WO2002047324A2 - Network device interface for digitally interfacing data channels to a controller via a network - Google Patents
Network device interface for digitally interfacing data channels to a controller via a network Download PDFInfo
- Publication number
- WO2002047324A2 WO2002047324A2 PCT/US2001/044144 US0144144W WO0247324A2 WO 2002047324 A2 WO2002047324 A2 WO 2002047324A2 US 0144144 W US0144144 W US 0144144W WO 0247324 A2 WO0247324 A2 WO 0247324A2
- Authority
- WO
- WIPO (PCT)
- Prior art keywords
- data
- network device
- device interface
- data channel
- message
- Prior art date
Links
- 238000000034 method Methods 0.000 claims abstract description 69
- 238000004891 communication Methods 0.000 claims abstract description 43
- 230000001360 synchronised effect Effects 0.000 claims description 112
- 230000006870 function Effects 0.000 claims description 37
- 230000007704 transition Effects 0.000 claims description 37
- 230000005540 biological transmission Effects 0.000 claims description 21
- 230000004044 response Effects 0.000 claims description 18
- 230000004075 alteration Effects 0.000 claims 3
- KRTSDMXIXPKRQR-AATRIKPKSA-N monocrotophos Chemical compound CNC(=O)\C=C(/C)OP(=O)(OC)OC KRTSDMXIXPKRQR-AATRIKPKSA-N 0.000 claims 1
- 230000003750 conditioning effect Effects 0.000 description 18
- 238000010586 diagram Methods 0.000 description 17
- 230000008901 benefit Effects 0.000 description 11
- 238000006243 chemical reaction Methods 0.000 description 10
- 238000012544 monitoring process Methods 0.000 description 9
- 230000009471 action Effects 0.000 description 8
- 230000008859 change Effects 0.000 description 8
- 238000005259 measurement Methods 0.000 description 8
- 230000008569 process Effects 0.000 description 8
- 239000003990 capacitor Substances 0.000 description 5
- 238000012360 testing method Methods 0.000 description 5
- 238000012546 transfer Methods 0.000 description 5
- 230000015556 catabolic process Effects 0.000 description 4
- 238000006731 degradation reaction Methods 0.000 description 4
- 230000001133 acceleration Effects 0.000 description 3
- 230000000630 rising effect Effects 0.000 description 3
- 238000013519 translation Methods 0.000 description 3
- 238000005260 corrosion Methods 0.000 description 2
- 230000007797 corrosion Effects 0.000 description 2
- 238000011161 development Methods 0.000 description 2
- 238000012986 modification Methods 0.000 description 2
- 230000004048 modification Effects 0.000 description 2
- 238000005070 sampling Methods 0.000 description 2
- 235000015429 Mirabilis expansa Nutrition 0.000 description 1
- 244000294411 Mirabilis expansa Species 0.000 description 1
- 210000001015 abdomen Anatomy 0.000 description 1
- 238000004458 analytical method Methods 0.000 description 1
- 239000000872 buffer Substances 0.000 description 1
- 230000000694 effects Effects 0.000 description 1
- 230000008030 elimination Effects 0.000 description 1
- 238000003379 elimination reaction Methods 0.000 description 1
- 230000005284 excitation Effects 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 235000013536 miso Nutrition 0.000 description 1
- 230000006855 networking Effects 0.000 description 1
- 238000011084 recovery Methods 0.000 description 1
- 238000011160 research Methods 0.000 description 1
- 230000001960 triggered effect Effects 0.000 description 1
Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L12/00—Data switching networks
- H04L12/28—Data switching networks characterised by path configuration, e.g. LAN [Local Area Networks] or WAN [Wide Area Networks]
- H04L12/40—Bus networks
- H04L12/40006—Architecture of a communication node
- H04L12/40032—Details regarding a bus interface enhancer
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L12/00—Data switching networks
- H04L12/28—Data switching networks characterised by path configuration, e.g. LAN [Local Area Networks] or WAN [Wide Area Networks]
- H04L12/40—Bus networks
- H04L12/407—Bus networks with decentralised control
- H04L12/413—Bus networks with decentralised control with random access, e.g. carrier-sense multiple-access with collision detection [CSMA-CD]
- H04L12/4135—Bus networks with decentralised control with random access, e.g. carrier-sense multiple-access with collision detection [CSMA-CD] using bit-wise arbitration
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L25/00—Baseband systems
- H04L25/38—Synchronous or start-stop systems, e.g. for Baudot code
- H04L25/40—Transmitting circuits; Receiving circuits
- H04L25/49—Transmitting circuits; Receiving circuits using code conversion at the transmitter; using predistortion; using insertion of idle bits for obtaining a desired frequency spectrum; using three or more amplitude levels ; Baseband coding techniques specific to data transmission systems
- H04L25/4904—Transmitting circuits; Receiving circuits using code conversion at the transmitter; using predistortion; using insertion of idle bits for obtaining a desired frequency spectrum; using three or more amplitude levels ; Baseband coding techniques specific to data transmission systems using self-synchronising codes, e.g. split-phase codes
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L12/00—Data switching networks
- H04L12/28—Data switching networks characterised by path configuration, e.g. LAN [Local Area Networks] or WAN [Wide Area Networks]
- H04L12/40—Bus networks
- H04L2012/40208—Bus networks characterized by the use of a particular bus standard
- H04L2012/40215—Controller Area Network CAN
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L12/00—Data switching networks
- H04L12/28—Data switching networks characterised by path configuration, e.g. LAN [Local Area Networks] or WAN [Wide Area Networks]
- H04L12/40—Bus networks
- H04L2012/40267—Bus for use in transportation systems
- H04L2012/4028—Bus for use in transportation systems the transportation system being an aircraft
Definitions
- the present invention relates generally to network device interface and, more particularly, to an apparatus and method for digitally interfacing data channels with a controller over a common network bus.
- monitoring systems are used to assess either possible system failures or the affects of environment and other external forces on an object of interest.
- monitoring systems are employed to monitor parameters, such as strains, acceleration, pressures, corrosion, and temperatures at various critical structural locations on aircraft.
- such monitoring systems could be used in the automobile industry to control and monitor everything from on/off occupant controls to drive-train controls and multimedia systems.
- Many of these conventional monitoring systems use a plurality of remote devices, such as sensors, actuators, and subsystems that are placed about the object being monitored at the critical locations. Further, many of these conventional monitoring systems include either one or several controllers connected to each of the remote devices for receiving data from the remote devices and sending commands to the remote devices. During operation, the controllers acquire data from the various sensors. The controllers also activate the actuators to perform functions on the object.
- these conventional monitoring systems provide a way to monitor critical structures of an object, they do have some drawbacks. For example, many of the conventional monitoring systems use dedicated wiring and signal conditioning to connect each of the remote devices to the controller. Additionally, many of the remote devices are typically analog, and data received from the remote devices is typically in analog form.
- the complexity of the network may make many conventional monitoring systems impractical for a number of reasons.
- the dedicated wiring and signal conditioning can be expensive, bulky, heavy and hard to install and maintain. This is especially critical in aircraft applications, where weight and size concerns are at the forefront.
- the added wiring may add weight and cost to the car.
- many conventional monitoring systems transmit data in an analog format.
- analog signals are susceptible to noise introduced into the signals during data transmission. Given that many of the transmitted signals have a low amplitude to start with, this noise can corrupt the signal and decrease the signal to noise ratio levels that cause loss of resolution in the signal.
- the electrical lines connecting the remote devices to the controller may be sufficiently long to cause signal degradation due to DC resistance in the wiring. In light of this, it would be advantageous to replace the dedicated wiring and the analog transmission with a common bus and use digital transmission of data.
- many conventional digital networks suffer from a variety of problems themselves. For example, many existing digital networks demand complicated protocols requiring processors and, thus, forcing unacceptably large or costly remote devices.
- Processor based sensing devices may also have problems taking samples of analog data, or causing an actuator to take an action, at exactly the right time.
- Complicated protocols also introduce overhead into the messages on the bus that are not necessary for data acquisition and control. This overhead can severely limit the number of data samples that can be transmitted on the bus.
- These networks also have other problems. For example, they generally do not support both acquisition and control, and they typically only support short network lengths. Further, these conventional networks typically have bulky network device interfaces, slow network data rates, or a low network device count. Additionally, many computer systems that include digital networks do not operate in a time-deterministic manner. These computer systems generally lack the capability to schedule a trigger command to the network components that repeats or is interpreted and executed with any precision timing.
- the network system would also advantageously operate without the use of a microcontroller or processor for the network devices. Also, the network system would support both acquisition and control, and be capable of acquiring or converting data simultaneously from the networked components. Further, the network system would allow for high component counts, longer network lines and insure time determinism in a precise manner.
- the first network object to be defined is the bus controller.
- the bus controller is network device that sends commands on the network bus. All other devices on the network listen to the bus controller and take actions based on the commands of the bus controller.
- a network device is any device on the network that is not a bus controller.
- a network device is often referred to as a remote device throughout this disclosure.
- a Network Device Interface is a component of a network device. An NDI listens to the bus controller and any other traffic on the bus, and depending on the traffic on the network bus, performs an action or causes the network device to perform an action. Most NDIs will be connected to atleast one or more data channels.
- a data channel is a sensor, an actuator, a sensor and signal conditioning, an actuator and signal conditioning, or other analog or digital system.
- a data channel is a component of or is connected to the network device.
- the present invention remedies these and other problems by providing a network device interface (NDI) for connecting various data channels, such as sensors, actuators, and subsystems, to a common controller for transmission of commands and data to and from the data channels and the controller.
- NDI device of the present invention connects various data channels to the controller via a common network, thereby permitting the various data channels to share the same wiring for communicating with the controller.
- the NDI of the present invention can interface to different types of data channels, which can be analog-to-digital or digital-to-analog or other. Sensors are connected to the NDI as analog-to-digital data channels and actuators are connected to the NDI as digital-to- analog data channels.
- the NDI of the present invention is capabl e of taking the digital data from an analog-to-digital channel, formatting it according to the proper protocol, and transmitting it onto the network according to the protocol.
- the NDI of the present invention is also capable of taking digital data from the network, providing it as digital data to a Digital-to-Analog converter (D/A), and causing the D/A to convert the data to an analog signal.
- D/A Digital-to-Analog converter
- the NDI device of the present invention operates in conjunction with a data protocol that allows the controller to communicate with either one or several network devices at a time across the network.
- the data protocol used by the NDI device of the present invention has a fixed, low-level instruction set. Due to the simplicity of the protocol, the NDI device of the present invention is not required to be a high-level processor. Instead, in one preferred embodiment, the NDI device of the present invention is a state machine implemented as an Application Specific Integrated Circuit (ASIC).
- ASIC Application Specific Integrated Circuit
- the present invention provides a network device interface capable of communicating commands and data between a controller and a data channel using either synchronous or asynchronous communication.
- the NDI device includes a receiver for receiving messages from the controller via the common digital bus.
- the NDI device of this embodiment further includes an interface for providing commands to the associated data channel in response to messages received by the receiver and for receiving data from the associated data channel.
- the NDI device includes a transmitter for transmitting messages to the controller via the common digital bus.
- the NDI device further includes a synchronous network bus clock detector.
- the clock detector of the NDI device of the present invention determines whether a clock signal accompanies the data from the controller. If a clock signal is present, then the controUer is communicating in synchronous mode. In this instance, the NDI device uses the clock signal to provide commands and data to and receive data from the data channel. Further, the transmitter of the NDI device of the present invention uses the bus clock signal to transmit data to the controller.
- the NDI device determines that the bus controller is operating in the asynchronous mode. In this instance, the NDI device provides commands and data to and receives data from the data channel in an asynchronous mode independent of a bus clock. Further, the transmitter of the NDI device of the present invention transmits data to the controller asynchronously independent of a bus clock in the synchronous mode.
- the controller provides synchronous clock signals via a common clock bus.
- the clock detector of the present invention receives the synchronous clock signals and analyses the signals to determine whether it is being sent at the same rate as the data bits. If so, the clock detector of the network device interface determines that the controller is operating in the synchronous mode.
- the network device interface of the present invention may further include a bit rate detector connected to the common digital bus.
- the controller if the controller is operating in an asynchronous mode, the controller is transmitting commands and data at a certain bit rate.
- the bit rate detector of the present invention detects the bit rate, and the NDI device uses this bit rate to send commands and data to the data channel and receive data from the data channel. Further, the transmitter of the present invention uses the detected bit rate to transmit data back to the controller.
- the controller may also alter the bit rate during communication.
- the controller may initially transmit a first message to a data channel at a predetermined bit rate.
- the clock detector will not detect a synchronous clock signal, but the bit rate detector will detect the first bit rate at which the message is transmitted by the controller.
- the network device interface of the present invention uses this bit rate to send commands and data to the data channel and receive data from the data channel. Further, the transmitter of the present invention uses the detected first bit rate to transmit data back to the controller.
- the controller may alter the bit rate and send a second message at a second bit rate.
- the bit rate detector of the NDI device will detect the second bit rate at which the message is transmitted by the controller. Based on this second bit rate, the NDI device of the present invention uses this bit rate to receive commands and arguments from the bus controller and send data back to the bus controller.
- the controller may send an example message at an altered bit rate from the bit rate previously used for sending commands and data.
- the bit rate detector of the NDI device detects the change in bit rate and the transmitter of the NDI device transmits data back to the controller at the new bit rate thereby, signifying that the bit rate has been altered.
- the controller may send a baud select command that defines the bit rate at which messages are to be transmitted.
- the NDI device of the present invention operates in conjunction with a protocol.
- the protocol uses a plurality of different addresses to address either one or several data channels at the same time.
- the protocol uses a logical address to address an individual data channel, a group address to address a number of data channels, and a global address to address all data channels at the same time.
- the logical and group masks are stored in a memory device associated with the NDI device of the present invention.
- the group masks are an efficient way for the NDI device to store a list of group addresses for each channel.
- a group mask is constructed that comprises a plurality of bits for each data channel.
- Each bit of the mask is associated with a respective group and has a first state indicating that the respective data channel is a member of the group and a second state indicating that the respective data channel is a nonmember of the group.
- the mask is also stored in the memory associated with the network device interface.
- a command or data whenever a command or data is sent it will include either a logical, group, or global address. For each command or data message that is sent, the address associated with the message is analyzed by the NDI device. If the address is global, the NDI device will implement the command. Likewise, if the address is logical and corresponds to the logical address of a data channel associated with the NDI device, the NDI device will implement the command. If the address is a group address, the NDI device of the present invention will determine if a data channel associated with NDI device is a member of the group defined by the group address by analyzing the mask associated with the respective data channel. The network device interface will only implement the command if the data channel is a member of the group having the group address.
- the NDI device of the present invention is capable of operating in either a synchronous or asynchronous mode. Further, the controller is capable of providing a group address to send a command to a plurality of data channels at the same time.
- a problem arises, however, when the NDI devices connected to each data channel are operating in asynchronous mode, in that it is difficult to synchronize them such that they apply the command associated with the group address at the same time to the respective data channels connected to them.
