RU2455044C2 - Combined grip for fitness machine - Google Patents
Combined grip for fitness machine Download PDFInfo
- Publication number
- RU2455044C2 RU2455044C2 RU2010112481/12A RU2010112481A RU2455044C2 RU 2455044 C2 RU2455044 C2 RU 2455044C2 RU 2010112481/12 A RU2010112481/12 A RU 2010112481/12A RU 2010112481 A RU2010112481 A RU 2010112481A RU 2455044 C2 RU2455044 C2 RU 2455044C2
- Authority
- RU
- Russia
- Prior art keywords
- grip
- specified
- loop
- simulator
- elongated element
- Prior art date
Links
Images



























Classifications
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B21/00—Exercising apparatus for developing or strengthening the muscles or joints of the body by working against a counterforce, with or without measuring devices
- A63B21/002—Exercising apparatus for developing or strengthening the muscles or joints of the body by working against a counterforce, with or without measuring devices isometric or isokinetic, i.e. substantial force variation without substantial muscle motion or wherein the speed of the motion is independent of the force applied by the user
- A63B21/0023—Exercising apparatus for developing or strengthening the muscles or joints of the body by working against a counterforce, with or without measuring devices isometric or isokinetic, i.e. substantial force variation without substantial muscle motion or wherein the speed of the motion is independent of the force applied by the user for isometric exercising, i.e. substantial force variation without substantial muscle motion
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B21/00—Exercising apparatus for developing or strengthening the muscles or joints of the body by working against a counterforce, with or without measuring devices
- A63B21/16—Supports for anchoring force-resisters
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B21/00—Exercising apparatus for developing or strengthening the muscles or joints of the body by working against a counterforce, with or without measuring devices
- A63B21/16—Supports for anchoring force-resisters
- A63B21/1618—Supports for anchoring force-resisters on a door or a door frame
- A63B21/1663—Supports for anchoring force-resisters on a door or a door frame for anchoring between a door and the door frame
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B21/00—Exercising apparatus for developing or strengthening the muscles or joints of the body by working against a counterforce, with or without measuring devices
- A63B21/40—Interfaces with the user related to strength training; Details thereof
- A63B21/4001—Arrangements for attaching the exercising apparatus to the user's body, e.g. belts, shoes or gloves specially adapted therefor
- A63B21/4017—Arrangements for attaching the exercising apparatus to the user's body, e.g. belts, shoes or gloves specially adapted therefor to the upper limbs
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B21/00—Exercising apparatus for developing or strengthening the muscles or joints of the body by working against a counterforce, with or without measuring devices
- A63B21/40—Interfaces with the user related to strength training; Details thereof
- A63B21/4027—Specific exercise interfaces
- A63B21/4033—Handles, pedals, bars or platforms
- A63B21/4035—Handles, pedals, bars or platforms for operation by hand
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B23/00—Exercising apparatus specially adapted for particular parts of the body
- A63B23/035—Exercising apparatus specially adapted for particular parts of the body for limbs, i.e. upper or lower limbs, e.g. simultaneously
- A63B23/0355—A single apparatus used for either upper or lower limbs, i.e. with a set of support elements driven either by the upper or the lower limb or limbs
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B23/00—Exercising apparatus specially adapted for particular parts of the body
- A63B2023/006—Exercising apparatus specially adapted for particular parts of the body for stretching exercises
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B21/00—Exercising apparatus for developing or strengthening the muscles or joints of the body by working against a counterforce, with or without measuring devices
- A63B21/02—Exercising apparatus for developing or strengthening the muscles or joints of the body by working against a counterforce, with or without measuring devices using resilient force-resisters
- A63B21/04—Exercising apparatus for developing or strengthening the muscles or joints of the body by working against a counterforce, with or without measuring devices using resilient force-resisters attached to static foundation, e.g. a user
- A63B21/0442—Anchored at one end only, the other end being manipulated by the user
-
- A—HUMAN NECESSITIES
- A63—SPORTS; GAMES; AMUSEMENTS
- A63B—APPARATUS FOR PHYSICAL TRAINING, GYMNASTICS, SWIMMING, CLIMBING, OR FENCING; BALL GAMES; TRAINING EQUIPMENT
- A63B2225/00—Miscellaneous features of sport apparatus, devices or equipment
- A63B2225/09—Adjustable dimensions
Abstract
Description
ОБЛАСТЬ ИЗОБРЕТЕНИЯFIELD OF THE INVENTION
Конкретные варианты выполнения, описанные здесь, относятся к тренажерам, в частности к захватам для тренажера, имеющего неупругую ленту, которую можно легко приспособить для выполнения большого количества разнообразных упражнений.The specific embodiments described herein relate to simulators, in particular grippers for a simulator having an inelastic tape that can be easily adapted to perform a wide variety of exercises.
ПРЕДПОСЫЛКИ ИЗОБРЕТЕНИЯBACKGROUND OF THE INVENTION
Как пример тренажера, тренажеры с сопротивлением позволяют пользователю выполнять упражнения, создавая сопротивление движению его рук, ног или туловища. Таким образом, например, такие устройства позволяют пользователю выполнять упражнения путем работы одной мышцы против другой или работы против веса пользователя, обеспечивая сопротивление движению его рук, ног или туловища. Некоторые тренажеры с сопротивлением прикреплены к конструкции. Другие устройства прикреплены с возможностью снятия к конкретному типу конструкции, как, например, между дверью и дверным косяком.As an example of a simulator, resistance training simulators allow the user to perform exercises, creating resistance to the movement of his arms, legs or torso. Thus, for example, such devices allow the user to perform exercises by working one muscle against another or working against the weight of the user, providing resistance to movement of his arms, legs or torso. Some resistance training equipment is attached to the structure. Other devices are removably attached to a particular type of structure, such as, for example, between a door and a door jamb.
Имеется потребность в тренажере с сопротивлением, который легко регулируется, так что может обеспечить полную тренировку для любого пользователя, содержит регулировки, которые обеспечивают возможность получения большого разнообразия позиций и упражнений, и который обеспечивает сопротивление движению пользователя в форме, которая полезна для тренировки.There is a need for a resistance training simulator that is easily adjustable so that it can provide a complete workout for any user, contains adjustments that provide a wide variety of positions and exercises, and which provides resistance to the user's movement in a form that is useful for training.
СУЩНОСТЬ ИЗОБРЕТЕНИЯSUMMARY OF THE INVENTION
Настоящее изобретение преодолевает недостатки предшествующего уровня техники, обеспечивая комбинированный захват для тренажера, который легко видоизменяем для обеспечения возможности выполнения большого разнообразия упражнений. Например, конкретные описанные здесь варианты выполнения тренажера содержат регулируемый захват для ступни.The present invention overcomes the disadvantages of the prior art by providing a combined grip for a simulator that is easily modifiable to enable a wide variety of exercises to be performed. For example, the specific simulator embodiments described herein comprise an adjustable foot grip.
Некоторые варианты выполнения обеспечивают захват для использования пользователем тренажера. Захват содержит удлиненный элемент. Удлиненный элемент выполнен в форме цифры 8, которая ограничивает перекрестную часть, первую петлю, которая прикреплена к тренажеру и проходит до перекрестной части, и вторую петлю, проходящую от перекрестной части. Захват дополнительно содержит захват для кисти руки, прикрепленный с возможностью скольжения к удлиненному элементу около перекрестной части. Вторая петля выполнена с возможностью регулирования ее длины в соответствии с положением захвата для кисти руки на удлиненном элементе.Some embodiments provide a grip for use by the simulator user. The gripper contains an elongated element. The elongated element is made in the form of a figure 8, which delimits the cross section, the first loop, which is attached to the simulator and runs to the cross section, and the second loop, passing from the cross section. The grip further comprises a grip for the wrist, slidably attached to the elongated element near the cross part. The second loop is made with the possibility of adjusting its length in accordance with the position of the grip for the hand on an elongated element.
Некоторые другие варианты выполнения обеспечивают захват для использования пользователем тренажера. Захват содержит удлиненный элемент, прикрепленный к тренажеру, и захват для кисти руки, прикрепленный с возможностью скольжения к удлиненному элементу. Удлиненный элемент образует петлю, проходящую от захвата для кисти руки. Петля выполнена с возможностью регулирования ее длины в соответствии с положением захвата для кисти руки вдоль удлиненного элемента.Some other embodiments provide a grip for use by the simulator user. The grip comprises an elongated element attached to the simulator, and a hand grip that is slidably attached to the elongated element. The elongated element forms a loop extending from the grip for the wrist. The loop is made with the possibility of adjusting its length in accordance with the position of the capture for the hand along the elongated element.
Некоторые варианты выполнения обеспечивают захват для использования пользователем тренажера. Захват содержит удлиненный элемент, прикрепленный к тренажеру, причем удлиненный элемент содержит гибкий материал. Захват также содержит захват для кисти руки, прикрепленный с возможностью скольжения к удлиненному элементу. Часть удлиненного элемента представляет собой петлю, имеющую концы, каждый из которых находится в контакте с захватом для кисти руки. Длина петли между концами петли может регулироваться в соответствии с положением захвата для кисти руки на удлиненном элементе.Some embodiments provide a grip for use by the simulator user. The grip comprises an elongated element attached to the simulator, the elongated element containing a flexible material. The grip also includes a grip for the wrist, slidably attached to the elongated element. Part of the elongated element is a loop having ends, each of which is in contact with a grip for the wrist. The length of the loop between the ends of the loop can be adjusted in accordance with the position of the grip for the hand on the elongated element.
Эти признаки вместе с различными вспомогательными условиями и признаками, которые должны быть очевидны специалистам в этом уровне техники из следующего детального описания, достигаются посредством захвата тренажера, выполненного в соответствии с настоящим изобретением, варианты выполнения которого показаны исключительно посредством примера со ссылкой на сопровождающие чертежи.These features, together with various auxiliary conditions and features that should be apparent to those skilled in the art from the following detailed description, are achieved by gripping a simulator made in accordance with the present invention, embodiments of which are shown by way of example only with reference to the accompanying drawings.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙBRIEF DESCRIPTION OF THE DRAWINGS
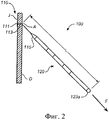
Фиг.1 является схематическим видом спереди одного варианта выполнения тренажера, закрепленного между дверью и дверным косяком;Figure 1 is a schematic front view of one embodiment of a simulator mounted between a door and a door jamb;
Фиг.2 является схематическим частичным разрезом по линии 2-2, изображенной на Фиг.1, показывающим тренажер, закрепленный между дверью и дверным косяком;FIG. 2 is a schematic partial sectional view taken along line 2-2 of FIG. 1, showing a simulator mounted between a door and a door jamb;
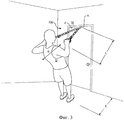
Фиг.3 представляет собой иллюстрацию пользователя, выполняющего упражнение тяги в стойке верхнего ряда с вариантом выполнения тренажера, показанным на Фиг.1;FIG. 3 is an illustration of a user performing a traction exercise in a rack of the upper row with an embodiment of the simulator shown in FIG. 1;
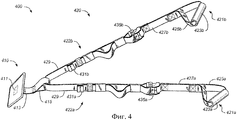
Фиг.4 представляет собой вид в аксонометрии второго варианта выполнения тренажера;Figure 4 is a perspective view of a second embodiment of a simulator;
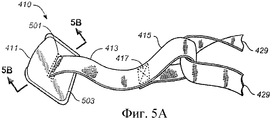
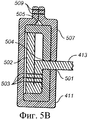
Фиг.5А и 5В представляют собой вид первого варианта выполнения анкера тренажера, изображенного на Фиг.4, причем Фиг.5А является видом в аксонометрии, а Фиг.5В является видом в разрезе, взятом по линии 5В-5В;FIGS. 5A and 5B are views of a first embodiment of the simulator anchor shown in FIG. 4, FIG. 5A is a perspective view and FIG. 5B is a sectional view taken along
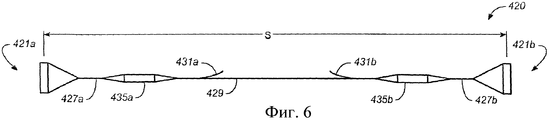
Фиг.6 представляет собой схематический вид сверху удлиненного элемента варианта выполнения, показанного на Фиг.4, имеющего два удлиняющих механизма и два захвата для кисти руки;FIG. 6 is a schematic top view of an elongated element of the embodiment shown in FIG. 4 having two extension mechanisms and two hand grips;
