RU2573773C2 - Device and method for closing of containers - Google Patents
Device and method for closing of containers Download PDFInfo
- Publication number
- RU2573773C2 RU2573773C2 RU2013103781/13A RU2013103781A RU2573773C2 RU 2573773 C2 RU2573773 C2 RU 2573773C2 RU 2013103781/13 A RU2013103781/13 A RU 2013103781/13A RU 2013103781 A RU2013103781 A RU 2013103781A RU 2573773 C2 RU2573773 C2 RU 2573773C2
- Authority
- RU
- Russia
- Prior art keywords
- shell
- containers
- closing
- tilting
- pushing
- Prior art date
Links
Images



Classifications
-
- B—PERFORMING OPERATIONS; TRANSPORTING
- B65—CONVEYING; PACKING; STORING; HANDLING THIN OR FILAMENTARY MATERIAL
- B65B—MACHINES, APPARATUS OR DEVICES FOR, OR METHODS OF, PACKAGING ARTICLES OR MATERIALS; UNPACKING
- B65B7/00—Closing containers or receptacles after filling
- B65B7/16—Closing semi-rigid or rigid containers or receptacles not deformed by, or not taking-up shape of, contents, e.g. boxes or cartons
- B65B7/26—Closing semi-rigid or rigid containers or receptacles not deformed by, or not taking-up shape of, contents, e.g. boxes or cartons by closing hinged lids
Landscapes
- Engineering & Computer Science (AREA)
- Mechanical Engineering (AREA)
- Closures For Containers (AREA)
- Filling Of Jars Or Cans And Processes For Cleaning And Sealing Jars (AREA)
- Supplying Of Containers To The Packaging Station (AREA)
- Vending Machines For Individual Products (AREA)
- Containers And Packaging Bodies Having A Special Means To Remove Contents (AREA)
Abstract
Description
Область техники, к которой относится изобретениеFIELD OF THE INVENTION
Данное изобретение относится к способам закрывания контейнеров того типа, которые можно использовать, например, для вставления так называемых «сюрпризов» в пищевые продукты, такие как шоколадные яйца и т.п.This invention relates to methods for closing containers of the type that can be used, for example, to insert so-called "surprises" into food products such as chocolate eggs and the like.
Вместе с тем ссылку на эту возможную область применения не следует считать ограничивающей объем описания.However, a reference to this possible field of application should not be considered limiting the scope of the description.
Описание предшествующего уровня техникиDescription of the Related Art
Оболочковые контейнеры, включающие в себя первую и вторую чашеобразные полуоболочки, соединяемые друг с другом во взаиморасположении соответствующих горловинных участков, предусматривающем фронтальное сопряжение, известны в многочисленных вариантах осуществления, что подтверждается документами обширной патентной литературы, включая, например, документы WO-A-2005/044677, WO-A-2005/110880 и WO-A-2007/074355. В частности, последние два из упомянутых документов иллюстрируют контейнеры, в которых первая и вторая полуоболочки соединены друг с другом посредством упругого элемента, служащего в качестве шарнира и пригодного для получения разными способами.Shell containers, including the first and second cup-shaped half-shells, connected to each other in the relative position of the neck portions, providing frontal conjugation, are known in numerous embodiments, as evidenced by extensive patent documents, including, for example, documents WO-A-2005 / 044677, WO-A-2005/110880 and WO-A-2007/074355. In particular, the last two of the mentioned documents illustrate containers in which the first and second half-shells are connected to each other by means of an elastic element serving as a hinge and suitable for receiving in various ways.
Общая проблема облегчения эксплуатации таких контейнеров, особенно в том, что касается операций наполнения и закрывания, уже привлекла к себе внимание.The general problem of facilitating the operation of such containers, especially with regard to filling and closing operations, has already attracted attention.
Документы ЕР-А-0631932, ЕР-А-0631933 и ЕР-А-0631934 свидетельствуют о разработках в этом направлении.Documents EP-A-0631932, EP-A-0631933 and EP-A-0631934 testify to developments in this direction.
Среди них документ ЕР-А-0631932 посвящен проблеме соединения двух чашевидных участков, из которых состоит контейнер, соответственно служащих корпусом и крышкой контейнера, в условиях закрывания. Из решения, описанного в ЕР-А-0631932, вытекает, что вышеупомянутое движение закрывания получается в результате движения сближения между двумя участками контейнера, ранее поддерживавшимися в состоянии фронтального выравнивания, при этом часть, служащая в качестве крышки, располагается над частью, служащей в качестве корпуса контейнера.Among them, the document EP-A-0631932 is devoted to the problem of connecting the two cupped sections of which the container consists, respectively serving as the body and the lid of the container, under closing conditions. It follows from the solution described in EP-A-0631932 that the aforementioned closing movement is obtained as a result of the approaching movement between the two portions of the container previously supported in the frontal alignment state, while the part serving as a lid is located above the part serving as container body.
Хотя имеются автоматизированные решения, подобные описанному в раннее упомянутом документе, большинство обычных решений по-прежнему предусматривают, что операцию закрывания осуществляют вручную. Это решение выявляет различные недостатки: во-первых, использование логистики, связанной с фактом заключения в контейнере различных компонентов сюрпризов и связанной с контейнерами, где операции наполнения и закрывания проводятся перед возвратом закрытых и наполненных контейнеров в места их использования. Кроме того, ручная операция не обеспечивает гарантию совершенного контроля качества.Although there are automated solutions similar to those described in the previously mentioned document, most conventional solutions still provide that the closing operation is carried out manually. This decision reveals various shortcomings: firstly, the use of logistics related to the fact that the container contains various components of surprises and related to containers, where filling and closing operations are carried out before returning closed and filled containers to their places of use. In addition, manual operation does not guarantee perfect quality control.
Задача и сущность изобретенияOBJECT AND SUMMARY OF THE INVENTION
Таким образом, возникает потребность в замене ручных операций операциями, которые можно проводить автоматически, чтобы облегчить интеграцию с местами использования при достижении преимущества, заключающегося в превращении способов и времен осуществления их операций в полностью определимые и воспроизводимые.Thus, there is a need to replace manual operations with operations that can be carried out automatically to facilitate integration with places of use, while achieving the advantage of turning the methods and times of their operations into completely definable and reproducible.
Данное изобретение имеет целью предоставление ответа на такие потребности в связи с операцией закрывания оболочкообразного контейнера.The present invention aims to provide an answer to such needs in connection with the operation of closing the shell-shaped container.
