ps increases and the discharge flow rates of the first hydraulic pump 21 and the second hydraulic pump 22 decrease when only the turning spool 41 operates. To control.
- a configuration for the control will be described.
- the turning pilot circuit 61 is provided with a turning pressure detector 81 for detecting that the pilot pressure of the turning pilot circuit 61 is raised, in other words, that the operation lever of the turning operation valve 51 is tilted. ing.
- the turning pressure detector 81 is configured to selectively detect the pilot pressure with the higher pilot pressure among the right turning line 61A and the left turning line 61B, which are a pair of pilot lines.
- a pressure sensor is used as the turning pressure detector 81.
- the turning pressure detector 81 may be a pressure switch that is turned on or off when a pilot pressure is established in the turning pilot circuit 61.
- the spool operation detection line 73 branches from the power shift line 71A.
- the spool operation detection line 73 extends across the first multi-control valve 4A and the second multi-control valve 4B so as to pass through the monitoring spool 40, and is connected to the tank.
- the monitoring spool 40 is the turning spool 41 of the first multi-control valve 4A, the bucket spool 44, the boom spool 45, and the arm spool 46 of the second multi-control valve 4B.
- the order in which the spool operation detection line 73 passes through the monitoring spool 40 is not particularly limited.
- the boom spool 42 and the arm spool 43 of the first multi-control valve 4A may be employed instead of the boom spool 45 and the arm spool 46 of the second multi-control valve 4B.
- the option spool may be included in the monitoring spool 40.
- the turning spool 41 is configured not to block the spool operation detection line 73 even when it is operated even when it is positioned at the neutral position (when it is moved from the neutral position).
- the monitoring spool 40 other than the turning spool does not block the spool operation detection line 73 when positioned at the neutral position, but blocks the spool operation detection line 73 when operated (when moved from the neutral position). It is configured. That is, the spool operation detection line 73 is not blocked when only the swing operation valve 51 is operated, but is blocked when any one of the bucket operation valve 53, the boom operation valve 54, and the arm operation valve 52 is operated.
- the upstream side of the spool operation detection line 73 is provided with a throttle 74 for preventing the pressure of the pilot pressure supply line 71 from excessively decreasing even when all the monitoring spools are neutral.
- the spool operation detection line 73 is provided with a monitoring pressure detector 75 between the throttle 74 and the second multi-control valve 4B for detecting that the spool operation detection line 73 is blocked.
- a pressure sensor is used as the monitoring pressure detector 75.
- the monitoring pressure detector 75 may be a pressure switch that is turned on or off when the spool operation detection line 73 is interrupted.
- the controller 8 controls the proportional valve 72 so that the power shift pressure Ps is increased. Thereby, the discharge flow rates of the first hydraulic pump 21 and the second hydraulic pump 22 are reduced. As a result, the amount of hydraulic oil supplied to the turning hydraulic motor 24 during turning acceleration can be suppressed, and wasteful consumption of energy can be suppressed. Note that the controller 8 may control the proportional valve 72 so that the power shift pressure Ps is restored after the acceleration period of turning has passed.
- FIG. 9B the performance characteristic of the first hydraulic pump 21 when the power shift pressure Ps is raised is indicated by a two-dot chain line C.
- a solid line A in the figure indicates the performance characteristic of the first hydraulic pump 21 when the power shift pressure Ps is low, that is, before the power shift pressure is increased.
- FIG. 9B shows that the discharge flow rate of the first hydraulic pump 21 can be kept low by increasing the power shift pressure Ps in the case of a single turning operation.
- the turning pressure detector 81 is provided in the turning pilot circuit 61, the above-described effects can be obtained with an inexpensive configuration as compared with the case where the pressure detector is provided in the first supply line 11. Can do. Further, in the present embodiment, since the power shift pressure Ps is used while being superimposed on the horsepower control by the regulator, an increase in the discharge flow rate of the first hydraulic pump 21 is suppressed with simple control logic in the case of a single turning operation. Can be obtained. Furthermore, the load pressure acting on the swing hydraulic motor 24 decreases as it proceeds to the second half of the swing acceleration, and a large flow rate is required to increase the swing speed. In this embodiment, however, the power shift pressure Ps causes the flow rate to increase.