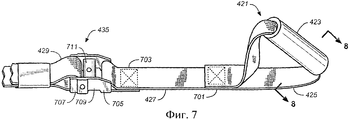
Фиг.7 представляет собой вид в аксонометрии, изображающий детали захвата и удлиняющего механизма варианта выполнения, изображенного на Фиг.4;Fig. 7 is a perspective view showing details of the gripper and extension mechanism of the embodiment depicted in Fig. 4;
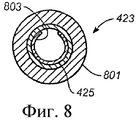
Фиг.8 представляет собой вид в разрезе, взятом по линии 8-8, изображенной на Фиг.7, показывающий захват для кисти руки;Fig. 8 is a sectional view taken along line 8-8 of Fig. 7, showing a grip for a hand;
Фиг.9А представляет собой вид в аксонометрии, изображающий детали ненатянутых рукавов варианта выполнения, изображенного на Фиг.4;Fig. 9A is a perspective view showing parts of the loose sleeves of the embodiment of Fig. 4;
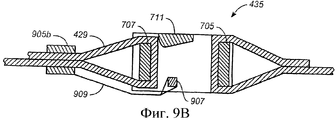
Фиг.9В представляет собой вид в разрезе, взятом по линии 9В-9В, изображенной на Фиг.9А, показывающий детали пряжки и прикрепление к ней ненатянутых рукавов;Fig. 9B is a sectional view taken along
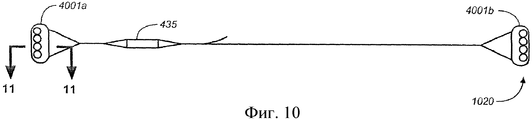
Фиг.10 представляет собой схематический вид сверху альтернативного варианта выполнения удлиненного элемента, имеющего один удлиняющий механизм и два захвата для пальцев;Figure 10 is a schematic top view of an alternative embodiment of an elongated member having one extension mechanism and two finger grips;
Фиг.11 представляет собой схематический вид в разрезе, взятом по линии 11-11, варианта выполнения захвата для пальцев, изображенного на Фиг.10;11 is a schematic sectional view taken along line 11-11 of an embodiment of a finger grip shown in FIG. 10;
Фиг.12А-12D представляют собой схематические чертежи, иллюстрирующие использование тренажера, причем Фиг.12А представляет собой начальную конфигурацию, Фиг.12В иллюстрирует удлинение удлиненного элемента, которое далее проиллюстрировано на Фиг.12В′ и 12В′′, Фиг.12С показывает приложение силы к более короткому плечу удлиненного элемента, и Фиг.12D показывает приложение силы к захватам во время упражнения;12A-12D are schematic drawings illustrating the use of the simulator, FIG. 12A is an initial configuration, FIG. 12B illustrates an extension of an elongated member, which is further illustrated in FIGS. 12B ′ and 12B ″, FIG. 12C shows a force application to the shorter shoulder of the elongated element, and Fig. 12D shows the application of force to the grips during exercise;
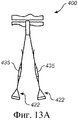
Фиг.13А-13С представляют собой схематические чертежи, иллюстрирующие использование тренажера, имеющего различные длины плеч, причем Фиг.13А представляет собой начальную конфигурацию, Фиг.13В показывает приложение силы к одной из пары плеч, а Фиг.13С показывает приложение силы к захватам во время упражнения;13A-13C are schematic drawings illustrating the use of a simulator having different shoulder lengths, FIG. 13A is an initial configuration, FIG. 13B shows the application of force to one of a pair of shoulders, and FIG. 13C shows the application of force to the grips in exercise time;
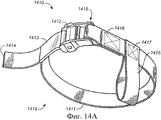
Фиг.14А представляет собой второй вариант выполнения анкера, который может использоваться для прикрепления тренажера к рейке или поручню, а Фиг.14В представляет собой тренажер, прикрепленный к рейке, с использованием варианта выполнения анкера, альтернативного показаному на Фиг.14А;Fig. 14A is a second embodiment of an anchor that can be used to attach the simulator to a rail or handrail, and Fig. 14B is a simulator attached to a rail using an alternative embodiment of the anchor shown in Fig. 14A;
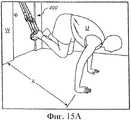
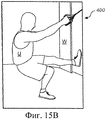
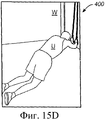
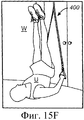
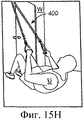
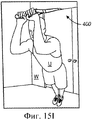
Фиг.15А-15I иллюстрируют позы пользователя, использующего вариант выполнения тренажера, чтобы выполнять упражнения, причем Фиг.15А показывает упражнение: из упора на руках лицом вниз подтягиваются ноги, закрепленные сзади стопами в захватах тренажера; Фиг.15В показывает упражнение: приседание на одной ноге с упором другой ноги в стену и подтягивании на руках, кисти которых закреплены в захватах тренажера; на Фиг.15С гимнаст, находясь спиной к стене, имитирует погружение в воду в группировке; на Фиг.15D в положении стоя на коленях лицом к стене гимнаст тянет руками захваты тренажера вниз; на Фиг.15Е в положении лежа на спине и с упором на руки гимнаст подтягивает ноги, стопы которых закреплены в захватах тренажера; на Фиг.15F в положении лежа на спине гимнаст осуществляет подъем бедер, когда его руки тянут вниз захваты тренажера; на Фиг.15G, стоя лицом к стене, гимнаст пытается поднимать вверх руки, держась за захваты тренажера; на Фиг.15Н в положении лежа на спине и с упором ногами в стену гимнаст, держась руками за захваты тренажера, пытается подтянуться и сгруппироваться; на Фиг.151 показано упражнение на растяжение трицепса;FIGS. 15A-15I illustrate the postures of a user using an embodiment of the simulator to perform exercises, FIG. 15A shows an exercise: legs supported from the rear by feet in the arms of the simulator are pulled face down from the support on the arms; Figv shows an exercise: squat on one leg with the emphasis of the other leg against the wall and pulling up on the hands, the hands of which are fixed in the grips of the simulator; on Figs gymnast, while his back to the wall, simulates immersion in water in a group; on Fig.15D in a kneeling position facing the wall, the gymnast pulls the arms of the simulator down; on FigE in the supine position and with emphasis on the hands, the gymnast lifts the legs, whose feet are fixed in the grips of the simulator; on Fig. 15F in the supine position, the gymnast lifts the hips when his hands pull down the grips of the simulator; on Fig.15G, facing the wall, the gymnast is trying to raise his hands, holding on to the grips of the simulator; on Fig.15H in a supine position and with his feet resting on the wall, the gymnast, holding his hands on the grips of the simulator, tries to pull himself up and group; on Fig shows an exercise in stretching triceps;
Фиг.16А и 16В представляют собой вариант выполнения тренажера для выполнения упражнений одной рукой, причем Фиг.16А показывает сцепление между собой ручек захватов для выполнения упражнений одной рукой, а Фиг.16В иллюстрирует использование тренажера при выполнении упражнения тяги в стойке верхнего ряда одной рукой;Figa and 16B are an embodiment of a simulator for performing exercises with one hand, and Fig.16A shows the grip between the grips of the grips to perform exercises with one hand, and Fig.16B illustrates the use of the simulator when performing traction exercises in the rack of the upper row with one hand;
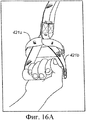
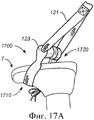
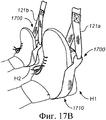
Фиг.17А и 17В представляют собой вариант выполнения приспособления для захвата ступней, которое прикреплено к захвату тренажера, причем Фиг.17А иллюстрирует приспособление для захвата ступней, захваченное пальцами ноги пользователя, а Фиг.17В иллюстрирует пару приспособлений для захвата ступней с одним приспособлением на каждой паре захвата тренажера, удерживаемое одной из пяток пользователя;FIGS. 17A and 17B are an embodiment of a foot grip device that is attached to a grip of the simulator, FIG. 17A illustrates a foot grip device gripped by a user's toes, and FIG. 17B illustrates a pair of foot grip devices with one device on each simulator grip pair held by one of the user's heels;
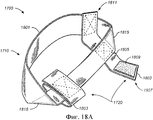
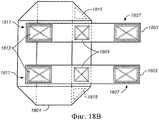
Фиг.18А, 18В, 18С и 18D представляют собой первый вариант выполнения приспособления для захвата ступней, изображенного на Фиг.17А-В, причем Фиг.18А представляет собой вид в аксонометрии приспособления для захвата ступней, Фиг.18В представляет собой вид снизу приспособления для захвата ступней, Фиг.18С представляет собой вид сбоку части одной из частей крепления захвата, и Фиг.18D представляет собой вид сверху части одной из частей крепления приспособления для захвата;FIGS. 18A, 18B, 18C, and 18D are a first embodiment of the foot gripper shown in FIGS. 17A-B, FIG. 18A is a perspective view of the foot gripper, FIG. 18B is a bottom view of the foot gripper foot grip, FIG. 18C is a side view of a portion of one of the gripping attachment portions, and FIG. 18D is a top view of a portion of one of the attachment portions of the gripping attachment;
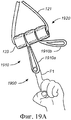
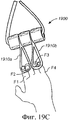
Фиг.19А, 19В и 19С представляют собой вариант выполнения приспособления для захвата пальцами, прикрепленного к захвату тренажера, причем Фиг.19А иллюстрирует один палец, продетый через одну из петель, Фиг.19В иллюстрирует один палец, продетый через каждую из этих двух петель, и Фиг.19С показывает два пальца, продетые через каждую из этих двух петель;FIGS. 19A, 19B and 19C are an embodiment of a finger grip attachment attached to the grip of the simulator, FIG. 19A illustrating one finger threaded through one of the loops, FIG. 19B illustrates one finger threaded through each of these two loops, and FIG. 19C shows two fingers threaded through each of these two loops;
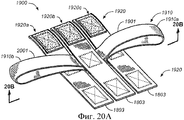
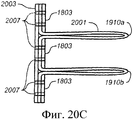
Фиг.20А, 20В и 20С представляют собой один вариант выполнения приспособления для захвата пальцами, изображенного на Фиг.19А-С, причем Фиг.20А представляет собой вид в аксонометрии приспособления для захвата пальцами, Фиг.20В представляет собой вид сверху по линии 20В-20В приспособления для захвата пальцами, и Фиг.20С представляет собой вид сбоку в разрезе по линии 20С-20С приспособления для захвата пальцами;FIGS. 20A, 20B, and 20C are one embodiment of the finger grip device shown in FIGS. 19A-C, wherein FIG. 20A is a perspective view of a finger grip device; FIG. 20B is a plan view along
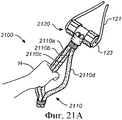
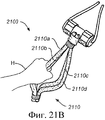
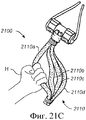
Фиг.21А, 21В и 21С представляют собой вариант выполнения приспособления для захвата, прикрепленного к захвату тренажера, причем Фиг.21А показывает кисть руки, захватывающую три шнура, Фиг.21В показывает кисть руки, захватывающую два шнура, и Фиг.21С показывает кисть руки, захватывающую один шнур;21A, 21B and 21C are an embodiment of a grip attachment attached to the grip of the simulator, FIG. 21A shows a hand gripping three cords, FIG. 21B shows a hand gripping two cords, and FIG. 21C shows a hand exciting one cord;
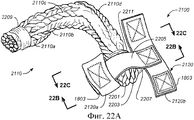
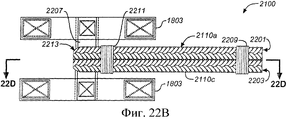
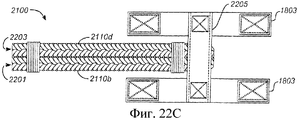
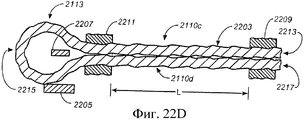
Фиг.22А, 22В, 22С и 22D представляют собой один вариант выполнения приспособления для захвата, изображенного на Фиг.21А-С, причем Фиг.22А представляет собой вид в аксонометрии приспособления для захвата, Фиг.22В представляет собой вид сверху приспособления для захвата, Фиг.22С представляет собой вид снизу приспособления для захвата, и Фиг.22D представляет собой вид сбоку в разрезе по линии 22D-22D, изображенной на Фиг.22С;FIGS. 22A, 22B, 22C, and 22D are one embodiment of the gripper shown in FIGS. 21A-C, FIG. 22A is a perspective view of a gripper, FIG. 22B is a plan view of a gripper, FIG. 22C is a bottom view of the gripper, and FIG. 22D is a sectional side view along
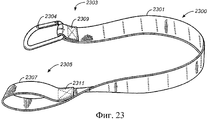
Фиг.23 представляет собой третий вариант выполнения анкера;23 is a third embodiment of an anchor;
Фиг.24 иллюстрирует использование анкера, изображенного на Фиг.23 для крепления тренажера на дереве;Fig.24 illustrates the use of the anchor depicted in Fig.23 for mounting the simulator on a tree;
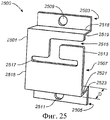
Фиг.25 и 26 представляют собой вариант выполнения скобы для крепления тренажера при помощи увеличенного первого конца анкера, причем Фиг.25 представляет собой вид в аксонометрии передней части скобы для установки тренажера, а Фиг.26 иллюстрирует использование скобы для крепления тренажера;FIGS. 25 and 26 are an embodiment of a bracket for securing the simulator with an enlarged first end of the anchor, FIG. 25 is a perspective view of the front of the bracket for installing the simulator, and FIG. 26 illustrates the use of the bracket for securing the simulator;
Фиг.27 представляет собой вид в аксонометрии первого варианта выполнения комбинированного захвата;Fig is a perspective view of a first embodiment of a combined capture;
Фиг.28 представляет собой вид в аксонометрии второго варианта выполнения комбинированного захвата;FIG. 28 is a perspective view of a second embodiment of a combined gripper; FIG.
Фиг.29 представляет собой вид в аксонометрии третьего варианта выполнения комбинированного захвата; иFig. 29 is a perspective view of a third embodiment of a combined gripper; and
Фиг.30А и 30В представляют собой вид в аксонометрии комбинированного захвата, изображенного на Фиг.29, с захватом для кисти руки, расположенным, соответственно, в верхнем и нижнем положениях.Figa and 30B are a perspective view of the combined grip depicted in Fig.29, with a grip for the hand, located, respectively, in the upper and lower positions.
Номера позиций используются на чертежах для указания конкретных изображенных на них элементов, аспектов или признаков, причем одинаковые номера позиций на более чем одном чертеже указывают схожие изображенные на них элементы, аспекты или признаки.Key numbers are used in the drawings to indicate the particular elements, aspects or features depicted on them, with the same key numbers in more than one drawing indicating similar elements, aspects or features depicted on them.
