RU2503558C2 - Temperature controller of automatic combined microprocessor-based heat machine with blower electric drive - Google Patents
Temperature controller of automatic combined microprocessor-based heat machine with blower electric drive Download PDFInfo
- Publication number
- RU2503558C2 RU2503558C2 RU2011152637/11A RU2011152637A RU2503558C2 RU 2503558 C2 RU2503558 C2 RU 2503558C2 RU 2011152637/11 A RU2011152637/11 A RU 2011152637/11A RU 2011152637 A RU2011152637 A RU 2011152637A RU 2503558 C2 RU2503558 C2 RU 2503558C2
- Authority
- RU
- Russia
- Prior art keywords
- compressor
- pneumatic system
- pressure
- microprocessor
- air
- Prior art date
Links
- 230000003068 static effect Effects 0.000 claims abstract description 19
- 230000001105 regulatory effect Effects 0.000 claims description 16
- 238000012937 correction Methods 0.000 claims description 11
- 238000004804 winding Methods 0.000 abstract description 29
- 230000006698 induction Effects 0.000 abstract description 9
- 230000000694 effects Effects 0.000 abstract description 4
- 239000000126 substance Substances 0.000 abstract 1
- 230000007423 decrease Effects 0.000 description 11
- 230000033228 biological regulation Effects 0.000 description 10
- 238000010586 diagram Methods 0.000 description 10
- 230000003137 locomotive effect Effects 0.000 description 8
- 230000005540 biological transmission Effects 0.000 description 6
- 239000000314 lubricant Substances 0.000 description 6
- 230000001360 synchronised effect Effects 0.000 description 6
- 238000012360 testing method Methods 0.000 description 4
- 238000012546 transfer Methods 0.000 description 4
- 238000000034 method Methods 0.000 description 3
- 238000005096 rolling process Methods 0.000 description 3
- 108010039224 Amidophosphoribosyltransferase Proteins 0.000 description 2
- 230000009471 action Effects 0.000 description 2
- 238000004364 calculation method Methods 0.000 description 2
- 230000008859 change Effects 0.000 description 2
- 230000001276 controlling effect Effects 0.000 description 2
- 230000003247 decreasing effect Effects 0.000 description 2
- 238000013461 design Methods 0.000 description 2
- 239000000446 fuel Substances 0.000 description 2
- 238000011089 mechanical engineering Methods 0.000 description 2
- 230000009467 reduction Effects 0.000 description 2
- 230000007704 transition Effects 0.000 description 2
- 238000004642 transportation engineering Methods 0.000 description 2
- 241000282326 Felis catus Species 0.000 description 1
- 230000001133 acceleration Effects 0.000 description 1
- 238000013459 approach Methods 0.000 description 1
- 230000008878 coupling Effects 0.000 description 1
- 238000010168 coupling process Methods 0.000 description 1
- 238000005859 coupling reaction Methods 0.000 description 1
- 239000002283 diesel fuel Substances 0.000 description 1
- 230000005284 excitation Effects 0.000 description 1
- 238000009434 installation Methods 0.000 description 1
- 230000007246 mechanism Effects 0.000 description 1
- 230000008569 process Effects 0.000 description 1
Images





Landscapes
- Control Of Positive-Displacement Pumps (AREA)
Abstract
Description
Область техники, к которой относится изобретениеFIELD OF THE INVENTION
Предлагаемое изобретение относится к области совершенствования поршневых компрессорных установок тягового подвижного состава, например дизельного тягового подвижного состава, на котором компрессоры приводятся от теплового двигателя. На дизельном тяговом подвижном составе применяются следующие приводы компрессоров: механический неотключаемый от главного теплового двигателя; электрический; гидродинамический с регулируемой муфтой; гидродинамический с нерегулируемой муфтой; привод от вспомогательного теплового двигателя (неотключаемый) [Тепловозы. Конструкция, теория и расчет./ Под ред. Н.И.Панова. - М.: Машиностроение, 1976. - 544 с.].The present invention relates to the field of improving reciprocating compressor units of traction rolling stock, for example, diesel traction rolling stock, on which the compressors are driven by a heat engine. The following compressor drives are used on diesel traction rolling stock: mechanical non-disconnectable from the main heat engine; electric; hydrodynamic with adjustable clutch; hydrodynamic with an unregulated coupling; drive from auxiliary heat engine (non-disconnectable) [Diesel locomotives. Design, theory and calculation. / Ed. N.I. Panova. - M.: Mechanical Engineering, 1976. - 544 p.].
Эксплуатация компрессорных установок на локомотивах значительно отличается от эксплуатации их в стационарных условиях. Из-за специфики поездной работы, конструкционных особенностей локомотивов и типов привода компрессоров это отличие характеризуется переменными скоростью вращения вала, давлением нагнетания, температурными условиями, частыми пусками и остановками или сменами рабочего и холостого хода [Шарунин А.А. Эксплуатационные испытания локомотивных компрессоров ПК-35 и ПК-3,5.Труды ЦНИИ МПС, 1970, Вып.413].The operation of compressor units on locomotives is significantly different from their operation in stationary conditions. Due to the specifics of train work, the design features of locomotives and types of compressor drives, this difference is characterized by variable shaft speeds, discharge pressure, temperature conditions, frequent starts and stops or changes of working and idling [Sharunin A.A. Operational tests of locomotive compressors PK-35 and PK-3,5. Trudy TsNII MPS, 1970, Issue 413].
Известно, что из всех применяемых способов изменения подачи Q2 и давления pк компрессоров способ изменения их путем изменения скорости вращения вала компрессора ωк является наиболее эффективным. Однако, для поддержания давления воздуха ркв пневматической системе тягового транспортного средства широко применяются релейные автоматические системы регулирования давления (АСРД), в которых функции исполнительно-регулирующих устройств (ИРУ), т.е. исполнительных механизмов (ИМ) в совокупности с регулирующими органами (РО), выполняют привод компрессора и собственно компрессор. Сама пневматическая система тягового транспортного средства является объектом регулирования давления (ОРД). Автоматический регулятор давления (АРД) содержит, кроме исполнительно-регулирующего устройства, еще управляющий орган (УО), состоящий из измерительного устройства (ИУ), задающего (ЗУ), сравнивающего (СУ) и усилительно-преобразующего устройств [Луков Н.М. Космодамианский А.С. Автоматические системы управления локомотивов. - М.: ГОУ «Учебно-методический центр по образованию на железнодорожном транспорте», 2007, с.342-343]. На объект регулирования давления ОРД действуют внешние возмущающие воздействия λ1, λ2 и λ3: расход воздуха из пневматической системы Q1, температура Та и давление рa атмосферного (всасываемого) воздуха. Изменения этих возмущающих воздействий приводят к изменениям регулируемой величины φ - давления рк [Пластинин П.И. Поршневые компрессоры. Т. 1. Теория и расчет. - М.: КолосС, 2006. - с.114-119]. Для поддержания давления pк в заданном диапазоне автоматический регулятор давления изменяет подачу воздуха Q2 в пневматическую систему. Автоматический релейный двухпозиционный регулятор давления имеет статические характеристики в виде петли (см. фиг.1. Статические характеристики автоматического релейного двухпозиционного регулятора давления) при максимальной ωк1 и минимальной ωк2 частоте вращения вала компрессора. При работе автоматической системы регулирования давления величина рк изменяется в пределах от рк1 до рк2. Повышение давления рк от рк1 до рк2 осуществляется при работе компрессора с максимальной скоростью вращения вала ωк макс и максимальной подачей Q2 макс. При этом наблюдается максимальная скорость износа деталей цилиндро-поршневой группы компрессора и увеличенный расход смазки. [Банников В.А., Маньшин А.П. Влияние режимов работы компрессоров на износ деталей цилиндро-поршневой группы и расход смазки. - Коломна, Труды ВНИТИ, 1983, Вып.58]. Результаты испытаний показывают, что скорость износа деталей компрессора возрастает как с увеличением ωк, так и с увеличением рк, причем более сильное влияние на увеличение скорости износа оказывает давление рк [Цыкунов Ю.И. Результаты испытаний на износ компрессоров ПК-35 и ПК-3,5. - М.: НИИИНФОРМТЯЖМАШ, Транспортное машиностроение, 1968, Вып.13]. С повышением ωк и давления нагнетания рк расход смазки увеличивается [Банников В.А., Маньшин А.П. Влияние режимов работы компрессоров на износ деталей цилиндро-поршневой группы и расход смазки. - Коломна, Труды ВНИТИ, 1983, Вып.58]. Для уменьшения износа деталей цилиндро-поршневой группы компрессора и уменьшения расхода смазки необходимо применять плавное регулирование давления рк наиболее эффективным способом - изменением ωк, при котором уменьшается время работы компрессора при ωк макс и рк макс. Анализ свойств автоматических регуляторов давления релейного двухпозиционного и непрерывного действия показывает, что при непрерывном регулировании давления компрессор работает больше времени при пониженной ωк и пониженном рк, что способствует уменьшению скорости износа деталей цилиндро-поршневой группы и уменьшению расхода смазки (стоимость которой на порядок выше стоимости дизельного топлива) [Цыкунов Ю.