- the NDI devices can be synchronized, even though they are operating in asynchronous mode.
- the controller transmits a command to a plurality of data channels, wherein the command comprises a plurality of bits having a value defined by a transition between first and second states.
- each of the NDI devices of the present invention commences implementation of the command at the same predetermined time relative to the transition that defines the value of a respective bit of the command such that the plurality of network device interfaces perform the command simultaneously in a time- deterministic manner.
- the controller transmits a command comprising a sync portion, a message body and a parity bit.
- the NDI devices of the present invention commence performance of the command coincident with the transition that defines the value of the parity bit.
- the controller transmits a command comprising a start bit, a command field, an address filed having an unused last bit set to 0, and a stop bit set 1.
- the NDI devices of the present invention commence performance of the function at each data channel coincident with the transition from the unused bit of the address field to the stop bit.
- the controller transmits a synchronous clock signal on the common digital bus.
- the NDI device of the present invention may also provide for synchronous implementation of commands between several network device interfaces by using the synchronous clock signal.
- the controller transmits a command to a plurality of data channels, where the message comprises a plurality of bits having a value defined by a transition between first and second states. Further, the controller transmits a synchronous clock signal comprised of a plurality of clock pulses from the controUer to the plurality of data channels simultaneous with the message.
- the plurality of the network device interfaces will commence performance of the command at the same predetermined time as defined by a respective clock pulse which, in turn, is defined based upon a predetermined relationship to a respective bit of the message.
- the network device interfaces co mmence performance in synchronization with the first clock pulse following the respective bit of the message.
- the message transmitted has a plurality of bits having a value defined by a transition between a first state and a second state and the message defines a sync portion, a message body and a parity bit.
- the network device interfaces commence performance of the command at the same predetermined time as defined by a respective clock pulse which is, in turn, defined based upon a predetermined relationship to the transition that defines the value of the parity bit of the message.
- the NDI device of the present invention operates in conjunction with a protocol that has a fixed, low-level instruction set that, in turn, allows in some case for use of simplified controllers and network device interfaces on network devices.
- the present invention provides a protocol stored on a computer-readable medium.
- the protocol is used for transmitting commands and data between a controller and a network device interface across a common digital network.
- the protocol includes at least one of a command and a data structure for sending respective commands and arguments to data channels.
- the data structure is also used to send data from data channels to the bus controUer.
- the present invention also provides a serial, multiplexed communication system that uses state machines.
- the communication system of the present invention includes a controller for issuing a plurality of commands and a plurality of data channels for performing predefined functions in response to the commands. Connecting the controller and network device interface is a common digital bus for supporting communication therebetween. Further, the communication system includes a plurality of network device interfaces, one of which is associated with each data channel for interconnecting the respective data channels with the common digital bus.
- each network device interface comprises a state machine and is independent of a processor.
- the controller provides a synchronous clock signal across the network bus to the network device interfaces.
- the synchronous clock is used as the clock signal for transmitting data.
- some A/D and D/A converters, as well as some signal conditioning devices cannot operate at the clock speed set by the synchronous clock.
- the network device interface of the present invention may include a clock divider.
- the clock divider may either be connected to the synchronous clock signal output by the controller or it may be connected to a local oscillator.
- a bus controller sending a synchronous clock signal and commands to the network devices at one frequency, and NDI devices listening to the synchronous clock and data from the bus controller.
- the NDI devices are converting the data and commands from the bus controller into the proper format expected by the data channels connected to the NDI devices, and the NDI devices are simultaneously providing the divided second clock signal to data channels, such that the data channels operate in accordance with the second clock signal frequency to convert data while the controller and NDI devices operates in accordance with a first clock frequency to send commands and data over the network bus.
- the NDI device of the present invention further includes a method for synchronizing the dividers associated with each NDI device with those of all other NDI devices connected to the common digital bus. Specifically, as stated previously, in some embodiments, the controller will send a group address so that a command is performed on a plurality of data channels at the same time. In order for this to occur, however, all of the clock dividers provided to data channels that use the divided clock located at each NDI device must be synchronized. In light of this, in one embodiment, the controller sends a first clock signal across the common digital bus.
- controller commands each of the dividers to synchronize the transmission of their respective second clock signals with an edge of the first clock signal such that individual second clock signals provided by each of the dividers is synchronized with respect to the first clock signal to thereby synchronize each of the converters.
- the network device interface of the present invention may include a special feature used to provide the specialized commands for the converter. This feature is called command translation.
- the NDI device of the present invention receives commands and data from the controller in accordance with a first set of commands and converts the command in accordance with a second set of commands for application to the converter. Further, the NDI device of the present invention may send data received from the converter across the common digital bus in accordance with the first set of commands.
- the preferred protocol for the NDI devices uses Manchester encoding of network data bits to help allow miniaturization of the NDI devices. It must be understood that for any device to receive asynchronous serial data, it must be able to acquire the timing of the data sequence from the serial data stream. Normally, the receiver of the serial asynchronous data must have a local oscillator to cause its receiver to operate, and recover the timing information from the serial data. Once the timing information has been extracted, the asynchronous receiver is able to receive serial data at certain rates, plus or minus a certain deviation from these rates, given this local oscillator frequency. Manchester encoding of serial data causes a transition from high to low or low to high in the center of every bit. This makes it easy to extract the necessary timing information from the serial data stream.
- Figure 1 is a block diagram of a networked system for transmitting commands and data digitally between a controller and a plurality of data channels via a network bus according to one embodiment of the present invention.
- Figure 2 is a block diagram of the operations preformed to transmit commands and data digitally between a controller and a plurality of data channels via a network bus according to one embodiment of the present invention.
- Figures 3 A and 3B are generalized block diagrams of a NDI device for digitally communicating commands and data between data channels and a controller across a network bus according to one embodiment of the present invention.
- Figure 4 is a block diagram of the operations performed by the NDI to retrieve data from a remote devices and illustrates the ability of the NDI device to perform multiple tasks at the same time while simultaneously communicating with the bus controller according to one embodiment of the present invention.
- Figure 5 is a block diagram of the operations performed to translate commands sent by a controller to a remote device into specialized commands used by a converter connected to the NDI, such that the controller may communicate with the remote device according to one embodiment of the present invention.
- Figure 6 is a block diagram of the operations performed to determine whether a controller is operating in either a synchronous or asynchronous mode according to one embodiment of the present invention.
- Figure 7 is a block diagram of the operations performed to determine the bit rate at which a controller is transmitting commands and data according to one embodiment of the present invention.
- Figure 8 is a block diagram of the operations performed by an NDI while the bus controUer is assigning logical addresses and group addresses to the network device according to one embodiment of the present invention.
- Figure 9 is graphic diagram illustrating the synchronization of an internal free running clock provided by the NDI device to a data channel in order to synchronize the free running clocks of multiple data channels attached to the network through multiple NDI devices according to one embodiment of the present invention.
- Figure 10 is a schematic diagram of an electrical network system according to one embodiment of the present invention implemented in an aircraft.
- Figure 11 A is a block diagram of the connection of the NDI device of the present invention to a successive approximation A/D that uses a convert signal from the NDI device to acquire data with precise timing, according to one embodiment of the present invention.
- Figure 1 IB is a block diagram of the connection of the NDI device of the present invention to a digital filter and decimator and a sigma/delta A D that uses the synchronized divided clock and possibly the synchronize signal to acquire data with precise timing, according to one embodiment of the present invention.
- Figure 1 IC is a block diagram of the connection of the NDI device of the present invention to a successive approximation A/D and signal conditioning with switched capacitor filters, where the switched capacitor filters require both the convert and divided clock signals to acquire data with precise timing, according to one embodiment of the present invention.
- the present invention r emedies these and other problems by providing a network device interface (NDI) for connecting various data channels, that can be sensors, actuators, and subsystems, to a common controller for transmission of commands and data to and from the data channels and the controller.
- NDI network device interface
- the NDI device of the present invention connects various remote devices to the controller via a common network, thereby permitting the various remote devices to share the same wiring for communicating with the controller.
- the NDI of the present invention can interface to different types of data channels, which can be analog-to-digital or digital-to-analog or other.
- the NDI of the present invention is capable of taking the digital data from an analog-to-digital channel, formatting it according to the proper protocol, and transmitting it onto the network according to the protocol.
- the NDI of the present invention is also capable of taking digital data from the network, providing it as digital data to a Digital-to-Analog converter (D/A), and causing the D/A to convert the data to an analog signal. It is possible for other embodiments of the NDI to accept or produce analog signals directly to and from its data channels. By transmitting the data across the network in a digital format, the commands and data are less susceptible to noise and degradation.
- the NDI of the present invention operates in conjunction with a data protocol that allows the controller to communicate with either one or several network devices at a time across the network.
- the data protocol used by the NDI device of the present invention has a fixed, low-level instruction set. Due to the simplicity of the protocol, the NDI device of the present invention is not required to be a high-level processor. Instead, in one preferred embodiment, the NDI device of the present invention is a state machine implemented as an Application Specific Integrated Circuit (ASIC).
- ASIC Application Specific Integrated Circuit
- the NDI of the present invention is used as an interface between a common controUer and various network devices that are connected to the controller by a common network.
- Figure 1 is an illustration of one embodiment of the implementation of the interface of the present invention. This illustration is provided so that a more complete understanding of the present invention may be appreciated. It must be understood that the present invention is not limited to this configuration and may be embodied in many different network systems.
- the current embodiment of the NDI uses the RHAMIS-HS protocol, however, other embodiments contemplated by this disclosure may use other protocols.
- the networked system includes a master controller 32 such as high-level processor or personal computer that processes data from and sends commands and data to data channels 34, such as sensors, actuators, and subsystems, located at desired points in the network.
- the networked system further includes a network controller 36 connected between the master controller 32 and a network bus 38, and either one or several NDI devices 40 connected between the network bus and the data channels .
- Connecting the network controller and NDI devices to the network bus are respective transmitters, 42-46, and receivers 48-52.
- a first transmitter 42 connected between the network controller and the network bus transmits commands and data on the network
- a second transmitter 44 also connected between the network controller and network bus may be used in some embodiments to transmit a synchronous clock signal.
- the remote devices that are sensors are connected to a specific object under study and sense characteristics of the object such as temperature, strain, flex, speed, air flow, etc.
- the remote devices that are actuators are connected to mechanical members and other structures to operate on the object under test.
- One or several of the remote devices are connected to a single NDI device of the present invention via individual data channels containing converters and signal conditioning devices.
- either the master controller or the network controller may be configured to send data and commands across the network to the various network devices. Given that both of these controllers are capable of such action, the generic term bus controller is used in the discussion below to describe operations that may be performed by either the master or network controller.
- the controller sends commands and data digitally across the network to the remote devices, where the command and data is designated for either one or a group of the data channels on the remote devices.
- the commands and data are transmitted across the network using a data protocol.
- the NDI devices of the present invention receive and interpret the data and commands using the structure of the data protocol. (See step 210). Further, the NDI devices of the present invention determine whether the commands and data are designated for the data channels connected thereto. (See step 220). If so, the NDI either acquires data from the designated data channel if it is a sensor or commands the data channel to perform a conversion if it is an actuator. (See step 230). Analog data retrieved from the sensor channels is first converted into digital data, (see step 240), and then converted into the proper format according to the data protocol. Further, the digital data is transmitted to the controller. (See step 250).
- the NDI device of the present invention operates as an interface between the bus controller and the data channels.
- the NDI device of the present invention is capable of accepting digitized, analog data signals from data channels for transmission across the network bus.
- the NDI can also accept digital data from the bus controller and present it to a data channel. Then a D/A converter can change the data to an analog signal. It is possible that some data channels would accept and use the digital data directly without converting it to analog.
- Some embodiments of an NDI may have an analog-to-digital (A/D) converter and a D/A converter integrated into the NDI, thereby being configured to accept or present analog signals from or to data channels.
- the NDI device of the present invention also operates in conjunction with a selected data protocol to properly receive and decode or format and send data efficiently via a network bus.
- the NDI device of the present invention provides additional operations and features, such as programmable trigger command conversion, and clock signals, that allow the controller to communicate with different types of devices that compose data channels.
- the NDI device of the present invention includes stored information and procedures for configuring the data channels connected thereto.
- a D and D/A converters are examples of components of data channels that may need to be programmed or configured.
- the NDI device of the present invention may also provide a local clock signal to data channels that is some fraction or multiple of the local oscillator or synchronous bus clock.
- the local clock signals of many or all NDI devices on a network can be synchronized by the bus controller.
- the NDI device of the present invention operates in conjunction with the data protocol to provide a unique logical address and group addresses for each of the data channels, such that the data channels may be either addressed individually, in a synchronized group, or all together.
- the NDI device of the present invention also allows for data communication across the bus network using different data transmission modes. Specifically, in one mode of the present invention, the NDI device of the present invention operates in conjunction with the controller in a synchronous mode, in which a synchronous clock signal provided by the controller is used by the NDI device to receive commands and data from the bus controller. This same synchronous clock signal is used by the NDI to send data to the bus controller or other network devices.
- the NDI devices typically do not transmit the synchronous bus clock signal back to the bus controller. Instead, the NDI devices typically only clock data out on received edges of the synchronous bus clock signal in the synchronous mode. Generally, only the bus controller transmits the synchronous bus clock signal. Further, the bus controller will typically include an asynchronous receiver for receiving data from the NDI devices.
- the NDI device operates in conjunction with the controller in an asynchronous mode.
- the NDI device of the present invention analyzes and determines the bit rate at which the controller is transmitting data on the network bus and then uses this bit rate to retrieve commands and data from the bus controller and send data to the bus controller or other network devices.
- the NDI device may still synchronize data conversion on data channels located on different NDI devices. Data conversion is synchronized on the separate data channels by having it occur on or very shortly after the changing edge of a special bit in a command from the bus controller.
- Figure 3 A illustrates a generalized block diagram of a NDI device 40 according to one embodiment of the present invention.
- the NDI device of the present invention is connected between the network bus 38 and remote devices 34 and 36, such as illustrated previously in Figure 1.
- one of the remote devices 34 is a sensor and the other remote device 36 is an actuator or similar device.
- Both remote devices contain signal conditioning device s, 58 and 60, for conditioning analog signals.
- the signal conditioning 58 is for a sensor signal.
- the signal conditioning for an actuator is shown in 60.
- Signal conditioning can include but is not limited to amplifiers, filters, attenuators, etc.
- A/D and D/A converters connected between the remote devices and the NDI device of the present invention are A/D and D/A converters, 62 and 64, respectively.
- the A/D converter 62 is connected between the NDI device and the sensor 34.
- the A D converter converts analog signals from the sensor channel into digital data for input into the NDI device.
- the D/A converter 64 is connected between the NDI device and the actuator device 36 and converts digital signals from the NDI device into analog signals for input into the actuator channel. It is possible that some sensors and some actuators could produce or accept digital signals directly so that the A/D 62 or D/A 64 is not necessary.
- the NDI device of the present invention is connected to the network bus via a first receiver 50 that receives commands and data from the controller.
- a second receiver 52 is also provided for receiving the optional synchronous clock signal from the controller if the network is operated in synchronous mode.
