RU35448U1 - Интерактивный стенд отработки бортовой системы автоматической стабилизации малогабаритного беспилотного летательного аппарата вертолетного типа - Google Patents
Интерактивный стенд отработки бортовой системы автоматической стабилизации малогабаритного беспилотного летательного аппарата вертолетного типа Download PDFInfo
- Publication number
- RU35448U1 RU35448U1 RU2003130180/20U RU2003130180U RU35448U1 RU 35448 U1 RU35448 U1 RU 35448U1 RU 2003130180/20 U RU2003130180/20 U RU 2003130180/20U RU 2003130180 U RU2003130180 U RU 2003130180U RU 35448 U1 RU35448 U1 RU 35448U1
- Authority
- RU
- Russia
- Prior art keywords
- control
- control system
- receiver
- outputs
- signals
- Prior art date
Links
- 238000012360 testing method Methods 0.000 title claims description 34
- 230000006641 stabilisation Effects 0.000 title claims description 22
- 238000011105 stabilization Methods 0.000 title claims description 22
- 230000002452 interceptive effect Effects 0.000 title claims description 16
- 230000033001 locomotion Effects 0.000 claims description 18
- 238000003860 storage Methods 0.000 claims description 13
- 230000005540 biological transmission Effects 0.000 claims description 11
- 230000009471 action Effects 0.000 claims description 9
- 238000006243 chemical reaction Methods 0.000 claims description 2
- 238000000034 method Methods 0.000 description 11
- 238000004891 communication Methods 0.000 description 10
- 238000011161 development Methods 0.000 description 8
- 230000001133 acceleration Effects 0.000 description 5
- 238000002360 preparation method Methods 0.000 description 5
- 230000015572 biosynthetic process Effects 0.000 description 4
- 238000010586 diagram Methods 0.000 description 4
- 230000008569 process Effects 0.000 description 4
- 238000003786 synthesis reaction Methods 0.000 description 4
- 230000006870 function Effects 0.000 description 3
- 238000012544 monitoring process Methods 0.000 description 3
- 230000035945 sensitivity Effects 0.000 description 3
- 230000008859 change Effects 0.000 description 2
- 230000007274 generation of a signal involved in cell-cell signaling Effects 0.000 description 2
- 230000007246 mechanism Effects 0.000 description 2
- 230000008520 organization Effects 0.000 description 2
- 238000012545 processing Methods 0.000 description 2
- 239000013589 supplement Substances 0.000 description 2
- 101150034381 Slc27a5 gene Proteins 0.000 description 1
- 230000000712 assembly Effects 0.000 description 1
- 238000000429 assembly Methods 0.000 description 1
- 230000006399 behavior Effects 0.000 description 1
- 230000003542 behavioural effect Effects 0.000 description 1
- 238000004364 calculation method Methods 0.000 description 1
- 230000000536 complexating effect Effects 0.000 description 1
- 238000012937 correction Methods 0.000 description 1
- 230000006378 damage Effects 0.000 description 1
- 230000007613 environmental effect Effects 0.000 description 1
- 230000036541 health Effects 0.000 description 1
- 238000010438 heat treatment Methods 0.000 description 1
- 230000000977 initiatory effect Effects 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 230000010354 integration Effects 0.000 description 1
- 238000011835 investigation Methods 0.000 description 1
- 230000007257 malfunction Effects 0.000 description 1
- 238000004519 manufacturing process Methods 0.000 description 1
- 238000013178 mathematical model Methods 0.000 description 1
- 238000011089 mechanical engineering Methods 0.000 description 1
- 239000000047 product Substances 0.000 description 1
- 238000004088 simulation Methods 0.000 description 1
- 238000012549 training Methods 0.000 description 1
- 238000012546 transfer Methods 0.000 description 1
- 230000007704 transition Effects 0.000 description 1
- 238000010792 warming Methods 0.000 description 1
Landscapes
- Navigation (AREA)
Description
2005130180
Интерактивный стенд отработки бортовой системы автоматической стабилизации малогабаритного беспилотного летательного аппарата
вертолетного типа
Полезная модель относится к области технических средств и методики экспериментальной отработки бортовых систем стабилизации и управления движением беспилотных летательных аппаратов в режиме реального времени (РВ). что необходимо, например, при создании системы управления беспилотным летательным аппаратом на этапе натурного моделирования и натурных испытаний. Реализована, предлагаемая система в виде интерактивного стенда.
Известны системы управления беспилотными летательными аппаратами (БПЛА), обобщенная схема которых представлена, например, в 1, стр. 4.
Система управления беспилотным летательным аппаратом содержит следующие основные части, размещаемые на борту БПЛА:
-систему автопилотирования (автопилот),
радиолокационное устройство обнаружения и самонаведения или радиолокационный координатор,
-вычислительную систему (бортовую цифровую вычислительную машину (ЦВМ)),
а также наземную часть аппаратуры, представляющую из себя нульт управления, размещаемый стационарно на земле или на подвижном носителе БПЛА и осуществляющий предстартовый контроль и трансляцию полетного задания на борт БПЛА.
Командует включением и режимами работы всех подсистем бортовая ЦВМ. которая получает от внутренних и внешних источников информацию и в соответствии с реализованными в ней алгоритмами принимает решение об управлении БПЛА путем изменения или коррекции управляющих сигналов (автопилота).
