RU2437220C2 - Calibration of channel for communication system with duplex communication and time division channelling - Google Patents
Calibration of channel for communication system with duplex communication and time division channelling Download PDFInfo
- Publication number
- RU2437220C2 RU2437220C2 RU2009134903/08A RU2009134903A RU2437220C2 RU 2437220 C2 RU2437220 C2 RU 2437220C2 RU 2009134903/08 A RU2009134903/08 A RU 2009134903/08A RU 2009134903 A RU2009134903 A RU 2009134903A RU 2437220 C2 RU2437220 C2 RU 2437220C2
- Authority
- RU
- Russia
- Prior art keywords
- correction factors
- downlink
- user
- channel
- uplink
- Prior art date
Links
Images




Abstract
Description
Притязание на приоритет по 35 U.S.C. § 119.Priority claim by 35 U.S.C. § 119.
Настоящая заявка на патент притязает на приоритет по предварительной заявке на патент США № 60/421462, озаглавленной “Channel Calibration for a Time Division Duplexed Communication System”, и предварительной заявке на патент США № 60/421309, озаглавленной “MIMO WLAN System”, обе поданы 25 октября 2002 года, и права на которые принадлежат правообладателю настоящей заявки на патент, и которые включены в настоящее описание во всей своей полноте в качестве ссылки.This patent application claims priority for provisional patent application US No. 60/421462, entitled “Channel Calibration for a Time Division Duplexed Communication System”, and provisional patent application US No. 60/421309, entitled “MIMO WLAN System”, both filed October 25, 2002, and the rights to which belong to the copyright holder of this patent application, and which are incorporated into this description in its entirety by reference.
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕFIELD OF THE INVENTION
Настоящее изобретение относится в общем случае к связи и более точно к способам калибровки откликов нисходящего и восходящего каналов в коммуникационной системе с дуплексной связью и временным разделением каналов (TDD).The present invention relates generally to communications, and more specifically to methods for calibrating downlink and uplink responses in a full duplex and time division multiplexing (TDD) communication system.
УРОВЕНЬ ТЕХНИКИBACKGROUND
В беспроводной коммуникационной системе передача данных между точкой доступа и пользовательским терминалом происходит по беспроводному каналу. В зависимости от конструкции системы одни и те же или различные полосы частот могут использоваться для нисходящей линии и восходящей линии. Нисходящая линия (или прямая линия) относится к передаче от точки доступа к пользовательскому терминалу, а восходящая линия (или обратная линия) относится к передаче от пользовательского терминала к точке доступа. Если доступны две полосы частот, тогда нисходящая линия и восходящая линия могут передаваться в отдельных полосах частот, используя дуплексную связь с частотным разделением каналов (FDD). Если доступна только одна полоса частот, тогда нисходящая линия и восходящая линия могут совместно использовать одну полосу частот с применением дуплексной связи с временным разделением каналов (TDD).In a wireless communication system, data transmission between the access point and the user terminal occurs wirelessly. Depending on the design of the system, the same or different frequency bands can be used for the downlink and the uplink. A downlink (or straight line) refers to transmission from an access point to a user terminal, and an uplink (or reverse line) refers to transmission from a user terminal to an access point. If two frequency bands are available, then the downlink and uplink can be transmitted in separate frequency bands using frequency division duplex (FDD). If only one frequency band is available, then the downlink and the uplink can share the same frequency band using time division duplex (TDD).
Для достижения высокой производительности часто бывает необходимым знать частотный отклик беспроводного канала. Например, отклик нисходящего канала может быть необходим точке доступа для выполнения пространственной обработки (описано ниже) для передачи данных по нисходящей линии пользовательскому терминалу. Отклик нисходящего канала может быть оценен пользовательским терминалом, основываясь на пилот-сигнале, передаваемом точкой доступа. Пользовательский терминал может затем отправить оценку канала обратно в точку доступа для дальнейшего использования. Для такой схемы оценки канала необходимо передавать пилот-сигнал по нисходящей линии и отправка оценки канала в точку доступа вызывает дополнительные задержки и требует дополнительных ресурсов.To achieve high performance, it is often necessary to know the frequency response of a wireless channel. For example, a downlink response may be needed by an access point to perform spatial processing (described below) for downlink data to a user terminal. The downlink response can be estimated by the user terminal based on the pilot transmitted by the access point. The user terminal may then send the channel estimate back to the access point for future use. For such a channel estimation scheme, it is necessary to transmit a pilot signal in a downlink and sending the channel estimate to the access point causes additional delays and requires additional resources.
Для TDD систем с общей полосой частот можно предположить, что отклики нисходящего канала и восходящего канала являются взаимно-обратными. То есть, если ![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Однако частотные отклики передающей и приемной цепей в точке доступа обычно отличаются от частотных откликов передающей и приемной цепей в пользовательском терминале. В частности, частотные отклики передающей/приемной цепей, используемые для передачи по восходящей линии, могут отличаться от частотных откликов передающих/приемных цепей, используемых для передачи по нисходящей линии. “Эффективный” отклик нисходящего канала (т.е. включающего в себя передающие/приемные цепи) может быть отличным от отклика, взаимно-обратного эффективного нисходящего канала вследствие различий в передающих/приемных цепях (т.е. отклики эффективных каналов не являются взаимно-обратными). Если взаимно-обратная оценка отклика канала, полученная для одной линии, используется для пространственной обработки в другой линии, тогда различие в частотных откликах передающих/приемных цепей представляет ошибку, которая в случае, если ее не определить и не учесть, может вызвать деградацию производительности. However, the frequency responses of the transmitting and receiving circuits at the access point usually differ from the frequency responses of the transmitting and receiving circuits at the user terminal. In particular, the frequency responses of the transmit / receive chains used for uplink transmission may be different from the frequency responses of the transmit / receive chains used for downlink transmission. The “effective” response of the downstream channel (that is, including the transmit / receive chains) may be different from the response of the reciprocal effective downstream channel due to differences in the transmit / receive chains (ie, the responses of the effective channels are not mutually reverse). If the reciprocal inverse channel response estimate obtained for one line is used for spatial processing in another line, then the difference in the frequency responses of the transmit / receive circuits is an error that, if not determined and taken into account, can cause degradation in performance.
Таким образом, в данной области техники существует потребность в способах калибровки нисходящего и восходящего каналов в TDD коммуникационной системе.Thus, in the art there is a need for methods for calibrating downlink and uplink in a TDD communication system.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯSUMMARY OF THE INVENTION
В настоящем описании изложены способы для калибровки нисходящего и восходящего каналов для учета различий в частотных откликах передающей и приемной цепей в точке доступа и пользовательском терминале. После калибровки оценка отклика канала, полученная для одной линии, может быть использована для получения оценки отклика канала для другой линии. Это упрощает оценку канала и пространственную обработку.Methods for calibrating the downstream and upstream channels to account for differences in the frequency responses of the transmitter and receiver chains at the access point and user terminal are described herein. After calibration, the channel response estimate obtained for one line can be used to obtain the channel response estimate for the other line. This simplifies channel estimation and spatial processing.
В одном из вариантов осуществления предложен способ калибровки нисходящего и восходящего каналов в беспроводной TDD коммуникационной системе с множеством входов и множеством выходов (MIMO). Согласно способу пилот-сигнал передают по восходящему каналу и используют для вывода оценки отклика восходящего канала. Пилот-сигнал также передают по нисходящему каналу и используют для вывода оценки отклика нисходящего канала. Затем определяют два набора поправочных факторов, основываясь на оценках откликов нисходящего и восходящего каналов. Калиброванный нисходящий канал формируют путем использования первого набора поправочных факторов для нисходящего канала, и калиброванный восходящий канал формируют путем использования второго набора поправочных факторов для восходящего канала. Соответствующие поправочные факторы используют в соответствующих передатчиках для нисходящего и восходящего каналов. Отклики калиброванных нисходящего и восходящего каналов являются приблизительно взаимно-обратными благодаря двум наборам поправочных факторов. Первый и второй наборы поправочных факторов могут быть определены с использованием вычисления отношения матриц или вычисления с минимальной среднеквадратичной ошибкой (MMSE), как описано ниже.In one embodiment, a method for calibrating downlink and uplink channels in a multi-input multi-output wireless TDD communication system (MIMO) is provided. According to the method, a pilot signal is transmitted on the uplink and is used to derive an estimate of the response of the uplink. The pilot is also transmitted in the downlink and is used to derive an estimate of the response of the downlink. Then, two sets of correction factors are determined based on the estimates of the responses of the downstream and upstream channels. A calibrated downlink is formed by using the first set of correction factors for the downlink, and a calibrated uplink is formed by using the second set of correction factors for the uplink. Corresponding correction factors are used in the respective transmitters for the downstream and upstream channels. The responses of the calibrated downstream and upstream channels are approximately mutually inverse due to two sets of correction factors. The first and second sets of correction factors can be determined using matrix ratio calculation or minimum mean square error (MMSE) calculation, as described below.
