US8654828B2 - Mechanism for the measurement of DC properties of a signal path - Google Patents
Mechanism for the measurement of DC properties of a signal path Download PDFInfo
- Publication number
- US8654828B2 US8654828B2 US13/887,186 US201313887186A US8654828B2 US 8654828 B2 US8654828 B2 US 8654828B2 US 201313887186 A US201313887186 A US 201313887186A US 8654828 B2 US8654828 B2 US 8654828B2
- Authority
- US
- United States
- Prior art keywords
- signal
- impairments
- frequency
- transmitter
- receiver
- Prior art date
- Legal status (The legal status is an assumption and is not a legal conclusion. Google has not performed a legal analysis and makes no representation as to the accuracy of the status listed.)
- Active
Links
Images









































Classifications
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04B—TRANSMISSION
- H04B17/00—Monitoring; Testing
- H04B17/10—Monitoring; Testing of transmitters
- H04B17/11—Monitoring; Testing of transmitters for calibration
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04B—TRANSMISSION
- H04B15/00—Suppression or limitation of noise or interference
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04B—TRANSMISSION
- H04B17/00—Monitoring; Testing
- H04B17/20—Monitoring; Testing of receivers
- H04B17/21—Monitoring; Testing of receivers for calibration; for correcting measurements
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04B—TRANSMISSION
- H04B17/00—Monitoring; Testing
- H04B17/30—Monitoring; Testing of propagation channels
- H04B17/309—Measuring or estimating channel quality parameters
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04B—TRANSMISSION
- H04B17/00—Monitoring; Testing
- H04B17/30—Monitoring; Testing of propagation channels
- H04B17/391—Modelling the propagation channel
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L1/00—Arrangements for detecting or preventing errors in the information received
- H04L1/24—Testing correct operation
- H04L1/248—Distortion measuring systems
-
- H—ELECTRICITY
- H04—ELECTRIC COMMUNICATION TECHNIQUE
- H04L—TRANSMISSION OF DIGITAL INFORMATION, e.g. TELEGRAPHIC COMMUNICATION
- H04L25/00—Baseband systems
- H04L25/02—Details ; arrangements for supplying electrical power along data transmission lines
- H04L25/08—Modifications for reducing interference; Modifications for reducing effects due to line faults ; Receiver end arrangements for detecting or overcoming line faults
Definitions
- the present invention relates to the field of signal processing, and more particularly to systems and methods for measurement and correction of I/Q impairments in a receiver device or a transmitter device.
- a transmitter receives a complex digital signal I(n)+jQ(n), converts the complex digital signal into an analog signal I(t)+jQ(t), and upconverts the analog signal using an I/Q modulator.
- the upconverted signal is transmitted onto a channel.
- a pure complex exponential tone supplied to the I/Q modulator will result in a pure tone being transmitted.
- I/Q impairments in the transmitter will cause the I channel and Q channel to have different gains and different phase displacements. Such distortions imply among other things that the transmitted signal will have unwanted energy at a frequency equal to the negative of the tone frequency. Depending on the communication standard, this unwanted “image” results in potential skew on the constellation diagram or an artificial noise floor.
- Receivers have a similar problem.
- the complex signal appearing at the output of the receiver's I/Q demodulator will include unwanted signal energy at frequency ⁇ f in addition to energy at frequency f.
- the difficulty arises due to imbalances in gain and phase between the I channel and the Q channel.
- I/Q impairments may be difficult to obtain.
- to measure the I/Q impairments of a transmitter involves directing the transmitter to transmit a signal to a receiver.
- the receiver estimates the transmitter's I/Q impairments based on its received signal.
- the receiver's I/Q demodulator corrupts the estimates with its own I/Q impairments.
- the signal path between the transmitter's I/Q modulator and the receiver's I/Q demodulator also introduces distortion to the estimates.
- the present patent discloses mechanisms capable of compensating for I/Q impairments in a transmitter and/or a receiver.
- the parameters used to perform the compensation are computed based on measured or estimated values of the I/Q impairments.
- the parameters used to compensate for the I/Q impairments of a transmitter (or receiver) are computed based on measured or estimated values of those impairments.
- Any known technique may be used to measure or estimate the I/Q impairments of the transmitter or the receiver or a series combination of the transmitter and receiver, including, but not limited to, the techniques disclosed herein.
- a system and method for compensating for I/Q impairments of a receiver may involve the following operations.
- An analog input signal is received from a transmission medium.
- I/Q demodulation is performed on the analog input signal to produce an analog inphase (I) signal and an analog quadrature (Q) signal.
- the analog I signal and the analog Q signal are then digitized to produce respectively a digital I signal and a digital Q signal.
- the digital I signal and the digital Q signal are filtered in accordance with a 2 ⁇ 2 matrix of digital filters to produce a filtered digital I signal and a filtered digital Q signal.
- the filtering may be performed on a programmable hardware element such as an FPGA, or in dedicated digital circuitry such as an ASIC, or in software on a processor, etc.
- the 2 ⁇ 2 matrix of digital filters at least partially compensates for I/Q impairments of the receiver over a range of frequencies.
- the frequency response of at least one of the diagonal components of the 2 ⁇ 2 matrix is computed based on measurements of the I/Q impairments as a function of frequency and the measurements as a function of the negative of frequency.
- the measurements of the receiver's I/Q impairments may be obtained by any known method. The present document describes a number of methods for obtaining such measurements.
- the frequency response of at least one of the non-diagonal components of the 2 ⁇ 2 matrix is computed based on the measurements as a function of frequency and the measurements as a function of the negative of frequency.
- the receiver's I/Q impairments over positive frequencies and the receiver's I/Q impairments over negative frequencies may be assumed to be functionally related.
- the frequency responses of the 2 ⁇ 2 matrix may be computed as follows. The frequency response of at least one of the diagonal components of the 2 ⁇ 2 matrix at the arbitrary frequency f may be computed based only on a measurement of the I/Q impairments at the frequency f (or alternatively, only on a measurement of the I/Q impairments at the frequency ⁇ f).
- the frequency response of at least one of the non-diagonal components of the 2 ⁇ 2 matrix at the frequency f may be computed based only on the measurement of the I/Q impairments at the frequency f (or alternatively, only on the measurement of the I/Q impairments at the frequency ⁇ f).
- the gain imbalance is assumed to be even and the phase skew is assumed to be odd.
- both non-diagonal components of the 2 ⁇ 2 matrix may be set to zero; one of the diagonal components may correspond to a pure pass-through filter (i.e., unity frequency response); and a frequency response of the other diagonal component at the arbitrary frequency f may be computed based only on a measurement of the I/Q impairments at the frequency f (or alternatively, only on a measurement of the I/Q impairments at the frequency ⁇ f).
- both diagonal components of the 2 ⁇ 2 matrix may correspond to pure pass-through filters; one of the non-diagonal components may be set to zero; and a frequency response of the other non-diagonal component at the arbitrary frequency f may be computed based only on a measurement of the I/Q impairments at the frequency f (or alternatively, only on a measurement of the I/Q impairments at the frequency ⁇ f).
- a system and method for configuring a receiver to at least partially compensate for I/Q impairments of the receiver may involve the following operations. Measurements of the I/Q impairments of the receiver over a frequency band are received (or accessed from memory). A 2 ⁇ 2 matrix of digital filters is computed based on the measurements. The 2 ⁇ 2 matrix of digital filters is computed to achieve at least partial compensation for the I/Q impairments of the receiver over the frequency band. The frequency response of at least one of the diagonal components of the 2 ⁇ 2 matrix is computed based on the measurements as a function of frequency and the measurements as a function of the negative of frequency.
- the frequency response of at least one of the non-diagonal components of the 2 ⁇ 2 matrix is computed based on the measurements as a function of frequency and the measurements as a function of the negative of frequency.
- a digital circuit is then programmed to implement the 2 ⁇ 2 matrix of digital filters. When so programmed, the digital circuit is configured to at least partially compensate for the I/Q impairments of the receiver over the frequency band.
- the digital circuit may be realized in any of a wide variety of forms.
- the digital circuit may be realized by a programmable hardware element, or by dedicated digital circuitry such as an ASIC, or by a processor in response to the execution of program instructions. (The digital circuit may be incorporated as part of the receiver, or as part of another system, e.g., a host computer or controller board).
- a system and method for operating a transmitter so as to achieve I/Q impairment compensation may involve the following operations.
- a digital inphase (I) signal and a digital quadrature (Q) signal are received.
- the digital I signal and the digital Q signal is filtered in accordance with a 2 ⁇ 2 matrix of digital filters to produce a filtered digital I signal and a filtered digital Q signal.
- the 2 ⁇ 2 matrix of digital filters at least partially pre-compensates for I/Q impairments of the transmitter over a range of frequencies.
- the frequency response of at least one of the diagonal components of the 2 ⁇ 2 matrix is computed based on measurements of the I/Q impairments as a function of frequency and the measurements as a function of the negative of frequency. (The measurements of the transmitter's I/Q impairments may be obtained by any known method.
- the present document describes a number of methods for obtaining such measurements.
- the frequency response of at least one of the non-diagonal components of the 2 ⁇ 2 matrix is computed based on the measurements as a function of frequency and the measurements as a function of the negative of frequency.
- the filtered digital I and Q signals may then be converted to analog form in order to obtain respective analog I and Q signals.
- I/Q modulation may be performed on the analog I and Q signals to produce a modulated analog signal.
- the transmitter's I/Q impairments over positive frequencies and the transmitter's I/Q impairments over negative frequencies may be assumed to be functionally related.
- the computation of the 2 ⁇ 2 matrix of digital filters may be simplified as follows. The frequency response of at least one of the diagonal components of the 2 ⁇ 2 matrix at the arbitrary frequency f in the frequency range may be computed based only on a measurement of the I/Q impairments at the frequency f (or alternatively, only on a measurement of the I/Q impairments at the frequency ⁇ f).
- the frequency response of at least one of the non-diagonal components of the 2 ⁇ 2 matrix at the frequency f may be computed based only on the measurement of the I/Q impairments at the frequency f (or alternatively, only on the measurement of the I/Q impairments at the frequency ⁇ f).
- the gain imbalance is assumed to be even and the phase skew is assumed to be odd.
- both non-diagonal components of the 2 ⁇ 2 matrix may be set to zero; one of the diagonal components may correspond to a pure pass-through filter (i.e., unity frequency response); and a frequency response of the other diagonal component at the arbitrary frequency f may be computed based only on a measurement of the I/Q impairments at the frequency f (or alternatively, only on a measurement of the I/Q impairments at the frequency ⁇ f).
- both diagonal components of the 2 ⁇ 2 matrix may correspond to pure pass-through filters; one of the non-diagonal components may be set to zero; and a frequency response of the other non-diagonal component at the arbitrary frequency f may be computed based only on a measurement of the I/Q impairments at the frequency f (or alternatively, only on a measurement of the I/Q impairments at the frequency ⁇ f).
- a system and method for configuring a transmitter to at least partially compensate for I/Q impairments of the transmitter may involve the following operations.
- Measurements of the I/Q impairments of the transmitter over a frequency range are received (or accessed from memory).
- a 2 ⁇ 2 matrix of digital filters is computed based on the measurements.
- the 2 ⁇ 2 matrix of digital filters is computed to achieve at least partial pre-compensation for the I/Q impairments of the transmitter.
- the frequency response of at least one of the diagonal components of the 2 ⁇ 2 matrix is computed based on the measurements as a function of frequency and the measurements as a function of the negative of frequency.
- the frequency response of at least one of the non-diagonal components of the 2 ⁇ 2 matrix is computed based on the measurements as a function of frequency and the measurements as a function of the negative of frequency.
- a digital circuit is then programmed to implement the 2 ⁇ 2 matrix of digital filters. When so programmed, the digital circuit is configured to at least partially pre-compensate for the I/Q impairments of the transmitter.
- a system and method for operating a transmitter so as to achieve at least partial compensation for I/Q impairments of the transmitter at a given frequency f may involve the following operations.
- a digital inphase (I) signal and a digital quadrature (Q) signal are received.
- the digital I signal and the digital Q signal are transformed in accordance with a 2 ⁇ 2 matrix of constants to produce a resultant digital I signal and a resultant digital Q signal.
- the vector signal comprising the digital I signal and digital Q signal is multiplied by the 2 ⁇ 2 matrix.
- the resultant digital I and Q signals are converted to analog form in order to obtain respective analog I and Q signals.
- I/Q modulation is performed on the analog I and Q signals to produce a modulated analog signal.
- the 2 ⁇ 2 matrix is configured to at least partially pre-compensate for the I/Q impairments at frequency f.
- a first of the constants corresponding a diagonal element of the 2 ⁇ 2 matrix, is computed based on a measurement of the I/Q impairments at frequency f and a measurement of the I/Q impairments at frequency ⁇ f Furthermore, a second of the constants, corresponding to a non-diagonal element of the 2 ⁇ 2 matrix, is computed based on the measurement at frequency f and the measurement at frequency ⁇ f.
- a method for determining (i.e., measuring) I/Q impairments of a transmitter may involve the following actions.
- the method involves performing a set of operations.
- the set of operations includes: (a) directing that a complex exponential tone at frequency f be supplied to the transmitter; (b) supplying a pre-compensation transformation to a pre-compensation circuit of the transmitter, where the pre-compensation circuit is configured to apply the pre-compensation transformation to the complex exponential tone to obtain an adjusted complex signal, where the pre-compensation transformation is configured to pre-compensate for a current estimate of the I/Q impairments of the transmitter, where the transmitter is configured to transmit a transmit signal based on the adjusted complex signal, where a receiver is configured to receive the transmit signal and capture a sampled complex signal representing the received transmit signal; (c) computing raw I/Q impairments based on the sampled complex signal; (d) transforming the raw I/Q impairments to determine transformed I/Q impairments, where said transforming removes measured I/Q impairments of the receiver from the raw I/Q impairments; (e) removing a current estimate of a signal path from the transformed I
- a method for determining I/Q impairments of a transmitter may involve the following actions.
- the method may include configuring a local oscillator (LO) of the transmitter and a local oscillator (LO) of the receiver to be phase locked to a common reference and so that a frequency of the receiver's LO minus a frequency of the transmitter's LO is equal (e.g., exactly equal) to an amount ⁇ LO.
- LO local oscillator
- LO local oscillator
- the method may also include performing a set of operations, where the set of operations includes: (a) directing that a complex exponential tone at frequency f be supplied to the transmitter; (b) supplying a pre-compensation transformation to a pre-compensation circuit of the transmitter, where the pre-compensation circuit is configured to apply the pre-compensation transformation to the complex exponential tone in order to obtain an adjusted complex signal, where the pre-compensation transformation is configured to pre-compensate for a current estimate of the I/Q impairments of the transmitter, where the transmitter is configured to transmit a transmit signal based on the adjusted complex signal, where a receiver is configured to receive the transmit signal and to capture a sampled complex signal representing the received transmit signal; (c) frequency shifting the sampled complex signal by the amount ⁇ LO to obtain a frequency-shifted signal; (d) computing raw I/Q impairments at frequency f based on the frequency-shifted signal; (e) removing a current estimate of a signal path from the raw I/Q impairments at frequency f to obtain path-
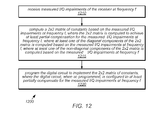
- a method for determining (i.e., measuring) I/Q impairments of a receiver may involve the following actions.
- the method may involve directing that an input signal be supplied to the receiver, where the input signal includes an isolated tone at displacement frequency f and includes a void interval around displacement frequency ⁇ f (In one embodiment, the receiver includes a calibration tone generator that is configured to generate the input signal.) The receiver is configured to demodulate the input signal in order to obtain a sampled complex signal.
- the displacement frequencies f and ⁇ f are displacements relative to a local oscillator frequency of the receiver.
- the method may also involve computing the I/Q impairments of the receiver at frequency f based on the sampled complex signal.
- the method may also involve repeating the actions of directing and computing for values of the frequency f spanning a specified frequency band.
- the method may also involve storing the I/Q impairments of the receiver for the values of the frequency f in a memory.
- a method for estimating I/Q impairments associated with a sampled complex signal produced by a receiver may involve the following actions.
- a device is directed to stimulate the receiver with a stimulus signal having an isolated tone at displacement frequency f and a void interval at displacement frequency ⁇ f (The displacement frequencies f and ⁇ f are displacements with respect to a local oscillator frequency of the receiver.
- the sampled complex signal may be a baseband signal produced by the receiver.
- a Discrete-Time Fourier transform value C I at frequency f is computed for an I component of the sampled complex signal.
- a Discrete-Time Fourier transform value C Q at frequency f is computed for a Q component of the sampled complex signal.
- a gain imbalance g of the sampled complex signal at frequency f is computed based on magnitudes of the values C I and C Q .
- the gain imbalance g includes at least a gain imbalance of the receiver.
- a phase skew ⁇ of the sampled complex signal at frequency f is computed based on phases of the values C I and C Q , where the phase skew ⁇ includes at least a phase skew of the receiver
- a method for estimating a DC scaling of a signal path between an I/Q modulator of a transmitter and an I/Q demodulator of a receiver may involve the following operations.
- the output of the transmitter may be coupled to the input of the receiver, e.g., via a cable.
- the transmitter is directed to supply a zero signal as input to the I/Q modulator.
- a first response signal that has been captured from the I/Q demodulator in response to said supplying the zero signal is received.
- the transmitter is directed to supply a constant signal equal to a non-zero complex constant as input to the I/Q modulator.
- a second response signal that has been captured from the I/Q demodulator in response to said supplying the constant signal is received.
- the first response signal is averaged to obtain a first average
- the second response signal is averaged to obtain a second average.
- a difference between the second average and the first average is computed.
- the DC scaling is computed based on the difference and the non-zero complex constant.
- a DC rotation of the signal path may be computed based on a phase of the difference and a phase of the non-zero complex constant.
- the DC scaling and DC rotation are usable to remove an effect of the signal path from measured I/Q impairments at the receiver in order to obtain estimates of the I/Q impairments of the transmitter.
- the transmitter has no (or negligible) local oscillator leakage. (Such might be the case, e.g., when the transmitter has an RF architecture other than a direct conversion architecture.)
- the DC scaling is then computed based on the second average and the non-zero complex constant.
- the DC rotation is computed based on a phase of the second average and the phase of the non-zero complex constant.
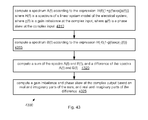
- a method for computing I/Q impairments at a complex output (i.e., an I/Q output pair) of an electrical system based on I/Q impairments at a complex input (i.e., an I/Q input pair) of the electrical system may include the following operations.
- a spectrum A(f) is computed according to the expression H ( f )(1+ g ( f )exp( j ⁇ ( f )), where H(f) is a spectrum of a linear system model of the electrical system, where g(f) is a gain imbalance at the complex input, where ⁇ (f) is a phase skew at the complex input.
- a spectrum B(f) is computed according to the expression H ( ⁇ f )(1 ⁇ g ( f )exp( ⁇ j ⁇ ( f )).
- a sum of the spectra A(f) and B(f) and a difference of the spectra A(f) and B(f) are computed.
- a gain imbalance and phase skew at the complex output are computed based on real and imaginary parts of the sum, and real and imaginary parts of the difference.
- the electrical system being modeled by the spectrum H(f) is the inverse of a signal path from an I/Q modulator of a transmitter to a demodulator of a receiver, e.g., as variously described herein.
- the gain imbalance and the phase skew at the complex input of the electrical system may represent a gain imbalance and a phase skew at the input (or alternatively, at the output) of the demodulator.
- the gain imbalance and the phase skew at the complex output of the electrical system may represent a gain imbalance and a phase skew at the output of the I/Q modulator.
- a receiver device may receive a transmission signal over a communication medium, and may perform I/Q demodulation on the received transmission signal to produce a pair of analog I (in-phase) and Q (quadrature) signals.
- the receiver device may perform analog-to-digital conversion of each of the analog I and Q signals to produce respective digital I and Q signals.
- the resulting digital I and Q signals may have I/Q impairments caused by the I/Q demodulation and/or the analog-to-digital conversion and/or other processing.
- the receiver device may be configured to perform wideband I/Q impairment correction on the digital I and Q signals to correct the I/Q impairments.
- the wideband I/Q impairment correction may compensate for frequency-dependent variations of gain imbalance and phase imbalance in the digital I and Q signals, e.g., may compensate for gain imbalances and phase imbalances in the digital I and Q signals at a plurality of frequency offsets across an instantaneous bandwidth of the receiver device.
- Performing the wideband I/Q impairment correction on the digital I and Q signals may comprise filtering one or more of the digital I signal or the digital Q signal to produce a resultant digital I signal and a resultant digital Q signal.
- the resultant digital I and Q signals represent corrected signals.
- the resultant digital I signal is identical to the digital I signal
- the resultant digital Q signal is generated by filtering one or more of the digital I signal and the digital Q signal to obtain one or more respective filtered signals and by adding the one or more filtered signals.
- the resultant digital Q signal is identical to the digital Q signal
- the resultant digital I signal is generated by filtering one or more of the digital I signal and the digital Q signal to obtain one or more respective filtered signals and by adding the one or more filtered signals.
- the resultant digital I signal is generated by filtering one or more of the digital I signal and the digital Q signal to obtain respectively one or more filtered signals and by adding the one or more filtered signals; and the resultant digital Q signal is generated by filtering one or more of the digital I signal and the digital Q signal to obtain respectively one or more additional filtered signals and by adding the one or more additional filtered signals.
- a calibration system may determine correction information by providing a plurality of known test signals to the receiver device and measuring I/Q impairments introduced by the receiver device in response to the known test signals.
- the receiver device may include a calibration tone generator to generate the known test signal.
- the wideband I/Q impairment correction may utilize the correction information to compensate for the frequency-dependent variations of gain imbalance and phase imbalance in the digital I and Q signals.
- the calibration system may operate in an offline calibration phase and an online operation phase.
- Performing the offline calibration phase may include providing a plurality of known test signals to the receiver device, measuring I/Q impairments introduced by the receiver device in response to the known test signals, and determining correction information based on the measured I/Q impairments.
- Performing the online operation phase may include receiving a transmission signal over a communication medium, performing I/Q demodulation on the received transmission signal to produce analog I and Q signals, performing analog-to-digital conversion of each of the analog I and Q signals to produce digital I and Q signals, and performing wideband I/Q impairment correction on the digital I and Q signals.
- the wideband I/Q impairment correction may use the correction information determined in the offline calibration phase to compensate for frequency-dependent variations of gain imbalance and phase imbalance in the digital I and Q signals.
- the offline calibration phase may be performed in response to the receiver device being powered on. In some embodiments the receiver device may automatically enter the online operation phase in response to determining that the offline calibration phase is complete. In some embodiments the receiver device may automatically switch from the online operation phase to the offline calibration phase in response to determining that the receiver device is not busy processing received transmission signals in the online operation phase. In some embodiments the offline calibration phase may be initiated in response to user input.
- a transmitter device may receive digital I (in-phase) and Q (quadrature) signals to be transmitted.
- the transmitter device may perform wideband I/Q impairment pre-correction on the digital I and Q signals.
- the action of performing the wideband I/Q impairment pre-correction may involve filtering one or more of the digital I and Q signals to produce a resultant digital I signal and a resultant digital Q signal to pre-compensate for frequency-dependent variations of gain imbalance and phase imbalance that will be subsequently introduced during synthesis of a transmission signal.
- the transmission signal may be synthesized using the resultant digital I signal and the resultant digital Q signal.
- the action of synthesizing the transmission signal may include performing digital-to-analog conversion of the resultant digital I signal and the resultant digital Q signal to produce an analog I signal and an analog Q signal, and performing I/Q modulation to produce the transmission signal using the analog I signal and the analog Q signal.
- the resultant digital I signal and the resultant digital Q signal may pre-compensate for frequency-dependent variations of gain imbalance and phase imbalance caused by one or more of the digital to analog conversion and the I/Q modulation.
- the resultant digital I signal is identical to the digital I signal, and the resultant digital Q signal is generated by filtering one or more of the digital I signal and the digital Q signal to obtain one or more respective filtered signals and by adding the one or more filtered signals.
- the resultant digital Q signal is identical to the digital Q signal, and the resultant digital I signal is generated by filtering one or more of the digital I signal and the digital Q signal to obtain one or more respective filtered signals and by adding the one or more filtered signals.
- the resultant digital I signal is generated by filtering one or more of the digital I signal and the digital Q signal to obtain respectively one or more filtered signals and by adding the one or more filtered signals; and the resultant digital Q signal is generated by filtering one or more of the digital I signal and the digital Q signal to obtain respectively one or more additional filtered signals and by adding the one or more additional filtered signals.
- a calibration system may determine correction information by providing a plurality of known digital test signals to the transmitter device and measuring I/Q impairments introduced by the transmitter device in response to the known test signals.
- the wideband I/Q impairment pre-correction may utilize the correction information to produce the resultant digital signals.
- the transmitter device may operate in an offline calibration phase and an online operation phase.
- the offline calibration phase may include providing a plurality of known test signals to the transmitter device, measuring I/Q impairments introduced by the transmitter device in response to the known test signals, and determining correction information based on the measured I/Q impairments.
- the offline calibration phase may be performed in response to the transmitter device being powered on. In some embodiments the transmitter device may automatically enter the online operation phase in response to determining that the offline calibration phase is complete. In some embodiments the transmitter device may automatically switch from the online operation phase to the offline calibration phase in response to determining that the transmitter device is not busy transmitting signals in the online operation phase. In some embodiments the offline calibration phase may be initiated in response to user input.
- the online operation phase may include receiving digital I and Q signals to be transmitted, and performing wideband I/Q impairment pre-correction on the digital I and Q signals.
- the action of performing the wideband I/Q impairment pre-correction may use the correction information determined in the offline calibration phase to filter one or more of the digital I and Q signals to produce a resultant digital I signal and a resultant digital Q signal to pre-compensate for frequency-dependent variations of gain imbalance and phase imbalance that will be subsequently introduced during synthesis of a transmission signal.
- the transmission signal may be synthesized using the resultant digital I signal and a resultant digital Q signal
- a measurement system may include a receiver device and a device under test.
- the receiver device may be configured to receive a transmission signal including measurement data acquired from the device under test, perform I/Q demodulation on the received transmission signal to produce analog I (in-phase) and Q (quadrature) signals, perform analog-to-digital conversion of each of the analog I and Q signals to produce digital I and Q signals, and perform wideband I/Q impairment correction on the digital I and Q signals.
- the wideband I/Q impairment correction may compensate for frequency-dependent variations of gain imbalance and phase imbalance in the digital I and Q signals.
- the measurement system may also include a transmitter device.
- the transmitter device may be configured to receive digital I and Q signals to be transmitted.
- the digital I and Q signals may specify information to be transmitted to the device under test.
- the transmitter device may be further configured to perform wideband I/Q impairment pre-correction on the digital I and Q signals.
- the action of performing the wideband I/Q impairment pre-correction may involve filtering one or more of the digital I and Q signals to produce a resultant digital I signal and a resultant digital Q signal to pre-compensate for frequency-dependent variations of gain imbalance and phase imbalance that will be subsequently introduced during synthesis of a transmission signal.
- the transmitter device may synthesize the transmission signal using the resultant digital I signal and a resultant digital Q signal, and transmit the transmission signal to the device under test.
- FIG. 1A illustrates one possible application of the compensation methods disclosed herein, where mobile device 10 and/or wireless transceiver station 15 apply digital pre-compensation to their transmitted signals and/or digital post-compensation to their received signals.
- FIG. 1B illustrates another possible application of the compensation methods disclosed herein, where a test instrument 20 applies digital pre-compensation to remove the effect of its I/Q impairments on the signals it transmits to a receiver under test 25 .
- FIG. 1C illustrates yet another possible application of the compensation methods disclosed herein, where a test instrument 35 applies digital post-compensation to remove the effect of its I/Q impairments on the signals it receives from a transmitter under test.
- FIG. 2A illustrates one embodiment of a method for operating a receiver so as to achieve at least partial I/Q impairment compensation.
- FIG. 2B illustrates one embodiment of a receiver configured to achieve at least partial I/Q impairment compensation.
- FIG. 3 illustrates one embodiment of a method for configuring a receiver to enable the receiver to at least partially compensate for I/Q impairments.
- FIG. 4 illustrates one embodiment of a method for operating a transmitter so as to achieve at least partial I/Q impairment compensation.
- FIG. 5 illustrates one embodiment of a transmitter configured to achieve at least partial I/Q impairment compensation.
- FIG. 6 illustrates one embodiment of a method for configuring a transmitter to enable the transmitter to at least partially compensate for I/Q impairments.
- FIG. 7 illustrates one embodiment of a system configured to provide I/Q impairment compensation.
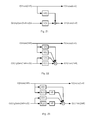
- the I/Q impairments are modeled as appearing entirely on the Q channel.
- FIG. 8 illustrates another embodiment of a system configured to provide I/Q impairment compensation.
- the I/Q impairments are modeled as appearing entirely on the I channel.
- FIG. 9 illustrates yet another embodiment of a system configured to provide I/Q impairment compensation.
- the I/Q impairments are modeled as appearing partially on both channels.