Близким по технической сущности аналогом предлагаемой полезной модели, является система для прогнозирования результатов натурных испытаний беспилотного летательного аппарата 2. Система предназначена для воспроизведения и дополнения натурных испытаний беспилотных летательных аппаратов (ЛА) испытаниями на земле в условиях максимального приближения к реальным условиям эксплуатации. Для прогнозирования и дополнения результатов натурных испытаний комплексные испытательные системы оснащаются функциональными системами сбора и обработки
МПК G05B23/00
данных для принятия решений о работоспособности системы управления (СУ) ЛА. Система для прогнозирования содержит имитатор летательного аппарата, имитатор радиовысотомера, первый динамический стенд, на платформе которого установлены измерители углов, радиолокационный визир, установленный на платформе второго динамического стенда и связанный по радиоканалу с имитатором углового движения объекта наблюдения, имитатор радиосигналов, первый и второй имитаторы упругости, датчики угловых скоростей, измеритель ускорений, устройство выработки сигналов управления, имитатор пункта управления и рулевые механизмы. В имитаторе ЛА по исходным данным вырабатываются сигналы о положении ЛА и объекта наблюдения в пространстве, их относительных скоростях движения. В соответствии с получаемым сигналом дальности между ЛА и объектом наблюдения имитатор радиосигнала вырабатывает сигнал, эквивалентный отраженному от обьекта наблюдения. Этот сигнал поступает в антенну радиолокационного визира, в котором вырабатываются сигналы измеренных углов азимута и места цели объекта наблюдения, которые вместе с сигналами, получаемыми на выходах датчиков угловых скоростей, измерителей углов, линейных ускорений и имитатора радиовысотомера поступают в устройство выработки сигналов управления. В устройстве выработки сигншюв управления вырабатываются сигналы управления силовыми приводами рулевых механизмов ЛА. Происходит отклонение исполнительного элемента рулевого механизма, и сигнал, снимаемый с его выхода и пропорциональный углу закладки соответствующего руля, поступает на вход имитатора летательного аппарата, замыкая контур управления исследуемой СУ. Система останавливается оператором через расчетное заранее время, соответствующее встрече ЛА и объекта наблюдения, и фиксируется величина промаха в вертикальной и боковой плоскостях, по которым делаются выводы о качестве СУ ЛА. В этой системе-аналоге предельно упрощаются кинематические схемы имитаторов движения ЛА и относительного углового движения объекта наблюдения, исключаются ошибки имитаторов внешней среды, что позволяет достичь высокой точности воспроизведения процессов функционирования СУ ЛА и, соответственно, высокой достоверности результатов испытаний в лабораторных условиях.
Недостатком известной системы являются неполная достоверность прогнозирования вследствие ошибок, вносимых имитаторами, вследствие неполного учета воздействия ряда существенных факторов на аппаратуру исследуемой системы управления ЛА 2. Кроме того, все испытания СУ ЛА с этой системой, не смотря на большой объем статистических данных, являются лишь моделью поведения реачьного
аппарата, тогда как предлагаемый стенд обеспечивает испытания наиболее адекватные действительности, так как отработка СУ ЛА (в частности, ее системы стабилизации) производится в режиме натурных испытаний, в реальном полете.
В отличие от вышеописанной системы, предлагаемый стенд содержит не имитаторы составных частей ЛА, а сопрягается с реальным аппаратом. Поэтому он относится ближе к системам отработки систем автоматического управления (САУ) при натурных испытаниях.
В качестве прототипа (аналогичной системы, совпадающей с предлагаемой но большинству признаков) выбрана радиоуправляемая модель вертолета с ручным управлением 3, стр. 46 - 70 и гироскопом, осуществляющим автоматическую стабилизацию аппарата относительно центра масс в канале управления по курсу.
Недостатком прототипа является отсутствие возможности отработки системы стабилизации БПЛА, в частности, и всей САУ в целом в режиме реального времени.
В предлагаемом интерактивном стенде присутствуют: бортовая САУ, резервная система управления, а также наземный пульт управления, соединенный с бортовыми системами ЛА по каналу беспроводной передачи цифровых данных. Интерактивный стенд успещно апробирован в сопряжении с модернизированной (увеличенной) спортивной радиоуправляемой авиамоделью вертолета, но может быть использован и для любых других типов БПЛА. Ограничение составляет лищь тот факт, что БПЛА должен перемещаться в радиусе действия канала беспроводной передачи цифровых данных. Особенностью предлагаемого стенда является то, что для связи бортовых систем и наземного пульта управления могут использоваться стандартные открытые интерфейсы и протоколы связи, реализованные, например, на базе беспроводной сети RadioEthernet.
Технический результат в предлагаемом стенде заключается в обеспечении возможности интерактивной отработки системы стабилизации БПЛА. в частности, и всей САУ в целом, в том числе на этапе натурных испытаний.
Сущность полезной модели заключается в том, что в интерактивный стенд отработки системы стабилизации малогабаритного беспилотного летательного аппарата, содержащий устройство вычисления навигационных параметров, устройство вычисления значений управляющих воздействий, объединенные магистралью информационного обмена с запоминающим устройством, связанным по отдельным линиям с приемником спутниковой навигационной системы для получения навигационных данных, с приемо-передающим устройством беспроводной передачи
цифровых данных, с устройством сопряжения, к входам которого подключен аналогово-цифровой преобразователь и выходы приемника сигналов резервной системы управления, а к выходам устройства сопряжения подключено устройство коммутации, к входом которого также подключены выходы с первого по N-й приемника сигналов резервной системы управления, где аналогово-цифровой преобразователь служит для оцифровки сигналов, полученных по аналоговым каналам от измерительных преобразователей связанных с датчиками параметров движения, выходы управляющих сигналов с первого по N-й приемника сигналов резервной системы управления соединены с соответствующими входами устройства сопряжения, входы с первого по N-й передатчика управляющих сигналов резервной системы управления соединены с соответствующими выходами устройства вычисления значений управляющих сигналов для рулевых машин, входы которого соединены с соответствующими выходами пульта резервной системы управления, выключатель резервной системы управления соединен с передатчиком управляющих сигналов резервной системы управления и формирует сигнал управления устройством коммутации, (N+l)-й выход приемника сигналов резервной системы управления соединен с управляющим входом устройства коммутации, которое производит подключение входов усилительно-преобразовательного устройства, в зависимости от сигнала на его управляющем входе либо к выходам устройства сопряжения, либо к выходам приемника сигналов резервной системы управления, выходы усилительнопреобразовательного устройства соединены с соответствующими рулевыми машинами, устройство вычисления навигационных параметров, устройство вычисления значений управляющих воздействий, запоминающее устройство, приемник спутниковой навигационной системы, М датчиков параметров движения, М измерительных преобразователей, аналогово-цифровой преобразователь, устройство сопряжения, устройство коммутации, приемник сигналов резервной системы управления, усилительно-преобразовательное устройство, N рулевых машин составляют бортовую систему автоматического управления беспилотного летательного аппарата, введены устройства беспроводной передачи цифровых данных, при этом бортовая система автоматического управления связана по каналу беспроводной передачи цифровых данных с наземным пультом управления, который кроме задач предстартовой подготовки, имея доступ к запоминающему устройству в режиме реального времени, дает возможность производить оператору интерактивную отработку системы стабилизации.