И., Лесин В.И. Результаты испытаний опытных образцов локомотивных компрессоров ПК-3,5 и ПК-1,75. - М.: НИИИнформТяжМаш, Транспортное машиностроение, 1968, Вып.5-67-14].It is known that of all the methods used to change the supply Q 2 and pressure p to compressors, the method of changing them by changing the speed of rotation of the compressor shaft ω k is the most effective. However, to maintain air pressure p k in the pneumatic system of a traction vehicle, relay automatic pressure control systems (ASRD) are widely used, in which the functions of executive-control devices (IRA), i.e. executive mechanisms (IM) in conjunction with regulatory authorities (RO), perform the drive of the compressor and the compressor itself. The pneumatic system of the traction vehicle itself is an object of pressure regulation (ARD). The automatic pressure regulator (ARD) contains, in addition to the executive-regulating device, a control body (UO), consisting of a measuring device (IU), a master (ZU), a comparing (SU) and an amplifier-converting device [N. Lukov Kosmodamiansky A.S. Automatic control systems for locomotives. - M .: GOU "Educational and methodological center for education in railway transport", 2007, p.342-343]. The external disturbing influences λ 1 , λ 2 and λ 3 act on the pressure regulating object of the pressure regulator: air flow from the pneumatic system Q 1 , temperature T a and atmospheric (intake) air pressure p a . Changes in these disturbing effects lead to changes in the controlled variable φ - pressure p k [PI Plastinin Piston compressors. T. 1. Theory and calculation. - M .: KolosS, 2006. - p.114-119]. To maintain the pressure p k in a given range, an automatic pressure regulator changes the air supply Q 2 to the pneumatic system. Automatic relay on-off pressure regulator has static characteristics in the form of a loop (see figure 1. Static characteristics of an automatic relay on-off pressure regulator) at maximum ω k1 and minimum ω k2 compressor shaft speed. In operation, the automatic pressure regulating system for the value of p varies from p to p k1 k2. The increase in pressure p k from p k1 to p k2 is carried out during operation of the compressor with a maximum shaft rotation speed ω to max and a maximum supply of Q 2 max . At the same time, the maximum wear rate of parts of the cylinder-piston group of the compressor and increased lubricant consumption are observed. [Bannikov V.A., Manshin A.P. The influence of compressor operating modes on the wear of cylinder-piston group parts and lubricant consumption. - Kolomna, Proceedings of VNITI, 1983, Iss. 58]. The test results show that the wear rate of the compressor parts increases both with an increase in ω k and with an increase in p k , and the pressure p k has a stronger effect on the increase in the wear rate [Tsykunov Yu.I. Wear test results for PK-35 and PK-3,5 compressors. - M.: NIIINFORMTYAZHMASH, Transport Engineering, 1968, Issue 13]. With increasing ω to and the discharge pressure p to the lubricant consumption increases [Bannikov V.A., Manshin A.P. The influence of compressor operating modes on the wear of cylinder-piston group parts and lubricant consumption. - Kolomna, Proceedings of VNITI, 1983, Iss. 58]. To reduce the wear of the parts of the cylinder-piston group of the compressor and to reduce the consumption of lubricant, it is necessary to apply smooth regulation of the pressure p to the most effective way - by changing ω k , at which the compressor running time decreases at ω k max and p k max . Analysis of the properties of automatic regulators pressure relay-off and continuous shows that with continuous compressor pressure regulation operates longer at a lower ω k and reduced p k, which contributes to a reduction of wear and tear of cylinder-piston group and a decrease in lubricant flow rate (the value of which is much higher the cost of diesel fuel) [Tsykunov Yu.I., Lesin V.I. Test results of prototypes of locomotive compressors PK-3.5 and PK-1.75. - M .: NIIInformTyazhMash, Transport Engineering, 1968, Issue 5-67-14].
Уровень техникиState of the art
Известна автоматическая система регулирования давления [Патент РФ №2254249], в которой вал компрессора соединен с валом асинхронного двигателя, статорная обмотка которого подключена к синхронному генератору, приводимому от вала теплового двигателя, а роторная обмотка посредством выпрямителя подключена к якорной обмотке регулирующей машины постоянного тока, обмотка возбуждения которой соединена с первым блоком управления, соединенным с первым цифроаналоговым преобразователем, подключенным к первому выходу микропроцессорногоконтроллера, к первому входу которого посредством первого аналого-цифрового преобразователя подключен датчик давления в пневматической системе, а ко второму входу микропроцессорного контроллера посредством второго аналого-цифрового преобразователя подключен датчик скорости вращения вала компрессора, второй выход микропроцессорного контроллера посредством второго цифроаналогового преобразователя соединен с блоком управления контактора подключения асинхронного двигателя к синхронному генератору, а третий выход микропроцессорного контроллера посредством третьего цифроаналогового преобразователя соединен с блоком управления тяговым транспортным средством.Known automatic pressure control system [RF Patent No. 2254249], in which the compressor shaft is connected to the shaft of the induction motor, the stator winding of which is connected to a synchronous generator driven by the shaft of the heat engine, and the rotor winding is connected to the anchor winding of the DC regulating machine, the field winding of which is connected to the first control unit connected to the first digital-to-analog converter connected to the first output of the microprocessor control RA, the pressure sensor in the pneumatic system is connected to the first input of which by means of the first analog-to-digital converter, and the compressor shaft speed sensor is connected to the second input of the microprocessor controller, the second output of the microprocessor controller is connected to the control unit via the second digital-to-analog converter contactor connecting an induction motor to a synchronous generator, and the third output of a microprocessor control Ller through the third digital-to-analog converter is connected to the control unit of the traction vehicle.
Известны асинхронные многоскоростные двигатели с короткозамкнутым ротором, в которых статорная обмотка имеет полюсопереключаемые обмотки:Known asynchronous multi-speed motors with squirrel-cage rotor, in which the stator winding has pole-switched windings:
1. Для двухскоростных двигателей: р=5:3, ω1=600 и ω2=1000 об/мин [А.с. СССР №995212]; р=12:3, ω1=250 и ω2=1000 об/мин [А.с. СССР №1721731]; р=8:4, ω1=375 и ω2=750 об/мин [Патент РФ №2345463].1. For two-speed engines: p = 5: 3, ω 1 = 600 and ω 2 = 1000 rpm [A.S. USSR No. 995212]; p = 12: 3, ω 1 = 250 and ω 2 = 1000 rpm [A.S. USSR No. 1721731]; p = 8: 4, ω 1 = 375 and ω 2 = 750 rpm [RF Patent No. 2345463].
2. Для трехскоростных двигателей: р=5:2:1, ω1=600, ω2=1500 об/мин и ω3=3000 об/мин [А.с. СССР №884039]; р=10:4:2, ω1=300, ω2=750 об/мин и ω3=1500 об/мин [А.с. СССР №1086511]; р=5:2:1, ω1=600, ω2=1500 об/мин и ω3=3000 об/мин [Патент РФ №2285994]; р=7:5:3, ω1=430, ω2=600 об/мин и ω3=1000 об/мин [Патент РФ №2298273].2. For three-speed engines: p = 5: 2: 1, ω 1 = 600, ω 2 = 1500 rpm and ω 3 = 3000 rpm [A. S. USSR No. 884039]; p = 10: 4: 2, ω 1 = 300, ω 2 = 750 rpm and ω 3 = 1500 rpm [A. S. USSR No. 1086511]; p = 5: 2: 1, ω 1 = 600, ω 2 = 1,500 rpm and ω 3 = 3,000 rpm [RF Patent No. 2285994]; p = 7: 5: 3, ω 1 = 430, ω 2 = 600 rpm and ω 3 = 1000 rpm [RF Patent No. 2298273].
3. Для четырехскоростных двигателей: р=8:4:2:1, ω1=375, ω2=750 об/мин, ω3=1500 об/мин и ω4=3000 об/мин [Патент РФ №2014711]; р=8:4:2:1, ω1=375, ω2=750 об/мин, ω3=1500 об/мин и ω4=300 об/мин [Патент РФ №2020693].3. For four-speed engines: p = 8: 4: 2: 1, ω 1 = 375, ω 2 = 750 rpm, ω 3 = 1500 rpm and ω 4 = 3000 rpm [RF Patent No. 20144711] ; p = 8: 4: 2: 1, ω 1 = 375, ω 2 = 750 rpm, ω 3 = 1500 rpm and ω 4 = 300 rpm [RF Patent No. 2020693].
Известны также пятискоростные двигатели, для которых: р=10:6:4:3:2, ω1=300, ω2=500 об/мин, ω3=750 об/мин, ω4=1000 об/мин и ω5=1500 об/мин.Five-speed engines are also known for which: p = 10: 6: 4: 3: 2, ω 1 = 300, ω 2 = 500 rpm, ω 3 = 750 rpm, ω 4 = 1000 rpm and ω 5 = 1500 rpm
Таким образом, имеется возможность широкого выбора трехфазных полюсопереключаемых обмоток для многоскоростных асинхронных двигателей.Thus, there is the possibility of a wide selection of three-phase pole-switchable windings for multi-speed asynchronous motors.