В соответствии с данным изобретением такая задача решается благодаря устройству, имеющему отличительные признаки, конкретно указанные в формуле изобретения.In accordance with this invention, this problem is solved by a device having the distinguishing features specifically specified in the claims.
Изобретение также относится к соответствующему способу. Формула изобретения образует неотъемлемую часть предложенного здесь технического описания в связи с изобретением.The invention also relates to a corresponding method. The claims form an integral part of the technical description provided herein in connection with the invention.
Краткое описание прилагаемых чертежейBrief description of the attached drawings
Теперь изобретение будет описано, исключительно посредством неограничительного примера, со ссылками на прилагаемые чертежи, включающие фиг. 1-5, отображающие конструкцию и последовательные рабочие этапы согласно варианту осуществления.The invention will now be described solely by way of non-limiting example, with reference to the accompanying drawings, including FIG. 1-5 depicting a structure and sequential steps according to an embodiment.
Подробное описание вариантов осуществленияDetailed Description of Embodiments
В нижеследующем описании, с целью обеспечить углубленное понимание вариантов осуществления, иллюстрируются различные конкретные подробности. Варианты осуществления могут быть получены и без одной или нескольких конкретных подробностей или посредством других способов, компонентов, материалов и т.д. В других случаях подробное описание конструкций, материалов или операций не показано или не приведено во избежание неясности в различных аспектах вариантов осуществления.In the following description, in order to provide an in-depth understanding of the embodiments, various specific details are illustrated. Embodiments may be obtained without one or more specific details or by other methods, components, materials, etc. In other cases, a detailed description of the structures, materials or operations is not shown or not given in order to avoid ambiguity in various aspects of the embodiments.
Ссылка на «вариант осуществления» в этом описании указывает, что конкретная конфигурация, конструкция или характеристика, описываемая в связи с описываемым вариантом осуществления, присутствует по меньшей мере в одном варианте осуществления. Следовательно, такие выражения, как «в варианте осуществления», возможно присутствующие в различных частях этого описания, необязательно относятся к одному и тому же варианту осуществления. Помимо этого конкретные конфигурации, конструкции или характеристики можно объединять любым подходящим образом в одном или нескольких вариантах осуществления.A reference to an “embodiment” in this description indicates that a particular configuration, design, or characteristic described in connection with the described embodiment is present in at least one embodiment. Therefore, expressions such as “in an embodiment”, possibly present in various parts of this description, do not necessarily refer to the same embodiment. In addition, specific configurations, structures, or characteristics may be combined in any suitable manner in one or more embodiments.
Приводимые здесь позиции используются лишь для того, чтобы облегчить работу читателя, и поэтому они не являются ограничивающими объем защиты или диапазон вариантов осуществления.The positions given here are used only to facilitate the work of the reader, and therefore they are not limiting the scope of protection or the range of embodiments.
Данное подробное описание относится к устройству 10, которое можно использовать для закрывания оболочкового контейнера С того типа, который обычно называют «бочонком».This detailed description relates to a
В разных вариантах осуществления устройство 10 само по себе пригодно для работы даже лишь с одним контейнером С зараз.In various embodiments, the
Вместе с тем, различные варианты осуществления предусматривают, что устройство 10 способно работать одновременно с несколькими контейнерами С, параллельными друг другу: в вариантах осуществления, представленных на чертежах, устройство 10 работает параллельно с группами контейнеров С, включающими в себя контейнеры в количестве N, равном 5. Различные варианты осуществления дают возможность параллельной работы с контейнерами, количество N которых отличается от 5.At the same time, various embodiments provide that the
В примерах, рассматриваемых здесь, в пределах оболочкообразного контейнера С можно различить две полуоболочки С1 и С2 с бочкообразными элементами и колпачными концевыми участками.In the examples discussed here, within the shell-shaped container C, two half-shells C1 and C2 with barrel-shaped elements and cap end portions can be distinguished.
Из соображений краткости, такие полуоболочки в нижеследующем тексте далее будут именоваться «корпусом» (полуоболочка С1) и «крышкой» (полуоболочка С2).For brevity reasons, such half-shells in the following text will hereinafter be referred to as the “body” (half-shell C1) and the “cover” (half-shell C2).
Это различие используется лишь для простоты описания. В случае иллюстрируемого здесь бочонка С корпус С1 имеет поверхность юбки (термин «поверхность юбки» употребляется здесь для того, чтобы указать боковую поверхность, примыкающую к контуру горловины корпуса С1), с протяженностью, большей, чем у поверхности юбки крышки С2. В разных вариантах осуществления соотношения размеров, о которых идет речь, могут быть разными (например, эти две поверхности юбок могут быть идентичными друг другу). При этом также учитывается тот факт, что контейнер С может иметь форму, отличающуюся от формы, иллюстрируемой здесь, например такую, как овальная форма (или форма хвостовика), сферическая форма, призматическая форма, цилиндрическая форма и т.д.This distinction is used only for ease of description. In the case of the barrel C illustrated here, the body C1 has a skirt surface (the term “skirt surface” is used here to indicate a side surface adjacent to the neckline of the body C1), with a length greater than that of the surface of the cover skirt C2. In different embodiments, the size ratios in question may be different (for example, the two surfaces of the skirts may be identical to each other). It also takes into account the fact that the container C may have a shape different from the shape illustrated here, for example, such as an oval shape (or shape of a shank), a spherical shape, a prismatic shape, a cylindrical shape, etc.
Кроме того, в представленных здесь примерах корпус С1 и крышка С2 соединены друг с другом гибким элементом С3, служащим в качестве шарнира. Шарнир С3 также пригоден для изготовления в соответствии с разными способами: см., например, ранее упоминавшиеся документы WO-A-2005/110880 и WO-A-2007/074355.In addition, in the examples presented here, the housing C1 and the cover C2 are connected to each other by a flexible element C3 serving as a hinge. The hinge C3 is also suitable for manufacture in accordance with various methods: see, for example, the previously mentioned documents WO-A-2005/110880 and WO-A-2007/074355.
В вариантах осуществления рассматриваемых здесь, корпус С1 имеет воротниковую часть С12, а соединение крышки С2 с корпусом С1 получают в результате вставления воротниковой части С12 (которая выступает из края горловины корпуса С1) в горловинную часть крышки С2.In the embodiments discussed here, the housing C1 has a collar portion C12, and the connection of the cover C2 to the housing C1 is obtained by inserting the collar portion C12 (which protrudes from the neck of the housing C1) into the neck portion of the cover C2.