ОПИСАНИЕ ВАРИАНТОВ ВЫПОЛНЕНИЯ ИЗОБРЕТЕНИЯDESCRIPTION OF EMBODIMENTS OF THE INVENTION
В целях противопоставления различных вариантов прежним конструкциям, где это необходимо описаны некоторые аспекты и преимущества этих вариантов. Конечно, следует понимать, что не обязательно все такие аспекты или преимущества могут быть достигнуты в соответствии с любым конкретным вариантом. Специалистами могут быть осуществлены модификации и изменения, не отходя от сущности и объема изобретения, включая, но не ограничиваясь, использование неупругих элементов, которые описаны здесь как ленты, имеющие круглую или какую-либо другую форму поперечного сечения, и/или которые образованы из двух или большего количества элементов, соединенных вместе при помощи сшивания или склеивания, или использование различных механизмов для регулировки длины неупругого элемента, которые известны в данной области, включая, но не ограничиваясь, пряжки, крючки или наматывание неупругого элемента на жесткий элемент. Кроме того, любой по меньшей мере один признак любого варианта выполнения изобретения может сочетаться по меньшей мере с одним другим признаком любого другого варианта изобретения, не выходя за рамки объема изобретения.In order to contrast the various options with previous designs, where necessary, some aspects and advantages of these options are described. Of course, it should be understood that not all of these aspects or advantages can be achieved in accordance with any particular option. Specialists can make modifications and changes without departing from the essence and scope of the invention, including, but not limited to, the use of inelastic elements, which are described here as tapes having a round or some other cross-sectional shape, and / or which are formed of two or more elements joined together by stitching or gluing, or using various mechanisms to adjust the length of the inelastic element that are known in the art, including, but not limited to, yazhki, hooks or winding the inelastic element on the rigid element. In addition, any at least one feature of any embodiment of the invention may be combined with at least one other feature of any other embodiment of the invention without departing from the scope of the invention.
Здесь описывается неупругий тренажер, который поддерживается опорной конструкцией или может быть легко к ней прикреплен и который позволяет пользователю выполнять большое число упражнений, легко регулируя длину устройства и уравновешивая затем устройство, когда пользователь передает ему свой вес. Некоторые признаки будут проиллюстрированы ниже со ссылкой на Фиг.1-3, которые показывают устройство и применение варианта выполнения тренажера и которые не означают ограничения объема настоящего изобретения. Фиг.1 является схематическим видом спереди одного варианта тренажера 100, который закреплен в точке А между дверью D и дверным косяком J. Фиг.2 является частичным разрезом по линии 2-2, показанной на Фиг.1, проходящим через дверь D и показывающим тренажер 100 сбоку, а Фиг.3 показывает пользователя U, упражняющегося на тренажере, представленном на Фиг.1.An inelastic simulator is described here, which is supported by the support structure or can be easily attached to it and which allows the user to perform a large number of exercises, easily adjusting the length of the device and then balancing the device when the user transfers his weight to him. Some features will be illustrated below with reference to FIGS. 1-3, which show the apparatus and application of an embodiment of the simulator and which do not mean limiting the scope of the present invention. Figure 1 is a schematic front view of one embodiment of the
Тренажер 100 содержит анкер 110 и удлиненный элемент 120, имеющий пару плеч 122, обозначенных как первое плечо 122а и второе плечо 122b, с обеих сторон анкера, как схематически показано на Фиг.1 и 2. Имеется пара захватов 123, расположенных по одному на каждом конце 121 каждого плеча 122, а именно, первое плечо 122а имеет первый захват 123а, а второе плечо 122b имеет второй захват 123b. Удлиненный элемент 120 является по существу неупругим и гибким, имеет длину S между парой захватов 123 и содержит ленту или шнур или другой неупругий гибкий элемент и механизм 135 удлинения, который обеспечивает увеличение или уменьшение длины S, как показано двойными стрелками ΔS.The
Используемое здесь существительное "захват" включает любое устройство, которое может сцепляться с частью тела человека, т.е. может быть присоединено таким образом, что пользователь может передавать силу, предпочтительно равную части или всему его весу, захвату, а используемый здесь глагол "захватывать" относится к действию по сцеплению устройства и части тела человека. При использовании в тренажере захват прикрепляется к другим элементам, которые позволяют передавать силу другому объекту, включая, но не ограничиваясь, неподвижную опору, устройство, которое может запасать или высвобождать энергию, такое как эластичный шнур или пружина, или другой части тела. Захваты включают устройства, которые могут быть окружены частью тела, например гибкую петлю или крюк, или которые может окружать часть тела, например удлиненный элемент, который может подходить для захвата рукой. В данном контексте элемент, который может быть захвачен, - это элемент, который может окружать часть тела или быть окружен частью тела и имеет размер и конфигурацию, которые позволяют передавать силы от пользователя к захвату. "Захват для кисти руки" представляет собой захват, имеющий размеры, подходящие для захвата кистью руки, "захват для ступни" является захватом, который имеет такой размер, чтобы его можно было захватить ступней ноги, а "захват для пальцев" является захватом, который имеет такой размер, чтобы его можно было захватить одним или большим количеством пальцев.As used herein, the noun “capture” includes any device that can engage with a part of the human body, i.e. can be attached in such a way that the user can transmit a force, preferably equal to part or all of its weight, to the grip, and the verb "grab" used here refers to the action of coupling the device and part of the human body. When used in a simulator, the grip attaches to other elements that allow power to be transmitted to another object, including, but not limited to, a fixed support, a device that can store or release energy, such as an elastic cord or spring, or another part of the body. Grips include devices that may be surrounded by a part of the body, such as a flexible loop or hook, or which may surround a part of the body, such as an elongated element, which may be suitable for hand grip. In this context, an element that can be captured is an element that can surround a part of the body or be surrounded by a part of the body and has a size and configuration that allows the transfer of forces from the user to the capture. A “hand grip” is a grip having dimensions suitable for gripping a hand, a “foot grip” is a grip that is sized so that it can be gripped by the foot of the foot, and a “finger grip” is a grip that It is sized so that it can be captured with one or more fingers.
Анкер 110 обеспечивает опору для удлиненного элемента 120, который выполнен с возможностью совершения некоторого количества движений. Конкретно, взаимодействие анкера 110 и удлиненного элемента 120 обеспечивает размещение удлиненного элемента вдоль анкера и может также обеспечить сопротивление движению удлиненного элемента вдоль анкера. Предпочтительно, сопротивление является значительным, так что при некоторых обстоятельствах опора предотвращает перемещение удлиненного элемента 120 вдоль анкера 110 даже там, где имеется некоторое несоответствие сил на концах удлиненного элемента. Таким образом, тренажер 100 может быть использован для большого разнообразия упражнений путем, например, изменения длины удлиненного элемента 120, а также для оказания поддержки пользователю во время выполнения упражнений.
Один тип опоры, упомянутый в этом документе, без ограничения, является "фрикционной опорой". Анкеры, которые обеспечивают фрикционную опору, включают, но не ограничены этим, элемент или часть элемента, который может поддержать удлиненный элемент 120 во время выполнения упражнений и по которому может скользить удлиненный элемент. Сопротивление движению удлиненного элемента 120 по анкеру 110 может быть частично определено фрикционным сопротивлением удлиненного элемента, скользящего по анкеру. В нескольких вариантах выполнения способов использования тренажера 100 удлиненный элемент 120 скользит вдоль анкера 110, когда пользователь размещает себя по отношению к тренажеру. Во время выполнения упражнений небольшое несоответствие в силах натяжения, действующих на захват, выравнивается статическим трением фрикционной опоры, и захваты не перемещаются во время выполнения упражнений. Таким образом, статическое трение между удлиненным элементом 120 и анкером 110, создаваемое фрикционной опорой, является достаточным для обеспечения возможности выполнения упражнений, в которых удлиненный элемент 120 не скользит через анкер 110 во время выполнения упражнений. Средства, которые обеспечивают фрикционную опору, включают элементы или части элементов, которые образуют часть анкера или которые присоединены к нему, и которые могут поддерживать удлиненный элемент (который может, например, включать захват), и которые могут обеспечивать возможность скольжения удлиненного элемента вдоль анкера и обеспечивать фрикционное сопротивление движению удлиненного элемента во время выполнения упражнений.One type of support mentioned in this document, without limitation, is a "friction support". Anchors that provide frictional support include, but are not limited to, an element or part of an element that can support the
Анкер 110 используется, чтобы обеспечить неподвижную точку крепления тренажера 100 и поддерживать вес пользователя, когда он приложен к плечам 122, как показано стрелкой F на Фиг.2 и показано на Фиг.3. Как показано на Фиг.2, анкер 110 предназначен для расположения тренажера 100 на двери и обеспечения поддержки удлиненному элементу 120 при помощи увеличенной части 111, части 113, которая может быть лентой или шнуром, и приблизительно треугольной петли 115 для скользящей поддержки удлиненного элемента. При помощи увеличенной части 111 на стороне двери D, противоположной удлиненному элементу 120, анкер 110 поддерживает вес пользователя, когда тот тянет захваты 123. Кроме того, анкер 110 обеспечивает установку относительной длины плеч 122, как показано на Фиг.1 двойной стрелкой С. Таким образом, общая длина удлиненного элемента 120 и распределение этой длины между каждым из плеч 122 может легко регулироваться механизмом 135 удлинения и натяжением концов удлиненного элемента. Фиг.2 показывает плечи 122, каждое из которых имеет длину L.
При наличии поддерживающей конструкции, такой как дверь D (показана на Фиг.1-3) или поручень, стойка или другой поддерживающий элемент (как показано, например, на Фиг.14В и 26), тренажер, выполненный в соответствии с изобретением, обеспечивает для пользователя пару захватов, чтобы выполнять упражнения с использованием своего веса, в соответствии с расположением пользователя относительно устройства, и обеспечивает простую регулировку длины устройства. Как описано ниже, предложенное устройство может использоваться для упражнений в одном из большого числа положений в соответствии с выбранной регулируемой длиной и согласно тому, где и как пользователь стоит относительно тренажера. В целом пользователь устанавливает требуемую длину тренажера, располагается на полу вблизи него, опирает часть веса своего тела на тренажер при помощи рук или ног и упражняется, перемещая свое тело, с весом, поддерживаемым полом и тренажером. Примеры опоры на пол и тренажер включают, но не ограничиваются, положением стоя на одной или обеих ногах, лежа на животе или спине, стоя на коленях или располагая руки на полу, и тренажер поддерживает вес пользователя через руки или ноги.In the presence of a supporting structure, such as a door D (shown in FIGS. 1-3) or a handrail, stand or other supporting element (as shown, for example, in FIGS. 14B and 26), a simulator made in accordance with the invention provides for the user a pair of grips to perform exercises using their weight, in accordance with the location of the user relative to the device, and provides an easy adjustment of the length of the device. As described below, the proposed device can be used for exercises in one of a large number of positions in accordance with the selected adjustable length and according to where and how the user stands relative to the simulator. In general, the user sets the required length of the simulator, settles down on the floor near it, rests part of the weight of his body on the simulator with his hands or feet, and exercises by moving his body with the weight supported by the floor and the simulator. Examples of resting on the floor and the simulator include, but are not limited to, standing on one or both legs, lying on your stomach or back, kneeling or with your hands on the floor, and the simulator supports the user's weight through arms or legs.
В альтернативном варианте выполнения (не показан) удлиненный элемент 120 не содержит удлиняющий механизм 135. В этом варианте выполнения удлиненный элемент 120 является по существу неэластичным и имеет постоянную длину S между парой захватов 123.In an alternative embodiment (not shown), the
На Фиг.3 пользователь U показан в одном из многих положений для упражнения, в частности упражнения тяги в стойке верхнего ряда, с захватом руками пользователя пары захватов 123 и ногами пользователя, расположенными на расстоянии Х по горизонтали от точки А крепления анкера. При креплении к двери предпочтительно, чтобы точка А крепления анкера находилась на внутренней стороне двери (т.е. дверь открывается наружу от пользователя U), для того чтобы косяк J мог поддерживать вес пользователя. Пользователь U показан отклонившимся от точки А крепления анкера и поддерживающим часть своего веса с помощью устройства 100. Очевидно, что пользователь U может изменять величину поддерживаемого веса и, таким образом, сопротивление тренажера 100 посредством регулирования своего положения относительно точки А крепления анкера (расстояние X) и длины плеч 122 (длины L). Пользователь U на Фиг.3 выполняет упражнение тяги в стойке верхнего ряда, перемещая свое тело в направлении Е вперед и назад от точки А крепления анкера. Заметим, что для пользователя в этом положении возможны и другие упражнения посредством движения пользователя в других направлениях, причем вес пользователя поддерживается полом и тренажером 100.In Fig. 3, user U is shown in one of many positions for exercises, in particular, traction exercises in an upright posture, with the user grabbing a pair of
Несколько вариантов выполнения будут теперь описаны со ссылкой на чертежи. Эти варианты выполнения предназначены, чтобы быть иллюстративными и не ограниченными объемом изобретения. Фиг.4-9 представляют собой различные виды второго варианта выполнения тренажера 400. Обратимся сначала к Фиг.4, на которой показан вид в аксонометрии тренажера 400, который включает первый вариант выполнения анкера 410 и удлиненного элемента 420. Тренажер 400, анкер 410 и удлиненный элемент 420 в целом аналогичны, соответственно, тренажеру 100, анкеру 110 и удлиненному элементу 120 за исключением описанных ниже деталей. Где только возможно, подобные элементы на Фиг.1-9 обозначены идентичными номерами позиций.Several embodiments will now be described with reference to the drawings. These embodiments are intended to be illustrative and not limited by the scope of the invention. 4-9 are various views of a second embodiment of a
Анкер 410 содержит неупругую гибкую ленту 413, имеющую увеличенный первый конец 411, который шире, чем лента, и второй конец, который образует петлю 415. Удлиненный элемент 420 проходит через петлю, ограничивая пару плеч 422, обозначенных как плечо 422а и 422b. Каждое плечо 422 имеет соответствующие концы 421а и 421b, каждый из которых образует петлю 425, показанную как петля 425а и 425b, чтобы поддерживать один из пары захватов 423, показанных как захват 423а и 423b. Удлиненный элемент 420 также содержит пару удлиняющих устройств или пряжек 435, показанных как пряжка 435а и 435b, на каждом конце центральной ленты 429. Одна или обе пряжки 435 обеспечивают регулировку длины удлиненного элемента 420. Конкретно, лента 429 имеет пару концов 431, показанных как 431а и 431b, которые проходят через пряжки, соответственно, 435а и 435b. Как описано далее, удлиненный элемент 420 по существу неупругий, причем его длина может регулироваться посредством одной или обеих пряжек 435.
