WO2013068156A2 - Verfahren zum kalibrieren eines mehrphasigen wechselrichters, vorrichtung zum betreiben, computerprogramm, computer-programmprodukt - Google Patents
Verfahren zum kalibrieren eines mehrphasigen wechselrichters, vorrichtung zum betreiben, computerprogramm, computer-programmprodukt Download PDFInfo
- Publication number
- WO2013068156A2 WO2013068156A2 PCT/EP2012/067960 EP2012067960W WO2013068156A2 WO 2013068156 A2 WO2013068156 A2 WO 2013068156A2 EP 2012067960 W EP2012067960 W EP 2012067960W WO 2013068156 A2 WO2013068156 A2 WO 2013068156A2
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- phase
- inverter
- current
- switching element
- phases
- Prior art date
Links
Classifications
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02M—APPARATUS FOR CONVERSION BETWEEN AC AND AC, BETWEEN AC AND DC, OR BETWEEN DC AND DC, AND FOR USE WITH MAINS OR SIMILAR POWER SUPPLY SYSTEMS; CONVERSION OF DC OR AC INPUT POWER INTO SURGE OUTPUT POWER; CONTROL OR REGULATION THEREOF
- H02M7/00—Conversion of ac power input into dc power output; Conversion of dc power input into ac power output
- H02M7/42—Conversion of dc power input into ac power output without possibility of reversal
- H02M7/44—Conversion of dc power input into ac power output without possibility of reversal by static converters
- H02M7/48—Conversion of dc power input into ac power output without possibility of reversal by static converters using discharge tubes with control electrode or semiconductor devices with control electrode
- H02M7/53—Conversion of dc power input into ac power output without possibility of reversal by static converters using discharge tubes with control electrode or semiconductor devices with control electrode using devices of a triode or transistor type requiring continuous application of a control signal
- H02M7/537—Conversion of dc power input into ac power output without possibility of reversal by static converters using discharge tubes with control electrode or semiconductor devices with control electrode using devices of a triode or transistor type requiring continuous application of a control signal using semiconductor devices only, e.g. single switched pulse inverters
- H02M7/5387—Conversion of dc power input into ac power output without possibility of reversal by static converters using discharge tubes with control electrode or semiconductor devices with control electrode using devices of a triode or transistor type requiring continuous application of a control signal using semiconductor devices only, e.g. single switched pulse inverters in a bridge configuration
- H02M7/53871—Conversion of dc power input into ac power output without possibility of reversal by static converters using discharge tubes with control electrode or semiconductor devices with control electrode using devices of a triode or transistor type requiring continuous application of a control signal using semiconductor devices only, e.g. single switched pulse inverters in a bridge configuration with automatic control of output voltage or current
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02P—CONTROL OR REGULATION OF ELECTRIC MOTORS, ELECTRIC GENERATORS OR DYNAMO-ELECTRIC CONVERTERS; CONTROLLING TRANSFORMERS, REACTORS OR CHOKE COILS
- H02P27/00—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage
- H02P27/04—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage
- H02P27/06—Arrangements or methods for the control of AC motors characterised by the kind of supply voltage using variable-frequency supply voltage, e.g. inverter or converter supply voltage using dc to ac converters or inverters
-
- H—ELECTRICITY
- H02—GENERATION; CONVERSION OR DISTRIBUTION OF ELECTRIC POWER
- H02M—APPARATUS FOR CONVERSION BETWEEN AC AND AC, BETWEEN AC AND DC, OR BETWEEN DC AND DC, AND FOR USE WITH MAINS OR SIMILAR POWER SUPPLY SYSTEMS; CONVERSION OF DC OR AC INPUT POWER INTO SURGE OUTPUT POWER; CONTROL OR REGULATION THEREOF
- H02M1/00—Details of apparatus for conversion
- H02M1/0003—Details of control, feedback or regulation circuits
- H02M1/0009—Devices or circuits for detecting current in a converter
Definitions
- the invention relates to a method for calibrating a multi-phase, in particular three-phase inverter, in particular one
- Pulse inverter one for each of its phases
- the invention relates to a device for operating such an inverter, as well as a computer program and a computer program product.
- inverters In order to control electrical machines, in particular for driving rotary field machines, inverters are provided which supply three phases of the electric machine, in particular in a star connection or delta connection. Usually, such inverters for each of the phases on a high-voltage side and a low-voltage side switching element, which are independently switchable and a
- At least two of the phases are associated with a current sensor which is connected downstream of the inverter to detect the current provided by the inverter. Errors in the measured currents lead on the one hand to errors in the calculated torques of the electrical machine and on the other hand to torque oscillations, which have a negative effect on a drive behavior of the electric machine.
- To the Accuracy of the current detection is often carried out a calibration of the inverter or its current sensor, wherein offset errors of the current sensor are usually detected in the de-energized state, ie when all the switching elements of the inverter are open and the electric machine is not rotating. The current is measured and then compensated with the measured value, an offset of the current sensor.
- the method according to the invention with the features of claim 1 has the advantage that amplification errors of the current measurement are reduced to an average value and in particular the differences in the amplification errors, which can have a negative effect on the current regulation, are compensated.