Калибровка может выполняться в реальном масштабе времени, основываясь на передаче по радиоканалу. Каждый пользовательский терминал в системе может вывести второй набор поправочных факторов для использования в нем. Первый набор поправочных факторов для точки доступа может быть выведен множеством терминалов. Для системы с мультиплексированием с ортогональным делением частот (OFDM) калибровка может выполняться для первого набора поддиапазонов для получения двух наборов поправочных факторов для каждого поддиапазона в наборе. Поправочные факторы для других “некалиброванных” поддиапазонов могут быть интерполированы, основываясь на поправочных факторах, полученных для “калиброванных” поддиапазонов.Calibration can be performed in real time based on radio transmission. Each user terminal in the system can output a second set of correction factors for use in it. The first set of correction factors for the access point may be output by a plurality of terminals. For an orthogonal frequency division multiplexing (OFDM) system, calibration can be performed for a first set of subbands to obtain two sets of correction factors for each subband in the set. Correction factors for other “uncalibrated” subbands can be interpolated based on correction factors obtained for the “calibrated” subbands.
Различные аспекты вариантов осуществления настоящего изобретения более подробно описаны ниже.Various aspects of embodiments of the present invention are described in more detail below.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙBRIEF DESCRIPTION OF THE DRAWINGS
Отличительные особенности, сущность и преимущество настоящего изобретения станут более очевидными из приведенного ниже подробного описания, рассматриваемого совместно с чертежами, на которых одинаковые ссылочные позиции обозначают одинаковые элементы.Distinctive features, the essence and advantage of the present invention will become more apparent from the following detailed description, taken in conjunction with the drawings, in which the same reference position denotes the same elements.
На фиг.1 показаны передающие и приемные цепи в точке доступа и пользовательском терминале MIMO системы;Figure 1 shows the transmit and receive chains at the access point and user terminal of the MIMO system;
фиг.2 иллюстрирует применение поправочных факторов для учета различий в передающих/приемных цепях точки доступа и пользовательского терминала;Figure 2 illustrates the use of correction factors to account for differences in the transmit / receive chains of the access point and user terminal;
на фиг.3 показан процесс калибровки откликов нисходящего и восходящего каналов в TDD MIMO-OFDM системе;figure 3 shows the calibration process of the responses of the downward and upward channels in the TDD MIMO-OFDM system;
на фиг.4 показан процесс вывода оценок поправочных векторов из оценок откликов нисходящего и восходящего каналов;figure 4 shows the process of deriving estimates of correction vectors from estimates of responses of the downward and upward channels;
фиг.5 представляет собой блок-схему точки доступа и пользовательского терминала; и5 is a block diagram of an access point and user terminal; and
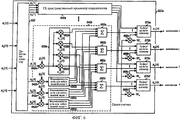
фиг. 6 представляет собой блок-схему TX пространственного процессора.FIG. 6 is a block diagram of a TX spatial processor.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯDETAILED DESCRIPTION OF THE INVENTION
Способы калибровки, изложенные в настоящем описании, могут быть использованы для различных коммуникационных систем. В частности, эти способы могут быть использованы в системах с одним входом и одним выходом (SISO), системах с множеством входов и одним выходом (MISO), системах с одним входом и множеством выходов (SIMO) и системах с множеством входов и множеством выходов (MIMO).The calibration methods described herein can be used for various communication systems. In particular, these methods can be used in systems with one input and one output (SISO), systems with multiple inputs and one output (MISO), systems with one input and many outputs (SIMO), and systems with many inputs and multiple outputs ( MIMO).
MIMO система использует множество (NT) передающих антенн и множество (NR) приемных антенн для передачи данных. MIMO канал, сформированный NT передающими и NR приемными антеннами, может быть разделен на NS независимых каналов, причем NS≤min{NT,NR}. Каждый из NS независимых каналов также называется пространственным каналом или собственной модой MIMO канала и соответствует размерности. MIMO система может обеспечить улучшенную производительность (т.е. увеличенную емкость передачи) в случае, если используются дополнительные размерности, созданные множеством передающих и приемных антенн. Обычно это требует точной оценки отклика канала между передатчиком и приемником.A MIMO system uses multiple (N T ) transmit antennas and multiple (N R ) receive antennas for data transmission. The MIMO channel formed by N T transmit and N R receive antennas can be divided into N S independent channels, with N S ≤min {N T , N R }. Each of the N S independent channels is also called a spatial channel or its own MIMO channel mode and corresponds to a dimension. A MIMO system can provide improved performance (i.e., increased transmission capacity) if additional dimensions created by multiple transmit and receive antennas are used. This usually requires an accurate estimate of the channel response between the transmitter and receiver.
На Фиг. 1 показана блок-схема передающей и приемной цепей в точке 102 доступа и пользовательском терминале 104 в MIMO системе. Для этой системы восходящая линия и нисходящая линия совместно используют один и тот же частотный диапазон способом дуплексной связи с временным разделением.In FIG. 1 shows a block diagram of a transmitter and receiver chain at an
Для нисходящей линии в точке 102 доступа символы (определяемые вектором ![]()
![]()
![]()
![]()
В случае восходящей линии в пользовательском терминале 104 символы (обозначаемые вектором ![]()
![]()
![]()
![]()
В случае нисходящей линии вектор приема в пользовательском терминале может быть выражен какIn the case of a downlink, the receive vector in the user terminal may be expressed as
![]()
![]()
где ![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Отклики передающих/приемных цепей и беспроводного канала, как правило, являются функцией частоты. Для простоты предполагается, что канал является каналом с амплитудным замиранием (т.е. с равномерным частотным откликом).The responses of the transmit / receive circuits and the wireless channel are typically a function of frequency. For simplicity, it is assumed that the channel is a channel with amplitude fading (i.e., with a uniform frequency response).
В случае восходящей линии вектор приема в точке доступа может быть выражен какIn the case of an uplink, the receive vector at the access point can be expressed as
![]()
![]()
где ![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Для TDD системы, поскольку нисходящая линия и восходящая линия совместно используют один и тот же диапазон частот, обычно существует сильная корреляция между откликами нисходящего и восходящего каналов. Таким образом, матрицы откликов нисходящего и восходящего каналов могут рассматриваться как взаимно-обратные (т.е. транспонированные) по отношению друг к другу, и обозначаемые как ![]()
![]()
![]()
![]()
![]()
![]()
Из уравнения (1) и (2) “эффективные” отклики нисходящего и восходящего каналов, ![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Комбинируя указанные два уравнения и уравнение (3), может быть получено следующее соотношение:Combining these two equations and equation (3), the following relation can be obtained:
![]()
![]()
Преобразуя уравнение (4), получаем следующее:Transforming equation (4), we obtain the following:
![]()
или
![]()
![]()
or
![]()
где ![]()
![]()
![]()
![]()
Уравнение (5) также может быть представлено в виде:Equation (5) can also be represented as:
![]()
![]()
Левая сторона уравнения (6) представляет отклик калиброванного канала восходящей линии, а правая сторона представляет транспонированный отклик калиброванного канала нисходящей линии. Использование диагональных матриц, ![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Матрицы ![]()
![]()
![]()
![]()
Для определения матриц ![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Фиг. 2 иллюстрирует использование поправочных матриц ![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
“Калиброванные” отклики нисходящего и восходящего каналов, видимые в пользовательском терминале и точке доступа, соответственно, при этом могут быть выражены какThe “calibrated” responses of the downstream and upstream channels, visible in the user terminal and access point, respectively, can be expressed as
![]()
![]()
![]()
![]()
где ![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Как показано выше, калибровка может выполняться в TDD системе для определения различий в откликах передающих/приемных цепей в точке доступа и пользовательском терминале, и для учета этих различий. После калибровки передающих/приемных цепей оценка отклика калиброванного канала, полученная для одной линии (например, ![]()
![]()
![]()
![]()
Способы калибровки, изложенные в настоящем описании, также могут быть использованы для беспроводных коммуникационных систем, которые используют OFDM. При OFDM весь диапазон частот системы эффективно разделяют на несколько (NF) ортогональных поддиапазонов, которые также называются частотными бинами или подканалами. В случае OFDM каждый поддиапазон связан с соответствующей поднесущей, которая может быть модулирована данными. Для MIMO системы, которая использует OFDM (т.е. MIMO-OFDM системы), каждый поддиапазон каждой собственной моды можно рассматривать как независимый канал передачи.The calibration methods described herein can also be used for wireless communication systems that use OFDM. With OFDM, the entire system frequency range is effectively divided into several (N F ) orthogonal subbands, which are also called frequency bins or subchannels. In the case of OFDM, each subband is associated with a corresponding subcarrier that can be modulated with data. For a MIMO system that uses OFDM (i.e., a MIMO-OFDM system), each subband of each eigenmode can be considered an independent transmission channel.
Калибровка может выполняться различными способами. Для ясности конкретная схема калибровки описана ниже для TDD MIMO-OFDM системы. Для такой системы каждый поддиапазон беспроводной линии может рассматриваться как взаимно-обратный.Calibration can be performed in various ways. For clarity, a specific calibration scheme is described below for a TDD MIMO-OFDM system. For such a system, each subband of the wireless line can be considered mutually inverse.