Фиг.4, 5А и 5В изображают несколько видов анкера 410, при этом Фиг.5А является видом анкера в аксонометрии, а Фиг.5В является разрезом анкера по линии 5В-5В. Как отмечено выше, анкер 410 содержит неупругую гибкую ленту 413. В одном варианте выполнения большая часть длины анкера 410 и удлиненного элемента 420 выполнена из материалов, которые включают, но не ограничиваются, тканые полосы из натурального или синтетического материала, имеющего достаточную прочность, чтобы поддерживать вес пользователя устройства. Тканые материалы включают, но не ограничены этим, один или несколько материалов, выбранных из нейлона, полипропилена или других полимерных волокон. Нужно понимать, что отдельная длина гибкого материала может в качестве альтернативы содержать две или большее количество частей, которые сшиты, склеены, или иным образом прикреплены друг к другу. В одном варианте выполнения длина ленты 413 составляет от 15,24 см до 45,72 см (от 6 до 18 дюймов). В другом варианте выполнения длина ленты 413 составляет приблизительно 30,48 см (12 дюймов).Figures 4, 5A and 5B depict several types of
Лента 413 имеет увеличенный первый конец 411, который шире нее, и второй конец 417, который прикреплен к ленте так, чтобы образовывать петлю 415. Как показано на Фиг.5В, лента 413 имеет конец 502, образующий сердцевину первого конца 411. Так как одно из предполагаемых применений анкера 410 состоит в том, чтобы закрепить тренажер 400 между дверью и косяком, предпочтительно, чтобы конец 411 включал материалы, достаточно мягкие, чтобы не нанести повреждения деревянной двери или дверной раме, но при этом достаточно прочные, чтобы поддерживать вес пользователя. Один вариант выполнения, мягкий, но прочный, показан на Фиг.5В. Конкретно, конец 502 ленты частично окружен кожухом 505 с выемкой и подушкой 507, которая покрывает конец ленты и корпус. Конец 502 ленты может, кроме того, удерживаться внутри конца 411 путем приклеивания и пришивания конца ленты к кожуху 505 и подушке 507 и путем закрытия подушки по меньшей мере одним швом 509. Лента 413 проходит в первый конец 411 через щель 504 в кожухе 505 и щель 501 в подушке 507. В предпочтительном варианте первый конец 411 имеет размеры приблизительно 8,89 см на 6,35 см (3,5′′ на 2,5′′) и ориентирован приблизительно перпендикулярно ленте 413. Предпочтительно также, чтобы кожух 505 был изготовлен из пены высокой плотности с замкнутыми ячейками, а подушка 507 была изготовлена из войлока и содержала швы 503. В альтернативном случае вторая лента или кусок другого материала могут быть пришиты, приклеены или иным образом прикреплены к концу ленты 413, чтобы образовать конец 502. В другом альтернативном варианте кожух 505 может содержать другой жесткий элемент, такой как пластина из металла или жесткой пластмассы, чтобы увеличить жесткость конца 411 ленты.The
Удлиненный элемент 420 показан более подробно на Фиг.6-9. Фиг.6 является схематическим видом сверху удлиненного элемента, Фиг.7 является видом в аксонометрии одного из пары захватов 423 и соответствующей одной из пары пряжек 435, Фиг.8 является разрезом по линии 8-8 одного из пары захватов 423, и Фиг.9А является видом в аксонометрии, показывающим детали одной из пары пряжек и примыкающей ленты 429. Как показано на Фиг.6, удлиненный элемент 420 имеет длину S и содержит две неупругие части 427 ленты, показанные как 427а и 427b, ленту 429 и пару пряжек 435 для регулировки длины S. Часть удлиненного элемента 420 от каждого конца до ближайшей пряжки имеет фиксированную длину - т.е. каждая из двух частей от одного из пары концов 421 до соответствующей одной из пары пряжек 435 имеет фиксированную длину. В одном варианте выполнения длина S выполнена с возможностью регулировки по всей длине, что обеспечивает возможность выполнения широкого диапазона упражнений. Таким образом, в качестве примера и без ограничения, длина S может изменяться приблизительно от 1,83 м до 3,66 м (от 6 до 12 футов). В другом варианте выполнения ширина удлиненного элемента 420 приблизительно равна 3,81 см (1,5 дюйма). При использовании для выполнения упражнений ремень 429 и петля 415 могут перемещать скольжением удлиненный элемент 420 вдоль анкера 410, в то же время обеспечивая достаточное трение, чтобы могло быть некоторое несоответствие в силах на двух концах 421 без проскальзывания удлиненного элемента через анкер, когда пользователь выполняет упражнения.An
Детали одного из пары концов 421, включая ленту 429 до захвата 423 и пряжку 435, показаны на Фиг.7, 9А и 9В. Пряжка 435 является кулачковой пряжкой, конструкция и применение которой хорошо известно в технике. Пряжка 435 прикреплена к ленте 427, и, таким образом, длина каждого из концов 421 не имеет возможности регулировки. Пряжка 435 также зацепляет с возможностью скольжения и захватывает ленту 429, обеспечивая возможность регулировки длины S.Details of one of the pair of
Пряжка 435 имеет рамку 709, перекладину 705 для первой ленты, перекладину 707 для второй ленты и перемещаемый пользователем кулачок 711. Перекладина 705 поддерживает петлю ленты 427, которая предпочтительно крепится швами 703. В альтернативном случае лента 427 может быть прикреплена к перекладине 705 через второй элемент, такой как другая лента в виде петли или элемент из пластмассы или металла, который огибает петлей перекладину 705 и обеспечивает место для крепления ленты 427. Лента 427 имеет противоположный конец, который скреплен швами 701, чтобы образовать петлю 425 для крепления захвата 423, как описано далее. Перекладина 707 для второй ленты и кулачок 711 поддерживают ленту 429. Понятно, что использование швов, как здесь описывается, чтобы закрепить части лент, можно заменить использованием других способов крепления, таких как склеивание или сплавление частей ленты друг с другом.The
Кулачок 711 подпружинен так, что в нормальном состоянии он удерживает ленту 429, а под воздействием пользователя, таким как толкание или оттягивание кулачка, он перемещается, позволяя перемещаться ленте. Расстояние между кулачком 711 и перекладиной 707 регулируется пользователем и пружиной в пряжке 435 путем нажима на кулачок 711, позволяя ленте 429 скользить между кулачком 711 и перекладиной 707. Таким образом, длина S может регулироваться пользователем путем воздействия на кулачок 711 пряжки 435.The
Захват 423 показан более подробно в разрезе на Фиг.8. Захват 423 имеет в целом трубчатую форму с наружной оболочкой 801 и внутренней цилиндрической трубчатой частью 803. Оболочка 801 имеет такие длину и внешний диаметр, которые позволяют легко браться рукой за захват 423, и выполнена из материала, который обеспечивает возможность пользователю удерживать ее во время выполнения упражнений. В одном варианте выполнения материал оболочки 801 является пенопластом высокой плотности. Часть 803 обеспечивает прочность захвата 423 и может быть выполнена из пластмассы или другого жесткого материала с такими диаметром и длиной, чтобы согласовываться с размерами оболочки 801 и обеспечивать наличие пространства для прохождения петли 425 через центр части 803. Часть 803 предпочтительно выполнена из жесткого и легкого материала, такого как трубка из ПВХ (PVC).The
Один из пары свободных концов 431 показан более подробно на Фиг.9А. Каждый конец 431 предпочтительно отогнут назад и удерживается на месте, например, посредством шва 901, чтобы образовать легко управляемый конец. Удлиненный элемент 420 также содержит несколько рукавов, показанных как рукава 903, 905а и 905b, которые дважды огибают ленту 429, чтобы предотвратить перемещение концов 431. Конкретно, рукава 903 и 905 расположены между пряжками 435, концами 431 и лентой 429. Таким образом, рукава 903 и 905 удерживают часть ленты 429 от пряжки 435 до соответствующего конца 431 от перемещения, когда перемещается тренажер 420. Как показано на Фиг.9А, рукав 903 закреплен около конца 431, в то время как рукава 905 могут скользить по длине ленты 429. Фиг.9В является разрезом по линии 9В-9В, показанной на Фиг.9А, показывающим детали кулачковой пряжки и крепление рукава 905b. В частности, Фиг.9В показывает перекладину 907, которая перекрывает пряжку 435, и ленту 909, которая прикреплена как к перекладине, так и к рукаву 905b. Лента 909 удерживает рукав 905b от соскальзывания слишком далеко по ленте 429 во время регулировки длины тренажера. Предпочтительно, чтобы рукава 905b были упругими, чтобы они могли легко перемещаться и удерживать вместе части ленты 429.One of the pair of free ends 431 is shown in more detail in FIG. 9A. Each
АЛЬТЕРНАТИВНЫЕ ВАРИАНТЫ ВЫПОЛНЕНИЯ АНКЕРАALTERNATIVE ANCHOR OPTIONS
Несколько вариантов выполнения анкера изображены на Фиг.14А, 14В, 23-26 и 29-32А-32С. За исключением тех мест, где это указано явным образом, любой из анкеров может быть использован для поддержания любого из удлиненных элементов тренажера. В последующем обсуждении варианты выполнения анкера предназначены быть иллюстративными, а не ограничивающими. Таким образом, в качестве примера и без ограничения, варианты выполнения тренажера могут быть прикреплены в двери, вокруг рейки, поручня или подпорки, от крюка, установленного в стене, или могут быть намертво прикреплены к стене или, например, к тренажерной конструкции.Several embodiments of the anchor shown in Fig.14A, 14B, 23-26 and 29-32A-32C. Except where explicitly indicated, any of the anchors may be used to support any of the elongated elements of the simulator. In the following discussion, embodiments of the anchor are intended to be illustrative and not restrictive. Thus, as an example and without limitation, embodiments of the simulator can be attached to the door, around the rail, handrail or support, from a hook mounted in the wall, or can be tightly attached to the wall or, for example, to the training structure.
