RU2647530C2 - Устройство, способ и система для избеганий столкновений при бурении - Google Patents
Устройство, способ и система для избеганий столкновений при бурении Download PDFInfo
- Publication number
- RU2647530C2 RU2647530C2 RU2016115367A RU2016115367A RU2647530C2 RU 2647530 C2 RU2647530 C2 RU 2647530C2 RU 2016115367 A RU2016115367 A RU 2016115367A RU 2016115367 A RU2016115367 A RU 2016115367A RU 2647530 C2 RU2647530 C2 RU 2647530C2
- Authority
- RU
- Russia
- Prior art keywords
- transmitter
- well
- magnetic dipoles
- probes
- target well
- Prior art date
Links
- 238000005553 drilling Methods 0.000 title claims abstract description 34
- 238000000034 method Methods 0.000 title claims description 25
- 238000005259 measurement Methods 0.000 claims abstract description 45
- 239000000523 sample Substances 0.000 claims abstract description 27
- 230000015572 biosynthetic process Effects 0.000 claims abstract description 26
- 230000003213 activating effect Effects 0.000 claims 2
- 230000004913 activation Effects 0.000 claims 2
- 230000005540 biological transmission Effects 0.000 claims 1
- 230000000694 effects Effects 0.000 abstract description 4
- 238000005065 mining Methods 0.000 abstract 1
- 239000000126 substance Substances 0.000 abstract 1
- 238000005755 formation reaction Methods 0.000 description 21
- 230000005284 excitation Effects 0.000 description 14
- 239000012530 fluid Substances 0.000 description 9
- 238000010796 Steam-assisted gravity drainage Methods 0.000 description 8
- 238000009826 distribution Methods 0.000 description 4
- 230000005684 electric field Effects 0.000 description 4
- 230000005484 gravity Effects 0.000 description 4
- 238000002347 injection Methods 0.000 description 4
- 239000007924 injection Substances 0.000 description 4
- 238000004519 manufacturing process Methods 0.000 description 4
- 238000005516 engineering process Methods 0.000 description 3
- 229930195733 hydrocarbon Natural products 0.000 description 3
- 150000002430 hydrocarbons Chemical class 0.000 description 3
- 239000003921 oil Substances 0.000 description 3
- 238000012545 processing Methods 0.000 description 3
- 238000006243 chemical reaction Methods 0.000 description 2
- 239000004020 conductor Substances 0.000 description 2
- 238000013461 design Methods 0.000 description 2
- 230000035945 sensitivity Effects 0.000 description 2
- 239000004215 Carbon black (E152) Substances 0.000 description 1
- 230000002411 adverse Effects 0.000 description 1
- 238000004458 analytical method Methods 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 230000000295 complement effect Effects 0.000 description 1
- 238000011161 development Methods 0.000 description 1
- 238000010586 diagram Methods 0.000 description 1
- 238000000605 extraction Methods 0.000 description 1
- 238000011010 flushing procedure Methods 0.000 description 1
- 239000000295 fuel oil Substances 0.000 description 1
- 230000006698 induction Effects 0.000 description 1
- 238000005461 lubrication Methods 0.000 description 1
- 239000000463 material Substances 0.000 description 1
- 239000003129 oil well Substances 0.000 description 1
- 238000011084 recovery Methods 0.000 description 1
- 238000011160 research Methods 0.000 description 1
- 238000005070 sampling Methods 0.000 description 1
- 239000000243 solution Substances 0.000 description 1
- 238000003860 storage Methods 0.000 description 1
- 238000003786 synthesis reaction Methods 0.000 description 1
- 238000004804 winding Methods 0.000 description 1
Images








Classifications
-
- E—FIXED CONSTRUCTIONS
- E21—EARTH OR ROCK DRILLING; MINING
- E21B—EARTH OR ROCK DRILLING; OBTAINING OIL, GAS, WATER, SOLUBLE OR MELTABLE MATERIALS OR A SLURRY OF MINERALS FROM WELLS
- E21B47/00—Survey of boreholes or wells
- E21B47/09—Locating or determining the position of objects in boreholes or wells, e.g. the position of an extending arm; Identifying the free or blocked portions of pipes
-
- E—FIXED CONSTRUCTIONS
- E21—EARTH OR ROCK DRILLING; MINING
- E21B—EARTH OR ROCK DRILLING; OBTAINING OIL, GAS, WATER, SOLUBLE OR MELTABLE MATERIALS OR A SLURRY OF MINERALS FROM WELLS
- E21B47/00—Survey of boreholes or wells
- E21B47/02—Determining slope or direction
- E21B47/022—Determining slope or direction of the borehole, e.g. using geomagnetism
- E21B47/0228—Determining slope or direction of the borehole, e.g. using geomagnetism using electromagnetic energy or detectors therefor
-
- E—FIXED CONSTRUCTIONS
- E21—EARTH OR ROCK DRILLING; MINING
- E21B—EARTH OR ROCK DRILLING; OBTAINING OIL, GAS, WATER, SOLUBLE OR MELTABLE MATERIALS OR A SLURRY OF MINERALS FROM WELLS
- E21B43/00—Methods or apparatus for obtaining oil, gas, water, soluble or meltable materials or a slurry of minerals from wells
- E21B43/30—Specific pattern of wells, e.g. optimising the spacing of wells
- E21B43/305—Specific pattern of wells, e.g. optimising the spacing of wells comprising at least one inclined or horizontal well
-
- E—FIXED CONSTRUCTIONS
- E21—EARTH OR ROCK DRILLING; MINING
- E21B—EARTH OR ROCK DRILLING; OBTAINING OIL, GAS, WATER, SOLUBLE OR MELTABLE MATERIALS OR A SLURRY OF MINERALS FROM WELLS
- E21B47/00—Survey of boreholes or wells
- E21B47/02—Determining slope or direction
-
- E—FIXED CONSTRUCTIONS
- E21—EARTH OR ROCK DRILLING; MINING
- E21B—EARTH OR ROCK DRILLING; OBTAINING OIL, GAS, WATER, SOLUBLE OR MELTABLE MATERIALS OR A SLURRY OF MINERALS FROM WELLS
- E21B47/00—Survey of boreholes or wells
- E21B47/02—Determining slope or direction
- E21B47/022—Determining slope or direction of the borehole, e.g. using geomagnetism
- E21B47/0228—Determining slope or direction of the borehole, e.g. using geomagnetism using electromagnetic energy or detectors therefor
- E21B47/0232—Determining slope or direction of the borehole, e.g. using geomagnetism using electromagnetic energy or detectors therefor at least one of the energy sources or one of the detectors being located on or above the ground surface
-
- E—FIXED CONSTRUCTIONS
- E21—EARTH OR ROCK DRILLING; MINING
- E21B—EARTH OR ROCK DRILLING; OBTAINING OIL, GAS, WATER, SOLUBLE OR MELTABLE MATERIALS OR A SLURRY OF MINERALS FROM WELLS
- E21B47/00—Survey of boreholes or wells
- E21B47/12—Means for transmitting measuring-signals or control signals from the well to the surface, or from the surface to the well, e.g. for logging while drilling
- E21B47/13—Means for transmitting measuring-signals or control signals from the well to the surface, or from the surface to the well, e.g. for logging while drilling by electromagnetic energy, e.g. radio frequency
-
- E—FIXED CONSTRUCTIONS
- E21—EARTH OR ROCK DRILLING; MINING
- E21B—EARTH OR ROCK DRILLING; OBTAINING OIL, GAS, WATER, SOLUBLE OR MELTABLE MATERIALS OR A SLURRY OF MINERALS FROM WELLS
- E21B7/00—Special methods or apparatus for drilling
- E21B7/04—Directional drilling
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01V—GEOPHYSICS; GRAVITATIONAL MEASUREMENTS; DETECTING MASSES OR OBJECTS; TAGS
- G01V3/00—Electric or magnetic prospecting or detecting; Measuring magnetic field characteristics of the earth, e.g. declination, deviation
- G01V3/18—Electric or magnetic prospecting or detecting; Measuring magnetic field characteristics of the earth, e.g. declination, deviation specially adapted for well-logging
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01V—GEOPHYSICS; GRAVITATIONAL MEASUREMENTS; DETECTING MASSES OR OBJECTS; TAGS
- G01V3/00—Electric or magnetic prospecting or detecting; Measuring magnetic field characteristics of the earth, e.g. declination, deviation
- G01V3/18—Electric or magnetic prospecting or detecting; Measuring magnetic field characteristics of the earth, e.g. declination, deviation specially adapted for well-logging
- G01V3/20—Electric or magnetic prospecting or detecting; Measuring magnetic field characteristics of the earth, e.g. declination, deviation specially adapted for well-logging operating with propagation of electric current
-
- G—PHYSICS
- G01—MEASURING; TESTING
- G01V—GEOPHYSICS; GRAVITATIONAL MEASUREMENTS; DETECTING MASSES OR OBJECTS; TAGS
- G01V3/00—Electric or magnetic prospecting or detecting; Measuring magnetic field characteristics of the earth, e.g. declination, deviation