- the invention provides that (a) first all switching elements of the inverter are turned off or deactivated, (b) then a high-voltage side switching element of a first phase and a low-voltage side switching element of a second phase are turned on, (c) flowing through the first and second phases Currents are respectively measured by means of corresponding current sensors, (d) an average value is formed from the measured currents and (e) as a function of the thus determined average value of the inverters and in particular its
- step (b) it is preferably first checked before step (b) whether the current is equal to zero in all phases. If this is not the case, it is waited until the desired state is reached. This is done especially for inverters with only two phases.
- step (b) it is preferably provided that before step (b) it is first checked whether the current in at least the phase is equal to zero, which is not energized in step (b) or not should be energized. This ensures that no current flows through the third phase or the third strand in the subsequent energization of two phases or bars.
- the respective switching elements are only activated so short that a driven by the inverter electric machine generates no torque. This ensures that when performing the calibration, the electric machine generates no torque, which could for example act as drive torque to drive wheels of a motor vehicle, if the electric machine is provided as a drive unit of a vehicle or motor vehicle.
- a signal may also be output which causes a clutch located between the electric machine and a drive train to be opened, such that rotation of the clutch is released electric machine has no effect on the environment, in particular the drive system has.
- the device according to the invention for carrying out the method has a specially prepared control device which contains means for carrying out the method.
- the control unit has an electrical memory in which the method steps are stored as a control unit program.
- the computer program according to the invention provides that all steps of the method according to the invention are carried out when it is on a
- the computer program product according to the invention with a program code stored on a machine-readable carrier carries this
- the figure shows a schematic representation of an inverter 1, which is connected to an induction machine 2 for their operation.
- Rotary field machine 2 which is designed for example as an asynchronous machine, has three strands or phases I, II and III.
- the phases I, II and III are connected to each other, for example in a star connection.
- the inverter 1 has to control the phase I, II and III a
- the high-voltage side switching element ⁇ is a freewheeling diode D- ⁇ and the switching element ⁇ a freewheeling diode D 4 are each assigned in parallel.
- the bridge circuit has a high-voltage side switching element T 2 and a low-voltage side switching element T 5 for the phase II.
- the Switching element T 2 is a freewheeling diode D 2 and the switching element T 5 a freewheeling diode D5 respectively assigned in parallel.
- phase III These are a high voltage side
- Freewheeling diode D 6 assigned.
- the structure of the inverter 1 is basically known, so that will not be discussed in detail.
- Each phase I, II and II is further associated with a current sensor 3, 4 and 5, which detects the current flowing through the respective strand or through the respective phase I, II and III current.
- a control unit 6 the detected values are leaked, wherein the control unit 6 the
- Switching elements ⁇ to T 6 controls to the electric machine
- Calibration of the inverter 1 performed, which is used in particular for a correction of gain errors. For this purpose, it is first checked whether the current in all three phases I, II and III is equal to zero. For this purpose, first all switching elements ⁇ - T 6 are opened or deactivated. If a current continues to flow in one of the phases I, II and III, then it is waited until the current is also zero here. Subsequently, in the present embodiment, one high-side switch ⁇ of one phase and one low-side switching element T 5 of another phase III are turned on, while the four other switches T 2 , T 3 , T 4 and T 6 remain off. As a result, the same current (in different directions) must flow over two of the current sensors 3 and 4. For correction, it is now assumed that the amount of the real current corresponds to the mean of the amounts of the two measured currents.
- Amplification error of the individual sensors 3, 4 are reduced.
- the differences in the gain errors which have a particularly negative effect on the control, can be compensated. It is therefore easy to correct the gain.
- the correction of the non-linearity would be possible, in which case preferably at least one further measurement is carried out at a different current level for each further coefficient. In the following, only the correction of the gain will be described by way of example.
- m-iKor (miposKor + rninegKor) 2
- m2Kor (m2 osKor + rn2negKor) 2
- the respective transfer characteristic can be made up of two straight lines
- I a + m 1 poS Kor ⁇ b ⁇ x for x> 0 I
- the first index of the measured currents stands for the respective one
- the correction factor miposKor can be calculated as follows: The calculation for the other correction factors results accordingly.
- the current is usually also a torque of the
Landscapes
- Engineering & Computer Science (AREA)
- Power Engineering (AREA)
- Inverter Devices (AREA)
- Control Of Ac Motors In General (AREA)
Abstract
Die Erfindung betrifft ein Verfahren zum Kalibrieren eines mehrphasigen, insbesondere dreiphasigen Wechselrichters (1), der für jede seiner Phasen jeweils ein hochspannungsseitiges Schaltelement (T1, T2, T3) und jeweils ein niederspannungsseitiges Schaltelement (T4, T5, T6) sowie für zumindest einige der Phasen (I, II, III) jeweils einen Stromsensor aufweist. Es werden folgende Schritte vorgeschlagen: (f) Ausschalten aller Schaltelemente(T1-T6) (g) Einschalten eines hochspannungsseitigen Schaltelements (T1) einer ersten Phase (I) und eines niederspannungsseitigen Schaltelements (T5) einer zweiten Phase (II), (h) Messen der durch die erste (I) und die zweite Phase (II) fließenden Ströme, (i) Bilden eines Mittelwertes aus den gemessenen Strömen und (j) Kalibrieren des Wechselrichters (1) in Abhängigkeit des gebildeten Mittelwertes. Ferner betrifft die Erfindung eine Vorrichtung, ein Computerprogramm sowie ein Computer-Programmprodukt.