- FIG. 10 illustrates one embodiment of a method for operating a receiver so as to achieve at least partial compensation for I/Q impairments at frequency f.
- FIG. 11 illustrates one embodiment of a receiver that is configured to achieve at least partial compensation for I/Q impairments at frequency f.
- FIG. 12 illustrates one embodiment of a method for configuring a receiver to enable the receiver to achieve at least partial compensation for I/Q impairments at frequency f.
- FIG. 13 illustrates one embodiment of a method for operating a transmitter so as to achieve at least partial compensation for I/Q impairments at frequency f.
- FIG. 14 illustrates one embodiment of a transmitter that is configured to achieve at least partial compensation for I/Q impairments at frequency f.
- FIG. 15 illustrates a system being stimulated by a complex exponential tone and a distorted complex exponential tone appearing at the system output, where the distortions is characterized by a gain imbalance and phase skew.
- FIG. 16 illustrates a system where the gain imbalance and phase skew appear entirely on the Q channel.
- FIG. 17 illustrates one embodiment of a system for performing impairment compensation at a single frequency.
- FIG. 18 illustrates a 2 ⁇ 2 system model for performing I/Q impairment compensation.
- FIG. 19 illustrates an embodiment where an impairment model G precedes the compensation model H.
- FIG. 20A illustrates an embodiment where the impairment model G follows the compensation model H.
- FIG. 20B illustrates the response of the same series combination (of model H followed by model G) to a complex exponential tone at frequency f.
- FIG. 21 illustrates one embodiment for the compensation model H in terms of a pair of digital filters having frequency responses U(f) and V(f) respectively.
- FIG. 22 illustrates a refinement of FIG. 21 , where U and V are represented in terms of their even and odd parts.
- FIG. 23 illustrates an equivalent representation for the system of FIG. 22 , where the odd spectra B and D are replaced by corresponding even spectra followed by Hilbert Transforms.
- FIGS. 24A and 24B illustrate the responses of the system FIG. 23 to two respective inputs.
- FIG. 25 presents equations that are derived from FIGS. 24A and 24B respectively.
- FIGS. 26A and 26B illustrate phasor diagrams corresponding to the equations of FIG. 25 .
- FIG. 27 presents equations according to one embodiment that specify the compensation spectra A, E B , C and E D in terms of the I/Q impairment information.
- FIG. 28 illustrates a 2 ⁇ 2 model H that represents the I/Q impairments of a system.
- FIG. 29 illustrates one embodiment of the model H, in terms of frequency responses U and V.
- FIG. 30 illustrates a refinement of FIG. 29 , where U and V are represented in terms of their even and odd parts.
- FIG. 31 illustrates an equivalent representation for the system of FIG. 30 , where the odd spectra B and D are replaced by corresponding even spectra followed by Hilbert Transforms.
- FIGS. 32A and 32B illustrate the responses of the system FIG. 31 to two respective inputs.
- FIG. 33 presents equations that are derived from FIGS. 32A and 32B respectively.
- FIGS. 34A and 34B illustrate phasor diagrams corresponding to the equations of FIG. 33 .
- FIG. 35 presents a matrix equation derived from the phasor diagrams of FIGS. 34A and 34B .
- FIG. 36 presents the solution to the matrix equation of FIG. 35 .
- FIG. 37 illustrates one embodiment of a system for measuring properties of a signal path between the I/Q modulator 3710 and the I/Q demodulator 3735 .
- FIG. 38 illustrates a LO leakage vector A, an intentionally-injected DC vector B and their sum C.
- FIG. 39 illustrates the response vectors A′, B′ and C′ corresponding respectively to vectors A, B and C.
- FIG. 40 illustrates one embodiment of a method for computing a DC mapping value for the signal path.
- FIG. 41 illustrates a system with frequency response H(f) being stimulated by an input signal s input (f,t) having gain imbalance g(f) and phase skew ⁇ (f), and producing output signal s output (f,t) with gain imbalance g′(f) and phase skew ⁇ ′(f).
- FIG. 42 presents equations derived from FIG. 41 .
- FIG. 43 illustrates one embodiment of a method for transforming I/Q impairments through a linear system H(f).
- FIG. 44 illustrates one embodiment of a method for determining I/Q impairments of a transmitter.
- FIG. 45 illustrates one embodiment of a method for determining I/Q impairments of a transmitter, using intentionally-displaced local oscillators.
- FIG. 46 illustrates one embodiment of a method for determining the I/Q impairments of a receiver.
- FIG. 47 illustrates one embodiment of a method for estimating I/Q impairments associated with a complex signal.
- FIG. 48 illustrates one embodiment of a system for measuring transmitter and/or receiver I/Q impairments, where the system includes a transmitter and receiver whose local oscillator frequencies are intentionally offset.
- FIG. 49 illustrates the spectrum of the signal received by the receiver in response to the transmitter's transmission of a tone at 31 MHz.
- the transmitter's local oscillator frequency is 6 MHz higher than the receiver's local oscillator frequency.
- the tone appears at 37 MHz in the received spectrum.
- FIG. 50 illustrates the received spectrum after removal of the receiver's I/Q impairments.
- FIG. 51 illustrates the spectrum of FIG. 50 after having been frequency shifted.
- FIG. 52 illustrates the frequency-shifted spectrum without first removing the receiver's impairments.
- FIG. 53A illustrates a single-point vector calibration correction 5310 followed by a double-point vector corruption model 5320 .
- FIG. 53B shows a refinement of FIG. 53A , where the single-point vector calibration correction is determined by constants ⁇ and ⁇ , and where the double-point vector corruption is determined by constants A, E B , C and E D .
- FIG. 54 illustrates a phasor diagram corresponding to the right-hand part of FIG. 53B (i.e., to the right of the dotted line).
- FIG. 55A illustrates a receiver including a receiver filter 5525 and an I/Q demodulator 5530 .
- FIG. 55B illustrates a system including a transmitter and a receiver that are coupled together.
- the system may be used to determine the I/Q impairments of the transmitter and/or the receiver.
- FIG. 55C illustrates the relative magnitude of the tone at frequency f and the image at ⁇ f at three points along the path from the transmitter's I/Q modulator to the receiver's I/Q demodulator.
- FIG. 56A illustrates convergence rate as a function of magnitude estimation error.
- FIG. 56B illustrates convergence rate as a function of rotation (phase) estimation error.
- FIG. 57 introduces notation for the complex amplitude a of a tone and the complex amplitude ⁇ of an image carried by complex signal that has been distorted by gain imbalance g(f) and phase skew ⁇ (f).
- FIGS. 58A and 58B derive equations that characterize the tone and image in terms of the gain imbalance g(f) and phase skew ⁇ (f).
- FIG. 59 illustrates the gain imbalance g(f) and phase skew ⁇ (f) in terms of a distortion to the Q channel signal (“Q Actual”) relative to the I channel signal (“I Reference”).
- FIGS. 60 and 61 show the magnitude spectra for the in-phase and quadrature signal components, i.e., for the “I Reference” signal and “Q actual” signal of FIG. 59 .
- FIG. 62 illustrates a LabVIEW graphical program for computing local oscillator leakage, signal amplitude, gain imbalance, image rejection and phase skew, according to one embodiment.
- FIG. 63 illustrates shows a LabVIEW graphical program (VI) that receives data computed by a programmable hardware element (e.g., an FPGA of a receiver), and computes LO Leakage, amplitude gain imbalance and phase skew from that data.
- a programmable hardware element e.g., an FPGA of a receiver
- FIGS. 64 and 65 show plots of the amplitude spectrum of a rectangular window function with different acquisition lengths and with a common sample rate of 120 MHz.
- FIG. 66 illustrates a system model whose complex input signal has I/Q impairments g in ( ⁇ ) and ⁇ in ( ⁇ ) and whose complex output signal has I/Q impairments g out ( ⁇ ) and ⁇ out ( ⁇ ).
- FIG. 67 presents equations specifying the frequency response functions U( ⁇ ) and V( ⁇ ) of FIG. 66 in terms of the input I/Q impairments g in ( ⁇ ) and ⁇ in ( ⁇ ) and the output I/Q impairments g out ( ⁇ ) and ⁇ out ( ⁇ ).
- FIG. 68 illustrates one embodiment of a computer system 6800 that may be used to perform any of the method embodiments described herein.
- Memory Medium Any of various types of memory devices or storage devices.
- the term “memory medium” is intended to include an installation medium, e.g., a CD-ROM, floppy disks 105 , or tape device; a computer system memory or random access memory such as DRAM, DDR RAM, SRAM, EDO RAM, Rambus RAM, etc.; a non-volatile memory such as a Flash, magnetic media, e.g., a hard drive, or optical storage; registers, or other similar types of memory elements, etc.
- the memory medium may comprise other types of memory as well or combinations thereof.
- the memory medium may be located in a first computer in which the programs are executed, or may be located in a second different computer which connects to the first computer over a network, such as the Internet. In the latter instance, the second computer may provide program instructions to the first computer for execution.
- the term “memory medium” may include two or more memory mediums which may reside in different locations, e.g., in different computers that are connected over a network.
- Programmable Hardware Element includes various hardware devices comprising multiple programmable function blocks connected via a programmable interconnect. Examples include FPGAs (Field Programmable Gate Arrays), PLDs (Programmable Logic Devices), FPOAs (Field Programmable Object Arrays), and CPLDs (Complex PLDs).
- the programmable function blocks may range from fine grained (combinatorial logic or look up tables) to coarse grained (arithmetic logic units or processor cores).
- a programmable hardware element may also be referred to as “reconfigurable logic”.
- Computer System any of various types of computing or processing systems, including a personal computer system (PC), mainframe computer system, workstation, network appliance, Internet appliance, personal digital assistant (PDA), television system, grid computing system, or other device or combinations of devices.
- PC personal computer system
- mainframe computer system workstation
- network appliance Internet appliance
- PDA personal digital assistant
- television system grid computing system, or other device or combinations of devices.
- computer system can be broadly defined to encompass any device (or combination of devices) having at least one processor that executes instructions from a memory medium.
- LO Local Oscillator
- the periodic signal may be a pure sinusoid, and its frequency and/or amplitude may be programmable.
- the periodic signal may or may not be phase or frequency locked to another periodic signal.”
- Embodiments of the present invention may be realized in any of various forms.
- the present invention may be realized as a computer-implemented method, a computer-readable memory medium, or a computer system.
- the present invention may be realized using one or more custom-designed hardware devices such as ASICs.
- the present invention may be realized using one or more programmable hardware elements such as FPGAs.
- a computer-readable memory medium may be configured so that it stores program instructions and/or data, where the program instructions, if executed by a computer system, cause the computer system to perform a method, e.g., any of a method embodiments described herein, or, any combination of the method embodiments described herein, or, any subset of any of the method embodiments described herein, or, any combination of such subsets.
- a computer system may be configured to include a processor (or a set of processors) and a memory medium, where the memory medium stores program instructions, where the processor is configured to read and execute the program instructions from the memory medium, where the program instructions are executable to implement any of the various method embodiments described herein (or, any combination of the method embodiments described herein, or, any subset of any of the method embodiments described herein, or, any combination of such subsets).
- the computer system may be realized in any of various forms.
- the computer system may be a personal computer (in any of its various realizations), a workstation, a computer on a card, an application-specific computer in a box, a server computer, a client computer, a hand-held device, a tablet computer, a wearable computer, etc.
- a set of computers distributed across a network may be configured to partition the effort of executing a computational method (e.g., any of the method embodiments disclosed herein).
- a first computer may be configured to receive an O-QPSK modulated signal and to capture samples of that signal.
- the first computer may send the samples to a second computer through the network.
- the second computer may operate on the samples according to any of the method embodiments described herein, or, any combination of the method embodiments described herein, or, any subset of any of the method embodiments described herein, or, any combination of such subsets.
- FIG. 1A illustrates one possible application (among many) of the inventive ideas described herein.
- a mobile device 10 e.g., mobile phone
- the mobile device 10 may include the digital pre-correction described herein to improve the quality of its transmitted signals, i.e., to correct for so-called “I/Q impairments” in its transmission hardware (e.g., in its I/Q modulator).
- the wireless transceiver station 15 may apply digital post-correction to its received signal to correct for I/Q impairments in its reception hardware (e.g., in its I/Q demodulator).
- the wireless transceiver station and mobile device may apply the same pre-correction and post-correction with roles exchanged, i.e., for transmissions in the opposite direction.
- FIG. 1B illustrates another possible application of the inventive ideas described herein.
- a test transmitter 20 transmits signals to a receiver under test 25 .
- the test transmitter 20 may perform the digital pre-correction described herein correct for its own I/Q impairments, and thus, improve the quality of its transmissions.
- the test transmitter 20 may achieve a higher standard on image rejection due to use of the digital pre-correction.
- distortions e.g., I/Q impairments
- measured in the signals captured by the receiver may be ascribed to the receiver's imperfections.
- FIG. 1C illustrates yet another possible application of the inventive ideas described herein.
- a test receiver 35 receives signals transmitted by a transmitter under test 30 .
- the test receiver employs the digital post-correction described herein to correct for its own I/Q impairments.
- the receiver may meet a higher standard on image rejection than it would without the post-correction. Therefore, any distortions (e.g., I/Q impairments) measured in the signals captured by the receiver may be clearly assigned to the transmitter's imperfections.
- a method 100 for compensating for I/Q impairments of a receiver over a range of frequencies may involve the operations shown in FIG. 2A .
- the receiver may receive an analog input signal.
- the analog input signal may be received from a transmission medium.
- the transmission medium is a medium that permits the transmission of signal energy.
- the transmission medium may be free space, the atmosphere, the earth or some portion of the earth's surface, an electrical cable, a fiber optic cable, a body of water such as an ocean.
- the receiver may perform I/Q demodulation on the analog input signal to produce an analog inphase (I) signal and an analog quadrature (Q) signal.
- I/Q demodulation is well understood in the field of communication.
- I/Q demodulation involves mixing the analog input signal with a pair of orthogonal carriers.
- the analog I signal and the analog Q signals may be interpreted as baseband signals, i.e., as the components of a complex baseband signal. In other embodiments, the analog I signal and the analog Q signals may be interpreted as intermediate frequency (IF) signals.
- IF intermediate frequency
- the receiver may digitize the analog I signal and the analog Q signal to produce, respectively, a digital I signal and a digital Q signal.
- digital signal is meant to imply a sampled signal, not a two-state signal.
- the receiver may include a pair of analog-to-digital converters (ADCs).
- the digital I signal and the digital Q signal may be filtered in accordance with a 2 ⁇ 2 matrix of digital filters to produce a filtered digital I signal and a filtered digital Q signal.
- the 2 ⁇ 2 matrix of digital filters may compensate (or, at least partially compensate) for I/Q impairments of the receiver over a range of frequencies, e.g., a range of frequencies wide enough to cover the bandwidth of transmitted communication signal or an instantaneous bandwidth of the receiver.
- the digital filters make the receiver's input-output behavior more closely approximate a perfect receiver that has no I/Q impairments.
- a perfect receiver would produce signals I(n) and Q(n) that are equal in amplitude and 90 degrees apart in phase, i.e., no gain imbalance and no phase skew.
- the 2 ⁇ 2 matrix of digital filters may have the following properties.
- the frequency response of at least one of the diagonal components of the 2 ⁇ 2 matrix may be computed based on measurements of the I/Q impairments as a function of frequency and the measurements of the I/Q impairments as a function of the negative of frequency. For example, if one characterizes the I/Q impairments with a gain imbalance function g(f) and a phase skew function ⁇ (f), with f covering the range of frequencies, the frequency response of the component h 22 (or the component h 11 , or each of the components h 11 and h 22 ) may be computed based on the functions g(f), g( ⁇ f), ⁇ (f) and ⁇ ( ⁇ f).
- the frequency response of at least one of the non-diagonal components of the 2 ⁇ 2 matrix may be computed based on the measurements of the I/Q impairments as a function of frequency and the measurements of the I/Q impairments as a function of the negative of frequency.
- the filtering of the digital I signal and the digital Q signal is performed “in accordance with a 2 ⁇ 2 matrix of digital filters” is not meant to suggest that the receiver (or whatever device is used to implement the filtering) must include a filter circuit to implement a trivial multiplication by zero when the corresponding element of the 2 ⁇ 2 matrix is identically zero, or an adder to implement a trivial addition by zero.
- the receiver need not include a multiplier to perform that trivial convolution.
- filtering “in accordance with a 2 ⁇ 2 matrix of digital filters” does not necessarily require a full 2 ⁇ 2 array of convolution circuits in all cases.
- the filtered digital I signal and the filtered digital Q signal are usable to recover a stream of information bits.
- the receiver (or another processing agent such as a host computer) may recover the stream of information bits by performing symbol demodulation on the filtered digital I signal and the filtered digital Q signal.
- symbol demodulation the vector signal (I F (n),Q F (n)) may be decimated to determine a sequence of complex symbols, and each of the complex symbols may be mapped to the closest constellation point in a given constellation (set of points in the complex plane). The sequence of resulting complex points determines a stream of information bits.
- the receiver includes a digitizer, where the digitizer performs the above-described actions of digitizing and filtering.
- digitizer is meant to imply an instrument that is calibrated to a known standard. For example, the relationship between the analog input and the digital output is calibrated to a known standard for both the I channel and the Q channel.
- the receiver is a test instrument such as a vector signal analyzer (VSA).
- VSA vector signal analyzer
- the test instrument may receive the analog input signal from a transmitter, e.g., a transmitter under test.
- the analog input signal is received in response to the transmitter's action of transmitting a transmit signal onto the transmission medium.
- the test instrument may be configured to compensate for its own I/Q impairments, but to not compensate for the I/Q impairments of the transmitter. In the context of test and measurement, it is important to be able to accurately measure and report the impairments of a device under test rather than to compensate for the impairments of that device.
- the measurements of the receiver's I/Q impairments do not include I/Q impairments of the transmitter.
- the present patent disclosure describes methods for measuring receiver-only impairments.
- Test instruments are generally used to perform the testing of devices under test (DUTs) or systems under test (SUTs).
- Test instruments generally include one or more inputs and outputs for connecting to SUTs.
- the inputs and outputs may be analog, digital, radio frequency, etc., e.g., at various voltage levels and frequencies.
- Test instruments are generally able to perform one or more tests or features.
- test instruments may be configured to capture and analyze waveforms, calculate measured power, generate a tone at a programmed frequency, etc.
- Test instruments are also typically calibrated in order to achieve a specified level of accuracy on its I/O.
- test instruments usually include a user interface in order to specify how the test instrument should behave.
- the receiver may be expected to compensate for the transmitter's impairments and its own impairments.
- the 2 ⁇ 2 matrix of digital filters may be computed based on measurements of the I/Q impairments of the transmitter-and-receiver combination.
- the same principle regarding calculation of frequency responses based on the impairments as a function of f and the impairments as a function ⁇ f applies here.
- the filtering operation 125 may be performed on a programmable hardware element such as an FPGA, or in dedicated digital circuitry such as an application specific integrated circuit (ASIC).
- ASIC application specific integrated circuit
- the programmable hardware element or dedicated digital circuitry may be supplied with the same sample clock that drives the ADC conversion.
- the filtering operation 125 may be performed by a processor in response to the execution of program instructions.
- the processor may be incorporated as part of the receiver, or as part of another system such as a host computer or controller board.
- At least one of the diagonal components of the 2 ⁇ 2 matrix is computed based on the measurements of the I/Q impairments as a function of f and the measurements of the impairments as a function ⁇ f.
- the “at least one diagonal” is to be interpreted as “exactly one diagonal”
- the other diagonal component of the 2 ⁇ 2 matrix is a discrete-time unit impulse function (e.g., taking the value one at time zero, and zero elsewhere).
- At least one of the non-diagonal components of the 2 ⁇ 2 matrix is computed based on the measurements of the I/Q impairments as a function of f and the measurements of the I/Q impairments as a function ⁇ f.
- the “at least one non-diagonal” is to be interpreted as “exactly one non-diagonal”, and the other non-diagonal component of the 2 ⁇ 2 matrix is the zero function.
- the receiver's I/Q impairments over positive frequencies and the receiver's I/Q impairments over negative frequencies may be assumed to be functionally related.
- the computation of the 2 ⁇ 2 matrix of digital filters may be simplified as follows. The frequency response of one of the diagonal components of the 2 ⁇ 2 matrix at the arbitrary frequency f in the frequency range may be computed based only on a measurement of the I/Q impairments at the frequency f (or alternatively, only on a measurement of the I/Q impairments at the frequency ⁇ f).
- the frequency response H 22 (f) of the component h 22 may be computed based only on a measurement of g(f) and a measurement of ⁇ (f), where f ranges over the frequencies at which measurements have been obtained.
- the frequency response of one of the non-diagonal components of the 2 ⁇ 2 matrix at the frequency f may be computed based only on the measurement of the I/Q impairments at the frequency f (or alternatively, only on the measurement of the I/Q impairments at the frequency ⁇ f).
- the I/Q impairments at the frequency f and the I/Q impairments at frequency ⁇ f are constrained such that the I/Q impairments at f are determined by the I/Q impairments at ⁇ f, or such that the I/Q impairments at frequency ⁇ f are determined by the I/Q impairments at f.
- the gain imbalance at the frequency f and the gain imbalance at frequency ⁇ f may be constrained to be equal
- the phase skew at frequency f and the phase skew at frequency ⁇ f may be constrained to be equal (or negatives of each other).
- both non-diagonal components of the 2 ⁇ 2 matrix may be set to zero; one of the diagonal components may correspond to a pure pass-through filter (i.e., unity frequency response); and a frequency response of the other diagonal component at the arbitrary frequency f may be computed based only on a measurement of the I/Q impairments at the frequency f (or alternatively, only on a measurement of the I/Q impairments at the frequency ⁇ f).
- both diagonal components of the 2 ⁇ 2 matrix may correspond to pure pass-through filters; one of the non-diagonal components may be set to zero; and a frequency response of the other non-diagonal component at the arbitrary frequency f may be computed based only on a measurement of the I/Q impairments at the frequency f (or alternatively, only on a measurement of the I/Q impairments at the frequency ⁇ f).
- a receiver 200 may be configured as shown in FIG. 2B .
- Receiver 200 may include any subset of the features described above in connection with method 100 .
- Receiver 200 may include an I/Q demodulator 210 , a digitization unit 215 and a digital circuit 220 .
- the I/Q demodulator 210 may be configured to receive an analog input signal y(t) and perform I/Q demodulation on the analog input signal to produce an analog inphase (I) signal and an analog quadrature (Q) signal, denoted I(t) and Q(t).
- the I/Q demodulator may receive a pair of orthogonal carriers from a local oscillator circuit.
- the digitization unit 215 may be configured to digitize the analog I signal and the analog Q signal to produce, respectively, a digital I signal and a digital Q signal, which are denoted I(n) and Q(n).
- the digitization unit 215 may receive a conversion clock from a clock generation circuit.
- the digitization unit includes an I-channel ADC and a Q-channel ADC, each being driven by the same conversion clock.
- the digital circuit 220 may be configured to filter the digital I signal and the digital Q signal in accordance with a 2 ⁇ 2 matrix of digital filters (as described above) to produce a filtered digital I signal and a filtered digital Q signal.
- the 2 ⁇ 2 matrix of digital filters may be configured to compensate (or, at least partially compensate) for I/Q impairments of the receiver over a range of frequencies.
- the digital circuit when programmed with the 2 ⁇ 2 matrix of digital filters, makes the receiver 200 behave more like a mathematically perfect receiver, i.e., one having a perfect I/Q demodulator and perfect digitization unit.
- the digital circuit 220 is realized by (or, as part of) a programmable hardware element, or dedicated digital circuitry such as an ASIC.
- the digital circuit 220 is (or includes, or is realized by) a processor that is configured to execute program instructions.
- the processor is part of a computer system such as a host computer system or controller board.
- the receiver 200 may include a means for recovering a stream of information bits by performing symbol demodulation on the filtered digital I signal and the filtered digital Q signal.
- the recovering means may include any one or more of the following: a processor executing on the receiver, a processor executing on a host computer, a processor executing on a controller board (e.g., a controller board installed in an instrumentation chassis along with the receiver), a programmable hardware element, an ASIC.
- the receiver 200 is (or includes) a test instrument. See the above discussion of the notion of a test instrument.
- a method 300 for configuring a receiver may involve the operations shown in FIG. 3 .
- the method 300 may be used to configure the receiver to at least partially compensate for I/Q impairments of the receiver.
- the method 300 may be implemented by a computer system in response to the execution of program instructions. (The method 300 may include any subset of the features described above.)
- the computer system may receive measurements of the I/Q impairments of the receiver over a frequency band.
- the receiver may include an I/Q demodulator, a pair of analog-to-digital converters (ADCs) and a digital circuit, e.g., as described above.
- the I/Q demodulator may be configured to generate an analog I signal and an analog Q signal from an analog input signal.
- the ADCs may be configured to sample the analog I signal and the analog Q signal to respectively obtain a digital I signal and a digital Q signal.
- the digital circuit may be configured to filter the digital I signal and the digital Q signal to obtain a filtered digital I signal and a filtered digital Q signal. (See the above discussion for various ways of realizing the digital circuit.)
- the computer system may compute a 2 ⁇ 2 matrix of digital filters based on the measurements.
- the 2 ⁇ 2 matrix of digital filters may be computed to achieve at least partial compensation for the I/Q impairments of the receiver over the frequency band.
- a frequency response of at least one of the diagonal components of the 2 ⁇ 2 matrix may be computed based on the measurements as a function of frequency and the measurements as a function of the negative of frequency.
- a frequency response of at least one of the non-diagonal components of the 2 ⁇ 2 matrix may be computed based on the measurements as a function of frequency and the measurements as a function of the negative of frequency.
- the computer system may program the digital circuit to implement the 2 ⁇ 2 matrix of digital filters, where the digital circuit, when so programmed, is configured to at least partially compensate for the I/Q impairments of the receiver over the frequency band.
- the action of programming the digital circuit involves transferring the 2 ⁇ 2 matrix of digital filters (or parameters specifying those filters) to the digital circuit or to a memory used by the digital circuit.
- a method 400 for compensating for I/Q impairments of a transmitter may involve the operations shown in FIG. 4 .
- a digital inphase (I) signal and a digital quadrature (Q) signal may be received.
- the digital I signal and the digital Q signal may be interpreted as the components of a complex-valued signal I(n)+jQ(n).
- the digital I signal and the digital Q signal may carry one or more streams of information bits, e.g., as the result of symbol modulation according to a given constellation.
- the digital I signal and the digital Q signal may be interpreted as the components of a complex-valued baseband signal or intermediate frequency (IF) signal.
- the digital I signal and the digital Q signal may be filtered in accordance with a 2 ⁇ 2 matrix of digital filters to produce a filtered digital I signal and a filtered digital Q signal.
- the filtering operation may be performed by the transmitter or some other agent.
- the 2 ⁇ 2 matrix of digital filters may pre-compensate (or, at least partially pre-compensate) for the I/Q impairments of the transmitter over a range of frequencies, e.g., over a frequency range broad enough to cover the bandwidth of a communication signal to be transmitted.
- the 2 ⁇ 2 matrix of digital filters may have the following properties.
- the frequency response of at least one of the diagonal components of the 2 ⁇ 2 matrix may be computed based on measurements of the I/Q impairments as a function of frequency and the measurements of the I/Q impairments as a function of the negative of frequency.
- the I/Q impairments are characterized by a gain imbalance function g(f) and a phase skew function ⁇ (f), with f covering the range of frequencies
- the frequency response of the digital filter h 22 (or the digital filter h 11 , or each of the digital filters h 11 and h 22 ) may be computed based on g(f), g( ⁇ f), ⁇ (f) and ⁇ ( ⁇ f).
- a frequency response of at least one of the non-diagonal components of the 2 ⁇ 2 matrix may be computed based on the measurements of the I/Q impairments as a function of frequency and the measurements of the I/Q impairments as a function of the negative of frequency.
- the transmitter may convert the filtered digital I signal and the filtered digital Q signal to analog form in order to respectively obtain an analog I signal and an analog Q signal.
- the transmitter may perform I/Q modulation on the analog I and Q signals to produce a modulated analog signal.
- the modulated analog signal may be transmitted onto a transmission medium, e.g., a transmission medium as described above.
- a receiver may receive the modulated analog signal, likely in a noise-perturbed and channel-distorted form.
- the 2 ⁇ 2 matrix of digital filters as “pre-compensating” for I/Q impairments of the transmitter. That is because the I/Q impairments occur after the application of the digital filters, especially in the I/Q modulation stage.
- the 2 ⁇ 2 matrix may be interpreted as applying an inverse distortion that together with the following distortions will give an approximation to the identity map overall.
- the filtering operation 415 may be performed in a programmable hardware element (PHE) such as an FPGA, or in dedicated digital circuitry such as an application-specific integrated circuit (ASIC).
- PHE programmable hardware element
- ASIC application-specific integrated circuit
- the filtering operation 415 may be performed by a processor in response to the execution of program instructions, e.g., a processor of a host computer system or an instrumentation controller broad.
- the transmitter is a test instrument (e.g., an arbitrary waveform generator or a vector signal generator).
- the test instrument may transmit the modulated analog signal to a receiver, e.g., a receiver under test.
- a receiver e.g., a receiver under test.