- the discharge flow rate of the first hydraulic pump 21 during the turning single operation is temporarily reduced, in the latter half of the turning acceleration, as the discharge pressure Pd1 of the first hydraulic pump 21 decreases, the horsepower control action by the regulator described above is performed. As a result, the discharge flow rate of the first hydraulic pump 21 automatically increases. As a result, the hydraulic hydraulic motor 24 is supplied with a sufficient amount of hydraulic oil corresponding to the load at each turning stage, so that the feeling of operation during turning is not impaired.
- the turning operation valve is simply provided with a pressure detector in the turning pilot circuit 61 and the spool operation detection line 73. It can be detected that only 51 has been operated. That is, it is possible to detect a single turning operation with a simple configuration.
- the discharge flow rate of the second hydraulic pump 22 depends on the discharge pressure Pd1 of the first hydraulic pump 21 as in the conventional case, the first hydraulic pump 21 is unloaded on the second hydraulic pump 22 side. In some cases (for example, in the case of single bucket operation), the discharge flow rate can be increased.
- the proportional valve 72 is controlled so that the power shift pressure Ps is increased when only the turning spool 41 is operated.
- the proportional valve 72 is not controlled even when only the turning spool 41 is operated.
- the power shift pressure Ps may be kept constant. That is, in the configuration of the first regulator 3A shown in FIG. 1, the discharge flow rate of the first hydraulic pump 21 does not depend on the discharge pressure Pd2 of the second hydraulic pump 22, and does not change depending on the load state of the second hydraulic pump 22. Absent. In other words, even if the load state of the second hydraulic pump 22 changes, the solid line A in FIG. 9B remains unchanged.
- the spool operation detection line 73 does not necessarily have to pass through the turning spool 41, and the number of ports for the turning spool 41 may be six. In this case, the spool operation detection line 73 may be provided only in the second multi-control valve 4B.
- the spool operation detection line 73 is cut off. That is, the spool operation detection line 73 is shut off regardless of which of the swing operation valve 51, the bucket operation valve 53, the boom operation valve 54, and the arm operation valve 52 (see FIG. 1 for the operation valves 51 to 54). .
- a non-turning pressure detector 82 is provided for detecting that the pilot pressure has been established.
- the non-turning pressure detector 82 is configured to selectively detect the pilot pressure of the highest pilot pressure among all the pilot lines (62A to 64B) of the pilot circuits 62 to 64.
- a pressure sensor is used as the non-turning pressure detector 82.
- the non-turning pressure detector 82 may be a pressure switch that is turned on or off when a pilot pressure is established in any of the pilot circuits 62 to 64.
- the controller 8 increases the power shift pressure Ps and the discharge flow rates of the first hydraulic pump 21 and the second hydraulic pump 22.
- the proportional valve 72 is controlled so as to decrease.
- the spool operation detection line 73 is cut off when the turning spool 41 is operated, it is possible to detect a turning single operation using a turning spool having a normal structure. it can.
- the hydraulic drive system incorporated in the existing construction machine can be modified at low cost to the hydraulic drive system of the present embodiment.
- the bucket spool 44 is configured not to block the spool operation detection line 73 even when it operates in the bucket-out direction.
- the bucket pilot circuit 63 is provided with a bucket-out pressure detector 83 for detecting that the pilot pressure in the bucket-out line 63B has risen.
- a pressure sensor is used as the bucket-out pressure detector 83.
- the bucket-out pressure detector 83 may be a pressure switch that is turned on or off when the pilot pressure of the bucket-out line 63B is raised.
- the boom pilot circuit 64 is provided with a boom lowering pressure detector 84 for detecting that the pilot pressure of the boom lowering line 64B has been raised.
- a pressure sensor is used as the boom lowering pressure detector 84.
- the boom lowering pressure detector 84 may be a pressure switch that is turned on or off when the pilot pressure of the boom lowering line 64B is raised.