В разных вариантах осуществления, устройство 10 включает в себя один или более блоков 12, каждый из которых включает в себя одну или более полостей 14, предназначенных для приема в них корпусов С1 контейнеров С.In various embodiments, the
В варианте осуществления, рассматриваемом здесь, блоки 12 расположены в «поездной» конструкции, которая пересекает устройство 10 по траектории продвижения, являющейся в основном горизонтальной, и - применительно к рассматриваемым здесь вариантам осуществления - движется справа налево. Естественно, ссылка на эту возможную движущуюся конфигурацию сделана полностью в целях приведения примера того, что, например, блоки 12 могут переноситься другой транспортной конструкцией или могут быть встроены в нее, например, это может быть конструкция поворотного стола. Кроме того, ссылка на траекторию движения с постоянным направлением транспортировки сделана лишь для приведения примера, в котором блок или блоки 12 можно перемещать попеременно.In the embodiment discussed here, the
Варианты осуществления, рассматриваемые здесь, обеспечивают использование нескольких блоков 12, каждый из которых снабжен (в соответствии с конфигурацией, в целом аналогичной головке цилиндра двигателя внутреннего сгорания) некоторым количеством полостей 14, равным 5. Очевидно, что любое или каждое тело 12 может включать в себя отличающееся количество полостей 14.The embodiments discussed here provide for the use of
Полости 14 воспроизводят - приблизительно дополняющим образом - конфигурацию корпуса С1 контейнера С, вследствие чего в них можно заключать корпусы С1 контейнеров С. Вставление корпусов С1 контейнеров С в соответствующие удерживающие конструкции, образуемые полостями 14, предусмотренными в блоке или блоках 12, можно осуществлять посредством автоматического устройства, такого как робот, которое не показано на чертежах, но - в идеальном случае - может быть расположено в нижней правой (применительно к точке обзора чертежей) части.The
В разных вариантах осуществления конфигурация полостей 14 (из соображений простоты, в нижеследующем тексте - при увязке с чертежами - будет сделана ссылка на наличие нескольких блоков 12, каждый из которых снабжен множеством полостей 14) такова, что при вставлении внутрь соответствующей полости 14, служащей в качестве удерживающей конструкции, корпус С1 контейнера С немного выступает относительно полости 14.In various embodiments, the configuration of the cavities 14 (for reasons of simplicity, in the following text, when linked to the drawings, reference will be made to the presence of
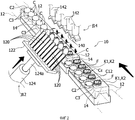
В разных вариантах осуществления (предназначенных для закрывания контейнеров С, при котором соединение корпуса С1 и крышки С2 получают благодаря посадке воротниковой части С12, выступающей из края горловины корпуса С1, в горловинной части крышки С2) полости 14 выполнены таким образом, что когда корпус С1 вставлен в полость 14, воротниковая часть С12 выступает почти полностью из полости 14, как схематически проиллюстрировано в нижней правой части фиг. 1.In various embodiments (intended for closing containers C, in which the connection of the body C1 and the cover C2 is obtained by fitting the collar portion C12 protruding from the edge of the neck of the body C1 in the neck of the cover C2), the
В варианте осуществления, не являющемся исключительным, размеры полостей 14 позволяют подвергать их - применительно к вставляемым в них корпусам С1 - «сильному» фиксирующему воздействию: иными словами, каждый корпус С1 вставляют с противодействием (т.е. «сажают с натягом») в полость 14, служащую в качестве удерживающей конструкции.In a non-exclusive embodiment, the dimensions of the
Как видно при рассмотрении нижней правой части чертежей, иллюстрирующих состояние, в котором контейнеры С - открытые продвигаются к закрывающему устройству 10, корпус С1 и крышка С2 каждого контейнера С расположены бок о бок друг относительно друга, при этом края их горловин по существу копланарны и почти касаются в области шарнирного крепления, представленной шарниром С3, причем воротниковая часть С12 корпуса С1 выступает относительно общей плоскости пролегания краев горловины корпуса С1 и крышки С2, по меньшей мере в целом ограниченной верхней плоскостью тела 12.As you can see when considering the lower right side of the drawings, illustrating the state in which containers C - open are moving towards the
В иллюстрируемых вариантах осуществления, которые следует понимать как примеры, предполагалось, что контейнеры С, по мере продвижения к устройству 10, предварительно наполнялись (при работе обычным образом) так, что в них содержались:In the illustrated embodiments, which should be understood as examples, it was assumed that the containers C, as they move to the
- листок F (он может быть, например, листком, содержащим инструкции для сборки «сюрприза», вставленного в контейнер С), сложенный и/или свернутый для формирования приблизительно трубчатой формы;- a leaflet F (it can be, for example, a leaflet containing instructions for assembling a “surprise” inserted in container C) folded and / or folded to form an approximately tubular shape;
- узел или участки K1, К2 и т.д. маленькой игрушки или развлекательной принадлежности, предназначенной для вставления внутрь контейнера С.- node or sections K1, K2, etc. a small toy or entertainment item designed to be inserted inside container C.
Листок F можно вставлять, например, в соответствии с решением, описанным в патентной заявке на изобретение, поданной в тот же день тем же заявителем.Leaflet F can be inserted, for example, in accordance with the decision described in the patent application for the invention filed on the same day by the same applicant.
В различных вариантах осуществления корпус С1 контейнера С может быть по меньшей мере частично деформирован посредством незначительного смятия (овализации) горловинной части для облегчения введения изделий K1, К2 и т.д.In various embodiments, the container body C1 of the container C can be at least partially deformed by slightly crushing (ovulating) the neck portion to facilitate insertion of articles K1, K2, etc.