- the above-described measurements of the transmitter's I/Q impairments preferably do not include I/Q impairments of the receiver.
- This patent disclosure describes methods for measuring transmitter-only impairments (cleanly separated from receiver impairments).
- the transmitter may be expected to correct for the receiver's impairment and its own impairments.
- the 2 ⁇ 2 matrix of digital filters may be computed based on measurements of the I/Q impairments of the transmitter-and-receiver combination. The same principle regarding calculation of frequency responses based on the impairments as a function off and the impairments as a function ⁇ f applies here.
- the transmitter's I/Q impairments over positive frequencies and the transmitter's I/Q impairments over negative frequencies may be assumed to be functionally related.
- the computation of the 2 ⁇ 2 matrix of digital filters may be simplified as follows.
- the frequency response of at least one of the diagonal components of the 2 ⁇ 2 matrix at the arbitrary frequency f in the frequency range may be computed based only on a measurement of the I/Q impairments at the frequency f (or alternatively, only on a measurement of the I/Q impairments at the frequency ⁇ f).
- the frequency response value H 22 (f) of the component h 22 may be computed based only on the a measurement of g(f) and a measurement of ⁇ (f), where f ranges over the frequencies at which measurements have been obtained.
- the frequency response of at least one of the non-diagonal components of the 2 ⁇ 2 matrix at the frequency f may be computed based only on the measurement of the I/Q impairments at the frequency f (or alternatively, only on the measurement of the I/Q impairments at the frequency ⁇ f).
- the I/Q impairments at the frequency f and the I/Q impairments at frequency ⁇ f are constrained such that the I/Q impairments at f are determined by the I/Q impairments at ⁇ f, or such that the I/Q impairments at frequency ⁇ f are determined by the I/Q impairments at f.
- the gain imbalance at the frequency f and the gain imbalance at frequency ⁇ f may be constrained to be equal
- the phase skew at frequency f and the phase skew at frequency ⁇ f may be constrained to be equal (or alternatively, negatives of each other).
- the gain imbalance is assumed to be even and the phase skew is assumed to be odd. Then both non-diagonal components of the 2 ⁇ 2 matrix may be set to zero; one of the diagonal components may correspond to a pure pass-through filter (i.e., unity frequency response); and a frequency response of the other diagonal component at the arbitrary frequency f may be computed based only on a measurement of the I/Q impairments at the frequency f (or alternatively, only on a measurement of the I/Q impairments at the frequency ⁇ f).
- both diagonal components of the 2 ⁇ 2 matrix may correspond to pure pass-through filters; one of the non-diagonal components may be set to zero; and a frequency response of the other non-diagonal component at the arbitrary frequency f may be computed based only on a measurement of the I/Q impairments at the frequency f (or alternatively, only on a measurement of the I/Q impairments at the frequency ⁇ f).
- a transmitter 500 may be configured as shown in FIG. 5 .
- Transmitter 500 may incorporate any subset of the features described above in connection with method 400 .
- Transmitter 500 may include a digital circuit 510 , a digital-to-analog conversion (DAC) unit 515 and an I/Q modulator 520 .
- DAC digital-to-analog conversion
- the digital circuit 510 may be configured to receive a digital inphase (I) signal and a digital quadrature (Q) signal, and filter the digital I signal and the digital Q signal with a 2 ⁇ 2 matrix of digital filters to produce a filtered digital I signal and a filtered digital Q signal. (The filtering may be performed as variously described above.)
- the digital I signal and the digital Q signal may carry one or more streams of information bits.
- the 2 ⁇ 2 matrix of digital filters may be computed to pre-compensate (or, at least partially pre-compensate) for I/Q impairments of the transmitter over a range of frequencies.
- a frequency response of at least one of the diagonal components of the 2 ⁇ 2 matrix may be computed based on measurements of the I/Q impairments as a function of frequency and the measurements of the I/Q impairments as a function of the negative of frequency.
- a frequency response of at least one of the non-diagonal components of the 2 ⁇ 2 matrix may be computed based on the measurements of the I/Q impairments as a function of frequency and the measurements of the I/Q impairments as a function of the negative of frequency.
- the digital circuit 510 is said to “pre-compensate” for the I/Q impairment of the transmitter because the I/Q impairments occur in transmitter stages after the digital circuit, especially in the I/Q modulator 520 .
- the digital circuit (by applying the 2 ⁇ 2 matrix of digital filters) introduces a pre-distortion to the complex signal I(n)+jQ(n) so that the net effect of the pre-distortion followed by the subsequent impairments will approximate an ideal transmitter having no I/Q impairments.
- the digital circuit applies an inverse distortion that in combination with the subject distortion approximates the identity map (i.e., frequency response function identically equal to unity).
- the DAC unit 515 may be configured to convert the filtered digital I and Q signals to analog form in order to obtain respective analog I and Q signals.
- the DAC unit 515 may receive a conversion clock from a clock generation unit.
- the digital circuit 510 may receive the same conversion clock so that it generates the complex samples (I F (n),Q F (n)) at the same rate that the DAC unit converts the samples into analog form (I(t),Q(t)).
- the I/Q modulator 520 may be configured to perform I/Q modulation on the analog I and Q signals to produce a modulated analog signal.
- the modulated analog signal may be transmitted to a receiver through a transmission medium.
- I/Q modulation is well understood in the field of communication.
- the I/Q modulation may be modeled by the expressions:
- the digital circuit 510 is realized by (or, as part of) a programmable hardware element, or dedicated digital circuitry such as an ASIC.
- the digital circuit 510 is (or includes, or is realized by) a processor that is configured to execute program instructions.
- the processor is part of a computer system such as a host computer system or controller board.
- the transmitter 500 may be a test instrument. See the above discussion of test instrument in the context of method 400 .
- a method 600 for configuring a transmitter may involve the operations shown in FIG. 6 .
- the method 600 may be used to configure the transmitter to at least partially compensate for I/Q impairments of (or introduced by) the transmitter.
- the method 600 may be performed by a computer system in response to the execution of program instructions.
- the computer system may receive measurements of the I/Q impairments of the transmitter over a frequency range.
- the transmitter may include a digital circuit, a pair of digital-to-analog converters (DACs) and an I/Q modulator.
- the digital circuit may be configured to filter a digital I signal and a digital Q signal to respectively obtain a filtered digital I signal and a filtered digital Q signal.
- the pair of DACs may be configured to convert the filtered digital I signal and the filtered digital Q signal to analog form in order to respectively obtain an analog I signal and an analog Q signal.
- the I/Q modulator may be configured to modulate a carrier signal with the analog I and Q signals to obtain a modulated carrier signal.
- the modulated carrier signal may be transmitted to a receiver through a transmission channel.
- the computer system may compute a 2 ⁇ 2 matrix of digital filters for the digital circuit based on the measurements.
- the 2 ⁇ 2 matrix of digital filters may be computed to achieve pre-compensation (or, at least partial pre-compensation) for the I/Q impairments of the transmitter over the frequency range.
- the frequency response of at least one of the diagonal components of the 2 ⁇ 2 matrix may be computed based on the measurements as a function of frequency and the measurements as a function of the negative of frequency.
- the frequency response of at least one of the non-diagonal components of the 2 ⁇ 2 matrix may be computed based on the measurements as a function of frequency and the measurements as a function of the negative of frequency.
- the computer system may program the digital circuit to implement the 2 ⁇ 2 matrix of digital filters, where the digital circuit, when so programmed, is configured to at least partially pre-compensate for the I/Q impairments over the frequency range.
- the action of programming the digital circuit involves transferring the digital filters (or parameters specifying the filters) to the digital circuit or to parameter memory used by the digital circuit.
- the digital circuit may be a programmable hardware element, an application specific integrated circuit (ASIC), a processor executing under the control of program instructions, or any combination thereof.
- ASIC application specific integrated circuit
- a 2 ⁇ 2 matrix of digital filters may be used to compensate for I/Q impairments at a receiver or a transmitter.
- both the transmitter and the receiver may employ the matrix compensation, each using its own 2 ⁇ 2 compensation matrix.
- the transmitter's compensation matrix may be computed based on the transmitter's I/Q impairments, while the receiver's compensation matrix may be computed based on the receiver's I/Q impairments.
- This section derives the frequency responses for the digital filters in the special case where the 2 ⁇ 2 matrix has the special form shown in FIG. 7 .
- gain imbalance g and phase skew ⁇ are relative measurements, we have the freedom to model the gain imbalance and phase skew as being due to distortions on only one channel (I or Q), the other channel being ideal.
- FIG. 7 represents the choice of modeling both the gain imbalance and the phase skew as being due to distortions on the Q channel only.
- the digital compensation may be performed using all four frequency responses H 11 , H 12 , H 21 and H 22 .
- FIG. 7 may be interpreted as the filtering operation performed by the receiver's digital circuit 220 or the filtering operation performed by the transmitter's digital circuit 510 .
- the following derivation applies both to the transmitter's compensation matrix and to the receiver's compensation matrix.
- Equations (a) and (b′) specify a matrix equation in vector unknown [U( ⁇ ),V( ⁇ )] T , whose solution is given by:
- a ⁇ ( ⁇ ) - 2 ⁇ ⁇ g ⁇ ( ⁇ ) ⁇ g ⁇ ( - ⁇ ) ⁇ sin ⁇ ⁇ ⁇ ⁇ ( ⁇ ) + ⁇ ⁇ ( - ⁇ ) ⁇ g 2 ⁇ ( ⁇ ) + g 2 ⁇ ( - ⁇ ) + 2 ⁇ ⁇ g ⁇ ( ⁇ ) ⁇ g ⁇ ( - ) ⁇ cos ⁇ ⁇ ⁇ ⁇ ( ⁇ ) + ⁇ ⁇ ( - ⁇ ) ⁇
- B ⁇ ( ⁇ ) j ⁇ ⁇ g 2 ⁇ ( ⁇ ) + g 2 ⁇ ( - ⁇ ) ⁇ g 2 ⁇ ( ⁇ ) + g 2 ⁇ ( - ⁇ ) + 2 ⁇ ⁇ ( - ⁇ ) + 2 ⁇ ⁇ ( - ⁇ ) + 2 ⁇ ⁇ ⁇ ( - ⁇ ) + 2
- the above expressions may be used to compute frequency responses U and V based on measured or estimated impairment functions g and ⁇ . These expressions apply equally to post-compensation at the receiver or pre-compensation at the transmitter. In other words, the frequency responses U( ⁇ ) and V( ⁇ ) for pre-correcting I/Q impairments g(f) and ⁇ (f) are the same as the frequency responses for post-correction those same I/Q impairments.
- the computed frequency responses U and V may be used to determine corresponding impulses responses u(n) and v(n) using any of various known filter design algorithms.
- E B ⁇ ( ⁇ ) ⁇ g 2 ⁇ ( - ⁇ ) - g 2 ⁇ ( ⁇ ) ⁇ ⁇ sgn ⁇ ( ⁇ ) g 2 ⁇ ( ⁇ ) + g 2 ⁇ ( - ⁇ ) + 2 ⁇ ⁇ g ⁇ ( ⁇ ) ⁇ g ⁇ ( - ⁇ ) ⁇ cos ⁇ ⁇ ⁇ ⁇ ( ⁇ ) + ⁇ ⁇ ( - ⁇ ) ⁇
- E D ⁇ ( ⁇ ) 2 ⁇ ⁇ sgn ⁇ ( ⁇ ) ⁇ ⁇ g ⁇ ( ⁇ ) ⁇ sin ⁇ ( ⁇ ⁇ ( ⁇ ) ) - g ⁇ ( - ⁇ ) ⁇ sin ⁇ ( ⁇ ⁇ ( - ⁇ ) ) ⁇ g 2 ⁇ ( ⁇ ) + g 2 ⁇ ( - ⁇ ) + 2 ⁇ ⁇ g
- a method 1000 for operating a receiver may involve the operations shown in FIG. 10 .
- the receiver may receive an analog input signal.
- the analog input signal may be received from a transmission medium, e.g., as described above.
- the receiver may perform I/Q demodulation on the analog input signal to produce an analog inphase (I) signal and an analog quadrature (Q) signal, e.g., as described above.
- I analog inphase
- Q analog quadrature
- the receiver may digitize the analog I signal and the analog Q signal to produce respectively a digital I signal and a digital Q signal.
- the transformation may be performed by applying the following matrix multiplication:
- the 2 ⁇ 2 matrix c may be configured to post-compensate (or, at least partially post-compensate) for measured I/Q impairments of the receiver at a particular frequency f.
- the matrix c may have the following properties. At least one of the diagonal elements c 11 and c 22 may be computed based on the measured I/Q impairments of the receiver at frequency f. For example, the coefficient c 22 may be computed as a function of the measured value g(f) and/or the measured value ⁇ (f), where g is the gain imbalance function and ⁇ is the phase skew function. Similarly, at least one of the non-diagonal elements c 12 and c 21 may be computed based on the measured I/Q impairments of the receiver at frequency f. For example, the coefficient c 21 may be computed as a function of the measured value g(f) and/or the measured value ⁇ (f). In some embodiments, each of the four matrix elements is similarly computed (i.e., based on the measured impairments at f).
- c ij (f) denote the functional expression that is used to determine the coefficient c ij from the I/Q impairments at frequency f. Due to the continuity of the functional expressions c ij (f) with respect frequency f, the matrix c(f) is a good approximation for the matrix c(f+ ⁇ f) as long as ⁇ f is sufficiently small. Thus, when the receiver uses the matrix c(f) to perform transform operation 1025 , the receiver will achieve at least partial compensation over a neighborhood of frequencies around f. The quality of the compensation will typically degrade as ⁇ f increases in absolute value.
- the analog input signal is a pure sinusoidal tone, e.g., a tone at frequency f or a tone at frequency f+f LO , where f LO is the frequency of the receiver's local oscillator.
- the analog input signal is a communication signal that carries a stream of binary information.
- the matrix c has the additional property that one of its diagonal elements is one. In some embodiments, the matrix c has the additional property that one of its non-diagonal elements is zero. In some embodiments, the matrix c has one of the following special forms:
- the transform operation 1025 is performed “in accordance with a 2 ⁇ 2 matrix”. That qualifying phrase is not meant to require that the receiver include a multiplier (or adder) to implement a trivial multiplication by one (or a trivial addition by zero).
- a receiver 1100 may be configured as shown in FIG. 11 . (The receiver 1100 may incorporate any subset of the features described above in connection with method 1000 .)
- the receiver 1100 may include an I/Q demodulator 1110 , a digitization unit 1115 and a digital circuit 1120 .
- the I/Q demodulator 1110 may be configured to receive an analog input signal, and perform I/Q demodulation on the analog input signal to produce an analog inphase (I) signal and an analog quadrature (Q) signal.
- the analog input signal may be received from a transmission medium as described above.
- the digitization unit 1115 may be configured to digitize the analog I signal and the analog Q signal to produce respectively a digital I signal and a digital Q signal.
- the digital circuit 1120 may be configured to transform the digital I signal and the digital Q signal in accordance with a 2 ⁇ 2 matrix of constants to produce a resultant digital I signal and a resultant digital Q signal.
- the 2 ⁇ 2 matrix may be configured to at least partially compensate for I/Q impairments of the receiver at a particular frequency f.
- a first of the constants, corresponding to a first diagonal element of the 2 ⁇ 2 matrix, may be computed based on measured I/Q impairments of the receiver at frequency f.
- a second of the constants, corresponding to a first non-diagonal element of the 2 ⁇ 2 matrix may be computed based on the measured I/Q impairments at frequency f.
- each of the four constants is similarly computed (i.e., based on the measured impairments at f).
- a method 1200 for configuring a receiver may involve the operations shown in FIG. 12 .
- the method 1200 may be used to configure the receiver to at least partially compensate for I/Q impairments of the receiver at a given frequency f.
- the method 1200 may be implemented by a computer system in response to the execution of program instructions. (The method 1200 may include any subset of the features described above in connection with FIGS. 10 and 11 .)
- the computer system may receive measured I/Q impairments of the receiver at frequency f.
- the receiver may include an I/Q demodulator, an analog-to-digital conversion (ADC) unit and a digital circuit, e.g., as described above in connection with FIGS. 10 and 11 .
- the I/Q demodulator may be configured to generate an analog I signal and an analog Q signal from an analog input signal.
- the ADC unit may be configured to sample the analog I signal and the analog Q signal to respectively obtain a digital I signal and a digital Q signal.
- the digital circuit may be configured to transform the digital I signal and the digital Q signal to obtain a resultant digital I signal and a resultant digital Q signal. (See the discussions above for various ways of realizing the digital circuit.)
- the computer system may compute a 2 ⁇ 2 matrix of constants based on the measured I/Q impairments at frequency f.
- the 2 ⁇ 2 matrix may be computed to achieve at least partial compensation for the measured I/Q impairments at frequency f.
- At least one of the diagonal components of the 2 ⁇ 2 matrix may be computed based on the measured I/Q impairments at frequency f.
- at least one of the non-diagonal components of the 2 ⁇ 2 matrix may be computed based on the measured I/Q impairments at frequency f.
- the computer system may program the digital circuit to implement the 2 ⁇ 2 matrix of constants, where the digital circuit, when so programmed, is configured to at least partially compensate for the measured I/Q impairments at frequency f.
- the action of programming the digital circuit involves transferring the 2 ⁇ 2 matrix (or information specifying the matrix) to the digital circuit or to a memory used by the digital circuit.
- a method 1300 for compensating for the I/Q impairments of a transmitter at a particular frequency f may involve the operations shown in FIG. 13 .
- a digital inphase (I) signal and a digital quadrature (Q) signal may be received.
- the digital I signal and the digital Q signal together may represent a complex exponential tone at the frequency f.
- the digital I signal and the digital Q signal may carry respective streams of binary information.
- the digital I and Q signals may be the components of a complex baseband signal or of a complex intermediate-frequency signal.
- the transformation may be performed by the transmitter or some other agent.
- the transformation may be described by the following matrix multiplication:
- I R (n) and Q R (n) represent the resultant digital I signal and the resultant digital Q signal respectively.
- the 2 ⁇ 2 matrix may be configured to pre-compensate (or, at least partially pre-compensate) for the I/Q impairments of the transmitter at the frequency f. See the above discussion regarding the nature of “pre-compensation”. In brief, the application of the transform introduces an inverse distortion that, in combination with the distortions of the following transmitter stages, makes the transmitter appear more ideal in its input-output behavior.) Note that the above discussion regarding the meaning of transforming “in accordance with a 2 ⁇ 2 matrix” applies here as well.
- the 2 ⁇ 2 matrix c may have the following properties. At least one of the diagonal elements c 11 and c 22 may be computed based on a measurement of the I/Q impairments at frequency f and a measurement of the I/Q impairments at frequency ⁇ f. For example, the diagonal element c 22 may be computed based on a measured value of each of g(f), g( ⁇ f), ⁇ (f) and ⁇ ( ⁇ f), where g is the gain imbalance function and ⁇ is the phase skew function.
- the diagonal element c 22 may be computed based on a measured value of each of g(f), g( ⁇ f), ⁇ (f) and ⁇ ( ⁇ f), where g is the gain imbalance function and ⁇ is the phase skew function.
- at least one of the non-diagonal elements c 12 and c 21 may be computed based on the measurement at frequency f and the measurement at frequency ⁇ f.
- each of the four coefficients may be computed based on the measurement at frequency f and the measurement at frequency ⁇ f See the section “Calculating True Single Point Vector Calibration Constants” for one possible embodiment of the matrix c.
- the measured impairments may be impairments measured at the output of the corruption (i.e. the I/Q modulator) and may be different than the impairments if they could be measured at the input.
- the method may include transforming the output impairments at +f and ⁇ f to input impairments at only +f and then computing the matrix constants according to simplified formulas using the input impairments at only +f.
- the quality of the compensation achieved by operation 1315 will be limited by the quality of the impairment measurements.
- the present patent disclosure describes methods for obtaining quality measurements of the transmitter's I/Q impairments at any given frequency, or, over a whole range of frequencies.
- c ij (f) denote the functional expression that is used to determine the coefficient c ij from the I/Q impairments at frequency f and the I/Q impairments at frequency ⁇ f Due to the continuity of the functional expressions c ij (f) with respect frequency f, the matrix c(f) is a good approximation for the matrix c(f+ ⁇ f) as long as ⁇ f is sufficiently small.
- the transmitter uses the matrix c(f) to perform transform operation 1315 , the transmitter will achieve at least partial compensation over a neighborhood of frequencies around f. The quality of the compensation will typically degrade as ⁇ f increases in absolute value.
- the transmitter may convert the resultant digital I and Q signals to analog form in order to obtain respective analog I and Q signals.
- the transmitter may perform I/Q modulation on the analog I and Q signals to produce a modulated analog signal, e.g., as described above.
- the matrix c has one of the following special forms:
- the constants c 21 and c 22 may be computed based on the values A(f), E B (f), C(f) and E D (f) as described in the section “Calculating True Single Point Vector Calibration Constants”, especially at equations (1.81) and (1.82).
- the transformation 1315 may be performed on a programmable hardware element such as an FPGA, or in dedicated digital circuitry such as an application specific integrated circuit (ASIC).
- ASIC application specific integrated circuit
- the programmable hardware element or dedicated digital circuitry may be supplied with the same sample clock that drives the ADC conversion.
- the transformation 1315 may be performed by a processor in response to the execution of program instructions.
- the processor may be incorporated as part of the transmitter, or as part of another system such as a host computer or controller board.
- a transmitter 1400 may be configured as shown FIG. 14 .
- Transmitter 1400 may include any subset of the features described above in connection with method 1300 .
- Transmitter 1400 may include a digital circuit 1410 , a DAC unit 1415 and an I/Q modulator 1420 .
- the digital circuit 1410 may be configured to receive a digital inphase (I) signal and a digital quadrature (Q) signal, and transform the digital I signal and the digital Q signal in accordance with a 2 ⁇ 2 matrix of constants to produce a resultant digital I signal and a resultant digital Q signal.
- the digital circuit 1410 may be realized in any of various forms, e.g., as variously described above in connection with method 1300 .
- the DAC unit 1415 may be configured to convert the resultant digital I signal and the resultant digital Q signal to analog form in order to respectively obtain an analog I signal and an analog Q signal.
- the I/Q modulator 1420 may be configured to perform I/Q modulation on the analog I and Q signals to produce a modulated analog signal.
- the 2 ⁇ 2 matrix is configured to at least partially pre-compensate for I/Q impairments of the transmitter at frequency f.
- a first of the constants, corresponding a first diagonal element of the 2 ⁇ 2 matrix may be computed based on a measurement of the I/Q impairments at frequency f and a measurement of the I/Q impairments at frequency ⁇ f.
- a second of the constants, corresponding to a first non-diagonal element of the 2 ⁇ 2 matrix may be computed based on the measurement at frequency f and the measurement at frequency ⁇ f.
- the complex exponential tone at frequency ⁇ is often referred to simply as “the tone”, while the complex exponential tone at frequency ⁇ is often referred to as “the image”.
- a TONE ( ⁇ ) ⁇ 1 and A IMAGE ( ⁇ ) ⁇ 0 as g( ⁇ ) ⁇ 1 and ⁇ ( ⁇ ) ⁇ 0. It is desirable to have g( ⁇ ) as close to one as possible and ⁇ ( ⁇ ) as close to zero as possible.
- Linear scale is being assumed here for the gain imbalance. Gain imbalance may also be expressed in a logarithmic scale, e.g., in units of dB, in which case 0 dB represents the case of no gain imbalance.
- the notion of post-compensation involves coupling a compensation block to the output of a system that exhibits I/Q impairments.
- the compensation block is configured so that the series combination of the system followed by the compensation block behaves (or, approximates the behavior of) an ideal model having unity gain imbalance and zero phase skew.
- the system When the system is stimulated by a complex exponential tone at frequency ⁇ , it will generate a distorted complex signal that can be modeled as cos( ⁇ t )+ jg ( ⁇ )sin( ⁇ t + ⁇ ( ⁇ )), where g( ⁇ ) and ⁇ ( ⁇ ) are the I/Q impairments of the system at frequency ⁇ .
- the compensation block operates on the distorted complex signal to generate a corrected output signal equal to the original complex exponential tone at frequency ⁇ .
- the compensation block is said to “compensate” or “post-compensate” for the I/Q impairments of the system at frequency ⁇ .
- Wideband post-compensation of I/Q impairments means post-compensating for I/Q impairments at each frequency ⁇ in a frequency range or frequency band.
- pre-compensation involves placing a compensation block before the system, i.e., the output of the compensation block couples to the input of the system.
- the compensation block is configured so that the series combination of the compensation block followed by the system behaves (or, approximates the behavior of) an ideal model having unity gain imbalance and zero phase skew.
- the compensation block will produce a pre-distorted complex signal.
- the system receives the pre-distorted complex signal and further distorts that signal (by introducing I/Q impairments), thereby producing a complex output signal.
- the compensation block generates the pre-distorted complex signal so that the complex output signal from the system is equal to the original complex exponential tone at frequency ⁇ .
- the compensation block is said to “compensate” or “pre-compensate” for the I/Q impairments of the system at frequency ⁇ .
- Wideband pre-compensation of I/Q impairments means pre-compensating for I/Q impairments at each frequency ⁇ in a frequency range or frequency band.
- the real constants ⁇ and ⁇ will achieve partial compensation for I/Q impairments at frequencies in a neighborhood of ⁇ 0 , with the quality of compensation degrading with increasing distance from ⁇ 0 .
- the appropriate pair of values ( ⁇ , ⁇ ) for compensating I/Q impairments at frequency ⁇ 0 is typically different from the appropriate pair of values for compensating I/Q impairments at frequency ⁇ 0 .
- FIG. 18 depicts a basic model of a system H that will be used repeatedly throughout this patent disclosure, e.g., to represent the equalization filtering performed by the receiver and the equalization filtering performed by the transmitter. (Equalization is used here as a synonym for I/Q impairment compensation.)
- the complex input signal I(t)+jQ(t) represents a distorted signal supplied by a preceding system G, as illustrated in FIG. 19 .
- the gain imbalance g(f) and the phase skew ⁇ (f) are the I/Q impairments of the system G at frequency f.
- System G may represent the baseband equivalent of the receiver's front end, i.e., the portions of the receiver from its RF input to the output of the I/Q digitization unit.
- system G may represent the path from the input of the transmitter's I/Q DAC unit to the output the receiver I/Q digitization unit.
- the set B given by ⁇ exp( j 2 ⁇ ft ): f in given frequency range ⁇ forms a basis for the space of functions ⁇ x(t) ⁇ that are band limited to the given frequency range. Because the series combination of G followed by H is an identity map on each function of the basis set B, by linearity it will be an identity map on all band-limited functions x(t).
- the equalization system H may be realized by the receiver's digital circuit 220 as variously described above.
- system H represents the transmitter's equalization filtering
- the pre-compensated signal that gets distorted by the following system G.
- the series combination of H followed by G is an identity map on each function of the basis set X, it will be an identity map on all band-limited functions x(t).
- the series combination will produce that same complex exponential tone at its final output, as shown in FIG. 20B .
- the system G may represent the baseband equivalent of the transmitter's RF front end, i.e., the portions of the transmitter from the input of the transmitter's DAC unit to the RF output.
- the system G may represent the path from the input of the transmitter's DAC unit to the output of the receiver's digitization unit.
- the system H may be realized by the digital circuit 510 as variously described above.
- I/Q impairments may include an imbalance of the gain when comparing the in-phase (I) channel with the quadrature-phase (Q) channel, and a skew in the phase that occurs due to imperfect quadrature mixing.
- the phase skew perturbs the ideal 90-degree phase relationship between the I and Q channels).
- phase skew is typically modeled as an imperfection in the quadrature mixing, it can also be modeled as the phase skew between the I(t) and Q(t) signals.
- the input to the distortion model G is a complex exponential signal. Since I/Q impairments are relative, we may assume that the I/Q impairments appear entirely at the Q(t) output while the I(t) output is ideal. While other assumptions could be made, this assumption will simplify the following mathematical derivations.
- I ′( t ) I ( t )
- Q ′( t ) u ( t )* I ( t )+ v ( t )* Q ( t ), where u(t) and v(t) are the impulse responses corresponding to U(f) and V(f) respectively.
- any real-valued filter must necessarily have a symmetric magnitude response and an anti-symmetric phase response.
- x(t) being real implies
- Phase ⁇ X ( ⁇ f ) ⁇ ⁇ Phase ⁇ X ( f ) ⁇ for all f, where X(f) is the Fourier transform of x(t).
- V(f) cannot apply independent impairment corrections at frequencies f and ⁇ f.
- g(f) and g( ⁇ f) are different, and ⁇ (f) and ⁇ ( ⁇ t ) are different.
- the filter V acting by itself i.e., with U identically equal to zero
- the filter V would suffice.
- the second filter U(f) is introduced.
- any real-valued filter must necessarily have a symmetric magnitude response, we can reduce complexity by solving only for the positive-frequency portion of each spectrum A, B, C and D.
- we can reduce complexity by solving only for the positive-frequency portion of each spectrum A, B, C and D.