Использование в составе стенда устройств беспроводной передачи цифровых данных, объединяющих бортовые системы ЛА и наземный пульт управления в беспроводную вычислительную сеть, дает возможность использовать методику, по которой производится наблюдение за всеми и слежение за отдельными параметрами САУ, производится подбор законов управления, параметрический синтез САУ, без остановки БПЛА, то есть при натурных испытаниях. Тогда как традиционно процесс синтеза САУ БПЛА подразумевает моделирование и ввод законов управления на этапе предстартовой подготовки. Таким образом, предлагаемый стенд дает возможность ускорить процесс синтеза САУ БПЛА.
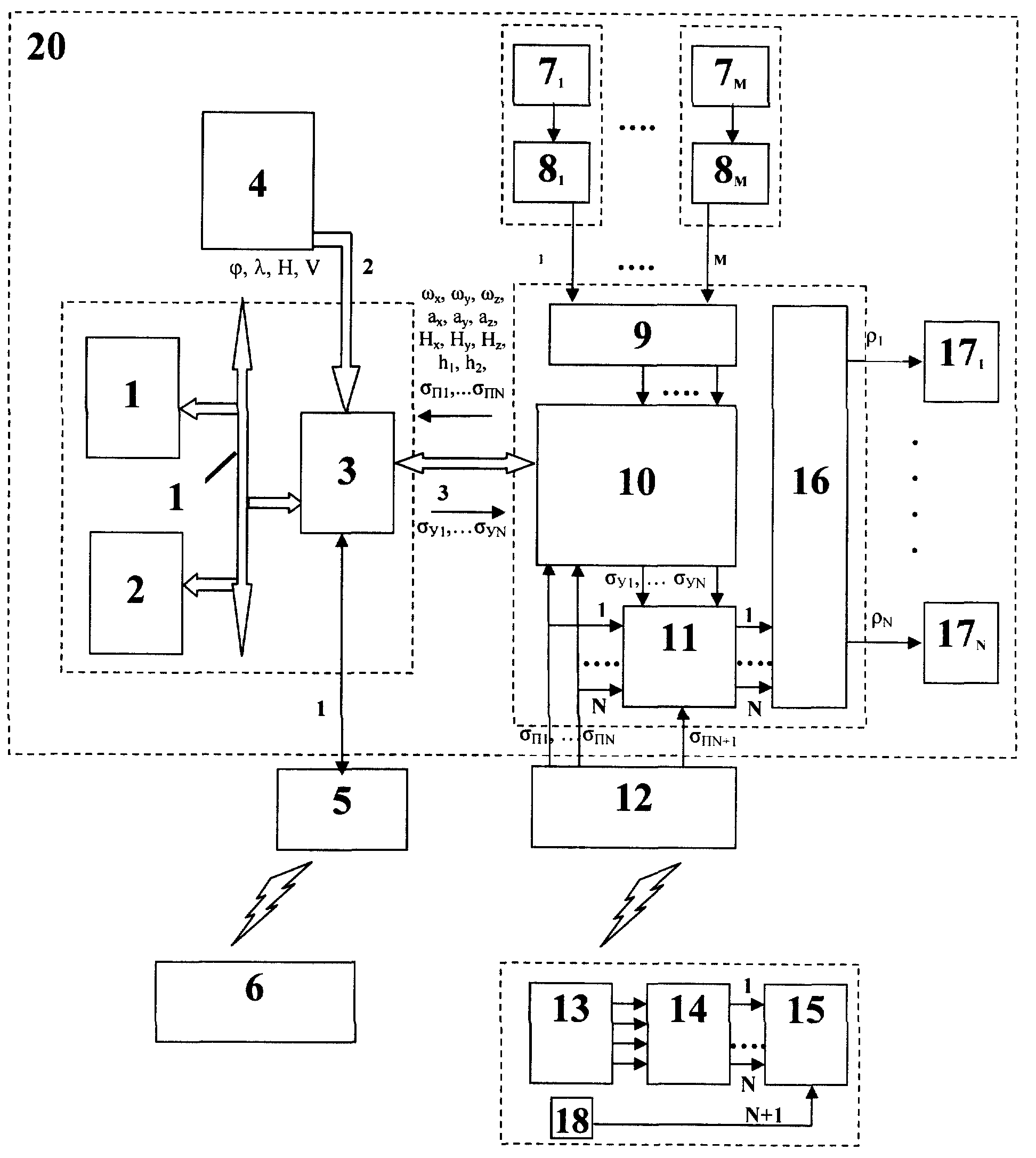
Существо предлагаемого стенда поясним при помощи его функциональной схемы, представленной на фиг. 1, где обозначены:
1.- устройство вычисления навигационных параметров,
2.- устройство вычисления значений управляющих воздействий,
3.- запоминающее устройство,
4.- приемник спутниковой навигационной системы,
5.- приемо-передающее устройство беспроводной передачи цифровых данных,
6.- наземный пульт управления, .- 1-й датчик параметров движения,
7м - М-й датчик параметров движения, 8i.- 1-й измерительный преобразователь,
8м. - М-й измерительный преобразователь,
9.- аналогово-цифровой преобразователь,
10.- устройство сопряжения,
11.- устройство коммутации,
12.- приемник сигналов резервной системы управления, 13.- пульт резервной системы управления,
14.- устройство вычисления значений управляющих сигналов для рулевых мащин.
15.- передатчик сигналов резервной системы управления,
16.- усилительно-преобразовательное устройство, 1 У - 1-я рулевая машина,
18.- выключатель резервной системы управления,
19.- магистраль информационного обмена,
20.- бортовая САУ.
Датчиками параметров движения 7/ - 7м являются датчики угловой скорости (ДУС), акселерометры, магниторезистивные датчики, но крайне мере один высотомер и другие датчики.
Поясним подробнее существо и назначение каждого устройства.
Устройства 1, 2, 3 приемник 4, датчики 7/- 7м, измерительные преобразователи 5/ - 8м, аналогово-цифровой преобразователь (АЦП) 9, устройства 10, 11, 16, рулевые машины 17/ - 77,v составляют бортовую САУ 20. Структура описываемой бортовой САУ 20, находящейся в составе стенда, в основном не отличается от большинства применяемых систем управления для БПЛА. Поэтому ограничимся лишь кратким описанием ее составных частей, подробно останавливаясь на отличительных особенностях.
Для определения навигационных параметров служит интегрированная инерциально-спутниковая система навигации, объединяющая устройство 1. которое вместе с ДУС и акселерометрами может образовывать бесплатформенную инерциальную навигационную систему (БИПС), и приемник спутниковой навигационной системы (СНС) 4.