На фиг. 3 показана блок-схема последовательности операций процесса 300 калибровки откликов нисходящего и восходящего каналов в TDD MIMO-OFDM системе. Сначала пользовательский терминал получает тайминг и частоту точки доступа, используя процедуры получения, определенные для данной системы (этап 310). Затем пользовательский терминал может отправить сообщение для инициирования калибровки точкой доступа, или калибровка может быть инициирована точкой доступа. Калибровка может выполняться параллельно с регистрацией/аутентификацией пользовательского терминала точкой доступа (например, во время установки вызова) и также может выполняться по необходимости в любое время.In FIG. 3 is a flowchart of a
Калибровка может выполняться для всех поддиапазонов, которые могут быть использованы для передачи данных (которые называются поддиапазонами “данных”). Поддиапазоны, не используемые для передачи данных (т.е. охранные поддиапазоны), как правило, не требуют калибровки. Однако поскольку частотные отклики передающих/приемных цепей в точке доступа и пользовательском терминале обычно являются равномерными по большинству полос частот, представляющих интерес, и поскольку смежные поддиапазоны с большой вероятностью являются коррелированными, калибровка может выполняться только для подмножества поддиапазонов данных. Если калибруются не все поддиапазоны данных, то информация о поддиапазонах, предназначенных для калибровки (которые называются как “назначенные” поддиапазоны), может быть отправлена в точку доступа (например, в сообщении, отправленном для инициации калибровки).Calibration can be performed for all subbands that can be used to transmit data (which are called “data” subbands). Subbands not used for data transmission (i.e., guard subbands) generally do not require calibration. However, since the frequency responses of the transmitter / receiver chains at the access point and user terminal are usually uniform across most frequency bands of interest, and since adjacent subbands are likely to be correlated, calibration can only be performed on a subset of the data subbands. If not all data subbands are calibrated, then information about the subbands intended for calibration (which are referred to as “assigned” subbands) can be sent to the access point (for example, in a message sent to initiate calibration).
Для калибровки пользовательский терминал передает MIMO пилот-сигнал по назначенным поддиапазонам в точку доступа (этап 312). Генерация MIMO пилот-сигнала описана более подробно ниже. Продолжительность передачи MIMO пилот-сигнала по восходящей линии может зависеть от количества назначенных поддиапазонов. Например, может быть достаточно 8 OFDM символов, если калибровка выполняется для четырех поддиапазонов, а для большего количества поддиапазонов может потребоваться большее количество (например, 20) OFDM символов. Как правило, полная мощность передачи является фиксированной, поэтому если MIMO пилот-сигнал передают по небольшому количеству поддиапазонов, то для каждого из этих поддиапазонов может использоваться более высокий уровень мощности передачи и ОСШ для каждого поддиапазона будет высоким. Напротив, если MIMO пилот-сигнал передают по большому количеству поддиапазонов, тогда для каждого поддиапазона будет использован меньший уровень мощности передачи, и ОСШ для каждого поддиапазона будет хуже. Если ОСШ для каждого поддиапазона не является достаточно высоким, тогда для MIMO пилот-сигнала может быть отправлено большее количество OFDM символов, которые интегрируются в приемнике для получения более высоко общего ОСШ для данного поддиапазона.For calibration, the user terminal transmits a MIMO pilot on the assigned subbands to the access point (step 312). MIMO pilot generation is described in more detail below. The duration of the uplink transmission of the MIMO pilot may depend on the number of assigned subbands. For example, 8 OFDM symbols may be sufficient if calibration is performed for four subbands, and for a larger number of subbands, a larger number (e.g. 20) OFDM symbols may be required. Typically, the total transmit power is fixed, so if a MIMO pilot is transmitted over a small number of subbands, then a higher level of transmit power can be used for each of these subbands and the SNR for each subband will be high. In contrast, if the MIMO pilot is transmitted over a large number of subbands, then a lower transmit power level will be used for each subband, and the SNR for each subband will be worse. If the SNR for each subband is not high enough, then a larger number of OFDM symbols can be sent for the MIMO pilot, which are integrated at the receiver to obtain a higher overall SNR for that subband.
Точка доступа принимает MIMO пилот-сигнал по восходящей линии и выводит оценку отклика восходящего канала, ![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Пользовательский терминал также принимает MIMO пилот-сигнал по нисходящей линии, передаваемый точкой доступа (этап 316) и выводит оценку отклика нисходящего канала, ![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Для вывода поправочных факторов предполагается, что отклики нисходящего и восходящего каналов для каждого поддиапазона являются взаимно-обратными, с поправками для усиления/фазы для учета различий в передающих/приемных цепях точки доступа и пользовательского терминала, которые даются какTo derive correction factors, it is assumed that the responses of the downstream and upstream channels for each subband are mutually inverse, with corrections for gain / phase to account for differences in the transmit / receive chains of the access point and user terminal, which are given as
![]()
![]()
где К представляет собой множество всех поддиапазонов данных. Поскольку во время калибровки доступны только оценки откликов эффективных нисходящих и восходящих каналов для назначенных поддиапазонов, уравнение (8) может быть переписано какwhere K is the set of all data subbands. Since, during calibration, only estimates of the responses of the effective downstream and upstream channels for the assigned subbands are available, equation (8) can be rewritten as
![]()
![]()
где K' представляет собой множество всех назначенных поддиапазонов. Поправочный вектор ![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Поправочные факторы ![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
А. Вычисление отношения матриц A. Calculation of the ratio of matrices
Фиг. 4 представляет собой блок-схему последовательности операций варианта осуществления процесса 320а для вывода поправочных векторов ![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Сначала для каждого назначенного поддиапазона вычисляют (Nut×Nap) матрицу ![]()
![]()
где отношение вычисляют поэлементно. Каждый элемент ![]()
![]()
где ![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
В одном из вариантов осуществления поправочный вектор для точки доступа, ![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Затем среднее значение нормированных строк определяют как сумма Nut нормированных строк, деленная на Nut (этап 424). Поправочный вектор ![]()
![]()
![]()
![]()
Вследствие нормировки первый элемент ![]()
![]()
В одном из вариантов осуществления поправочный вектор для пользовательского терминала, ![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Затем среднее обратных значений нормированных столбцов определяют как сумму обратных значений Nap нормированных столбцов, деленную на Nap (этап 434). Поправочный вектор ![]()
![]()
![]()
![]()
где обратные значения нормированных столбцов, ![]()
![]()
В. MMSE вычисление B. MMSE calculation
Для MMSE вычисления поправочные факторы ![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
что также может быть записано какwhich can also be written as
![]()
![]()
где ![]()
![]()
![]()
![]()
На уравнение (16) наложено ограничение, заключающееся в том, что первый элемент ![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
MMSE вычисление выполняют для каждого назначенного поддиапазона для получения поправочных факторов ![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Среднеквадратичная ошибка может быть переписана, исходя из уравнения (16), следующим образом:The root mean square error can be rewritten based on equation (16) as follows:

и опять же с учетом ограничения ![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
В уравнении (18а) ![]()
![]()
Набор из (Nap+Nut-1) уравнений в наборах уравнений (18a) и (18b) может быть с большим удобством выражен в матричном виде следующим образом:The set of (N ap + N ut -1) equations in the sets of equations (18a) and (18b) can be expressed with great convenience in matrix form as follows:
![]()
![]()
где Where



Матрица ![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Поправочные факторы включены в вектор ![]()
![]()
![]()
![]()
Результат MMSE вычисления представляет собой поправочные матрицы ![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Поправочные матрицы ![]()
![]()
![]()
![]()
С. Дополнительные вычисления C. Additional calculations
Вне зависимости от конкретного способа вычисления, выбранного для использования, после завершения вычисления поправочных матриц пользовательский терминал посылает в точку доступа поправочные вектора для точки доступа, ![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Пару поправочных векторов ![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Впоследствии точка доступа и пользовательский терминал используют их соответствующие поправочные вектора ![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Описанная выше схема калибровки, посредством которой получают вектор поправочных факторов как для точки доступа, так и для пользовательского терминала, дает возможность вывода “совместимых” поправочных векторов для точки доступа, когда калибровка выполняется различными пользовательскими терминалами. Если калибровка в точке доступа уже выполнена (например, одним или несколькими пользовательскими терминалами), то текущие поправочные вектора могут обновляться при помощи вновь выведенных поправочных векторов.The calibration scheme described above, by which a vector of correction factors is obtained for both the access point and the user terminal, makes it possible to derive “compatible” correction vectors for the access point when calibration is performed by various user terminals. If the calibration at the access point has already been performed (for example, by one or more user terminals), then the current correction vectors can be updated using the newly derived correction vectors.