- we can account for such inputs by expressing them as equivalent positive-frequency inputs, relying on the odd symmetry of the sine function and the even symmetry of the cosine function:
- a filter If a filter is constrained to have symmetric impulse response, then the filter will exhibit a symmetric magnitude response and a zero phase response. Such is the case for filters a(t) and c(t). If, however, a filter's impulse response is anti-symmetric, then it will exhibit a symmetric magnitude response but a phase response that equals ⁇ ( ⁇ /2)sgn( f ).
- an anti-symmetric impulse response is equivalent to an even impulse response followed by a Hilbert transform.
- filter b(t) can be expressed as an even impulse response e B (t) followed by a Hilbert transform (HT), as shown in FIG. 23 .
- filter d(t) can be expressed as an even impulse response e D (t) followed by a Hilbert transform (HT).
- E B (f) and E D (f) are the frequency responses corresponding to e B (t) and e D (t), respectively.
- FIG. 24A shows the outputs of the four filters A, B, C and D in response to signal I 1 (t)+jQ 1 (t).
- FIG. 24B shows the outputs of the four filter in response to the signal I 2 (t)+jQ 2 (t).
- FIGS. 24A and 24B can be directly translated into a corresponding linear equation in A(f), E B (f), C(f) and E D (f) for positive f (or non-negative f).
- g 1 ( f ) g ( f ) for f> 0
- g 2 ( f ) g ( ⁇ f ) for f> 0
- ⁇ 1 ( f ) ⁇ ( f ) for f> 0
- ⁇ 2 ( f ) ⁇ ( ⁇ f ) for f> 0.
- FIGS. 24A and 24B give rise, respectively, to equations (1.1) and (1.2), which are shown in FIG. 25 .
- FIGS. 26A and 26B present the corresponding phasor diagrams. (Recall that cos(2 ⁇ ft) maps to 1, and sin(2 ⁇ ft) maps to ⁇ j in the phasor diagram.)
- This system of equations is a 4 ⁇ 4 linear system in unknown vector (A,E B ,C,E D ):
- equations (1.20) through (1.23) specialize to:
- a ⁇ ( f ) - sin ⁇ ( ⁇ 1 ⁇ ( f ) + ⁇ 2 ⁇ ( f ) ) 1 + cos ⁇ ( ⁇ 1 ⁇ ( f ) + ⁇ 2 ⁇ ( f ) ) ( 1.28 )
- E B ⁇ ( f ) 0 ( 1.29 )
- C ⁇ ( f ) cos ⁇ ( ⁇ 1 ⁇ ( f ) ) + cos ⁇ ( ⁇ 2 ⁇ ( f ) ) g ⁇ ( f ) ⁇ ⁇ 1 + cos ⁇ ( ⁇ 1 ⁇ ( f ) + ⁇ 2 ⁇ ( f ) ) ⁇ ( 1.30 )
- E D ⁇ ( f ) sin ⁇ ( ⁇ 1 ⁇ ( f ) ) - sin ⁇ ( ⁇ 2 ⁇ ( f ) ) g ⁇ ( f ) ⁇ ⁇ 1 + cos ⁇ ( ⁇ 1
- equations (1.20) through (1.23) specialize to:
- E B ⁇ ( f ) 0 ( 1.41 )
- C ⁇ ( f ) cos ⁇ ( ⁇ 1 ⁇ ( f ) ) + cos ⁇ ( ⁇ 2 ⁇ ( f ) ) 1 + cos ⁇ ( ⁇ 1 ⁇ ( f ) + ⁇ 2 ⁇ ( f ) ) ( 1.42 )
- E D ⁇ ( f ) sin ⁇ ( ⁇ 1 ⁇ ( f ) ) - sin ⁇ ( ⁇ 2 ⁇ ( f ) ) 1 +
- E B ⁇ ( f ) 0 ( 1.45 )
- E D ⁇ ( f ) 0. ( 1.47 )
- symmetric linear-phase FIR filters â(n) and ⁇ (n) are designed based respectively on the magnitude responses
- antisymmetric linear-phase FIR filters ⁇ circumflex over (b) ⁇ (n) and ⁇ circumflex over (d) ⁇ (n) are designed based respectively on the magnitude responses
- the Remez algorithm may be used to design these filters.
- symmetric linear-phase FIR filters â(n), ê B (n), ⁇ (n) and ê D (n) are designed based respectively on the magnitude responses
- the Remez algorithm may be used to design these filters.
- the equalization system of FIG. 23 may then be realized using the filters â(n), ê B (n), ⁇ (n) and ê D (n).
- filters û(n) and ⁇ circumflex over (v) ⁇ (n) may be designed based on the frequency responses U(f) and V(f).
- An L p -norm design method may be used to design these filters based on the magnitude and phase responses of U(f) and the magnitude and phase responses of V(f).
- the equalization system of FIG. 21 may then be implemented using the filters û(n) and ⁇ circumflex over (v) ⁇ (n).
- FIG. 15 illustrates a system that introduces I/Q impairments, i.e., gain imbalance g(f) and phase skew ⁇ (f), into a received complex exponential signal exp(j2 ⁇ ft).
- a 2 ⁇ 2 frequency response matrix H characterizing the system may be derived from the impairment functions g(f) and ⁇ (f).
- the gain imbalance g(f) and phase skew ⁇ (f) of the system as appearing entirely on the Q channel output, as shown in FIG. 28 .
- This model makes it convenient to use the special form of the matrix shown in FIG. 29 , where U(f) and V(f) are frequency responses corresponding to real filters u(t) and v(t).
- U(f) may be represented as the sum of its even part A(f) and odd part B(f), as shown in FIG. 30 .
- V(f) may be represented as the sum of its even part C(f) and odd part D(f).
- the filter with odd spectrum B(f) may be represented by a subsystem with even spectrum E B (f) followed by a Hilbert Transform HT, as shown in FIG. 31 .
- the filter with odd spectrum D(f) may be represented by a subsystem with even spectrum E D (f) followed by a Hilbert Transform HT. Note that the magnitude responses of B and E B are identical,
- FIG. 33 shows the two equations. Equation (1.48) is based on FIG. 32A . Equation (1.49) is based on FIG. 32B .
- g 1 ( f )sin( ⁇ 1 ( f )) A ( f ) ⁇ E D ( f ) (1.50)
- g 1 ( f )cos( ⁇ 1 ( f )) E B ( f )+ C ( f ) (1.51)
- g 2 ( f )sin( ⁇ 2 ( f )) A ( f )+ E D ( f ) (1.52)
- g 2 ( f )cos( ⁇ 2 ( f )) C ( f ) ⁇ E B ( f )
- a ( f ) (1 ⁇ 2) ⁇ g 1 ( f )sin( ⁇ 1 ( f ))+ g 2 ( f )sin( ⁇ 2 ( f )) ⁇ (1.56)
- E B ( f ) (1 ⁇ 2) ⁇ g 1 ( f )cos( ⁇ 1 ( f )) ⁇ g 2 ( f )cos( ⁇ 2 ( f )) ⁇ (1.57)
- C ( f ) (1 ⁇ 2) ⁇ g 1 ( f )cos( ⁇ 1 ( f ))+ g 2 ( f )cos( ⁇ 2 ( f )) ⁇ (1.58)
- E D ( f ) (1 ⁇ 2) ⁇ g 1 ( f )sin( ⁇ 1 ( f ))+ g 2 ( f )sin( ⁇ 2 ( f )) ⁇ . (1.59)
- a transmitter pre-distorts digital I/Q signals in order to compensate for its own I/Q impairments as variously described above. To accomplish this compensation, one must have an estimate of the transmitter's I/Q impairments. The quality of the compensation will be limited by the quality of the estimate (the extent to which it matches the truth). While a high-quality estimate is desirable, it is difficult to measure the transmitter's I/Q impairments directly. Rather, the measurements are obtained indirectly, e.g., using a receiver as shown in FIG. 37 .
- FIG. 37 shows a transmitter 3700 that couples to a receiver 3725 via a channel (e.g., a cable 3720 or a wireless channel).
- the transmitter may include a digital compensation unit 3702 , a DAC unit 3705 , an I/Q modulator 3710 and a front end 3715 .
- the compensation unit 3702 may perform pre-compensation (pre-distortion) on the digital signal I(n)+jQ(n) to obtain a pre-compensated signal I′(n)+jQ′(n), e.g., as variously described above.
- the analog signal s(t) may be upconverted to RF using the I/Q modulator 3710 .
- the upconverted signal may be conditioned by the TX front end 3715 to obtain a transmit signal.
- the transmit signal may be delivered to the receiver by the cable 3720 .
- the receiver 3725 may include a front end 3730 , an I/Q demodulator 3735 and a digitization unit 3740 .
- the front end 3830 may receive the transmitted signal from the cable 3720 and operate on the received signal to produce a conditioned signal.
- the conditioned signal may be down-converted by the I/Q demodulator to produce a complex down-converted signal.
- the complex down-converted signal may be sampled by the digitization unit 3740 to obtain a sampled complex signal.
- the sampled complex signal may be used to make I/Q impairment measurements.
- the receiver is a spectrum analyzer, e.g., a vector signal analyzer.
- H(f) is a complex number.
- the amplitude m(f) is referred to herein as the “scaling” of the signal path at frequency f.
- the phase ⁇ (f) is referred to herein as the “rotation” of the signal path at frequency f.
- Part of the solution includes obtaining an initial estimate for the signal path response function H(f). This section will focus on obtaining that initial estimate in the form of H(0), i.e., the frequency response of the signal path at DC (zero frequency).
- H(0) The amplitude m(0) of H(0) is referred to as the “DC scaling” of the signal path.
- the phase ⁇ (0) of H(0) is referred to as the “DC rotation” of the signal path.
- a spectrum analyzer is a device configured to measure the magnitude of an input signal versus frequency within the frequency range of the instrument.
- the spectrum analyzer measures the I/Q impairments of its demodulated signal, and then compensation is applied at the transmitter based on that measurement. The measurement may only crudely approximate the transmitter's I/Q impairments, but it may be good enough to achieve at least partial compensation.
- the spectrum analyzer then makes a second measurement of the I/Q impairments of its demodulated signal. This second measurement may be used to make an adjustment to the compensation being applied at the transmitter, and so on.
- the sequence of measurements may converge, i.e., the measured gain imbalance may converge to one and the measured phase skew may converge to zero, indicating that appropriate compensation has been achieved at the transmitter. Because the spectrum analyzer does not capture phase information, multiple iterations may be required to achieve convergence.
- the transmitter's I/Q impairments may be determined using a measurement device (such as a vector signal analyzer) that can make phase measurements and can lock the phase of the measurements to the transmitter.
- a measurement device such as a vector signal analyzer
- the transmitter's I/Q impairments may be determined with two measurements or less at the measurement device.
- the method described below makes two measurements, but requires that the transmitter's I/Q modulator and the receiver's I/Q demodulator be locked together in frequency (via phase locked loops with common reference). Unlike other methods, this method is resistant to synchronous spurs (i.e., spurs such as the LO leakage that are phase locked to the LO of the transmitter). While this technique can be used at any frequency, the main application is to determine the DC scaling m(0) and the DC rotation ⁇ (0) of the signal path in order to calibrate out the transmitter's LO leakage impairment.
- vector is used here as a synonym for “complex number”.
- the amplitude and phase of vector A represent the amplitude and phase of the LO leakage.
- This LO leakage signal moves from the transmitter's I/Q modulator to the receiver's I/Q demodulator, it gets scaled by m(0) and rotated by ⁇ (0) so that vector A is transformed into vector A′ at the receiver. See FIG. 39 .
- the vector A′ is measured, e.g., by averaging the sampled complex signal captured from the output of the I/Q demodulator.
- vector C′ is measured, e.g., by averaging the sampled complex signal captured from the output of the I/Q demodulator during the stimulation by vector B. Since both A′ and C′ are known by measurement, vector B′ can be calculated by subtraction.
- the LO leakage vector A may be computed by multiplying vector A′ by the inverse map.
- the signal K may be a tone.
- the sampled complex signals are windowed. If a window is not applied, there are restrictions on the frequency of the tone K. In addition to tone K, if there are other signal tones present, they could also potentially leak into the measurement. Thus, if not using a window, the tones (intentional or not) are preferably restricted to certain frequencies to avoid leakage.
- the compensation unit 3702 may apply this translation in addition to the I/Q impairment pre-compensation described above.
- the complex signal (I(n),Q(n)) may be subjected to the 2 ⁇ 2 matrix of digital filters to pre-compensate for I/Q impairments, and then translated to pre-compensate for the LO leakage.
- the calculation of the DC mapping may include the following extra calculation.
- the iterative method may diverge if the estimation error of the phase rotation is too large. In the case that the phase skew is large, this extra step may be used to get a more accurate estimate and enable the iterative method to converge: (1) Calculate the mapping from RX to TX as is already described. (2) Make a measurement of the phase skew. (3) Calculate using the method “Altering the gain imbalance and phase skew through a linear system” using the mapping from #1. (4) Add the rotation measurement of #1 to the computed phase skew of #3 to attain a more accurate rotation estimate.
- a method 4000 may involve the actions shown in FIG. 40 .
- the method 4000 may be used to estimate a DC scaling m(0) of a signal path between an I/Q modulator of a transmitter and a demodulator of a receiver.
- the method 4000 may incorporate any subset of the features described above in the section “Calculating the Mapping Between the Rx and Tx”.
- the method 4000 is described below as being performed by a “processing agent”.
- the processing agent may be any system of digital circuitry, e.g., a processor (executing under the control of program instructions), a programmable hardware element, an ASIC, or any combination thereof.
- the receiver conforms to a direct-conversion architecture
- the demodulator is an analog I/Q demodulator.
- the receiver may conform to a different architecture (e.g., a superheterodyne architecture) which performs analog down-conversion followed by digital I/Q demodulation.
- the demodulator is realized by digital circuitry, e.g., on a programmable hardware element, in dedicated digital circuitry, in software on a processor, or any combination thereof.
- the processing agent may direct the transmitter to supply a zero signal as input to the I/Q modulator.
- the zero signal is a constant zero signal.
- the zero signal may be a digital zero signal that is supplied to the complex input of the transmitter's DAC unit (e.g., DAC unit 3705 of FIG. 37 ).
- the processing agent may receive a first response signal that has been captured from the demodulator in response to the action of supplying the zero signal.
- the first response signal may be captured from the output of the receiver's ADC unit. (See, e.g., digitization unit 215 of FIG. 2B .)
- the constant signal may be supplied to the complex input of the transmitter's DAC unit.
- the processing agent may receive a second response signal that has been captured from the demodulator in response to the action of supplying the constant signal.
- the second response signal may be captured from the output of the receiver's ADC unit.
- the processing agent may average the first response signal to obtain a first average and averaging the second response signal to obtain a second average.
- the averaging helps to reduce noise in the measurements.
- the processing agent may compute the DC scaling based on the difference and the non-zero complex constant, e.g., as described above.
- the processing agent may store the DC scaling in a memory.
- the DC scaling and DC rotation are used to remove an effect of the signal path from measured I/Q impairments at the receiver in order to obtain estimates of the I/Q impairments of the transmitter.
- the signal path includes a cable coupling between the transmitter and the receiver. In other embodiments, the signal path includes a wireless channel between the transmitter and the receiver.
- the processing agent may alternatively compute a difference signal by subtracting the first response signal from the second response signal, and then average the difference signal.
- the DC scaling may then be computed based on average value and the non-zero complex constant.
- a computer system for estimating a DC scaling m(0) of a signal path between an I/Q modulator of a transmitter and a demodulator of a receiver, the computer system comprising a processor and memory.
- the memory storing program instructions, where the program instructions, when executed by the processor, cause the processor to: direct the transmitter to supply a zero signal as input to the I/Q modulator; receive a first response signal that has been captured from the demodulator in response to said supplying the zero signal; direct the transmitter to supply a constant signal equal to a non-zero complex constant as input to the I/Q modulator; receive a second response signal that has been captured from the demodulator in response to said supplying the constant signal; average the first response signal to obtain a first average and averaging the second response signal to obtain a second average; compute a difference between the second average and the first average; compute the DC scaling based on the difference and the non-zero complex constant.
- the program instructions may incorporate any subset of the features described above in the section “Cal
- the method of this section may be used to remove the effects of the signal path between the transmitter's I/Q modulator and the receiver's I/Q demodulator from the receiver's I/Q impairment measurements.
- Those effects may include the effects of the transmitter's front end, the transmission channel and the receiver's front end.
- the transmitter's front end may include an RF filter that contributes to the frequency response of the signal path.
- the receiver's front end may include an RF filter that contributes to the frequency response of the signal path.
- the magnitude response m(f) of the signal path may be calibrated out, while the phase rotation ⁇ (f) is not calibrated out.
- calibration may be achieved by performing pre-compensation at the transmitter using digital circuit 510 and/or post-compensation at the receiver using digital circuit 220 .
- the calculations of this section allow for the correct measurement of the transmitter's I/Q impairments without first calibrating out the phase response of the signal path.
- the total frequency response (including both magnitude and phase rotation) of the signal is calibrated out.
- A(f) and B(f) are respectively the right-hand sides of equation (1.63) and (1.64):
- a ( f ) H ( f ) ⁇ 1+ g ( f )exp( j ⁇ ( f )) ⁇ (1.65)
- B ( f ) H ( ⁇ f ) ⁇ 1 ⁇ g ( f )exp( ⁇ j ⁇ ( f )) ⁇ . (1.66)
- the method below describes how to iteratively measure the TX impairments when the magnitude and phase of the signal path transfer function H(f) are only approximately known.
- Part of that iterative measurement method involves using the equations derived in this section to compute the I/Q impairments at the output of the transmitter's I/Q modulator based on the I/Q impairments at the input (or alternatively, at the output) of the receiver's I/Q demodulator.
- the frequency response H(f) is set equal to the inverse of an estimate of the frequency response of the signal path. Different estimates of the signal path frequency response may be used in different circumstances.
- a method 4300 may involve the operations shown in FIG. 43 .
- the method 4300 may be used to compute I/Q impairments at a complex output z OUT of an electrical system based on I/Q impairments at a complex input z IN of the electrical system.
- a complex input is an input that includes an inphase channel and a quadrature channel.
- a complex output is an output that includes an inphase channel and a quadrature channel.
- Method 4300 may be performed by a processing agent as described above.
- the processing agent may compute a spectrum A(f) according to the expression H ( f ) ⁇ 1+ g ( f )exp( j ⁇ ( f ) ⁇ , where H(f) is a spectrum of a linear system model of the electrical system, where g(f) is a gain imbalance at the complex input z IN , where ⁇ (f) is a phase skew at the complex input z IN .
- the processing agent may compute a spectrum B(f) according to the expression H ( ⁇ f ) ⁇ 1 ⁇ g ( f )exp( ⁇ j ⁇ ( f )) ⁇ .
- the processing agent may compute a gain imbalance and phase skew at the complex output z OUT based on real and imaginary parts of the sum, and real and imaginary parts of the difference.
- the functions g I (f), g Q (f), ⁇ I (f) and ⁇ Q (f) may be computed based on the sum spectrum and the difference spectrum, and then the gain imbalance and phase skew at the complex output z OUT may be computed based on g I (f), g Q (f), ⁇ I (f) and ⁇ Q (f) as shown in FIG. 41 .
- the output gain imbalance and output phase skew constitute useful information in part because they may be used to perform I/Q impairment compensation or calibration as variously described herein.
- the processing agent may store the output gain imbalance and the output phase skew in a memory.
- the electrical system being modeled by the spectrum H(f) is the inverse of a signal path from an I/Q modulator of a transmitter to a demodulator of a receiver, e.g., as variously described herein.
- the gain imbalance and the phase skew at the complex input z IN of the electrical system may represent a gain imbalance and a phase skew at the input (or alternatively, at the output) of the demodulator.
- the gain imbalance and the phase skew at the complex output z OUT of the electrical system may represent a gain imbalance and a phase skew at the output of the I/Q modulator.
- the receiver conforms to a direct-conversion architecture
- the demodulator is an analog I/Q demodulator.
- the receiver may conform to a different architecture (e.g., a superheterodyne architecture) which performs analog down-conversion followed by digital I/Q demodulation.
- the demodulator is realized by digital circuitry, e.g., on a programmable hardware element, in dedicated digital circuitry, in software on a processor, or any combination thereof.
- the processing agent may also include computing an inverse of a spectrum of the signal path to determine the spectrum H(f), e.g., as variously described herein.
- the processing agent may compute the DC scaling and the DC rotation by: supplying a zero signal as input to the I/Q modulator, capturing a first response signal from the I/Q demodulator in response to said supplying the zero signal; supplying a constant signal equal to a non-zero complex constant as input to the I/Q modulator; capturing a second response signal from the I/Q demodulator in response to said supplying the constant signal; averaging the first response signal to obtain a first average and averaging the second response signal to obtain a second average; computing a difference between the second average and the first average; and computing the DC scaling based on the difference and the non-zero complex constant.
- the processing agent may also measure (e.g., direct the measurement of) the gain imbalance g(f) and the phase skew ⁇ (f) of an electronic device at a plurality of frequencies.
- the electronic device may be a transmitter, a receiver, or the series combination of a transmitter and receiver, as variously described herein.
- the processing agent may be a programmable hardware element. In other embodiments, the processing agent may be a processor that is configured to perform the method 4300 in response to execution of program instructions.
- a method 4400 for determining I/Q impairments of a transmitter may involve the actions shown in FIG. 44 .
- the method 4400 may include any subset of the features described in the section “Iterative Technique for Measuring Tx Impairments, in the section “Iterative Estimation of Transmitter Impairments Using Shared LOs”, and in the section “Iterative Estimation of Transmitter Impairment Using Shared LO—Optimized”.
- the method 4400 may be enacted by a processing agent, e.g., a processing agent as variously described above.
- the processing agent may perform a set of operations.
- the set of operations may include the operations 4415 through 4440 , as shown in FIG. 44 .
- the processing agent may direct that a complex exponential tone at frequency f be supplied to the transmitter.
- the processing agent may issue commands causing the complex exponential tone to be supplied (or generated by) the transmitter.
- the frequency f may be interpreted as a displacement frequency relative to the transmitter's local oscillator frequency.
- the frequency f may be non-zero.
- the processing agent may supply a pre-compensation transformation to a pre-compensation circuit of the transmitter.
- the pre-compensation circuit may be configured to apply the pre-compensation transformation to the complex exponential tone to obtain an adjusted complex signal.
- the pre-compensation circuit may be the digital circuit 510 of FIG. 5 or the compensation unit 3702 of FIG. 37 .
- the pre-compensation transformation may be configured to pre-compensate for a current estimate of the I/Q impairments of the transmitter.
- the transmitter may be configured to transmit a transmit signal based on the adjusted complex signal, e.g., as variously described above.
- the receiver may be configured to receive the transmit signal and capture a sampled complex signal representing the received transmit signal, e.g., as variously described above.
- a sampled complex signal representing the received transmit signal, e.g., as variously described above.
- the action of “sampling” a complex signal involves sampling its I component and sampling its Q component.
- a “sampled complex signal” includes a sampled I signal and a sampled Q signal.
- the processing agent may compute raw I/Q impairments based on the sampled complex signal.
- the raw I/Q impairments may include a gain imbalance and phase skew of the sampled complex signal. See the section “Precise Measurement Technique” for information on how to compute the raw I/Q impairments.
- the processing agent may transform the raw I/Q impairments to determine transformed I/Q impairments.
- the transform may remove measured I/Q impairments of the receiver from the raw I/Q impairments. See the section “Removing Receiver Impairments from Measured Output Impairments” for more information on how perform this transform.
- the processing agent may apply a 2 ⁇ 2 matrix of digital filters to the sampled complex signal to remove the effect of the receiver's measured I/Q impairments, e.g., as described above in connection with FIGS. 2A , 2 B and 3 , and in the sections “Wideband I/Q Impairment Equalization” and “Filter Design”.
- the application of the 2 ⁇ 2 matrix of digital filters to the sampled complex signal produces a filtered complex signal.
- the filtered complex signal may be used to compute the transformed I/Q impairments.
- the method described in the section “Precise Measurement Technique” may be used to determine the transformed I/Q impairments based on the filtered complex signal.
- the processing agent may remove a current estimate of a signal path from the transformed I/Q impairments to obtain path-compensated I/Q impairments, where the signal path includes a path from an I/Q modulator of the transmitter to a demodulator of the receiver.
- the signal path estimate may be removed by using the method described in the section “Altering the Gain Imbalance and Phase Skew Through a Linear System”.
- the path-compensated I/Q impairments may represent an estimate for residual I/Q impairments of the transmitter, i.e., “residual” in the sense that they are remaining impairments after the partial correction realized by the pre-compensation transformation of 4420 .
- the receiver may conform to a direct-conversion architecture, and the demodulator may be an analog I/Q demodulator, in which case the sampled complex signal may be captured by digitizing the complex analog output of the analog I/Q demodulator.
- the receiver may conform to a different kind of architecture, e.g., a superheterodyne architecture.
- the receiver may generate a real analog signal (e.g., a real intermediate-frequency signal) that represents the received transmit signal.
- the real analog signal may be digitized to obtain a sampled real signal.
- the sampled complex signal may then be generated computationally, e.g., by digitally mixing the sampled real signal with an orthogonal pair of digital sinusoids to obtain respectively the I and Q components of the sampled complex signal.
- the processing agent may update the current estimate of the I/Q impairments of the transmitter based on the path-compensated I/Q impairments, e.g., by combining the path-compensated I/Q impairments with the respective impairments of the current estimate.
- the method 4400 may include repeating the set of operations to determine a converged estimate (stable estimate) of the I/Q impairments of the transmitter at the frequency f. (This converged estimate comprises a measurement of the transmitter's I/Q impairments at the frequency f.)
- the set of operations may be repeated until a quality measure based on the path-compensated I/Q impairments is larger than a threshold.
- the converged estimate may be used to at least partially compensate for the I/Q impairments of the transmitter at frequency f, e.g., as variously described herein.
- the above-described action of repeating the set of operations may itself be performed a plurality of times to determine the converged estimate at a plurality of different values for the frequency f.
- the above-described action of repeating the set of operations to determine the converged estimate at frequency f may be referred to herein as a “transmitter I/Q impairment measurement at frequency f”.
- a plurality of transmitter I/Q impairment measurements may be made so as to cover the plurality of frequency values.
- the plurality of frequency values are symmetric about zero.
- the transmitter I/Q impairment measurements may be made so that the frequency values are visited in manner that alternates in sign and is non-decreasing in absolute value, e.g., as variously described herein.
- a local oscillator of the transmitter and a local oscillator of the receiver are phase locked to the same frequency reference (infers frequency lock).
- the current estimate of the signal path is based on a DC scaling and a DC rotation of the signal path, at least for a first of the transmitter I/Q impairment measurements.
- the DC scaling and the DC rotation may be determined by: supplying a zero vector signal to the transmitter; supplying a non-zero DC vector signal to the transmitter; and computing the DC scaling and the DC rotation based on a first DC vector response and a second DC vector response, where the first DC vector response is measured at the receiver in response to the zero vector signal, where the second DC vector response is measured at the receiver in response to the non-zero DC vector signal.
- the pre-compensation transformation has the form of a 2 ⁇ 2 matrix, where at least a first diagonal element of the matrix is computed from the current estimate of the I/Q impairments of the transmitter at frequencies f and ⁇ f, and where at least a first non-diagonal element of the matrix is computed from the current estimate of the I/Q impairments of the transmitter at frequencies f and ⁇ f.
- the current estimate of the signal path includes a measured amplitude of the sampled complex signal at frequency f.
- the amplitude may be measured as described in the section “Precise Measurement Technique”.
- the current estimate of the signal path also includes a measured rotation of the sampled complex signal at frequency f.
- a method 4500 for determining I/Q impairments of a transmitter may involve the actions shown in FIG. 45 .
- the method 4500 may include any subset of the features described in the section “Iterative Techniques for Measuring Tx Impairments.)
- the method 4500 may be performed by a processing agent, e.g., a processing agent as variously described above.
- the processing agent may configure a local oscillator (LO) of the transmitter and a local oscillator (LO) of the receiver to be phase locked to a common reference and so that a frequency of the receiver's LO minus a frequency of the transmitter's LO frequency is equal to a non-zero amount ⁇ LO.
- the amount ⁇ LO may be positive or negative.
- the processing agent may perform a set of operations S O .
- the set S O may include operations 4525 through 4550 , as shown in FIG. 45 .
- the processing agent may direct that a complex exponential tone at frequency f be supplied to the transmitter.
- the frequency f may be interpreted as a displacement relative to the transmitter's LO frequency.
- the complex exponential tone may be supplied in digital form, e.g., as variously described above.
- the transmitter may couple to (or include) a programmable hardware element configured to generate the complex exponential tone.
- the PHE may receive the sample clock used by the transmitter's DAC unit.
- the processing agent may supply a pre-compensation transformation to a pre-compensation circuit of the transmitter.
- the pre-compensation circuit may be configured to apply the pre-compensation transformation to the complex exponential tone in order to obtain an adjusted complex signal.
- the pre-compensation circuit may be the digital circuit 510 of FIG. 5 or the compensation unit 3702 of FIG. 37 .
- the pre-compensation transformation may be configured to pre-compensate for a current estimate of the I/Q impairments of the transmitter.
- the transmitter may be configured to transmit a transmit signal based on (derived from) the adjusted complex signal, e.g., as variously described above.