- the controller 8 controls the proportional valve 72 so that the power shift pressure Ps becomes high in the following four cases. Thereby, the discharge flow rate with respect to the discharge pressure of each of the first hydraulic pump 21 and the second hydraulic pump 22 decreases. As a result, the amount of hydraulic oil supplied to the turning hydraulic motor 24 during turning acceleration can be suppressed, and wasteful consumption of energy can be suppressed. Note that the controller 8 may control the proportional valve 72 so that the power shift pressure Ps is restored after the acceleration period of turning has passed.
- the first of the four cases described above is based on the pilot pressure detection by the turning pressure detector 81 and the non-detection of the monitoring pressure detector 75, the bucket-out pressure detector 83, and the boom lowering pressure detector 84. This is a case where it is determined that only the operation valve 51 has been operated.
- the swing operation valve 51 is operated by the pilot pressure detection by the swing pressure detector 81 and the bucket-out pressure detector 83 and the non-detection of the monitoring pressure detector 75 and the boom lowering pressure detector 84. And it is a case where it determines with the bucket operation valve 53 having been operated in the bucket out direction.
- the turning operation valve 51 is operated by detecting the pilot pressure by the turning pressure detector 81 and the boom lowering pressure detector 84 and by not detecting the monitoring pressure detector 75 and the bucket-out pressure detector 83. And it is a case where it determines with the boom operation valve 54 having been operated by the boom lowering direction.
- the swing operation valve 51 is operated by the pilot pressure detection by the swing pressure detector 81, the bucket-out pressure detector 83, and the boom lowering pressure detector 84 and the non-detection of the monitoring pressure detector 75. In this case, it is determined that the bucket operation valve 53 is operated in the bucket-out direction and the boom operation valve 54 is operated in the boom lowering direction.
- the non-turning pressure detector 82 shown in FIG. 7 is employed as in the second embodiment, the turning spool 41, the bucket spool 44, and the boom spool 45 are replaced with a normal one as shown in FIG. It can be changed to a structure (a structure that shuts off the spool operation detection line 73 when it is operated).
- the non-turning pressure detector 82 since the bucket-out pressure detector 83 and the boom lowering pressure detector 84 are provided in this embodiment, as shown in FIG. 7, the non-turning pressure detector 82 selectively applies the pilot pressure.
- the boom lowering line 64B and the bucket out line 63B may be removed from the pilot line to be detected.
- the bucket-in pressure detector is connected to the bucket-in line 63A of the bucket pilot circuit 63.
- a boom raising pressure detector 86 is provided on the boom raising line 64A of the boom pilot circuit 64
- an arm pressure detector 87 is provided on the arm pilot circuit 62 (arm-in line 62A and arm-out line 62B).
- the bucket-in pressure detector 85 is for detecting that the pilot pressure in the bucket-in line 63A has been established, and the boom raising pressure detector 86 has been established in the boom raising line 64A.
- the arm pressure detector 87 is for detecting that the pilot pressure of the arm pilot circuit 62 (arm-in line 62A and arm-out line 62B) has been established.
- the present embodiment can provide the same effects as those of the third embodiment.
- the pressure detectors are provided in the pilot circuits 61 to 64 of all the operation valves 51 to 54, the monitoring spool 40 is a swirl spool 41 having a normal structure, and a bucket spool 44. Even if the boom spool 45 and the arm spool 46 are used, it is possible to detect the turning operation alone. As a result, the hydraulic drive system incorporated in the existing construction machine can be retrofitted to the hydraulic drive system of the present embodiment at a low cost.
- the arm spool 46 of the second multi-control valve 4B is the monitoring spool 40.
- the arm spool 43 of the first multi-control valve 4A is monitored.
- the spool 40 may be used.
- the bucket pilot circuit 63 uses a bucket-in line instead of the bucket-out pressure detector 83 and the bucket-in pressure detector 85.
- a pressure detector (not shown) configured to selectively detect a pilot pressure having a higher pilot pressure among 63A and the bucket-out line 63B may be provided.
- the boom pilot circuit 64 uses a boom raising pressure detector 84 and a boom raising pressure detector 86 instead of the boom raising pressure detector 84.
- a pressure detector (not shown) configured to selectively detect the pilot pressure with the higher pilot pressure out of the line 64A and the boom lowering line 64B may be provided.