Аналог предлагаемого изобретения, наиболее близкий к нему по совокупности существенных признаков (прототип)The analogue of the invention, the closest to it in the aggregate of essential features (prototype)
Известна автоматическая система регулирования давления в пневматической системе тягового транспортного средства [Патент РФ №2283252], содержащая компрессор, соединенный с валом регулирующей машины постоянного тока, отличающаяся тем, что вал компрессора соединен с валом асинхронного двигателя, статорная обмотка которого подключена к источнику переменного тока, а роторная обмотка посредством выпрямителя подключена к якорной обмотке регулирующей машины постоянного тока, обмотка возбуждения которой соединена с первым блоком управления, подключенным к первому выходу микропроцессорного контроллера, к первому входу которого подключен датчик давления в пневматической системе, а ко второму входу микропроцессорного контроллера подключен датчик скорости вращения вала компрессора, второй выход микропроцессорного контроллера соединен с блоком управления контактора подключения асинхронного двигателя к синхронному генератору, а третий выход микропроцессорного контроллера соединен с блоком управления тяговым транспортным средством.A known automatic pressure control system in the pneumatic system of a traction vehicle [RF Patent No. 2283252], comprising a compressor connected to a shaft of a DC regulating machine, characterized in that the compressor shaft is connected to a shaft of an induction motor, the stator winding of which is connected to an AC source, and the rotor winding by means of a rectifier is connected to the anchor winding of the regulating DC machine, the excitation winding of which is connected to the first control unit, connected to the first output of the microprocessor controller, the pressure sensor in the pneumatic system is connected to the first input of the compressor, and the compressor shaft speed sensor is connected to the second input of the microprocessor controller, the second output of the microprocessor controller is connected to the control unit of the contactor connecting the asynchronous motor to the synchronous generator, and the third output the microprocessor controller is connected to the control unit of the traction vehicle.
Эта автоматическая система регулирования давления в пневматической системе тягового транспортного средства, так же, как и аналог предлагаемого изобретения [Патент РФ №2254249], имеет существенный недостаток. Применение в системе асинхронного двигателя с фазным ротором, вращающегося выпрямителя и машины постоянного тока очень усложняет электрический привод компрессора, повышает стоимость и снижает его надежность и КПД.This automatic pressure control system in the pneumatic system of the traction vehicle, as well as the analogue of the present invention [RF Patent No. 2254249], has a significant drawback. The use in the system of an asynchronous engine with a phase rotor, a rotating rectifier and a DC machine greatly complicates the electric drive of the compressor, increases the cost and reduces its reliability and efficiency.
Сущность изобретенияSUMMARY OF THE INVENTION
Предлагаемая автоматическая комбинированная микропроцессорная система регулирования давления в пневматической системе тягового транспортного средства не имеет недостатков, присущих известным автоматическим системам регулирования давления [Патенты РФ №№2254249, 2283252], так как она содержит автоматический комбинированный релейный восьмипозиционный микропроцессорный регулятор давления с электрическим приводом компрессора, который содержит асинхронный полюсопереключаемый четырехскоростной двигатель с короткозамкнутым ротором, в котором статорная обмотка имеет полюсопереключаемые обмотки (число пар полюсов двигателя: 8, 4, 2 и 1).The proposed automatic combined microprocessor-based pressure control system in the pneumatic system of a traction vehicle does not have the disadvantages inherent in known automatic pressure control systems [RF Patents No. 2254249, 2283252], since it contains an automatic combined eight-position relay microprocessor-based pressure regulator with an electric compressor drive, which contains an asynchronous pole-switched four-speed squirrel-cage motor in a cat The stator winding has pole switchable windings (the number of pairs of motor poles: 8, 4, 2 and 1).
Недостатки автоматического релейного регулятора можно значительно уменьшить путем превращения его из двухпозиционного в многопозиционный. Чем больше позиций имеет релейный регулятор, тем больше релейная система регулирования с таким регулятором приближается к системе непрерывного действия по показателям качества работы.The disadvantages of an automatic relay controller can be significantly reduced by converting it from on-off to multiposition. The more positions a relay controller has, the more a relay control system with such a controller approaches a continuous system in terms of performance.
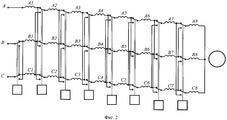
В этом асинхронном полюсопереключаемом двигателе трехфазная обмотка статора выполнена из 24 катушечных групп с выводами от их начал и концов. Коммутационные переключатели катушечных групп (7 трехполюсных переключателей и один двухполюсный переключатель) соединяют катушечные группы так, что они образуют на расточке статора двигателя фазные зоны с целым числом катушек на зону (см. фиг.2. Принципиальная схема асинхронного полюсопереключаемого четырехскоростного двигателя с короткозамкнутым ротором с переключателями катушечных групп статорной обмотки).In this asynchronous pole-switched motor, the three-phase stator winding is made up of 24 coil groups with leads from their beginnings and ends. The switching switches of the coil groups (7 three-pole switches and one two-pole switch) connect the coil groups so that they form phase zones on the motor stator bore with an integer number of coils per zone (see Fig. 2. Schematic diagram of an asynchronous pole-switched four-speed squirrel-cage motor with a squirrel-cage rotor switches of stator winding coil groups).
При подаче трехфазного напряжения на входные зажимы обмотки последняя создает в воздушном зазоре магнитное поле, первая пространственная гармоника которого вращается в одном и том же направлении с частотой вращения, зависящей от числа пар полюсов. В зависимости от положения переключателей угловая скорость поля равна 375 об/мин при включении на 8 пар полюсов, 750 об/мин - при включении на 4 пары полюсов, 1500 об/мин - при включении на 2 пары полюсов и 3000 об/мин - при включении на одну пару полюсов. Таким образом, статорная обмотка обеспечивает ступенчатое изменение частоты вращения магнитного поля в отношении ω1:ω2:ω3:ω4=8:4:2:1.When a three-phase voltage is applied to the input terminals of the winding, the latter creates a magnetic field in the air gap, the first spatial harmonic of which rotates in the same direction with a frequency of rotation depending on the number of pole pairs. Depending on the position of the switches, the angular velocity of the field is 375 rpm when turned on for 8 pairs of poles, 750 rpm when turned on for 4 pairs of poles, 1500 rpm when turned on for 2 pairs of poles and 3000 rpm when inclusion on one pair of poles. Thus, the stator winding provides a stepwise change in the frequency of rotation of the magnetic field in relation to ω 1 : ω 2 : ω 3 : ω 4 = 8: 4: 2: 1.
Эта трехфазная полюсопереключаемая обмотка на четыре числа пар полюсов (двухслойная, трехзонная, соединенная в звезду с одной параллельной ветвью в каждой фазе при всех числах пар полюсов) состоит из одинаковых равномерно распределенных катушек, входящих в катушечные группы с номерами А1 - А8, В1 - В8, С1 - С8. При указанном на фиг.2 исходном положении переключателей схема подготовлена для включения обмотки на 8 пар полюсов (подвижные контакты переключателей катушечных групп расположены вверху), а включение производится подачей трехфазного напряжения на входные зажимы обмотки, обозначенные буквами А, В и С.This three-phase pole-switched winding for four numbers of pole pairs (two-layer, three-zone, connected to a star with one parallel branch in each phase for all numbers of pole pairs) consists of the same uniformly distributed coils included in the coil groups with numbers A1 - A8, B1 - B8 , C1 - C8. With the initial position of the switches indicated in Fig. 2, the circuit is prepared to turn on the winding by 8 pairs of poles (the moving contacts of the coil group switches are located at the top), and switching on is performed by applying a three-phase voltage to the input terminals of the winding indicated by the letters A, B and C.
В предлагаемой автоматической комбинированной микропроцессорной системе регулирования давления в пневматической системе тягового транспортного средства электрический привод компрессора имеет более высокую надежность, так как компрессор включается в работу только на первой передаче, обеспечивающей пониженную частоту вращения компрессора ωк, например, 0,125 номинального значения. Затем следующее увеличение частоты вращения компрессора ωк при переходе с первой на вторую частоту вращения (0,25 номинального значения) также небольшое и осуществляется без предварительного выключения компрессора. Увеличение частоты вращения ωк при переходе со второй на третью частоту вращения (0,5 номинального значения) также небольшое и осуществляется без предварительного выключения компрессора. Эти условия обуславливают пониженные динамические нагрузки в элементах привода компрессора и значительное повышение его надежности. Применение пониженных частот вращения компрессора обеспечивает значительное уменьшение затрат энергии на привод компрессора, повышение надежности привода и компрессора и уменьшение амплитуды и частоты колебаний давления рк, что приводит к уменьшению расхода топлива тяговым транспортным средством и к повышению надежности компрессорной установки.In the proposed automatic combined microprocessor system for regulating the pressure in the pneumatic system of a traction vehicle, the electric drive of the compressor has higher reliability, since the compressor is activated only in first gear, which provides a reduced compressor speed ω to , for example, 0.125 of the nominal value. Then, the next increase in the compressor speed ω k during the transition from the first to the second speed (0.25 of the nominal value) is also small and is carried out without first turning off the compressor. The increase in the rotation frequency ω k during the transition from the second to the third rotation frequency (0.5 of the nominal value) is also small and is carried out without first turning off the compressor. These conditions cause reduced dynamic loads in the compressor drive elements and a significant increase in its reliability. The use of lower compressor rotation speeds provides a significant reduction in energy costs for compressor drive, increase the reliability of the drive and compressor and decrease the amplitude and frequency of pressure fluctuations p k , which leads to a decrease in fuel consumption by a traction vehicle and to increase the reliability of a compressor installation.