- a transmitter 46 is also connected between the NDI device of the present invention and the network bus for transmitting data to the controller.
- a memory device 66 and a local oscillator 68 are connected to the NDI device of the present invention. Different embodiments of the NDI device could integrate some or all of the following: the receivers, transmitters, local oscillator, and memory.
- Figure 3B provides an illustration of the various control logic components of the NDI device 40 according to one embodiment of the present invention.
- the NDI device of this embodiment of the present invention includes ports, 70 and 72, for connecting to the data channels, 34 and 36. These ports are typically serial ports, but may be parallel ports in some embodiments.
- the ports of the NDI device are controlled by individual port controllers, 74 and 76.
- Data lines incorporated in each port include a data output line 78 referred to as Serial MOSI (master out slave in), a chip enable or chip select line 80 referred to as CE, a clock signal line 82 referred to as Serial CLK, and a trigger 84.
- the data output line 78 consists of a configuration data output line 78a and a data out/special command out line 78b.
- the configuration data output line 78a is used as described later for configuring the data channel at power up. Further, the data out/special command out line supplies data from the bus controller to the data channel.
- the output select line 19 toggles a select switch 86 between the configuration data output line and Serial out data line depending on whether the NDI device is in power up mode or in normal operation.
- the NDI device of the present invention further includes a data stack 88 defined as a plurality of data registers creating a memory.
- the data stack is used for storing digital data acquired from a data channel.
- a data stack can also be used for storing data from the bus controller to send to a data channel.
- the data stack is typically operated as a last-in-first-out (LIFO) device, where the last value placed in the data stack is the first value retrieved from the stack. This way, no matter what the stack size, data will be returned to the bus controller by different NDI devices in the same order. There is minimum delay between putting a new data value on the top of the stack to when the bus controller can read it. However, there would be a large delay if the bus controller had to read data from the bottom of a stack.
- LIFO last-in-first-out
- a stack depth register 90 associated with the data stack.
- the stack depth register indicates the number of valid data words in the stack at that time.
- a status register 92 and a data select multiplexer 94 for each data channel are internal to the current embodiment of the NDI device of the present invention.
- the status register includes information relating to the status of the data channel, such as whether the data channel is in a ready mode, whether the data channel supports a command, or whether there is a message transmission error, etc.
- the data select multiplexer depending on the data requested, connects either the status register, data stack, or stack depth register, to an output data multiplexer 96.
- the data select multiplexer 94 for each channel is controlled by the respective port controller, 74 and 76.
- the output data multiplexer 96 selects between the output of the two remote devices or a device inventory register 98.
- Different embodiments of the NDI device may have different multiplexer arrangements in the NDI device, but the effect will always be to allow the bus controller to access any register for any data channel in an NDI device that it needs.
- the Device Inventory block 98 is used by the NDI device to execute the Device Inventory operations that are shown in the flow chart in figure 8.
- the NDI device of the present invention also includes an address decoder 100 and a command decoder 102. As described later below, these decoders receive the command and data transmitted by the controller, decode the commands and data, and determine whether the commands and data are addressed to one or more of the data channels connected to the NDI device. If the commands and data are addressed for one of the data channels, the NDI device of the present invention will operate on the data channel in accordance with the command.
- the above components are sometimes referred to herein as a device interface.
- An NDI device will include a non-volatile memory indicated in Figure 3 A as memory device 66 that will be used by the NDI to store the UUID, protocol version, number of data channels, logical addresses, group masks, configuration data, and other data that the manufacturer or user may define.
- the communication with this memory device is illustrated in Figure 3B by the input and output lines from the configuration register 104 to the memory device.
- the bus controller will be able to read the memory and write to various memory locations according to the protocol.
- the logical address and group mask fields in memory are special. They can only be written to by the bus controller immediately after the NDI device has won a Device Inventory Competition according to the flow diagram in figure 8.
- the non-volatile memory 66 At power up some of the contents of the non-volatile memory 66 are loaded into the logical and group address decoder registers 100, configuration registers 104 for the Serial ports, 70 and 72, command translation registers in port controllers, 74 and 76, and some contents are sent out the Serial ports or other parallel ports for configuring data channels. There may be other uses for this memory data at power up.
- This memory can also be used by the bus controller to store user-defined information such as network device installation location, calibration data, etc. The contents of this memory are commonly called TEDs which stands for Transducer Electronic Data Sheet.
- the NDI device of the present invention may include control logic
- NDI device for receiving commands and performing built in testing, calibration, and transitioning the NDI device between a sleep and wake mode.
- the NDI device of the present invention communicates with a controller across a network bus.
- the discussion of the various operations of the present invention described below are with regard to the NDI device.
- Detailed operation of the master and network controllers is not described herein.
- a complete detaUed disclosure of the operation of the master controller and network controller is provided in U.S. Provisional Patent Application Number 60/254,137 entitled: NETWORK CONTROLLER FOR DIGITALLY CONTROLLING REMOTE DEVICES VIA A COMMON BUS and filed on
- the NDI device of the present invention provides several advantages.
- One important aspect of the NDI device of the present invention is self- configuration at power up of the A D and D/A converters and the remote devices connected to the NDI device.
- the remote devices connected to the network bus may be numerous and spread far apart making it difficult to configure the devices from a central location.
- the NDI device includes data related to the gain, offset, filters, etc. of the signal conditioning devices, 58 and 60, and data related to the A/D and D/A converters stored in the memory device 66, (illustrated in Figure 3 A).
- the NDI device of the present invention allows 16,16-bit digital words from the memory device to be output each of the ports, 70 and 72, at power up.
- This aspect of the NDI device of the present invention allows for automatic configuration of off-the-shelf A/D and D/A converters.
- the configuration data stored in the memory device is programmable by the controller.
- the 16, 16-bit words can be programmed to be split into 32, 8-bit bytes for output by the ports to the A/D and D/A converters and signal conditioning.
- the NDI device of the present invention can be programmed by the controller to change the Serial clock 82 phase and Serial clock 82 polarity at which the configuration data is output at the ports, 70 and 72.
- the NDI device of the present invention is also configurable to operate with different types of A/D and D/A converters and signal conditioning devices.
- converters such as successive approximation A/D converters and sigma/delta oversampling converters. These converters may operate differently in terms of clocking and operational delay.
- signal conditioning devices such as switched capacitor filters and digital anti-alias filters operate differently in terms of clocking.
- the controller in the synchronous mode, provides a synchronous clock signal across the network bus to the network devices.
- the synchronous clock signal is used as the clock signal for transmitting network data.
- Some A/D converters, such as Analog Devices' AD7714 converter need a continuous clock signal to operate correctly. This clock is usually lower frequency than the synchronous clock signal provided by the controUer.
- the NDI device of the present invention may include a clock divider 108.
- the clock divider may either be connected to the synchronous clock signal output by the controller as shown in Figure 3B or it may be connected to a local oscillator 68, as illustrated in Figure 3 A.
- This clock signal provided by the NDI device can be synchronized by the bus controller as shown in figure 9.
- the clock signal can simultaneously be synchronized in one, several, or all NDI devices on the bus.
- the internal clock frequency is shown as ! the synchronous bus clock frequency. It could actually be any other fraction of the synchronous bus clock frequency.
- Figure 4 is a block diagram of the operations performed by the NDI in response to one particular command from the bus controller. This diagram illustrates that the NDI device is capable of doing more than one task at a time. The ability of the NDI device to do multiple tasks at the same time allows the NDI device of the present invention to acquire or control 1 or more data channels at the same time while simultaneously communicating with the bus controller.
- the NDI device of the present invention initially receives a command, (see step 310), such as Trigger and Read command, from the controller and interprets the command. If the command and address are intended for a data channel on the NDI device the NDI device begins the operations shown in steps 330 and 360 in parallel.
- a command such as Trigger and Read command
- the NDI device sends a convert signal to the data channel attached to the NDI. (See step 330).
- the rising edge of this data pulse occurs at the center edge of the parity bit at the end of the Trigger and Read command.
- the convert signal is provided to latch analog data into the sample and hold circuitry of an A/D converter, or can be used to cause a D/A to start a conversion process.
- the precise timing of the rising edge of this signal allows many data channels to know when to sample or convert analog data, even if the network devices are not operating in synchronous mode.
- a short pause occurs. (See step 340).
- This pause allows the data channel to have time to convert the analog signal latched in its sample and hold to be converted into a digital value.
- this pause is programmable. There are two choices. It can be only a few hundred nanoseconds long, or it can be programmed to be 6 microseconds long.
- a serial transfer occurs. (See step 350). During this Serial transfer a programmable word is clocked out on the MOSI line. This programmable word is used to cause special A/D converters to output data. An example is an AD7714. As this serial transfer continues, data is returned from the data channel to the NDI device. The digital data returned to the NDI device on the MISO line is stored in the in data register 89. At the same time operational steps 330, 340, and 350 are occurring, operational steps 360, 370, and 380 are also occurring. In operation step 360, the contents of the in data register 89 are shifted into the top of the data stack. Next, the contents in the top of the data stack are loaded into the transmitter register. (See step 370). The last operation is for the contents of the transmitter register are transmitted back to the bus controUer by the NDI device's transmitter 46. (See step 380).
- the NDI interface is providing a continuous clock signal to the data channel. Not all data channels will use this clock but it is available. The frequency of this clock is programmable. This clock signal is useful for running devices such as switched capacitor filters, digital filters, or sigma/delta converters, etc. This clock signal continues running even when operational steps 300- 380 are not taking place.
- the controller transmits a command comprising a start bit, a command field, an address filed having an unused last bit set to 0, and a stop bit set 1.
- the NDI device of the present invention commences performance of the function at each data channel coincident with the transition from the unused bit of the address field to the stop bit.
- some A/D and D/A converters also require special commands.
- some A D and D/A converters are programmable to take different readings from a sensor.
- an A D converter is connected to a strain gauge that senses strain in three dimensions. Each readable dimension is addressable with a separate 16-bit address. Either one or all of the measurements for each dimension may be accessed by applying the associated 16-bit command to the converter. It may become burdensome to store all of the bit commands in the controller and transmit them across the network bus.
- the NDI of the present invention maintains these special commands so that they do not have to be kept up with by the controller or sent across the network.
- the NDI of the present invention includes the specialized bit commands associated with the A D or D/A converters connected to the NDI.
- these commands are originally stored in the memory device 66, where they are programmable.
- these specialized bit commands may be stored in the command decoder 102.
- the controller when a remote device having a converter with specialized commands is to be addressed, (to either obtain data from a sensor or in the case of an actuator, activate the remote device), the controller will send a properly formatted trigger command along with the address of the data channel with the converter. (See step 400). (The format of commands is discussed below).
- the NDI associated with the data channel receives the command and address, (see step 410) the NDI initially determines whether the remote device addressed needs specialized commands. This is done by comparing the address received to the address associated with the data stored in the command decoder. (See step 420). Based on the address, the NDI of the present invention retrieves the proper specialized command from the command translation register. (See step 430).
- the specialized command is then applied to the converter to either receive information, in the case of a sensor, or activate an actuator corresponding to the command. (See step 440).
- the controller and the NDI device of the present invention are capable of operating in either a synchronous or asynchronous mode. In the synchronous mode, the controller provides a continuous synchronous clock signal. The synchronous clock signal is used by the NDI device of the present invention to clock in data from the bus controller and to clock data out to the controller. This allows the bus controller to pick any data rate between 0 bits/sec up to some maximum bit rate.
- the NDI device of the present invention can automatically detect whether the controller is operating in the synchronous or asynchronous mode. Specifically, with reference to Figures 3 A, 3B, and 6, the NDI device of the present invention continuously checks the signal received on the second receiver 52 using a clock detector . (See step 500). If a synchronous clock signal is present, (see step 510), the NDI device of the present invention operates in the synchronous mode, (see step 520), and uses the synchronous clock signal from the controller to clock data in and clock data out. However, if the NDI device of the present invention does not detect a synchronous clock signal from the second receiver 52, (see step 510), the NDI device of the present invention operates in asynchronous mode. (See step 530).
- the controller may operate at various bit rates.
- the NDI device of the present invention detects the bit rate at which the controller is operating. Specifically, with reference to Figure 7, in this embodiment, after the NDI device of the present invention determines that the controller is operating in asynchronous mode, the NDI device of the present invention monitors the bits of the command and data transmitted by the controller. (See step 600). The NDI device determines the time between receipt of each bit using a bit rate detector. After a predetermined number of bits have been received having substantially the same time between transmissions, (see step 610), the NDI device of the present invention chooses and operates at the bit rate of the data being sent to the NDI device.
- the ability of the NDI device to detect bit rate is advantageous for fast recovery when there are power glitches in the networked system, or where the controller has transitioned from synchronous to asynchronous mode.
- a second important advantage of the automatic synchronous clock detect and automatic bit rate detect features is that it allows a single type of NDI device to communicate on the network using different modes of network communication.
- Designer of the network system can choose the mode of network communication that is optimized for the particular application of the network system.
- the bus controller can command the NDI device to receive and transmit data at a specific bit rate. The bus controller sends a change bit rate command followed by the bit rate the NDI devices is to change to.
- the NDI device will receive data from and transmit data to the bus controller at the bit rate instructed by the bus controller. Further, the controller may send an example message at the new bit rate, and the NDI of the present invention will change to the new bit rate before real commands and data are sent.
- Another advantage of the NDI device of the present is the ability of many data channels on many different NDI devices on a network bus to sample or convert analog data at substantially the same time when communicating to the bus controller in the synchronous or asynchronous modes.
- One method of synchronization of data sampling or conversion in the asynchronous mode is accomplished by having the rising edge of convert signal 84, (see Figure 3B), go high at or very shortly after the changing center edge of the convert command from the bus controller.
- Some protocols call a convert command a trigger command.
- the ability of the protocol and NDI devices to take data or convert data simultaneously even in the asynchronous communication mode is called isochronous.
- the second method of synchronization data sampling is by providing synchronized clock signals from each NDI device to each data channel associated with each NDI device.
- the clock signals are synchronized by the bus controller using the synchronize command, and the NDI devices synchronize in response to the command according to the timing in figure 9. That way all data channels using a clock signal that has a frequency that is a divided fraction of the synchronous bus clock will all be running nearly perfectly synchronously.
- the NDI device of the present invention can also save overhead in the transmission of data across the network.
- the NDI device of the present invention includes a data stack 88.
- the data stack is an In Data Stack.
- the In Data Stack contains data received from the data channel.
- the data stored in the In Data Stack can be read out by the controller either one word at a time, (i.e., one register at a time), or as a block of data, (i.e., multiple registers at a time). Reading a block of data from the data stack at a time saves network overhead.
- the data stack is an Out Data Stack.
- the Out Data Stack contains data transmitted by the controller to be output to the actuator data channel .
- the actuator performs a digital to analog conversion of the word at the top of the data stack, then NDI device will pop the stack, and transmit the new word at the top of the stack to the D/A.
- Data words can be written to the Out Data Stack individually by the controller or as a block of words. Writing a block of data to the Out Data Stack instead of one a time saves network overhead.