- a receiver may be configured to receive the transmit signal and to capture a sampled complex signal representing the received transmit signal, e.g., as variously described above.
- the transmitter may transmit the transmit signal onto a transmission channel (e.g., a cable), and the receiver may receive the transmit signal from the channel.
- a transmission channel e.g., a cable
- the processing agent may frequency shift the sampled complex signal by the amount ⁇ LO to obtain a frequency-shifted signal, e.g., by multiplying the sampled complex signal by a discrete-time complex exponential signal running at frequency ⁇ LO.
- the processing agent may compute raw I/Q impairments at frequency f based on the frequency-shifted signal.
- the raw I/Q impairments may include a gain imbalance g R (f) and a phase skew ⁇ R (f). (The process of computing the I/Q impairments from a complex signal is described above.)
- the processing agent may remove a current estimate of a signal path from the raw I/Q impairments at frequency f to obtain path-compensated I/Q impairments at frequency f (e.g., as described above in the section “Transforming I/Q Impairments through a Linear System”, or in the section “Altering the Gain Imbalance and Phase Skew through a Linear System”).
- the signal path may include a path from an I/Q modulator of the transmitter to a demodulator of the receiver.
- the path-compensated I/Q impairments at frequency f may represent an estimate for residual I/Q impairments of the transmitter at frequency f.
- the receiver may conform to a direct-conversion architecture, and the demodulator may be an analog I/Q demodulator, in which case the sampled complex signal may be captured by digitizing the complex analog output of the analog I/Q demodulator.
- the receiver may conform to a different kind of architecture, e.g., a superheterodyne architecture.
- the receiver may generate a real analog signal (e.g., a real intermediate-frequency signal) that represents the received transmit signal.
- the real analog signal may be digitized to obtain a sampled real signal.
- the sampled complex signal may then be generated computationally, e.g., by digitally mixing the sampled real signal with an orthogonal pair of digital sinusoids to obtain respectively the I and Q components of the sampled complex signal.
- the processing agent may update the current estimate of the I/Q impairments of the transmitter at frequency f based on the path-compensated I/Q impairments at frequency f.
- the method 4500 may include repeating the set of operations S O to determine a converged estimate (or stable estimate) of the I/Q impairments of the transmitter at frequency f.
- This converged estimate may be interpreted as a measurement of the transmitter's I/Q impairments at frequency f.
- the set of operations may be repeated until a quality measure based on the path-compensated I/Q impairments is larger than a threshold.
- the quality measure may be the negative of image rejection at frequency f.
- the converged estimate is usable to at least partially compensate for the I/Q impairments of the transmitter at frequency f.
- the above-described action of frequency shifting may be performed using a frequency-shift signal that is phase continuous between successive repetitions of the set of operations.
- the method 4500 may also include performing said repeating (of the set of operations S O ) a plurality of times to determine the converged estimate at a plurality of different values for the frequency f, e.g., values covering a desired transmission (or communication) band.
- the set of operations S O may also include removing measured I/Q impairments of the receiver at frequency f ⁇ LO from the sampled complex signal prior to the frequency shifting operation.
- the matrix M may have the special form
- m 21 and m 22 may be determined from a receiver's gain imbalance g RX (f ⁇ LO) and receiver's phase skew ⁇ RX (f ⁇ LO) at frequency f ⁇ LO based on the expressions:
- m 21 - tan ⁇ ⁇ ⁇ RX ⁇ ( f - ⁇ ⁇ ⁇ LO ) ⁇ .
- ⁇ m 22 1 g RX ⁇ ( f - ⁇ ⁇ ⁇ LO ) ⁇ cos ⁇ ⁇ ⁇ RX ⁇ ( f - ⁇ ⁇ ⁇ LO ) ⁇ .
- the constants m 21 and m 22 may be determined based on the receiver's measured I/Q impairments at frequency f ⁇ LO and its negative ⁇ (f ⁇ LO), as described in the section “Calculating True Single Point Vector Calibration Constants”, and especially at equations (1.81) and (1.82).
- the receiver's I/Q impairments may be measured as part of method 4500 , i.e., measured based on the sampled complex signal prior to frequency shifting.
- the set of operations S O may include measuring the I/Q impairments of the receiver at frequency f ⁇ LO based on the sampled complex signal.
- One technique for performing this measurement involves: (a) computing a Discrete-Time Fourier transform value C I at frequency f ⁇ LO of an I component of the sampled complex signal; (b) computing a Discrete-Time Fourier transform value C Q at frequency f ⁇ LO of a Q component of the sampled complex signal; (c) computing the receiver gain imbalance at frequency f ⁇ LO based on the magnitudes of the values C I and C Q ; and (d) computing the receiver phase skew at frequency f ⁇ LO based on the phases of the values C I and C Q .
- the method 4500 may also include applying a time-domain window to the sampled complex signal prior to computing the values C I and C Q .
- the time-domain window may be a rectangular (uniform) window or any of a variety of standard non-uniform windows. For more information on use of the rectangle window, see the section “Rectangle Window Optimization”.
- the above-described measurement of the receiver's I/Q impairments and the estimation of the transmitter's I/Q impairments may be performed at least partially in parallel.
- a programmable hardware element or perhaps a multicore processor
- the set of operations may include measuring the receiver's I/Q impairments at frequency f ⁇ LO as described above, computing the 2 ⁇ 2 matrix of correction constants based on the measured I/Q impairments as described above, and then applying the 2 ⁇ 2 matrix to the sampled complex signal prior to the frequency shift operation.
- the frequency shift operation is applied to the modified complex signal (I′(n),Q′(n)) resulting from the application of the 2 ⁇ 2 matrix.
- a 2 ⁇ 2 matrix of digital filters may be designed based on the receiver's I/Q impairments, as described above in connection with FIGS. 2A , 2 B and 3 , and in the sections “Wideband I/Q Impairment Equalization” and “Filter Design”.
- the set of operations may include the operation of applying the 2 ⁇ 2 matrix of digital filters to the sampled complex signal prior to the frequency shifting operation. The resulting filtered complex signal may then be subjected to the frequency shifting.
- the pre-compensation transformation has the form of a 2 ⁇ 2 matrix
- the matrix has the property that at least one of the diagonal elements of the matrix is computed based on the current estimate of the I/Q impairments of the transmitter at frequency f and a current estimate of the I/Q impairments of the transmitter at frequency ⁇ f, and the property that at least one of the non-diagonal elements of the matrix is computed based on the current estimate of the I/Q impairments of the transmitter at frequency f and the current estimate of the I/Q impairments of the transmitter at frequency ⁇ f.
- each of the four matrix elements is computed in this fashion.
- the processing agent may remove a current estimate of a signal path from the raw I/Q impairments at frequency f to obtain path-compensated I/Q impairments at frequency f.
- the current estimate of the signal path may include a measured amplitude of the frequency-shifted signal at frequency f.
- the current estimate of the signal path may also include a measured rotation of the frequency-shifted signal at frequency f.
- the current estimate of the signal path may be based on a DC scaling and a DC rotation of the signal path. Such an estimate may be used in at least a first performance of said set of operations.
- the method 4500 may also include determining the DC scaling and the DC rotation by: supplying a zero vector signal to the transmitter; supplying a non-zero DC vector signal to the transmitter; computing the DC scaling and the DC rotation based on a first DC vector response and a second DC vector response, where the first DC vector response is measured at the receiver in response to the zero vector signal, where the second DC vector response is measured at the receiver in response to the non-zero DC vector signal.
- determining the DC scaling and the DC rotation by: supplying a zero vector signal to the transmitter; supplying a non-zero DC vector signal to the transmitter; computing the DC scaling and the DC rotation based on a first DC vector response and a second DC vector response, where the first DC vector response is measured at the receiver in response to the zero vector signal, where the second DC vector response is measured at the receiver in response to the non-zero DC vector signal.
- a method 4600 for determining I/Q impairments of a receiver may include the operations shown in FIG. 46 .
- the method 4600 may be performed by a processing agent as described above.
- the processing agent may direct that an input signal be supplied to the receiver.
- the processing agent may issue commands to cause the input signal to be supplied to (or generated by) the receiver.
- the input signal may include an isolated tone at displacement frequency f and a void interval (i.e., an interval containing only noise) around displacement frequency ⁇ f (To say that a tone is “isolated” at a given frequency means that the tone is the only energy source except for noise in a frequency neighborhood of the given frequency (e.g., in an interval of frequencies centered on the given frequency). If the noise energy is too large, the measurement quality will degrade.
- the tone is preferably the only significant source of energy in the frequency neighborhood.
- the receiver may be configured to demodulate the input signal in order to obtain a sampled complex signal, e.g., as variously described above.
- the displacement frequencies f and ⁇ f may be displacements relative to a local oscillator frequency of the receiver.
- the processing agent may compute the I/Q impairments of the receiver at frequency f based on the sampled complex signal.
- the processing agent may repeat the actions of directing ( 4610 ) and computing ( 4615 ) for values of the frequency f spanning a specified frequency band, e.g., the currently-selected input band of the receiver or a standardized communication band.
- the processing agent may store the receiver's I/Q impairments for each of the values of the frequency f in a memory.
- the input signal is supplied by a transmitter whose local oscillator frequency is offset by a non-zero value from the local oscillator frequency of the receiver, e.g., as variously described above.
- the input signal is supplied by a calibration tone synthesizer.
- a calibration tone synthesizer is a system configured to create quality tones for the purpose of calibrating other systems.
- the term “quality tone” implies stability over amplitude, frequency, temperature, or time.
- the receiver includes a calibration tone synthesizer to facilitate self calibration.
- the action of computing the I/Q impairments of the receiver at frequency f includes: computing a Discrete-Time Fourier transform value C I at frequency f of an I component of the sampled complex signal; computing a Discrete-Time Fourier transform value C Q at frequency f of a Q component of the sampled complex signal; computing a gain imbalance of the receiver at frequency f based on magnitudes of the values C I and C Q ; and computing a phase skew of the receiver at frequency f based on phases of the values C I and C Q .
- the method 4600 may also include applying a time-domain window to the sampled complex signal prior to said computing of the values C I and C Q , e.g., as describe below in the section “Precise Measurement Technique”.
- a method 4700 may include the operations shown in FIG. 47 .
- the method 4700 may be used to measure I/Q impairments associated with a sampled complex signal produced by a receiver.
- the method 4600 may be performed by a processing agent (e.g., a computer system executing under the control of program instructions).
- the processing agent may direct a device to stimulate the receiver with a stimulus signal having an isolated tone at displacement frequency f and a void interval at displacement frequency ⁇ f.
- the displacement frequencies f and ⁇ f may be interpreted as displacements with respect to a local oscillator frequency of the receiver.
- the sampled complex signal may be a baseband signal produced by the receiver in response the action of stimulating with the stimulus signal.
- the processing agent may compute a Discrete-Time Fourier transform value C I at frequency f of an I component of the sampled complex signal;
- the processing agent may compute a Discrete-Time Fourier transform value C Q at frequency f of a Q component of the sampled complex signal.
- the processing agent may compute a gain imbalance g of the sampled complex signal at frequency f based on magnitudes of the values C I and C Q , where the gain imbalance g includes a gain imbalance of the receiver.
- the processing agent may compute a phase skew ⁇ of the sampled complex signal at frequency f based on phases of the values C I and C Q , where the phase skew ⁇ includes a phase skew of the receiver.
- the processing agent may apply a time-domain window to the sampled complex signal prior to said computing of the values C I and C Q .
- the device that provides the input signal is a calibration tone generator.
- the device is a transmitter whose local oscillator frequency is (intentionally) offset from the receiver's local oscillator frequency by a non-zero amount.
- the sampled complex signal has been subjected to frequency shifting to remove a difference between the local oscillator frequencies, in which case the gain imbalance g and phase skew ⁇ may be partially dependent on the transmitter's I/Q impairments.
- the gain imbalance g and the phase skew ⁇ may represent a composite effect of the transmitter's I/Q impairments, the distortion introduced by the signal path (between the transmitter's I/Q modulator and the receiver's demodulator), and the receiver's I/Q impairments.
- the sampled complex signal is a raw signal from the demodulator that has not been subjected to the above-described frequency shifting, and thus, the gain imbalance g and the phase skew ⁇ may be interpreted as including only impairments introduced by the receiver.
- the method 4700 may also include applying a time-domain window to the sampled complex signal prior to computing the value C I and computing the value C Q , e.g., as described below.
- the receiver is a vector signal analyzer.
- one or more of the operations 4715 through 4730 may be performed by a programmable hardware element.
- one or more of the operations 4715 through 4730 may be performed in dedicated digital circuitry.
- one or more of the operations 4715 through 4730 may be performed by a processor in response to the execution of program instructions.
- the offset local oscillator (LO) method allows for I/Q impairment measurement and carrier leakage measurement of both the receiver (RX) and the transmitter (TX) simultaneously.
- This method uses independently tunable LOs for the transmitter and receiver, e.g., as shown in FIG. 48 .
- the step size of the transmitter LO and/or the step size of the receiver LO can be fractional or integer in nature.
- the step size of the transmitter and/or the step size of the receiver LO should be a small percentage of the total instantaneous bandwidth.
- the transmitter includes an I/Q modulator 4810 and a front end 4815 .
- a complex exponential tone at non-zero displacement frequency f is provided to the I/Q modulator 4810 .
- the I/O modulator 4810 modulates a carrier signal (also referred to as “local oscillator signal”) with the tone to obtain a modulated signal.
- the carrier signal is provided by the transmitter LO 4805 .
- the modulated signal is transmitted onto a transmission medium (e.g., a cable 4820 ) by the transmitter front end 4815 .
- the front end 4830 of the receiver receives the transmitted signal and conditions the received signal to obtain a conditioned signal.
- the I/Q demodulator 4835 demodulates the conditioned signal using a carrier signal provided by the receiver LO 4840 , resulting in a demodulated signal having components denoted as RX I and RX Q.
- shifting the RX and TX carriers off of each other causes the tone, the receiver's image of the tone, the transmitter's image of the tone, the transmitter's carrier leakage and the receiver's carrier leakage to appear at different frequencies.
- the illustrated spectrum is based on the demodulated signal at the receiver.
- the transmitter produces the tone at 31 MHz.
- the spectrum includes two different carrier leakages, one due to the transmitter's LO leakage and one due to the receiver's LO leakage.
- the spectrum also includes two different primary images of the tone, one due to the transmitter's I/Q impairments and one due to the receiver's I/Q impairments.
- the spectrum includes the receiver's image of the transmitter's image, and the receiver's image of the transmitter's carrier leakage, both due to the receiver's I/Q impairments.
- the receiver's carrier is placed 6 MHz below that of the transmitter's carrier. This makes the tone, the transmitter's image and the transmitter's leakage appear 6 MHz higher in frequency at the receiver than at the transmitter. Then, as a result of the I/Q demodulator's impairments, each of these three signals (tone, TX image, and TX leakage) created by the transmitter has a corresponding image after the I/Q demodulator, in addition to the receiver's leakage.
- RxTone TxTone + FreqOffset ( 1.76 )
- TxLeakage FreqOffset ( 1.77 )
- TxImage FreqOffset - TxTone ( 1.78 )
- RxImage - TxTone - FreqOffset ( 1.79 )
- RxLeakage 0 ⁇ ⁇ Hz ( 1.80 )
- RxImageOfTxLeakage - FreqOffset . ( 1.82 )
- Measuring the receiver's I/Q impairments and carrier leakage is performed in the same way as done in the “Precise Measurement Technique” section. However, measuring the transmitter's impairments is generally more involved since there are multiple things to consider. Measuring the transmitter's impairments may involve removing the receiver impairments.
- FIG. 50 shows the received spectrum after removal of the receiver's I/Q impairments. After that removal, the spectrum may be frequency shifted by ⁇ FreqOffset, as shown in FIG. 51 . Now the frequency location of the “tone” in the shifted spectrum is the same as the frequency f at which the tone was originally produced at the transmitter.
- the transmitter's leakage (TX leakage) and transmitter's image (TX image) are at the correct frequency locations ( ⁇ f and zero, respectively) to use the algorithm found in the “Precise Measurement Technique” section once the rotation is calculated and removed. (The rotation may be calculated using the method described in the section “Calculating the Mapping Between and RX and TX”.)
- This algorithm will give an estimate for the transmitter's I/Q impairments and the transmitter's LO leakage vector.
- This method for measuring the transmitter's I/Q impairments will work as long as the signal path (including the transmitter's front end and the receiver's front end) has an even magnitude response and odd phase response. In reality, this is not the case, and even small perturbations in magnitude or phase cause serious problems for the measurements.
- the iterative algorithm removes this issue.
- the iterations of the iterative algorithm involve performing pre-correction (e.g., using the method of the section “Calculating True Single Point Vector Calibration Constants) based on the current estimate of the transmitter's impairments, and removing the best available estimate of the signal path from the impairments measured at the receiver (using the method of the section “Altering the Gain Imbalance and Phase Skew Through a Linear System”).
- the iterative algorithm allows the transmitter impairments to be measured even though there is error in the initial estimate of those impairments.
- Measuring the transmitter's impairments can be optimized one further step by doing everything in the method above except removing the receiver's impairments. Shown in FIG. 52 is the frequency-shifted spectrum without first removing the receiver's impairments. By leaving these impairments in the spectrum, the measured impairment values at frequency f (i.e., 31 MHz in this example) are not exactly equal to the transmitter's I/Q impairments since the receiver's impairments have distorted the measurements. However, the same iterative algorithm used to remove distortions of the RF front ends can also remove the distortions due to the receiver's impairments. While ideally it is better to remove the receiver's impairments, in practice this takes extra time during calibration.
- the receiver's LO is set to 2.400 GHz and the transmitter's LO is set to 2.396 GHz
- measurement corruptions will occur when the transmitted baseband tone is: at 4 MHz since this would place the tone at exactly the RX leakage; at ⁇ 4 MHz since this would place the TX image at the RX leakage; or at 8 MHz since this would place the RX image at the TX leakage.
- the total measureable bandwidth is (TotalBW ⁇ LO_StepSize), while the total symmetric measureable bandwidth is (TotalBW ⁇ 2*LO_StepSize).
- the LO step size must be a fraction of the total instantaneous bandwidth, preferably a small fraction. For example, if the instantaneous bandwidth is 100 MHz, and the LO step size is only 25 MHz, then 75 MHz of the bandwidth is theoretically measureable. In reality, since we typically desire symmetric bandwidth (i.e. +/ ⁇ 25 MHz rather than ⁇ 25 MHz-50 MHz), our symmetric measureable bandwidth is only 50 MHz. In addition, there is also less measureable bandwidth due to roll-off effects at band-edges.
- This section shows how to calculate constants for a true single-point calibration that will perfectly pre-correct at a single location (i.e., perfectly pre-compensate for I/Q impairments at a single frequency f) given knowledge of the I/Q impairments at f and ⁇ f, as indicated in FIGS. 53A and 53B .
- the single-point vector calibration correction 5310 precedes a double-point vector corruption model 5320 .
- a complex exponential tone at frequency f which is provided as input to the single-point vector calibration correction, is pre-distorted to produce a complex signal cos(2 ⁇ ft )+ j ⁇ sin(2 ⁇ ft + ⁇ ).
- the pre-distorted signal is further distorted by the corruption model 5320 , resulting in a corrected output signal that is equal to the original complex exponential tone.
- the goal is to determine the values ⁇ and ⁇ given the values A(f), E B (f), C(f) and E D (f).
- correction coefficients ⁇ and ⁇ given by (1.81) and (1.82) are generally different from the ⁇ and ⁇ used in traditional single-point compensation as described in the section “Performing Traditional Impairment Compensation at a Single Frequency”.
- the traditional single-point compensation values will generally give less than perfect compensation when used as a pre-compensation, i.e., when used in FIGS. 53A and 53B .
- the problems of measuring the amplitude response of receive filter 5525 and the I/Q impairments of the receiver is simplified (relative to the corresponding problems for the transmitter) because the I/Q impairments that result from the I/Q demodulator 5530 occur after the distortion effects of the receive filter 5525 .
- the distortion of the receive filter will alter only the magnitude and phase of the single tone. Then this altered pure tone will be distorted by the I/Q demodulator, creating the I/Q impairments.
- calibrating the receiver we can first remove the receiver's I/Q impairments, leaving only the filter's amplitude and phase response effects and then correct for the filter's amplitude and phase distortion in an additional step if desired.
- the transmitter includes an I/Q modulator 5510 and a transmit filter 5515 .
- both the transmit and receive LOs are shared.
- the I/Q modulator 5510 introduces transmit I/Q impairments. Then these impairments travel through the transmit signal path, cabling, and the receive signal path before finally reaching the I/Q demodulator.
- This path between the I/Q modulator output and the I/Q demodulator input corrupt the transmit I/Q impairments measurement taken at the receiver.
- the I/Q impairments of the demodulator further corrupt the measurement of the transmitter I/Q impairments taken at the receiver.
- the receiver may be based on an alternative RF architecture (i.e., other than a direct conversion architecture) such that the I/Q impairments of the receiver are very small, i.e., small enough to neglect.
- FIG. 55C Shown in FIG. 55C is an example of how the non-flat amplitude response in the signal path corrupts the I/Q impairments seen at the receiver. Coming out of the I/Q modulator are the actual I/Q impairments. Then the transmit signal path corrupts them, followed by a phase rotation due to the electrical delay of the cable, followed by another corruption by the receive signal path. In addition to the amplitude, the phase response (not shown in FIG. 55C ) also creates a different but related problem.
- the I/Q impairments alter the magnitude and phase of the signal coming out of the modulator as described in the section “Magnitude and Phase Corruption from I/Q Impairments” and expressed in equation (4.9) of FIG. 58A .
- the I/Q impairments of the transmitter the very thing we are trying to measure, would need to be known in order to determine the magnitude and phase response of the signal path.
- a better approach to determining the exact I/Q impairments through a signal path is to iterate on the solution. Given a coarse estimate of the amplitude and phase of the signal path and an estimate of the I/Q impairments, the exact I/Q impairments can be determined through enough iterations. (The iterations may be performed using shared LOs or offset LOs, as described in detail below. In the case of shared LOs, the receiver's I/Q impairments need to be known. In the case of offset LOs, the receiver I/Q impairments do not need to be known, although knowing them helps. In both cases, the transmitter's I/Q impairments do not need to be known beforehand.
- the total number of iterations will depend largely on the initial estimates and the performance criteria. Listed below is a procedure for determining the transmitter's impairments for both shared and offset LOs. This procedure measures all calibration frequency locations within the instantaneous bandwidth and only iterates over these measurements once all measurements for a given instantaneous bandwidth have been completed. Given in the section on Optimizations is a modified procedure that obtains the same result but generally requires fewer iterations.
- Remove signal path estimate (e.g., apply the mapping from #3).
- step #8 For each of the measured values in #7, mathematically remove the receiver's gain imbalance and phase skew. This can be done by the calculation described in section “Removing Receiver Impairments from Measured Output Impairments”. This places the measurement of the transmitter before the demodulator.
- step #8 another method is to apply a correction filter at the receiver before step #7 by computing the needed correction (from the section “Wideband I/Q Impairment Equalization”) and passing the captured waveform through the correction. This method is not as accurate because the correction filter has the potential to not be as accurate as the measurement due to limited filter taps.
- step #8 For each of the calculated values in #8, remove the approximately known rotation, scaling, magnitude, and phase by using the transform described in “Altering the Gain Imbalance and Phase Skew through a Linear System”. The rotation and scaling were determined in step #5. After the first iteration, an estimation of the magnitude can also be determined. This places the measurement approximately at the output of the modulator. If the measurement were exactly at the output of the modulator, we would not need this iteration approach. This iterative method is needed because we do not know within the accuracy needed the rotation, scaling, magnitude and phase of the path between the output of the modulator and the input of the demodulator.
- the transmitter's I/Q impairments may be estimated according to the method given in Appendix A.
- FIGS. 56A and 56B show the improvement (i.e., the rate of convergence) of each iteration according to one embodiment of the iterative method.
- the iterative method has a convergence interval of [ ⁇ 3 dB, 3 dB] for magnitude and a convergence interval of [ ⁇ 30 degrees, 30 degrees] for phase.
- the sequence of measurements will diverge.
- FIGS. 56A and 56B show the convergence per iteration for both a magnitude error and phase error.
- This section describes how to optimize the iterative process described above to use less total acquisitions and thus less calibration time.
- the problem with the iteration process described above is that it takes multiple acquisitions for a single wideband measurement within the instantaneous bandwidth in addition to calculating new filters between iterations.
- the total number of acquisitions can be greatly decreased by using a single point vector calibration to iterate on a single point to determine its actual impairment value. Then by stepping through the band, the previous measurement location of the impairments becomes an estimate for the next measurement location. This works well when the impairments are not changing quickly across the band, thus providing good estimates for actual values nearby.
- step #8 For each of the measured values in #7, mathematically remove the receiver's gain imbalance and phase skew. This can be accomplished by the calculation described in the section “Removing Receiver Impairments from Measured Output Impairments”. This places the measurement of the transmitter before the demodulator.
- step #8 another method is to apply a correction filter at the receiver before step #7 by computing the needed correction (from section “Wideband I/Q Impairment Equalization”) and passing the captured waveform through the correction. This method is not as accurate because the correction filter has the potential to not be as accurate as the measurement due to limited filter taps.
- the final gain imbalance and phase skew measurements for the current measurement location are those computed in step #10 and no more iterations are required for this in-band frequency and LO frequency combination.
- the transmitter's I/Q impairments may be estimated using offset LOs as described in Appendix B.
- the transmitter's I/Q impairments may be estimated using shared LOs as described in Appendix C.
- Equation (4.11) specifies the amplitude
- This section describes a method for measuring magnitude, phase, leakage, gain imbalance, and phase skew accurately and quickly. In addition to measurement quality and speed, the method also lends itself well to an FPGA implementation for an even greater computational speedup.
- This method is a stimulus/response method that injects a known signal at the input and then measures the output.
- the stimulus is a pure complex exponential with a frequency equal to the frequency location for the desired measurements.
- this complex exponential is generated by a calibration synthesizer or by the transmitter looped back into the receiver.
- the response is digitized and processed in order to determine corresponding measurements. The rest of this section discusses how the digitized response data is processed to give the measurements of interest.
- Measuring the leakage of the signal does not require shifting and requires just averaging since its spectral components are already located at 0 Hz.
- In order to measure the magnitude and phase of a given tone first mix the complex tone down to 0 Hz by multiplying by a complex exponential with a frequency equal and opposite to the tone frequency. Then average the result over the acquisition length. This again is equivalent to taking a single-point DTFT at the frequency of interest for the complex input signal.
- phase of ⁇ s[n] ⁇ may be computed according to the expression:
- Phase ⁇ ⁇ s ⁇ [ w ] ⁇ tan - 1 ⁇ Im ⁇ ⁇ Sum ⁇ ( s ⁇ [ n ] ⁇ exp ⁇ ( - j ⁇ ⁇ wn ) ) ⁇ Re ⁇ ⁇ Sum ⁇ ( s ⁇ [ n ] ⁇ exp ⁇ ( - j ⁇ ⁇ wn ) ) ⁇ . ( 6.7 ⁇ B )
- the “Q actual” signal is a 26 MHz signal with a 0.6 gain imbalance and 20 degree phase skew compared to the in-phase signal (i.e., the “I Reference” signal).
- the “Q Desired” trace gives the ideal quadrature signal, which is 90 degrees offset from the in-phase signal.
- the ideal quadrature signal can be determined by its orthogonality relative to the in-phase component.
- Q Actual the actual magnitude and phase of the quadrature signal
- FIGS. 60 and 61 Shown in FIGS. 60 and 61 are the magnitudes for the in-phase and quadrature phase signal components, i.e., for the “I Reference” signal and “Q actual signal” in FIG. 59 . Since each component of the complex signal s(t) is a real-valued signal, it is expected to have a symmetric magnitude response. In order to find the gain imbalance g(f), determine the gain of each signal component at the frequency location of the tone, and then divide the Q gain by the I gain as given in equation 6.12.
- Equations 6.8 through 6.11 show how to compute the magnitude and phase of each component. Following the convention of assuming the in-phase signal is perfect and the quadrature phase signal contains all of the impairments, the impairments are computed relative to the in-phase signal reference. (Other conventions are possible, as described variously above. For example, the quadrature signal could just as well have been chosen as the reference.) As a result, the magnitude and phase are computed for each of the I signal and the Q signal by finding the single point DTFT. Then these magnitudes and phases are combined together by equations 6.12 and 6.13 in order to determine the gain imbalance and phase skew of the quadrature signal component.
- I(n,w) is the sampled version of I(t,w)
- Q(n,w) is the sampled version of Q(t,w).
- FIG. 62 illustrates a software embodiment (written in the LabVIEW graphical programming language) for calculating LO Leakage, Amplitude, Gain Imbalance, Image Rejection and Phase Skew.
- the computations of Sum ⁇ Re ( Q ( n,w )exp( ⁇ jwn )) ⁇ Sum ⁇ Im ( Q ( n,w )exp( ⁇ jwn )) ⁇ Sum ⁇ Re ( s[n ]) ⁇ Sum ⁇ Im ( s[n ]) ⁇ are performed by a programmable hardware element (e.g., an FPGA of the receiver).