- G01V3/18—Electric or magnetic prospecting or detecting; Measuring magnetic field characteristics of the earth, e.g. declination, deviation specially adapted for well-logging
- G01V3/20—Electric or magnetic prospecting or detecting; Measuring magnetic field characteristics of the earth, e.g. declination, deviation specially adapted for well-logging operating with propagation of electric current
- G01V3/24—Electric or magnetic prospecting or detecting; Measuring magnetic field characteristics of the earth, e.g. declination, deviation specially adapted for well-logging operating with propagation of electric current using ac
Landscapes
- Life Sciences & Earth Sciences (AREA)
- Engineering & Computer Science (AREA)
- Physics & Mathematics (AREA)
- Geology (AREA)
- Mining & Mineral Resources (AREA)
- Environmental & Geological Engineering (AREA)
- General Life Sciences & Earth Sciences (AREA)
- Fluid Mechanics (AREA)
- Geochemistry & Mineralogy (AREA)
- Geophysics (AREA)
- Electromagnetism (AREA)
- Remote Sensing (AREA)
- General Physics & Mathematics (AREA)
- Geophysics And Detection Of Objects (AREA)
- Earth Drilling (AREA)
- Electrical Discharge Machining, Electrochemical Machining, And Combined Machining (AREA)
- Infusion, Injection, And Reservoir Apparatuses (AREA)
Abstract
Изобретение относится к направленному бурению скважин. Техническим результатом является повышение точности дальнометрии между опорной и целевой скважинами. В частности, предложена система для дальнометрии между опорной скважиной и целевой скважиной, содержащая первый передатчик и второй передатчик с магнитными диполями, размещенные в опорной скважине; устройство для измерения напряжения, содержащее множество зондов; и контроллер, соединенный с устройством для измерения напряжения для вычисления расстояния или относительного направления между целевой скважиной и опорной скважиной на основании отношения измерений разностей напряжения, сделанных с использованием первого передатчика с магнитными диполями и второго передатчика с магнитными диполями. При этом второй передатчик радиально, аксимально или азимутально отделен от указанного первого датчика. Зонды могут быть размещены в целевой скважине, опорной скважине или на поверхности геологической формации. 3 н. и 23 з.п. ф-лы, 20 ил.
Description
Уровень техники
[0001] В настоящее время относительно трудным и потенциально дорогостоящим является направление бурового долота через месторождение, на котором густо расположены нефтедобывающие скважины, в качестве части формирования новой скважины без прерывания добычи из каких-либо других скважин в этом месторождении.
Краткое описание чертежей
[0002] На фиг. 1 показан вариант осуществления одной или большего количества конфигураций передатчика с магнитными диполями.
[0003] На фиг. 2A и 2B показан вариант осуществления системы дальнометрии, показывающий различные размещения электродов.
[0004] На фиг. 3A-3C показаны различные варианты осуществления измерения градиента диполей.
[0005] На фиг. 4A и 4B показаны различные варианты осуществления бурильных стратегий в соответствии с вариантами осуществления, показанными на фиг. 1 и 2.
[0006] На фиг. 5 показана блок-схема варианта осуществления способа дальнометрии.
[0007] На фиг. 6A-6G показаны различные варианты осуществления конфигураций электродов для каротажа во время бурения и кабельного каротажа.
[0008] На фиг. 7A и 7B показаны различные варианты осуществления конфигураций матрицы электродов.
[0009] На фиг. 8 показана кабельная система.
[0010] На фиг. 9 показана система буровой установки.
Подробное описание
[0011] По мере выработки легких для доступа и легких для добычи углеводородных ресурсов оставшиеся скважины становятся более трудными для доступа. Кроме того, мировая потребность в углеводородах постоянно растет, удовлетворение этой потребности может применять развитие более прогрессивных процедур извлечения, таких как применение метода парогравитационного дренажа (SAGD, Steam Assisted Gravity Drainage). Технология SAGD нацелена на проблему подвижности скважин с тяжелой нефтью посредством нагнетания высокотемпературного пара высокого давления, который снижает вязкость нефти и обеспечивает возможность легкого извлечения. Такое нагнетание выполняют из ствола скважины (например, нагнетательной скважины, опорной скважины), который пробурен параллельно добывающей скважине (например, целевой скважине) на расстоянии порядка нескольких метров друг от друга. Размещение опорной скважины должно выполняться с очень небольшим запасом расстояния, поскольку слишком близкое размещение подвергло бы добывающую скважину воздействию очень высоких давления и температуры, а слишком далекое размещение снизило бы эффективность процесса. Традиционные технологии разведки могут испытывать недостатки от расширения конуса неопределенности, поскольку скважина получается длиннее, и они не могут достигать точности в размещении, которая используется в этом применении.
[0012] Различные варианты осуществления, раскрытые в настоящем документе, используют комбинацию передатчиков с магнитными диполями и электродных измерений напряжения. Передатчики с магнитными диполями могут быть размещены в скважине и/или на поверхности геологической формации. По сравнению с возбуждением поверхностного типа различные варианты осуществления не производят нежелательные индукционные сигналы на приемники из-за вращения магнитных датчиков относительно земли. Это обеспечивает возможность выполнения измерений во время вращения, что может устранять одно из ограничений применений в дальнометрии.
[0013] Как использовано в настоящем документе, целевая скважина может быть ликвидированной или нефтедобывающей или газодобывающей скважиной, которая существует в месторождении, и которую следует избегать при бурении последующей скважины. Целевая скважина также может быть существующей скважиной, которая зафонтанировала и подлежит пересечению на выбранной глубине под поверхностью земли разгрузочной скважиной. В соответствии с альтернативным вариантом осуществления целевая скважина может представлять некоторую другую аномалию, расположенную в земле, такую как электропроводящую геологическую формацию, скважинную трубу, бурильную колонну в необсаженной скважине или некоторый другой электропроводящий материал, который может быть целью для пересечения или избегания. Для целей настоящего раскрытия такой материал будет называться целевой скважиной или трубой целевой скважины.
[0014] Вблизи целевой скважины может быть вторая буровая скважина, которая пробуривается и которую следует направлять таким образом, чтобы пересекать целевую скважину или избегать ее. Для удобства вторая буровая скважина будет называться опорной скважиной. Опорная скважина обычно начинается в устье скважины на поверхности земли и может быть относительно близко к устью целевой скважины или может располагаться на расстоянии. В устье скважины подсекции или утяжеленные бурильные трубы закрепляют конец к концу для формирования бурильной колонны и опускают в скважину в ходе буровых работ обычным способом. Во внутреннюю часть отверстия колонны могут подавать буровой раствор в качестве фитинга, снова обычным способом.
[0015] Устройство для дальнометрии может содержать две части: (1) передающее устройство с магнитными диполями, которое генерирует переменные токи (АС) на трубе целевой скважины, и (2) приемник с электродами, который измеряет абсолютное и дифференциальное напряжения, обусловленные этими АС токами, от электродов, размещенных в устье скважины, на небольшой глубине вблизи поверхности геологической формации и/или в контакте с целевой скважиной. Передающее устройство с магнитными диполями может быть размещено в виде части каротажного прибора, размещаемого в опорной скважине. Относительное расстояние и направление от опорной скважины к целевой скважине могут быть определены при помощи анализа измеренных напряжений на основании абсолютных и дифференциальных возбуждений магнитных диполей.
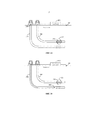
[0016] Передатчики с магнитными диполями, работающие на относительно низких частотах (например, 0,02-250 Гц), могут быть использованы для индуцирования АС в целевой скважине. Один или большее количество передатчиков с магнитными диполями может быть использовано в качестве части передающего устройства с магнитными диполями для генерации АС.