Как видно на различных чертежах (можно сослаться, в частности, на нижнюю правую часть их), единственный или каждый блок 12 служит в качестве несущего тела, в котором предусмотрены одна или несколько конструкций (полостей 14), каждая из которых выполнена с возможностью размещения в ней первой полуоболочки С1 одного из контейнеров С со второй оболочкой С2, шарнирно прикрепленной (в шарнире С3) к первой полуоболочке и свободно выступающей из одной стороны несущего тела 12.As can be seen in the various drawings (in particular, the lower right part can be referred to), a single or each
Контейнеры С вставлены в полости 14 блоков 12 так, что корпус С1 и крышка С2 расположены рядом друг с другом, причем края их горловин приблизительно копланарны, т.е. расположены в общей плоскости (горизонтальной в рассматриваемом здесь примере), приблизительно обозначенной посредством плоской верхней поверхности блоков 12. Таким образом, края горловин полуоболочек С1 и С2 являются приблизительно касательными друг относительно друга в зоне шарнирного крепления, представленной шарниром С3, при этом воротниковая часть С12 выступает относительно общей плоскости пролегания краев горловин корпуса С1 и крышки С2.The containers C are inserted into the
В различных вариантах осуществления операция закрывания контейнеров С требует вмешательства двух устройств 112 и 114, в дальнейшем - из соображений краткости - именуемых «кантующим устройством» (устройство 112) и «устройством окончательного закрывания» (устройство 114).In various embodiments, the operation of closing the containers C requires the intervention of two
Таким образом, как упоминалось прежде, варианты осуществления, иллюстрируемые здесь, предусматривают, что устройство 10 работает одновременно с контейнерами С в количестве N, равном 5. В иллюстрируемых примерах как кантующее устройство 112, так и устройство 114 окончательного закрывания имеют соответствующее количество активных элементов (пальцев 120 кантующего устройства и прижимных элементов 140 устройства 114, которые будут подробнее рассмотрены ниже).Thus, as previously mentioned, the embodiments illustrated here provide that the
Если устройство 10 предназначено для работы одновременно с контейнерами С, количество которых отличается от пяти, то количество таких активных элементов можно изменять. В нижеследующем описании ссылки будут делаться главным образом на способы манипулирования лишь одним контейнером С, но понятно, что эти ссылки можно распространить и на количество N, практически бесконечное, контейнеров С.If the
В вариантах осуществления, иллюстрируемых здесь, активные элементы или пальцы 120 кантующего устройства 112 - во всей их полноте - образуют конструкцию, которую можно назвать гребне- или вилкообразной. Пальцы 120 простираются, начинаясь от общей опорной плиты 122, несомой штоком 124а исполнительного механизма 124, и выполнены с возможностью сближения с блоком 12 и отдаления от этого блока, который в текущий момент выровнен с устройством 10 (в соответствии со способами, подробнее описываемыми ниже) под управлениям блока К управления, например такого, как персональный компьютер для промышленного применения, который также контролирует работу устройства 114 окончательного закрывания.In the embodiments illustrated here, the active elements or
Пальцы 120 установлены на плите 122 таким образом, что когда исполнительный механизм 124 продвигает плиту 122 к блоку 12, находящемуся в текущий момент перед устройством 112 (см., например, последовательность фиг. 2-3), каждый из пальцев 120, взаимодействуя с одним соседним пальцем 120, оканчивается сверху с каждой стороны на крышке С2 одного из контейнеров С, вставленных в полости 14 тела 12, о котором идет речь.The
При наличии количества N контейнеров С, предназначенных для одновременного манипулирования ими, можно предусмотреть N пар пальцев 120 (по паре пальцев для каждого из N контейнеров С), установленных на плите 122, и поэтому в совокупности получается 2N пальцев 120.In the presence of the number N of containers C intended for simultaneous manipulation of them, it is possible to provide N pairs of fingers 120 (a pair of fingers for each of the N containers C) mounted on the
В разных вариантах осуществления количество пальцев 120 также можно уменьшить, обеспечивая заключение каждого пальца 120 в матрице, установленной на плите 122, за исключением двух пальцев 120 в концевом положении матрицы, для одновременной работы с двумя соседними контейнерами С.Таким образом, каждый из пальцев 120, расположенных во «внутреннем положении» (т.е. не концевом положении) матрицы, должен быть выполнен с возможностью одновременной работы с двумя крышками С2 двух контейнеров С, одновременно забираемых в положение закрывания. В этом случае вместо использования 2N (десять в иллюстрируемом здесь примере) пальцев 120, достаточно будет N+1 пальца для данного случая: это происходит благодаря тому факту, что каждый из пальцев во внутреннем положении матрицы окажется способным одновременно работать с двумя соседними контейнерами С.In various embodiments, the number of
В разных вариантах осуществления такую конфигурацию можно заменить стержнем, форма которого сделана подходящей для приема части (дуги) крышки С2. В такой конфигурации количество стержней (пальцев) может быть равным количеству кантуемых крышек С2.In various embodiments, the implementation of this configuration can be replaced by a rod, the shape of which is made suitable for receiving part (arc) of the cover C2. In this configuration, the number of rods (fingers) may be equal to the number of canted lids C2.
В разных вариантах осуществления траектория продвижения «активной» части кантующего устройства 112 (на практике - в направлении движения вала 124а исполнительного механизма 124) получается вдоль траектории, образующей угол α относительно горизонтального направления (т.е., говоря обобщеннее, относительно общей плоскости пролегания горловинных участков корпуса С1 и крышки С2 контейнеров С, заключенных в полостях 14 блоков 12).In different embodiments, the path of advancement of the “active” part of the overturning device 112 (in practice, in the direction of movement of the
В иллюстрируемых вариантах осуществления (те же самые способы работы могут достигаться даже в случае конструкции или геометрии, имеющей по меньшей мере некоторые отличия), пальцы 120 представляют собой приблизительно цилиндрические тела с дистальным концом, предпочтительно - закругленным,In the illustrated embodiments (the same working methods can be achieved even in the case of a structure or geometry having at least some differences), the
простирающиеся вдоль соответствующих осей, лежащих в общей плоскости, в которой также лежит ось вала 124а исполнительного механизма 124. Эта общая плоскость пролегания (осей) пальцев 120 образует двугранный угол с углом раскрытия, равным α, относительно вышеупомянутой общей плоскости пролегания участков горловин корпусов С1 и крышек С2 контейнеров С, подвергающихся движению закрывания.extending along the respective axes lying in a common plane, in which also lies the axis of the
Движение закрывания контейнеров С получается по существу как результат кантования крышек С2 на корпуса С1, причем такое движение кантования происходит вокруг области шарнирного крепления, идентифицируемой шарниром С3.The closing movement of the containers C is obtained essentially as a result of the tilting of the caps C2 onto the bodies C1, and such a tilting movement occurs around the hinged area identified by the hinge C3.