- FIG. 63 shows a LabVIEW graphical program (VI) that receives the summation values computed by the FPGA, and computes LO Leakage, amplitude, gain imbalance and phase skew based on those summation values and the acquisition length.
- Any of the various computer systems described herein may include software infrastructure for executing computer programs including, e.g., LabVIEW graphical programs.
- a non-rectangular window may be applied to the complex digital signal ⁇ s[n] ⁇ . Any of various standard window types may be used.
- no window is explicitly applied to the complex digital signal. However, by performing computations only over a finite acquisition interval, a rectangle window is implicitly being applied. If we place frequency-planning restrictions on the placement of tones in the spectrum or judge the calculated measurement error to be acceptable, no window needs to be explicitly applied to the complex digital signal. (Thus, we can avoid the memory required for storing the window values, minimizing the hardware utilization.) Otherwise, a window should be used to make the measurements. This section will discuss the derivation for the frequency plan restrictions and the measurement error that results if the restricted frequency plan is not used when using no window.
- equation 5.9 is the equation for the standard DTFT and equation 5.12 gives the closed form solution for a finite geometric series.
- a rectangle window is defined as unity over a finite interval and zero elsewhere.
- its DTFT is given by 5.11.
- the DTFT of the window can be simplified to equation 5.13.
- the log magnitude is given by equation 5.14.
- FIGS. 64-65 show two respective plots of the amplitude spectrum
- the first plot ( FIG. 64 ) corresponds to an acquisition length of 20.
- the second plot ( FIG. 65 ) corresponds to an acquisition length of 128.
- Equations (7.7) and (7.8b) define a 2 ⁇ 2 matrix equation in vector unknown [U( ⁇ ),V( ⁇ )] T , whose solution is given by equations (7.9) and (7.10) in FIG. 67 .
- g out ( ⁇ ) Magnitude ⁇ jU ( ⁇ )+ V ( ⁇ ) g in ( ⁇ )exp( j ⁇ in ( ⁇ )) ⁇ (7.11)
- ⁇ out ( ⁇ ) Phase ⁇ jU ( ⁇ )+ V ( ⁇ ) g in ( ⁇ )exp( j ⁇ in ( ⁇ )) ⁇ . (7.12)
- This calculation method specified by equations (7.23) through (7.25) may be applied to remove the receiver-intrinsic impairments g RX (f) and ⁇ RX (f) from the measured impairments g M (f) and ⁇ M (f) at the output of the receiver (e.g., the output of the I/Q demodulator) in order to obtain the impairments g in (f) and ⁇ in (f) at the input of the receiver (e.g., the input of the I/Q demodulator) as follows:
- a method for operating a receiver comprising:
- I R ( n ) I ( n )
- Q R ( n ) a*I ( n )+ HT ⁇ b*I ( n ) ⁇ + c*Q ( n )+ HT ⁇ d*Q ( n ) ⁇
- HT denotes the Hilbert Transform
- the coefficients a, b, c and d are computed to achieve at least partial compensation for I/Q impairments of the receiver at a frequency f and at frequency ⁇ f, where each of the coefficients is computed based on measured I/Q impairments of the receiver at frequency f and measured I/Q impairments of the receiver at frequency ⁇ f.
- a receiver comprising:
- an I/Q demodulator configured to receive an analog input signal, and perform I/Q demodulation on the analog input signal to produce an analog inphase signal and an analog quadrature signal;
- a digitization unit configure to digitize the analog inphase signal and the analog quadrature signal to produce respectively a digital inphase signal I(n) and a digital quadrature signal Q(n);
- I R ( n ) I ( n )
- Q R ( n ) a*I ( n )+ HT ⁇ b*I ( n ) ⁇ + c*Q ( n )+ HT ⁇ d*Q ( n ) ⁇
- HT denotes the Hilbert Transform
- the coefficients a, b, c and d are computed to at least partially compensate for I/Q impairments of the receiver at a frequency f and at frequency ⁇ f, where each of the coefficients is computed based on measured I/Q impairments of the receiver at frequency f and measured I/Q impairments of the receiver at frequency ⁇ f.
- a method for operating a transmitter comprising:
- I R ( n ) I ( n )
- Q R ( n ) a*I ( n )+ HT ⁇ b*I ( n ) ⁇ + c*Q ( n )+ HT ⁇ d*Q ( n ) ⁇ ,
- HT denotes the Hilbert Transform
- the coefficients a, b, c and d are computed to at least partially pre-compensate for I/Q impairments of the transmitter at frequency f and frequency ⁇ f, where each of the coefficients is computed based on an estimate of the I/Q impairments of the transmitter at frequency f and an estimate of the I/Q impairments of the transmitter at frequency ⁇ f.
- a transmitter comprising:
- I R ( n ) I ( n )
- Q R ( n ) a*I ( n )+ HT ⁇ b*I ( n ) ⁇ + c*Q ( n )+ HT ⁇ d*Q ( n ) ⁇
- HT denotes the Hilbert Transform
- the coefficients a, b, c and d are computed to at least partially pre-compensate for I/Q impairments of the transmitter at frequency f and frequency ⁇ f, where each of the coefficients is computed based on an estimate of the I/Q impairments of the transmitter at frequency f and an estimate of the I/Q impairments of the
- DAC digital-to-analog conversion
- an I/Q modulator configured to perform I/Q modulation on the analog I and Q signals to produce a modulated analog signal.
- a method for correcting for I/Q impairments in a received transmission signal comprising: receiving the transmission signal over a communication medium; performing I/Q demodulation on the received transmission signal to produce analog I (in-phase) and Q (quadrature) signals; performing analog to digital conversion of each of the analog I and Q signals to produce digital I and Q signals; and performing wideband I/Q impairment correction on the digital I and Q signals, where said wideband I/Q impairment correction compensates for frequency-dependent variations of gain imbalance and phase imbalance in the digital I and Q signals.
- providing the plurality of known test signals to the receiver device comprises providing one or more of: a plurality of sine waves at different frequencies; or a plurality of cosine waves at different frequencies.
- receiving the transmission signal over the communication medium comprises receiving the transmission signal over one or more of: a wireless communication medium; or a cable.
- a receiver device configured to: receive a transmission signal over a communication medium; perform I/Q demodulation on the received transmission signal to produce analog I (in-phase) and Q (quadrature) signals; perform analog to digital conversion of each of the analog I and Q signals to produce digital I and Q signals; and perform wideband I/Q impairment correction on the digital I and Q signals, where said wideband I/Q impairment correction compensates for frequency-dependent variations of gain imbalance and phase imbalance in the digital I and Q signals.
- the programmable hardware element comprises a FPGA (field-programmable gate array).
- a method for correcting for I/Q impairments comprising: receiving digital I (in-phase) and Q (quadrature) signals to be transmitted; performing wideband I/Q impairment pre-correction on the digital I and Q signals, where performing the wideband I/Q impairment pre-correction filters one or more of the digital I and Q signals to produce one or more pre-corrected digital signals to pre-compensate for frequency-dependent variations of gain imbalance and phase imbalance that will be subsequently introduced during synthesis of a transmission signal; and synthesizing the transmission signal using the one or more pre-corrected digital signals.
- synthesizing the transmission signal comprises: performing digital to analog conversion of the one or more pre-corrected digital signals to produce one or more of an analog I signal or an analog Q signal; and performing I/Q modulation to produce the transmission signal using the one or more of the analog I signal or the analog Q signal; where the one or more pre-corrected digital signals pre-compensate for frequency-dependent variations of gain imbalance and phase imbalance caused by one or more of the digital to analog conversion or the I/Q modulation.
- providing the plurality of known test signals to the transmitter device comprises providing one or more of: a plurality of sine waves at different frequencies; or a plurality of cosine waves at different frequencies.
- a transmitter device configured to: receive digital I (in-phase) and Q (quadrature) signals to be transmitted; perform wideband I/Q impairment pre-correction on the digital I and Q signals, where performing the wideband I/Q impairment pre-correction filters one or more of the digital I and Q signals to produce one or more pre-corrected digital signals to pre-compensate for frequency-dependent variations of gain imbalance and phase imbalance that will be subsequently introduced during synthesis of a transmission signal; and synthesize the transmission signal using the one or more pre-corrected digital signals.
- the programmable hardware element comprises a FPGA (field-programmable gate array).
- a measurement system including: a receiver device; and a device under test; where the receiver device is configured to: receive a transmission signal including measurement data acquired from the device under test; perform I/Q demodulation on the received transmission signal to produce analog I (in-phase) and Q (quadrature) signals; perform analog to digital conversion of each of the analog I and Q signals to produce digital I and Q signals; and perform wideband I/Q impairment correction on the digital I and Q signals, where said wideband I/Q impairment correction compensates for frequency-dependent variations of gain imbalance and phase imbalance in the digital I and Q signals.
- the measurement system of paragraph 34 further comprising: a transmitter device, where the transmitter device is configured to: receive digital I and Q signals to be transmitted, where the digital I and Q signals specify information to be transmitted to the device under test; perform wideband I/Q impairment pre-correction on the digital I and Q signals, where performing the wideband I/Q impairment pre-correction filters one or more of the digital I and Q signals to produce one or more pre-corrected digital signals to pre-compensate for frequency-dependent variations of gain imbalance and phase imbalance that will be subsequently introduced during synthesis of a transmission signal; synthesize the transmission signal using the one or more pre-corrected digital signals; and transmit the transmission signal to the device under test.
- a transmitter device where the transmitter device is configured to: receive digital I and Q signals to be transmitted, where the digital I and Q signals specify information to be transmitted to the device under test; perform wideband I/Q impairment pre-correction on the digital I and Q signals, where performing the wideband I/Q impairment pre-correction filters one or more of the digital I
- FIG. 68 illustrates one embodiment of a computer system 6800 that may be used to perform any of the method embodiments described herein, or, any combination of the method embodiments described herein, or any subset of any of the method embodiments described herein, or, any combination of such subsets.
- Computer system 6800 may include a processing unit 6810 , a system memory 6812 , a set 6815 of one or more storage devices, a communication bus 6820 , a set 6825 of input devices, and a display system 6830 .
- System memory 6812 may include a set of semiconductor devices such as RAM devices (and perhaps also a set of ROM devices).
- Storage devices 6815 may include any of various storage devices such as one or more memory media and/or memory access devices.
- storage devices 6815 may include devices such as a CD/DVD-ROM drive, a hard disk, a magnetic disk drive, magnetic tape drives, etc.
- Processing unit 6810 is configured to read and execute program instructions, e.g., program instructions stored in system memory 6812 and/or on one or more of the storage devices 6815 .
- Processing unit 6810 may couple to system memory 6812 through communication bus 6820 (or through a system of interconnected busses, or through a network).
- the program instructions configure the computer system 6800 to implement a method, e.g., any of the method embodiments described herein, or, any combination of the method embodiments described herein, or, any subset of any of the method embodiments described herein, or any combination of such subsets.
- Processing unit 6810 may include one or more processors (e.g., microprocessors).
- Input devices 6825 may include devices such as a keyboard, a mouse, a touch-sensitive pad, a touch-sensitive screen, a drawing pad, a track ball, a light pen, a data glove, eye orientation and/or head orientation sensors, a microphone (or set of microphones), or any combination thereof.
- the display system 6830 may include any of a wide variety of display devices representing any of a wide variety of display technologies.
- the display system may be a computer monitor, a head-mounted display, a projector system, a volumetric display, or a combination thereof.
- the display system may include a plurality of display devices.
- the display system may include a printer and/or a plotter.
- the computer system 6800 may include other devices, e.g., devices such as one or more graphics accelerators, one or more speakers, a sound card, a video camera and a video card, a data acquisition system.
- devices such as one or more graphics accelerators, one or more speakers, a sound card, a video camera and a video card, a data acquisition system.
- computer system 6800 may include one or more communication devices 6835 , e.g., a network interface card for interfacing with a computer network.
- the communication device 6835 may include a specialized interface for communication via any of a variety of established communication standards or protocols (e.g., USB, Firewire, PCI, PCI Express, PXI).
- the computer system may be configured with a software infrastructure including an operating system, and perhaps also, one or more graphics APIs (such as OpenGL®, Direct3D, Java 3DTM).
- the software infrastructure may include National Instruments LabVIEWTM software, and/or, LabVIEWTM FPGA.
- the computer system 6800 may be configured to interface with transmitter 6840 .
- the transmitter may be configured to transmit signals (onto a communication channel) as variously described herein.
- the transmitter may operate under the control of software executing on processor 6810 and/or software executing on the transmitter itself.
- the computer system 6800 may be configured to interface with a receiver 6850 .
- the receiver may be configured to receive signals (from a communication channel) as variously described herein.
- the receiver may operate under the control of software executing on processor 6810 and/or software executing on the receiver itself.
- the transmitter and/or the receiver may include one or more programmable hardware elements and/or one or more microprocessors for performing digital processing on digital data (e.g., on digital baseband signals or digital IF signals) as variously described herein.
- digital data e.g., on digital baseband signals or digital IF signals
- the set of frequency offsets is symmetric about zero, i.e., for each frequency offset f in the set, the frequency offset ⁇ f is also in the set.
- the gain imbalance gR and phase skew ⁇ R are computed based on the complex baseband sequence z(n) as described in the “Precise Measurement Technique” section.
- the tone K is applied because the leakage can be sensitive to in-band power.
- the tone K is applied at some frequency in the instantaneous bandwidth other than DC.
- the frequency-shifting operations may be performed using a signal FS(n) whose phase is continuous in time and runs at rate ⁇ LO.
- the frequency shift operation may be implemented in an FPGA of the receiver.
- the frequency shifting operation may execute at the sample rate of the receiver's ADC, i.e., may generate a new output value FSz(n) for each new ADC data vector z(n).
- the ADC sample clock may be provided as an input to the FPGA.
- the phase-continuity of the signal FS would then be guaranteed by the phase continuity of the ADC sample clock.
- the ADC sample clock is phase locked to the local oscillators.
- the frequency shift operation may be performed in software.
- the present iterative method involves repeated acquisitions of the signal z(n) from the I/Q demodulator.
- software is supplied with information regarding the time difference between the start of the present acquisition and the start of the first acquisition (or the start of the previous acquisition).
- software may be supplied with the time of the first sample z(0) of the present acquisition relative to the time of the first sample z(0) of the first acquisition.
- m be defined as a continuously-running sample count and n be the sample count of the present acquisition.
- k be defined by the sample distance between the current acquisition and the first acquisition for the first sample z(0).
- Step 9 Remove the receiver's gain imbalance gR(v) and phase skew ⁇ R(v) from the raw gain imbalance gz(v) and raw phase skew ⁇ z(v) to obtain pre-demodulation gain imbalance gPD(v) and pre-demodulation phase skew ⁇ PD(v).
- the mathematical transformation method is described in the section “Removing Receiver Impairments from Measured Output Impairments”. 9.
Landscapes
- Engineering & Computer Science (AREA)
- Computer Networks & Wireless Communication (AREA)
- Signal Processing (AREA)
- Physics & Mathematics (AREA)
- Electromagnetism (AREA)
- Quality & Reliability (AREA)
- Power Engineering (AREA)
- Nonlinear Science (AREA)
- Digital Transmission Methods That Use Modulated Carrier Waves (AREA)
Abstract
Description
H(f)(1+g(f)exp(jφ(f)),
where H(f) is a spectrum of a linear system model of the electrical system, where g(f) is a gain imbalance at the complex input, where φ(f) is a phase skew at the complex input. A spectrum B(f) is computed according to the expression
H(−f)(1−g(f)exp(−jφ(f)).
I(t)=y(t)cos(ωt)
Q(t)=y(t)sin(ωt).
I F(n)=h 11(n)*I(n)+h 12(n)*Q(n)
Q F(n)=h 21(n)*I(n)+h 22(n)*Q(n),
where the symbol “*” represents convolution. (Note, elsewhere in this patent disclosure, the symbol “*” may mean convolution or multiplication, depending on the particular context. As a superscript, “*” denotes complex conjugation.)
I F(n)=h 11(n)*I(n)
with only one convolution circuit. Similarly, if one of the components of the 2×2 matrix is a unit impulse at time n=0, then the receiver need not include a multiplier to perform that trivial convolution. For example, if h11(n) is a unit impulse, then IF(n) may be simply computed according to the expression
I F(n)=I(n)+h 12(n)*Q(n)
with only one convolution unit and one adder. Thus, filtering “in accordance with a 2×2 matrix of digital filters” does not necessarily require a full 2×2 array of convolution circuits in all cases.
I F(n)=h 11(n)*I(n)+h 12(n)*Q(n),
Q F(n)=h 21(n)*I(n)+h 22(n)*Q(n).
where ω is the carrier frequency.
cos(ωt)+jg(ω)sin(ωt+φ(ω))
gets transformed to corrected signal cos(ωt)+j sin(ωt) for all frequencies ω in a frequency band (e.g., a frequency band that is symmetric about zero), or at least at selected frequencies where measurements of the impairments g(ω) and φ(ω) are available. g(ω) is the gain imbalance corresponding to frequency ω, and φ(ω) is the phase skew corresponding to frequency ω. Thus, we obtain the equation:
u(t)*cos(ωt)+v(t)*g(ω)sin(ωt+φ(ω))=sin(ωt),
where “*” denotes convolution, where u(t) and v(t) are the impulse responses corresponding respectively to the frequency responses U(ω) and V(ω).
cos(θ)=(½){exp(jθ)+exp(−jθ)}
sin(θ)=(−j/2){exp(jθ)−exp(−jθ)},
we obtain the equation
(½)U(ω)exp(jωt)+(½)U(−ω)exp(−jωt)+(−j/2)V(ω)g(ω)exp(jφ(ω))exp(jωt)+(j/2)V(−ω)g(ω)exp(−jφ(ω))exp(−jωt)=(−j/2)[exp(jωt)−exp(−jωt)}.
jU(ω)+V(ω)g(ω)exp(jφ(ω))=1 (a):
jU(−ω)−V(−ω)g(ω)exp(−jφ(ω))=−1. (b):
Because equation (b) holds for all ω, we can replace ω with −ω, thus obtaining equation (b′) below.
jU(ω)−V(ω)g(−ω)exp(−jφ(−ω)=−1. (b′):
U(ω)=A(ω)+B(ω)
A(ω)=(½){U(ω)+U(−ω)}
B(ω)=(½){U(ω)−U(−ω)}
V(ω)=C(ω)+D(ω)
C(ω)=(½){V(ω)+V(−ω)}
D(ω)=(½){V(ω)−V(−ω)}.
u(t)=a(t)+b(t)
a(t)=(½){u(t)+u(−t)}
b(t)=(½){u(t)−u(−t)}
v(t)=c(t)+d(t)
c(t)=(½){v(t)+v(−t)}
d(t)=(½){v(t)−v(−t)},
where u, a, b, v, c, and d are the impulse responses corresponding respectively to frequency responses U, A, B, V, C and D.
E B(ω)=jB(ω)sgn(ω)
is even and has the property that:
b(t)*x(t)=HT(e B(t)*x(t)),
where HT is the Hilbert transform operator, where b(t) is the impulse response corresponding to B(ω), and x(t) is an arbitrary input function, where sgn(ω) is 1 if ω is greater than zero and −1 if ω is less than zero.
U(ω)=−tan(φ(ω))
V(ω)=1/{g(ω)cos φ(ω)}.
where IR(n) and QR(n) represent the resultant digital I signal and the resultant digital Q signal respectively. The 2×2 matrix c may be configured to post-compensate (or, at least partially post-compensate) for measured I/Q impairments of the receiver at a particular frequency f.
g in(f)exp(jφ in(f))={1−jU(f)}/V(f).
The matrix constants may then be determined based on gin(f) and φin(f), e.g., according to the relations α=gin(f)sin(φin(f)) and β=gin(f)cos(φin(f)).
I′(t)=g I(f)cos(2πft+φ I(f))
Q′(t)=g Q(f)sin(2πft+φ Q(f)).
g(f)=g Q(f)/g I(f)
φ(f)=φQ(f)−φI(f).
Q′(t)=g(f)sin(2πft+φ(f)).
(We have switched from f to ω=2πf merely for the sake of notational brevity.) Thus, in response to the stimulus signal exp(jωt), the system produces a complex exponential tone at frequency ω with complex amplitude ATONE(ω) and a complex exponential tone at frequency −ω with complex amplitude AIMAGE(ω).
A TONE=(½){1+g(ω)exp[φ(ω)]}
A IMAGE=(½){1−g(ω)exp[−φ(ω)]}.
Image_Rejection=20*log(|A IMAGE |/|A TONE|).
cos(ωt)+jg(ω)sin(ωt+φ(ω)),
where g(ω) and φ(ω) are the I/Q impairments of the system at frequency ω. The compensation block operates on the distorted complex signal to generate a corrected output signal equal to the original complex exponential tone at frequency ω. Thus, the compensation block is said to “compensate” or “post-compensate” for the I/Q impairments of the system at frequency ω. Wideband post-compensation of I/Q impairments means post-compensating for I/Q impairments at each frequency ω in a frequency range or frequency band.
cos(ω0 t)+jg(ω0)sin(ω0 t+φ(ω0))
will be mapped to the corrected output signal cos(ω0t)+j sin(ω0t), as desired. The appropriate values are:
α=−tan(φ(ω0))
β=1/{g(ω0)cos(φ(ω0))}.
I(t)+jQ(t)=cos(2πft)+jg(f)sin(2πft+φ(f))
in response to being stimulated by the complex exponential signal i(t)+jq(t)=exp(j2πft) at frequency f. The gain imbalance g(f) and the phase skew φ(f) are the I/Q impairments of the system G at frequency f. System G may represent the baseband equivalent of the receiver's front end, i.e., the portions of the receiver from its RF input to the output of the I/Q digitization unit. Alternatively, in the situation where the receiver is expected to compensate for the transmitter's I/Q impairments as well as for its own, system G may represent the path from the input of the transmitter's I/Q DAC unit to the output the receiver I/Q digitization unit.
{exp(j2πft): f in given frequency range}
forms a basis for the space of functions {x(t)} that are band limited to the given frequency range. Because the series combination of G followed by H is an identity map on each function of the basis set B, by linearity it will be an identity map on all band-limited functions x(t).
I(t)+Q(t)=cos(2πft)+jg(f)sin(2πft+φ(f)),
and, in response to that basis function, generating a pre-compensated complex signal
I′(t)+jQ′(t)=exp(j2πft),
as shown in
{cos(2πft)+jg(f)sin(2πft+φ(f)): f in given frequency range}
also forms a basis for the space of functions {x(t)} that are band limited to the given frequency range.
i(t)+jq(t)=cos(2πft)+jg(f)sin(2πft+φ(f)),
where g(f) and φ(f) represent the gain imbalance and phase skew of the system G at frequency f. Because the series combination of H followed by G is an identity map on each function of the basis set X, it will be an identity map on all band-limited functions x(t). Thus, when stimulated by a complex exponential tone exp(j2πft) at any frequency f in the frequency band, the series combination will produce that same complex exponential tone at its final output, as shown in
I′(t)=I(t)
Q′(t)=u(t)*I(t)+v(t)*Q(t),
where u(t) and v(t) are the impulse responses corresponding to U(f) and V(f) respectively.
|X(f)|=|X(−f)|
Phase{X(−f)}=−Phase{X(f)}
for all f, where X(f) is the Fourier transform of x(t). As a result, the frequency response V(f) cannot apply independent impairment corrections at frequencies f and −f. In the typical situation g(f) and g(−f) are different, and φ(f) and φ(−t) are different. Thus, the filter V acting by itself (i.e., with U identically equal to zero) is not sufficient to provide correction at f and −f. If the goal was to only correct for the wideband I/Q impairments over positive frequencies only or over negative frequencies only, the filter V would suffice. (Note: V acting by itself can correct for +f and −f impairments as long as the impairments are constrained to g(f)=g(−f) and φ(f)=−φ(−f), as demonstrated in the “Adding Constraints” section.) However, since it is desirable to correct for both sides of the spectrum, the second filter U(f) is introduced. Applying another filter from in-phase component and summing it into the quadrature-phase channel provides the needed degrees of freedom to control both sides of the complex spectrum. This is due to the fact that the in-phase component I(t)=cos(2πft) is that same for frequencies f and −f, while the quadrature-phase component changes its phase by 180 degrees when changing from f to −f.
I 1(t)+jQ 1(t)=cos(2πft)+g(f)sin(2πft+φ(f)),
and the second based on the input
I 2(t)+jQ 2(t)=cos(2πft)−g(−f)sin(2πft−φ(−f)),
with f>0 for both equations.
−(π/2)sgn(f).
g 1(f)=g(f) for f>0
g 2(f)=g(−f) for f>0
φ1(f)=φ(f) for f>0
φ2(f)=φ(−f) for f>0.
0=A(f)+C(f)g 1(f)sin(φ1(f))−E D(f)g 1(f)cos(φ1(f)) (1.3)
−1=−E B(f)−C(f)g 1(f)cos(φ1(f))−E D(f)g 1(f)sin(φ1(f)) (1.4)
0=A(f)+C(f)g 2(f)sin(φ2(f))+E D(f)g 2(f)cos(φ2(f)) (1.5)
1=−E B(f)+C(f)g 2(f)cos(φ2(f)−E D(g 2(f)sin(φ2(f) (1.6)
Det(P)=w 2 +x 2 +y 2 +z 2−2wy+2xz. (1.13)
Det(P)=g 1 2(f)+g 2 2(f)+2g 1(f)g 2(f)cos(φ1(f)+(φ2(f)) (1.14)
g 1 2(f)+g 2 2(f)+2g 1(f)g 2(f)cos(φ1(f)+φ2(f))≠0 (1.15)
there exists a unique solution vector (A(f),EB(f),C(f),ED(f)). As an example, the equations cannot be solved when both the phase skew φ(f) and gain imbalance g(f) are completely odd. However, it does not make sense for the gain imbalance g(f) to be completely odd since the gain imbalance is typically close to one for all f, or at least bounded below by a positive constant.
A(f)=−2(wz+xy)/Det(P). (1.16)
E B(f)=(−w 2 −x 2 +y 2 +z 2)/Det(P) (1.17)
C(f)=2(x+z)/Det(P) (1.18)
E D(f)=2(w−y)/Det(P). (1.19)
A(f)=0 (1.24)
E B(f)={g 2(f)−g 1(f)}/{g 1(f)+g 2(f)} (1.25)
C(f)=2 cos(φ(f))/{g 1(f)+g 2(f)} (1.26)
E D(f)=2 sin(φ(f))/{g 1(f)+g 2(f)}. (1.27)
A(f)=0 (1.32)
E B(f)=0 (1.33)
C(f)=cos(φ(f))/g(f) (1.34)
E D(f)=sin(φ(f))/g(f). (1.35)
A(f)=0 (1.36)
E B(f)={g 2(f)−g 1(f)}/{g 2(f)+g 1(f)} (1.37)
C(f)=2/{g 2(f)+g 1(f)} (1.38)
E D(f)=0. (1.39)
for f>0, as shown in
g 1(f)=g(f) for f>0
g 2(f)=g(−f) for f>0
φ1(f)=φ(f) for f>0
φ2(f)=φ(−f) for f>0.
g 1(f)sin(φ1(f))=A(f)−E D(f) (1.50)
g 1(f)cos(φ1(f))=E B(f)+C(f) (1.51)
g 2(f)sin(φ2(f))=A(f)+E D(f) (1.52)
g 2(f)cos(φ2(f))=C(f)−E B(f)
A(f)=(½){g 1(f)sin(φ1(f))+g 2(f)sin(φ2(f))} (1.56)
E B(f)=(½){g 1(f)cos(φ1(f))−g 2(f)cos(φ2(f))} (1.57)
C(f)=(½){g 1(f)cos(φ1(f))+g 2(f)cos(φ2(f))} (1.58)
E D(f)=(½){−g 1(f)sin(φ1(f))+g 2(f)sin(φ2(f))}. (1.59)
B(f)=−jE B(f)sgn(f) and
D(f)=−jE D(f)sgn(f).
A(f)=0
E B(f)=0
C(f)=g(f)cos(φ(f))
E D(f)=−g(f)sin(φ(f)).
A(f)=g(f)sin(φ(f))
E B(f)=0
C(f)=g(f)cos(φ(f))
E D(f)=0.
A(f)=g sin(φ) (1.60)
E B(f)=0 (1.61)
C(f)=g cos(ω) (1.62)
E D(f)=0. (1.63)
I′(n)=B I
Q′(n)=B Q.
(Vector B need not be real as shown in
Map=m(0)exp(jθ(0))=B′/B.
InverseMap=exp(−j(θ(0))/m(0)=B/B′.
B′=C′=A′ (1.64)
InvMap=B/B′ (1.65)
A=A′*InvMap. (1.66)
I′(n)=I(n)−A I
Q′(n)=Q(n)−A Q.
Diff=SecondAvg−FirstAvg.
θ(0)=Phase(Diff)/Phase(B).