Фиг.14А представляет собой второй вариант выполнения анкера 1410, который может быть использован для крепления тренажера к стойке или поручню, а Фиг.14В представляет собой вариант выполнения тренажера, прикрепленного анкером к стойке с использованием альтернативного варианта выполнения анкера, по сравнению с показанным на Фиг.14А.FIG. 14A is a second embodiment of an
Фиг.14А изображает альтернативный вариант анкера 1410, который содержит регулируемую петлю 1419 и анкерную петлю 1415. Как описано далее, анкер 1410 является альтернативным анкером и может, например, содержать анкерную петлю 1415 для приема удлиненного элемента 420, чтобы образовать тренажер 1400. В качестве альтернативы, анкер 1410 может поддерживать удлиненный элемент 120 или любой другой из описанных здесь удлиненных элементов. Регулируемая петля 1419 образована гибкой лентой 1411 и кулачковой пряжкой 1412 следующим образом. Кулачковая пряжка 1412 может быть, например, кулачковой пряжкой 435, показанной подробно на Фиг.9В. Гибкая лента 1411 имеет свободный первый конец 1414, который продет через кулачковую часть кулачковой пряжки 1412, например, путем продевания ленты между второй перекладиной 707 ленты и подвижным кулачком 711 кулачковой пряжки 435. Гибкая лента имеет также второй конец 1418, который прикреплен к кулачковой пряжке 1412, например, путем обертывания второго конца вокруг перекладины первой ленты 705 кулачковой пряжки 435 и выполнения шва 1416 через двойную толщину ленты 1411. Лента 1411, продетая таким образом через пряжку 1412, образует регулируемую петлю 1419, размер которой может быть увеличен или уменьшен путем приведения в действие кулачковой пряжки 1412, чтобы освободить ленту 1411, перемещая ленты через кулачковую пряжку и отпуская кулачок. Конец 1414 удерживается на ленте 1411 ненатянутым рукавом 1413. Анкерная петля 1415 прикреплена к ленте 1411 посредством шва 1417.14A depicts an
Предпочтительно, чтобы большинство отрезков анкера 1410 было выполнено из материалов, которые включают, но не ограничиваются этим, тканые полосы из натурального или синтетического материала, имеющего достаточную прочность, чтобы поддерживать вес пользователя устройства. Предпочтительные тканые полосы включают, но не ограничиваются этим, тканые полосы, выполненные из нейлона, полипропилена или других полимерных волокон. Понятно, что отдельный отрезок гибкого материала в соответствии с альтернативными вариантами настоящего изобретения может содержать по меньшей мере две части, которые сшиты, склеены или иным образом соединены друг с другом.Preferably, most segments of
Фиг.14В показывает тренажер 1400, образованный из анкера 1410 и удлиненного элемента 420. Регулируемая петля 1419 анкера 1410 затянута вокруг стойки Р, например, путем надевания регулируемой петли через верхушку стойки и затягивания с использованием кулачковой пряжки 1412. В альтернативном случае лента 1411 может быть вынута из кулачковой пряжки 1412, обернута вокруг стойки Р и затем продета через кулачковую пряжку и затянута. В любом случае конец 1414 протягивается через кулачковую пряжку 1412, а регулируемая петля 1419 затягивается вокруг стойки Р с силой, достаточной, чтобы обеспечить возможность тренажеру 1400 поддерживать вес пользователя.FIG. 14B shows a
Кроме того, что анкер 1410 крепится к стойке, он может быть натянут, чтобы поддерживать тренажер 1400, вокруг поручня, столба или другого элемента. В альтернативном случае анкер может быть прикреплен к карабину, который прикреплен к стене или к другой конструкции.In addition, the
На Фиг.23 изображен третий вариант выполнения анкера 2300, содержащего гибкий ремень 2301 с первым концом 2305, имеющим петлю 2307, удерживаемую на месте швом 2311, и вторым концом 2303, имеющим кольцо 2304, удерживаемое в петле, созданной посредством шва 2309, а Фиг.24 иллюстрирует использование анкера 2300 для крепления удлиненного элемента 420, который также может быть удлиненным элементом 120, к дереву. В одном варианте выполнения кольцо 2304 представляет собой отпираемое кольцо, такое как карабин. В другом варианте выполнения кольцо 2304 представляет собой кольцо с защелкой. Предпочтительно, чтобы большинство отрезков ленты 2301 были выполнены из материалов, которые включают, но не ограничиваются этим, тканые ленты из натурального или синтетического материала, имеющего прочность, достаточную, чтобы поддерживать вес пользователя. Предпочтительные тканые полосы включают, но не ограничиваются этим, тканые полосы, выполненные из нейлона, полипропилена или других полимерных волокон. Фиг.24 показывает тренажер 2400, состоящий из анкера 2300 и удлиненного элемента 420. Лента 2103 обернута вокруг дерева с карабином 2304, принимающим ленту. Петля 2301 принимает ленту 429, обеспечивая возможность пользователю выполнять упражнения вблизи дерева или другого объекта, достаточно малого, чтобы его можно было обернуть лентой 2101.FIG. 23 shows a third embodiment of an
На Фиг.25 и 26 изображена скоба 2500 для фиксации анкера, как, например, первого конца 411 анкера 410, причем Фиг.25 показывает вид скобы в аксонометрии спереди, а Фиг.26 иллюстрирует использование скобы для крепления тренажера. Скоба 2500 имеет первый фланец 2503 с монтажным отверстием 2509, второй фланец 2505 с монтажным отверстием 2511 и переднюю поверхность 2507, которая проходит от первого до второго фланца и имеет щель 2515, которая проходит в край 2513 поверхности и содержит центральную щель 2517. В предпочтительном варианте выполнения скоба 2500 выполнена из цельного листа 2501 листового металла, например, такого, который имеет сгиб 2518 во фланце 2503, сгиб 2523 во фланце 2505 и сгибы 2519 и 2521 между передней поверхностью 2507 и фланцами, соответственно, 2503 и 2505. В одном варианте выполнения толщина листа 2501 находится в диапазоне от 1,27 мм до 2,54 мм (от 0,05 до 0,1 дюйма) или более предпочтительно 1,5875 мм (0,0625) дюйма, а сгибы 2518, 2519, 2521 и 2523 расположены так, чтобы передняя поверхность 2507 была параллельна фланцам 2503 и 2505 и отделена от них расстоянием D приблизительно от 25,4 мм до 50,8 мм (от 1 до 2 дюймов), или более предпочтительно 38,1 мм (1,5 дюйма). Монтажные отверстия 2509 и 2511 предпочтительно имеют диаметр приблизительно от 6,35 мм до 1,27 мм (от 1/4 дюйма до 1/2 дюйма), и более предпочтительно примерно 9,525 мм (3/8 дюйма).25 and 26 depict a
На Фиг.26 проиллюстрировано использование скобы 2500. Скоба 2500 установлена на стенке W и удерживается на месте парой винтов 2601, проходящих через монтажные отверстия 2509 и 2511. Часть анкера 410 показана пунктиром в правой части Фиг.26, а именно увеличенная часть 411 и гибкая лента 413. Анкер 410 помещается в скобе 2500, как показано стрелкой. Конкретно, лента 413 проскальзывает через щель 2515 в грани 2513 передней поверхности, при этом увеличенная часть находится между скобой 2500 и стенкой W, и в центральную щель 2517. Щель 2515 имеет размер достаточно большой, чтобы обеспечить возможность ленте 413 скользить через щель, но не настолько большой, чтобы обеспечить возможность увеличенной части 411 проходить через щель. Использование скобы 2500 обеспечивает возможность установки тренажера 400, который ранее был показан установленным на дверном косяке, на любой стене, на которой может быть смонтирована скоба.26 illustrates the use of the
АЛЬТЕРНАТИВНЫЕ ВАРИАНТЫ ВЫПОЛНЕНИЯ ЗАХВАТАALTERNATIVE CAPTURE OPTIONS
Использование тренажера 100 определяется захватами, которые доступны для пользователя. Захваты позволяют пользователю осуществлять захват, как, например, осуществляя зажим с достаточной силой, чтобы поддерживать свой вес, и содержат устройства, которые могут удерживать пользователя в пределах петли или крючка, когда пользователь тянет к себе тренажер. В этом контексте "выполненная с возможностью захвата" часть относится к способности либо обернуть часть тела вокруг и сжать эту часть захвата, либо продеть часть тела через петлю или крюк захвата так, чтобы пользователь мог осуществлять натяжение тренажера и удерживать часть тела внутри захвата.The use of the
Захваты годятся для использования для приложения силы к различным частям тела, включая шею, всю кисть или часть кисти, руки, ноги, пальцы ног или пятки. Несколько вариантов выполнения захватов описаны здесь как захваты, которые могут использоваться, например, и без ограничения, рукой, ногой или пальцами. Захваты, описанные здесь, могут представлять собой неотъемлемую часть устройства 100 или, в качестве альтернативы, могут быть присоединены, или выполнены с возможностью присоединения к одной из пары захватов, которые являются частью тренажера, включая, но не ограничиваясь, захваты 123. Термин дополнительное захватное "приспособление" используется здесь, чтобы описать захват, который может быть присоединен к существующему захвату тренажера 100. Нужно понимать, что объем настоящего изобретения также распространяется на всю информацию о дополнительных захватных приспособлениях в тренажере 100.Grips are suitable for use to apply force to various parts of the body, including the neck, the entire hand or part of the hand, arms, legs, toes or heels. Several embodiments of the grips are described herein as grips that can be used, for example, and without limitation, with the hand, foot, or fingers. The grips described herein may be an integral part of the
Пользователь может выбирать, упражняться ли ему с парой захватов, имеющих одинаковые или различные дополнительные приспособления или без дополнительного захватного приспособления. Кроме того, несколько вариантов выполнения тренажера содержат часть для крепления захвата, чтобы выполнять крепление захвата тренажера с возможностью снятия, такого как тренажер 100 или любой тренажер, имеющий два захвата, и часть, которая выполнена с возможностью захвата рукой, ногой, пальцами или другими частями тела. Использование дополнительных захватных приспособлений позволяет пользователю создать дополнительную нагрузку на кисть или пальцы, предусматривая различные типы захвата для кисти или пальцев, и позволяет выполнять дополнительные упражнения, как, например, с дополнительными захватными приспособлениями для ступни. Кроме того, пара захватов может быть соединена, как это обсуждалось со ссылкой на Фиг.16А и 16В, обеспечивая возможность пользователю выполнять упражнения, используя одно дополнительное захватное приспособление.The user can choose whether to exercise with a pair of grips having the same or different additional devices or without additional gripping devices. In addition, several embodiments of the simulator comprise a grip attachment portion for removing the grip of the simulator attachment, such as the
Один альтернативный вариант выполнения показан на Фиг.10 и 11, причем Фиг.10 представляет собой схематический вид сверху альтернативного удлиненного элемента 1020, имеющего в качестве удлиняющего устройства одну кулачковую пряжку 435, и два захвата 4001 для пальцев, а Фиг.11 изображает вид в разрезе, взятом по линии 11-11, альтернативного захвата для пальцев. Использование одной пряжки 435 обеспечивает более легкий тренажер 400, но приводит к меньшему полезному диапазону длин для удлиненного элемента 1020. Захват 4001 для пальцев имеет четыре отверстия 4101 для пальцев пользователя и обеспечивает возможность выполнения упражнений одного или большего количества мышц пальца.One alternative embodiment is shown in FIGS. 10 and 11, wherein FIG. 10 is a schematic top view of an alternative
Одним примером дополнительного захватного приспособления является захватное приспособление 1700 для ступни, которое показано на Фиг.17А-17В прикрепленным к захватам 123 тренажера 100. В частности, Фиг.17А показывает дополнительное захватное приспособление 1700 для ступни, прикрепленное к тренажеру 100 и захваченное носками ног Т, а Фиг.17В показывает пару дополнительных захватных приспособлений для ступни, по одному на каждом из пары захватов 123, и в каждый вставлена одна из пяток Н1 и Н2 пользователя. Каждое дополнительное захватное устройство 1700 для ступни имеет гибкую петлю 1710 и часть 1720 для крепления захвата. Предпочтительно, чтобы часть петли 1710, которая проходит от захвата 123, составляла приблизительно 30,48 см (12 дюймов) в длину, чтобы обеспечить достаточно места либо для пятки пользователя, либо для носка, вставленного в петлю. В случае закрепленного таким образом дополнительного захватного приспособления 1700 для ступни носки (Фиг.17А) или пятка (Фиг.17В) могут быть продеты через петлю 1710, и посредством ступни может быть приложена сила к тренажеру 100.One example of an additional gripper is a
Предпочтительно, чтобы большая часть дополнительного захватного приспособления 1700 для ступни была выполнена из материалов, которые содержат, но не ограничиваются этим, тканые полосы из натурального или синтетического материала, имеющего достаточную прочность, чтобы поддерживать вес пользователя. Предпочтительные тканые полосы содержат, но не ограничиваются этим, тканые полосы из полимерного волокна, например нейлона или полипропилена или какого-либо другого полимерного волокна. Подразумевается, что отрезок гибкого материала может, в качестве альтернативы, содержать по меньшей мере две части, которые сшиты, склеены или прикреплены друг к другу иным образом.Preferably, most of the
В первом варианте дополнительного захватного приспособления 1700 для ступни гибкая петля 1710 присоединена с возможностью удаления, как рассматривается далее, к одному из пары захватов 123. Конкретный вариант выполнения дополнительного захватного приспособления 1700 для ступни показан на Фиг.18А-D, при этом Фиг.18А является видом в аксонометрии дополнительного захватного приспособления для ступни, Фиг.18В является видом снизу дополнительного захватного приспособления для ступни, Фиг.18С является видом сбоку части одной из частей для крепления захвата, а Фиг.18D является видом сверху части одной из частей для крепления дополнительного захватного приспособления. Как показано на Фиг.18А и 18В, захват 1700 для ступни образовано из трех лент: ленты 1801 петли и двух лент 1803 крепления. С тремя прикрепленными лентами, как описывается далее, лента 1801 петли образует петлю 1710, а две ленты 1803 крепления образуют часть 1720 для крепления захвата.In a first embodiment of the foot
Лента 1801 петли выполнена из отрезка ленты, концы которого соединены с образованием петли. Лента 1801 петли предпочтительно является тканой полосой из полимерного волокна 50,8 см (20 дюймов) длиной и 3,81 см (1,5 дюйма) шириной. В предпочтительном варианте петля содержит две дважды прошитые части 1815 треугольной формы, одна из которых соединяется с двумя концами ленты 1801 петли. Каждая из двух лент 1803 крепления захвата образована из отрезка ленты, имеющего первый конец 1807 с первой поверхностью 1809 для крепления и второй конец 1811 со второй поверхностью 1813 для крепления. Ленты 1803 крепления предпочтительно являются ткаными полосами из полимерного волокна. В одном варианте выполнения ленты 1803 имеют длину 19,05 см (7,5 дюймов) и ширину 3,81 см (1,5 дюйма). Поверхности 1809 и 1813 для крепления, в одном варианте выполнения, прикреплены к ленте 1801 петли путем двойного прошивания 1817, а ленты 1803 крепления захвата предпочтительно присоединены к ленте петли посередине между концами 1807 и 1811 путем двойного прошивания 1805.The
Каждая лента 1803 крепления содержит на противоположных сторонах поверхности 1809 и 1813 для крепления. В одном варианте выполнения поверхности 1809 и 1813 для крепления являются сопряженными поверхностями, такими как согласованные поверхности с крюками и петлями системы крепления крюками и петлями, такой как крепление, известное под товарным знаком VELCRO®. В одном варианте выполнения каждая поверхность 1809 и 1813 для крепления имеет размеры приблизительно 5,08 см на 3,175 см (2 на 1,25 дюйма).Each