[0017] На фиг. 1 показан вариант осуществления конфигурации передающего устройства 206 с магнитными диполями, использующего один передатчик 103 с магнитными диполями, как представлено посредством Hy2, расположенный в опорной скважине 100 для индуцирования АС в целевой скважине 120. В соответствии с вариантом осуществления, где измерения выполняются в то время, когда передатчик вращается, один физический передатчик 103 с магнитными диполями может быть использован для синтеза четырех результатов 101-104 магнитных диполей при различных углах вращения, если была выполнена сортировка измерений. Четыре результата 101-104 магнитных диполей представлены посредством Hx1, Hx2, Hy1 и Hy2. На фиг. 1 показаны синтезированные передатчики 101, 102, 104 с магнитными диполями, представленные пунктирными линиями, тогда как физический передатчик 103 с магнитными диполями представлен сплошной линией. В соответствии с альтернативным вариантом осуществления все передатчики с магнитными диполями могут быть физическими. Например, каждый передатчик 101-104 с магнитными диполями может быть физическим передатчиком с магнитными диполями. Хотя электрически более сложная система, имеющая физические передатчики с магнитными диполями, может уменьшать ошибки из-за операций синтеза.
[0018] Передатчики 101-104 с магнитными диполями могут быть размещены к наружной поверхности каротажного прибора. Если используется более, чем один физический передатчик 101-104 с магнитными диполями, они могут быть отделены радиально от других передатчиков с магнитными диполями и расположены, по существу, на равном расстоянии от осевой средней линии 130 опорной скважины 100, но на противоположной стороне опорной скважины 100 от противоположных передатчиков с магнитными диполями.
[0019] Передатчики 101-104 с магнитными диполями могут индуцировать закрытые электрические силовые линии в геологической формации и токи по трубе 120 целевой скважины. Индуцированные токи при таких относительно низких частотах могут достигать расстояний, больше чем 10 000 футов (3048 метров). Таким образом, такая реализация хорошо работает для применений SAGD.
[0020] В некоторых случаях передатчики 101-104 с магнитными диполями работают в дифференциальном режиме, где данные напряжения при различных углах вращения диполя вычитаются. Для того чтобы улучшать уровень сигнала напряжения, соответствующего дифференциальным данным, передатчики с магнитными диполями могут быть помещены настолько далеко от осевой средней линии указанного прибора, как это возможно. Кроме того, магнитные диполи на противоположных сторонах оси указанного прибора (т.е. которые разделены на 180 градусов) могут быть использованы в вычитании. Другой вариант осуществления для получения дифференциального возбуждения состоит в помещении антенны 101, 103 с противоположными обмотками на двух сторонах указанного прибора. Это может физически уравновешивать токи и способствовать калибровке указанного прибора.
[0021] Для того чтобы улучшать управляемость бурового долота, передатчики 101-104 с магнитными диполями могут быть помещены так близко к долоту, как это возможно (например, рядом с ним). В применениях SAGD бурильная колонна, расположенная в опорной скважине 100, может быть, по существу, параллельной целевой трубе 120, так что размещение передатчиков 101-104 с магнитными диполями может быть менее важным с точки зрения управляемости. В соответствии с другими вариантами осуществления передатчики с магнитными диполями помещены где-либо на бурильной колонне, например, на долоте.
[0022] На фиг. 2A и 2B показан вариант осуществления системы дальнометрии, показывающий различные размещения электродов. Система дальнометрии может содержать приемник и контроллер 201, соединенный с множеством электродов 202, 203. Приемник и контроллер 201 может содержать вольтметр для измерения абсолютного и дифференциального напряжений между электродами 202, 203. Приемник и контроллер 201 также может содержать управляющие схемы для управления работой системы, а также и выполнения любых способов дальнометрии, таких как показанный на фиг. 5. Варианты осуществления, показанные на фиг. 2A и 2B, приведены только для целей иллюстрации, поскольку могут быть использованы другие системы и другие местоположения для электродов.
[0023] На фиг. 2A и 2B показаны целевая скважина 204 и опорная скважина 205. Передающее устройство 206 с магнитными диполями, которое содержит указанный один или большее количество передатчиков 101-104 с магнитными диполями, показано расположенным в опорной скважине 205. Передающее устройство 206 с магнитными диполями может генерировать АС на трубе 205 опорной скважины для того, чтобы генерировать электрическое поле 207, которое может создавать дифференциал напряжения, как измеряется электродами 202, 203.
[0024] В соответствии с вариантом осуществления, показанным на фиг. 2А, первый электрод 202 расположен на поверхности геологической формации. Второй электрод 203 присоединен к целевой скважине 204. Например, электрод 203 может быть присоединен посредством изолированного провода к устью или к области, окружающей устье целевой скважины 204. Если присоединен к области, окружающей устье целевой скважины, этот электрод может быть расположен на относительно небольшой глубине (например, < 6м). В соответствии с этим вариантом осуществления измерение напряжения выполняют по трубе через устье и поверхностные геологические формации.
[0025] В соответствии с вариантом осуществления, показанным на фиг. 2В, первый электрод 202 расположен на поверхности геологической формации. Второй электрод 203 расположен в трубе 204 целевой скважины. В соответствии с этим вариантом осуществления измерение напряжения выполняют с использованием изолированного кабеля, который размещен в целевой трубе, в соответствии с предпочтительным вариантом осуществления, вблизи области, намеченной для бурения SAGD.
[0026] В соответствии с обоими вариантами осуществления, показанными на фиг. 2A и 2B, измеренная разность напряжений указывает на величину токов, индуцированных в трубе 204 целевой скважины. Для того чтобы минимизировать сопротивление нагрузки, присоединенной к источнику, электродный контакт может быть выполнен с возможностью уменьшения сопротивления электрода, насколько это возможно. Уменьшение нагрузки может улучшать отношение сигнала к шуму для измерения напряжения. В соответствии с вариантом осуществления со скважинными электродами могут использовать механический зажим. В горизонтальной или по существу горизонтальной части трубы длинный участок проводящего материала, как часть электрода, может быть соединен с нижней стороной трубы и может быть протолкнут к трубе с помощью силы тяжести.
[0027] Неожидаемые колебания распределения тока по трубе могут приводить к относительно небольшим измеренным напряжениям между электродами или инвертированию знака измеренного напряжения. Проблема с небольшими измеренными напряжениями может быть решена при помощи использования различной частоты возбуждения АС или положения передающего устройства с магнитными диполями, которое, как предполагается, будет производить различное распределение тока на трубе опорной скважины. Проблема с инвертированием знака напряжения может быть обнаружена на основании сравнения между различными прошлыми измерениями напряжения или различной частотой или перемещения положений передатчика.
[0028] Возбуждение целевой скважины посредством одного передатчика с магнитными диполями может быть иллюстрировано при помощи следующих уравнений, где r - расстояние, на котором один передатчик с магнитными диполями находится от ориентированной по z трубе целевой скважины. Разность напряжений на двух дальних конечных точках трубы целевой скважины может быть приблизительно выражена так:
где V - приблизительное напряжение, E - вектор напряженности электрического поля, C- контур вдоль трубы, Ez - компонент по оси z электрического поля в таком положении трубы, которое является ближайшим к магнитному диполю, и K - коэффициент пропорциональности, который зависит от свойств формации и трубы. В случае одного направленного по оси x передатчика с магнитными диполями в геометрии, показанной на фиг. 1, напряжение, генерируемое на двух точках в однородной формации, может быть записано как:
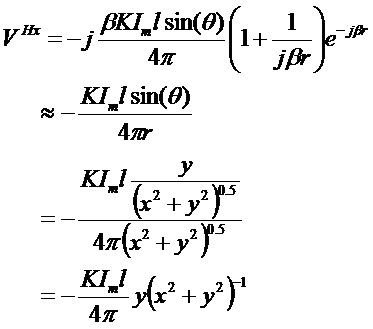
где 
, 
, β - волновое число, r - радиальное расстояние, θ - угол относительной ориентации. Аналогично, напряжение, обусловленное направленным по оси y передатчиком с магнитными диполями, может быть приблизительно выражено как:
[0029] "Дифференциальное" возбуждение направленного по оси y магнитного диполя, объединенного с направленным по оси y магнитным диполем противоположного направления (как показано на фиг. 1), произведет
[0030] Аналогично, дифференциальное возбуждение двух направленных по оси x магнитных диполей произведет
[0031] Можно наблюдать, что посредством анализа абсолютных измерений с направленными по оси x и направленными по оси y магнитными диполями возможно определять ориентацию трубы следующим образом:
[0032] Взяв отношение абсолютных измерений к измерениям дифференциального возбуждения как для направленных по оси x, так и для направленных по оси y возбуждений, возможно получать расстояние до трубы следующим образом:
[0033] Хотя уравнения (7) и (8) обеспечивают расстояние до трубы целевой скважины, они имеют комплиментарное численное поведение. Уравнение (7) в численном отношении наиболее устойчиво при θ=180k, тогда как уравнение (8) наиболее устойчиво при θ=90+180k (k - целое число) из-за размера знаменателя. Выбор уравнения для вычисления расстояния наилучшим способом выполняется на основании того, какое из уравнений более устойчиво для заданного диапазона θ.