Например, если два пользовательских терминала одновременно выполняют процедуру калибровки, тогда результаты калибровки от этих пользовательских терминалов могут быть усреднены для улучшения производительности. Однако, как правило, калибровка выполняется для одного пользовательского терминала единовременно. Таким образом, второй пользовательский терминал видит нисходящую линию, для которой уже использован поправочный вектор для первого пользовательского терминала. В этом случае произведение второго поправочного вектора и старого поправочного вектора может быть использовано в качестве нового поправочного вектора или также может быть использовано “взвешенное усреднение” (описанное ниже). Как правило, точка доступа использует один поправочный вектор для всех пользовательских терминалов, а не различные поправочные вектора для различных пользовательских терминалов (хотя такой вариант также может быть реализован). Обновление от множества пользовательских терминалов или последовательные обновления от одного пользовательского терминала могут обрабатываться одним и тем же способом. обновленные вектора могут применяться непосредственно (при помощи операции умножения). В качестве альтернативы, в случае, если требуется некоторое усреднение для уменьшения шума измерения, может быть использовано взвешенное усреднение, как описано ниже.For example, if two user terminals are simultaneously performing a calibration procedure, then the calibration results from these user terminals can be averaged to improve performance. However, as a rule, calibration is performed for one user terminal at a time. Thus, the second user terminal sees a downlink for which the correction vector for the first user terminal has already been used. In this case, the product of the second correction vector and the old correction vector can be used as a new correction vector, or “weighted averaging” (described below) can also be used. Typically, an access point uses one correction vector for all user terminals, rather than different correction vectors for different user terminals (although this option can also be implemented). Updates from multiple user terminals or consecutive updates from a single user terminal can be handled in the same way. updated vectors can be applied directly (using the multiplication operation). Alternatively, if some averaging is required to reduce the measurement noise, a weighted averaging can be used, as described below.
Таким образом, если точка доступа использует поправочные вектора ![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
В одном из вариантов осуществления обновленные поправочные вектора определяют как ![]()
![]()
![]()
![]()
![]()
![]()
Как указывалось выше, калибровка может выполняться не для всех поддиапазонов данных. Например, калибровка может выполняться для каждого n-го поддиапазона, где n может определяться из ожидаемого отклика передающих/приемных цепей (например, n может быть 2, 4, 8, 16 и т.д.). Калибровка также может выполняться для неравномерно распределенных поддиапазонов. Например, поскольку на границах диапазона частот характеристика фильтра может иметь больший спад, что может создавать большее несоответствие в передающих/приемных цепях, то на границах полосы частот может выполняться калибровка большего количества поддиапазонов. В общем случае может выполняться калибровка любого количества поддиапазонов, распределенных любым образом, и это находится в пределах объема настоящего изобретения.As indicated above, calibration may not be performed for all data subbands. For example, calibration can be performed for each n-th subband, where n can be determined from the expected response of the transmit / receive chains (for example, n may be 2, 4, 8, 16, etc.). Calibration can also be performed for unevenly distributed subbands. For example, since at the borders of the frequency range, the filter characteristic may have a larger drop, which may create more mismatch in the transmit / receive chains, then more sub-bands can be calibrated at the borders of the frequency band. In general, any number of subbands distributed in any way can be calibrated, and this is within the scope of the present invention.
В приведенном выше описании поправочные вектора ![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Схема калибровки, описанная выше, позволяет каждому пользовательскому терминалу калибровать свои передающие/приемные цепи в реальном масштабе времени при передаче по радиоканалу. Это позволяет пользовательским терминалам с различными частотными откликами обеспечивать высокую производительность без жестких требований на частотный отклик или выполнение калибровки при изготовлении. Точка доступа может быть калибрована множеством пользовательских терминалов для обеспечения улучшенной точности.The calibration scheme described above allows each user terminal to calibrate its transmit / receive circuits in real time during transmission over the air. This allows user terminals with different frequency responses to provide high performance without stringent requirements for frequency response or calibration during manufacturing. The access point can be calibrated by a variety of user terminals to provide improved accuracy.
D. Усиление D. Reinforcement
Калибровка может выполняться, основываясь на нормированных усилениях для нисходящего и восходящего каналов, которые представляют собой усиления относительно уровня шума в приемнике. После выполнения калибровки нисходящей линии и восходящей линии использование нормированных усилений позволяет получать характеристики одной линии (в том числе усиления каналов и ОСШ для каждой собственной моды), основываясь на измерениях усилений для другой линии.Calibration can be performed based on the normalized gains for the downstream and upstream channels, which are gains relative to the noise level at the receiver. After calibrating the downlink and uplink, the use of normalized gains allows you to obtain the characteristics of one line (including channel gains and SNR for each eigenmode), based on measurements of gains for the other line.
Точка доступа и пользовательский терминал могут вначале выполнить балансировку входных уровней своих приемников таким образом, что уровни шума в приемных цепях точки доступа и пользовательского терминала будут примерно одинаковыми. Балансировка может быть выполнена путем оценки уровня шума, то есть определения секции принятого TDD кадра (т.е. единицы передачи по нисходящей/восходящей линии), которая имеет минимальную среднюю мощность за конкретный промежуток времени (например, один или два периодов символов). В общем случае временной интервал непосредственно перед началом каждого TDD кадра является свободным от передач, поскольку любые данные восходящей линии должны быть приняты точкой доступа, и затем должно быть выполнено переключение прием/передача, занимающее некоторое время, перед началом передачи точки доступа по нисходящей линии. В зависимости от помеховой обстановки уровень шума может определяться, основываясь на нескольких TDD кадрах. Затем выполняют измерение откликов нисходящего и восходящего канала относительно этого уровня шума. Более точно, усиление канала для данного поддиапазона данной пары передающей/приемной антенн может быть получено, например, в виде отношения принятых пилотных символов к переданным пилотным символам для этого поддиапазона данной пары передающей/приемной антенн. При этом нормированное усиление представляет собой измеренное усиление, деленное на уровень шума.The access point and the user terminal can first balance the input levels of their receivers so that the noise levels in the receive circuits of the access point and the user terminal are approximately the same. Balancing can be done by estimating the noise level, that is, determining a section of a received TDD frame (i.e., a downlink / uplink transmission unit) that has a minimum average power over a specific time period (for example, one or two symbol periods). In the general case, the time interval immediately before the start of each TDD frame is transmission free, since any uplink data must be received by the access point, and then a transmit / receive switch must take some time before the access point begins to transmit on the downlink. Depending on the interference environment, the noise level can be determined based on several TDD frames. Then measure the responses of the downward and upward channel relative to this noise level. More specifically, the channel gain for a given subband of a given pair of transmit / receive antennas can be obtained, for example, as the ratio of the received pilot symbols to transmitted pilot symbols for this subband of a given pair of transmit / receive antennas. In this case, the normalized gain is the measured gain divided by the noise level.
Большое отличие нормированных усилений для точки доступа и нормированных усилений для пользовательского терминала может привести к тому, что поправочные факторы для пользовательского терминала могут сильно отличаться от единицы. Поправочные факторы для точки доступа являются близкими к единице, поскольку первый элемент матрицы ![]()
![]()
Если поправочные факторы для пользовательского терминала сильно отличаются от единицы, то пользовательский терминал может быть не способен использовать вычисленные поправочные факторы. Это может происходить вследствие того, что пользовательский терминал имеет ограничение на его максимальную мощность передачи и может быть не в состоянии увеличить мощность передачи для больших поправочных факторов. Помимо этого, уменьшение мощности передачи для малых поправочных факторов в общем случае не является желательным, поскольку это может снизить скорость передачи данных.If the correction factors for the user terminal are very different from unity, then the user terminal may not be able to use the calculated correction factors. This may be due to the fact that the user terminal has a limit on its maximum transmit power and may not be able to increase the transmit power for large correction factors. In addition, a decrease in transmit power for small correction factors is generally not desirable, as this can reduce the data rate.
Таким образом, пользовательский терминал может вести передачу, используя масштабированную версию вычисленных поправочных факторов. Масштабированные факторы калибровки могут быть получены при помощи масштабирования вычисленных поправочных факторов на конкретный масштаб, который может быть установлен равным разнице в усилениях (в виде разности или отношения) между откликами нисходящего и восходящего каналов. Такая разница в усилениях может быть вычислена как среднее разностей (или разниц) между нормированными усилениями для нисходящей линии и восходящей линии. Масштаб (или разница в усилениях), используемый для поправочных факторов в пользовательском терминале, может быть отправлен в точку доступа вместе с вычисленными поправочными факторами для точки доступа.Thus, the user terminal can transmit using a scaled version of the calculated correction factors. Scaled calibration factors can be obtained by scaling the calculated correction factors to a specific scale, which can be set equal to the difference in gains (in the form of a difference or ratio) between the responses of the downstream and upstream channels. Such a difference in gains can be calculated as the average of the differences (or differences) between the normalized gains for the descending line and the ascending line. The scale (or gain difference) used for the correction factors in the user terminal can be sent to the access point along with the calculated correction factors for the access point.
При наличии поправочных факторов и масштаба или разницы в усилениях характеристики нисходящего канала могут быть определены из измеренного отклика восходящего канала и наоборот. Если уровень шума либо в точке доступа, либо в пользовательском терминале изменяется, то разница в усилениях может быть обновлена, и обновленная разница в усилениях может быть отправлена в сообщении другой сущности.If there are correction factors and the scale or difference in amplifications, the characteristics of the downlink can be determined from the measured response of the uplink and vice versa. If the noise level at either the access point or the user terminal changes, then the gain difference can be updated, and the updated gain difference can be sent in the message of another entity.