Description
Beschreibung Titel
Verfahren zum Kalibrieren eines mehrphasigen Wechselrichters, Vorrichtung zum Betreiben, Computerprogramm, Computer- Programmprodukt
Die Erfindung betrifft ein Verfahren zum Kalibrieren eines mehrphasigen, insbesondere drei-phasigen Wechselrichters, insbesondere eines
Pulswechselrichters, der für jede seiner Phasen jeweils ein
hochspannungsseitiges Schaltelement und jeweils ein niederspannungsseitiges Schaltelement sowie für zumindest zwei der Phasen jeweils einen Stromsensor aufweist.
Ferner betrifft die Erfindung eine Vorrichtung zum Betreiben eines derartigen Wechselrichters, sowie ein Computerprogramm und ein Computer- Programmprodukt.
Stand der Technik
Zum Ansteuern elektrischer Maschinen, insbesondere zum Ansteuern von Drehfeldmaschinen, werden Wechselrichter vorgesehen, die drei insbesondere in einer Sternschaltung oder Dreieckschaltung geschaltete Phasen der elektrischen Maschine mit Strom versorgen. Üblicherweise weisen derartige Wechselrichter für jede der Phasen ein hochspannungsseitiges und ein niederspannungsseitiges Schaltelement auf, die unabhängig voneinander schaltbar sind und eine
Brückenschaltung zum Ansteuern der elektrischen Maschine bilden.
Typischerweise ist zumindest zwei der Phasen ein Stromsensor zugeordnet, der dem Wechselrichter nachgeschaltet ist, um den durch den Wechselrichter bereitgestellten Strom zu erfassen. Fehler in den gemessenen Strömen führen zum einen zu Fehlern in den berechneten Drehmomenten der elektrischen Maschine und zum anderen auch zu Momentenschwingungen, die sich negativ auf ein Antriebsverhalten der elektrischen Maschine auswirken. Um die
Genauigkeit der Stromerfassung zu verbessern, wird häufig eine Kalibrierung des Wechselrichters beziehungsweise dessen Stromsensorik durchgeführt, wobei Offsetfehler der Stromsensorik üblicherweise im stromlosen Zustand erfasst werden, also wenn sämtliche Schaltelemente des Wechselrichters geöffnet sind und sich die elektrische Maschine nicht dreht. Dabei wird der Strom gemessen und dann mit dem gemessenen Wert ein Offset der Stromsensorik kompensiert.
Offenbarung der Erfindung
Das erfindungsgemäße Verfahren mit den Merkmalen des Anspruchs 1 hat den Vorteil, dass Verstärkungsfehler der Strommessung auf einen Mittelwert reduziert und insbesondere die Unterschiede in den Verstärkungsfehlern, die sich für die Stromregelung negativ auswirken können, kompensiert werden. Dazu ist erfindungsgemäß Vorgesehen, dass (a) zunächst alle Schaltelemente des Wechselrichters ausgeschaltet beziehungsweise deaktiviert werden, (b) anschließend ein hochspannungsseitiges Schaltelement einer ersten Phase und ein Niederspannungsseitiges Schaltelement einer zweiten Phase eingeschaltet werden, (c) die durch die ersten und zweiten Phase fließenden Ströme mittels entsprechender Stromsensoren jeweils gemessen werden, (d) aus den gemessenen Strömen ein Mittelwert gebildet und (e) in Abhängigkeit des so bestimmten Mittelwertes der Wechselrichter und insbesondere dessen
Stromsensorik kalibriert werden. Durch das Ausschalten aller Schaltelemente werden zunächst alle Phasen deaktiviert, so dass in keiner Phase ein Strom fließen sollte. Anschließend wird bei zwei Phasen jeweils ein Schaltelement, nämlich bei einer Phase ein hochspannungsseitiges und bei einer anderen Phase ein niederspannungsseitiges Schaltelement aktiviert, so dass die mindestens eine weitere, dritte Phase stromfrei bleibt. Die in den Phasen gemessenen Ströme, in welchen das jeweilige Schaltelement aktiviert wurde, werden zum Bilden eines Mittelwertes verwendet und in Abhängigkeit dieses Mittelwertes der Wechselrichter kalibriert. Insbesondere werden dadurch, wie bereits erwähnt, Verstärkungsfehler reduziert. Darüber hinaus wird dafür gesorgt, dass der verbleibende Verstärkungsfehler bei allen Stromsensoren gleich ist, wozu das Verfahren vorzugsweise für die übrigen Stromsensoren und Phasen wiederholt wird.
Vorzugsweise wird zur Kalibrierung davon ausgegangen, dass der Betrag eines realen Stroms des Wechselrichters, insbesondere der reale Strom der gemessenen Phasen, dem gebildeten Mittelwert der Beträge der gemessenen Ströme entspricht.
Weiterhin wird bevorzugt vor Schritt (b) zunächst geprüft, ob der Strom in allen Phasen gleich Null ist. Ist dies nicht der Fall, wird solange abgewartet, bis der gewünschte Zustand erreicht ist. Dies erfolgt insbesondere bei Wechselrichtern mit nur zwei Phasen.