Устройства 1, 2 и 3 могут быть выполнены в виде отдельных ЦВМ. Функции устройств 1,2 и 3 могут выполняться одной ЦВМ, работающей в многозадачном режиме. ЦВМ в таком случае представляет собой универсальную одноплатную ЦВМ. которая с разделением во времени воспринимает информацию по всем линиям связи, обозначенным на схеме фиг.1. Примеры реализации ЦВМ приведены в 4. В частности, на испытаниях предлагаемого стенда использовался одноплатный компьютер на базе процессора Intel 486DX 166MHz. Структурная схема и устройство бортовой ЦВМ (одного из возможных вариантов) приведены в литературе (5 стр.133). Отметим, что возможны и другие варианты построения бортовой ЦВМ и ее связи с внешними устройствами. Широко распространенным является, например, ЦВМ с магистральным интерфейсом (ГОСТ 26765.52-67). Однако тип связи ЦВМ с внешними устройствами принципиального значения для существа полезной модели не имеет.
В предлагаемом стенде запоминающее устройство 3 кроме ячеек памяти содержит адаптер связи с внешними устройствами, обеспечивающее обмен данными по трем линиям связи с другими составляющими стенда. Первая линия осуществляет связь
c устройством 5. Вторая линия служит для получения информации от приемника 4 сне. Третья линия объединяет запоминающее устройство 3 с устройством 10 сопряжения. Вторая и третья линии, например, могут быть выполнены в виде интерфейса RS-232. Для пояснения основных задач, выполняемых устройствами 1-3. следует рассмотреть программное обеспечение (ПО) устройств 1-3. ПО устройства 1 решает задачу навигации, (т.е. находит основные навигационные параметры для определения местоположения либо в местной горизонтальной системе координат, либо в географических координатах, составляющих скорости аппарата.), комплексируя данные от датчиков 7/ - 7м параметров движения и приемника 4 СНС по второй и третьей линиям соответственно. ПО устройства 2 вычисляет значения управляющих воздействий для рулевых машин 171 - 77л; согласно соответствующему закону управления, под которым подразумевают требуемую зависимость выходных сигналов рулевых мащин 77/-/ 7л от совокупности входных сигналов, получаемых от датчиков 7/ - 7м параметров движения и устройства 1. Примеры различных технических и аналитических реализаций законов управления представлены в 6. Управляющие сигналы (7.V7 c7y,v для рулевых машин вырабатываются устройством 2 по данным устройства 1 и данным от наземного пульта 6 управления (командам оператора), и передаются по третьей линии в устройство 10. Запоминающее устройство 3 содержит в себе все оперативно используемые данные, которыми с разделением во времени оперируют все подключенные к магистрали 19 устройства, логически устройство 3 может быть выполнено в форме разделяемой памяти. Весь обмен данными между вышеописанными устройствами производится через запоминающее устройство 3. доступное к изменению в каждый момент времени для изменения либо по программе устройства 2, либо через приемо-передающее устройство беспроводной передачи цифровых данных оператором пульта 6 вручную в режиме РВ (для варианта с использованием RadioEthernet скорость связи между запоминающим устройством 3 и пультом 6 до 10Мбит/с). Последнее обстоятельство наряду с вышеописанной возможностью слежения с использованием высокоскоростного радиоканши дает основание считать данный стенд интерактивным. Устройство 5 может быть выполнено в виде СВЧ приемо-передатчика, находится на борту БПЛА, подключено к запоминающему устройству 3 первой линией и осуществляет высокоскоростную связь пульта 6 управления с устройством 3. Примером такой связи может быть реализация при помощи радиомодемов или при помощи RadioEthernet. При этом следует обрати гь внимание, что первая линия осуществляет связь по стандартному сетевому интерфейсу.
то есть в случае реализации устройств 1-3 в виде ЦВМ устройство 5 для нее является сетевым устройством, и связь с устройством 5 может осуществляться по интерфейсу lObaseT.
Наземный пульт 6 управления в виде устройства ввода/вывода выполняет функции контрольно-проверочной аппаратуры предстартовой подготовки БПЛА и является одновременно пультом управления и интерактивной отладки САУ (в части системы стабилизации) в режиме полунатурных/натурных испытаний. Пульт 6 представляет собой устройство ввода/вывода для отображения телеметрической информации БПЛА и передачи корректирующих и управляющих данных в запоминающее устройство 3, связан с устройством 5 радиоканалом. В данном случае радиоканал может быть реализован, например, на базе сети RadioEthernet. осуществляющей объединение устройств 1-3, выполненных в виде одной ЦВМ. и пульта, реализованного на базе портативного компьютера, в беспроводную вычислительную сеть.
Устройство приемника 4 СПС, работающего по сигналам GPS и ГЛОНАСС. описано, например в 7. Следует отметить, что для увеличения точности определения навигационных данных приемником СПС его необходимо использовать в паре со вторым приемником на земле в дифференциальном режиме. В данном случае приемник сне может быть любым малогабаритным, удовлетворяющим бортовую систему питания по потребляемой мощности и передающий навигационную информацию в стандарте NMEA-0183 с частотой не менее 1Гц. Отметим, что система подачи электропитания на фиг. 1 не указана.
Основу навигационной системы в предлагаемом стенде представляет БИПС. состоящая из микромеханических ДУС с акселерометров, и устройства 1. Более предпочтительным является вариант использования в составе БИПС устройства 1. выполненного в виде ЦВМ, поскольку рещение задачи навигации достаточно трудоемко. Кроме того, дополнительную информацию об ориентации БПЛА дают магниторезистивные датчики. Магниторезистивные датчики также используются для ориентации по азимуту. Однако для реализации стабилизации относительно центра масс БИПС не является неотъемлемой частью, ввиду чего в составе стенда не показана.
Отметим, что для управления БПЛА по высоте в системах прототипах используется высотомер, показания которого в вертикальной плоскости могут оказаться точнее, чем у гироинтегратора и даже приемника 4 СПС в дифференциальном режиме, однако для существа предлагаемой модели это значения не
имеет. В данном случае данные о высоте определяются при помощи баровысотомера. а на малых высотах (до 4 метров) может использоваться более точный ультразвуковой высотомер.