- the discharge flow rate control method of the first and second hydraulic pumps 21 and 22 is not necessarily the negative control method, and may be the positive control method. That is, the first and second regulators 3 ⁇ / b> A and 3 ⁇ / b> B may have a positive control piston instead of the negative control piston 33. Or the system (what is called an electric positive control) which performs flow control electrically may be used. Further, the control method of the discharge flow rate of the first and second hydraulic pumps 21 and 22 may be a load sensing method.
- the hydraulic drive system of the present invention is useful for various construction machines.
Landscapes
- Engineering & Computer Science (AREA)
- General Engineering & Computer Science (AREA)
- Mining & Mineral Resources (AREA)
- Civil Engineering (AREA)
- Structural Engineering (AREA)
- Physics & Mathematics (AREA)
- Fluid Mechanics (AREA)
- Mechanical Engineering (AREA)
- Fluid-Pressure Circuits (AREA)
- Operation Control Of Excavators (AREA)
Abstract
Description
図1および図2に、本発明の第1実施形態に係る油圧駆動システム1Aを示す。図1は、後述する第1および第2マルチコントロールバルブ4A,4Bの内部構成を簡略的に示す油圧駆動システム1Aの全体的な油圧回路図であり、図2は、第1および第2マルチコントロールバルブ4A,4Bから油圧アクチュエータまでの油圧回路図である。 (First embodiment)
1 and 2 show a
前記実施形態では、旋回用スプール41のみが作動したときにパワーシフト圧Psが高くなるように比例弁72が制御されるが、旋回用スプール41のみが作動したときでも比例弁72が制御されずに、パワーシフト圧Psが一定に維持されてもよい。すなわち、図1に示す第1レギュレータ3Aの構成では、第1油圧ポンプ21の吐出流量は、第2油圧ポンプ22の吐出圧Pd2に依存せず、第2油圧ポンプ22の負荷状態によって変わることはない。換言すれば、第2油圧ポンプ22の負荷状態が変わっても図9Bの実線Aは不変である。このため、パワーシフト圧Psが一定に維持されても、旋回操作のときに第1油圧ポンプ21の吐出流量が過大となることがなく、旋回加速時のエネルギーの無駄な消費を抑制することができる。ただし、前記実施形態のように、旋回用スプール41のみが作動したときにパワーシフト圧Psが高くなれば、旋回単独操作のときに旋回加速時のエネルギーの無駄な消費を効果的に抑制することができる。なお、旋回操作のときにパワーシフト圧Psを一定に維持するという変形例は、後述する第2~第4実施形態にも適用可能である。 <Modification>
In the above embodiment, the
次に、図3および図4を参照して、本発明の第2実施形態に係る油圧駆動システムを説明する。なお、本実施形態ならびに後述する第3および第4実施形態において、第1実施形態と同一構成要素には同一符号を付し、重複した説明は省略する。 (Second Embodiment)
Next, with reference to FIG. 3 and FIG. 4, the hydraulic drive system which concerns on 2nd Embodiment of this invention is demonstrated. In the present embodiment and third and fourth embodiments to be described later, the same components as those in the first embodiment are denoted by the same reference numerals, and redundant description is omitted.
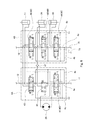
次に、図5および図6を参照して、本発明の第3実施形態に係る油圧駆動システム1Bを説明する。本実施形態では、旋回操作だけでなく、必要流量が少ないバケットアウト操作およびブーム下げ操作も検出することができる構成が採用されている。そして、コントローラ8は、旋回用スプール41のみが作動したときだけでなく、旋回用スプール41が作動し、かつ、バケット用スプール44および/またはブーム用スプール45が必要流量が少ない方向(バケットアウトおよび/またはブーム下げの方向)に作動したときも、パワーシフト圧Psが高くなって第1油圧ポンプ21および第2油圧ポンプ22の吐出流量が減少するように比例弁72を制御する。 (Third embodiment)
Next, with reference to FIGS. 5 and 6, a
バケットアウト操作およびブーム下げ操作は、必ずしも双方が検出可能である必要はなく、いずれか一方が検出可能であってもよい。 <Modification>
Both the bucket-out operation and the boom lowering operation do not necessarily need to be detectable, and either one may be detectable.