Автоматический комбинированный микропроцессорный регулятор давления в пневматической системе тягового транспортного средства с электрическим приводом компрессора (см. фиг.3. Принципиальная блок-схема автоматического комбинированного микропроцессорного регулятора давления в пневматической системе тягового транспортного средства) содержит датчик 1 давления воздуха (ДДВ1) в пневматической системе, датчик 2 расхода воздуха (ДРВ) из пневматической системы Q1, датчик 3 температуры атмосферного (всасываемого) воздуха (ДТВ) и датчик 4 давления атмосферного (всасываемого) воздуха (ДДВ2), компрессор (К) 5, тепловой двигатель 6, синхронный генератор (источник электроэнергии) 7, микропроцессорный контроллер (МПК) 8, асинхронный четырехскоростной двигатель с полюсопереключаемой статорной обмоткой, содержащей 24 катушечных группы: А1 - А8, В1 -В8 и С1 - С8, соединенных с восемью переключателями 9-16, подвижные контактные группы которых имеют приводы 17-24, переключатель 25 включения двигателя с приводом 26, ротор 27 двигателя.An automatic combined microprocessor pressure regulator in the pneumatic system of a traction vehicle with an electric compressor drive (see Fig. 3. A schematic block diagram of an automatic combined microprocessor pressure regulator in a pneumatic system of a traction vehicle) contains an air pressure sensor (DDV1) in the pneumatic system, air flow sensor (DRV) from the pneumatic system Q 1 , atmospheric (intake) air temperature (DTV)
Автоматический микропроцессорный шестипозиционный регулятор давления с механическим приводом компрессора является комбинированным, так как в нем для управления исполнительно-регулирующим устройством кроме сигнала регулируемого величины φ - давления рк, используются еще сигналы внешних возмущающих воздействий λ1, λ2 и λ3: расхода воздуха из пневматической системы Q1, температуры атмосферного (всасываемого) воздуха Та, давления атмосферного (всасываемого) воздуха ра. В результате регулирующее воздействие µ на объект регулирования определяется выражением (алгоритмом работы комбинированного регулятора температуры) [Луков Н.М. Основы автоматики и автоматизации тепловозов. - М.: Транспорт, 1989, стр.19. Луков И.М., А.С.Космодамианский. Автоматические системы управления локомотивов. - М.: ГОУ УМЦ по образованию на ж.-д. транспорте, стр.22].An automatic microprocessor six-position pressure regulator with a mechanical drive of the compressor is combined, because in it, in addition to a signal of adjustable magnitude φ - pressure p k, the signals of external disturbing influences λ 1 , λ 2 and λ 3 : air flow from pneumatic system Q 1 , the temperature of the atmospheric (intake) air T a , the pressure of the atmospheric (intake) air p a . As a result, the regulatory effect of µ on the regulatory object is determined by the expression (the algorithm of the combined temperature controller) [Lukov N.M. Fundamentals of automation and automation of diesel locomotives. - M.: Transport, 1989, p. 19. Lukov I.M., A.S. Kosmodamiansky. Automatic control systems for locomotives. - M .: GOU UMTS by education on the railway. transport, p.22].
![]()
![]()
где kp, kpλ1, kpλ2, kpλ3 - коэффициенты передачи регулятора по каналам действия регулируемой величины и возмущающих воздействий.where k p , k pλ1 , k pλ2 , k pλ3 are the transfer coefficients of the controller through the channels of action of the controlled variable and disturbing influences.
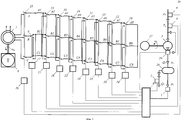
Автоматическая комбинированная микропроцессорная система регулирования давления в пневмосистеме тягового транспортного средства (см. фиг.4. Принципиальная схема автоматической комбинированной микропроцессорной системы регулирования давления в пневматической системе тягового транспортного средства) содержит датчик 1 давления воздуха ДДВ1 в пневматической системе 28, датчик 2 расхода воздуха ДРВ из пневматической системы, датчик 3 температуры атмосферного (всасываемого) воздуха ДТВ и датчик 4 давления атмосферного (всасываемого) воздуха ДДВ2, компрессор 5, тепловой двигатель 6, синхронный генератор (источник электроэнергии) 7, микропроцессорный контроллер МПК 8, асинхронный четырехскоростной двигатель с полюсопереключаемой статорной обмоткой, содержащей 24 катушечных группы: А1-А8, В1-В8 и С1-С8, соединенных с восемью переключателями 9-16, подвижные контактные группы которых имеют приводы 17-24, переключатель 25 включения двигателя с приводом 26, ротор 27 двигателя, пневматическую систему 28, разгрузочное устройство (РУ) 29 с приводом.The automatic combined microprocessor-based pressure control system in the pneumatic system of a traction vehicle (see Fig. 4. Schematic diagram of an automatic combined microprocessor-controlled pressure control system in the pneumatic system of a traction vehicle) contains a DDV1
Автоматическая комбинированная микропроцессорная система регулирования давления в пневматической системе тягового транспортного средства, содержащая автоматический комбинированный релейный восьмипозиционный микропроцессорный регулятор давления с электрическим приводом компрессора, содержит следующие функциональные элементы (см. фиг.5. Функциональная схема автоматической комбинированной микропроцессорной системы регулирования давления в пневматической системе тягового транспортного): объект регулирования давления в пневматической системе ОР 28 (пневматическую систему тягового транспортного средства), первое измерительное устройство (ИУ1) 1 (датчик давления рк воздуха в пневматической системе) с выходным сигналом xд1, второе измерительное устройство (ИУ2) 2 (датчик расхода Q1 воздуха из пневматической системы) с выходным сигналом хд2, третье измерительное устройство (ИУЗ) 3 (датчик температуры Та атмосферного (всасываемого) воздуха) с выходным сигналом хд3, четвертое измерительное устройство (ИУ4) 4 (датчик давления атмосферного (всасываемого) воздуха ра) с выходным сигналом,хд4, регулирующий орган (РО) 5 (компрессор К), исполнительный механизм (ИМ) 30 с выходным сигналом hим (электрический привод компрессора ПК), четыре задающих устройства 31, 32, 33 и 34 - (ЗУ1), (ЗУ2), (ЗУ3) и (ЗУ4) с сигналами задания η1, η2, η3, и с выходными сигналами xзу1, хзу2 и хзу3, четыре сравнивающих устройства 35, 36, 37 и 38 - (СУ1), (СУ2), (СУ3) и (СУ4) с выходными сигналами Δхсу1, ΔДхсу2, Δхсу3 и Δхсу4, два устройства коррекции 39 и 40 (УК1) и (УК2) статических характеристик измерительных устройств ИУ2 и ИУ3 с выходными сигналами хук1 и хук2, устройство суммирования 41 (УС) с выходным сигналом хус выходных сигналов сравнивающих устройств СУ1, СУ2, СУ3 и СУ4, разгрузочное устройство 29 РУи управляющее 42 (УУ) с выходным сигналом хуу.An automatic combined microprocessor-based pressure control system in a pneumatic system of a traction vehicle, containing an automatic combined eight-position relay microprocessor-based pressure regulator with an electric compressor drive, contains the following functional elements (see Fig. 5. Functional diagram of an automatic combined microprocessor-based pressure control system in a pneumatic system of a traction vehicle ): object of pneumatic pressure regulation system OR 28 (pneumatic system of the traction vehicle), the first measuring device (IU1) 1 (pressure sensor p to air in the pneumatic system) with the output signal x d1 , the second measuring device (IU2) 2 (air flow sensor Q 1 from the pneumatic systems) with an output signal x d2 , the third measuring device (IMS) 3 (temperature sensor T a of atmospheric (intake) air) with an output signal x d3 , the fourth measuring device (IU4) 4 (pressure sensor of atmospheric (intake) air a ) with exit signal, x d4 , regulatory body (PO) 5 (compressor K), actuator (MI) 30 with the output signal h them (electric drive of the compressor PC), four driving devices 31, 32, 33 and 34 - (ЗУ1), (GC2), (GC3) and (GC4) with reference signals η 1 , η 2 , η 3 , and with output signals x ss1 , x ss2 and x ss3 , four comparison devices 35, 36, 37 and 38 - (S1) , (СУ2), (СУ3) and (СУ4) with the output signals Δх Sou1 , Δ Дх Su2 , Δх Su3 and Δх Su4 , two correction devices 39 and 40 (УК1) and (УК2) of the static characteristics of measuring devices ИУ2 and ИУ3 with output signals x yk1 and x yk2 , device summation 41 (US) with the output signal x mustache of the output signals of the comparing devices SU1, SU2, SU3 and SU4, the unloading device 29 RUi controlling 42 (SU) with the output signal x yy .