В вышеприведенном описании калибровка приводила к двум наборам (векторов или матриц) поправочных факторов для каждого поддиапазона, причем один набор использовался в точке доступа для передачи данных по нисходящей линии, а другой набор использовался в пользовательском терминале для передачи данных по восходящей линии. Калибровка также может быть выполнена таким образом, что для каждого поддиапазона обеспечиваются два набора поправочных факторов, причем один набор используется в точке доступа для приема данных по восходящей линии, а второй набор используется в пользовательском терминале для приема данных по нисходящей линии. Калибровка также может быть выполнена таким образом, что для каждого поддиапазона получают один набор поправочных факторов, и этот набор может быть использован либо в точке доступа, либо в пользовательском терминале. В общем случае, калибровку выполняют таким образом, что отклики калиброванных нисходящих и восходящих каналов являются взаимно-обратными вне зависимости от того, где применяют поправочные факторы.In the above description, calibration led to two sets (vectors or matrices) of correction factors for each subband, with one set being used at the access point for downlink data, and the other set being used at the user terminal for uplink data. Calibration can also be performed in such a way that two sets of correction factors are provided for each subband, with one set being used at the access point to receive data on the uplink, and the second set is used at the user terminal for receiving data on the downlink. Calibration can also be performed in such a way that for each subband one set of correction factors is obtained, and this set can be used either at the access point or in the user terminal. In general, calibration is performed in such a way that the responses of the calibrated downstream and upstream channels are mutually inverse, regardless of where the correction factors are applied.
2. MIMO пилот-сигнал 2. MIMO pilot
Для калибровки MIMO пилот-сигнал передается пользовательским терминалом по восходящей линии для того, чтобы дать возможность точке доступа оценить отклик восходящего канала, и MIMO пилот-сигнал передается точкой доступа по нисходящей линии, чтобы дать возможность пользовательскому терминалу оценить отклик нисходящего канала. Для нисходящей линии и восходящей линии могут использоваться одинаковые или разные MIMO пилот-сигналы, и используемые MIMO пилот-сигналы являются известными как в точке доступа, так и в пользовательском терминале.For calibration, the MIMO pilot is transmitted by the user terminal in an uplink to enable the access point to evaluate the uplink response, and the MIMO pilot is transmitted by the access point in a downlink to allow the user terminal to evaluate the downlink. For the downlink and the uplink, the same or different MIMO pilots can be used, and the used MIMO pilots are known at both the access point and the user terminal.
В одном из вариантов осуществления MIMO пилот-сигнал содержит определенный OFDM символ (обозначаемый “P”), который передают через каждую из NT передающих антенн, где NT=Nap для нисходящей линии и NT=Nut для восходящей линии. Для каждой передающей антенны один и тот же OFDM символ P передают в каждом периоде символа, назначенном для передачи MIMO пилот-сигнала. Однако OFDM символы P для каждой антенны являются покрытыми различными последовательностями Уолша с N элементарными сигналами, назначенными этой антенне, где N≥Nap для нисходящей линии и N≥Nut для восходящей линии. Покрытие Уолша поддерживает ортогональность между NT передающими антеннами и позволяет приемнику различать отдельные передающие антенны.In one embodiment, the MIMO pilot contains an OFDM symbol (denoted by “P”), which is transmitted through each of the N T transmit antennas, where N T = N ap for the downlink and N T = N ut for the uplink. For each transmit antenna, the same OFDM symbol P is transmitted in each symbol period assigned to transmit the MIMO pilot. However, OFDM symbols P for each antenna are covered by different Walsh sequences with N chips assigned to this antenna, where N≥N ap for the downlink and N≥N ut for the uplink. Walsh coverage maintains orthogonality between N T transmit antennas and allows the receiver to distinguish between individual transmit antennas.
OFDM символ P включает в себя один символ модуляции для каждого из Nsb назначенных поддиапазонов. OFDM символ P таким образом содержит определенное “слово” из Nsb символов модуляции, которое может быть выбрано для облегчения оценки канала приемником. Это слово также может быть определено для минимизации изменений отношения пикового значения к среднему при передаче MIMO пилот-сигнала. Это уменьшает величину искажений и нелинейности, генерируемых передающими/приемными цепями, что в свою очередь приводит к улучшению точности оценки канала.The OFDM symbol P includes one modulation symbol for each of the N sb assigned subbands. The OFDM symbol P thus contains a certain “word” of N sb modulation symbols that can be selected to facilitate channel estimation by the receiver. This word can also be defined to minimize peak-to-average ratios when transmitting a MIMO pilot. This reduces the amount of distortion and non-linearity generated by the transmit / receive circuits, which in turn leads to improved channel estimation accuracy.
Для ясности ниже описан определенный MIMO пилот-сигнал для определенной MIMO-OFDM системы. Для этой системы как точка доступа, так и пользовательский терминал снабжены четырьмя приемными/передающими антеннами. Полоса частот системы разделена на 64 ортогональных поддиапазона (т.е. NF=64), которым присвоены индексы от +31 до -32. Из этих 64 поддиапазонов 48 поддиапазонов (например, с индексами ±{1, …, 6, 8, …, 20, 22, …, 26}) используются для данных, 4 поддиапазона (например, ±{7, 21}) используются для пилот-сигнала и, возможно, для сигнализации, поддиапазон DC (с индексом 0) не используется, и оставшиеся поддиапазоны также не используются и служат в качестве охранных поддиапазонов. Такая структура OFDM поддиапазонов более подробно описана в документе стандарта IEEE 802.11а, озаглавленном “Part 11: Wireless LAN Medium Access Control (MAC) and Physical Layer (PHY) specifications: High-speed Physical Layer in the 5 GHz Band”, сентябрь 1999 год, который является общедоступным и включен в настоящее описание во всей своей полноте в качестве ссылки.For clarity, a specific MIMO pilot is described below for a specific MIMO-OFDM system. For this system, both the access point and the user terminal are equipped with four transmit / receive antennas. The system frequency band is divided into 64 orthogonal subbands (i.e., N F = 64), which are assigned indices from +31 to -32. Of these 64 sub-bands, 48 sub-bands (for example, with indices ± {1, ..., 6, 8, ..., 20, 22, ..., 26}) are used for data, 4 sub-bands (for example, ± {7, 21}) are used for of the pilot signal and possibly for signaling, the DC subband (with index 0) is not used, and the remaining subbands are also not used and serve as guard subbands. This OFDM subband structure is described in more detail in IEEE 802.11a, entitled “Part 11: Wireless LAN Medium Access Control (MAC) and Physical Layer (PHY) specifications: High-speed Physical Layer in the 5 GHz Band,” September 1999 , which is publicly available and incorporated herein by reference in its entirety.
OFDM символ P включает в себя набор из 52 QPSK символов модуляции для 48 поддиапазонов данных и 4 поддиапазонов пилот-сигнала. Указанный OFDM символ P может иметь следующий вид:The OFDM symbol P includes a set of 52 QPSK modulation symbols for 48 data subbands and 4 pilot subbands. The indicated OFDM symbol P may have the following form:
P(вещественный)=g·{0,0,0,0,0,0,-1,-1,-1,-1,1,1,1,-1, -1,1,-1,1,1,1,1,-1,-1,1,-1,1,-1,-1,-1,-1,1,-1,P (real) = g · {0,0,0,0,0,0,0, -1, -1, -1, -1,1,1,1, -1, -1,1, -1,1 , 1,1,1, -1, -1,1, -1,1, -1, -1, -1, -1,1, -1,
0,1,-1,-1,-1,-1,1,-1,-1,-1,-1,1,1,-1,-1,1,-1,-1,1,1, -1,1,-1,1,-1,1,-1,0,0,0,0,0},0,1, -1, -1, -1, -1,1, -1, -1, -1, -1,1,1, -1, -1,1, -1, -1,1, 1, -1,1, -1,1, -1,1, -1,0,0,0,0,0,0},
P(мнимый)=g·{0,0,0,0,0,0,-1,1,1,1,-1,-1,1,-1,1,1,1,-1,1, -1,-1,-1,-1,-1,-1,1,1,-1,1,1,-1,1,P (imaginary) = g · {0,0,0,0,0,0,0, -1,1,1,1, -1, -1,1, -1,1,1,1, -1,1 , -1, -1, -1, -1, -1, -1,1,1, -1,1,1, -1,1,
0,-1,-1,-1,-1,1,1,-1,1,-1,-1,1,-1,1,-1,1,1,1, -1,1,1,1,1,1,1,-1,-1,0,0,0,0,0}, 0, -1, -1, -1, -1,1,1, -1,1, -1, -1,1, -1,1, -1,1,1,1, -1,1, 1,1,1,1,1,1 -1 -1,0,0,0,0,0,0}
где g представляет собой усиление для пилот-сигнала. Значения внутри скобок {} даны для поддиапазонов с индексами от -32 по -1 (для первой строки) и от 0 до +31 (для второй строки). Таким образом, первая строка для Р(вещественный) и Р(мнимый) указывает, что символ (-1-j) передается в поддиапазоне -26, символ (-1+j) передается в поддиапазоне -25 и т.д. Вторая строка для Р(вещественный) и Р(мнимый) указывает, что символ (1-j) передается в поддиапазоне 1, символ (-1-j) передается в поддиапазоне 2 и т.д. Для MIMO пилот-сигнала также могут использоваться другие OFDM символы.where g is the gain for the pilot signal. The values inside the brackets {} are given for subbands with indices from -32 to -1 (for the first line) and from 0 to +31 (for the second line). Thus, the first line for P (real) and P (imaginary) indicates that the character (-1-j) is transmitted in the subband -26, the character (-1 + j) is transmitted in the subband -25, etc. The second line for P (real) and P (imaginary) indicates that the character (1-j) is transmitted in
В одном из вариантов осуществления четырем передающим антеннам для MIMO пилот-сигнала назначены последовательности Уолша W1=1111, W2=1010, W3=1100 W4=1001. Для данной последовательности Уолша значение “1” указывает, что передается OFDM символ P, и значение “0” указывает, что передается OFDM символ -P (т.е. каждый из 52 символов модуляции в Р является инвертированным).In one embodiment, the four transmit antennas for the MIMO pilot are assigned Walsh sequences W 1 = 1111, W 2 = 1010, W 3 = 1100 W 4 = 1001. For this Walsh sequence, a value of “1” indicates that an OFDM symbol P is being transmitted, and a value of “0” indicates that an OFDM symbol -P is being transmitted (i.e., each of the 52 modulation symbols in P is inverted).