Gemäß einer alternativen Ausführungsform, insbesondere bei Wechselrichtern mit drei oder mehr Phasen, ist bevorzugt vorgesehen, dass vor Schritt (b) zunächst geprüft wird, ob der Strom in zumindest der Phase gleich Null ist, die in Schritt (b) nicht bestromt wird beziehungsweise nicht bestromt werden soll. Damit ist sichergestellt, dass bei der folgenden Bestromung von zwei Phasen beziehungsweise Stängen kein Strom durch die dritte Phase beziehungsweise den dritten Strang fließt.
Zu einer vorteilhaften Weiterbildung der Erfindung ist vorgesehen, dass das Verfahren wiederholt wird bis alle möglichen Mittelwerte des
Wechselstromrichters erfasst wurden beziehungsweise alle möglichen
Kombinationen von Schaltelementeinschaltungen gemäß Schritt (b) durchgeführt wurden. Damit lassen sich die Unterschiede der Verstärkungsfehler, die sich auf die Regelung besonders negativ auswirken können, insgesamt kompensieren.
Besonders bevorzugt werden die jeweiligen Schaltelemente nur derart kurz angesteuert, dass eine durch den Wechselrichter angesteuerte elektrische Maschine kein Drehmoment erzeugt. Hierdurch wird gewährleistet, dass bei der Durchführung der Kalibrierung die elektrische Maschine kein Drehmoment erzeugt, welches sich beispielsweise als Antriebsdrehmoment an Antriebsrädern eines Kraftfahrzeugs auswirken könnte, sofern die elektrische Maschine als eine Antriebseinheit eines Fahrzeugs beziehungsweise Kraftfahrzeugs vorgesehen ist. Alternativ kann während der Kalibrierung auch ein Signal ausgegeben werden, das bewirkt, dass eine zwischen der elektrischen Maschine und einem Antriebsstrang befindliche Kupplung geöffnet wird, so dass eine Drehung der
elektrischen Maschine keine Auswirkung auf die Umwelt, insbesondere das Antriebssystem, hat.
Die erfindungsgemäße Vorrichtung zur Durchführung des Verfahrens weist ein speziell hergerichtetes Steuergerät auf, das Mittel zur Durchführung des Verfahrens enthält. Vorzugsweise weist das Steuergerät einen elektrischen Speicher auf, in welchem die Verfahrensschritte als Steuergerätprogramm abgelegt sind.
Das erfindungsgemäße Computerprogramm sieht vor, dass alle Schritte des erfindungsgemäßen Verfahrens ausgeführt werden, wenn es auf einem
Computer abläuft.
Das erfindungsgemäße Computer-Programmprodukt mit einem auf einem maschinelesbaren Träger gespeicherten Programmcode führt das
erfindungsgemäße Verfahren aus, wenn das Programm auf einem Computer abläuft.
Im Folgenden soll die Erfindung anhand der Zeichnungen näher erläutert werden. Dazu zeigt die einzige
Figur: einen drei-phasigen Wechselrichter zum Ansteuern einer
Drehfeldmaschine.
Die Figur zeigt in einer schematischen Darstellung einen Wechselrichter 1 , der an einer Drehfeldmaschine 2 zu deren Betrieb angeschlossen ist. Die
Drehfeldmaschine 2, die beispielsweise als Asynchronmaschine ausgebildet ist, weist drei Stränge beziehungsweise Phasen I, II und III auf. Die Phasen I, II und III sind beispielsweise in einer Sternschaltung miteinander verbunden. Der Wechselrichter 1 weist zur Ansteuerung der Phase I, II und III eine
Brückenschaltung auf. Diese weist für die Phase I ein hochspannungsseitiges Schaltelement ΤΊ sowie ein niederspannungsseitiges Schaltelement T4 auf. Dem hochspannungsseitigen Schaltelement ΤΊ ist dabei eine Freilaufdiode D-ι und dem Schaltelement ΤΊ eine Freilaufdiode D4 jeweils parallel zugeordnet. Weiterhin weist die Brückenschaltung ein hochspannungsseitiges Schaltelement T2 und ein niederspannungsseitiges Schaltelement T5für die Phase II auf. Dem
Schaltelement T2 ist dabei eine Freilaufdiode D2 und dem Schaltelement T5 eine Freilaufdiode D5 jeweils parallel zugeordnet. Entsprechend verhält es sich mit der Ansteuerung der Phase III. Dieser sind ein hochspannungsseitiges
Schaltelement T3 sowie eine parallel dazu geschaltete Freilaufdiode D3 und ein niederspannungsseitiges Schaltelement T6 sowie eine parallel dazu geschaltete
Freilaufdiode D6 zugeordnet. Der Aufbau des Wechselrichters 1 ist grundsätzlich bekannt, so dass hierauf nicht näher eingegangen werden soll.
Jeder Phase I, II und II ist weiterhin ein Stromsensor 3, 4 beziehungsweise 5 zugeordnet, der den durch den jeweiligen Strang beziehungsweise durch die jeweilige Phase I, II und III fließenden Strom erfasst. Einem Steuergerät 6 werden die erfassten Werte zugespielt, wobei das Steuergerät 6 die
Schaltelemente ΤΊ bis T6 ansteuert, um die elektrische Maschine
beziehungsweise Drehfeldmaschine 2 zu betreiben.