Разгрузочное устройство применено в микропроцессорной автоматической системе регулирования давления с целью уменьшения времени разгона компрессора и токовой нагрузки при пуске электрического привода компрессора. При включении катушечных групп статорной обмотки двигателя на новое (меньшее) число пар полюсов устройство управления включает на несколько (3-5) секунд разгрузочное устройство РУ, которое отключает пневматическую систему от компрессора, а его выход соединяет с атмосферой.The unloading device is used in a microprocessor-based automatic pressure control system to reduce the acceleration time of the compressor and the current load when starting the electric drive of the compressor. When you turn on the coil groups of the stator winding of the motor to a new (smaller) number of pole pairs, the control device turns on the RU unloading device for several (3-5) seconds, which disconnects the pneumatic system from the compressor and connects its output to the atmosphere.
Устройства коррекции УК1 и УК2 статических характеристик измерительных устройств ИУ2 и ИУЗ предназначены для установления степени влияния сигналов возмущающих воздействий λ1 и λ2 на регулирующее воздействие µ. Степени влияния определяются значениями коэффициентов передачи устройств коррекции УК1 и УК2: kук1 и kук2 (статические параметры настройки регулятора). Например, давление воздуха в пневматической системе рк изменяется пропорционально давлению атмосферного (всасываемого) воздуха ра, а коэффициент пропорциональности (коэффициент передачи пневматической системы по давлению атмосферного (всасываемого) воздуха ра) равен единице. Поэтому для уменьшения влияния давления атмосферного (всасываемого) воздуха ра на регулирующее воздействие µ, а значит и на давление воздуха в пневматической системе рк, необходимо делать меньше единицы значение коэффициента передачи устройства коррекции УК2.Correction devices UK1 and UK2 of the static characteristics of measuring devices ИУ2 and ИУЗ are designed to determine the degree of influence of disturbing signals λ 1 and λ 2 on the regulatory action µ. The degree of influence is determined by the values of the transmission coefficients of correction devices UK1 and UK2 : k UK1 and k UK2 (static controller settings). For example, the air pressure in the pneumatic system p k changes in proportion to the pressure of the atmospheric (intake) air p a , and the proportionality coefficient (transmission coefficient of the pneumatic system for the pressure of the atmospheric (intake) air p a ) is equal to one. Therefore, in order to reduce the influence of atmospheric (intake) air pressure p a on the regulating effect µ, and therefore on the air pressure in the pneumatic system p k , it is necessary to make the value of the transmission coefficient of the correction device UK2 less than unity.
Выходной сигнал устройства суммирования УС определяется из выраженияThe output signal of the summing device US is determined from the expression
![]()
![]()
Автоматическая комбинированная микропроцессорная система регулирования давления в пневматической системе тягового транспортного средства содержит четыре регулятора (фиг.5). Регулятор давления рк по отклонению его от заданного значения вместе с объектом регулирования образует замкнутый контур регулирования и содержит функциональные элементы: ИУ1, СУ1, ЗУ1, УС, УУ, ИМ И РО. Регулятор давления рк по расходу воздуха из пневматической системы Q1 вместе с объектом регулирования образует первый разомкнутый контур регулирования и содержит функциональные элементы: ИУ2, УК1, СУ2, ЗУ2, УС, УУ, ИМ И РО. Регулятор давления рк по температуре всасываемого воздуха Та вместе с объектом регулирования образует второй разомкнутый контур регулирования и содержит функциональные элементы: ИУ3, УК2, СУ3, ЗУ3, УС, УУ, ИМ И РО. Регулятор давления рк по давлению всасываемого воздуха ра вместе с объектом регулирования образует третий разомкнутый контур регулирования и содержит функциональные элементы: ИУ4, СУ4, ЗУ4, УС, УУ, ИМ И РО.Automatic combined microprocessor-based pressure control system in the pneumatic system of a traction vehicle contains four regulators (figure 5). The pressure regulator p to its deviation from the set value together with the object of regulation forms a closed control loop and contains functional elements: IU1, SU1, ZU1, US, UU, IM AND RO. The pressure regulator p to the air flow rate from the pneumatic system Q 1 together with the control object forms the first open loop control and contains functional elements: IU2, UK1, SU2, ZU2, US, UU, IM AND RO. The pressure regulator p to the temperature of the intake air T a and together with the control object forms a second open loop control and contains functional elements: IU3, UK2, SU3, ZU3, US, UU, IM AND RO. The pressure regulator p to the pressure of the intake air p a together with the control object forms a third open control loop and contains functional elements: IU4, SU4, ZU4, US, UU, IM AND RO.
Автоматическая комбинированная микропроцессорная система регулирования давления в пневматической системе тягового транспортного средства (см. фиг.6. Блок-схема автоматической комбинированной микропроцессорной системы регулирования давления в пневматической системе тягового транспортного средства) содержит датчик 1 давления рк воздуха в пневматической системе - ДДВ1, датчик 2 расхода воздуха Q1 из пневматической системы - ДРВ, датчик 3 температуры Та всасываемого воздуха - ДТВ, датчик 4 давления ра всасываемого воздуха - ДДВ2, устройства коррекции 39 и 40 - УК1 и УК2, задающие устройства 31, 32, 33 и 34 - ЗУ1, ЗУ2, ЗУ3 и ЗУ4, сравнивающие устройства 35, 36, 37 и 38 - СУ1, СУ2, СУ3 и СУ4, устройства суммирования 41 - УС и управления 42 - УУ, привод компрессора 30 - ПК, компрессор 5 - К и пневматическую систему 28 - ПС. Функции устройств УК1, УК2, ЗУ1, ЗУ2, ЗУ3 и ЗУ4, СУ1, СУ2, СУ3 и СУ4, УС и УУ выполняет микропроцессорный контроллер МПК.The automatic combined microprocessor-based pressure control system in the pneumatic system of the traction vehicle (see Fig. 6. The block diagram of the automatic combined microprocessor-based pressure control system in the pneumatic system of the traction vehicle) contains a pressure sensor p to air in the pneumatic system - DDV1,
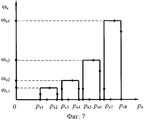
Автоматическая комбинированная микропроцессорная система регулирования давления в пневматической системе тягового транспортного средства работает следующим образом. При отключенных датчиках ДРВ, ДТВ, ДДВ2 и четырехскоростном приводе компрессора микропроцессорный контроллер обеспечивает выключение (при повышении давления рк до значений рк2, рк4, рк6 и рк8) компрессора или включение (при понижении давления рк до значений рк1, рк3, рк5 и Рк7) при соответствующей ступени частоты вращения. В результате автоматический микропроцессорный восьмипозиционный релейный регулятор давления в пневматической системе с электрическим приводом компрессора имеет статические характеристики, представленные на фиг.7 (Фиг.7 Статические характеристики автоматического релейного восьмипозиционного микропроцессорного регулятора давления в пневматической системе). При таком регуляторе давления поле статических характеристик автоматической микропроцессорной системы регулирования давления в пневматической системе с электрическим приводом компрессора будет иметь вид, представленный на фиг.8 (Фиг.8. Поле статических характеристик автоматической комбинированной микропроцессорной системы регулирования давления). На фиг.8 видно, что при уменьшении расхода воздуха из пневматической системы Q1, амплитуда и размах колебаний давления рк увеличиваются. При этом также увеличивается период колебаний давления рк и остаточная неравномерность Δрк. Это обусловлено тем, что при уменьшении расхода воздуха из пневматической системы Q1 и температуры всасываемого воздуха Та увеличиваются постоянная времени и коэффициент передачи пневматической системы как объекта регулирования давления [Попов Е.П. Автоматическое регулирование и управление. - М.: Наука, 1966, стр.309-311. В.С.Прусенко. Пневматические системы автоматического регулирования технологических процессов. - М.: Машиностроение, 1987, стр.164, 165, 180-181]. Уменьшение среднего давления рк при уменьшении расхода воздуха из пневматической системы Q1 приводит к уменьшению точности регулирования давления рк, то есть к снижению качества работы системы регулирования. Увеличение амплитуды и периода колебаний давления рк отрицательно сказывается на технико-экономических показателях компрессора и пневматической системы.Automatic combined microprocessor-based pressure control system in the pneumatic system of a traction vehicle operates as follows. When disconnected sensors DRV, DTV, DDV2 and four-drive compressor microprocessor controller provides off (when the pressure p a to p k2, p k4, p k6 and p k8) of the compressor or the inclusion (by lowering the pressure p k to the values of p k1, p k3 , p k5 and P k7 ) at the corresponding speed stage. As a result, an automatic microprocessor eight-position relay pressure regulator in a pneumatic system with an electric drive of the compressor has the static characteristics shown in Fig.7 (Fig.7 Static characteristics of an automatic eight-position relay microprocessor-based pressure regulator in a pneumatic system). With such a pressure regulator, the field of static characteristics of an automatic microprocessor-based pressure control system in a pneumatic system with an electric drive of the compressor will look like that shown in Fig. 8 (Figure 8. Field of static characteristics of an automatic combined microprocessor-based pressure control system). On Fig shows that with a decrease in air flow from the pneumatic system Q 1, the amplitude and amplitude of the pressure fluctuations p to increase. This also increases the period of pressure fluctuations p k and residual non-uniformity Δ p k . This is due to the fact that with a decrease in the air flow from the pneumatic system Q 1 and the temperature of the intake air T a , the time constant and the transmission coefficient of the pneumatic system as an object of pressure regulation increase [Popov EP Automatic regulation and control. - M .: Nauka, 1966, pp. 309-311. V.S. Prusenko. Pneumatic systems for automatic control of technological processes. - M.: Mechanical Engineering, 1987, p. 164, 165, 180-181]. The decrease in the average pressure p to a decrease in air flow from the pneumatic system Q 1 leads to a decrease in the accuracy of regulation of pressure p to , that is, to reduce the quality of the control system. The increase in the amplitude and period of pressure fluctuations p k negatively affects the technical and economic performance of the compressor and the pneumatic system.