次に、図8を参照して、本発明の第4実施形態に係る油圧駆動システム1Cを説明する。本実施形態では、全ての監視用スプール40が図4に示すような通常の構造(作動したときにスプール作動検出ライン73を遮断する構造)を有している。 (Fourth embodiment)
Next, with reference to FIG. 8, a
前記第1実施形態ないし第4実施形態において、第1および第2油圧ポンプ21,22の吐出流量の制御方式は、必ずしもネガコン方式である必要はなく、ポジティブコントロール方式であってもよい。すなわち、第1および第2レギュレータ3A,3Bはネガコン用ピストン33の代わりにポジコン用ピストンを有してもよい。あるいは、流量制御を電気的に行う方式(いわゆる電気ポジコン)であってもよい。また、第1および第2油圧ポンプ21,22の吐出流量の制御方式は、ロードセンシング方式であってもよい。 (Other embodiments)
In the first to fourth embodiments, the discharge flow rate control method of the first and second
21 第1油圧ポンプ
22 第2油圧ポンプ
24 旋回油圧モータ
3A 第1レギュレータ
3B 第2レギュレータ
4A 第1マルチコントロールバルブ
4B 第2マルチコントロールバルブ
40 監視用スプール
41 旋回用スプール
44 バケット用スプール
42,45 ブーム用スプール
61~64 パイロット回路
63B バケットアウト用ライン
64B ブーム下げ用ライン
72 比例弁
73 スプール作動検出ライン
75 監視用圧力検出器
8 コントローラ
81 旋回用圧力検出器
82 非旋回用圧力検出器
83 バケットアウト用圧力検出器
84 ブーム下げ用圧力検出器 DESCRIPTION OF
Claims (6)
- 旋回油圧モータを具備する建設機械用の油圧駆動システムであって、
エンジンにより駆動されて傾転角に応じた流量の作動油を吐出する第1油圧ポンプおよび第2油圧ポンプと、
前記第1油圧ポンプと接続された、前記旋回油圧モータを制御するための旋回用スプールを含む第1マルチコントロールバルブと、
前記第2油圧ポンプと接続された第2マルチコントロールバルブと、
前記第1油圧ポンプの吐出圧およびパワーシフト圧に応じて、それらが高くなるほど前記第1ポンプの吐出流量が減少するように前記第1油圧ポンプの傾転角を調整する第1レギュレータと、
前記第2油圧ポンプおよび前記第1油圧ポンプの吐出圧ならびに前記パワーシフト圧に応じて、それらが高くなるほど前記第2ポンプの吐出流量が減少するように前記第2油圧ポンプの傾転角を調整する第2レギュレータと、
前記第1レギュレータおよび前記第2レギュレータに導かれる前記パワーシフト圧を設定する比例弁と、
を備える、油圧駆動システム。 A hydraulic drive system for a construction machine having a swing hydraulic motor,
A first hydraulic pump and a second hydraulic pump that are driven by an engine to discharge hydraulic oil at a flow rate according to a tilt angle;
A first multi-control valve connected to the first hydraulic pump and including a swing spool for controlling the swing hydraulic motor;
A second multi-control valve connected to the second hydraulic pump;
A first regulator that adjusts a tilt angle of the first hydraulic pump so that a discharge flow rate of the first pump decreases as they increase according to a discharge pressure and a power shift pressure of the first hydraulic pump;
In accordance with the discharge pressure of the second hydraulic pump and the first hydraulic pump and the power shift pressure, the tilt angle of the second hydraulic pump is adjusted so that the discharge flow rate of the second pump decreases as they increase. A second regulator that
A proportional valve for setting the power shift pressure led to the first regulator and the second regulator;
A hydraulic drive system comprising: - 前記旋回用スプールのみが作動したとき、または前記旋回用スプールが作動し、かつ、前記第2マルチコントロールバルブに含まれる1つまたは複数のスプールが必要流量が少ない方向に作動したときに、前記パワーシフト圧が高くなって前記第1油圧ポンプおよび前記第2油圧ポンプの吐出流量が減少するように前記比例弁を制御するコントローラをさらに備える、請求項1に記載の油圧駆動システム。 When only the turning spool is operated, or when the turning spool is operated and one or more spools included in the second multi-control valve are operated in a direction where the required flow rate is low, the power 2. The hydraulic drive system according to claim 1, further comprising a controller that controls the proportional valve so that a shift pressure increases and a discharge flow rate of the first hydraulic pump and the second hydraulic pump decreases.