Im Idealfall sieht der Zusammenhang zwischen einem berechneten Strom I und einen gemessenen Stromwert x eines Analog-Digital-Wandlers, der als
Stromsensor dient, so aus: l(x)=bx, wobei b eine Verstärkung darstellt. In der Realität wird dieser Zusammenhang noch durch Offsetfehler,
Verstärkungsfehler und nicht Linearitäten der Stromsensorik, also insbesondere der Stromsensoren 3, 4 und 5, verfälscht, so dass der berechnete Strom I sich wie folgt bestimmt: l(x) = a+breai x+cx2 dx3, wobei x der Digitalwert des Analog- Digital-Wandlers ist, a ein Offset(fehler) ist, breai die reale Verstärkung bedeutet, die nicht der theoretischen Verstärkung b entspricht, und c und d
Nichtlinearitäten der Sensorik bedeuten. Wenn die Nichtlinearität nicht berücksichtigt wird, dann gilt: c = d = 0. Natürlich ist es aber auch denkbar, noch weitere Nichtlinearitäten zu berücksichtigen. Durch das im Folgenden beschriebene Verfahren wird eine vorteilhafte
Kalibrierung des Wechselrichters 1 durchgeführt, die insbesondere zu einer Korrektur von Verstärkungsfehlern dient. Dazu wird zunächst geprüft, ob der Strom in allen drei Phasen I, II und III gleich Null ist. Hierzu werden zunächst alle Schaltelemente ΤΊ - T6 geöffnet beziehungsweise deaktiviert. Fließt in einer der Phasen I, II und III weiterhin ein Strom, dann wird solange abgewartet bis auch hier der Strom gleich Null ist.
Anschließend wird in dem vorliegenden Ausführungsbeispiel jeweils ein hochspannungsseitiger Schalter ΤΊ einer Phase und ein niederspannungsseitiges Schaltelement T5 einer andere Phase III eingeschaltet, während die vier anderen Schalter T2, T3, T4 undT6 und ausgeschaltet beziehungsweise deaktiviert bleiben. Dadurch muss über zwei der Stromsensoren 3 und 4 der gleiche Strom (in unterschiedliche Richtung) fließen. Zur Korrektur wird nun davon ausgegangen, dass der Betrag des realen Stroms dem Mittelwert der Beträge der beiden gemessenen Ströme entspricht.
Damit kann zum einen der Verstärkungsfehler auf den Mittelwert der
Verstärkungsfehler der einzelnen Sensoren 3, 4 reduziert werden. Außerdem können die Unterschiede in den Verstärkungsfehlern, die sich für die Regelung besonders negativ auswirken, kompensiert werden. Es kann also in einfacher Weise die Verstärkung korrigiert werden. Mit weiteren Messungen wäre jedoch auch die Korrektur der Nichtlinearität möglich, wobei dann vorzugsweise für jeden weiteren Koeffizienten mindestens eine weitere Messung bei einem anderen Stromniveau durchgeführt wird. Im Folgenden wird beispielhaft nur die Korrektur der Verstärkung beschrieben.
Bezugnehmend auf das oben stehende Beispiel werden mittels der Sensoren 3 und 4 die Ströme \^\ und l2 der Phasen I und II gemessen, wobei \^\ = -100A und l2 = 1 10A ist. Hieraus ergeben sich die Korrekturfaktoren m1 poSKor und m2negKor Wie folgt: miposKor = (Ιι-Ι2)/(2·Ι1) « 1 ,05 und m2negKor = (Ι2-Ιι)/(2·Ι2) = 0,95
Anschließend werden die Schaltelemente T2 und T4 geschlossen, während die übrigen vier Schaltelemente T-i , T5, T3 und T6 geöffnet werden beziehungsweise bleiben. Als gemessene Ströme ergeben sich hierbei \^\ = -96A und l2 = 100A, wobei sich daraus Korrekturwerte wie folgt ergeben: mmegKor = (11 - 12)/(2 · 11 ) « 1 ,03 und
m2p0sKor = (Ιι-Ιι)/(2·Ι2) = 0,97
Es kann nun zum Beispiel entweder ein gemittelter Korrekturfaktor ermittelt werden: m-iKor = (miposKor + rninegKor) 2 m2Kor = (m2 osKor + rn2negKor) 2 öder es kann die jeweilige Übertragungskennlinie aus zwei Geraden
zusammengesetzt werden.