Датчики параметров движения 7i - 7м могут состоять из 3-х основных групп и Л/ измерительных преобразователей, осуществляющих сьем, первичную обработку информации с чувствительных элементов датчиков и передачу ее в аналоговоцифровой нреобразователь 9. При этом 1-ая группа состоит из 3-х ДУС и 3-х акселерометров, 2-ая из 2-х двухосевых магниторезистивных датчиков. 3-я из 2-х высотомеров. Количество датчиков во второй и третей группе может варьироваться в зависимости от их степени точности и чувствительности, так как они могут быть объединены по той или иной схеме комплексирования 8. Это не является существенным для данной полезной модели. В 1-ой группе три ДУС, являющиеся непременной составляющей БИНС, задействованы в контуре стабилизации аппарата относительно центра масс. В связи с этим количество этих датчиков может быть больше на число кратное трем.
В процессе работы информация с датчиков о проекциях угловой скорости на оси
чувствительности ДУС сОд-, соу, (о-, , ..., о линейном ускорении а,., а,,, а-, a,
векторе напряженности магнитного поля Земли Нх, Ну, Н-, высоте , /г, и сигналов а/// afi7 от ручного управления поступает на АЦП 9, далее в устройстве сопряжения 10 формируется последовательный поток данных, которые по третьей линии поступают в запоминающее устройство 3. Одновременно с этим широтно-ипульсно модулированные (ШИМ) радиосигналы всех каналов управления с приемника сигналов резервной системы 12 управления через устройство 10 и третью линию также поступают в устройство 3.
Устройства 15 и 12 представляющие собой передатчик и приемник сигналов резервной системы управления, являются стандартными устройствами, использующимися в авиамоделизме, и в данном контексте представляют собой ручное резервное радиоуправление. Устройства 13-15 обычно выполняются в одном конструктиве. Примером передатчика и приемника могут служить изделия японской фирмы Futaba передатчик Т9СПР и приемник FP-R138DF или любой другой с РРМ (Pulse Position Modulation) или PCM (Pulse Code Modulation) модуляцией. Связь между передатчиком 15 и приемником 12, например, может осуществляться по стандарту РРМ или РСМ1024 модуляции на частоте 35 МГц. Основное отличие данных стандартов заключается в следующем. В РРМ модуляции каждый (сигнал) кана
управления задается импульсом определенной длительности и после всех канальных импульсов идет синхронизирующая пауза до следующей посылки. В РСМ модуляции информация о каждом канале передается в виде числа, заданного с точностью от 8 до 10 разрядов, далее синхропакет, контрольная сумма и все это подается на устройство 14 вычисления значений управляющих сигналов для рулевых машин. В приемнике 12. после детектора, сигнал поступает на микроконтроллер (на схеме не показаны), который по синхропакету определяет начало посылки данных, декодирует их. проверяет контрольную сумму и в зависимости от результата решает, что делать дальше (выдать на рулевые машины, проигнорировать, перейти в режим failsafe или безопасный (данное устройство установит рулевую машину в положение, заданное вами ранее в надел де, что это спасет модель) и т.д.). Следует отметить, что выбор того или иного стандарта модуляции существенного значения для данной полезной модели не имеет, ввиду чего приемник 12 сигналов резервной системы управления упрощенно обозначен на фиг. 1 в виде одного блока.
Пульт 13 резервной системы управления служит для осуществления ручного резервного управления аппаратом посредством двух манипуляторов, имеющих две степени свободы и связанных с механическими датчиками углового положения. Сигналы управления с датчиков углового положения, содержащихся в пульте 13, поступают в устройство 14 вычисления значений управляющих сигналов для рулевых машин, в котором производится кодирование этих сигналов и преобразование к N ШИМ сигналам для дальнейшей передачи их передатчиком 15 сигналов резервной системы управления. Передатчик 15 в соответствии с ручным управлением пилотаэксперта, осуществляемого с помощью пульта 13 резервной системы управления формирует управляющие сигналы ani. ffnN и передает их по радиоканалу. При нажатии выключателя 18 в передатчике 15 формируется управляющий радиосигнал С7//Л + /, имеющий длительность больщую либо меньшую заранее выставленного порога в зависимости от положения выключателя. Далее радиосигнал ,/, получаемый приемником 12, передается на управляющий вход устройства 11 и переводит устройство 11 в состояние, при котором на входы усилительно-преобразовательного устройства 16 подаются управляющие сигналы о-у/. . ауд с выходов устройства 10. т.е. управляющих сигналов с устройства 2, либо в состояние, при котором на входы усилительно-преобразовательного устройства 16 подаются управляющие сигналы сг/// сг/уд; с приемника 12 (сигналы, полученные по радиоканалу от передатчика 15). Здесь индексы у и и обозначают сигналы с устройства 2 вычисления значений управляющих
воздействий и с приемника 12 сигналов резервной системы управления соответственно. Устройство 11 представляет собой, например, набор из Л механических двухпозиционных реле, инициирующих переключение по сигналу на управляющем входе, превышающем определенный порог.
Усилительно-преобразовательное устройство 16 осуществляет усиление и формирование из сигналов а,,..Л сигналы р, ..Л закладки рулей.
Методика экспериментальной отработки бортовой системы стабилизации и управления движением БПЛА в режиме РВ с использованием интерактивного стенда выглядит следующим образом. Будет рассмотрен конкретный пример применения интерактивного стенда для малогабаритного БПЛА вертолетного типа.
Основная система управления исследуемого малогабаритного вертолета автоматическая. Отрабатываемая САУ вертолета состоит, как было описано выше, из устройств 1-3, выполненных в виде ЦВМ (бортового компьютера), АЦП 9, устройств 10, И, 16, выполненных конструктивно на одной плате в виде контроллера внешних устройств, инерциальных датчиков (для отработки системы стабилизации относительно центра масс достаточно ДУС) с измерительными преобразователями 8 - 8м. пять рулевых машин 1, 172, 17з, 175, 176- В реализации данного стенда авторами полезной модели рулевые машины (РМ) функционально распределены следующим образом: рулевые машины 17i, 172, 17б, управляют положением автомата-перекоса, 174 управляет углом установки лопастей хвостового ротора, т.е. курсом, 175 - газом и общим шагом, т.е. углом установки лопастей основного ротора. Подключение приемного устройства к РМ показано на фиг.2. На фиг.2 обозначены .M - питание приемника, euKji не используется. Кроме того, в составе САУ присутствуют пульт 13. устройство 14, передатчик 15 с переключателем 18, выполненные в виде одного конструктива и приемник 12 сигналов резервной системы управления.