- 前記旋回用スプールを含む監視用スプールを経由するように前記第1マルチコントロールバルブおよび前記第2マルチコントロールバルブに跨って延びるスプール作動検出ラインと、
前記スプール作動検出ラインが遮断されたことを検出するための監視用圧力検出器と、
前記旋回用スプールを作動させるパイロット回路のパイロット圧が立ったことを検出するための旋回用圧力検出器と、をさらに備え、
前記旋回用スプールは、作動したときでも前記スプール作動検出ラインを遮断しないように構成されている、請求項2に記載の油圧駆動システム。 A spool operation detection line extending across the first multi-control valve and the second multi-control valve so as to pass through the monitoring spool including the turning spool;
A monitoring pressure detector for detecting that the spool operation detection line is shut off;
A turning pressure detector for detecting that a pilot pressure of a pilot circuit for operating the turning spool has been established,
The hydraulic drive system according to claim 2, wherein the turning spool is configured not to block the spool operation detection line even when the spool is operated. - 前記旋回用スプールを含む監視用スプールを経由するように前記第1マルチコントロールバルブおよび前記第2マルチコントロールバルブに跨って延びるスプール作動検出ラインと、
前記旋回用スプールを作動させるパイロット回路のパイロット圧が立ったことを検出するための旋回用圧力検出器と、
前記旋回用スプール以外の前記監視用スプールを作動させるパイロット回路のいずれかにおいてパイロット圧が立ったことを検出するための非旋回用圧力検出器と、をさらに備え、
前記旋回用スプールは、作動したときに前記スプール作動検出ラインを遮断するように構成されている、請求項2に記載の油圧駆動システム。 A spool operation detection line extending across the first multi-control valve and the second multi-control valve so as to pass through the monitoring spool including the turning spool;
A turning pressure detector for detecting that a pilot pressure of a pilot circuit for operating the turning spool has been established;
A non-turning pressure detector for detecting that a pilot pressure has been established in any of the pilot circuits that operate the monitoring spool other than the turning spool;
The hydraulic drive system according to claim 2, wherein the turning spool is configured to shut off the spool operation detection line when operated. - 前記建設機械は、バケット、アームおよびブームを備える油圧ショベルであり、
前記第2マルチコントロールバルブは、前記監視用スプールとして、バケット用スプールとブーム用スプールを含み、
前記バケット用スプールは、バケットアウトの方向に作動したときでも前記スプール作動検出ラインを遮断しないように構成されており、
前記ブーム用スプールは、ブーム下げの方向に作動したときでも前記スプール作動検出ラインを遮断しないように構成されており、
前記バケット用スプールを作動させるパイロット回路におけるバケットアウト用ラインのパイロット圧が立ったことを検出するためのバケットアウト用圧力検出器と、
前記ブーム用スプールを作動させるパイロット回路におけるブーム下げ用ラインのパイロット圧が立ったことを検出するためのブーム下げ用圧力検出器と、
をさらに備える、請求項3または4に記載の油圧駆動システム。 The construction machine is a hydraulic excavator including a bucket, an arm and a boom,
The second multi-control valve includes a bucket spool and a boom spool as the monitoring spool,
The bucket spool is configured not to interrupt the spool operation detection line even when operated in the bucket-out direction,
The boom spool is configured not to block the spool operation detection line even when operated in a boom lowering direction.