Это движение кантования достигается благодаря тому факту, что пальцы 120 (или - точнее - дистальные концы пальцев 120) продвигаются к блоку 12, где расположены контейнеры С, посредством движения, которое благодаря углу α наклона имеет:This tilting movement is achieved due to the fact that the fingers 120 (or, more precisely, the distal ends of the fingers 120) advance towards the
- как горизонтальную составляющую, посредством которой пальцы 120 - а в частности, их дистальные концы, - достигают блока 12 на стороне, с которой крышки С2 выступают после кантования,- as a horizontal component, through which the fingers 120 - and in particular their distal ends - reach the
- так и подъемную - снизу вверх - составляющую (обнаруживаемую в вертикальном направлении), вызывающую движение пальцев 120, а в частности их дистальных концов, к верхней плоскости тел 12, т.е. к общей плоскости пролегания краев горловин корпусов С1 и крышек С2, расположенных рядом с ними.- and lifting - from bottom to top - component (detected in the vertical direction), causing the movement of the
Последовательность фиг. 1-3 иллюстрирует способы осуществления вышеупомянутого движения кантования крышек С2 в условиях закрывания на корпусы С1.The sequence of FIG. 1-3 illustrates methods for carrying out the aforementioned tilting movement of covers C2 under conditions of closing onto bodies C1.
В результате срабатывания, вызываемого блоком К, исполнительный механизм 124 (обычно - струйный исполнительный механизм, такой как гидравлический домкрат) активируется, толкая - вперед и вверх - узел (обычно позиционируемый «ниже» контейнеров С, расположенных в блоках 12), образованный плитой 122 и установленными на ней пальцами 120. Продвижение пальцев 120 позволяет дистальным концам пальцев входить в зацепление с крышками С2 (как упоминалось ранее, каждая крышка С2 может быть введена в зацепление с расположенной сверху с каждой стороны на ней парой пальцев 120 (или - как упоминалось прежде - с помощью одиночного стержня надлежащей формы)). Таким образом, крышки С2 поднимаются и кантуются на корпусы С1 за счет поворота этих крышек вокруг центра поворота (точнее, зоны центра поворота), идентифицируемого областью шарнирного крепления крышки С2 к корпусу С1, представленной шарниром С3.As a result of the actuation caused by block K, the actuator 124 (usually a jet actuator, such as a hydraulic jack) is activated by pushing forward and up the assembly (usually positioned “below” containers C located in blocks 12) formed by
В результате такого движения каждая крышка С2 следует в соответствии с движением постепенного кантования вокруг горизонтальной оси, расположенной по существу в области С3 шарнира. Такое движение кантования обуславливает постепенное движение крышки С2 над корпусом С1 контейнера С, причем воротниковая часть С12 корпуса С1 проникает в горловинную часть крышки 2.As a result of this movement, each lid C2 follows in accordance with the movement of gradual tilting around a horizontal axis located essentially in the hinge region C3. Such a tilting movement causes a gradual movement of the lid C2 over the body C1 of the container C, and the collar part C12 of the body C1 penetrates the neck portion of the lid 2.
На фиг. 2 показан промежуточный этап вышеупомянутого движения кантования, при котором край горловины каждой крышки (сначала расположенный в горизонтальной плоскости, общей с плоскостью, в которой лежит край горловины соответствующего корпуса С1), постепенно поворачиваясь вверх, заканчивает подъем, располагаясь в приблизительно вертикальной плоскости. За всем этим потом следует вышеупомянутое движение кантования вплоть до состояния, в котором край горловины крышки С2 оказывается снова находящимся в горизонтальной плоскости, по существу соответствующей общей плоскости пролегания края горловины корпуса С1: однако это конечное - копланарное состояние (с крышкой С2, закрытой на корпусе 1) - достигается после того, как крышка С2 совершает поворот на 180° относительно - начального - копланарного состояния (с крышкой С2, расположенной сбоку корпуса С1), подчиняясь тяговому воздействию, оказываемому дистальными концами пальцев 120.In FIG. 2 shows an intermediate step of the aforementioned tilting movement, in which the edge of the neck of each lid (first located in a horizontal plane common with the plane in which the edge of the neck of the corresponding body C1 lies), gradually turning up, finishes the rise, being located in an approximately vertical plane. All this then follows the aforementioned tilting movement up to a state in which the neck edge of cover C2 is again in a horizontal plane essentially corresponding to the common plane of the edge of the neck of body C1: however, this is the final coplanar state (with cover C2 closed on the body 1) - is achieved after the cover C2 rotates 180 ° relative to the - initial - coplanar state (with cover C2 located on the side of the body C1), subject to the traction provided the distal ends of the
Во время вышеупомянутого движения кантования (опять см. последовательность фиг. 1-3), дистальные концы пары пальцев 120, которые вводятся в зацепление с каждой крышкой С2 позади нее, прикладывают тяговое усилие в положении, в целом эксцентричном относительно полярной области С2. Последовательность фиг. 1-3 показывает, что каждая крышка С2 подвергается тяговому воздействию, оказываемому дистальными концами пальцев 120, прикладываемому к крышке и включающему в себя:During the aforementioned tipping movement (again, see the sequence of FIGS. 1-3), the distal ends of the pair of
- горизонтальную составляющую (действующую слева направо - применительно к точке обзора согласно чертежам), имеющую эффект поступательного перемещения крышки С2 над соответствующим корпусом С1, и- a horizontal component (acting from left to right - in relation to the viewpoint according to the drawings) having the effect of translational movement of the cover C2 over the corresponding housing C1, and
- вертикальную составляющую, которая сначала направлена вверх и которая после обнуления (на практике - приблизительно по достижении положения, представленного на фиг. 2), постепенно обращается вниз, внося нарастающий вклад в тяговое воздействие крышки С2, достигающей корпуса С1 с гарантией вставления воротниковой части С12 в край горловины крышки С2.- the vertical component, which is first directed upward and which, after zeroing (in practice, approximately after reaching the position shown in Fig. 2), gradually turns downward, making an increasing contribution to the traction action of the cover C2 reaching the body C1 with a guarantee of insertion of the collar part C12 to the edge of the neck of the cover C2.
Эксперименты, проведенные заявителем, показывают, что вышеупомянутое движение кантования получается исключительно точным и определенным образом предотвращающим присутствие листа F, а также не дающим компонентам или элементам K1, К2 и т.д., присутствующим в корпусе С1, помешать движению закрывания контейнера С.The experiments conducted by the applicant show that the aforementioned tipping movement is obtained in an extremely accurate and definite way preventing the presence of the sheet F, as well as preventing the components or elements K1, K2, etc. present in the body C1 from interfering with the closing movement of the container C.