I = a+m1 poSKor · b · x für x > 0 I
I = a + m1 negKor · b · x für x < 0
Während das oben beschriebene Verfahren mit nur zwei Stromsensoren 3, 4 durchführbar ist, kann bei Verwendung von drei Stromsensoren 3, 4 und 5 jeder Sensor 3, 4 und 5 immer mit beiden anderen Sensoren 3, 4 und 5 verglichen werden. Dabei ergibt sich beispielsweise folgendes Schema:
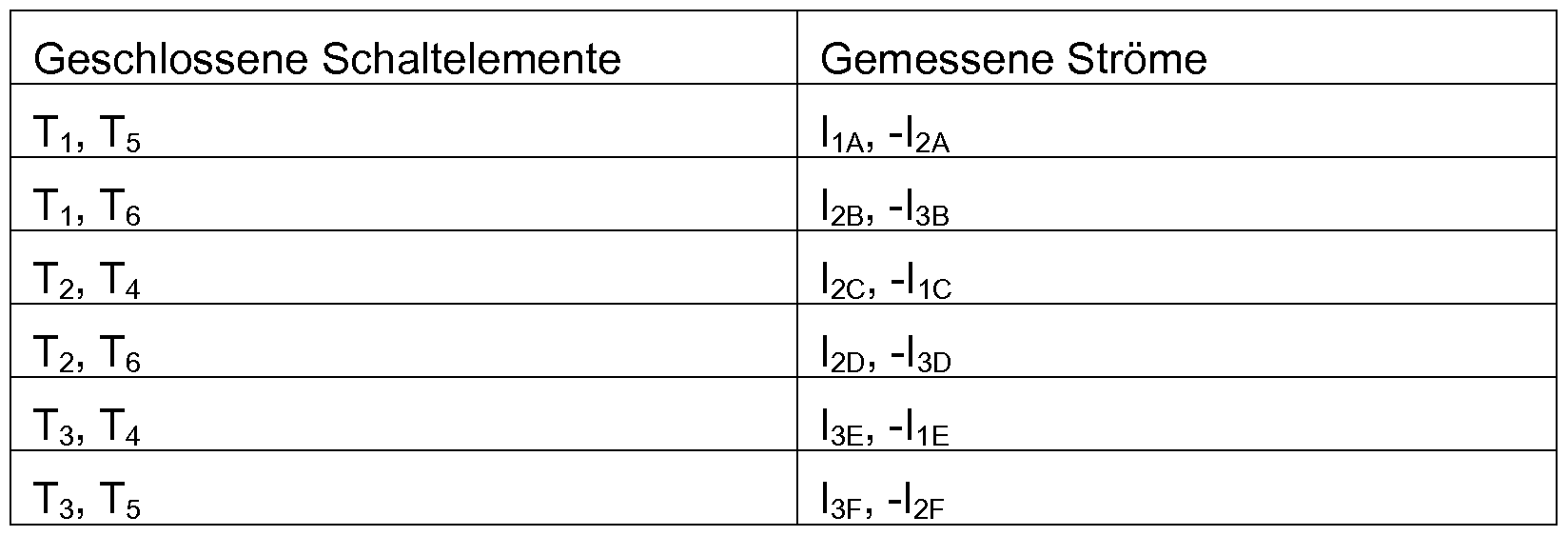
Der erste Index bei den gemessenen Strömen steht für den jeweiligen
Stromsensor beziehungsweise für die jeweilige Phase I, II oder III und der zweite Index für die jeweilige Messung. Damit kann zum Beispiel der Korrekturfaktor miposKor Wie folgt berechnet werden:
 Die Berechnung für die anderen Korrekturfaktoren ergibt sich entsprechend. Die Möglichkeit entweder die positiven oder negativen Korrekturfaktoren zu einem mittleren Korrekturfaktor zu ermitteln oder die Kennlinien in zwei Teilbereiche unterschiedlicher Steigung zu unterteilen besteht ebenso wie bei zwei Sensoren.
Die Berechnung für die anderen Korrekturfaktoren ergibt sich entsprechend. Die Möglichkeit entweder die positiven oder negativen Korrekturfaktoren zu einem mittleren Korrekturfaktor zu ermitteln oder die Kennlinien in zwei Teilbereiche unterschiedlicher Steigung zu unterteilen besteht ebenso wie bei zwei Sensoren.
Durch die Bestromung wird in der Regel auch ein Drehmoment der
Drehfeldmaschine 2 erzeugt. Daher ist vorgesehen, dass entweder eine
Kupplung zwischen der Drehfeldmaschine 2 und einem darauf folgenden Antriebsstrang geöffnet wird, so dass eine Drehung der Drehfeldmaschine 2 keine Auswirkungen auf den Antriebsstrang hat, oder die Stromimpulse werden durch entsprechendes Ansteuern der Schaltelemente ΤΊ bis T6 durch das Steuergerät 6 derart kurz gewählt, dass dadurch das aufgebrachte Drehmoment keine Auswirkungen, insbesondere keine ungewollte Beschleunigung, auf das Gesamtsystem, insbesondere eines die Drehfeldmaschine 2 aufweisenden Fahrzeugs entstehen.
Claims
1 . Verfahren zum Kalibrieren eines mehrphasigen, insbesondere dreiphasigen Wechselrichters (1 ), der für jede seiner Phasen (I, II, III) jeweils ein hochspannungsseitiges Schaltelement (T-i , T2, T3) und jeweils ein
niederspannungsseitiges Schaltelement (T4, T5, T6) sowie für zumindest einige der Phasen jeweils einen Stromsensor (3, 4, 5) aufweist,
gekennzeichnet durch folgende Schritte:
(a) Ausschalten aller Schaltelemente (T T6),
(b) Einschalten eines hochspannungsseitigen Schaltelements (ΤΊ) einer ersten Phase (I) und eines niederspannungsseitigen Schaltelements (T5) einer zweiten Phase (II),
(c) Messen der durch die erste (I) und die zweite Phase (II) fließenden
Ströme,
(d) Bilden eines Mittelwertes aus den gemessenen Strömen und
(e) Kalibrieren des Wechselrichters (1 ) in Abhängigkeit des gebildeten
Mittelwertes.