- the NDI device of the present invention also provides additional advantages. Specifically, in one embodiment, the NDI device of the present invention operates in conjunction with a protocol that allows data channels to communicate over a simple and high-speed, yet robust, digital multi-drop network. It must be understood that any applicable protocol could be used in conjunction with the NDI device of the present invention. However, described below is a particular protocol that provides several advantages when used in the networked system 30 illustrated in Figure 1. One important advantage being that the simplicity of the protocol allows the NDI device to be implemented as a state machine, as opposed to a high-level processor.
- the protocol is designed to insure low-level communication control interface, (i.e., network controllers and NDI devices).
- the protocol makes possible the development of controUer and network device interfaces that are highly miniaturized within the network. If the network controller and NDI devices are implemented in an Application Specific Integrated Circuit (ASIC) or FPGA working in conjunction with the protocol, the network controller and NDI device can respond quickly and efficiently allowing for maximized bus efficiency. If the bus controller or NDI device is implemented as an ASIC, the bus controller and NDI devices can be made very small.
- ASIC Application Specific Integrated Circuit
- the protocol of the present invention also has a low-overhead command structure.
- the protocol of the present invention does not use a fixed -length message. The length of the message varies depending on the command. This, in turn, permits the elimination of unnecessary data being transmitted if it is not needed to execute a command.
- the command set is minimal and straightforward thus allowing the user to easUy pass data through the network bus with minimal manipulation.
- the NDI device of the present invention operates in conjunction with a protocol that has a fixed, low-level instruction set that, in turn, allows in some case for use of simplified controllers and network device interfaces on network devices.
- the low level command set allows the NDI devices to be implemented as state machines instead of processors or micro-controllers.
- An example of how the low level command set works is given here. If the bus controller wants to read a data word from the memory of an NDI device it sends a command to the NDI called set pointer, then follows the command with the pointer value. The NDI decodes the command and sets its memory address pointer to be the value sent by the bus controUer.
- the memory address pointer only needs to be a register that latches the value sent by the bus controller.
- the bus controller will issue the read memory word command to the NDI device.
- the NDI device responds by accessing the memory word pointed to by its memory address pointer, and transmitting it to the bus controller. If the bus controller wants to read a block of data from the memory of the NDI it repeats the process multiple times. If the command set is a high level command set, the above described read process, would be implemented as a read special memory block command.
- the NDI device would need to be able know where to set its pointer to access the special memory block, set its pointer, know how big the special memory block is, and then send the special memory block.
- This protocol offloads many of these tasks, such as keeping track of where special memory information is stored, and how big the block sizes of the special memory information is, and where to store special memory data, from the NDI device. These tasks are performed by the bus controller instead by stringing low level instructions like set memory pointer and read and write memory together.
- the NDI device of the present invention operates in conjunction with a protocol that has a fixed, low-level, and low overhead instruction set that, in turn increases the actual data rate on the network bus when used with smart sensors and actuator. Network traffic for networking sensors and actuators is different from regular computer network traffic. Computer networks need to transfer large data files or messages from one computer to another. Consequently they have checksums and block sizes associated with the messages to ensure robust and error free data transmission.
- checksums and block sizes, or other overhead, associated with these computer network protocols is not a problem because the size of the overhead is small compared to the total message size.
- Network traffic for sensors and actuators is different because in many cases, most of the messages on the network are very small messages with only 16 bits of data. If a block size, checksum, or other unnecessary overhead is added to the small 16 bit data message, the checksums, blocksize, and other overhead can contain more bits than the actual 16 bit data message. This effectively reduces the bandwidth of the sensor and actuator network bus.
- the NDI devices of the present invention solve this problem by using a message protocol that does not add any unnecessary overhead such as checksum and block size to short 16 bit messages.
- the only overhead added to these short 16 bit messages is a sync pattern to indicate the start of a message, a flag bit, and a parity bit.
- the parity bit is used to check for errors in the 16 bit message.
- the flag bit indicates if an error condition exists in the sending NDI device or associated data channel.
- the protocol of the present invention is typically transmitted in a Manchester encoded format, but may also be implemented in a Universal Asynchronous Receiver Transmitter (UART) format protocol, if needed, to communicate with other UART systems.
- UART Universal Asynchronous Receiver Transmitter
- the protocol uses an RS-485 based, multidrop, Manchester encoded protocol referred to as Bi-Phase Sensor and System (BiSenSys).
- BiSenSys is an 18-bit high speed, highly efficient protocol for use in connecting remote devices and subsystems together on a digital bus structure that uses Manchester encoding.
- An example of another protocol that uses Manchester coding is MIL-STD-1553.
- each bit of the data is detectable by one detectable transition, (i.e., "0" is defined as low to high and "1" is defined as high to low).
- each message consists of a sync pattern, a message body, and a parity flag.
- the BiSenSys transmission protocol can be operated in synchronous or asynchronous mode and the can be implemented to operate at any data rate from 1 Hz-lOMHz in the synchronous mode or at 1.25, 2.5, 5.0, and 10.0 megabits per second in asynchronous mode. Additionally, the protocol of the present invention may be implemented in a UART based protocol.
- This protocol is designed to operate at a 1.0 megabit per second data rate and uses a 9-bit message format and non-return-to-zero bit coding.
- the first type is a command frame.
- a command frame consists of a command sync pattern followed by 10 Manchester encoded address bits, followed by 7 Manchester encoded command op- code bits, and 1 Manchester encoded parity bit.
- the command sync consists of the one and a half bus bit periods high and one and a half bit periods low state on the bus.
- the second type of frame is an argument frame.
- An argument frame begins with a data sync pattern which is followed by 16 Manchester encoded argument bits, one Manchester encoded flag bit, and finally one Manchester encoded parity bit.
- the data sync pattern consists of the one and a half bit periods low followed by one and a half bit periods high.
- the last type of BiSenSys frame is the data frame. Data frames begin with the data sync pattern, which is foUowed by 16 bits of Manchester encoded data, one Manchester encoded flat bit, and one Manchester encoded parity bit.
- the only difference between an argument frame and a data frame is that argument frames are transmitted by the bus controller data frames are transmitted by network devices. Arguments are only transmitted by the bus controller following certain commands. The commands that require an argument to follow them are defined in the RHAMIS/BiSenSys protocol. If the bus clock is used in the BiSenSys synchronous mode, it is transmitted in quadrature to the Manchester encoded bit stream.
- the message format contains 3 or more 11- bit frames. Each message has three required frames per message with two additional optional frames per message depending on the command issued.
- the first bit in every frame is a start bit (set to 0), and the final bit of all frames is a stop bit (set to 1 ).
- the first frame in a message is an address frame for the UART protocol. It is in the form of: a start bit, an 8-bit address field, an address bit set to 1, and a stop bit.
- the second frame in a UART message is a command frame.
- a command frame consists of a start bit, a 7 bit command field, an unused bit, the address bit set to 0, and the stop bit. If argument frames belong in the UART message, they foUow the command frame.
- the present invention also provides a method for assigning unique addresses to each data channel. As Ulustrated in Figure 1, in a typical networked system 30, there will be numerous data channels connected to a plurality of different NDI devices, all of which use a common network bus for communication with the bus controller.
- each of the network devices may have several data channels or several tasks that can be commanded by the NDI device.
- the protocol of the present invention provides three types of addresses for each data channel of a network device. Specifically, each data channel on each network device can be assigned an individual logical address, a global address, and if configured, a group mask.
- the logical address is an address recognized by a single data channel on a network device or a single controllable task with a network device.
- a global address is recognized by all of the data channels of all of all of the network devices, while a group address is recognized by a subset of all of the data channels of all of the network devices.
- Data channels are not assigned group addresses. They are assigned group masks. Each bit in the group mask corresponds to a group address. In this way a single 16-bit mask can be used to assign a data channel to 16 groups. For example if the 1 st and 3 rd bit of the group mask are set to 1 , the data channel recognizes itself as belonging to groups 1 and 3. It will respond to command messages having a group address of either 1 or 3.
- the determination of the logical and group addresses may be by any selected method.
- a preferred method is described in U.S. Provisional Patent Application Number 60/254,137 entitled: NETWORK CONTROLLER FOR DIGITALLY CONTROLLING REMOTE DEVICE VIA A COMMON BUS and filed on December 8, 2000.
- This method uses the Universal Unique Identifier (UULD) associated with each network device.
- UUID code is an 80-bit code that is unique to every network device and is based on the location and date the device was manufactured.
- the UUID for network device of the present invention are typically stored in the NDI device' s memory device 66.
- the controller sends various commands to the NDI devices of the present invention commanding them to access their respective memory device, analyze the individual bits of the UUID and either respond or remain silent based on whether certain bits are 1 or 0.
- This allows the bus controller to discover the TJUTD of every network device, one network device at a time.
- the bus controller wiU assign logical addresses and group masks to every data channel on that network device.
- Figure 8 is a flow chart of the steps taken by a network device using an NDI device, under control of the bus controller, to uniquely identify itself to the bus controller. To begin a Device Inventory session NDI devices are enabled using the Device Inventory Enable command.
- step 700 This puts the NDI in the Device Inventory mode. (See step 700). If address "0" (the reserved global address for all devices) is specified in the address field, every network device on the bus will put itself into the Device Inventory mode. If a currently assigned logical address is specified in the address field, that network device will put itself into the Device Inventory mode. If a currently assigned group address is specified in the address field, all network devices belonging to that group will put themselves into the Device Inventory mode.
- the Device Inventory command with the New UUID Word Search function code sets all Device Inventory session enabled devices into the UUID Word Search mode. (See step 705). Network devices on the bus will not compete in a UUID Word Search unless they are in the UUID Word Search mode. Immediately after being commanded into the Word Search Mode, the NDI device automatically proceeds by loading the least significant bit of the UUTD into a first register and a "1" into a second register. (See step 710). When NDI devices are in the UUID Word Search Mode they will respond to the two UUID Bit Competition function codes. The Master Controller will issue the Device Inventory command with the UUID Bit Competition, No Dropout function code.
- AU NDI devices will make a decision based on this command. (See step 720).
- the NDI device will proceed to step 730 and make a decision bases on its bit in register 1. If this bit is a "1,” (see step 730), the network device will remain quiet. If this bit is a "0,” the network device will transmit a UUID pulse. (See step 740). The network device will then move the evaluated bit (either a " 1" or a "0") into bit register 2, access its next UUID bit and load it into bit register 1. (See step 760).
- the Master ControUer will listen for UUTD pulses transmitted on the bus. When the Master Controller hears a UUTD pulse it knows at least 1 network device has a "0" for its current UUTD bit. If the Master Controller hears at least one UUTD pulse, the next command it will issue is the Device Inventory command with the UUTD Bit Competition, l's Dropout function code. The NDI device will have to interpret the command and make a decision. (See step 720). When a network device hears this command and code, it will look at its UUID bit in register 2. (See step 780). If this bit is a " 1 ", the network device will exit the current UUID Bit Competition mode and quit competing in the UUTD Word Search.
- the network device will look at the bit in register 1. (See step 730). If it is a "0", the network device will transmit a UUID pulse. (See step 740). If this bit is a " 1", the network device will remain quiet. The network device will then move the bit in register 1 into bit register 2, access its next UUID bit and load it into bit register 1. (See step 780). If the Master Controller does not hear any UUTD pulse on the bus, the Master
- the Master Controller will have to issue a combined total of 81 UUID Bit Competition function codes. (See step 750). The Master Controller must issue the 81'st UUTD Bit Competition function code so that the last network devices on the bus can resolve who had the winning last bit. After the Device Inventory command with the UUTD Bit Competition function codes has been issued for a combined total of 81 times there will be only one network device left in UUTD Word Search mode. This network device is the winner. (See step 770). This network device has now been uniquely identified to the bus controller and will respond with the contents of a special memory location. (See step 780). The high byte of the special memory location will hold the protocol revision number, and the low byte will be the number of data channels on the network device. The winning network device and the bus controller will know the network device has won by winning all 81 -bit competitions.
- the device When the winning device has received the 81 st UUID bit competition function code, the device will respond with a Bi-Phase compliant data field containing the protocol version number and the number of channels the device has stored in its memory. (See step 780).
- the bus controller may use this information to determine logical address channel assignment in the winning device.
- the winning network device will unprotect its logical address and group mask memory locations. (See step 790).
- the bus controller will assign logical addresses and group masks immediately following. (See step 800). If the data channel includes a plurality of the channels, the Master Controller will assign logical addresses and group masks to each channel. (See step 810). After the logical addresses and group masks have been assigned, the network device will exit the device inventory mode.
- the bus controller will repeat the UUTD word searches until all network devices have been discovered, and a logical address and group mask assigned to every channel.
- the bus controller knows it has discovered all devices when the UUTD if discovers in the bus is all 1 's. No network device will ever have a UUID of all l's.
- each channel for each network device is provided with a logical address that uniquely identifies the data channel.
- group addresses that address a number of data channels, and a global address that addresses all channels of all network devices.
- the global address is used for the exchange of global data and commands.
- the group address is an address that is recognized by multiple data channels of the network devices. Group addresses cause one or more data channels to respond to the same command at the same time. It is possible to have only one data channel assigned to a group address.
- Associated with the group address is a group mask stored in the address decoder 100.
- the group mask is a 16-bit word, where each bit set to 1 represents the groups that the data channel belongs.
- the global address is assigned OOOOhex.
- all of the NDI devices will follow the command. This is typically used for resetting the system or testing the system.
- the group addresses are selected in the range of OOOlhex to OOOfhex.
- the NDI device data channel of the present invention will interpret and follow the command associated with the group address. For example, if the group mask stored in the device inventory register is 100000001 lOObin, the NDI device belongs to group addresses OOOfhex, 0003hex, and 0002hex.
- the group address scheme is designed to permit the user to set up time deterministic triggers for groups of sensors or actuators at various sample rates.
- Table 1 illustrates a group of sensors having different sample rates and their group assignments, and Table 2 the sequence for polling the devices. As can be seen from these tables, the data channels can be grouped together such that they may be triggered simultaneously but at different sample rates.
- the address decoder 100 and a command decoder 102 of the present invention will decode the address portion of the command and will compare the group address to group mask stored in itself. If the group mask indicates that the network device is subject to the group address, the proper data channel will perform the command associated with the group address on the network device.
- the addressing methods used with the protocol allows the controller to send commands and data to either one or several of the network devices, with the different forms of data transmitted depending on whether BiSenSys or UART is used.
- the commands typically used to communicate across the network bus are provided below.
- the protocol of the present invention is designed to maximize efficiency so that the commands and response messages can vary in length depending on the data quantity required to execute any command.
- the protocol of the present invention provides three levels of utility. These commands are listed in Table 3.
- Service commands are intended for network housekeeping, network device interface status, power control, calibration, and bus master arbitration. These commands are briefly described below.
- the No Op command instructs the NDI device of the present invention to take no action.
- the No Op command is typically used in initialization of operation or by the master or network controller, (see Figure 1), to maintain bus control.
- the Built-in-Test (BIT), E-Calibration, and Z-Calibration commands are used to perform self-test on the NDI devices connected to the network bus.