С вертолетом сопряжен интерактивный стенд, в который входит бортовая САУ. а также наземный 6 пульт управления на базе портативного компьютера (notebook). Пульт 6 управления связан с бортовой ЦВМ, например, по сети RadioEthernet. стандартному открытому протоколу TCP/IP (протокол сеансового уровня согласно семиуровневой модели ISO OSI) в локальную вычислительную беспроводную сеть. Базовым стандартом, определяющим протоколы связи, необходимые для организации локальных беспроводных сетей (Wireless Local Aria Network - WLAN), является IEEE 802.11. Приемо-передающее устройство 5 беспроводной передачи цифровых данных реализовано в виде точки радио-доступа Access Point и связано с устройством 3 по
стандарту IEEE 802.3 и, таким образом, в данном случае является и конвертором данных из стандартов проводной вычислительной сети в беспроводную и наоборот.
Наземный пульт 6 управления, как говорилось ранее, выполняет функции предстартовой подготовки БПЛА, отображая на экране портативного компьютера необходимую информацию о составляющих САУ перед стартом ЛА. На борту аппарата автоматическая предстартовая подготовка навигационных приборов производится соответствующей частью разработанного ПО. Перед запуском БПЛА все бортовые приборы получают электропитание от внешнего источника и по результатам тестовой проверки выдают обратные сигиалы готовности (или неисправности) на пульт 6. по которым оператор принимает решение о возможности запуска БПЛА. Подготовка включает в себя тест связи со всеми составляющими САУ, прогрев датчиков, их автоматическую калибровку. После проверки исправности всех бортовых систем и агрегатов на жесткий магнитный диск либо в запоминающее устройство ЦВМ при необходимости копируется программа полетного задания с последними коррективами (в виде опорных точек маршрута в географических координатах - в общем случае). законы управления по каналам управления, а также начальные параметры этих законов. При помощи пульта 6 выставляются начальные значения инерциштьных датчиков, соответствующие полученным ранее аналитическим данным. Кроме этого с помощью пульта 6 обеспечивается наблюдение за всеми параметрами САУ и слежение за параметрами законов управления. Аппаратура предстартовой проверки и ориентации гироскопических приборов описана, например, в 10 - 13.
Для отработки системы стабилизации по курсу конструктивно стенд может состоять из диска, имеющего вертикальную ось вращения. Подщипники вращения диска закреплены на неподвижном массивном основании. На диске неподвижно закреплён исследуемый вертолёт таким образом, чтобы ось вращения винта совпадача с осью вращения диска. То есть летательному аппарату дается только одна степень свободы.
Так как крен стабилизируется, то движение рыскания близко к плоском). Поэтому, ссылаясь на 9, движение вертолета по рысканию описывается более простым уравнением. Согласно которому, управляющее воздействие в канал рыскания вводится по закону
где S - угол отклонения органа управления (рулевой машины) рысканием, (о начальное положение угла отклонения, if/ - угол рыскания, со - угловая скорость рыскания, К/ и К2- эмпирические коэффициенты.
Особенностью отработки САУ для решения задачи курсовой стабилизации является обеспечение динамических режимов её работы, и соответственно испытания должпы проводиться в динамике. Это осложняет осуществление слежения за состоянием параметров САУ на удалении от ЛА в режиме РВ. Через высокоскоростной радиоканал, реализуемый, например, на базе RadioEthernet, производится наблюдение за всеми параметрами САУ (показаниями ДУС, данными радиоуправления, текущими рассчитанными координатами БПЛА) и слежение за параметрами закона управления (коэффициенты К/ и К2И начальное условие So). Следует отметить, что на борту ЦВМ установлена также операциопная система РВ QNX, что целесообразно при создании человеко-мащинных комплексов, критичных к показателям надежности и быстродействия 14.
После предстартовой подготовки производится пуск двигателя вертолета, далее при помощи радиоуправления экспертом с пульта 13 производится разгон основного ротора до номинального числа оборотов (сигнал (Тпз останавливается курсовое вращение аппарата (сигнал сгя-/) путем уравновешивания реактивного момента основного ротора моментом хвостового ротора. Сигналом сг//; с пульта 13. инициируемым выключателем 18 и поступающим на управляющий вход устройства 11. происходит переключение в устройстве 11 управления по курсу с ручного на автоматическое, при этом сигналы управления сг/у/. . ацб продолжают поступать в устройство 10 для записи вместе с остальными данными телеметрии либо в ЦВМ, либо в пульт 6 управления. Параметры САУ, за которыми ведется наблюдение, передаются в пульт 6 одним пакетом данных из устройства 3, например, в виде структуры языка С. Параметры, за которыми ведется слежение, передаются из пульта 6 в соответствующие ячейки памяти устройства 3, после чего 2 незамедлительно передает эти данные в виде управляющих сигналов cryyv в устройство 10 и далее через усилительнопреобразовательное устройство 16 сигналы рд- поступают на РМ 77/ - 17. Таким образом, фактически производится параметрический синтез САУ по курсу, пригодной для применения при натурных испытаниях. Адекватность поведения ЛА управляющим воздействиям гарантируется экспертом.
САУ и делает этот процесс более экономичным по отношению к исследуемому аппарату, поскольку вероятность его разрушения уменьшается за счет наличия ручной резервной системы управления.
Для дополнительного пояснения методики экспериментальной отработки бортовой системы стабилизации и управления движением беспилотного летательного аппарата в режиме РВ на этапе натурного (в отличие от прототипа) моделирования приведем логико-временную последовательность ее работы.
1-Предстартовая подготовка, прогрев датчиков устройства 5.
2-Ввод типа закона управления для конкретного канала управления (стабилизация угла рыскания либо стабилизация углового ускорения), начальных данных закона управления So, KI, К2 , (Кз при величине углового ускорения во втором типе закона).
3-Старт БПЛА, раскручивание основного ротора до номинальных оборотов (пилот-эксперт) путем повышения газа при помощи пульта 13 ручного управления. Постоянное наблюдение за данными телеметрии на экране пульта 6.
4-Переключение управления сигналом (тп от выключателя 18 с ручного от пульта 13 на автоматическое от устройства 2.
5-Наблюдение отработки угловой стабилизации (остановка нежелательного врашения, получение необходимого времени переходного процесса), подбор на пульте коэффициентов К, К} до получения желаемого, идентичного с пилотом-экспертом, управления.
6-Остановка (посадка) БПЛА.