2. Verfahren nach Anspruch 1 , dadurch gekennzeichnet, dass zur
Kalibrierung angenommen wird, dass der Betrag eines realen Stroms des Wechselrichters (1 ) dem gebildeten Mittelwert der Beträge der gemessenen Ströme entspricht.
3. Verfahren nach einem der vorhergehenden Ansprüche, dadurch
gekennzeichnet, dass vor Schritt (b) zunächst geprüft wird, ob der Strom in allen Phasen gleich Null ist.
4. Verfahren nach einem der vorhergehenden Ansprüche, dadurch
gekennzeichnet, dass vor Schritt (b) zunächst geprüft wird, ob der Strom in zumindest der Phase gleich Null ist, die in Schritt (b) nicht bestromt wird.
5. Verfahren nach einem der vorhergehenden Ansprüche, dadurch gekennzeichnet, dass das Verfahren wiederholt wird, bis alle möglichen Mittelwerte des Wechselrichters (1 ) erfasst wurden.
6. Verfahren nach einem der vorhergehenden Ansprüche, dadurch
gekennzeichnet, dass die jeweiligen Schaltelemente (T T6) nur derart kurz angesteuert werden, dass eine durch den Wechselrichter (1 ) angesteuerte elektrische Maschine (2) kein Drehmoment erzeugt.
7. Vorrichtung zur Durchführung des Verfahrens nach einem der Ansprüche 1 bis 6, gekennzeichnet durch ein speziell hergerichtetes Steuergerät (6), das Mittel zur Durchführung des Verfahrens enthält.
8. Computerprogramm, das alle Schritte eines Verfahrens nach einem der Ansprüche 1 bis 6 ausführt, wenn das Programm auf einem Computer läuft.
9. Computer-Programmprodukt mit einem auf einem maschinenlesbaren
Träger gespeicherten Programmcode zur Durchführung des Verfahrens nach einem der Ansprüche 1 bis 6, wenn das Programm auf einem
Computer ausgeführt wird.
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| CN201280055417.7A CN104040869B (zh) | 2011-11-11 | 2012-09-13 | 用于校准多相逆变器的方法、用于运行的设备 |
| EP12770006.0A EP2777144B1 (de) | 2011-11-11 | 2012-09-13 | Verfahren zum kalibrieren eines mehrphasigen wechselrichters, vorrichtung zum betreiben, computerprogramm, computer-programmprodukt |
| US14/357,586 US9490727B2 (en) | 2011-11-11 | 2012-09-13 | Method for calibrating a multiphase inverter, operating apparatus, computer program, and computer program product |
Applications Claiming Priority (2)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| DE102011086177.7 | 2011-11-11 | ||
| DE102011086177A DE102011086177A1 (de) | 2011-11-11 | 2011-11-11 | Verfahren zum Kalibrieren eines mehrphasigen Wechselrichters, Vorrichtung zum Betreiben, Computerprogramm, Computer-Programmprodukt |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| WO2013068156A2 true WO2013068156A2 (de) | 2013-05-16 |
| WO2013068156A3 WO2013068156A3 (de) | 2013-08-29 |
Family
ID=47010524
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/EP2012/067960 WO2013068156A2 (de) | 2011-11-11 | 2012-09-13 | Verfahren zum kalibrieren eines mehrphasigen wechselrichters, vorrichtung zum betreiben, computerprogramm, computer-programmprodukt |
Country Status (5)
| Country | Link |
|---|---|
| US (1) | US9490727B2 (de) |
| EP (1) | EP2777144B1 (de) |
| CN (1) | CN104040869B (de) |
| DE (1) | DE102011086177A1 (de) |
| WO (1) | WO2013068156A2 (de) |
Families Citing this family (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| DE102011076722B4 (de) * | 2011-05-30 | 2019-11-07 | Robert Bosch Gmbh | Verfahren zur Stromermittlung in einer mehrphasigen Maschine |
Family Cites Families (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| CN1029898C (zh) * | 1992-01-24 | 1995-09-27 | 株式会社东芝 | 用于控制逆变器的方法和装置 |
| US6148052A (en) * | 1997-12-10 | 2000-11-14 | Nortel Networks Corporation | Digital phase detector with ring oscillator capture and inverter delay calibration |
| US6111767A (en) * | 1998-06-22 | 2000-08-29 | Heliotronics, Inc. | Inverter integrated instrumentation having a current-voltage curve tracer |
| US6172509B1 (en) * | 1999-02-11 | 2001-01-09 | The United States Of America As Represented By The Secretary Of The Air Force | Detecting polyphase machine faults via current deviation |
| JP4913661B2 (ja) * | 2007-04-26 | 2012-04-11 | ルネサスエレクトロニクス株式会社 | インバータ装置及びそれに用いられる半導体装置。 |
| DE102008040144A1 (de) * | 2008-07-03 | 2010-01-07 | Robert Bosch Gmbh | Verfahren und Vorrichtung zur Optimierung einer Raumzeigerpulsweitenmodulation |
-
2011
- 2011-11-11 DE DE102011086177A patent/DE102011086177A1/de not_active Withdrawn