- the BIT command commands the NDI device to perform a check of internal circuitry.
- the E-Calibration command forces an excitation calibration, where the input from a sensor network device is replaced with a reference voltage, and the NDI device takes a reading to determine the calibration of the NDI device at the reference voltage.
- the Z-Calibration command initiates a zero calibration measurement, where the input for a sensor data channel is shorted. The NDI device takes a reading to determine the offset of the data channel.
- the protocol also includes two types of reset commands, namely Reset and Synchronize.
- the Reset command initializes all the network device interfaces of the present invention that are connected to the network bus to a power-up state. This Reset command is typically used by the controller to reset the bus and network devices when necessary and regain control of the network bus.
- the Synchronize command is an important command for establishing and maintaining synchronization between several NDI devices.
- some A/D and D/A converters require a continuous clock signal that is different from the synchronous clock signal provided by the controller.
- This clock signal is provided by a divider that divides down either the synchronous bus clock signal or the clock signal from a local oscillator. This divided clock signal is used by the converter to convert data.
- the divider provides the proper clock frequency needed by the converter, the presence of these different dividers on the different NDI devices can cause the converter on one NDI device to not be synchronized with a converter on another NDI device.
- all of the converters may be operating at the same frequency, but the dividers may be out of phase.
- the Synchronize command synchronizes the divided clock signal among a plurality of NDI devices.
- the NDI device when the divider is using the synchronous clock signal and the Synchronize command is issued, the NDI device will control its clock divider to reset and restart producing the clock signal. All of the NDI devices will do the same reset and restart of their clock dividers at the same time according to the group or global address used in the synchronize command.
- Figures 11a, 1 lb, and 1 lc illustrate alternative embodiments of how the NDI device of the present invention can be attached to and control different data channels.
- Some data channels will only need the convert signal from the NDI device to acquire data with precise timing as in Figure 11 A.
- Some data channels will need only the synchronized divided clock and possibly the synchronize signal to acquire data with precise timing in Figure 1 IB.
- Some data channels, such as in Figure 1 IC may require both the convert and divided clock signals to acquire data with precise timing.
- the use of the Synchronize command is illustrated with respect to causing switched capacitor filters 126, sigma/delta A/D converters 120, or digital filters 118, etc.
- the clock divider is dividing the local oscillator to produce the clock signal, the divider will reset and restart at the center edge of the parity bit of the synchronize command. This will cause the clock dividers among a plurality of NDI devices to synchronize together. It is realized that the clocks will drift out of phase over time however because of variations in the frequencies of the local oscillators. If the source for the clock divider is the bus clock, the clock dividers will synchronize according to the timing in Figure 9, and the divided clocks will continue to run synchronously after that.
- the current embodiment of the NDI device provides the synchronize signal, 116, 124, and 128, to the data channels attached to it to reset or synchronize sigma/delta A/D converters 120, digital filters 118, or other devices.
- the protocol also includes Wake and Sleep commands.
- the Sleep command powers down certain portions of the network devices and the Wake command powers them up.
- the protocol includes the Read Status Register command. This command provokes a read of the status register of the NDI device and provides information, such as whether the network device is busy, whether it supports certain commands, whether the controller requested to much or too little data from the data stack, whether message transmission errors have occurred, whether the memory is unprotected, etc.
- the Control Pass command is used by the master and network controllers to establish which bus controller is in control of the bus, if there is more than one bus controller on the network bus. Further, the Baud Select command can be used by the controller to change the baud rate on the network bus when operating in the asynchronous mode.
- the Device Inventory Enable command and the Device Inventory command were previously discussed in relation to the unique identification of every network device and the assignment of logical addresses and group masks to the data channels.
- the Device Inventory Enable command selects groups of network devices to be inventoried.
- the Device Inventory command is used to control most actions associated with identifying network devices and assigning logical addresses and group masks.
- the command is different in that the address field of the command is used to direct various device inventory functions within a device. For example, these functions include entering into anew Word Search competition and the actions associated with No Dropout and l's Dropout. Further, the commands include reading from the memory of the device that won the Word Search and writing the logical addresses and group masks.
- a second type of commands is data type commands. These commands are tailored for time-deterministic data acquisition and control. Network efficiency is maximized by permitting NDI devices to move one data point directly or more than one data point as defined-length block transfers.
- the Trigger command is used by the controller to initiate an incoming data measurement in a sensor data channel or cause a data conversion to a physical quantity in an actuator data channel.
- each of the channels of the network device interface of the present invention includes an In-Data Register 89 and an In-Data Stack 88. When the Trigger command is received by the NDI device, the contents of the In-Data register are pushed to the top of its In-Data stack. It will then take a new reading from the data channel.
- the new reading When finished reading, the new reading will be in the In-Data register.
- the bus controller will normally read data from the in-data stack. While acquiring data from the In-Data stack causes a latency of one or more sample in the sensor reading sent to the bus controller, this arrangement allows Read- in-data-stack commands to be issued to a sensor data channel immediately after a Trigger command. Read in-data stack commands read data from the in data stack. This, in turn, allows maximum use of the network bus bandwidth, which is important where sensor data channels have long conversion times. This also simplifies the Trigger and Read command set that the user must write because pauses do not need to be included before reading from the in-data stack.
- the Read In-Data Register Word command permits reading data from the In- Data register immediately after it becomes available from the data channel .
- the bus controller must not try to read from this register before the data becomes valid.
- the NDI device will command a data conversion on the value at the top of the Out Data Stack and then pop the Out Data stack.
- there is not out-data stack in the NDI device there is not out-data stack in the NDI device.
- the data is sent from the bus controller to the NDI device and straight to the D/A converter or data channel without passing through a data stack.
- the D/A or data channel connected to the NDI device has a register to hold the data which serves as an out-data stack with a size of one stack word.
- the Trigger and Read command is used to initiate a measurement cycle of a data channel and immediately transmit the results of the previous measurement on the network bus.
- the NDI device of the present invention simultaneously pushes the contents of the In-Data register onto the In-Data stack, begins a new measurement cycle, and begins transmitting the contents of the top of the In-Data stack.
- the push to the In-Data stack will occur before and during the transmission of the data sync pattern of the command. In this way, the result of the previous measurement will be valid and in the data stack when the transmitter section of the NDI device accesses it for transmission.
- the data sample is then transmitted across the network bus while a new measurement is taken.
- the Read In-Data Register Word command initiates a read directly from the In-Data register.
- the NDI device places the contents of the In-Data register on the network bus.
- the Read In-Data Stack Word command is used to read a data word from the top of the In-Data stack.
- the NDI device of the present invention responds by outputting the newest data word from the data stack onto the network bus and older data is shifted to the top of the stack.
- the data stack associated with each channel of the NDI device of the present invention includes several registers.
- the Query In- Data/Out-Data Stack Depth command is used to determine how many valid data words are on the In-Data or Out-Data stack.
- the NDI device of the present invention keeps track of the number of valid data words in its stack depth register. The value of this register is transmitted to the bus controller by the NDI device when commanded by the bus controller.
- the Write Out-Data Stack Word command directs the NDI device of the present invention to write a data word to the top of the Out-Data stack. Further, the Write Out-Data Stack Word/ Acquire To In-Data Register command further directs the NDI device to simultaneously acquire data from the data channel and put it into the In-Data register. If the output signal to the data channel is connected to input to the NDI from the data channel, this command can be used to echo data sent to the actuator back to the bus controller. Similar to the Write Out-Data Stack Word, the Write Out-Data Stack Block command directs the NDI device to write multiple data words to the Out-Data stack.
- the protocol of the present invention also includes memory commands. These commands permit access to specific defined memory locations or functions to which data can be written or read. This permits random access data blocks to be efficiently transferred between one system and another with little overhead. It also permits direct memory access and/or one or more data buffers blocks to be moved.
- the command Set Memory Pointer sets the memory address pointer within the NDI device.
- the Read Memory Word With Current Pointer command is used to read a single word from memory pointed at by the memory address pointer.
- the Read Memory Block With Current Pointer is used to read a block of data words from memory starting at the memory word pointed to by the current value of memory address pointer.
- An argument passed with the command to the NDI device instructs the NDI device as to how many data words are to be read. After each memory word is sent to the bus controller by the NDI device, the memory pointer is automatically incremented by one. Then the next memory word is transmitted. This process is repeated until the number of memory words requested by the bus controUer has been transmitted.
- the protocol of the present invention also includes write memory commands. Specifically, the Write Memory Word With Current Pointer command writes a single word into memory. The NDI device will write the argument accompanying the command into memory at the location currently pointed to by the memory address pointer. The Write Memory Block With Current Pointer command, on the other hand, writes a block of data words into memory. The NDI device of the present invention will write the arguments accompanying the command into memory beginning at the location currently pointed to by the memory address pointer. After each word is written, the memory address pointer is incremented by one. This process is repeated until all of the words have been written into the memory.
- the protocol of the present invention includes commands for reading and writing words and blocks of data from and into memory using a pointer sent by the controller along with the command.
- These commands operate similar to those above, except the pointer is provided as an argument following the command.
- These commands are: Read Memory Word With Passed Pointer, Read Memory Block With Passed Pointer, Write Memory Word With Passed Pointer, and Write Memory Block With Passed Pointer.
- the NDI device of the present invention provides for digital communication of commands and data between a controller and various network devices across a network bus.
- a networked system implementing the NDI device of the present invention is illustrated in an aircraft 10.
- a network is used to monitor various critical structural locations.
- strains 12 such as wing root, wing surface, tail root, tail cord and landing gear strains
- accelerations 14 such as wing tip and tail tip accelerations.
- the network includes sensors 16 to monitor the pressure at various critical structural locations, such as critical belly pressures for sonic fatigue, as well as key corrosion locations 18 for radar, landing gear and leading edges, and engine casing temperatures 20.
- all of the network devices are connected to a common bus, thereby eliminating excess wiring. Further, data and commands are transmitted digitally to reduce susceptibility to noise.
- the preferred protocol for the NDI devices uses Manchester encoding of network data bits to help allow miniaturization of the NDI devices. It must be understood that for any device to receive asynchronous serial data, it must be able to acquire the timing of the data sequence from the serial data stream. Normally, the receiver of the serial asynchronous data must have a local oscillator to cause its receiver to operate, and recover the timing information from the serial data. Once the timing information has been extracted, the asynchronous receiver is able to receive serial data at certain rates, plus or minus a certain deviation from these rates, given this local oscillator frequency. Manchester encoding of serial data causes a transition from high to low or low to high in the center of every bit. This makes it easy to extract the necessary timing information from the serial data stream.