Данная методика сокращает цикл разработки от внесения изменений в программную часть бортовой САУ до наблюдения отработки управляющих воздействий реальным объектом, поскольку в натурных аппаратах изменение полетного задания и тем более законов управления подразумевает доступ к неподвижному БПЛА в лабораторных условиях.
Следует отметить, что этап математического моделирования при создании подобной САУ может быть проведен заранее в лабораторных условиях или в обслуживающей организации. Однако ввиду сложности создания математической модели малогабаритного БПЛА вертолетного типа как объекта управления, объясняемой большой чувствительности аппарата к изменению параметров, данная методика может быть использована для уточнения параметров модели путем
экспериментальной отработки. Таким образом, данная методика с использованием интерактивного стенда в цикле разработки САУ БПЛА находится между полунатурным моделированием и натурными испытаниями и может использоваться в натурных испытаниях.
В результате использования полезной модели получена возможность интерактивной отработки системы стабилизации БПЛА, в частности, и всей САУ в целом, в том числе на этапе натурных испытаний, при повышении безопасности и экономичности испытаний.
Представленные чертежи и описание предлагаемой полезной модели позволяют, используя существующую элементную базу, изготовить ее промышленным способом и использовать в качестве интерактивного стенда отработки бортовой системы автоматической стабилизации малогабаритного беспилотного летательного аппарата, что характеризует предлагаемую полезную модель как промышленно применимую.
Список литературы
1.Шаров С.Н. Основы проектирования координаторов систем управления движущимися объектами. Гособразование СССР, 1990 г.
2.Патент России № 2205441, МПК G05B 23/02, опубликованный 27.05.2003 г.
3.Спунда Б. Летающие модели вертолетов. М.: Мир, 1988. (Прототип)
4.Преснухин Л.Н., Шахнов В.А., Кустов В.А. Основы конструирования микроэлектронных вычислительных мащин (уч. пособие). М.: Высшая школа, 1976.
5.Смолов В.Б., Барашенков В.В., Байков В.Д. и др. Специализированные ЦВМ (учебник). М.: Высшая школа, 1981.
6.Боднер В.А. Системы управления летательными аппаратами (учебник). М.: Машиностроение, 1973.
7.Интегрированные инерциально-спутниковые системы навигации: Сборник статей и докладов / Под общей ред. Пешехонова В.Г.-СПб.: ГНЦ РФ-ЦПИИ «Электроприбор, 2001г.
8.Иванов Ю.П. и др. Комплексирование информационно-измерительных устройств летательных аппаратов./Иванов Ю.П., Синяков А.Н., Филатов И.В.; под ред. Боднера В.А./ - Л.: Машиностроение, 1984. -207 с.
к
10.Андреев В.Д. Теория инерциальной навигации. Автономные системы. М.: Наука, 1966.
11.Инерциальная навигация / под ред. К.Ф. О Доннела. М.: Наука, 1969.
12.Липтон А. Выставка инерциальных систем на подвижном основании. М.: Наука. 1971.
13.Репников А.В., Сачков Г.П., Черноморский А. И. Гироскопические системы (уч. пособие). М.: Машиностроение, 1983.
14.Козачок В.К., Сеньков А.В. Разработка комплексного имитатора внешних устройств на основе интеграции операционных систем. Труды БГТУ, Вопросы новых информационных технологий в технических системах. С-Пб.: 2001г.
Claims (1)
- Интерактивный стенд отработки системы стабилизации малогабаритного беспилотного летательного аппарата, содержащий устройство вычисления навигационных параметров, устройство вычисления значений управляющих воздействий, объединенные магистралью информационного обмена с запоминающим устройством, связанным по отдельным линиям с приемником спутниковой навигационной системы для получения навигационных данных, с приемо-передающим устройством беспроводной передачи цифровых данных, с устройством сопряжения, к входам которого подключен аналогово-цифровой преобразователь и выходы приемника сигналов резервной системы управления, а к выходам устройства сопряжения подключено устройство коммутации, к входам которого также подключены выходы с первого по N-й приемника сигналов резервной системы управления, где аналогово-цифровой преобразователь служит для оцифровки сигналов, полученных по аналоговым каналам от измерительных преобразователей, связанных с датчиками параметров движения, выходы управляющих сигналов с первого по N-й приемника сигналов резервной системы управления соединены с соответствующими входами устройства сопряжения, передатчик сигналов резервной системы управления связан по радиоканалу с приемником сигналов резервной системы управления, входы с первого по N-й передатчика управляющих сигналов резервной системы управления соединены с соответствующими выходами устройства вычисления значений управляющих сигналов для рулевых машин, входы которого соединены с соответствующими выходами пульта резервной системы управления, выключатель резервной системы управления соединен с передатчиком управляющих сигналов резервной системы управления и формирует сигнал управления устройством коммутации, (N+l)-й выход приемника сигналов резервной системы управления соединен с управляющим входом устройства коммутации, которое производит подключение входов усилительно-преобразовательного устройства, в зависимости от сигнала на его управляющем входе либо к выходам устройства сопряжения, либо к выходам приемника сигналов резервной системы управления, выходы усилительно-преобразовательного устройства соединены с соответствующими рулевыми машинами, устройство вычисления навигационных параметров, устройство вычисления значений управляющих воздействий, запоминающее устройство, приемник спутниковой навигационной системы, М датчиков параметров движения, М измерительных преобразователей, аналогово-цифровой преобразователь, устройство сопряжения, устройство коммутации, приемник сигналов резервной системы управления, усилительно-преобразовательное устройство, N рулевых машин составляют бортовую систему автоматического управления беспилотного летательного аппарата, бортовая система автоматического управления связана по каналу беспроводной передачи цифровых данных с наземным пультом управления, который кроме задач предстартовой подготовки, имея доступ к запоминающему устройству в режиме реального времени, дает возможность производить оператору интерактивную отработку системы стабилизации.