[0034] Описанные выше варианты осуществления могут быть использованы в применениях SAGD на практике. Однако, из уравнений (7) и (8) можно видеть, что когда θ=45+90k, знаменатель стремится к нулю, что указывает на то, что знаменатель (измерение) также должен будет стремиться к нулю. Это также является неустойчивым в численном отношении условием, которое содержит "слепое пятно" для измерений дифференциального возбуждения. Существует область, в которой выполненные измерения не будут такими полезными или точными, как в других областях.
[0035] На фиг. 3A-3C показаны различные варианты осуществления для конфигураций измерения возбуждения 3-, 4- и 8-диполей соответственно. Конфигурации измерений возбуждения различных диполей показаны только для целей иллюстрации. Нет ограничений как на количество передатчиков с магнитными диполями, используемых для генерации различных конфигураций, так и на количество конфигураций измерения.
[0036] Вариант осуществления с передатчиком с тремя магнитными диполями, показанный на фиг. 3A, и вариант осуществления с передатчиком с четырьмя магнитными диполями, показанный на фиг. 3В, могут испытывать недостатки от проблемы слепого пятна. Каждый из передатчиков с магнитными диполями представлен посредством Hy, Hx1, Hx2 для варианта осуществления с передатчиком с 3-мя магнитными диполями, показанный на фиг. 3А, и посредством Hx1, Hx2, Hy1 и Hy2 для варианта осуществления с передатчиком с 4-мя магнитными диполями, показанный на фиг. 3В. В случае цели, находящейся в направлении по оси x или оси y, местоположения, имеющие точки наивысшей численной устойчивости, показаны, как местоположения 301-308. Области, которые находятся в середине этих местоположений 301-308, т.е. местоположений, составляющих угол в 45 градусов к оси x или оси y, могут рассматриваться, как слепые пятна.
[0037] В третьей конфигурации, показанной на фиг. 3С, направления наивысшей чувствительности для двух наборов диполей указаны как местоположения 310-313 и местоположения 320-323 соответственно, если находится в направлении по оси x или оси y. Однако если цель составляет угол 45 градусов с осью x или осью y, местоположения 320-323 имеют наивысшую чувствительность. В результате конфигурация, показанная на фиг. 3С, может производить устойчивый результат для всех измерений, тогда как конфигурации, показанные на фиг. 3A и 3B, могут производить неустойчивые результаты на основании относительной ориентации трубы целевой скважины. В случае выполнения измерений во время вращения бурильной колонны большое количество измерений может быть выполнено при различных углах вращения, производя вариации, которые являются достаточными для устранения выбранных слепых пятен.
[0038] Каждый из передатчиков с магнитными диполями при активации (например, при подаче питания) имеет магнитный момент. Как известно из уровня техники, магнитный момент является величиной, которая определяет силу, которую передатчик с магнитными диполями может прилагать на электрические токи, и крутящий момент, который магнитное поле будет прилагать на передатчик с магнитными диполями. Передатчик с магнитными диполями может иметь магнитный момент, который направлен в противоположном направлении от магнитного момента радиально отделенного передатчика с магнитными диполями.
[0039] Например, из четырех передатчиков с магнитными диполями Hx1, Hx2, Hy1 и Hy2 с фиг. 3B, Hx1 и Hx2 радиально отделены друг от друга и генерируют магнитные моменты в противоположном друг от друга направлении. Аналогично, Hy1 и Hy2 радиально отделены друг от друга и генерируют магнитные моменты в противоположном друг от друга направлении. В соответствии с вариантом осуществления радиально отделенные передатчики с магнитными диполями могут быть, по существу, на равном расстоянии от осевой средней линии опорной скважины и, по существу, в противоположном направлении по сравнению с другими передатчиками с магнитными диполями из указанных радиально отделенных передатчиков с магнитными диполями.
[0040] На фиг. 4A и 4B показаны различные варианты осуществления бурильных стратегий с использованием системы дальнометрии и способов дальнометрии, раскрытых в настоящем документе. На фиг. 4А показан подход триангуляции, где может быть выполнено множество измерений 400-403 ориентаций (θ). Эти измерения 400-403 могут быть наложены на данные разведки для выполнения триангуляции положения опорной скважины 205 относительно целевой скважины 204, как показано.
[0041] На фиг. 4В показано, как может быть выполнена дальнометрия, когда доступно достоверное измерение расстояния. В соответствии с этим вариантом осуществления нет необходимости в триангуляции, и опорная скважина 205 может быть пробурена без движения по спирали вокруг целевой скважины 204. Этот вариант осуществления может быть использован для помощи в регулировке расстояния между скважинами с использованием множества измерений 420-423 относительного расстояния между опорной скважиной 205 и целевой скважиной 204.
[0042] В тех вариантах осуществления, где требуется пересечение скважин, могут быть использованы оба варианта осуществления, показанные на 4A и 4B. В применениях SAGD может быть использован вариант осуществления, показанный на фиг. 4В, поскольку оптимальное положение для нагнетательной скважины находится выше добывающей скважины из-за соображений силы тяжести.
[0043] На фиг. 5 показана блок-схема варианта осуществления работы системы дальнометрии, как было обсуждено ранее. Сначала пробуривают одну из опорной скважины (например, нагнетательной скважины) или целевой скважины (например, добывающей скважины). Традиционно, первой пробуривают добывающую скважину, поскольку она должна быть размещена в пласте в оптимальном положении для выработки большего количества углеводородов. Приспособление для размещения скважин, такое как азимутальный прибор каротажа сопротивления или прибор каротажа сопротивления со сверхбольшим радиусом исследования, может быть использован для размещения добывающей скважины на выбранных расстояниях от смежных слоев в пласте. Данные разведки могут быть собраны при бурении первой скважины для помощи в направлении второй скважины.
[0044] Затем могут начинать бурение второй скважины с наклонного участка, направляемого либо информацией разведки, либо абсолютной или градиентной информацией от прибора для измерения дальности. После наклонного участка выполняют процедуру удержания второй скважины параллельно и на требуемом расстоянии к первой скважине. Раскрытая система дальнометрии может обеспечивать возможность по существу одинакового расстояния, или она может следовать предписанному или управляемому изменяемому расстоянию на основании локальных характеристик формации.
[0045] Низкий уровень шума, который требуется для дальнометрии, может быть достигнут посредством остановки бурения во время дальнометрических измерений. Время между остановкой бурения и началом дальнометрии может быть оптимизировано для снижения шума из-за биения труб, а также минимизировано время простоя. Аналогично, продолжительность дальнометрической деятельности может быть выбрана таким образом, чтобы отклонять шум электрической системы и магнитной среды, в то же время снижая время простоя.
[0046] Во время дальнометрии передатчики с магнитными диполями и электродные приемники активированы по существу одновременно 500 от поверхности, либо автоматически, либо вручную. Во время возбуждения с помощью передатчиков с магнитными диполями электроды могут быть активированы от поверхности или посредством скважинного алгоритма, который обнаруживает токи трубы.
[0047] Между первым и вторым электродами измеряют 503 сигналы дифференциального напряжения, сгенерированные из-за АС в трубе опорной скважины. Затем могут определять 504 абсолютное и дифференциальное напряжения, а также определять 505 относительное направление и относительное расстояние до целевой скважины, используя уравнения, как описано выше. Траекторию пробуриваемой скважины могут регулировать с использованием вычисленных относительного направления и относительного расстояния до целевой скважины 506. Этот способ могут повторять до тех пор, пока скважина пробуривается, и требуется дальнометрия.
[0048] Поскольку результаты направления и расстояния основаны на координатной системе приемника, могут выполнять преобразование для того, чтобы преобразовывать эти результаты в земные координаты или другую координатную систему, которая может быть использована в геонавигации бурового долота. Для измерения ориентации приемника и выполнения преобразования, упомянутого выше, могут использовать информацию о гравитации и магнитном поле Земли.
[0049] Процедуру дальнометрии, описанную выше, могут выполнять на определенных интервалах глубины, что улучшает характеристики точности геонавигации и снижает время бурения. Для регулировки этих интервалов могут использовать априорную информацию. Например, если данные разведки первой скважины указывают на то, что предполагается, что эта скважина будет пологой, то интервалы между дальнометрическими измерениями могут быть увеличены. Если предполагается, что скважина будет иметь резко искривившийся ствол, дальнометрические измерения могут выполнять более быстро. Вблизи конца скважины токи ведут себя иначе по сравнению с другими секциями, поскольку линия прохождения тока изменена. Для того, чтобы устранить неблагоприятное воздействие, первую скважину могут пробуривать более длинной, чем вторую скважину. На основе этих сценариев можно переключаться на различные обрабатывающие технологии. Например, если требуется, чтобы вторая скважина следовала траектории, которая удалена от первой скважины, могут локально использовать дальнометрию на основании абсолютного значения.