При включенных датчиках ДРВ, ДТВ и ДДВ2 микропроцессорный контроллер в соответствии с программой, заложенной в устройство управления УУ (фиг.5 и 6), обеспечивает включение и выключение соответствующего числа пар полюсов двигателя в зависимости не только от сигнала давления рк, но и от сигналов по расходу воздуха из пневматической системы Q1, температуре всасываемого воздуха Та, давлению ра всасываемого воздуха. При этом автоматический комбинированный релейный восьмипозиционный микропроцессорный регулятор давления имеет статические характеристики (Фиг.9. Статические характеристики автоматического комбинированного микропроцессорного регулятора давления), отличные от характеристик, приведенных на фиг.7. При этом алгоритм (закон) работы устройства управления УУ приводом компрессора ПК имеет вид:When the sensors DRV, DTV and DDV2 are turned on, the microprocessor controller, in accordance with the program embedded in the control unit of the control unit (Figs. 5 and 6), turns on and off the corresponding number of pairs of motor poles, depending not only on the pressure signal p k , but also on signals on the air flow from the pneumatic system Q 1 , the temperature of the intake air T a , the pressure p a of the intake air. Moreover, the automatic combined eight-position relay microprocessor-based pressure regulator has static characteristics (Fig. 9. Static characteristics of the automatic combined microprocessor-based pressure regulator), different from the characteristics shown in Fig.7. At the same time, the algorithm (law) of the operation of the control device of the UE drive of the PC compressor is:
ωв=ωв4 при хуу8<хуу<хуу7 - контактные группы всех переключателей находятся в нижнем положении;ω a = ω c4 uu8 when x <y, x <x uu7 - contact groups all switches are in the down position;
ωв=ωв3 при хуу6<хуу<хуу5 - контактные группы переключателя 3 находятся в верхнем положении, а переключателей 10 и 11, 13-17 - в нижнем положении;ω a = ω e3 uu6 when x <y, x <x uu5 - 3 switch contact groups are in the upper position and the
ωв=ωв2 при хуу4<хуу<хуу3 - контактные группы переключателей 10-13 находятся в верхнем положении, а контактные группы переключателей 14-17 находятся в нижнем положении;ω a = ω e2 uu4 when x <y, x <x uu3 - contact groups switches 10-13 are in the upper position, and the contact group of switches 14-17 are in the lowered position;
ωв=ωв1 при хуу2<хуу<хуу1 - контактные группы всех переключателей находятся в верхнем положении.ω a = ω c1 N2 for x <y, x <x MA1 - contact groups all switches are in the upper position.
Эти переключения катушечных групп статорной обмотки двигателя производятся в соответствии с таблицей 1.These switches of the stator coil groups of the motor are made in accordance with table 1.
В данной таблице обозначено:This table indicates:
В - подвижные контактные группы переключателей расположены вверху;B - movable contact groups of switches located at the top;
Н - подвижные контактные группы переключателей расположены внизу.H - movable contact groups of switches are located below.
Как видно из таблицы 1, для перевода двигателя с первой ступени частоты вращения (р=8) на вторую ступень частоты вращения (р=4) переключаются 14-17 переключатели; для перевода двигателя со второй ступени частоты вращения на третью ступень частоты вращения (р=2) переключаются 10, 11 и 13 переключатели; а для перевода двигателя с третьей ступени частоты вращения на четвертую ступень частоты вращения (р=1) переключается 12 переключатель. При переключении катушечных групп и изменении числа пар полюсов не происходит разрыва потока мощности на привод компрессора [Винокуров В.А., Попов Д.А. Электрические машины железнодорожного транспорта. - М.: Транспорт, 1986, с.369-372].As can be seen from table 1, to transfer the engine from the first stage of the rotational speed (p = 8) to the second stage of the rotational speed (p = 4), 14-17 switches are switched; to transfer the engine from the second stage of the rotational speed to the third stage of the rotational speed (p = 2) 10, 11 and 13 switches are switched; and to transfer the engine from the third stage of the rotational speed to the fourth stage of the rotational speed (p = 1), a 12 switch is switched. When switching coil groups and changing the number of pole pairs, there is no disruption of the power flow to the compressor drive [V. Vinokurov, D. A. Popov Electric railway vehicles. - M .: Transport, 1986, p. 369-372].
Для того чтобы при уменьшении расхода воздуха из пневматической системы Q1 не увеличивалась амплитуда колебаний давления рк, зона нечувствительности устройства управления УУ, а значит и регулятора давления рк, уменьшается при уменьшении частоты вращения ωк вала компрессора. Зона нечувствительности устройства управления УУ: при ωк=ωк1 2ΔZнч1=хуу2-хуу1, при ωк=ωк2 2ΔZнч2=хуу4-хуу3, при ωк=ωк3 2ΔZнч3=хуу6-хуу5 и при ωк=ωк4 2ΔZнч4=хуу8-хуу7. Соотношение зон нечувствительности: ΔZнч1=kz1ΔZнч2, ΔZнч2=kz2ΔZнч3; kz1>kz2>1. Значения зоны нечувствительности ΔZнч1 и коэффициентов kz1 и kz2 являются статическими параметрами настройки регулятора. Интервалы хуу3-хуу2, хуу5-хуу4 и хуу7-хуу6 составляют 0,1-0,2 от зоны нечувствительности.In order that the amplitude of pressure fluctuations p k does not increase with decreasing air flow from the pneumatic system Q 1 , the dead zone of the control device UU, and hence the pressure regulator p k , decreases with decreasing speed ω k of the compressor shaft. Dead zone of the control unit of the control unit: at ω k = ω k1 2ΔZ nch1 = x yy2- x yy1 , at ω k = ω k2 2ΔZ nch2 = x yy4 - yy3 , with ω k = ω k3 2ΔZ nch3 = x yy6 - yy5 and when ω k = ω k4 2ΔZ nch4 = x yy8- x yy7 . The ratio of dead zones: ΔZ LF1 = k z1 ΔZ LF2 , ΔZ LF2 = k z2 ΔZ LF3 ; k z1 > k z2 > 1. The deadband values ΔZ LF1 and the coefficients k z1 and k z2 are the static settings of the controller. The intervals x yy3- x yy2 , x yy5- x yy4 and x yy7- x yy6 are 0.1-0.2 from the dead zone.
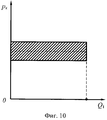
В результате поле характеристик автоматической комбинированной микропроцессорной системы регулирования давления, содержащей автоматический комбинированный релейный восьмипозиционный микропроцессорный регулятор давления с электрическим приводом компрессора, будет иметь вид, представленный на фиг.10 (Фиг.10. Поле характеристик автоматической комбинированной микропроцессорной системы регулирования давления). На фиг.10 видно, что при уменьшении расхода воздуха из пневматической системы Q1, среднее значение давления рк достается постоянным, также постоянной остается амплитуда колебаний давления рк, что свидетельствует о высоком качестве работы автоматической комбинированной микропроцессорной системы регулирования давления в пневматической системе тягового транспортного средства.As a result, the characteristics field of an automatic combined microprocessor-based pressure control system containing an automatic combined eight-position relay microprocessor-based pressure regulator with an electric drive of the compressor will have the form shown in Fig. 10 (Fig. 10. Characteristics field of an automatic combined microprocessor-based pressure control system). Figure 10 shows that with a decrease in air flow from the pneumatic system Q 1 , the average value of pressure p k remains constant, the amplitude of pressure fluctuations p k also remains constant, which indicates the high quality of the automatic combined microprocessor system for controlling the pressure in the pneumatic traction system vehicle.
Технический результат, который может быть получен при осуществлении предлагаемого изобретенияThe technical result that can be obtained by carrying out the invention.