Не желая ограничиваться какой-либо конкретной теорией, касающейся рассматриваемого предмета обсуждения, заявитель считает такой результат воспроизводимым конкретно точным и надежным образом, когда - подобно обычно возникающей ситуации - контейнер С выполнен из гибкого материала (например, тонкой пластмассы). В присутствии гибкого материала движение кантования для закрытия крышкой С2 в соответствии с условиями, представленными здесь, вероятно, обеспечивает постепенную упругую деформацию воротниковой части С12 - в смысле по меньшей мере небольшой деформации (или создания овала). Эта деформация начинается, когда воротниковая часть С12 начинает проникновение в горловинную часть крышки С2, и это движение проникновения протекает постепенно (см., в частности, последовательность фиг. 1-3) до тех пор, пока не произойдет его безусловное завершение, когда крышка С2 окажется полностью наложенной, закрывая корпус С1. При этом, тот факт, что каждая крышка С2 «кантуется» парой пальцев 120 матрицы, которые оказывают на крышку С2 воздействие, располагаясь сверху с обеих сторон на ней, гарантирует - даже в присутствии гибкого материала - точную операцию центровки крышки С2 относительно воздействующих на нее пальцев 120.Not wanting to be limited to any specific theory regarding the subject under discussion, the applicant considers such a result to be reproducible in a specifically accurate and reliable way when, like a usual situation, the container C is made of flexible material (for example, thin plastic). In the presence of a flexible material, the tilting movement to close the lid C2 in accordance with the conditions presented here probably provides a gradual elastic deformation of the collar portion C12 - in the sense of at least a slight deformation (or creating an oval). This deformation begins when the collar portion C12 begins to penetrate into the neck portion of the lid C2, and this movement of penetration proceeds gradually (see, in particular, the sequence of Figs. 1-3) until it unconditionally terminates when the lid C2 will be completely superimposed, closing the C1 housing. At the same time, the fact that each cover C2 is “turned over” by a pair of
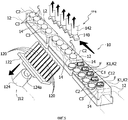
Устройство 114 окончательного закрывания, включающее в себя один или несколько прижимных элементов 140 (количество N которых равно количеству контейнеров С, которые надо закрыть одновременно: N=5 в рассматриваемом здесь примере), которые, сразу же после кантования крышек С2 в положении закрывания на соответствующие корпусы С1 (см. фиг. 3), опускаются сверху вниз одним или несколькими исполнительными элементами 142 (например, гидравлическими струйными исполнительными механизмами, также управляемыми узлом К) с тем, чтобы консолидировать крышки С2 в закрытом положении на корпусах С1.The
Это непосредственное действие при консолидации закрытого состояния контейнеров С может привести к одиночным движениям опускания (см. последовательность фиг. 3-4) или к последовательности происходящих друг за другом движений опускания (например, это может быть движение опускания, повторяемое два или три раза) для обеспечения точного прижима крышек С2 в закрытом состоянии на краях горловин соответствующих корпусов С1 без оставления места для остаточного непреднамеренного отхода.This direct action during consolidation of the closed state of containers C may lead to single lowering movements (see the sequence of Figs. 3-4) or to a sequence of lowering movements occurring one after another (for example, this may be a lowering movement repeated two or three times) for ensure accurate clamping of the covers C2 in the closed state at the edges of the necks of the corresponding housings C1 without leaving room for residual unintentional withdrawal.
В разных вариантах осуществления прижимные элементы 140 обычно являются также вогнутыми, при этом вогнутость обращена к блокам 12, где контейнеры С расположены в закрытом состоянии. В разных вариантах осуществления общее развитие вогнутости может приводить к развитию V- или U-образной вогнутости (раскрывающейся книзу, т.е. в основном к контейнерам С). Эта вогнутая конфигурация также позволяет располагать каждый из прижимных элементов 140 сверху с каждой стороны на крышке С2, которая консолидирована в закрытом положении контейнера С, обеспечивая функцию автоматического центрирования.In various embodiments, the hold-down
По завершении операции закрывания блок К вмешивается в работу кантующего устройства 112 и в работу устройства 114 окончательного закрывания, возвращая первое в отведенное положение (то есть назад и вниз по отношению к состоянию, изображенному на прилагаемых чертежах) и возвращая второе вверх.Upon completion of the closing operation, block K interferes with the operation of the
Все это обеспечивает «поезд» для продвижения блоков 12, что позволяет провести этап продвижения ранее закрытых контейнеров С от устройства 10 и продвижение нового блока 12, содержащего один или несколько новых контейнеров С, которые надо закрыть, к устройству 10.All this provides a "train" for advancing
Помимо этого следует отметить, что операция возврата или «повторного инициирования» устройств 112 и 114 может происходить одновременно или почти одновременно, как представлено здесь в последовательности фиг.4 или 5, либо - на проводимых друг за другом этапах. В частности, можно предусмотреть возврат пальцев 120 кантующего устройства 112 назад и вниз перед опусканием прижимных элементов 140 на контейнерах С.In addition, it should be noted that the operation of the return or “re-initiation” of the
В разных вариантах осуществления кантующее устройство 112 может быть установлено на несущей конструкции (не показанной на чертежах) плавающего типа, т.е. такой, которая обеспечивает заданное движение поворачивания матрицы пальцев 120 вверх или вниз в направлении изменения угла α, представленного на фиг. 1, чтобы обеспечить адаптацию к крышкам С2, имеющим разные формы и размеры. И опять, следует принять во внимание, что контейнеры С могут иметь форму, отличающуюся от формы бочонка, иллюстрируемой здесь, и иметь, например, в основном цилиндрические очертания, многоугольные очертания, подразумеваемые для корпуса С1 и/или крышки С2.In various embodiments, the
Без ущерба для принципа изобретения, в рамках объема притязаний изобретения, определяемого прилагаемой формулой изобретения, его подробности и варианты осуществления могут быть изменены - даже значительно - по отношению к тем, которые описаны здесь исключительно посредством неограничительного примера.Without prejudice to the principle of the invention, within the scope of the claims of the invention defined by the appended claims, its details and embodiments may be changed - even significantly - with respect to those described here solely by way of non-limiting example.