[0050] На фиг. 6A-6G показаны различные варианты осуществления конфигураций электродов для LWD (logging-while-drilling, каротаж во время бурения) и кабельного каротажа. На фиг. 6A-6E показаны варианты осуществления LWD, тогда как на фиг. 6F и 6G показаны кабельные варианты осуществления.
[0051] Электроды 601, 602 могут быть расположены на расстоянии 6-90 м от передатчиков. Электроды 601, 602 электрически присоединены к бурильной колонне с помощью промежуточных переводников, которые моги или не могут разделять электроды 601, 602. Такое расположение может увеличивать измерение напряжения посредством устранения короткого замыкания между электродами 601, 602, и увеличивать эффективную внешнюю резистивную нагрузку электродной системы. Аналогично, промежуточные переводники 603-605 могут быть помещены над и под бурильной колонной для того, чтобы избегать какого-либо прямого соединения между приемниками и передатчиками.
[0052] Например, на фиг. 6А показан промежуточный переводник 603 между электродами 601, 602. На фиг. 6C и 6D показаны переменные электроды 601, 602 с промежуточными переводниками 603-605. На фиг. 6Е показаны промежуточные переводники 603, 604 на каждой стороне электродов 601, 602, которые разделены друг от друга. На фиг. 6В показаны электроды 601, 602, просто отделенные друг от друга, без использования каких-либо промежуточных переводников.
[0053] Во всех вариантах осуществления, показанных на фиг. 6A-6E,электроды находятся в электрическом контакте со скважинным флюидом и геологической формацией. Эти варианты осуществления также имеют электроды, находящиеся в электрическом контакте с оправкой прибора и с геологической формацией через буровой раствор.
[0054] На фиг. 6F и 6G показан кабель 620 внутри LWD конфигурации, где инструмент на кабеле с электродным приемником 601 опускают в LWD бурильную колонну 620. В вариантах осуществления, показанных на фиг. 6F и 6G, измеряется напряжение между измерительным электродом 601 и поверхностью геологической формации. Также можно измерять разность напряжения между кабельными электродами (не показано). Промежуточные переводники 603 могут использовать на бурильной колонне 620, которые могут способствовать снижению эффектов соединения между приемником и передатчиком.
[0055] Неожидаемые колебания распределения тока по трубе могут производить либо небольшие измеренные напряжения между электродами, либо инверсию знака измеренного напряжения. Проблема с небольшими измеренными напряжениями может быть решена при помощи использования различной частоты возбуждения АС или различного положения передающего устройства с магнитными диполями, которое может производить различное распределение тока на трубе опорной скважины.
[0056] Инвертирование знака напряжения может быть обнаружено на основании сравнения между различными прошлыми измерениями напряжения или различной частотой или положениями источника. На фиг. 7A и 7B показаны варианты осуществления с конфигурацией матрицы электродов, где в измерениях напряжения использованы более, чем два электрода 701-703. Промежуточный переводник 705 может быть использован в различных местоположениях матрицы электродов.
[0057] На фиг. 8 показан вариант осуществления кабельной системы 864, как части целевой скважины 812, как показано на фиг. 2A и 2B. На фиг. 9 показан вариант осуществления системы 964 буровой установки, как части опорной скважины 912, как показано на фиг. 2A и 2B. Во время бурильных работ опорной скважины 912, как показано на фиг. 9, может потребоваться знать расстояние между опорной скважиной 912 и уде пробуренной целевой скважиной 812, показанной на фиг. 8.
[0058] Система 864 с фиг. 8 может содержать части корпуса 870 прибора, как часть кабельных каротажных работ, которые содержат один или большее количество электродов 800, как описано ранее. Система с фиг. 9 может содержать скважинный инструмент 924, как часть скважинных бурильных работ, которые содержат передающее устройство с магнитными диполями, как описано ранее.
[0059] На фиг. 8 показана буровая платформа 886, которая оснащена буровой вышкой 888, которая поддерживает подъемник 890. Бурение нефтяных и газовых скважин обычно производят с использованием колонны бурильных труб, соединенных вместе таким образом, чтобы формировать бурильную колонну, которую опускают через буровой ротор 810 в ствол 812 скважины. Здесь предполагается, что бурильная колонна была на время удалена из ствола 812 скважины для обеспечения возможности опускания корпуса 870 кабельного каротажного прибора, такого как зонд или каротажный заряд, посредством кабеля или каротажного кабеля 874 в ствол 812 скважины. Обычно корпус 870 прибора опускают на дно интересующего участка и впоследствии вытягивают вверх по существу с постоянной скоростью.
[0060] Во время бурения ближайшей опорной скважины, данные измерения могут быть переданы на поверхностное каротажное оборудование 892 для хранения, обработки и/или анализа. По меньшей мере один из описанных выше электродов 800 для дальнометрии между опорной скважиной и целевой скважиной может являться частью корпуса 870 кабельного каротажного прибора. Каротажное оборудование 892 может быть снабжено электронным оборудованием 854, 896 для различных типов обработки сигнала, которое может быть использовано любым одним или большим количеством электродов 800. Аналогичные данные оценки формации могут быть собраны и проанализированы во время бурильных работ (например, во время операций LWD и, путем расширения, отбора проб во время бурения).
[0061] На фиг. 9 показана система 964, которая также может содержать буровую установку 902, расположенную на поверхности 904 скважины 906. Буровая установка 902 может обеспечивать опору для бурильной колонны 908. Бурильная колонна 908 может быть выполнена с возможностью прохождения через буровой ротор для бурения ствола 912 скважины через подземные формации 914. Бурильная колонна 908 может содержать ведущую бурильную трубу 916, бурильную трубу 918 и компоновку 920 низа бурильной колонны, возможно, расположенную на нижней части бурильной трубы 918.
[0062] Компоновка 920 низа бурильной колонны может содержать утяжеленные бурильные трубы 922, скважинный инструмент 924 и буровое долото 926. Буровое долото 926 может быть выполнено с возможностью создания ствола 912 скважины посредством прохождения через поверхность 904 и подземные формации 914. Скважинный инструмент 924 может содержать любой из множества различных типов инструментов, включающих инструменты MWD (measurement while drilling, измерение во время бурения), инструменты LWD и другие.
[0063] Во время бурильных работ бурильная колонна 908 (возможно, содержащая ведущую бурильную трубу 916, бурильную трубу 918 и компоновку 920 низа бурильной колонны) может вращаться при помощи бурового ротора. В дополнении к этому, или вместо этого компоновка 920 низа бурильной колонны также может вращаться при помощи двигателя (например, забойного турбинного двигателя), который расположен в скважине. Утяжеленные бурильные трубы 922 могут быть использованы для добавления нагрузки на буровое долото 926. Утяжеленные бурильные трубы 922 также могут быть выполнены с возможностью придания жесткости компоновке 920 низа бурильной колонны, обеспечивая возможность передачи добавленной нагрузки компоновкой 920 низа бурильной колонны на буровое долото 926, и, в свою очередь, для помощи буровому долоту 926 в прохождении через поверхность 904 и подземные формации 914.
[0064] Во время бурильных работ буровой насос 932 может прокачивать буровой раствор (иногда известный специалистам в области техники, как "промывочная жидкость") от приемной емкости 934 для бурового раствора через шланг 936 в бурильную трубу 918 и вниз к буровому долоту 926. Буровой раствор может вытекать из бурового долота 926 и возвращаться на поверхность 904 через кольцевую область 940 между бурильной трубой 918 и сторонами ствола 912 скважины. Затем буровой раствор может быть возвращен в приемную емкость 934 для бурового раствора, где этот раствор фильтруют. В соответствии с некоторыми вариантами осуществления буровой раствор может быть использован для охлаждения бурового долота 926, а также для обеспечения смазки для бурового долота 926 во время бурильных работ. Кроме того, буровой раствор может быть использован для удаления обрезков подземных формаций 914, создаваемых работой бурового долота 926.
[0065] В соответствии с некоторыми вариантами осуществления система 964 может содержать дисплей 996 для представления информации о напряжении, как измерено посредством электродов 800 и создано в ответ на передающее устройство 900 с магнитными диполями. Эта информация может быть использована в управлении буровым долотом 926 во время бурильных работ, как было описано ранее. Система 964 также может содержать вычислительную логику, возможно, в качестве части поверхностного каротажного оборудования 992 или компьютерной рабочей станции 954, для приема сигналов от передатчиков и приемников и других контрольно-измерительных приборов для определения расстояния до целевой скважины 812.