В таблице 1 перечислены OFDM символы, передаваемые через каждую из четырех передающих антенн при передаче MIMO пилот-сигнала с длительностью 4 периода символов.Table 1 lists the OFDM symbols transmitted through each of the four transmit antennas when transmitting a MIMO pilot with a duration of 4 symbol periods.
Для более длительных передач MIMO пилот-сигнала последовательности Уолша для каждой передающей антенны повторяются. Для такого набора последовательностей Уолша передача MIMO пилот-сигнала выполняется в течение количества периодов символов, кратного 4 периодам символов для гарантии ортогональности между четырьмя передающими антеннами.For longer MIMO transmissions of the pilot, the Walsh sequences for each transmit antenna are repeated. For such a set of Walsh sequences, pilot MIMO transmission is performed over a number of symbol periods a multiple of 4 symbol periods to ensure orthogonality between the four transmit antennas.
Приемник может вывести оценку отклика канала, основываясь на принятом MIMO пилот-сигнале путем выполнения комплиментарной обработки. В частности, для восстановления пилот-сигнала, переданного через передающую антенну i и принятого приемной антенной j, пилот-сигнал, принятый приемной антенной j сначала обрабатывается с последовательностью Уолша, назначенной передающей антенне i способом, комплиментарным покрытию Уолша, выполняемому в передатчике. OFDM символы со снятым покрытием для всех Nps периодов символов для MIMO пилот-сигнала затем суммируются, причем суммирование выполняют индивидуально для каждого из 52 поддиапазонов, используемых для передачи MIMO пилот-сигнала. Результатом суммирования является ![]()
![]()
Такая же обработка может быть выполнена для восстановления пилот-сигнала от каждой передающей антенны в каждую приемную антенну. Обработка пилот-сигнала предоставляет Nap·Nut значений, которые являются элементами оценки отклика эффективного канала, ![]()
![]()
![]()
![]()
Описанная выше оценка канала может быть выполнена как точкой доступа, так и пользовательским терминалом во время калибровки для получения оценки отклика эффективного восходящего канала, ![]()
![]()
![]()
![]()
3. Пространственная обработка 3. Spatial processing
Для упрощения оценки канала и пространственной обработки в точке доступа и пользовательском терминале для TDD MIMO и MIMO-OFDM систем может быть использована корреляция между откликами нисходящего и восходящего каналов. Такое упрощение является возможным после выполнения калибровки для учета различий в передающих/приемных цепях. Как указывалось выше, отклики калиброванных каналов представляют собой:To simplify channel estimation and spatial processing at the access point and user terminal for TDD MIMO and MIMO-OFDM systems, a correlation between downlink and uplink responses can be used. This simplification is possible after performing calibration to account for differences in the transmit / receive chains. As indicated above, the responses of calibrated channels are:
![]()
для нисходящей линии и ![]()
for the downlink and
![]()
для восходящей линии. ![]()
for the ascending line.
Последнее равенство в уравнении (21b) появляется вследствие взаимосвязи между откликами эффективного нисходящего и восходящего каналов, ![]()
![]()
Матрица ![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Разложение по сингулярным значениям матрицы откликов калиброванного восходящего канала ![]()
![]()
![]()
![]()
где ![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Унитарная матрица М характеризуется свойством ![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Таким образом, матрицы ![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Разложение по сингулярным значениям более подробно описано в работе Gilbert Strang, озаглавленной “Linear Algebra and Its Applications”, второе издание, Academic Press, 1980.Singular value decomposition is described in more detail in Gilbert Strang, entitled “Linear Algebra and Its Applications”, second edition, Academic Press, 1980.
Пользовательский терминал может выполнить оценку отклика калиброванного нисходящего канала, основываясь на MIMO пилот-сигнале, переданном точкой доступа. После этого пользовательский терминал может выполнить разложение по сингулярным значениям оценки отклика калиброванного нисходящего канала, ![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Аналогично точка доступа может выполнить оценку отклика калиброванного восходящего канала, основываясь на MIMO пилот-сигнале, передаваемом пользовательским терминалом. Затем точка доступа может выполнить разложение по сингулярным значениям оценки отклика калиброванного восходящего канала, ![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Вследствие того, что канал и калибровка являются взаимно-обратными, разложение по сингулярным значениям можно выполнять либо только в пользовательском терминале, либо только в точке доступа для получения как матриц ![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Точка доступа также может иметь возможность получить матрицы ![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Матрицы ![]()
![]()
![]()
![]()
А. Пространственная обработка для восходящей линии A. Spatial processing for the uplink
Пространственная обработка в пользовательском терминале для передачи по восходящей линии может быть выражена как Spatial processing in the user terminal for uplink transmission can be expressed as
![]()
![]()
где ![]()
![]()
![]()
![]()
Также перед передачей может быть произведена дополнительная обработка символов модуляции. Например, для поддиапазонов данных (например, для каждой собственной моды) может быть применена инверсия канала таким образом, что ОСШ при приеме будет приблизительно одинаковым для всех поддиапазонов данных. При этом пространственная обработка может быть выражена какAlso, before transmission, additional processing of modulation symbols may be performed. For example, for data subbands (for example, for each eigenmode), channel inversion can be applied such that the reception SNR is approximately the same for all data subbands. In this case, the spatial processing can be expressed as
![]()
![]()
где ![]()
![]()
Инверсия канала также может быть выполнена путем назначения мощности передачи каждому поддиапазону перед выполнением модуляции, и в этом случае вектор ![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Инверсия канала может быть выполнена, как описано в вышеупомянутой предварительной заявке на патент США № 60/421309, и в заявке на патент США № 10/229209, озаглавленной “Coded MIMO Systems with Selective Channel Inversion Applied Per Eigenmode”, поданной 27 августа 2002 года, права на которую принадлежат правообладателю настоящей заявки на патент и которая включена в настоящее описание во всей своей полноте в качестве ссылки. Channel inversion can be performed as described in the aforementioned provisional application for US patent No. 60/421309, and in patent application US No. 10/229209, entitled "Coded MIMO Systems with Selective Channel Inversion Applied Per Eigenmode", filed August 27, 2002 , the rights to which belong to the copyright holder of this patent application and which is incorporated into this description in its entirety by reference.
Принятая передача по восходящей линии в точке доступа может быть выражена какThe received uplink transmission at the access point may be expressed as
![]()
![]()
![]()
![]()
где ![]()
![]()
![]()
![]()
![]()
![]()
Пространственная обработка (или согласованная фильтрация) в точке доступа для принятой передачи по восходящей линии может быть выражена какThe spatial processing (or matched filtering) at the access point for a received uplink transmission can be expressed as
![]()
![]()
![]()
![]()
![]()
![]()
где ![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
В. Пространственная обработка для нисходящей линии B. Spatial downlink processing
Пространственная обработка в точке доступа для передачи по нисходящей линии может быть представлена какSpatial processing at the access point for downlink transmission can be represented as
![]()
![]()
где ![]()
![]()
![]()
![]()
Опять, перед передачей может быть произведена дополнительная обработка (например, инверсия канала) символов модуляции. При этом пространственная обработка может быть выражена какAgain, additional processing (e.g., channel inversion) of modulation symbols may be performed before transmission. In this case, the spatial processing can be expressed as
![]()
![]()
где ![]()
![]()
Принятая передача по нисходящей линии в пользовательском терминале может быть выражена какThe received downlink transmission in the user terminal may be expressed as
![]()
![]()
![]()
![]()
где ![]()
![]()
Пространственная обработка (или согласованная фильтрация) в пользовательском терминале для принятой передачи по нисходящей линии может быть выражена какSpatial processing (or matched filtering) in a user terminal for a received downlink transmission can be expressed as
![]()
![]()
![]()
![]()
![]()
![]()
В уравнении (31) предполагается, что инверсия канала не выполняется в передатчике и что принятый вектор ![]()
![]()
В таблице 2 представлена пространственная обработка в точке доступа и пользовательском терминале для передачи и приема данных. В таблице 2 предполагается, что дополнительная обработка ![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
В приведенном выше описании и как показано в таблице 2, поправочные матрицы ![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
4. Система MIMO-OFDM 4. MIMO-OFDM system
Фиг.5 представляет собой блок-схему варианта осуществления точки 502 доступа и пользовательского терминала 504 в системе TDD MIMO-OFDM. Для простоты в нижеследующем описании предполагается, что и точка доступа, и пользовательский терминал оборудованы четырьмя приемными/передающими антеннами.5 is a block diagram of an embodiment of an access point 502 and a user terminal 504 in a MIMO-OFDM TDD system. For simplicity, the following description assumes that the access point and user terminal are equipped with four transmit / receive antennas.