A bucket-out pressure detector for detecting that the pilot pressure of the bucket-out line in the pilot circuit for operating the bucket spool has been established;
A boom lowering pressure detector for detecting that the pilot pressure of the boom lowering line in the pilot circuit for operating the boom spool is raised;
The hydraulic drive system according to claim 3 or 4, further comprising: - 前記建設機械は、バケット、アームおよびブームを備える油圧ショベルであり、
前記旋回用スプールを含む監視用スプールを経由するように前記第1マルチコントロールバルブおよび前記第2マルチコントロールバルブに跨って延びるスプール作動検出ラインをさらに備え、
前記第1マルチコントロールバルブと前記第2マルチコントロールバルブのどちらかは、前記監視用スプールとして、アーム用スプールを含み、
前記第2マルチコントロールバルブは、前記監視用スプールとして、バケット用スプールとブーム用スプールを含み、
前記旋回用スプール、前記アーム用スプール、前記バケット用スプールおよび前記ブーム用スプールは、作動したときに前記スプール作動検出ラインを遮断するように構成されており、
前記旋回用スプール、前記アーム用スプール、前記バケット用スプールおよび前記ブーム用スプールを作動させるパイロット回路のそれぞれには、当該パイロット回路のパイロット圧が立ったことを検出するための圧力検出器が設けられている、請求項1に記載の油圧駆動システム。 The construction machine is a hydraulic excavator including a bucket, an arm and a boom,
A spool operation detection line extending across the first multi-control valve and the second multi-control valve so as to pass through the monitoring spool including the turning spool;
Either the first multi-control valve or the second multi-control valve includes an arm spool as the monitoring spool,
The second multi-control valve includes a bucket spool and a boom spool as the monitoring spool,
The swing spool, the arm spool, the bucket spool, and the boom spool are configured to shut off the spool operation detection line when operated.
Each of the pilot circuits for operating the turning spool, the arm spool, the bucket spool, and the boom spool is provided with a pressure detector for detecting that the pilot pressure of the pilot circuit has been established. The hydraulic drive system according to claim 1.
Priority Applications (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201480056724.6A CN105637228A (en) | 2013-10-15 | 2014-10-07 | Hydraulic drive system |
| GB1606886.8A GB2534518A (en) | 2013-10-15 | 2014-10-07 | Hydraulic drive system |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2013-214605 | 2013-10-15 | ||
| JP2013214605A JP6088396B2 (en) | 2013-10-15 | 2013-10-15 | Hydraulic drive system |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| WO2015056423A1 true WO2015056423A1 (en) | 2015-04-23 |
Family
ID=52827883
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/JP2014/005093 WO2015056423A1 (en) | 2013-10-15 | 2014-10-07 | Hydraulic drive system |
Country Status (4)
| Country | Link |
|---|---|
| JP (1) | JP6088396B2 (en) |
| CN (1) | CN105637228A (en) |
| GB (1) | GB2534518A (en) |
| WO (1) | WO2015056423A1 (en) |
Families Citing this family (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP6106063B2 (en) * | 2013-10-15 | 2017-03-29 | 川崎重工業株式会社 | Hydraulic drive system |
| JP2018128127A (en) * | 2017-02-10 | 2018-08-16 | 川崎重工業株式会社 | Liquid pressure drive system |
| KR102172626B1 (en) * | 2018-12-19 | 2020-11-02 | 주식회사 두산 | Hydraulic pump assembly |
| JP7530312B2 (en) | 2021-02-12 | 2024-08-07 | 川崎重工業株式会社 | Multi-Control Valve |
Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH04143473A (en) * | 1990-10-05 | 1992-05-18 | Komatsu Ltd | Control device of oil-hydraulic pump |
| JPH10141241A (en) * | 1996-11-14 | 1998-05-26 | Kato Works Co Ltd | Input torque control circuit for variable displacement pump |
| JP2005344430A (en) * | 2004-06-04 | 2005-12-15 | Sumitomo (Shi) Construction Machinery Manufacturing Co Ltd | Turning independent operation detection circuit of hydraulic shovel |
| JP2008196165A (en) * | 2007-02-09 | 2008-08-28 | Hitachi Constr Mach Co Ltd | Pump torque control device of hydraulic construction machinery |