[0066] Следует понимать, что устройства и системы в соответствии с различными вариантами осуществления могут быть использованы в применениях, отличных от описанных выше. Иллюстрации систем 864, 964 предназначены для обеспечения общего понимания конструкции различных вариантов осуществления, и не предполагается, что они служат в качестве полного описания всех элементов и признаков устройств и систем, которые могли бы использовать конструкции, описанные в настоящем документе.
[0067] В приведенном выше подробном описании можно видеть, что различные признаки сгруппированы вместе в одном варианте осуществления для целей оптимизации настоящего раскрытия. Этот способ согласно настоящему раскрытию не должен быть интерпретирован как отражающий намерение о том, что заявленные варианты осуществления требуют больше признаков, чем ясно изложено в каждом пункте формулы изобретения. Напротив, как отражено в последующих пунктах формулы изобретения, предмет изобретения заключается в меньшем количестве, чем все признаки одного раскрытого варианта осуществления. Таким образом, последующая формула изобретения настоящим включена в подробное описание и чертежи, при этом каждый пункт формулы изобретения выступает сам по себе, как отдельный вариант осуществления.
Claims (39)
1. Система для дальнометрии между опорной скважиной и целевой скважиной, содержащая
первый передатчик с магнитными диполями, размещенный в опорной скважине;
второй передатчик с магнитными диполями, размещенный в опорной скважине, причем второй передатчик радиально, аксимально или азимутально отделен от указанного первого датчика;
устройство для измерения напряжения, содержащее множество зондов, причем каждый зонд размещен в одном из следующего: целевая скважина, опорная скважина или поверхность геологической формации, содержащей указанные опорную скважину и целевую скважину; и
контроллер, соединенный с устройством для измерения напряжения для вычисления расстояния или относительного направления между целевой скважиной и опорной скважиной на основании отношения измерений разностей напряжения, сделанных с использованием первого передатчика с магнитными диполями и второго передатчика с магнитными диполями.
2. Система по п. 1, в которой первый зонд из указанного множества зондов соединен с устьем целевой скважины, а второй зонд из указанного множества зондов соединен с землей на поверхности.
3. Система по п. 1, в которой указанное множество зондов соединено с разделенными по оси точками в целевой скважине.
4. Система по п. 1, в которой указанное множество зондов соединено с разделенными по оси точками в опорной скважине.
5. Система по п. 4, в которой указанное множество зондов соединено с компоновкой низа бурильной колонны (ВНА, bottom hole assembly) и отделено от ВНА посредством промежуточных переводников.
6. Система по п. 1, в которой второй передатчик с магнитными диполями имеет магнитный момент, который направлен в противоположном направлении от магнитного момента первого передатчика с магнитными диполями.
7. Система по п. 6, в которой второй передатчик с магнитными диполями находится, по существу, на равном расстоянии от осевой средней линии опорной скважины и, по существу, в противоположном направлении по сравнению с первым передатчиком с магнитными диполями, при этом расчет указанного расстояния включает расчет расстояния на основе первого отношения.
8. Система по п. 7, в которой расчет расстояния дополнительно включает расчет расстояния на основе угловой ориентации целевой скважины.
9. Система по п. 8, в которой указанное первое отношение включает первую тригонометрическую функцию угловой ориентации и вторую тригонометрическую функцию угловой ориентации.
10. Система по п. 9, в которой расстояние рассчитано как произведение первого отношения и второго отношения измерений.
11. Система по п. 10, в которой расстояние рассчитано как  , где r - расстояние, θ - угловая ориентация, VHy1 - измерение, выполненное первым передатчиком с магнитными диполями, VHy1 - измерение, выполненное вторым передатчиком с магнитными диполями, Δх - изменение положения первого передатчика с магнитными диполями во время измерения VHy1.
, где r - расстояние, θ - угловая ориентация, VHy1 - измерение, выполненное первым передатчиком с магнитными диполями, VHy1 - измерение, выполненное вторым передатчиком с магнитными диполями, Δх - изменение положения первого передатчика с магнитными диполями во время измерения VHy1.
12. Способ дальнометрии между опорной скважиной и целевой скважиной, включающий:
активацию первого передатчика с магнитными диполями в целевой скважине;
активацию второго передатчика с магнитными диполями в целевой скважине, причем второй передатчик радиально, аксимально или азимутально отделен от указанного первого датчика;
обнаружение разности напряжения между парой зондов, причем любой один зонд из указанной пары зондов проводящим образом соединен с целевой скважиной, опорной скважиной или поверхностью геологической формации; и
определение по меньшей мере одного из расстояния или относительного направления между опорной скважиной и целевой скважиной на основании отношения измерений разностей напряжения, сделанных с использованием первого передатчика с магнитными диполями и второго передатчика с магнитными диполями.
13. Способ по п. 12, дополнительно включающий регулировку направления бурильных работ на основании по меньшей мере одного из расстояния или относительного направления.
14. Способ по п. 12, в котором второй передатчик с магнитными диполями имеет магнитный момент, который направлен в противоположном направлении по сравнению с магнитным моментом первого передатчика с магнитными диполями.
15. Способ по п. 14, в котором второй передатчик с магнитными диполями активизируют одновременно с первым передатчиком с магнитными диполями.
16. Способ по п. 13, дополнительно включающий генерацию переменного тока в целевой скважине с помощью второго передатчика с магнитными диполями.
17. Способ по п. 15, дополнительно включающий генерацию переменного тока в целевой скважине с помощью трех или большего количества передатчиков с магнитными диполями.
18. Способ по п. 14, в котором активация первого передатчика с магнитными диполями включает передачу сигнала от одного из следующего: передатчика с 3-мя диполями, передатчика с 4-мя диполями или передатчика с 8-ю диполями.
19. Способ по п. 13, в котором активация первого передатчика с магнитными диполями включает передачу переменного тока от первого передатчика с магнитными диполями, соединенного с компоновкой низа бурильной колонны, буровым снарядом или инструментом на кабеле, расположенным в опорной скважине.
20. Способ дальнометрии между опорной скважиной и целевой скважиной, включающий:
опускание первого передатчика с магнитными диполями в целевую скважину;
опускание второго передатчика с магнитными диполями в целевую скважину, причем второй передатчик радиально, аксимально или азимутально отделен от указанного первого датчика;
генерацию переменного тока в целевой скважине посредством по меньшей мере одного из первого передатчика и второго передатчика;
обнаружение разности напряжения между парой зондов, причем первый зонд из указанной пары зондов проводящим образом соединен с геологической формацией, а второй зонд из указанной пары зондов соединен с целевой скважиной или с опорной скважиной; и
определение по меньшей мере одного из расстояния или относительного направления между опорной скважиной и целевой скважиной на основании отношения измерений разностей напряжения, сделанных с использованием первого передатчика с магнитными диполями и второго передатчика с магнитными диполями.
21. Способ по п. 20, дополнительно включающий соединение второго зонда из указанной пары зондов с устьем целевой скважины.
22. Способ по п. 20, дополнительно включающий размещение указанной пары зондов на разделенных по оси точках в целевой скважине.
23. Способ по п. 20, дополнительно включающий размещение указанной пары зондов на разделенных по оси точках в опорной скважине.
24. Способ по п. 20, дополнительно включающий размещение указанной пары зондов в компоновке низа бурильной колонны (ВНА), причем указанные зонды разделены посредством промежуточного переводника.
25. Способ по п. 20, в котором указанная пара зондов является частью инструмента на кабеле.
26. Способ по п. 20, дополнительно включающий обнаружение абсолютного напряжения между указанной парой зондов на основании переменного тока в целевой скважине.