Landscapes
- Engineering & Computer Science (AREA)
- Computer Networks & Wireless Communication (AREA)
- Signal Processing (AREA)
- Physics & Mathematics (AREA)
- Spectroscopy & Molecular Physics (AREA)
- Information Transfer Systems (AREA)
- Small-Scale Networks (AREA)
- Selective Calling Equipment (AREA)
- Communication Control (AREA)
- Synchronisation In Digital Transmission Systems (AREA)
Abstract
Description




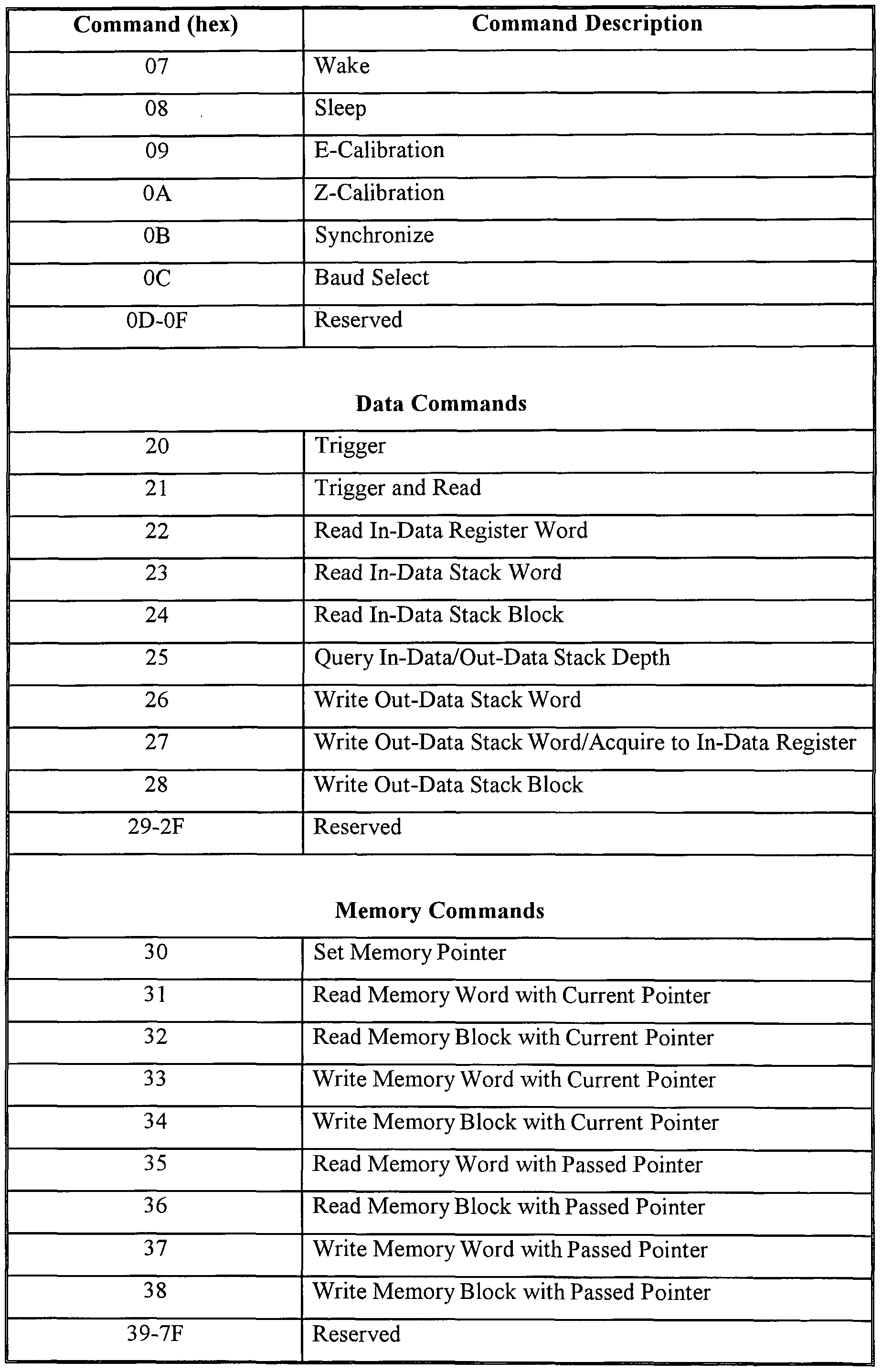
Claims
Priority Applications (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| JP2002548925A JP3995594B2 (en) | 2000-12-08 | 2001-11-05 | Network device interface for digitally interfacing data channels to the controller over the network |
| AU2002241516A AU2002241516A1 (en) | 2000-12-08 | 2001-11-05 | Network device interface for digitally interfacing data channels to a controller via a network |
| EP01988185.3A EP1356629B1 (en) | 2000-12-08 | 2001-11-05 | Network device interface for digitally interfacing data channels to a controller via a network |
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US25413600P | 2000-12-08 | 2000-12-08 | |
| US60/254,136 | 2000-12-08 | ||
| US09/735,146 US6708239B1 (en) | 2000-12-08 | 2000-12-12 | Network device interface for digitally interfacing data channels to a controller via a network |
| US09/735,146 | 2000-12-12 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| WO2002047324A2 true WO2002047324A2 (en) | 2002-06-13 |
| WO2002047324A3 WO2002047324A3 (en) | 2003-08-14 |
Family
ID=26943848
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| PCT/US2001/044144 WO2002047324A2 (en) | 2000-12-08 | 2001-11-05 | Network device interface for digitally interfacing data channels to a controller via a network |
Country Status (5)
| Country | Link |
|---|---|
| US (7) | US6708239B1 (en) |
| EP (6) | EP2544063A3 (en) |
| JP (2) | JP3995594B2 (en) |
| AU (1) | AU2002241516A1 (en) |
| WO (1) | WO2002047324A2 (en) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2005057861A1 (en) | 2003-12-12 | 2005-06-23 | Mitsubishi Denki Kabushiki Kaisha | Data collection system |
| CN101895450A (en) * | 2009-05-20 | 2010-11-24 | 株式会社瑞萨科技 | Conductor integrated circuit device |
Families Citing this family (152)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US8172546B2 (en) | 1998-11-23 | 2012-05-08 | Entegris, Inc. | System and method for correcting for pressure variations using a motor |
| US7029238B1 (en) | 1998-11-23 | 2006-04-18 | Mykrolis Corporation | Pump controller for precision pumping apparatus |
| US20030048862A1 (en) * | 2001-09-10 | 2003-03-13 | Hsin-Hsien Lee | Automatic calibration & synchronization for digital asynchronous communication |
| US7320035B2 (en) * | 2002-03-01 | 2008-01-15 | Sun Microsystems, Inc. | Object mutation determination for incremental state saves |
| US6973516B1 (en) * | 2002-05-20 | 2005-12-06 | Intransa, Inc. | Method and apparatus for a controller capable of supporting multiple protocols |
| US6931461B2 (en) * | 2002-06-14 | 2005-08-16 | Intel Corporation | Bus optimization based on network device communication |
| US8788377B2 (en) * | 2002-10-15 | 2014-07-22 | Ezshield, Inc. | System and method for providing recovery for victims of check fraud |
| US7061485B2 (en) | 2002-10-31 | 2006-06-13 | Hewlett-Packard Development Company, Lp. | Method and system for producing a model from optical images |
| US7174402B2 (en) * | 2003-04-07 | 2007-02-06 | The Boeing Company | Systems, network devices and methods for highly configurable peer-to-peer communications between network devices communicating via a common bus |
| US7131024B1 (en) * | 2003-09-24 | 2006-10-31 | Altera Corporation | Multiple transmit data rates in programmable logic device serial interface |
| DE10354494B4 (en) * | 2003-11-21 | 2019-04-11 | Siemens Healthcare Gmbh | Method for data and signal transmission between different subunits of a medical device |
| US20050182884A1 (en) * | 2004-01-22 | 2005-08-18 | Hofmann Richard G. | Multiple address two channel bus structure |
| US20050267960A1 (en) * | 2004-05-12 | 2005-12-01 | Searete Llc, A Limited Liability Corporation Of The State Of Delaware | Mote-associated log creation |
| WO2005099289A2 (en) * | 2004-03-31 | 2005-10-20 | Searete Llc | Mote-associated index creation |
| US9062992B2 (en) * | 2004-07-27 | 2015-06-23 | TriPlay Inc. | Using mote-associated indexes |
| US20050265388A1 (en) * | 2004-05-12 | 2005-12-01 | Searete Llc, A Limited Liability Corporation Of The State Of Delaware | Aggregating mote-associated log data |
| US8346846B2 (en) * | 2004-05-12 | 2013-01-01 | The Invention Science Fund I, Llc | Transmission of aggregated mote-associated log data |
| US7457834B2 (en) | 2004-07-30 | 2008-11-25 | Searete, Llc | Aggregation and retrieval of network sensor data |
| US7580730B2 (en) * | 2004-03-31 | 2009-08-25 | Searete, Llc | Mote networks having directional antennas |
| US7599696B2 (en) * | 2004-06-25 | 2009-10-06 | Searete, Llc | Frequency reuse techniques in mote-appropriate networks |
| US7389295B2 (en) * | 2004-06-25 | 2008-06-17 | Searete Llc | Using federated mote-associated logs |
| US8161097B2 (en) * | 2004-03-31 | 2012-04-17 | The Invention Science Fund I, Llc | Aggregating mote-associated index data |
| US8335814B2 (en) * | 2004-03-31 | 2012-12-18 | The Invention Science Fund I, Llc | Transmission of aggregated mote-associated index data |
| US20060079285A1 (en) * | 2004-03-31 | 2006-04-13 | Jung Edward K Y | Transmission of mote-associated index data |
| US20060064402A1 (en) * | 2004-07-27 | 2006-03-23 | Jung Edward K Y | Using federated mote-associated indexes |
| US20050256667A1 (en) * | 2004-05-12 | 2005-11-17 | Searete Llc, A Limited Liability Corporation Of The State Of Delaware | Federating mote-associated log data |
| US8200744B2 (en) * | 2004-03-31 | 2012-06-12 | The Invention Science Fund I, Llc | Mote-associated index creation |
| US8275824B2 (en) * | 2004-03-31 | 2012-09-25 | The Invention Science Fund I, Llc | Occurrence data detection and storage for mote networks |
| US20050227686A1 (en) * | 2004-03-31 | 2005-10-13 | Jung Edward K Y | Federating mote-associated index data |
| US20060062252A1 (en) * | 2004-06-30 | 2006-03-23 | Jung Edward K | Mote appropriate network power reduction techniques |
| US7929914B2 (en) * | 2004-03-31 | 2011-04-19 | The Invention Science Fund I, Llc | Mote networks using directional antenna techniques |
| US7536388B2 (en) * | 2004-03-31 | 2009-05-19 | Searete, Llc | Data storage for distributed sensor networks |
| US9261383B2 (en) | 2004-07-30 | 2016-02-16 | Triplay, Inc. | Discovery of occurrence-data |
| US7941188B2 (en) | 2004-03-31 | 2011-05-10 | The Invention Science Fund I, Llc | Occurrence data detection and storage for generalized sensor networks |
| US20060004888A1 (en) * | 2004-05-21 | 2006-01-05 | Searete Llc, A Limited Liability Corporation Of The State Delaware | Using mote-associated logs |
| US7487302B2 (en) * | 2004-10-01 | 2009-02-03 | Lockheed Martin Corporation | Service layer architecture for memory access system and method |
| US20060095724A1 (en) * | 2004-10-28 | 2006-05-04 | Microsoft Corporation | Message-passing processor |
| KR101212824B1 (en) | 2004-11-23 | 2012-12-14 | 엔테그리스, 아이엔씨. | System and method for a variable home position dispense system |
| US7342913B2 (en) * | 2004-11-23 | 2008-03-11 | The Boeing Company | Method for assigning slots in a mobile network |
| US7676342B2 (en) * | 2004-12-23 | 2010-03-09 | Asml Netherlands B.V. | Sensor assembly, digital serial bus and protocol, sensor network, and lithographic apparatus and system |
| US8041844B2 (en) * | 2004-12-29 | 2011-10-18 | Intel Corporation | Autodetection of a PCI express device operating at a wireless RF mitigation frequency |
| US7406555B2 (en) * | 2005-04-29 | 2008-07-29 | The Boeing Company | Systems and methods for multiple input instrumentation buses |
| US20060271321A1 (en) * | 2005-05-24 | 2006-11-30 | Visteon Global Technologies, Inc. | Initiating calibration mode of electronic control module |
| US7830899B2 (en) * | 2005-05-27 | 2010-11-09 | Agere Systems Inc. | Obtaining channel status in a network-based data transport architecture |
| US7904182B2 (en) | 2005-06-08 | 2011-03-08 | Brooks Automation, Inc. | Scalable motion control system |
| DE102005033211A1 (en) * | 2005-07-13 | 2007-01-18 | Deutsche Thomson-Brandt Gmbh | Method for determining the activity of a device in a network of distributed stations and network station for carrying out the method |
| US8065441B2 (en) | 2005-08-19 | 2011-11-22 | Intel Corporation | Method and apparatus for supporting universal serial bus devices in a virtualized environment |
| WO2007061956A2 (en) | 2005-11-21 | 2007-05-31 | Entegris, Inc. | System and method for a pump with reduced form factor |
| US8753097B2 (en) | 2005-11-21 | 2014-06-17 | Entegris, Inc. | Method and system for high viscosity pump |
| JP4845969B2 (en) * | 2005-12-02 | 2011-12-28 | エンテグリース,インコーポレイテッド | I/O SYSTEM, METHOD, AND APPARATUS FOR COUPLING A PUMP CONTROL DEVICE - Patent application |
| JP5366555B2 (en) | 2005-12-02 | 2013-12-11 | インテグリス・インコーポレーテッド | System and method for pressure compensation in a pump |
| WO2007067342A2 (en) | 2005-12-02 | 2007-06-14 | Entegris, Inc. | System and method for valve sequencing in a pump |
| US7850431B2 (en) * | 2005-12-02 | 2010-12-14 | Entegris, Inc. | System and method for control of fluid pressure |
| US7878765B2 (en) | 2005-12-02 | 2011-02-01 | Entegris, Inc. | System and method for monitoring operation of a pump |
| US7547049B2 (en) * | 2005-12-02 | 2009-06-16 | Entegris, Inc. | O-ring-less low profile fittings and fitting assemblies |
| US8083498B2 (en) | 2005-12-02 | 2011-12-27 | Entegris, Inc. | System and method for position control of a mechanical piston in a pump |
| CN101360678B (en) * | 2005-12-05 | 2013-01-02 | 恩特格里公司 | Error volume system and method for a pump |
| US7844762B2 (en) * | 2006-02-24 | 2010-11-30 | Silicon Image, Inc. | Parallel interface bus to communicate video data encoded for serial data links |
| US20070204323A1 (en) * | 2006-02-24 | 2007-08-30 | Rockwell Automation Technologies, Inc. | Auto-detection capabilities for out of the box experience |
| TWI402423B (en) | 2006-02-28 | 2013-07-21 | Entegris Inc | System and method for operation of a pump |
| US7684446B2 (en) * | 2006-03-01 | 2010-03-23 | Entegris, Inc. | System and method for multiplexing setpoints |
| US7494265B2 (en) * | 2006-03-01 | 2009-02-24 | Entegris, Inc. | System and method for controlled mixing of fluids via temperature |
| WO2007125472A2 (en) * | 2006-04-28 | 2007-11-08 | Nxp B.V. | Data processing apparatus |
| US8819326B1 (en) * | 2006-12-12 | 2014-08-26 | Spansion Llc | Host/client system having a scalable serial bus interface |
| KR20090004266A (en) * | 2007-07-06 | 2009-01-12 | 한국전자통신연구원 | Function module having its own control function and its operation control method and system using the same |
| US8362886B2 (en) * | 2007-09-26 | 2013-01-29 | Omega Patents, L.L.C. | Multi-controller data bus adaptor and associated methods |
| JP2010086318A (en) * | 2008-09-30 | 2010-04-15 | Digital Electronics Corp | Debugging system |
| US9122797B2 (en) * | 2008-09-30 | 2015-09-01 | Honeywell International Inc. | Deterministic remote interface unit emulator |
| US8352081B2 (en) | 2008-10-27 | 2013-01-08 | Lennox Industries Inc. | Communication protocol system and method for a distributed-architecture heating, ventilation and air conditioning network |
| US8798796B2 (en) | 2008-10-27 | 2014-08-05 | Lennox Industries Inc. | General control techniques in a heating, ventilation and air conditioning network |
| US8255086B2 (en) | 2008-10-27 | 2012-08-28 | Lennox Industries Inc. | System recovery in a heating, ventilation and air conditioning network |
| US8239066B2 (en) | 2008-10-27 | 2012-08-07 | Lennox Industries Inc. | System and method of use for a user interface dashboard of a heating, ventilation and air conditioning network |
| US8762666B2 (en) | 2008-10-27 | 2014-06-24 | Lennox Industries, Inc. | Backup and restoration of operation control data in a heating, ventilation and air conditioning network |
| US8725298B2 (en) | 2008-10-27 | 2014-05-13 | Lennox Industries, Inc. | Alarm and diagnostics system and method for a distributed architecture heating, ventilation and conditioning network |
| US9152155B2 (en) | 2008-10-27 | 2015-10-06 | Lennox Industries Inc. | Device abstraction system and method for a distributed-architecture heating, ventilation and air conditioning system |
| US8463443B2 (en) | 2008-10-27 | 2013-06-11 | Lennox Industries, Inc. | Memory recovery scheme and data structure in a heating, ventilation and air conditioning network |
| US8655491B2 (en) | 2008-10-27 | 2014-02-18 | Lennox Industries Inc. | Alarm and diagnostics system and method for a distributed architecture heating, ventilation and air conditioning network |
| US8802981B2 (en) | 2008-10-27 | 2014-08-12 | Lennox Industries Inc. | Flush wall mount thermostat and in-set mounting plate for a heating, ventilation and air conditioning system |
| US8560125B2 (en) | 2008-10-27 | 2013-10-15 | Lennox Industries | Communication protocol system and method for a distributed-architecture heating, ventilation and air conditioning network |
| US8694164B2 (en) | 2008-10-27 | 2014-04-08 | Lennox Industries, Inc. | Interactive user guidance interface for a heating, ventilation and air conditioning system |
| US9632490B2 (en) | 2008-10-27 | 2017-04-25 | Lennox Industries Inc. | System and method for zoning a distributed architecture heating, ventilation and air conditioning network |
| US8600558B2 (en) | 2008-10-27 | 2013-12-03 | Lennox Industries Inc. | System recovery in a heating, ventilation and air conditioning network |
| US9325517B2 (en) | 2008-10-27 | 2016-04-26 | Lennox Industries Inc. | Device abstraction system and method for a distributed-architecture heating, ventilation and air conditioning system |