Family Cites Families (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP3383754B2 (en) * | 1997-09-29 | 2003-03-04 | 日立建機株式会社 | Hydraulic construction machine hydraulic pump torque control device |
| JP2009293428A (en) * | 2008-06-03 | 2009-12-17 | Hitachi Constr Mach Co Ltd | Pump torque correcting device for hydraulic working machine |
| JP5383537B2 (en) * | 2010-02-03 | 2014-01-08 | 日立建機株式会社 | Hydraulic system pump controller |
-
2013
- 2013-10-15 JP JP2013214605A patent/JP6088396B2/en not_active Expired - Fee Related
-
2014
- 2014-10-07 GB GB1606886.8A patent/GB2534518A/en not_active Withdrawn
- 2014-10-07 CN CN201480056724.6A patent/CN105637228A/en active Pending
- 2014-10-07 WO PCT/JP2014/005093 patent/WO2015056423A1/en active Application Filing
Patent Citations (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JPH04143473A (en) * | 1990-10-05 | 1992-05-18 | Komatsu Ltd | Control device of oil-hydraulic pump |
| JPH10141241A (en) * | 1996-11-14 | 1998-05-26 | Kato Works Co Ltd | Input torque control circuit for variable displacement pump |
| JP2005344430A (en) * | 2004-06-04 | 2005-12-15 | Sumitomo (Shi) Construction Machinery Manufacturing Co Ltd | Turning independent operation detection circuit of hydraulic shovel |
| JP2008196165A (en) * | 2007-02-09 | 2008-08-28 | Hitachi Constr Mach Co Ltd | Pump torque control device of hydraulic construction machinery |
Also Published As
| Publication number | Publication date |
|---|---|
| GB2534518A (en) | 2016-07-27 |
| JP2015078713A (en) | 2015-04-23 |
| CN105637228A (en) | 2016-06-01 |
| JP6088396B2 (en) | 2017-03-01 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| JP6220228B2 (en) | Hydraulic drive system for construction machinery | |
| WO2015056422A1 (en) | Hydraulic drive system | |
| US7497080B2 (en) | Hydraulic controlling device of working machine | |
| WO2006006448A1 (en) | Hydraulic drive device for working vehicle | |
| JP6514522B2 (en) | Hydraulic drive system of unloading valve and hydraulic shovel | |
| JP6776334B2 (en) | Excavator and control valve for excavator | |
| WO2015056423A1 (en) | Hydraulic drive system | |
| WO2015056421A1 (en) | Hydraulic drive system | |
| JP6282528B2 (en) | Construction machinery | |
| JP2011196439A (en) | Hydraulic circuit of turning working vehicle | |
| WO2018230642A1 (en) | Hydraulic system | |
| WO2016147597A1 (en) | Hydraulic drive system for construction machine | |
| WO2016092809A1 (en) | Hydraulic drive system for construction machinery | |
| JP5622243B2 (en) | Fluid pressure control circuit and work machine | |
| JP2010112494A (en) | Cavitation prevention circuit for working machine | |
| JP7029939B2 (en) | Construction machinery drive system | |
| JP2008002505A (en) | Energy saving device for construction machine | |
| WO2017164169A1 (en) | Shovel and control valve for shovel | |
| JP4933299B2 (en) | Hydraulic control equipment for construction machinery | |
| JPH0941427A (en) | Hydraulic working machine | |
| JP5334509B2 (en) | Hydraulic circuit for construction machinery | |
| KR101281232B1 (en) | Apparatus for controlling displacement of variable displacement type of hydraulic pump | |
| JP2010196781A (en) | Hydraulic control system | |
| JP6510910B2 (en) | Hydraulic drive | |
| JP2012092925A (en) | Hydraulic circuit and hydraulic shovel equipped with the same |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 14853317 Country of ref document: EP Kind code of ref document: A1 |
|
| NENP | Non-entry into the national phase |
Ref country code: DE |
|
| ENP | Entry into the national phase |
Ref document number: 201606886 Country of ref document: GB Kind code of ref document: A Free format text: PCT FILING DATE = 20141007 |
|
| 122 | Ep: pct application non-entry in european phase |
Ref document number: 14853317 Country of ref document: EP Kind code of ref document: A1 |