Дополнительное захватное приспособление 1700 для ступни может прикрепляться с возможностью снятия и используется, как описано далее. Часть 1720 крепления захвата дополнительного захватного приспособления 1700 для ступни может прикрепляться с возможностью снятия к одному из пары захватов 123 путем оборачивания всей длины каждой ленты 1803 вокруг захвата 123а и создания контакта поверхностей 1809 и 1813 для крепления на каждой ленте 1803. Прошивка 1815 позволяет петле 1710 открываться без скручивания и обеспечивает крепежную ленту для крепления ступни.The
Другим примером дополнительного захватного приспособления является дополнительное захватное приспособление 1900 для пальцев, которое проиллюстрировано на Фиг.19А-19С для трех различных упражнений, когда оно прикреплено к захватам 123 тренажера 100. Захватное приспособление 1900 для пальцев имеет петли 1910, предназначенные для приема и захвата большим пальцем и одним или большим количеством других пальцев, и часть 1920 для крепления захвата для крепления приспособления к захвату тренажера. Часть 1920 для крепления захвата может прикрепляться с возможностью снятия к одному из пары захватов 123. В одном варианте выполнения имеются две петли 1910: первая петля 1910а и вторая петля 1910b. Когда дополнительное захватное приспособление 1900 для пальцев прикреплено таким образом, палец F1 может быть продет через одну из петель, например первую петлю 1910а, как показано на Фиг.19А, палец F1 может быть продет через первую петлю, а палец F2 может быть продет через вторую петлю 1910b, как показано на Фиг.19В, или два пальца F1 и F2 могут быть продеты через первую петлю, а палец F3 и палец F4 могут быть продеты через вторую петлю, как показано на Фиг.19С.Another example of an additional gripper is an
В одном варианте каждый из пары захватов 123 снабжен одним дополнительным захватным приспособлением 1900 для пальцев. Когда палец или пальцы таким образом продеты по меньшей мере через одну из петель 910, сила может быть приложена посредством натяжения тренажера 100. Дополнительное захватное приспособление 1900 для пальцев имеет такие же функциональные возможности, что и захваты 4001 для пальцев.In one embodiment, each of the pair of
Конкретный вариант дополнительного захватного приспособления 1900 для пальцев показан на Фиг.20А-С, где Фиг.20А представляет собой вид в аксонометрии дополнительного захватного приспособления для пальцев, Фиг.20В представляет собой вид сверху дополнительного захватного приспособления для пальцев по линии 20В-20В, и Фиг.20С представляет собой вид сбоку дополнительного захватного приспособления для пальцев в разрезе по линии 20С-20С. Дополнительное захватное приспособление 1900 для пальцев содержит две петли 1910 - первую петлю 1910а и вторую петлю 1910b, а часть 1920 для крепления захвата содержит три части 1920а, 1920b, 1920с. Более конкретно, дополнительное захватное приспособление 1900 для пальцев образовано из пяти лент: ленты 2001 петли, трех лент 1803 крепления и ленты 2003 основы. С пятью лентами, прикрепленными, как описано далее, лента 2001 петли образует первую петлю 1910а и петлю 1910b для пальцев, в каждую из которых может быть вставлен один или большее количество пальцев, причем каждая из трех лент 1803 крепления образует одну из частей 1920а, 1920b, 1920с для крепления захвата. Предпочтительно, чтобы большая часть захвата 1900 для пальцев была выполнена из того же материала, что и захват 1700 для кисти руки.A specific embodiment of the
В одном варианте выполнения лента 2001 петли выполнена из тканой полосы из полимерного волокна, имеющей длину 54,61 см (21.5 дюйма) и ширину 2,54 см (1 дюйм), и лента 2003 основы является тканой полосой из полимерного волокна, имеющей длину 5,08 см (2 дюйма) и ширину 2,54 см (1 дюйм). Дополнительное захватное приспособление 1900 для пальцев скреплено тремя швами 2007, каждый из которых проходит через одну из трех лент 1803 крепления и через ленту 2001 петли и ленту 2003 основы. В предпочтительном варианте выполнения швы 2007 являются дважды прошитыми участками. Как показано на Фиг.20А и 20С, часть ленты 2001 петли выступает между каждой из трех лент 1803 крепления, чтобы образовать петли 1910а и 1910b. Предпочтительно, чтобы петли 1910а и 1910b были образованы из отрезков ленты 1901 петли, которые имеют длину приблизительно 20,32 см (8 дюймов). Лента 2001 петли предпочтительно превышает длину ленты 2003 основы на длину двух петель 1910а и 1910b между смежными лентами 1803 крепления.In one embodiment, the
Дополнительное захватное приспособление 1900 для пальцев может прикрепляться с возможностью снятия и используется следующим образом. Часть 1920 для крепления захвата приспособления 1900 может прикрепляться с возможностью снятия к одному из пары захватов 123 посредством контакта поверхностей 1809 и 1813 для крепления на каждой ленте 1803. Когда дополнительное захватное приспособление 1900 для пальцев закреплено таким образом, палец может быть продет через одну из петель, например петлю 1910а, как показано на Фиг.20А, причем один палец может быть продет через каждую петлю 1910а и 1910b, как показано на Фиг.20В, или же два пальца могут быть продеты через каждую петлю 1910а и 1910b, как показано на Фиг.20С. Когда палец или пальцы продеты таким образом по меньшей мере через одну из петель 1910, пользователь может приложить силу к тренажеру 100.The
Третьим примером дополнительного захватного приспособления является дополнительное захватное приспособление 2100, которое показано на Фиг.21А-21С прикрепленным к захватам 123 тренажера 100. Дополнительное захватное приспособление 2100 имеет несколько шнуров 2110, которые могут захватываться в различных комбинациях, как объяснено далее, и часть 2120 для крепления захвата. В общем случае число шнуров 2110 может быть от одного до пяти или более, причем в одном варианте выполнения их число равно четырем, и каждый шнур имеет одинаковый диаметр и длину. В одном варианте выполнения захватываемая длина шнуров является достаточной для человеческой ладони, например, от 10,16 см до 15,24 см (от 4 до 6 дюймов), и шнуры имеют достаточную дополнительную длину, чтобы обеспечить возможность пользователю пропускать руку между шнурами, как показано на Фиг.21А-21С. В одном варианте выполнения дополнительное захватное приспособление 2100 имеет четыре шнура, обозначенных как первый шнур 2110а, второй шнур 2110b, третий шнур 2110с и четвертый шнур 2110d. Шнуры могут быть захвачены почти в любой комбинации, так что пользователь может захватить любое число шнуров, от одного шнура до всех четырех. На Фиг.21А изображена рука Н, захватывающая три шнура, например первый шнур 2110а, второй шнур 2110b и третий шнур 2110с, на Фиг.21В изображена рука, захватывающая два шнура, например первый и второй шнуры, и на Фиг.21С изображена рука, захватывающая один шнур, например первый шнур.A third example of an additional gripper is an
Часть 2120 для крепления захвата может прикрепляться с возможностью снятия, как рассматривается далее, к одному из пары захватов 123. Когда дополнительное захватное приспособление 2100 закреплено подобным образом, могут быть захвачены от одного до всех шнуров 2210 и может быть приложена сила посредством натяжения тренажера 100. В одном варианте выполнения каждый из пары захватов 123 снабжен одним дополнительным захватным приспособлением 2100.The
Один вариант выполнения дополнительного захватного приспособления 2100 проиллюстрирован на Фиг.22А-D, где Фиг.22А представляет собой вид в аксонометрии дополнительного захватного приспособления, Фиг.22В представляет собой вид сверху дополнительного захватного приспособления, Фиг.22С представляет собой вид снизу дополнительного захватного приспособления, и Фиг.22D представляет собой вид сбоку дополнительного захватного приспособления в разрезе по линии 22D-22D, изображенной на Фиг.22С. Дополнительное захватное приспособление 2100 образовано из четырех лент, а именно ленты 2205 основы, передней ленты 2207 и двух лент 1803 крепления, и двух шнуров 2201 и 2203. Шнуры 2110 образованы из двух более длинных шнуров 2201 и 2203, и часть 2120 для крепления захвата образована из лент 2205, 2207 и 1803.One embodiment of the
Две ленты 1803, образующие часть 2120 для крепления захвата, прикреплены их соответствующими центральными частями между концами ленты 2205 основы и передней ленты 2207. Четыре шнура 2110a-d образованы из более длинных шнуров 2201 и 2203. В частности, как показано на Фиг.22В, шнуры 2101 и 2103 расположены бок о бок и согнуты пополам. Каждый шнур образует петлю 2213 вблизи середины шнуров 2101 и 2103, связанных вместе обвязкой 2109 для образования петли, и с четырьмя концами шнуров 2101 и 2103, соединенных обвязкой 2109. В разрезе на Фиг.22D шнур 2203 показан с первым концом 2213 и вторым концом 2217, соединенными вместе обвязкой 2209, и центральной частью 2215, образующей петлю 2213 вокруг ленты 2207. Каждый шнур 2101 и 2103 сложен вдвое, и, таким образом, каждый шнур образует два шнура между обвязками 2109 и 2111. В частности, шнур 2101 образует шнуры 2210а и 2210b, а шнур 2103 образует шнуры 2210с и 2210d.The two
В одном варианте выполнения ленты 2105 и 2107 предпочтительно являются ткаными полосами из полимерного волокна. Лента 2105 основы предпочтительно имеет длину 12,7 см (5 дюймов) и ширину 2,54 см (1 дюйм), а передняя лента 2107 предпочтительно имеет в длину 15,24 мм (6 дюймов) и ширину 2,54 (1 дюйм). Шнуры 2101 и 2103 предпочтительно являются шнурами из хлопчатобумажной ткани длиной приблизительно от 50,8 см до 76,2 см (от 20 до 30 дюймов), более предпочтительно от 55,88 см до 66,04 см (от 22 до 26 дюймов). В еще одном варианте выполнения длина составляет приблизительно 60,96 см (24 дюйма). В одном варианте выполнения шнуры 2201 и 2203 имеют диаметр, который имеет значение предпочтительно от 1,27 см до 2,54 см (от ½ до 1 дюйма), или, в другом варианте выполнения, приблизительно 1,905 см (3/4 дюйма). Соединения между лентами 2105 и 2107 и лентами 1803 крепления предпочтительно дважды прошиты. В результате получается захватное приспособление 2100, имеющее четыре шнура с длиной захвата приблизительно 25,4 см (10 дюймов), обеспечивающее достаточно места для прохода руки пользователя между шнурами 2110 и их захвата.In one embodiment, the tapes 2105 and 2107 are preferably woven stripes of polymer fiber. The base ribbon 2105 preferably has a length of 12.7 cm (5 inches) and a width of 2.54 cm (1 inch), and the front ribbon 2107 preferably has a length of 15.24 mm (6 inches) and a width of 2.54 (1 inch) . Cords 2101 and 2103 are preferably cotton cords of approximately 50.8 cm to 76.2 cm (20 to 30 inches) in length, more preferably 55.88 cm to 66.04 cm (22 to 26 inches) in length. In yet another embodiment, the length is approximately 60.96 cm (24 inches). In one embodiment,
Дополнительное захватное приспособление 2100 может прикрепляться с возможностью снятия и используется следующим образом. Часть 2120 для крепления захвата может прикрепляться с возможностью снятия к одному из пары захватов 123 посредством контакта поверхностей 1809 и 1813 крепления на каждой ленте 1803. Когда дополнительное захватное приспособление 2100 для пальцев закреплено подобным образом, один, два, три или все четыре шнура 2110a-d могут быть захвачены рукой. Например, Фиг.21А иллюстрирует шнуры 2110а, 2110b и 2110с, захваченные пользователем, Фиг.21В показывает шнуры 2110а и 2110b, захваченные пользователем, а Фиг.21С показывает шнур 2110а, захваченный пользователем. Когда шнуры 2110 захвачены таким образом, пользователь может приложить силу к тренажеру 100.
Фиг.27 представляет собой вид в аксонометрии захвата, который может быть использован либо как захват для кисти руки, либо как захват для ступни, и который здесь называется без ограничения как "комбинированный" захват 2700. Захват 2700 может быть в целом подобен захватам или дополнительным захватам тренажера 100, кроме тех признаков, которые явным образом описаны ниже. Где только возможно, аналогичные элементы обозначаются одинаковыми номерами позиций на чертежах.Fig. 27 is a perspective view of a grip that can be used either as a grip for the wrist or as a grip for the foot, and which is here referred to without limitation as a "combined"
В целом, комбинированный захват 2700 содержит два элемента, которые могут использоваться как захваты, которые могут быть расположены на одном конце или на обоих концах тренажеров, описанных здесь, включая, но не ограничиваясь, тренажер 100 или 400. Таким образом, например, комбинированный захват 2700 может быть расположен в обоих концах 121, на обоих концах 421, или на одном из концов 421а или 421b. В варианте выполнения, изображенном на Фиг.27, захват 2700 содержит захват 423а для кисти руки, поддерживаемый петлей 425а ленты 427а. Более конкретно, материал ленты 427а проходит через петлю 425а и прикреплен к ленте швом 2711. Захват 2700, кроме того, содержит петлю 2710, поддерживаемую на конце 421а.In general, the combination gripper 2700 contains two elements that can be used as grips, which can be located at one end or both ends of the simulators described herein, including, but not limited to, the
В одном варианте выполнения петля 2710 является лентой, образованной из по меньшей мере одной неупругой части, которые скреплены вместе, чтобы образовать непрерывную петлю через часть 803, и петля, таким образом, присоединена с образованием единого целого к захвату 423 для кисти руки. Таким образом, например, захват 423а для кисти руки имеет первый конец 423а-1 и 423а-2, которые соответствуют первому концу 803-1 и второму концу 803-2, соответственно, внутренней цилиндрической трубчатой части 803. В одном варианте выполнения петля 2710 образована из по меньшей мере одной части тканой полосы с концами, сшитыми вместе, чтобы образовать петлю, проходящую через часть 803, в результате чего часть петли свисает ниже ручного захвата.In one embodiment,
Фиг.28 представляет собой вид в аксонометрии второго варианта выполнения комбинированного захвата 2800, который в целом может быть аналогичен захвату 2700, кроме тех признаков, которые явным образом подробно описаны ниже. Где только возможно, аналогичные элементы обозначены одинаковыми номерами позиций на чертежах.FIG. 28 is a perspective view of a second embodiment of a combined
Комбинированный захват 2800 содержит гибкую петлю 2810, которая содержит ленту 2811, имеющую конец 2812, и механизм 2813 регулировки длины. Лента 2811 проходит через трубчатую часть 803, и механизм 2813 регулировки длины позволяет регулировать размер петли 2810 путем перемещения конца 2812 через механизм. Механизм 2813, который может быть, например, кулачковой пряжкой, как показано, или креплением крюками и петлями, известным под товарным знаком VELCRO®, обеспечивает возможность пользователю регулировать длину петли 2810 согласно размерам тела пользователя. Лента 2811 может быть либо выполнена с возможностью снятия с ручного захвата 423а или может иметь концы, которые являются слишком большими, чтобы обеспечить возможность удаления захвата и, таким образом, не является несъемным с захвата для кисти руки. В альтернативном варианте выполнения (не показан), лента 2811 и конец 2812 имеют сопряженные друг другу крепления, такие как крепления крюками и петлями, известные под товарным знаком VELCRO®, чтобы предотвратить свисание конца ленты.