Claims (9)
- несущее тело (12) с удерживающей конструкцией (14) для приема упомянутой первой полуоболочки (С1) по меньшей мере одного из упомянутых контейнеров (С) с упомянутой второй полуоболочкой (С2), шарнирно прикрепленной (С3) к упомянутой первой полуоболочке (С1) и выступающей из одной стороны упомянутого несущего тела (12), и
- кантующий элемент (112), включающий в себя по меньшей мере один толкающий элемент (120), избирательно приводимый в действие для продвижения к упомянутой стороне несущего тела (12) с целью сообщения упомянутой второй полуоболочке (С2), шарнирно прикрепленной (С3) к упомянутой первой полуоболочке (С1), упомянутого движения кантования для закрывания контейнера,
где упомянутый толкающий элемент (120) включает в себя по меньшей мере одну пару толкающих элементов, выполненных с возможностью расположения сверху с одной стороны и с другой стороны упомянутой второй полуоболочки (С2) при осуществлении упомянутого движения кантования.1. A device for closing containers (C) made of flexible material and including the first (C1) and second (C2) cup-shaped half-shells connected by their respective neck sections in a relative position (C12), providing for frontal conjugation as a result of the closing movement of the canting leading to the tilting of said second half-shell (C2), located on the side of said first half-shell (C1), to said first half-shell (C1), including:
- a supporting body (12) with a retaining structure (14) for receiving said first half-shell (C1) of at least one of said containers (C) with said second half-shell (C2) pivotally attached (C3) to said first half-shell (C1) and protruding from one side of said supporting body (12), and
- an overturning element (112), including at least one pushing element (120), selectively actuated to advance to said side of the carrier body (12) to communicate the said second half-shell (C2) pivotally attached (C3) to said first half-shell (C1), said tilting movement for closing the container,
where said pushing element (120) includes at least one pair of pushing elements configured to be arranged on top of one side and on the other side of said second half-shell (C2) during said tilting movement.
- упомянутое несущее тело (12) включает в себя множество удерживающих конструкций (14) для соответствующего множества контейнеров (С), а
- упомянутый кантующий элемент (112) включает в себя матрицу толкающих элементов (120) для взаимодействия с упомянутым множеством контейнеров (С).5. The device according to claim 1 or 2, in which:
- said supporting body (12) includes a plurality of retaining structures (14) for the corresponding plurality of containers (C), and
- said canting element (112) includes a matrix of pushing elements (120) for interacting with said plurality of containers (C).
- располагают упомянутую первую полуоболочку (С1) одного из упомянутых контейнеров (С) в несущем теле (12) с удерживающей конструкцией (14) для первой полуоболочки (С1) с упомянутой второй полуоболочкой (С2), шарнирно прикрепленной (С3) к упомянутой первой полуоболочке (С1), выступающей из одной стороны упомянутого несущего тела (12),
- снабжают кантующий элемент (112) по меньшей мере одним толкающим элементом (120), перемещаемым с продвижением к упомянутой стороне несущего тела (12), и
- продвигают упомянутый по меньшей мере один толкающий элемент (120) к упомянутой стороне несущего тела (12) для сообщения упомянутого движения закрывания кантованием упомянутой второй полуоболочке (С2), шарнирно прикрепленной (С3) к упомянутой первой полуоболочке (С1),
где упомянутый толкающий элемент (120) включает в себя по меньшей мере одну пару толкающих элементов, выполненных с возможностью расположения сверху с одной стороны и с другой стороны упомянутой второй полуоболочки (С2) при осуществлении упомянутого движения кантования. 9. The method of closing containers (C) made of flexible material and including the first (C1) and second (C2) cup-shaped half-shells connected by their respective neck sections in a relative position (C12), which provides for frontal conjugation as a result of the tilting closing movement, leading to the tilting of the said second half-shell (C2), pivotally attached (C3) to the said first half-shell (C1) and located on the side of it, on the said first half-shell (C1), namely:
- positioning said first half-shell (C1) of one of said containers (C) in a carrier body (12) with a retaining structure (14) for a first half-shell (C1) with said second half-shell (C2) pivotally attached (C3) to said first half-shell (C1) protruding from one side of said supporting body (12),
- provide the canting element (112) with at least one pushing element (120), moving with the advancement to the said side of the supporting body (12), and
- promoting said at least one pushing member (120) to said side of the carrier body (12) for communicating said closing movement by tilting said second half-shell (C2) pivotally attached (C3) to said first half-shell (C1),
where said pushing element (120) includes at least one pair of pushing elements configured to be arranged on top of one side and on the other side of said second half-shell (C2) during said tilting movement.
Applications Claiming Priority (3)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| ITTO2010A000560A IT1401207B1 (en) | 2010-06-30 | 2010-06-30 | DEVICE AND PROCEDURE FOR CLOSING CONTAINERS |
| ITTO2010A000560 | 2010-06-30 | ||
| PCT/IB2011/052717 WO2012001581A1 (en) | 2010-06-30 | 2011-06-21 | Device and method for closing containers |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| RU2013103781A RU2013103781A (en) | 2014-08-10 |
| RU2573773C2 true RU2573773C2 (en) | 2016-01-27 |
Family
ID=43740416
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| RU2013103781/13A RU2573773C2 (en) | 2010-06-30 | 2011-06-21 | Device and method for closing of containers |
Country Status (10)
| Country | Link |
|---|---|
| EP (1) | EP2588375B1 (en) |
| CN (1) | CN102958807B (en) |
| ES (1) | ES2542004T3 (en) |
| HU (1) | HUE026570T2 (en) |
| IT (1) | IT1401207B1 (en) |
| MD (1) | MD4528C1 (en) |
| MX (1) | MX2012014930A (en) |
| PL (1) | PL2588375T3 (en) |
| RU (1) | RU2573773C2 (en) |
| WO (1) | WO2012001581A1 (en) |
Families Citing this family (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| LT2854768T (en) | 2012-05-30 | 2017-06-12 | Fresenius Kabi Oncology Limited | Pharmaceutical compositions of pemetrexed |