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| PCT/US2013/078120 WO2015099790A1 (en) | 2013-12-27 | 2013-12-27 | Drilling collision avoidance apparatus, methods, and systems |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| RU2016115367A RU2016115367A (ru) | 2017-10-25 |
| RU2647530C2 true RU2647530C2 (ru) | 2018-03-16 |
Family
ID=53479449
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| RU2016115367A RU2647530C2 (ru) | 2013-12-27 | 2013-12-27 | Устройство, способ и система для избеганий столкновений при бурении |
Country Status (9)
| Country | Link |
|---|---|
| US (1) | US10119389B2 (ru) |
| AR (1) | AR098791A1 (ru) |
| AU (1) | AU2013408734B2 (ru) |
| CA (1) | CA2930531C (ru) |
| GB (1) | GB2534748B (ru) |
| NO (1) | NO20160793A1 (ru) |
| RU (1) | RU2647530C2 (ru) |
| SA (1) | SA516371012B1 (ru) |
| WO (1) | WO2015099790A1 (ru) |
Families Citing this family (15)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| MX2016002893A (es) * | 2013-09-05 | 2016-12-20 | Evolution Engineering Inc | Transmision de datos a través de espacios aislantes de la electricidad en una sarta de perforación. |
| US10119389B2 (en) * | 2013-12-27 | 2018-11-06 | Halliburton Energy Services, Inc. | Drilling collision avoidance apparatus, methods, and systems |
| WO2015102578A1 (en) * | 2013-12-30 | 2015-07-09 | Halliburton Energy Services, Inc. | Ranging using current profiling |
| CN104343438B (zh) * | 2014-09-10 | 2018-07-31 | 北京纳特斯拉科技有限公司 | 测量钻井相对距离的旋转磁场测距仪及其测量方法 |
| CA2959868C (en) * | 2014-10-17 | 2018-11-27 | Applied Technologies Associates, Inc. | Active magnetic azimuthal toolface for vertical borehole kickoff in magnetically perturbed environments |
| WO2017096196A1 (en) * | 2015-12-03 | 2017-06-08 | Baker Hughes Incorporated | Communication using electrical signals transmitted through earth formations between boreholes |
| CA3001300C (en) * | 2015-12-18 | 2021-02-23 | Halliburton Energy Services, Inc. | Systems and methods to calibrate individual component measurement |
| BR112019004107B1 (pt) | 2016-10-06 | 2022-07-19 | Halliburton Energy Services, Inc | Sistema de variação eletromagnética, e, método para variação eletromagnética de um poço alvo |
| GB2573065B (en) | 2017-01-31 | 2022-02-23 | Halliburton Energy Services Inc | Optimization of ranging measurements |
| CN109209353B (zh) * | 2017-07-03 | 2022-06-03 | 中国石油天然气股份有限公司 | 在油气井的钻井过程中确定井间距离和方向的装置及方法 |
| WO2019083762A1 (en) | 2017-10-26 | 2019-05-02 | Halliburton Energy Services, Inc. | DETERMINATION OF TUBING AND FORMATION PROPERTIES USING ELECTROMAGNETIC MEASUREMENTS |
| CN110863817B (zh) * | 2019-12-03 | 2020-07-21 | 西南石油大学 | 一种超声波井眼防碰监测系统及监测方法 |
| CN112253084B (zh) * | 2020-09-15 | 2024-02-27 | 中石化石油工程技术服务有限公司 | 一种井下双探头磁测量装置及方法 |
| GB2622535A (en) * | 2021-06-25 | 2024-03-20 | Baker Hughes Oilfield Operations Llc | Determination of order and/or direction of downhole components |
| CN115324565B (zh) * | 2022-09-26 | 2023-06-09 | 中国石油天然气集团有限公司 | 一种井眼轨迹测控方法、装置、电子设备及存储介质 |
Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5218301A (en) * | 1991-10-04 | 1993-06-08 | Vector Magnetics | Method and apparatus for determining distance for magnetic and electric field measurements |
| US5589775A (en) * | 1993-11-22 | 1996-12-31 | Vector Magnetics, Inc. | Rotating magnet for distance and direction measurements from a first borehole to a second borehole |
| US20030076107A1 (en) * | 2001-08-03 | 2003-04-24 | Baker Hughes Incorporated | Method and apparatus for a multi-component induction instrument measuring system for geosteering and formation resistivity data interpretation in horizontal, vertical and deviated wells |
| US20060113112A1 (en) * | 2004-11-30 | 2006-06-01 | General Electric Company | Method and system for precise drilling guidance of twin wells |
| US20090308657A1 (en) * | 2008-06-13 | 2009-12-17 | Schlumberger Technology Corporation | Magnetic ranging and controlled earth borehole drilling |
| US20110139507A1 (en) * | 2009-12-10 | 2011-06-16 | Baker Hughes Incorporated | Method and Apparatus for Borehole Positioning |
| WO2012009375A1 (en) * | 2010-07-13 | 2012-01-19 | Vector Magnetics Llc | Electromagnetic orientation system for deep wells |
Family Cites Families (51)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3838335A (en) * | 1973-02-23 | 1974-09-24 | Continental Oil Co | Method and apparatus for determining the presence of and depth to a horizontal electrical resistivity contrast beneath the earth surface |
| US4372398A (en) * | 1980-11-04 | 1983-02-08 | Cornell Research Foundation, Inc. | Method of determining the location of a deep-well casing by magnetic field sensing |
| US5187440A (en) * | 1986-11-04 | 1993-02-16 | Para Magnetic Logging, Inc. | Measuring resistivity changes from within a first cased well to monitor fluids injected into oil bearing geological formations from a second cased well while passing electrical current between the two cased wells |
| US5064006A (en) | 1988-10-28 | 1991-11-12 | Magrange, Inc | Downhole combination tool |
| US5329448A (en) * | 1991-08-07 | 1994-07-12 | Schlumberger Technology Corporation | Method and apparatus for determining horizontal conductivity and vertical conductivity of earth formations |
| US5485089A (en) * | 1992-11-06 | 1996-01-16 | Vector Magnetics, Inc. | Method and apparatus for measuring distance and direction by movable magnetic field source |
| US6396276B1 (en) * | 1996-07-31 | 2002-05-28 | Scientific Drilling International | Apparatus and method for electric field telemetry employing component upper and lower housings in a well pipestring |
| US6188223B1 (en) * | 1996-09-03 | 2001-02-13 | Scientific Drilling International | Electric field borehole telemetry |
| US5923170A (en) | 1997-04-04 | 1999-07-13 | Vector Magnetics, Inc. | Method for near field electromagnetic proximity determination for guidance of a borehole drill |
| US6573722B2 (en) * | 2000-12-15 | 2003-06-03 | Schlumberger Technology Corporation | Method and apparatus for cancellation of borehole effects due to a tilted or transverse magnetic dipole |
| AR037955A1 (es) * | 2001-12-20 | 2004-12-22 | Halliburton Energy Serv Inc | Sistema y metodo para medir la resistividad a traves de la envoltura |
| US6819110B2 (en) * | 2002-03-26 | 2004-11-16 | Schlumberger Technology Corporation | Electromagnetic resistivity logging instrument with transverse magnetic dipole component antennas providing axially extended response |
| US6924646B2 (en) * | 2002-12-31 | 2005-08-02 | Schlumberger Technology Corporation | System and method for locating a fracture in an earth formation |
| US7202670B2 (en) * | 2003-08-08 | 2007-04-10 | Schlumberger Technology Corporation | Method for characterizing a subsurface formation with a logging instrument disposed in a borehole penetrating the formation |
| JP3968442B2 (ja) | 2004-12-07 | 2007-08-29 | 防衛省技術研究本部長 | 船体方位概定装置 |
| US7812610B2 (en) * | 2005-11-04 | 2010-10-12 | Schlumberger Technology Corporation | Method and apparatus for locating well casings from an adjacent wellbore |
| US7617049B2 (en) * | 2007-01-23 | 2009-11-10 | Smith International, Inc. | Distance determination from a magnetically patterned target well |
| US9121967B2 (en) * | 2007-08-31 | 2015-09-01 | Baker Hughes Incorporated | Method and apparatus for well-bore proximity measurement while drilling |
| CA2700732A1 (en) * | 2007-10-19 | 2009-04-23 | Shell Internationale Research Maatschappij B.V. | Cryogenic treatment of gas |
| US8773278B2 (en) * | 2007-12-21 | 2014-07-08 | Schlumberger Technology Corporation | Apparatus for receiving and transmitting signals in electromagnetic telemetry system used in a wellbore |
| WO2009151867A2 (en) * | 2008-06-13 | 2009-12-17 | Schlumberger Canada Limited | Multiple magnetic sensor ranging method and system |
| WO2010006052A2 (en) * | 2008-07-10 | 2010-01-14 | Schlumberger Canada Limited | System and method for generating true depth seismic surveys |