В одном варианте выполнения захват 423 имеет длину 12,7 см (5 дюймов), а петля 2710 имеет длину приблизительно 50,8 см (20 дюймов). В другом варианте выполнения часть петли 2710, которая не находится внутри части 803, имеет подкладку в виде мягкого материала толщиной 3,175 мм (1/8 дюйма), включая, но не ограничиваясь этим, каучук на основе полихлоропрена, такой как неопрен. В другом варианте выполнения петля 2810 выполнена с возможностью регулировки длины от приблизительно 30,48 см до приблизительно 58,42 см (от 12 до 23 дюймов).In one embodiment, the
В еще одном варианте выполнения петля 2711 или 2811 не образует петлю, проходящую через часть 803, а прикреплена на концах 803-1, 803-2 или вблизи них.In yet another embodiment,
Фиг.29, 30А и 30В являются тремя видами в аксонометрии третьего варианта выполнения комбинированного захвата 2900 с подвижным жестким захватом 423, причем Фиг.29 представляет собой вид захвата в аксонометрии, а Фиг.30А и 30В представляют собой вид в аксонометрии комбинированного захвата, изображенного на Фиг.29, имеющего жесткий захват, соответственно, в верхнем и в нижнем положениях. Комбинированный захват 2900 может быть в целом выполнен аналогично захватам 2700 или 2800, кроме тех признаков, которые явным образом подробно описаны ниже. Где только возможно, аналогичные элементы обозначены одинаковыми номерами позиций в описании вариантов выполнения, изображенных на чертежах Фиг.4, 7, 17, 18, 27, 28, 29, 30А и 30В.FIGS. 29, 30A and 30B are three perspective views of a third embodiment of a combined
Комбинированный захват 2900 содержит часть 2901, которая прикреплена к ленте 427, или является удлиняющей частью этой ленты. Комбинированный захват 2900 содержит верхнюю петлю 2902, захват 423 и нижнюю петлю 2904. Часть 2901 проходит через цилиндрическую трубчатую часть 803 и образует верхнюю петлю 2902 и нижнюю петлю 2904. Часть 2901 может представлять собой, например и без ограничения, тканую полосу некоторой длины или соединенные между собой части тканой полосы, как описано в отношении удлиненного элемента 420. Как описано далее, захват 423 может перемещаться вдоль части 2901 и, таким образом, регулировать размер петель 2902 и 2904. Термин "размер петли" обозначает длину материала в гибкой части петли.The
Часть части 2901, которая образует нижнюю петлю 2904, имеет подкладку 2911. Подкладка 2911 присоединена к петле 2910 посредством сшивки, клея или любым другим подходящим способом присоединения.The portion of the
Конструкция и функция комбинированного захвата 2900 показана более подробно на Фиг.30А и 30В, причем захват 423 для кисти руки показан штриховой линией. Как показано на этих чертежах, часть 2901 проходит через цилиндрическую трубчатую часть 803 захвата 423 с образованием петель 2902 и 2904. Конкретно, часть 2901 копирует "цифру 8", имея перекрестную часть внутри цилиндрической трубчатой части 803 захвата 423. Захват 423 может перемещаться с образованием большой нижней петли 2904 (как на Фиг.30А) или маленькой нижней петли (как на Фиг.30В). Размер петли 2910 может, таким образом, быть отрегулирован путем перемещения захвата 423 для кисти руки. В одном варианте выполнения между материалом части 2901 и внутренней поверхности трубчатой части 803 имеется достаточное трение, чтобы предотвратить изменение размера петли 2904, когда петлю 2902 тянут в сторону от захвата 423. Таким образом, например, когда петлю 2904 тянут от захвата 423, т.е. когда, например, используют захват для ступни, как показано на Фиг.17А, трение между материалом части 2901 и части 803 предотвращает перемещение захвата 423 и размер петли 2904 не изменяется. В другом варианте выполнения подкладка 2911 не может легко проходить через часть 803, и она ограничивает наименьший размер петли 2904.The design and function of the combined
СПОСОБЫ ВЫПОЛНЕНИЯ УПРАЖНЕНИЙWAYS TO EXERCISE EXERCISES
Использование тренажера 120 проиллюстрировано на Фиг.12А-12D, где Фиг.12А представляет собой начальную конфигурацию, Фиг.12В иллюстрирует удлинение удлиненного элемента 420, также проиллюстрированного на Фиг.12В′ и 12В′′, Фиг.12С иллюстрирует приложение силы к более короткому плечу удлиненного элемента, и Фиг.12D иллюстрирует приложение силы к захватам во время выполнения упражнений. Фиг.12А-12D являются иллюстративными и в целом относятся к тренажерам, выполненным в соответствии с настоящим изобретением.The use of the
С целью иллюстрации Фиг.12А считается начальной конфигурацией анкерного устройства, и предполагается, что пользователь желает увеличить длину S, сохраняя ту же самую длину у пары плеч 422 (приблизительно равную половине S). Во-первых, пользователь приводит в действие одну или обе пряжки 435. Фиг.12В схематично показывает результат приведения в действие пряжки 435а и удлинение плеча 422а, как обозначено стрелками на этом чертеже. Фиг.12В′ показывает пользователя U, толкающего кулачок 711 и захватывающего конец 431, а Фиг.12В′′ показывает пользователя, тянущего конец 431 от кулачка, как обозначено стрелкой, чтобы уменьшить длину устройства.For the purpose of illustration, FIG. 12A is considered the initial configuration of the anchor device, and it is assumed that the user wishes to increase the length S while maintaining the same length for the pair of arms 422 (approximately equal to half S). First, the user drives one or both buckles 435. FIG. 12B schematically shows the result of actuating the
Пользователь затем предпочтительно тянет за более короткое плечо 422b, как обозначено вектором F1 силы на Фиг.12С. Когда оба плеча из пары плеч 422 имеют приблизительно одну и ту же, большую длину, пользователь тогда может выполнять упражнение, как обозначено на Фиг.12D, прикладывая равные силы F2 к каждому захвату для кисти руки. На практике вовсе не нужно, чтобы две силы, показанные на Фиг.12D, были равными, поскольку приложение силы к плечам 422 от анкера 410 увеличивает трение между удлиненным элементом 420 и анкером, не позволяя изменять длину, даже при некотором несоответствии приложенных сил. В качестве альтернативы, тренажер может быть выполнен с возможностью регулировки для обеспечения более коротких плеч 422 путем натяжения конца 431 для сокращения длины S.The user then preferably pulls on the
В дополнение к тому, чтобы быть одинаково сбалансированным между этими двумя плечами, можно использовать устройство, выполненное в соответствии с изобретением, чтобы обеспечить отличающиеся длины плеч для выполнения упражнений. Фиг.13А-13С иллюстрируют использование тренажера, имеющего отличающиеся длины плеч 422, где Фиг.13А представляет собой начальную конфигурацию, Фиг.13В показывает приложение силы к одной из пары плеч 422, а Фиг.13С показывает приложение силы к захвату во время выполнения упражнения. Для иллюстративных целей Фиг.13А, как предполагается, показывает начальную конфигурацию анкера, и также предполагается, что пользователь желает отрегулировать длину плеч 422 на различные длины. Во-первых, пользователь предпочтительно тянет за более короткое плечо 422b, как обозначено вектором F1 силы на Фиг.13В. Пользователь может затем выполнять упражнение, как обозначено равными силами F2 на Фиг.13С. На практике нет необходимости, чтобы две силы, показанные на Фиг.13С, были равными, поскольку, как показано на Фиг.12, приложение силы к плечам 422 от анкера 410 увеличивает трение между удлиненным элементом 420 и анкером. Это ограничивает возможность изменения длины плеч даже при некотором несоответствии приложенных сил. Регулировка плеч 422 на различные длины может быть объединена с удлинением или сокращением длины S, приводя в действие одну или обе пряжки 435.In addition to being equally balanced between the two shoulders, a device made in accordance with the invention can be used to provide different shoulder lengths for the exercises. 13A-13C illustrate the use of a simulator having
Тренажер, выполненный в соответствии с изобретением, обеспечивает возможность выполнения широкого диапазона упражнений. Примеры многих упражнений, которые возможны с этим тренажером, приведены в Таблице 1 для выполненного в соответствии с изобретением устройства, размещенного поверх двери. На Фиг.3 и 15 проиллюстрированы три из большого числа положений выполнения упражнений. В каждом из этих положений пользователь выбирает длину для тренажера 100 или 400, отрегулированную, как объяснено в отношении Фиг.12 или 13, размещается на полу на требуемом горизонтальном расстоянии Х от точки А крепления, причем часть веса пользователя поддерживается тренажером. Когда вес пользователя поддерживается, как показано на Фиг.3 и 15, он перемещает свое тело в направлениях, соответствующих типу выполняемого упражнения, например, перемещая тело к стенке или от стенки или пола, сгибая руки или ноги, одновременно поддерживая свой вес тренажером, или выполняя другие движения для тренировки своих мышц.A simulator made in accordance with the invention provides the ability to perform a wide range of exercises. Examples of many exercises that are possible with this simulator are shown in Table 1 for a device in accordance with the invention placed on top of a door. Figures 3 and 15 illustrate three of a large number of exercise positions. In each of these positions, the user selects a length for the

Конкретно, на Фиг.3 и 15 показаны отдельные позы пользователя U, выполняющего различные упражнения, включающие упражнение тяги в стойке верхнего ряда (Фиг.3), подтягивание ног в захватах сзади с упором на руках (Фиг.15А), присев на одной ноге, держась руками за захваты тренажера (Фиг.15В), сгибание и разгибание рук в приседе, имитируя опускание в воду с руками, находящимися в захватах тренажера (Фиг.15С), стоя на коленях, сгибание рук, тянущих захваты тренажера (Фиг.15D), лежа на спине, сгибание ног, находящихся в захватах тренажера (Фиг.15Е), подъем тазобедренных суставов, лежа на спине и натягивая захваты тренажера руками (Фиг.15F), передний подъем плечевых суставов, удерживая захваты тренажера (Фиг.15G), группировка тела при натяжении руками захватов тренажера (Фиг.15Н), и выпрямление трицепса (Фиг.15I). Из Фиг.3 и 15 очевидно, что возможно много различных типов упражнений с предложенным тренажером в зависимости от длины устройства, расположения тела и от способа захвата. Кроме того, устройство, выполненное в соответствии с изобретением, может использоваться для выполнения упражнений одной рукой, как проиллюстрировано на Фиг.16А и 16В. Конкретно, Фиг.16А показывает тренажер 400', имеющий взаимно сцепляющиеся концы 421а и 421b для выполнения упражнений одной рукой, а Фиг.16В иллюстрирует использование тренажера 400' при выполнении упражнения тяги в стойке верхнего ряда одной рукой.Specifically, FIGS. 3 and 15 show the individual poses of a user U performing various exercises, including a pulling exercise in an upright posture (FIG. 3), pulling up legs in the rear grips with an emphasis on hands (FIG. 15A), crouching on one leg , holding hands on the grips of the simulator (Fig.15B), flexion and extension of the arms in a squat, simulating lowering into water with the hands in the grips of the simulator (Fig.15C), kneeling, bending the arms, pulling the grabs of the simulator (Fig.15D ), lying on his back, bending the legs located in the grips of the simulator (Fig.15E), lifting the hip joints, lying on your back and pulling the arms of the simulator with your hands (Fig. 15F), the front lift of the shoulder joints, holding the grips of the simulator (Fig. 15G), grouping the body when pulling the arms of the simulator (Fig. 15H), and straightening the triceps (Fig. 15I). From Figs. 3 and 15, it is obvious that many different types of exercises are possible with the proposed simulator, depending on the length of the device, the location of the body, and the manner of capture. In addition, a device made in accordance with the invention can be used to perform exercises with one hand, as illustrated in Figa and 16B. Specifically, FIG. 16A shows a
Хотя представленное здесь изобретение(я) было раскрыто в контексте конкретных предпочтительных вариантов выполнения и примеров, специалистам должно быть понятно, что изобретение(я) выходит за рамки конкретно описанных вариантов выполнения и распространяется на другие альтернативные варианты выполнения и/или использование изобретения(й) и его очевидные модификации и эквиваленты. Кроме того, изобретение(я) может включать все различные воплощенные здесь комбинации. Таким образом, предусматривается, что объем раскрытого здесь изобретения(й) не должен быть ограничен конкретными описанными выше вариантами выполнения, а должен определяться только приведенной ниже формулой изобретения.Although the invention (s) presented here has been disclosed in the context of specific preferred embodiments and examples, those skilled in the art will appreciate that the invention (s) is outside the scope of the specifically described embodiments and extends to other alternative embodiments and / or use of the invention (s) and its obvious modifications and equivalents. In addition, the invention (s) may include all of the various combinations embodied herein. Thus, it is contemplated that the scope of the invention (s) disclosed herein should not be limited to the specific embodiments described above, but should be determined only by the claims that follow.
Везде в этом описании термин "содержащий" должен быть синонимичным терминам "включающий", "заключающий" или "отличающийся тем", является инклюзивным или открытым и не исключает дополнительные, неописанные элементы или этапы способа. "Содержащий" представляет собой термин уровня техники, который означает, что названные элементы являются существенными, но могут быть добавлены и другие элементы, которые все равно образуют конструкцию, находящуюся в объеме формулы изобретения.Throughout this description, the term “comprising” should be synonymous with the terms “comprising,” “enclosing,” or “characterized in,” is inclusive or open, and does not exclude additional, undescribed elements or steps of the method. "Containing" is a term of the prior art, which means that the named elements are essential, but other elements can be added, which nevertheless form a design that is within the scope of the claims.