| CA3053922C (en) * | 2017-02-24 | 2023-11-14 | Csp Technologies, Inc. | Adapter, bottling line arrangement including the same, and method of filling and sealing in a bottling line using a bottling line arrangement |
| JP6831739B2 (en) * | 2017-04-03 | 2021-02-17 | 川崎重工業株式会社 | Lid closing device and lid closing method |
Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2909880A (en) * | 1955-07-26 | 1959-10-27 | Fmc Corp | Carton closing machine |
| US3518811A (en) * | 1968-08-20 | 1970-07-07 | Mobil Oil Corp | Egg carton closing apparatus |
| US4612752A (en) * | 1985-09-30 | 1986-09-23 | R. J. Reynolds Tobacco Company | Carton flap folding assembly for cigarette cartons |
| RU2044675C1 (en) * | 1991-04-11 | 1995-09-27 | Тетра Лавал Холдингз энд Файнэнс С.А. | Method of and device for sealing packs for liquids |
| US5551210A (en) * | 1995-03-31 | 1996-09-03 | Williamson; Robert L. | Machine for packaging product |
Family Cites Families (9)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US4672797A (en) * | 1985-06-21 | 1987-06-16 | Gatan, Inc. | Method and apparatus for securing and transferring grid specimens |
| US5177936A (en) * | 1991-11-14 | 1993-01-12 | Alpha Enterprises, Inc. | Machine and method for loading a cassette into a security package |
| IT1260880B (en) | 1993-06-29 | 1996-04-29 | Ferrero Spa | FEEDING DEVICE FOR FALL, FOR EXAMPLE FOR FILLING CONTAINERS, AND RELATED PROCEDURE |
| IT1260882B (en) | 1993-06-29 | 1996-04-29 | Ferrero Spa | DEVICE FOR THE ASSEMBLY OF CONTAINERS AND RELATED PROCEDURE |
| IT1260881B (en) | 1993-06-29 | 1996-04-29 | Ferrero Spa | DEVICE FOR COLLECTING PIECES FROM A CONTAINMENT VOLUME, FOR EXAMPLE FOR FILLING CONTAINERS AND RELATED PROCEDURE |
| SI1529731T1 (en) | 2003-11-06 | 2011-11-30 | Magic Production Group M P G S A | A container for gifts |
| PT1604911E (en) * | 2004-05-18 | 2013-08-02 | Magic Production Group M P G S A | Hinged container produced in one piece |
| WO2007074355A1 (en) | 2005-11-16 | 2007-07-05 | Magic Production Group (M.P.G.) Sa | Surprise container |
| ITMO20050338A1 (en) * | 2005-12-16 | 2007-06-17 | Green Pack S R L | EQUIPMENT FOR PACKAGING PRODUCTS |
-
2010
- 2010-06-30 IT ITTO2010A000560A patent/IT1401207B1/en active
-
2011
- 2011-06-21 RU RU2013103781/13A patent/RU2573773C2/en active
- 2011-06-21 ES ES11738304.2T patent/ES2542004T3/en active Active
- 2011-06-21 CN CN201180032196.7A patent/CN102958807B/en not_active Expired - Fee Related
- 2011-06-21 PL PL11738304T patent/PL2588375T3/en unknown
- 2011-06-21 HU HUE11738304A patent/HUE026570T2/en unknown
- 2011-06-21 MX MX2012014930A patent/MX2012014930A/en active IP Right Grant
- 2011-06-21 MD MDA20120133A patent/MD4528C1/en not_active IP Right Cessation
- 2011-06-21 WO PCT/IB2011/052717 patent/WO2012001581A1/en active Application Filing
- 2011-06-21 EP EP11738304.2A patent/EP2588375B1/en not_active Not-in-force
Patent Citations (5)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US2909880A (en) * | 1955-07-26 | 1959-10-27 | Fmc Corp | Carton closing machine |
| US3518811A (en) * | 1968-08-20 | 1970-07-07 | Mobil Oil Corp | Egg carton closing apparatus |
| US4612752A (en) * | 1985-09-30 | 1986-09-23 | R. J. Reynolds Tobacco Company | Carton flap folding assembly for cigarette cartons |
| RU2044675C1 (en) * | 1991-04-11 | 1995-09-27 | Тетра Лавал Холдингз энд Файнэнс С.А. | Method of and device for sealing packs for liquids |
| US5551210A (en) * | 1995-03-31 | 1996-09-03 | Williamson; Robert L. | Machine for packaging product |
Also Published As
| Publication number | Publication date |
|---|---|
| CN102958807B (en) | 2015-07-22 |
| MD4528C1 (en) | 2018-06-30 |
| IT1401207B1 (en) | 2013-07-12 |
| MD4528B1 (en) | 2017-11-30 |
| CN102958807A (en) | 2013-03-06 |
| RU2013103781A (en) | 2014-08-10 |
| HUE026570T2 (en) | 2016-06-28 |
| ITTO20100560A1 (en) | 2011-12-31 |
| ES2542004T3 (en) | 2015-07-29 |
| MX2012014930A (en) | 2013-02-26 |
| EP2588375B1 (en) | 2015-04-08 |
| PL2588375T3 (en) | 2015-08-31 |
| EP2588375A1 (en) | 2013-05-08 |
| WO2012001581A1 (en) | 2012-01-05 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| RU2573773C2 (en) | Device and method for closing of containers | |
| GB2473731A (en) | Slide-open package of tobacco articles, and relative production method | |
| CN105252541A (en) | Bottle clamping mechanical arm | |
| EP0283347A1 (en) | Tubes for the storage of pills, tablets on similar articles with a reserve box | |
| EP2210730A1 (en) | Bottle for containing fluids, particularly cosmetic, medical, pharmaceutical products or the like | |
| MX2020007332A (en) | Method for producing a beverage using a portion pack, and portion pack. | |
| EP1441968B1 (en) | Rigid container for tobacco articles, with rounded or beveled transverse and longitudinal edges | |
| EP3156344B1 (en) | Wrapping method and unit to fold a blank designed to form a container, so as to manufacture a box-shaped front wall and two box-shaped lateral walls of a hinged lid of the container | |
| US20090107347A1 (en) | Egg breaker | |
| WO2003064264A3 (en) | A divice for filling soluble containers | |
| WO2005094196A3 (en) | Folding and unfolding type cap | |
| EP1197436B1 (en) | Method and machine for securing objects in a container with a rectangular or square cross-section | |
| EP2620272B1 (en) | Unit for picking-up a tubular blank in a flattened configuration and for opening out the tubular blank, boxing machine comprising the unit. | |
| US20130165307A1 (en) | Unit For Picking Up A Tubular Container In A Flattened Configuration, For Opening Out The Tubular Container And For Transferring The Tubular Container Towards A Receiving Station Of The Tubular Container | |
| EP2588378A1 (en) | Device and method for filling containers | |
| EP2776321A1 (en) | A packing method for producing a hinged-lid, slide-open package of tobacco articles with a sealing flap | |
| JP4202141B2 (en) | Device for deriving individual objects from a sequence of objects | |
| CN214499796U (en) | High-density sealing sleeve for high-speed punch press | |
| CN105638811B (en) | A kind of device that can realize that spring roll is faric and its faric method | |
| EP2817232B1 (en) | Rigid packet of cigarettes | |
| US2479994A (en) | Machine for setting up cellular cartons | |
| EP0378491B1 (en) | Device for dewinging poultry | |
| CN202880097U (en) | Hard unscrewed cigarette bag | |
| CN207888486U (en) | A kind of multi-functional dismantling tong for crossed joint clamp spring and wave case clamp spring | |
| KR20190010649A (en) | Apparatus for collecting containers in a flat form and deploying the containers |