| US8427162B2 (en) * | 2008-08-25 | 2013-04-23 | Baker Hughes Incorporated | Apparatus and method for detection of position of a component in an earth formation |
| US9291739B2 (en) * | 2008-11-20 | 2016-03-22 | Schlumberger Technology Corporation | Systems and methods for well positioning using a transverse rotating magnetic source |
| US8322462B2 (en) * | 2008-12-22 | 2012-12-04 | Halliburton Energy Services, Inc. | Proximity detection system for deep wells |
| US8113298B2 (en) * | 2008-12-22 | 2012-02-14 | Vector Magnetics Llc | Wireline communication system for deep wells |
| US9035657B2 (en) * | 2009-04-10 | 2015-05-19 | Schlumberger Technology Corporation | Electromagnetic logging between a cased borehole and surface |
| US8638103B2 (en) * | 2009-04-10 | 2014-01-28 | Schlumberger Technology Corporation | Electromagnetic logging between borehole and surface |
| KR101043098B1 (ko) | 2009-12-18 | 2011-06-21 | 연세대학교 산학협력단 | 물체까지의 거리 측정 장치 및 방법, 이를 구비한 로봇 |
| US9932818B2 (en) * | 2010-11-17 | 2018-04-03 | Halliburton Energy Services, Inc. | Apparatus and method for drilling a well |
| MX2013005519A (es) * | 2010-11-19 | 2013-07-05 | Schlumberger Technology Bv | Instrumento de registro de agujero abierto y metodo para hacer mediciones magneticas y de resistividad uiltra profundas. |
| US20120139530A1 (en) * | 2010-12-07 | 2012-06-07 | Smith International, Inc. | Electromagnetic array for subterranean magnetic ranging operations |
| US9328597B2 (en) * | 2011-04-07 | 2016-05-03 | Electro-Petroleum, Inc. | Electrode system and sensor for an electrically enhanced underground process |
| WO2013003516A2 (en) * | 2011-06-28 | 2013-01-03 | Schlumberger Canada Limited | Modified triaxial antenna array |
| US9151150B2 (en) * | 2012-10-23 | 2015-10-06 | Baker Hughes Incorporated | Apparatus and methods for well-bore proximity measurement while drilling |
| AU2013354973B2 (en) * | 2012-12-07 | 2016-11-17 | Halliburton Energy Services, Inc. | Gradient-based single well SAGD ranging system |
| WO2014089402A2 (en) * | 2012-12-07 | 2014-06-12 | Halliburton Energy Services Inc. | Surface excitation ranging system for sagd application |
| US9091785B2 (en) * | 2013-01-08 | 2015-07-28 | Halliburton Energy Services, Inc. | Fiberoptic systems and methods for formation monitoring |
| US20140191761A1 (en) * | 2013-01-08 | 2014-07-10 | Halliburton Energy Services, Inc. ("HESI") | Fiberoptic Systems and Methods for Subsurface EM Field Monitoring |
| CN105164553B (zh) * | 2013-06-13 | 2018-04-13 | 哈利伯顿能源服务公司 | 使用调制信号的测距 |
| WO2015005924A1 (en) * | 2013-07-11 | 2015-01-15 | Halliburton Energy Services, Inc. | Rotationally-independent wellbore ranging |
| US10294773B2 (en) * | 2013-12-23 | 2019-05-21 | Halliburton Energy Services, Inc. | Method and system for magnetic ranging and geosteering |
| US10119389B2 (en) * | 2013-12-27 | 2018-11-06 | Halliburton Energy Services, Inc. | Drilling collision avoidance apparatus, methods, and systems |
| CA2930529C (en) * | 2013-12-27 | 2018-06-05 | Halliburton Energy Services, Inc. | Target well ranging method, apparatus, and system |
| WO2015102578A1 (en) * | 2013-12-30 | 2015-07-09 | Halliburton Energy Services, Inc. | Ranging using current profiling |
| AU2015253516B2 (en) * | 2014-05-01 | 2018-02-01 | Halliburton Energy Services, Inc. | Casing segment having at least one transmission crossover arrangement |
| US9951605B2 (en) * | 2014-07-16 | 2018-04-24 | Halliburton Energy Services, Inc. | Optimized SAGD well placement utilizing temperature and electromagnetic measurements |
| US9874085B2 (en) * | 2014-08-11 | 2018-01-23 | Halliburton Energy Services, Inc. | Well ranging apparatus, systems, and methods |
| US9638028B2 (en) * | 2014-08-27 | 2017-05-02 | Schlumberger Technology Corporation | Electromagnetic telemetry for measurement and logging while drilling and magnetic ranging between wellbores |
| WO2016054059A1 (en) * | 2014-10-01 | 2016-04-07 | Applied Technologies Associates, Inc | Well completion with single wire guidance system |
| US10100634B2 (en) * | 2015-09-18 | 2018-10-16 | Baker Hughes, A Ge Company, Llc | Devices and methods to communicate information from below a surface cement plug in a plugged or abandoned well |
-
2013
- 2013-12-27 US US14/432,647 patent/US10119389B2/en active Active
- 2013-12-27 WO PCT/US2013/078120 patent/WO2015099790A1/en active Application Filing
- 2013-12-27 CA CA2930531A patent/CA2930531C/en active Active
- 2013-12-27 GB GB1606925.4A patent/GB2534748B/en not_active Expired - Fee Related
- 2013-12-27 RU RU2016115367A patent/RU2647530C2/ru not_active IP Right Cessation
- 2013-12-27 AU AU2013408734A patent/AU2013408734B2/en not_active Ceased
-
2014
- 2014-12-17 AR ARP140104711A patent/AR098791A1/es active IP Right Grant
-
2016
- 2016-04-26 SA SA516371012A patent/SA516371012B1/ar unknown
- 2016-05-11 NO NO20160793A patent/NO20160793A1/en not_active Application Discontinuation
Patent Citations (7)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US5218301A (en) * | 1991-10-04 | 1993-06-08 | Vector Magnetics | Method and apparatus for determining distance for magnetic and electric field measurements |
| US5589775A (en) * | 1993-11-22 | 1996-12-31 | Vector Magnetics, Inc. | Rotating magnet for distance and direction measurements from a first borehole to a second borehole |
| US20030076107A1 (en) * | 2001-08-03 | 2003-04-24 | Baker Hughes Incorporated | Method and apparatus for a multi-component induction instrument measuring system for geosteering and formation resistivity data interpretation in horizontal, vertical and deviated wells |
| US20060113112A1 (en) * | 2004-11-30 | 2006-06-01 | General Electric Company | Method and system for precise drilling guidance of twin wells |
| US20090308657A1 (en) * | 2008-06-13 | 2009-12-17 | Schlumberger Technology Corporation | Magnetic ranging and controlled earth borehole drilling |
| US20110139507A1 (en) * | 2009-12-10 | 2011-06-16 | Baker Hughes Incorporated | Method and Apparatus for Borehole Positioning |
| WO2012009375A1 (en) * | 2010-07-13 | 2012-01-19 | Vector Magnetics Llc | Electromagnetic orientation system for deep wells |
Also Published As
| Publication number | Publication date |
|---|---|
| WO2015099790A1 (en) | 2015-07-02 |
| GB2534748B (en) | 2018-11-14 |
| US20160265343A1 (en) | 2016-09-15 |
| AR098791A1 (es) | 2016-06-15 |
| US10119389B2 (en) | 2018-11-06 |
| CA2930531C (en) | 2019-03-12 |
| NO20160793A1 (en) | 2016-05-11 |
| SA516371012B1 (ar) | 2021-03-02 |
| CA2930531A1 (en) | 2015-07-02 |
| AU2013408734A1 (en) | 2016-05-12 |
| GB2534748A (en) | 2016-08-03 |
| RU2016115367A (ru) | 2017-10-25 |
| AU2013408734B2 (en) | 2017-06-22 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| RU2647530C2 (ru) | Устройство, способ и система для избеганий столкновений при бурении | |
| US10584576B2 (en) | Well ranging apparatus, systems, and methods | |
| US8618803B2 (en) | Well location determination apparatus, methods, and systems | |
| US9890629B2 (en) | Method and apparatus for optimizing magnetic signals and detecting casing and resistivity | |
| US9869172B2 (en) | Downhole multi-pipe scale and corrosion detection using conformable sensors | |
| RU2661943C1 (ru) | Вращение и ориентация магнитного датчика относительно бурового инструмента | |
| US10119394B2 (en) | Multi-frequency dielectric borehole imager | |
| US9341053B2 (en) | Multi-layer sensors for downhole inspection | |
| US9360584B2 (en) | Systems and methodology for detecting a conductive structure | |
| US9933543B2 (en) | Downhole inspection, detection, and imaging using conformable sensors | |
| NL1041915B1 (en) | Passive ranging using acoustic energy originating from a target wellbore | |
| AU2015378541B2 (en) | Downhole electrode apparatus, systems, and methods | |
| US11467316B2 (en) | Technologies for in-situ calibration of magnetic field measurements | |
| US10684386B2 (en) | Method and apparatus of near-bit resistivity for looking-ahead |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| MM4A | The patent is invalid due to non-payment of fees |
Effective date: 20201228 |