В случае нисходящей линии в точке 502 доступа передающий (TX) процессор 510 данных принимает данные трафика (т.е. информационные биты) из источника данных 508 и сигнализацию и другую информацию из контроллера 530. TX процессор 510 данных форматирует, кодирует, выполняет перемежение и модуляцию (т.е. отображение символов) данных для обеспечения потока символов модуляции для каждой собственной моды, используемой для передачи данных. TX пространственный процессор 520 принимает потоки символов модуляции от TX процессора 510 данных и выполняет пространственную обработку для обеспечения четырех потоков символов передачи, один поток для каждой антенны. TX пространственный процессор 520 также выполняет дополнительное мультиплексирование пилотных символов, как это требуется (например, для калибровки).In the case of a downlink at access point 502, a transmitting (TX) data processor 510 receives traffic data (i.e., information bits) from a data source 508 and signaling and other information from a controller 530. TX data processor 510 formats, codes, interleaves, and interleaves and modulation (i.e., symbol mapping) of the data to provide a modulation symbol stream for each eigenmode used to transmit the data. TX spatial processor 520 receives modulation symbol streams from TX data processor 510 and performs spatial processing to provide four transmit symbol streams, one stream for each antenna. TX spatial processor 520 also performs additional pilot symbol multiplexing as required (eg, for calibration).
Каждый модулятор (MOD) 522 принимает и обрабатывает соответствующий поток символов передачи для обеспечения соответствующего потока OFDM символов. Каждый поток OFDM символов дополнительно обрабатывается в передающей цепи в модуляторе 522 для обеспечения соответствующего модулированного сигнала нисходящей линии. Затем четыре модулированных сигнала от модулятора 522а-522d передаются через четыре антенны 524а-524d, соответственно.Each modulator (MOD) 522 receives and processes a respective transmit symbol stream to provide a corresponding OFDM symbol stream. Each OFDM symbol stream is further processed in a transmit chain in modulator 522 to provide a corresponding downlink modulated signal. Then, four modulated signals from modulator 522a through 522d are transmitted through four antennas 524a through 524d, respectively.
В пользовательском терминале 504 антенны 522 принимают переданные модулированные сигналы нисходящей линии и каждая антенна предоставляет принятый сигнал в соответствующий демодулятор (DEMOD) 554. Каждый демодулятор 554 (который включает в себя приемную цепь) выполняет обработку, комплиментарную выполняемой в модуляторе 522, и предоставляет принятые символы. Приемный (RX) пространственный процессор 560 затем выполняет пространственную обработку от всех демодуляторов 554 для обеспечения восстановленных символов, которые представляют собой оценки символов модуляции, переданных точкой доступа. Во время калибровки RX пространственный процессор 560 предоставляет оценку калиброванного нисходящего канала, ![]()
![]()
RX процессор 570 данных обрабатывает (например, выполняет обратное отображение символов, обратное перемежение и декодирование) восстановленных символов для обеспечения декодированных данных. Декодированные данные могут включать в себя восстановленные данные трафика, сигнализацию и т.д. и которые предоставляются потребителю 572 данных для сохранения и/или в контроллер 580 для дальнейшей обработки. Во время калибровки RX процессор 570 данных предоставляет оценку калиброванного восходящего канала, ![]()
![]()
Контроллеры 530 и 580 управляют работой различных блоков обработки в точке доступа и пользовательском терминале, соответственно. Во время калибровки контроллер 580 может принимать оценки ![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Обработка в случае восходящей линии может быть такой же, как и обработка в случае нисходящей линии или отличающейся от нее. Данные и сигнализация обрабатываются (например, выполняется кодирование, перемежение и модуляция) в TX процессоре 590 данных с последующей пространственной обработкой в TX пространственном процессоре 592, который также выполняет дополнительное мультиплексирование пилотных символов во время калибровки. Пилотные символы и символы модуляции дополнительно обрабатываются в модуляторах 554 для генерации модулированных сигналов восходящей линии, которые затем передаются через антенны 552 в точку доступа.The processing in the case of an uplink may be the same as the processing in the case of a downlink or different from it. Data and signaling are processed (eg, coding, interleaving and modulation) in TX data processor 590, followed by spatial processing in TX spatial processor 592, which also performs additional pilot symbol multiplexing during calibration. Pilot and modulation symbols are further processed in modulators 554 to generate modulated uplink signals, which are then transmitted via antennas 552 to the access point.
В точке 110 доступа модулированные сигналы восходящей линии принимаются антеннами 524, демодулируются в демодуляторах 522 и обрабатываются в RX пространственном процессоре 540 и RX процессоре 542 данных способом, комплиментарным выполняемому в пользовательском терминале. Во время калибровки RX пространственный процессор 560 также предоставляет оценку ![]()
![]()
![]()
![]()
Фиг.6 представляет собой блок-схему TX пространственного процессора 520а, который может быть использован в качестве TX пространственных процессоров 520 и 592 по Фиг.5. Для простоты в нижеследующем описании предполагается, что для использования выбраны все четыре собственные моды.6 is a block diagram of a TX
В процессоре 520а демультиплексор 632 принимает четыре потока символов модуляции (обозначенных s1(n)-s4(n)) для передачи на четырех собственных модах, демультиплексирует каждый поток на ND подпотока для ND поддиапазонов данных и предоставляет четыре подпотока символов модуляции для каждого поддиапазона в соответствующий TX пространственный процессор 640 поддиапазона. Каждый процессор 640 выполняет обработку, описываемую уравнением (24), (25), (28) или (29), для одного поддиапазона.In
В каждом TX пространственном процессоре 640 поддиапазона четыре подпотока (обозначаемые s1(k)-s4(k)) символов модуляции предоставляются в четыре умножителя 642а-642d, которые также принимают усиления g1(k), g2(k), g3(k) и g4(k) для четырех собственных мод соответствующего поддиапазона. В случае нисходящей линии четыре усиления для каждого поддиапазона данных представляют собой диагональные элементы соответствующей матрицы ![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Каждый формирователь 650 луча выполняет формирование луча для передачи одного подпотока символов в одной собственной моде одного поддиапазона. Каждый формирователь 650 пучка принимает один подпоток sm(k) масштабированных символов и выполняет формирование пучка, используя собственный вектор ![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Каждый сумматор 660 принимает и суммирует четыре обработанных для формирования луча символа для четырех собственных мод для каждого периода символа для обеспечения подвергнутого предварительной обработке символа для соответствующей передающей антенны. Сумматоры 660a-660d предоставляют четыре подпотока подвергнутых предварительной обработке символа, для четырех передающих антенн в буферы/мультиплексоры 670a-670d, соответственно.Each adder 660 receives and summarizes four beamformed symbols for four eigenmodes for each symbol period to provide preprocessed symbol for a respective transmit antenna.
Каждый буфер/мультиплексор 670 принимает пилотные символы и подвергнутые предварительной обработке символы от TX пространственных процессоров 640 поддиапазонов для ND поддиапазонов данных. Каждый буфер/мультиплексор 670 затем мультиплексирует пилотные символы, подвергнутые предварительной обработке символы и нули для пилотных поддиапазонов, поддиапазонов данных и неиспользуемых поддиапазонов, соответственно, для формирования последовательности из NF символов передачи для данного периода символа. Во время калибровки пилотные символы передаются по назначенным поддиапазонам. Умножители 668а-668d выполняют покрытие пилотных символов для четырех антенн последовательностями Уолша W1-W4, соответственно, назначенными четырем антеннам, как описано выше и показано в таблице 1. Каждый буфер/мультиплексор 670 предоставляет поток символов xi(n) передачи для одной передающей антенны, причем поток символов передачи содержит последовательно соединенные последовательности из NF символов передачи.Each buffer / multiplexer 670 receives pilot symbols and preprocessed symbols from TX subband spatial processors 640 for N D data subbands. Each buffer / multiplexer 670 then multiplexes the pilot symbols, preprocessed symbols and zeros for the pilot subbands, data subbands and unused subbands, respectively, to form a sequence of N F transmission symbols for a given symbol period. During calibration, pilot symbols are transmitted over the assigned subbands.