В предлагаемой автоматической комбинированной микропроцессорной системе регулирования давления в пневматической системе тягового транспортного средства с автоматическим микропроцессорным восьмипозиционным регулятором давления применен более простой, более надежный и более дешевый электрический привод вентилятора, чем в регуляторах известных систем. В нем применен асинхронный двигатель с короткозамкнутым ротором и восемь переключателей (вместо двигателей с фазным ротором и постоянного тока и вращающегося выпрямителя). Осуществление предлагаемого изобретения позволит повысить качество регулирования давления, повысить надежность и снизить стоимость электрического привода компрессора, повысить надежность компрессора, уменьшить расход масла компрессором и топлива транспортным средством. Технический результат достигается за счет того, что автоматическая комбинированная микропроцессорная система регулирования давления в пневматической системе тягового транспортного средства содержит компрессор, соединенный с валом теплового двигателя посредством электрического привода переменного тока, состоящего из источника переменного тока и асинхронного двигателя, датчик давления воздуха в пневматической системе. В ней применен асинхронный двигатель полюсопереключаемый четырехскоростной с короткозамкнутым ротором, с полюсопереключаемой статорной обмоткой, содержащей 24 катушечных группы, соединенных с восемью переключателями катушечных групп и переключателем соединения двигателя с источником переменного тока, подвижные контактные группы которых имеют приводы, входящие в состав управляющего устройства. Электрический привод компрессора связан с управляющим устройством. Регулятор дополнительно содержит датчик расхода воздуха из пневматической системы, датчик температуры всасываемого воздуха и датчик давления всасываемого воздуха. Датчик давления воздуха в пневматической системе связан с первым сравнивающим устройством, датчик давления всасываемого воздуха связан с четвертым сравнивающим устройством, датчик расхода воздуха из пневматической системы и датчик температуры всасываемого воздуха связаны со вторым и третьим сравнивающими устройствами посредством первого и второго устройств коррекции статических характеристик этих датчиков. Первое, второе, третье и четвертое сравнивающие устройства связаны соответственно с первым, вторым, третьим и четвертым задающими устройствами и с устройством суммирования, связанным в свою очередь с управляющим устройством электрического привода компрессора, в программу работы которого заложен алгоритм работы комбинированного релейного восьмипозиционного микропроцессорного регулятора давления воздуха.The proposed automatic combined microprocessor-based pressure control system in the pneumatic system of a traction vehicle with an automatic microprocessor eight-position pressure regulator uses a simpler, more reliable and cheaper electric fan drive than in the regulators of known systems. It employs a squirrel-cage induction motor and eight switches (instead of motors with a phase rotor and direct current and a rotating rectifier). The implementation of the present invention will improve the quality of pressure regulation, increase reliability and reduce the cost of the electric drive of the compressor, increase the reliability of the compressor, reduce the consumption of oil by the compressor and fuel by the vehicle. The technical result is achieved due to the fact that the automatic combined microprocessor system for regulating the pressure in the pneumatic system of a traction vehicle contains a compressor connected to the shaft of a heat engine by means of an AC electric drive consisting of an AC source and an induction motor, an air pressure sensor in the pneumatic system. It uses a four-speed pole-switched asynchronous squirrel-cage motor with a squirrel-cage rotor, with a pole-switched stator winding containing 24 coil groups connected to eight coil group switches and a switch for connecting the motor to an alternating current source, the moving contact groups of which have drives that are part of the control device. The electric drive of the compressor is connected to the control device. The controller further comprises an air flow sensor from the pneumatic system, an intake air temperature sensor, and an intake air pressure sensor. The air pressure sensor in the pneumatic system is connected to the first comparison device, the intake air pressure sensor is connected to the fourth comparison device, the air flow sensor from the pneumatic system and the intake air temperature sensor are connected to the second and third comparison devices by means of the first and second static characteristics correction devices of these sensors . The first, second, third, and fourth comparators are connected respectively with the first, second, third, and fourth drivers and with a summing device, which in turn is connected to a compressor electric drive control device, whose operation program contains the operation algorithm of the combined eight-position relay microprocessor-based pressure regulator air.
Фиг.1. Статические характеристики автоматического релейного двухпозиционного регулятора давления.Figure 1. Static characteristics of an automatic on-off pressure regulator.
Фиг.2. Принципиальная схема асинхронного полюсопереключаемого четырехскоростного двигателя с короткозамкнутым ротором с переключателями катушечных групп статорной обмотки.Figure 2. Schematic diagram of an asynchronous pole-switched four-speed squirrel-cage motor with switches of stator coil groups.
Фиг.3. Принципиальная блок-схема автоматического комбинированного микропроцессорного регулятора давления в пневматической системе тягового транспортного средства.Figure 3. Schematic diagram of an automatic combined microprocessor-based pressure regulator in the pneumatic system of a traction vehicle.
Фиг.4. Принципиальная схема автоматической комбинированной микропроцессорной системы регулирования давления в пневматической системе тягового транспортного средства.Figure 4. Schematic diagram of an automatic combined microprocessor-based pressure control system in the pneumatic system of a traction vehicle.
Фиг.5. Функциональная схема автоматической комбинированной микропроцессорной системы регулирования давления в пневматической системе тягового транспортного.Figure 5. Functional diagram of an automatic combined microprocessor-based pressure control system in a pneumatic traction transport system.
Фиг.6. Блок-схема автоматической комбинированной микропроцессорной системы регулирования.6. Block diagram of an automatic combined microprocessor control system.
Фиг.7. Статические характеристики автоматического релейного восьмипозиционного микропроцессорного регулятора давления в пневматической системе.7. Static characteristics of an automatic eight-position relay microprocessor-based pressure regulator in a pneumatic system.
Фиг.8. Поле статических характеристик автоматической комбинированной микропроцессорной системы регулирования давления.Fig. 8. The field of static characteristics of an automatic combined microprocessor-based pressure control system.
Фиг.9. Статические характеристики автоматического комбинированного микропроцессорного регулятора давления.Fig.9. Static characteristics of an automatic combined microprocessor pressure regulator.
Фиг.10. Поле характеристик автоматической комбинированной микропроцессорной системы регулирования давления.Figure 10. Field characteristics of an automatic combined microprocessor-based pressure control system.
Перечень позиций, соответствующих на рисунках основным элементам автоматической комбинированной микропроцессорной системы регулирования давления в пневматической системе тягового транспортного средстваThe list of positions corresponding in the figures to the main elements of an automatic combined microprocessor-based pressure control system in the pneumatic system of a traction vehicle
Фиг.3, 4, 5 и 6:Figures 3, 4, 5 and 6:
1 - датчик давления воздуха в пневматической системе (первое измерительное устройство);1 - air pressure sensor in the pneumatic system (first measuring device);
2 - датчик расхода воздуха из пневматической системы (второе измерительное устройство);2 - air flow sensor from the pneumatic system (second measuring device);
3 - датчик температуры атмосферного (всасываемого) воздуха (третье измерительное устройство);3 - temperature sensor of atmospheric (intake) air (third measuring device);
4 - датчик давления атмосферного (всасываемого) воздуха (четвертое измерительное устройство);4 - pressure sensor of atmospheric (intake) air (fourth measuring device);
5 - компрессор (регулирующий орган);5 - compressor (regulatory body);
6 - тепловой двигатель;6 - heat engine;
7 - синхронный генератор;7 - synchronous generator;
8 - микропроцессорный контроллер;8 - microprocessor controller;
9-16 - переключатели катушечных групп полюсопереключаемой статорной обмотки асинхронного четырехскоростного двигателя;9-16 - switches of the coil groups of the pole switchable stator winding of an asynchronous four-speed motor;
17-24 - приводы подвижных контактных групп переключателей катушечных групп полюсопереключаемой статорной обмотки асинхронного четырехскоростного двигателя;17-24 - actuators of the movable contact groups of the switches of the coil groups of the pole-switchable stator winding of an asynchronous four-speed motor;
25 - переключатель включения асинхронного двигателя;25 - switch to turn on the induction motor;
26 - привод переключателя включения асинхронного двигателя;26 - drive switch on the induction motor;
27 - ротор асинхронного двигателя;27 - rotor of an induction motor;
28 - пневматическая система (объект регулирования температуры);28 - pneumatic system (temperature control object);
29 - разгрузочное устройство компрессора;29 - discharge device of the compressor;
30 - электрический привод компрессора (исполнительный механизм);30 - electric drive of the compressor (actuator);
31-34 - задающие устройства;31-34 - master devices;
35-38 - сравнивающие устройства;35-38 - comparing devices;
39 и 40 - устройства коррекции;39 and 40 are correction devices;
41 - устройство суммирования;41 is a summation device;