I′(t)=g I(f)cos(2πft+φ I(f))
Q′(t)=g Q(f)sin(2πft+φ Q(f)).
g′(f)=g Q(f)/g I(f)
φ′(f)=φQ(f)−φI(f).
g I(f)exp(jφ I(f))+g Q(f)exp(jφ Q(f))=H(f){1+g(f)exp(jφ(f))} (1.63)
g I(f)exp(−jφ I(f))−g Q(f)exp(−jφ Q(f))=H(−f){1−g(f)exp(−jφ(f))}. (1.64)
A(f)=H(f){1+g(f)exp(jφ(f))} (1.65)
B(f)=H(−f){1−g(f)exp(−jφ(f))}. (1.66)
g I(f)exp(jφ I(f))=w(f)+jx(f) (1.67)
g Q(f)exp(jφ Q(f))=y(f)+jz(f). (1.68)
w(f)+jx(f)+y(f)+jz(f)=A(f) (1.69)
w(f)−jx(f)−y(f)+jz(f)=B(f), (1.70)
and thus,
w(f)=(½)Re{A(f)+B(f)}
x(f)=(½)Im{A(f)−B(f)}
y(f)=(½)Re{A(f)−B(f)}
z(f)=(½)Im{A(f)+B(f)}.
The method below describes how to iteratively measure the TX impairments when the magnitude and phase of the signal path transfer function H(f) are only approximately known. Part of that iterative measurement method involves using the equations derived in this section to compute the I/Q impairments at the output of the transmitter's I/Q modulator based on the I/Q impairments at the input (or alternatively, at the output) of the receiver's I/Q demodulator. To perform this computation, the frequency response H(f) is set equal to the inverse of an estimate of the frequency response of the signal path. Different estimates of the signal path frequency response may be used in different circumstances.
H(f){1+g(f)exp(jφ(f)},
where H(f) is a spectrum of a linear system model of the electrical system, where g(f) is a gain imbalance at the complex input zIN, where φ(f) is a phase skew at the complex input zIN.
H(−f){1−g(f)exp(−jφ(f))}.
Sum(f)=A(f)+B(f),
Diff(f)=A(f)−B(f).
H(f)=exp{−jθ(0)}/m(0).
where I(n) and Q(n) denote respectively the inphase and quadrature components of the sampled complex signal. In one embodiment, the matrix M may have the special form
and the constants m21 and m22 may be determined from a receiver's gain imbalance gRX(f−ΔLO) and receiver's phase skew φRX(f−ΔLO) at frequency f−ΔLO based on the expressions:
FreqOffset=TxCarrierFrequency−RxCarrierFrequency, (1.75)
the frequency locations (as seen by the receiver) of the spectral features in the received spectrum are:
{N*FreqOffset: N=−3,−2,−1,0,1,2,3}.
cos(2πft)+jΓ sin(2πft+θ).
α=Γ sin(θ) (1.75)
β=Γ cos(θ). (1.76)
CΓ sin(θ)−E DΓ cos(θ)=−A (1.77)
CΓ cos(θ)+E DΓ sin(θ)=1−E B (1.78)
HT{sin(t)}=−cos(t),
HT{cos(t)}=sin(t),
where HT denotes the Hilbert Transform. Equations (1.77) and (1.78) imply:
A(f)=g(f)sin(φ(f))
E B(f)=0
C(f)=g(f)cos(φ(f))
E D(f)=0.
Thus, equations (1.81) and (1.82) will specialize to:
α=−tan(φ(f))
β=1/{g(f)cos(φ(f))},
which are the same values used by the traditional single-point compensation.
[Δf/2,−Δf/2,2*Δf/2,−2*Δf/2,3*Δf/2,−3*Δf/2, . . . ,N*Δf/2,−N*Δf/2]
for integer N, where Δf is the spacing of frequency measurement locations within instantaneous bandwidth. This allows for the maximum benefit of the optimization since it creates the best estimate of the new point to be measured by using its neighbor. Since this method uses a true single-point calibration of the transmitter, it requires information about the impairments at both the tone location and its image. This is the reason for alternating between positive and negative frequencies. This alternating frequency plan is also assumed for the following numbered procedure.
s(f,t)=cos(2πft)+jg(f)sin(2πft+φ(f))
includes a tone at frequency f and an image at frequency −f
In an alternative embodiment, ∥I (w)∥, Phase{I(w)}, ∥Q(w)∥ and Phase{Q(w)} may be calculated as follows:
where N is the acquisition size.
Sum{Re(Q(n,w)exp(−jwn))}
Sum{Im(Q(n,w)exp(−jwn))}
Sum{Re(s[n])}
Sum{Im(s[n])}
are performed by a programmable hardware element (e.g., an FPGA of the receiver).
Ftone+/−N*SampleRate/AcqLength,
Ftone is the tone frequency, and AcqLength is the number of samples in the acquisition of the complex digital signal, and SampleRate is the rate at which the samples of the complex digital signal are acquired. Also note that for the image rejection calculation, if we make sure that all generated tones exist only at multiples of SampleRate/AcqLength, then there won't be any spectral leakage effects in the measurement.
u(t)*cos(ωt)+v(t)*g in(ω)sin(ωt+φ in(ω))=g out(ω)sin(ωt+φ out(ω)), (7.5)
where u(t) and v(t) are the impulses responses corresponding to U(ω) and V(ω) respectively.
U(ω)exp(jωt)/2+U(−ω)exp(−jωt)/2+V(ω)g in(ω)exp{j(ωt+φ in(ω))}/2j−V(−ω)g in(ω)exp{−j(ωt+φ in(ω))}/2j=g out(ω)exp{j(ωt+φ out(ω))}/2j−g out(ω)exp{−j(ωt+φ out(ω))}/2j. (7.6)
jU(ω)+V(ω)g in(ω)exp(jφ in(ω))=g out(ω)exp(jφ out(ω)) (7.7)
jU(−ω)−V(−ω)g in(ω)exp(−jφ in(ω))=−g out(ω)exp(−jφ out(ω)). (7.8a)
jU(ω)−V(ω)g in(−ω)exp(−jφ in(−jφ in(−ω))=−g out(−ω)exp(jφ out(−ω)). (7.8b)
g out(ω)=Magnitude{jU(ω)+V(ω)g in(ω)exp(jφ in(ω))} (7.11)
φout(ω)=Phase{jU(ω)+V(ω)g in(ω)exp(jφ in(ω))}. (7.12)
jU(f)+V(f)g in(f)exp(jφ in(f))=g out(f)exp(jφ out(f)) (7.13)
g in(f)exp(jφ in(f))={−jU(f)+g out(f)exp(jφ out(f))}/V(f). (7.14)
Z in(f)=g in(f)exp(jφ in(f)) and (7.15)
Z out(f)=g out(f)exp(jφ out(f)), (7.16)
equation (7.14) can be more compactly expressed as:
Z in(f)={−jU(f)+Z out(f)}/V(f). (7.17)
U(f)=(j/2){g sys(−f)exp(−jφ sys(f))−g sys(f)exp(jφ sys(f))} (7.18)
V(f)=(½){g sys(f)exp(jφ sys(f))+g sys(−f)exp(−jφ sys(−f))}. (7.19)
Z sys(f)=g sys(f)exp(jφ sys(f)), (7.20)
equations (7.15) and (7.16) can be expressed as:
U(f)=(j/2){Z sys(−f)*−Z sys(f)} (7.21)
V(f)=(½){Z sys(f)+Z sys(−f)*}. (7.22)
This calculation method specified by equations (7.23) through (7.25) may be applied to remove the receiver-intrinsic impairments gRX(f) and φRX(f) from the measured impairments gM(f) and φM(f) at the output of the receiver (e.g., the output of the I/Q demodulator) in order to obtain the impairments gin(f) and φin(f) at the input of the receiver (e.g., the input of the I/Q demodulator) as follows:
I R(n)=I(n),
Q R(n)=a*I(n)+HT{b*I(n)}+c*Q(n)+HT{d*Q(n)},
where HT denotes the Hilbert Transform, where the coefficients a, b, c and d are computed to achieve at least partial compensation for I/Q impairments of the receiver at a frequency f and at frequency −f, where each of the coefficients is computed based on measured I/Q impairments of the receiver at frequency f and measured I/Q impairments of the receiver at frequency −f.
I R(n)=a*I(n)+HT{b*I(n)}+c*Q(n)+HT{d*Q(n)},
Q R(n)=Q(n).
I R(n)=I(n),
Q R(n)=a*I(n)+HT{b*I(n)}+c*Q(n)+HT{d*Q(n)},
where HT denotes the Hilbert Transform, where the coefficients a, b, c and d are computed to at least partially compensate for I/Q impairments of the receiver at a frequency f and at frequency −f, where each of the coefficients is computed based on measured I/Q impairments of the receiver at frequency f and measured I/Q impairments of the receiver at frequency −f.
I R(n)=a*I(n)+HT{b*I(n)}+c*Q(n)+HT{d*Q(n)},
Q R(n)=Q(n).
I R(n)=I(n),
Q R(n)=a*I(n)+HT{b*I(n)}+c*Q(n)+HT{d*Q(n)},
I R(n)=a*I(n)+HT{b*I(n)}+c*Q(n)+HT{d*Q(n)},
Q R(n)=Q(n).
I R(n)=I(n),
Q R(n)=a*I(n)+HT{b*I(n)}+c*Q(n)+HT{d*Q(n)},
where HT denotes the Hilbert Transform, where the coefficients a, b, c and d are computed to at least partially pre-compensate for I/Q impairments of the transmitter at frequency f and frequency −f, where each of the coefficients is computed based on an estimate of the I/Q impairments of the transmitter at frequency f and an estimate of the I/Q impairments of the transmitter at frequency −f;
I R(n)=a*I(n)+HT{b*I(n)}+c*Q(n)+HT{d*Q(n)},
Q R(n)=Q(n).
2. Configure the receiver and transmitter so that they use the same LO frequency fLO. If the receiver and transmitter use two different LO circuits, tune the transmitter so that its LO is phase locked to the same reference. Therefore, the frequency of the transmitter and the frequency of the receiver are both fLO.
3. Connect the transmitter's output to the receiver's input, e.g., via a cable or a wireless connection.
4. Estimate the DC scaling m(0) and DC rotation θ(0) of the signal path between transmitter's I/Q modulator and the receiver's I/Q demodulator by using the algorithm in the section “Calculating the Mapping Between and RX and TX”. For the best results, apply a tone K to the transmitter's I/Q modulator in addition to the DC test vector. The tone K is applied because the leakage can be sensitive to in-band power. The tone K is applied at some frequency in the instantaneous bandwidth other than DC. (As part of the estimation of the DC scaling and DC rotation, the method of the “Precise Measurement Technique” section is applied to sampled complex data. If the sampled complex data is not windowed, then there are restrictions on the frequency placement of the tone K.)
5. Iteration index k←0
-
- Do while (quality measure Q is smaller than threshold)
- For each frequency offset f:
- Set gT(f,0)→1 and φT(f,0)←0.
6A. If k=0:
- Set gT(f,0)→1 and φT(f,0)←0.
- For each frequency offset f:
- Apply no pre-correction at the transmitter, i.e., configure the transmitter's pre-correction circuitry to use the values α=0 and β=1.
- Else (k>0)
- Compute pre-correction coefficients α and β for frequency offset f based on: current transmitter gain imbalance estimate gT(f,k); current transmitter phase skew estimate φT(f,k); current transmitter gain imbalance estimate gT(−f,k); current transmitter phase skew estimate φT(−f,k). (If the frequency offset set is not symmetric about zero, select the frequency closest to −f for gT(−f,k) and φT(−f,k).) Alternatively, one could create transmitter pre-correction filters.
- Endif
- Configure the pre-correction circuitry to use the computed values α and β (or the pre-correction filters).
7A. Apply a complex exponential signal u(n)=exp(j2πfn) to the inputs of the pre-correction circuitry.
7B. Measure complex baseband signal z(n) at the output of the receiver's I/Q demodulator.
7C. Determine raw gain imbalance gz(f) and raw phase skew φz(f) based on the complex baseband signal z(n) using the calculation method in “Precise Measurement Technique”.
8. Remove the receiver's gain imbalance gR(f) and phase skew φR(f) from the raw gain imbalance gz(f) and raw phase skew φz(f) to obtain pre-demodulation gain imbalance gPD(f) and pre-demodulation phase skew φPD(f). (There are at least two methods for performing this removal: a direct-transformation method and a filtering method. The direct-transformation method may be of higher quality than the filtering method. The direct-transformation method is discussed in the section entitled “Removing Receiver Impairments from Measured Output Impairments”. The filtering method involves applying a 2×2 matrix of digital filters to the complex baseband signal z(n)=(I(n),Q(n)) to obtain a partially-corrected signal PCS(n). The 2×2 matrix of digital filters may be computed as described above in connection withFIGS. 2A , 2B and 3 and in the section “Wideband I/Q Impairment Equalization”.
9. Remove the best current estimate of the signal path between the transmitter's I/Q modulator and the receiver's I/Q demodulator. m(0) and θ(0) will provide a basic estimate. Better estimates will increase the rate of convergence. For example,step 9 may be implemented as follows. - If k=0
- Remove the estimated DC scaling m(0) and DC rotation θ(0) from the gain imbalance gPD and the phase skew φPD to obtain post-modulation gain imbalance gPM and post-modulation phase skew φPM using the transform described in “Altering the Gain Imbalance and Phase Skew through a Linear System”. Set H(f) and H(−f) equal to H(0)=exp(−jθ(0))/m(0).
- Else (k>0)
- Compute scaling m(f) at frequency offset f based on the complex baseband signal z(n). The scaling m(f) may be determined by computing the magnitude of the frequency component at frequency f in the complex signal z(n), as explained in the “Precise Measurement Technique” section, especially in equation 6.6.
- Remove the estimated linear signal path from the gain imbalance gPD(f) and the phase skew φPD(f) to obtain post-modulation gain imbalance gPM(f) and post-modulation phase skew φPM(f) by using the transform described in “Altering the Gain Imbalance and Phase Skew through a Linear System”, with
H(f)=exp(−jθ(0))/m(f) and H(−f)=exp(−jθ(0))/m(−f).
- Note: If −f has not yet been visited by the frequency offset loop, use the m(−f) computed in the previous quality iteration k−1.
10. Generate update for transmitter gain imbalance gT and transmitter phase skew φT according to:
gT(f,k+1)←gT(f,k)*gPM(f) and
φT(f,k+1)←φT(f,k)+φPM(f).
11. Calculate the image rejection IR(f) from the post-modulation gain imbalance gPM(f) and post-modulation phase skew φPM(f) based on equation (4.15) - Endfor
k←k+1 - Calculate quality measure Q=maximum of −IR(f) over all values of f. (A more negative value of IR(f) corresponds to higher quality. Thus, the negative of IR(f) corresponds to quality at frequency f. Q is the maximum of quality over the frequency band.)
End While
- Do while (quality measure Q is smaller than threshold)
LO RX −LO TX =ΔLO.
The selected value is a non-zero fraction (e.g., a small fraction) of the instantaneous bandwidth of the transmitter. The two local oscillators are phase locked.
2. Connect the transmitter's output to the receiver's input.
3. Estimate the DC scaling m(0) and DC rotation θ(0) of the signal path between transmitter's I/Q modulator and the receiver's I/Q demodulator using the algorithm in the section “Calculating the Mapping Between and RX and TX”. This estimation involves the following steps.
3A. Apply a zero stimulus signal as input to the transmitter's I/Q modulator.
3B. Capture the response signal zA(n) at the output of the receiver's I/Q demodulator.
3C. Frequency shift the response signal zA(n) by amount ΔLO to obtain a frequency-shifted signal FSzA(n).
3D. Apply a DC test vector as input to the I/Q modulator.
3E. Capture the response signal zC(n) at the output of the I/Q demodulator.
3F. Frequency shift the response signal zB(n) by amount ΔLO to obtain a frequency-shifted signal FSzB(n).
3G. Compute the DC scaling m(0) and the DC rotation θ(0) based on the frequency shifted signal FSzA(n), the frequency shifted signal FSzB(n) and the DC test vector as described in the section “Calculating the Mapping between the RX and TX”.
For the best results, apply a tone K to the transmitter's I/Q modulator in addition to the DC test vector. The tone K is applied because the leakage can be sensitive to in-band power. The tone K is applied at some frequency in the instantaneous bandwidth other than DC.
Note: The frequency-shifting operations may be performed using a signal FS(n) whose phase is continuous in time and runs at rate ΔLO. For example, FS(n) may have the form:
FS(n)=exp{j2π(ΔLO/ADC_SampleRate)n}.
The frequency shift operation may be implemented according to the relation:
FSz(n)=z(n)FS(n),
where z(n) is a signal to be frequency shifted.
FS(m)=exp{j2π(ΔLO/ADC_SampleRate)m}.
Let k be defined by the sample distance between the current acquisition and the first acquisition for the first sample z(0). Then
FS(m)=FS(k+n)=exp{j2π(ΔLO/ADC_SampleRate)(k+n)}.
Now FSz(n) can computed from the expression
FSz(n)=FS(k+n)z(n)=FS(n)z(n)FSOffset,
where
FS(n)=exp{j2π(ΔLO/ADC_SampleRate)n}
FSOffset=FS(k)=exp{j2π(ΔLO/ADC_SampleRate)k}.
Note that k will only change from one acquisition to the next.
For each positive tone frequency offset f=Δf to NΔf step Δf, subject to restrictions described in the “Restrictions” section.
-
- k←0
- For S element of {1,−1}
- Do while (−Image_Rejection for tone frequency offset v=S*f is smaller than threshold):
4. Compute α and β coefficients for pre-correction circuitry based at least on the best available estimate for transmitter impairments at frequency v, as follows:
- Do while (−Image_Rejection for tone frequency offset v=S*f is smaller than threshold):
| If f = Δf |
| If k=0 |
| if S=1: |
| Set gT(v,0)←and φT(v,0)←0. |
| Set pre-correction coefficients α and β to implement the |
| identity map (i.e., straight pass-through): α←0 and β←1. |
| if S=−1: |
| gT(v,0)← gT(−v,∞). |
| φT(v,0)← φT(−v,∞). |
| In general, the notation gT(x,∞) and φT(x,∞) represent |
| respectively the converged estimates of gT and φT resulting |
| from the final kiteration at previously-visited frequency x. |
| Compute α and β for a traditional single-point compensation |
| basedon gT(v,0) and φT(v,0). |
| Else k>0 |
| if S=1: Compute α and β for a traditional single-point |
| compensationbased on gT(v,k) and φT(v,k). |
| if S=−1: Compute α and β for true single-point correction based on |
| gT(v,k) and φT(v, k), gT(−v,∞) and φT(−v,∞). |
| End If |
| Else (f > Δf) |
| If k=0 |
| gT(v,0)← gT(v−S*Δf, ∞) |
| φT(v,0)← φT(v−S*Δf, ∞) |
| Compute α and β for true single-point correction based on the best |
| available estimate of the transmitter impairments at v and −v, e.g., |
| as follows. |
| if S=1: compute α and β for true single-point correction based on |
| gT(v−Δf, ∞), φT(v−Δf, ∞), gT(−v+Δf, ∞), φT(−v+Δf, ∞) |
| if S=−1: compute α and β for true single-point correction based on |
| gT(v+Δf, ∞), φT(v+Δf, ∞), gT(−v, ∞), φT(−v, ∞) |
| Else k>0 |
| if S=1, compute α and β for true single-point correction based on |
| gT(v, k), φT(v, k), gT(−v+Δf, ∞), φT(−v+Δf, ∞) |
| if S=−1, compute α and β for true single-point correction based on |
| gT(v, k), φT(v, k), gT(−v,∞), φT(−v, ∞) |
| End If |
5. Configure the pre-correction circuitry to use the computed values α and β.
6. Apply a complex exponential signal u(n)=exp(j2πvn) to the inputs of the pre-correction circuitry.
7A. Measure complex baseband signal z(n) at the output of the receiver's I/Q demodulator.
7B. This step is optional.
-
- Remove the receiver's I/Q impairments from the complex baseband signal z(n) to obtain a modified complex signal. For example, this removal may involve filtering the complex baseband signal with a 2×2 matrix of digital filters, or, multiplying the complex baseband signal by a 2×2 constant matrix, as described above in the section “Determination of Transmitter I/Q Impairments with Offset LOs”.
7C. Apply a frequency shift equal to ΔLO that is phase continuous (as described above) to the signal z(n) in order to obtain frequency-shifted signal FSz(n). If step 7B has been performed, the frequency shift is applied to the modified complex signal.
8. Determine raw gain imbalance gFSz(v) and raw phase skew φFSz(v) at frequency v based on the complex baseband signal FSz(n) using the calculation method described in the “Precise Measurement Technique” section.
9. Remove the best current estimate of the signal path (between the transmitter's I/Q modulator and the receiver's I/Q demodulator) from the raw gain imbalance gFSz(v) and the raw phase skew φFSz(v) to obtain estimated post-modulation gain imbalance gPM(v) and post-modulation phase skew φPM(v). m(0) and θ(0) will provide a basic estimate of the signal path. Better estimates will increase the rate of convergence. For example,step 9 may be implemented as follows. - If f=Δf
- Remove the estimated DC scaling m(0) and DC rotation θ(0) from the raw gain imbalance gFSz(v) and the raw phase skew φFSz(v) to obtain the estimated post-modulation gain imbalance gPM(v) and post-modulation phase skew φPM(v) using the transform described in “Altering the Gain Imbalance and Phase Skew through a Linear System”, with
H(v)=exp(−jθ(0))/m(0) and H(−v)=exp(−jθ(0))/m(0).
- Remove the estimated DC scaling m(0) and DC rotation θ(0) from the raw gain imbalance gFSz(v) and the raw phase skew φFSz(v) to obtain the estimated post-modulation gain imbalance gPM(v) and post-modulation phase skew φPM(v) using the transform described in “Altering the Gain Imbalance and Phase Skew through a Linear System”, with
- Else f>Δf
- Compute scaling m(v) at tone frequency v based on the signal FSz(n) of step 7C. The scaling m(v) may be determined by computing the magnitude of the frequency component at frequency v in the complex signal FSz(n), as explained in the “Precise Measurement Technique” section, especially in equation 6.6.
- (Note: In an alternative embodiment, the measurement of z(n) is synchronized with the generation of the tone u(n), e.g., by using a trigger signal that is shared between the transmitter and receiver, e.g., a trigger generated by a controller device. In this case, rotation θ(v) may be measured in addition to scaling m(v).)
- Remove the estimated linear signal path from the raw gain imbalance gFSz(v) and the raw phase skew φFSz(v) to obtain the estimated post-modulation gain imbalance gPM(v) and post-modulation phase skew φPM(v) by using the transform described in “Altering the Gain Imbalance and Phase Skew through a Linear System” with H(v)=exp(−jθ(0))/m(v) and H(−v)=exp(−jθ(0))/mBAE(−v), where mBAE(−v) is the best available estimate for scaling m(−v).
- If S=1: mBAE(−v)=m(−v+Δf, ∞)
- If S=−1: mBAE(−v)=m(−v,∞).
- In general, the notation m(x,∞) denotes the scaling m(x) computed in the final k iteration of previously-visited frequency x.
10. Generate update for transmitter gain imbalance gT and transmitter phase skew φT according to:
gT(v,k+1)←gT(v,k)*gPM(v) and
φT(v,k+1)←φT(v,k)+φPM(v).
11. Calculate the image rejection IR(v) from the post-modulation gain imbalance gPM(v) and post-modulation phase skew φPM(v) based on equation 4.15
- Remove the receiver's I/Q impairments from the complex baseband signal z(n) to obtain a modified complex signal. For example, this removal may involve filtering the complex baseband signal with a 2×2 matrix of digital filters, or, multiplying the complex baseband signal by a 2×2 constant matrix, as described above in the section “Determination of Transmitter I/Q Impairments with Offset LOs”.
| k ← k+1 | ||
| EndDo | ||
| EndFor S element of {1,−1} | ||
| Endfor | ||
2. Configure the receiver and transmitter so that they use the same LO frequency fLO. If the receiver and transmitter use two different LO circuits, tune the transmitter so that its LO is phase locked to the same reference. Therefore, the frequency of the transmitter and the frequency of the receiver are both fLO.
3. Connect the transmitter's output to the receiver's input.
4. Estimate the DC scaling m(0) and DC rotation θ(0) of the signal path between transmitter's I/Q modulator and the receiver's I/Q demodulator by using the algorithm in the section “Calculating the Mapping Between and RX and TX”. For the best results, apply a tone K to the transmitter's I/Q modulator in addition to the DC test vector.
For each positive frequency offset f=Δf to NΔf step Δf.
| For S element of {1,−1} |
| k ← 0 |
| Do while ( −Image_Rejection for frequency offset v=S*f is smaller |
| than threshold): 5A. Compute α and β coefficients for |
| pre-correction circuitry based at least on the best available estimate |
| for transmitter impairments at frequency v. |
| If f = Δf |
| If k=0 |
| if S=1: |
| Set gT(v,0)←1 and φT(v,0)←0, and set |
| pre-correction coefficients α and β to implement |
| the identity map (i.e., straight pass-through): α←0 |
| and β←1. |
| if S=−1: |
| Set gT(v,0)← gT(−v,∞), φT(v,0)← φT(−v,∞), and |
| compute α and βfor a traditional single-point |
| compensation based on gT(v,0) and φT(v,0). |
| Else k>0 |
| if S=1: Compute α and β for a traditional single-point |
| compensation based on gT(v,k) and φT(v,k) |
| if S=−1: Compute α and β for true single-point |
| compensation based on gT(v,k) and φT(v, k), gT(−v,∞) |
| and φT(−v,∞) |
| End If |
| Else (f > Δf) |
| If k=0 |
| gT(v,0)← gT(v−S*Δf, ∞) and φT(v,0)← |
| 0 φT(v−S*Δf, ∞) |
| Compute α and β for true single-point correction based |
| on the best available estimate of the transmitter |
| impairments at v and −v, e.g., as follows. |
| if S=1: |
| compute α and β for true single-point correction |
| based on gT(v−Δf, ∞), φT(v−Δf, ∞), gT(−v+Δf, |
| ∞), φT(−v+Δf, ∞) |
| if S=−1: |
| compute α and β for true single-point correction |
| based on gT(v+Δf, ∞), φT(v+Δf, ∞), gT(−v, ∞), |
| φT(−v, ∞) |
| Else k>0 |
| if S=1: |
| compute α and β for true single-point correction |
| based on gT(v, k), φT(v, k), gT(−v+Δf, ∞), |
| φT(−v+Δf, ∞) |
| if S=−1: |
| compute α and β for true single-point correction |
| based on gT(v, k), φT(v, k), gT(−v,∞), φT(−v, ∞) |
| End If |
| End If |
5B. Configure the pre-correction circuitry to use the computed values α and β.
6. Apply a complex exponential signal u(n)=exp(j2πvn) to the inputs of the pre-correction circuitry.
7A. Measure complex baseband signal z(n) at the output of the receiver's I/Q demodulator.
7B. Determine raw gain imbalance gz(v) and raw phase skew φz(v) based on the complex baseband signal z(n) using the calculation method in the section “Precise Measurement Technique”.
8. Remove the receiver's gain imbalance gR(v) and phase skew φR(v) from the raw gain imbalance gz(v) and raw phase skew φz(v) to obtain pre-demodulation gain imbalance gPD(v) and pre-demodulation phase skew φPD(v). There are a number of ways to accomplish this removal, including a mathematical transformation method and a filtering method, as described above in connection with
9. Remove the best current estimate of the signal path between the transmitter's I/Q modulator and the receiver's I/Q demodulator. m(0) and θ(0) will provide a basic estimate. Better estimates will increase the rate of convergence. For example,
If f=Δf:
-
- Remove the estimated DC scaling m(0) and DC rotation θ(0) from the gain imbalance gPD(v) and the phase skew φPD(v) to obtain the estimated post-modulation gain imbalance gPM(v) and post-modulation phase skew φPM(v) using the transform described in “Altering the Gain Imbalance and Phase Skew through a Linear System” with H(v) and H(−v) set equal to
exp(−jθ(0))/m(0).
Else f>Δf - Compute scaling m(v) at tone frequency v based on the complex baseband signal z(n) of step 7A. The scaling m(v) may be determined by computing the magnitude of the frequency component at frequency v in the complex signal z(n), as explained in the “Precise Measurement Technique” section, especially in equation 6.6.
- (Note: In an alternative embodiment, the measurement of z(n) is synchronized with the generation of the tone u(n), e.g., by using a trigger signal that is shared between the transmitter and receiver, e.g., a trigger generated by a controller device. In this case, rotation θ(v) may be measured in addition to scaling m(v).)
- Remove the estimated linear signal path from the gain imbalance gPD(v) and the phase skew φPD(v) to obtain the estimated post-modulation gain imbalance gPM(v) and post-modulation phase skew φPM(v) by using the transform described in “Altering the Gain Imbalance and Phase Skew through a Linear System” with H(v)=exp(−jθ(0))/m(v) and
- H(−v)=exp(−jθ(0))/mBAE(−v), where mBAE(−v) is the best available estimate for scaling m(−v).
- If S=1: mBAE(−v)=m(−v+Δf, ∞)
- If S=−1: mBAE(−v)=m(−v,∞).
- In general, the notation m(x,∞) denotes the scaling m(x) computed in the final k iteration at previously-visited frequency x.
10. Generate update for transmitter gain imbalance gT and transmitter phase skew φT according to:
gT(v,k+1)←gT(v,k)*gPM(v) and
φT(v,k+1)←φT(v,k)+φPM(v).