Claims (20)
захват для кисти руки, прикрепленный с возможностью скольжения к указанному удлиненному элементу рядом с указанной перекрестной частью,
при этом указанная вторая петля выполнена с возможностью регулирования ее размера в соответствии с положением указанного захвата для кисти руки на указанном удлиненном элементе, а указанный неподвижно закрепленный элемент выполнен с возможностью ограничения скольжения указанного захвата по второй петле.1. Capture for use by the user of the simulator, comprising: an elongated element, made in the form of the number 8 and bounding the cross part, the first loop attached to the simulator and passing to the cross part, the second loop passing from the specified cross part, an element fixedly fixed in the specified position on the second loop, and
a hand grip slidably attached to said elongated element adjacent to said cross part,
while the specified second loop is made with the possibility of adjusting its size in accordance with the position of the specified capture for the hand on the specified elongated element, and the specified fixed element is made with the possibility of limiting the sliding of the specified capture on the second loop.
удлиненный элемент, прикрепленный к тренажеру и выполненный из гибкого материала, и
захват для кисти руки, прикрепленный с возможностью скольжения к указанному удлиненному элементу,
при этом часть указанного удлиненного элемента представляет собой петлю, имеющую концы, каждый из которых находится в контакте с указанным захватом для кисти руки, и представляющую собой первую петлю,
указанный удлиненный элемент представляет собой вторую петлю, прикрепленную к тренажеру,
указанный удлиненный элемент указанной петли между указанными концами петли выполнен с возможностью регулирования его длины в соответствии с положением указанного захвата для кисти руки, а на указанной первой петле неподвижно закреплен в заданном положении элемент, выполненный с возможностью ограничения скольжения указанного захвата по указанной петле.11. Capture for use by the user of the simulator, containing:
an elongated element attached to the simulator and made of flexible material, and
a hand grip slidably attached to said elongated element,
while part of the specified elongated element is a loop having ends, each of which is in contact with the specified grip for the hand, and representing the first loop,
the specified elongated element is a second loop attached to the simulator,
the specified elongated element of the specified loop between the indicated ends of the loop is made with the possibility of adjusting its length in accordance with the position of the specified grip for the hand, and on the specified first loop the element is fixedly fixed in the specified position, made with the possibility of limiting the sliding of the specified grip on the specified loop.
Applications Claiming Priority (4)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US97311807P | 2007-09-17 | 2007-09-17 | |
| US60/973,118 | 2007-09-17 | ||
| US12/209,151 US20090105053A1 (en) | 2003-04-09 | 2008-09-11 | Combination grip for an exercise device |
| US12/209,151 | 2008-09-11 |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| RU2010112481A RU2010112481A (en) | 2011-10-27 |
| RU2455044C2 true RU2455044C2 (en) | 2012-07-10 |
Family
ID=40468288
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| RU2010112481/12A RU2455044C2 (en) | 2007-09-17 | 2008-09-16 | Combined grip for fitness machine |
Country Status (16)
| Country | Link |
|---|---|
| US (1) | US20090105053A1 (en) |
| EP (1) | EP2195098A4 (en) |
| JP (1) | JP2010538765A (en) |
| KR (1) | KR20100100758A (en) |
| CN (1) | CN101801469A (en) |
| AU (1) | AU2008302427A1 (en) |
| BR (1) | BRPI0816010A2 (en) |
| CA (1) | CA2699777A1 (en) |
| CO (1) | CO6270247A2 (en) |
| IL (1) | IL204532A0 (en) |
| MX (1) | MX2010002795A (en) |
| MY (1) | MY166330A (en) |
| NZ (1) | NZ584628A (en) |
| RU (1) | RU2455044C2 (en) |
| WO (1) | WO2009039106A1 (en) |
| ZA (1) | ZA201002657B (en) |
Families Citing this family (19)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US7044896B2 (en) * | 2003-04-09 | 2006-05-16 | Fitness Anywhere, Inc. | Exercise device including adjustable, inelastic straps |
| US8075462B1 (en) | 2010-01-28 | 2011-12-13 | Robert S. Hinds | Elastic member exercise device |
| US8197392B2 (en) | 2010-08-03 | 2012-06-12 | Astone Fitness Ltd. | Suspendible exercise straps |
| US9597541B2 (en) * | 2010-08-24 | 2017-03-21 | Pivotal 5, Llc | Suspension training exercise device |
| WO2013003280A1 (en) * | 2011-06-27 | 2013-01-03 | Adam White | Exercise apparatus and method of exercise |
| US9333385B2 (en) * | 2012-07-17 | 2016-05-10 | Pivotal 5, Llc | Exercise device with elastic members and webbing |
| US20140080687A1 (en) * | 2012-09-14 | 2014-03-20 | John Stuef | Resistance-based exercise device |
| US8979716B1 (en) | 2014-06-20 | 2015-03-17 | Kenneth C. Rawlins | Portable exercise equipment |
| US9757604B2 (en) | 2015-08-18 | 2017-09-12 | Matthew Roderick Carter | Multipurpose exercise training device |
| US20190201732A1 (en) * | 2018-01-02 | 2019-07-04 | Chung-Fu Chang | Belt pulling exercise apparatus |
| KR101890689B1 (en) | 2018-03-22 | 2018-08-22 | 김정원 | Multi grip assembly for health device |
| US10953302B2 (en) | 2018-06-29 | 2021-03-23 | Palladium Safety Solutions, Inc. | Guard to limit abrasions during use of gymnastics rings and method of using same |
| CN109224389B (en) * | 2018-09-21 | 2024-03-08 | 常州市肿瘤医院(常州市第四人民医院) | Postoperative rehabilitation device for breast cancer |
| TWI684475B (en) * | 2018-11-06 | 2020-02-11 | 王羽暄 | Wall-mounted stretching exercise equipment |
| US11083926B2 (en) * | 2018-11-30 | 2021-08-10 | Robert Yanez | Exercise device |
| USD973158S1 (en) * | 2020-04-09 | 2022-12-20 | Reestar International Limited | Combination grip for an exercise device |
| RU2759468C1 (en) * | 2020-11-16 | 2021-11-15 | Родион Альфредович Гумеров | Suspended exercise apparatus for exercising with own body weight |
| CN112569539A (en) * | 2020-12-07 | 2021-03-30 | 湖南省嘉联医疗器械有限公司 | Physical training device for medical rehabilitation |
| USD998069S1 (en) | 2021-01-05 | 2023-09-05 | Joshua Hunter | Resistance band sleeve |
Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2184588C2 (en) * | 2000-08-01 | 2002-07-10 | Соловьев Владимир Владимирович | Exerciser |
| RU25419U1 (en) * | 2002-04-04 | 2002-10-10 | Дальневосточная государственная морская академия им. адмирала Г.И.Невельского | SIMULATOR FOR UNIQUE ATHLETES |
| US6652419B1 (en) * | 2002-05-20 | 2003-11-25 | James Eugene Rota | Integrated exercise and conditioning system for the human body |
Family Cites Families (20)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US3117782A (en) * | 1962-01-15 | 1964-01-14 | Lyman C Johnston | Physical exercise apparatus including cables attachable at one end to the user's legs |
| US4059265A (en) * | 1976-01-22 | 1977-11-22 | Wieder Horst K | Elastic pull-type exerciser |
| US4027876A (en) * | 1976-04-07 | 1977-06-07 | Lyman Clarke Johnston | Exercising apparatus |
| US4047714A (en) * | 1976-04-15 | 1977-09-13 | Powell Truman W | Push pull type exercising device |
| US4251071A (en) * | 1978-08-17 | 1981-02-17 | Norton Craig D | Exercising device with compressible hand grip on an elastic card |
| US4257592A (en) * | 1978-11-29 | 1981-03-24 | Arthur Jones | Exercising apparatus with improvements in handle structure, rope arrangement, and clamping means |
| US4756527A (en) * | 1987-04-14 | 1988-07-12 | Ledbetter Daniel R | Gripping assembly for use with cable exercising equipment |
| US5254065A (en) * | 1991-12-16 | 1993-10-19 | Pollock Todd E | Flexible loop fastening strap supportable in door structure |
| US5433688A (en) * | 1992-04-24 | 1995-07-18 | Davies; Phillip H. | Exercise device worn on the user's body having resilient resistance mechanisms |
| US5514057A (en) * | 1992-06-05 | 1996-05-07 | Ciolino; Peter A. | Bathtub exercise platform and exercise method |
| JP3071354U (en) * | 2000-02-28 | 2000-08-29 | 藤井金属化工株式会社 | Hanging health appliances |
| JP2003325700A (en) * | 2002-05-15 | 2003-11-18 | Kiyoma Hamazaki | Forward and backward bending and stretching exercises assist tool for foot fingers |
| US7044896B2 (en) * | 2003-04-09 | 2006-05-16 | Fitness Anywhere, Inc. | Exercise device including adjustable, inelastic straps |
| US7806814B2 (en) * | 2003-04-09 | 2010-10-05 | Fitness Anywhere, Inc. | Combination grip for an exercise drive |
| US20070027005A1 (en) * | 2003-04-09 | 2007-02-01 | Randal Hetrick | Exercise device grips and accessories for exercise devices |
| US7762932B2 (en) * | 2007-09-17 | 2010-07-27 | Fitness Anywhere, Inc. | Inelastic exercise device having a limited range |
| US7785244B2 (en) * | 2007-09-17 | 2010-08-31 | Fitness Anywhere Inc. | Combination grip for an exercise device |
| US8083653B2 (en) * | 2007-09-17 | 2011-12-27 | Fitness Anywhere, Llc | Exercise device having a door anchor |
| US8043197B2 (en) * | 2007-09-17 | 2011-10-25 | Fitness Anywhere LLC | Exercise device having inelastic straps and interchangeable parts |
| US20090075790A1 (en) * | 2007-09-17 | 2009-03-19 | Randal Hetrick | Combination anchor for an exercise device |
-
2008
- 2008-09-11 US US12/209,151 patent/US20090105053A1/en not_active Abandoned
- 2008-09-16 NZ NZ584628A patent/NZ584628A/en unknown
- 2008-09-16 KR KR1020107008212A patent/KR20100100758A/en not_active Application Discontinuation
- 2008-09-16 AU AU2008302427A patent/AU2008302427A1/en not_active Abandoned
- 2008-09-16 EP EP08832297A patent/EP2195098A4/en not_active Withdrawn
- 2008-09-16 WO PCT/US2008/076544 patent/WO2009039106A1/en active Application Filing
- 2008-09-16 MY MYPI2010001153A patent/MY166330A/en unknown
- 2008-09-16 RU RU2010112481/12A patent/RU2455044C2/en not_active IP Right Cessation
- 2008-09-16 MX MX2010002795A patent/MX2010002795A/en active IP Right Grant
- 2008-09-16 CA CA2699777A patent/CA2699777A1/en not_active Abandoned
- 2008-09-16 CN CN200880107138A patent/CN101801469A/en active Pending
- 2008-09-16 BR BRPI0816010-4A patent/BRPI0816010A2/en not_active Application Discontinuation
- 2008-09-16 JP JP2010525081A patent/JP2010538765A/en active Pending
-
2010
- 2010-03-16 IL IL204532A patent/IL204532A0/en unknown
- 2010-04-15 ZA ZA2010/02657A patent/ZA201002657B/en unknown
- 2010-04-16 CO CO10044726A patent/CO6270247A2/en not_active Application Discontinuation
Patent Citations (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2184588C2 (en) * | 2000-08-01 | 2002-07-10 | Соловьев Владимир Владимирович | Exerciser |
| RU25419U1 (en) * | 2002-04-04 | 2002-10-10 | Дальневосточная государственная морская академия им. адмирала Г.И.Невельского | SIMULATOR FOR UNIQUE ATHLETES |
| US6652419B1 (en) * | 2002-05-20 | 2003-11-25 | James Eugene Rota | Integrated exercise and conditioning system for the human body |
Also Published As
| Publication number | Publication date |
|---|---|
| BRPI0816010A2 (en) | 2012-03-27 |
| EP2195098A4 (en) | 2011-12-21 |
| NZ584628A (en) | 2012-09-28 |
| JP2010538765A (en) | 2010-12-16 |
| MX2010002795A (en) | 2010-07-28 |
| MY166330A (en) | 2018-06-25 |
| RU2010112481A (en) | 2011-10-27 |
| EP2195098A1 (en) | 2010-06-16 |
| ZA201002657B (en) | 2011-04-28 |
| IL204532A0 (en) | 2010-11-30 |
| KR20100100758A (en) | 2010-09-15 |
| CO6270247A2 (en) | 2011-04-20 |
| AU2008302427A1 (en) | 2009-03-26 |
| CN101801469A (en) | 2010-08-11 |
| US20090105053A1 (en) | 2009-04-23 |
| WO2009039106A1 (en) | 2009-03-26 |
| CA2699777A1 (en) | 2009-03-26 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| RU2455044C2 (en) | Combined grip for fitness machine | |
| RU2476253C2 (en) | Trainer containing nonelastic bands and interchangeable parts | |
| RU2458720C2 (en) | Inelastic simulator with limited range of motion | |
| RU2483775C2 (en) | Combined anchor for training machine | |
| RU2407577C2 (en) | Combined holder of gym apparatus | |
| CA2634464C (en) | Exercise device with adjustable inelastic straps | |
| AU2006332594B2 (en) | Combination grip for an exercise device | |
| BRPI0815870A2 (en) | exercise device attached to a structure |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| PC41 | Official registration of the transfer of exclusive right |
Effective date: 20121221 |
|
| MM4A | The patent is invalid due to non-payment of fees |
Effective date: 20130917 |