42 - устройство управления42 - control device
Перечень условных сокращенийList of Conditional Abbreviations
АСРД - автоматическая система регулирования давленияASRD - automatic pressure control system
ОРД - объект регулирования давленияARD - an object of pressure regulation
АРД - автоматический регулятор давленияARD - automatic pressure regulator
УО - управляющий органUO - governing body
ИРУ - исполнительно-регулирующее устройствоIRA - executive-regulating device
ИУ, ИУ1, ИУ2, ИУ3 и ИУ4 - измерительное устройствоIU, IU1, IU2, IU3 and IU4 - measuring device
ЗУ, ЗУ1, ЗУ2, ЗУ3 и ЗУ4 - задающее устройствоZU, ZU1, ZU2, ZU3 and ZU4 - the master device
УУ - управляющее устройствоUU - control device
УК1 и УК2 - устройства коррекцииUK1 and UK2 - correction devices
СУ, СУ1, СУ2, СУ3 и СУ4 - сравнивающее устройствоSU, SU1, SU2, SU3 and SU4 - a comparing device
ИМ - исполнительный механизмIM - actuator
РО - регулирующий органRO - regulatory authority
ДДВ1 - датчик давления воздуха в пневматической системеDDV1 - air pressure sensor in the pneumatic system
ДРВ - датчик расхода воздуха из пневматической системыDRV - air flow sensor from the pneumatic system
ДТВ - датчик температуры атмосферного (всасываемого) воздухаDTV - temperature sensor of atmospheric (intake) air
ДДВ2 - датчик давления атмосферного (всасываемого) воздухаDDV2 - pressure sensor of atmospheric (intake) air
МПК - микропроцессорный контроллерMPK - microprocessor controller
ПС - пневматическая система тягового транспортного средстваPS - traction vehicle pneumatic system
К - компрессорK - compressor
ПК - привод компрессораPC - compressor drive
Перечень обозначений величинList of designations of quantities
рк - давление воздуха в пневматической системе тягового транспортного средстваp to the air pressure in the pneumatic system of the traction vehicle
Q2 - подача компрессораQ 2 - compressor flow
ωк - частота вращения вала компрессораω to - compressor shaft speed
λ1, λ2 и λ3 - возмущающие воздействияλ 1 , λ 2 and λ 3 - disturbing effects
Q1 - расход воздуха из пневматической системыQ 1 - air flow from the pneumatic system
Та - температура атмосферного (всасываемого) воздухаT a - temperature of the atmospheric (intake) air
ра - давление атмосферного (всасываемого) воздухаp a - pressure of atmospheric (intake) air
φ - сигнал регулируемой величины (давления воздуха в пневматической системе)φ - signal of adjustable size (air pressure in the pneumatic system)
хд1 - выходной сигнал датчика давления воздуха в пневматической системе (первого измерительного устройства)x d1 - output signal of the air pressure sensor in the pneumatic system (first measuring device)
хд2 - выходной сигнал датчика расхода воздуха из пневматической системы (второго измерительного устройства)x d2 - output signal of the air flow sensor from the pneumatic system (second measuring device)
хд3 - выходной сигнал датчика температуры атмосферного (всасываемого) воздуха (третьего измерительного устройства)x d3 - output signal of the temperature sensor of atmospheric (intake) air (third measuring device)
хд4 - выходной сигнал датчика давления атмосферного (всасываемого) воздуха (четвертого измерительного устройства)x d4 - output signal of the pressure sensor of atmospheric (intake) air (fourth measuring device)
hим - выходной сигнал исполнительного механизма (привода компрессора)h them - the output signal of the actuator (compressor drive)
η1, η2, η3 и η4 - сигналы заданияη 1 , η 2 , η 3 and η 4 - reference signals
xзу1, хзу2, хзу3 и хзу4 - выходные сигналы задающих устройствx zu1 , x zu2 , x zu3 and x zu4 - output signals of the master
хук1 и хук2 - выходные сигналы устройств коррекцииx yk1 and x yk2 - output signals of correction devices
Δхсу1, Δхсу2, Δхсу3 и Δхсу4 - выходные сигналы сравнивающих устройствΔx sou1 , Δx su2 , Δx su3 and Δx su4 - output signals of the comparison devices
хус - выходной сигнал устройства суммирования выходных сигналов сравнивающих устройствx us - the output signal of the device for summing the output signals of the comparison devices
хуу - выходной сигнал управляющего устройстваx yy - the output signal of the control device
kук1 и kук2 - коэффициенты передачи устройств коррекцииk UK1 and k UK2 - transmission coefficients of correction devices
kp, kpλ1, kpλ2, и kpλ3 - коэффициенты передачи регулятора по каналам действия регулируемой величины и возмущающих воздействийk p , k pλ1 , k pλ2 , and k pλ3 are the transmission coefficients of the controller through the channels of action of the controlled variable and disturbing influences
kz1 и kz2 - коэффициенты, характеризующие соотношение зон нечувствительности устройства управленияk z1 and k z2 are the coefficients characterizing the ratio of the dead zones of the control device
Δрк - остаточная неравномерностьΔр к - residual unevenness
2ΔZнч1, 2ΔZнч2, 2ΔZнч3 и 2ΔZнч4 - зоны нечувствительности устройства управления.2ΔZ LF1 , 2ΔZ LF2 , 2ΔZ LF3 and 2ΔZ LF4 - dead zones of the control device.
Claims (1)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| RU2011152637/11A RU2503558C2 (en) | 2011-12-23 | 2011-12-23 | Temperature controller of automatic combined microprocessor-based heat machine with blower electric drive |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| RU2011152637/11A RU2503558C2 (en) | 2011-12-23 | 2011-12-23 | Temperature controller of automatic combined microprocessor-based heat machine with blower electric drive |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| RU2011152637A RU2011152637A (en) | 2013-06-27 |
| RU2503558C2 true RU2503558C2 (en) | 2014-01-10 |
Family
ID=48701194
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| RU2011152637/11A RU2503558C2 (en) | 2011-12-23 | 2011-12-23 | Temperature controller of automatic combined microprocessor-based heat machine with blower electric drive |
Country Status (1)
| Country | Link |
|---|---|
| RU (1) | RU2503558C2 (en) |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2014711C1 (en) * | 1990-10-22 | 1994-06-15 | Всесоюзный заочный институт инженеров железнодорожного транспорта | Three-phase winding with pole change-over |
| US6401015B1 (en) * | 1997-10-14 | 2002-06-04 | Scot Stewart | Distributed power and electronic air brake control system for a train and associated methods |
| RU2283252C1 (en) * | 2005-02-17 | 2006-09-10 | Государственное образовательное учреждение высшего профессионального образования "Российский государственный открытый технический университет путей сообщения Министерства путей сообщения Российской Федерации" (РГОТУПС) | System to control pressure in pneumatic system of traction vehicle |
-
2011
- 2011-12-23 RU RU2011152637/11A patent/RU2503558C2/en not_active IP Right Cessation
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2014711C1 (en) * | 1990-10-22 | 1994-06-15 | Всесоюзный заочный институт инженеров железнодорожного транспорта | Three-phase winding with pole change-over |
| US6401015B1 (en) * | 1997-10-14 | 2002-06-04 | Scot Stewart | Distributed power and electronic air brake control system for a train and associated methods |
| RU2283252C1 (en) * | 2005-02-17 | 2006-09-10 | Государственное образовательное учреждение высшего профессионального образования "Российский государственный открытый технический университет путей сообщения Министерства путей сообщения Российской Федерации" (РГОТУПС) | System to control pressure in pneumatic system of traction vehicle |
Also Published As
| Publication number | Publication date |
|---|---|
| RU2011152637A (en) | 2013-06-27 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US7095952B2 (en) | Method for optimizing the efficiency of a motor operated under a load | |
| CN86105608A (en) | Loss of electrical feedback detector | |
| FI73932C (en) | Control system for a diesel electric locomotive | |
| EP3513491B1 (en) | Method for starting up a permanent-magnet synchronous machine, and permanent-magnet synchronous machine | |
| WO2003038988A1 (en) | Speed and direction control for capacitor motors | |
| WO2017174957A2 (en) | Method and apparatus for controlling three-phase electric motor | |
| RU2503558C2 (en) | Temperature controller of automatic combined microprocessor-based heat machine with blower electric drive | |
| US20150311843A1 (en) | Method of loadshedding for a variable speed, constant frequency generator | |
| CN108667375B (en) | Motor zero automatic correction control method | |
| US4538097A (en) | Process and apparatus for recovering energy, in the form of electric energy, from a motor test bench | |
| EP4078800A1 (en) | Electric machine | |
| RU2254249C2 (en) | System to control pressure in pneumatic system of traction vehicle | |
| RU2283252C1 (en) | System to control pressure in pneumatic system of traction vehicle | |
| US11637514B2 (en) | Method for controlling the speed of a three-phase permanent magnet machine having a soft starter by means of a controller cascade, and three-phase machine | |
| RU2501961C2 (en) | Automatic combined microprocessor controller of thermal machine temperature with electric drive of fan | |
| RU2448357C1 (en) | Method to increase power ratio of asynchronous generator with short-circuited rotor during operation in parallel with grid | |
| Garud et al. | A study on variable frequency drive and it’s applications | |
| Kopanev et al. | Modeling of asynchronous traction motor operation modes while turning locomotive wheelsets bandages | |
| RU2251788C1 (en) | Inductor motor control process | |
| RU2729767C1 (en) | Traction vehicle alternating current electric transmission with microprocessor control system | |
| EP4503426A1 (en) | Electrical machine and method of operating electrical machine | |
| Moos et al. | Optimization of the current operating state of induction machines based on electrical quantities | |
| RU2073255C1 (en) | Driveless method of synchronous generator group testing | |
| Volkov | Minimization of electric consumption by a frequency-regulated induction motor in start-braking regimes | |
| RU2417916C1 (en) | Method of diagnosing ship diesel-generator sets |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| MM4A | The patent is invalid due to non-payment of fees |
Effective date: 20140121 |