| US8433446B2 (en) | 2008-10-27 | 2013-04-30 | Lennox Industries, Inc. | Alarm and diagnostics system and method for a distributed-architecture heating, ventilation and air conditioning network |
| US8548630B2 (en) | 2008-10-27 | 2013-10-01 | Lennox Industries, Inc. | Alarm and diagnostics system and method for a distributed-architecture heating, ventilation and air conditioning network |
| US9678486B2 (en) | 2008-10-27 | 2017-06-13 | Lennox Industries Inc. | Device abstraction system and method for a distributed-architecture heating, ventilation and air conditioning system |
| US9432208B2 (en) | 2008-10-27 | 2016-08-30 | Lennox Industries Inc. | Device abstraction system and method for a distributed architecture heating, ventilation and air conditioning system |
| US8655490B2 (en) | 2008-10-27 | 2014-02-18 | Lennox Industries, Inc. | System and method of use for a user interface dashboard of a heating, ventilation and air conditioning network |
| US8874815B2 (en) | 2008-10-27 | 2014-10-28 | Lennox Industries, Inc. | Communication protocol system and method for a distributed architecture heating, ventilation and air conditioning network |
| US8437877B2 (en) | 2008-10-27 | 2013-05-07 | Lennox Industries Inc. | System recovery in a heating, ventilation and air conditioning network |
| US8774210B2 (en) | 2008-10-27 | 2014-07-08 | Lennox Industries, Inc. | Communication protocol system and method for a distributed-architecture heating, ventilation and air conditioning network |
| US8352080B2 (en) | 2008-10-27 | 2013-01-08 | Lennox Industries Inc. | Communication protocol system and method for a distributed-architecture heating, ventilation and air conditioning network |
| US8788100B2 (en) | 2008-10-27 | 2014-07-22 | Lennox Industries Inc. | System and method for zoning a distributed-architecture heating, ventilation and air conditioning network |
| US9651925B2 (en) | 2008-10-27 | 2017-05-16 | Lennox Industries Inc. | System and method for zoning a distributed-architecture heating, ventilation and air conditioning network |
| US9268345B2 (en) | 2008-10-27 | 2016-02-23 | Lennox Industries Inc. | System and method of use for a user interface dashboard of a heating, ventilation and air conditioning network |
| US8661165B2 (en) | 2008-10-27 | 2014-02-25 | Lennox Industries, Inc. | Device abstraction system and method for a distributed architecture heating, ventilation and air conditioning system |
| US8452456B2 (en) | 2008-10-27 | 2013-05-28 | Lennox Industries Inc. | System and method of use for a user interface dashboard of a heating, ventilation and air conditioning network |
| US8892797B2 (en) | 2008-10-27 | 2014-11-18 | Lennox Industries Inc. | Communication protocol system and method for a distributed-architecture heating, ventilation and air conditioning network |
| US8452906B2 (en) | 2008-10-27 | 2013-05-28 | Lennox Industries, Inc. | Communication protocol system and method for a distributed-architecture heating, ventilation and air conditioning network |
| US9377768B2 (en) | 2008-10-27 | 2016-06-28 | Lennox Industries Inc. | Memory recovery scheme and data structure in a heating, ventilation and air conditioning network |
| US9261888B2 (en) | 2008-10-27 | 2016-02-16 | Lennox Industries Inc. | System and method of use for a user interface dashboard of a heating, ventilation and air conditioning network |
| US8977794B2 (en) | 2008-10-27 | 2015-03-10 | Lennox Industries, Inc. | Communication protocol system and method for a distributed-architecture heating, ventilation and air conditioning network |
| US8615326B2 (en) | 2008-10-27 | 2013-12-24 | Lennox Industries Inc. | System and method of use for a user interface dashboard of a heating, ventilation and air conditioning network |
| US8463442B2 (en) | 2008-10-27 | 2013-06-11 | Lennox Industries, Inc. | Alarm and diagnostics system and method for a distributed architecture heating, ventilation and air conditioning network |
| US8295981B2 (en) | 2008-10-27 | 2012-10-23 | Lennox Industries Inc. | Device commissioning in a heating, ventilation and air conditioning network |
| US8600559B2 (en) | 2008-10-27 | 2013-12-03 | Lennox Industries Inc. | Method of controlling equipment in a heating, ventilation and air conditioning network |
| US8437878B2 (en) | 2008-10-27 | 2013-05-07 | Lennox Industries Inc. | Alarm and diagnostics system and method for a distributed architecture heating, ventilation and air conditioning network |
| US8855825B2 (en) | 2008-10-27 | 2014-10-07 | Lennox Industries Inc. | Device abstraction system and method for a distributed-architecture heating, ventilation and air conditioning system |
| US8543243B2 (en) | 2008-10-27 | 2013-09-24 | Lennox Industries, Inc. | System and method of use for a user interface dashboard of a heating, ventilation and air conditioning network |
| US8564400B2 (en) | 2008-10-27 | 2013-10-22 | Lennox Industries, Inc. | Communication protocol system and method for a distributed-architecture heating, ventilation and air conditioning network |
| US8744629B2 (en) | 2008-10-27 | 2014-06-03 | Lennox Industries Inc. | System and method of use for a user interface dashboard of a heating, ventilation and air conditioning network |
| US8994539B2 (en) | 2008-10-27 | 2015-03-31 | Lennox Industries, Inc. | Alarm and diagnostics system and method for a distributed-architecture heating, ventilation and air conditioning network |
| US8442693B2 (en) | 2008-10-27 | 2013-05-14 | Lennox Industries, Inc. | System and method of use for a user interface dashboard of a heating, ventilation and air conditioning network |
| DE102008057445B4 (en) * | 2008-11-14 | 2020-10-08 | Phoenix Contact Gmbh & Co. Kg | Field bus system with spread spectrum |
| DE102009046995A1 (en) | 2008-11-21 | 2010-05-27 | Continental Teves Ag & Co. Ohg | Data transfer protocol |
| US8503484B2 (en) * | 2009-01-19 | 2013-08-06 | Honeywell International Inc. | System and method for a cross channel data link |
| US8275918B2 (en) * | 2009-04-01 | 2012-09-25 | Setra Systems, Inc. | Environmental condition monitor for alternative communication protocols |
| US8903572B1 (en) | 2009-08-11 | 2014-12-02 | The Boeing Company | Aircraft landing evaluation system |
| USD648641S1 (en) | 2009-10-21 | 2011-11-15 | Lennox Industries Inc. | Thin cover plate for an electronic system controller |
| USD648642S1 (en) | 2009-10-21 | 2011-11-15 | Lennox Industries Inc. | Thin cover plate for an electronic system controller |
| KR101566883B1 (en) * | 2009-12-29 | 2015-11-09 | 삼성전자주식회사 | Network apparatus for requesting data based contents name and method thereof |
| US8260444B2 (en) | 2010-02-17 | 2012-09-04 | Lennox Industries Inc. | Auxiliary controller of a HVAC system |
| CN101977244A (en) * | 2010-09-21 | 2011-02-16 | 华为终端有限公司 | Control method, device and system |
| DE102010041368A1 (en) * | 2010-09-24 | 2012-04-19 | Robert Bosch Gmbh | Method and subscriber station for the optimized transmission of data between subscriber stations of a bus system |
| US20120143438A1 (en) * | 2010-12-01 | 2012-06-07 | Nissan North America, Inc. | Fiber optic vehicle communication system |
| GB201114715D0 (en) * | 2011-08-25 | 2011-10-12 | Ultrasoc Technologies Ltd | A data processing apparatus and related methods of debugging processing circuitry |
| US8826081B2 (en) * | 2011-08-25 | 2014-09-02 | Ultrasoc Technologies, Ltd. | Data processing apparatus and related methods of debugging processing circuitry |
| FR2996019B1 (en) * | 2012-09-21 | 2014-10-31 | Thales Sa | CONTROLLER STRUCTURE OF DATA EXCHANGES AND GENERIC AND MULTI-ROLES COMMUNICATIONS |
| US9037693B2 (en) | 2013-01-03 | 2015-05-19 | The Boeing Company | Locating and addressing communication devices |
| US9904556B1 (en) | 2013-03-15 | 2018-02-27 | The Boeing Company | Executing a boot sequence including movement of data through a buffer memory |
| US9811455B2 (en) | 2013-03-15 | 2017-11-07 | The Boeing Company | Accessing different types of memory by respective distinct command with different timing requirements |
| US10089224B2 (en) | 2013-03-15 | 2018-10-02 | The Boeing Company | Write caching using volatile shadow memory |
| US9733638B2 (en) | 2013-04-05 | 2017-08-15 | Symbotic, LLC | Automated storage and retrieval system and control system thereof |
| US9989947B2 (en) * | 2013-08-20 | 2018-06-05 | Infineon Technologies Ag | Driver circuit for driving electromagnetic actuators |
| US9331868B2 (en) * | 2013-10-15 | 2016-05-03 | At&T Intellectual Property I, L.P. | Method of bus virtualization in computing machine intercommunications |
| BR112016015469A2 (en) * | 2013-12-30 | 2017-08-08 | Schneider Electric It Corp | SYSTEM AND METHOD TO AUTOMATICALLY SELECT BAUD RATE IN A CAN NETWORK |
| US9794335B2 (en) | 2014-06-02 | 2017-10-17 | The Boeing Company | Computer system synchronization |
| JP6054927B2 (en) * | 2014-09-22 | 2016-12-27 | ファナック株式会社 | Numerical control device with DNC operation function using multiple communication lines |
| KR101573637B1 (en) * | 2014-11-03 | 2015-12-01 | 현대자동차주식회사 | Method for CAN Communication with Improvement of Transmission Speed through Data Volume Extention |
| KR101645560B1 (en) * | 2015-02-16 | 2016-08-04 | 두산중공업 주식회사 | Data processing device |
| EP3068112B1 (en) * | 2015-03-11 | 2018-05-23 | Advanced Digital Broadcast S.A. | System and method for mac address acquisition |
| CN104702470B (en) * | 2015-03-31 | 2017-11-14 | 南京埃斯顿自动控制技术有限公司 | Baud rate online test method based on FPGA |
| US10184860B2 (en) | 2016-04-08 | 2019-01-22 | Infineon Technologies Ag | Control system for power train control |
| CN118548655A (en) | 2018-06-01 | 2024-08-27 | 斯蒂尔赫德液化天然气有限公司 | Liquefaction apparatus, methods, and systems |
| FR3090530B1 (en) * | 2018-12-20 | 2021-04-23 | Commissariat Energie Atomique | Electronic architecture for embedded system |
| US11379571B2 (en) * | 2019-07-12 | 2022-07-05 | Hewlett Packard Enterprise Development Lp | Presence terminal-based side channel communications |
| CN110413558A (en) * | 2019-07-15 | 2019-11-05 | 广芯微电子(广州)股份有限公司 | A kind of realization low-power consumption serial port module dynamic dividing method |
| US11132268B2 (en) | 2019-10-21 | 2021-09-28 | The Boeing Company | System and method for synchronizing communications between a plurality of processors |
| US12162628B2 (en) | 2019-12-27 | 2024-12-10 | Simmonds Precision Products, Inc. | Configurable sensing systems and methods for configuration |
| US11418422B1 (en) * | 2021-02-08 | 2022-08-16 | Mellanox Technologies, Ltd. | Received-signal rate detection |
| US12135970B2 (en) | 2023-03-17 | 2024-11-05 | The Boeing Company | System and method for synchronizing processing between a plurality of processors |
| US12204485B2 (en) * | 2023-04-27 | 2025-01-21 | Hamilton Sundstrand Corporation | Data refresh cycle for asynchronous device communication |
Family Cites Families (86)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3909724A (en) * | 1973-06-26 | 1975-09-30 | Addressograph Multigraph | Start bit detector and data strober for asynchronous receiver |
| GB1502184A (en) * | 1974-07-05 | 1978-02-22 | Sperry Rand Corp | Automatic flight control systems |
| DE2615306C2 (en) * | 1976-04-08 | 1982-06-03 | Vereinigte Flugtechnische Werke Gmbh, 2800 Bremen | Measurement data acquisition and processing system |
| US4241416A (en) * | 1977-07-01 | 1980-12-23 | Systron-Donner Corporation | Monitoring apparatus for processor controlled equipment |
| US4124778A (en) * | 1977-11-02 | 1978-11-07 | Minnesota Mining And Manufacturing Company | Digital frame synchronizing circuit |
| US4479179A (en) * | 1979-07-30 | 1984-10-23 | International Business Machines Corporation | Synchronous cycle steal mechanism for transferring data between a processor storage unit and a separate data handling unit |
| US4304001A (en) | 1980-01-24 | 1981-12-01 | Forney Engineering Company | Industrial control system with interconnected remotely located computer control units |
| US4449202A (en) * | 1981-12-04 | 1984-05-15 | Ncr Corporation | Full duplex integrated circuit communication controller |
| US4449119A (en) * | 1981-12-14 | 1984-05-15 | International Business Machines Corporation | Self-clocking serial decoder |
| US4964040A (en) * | 1983-01-03 | 1990-10-16 | United States Of America As Represented By The Secretary Of The Navy | Computer hardware executive |
| US4688168A (en) | 1984-08-23 | 1987-08-18 | Picker International Inc. | High speed data transfer method and apparatus |
| US5008877A (en) * | 1986-11-25 | 1991-04-16 | Raychem Corp. | Optical signal recovery for distribution communication system |
| US4785469A (en) * | 1987-02-12 | 1988-11-15 | Advanced Micro Devices, Inc. | Processor to peripheral interface for asynchronous or synchronous applications |
| DE3730468A1 (en) | 1987-09-08 | 1989-03-16 | Bergmann Kabelwerke Ag | ON-BOARD NETWORK FOR MOTOR VEHICLES AND METHOD FOR OPERATING THE ON-BOARD NETWORK |
| US5113498A (en) * | 1987-11-10 | 1992-05-12 | Echelon Corporation | Input/output section for an intelligent cell which provides sensing, bidirectional communications and control |
| US4969147A (en) | 1987-11-10 | 1990-11-06 | Echelon Systems Corporation | Network and intelligent cell for providing sensing, bidirectional communications and control |
| US4918690A (en) * | 1987-11-10 | 1990-04-17 | Echelon Systems Corp. | Network and intelligent cell for providing sensing, bidirectional communications and control |
| US5020020A (en) * | 1989-04-07 | 1991-05-28 | Digital Equipment Corporation | Computer interconnect system with transmit-abort function |
| US4942147A (en) * | 1989-05-08 | 1990-07-17 | Union Carbide Chemicals And Plastics Company, Inc. | Catalyst system containing an autoacceleration inhibitor |
| JP2702773B2 (en) * | 1989-05-10 | 1998-01-26 | 松下電器産業株式会社 | Data monitoring device |
| US4996684A (en) * | 1989-07-06 | 1991-02-26 | Northern Telecom Limited | Electronic systems and effective reduction of electromagnetic interference energy propagation from electronic systems |
| AU7305491A (en) * | 1990-01-29 | 1991-08-21 | Teraplex, Inc. | Architecture for minimal instruction set computing system |
| CA2075048C (en) * | 1990-01-30 | 1999-08-17 | Gregory A. Pascucci | Networked facilities management system |
| GB9006661D0 (en) | 1990-03-24 | 1990-05-23 | Reflex Manufacturing Systems L | Network-field interface for manufacturing systems |
| US5138709A (en) | 1990-04-11 | 1992-08-11 | Motorola, Inc. | Spurious interrupt monitor |