11. Calculate the image rejection IR(v) from the post-modulation gain imbalance gPM(v) and post-modulation phase skew φPM(v) based on equation 4.15
- Remove the estimated DC scaling m(0) and DC rotation θ(0) from the gain imbalance gPD(v) and the phase skew φPD(v) to obtain the estimated post-modulation gain imbalance gPM(v) and post-modulation phase skew φPM(v) using the transform described in “Altering the Gain Imbalance and Phase Skew through a Linear System” with H(v) and H(−v) set equal to
| k ← k+1 | ||
| EndDo | ||
| EndFor S element of {1,−1} | ||
| Endfor | ||
Claims (20)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US13/887,186 US8654828B2 (en) | 2012-02-24 | 2013-05-03 | Mechanism for the measurement of DC properties of a signal path |
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US13/404,896 US8442150B1 (en) | 2012-02-24 | 2012-02-24 | Measurement of transmitter impairments using offset local oscillators |
| US13/442,523 US8437385B1 (en) | 2012-02-24 | 2012-04-09 | Measuring the DC properties of a signal path between transmitter and receiver |
| US13/887,186 US8654828B2 (en) | 2012-02-24 | 2013-05-03 | Mechanism for the measurement of DC properties of a signal path |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US13/442,523 Continuation US8437385B1 (en) | 2012-02-24 | 2012-04-09 | Measuring the DC properties of a signal path between transmitter and receiver |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| US20130243061A1 US20130243061A1 (en) | 2013-09-19 |
| US8654828B2 true US8654828B2 (en) | 2014-02-18 |
Family
ID=48183287
Family Applications (14)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US13/404,896 Active US8442150B1 (en) | 2012-02-24 | 2012-02-24 | Measurement of transmitter impairments using offset local oscillators |
| US13/442,456 Active US8446937B1 (en) | 2012-02-24 | 2012-04-09 | Technique for the measurement of I/Q impairments associated with a sampled complex signal |
| US13/442,573 Active 2032-07-02 US8681842B2 (en) | 2012-02-24 | 2012-04-09 | Transforming I/Q impairments through a linear system |
| US13/442,367 Active 2032-04-07 US8559560B2 (en) | 2012-02-24 | 2012-04-09 | Measuring the I/Q impairments of a receiver |
| US13/442,082 Active US8462882B1 (en) | 2012-02-24 | 2012-04-09 | Measurement of transmitter I/Q impairments using shared local oscillators |
| US13/442,523 Active US8437385B1 (en) | 2012-02-24 | 2012-04-09 | Measuring the DC properties of a signal path between transmitter and receiver |
| US13/887,153 Active US8681846B2 (en) | 2012-02-24 | 2013-05-03 | Measurement of I/Q impairments from a sampled complex signal |
| US13/886,986 Active US8699552B2 (en) | 2012-02-24 | 2013-05-03 | Mechanism for measuring transmitter impairments using offset local oscillators |
| US13/887,059 Active US8774259B2 (en) | 2012-02-24 | 2013-05-03 | Mechanism for measuring transmitter I/Q impairments using shared local oscillators |
| US13/887,109 Active US8681845B2 (en) | 2012-02-24 | 2013-05-03 | Mechanisms for measuring the I/Q impairments of a receiver |
| US13/887,186 Active US8654828B2 (en) | 2012-02-24 | 2013-05-03 | Mechanism for the measurement of DC properties of a signal path |
| US14/172,992 Active US8897349B2 (en) | 2012-02-24 | 2014-02-05 | Determining transmitter impairments using offset local oscillators |
| US14/198,407 Active US8938025B2 (en) | 2012-02-24 | 2014-03-05 | Correction of I/Q impairments in transmitters and receivers |
| US14/220,364 Active US8861579B2 (en) | 2012-02-24 | 2014-03-20 | Measuring I/Q impairments from sampled complex signals |
Family Applications Before (10)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US13/404,896 Active US8442150B1 (en) | 2012-02-24 | 2012-02-24 | Measurement of transmitter impairments using offset local oscillators |
| US13/442,456 Active US8446937B1 (en) | 2012-02-24 | 2012-04-09 | Technique for the measurement of I/Q impairments associated with a sampled complex signal |
| US13/442,573 Active 2032-07-02 US8681842B2 (en) | 2012-02-24 | 2012-04-09 | Transforming I/Q impairments through a linear system |
| US13/442,367 Active 2032-04-07 US8559560B2 (en) | 2012-02-24 | 2012-04-09 | Measuring the I/Q impairments of a receiver |
| US13/442,082 Active US8462882B1 (en) | 2012-02-24 | 2012-04-09 | Measurement of transmitter I/Q impairments using shared local oscillators |
| US13/442,523 Active US8437385B1 (en) | 2012-02-24 | 2012-04-09 | Measuring the DC properties of a signal path between transmitter and receiver |
| US13/887,153 Active US8681846B2 (en) | 2012-02-24 | 2013-05-03 | Measurement of I/Q impairments from a sampled complex signal |
| US13/886,986 Active US8699552B2 (en) | 2012-02-24 | 2013-05-03 | Mechanism for measuring transmitter impairments using offset local oscillators |
| US13/887,059 Active US8774259B2 (en) | 2012-02-24 | 2013-05-03 | Mechanism for measuring transmitter I/Q impairments using shared local oscillators |
| US13/887,109 Active US8681845B2 (en) | 2012-02-24 | 2013-05-03 | Mechanisms for measuring the I/Q impairments of a receiver |
Family Applications After (3)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| US14/172,992 Active US8897349B2 (en) | 2012-02-24 | 2014-02-05 | Determining transmitter impairments using offset local oscillators |
| US14/198,407 Active US8938025B2 (en) | 2012-02-24 | 2014-03-05 | Correction of I/Q impairments in transmitters and receivers |
| US14/220,364 Active US8861579B2 (en) | 2012-02-24 | 2014-03-20 | Measuring I/Q impairments from sampled complex signals |
Country Status (1)
| Country | Link |
|---|---|
| US (14) | US8442150B1 (en) |
Families Citing this family (25)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| JP5213982B2 (en) * | 2011-03-30 | 2013-06-19 | アンリツ株式会社 | Mobile communication terminal test system, analysis method, and analysis program |
| US9020019B2 (en) * | 2012-02-24 | 2015-04-28 | National Instruments Corporation | Computing I/Q impairments at system output based on I/Q impairments at system input |
| US8442150B1 (en) * | 2012-02-24 | 2013-05-14 | National Instruments Corporation | Measurement of transmitter impairments using offset local oscillators |
| US8873608B2 (en) * | 2012-11-21 | 2014-10-28 | Tektronix, Inc. | Measurement of IQ imbalance in a vector modulator |
| US8660170B1 (en) * | 2012-12-09 | 2014-02-25 | Phuong Thu-Minh Huynh | Apparatus and method for calibrating the I/Q mismatch in a quadrature bandpass sampling receiver |
| US9130626B2 (en) | 2013-04-10 | 2015-09-08 | Qualcomm Incorporated | Frequency dependent I/Q impairment compensation |
| US9136989B2 (en) | 2013-10-10 | 2015-09-15 | Motorola Solutions, Inc. | Method and apparatus for reducing carrier leakage |
| US9363026B2 (en) * | 2013-10-11 | 2016-06-07 | Dell Products L.P. | Systems and methods for measurement of electrical channel loss |
| US9264281B2 (en) * | 2013-10-31 | 2016-02-16 | Mstar Semiconductor, Inc. | Wireless communication receiver with I/Q imbalance estimation and correction techniques |
| US9609653B2 (en) | 2014-10-15 | 2017-03-28 | National Instruments Corporation | Spectral stitching method to increase instantaneous bandwidth in vector signal generators |
| US9326174B1 (en) * | 2014-10-15 | 2016-04-26 | National Instruments Corporation | Spectral stitching method to increase instantaneous bandwidth in vector signal analyzers |
| US9559434B2 (en) * | 2014-12-12 | 2017-01-31 | Intel Corporation | Method for closed-loop tuner in a receiver antenna |
| US9374262B1 (en) * | 2014-12-18 | 2016-06-21 | Viasat, Inc. | Techniques for linearizing phase separately from amplitude in a communications system |
| US9628202B2 (en) | 2015-02-27 | 2017-04-18 | Rohde & Schwarz Gmbh & Co. Kg | Testing front end modules, testing methods and modular testing systems for testing electronic equipment |
| US10102092B2 (en) * | 2015-03-02 | 2018-10-16 | Rohde & Schwarz Gmbh & Co. Kg | Testing front end module, testing methods and modular testing systems for testing electronic equipment |
| US9774364B2 (en) * | 2015-09-04 | 2017-09-26 | Futurewei Technologies, Inc. | Interference phase estimate system and method |
| US10003453B1 (en) | 2015-11-13 | 2018-06-19 | Anritsu Company | Phase synchronization of measuring instruments using free space transmission |
| US9860054B1 (en) * | 2015-11-13 | 2018-01-02 | Anritsu Company | Real-time phase synchronization of a remote receiver with a measurement instrument |
| TWI615619B (en) * | 2016-06-24 | 2018-02-21 | 致伸科技股份有限公司 | Method for communicating with testing body and system using the same |
| US11133809B2 (en) * | 2017-09-28 | 2021-09-28 | Intel Corporation | Method and circuit for determining phase continuity of a local oscillator signal, and local oscillator signal generation circuit |
| EP3588102B1 (en) * | 2018-06-29 | 2022-01-05 | VIAVI Solutions, Inc. | Test instruments and methods for compensating iq imbalance |
| EP3754360A1 (en) * | 2019-06-21 | 2020-12-23 | NXP USA, Inc. | Built in self test transmitter phase calibration |
| US12166571B2 (en) * | 2019-08-01 | 2024-12-10 | Ismail ERTÜRK | Robust code / data hiding method against analog transmission (over the air) for digital audio |
| US12047222B2 (en) * | 2021-07-05 | 2024-07-23 | Mediatek Inc. | AI-assisted communication circuit optimization |
| CN117269736B (en) * | 2023-11-22 | 2024-05-24 | 厦门科塔电子有限公司 | FT test system and method for low-noise amplifier chip |
Citations (29)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20020018531A1 (en) | 1999-03-26 | 2002-02-14 | Mika Ratto | Correction of DC-offset of I/Q modulator |
| US20030206603A1 (en) | 2002-05-03 | 2003-11-06 | Husted Paul J. | Systems and methods to provide wideband magnitude and phase imbalance calibration and compensation in quadrature receivers |
| US20040156450A1 (en) | 2001-06-29 | 2004-08-12 | Tommi Auranen | Iq-imbalance |
| US20040203472A1 (en) | 2002-09-05 | 2004-10-14 | G-Plus, Inc. | Compensation of I-Q imbalance in digital transceivers |
| US20050025255A1 (en) | 2000-09-13 | 2005-02-03 | Amir Francos | DC offset cancellation |
| US20060094377A1 (en) * | 2004-10-29 | 2006-05-04 | Meng-An Pan | Method and system for output common mode control for reducing DC offset for an IF mixer that downconverts a received signal to DC without introducing additional offset |
| US7151917B2 (en) | 2003-09-29 | 2006-12-19 | Silicon Laboratories, Inc. | Apparatus and method for deriving a digital image correction factor in a receiver |
| US7203466B2 (en) | 2001-03-26 | 2007-04-10 | Infineon Technologies Ag | Transmitting and receiving unit |
| US20080232498A1 (en) | 2007-03-22 | 2008-09-25 | Chandra Gupta | Radio receiver or transmitter and method for reducing an iq gain imbalance |
| US20090036079A1 (en) | 2007-08-02 | 2009-02-05 | Bengt Lindoff | IQ Imbalance Image Suppression in Presence of Unknown Phase Shift |
| US7706475B1 (en) | 2005-04-15 | 2010-04-27 | Marvell International Ltd. | Compensation of I/Q mismatch in a communication system using I/Q modulation |
| US20100215125A1 (en) | 2009-02-25 | 2010-08-26 | Harris Corporation | Communications device with in-phase/quadrature (i/q) dc offset, gain and phase imbalance compensation and related method |
| US20100232493A1 (en) | 2009-03-12 | 2010-09-16 | Freescale Semiconductor, Inc. | Radio transmitter iq imbalance measurement and correction methods and apparatus |
| US7822147B2 (en) | 2006-02-07 | 2010-10-26 | Her Majesty The Queen In Right Of Canada As Represented By The Minister Of Industry, Through The Communications Research Centre Canada | Self-calibrating multi-port circuit and method |
| US20100272208A1 (en) | 2007-12-18 | 2010-10-28 | Jeffrey Ross Feigin | Imbalance compensation for direct conversion communication systems |
| US7831220B2 (en) | 2005-07-26 | 2010-11-09 | Broadcom Corporation | Methods and systems for calibrating for gain and phase imbalance and local oscillator feed-through |
| US7839314B2 (en) | 2006-02-15 | 2010-11-23 | University Of Westminster | Satellite radio navigation receiver |
| US7856065B2 (en) | 2007-05-02 | 2010-12-21 | Telefonkaktiebolaget Lm Ericsson (publ) | Method and apparatus for correcting IQ imbalance in an OFDM receiver |
| US7869538B2 (en) | 2002-04-04 | 2011-01-11 | Nortel Networks Limited | System and method for I/Q imbalance compensation |
| US7881402B2 (en) | 2006-09-07 | 2011-02-01 | Via Technologies, Inc. | Compensation for gain imbalance, phase imbalance and DC offsets in a transmitter |
| US7885351B2 (en) | 2006-08-28 | 2011-02-08 | Alcatel Lucent | Method of correcting gain and phase imbalance of a multi-carrier transmission signal, transmitter and base station |
| US20110069767A1 (en) | 2009-09-23 | 2011-03-24 | Jie Zhu | Methods and systems to compensate iq imbalance in zero-if tuners |
| US7925217B2 (en) | 2006-02-23 | 2011-04-12 | GCT Research, Inc. | Receiving circuit and method for compensating IQ mismatch |
| US7962113B2 (en) | 2005-10-31 | 2011-06-14 | Silicon Laboratories Inc. | Receiver with multi-tone wideband I/Q mismatch calibration and method therefor |
| US7974593B2 (en) | 2006-06-23 | 2011-07-05 | Sierra Monolithics, Inc. | Apparatus and method for calibration of gain and/or phase imbalance and/or DC offset in a communication system |
| US8010076B2 (en) | 2003-02-07 | 2011-08-30 | Broadcom Corporation | Method and system for correcting receiver mixer IQ mismatch |
| US8018990B2 (en) | 2007-02-08 | 2011-09-13 | Gct Semiconductor, Inc. | Apparatus for measuring in-phase and quadrature (IQ) imbalance |
| US8027376B2 (en) | 2003-02-07 | 2011-09-27 | Broadcom Corporation | Method and system for measuring IQ path mismatch |
| US8437385B1 (en) * | 2012-02-24 | 2013-05-07 | National Instruments Corporation | Measuring the DC properties of a signal path between transmitter and receiver |
Family Cites Families (12)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6940916B1 (en) * | 2000-01-27 | 2005-09-06 | Pmc-Sierra, Inc. | Wideband analog quadrature modulator/demodulator with pre-compensation/post-compensation correction |
| ATE342613T1 (en) | 2000-05-09 | 2006-11-15 | Cit Alcatel | METHOD FOR CONTROLLING THE TRANSMITTER IN A RADIO TRANSMITTER AND THE CORRESPONDING RADIO TRANSMITTER |
| US7305024B2 (en) | 2003-08-29 | 2007-12-04 | Texas Instruments Incorporated | Method of fixing frequency complex up-conversion phase and gain impairments |
| JP4381945B2 (en) * | 2004-09-30 | 2009-12-09 | 株式会社ルネサステクノロジ | Receiver, receiving method, and portable wireless terminal |
| US20080084951A1 (en) | 2006-10-06 | 2008-04-10 | Helen Chen | Systems and methods for receiving multiple input, multiple output signals for test and analysis of multiple-input, multiple-output systems |
| EP2127067A1 (en) * | 2007-01-22 | 2009-12-02 | Freescale Semiconductor, Inc. | Calibration signal generator |
| JP5219537B2 (en) * | 2008-02-08 | 2013-06-26 | 株式会社アドバンテスト | Gain imbalance measuring device, phase difference corresponding value measuring device, method, program, and recording medium |
| JP5287521B2 (en) * | 2009-06-04 | 2013-09-11 | 株式会社リコー | Communication device |
| US8238458B2 (en) | 2009-11-02 | 2012-08-07 | National Instruments Corporation | IQ impairment estimation in an OFDM signal |
| US9203682B2 (en) * | 2010-09-07 | 2015-12-01 | Alcatel Lucent | Frequency-dependent I/Q-signal imbalance correction coherent optical transceivers |
| US8503576B2 (en) * | 2011-04-25 | 2013-08-06 | SiTune Corporation | Mirror signal IQ-imbalance correction |
| US8638893B2 (en) * | 2012-02-24 | 2014-01-28 | National Instruments Corporation | Mechanisms for the correction of I/Q impairments |
-
2012
- 2012-02-24 US US13/404,896 patent/US8442150B1/en active Active
- 2012-04-09 US US13/442,456 patent/US8446937B1/en active Active
- 2012-04-09 US US13/442,573 patent/US8681842B2/en active Active
- 2012-04-09 US US13/442,367 patent/US8559560B2/en active Active
- 2012-04-09 US US13/442,082 patent/US8462882B1/en active Active
- 2012-04-09 US US13/442,523 patent/US8437385B1/en active Active
-
2013
- 2013-05-03 US US13/887,153 patent/US8681846B2/en active Active
- 2013-05-03 US US13/886,986 patent/US8699552B2/en active Active
- 2013-05-03 US US13/887,059 patent/US8774259B2/en active Active
- 2013-05-03 US US13/887,109 patent/US8681845B2/en active Active
- 2013-05-03 US US13/887,186 patent/US8654828B2/en active Active
-
2014
- 2014-02-05 US US14/172,992 patent/US8897349B2/en active Active
- 2014-03-05 US US14/198,407 patent/US8938025B2/en active Active
- 2014-03-20 US US14/220,364 patent/US8861579B2/en active Active
Patent Citations (32)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US20020018531A1 (en) | 1999-03-26 | 2002-02-14 | Mika Ratto | Correction of DC-offset of I/Q modulator |
| US20050025255A1 (en) | 2000-09-13 | 2005-02-03 | Amir Francos | DC offset cancellation |
| US7203466B2 (en) | 2001-03-26 | 2007-04-10 | Infineon Technologies Ag | Transmitting and receiving unit |
| US20080212711A1 (en) | 2001-06-29 | 2008-09-04 | Nokia Corporation | IQ-Imbalance |
| US20040156450A1 (en) | 2001-06-29 | 2004-08-12 | Tommi Auranen | Iq-imbalance |
| US7869538B2 (en) | 2002-04-04 | 2011-01-11 | Nortel Networks Limited | System and method for I/Q imbalance compensation |
| US20030206603A1 (en) | 2002-05-03 | 2003-11-06 | Husted Paul J. | Systems and methods to provide wideband magnitude and phase imbalance calibration and compensation in quadrature receivers |
| US20070058755A1 (en) | 2002-05-03 | 2007-03-15 | Husted Paul J | Systems And Methods To Provide Wideband Magnitude And Phase Imbalance Calibration And Compensation In Quadrature Receivers |
| US20040203472A1 (en) | 2002-09-05 | 2004-10-14 | G-Plus, Inc. | Compensation of I-Q imbalance in digital transceivers |
| US20070275674A1 (en) | 2002-09-05 | 2007-11-29 | Silicon Storage Technology, Inc. | Compensation of i-q imbalance in digital transceivers |
| US8010076B2 (en) | 2003-02-07 | 2011-08-30 | Broadcom Corporation | Method and system for correcting receiver mixer IQ mismatch |
| US8027376B2 (en) | 2003-02-07 | 2011-09-27 | Broadcom Corporation | Method and system for measuring IQ path mismatch |
| US7151917B2 (en) | 2003-09-29 | 2006-12-19 | Silicon Laboratories, Inc. | Apparatus and method for deriving a digital image correction factor in a receiver |
| US20060094377A1 (en) * | 2004-10-29 | 2006-05-04 | Meng-An Pan | Method and system for output common mode control for reducing DC offset for an IF mixer that downconverts a received signal to DC without introducing additional offset |
| US7706475B1 (en) | 2005-04-15 | 2010-04-27 | Marvell International Ltd. | Compensation of I/Q mismatch in a communication system using I/Q modulation |
| US7831220B2 (en) | 2005-07-26 | 2010-11-09 | Broadcom Corporation | Methods and systems for calibrating for gain and phase imbalance and local oscillator feed-through |
| US7962113B2 (en) | 2005-10-31 | 2011-06-14 | Silicon Laboratories Inc. | Receiver with multi-tone wideband I/Q mismatch calibration and method therefor |
| US7822147B2 (en) | 2006-02-07 | 2010-10-26 | Her Majesty The Queen In Right Of Canada As Represented By The Minister Of Industry, Through The Communications Research Centre Canada | Self-calibrating multi-port circuit and method |
| US7839314B2 (en) | 2006-02-15 | 2010-11-23 | University Of Westminster | Satellite radio navigation receiver |
| US7925217B2 (en) | 2006-02-23 | 2011-04-12 | GCT Research, Inc. | Receiving circuit and method for compensating IQ mismatch |
| US7974593B2 (en) | 2006-06-23 | 2011-07-05 | Sierra Monolithics, Inc. | Apparatus and method for calibration of gain and/or phase imbalance and/or DC offset in a communication system |
| US7885351B2 (en) | 2006-08-28 | 2011-02-08 | Alcatel Lucent | Method of correcting gain and phase imbalance of a multi-carrier transmission signal, transmitter and base station |
| US7881402B2 (en) | 2006-09-07 | 2011-02-01 | Via Technologies, Inc. | Compensation for gain imbalance, phase imbalance and DC offsets in a transmitter |
| US8018990B2 (en) | 2007-02-08 | 2011-09-13 | Gct Semiconductor, Inc. | Apparatus for measuring in-phase and quadrature (IQ) imbalance |
| US20080232498A1 (en) | 2007-03-22 | 2008-09-25 | Chandra Gupta | Radio receiver or transmitter and method for reducing an iq gain imbalance |
| US7856065B2 (en) | 2007-05-02 | 2010-12-21 | Telefonkaktiebolaget Lm Ericsson (publ) | Method and apparatus for correcting IQ imbalance in an OFDM receiver |
| US20090036079A1 (en) | 2007-08-02 | 2009-02-05 | Bengt Lindoff | IQ Imbalance Image Suppression in Presence of Unknown Phase Shift |
| US20100272208A1 (en) | 2007-12-18 | 2010-10-28 | Jeffrey Ross Feigin | Imbalance compensation for direct conversion communication systems |
| US20100215125A1 (en) | 2009-02-25 | 2010-08-26 | Harris Corporation | Communications device with in-phase/quadrature (i/q) dc offset, gain and phase imbalance compensation and related method |
| US20100232493A1 (en) | 2009-03-12 | 2010-09-16 | Freescale Semiconductor, Inc. | Radio transmitter iq imbalance measurement and correction methods and apparatus |
| US20110069767A1 (en) | 2009-09-23 | 2011-03-24 | Jie Zhu | Methods and systems to compensate iq imbalance in zero-if tuners |
| US8437385B1 (en) * | 2012-02-24 | 2013-05-07 | National Instruments Corporation | Measuring the DC properties of a signal path between transmitter and receiver |
Non-Patent Citations (2)
| Title |
|---|
| Cetin et al.; "Living and Dealing with RF Impairments in Communication Transceivers;" Proceedings of the IEEE International Symposium on Circuits and Systems, , Jul. 2007; pp. 21-24. |
| Cetin et al.; "Living and Dealing with RF Impairments in Communication Transceivers;" Proceedings of the IEEE International Symposium on Circuits and Systems, <http://www.wmin.ac.uk/westminsterresearch>, Jul. 2007; pp. 21-24. |
Also Published As
| Publication number | Publication date |
|---|---|
| US8699552B2 (en) | 2014-04-15 |
| US8681842B2 (en) | 2014-03-25 |
| US20130243059A1 (en) | 2013-09-19 |
| US8559560B2 (en) | 2013-10-15 |
| US20130223492A1 (en) | 2013-08-29 |
| US20130243060A1 (en) | 2013-09-19 |
| US8462882B1 (en) | 2013-06-11 |
| US20140153664A1 (en) | 2014-06-05 |
| US20130223499A1 (en) | 2013-08-29 |
| US8681845B2 (en) | 2014-03-25 |
| US8897349B2 (en) | 2014-11-25 |
| US20140247902A1 (en) | 2014-09-04 |
| US20130243061A1 (en) | 2013-09-19 |
| US8437385B1 (en) | 2013-05-07 |
| US8442150B1 (en) | 2013-05-14 |
| US8446937B1 (en) | 2013-05-21 |
| US8861579B2 (en) | 2014-10-14 |
| US20140204989A1 (en) | 2014-07-24 |
| US8681846B2 (en) | 2014-03-25 |
| US8774259B2 (en) | 2014-07-08 |
| US8938025B2 (en) | 2015-01-20 |
| US20130243057A1 (en) | 2013-09-19 |
| US20130243058A1 (en) | 2013-09-19 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US8654828B2 (en) | Mechanism for the measurement of DC properties of a signal path | |
| US8638893B2 (en) | Mechanisms for the correction of I/Q impairments | |
| US9020019B2 (en) | Computing I/Q impairments at system output based on I/Q impairments at system input | |
| US10778498B2 (en) | TX IQ mismatch pre-compensation | |
| US10924321B2 (en) | Test instruments and methods for compensating IQ imbalance | |
| US20130343490A1 (en) | Synchronizing Receivers in a Signal Acquisition System | |
| CN107579941B (en) | Mechanism for I/Q impairment correction, and transmitter impairment measurement using an offset local oscillator | |
| US9106326B2 (en) | Method for determining the imperfections of a transmit pathway and of a receive pathway of an apparatus, and associated radio apparatus | |
| US12375339B2 (en) | Frequency domain I/Q balance compensation, equalization and resampling | |
| US8238458B2 (en) | IQ impairment estimation in an OFDM signal | |
| Amir et al. | Characterization and Correction of Homodyne Systems Enabling Single-Carrier 40 Gb/s in E-Band | |
| CN104717164A (en) | Signal correction method and correction device | |
| CN105187338A (en) | Communication system calibration method and calibration device |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| AS | Assignment |
Owner name: NATIONAL INSTRUMENTS CORPORATION, TEXAS Free format text: ASSIGNMENT OF ASSIGNORS INTEREST;ASSIGNOR:DARK, STEPHEN L.;REEL/FRAME:030350/0460 Effective date: 20130501 |
|
| STCF | Information on status: patent grant |
Free format text: PATENTED CASE |
|
| FPAY | Fee payment |
Year of fee payment: 4 |
|
| AS | Assignment |
Owner name: WELLS FARGO BANK, NATIONAL ASSOCIATION, NORTH CAROLINA Free format text: SECURITY INTEREST;ASSIGNORS:NATIONAL INSTRUMENTS CORPORATION;PHASE MATRIX, INC.;REEL/FRAME:052935/0001 Effective date: 20200612 |
|
| AS | Assignment |
Owner name: WELLS FARGO BANK, NATIONAL ASSOCIATION, NORTH CAROLINA Free format text: SECURITY INTEREST;ASSIGNOR:NATIONAL INSTRUMENTS CORPORATION;REEL/FRAME:057280/0028 Effective date: 20210618 |
|
| MAFP | Maintenance fee payment |
Free format text: PAYMENT OF MAINTENANCE FEE, 8TH YEAR, LARGE ENTITY (ORIGINAL EVENT CODE: M1552); ENTITY STATUS OF PATENT OWNER: LARGE ENTITY Year of fee payment: 8 |
|
| AS | Assignment |
Owner name: NATIONAL INSTRUMENTS CORPORATION, TEXAS Free format text: RELEASE OF SECURITY INTEREST IN PATENTS (REEL/FRAME 057280/0028);ASSIGNOR:WELLS FARGO BANK, NATIONAL ASSOCIATION, AS ADMINISTRATIVE AGENT;REEL/FRAME:065231/0466 Effective date: 20231011 Owner name: PHASE MATRIX, INC., CALIFORNIA Free format text: RELEASE OF SECURITY INTEREST IN PATENTS (REEL/FRAME 052935/0001);ASSIGNOR:WELLS FARGO BANK, NATIONAL ASSOCIATION, AS ADMINISTRATIVE AGENT;REEL/FRAME:065653/0463 Effective date: 20231011 Owner name: NATIONAL INSTRUMENTS CORPORATION, TEXAS Free format text: RELEASE OF SECURITY INTEREST IN PATENTS (REEL/FRAME 052935/0001);ASSIGNOR:WELLS FARGO BANK, NATIONAL ASSOCIATION, AS ADMINISTRATIVE AGENT;REEL/FRAME:065653/0463 Effective date: 20231011 |
|
| MAFP | Maintenance fee payment |
Free format text: PAYMENT OF MAINTENANCE FEE, 12TH YEAR, LARGE ENTITY (ORIGINAL EVENT CODE: M1553); ENTITY STATUS OF PATENT OWNER: LARGE ENTITY Year of fee payment: 12 |