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| RU2003130180/20U RU35448U1 (ru) | 2003-10-13 | 2003-10-13 | Интерактивный стенд отработки бортовой системы автоматической стабилизации малогабаритного беспилотного летательного аппарата вертолетного типа |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| RU2003130180/20U RU35448U1 (ru) | 2003-10-13 | 2003-10-13 | Интерактивный стенд отработки бортовой системы автоматической стабилизации малогабаритного беспилотного летательного аппарата вертолетного типа |
Publications (1)
| Publication Number | Publication Date |
|---|---|
| RU35448U1 true RU35448U1 (ru) | 2004-01-10 |
Family
ID=36295776
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| RU2003130180/20U RU35448U1 (ru) | 2003-10-13 | 2003-10-13 | Интерактивный стенд отработки бортовой системы автоматической стабилизации малогабаритного беспилотного летательного аппарата вертолетного типа |
Country Status (1)
| Country | Link |
|---|---|
| RU (1) | RU35448U1 (ru) |
Cited By (4)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2506621C2 (ru) * | 2012-04-26 | 2014-02-10 | Федеральное казенное предприятие "Научно-испытательный центр ракетно-космической промышленности" (ФКП "НИЦ РКП") | Устройство синхронизации системы управления стендовыми испытаниями ракетно-космической техники |
| RU2524045C2 (ru) * | 2012-08-16 | 2014-07-27 | Открытое акционерное общество "Ракетно-космическая корпорация "Энергия" имени С.П. Королева" | Способ определения географических координат области наблюдения перемещаемой относительно космического аппарата аппаратуры наблюдения, система для его осуществления и устройство размещения излучателей на аппаратуре наблюдения |
| RU2628873C2 (ru) * | 2016-10-10 | 2017-08-22 | Акционерное общество "Конструкторское бюро промышленной автоматики" | Стенд для испытаний элементов беспилотного вертолета с соосными винтами |
| RU2774479C1 (ru) * | 2021-11-01 | 2022-06-21 | Акционерное общество "Центр научно-технических услуг "ЦАГИ" | Способ идентификации и валидации математической модели динамики полета и системы управления беспилотных воздушных судов вертикального взлета и посадки (БВС ВВП) с использованием роботизированного стенда полунатурного моделирования |
-
2003
- 2003-10-13 RU RU2003130180/20U patent/RU35448U1/ru not_active IP Right Cessation
Cited By (6)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2506621C2 (ru) * | 2012-04-26 | 2014-02-10 | Федеральное казенное предприятие "Научно-испытательный центр ракетно-космической промышленности" (ФКП "НИЦ РКП") | Устройство синхронизации системы управления стендовыми испытаниями ракетно-космической техники |
| RU2524045C2 (ru) * | 2012-08-16 | 2014-07-27 | Открытое акционерное общество "Ракетно-космическая корпорация "Энергия" имени С.П. Королева" | Способ определения географических координат области наблюдения перемещаемой относительно космического аппарата аппаратуры наблюдения, система для его осуществления и устройство размещения излучателей на аппаратуре наблюдения |
| RU2628873C2 (ru) * | 2016-10-10 | 2017-08-22 | Акционерное общество "Конструкторское бюро промышленной автоматики" | Стенд для испытаний элементов беспилотного вертолета с соосными винтами |
| RU2774479C1 (ru) * | 2021-11-01 | 2022-06-21 | Акционерное общество "Центр научно-технических услуг "ЦАГИ" | Способ идентификации и валидации математической модели динамики полета и системы управления беспилотных воздушных судов вертикального взлета и посадки (БВС ВВП) с использованием роботизированного стенда полунатурного моделирования |
| RU2781047C1 (ru) * | 2022-01-17 | 2022-10-04 | Федеральное государственное казенное военное образовательное учреждение высшего образования "Военная академия Ракетных войск стратегического назначения имени Петра Великого" МО РФ | Стенд испытания и настройки беспилотных летательных аппаратов различной конфигурации |
| RU2799166C1 (ru) * | 2023-02-27 | 2023-07-04 | Акционерное общество "ЭЙРБУРГ" | Устройство имитации движения летательного аппарата для отработки программного и аппаратного обеспечения полётного контроллера |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| EP2064511B1 (en) | Autonomous vehicle rapid development testbed systems and methods | |
| Jordan et al. | AirSTAR: A UAV platform for flight dynamics and control system testing | |
| CN111856965A (zh) | 一种无人机可视化半实物仿真系统及其仿真方法 | |
| Cai et al. | Design and assembling of a UAV helicopter system | |
| CN103487822A (zh) | 北斗/多普勒雷达/惯性自主式组合导航系统及其方法 | |
| Ariante et al. | UAS for positioning and field mapping using LIDAR and IMU sensors data: Kalman filtering and integration | |
| CN107643759A (zh) | 从无人机拍摄移动图像的具有目标跟踪和定位的自主系统 | |
| Bingler et al. | Dual radio autopilot system for lightweight, swarming micro/miniature aerial vehicles | |
| Cork | Aircraft dynamic navigation for unmanned aerial vehicles | |
| Corban et al. | Implementation of adaptive nonlinear control for flight test on an unmanned helicopter | |
| CN112572829B (zh) | 无人机飞行模拟方法及系统 | |
| Kritskiy et al. | Increasing the reliability of drones due to the use of quaternions in motion | |
| RU35448U1 (ru) | Интерактивный стенд отработки бортовой системы автоматической стабилизации малогабаритного беспилотного летательного аппарата вертолетного типа | |
| CN119246121B (zh) | 基于自主定位gnss的室内无人机飞行控制导航性能评估方法 | |
| Raimundo et al. | Using distance sensors to perform collision avoidance maneuvres on uav applications | |
| Raimundo | Autonomous obstacle collision avoidance system for uavs in rescue operations | |
| RU2629709C2 (ru) | Устройство полунатурного моделирования системы управления беспилотным летательным аппаратом с радиолокационным визиром | |
| RU2498193C2 (ru) | Способ инерциального автосопровождения заданного объекта визирования и система для его осуществления | |
| RU2207309C2 (ru) | Способ отработки систем управления угловым движением космических аппаратов и устройство, его реализующее | |
| CN109709821B (zh) | 弹上通讯时延测量方法 | |
| CN114995187A (zh) | 一种光学类跟瞄单机半物理闭环测试系统及方法 | |
| RU2799166C1 (ru) | Устройство имитации движения летательного аппарата для отработки программного и аппаратного обеспечения полётного контроллера | |
| Kaminer et al. | Rapid Flight Test Prototyping System and the Fleet of UAV's and MAVs at the Naval Postgraduate School | |
| CN113985906A (zh) | 一种基于无人机平台的车载机动式标校系统及方法 | |
| RU2774479C1 (ru) | Способ идентификации и валидации математической модели динамики полета и системы управления беспилотных воздушных судов вертикального взлета и посадки (БВС ВВП) с использованием роботизированного стенда полунатурного моделирования |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| MM1K | Utility model has become invalid (non-payment of fees) |
Effective date: 20051014 |