| US5201056A (en) * | 1990-05-02 | 1993-04-06 | Motorola, Inc. | RISC microprocessor architecture with multi-bit tag extended instructions for selectively attaching tag from either instruction or input data to arithmetic operation output |
| US5223610A (en) * | 1990-05-18 | 1993-06-29 | The Scripps Research Institute | Cholera toxin gene regulated by growth hormone promoter |
| US5367678A (en) | 1990-12-06 | 1994-11-22 | The Regents Of The University Of California | Multiprocessor system having statically determining resource allocation schedule at compile time and the using of static schedule with processor signals to control the execution time dynamically |
| US5426741A (en) * | 1991-02-20 | 1995-06-20 | Digital Equipment Corporation | Bus event monitor |
| JPH04305754A (en) * | 1991-04-02 | 1992-10-28 | Furukawa Electric Co Ltd:The | Multiplex transmission system |
| US5274783A (en) | 1991-06-28 | 1993-12-28 | Digital Equipment Corporation | SCSI interface employing bus extender and auxiliary bus |
| US5625821A (en) * | 1991-08-12 | 1997-04-29 | International Business Machines Corporation | Asynchronous or synchronous operation of event signaller by event management services in a computer system |
| US5223806A (en) * | 1991-08-23 | 1993-06-29 | Digital Equipment Corporation | Method and apparatus for reducing electromagnetic interference and emission associated with computer network interfaces |
| US5291614A (en) * | 1991-09-03 | 1994-03-01 | International Business Machines Corporation | Real-time, concurrent, multifunction digital signal processor subsystem for personal computers |
| US5469545A (en) * | 1991-10-03 | 1995-11-21 | Compaq Computer Corp. | Expandable communication system with data flow control |
| US5251208A (en) | 1991-12-19 | 1993-10-05 | At&T Bell Laboratories | Digital signal processor synchronous network |
| EP0551191B1 (en) * | 1992-01-09 | 2000-04-12 | Cabletron Systems, Inc. | Apparatus and method for transferring data to and from host system |
| US5390351A (en) * | 1992-03-06 | 1995-02-14 | Pitney Bowes Inc. | System for communicating with plural nodes in predetermined intervals depended on integers assigned and changed based upon configuration thereof |
| US5627858A (en) * | 1992-07-20 | 1997-05-06 | Telefonaktiebolaget L M Ericsson | Multi-channel autobauding circuit |
| TW276312B (en) * | 1992-10-20 | 1996-05-21 | Cirrlis Logic Inc | |
| US5437060A (en) * | 1993-06-01 | 1995-07-25 | Itronix Corporation | Apparatus and method for reducing interference in a communications system |
| US5445128A (en) * | 1993-08-27 | 1995-08-29 | Detroit Diesel Corporation | Method for engine control |
| US5754780A (en) * | 1994-01-19 | 1998-05-19 | Tokyo Electron Limited | Apparatus and method for performing serial communication between master and slave devices |
| GB2288954B (en) * | 1994-04-15 | 1998-10-14 | Vlsi Technology Inc | Method and apparatus for providing programmable serial communications |
| US5654983A (en) * | 1994-06-10 | 1997-08-05 | Hayes Microcomputer Products, Inc. | Method and apparatus of operating data communications equipment in command mode and autobauding |
| US5557634A (en) * | 1994-10-14 | 1996-09-17 | International Business Machines Corporation | Multiprotocol directed infrared communication controller |
| US5615404A (en) | 1994-10-31 | 1997-03-25 | Intel Corporation | System having independently addressable bus interfaces coupled to serially connected multi-ported signal distributors generating and maintaining frame based polling schedule favoring isochronous peripherals |
| US5742847A (en) | 1994-10-31 | 1998-04-21 | Intel Corporation | M&A for dynamically generating and maintaining frame based polling schedules for polling isochronous and asynchronous functions that guaranty latencies and bandwidths to the isochronous functions |
| AU703388B2 (en) | 1994-10-31 | 1999-03-25 | Intel Corporation | Method and apparatus for exchanging data, status and commands over an hierarchical serial bus assembly using communication packets |
| US5623610A (en) | 1994-10-31 | 1997-04-22 | Intel Corporation | System for assigning geographical addresses in a hierarchical serial bus by enabling upstream port and selectively enabling disabled ports at power on/reset |
| US5737356A (en) * | 1995-03-31 | 1998-04-07 | General Electric Company | Spectral spreading apparatus for reducing electromagnetic radiation from a transmission line used for high data rate communication in a computerized tomography system |
| US5708817A (en) * | 1995-05-31 | 1998-01-13 | Apple Computer, Inc. | Programmable delay of an interrupt |
| US5734329A (en) * | 1995-07-13 | 1998-03-31 | Dell Usa L.P. | Method and apparatus for superimposing self-clocking multifunctional communications on a static digital signal line |
| KR0146762B1 (en) * | 1995-07-24 | 1998-08-17 | 양승택 | Arbitration exchange device and method in parallel common bus type high speed packet exchange system |
| FR2737826B1 (en) * | 1995-08-08 | 1997-09-12 | Sextant Avionique | COMMUNICATION METHOD ON A COHABITATION BUS OF DIFFERENT FEEDS |
| KR0147471B1 (en) * | 1995-11-24 | 1998-08-17 | 문정환 | Ethernet with the capability of sensing the data rate |
| JP3647955B2 (en) | 1996-01-23 | 2005-05-18 | 三菱電機株式会社 | Operation board, remote I/O communication control method |
| JPH09251437A (en) | 1996-03-18 | 1997-09-22 | Toshiba Corp | Computer device and continuous data server device |
| US5815516A (en) | 1996-04-05 | 1998-09-29 | International Business Machines Corporation | Method and apparatus for producing transmission control protocol checksums using internet protocol fragmentation |
| US5801602A (en) * | 1996-04-30 | 1998-09-01 | 3Com Corporation | Isolation and signal filter transformer |
| JP3117000B2 (en) * | 1997-02-21 | 2000-12-11 | 株式会社デンソー | Communication system and electronic control device used therein |
| US6013108A (en) * | 1997-03-18 | 2000-01-11 | Endevco Corporation | Intelligent sensor system with network bus |
| JP3977484B2 (en) | 1997-05-08 | 2007-09-19 | 矢崎総業株式会社 | Status information management method and communication system |
| US5982837A (en) * | 1997-06-16 | 1999-11-09 | Lsi Logic Corporation | Automatic baud rate detector |
| US6904480B1 (en) * | 1997-12-17 | 2005-06-07 | Intel Corporation | Testing a bus using bus specific instructions |
| US6452938B1 (en) * | 1998-02-26 | 2002-09-17 | 3Com Corporation | System and method to reduce electromagnetic interference emissions in a network interface |
| US6134676A (en) * | 1998-04-30 | 2000-10-17 | International Business Machines Corporation | Programmable hardware event monitoring method |
| US6201996B1 (en) | 1998-05-29 | 2001-03-13 | Control Technology Corporationa | Object-oriented programmable industrial controller with distributed interface architecture |
| US6724772B1 (en) * | 1998-09-04 | 2004-04-20 | Advanced Micro Devices, Inc. | System-on-a-chip with variable bandwidth |
| US6195724B1 (en) | 1998-11-16 | 2001-02-27 | Infineon Technologies Ag | Methods and apparatus for prioritization of access to external devices |
| US6163586A (en) * | 1998-12-01 | 2000-12-19 | Philips Electronics North America Corp. | Autobaud/autoecho method |
| JP2000231403A (en) * | 1999-02-09 | 2000-08-22 | Keyence Corp | Remote input and output system and slave device for the same |
| US6134485A (en) * | 1999-02-18 | 2000-10-17 | The Boeing Company | System and method for measuring physical parameters using an integrated multisensor system |
| DE19911464A1 (en) * | 1999-03-15 | 2000-09-28 | Siemens Ag | Method and arrangement for the automatic acquisition of clock signals for sampling data signals of different data rates using a phase locked loop |
| JP3366277B2 (en) * | 1999-03-25 | 2003-01-14 | 日本電気株式会社 | AT command receiving circuit |
| EP1188285B1 (en) | 1999-04-13 | 2012-06-13 | Broadcom Corporation | Gateway with voice |
| EP1746782B1 (en) * | 1999-05-05 | 2009-10-14 | Freescale Semiconductors, Inc. | Method and system for communicating data on a serial bus |
| US6356809B1 (en) * | 1999-06-11 | 2002-03-12 | Cbi Systems Corporation | Electro-statically shielded processing module |
| US6205509B1 (en) * | 1999-07-15 | 2001-03-20 | 3Com Corporation | Method for improving interrupt response time |
| US6556817B1 (en) * | 1999-12-13 | 2003-04-29 | Motorola, Inc. | Method and apparatus for selectively communicating in a wireless communication system based on varying time incremental costs of communication |
| US6658515B1 (en) * | 2000-01-25 | 2003-12-02 | Dell Usa, L.P. | Background execution of universal serial bus transactions |
| US6273771B1 (en) | 2000-03-17 | 2001-08-14 | Brunswick Corporation | Control system for a marine vessel |
| US6574515B1 (en) * | 2000-05-12 | 2003-06-03 | Rosemount Inc. | Two-wire field-mounted process device |
| US6879820B2 (en) * | 2000-07-12 | 2005-04-12 | Telefonaktiebolaget Lm Ericsson (Publ) | Charging in communication networks having split control planes and user planes |
| US6674725B2 (en) * | 2001-03-05 | 2004-01-06 | Qwest Communications International, Inc. | Method and system for dynamic service classification and integrated service control |
| EP1641297A1 (en) * | 2003-06-27 | 2006-03-29 | Mitsubishi Denki Kabushiki Kaisha | Mobile communication system, mobile device, and network most significant device |
-
2000
- 2000-12-12 US US09/735,146 patent/US6708239B1/en not_active Expired - Lifetime
-
2001
- 2001-11-05 EP EP12178821A patent/EP2544063A3/en not_active Ceased
- 2001-11-05 EP EP20120178794 patent/EP2544062A3/en not_active Ceased
- 2001-11-05 EP EP12178641.2A patent/EP2544060B1/en not_active Expired - Lifetime
- 2001-11-05 AU AU2002241516A patent/AU2002241516A1/en not_active Abandoned
- 2001-11-05 EP EP10186254.8A patent/EP2317411B1/en not_active Expired - Lifetime
- 2001-11-05 EP EP01988185.3A patent/EP1356629B1/en not_active Expired - Lifetime
- 2001-11-05 WO PCT/US2001/044144 patent/WO2002047324A2/en active Application Filing
- 2001-11-05 JP JP2002548925A patent/JP3995594B2/en not_active Expired - Lifetime
- 2001-11-05 EP EP12178685.9A patent/EP2544061B1/en not_active Expired - Lifetime
-
2003
- 2003-12-03 US US10/726,918 patent/US7277970B2/en not_active Expired - Lifetime
- 2003-12-04 US US10/728,349 patent/US7058737B2/en not_active Expired - Lifetime
- 2003-12-04 US US10/727,414 patent/US7096285B2/en not_active Expired - Lifetime
- 2003-12-05 US US10/729,560 patent/US7099965B2/en not_active Expired - Lifetime
- 2003-12-06 US US10/728,664 patent/US6938106B2/en not_active Expired - Lifetime
-
2007
- 2007-04-23 JP JP2007113395A patent/JP4709800B2/en not_active Expired - Lifetime
- 2007-09-10 US US11/852,706 patent/US7552256B2/en not_active Expired - Lifetime
Cited By (10)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| WO2005057861A1 (en) | 2003-12-12 | 2005-06-23 | Mitsubishi Denki Kabushiki Kaisha | Data collection system |
| EP1693987A4 (en) * | 2003-12-12 | 2009-07-29 | Mitsubishi Electric Corp | Data collection system |
| CN101895450A (en) * | 2009-05-20 | 2010-11-24 | 株式会社瑞萨科技 | Conductor integrated circuit device |
| EP2254279A3 (en) * | 2009-05-20 | 2013-08-14 | Renesas Electronics Corporation | Semiconductor integrated circuit device |
| EP2685671A1 (en) * | 2009-05-20 | 2014-01-15 | Renesas Electronics Corporation | Semiconductor integrated circuit device |
| EP2685672A1 (en) * | 2009-05-20 | 2014-01-15 | Renesas Electronics Corporation | Semiconductor integrated circuit device |
| US9575525B2 (en) | 2009-05-20 | 2017-02-21 | Renesas Electronics Corporation | Semiconductor integrated circuit device |
| US9804658B2 (en) | 2009-05-20 | 2017-10-31 | Renesas Electronics Corporation | Semiconductor integrated circuit device |
| US10126797B2 (en) | 2009-05-20 | 2018-11-13 | Renesas Electronics Corporation | Method of controlling electronic controller units |
| US10359823B2 (en) | 2009-05-20 | 2019-07-23 | Renesas Electronics Corporation | Method of controlling electronic controller units |
Also Published As
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7277970B2 (en) | Network device interface for digitally interfacing data channels to a controller via a network | |
| EP1340153B1 (en) | Network controller for digitally controlling remote devices via a common bus | |
| US7689687B2 (en) | Communication controller with automatic time stamping | |
| US5619722A (en) | Addressable communication port expander | |
| US6557062B1 (en) | System and method for low-noise control of radio frequency devices | |
| EP1679610B1 (en) | System and methods for establishing peer-to-peer communications between network devices communicating via a common bus | |
| US20060023691A1 (en) | Communication controller for coordinating transmission of scheduled and unscheduled messages | |
| EP1892890A2 (en) | Network controller for digitally controlling remote devices via a common bus | |
| JP4938667B2 (en) | Discarding messages partially received from the data queue | |
| Eccles | IEEE P1451. 3 A Standard for Networked Transducers |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| AK | Designated states |
Kind code of ref document: A2 Designated state(s): AE AG AL AM AT AU AZ BA BB BG BR BY BZ CA CH CN CR CU CZ DE DK DM DZ EE ES FI GB GD GE GH GM HR HU ID IL IN IS JP KE KG KP KR KZ LC LK LR LS LT LU LV MA MD MG MK MN MW MX MZ NO NZ PL PT RO RU SD SE SG SI SK SL TJ TM TR TT TZ UA UG UZ VN YU ZA ZW |
|
| AL | Designated countries for regional patents |
Kind code of ref document: A2 Designated state(s): GH GM KE LS MW MZ SD SL SZ TZ UG ZW AM AZ BY KG KZ MD RU TJ TM AT BE CH CY DE DK ES FI FR GB GR IE IT LU MC NL PT SE TR BF BJ CF CG CI CM GA GN GQ GW ML MR NE SN TD TG |
|
| 121 | Ep: the epo has been informed by wipo that ep was designated in this application | ||
| DFPE | Request for preliminary examination filed prior to expiration of 19th month from priority date (pct application filed before 20040101) | ||
| WWE | Wipo information: entry into national phase |
Ref document number: 2002548925 Country of ref document: JP |
|
| WWE | Wipo information: entry into national phase |
Ref document number: 2001988185 Country of ref document: EP |
|
| REG | Reference to national code |
Ref country code: DE Ref legal event code: 8642 |
|
| WWP | Wipo information: published in national office |
Ref document number: 2001988185 Country of ref document: EP |