-
2012
- 2012-09-13 WO PCT/EP2012/067960 patent/WO2013068156A2/de active Application Filing
- 2012-09-13 EP EP12770006.0A patent/EP2777144B1/de active Active
- 2012-09-13 US US14/357,586 patent/US9490727B2/en active Active
- 2012-09-13 CN CN201280055417.7A patent/CN104040869B/zh active Active
Non-Patent Citations (1)
| Title |
|---|
| None |
Also Published As
| Publication number | Publication date |
|---|---|
| US9490727B2 (en) | 2016-11-08 |
| CN104040869A (zh) | 2014-09-10 |
| CN104040869B (zh) | 2017-09-22 |
| DE102011086177A1 (de) | 2013-05-16 |
| US20140340017A1 (en) | 2014-11-20 |
| EP2777144B1 (de) | 2018-01-10 |
| WO2013068156A3 (de) | 2013-08-29 |
| EP2777144A2 (de) | 2014-09-17 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP3296701A1 (de) | Sensorvorrichtung zur bestimmung der position des rotors einer elektrischen maschine und steuervorrichtung fuer einen elektromotor | |
| WO2011057838A1 (de) | Verfahren zum plausibilisieren des drehmomentes einer elektrischen maschine und maschinenregler zur regelung einer elektrischen maschine und zur durchführung des verfahrens | |
| AT508854B1 (de) | Verfahren zur mechanisch sensorlosen regelung einer drehstrommaschine | |
| WO2012103993A1 (de) | Verfahren und vorrichtung zum kalibrieren mindestens eines stromsensors | |
| DE102012215960A1 (de) | Steuereinrichtung und Verfahren zum Ermitteln des Rotorwinkels einer Synchronmaschine | |
| DE102012215962A1 (de) | Steuereinrichtung und Verfahren zum Ermitteln des Rotorwinkels einer Synchronmaschine | |
| EP2725331B1 (de) | Verfahren und Vorrichtung zum Bestimmen einer Betriebstemperatur eines Elektromotors | |
| DE102013224243A1 (de) | Verfahren und Vorrichtung zum Bestimmen einer Stellungsangabe eines Läufers einer elektrischen Maschine | |
| DE112013003953T5 (de) | Automatisierte Motoranpassung | |
| EP2474090B1 (de) | Verfahren und vorrichtung zur bestimmung einer rotorlage einer synchronmaschine | |
| DE112008000522T5 (de) | Bestimmung des von einem Motor gezogenen Durchschnittsstroms | |
| WO2013068156A2 (de) | Verfahren zum kalibrieren eines mehrphasigen wechselrichters, vorrichtung zum betreiben, computerprogramm, computer-programmprodukt | |
| WO2007090760A2 (de) | Verfahren und vorrichtung zum bestimmen des drehmoments einer elektrischen maschine | |
| DE102013204382A1 (de) | Steuereinrichtung und Verfahren zum Ansteuern einer Drehfeldmaschine | |
| AT511134A2 (de) | Verfahren zur Regelung des Drehmoments einer Asynchronmaschine | |
| DE102014106716B4 (de) | Steuervorrichtung einer drehenden elektrischen Maschine mit einer Abnormalitätserfassungsfunktion | |
| EP2284544B1 (de) | Verfahren und Vorrichtung zur sensorlosen Drehzahlmessung eines Elektromotors | |
| EP3320613A1 (de) | Betrieb einer rotierenden elektrischen maschine mit zwei positionssensoren | |
| DE102019130180A1 (de) | Verfahren zum Bestimmen eines Offsets eines Winkellagegebers an einer Rotorwelle einer elektrischen Synchronmaschine mit einem Strom- oder Spannungstimingoffsets eines Inverters | |
| DE102019111146A1 (de) | Verfahren zum Bestimmen eines Offsets eines Winkellagegebers an einer Rotorwelle einer elektrischen Maschine | |
| DE102018128346A1 (de) | Motorantriebsvorrichtung mit stromdetektor | |
| DE102011080442A1 (de) | Verfahren zum Betrieb einer Drehfeldmaschine | |
| EP3014756A1 (de) | Verfahren zur erkennung einer winkelfehlstellung eines elektrischen motors | |
| EP4016835A1 (de) | Verfahren zur bestimmung der winkellage des rotors eines von einem wechselrichter gespeisten synchronmotors und eine vorrichtung zur durchführung des verfahrens | |
| EP2363948B1 (de) | Verfahren zur Ermittlung der elektrischen Ständerdrehfeldfrequenz und/oder der Drehrichtung des Ständerdrehfeldes einer Synchron- oder Asynchronmaschine sowie zugehörige Vorrichtung und Synchron- oder Asynchronmaschine |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| WWE | Wipo information: entry into national phase |
Ref document number: 2012770006 Country of ref document: EP |
|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application |
Ref document number: 12770006 Country of ref document: EP Kind code of ref document: A2 |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 14357586 Country of ref document: US |