Пространственная обработка и OFDM модуляция более подробно описаны в вышеупомянутой предварительной заявке на патент США № 60/421309.Spatial processing and OFDM modulation are described in more detail in the aforementioned provisional application for US patent No. 60/421309.
В различных вариантах осуществления настоящего изобретения, изложенных в настоящем описании, может быть реализована одноранговая связь между различными пользовательскими терминалами (UT или STA) в пределах одной базовой зоны обслуживания (BSS) или различных BSS, как описано ниже. UT или STA, которые выполнили калибровку с одной точкой доступа (AP), являются членами базовой зоны обслуживания (BSS). Одна точка доступа представляет собой общий узел для всех UT в BSS. Способы калибровки, описанные выше, облегчают следующие типы коммуникации:In various embodiments of the present invention set forth herein, peer-to-peer communication between different user terminals (UT or STA) within one basic service area (BSS) or different BSSs can be implemented, as described below. UTs or STAs that calibrate with a single access point (AP) are members of a Basic Service Area (BSS). One access point is a common node for all UTs in the BSS. The calibration methods described above facilitate the following types of communication:
(i) UT в BSS может использовать направленную передачу (TX) для прямой связи с AP по восходящей линии (UL), и AP может использовать направленную передачу (TX) для связи с UT по нисходящей линии (DL).(i) The UT in the BSS can use directional transmission (TX) for direct communication with the uplink (UL) AP, and the AP can use directional transmission (TX) for communication with the UT in downlink (DL).
(ii) UT в BSS может непосредственно обмениваться данными с другим UT в той же BSS, используя направленную связь. В этом случае такая одноранговая связь должна быть предварительно инициирована, поскольку ни один из UT не имеет сведений о канале между ними. В различных вариантах осуществления процедура предварительной инициации работает следующим образом:(ii) A UT in a BSS can directly communicate with another UT in the same BSS using directional communication. In this case, such a peer-to-peer communication should be pre-initiated, since none of the UT has channel information between them. In various embodiments, the preliminary initiation procedure works as follows:
- инициатор одноранговой линии является AP-источником (DAP), а другой UT является UT-приемником (DUT).- the peer initiator is an AP source (DAP) and the other UT is a UT receiver (DUT).
- DAP посылает MIMO пилот-сигнал для DUT вместе с запросом на установление линии, который содержит BSS ID и DAP ID. Запрос должен быть отправлен в общем режиме (т.е. с разнесением при передаче).- The DAP sends a MIMO pilot to the DUT along with a link setup request that contains the BSS ID and DAP ID. The request should be sent in general mode (i.e., diversity in transmission).
- DUT отвечает путем отправки направленного MIMO пилот-сигнала и подтверждения, которое содержит DUT ID, его BSS ID и некоторый индикатор скорости передачи для использования в DAP.- The DUT responds by sending a pilot MIMO pilot and an acknowledgment that contains the DUT ID, its BSS ID and some indicator of the transmission rate for use in the DAP.
- Затем DAP может использовать направленную передачу по DL и DUT может использовать направленную передачу по UL. Управление скоростью и трекинг могут осуществляться при помощи разделения передач на сегменты DL и UL с достаточными интервалами времени между ними для выполнения обработки.- Then the DAP can use directional transmission over DL and the DUT can use directional transmission over UL. Speed control and tracking can be done by splitting the gears into DL and UL segments with sufficient time intervals between them to complete the processing.
(iii) UT, которые принадлежат одной BSS (например, BSS1), могут использовать направленную передачу в UT, которые принадлежат другой BSS (например, BSS2), даже если каждый из них выполнил калибровку с различной AP. Однако в этом случае имеется неопределенность в фазовом угле (для каждого поддиапазона). Это происходит вследствие того, что процедура калибровки, описанная выше, устанавливает отношение, которое является уникальным для AP, с которой была выполнена калибровка. Указанное отношение представляет собой комплексную константу,(iii) UTs that belong to one BSS (e.g., BSS1) can use directional transmission to UTs that belong to another BSS (e.g., BSS2), even if each of them performed a calibration with a different AP. However, in this case there is uncertainty in the phase angle (for each subband). This is because the calibration procedure described above establishes a relationship that is unique to the AP with which the calibration was performed. The indicated ratio is a complex constant,
![]()
![]()
где k представляет собой индекс поддиапазона и j представляет собой индекс AP, а 0 представляет собой индекс референсной антенны (например, антенны 0), используемой в AP. В одном из вариантов осуществления эта константа является общей для всех UT в данной BSS, но является независимой для различных BSS.where k is the subband index and j is the AP index, and 0 is the index of the reference antenna (e.g., antenna 0) used in the AP. In one embodiment, this constant is common to all UTs in a given BSS, but independent of different BSSs.
В результате, когда UT из BSS1 обменивается данными с UT в BSS2, направленная связь без коррекции или компенсации для этой константы может привести в результате к сдвигу фазы и масштабированию амплитуды всей собственной системы. Сдвиг фазы может быть определен при помощи использования пилот-сигнала (направленного или ненаправленного) и удален в приемниках каждого соответствующего UT. В одном варианте осуществления амплитудная коррекция или компенсация может представлять собой обыкновенное масштабирование ОСШ и может быть удалена при помощи оценки уровня шума в каждом приемнике, что может оказать воздействие на выбор скорости передачи.As a result, when a UT from BSS1 exchanges data with a UT in BSS2, directional communication without correction or compensation for this constant can result in a phase shift and amplitude scaling of the entire native system. The phase shift can be determined using a pilot signal (directional or non-directional) and removed at the receivers of each respective UT. In one embodiment, the amplitude correction or compensation may be an ordinary SNR scaling and may be removed by estimating the noise level at each receiver, which may affect the choice of transmission rate.
В различных вариантах осуществления одноранговый обмен между UT, которые принадлежат различным BSS, может выполняться следующим образом:In various embodiments, peer-to-peer exchanges between UTs that belong to different BSSs may be performed as follows:
- инициатор одноранговой линии (например, UT BSS1) является AP-источником (DAP), а другой UT (например, UT BSS2) является UT-приемником (DUT).- the peer initiator (for example, UT BSS1) is the AP source (DAP), and the other UT (for example, UT BSS2) is the UT receiver (DUT).
- DAP посылает MIMO пилот-сигнал для DUT вместе с запросом на установление линии, который содержит BSS ID и DAP ID. Запрос должен быть отправлен в общем режиме (т.е. с разнесением при передаче).- The DAP sends a MIMO pilot to the DUT along with a link setup request that contains the BSS ID and DAP ID. The request should be sent in general mode (i.e., diversity in transmission).
- DUT отвечает путем отправки направленного MIMO пилот-сигнала и подтверждения, которое содержит DUT ID, его BSS ID и некоторый индикатор скорости передачи для использования в DAP.- The DUT responds by sending a pilot MIMO pilot and an acknowledgment that contains the DUT ID, its BSS ID and some indicator of the transmission rate for use in the DAP.
- DAP приемник (Rx) может выполнить оценку сдвига фазы для восходящей линии (UL) и применить поправочную константу для каждого поддиапазона. Затем DAP может использовать направленную передачу по нисходящей линии (DL), но должен включить преамбулу направленного опорного сигнала, по меньшей мере, в первый направленный пакет для того, чтобы дать возможность DUT приемнику (Rx) выполнить коррекцию или компенсацию сдвига фазы в DL для каждого поддиапазона. Для последующих передач по DL может не требоваться преамбула с направленным референсным сигналом. Управление скоростью и трекинг могут осуществляться при помощи разделения передач на сегменты DL и UL с достаточными интервалами времени между ними для выполнения обработки.- The DAP receiver (Rx) can perform an uplink (UL) phase shift estimate and apply a correction constant for each subband. The DAP can then use downlink directional transmission (DL), but must include the directional reference preamble in at least the first directional packet to enable the DUT receiver (Rx) to perform DL phase correction or compensation for each subrange. Subsequent DL transmissions may not require a preamble with a directional reference signal. Speed control and tracking can be done by splitting the gears into DL and UL segments with sufficient time intervals between them to complete the processing.
Способы калибровки, изложенные в настоящем описании, могут быть реализованы при помощи различных средств. Например, эти способы могут быть реализованы в виде аппаратных средств, программных средств или их комбинации. В случае реализации в виде аппаратных средств способы могут быть реализованы в точке доступа и пользовательском терминале в одной или нескольких ориентированных на приложение интегральных схемах (ASIC), цифровых сигнальных процессорах (DSP), цифровых сигнальных процессорных устройствах (DSPD), программируемых логических устройствах (PLD), внутрисхемно программируемых вентильных матрицах (FPGA), процессорах, контроллерах, микроконтроллерах, других электронных блоках, выполненных с возможностью выполнения функций, изложенных в настоящем описании или их комбинации.The calibration methods described herein can be implemented using various means. For example, these methods may be implemented in hardware, software, or a combination thereof. In the case of hardware implementation, the methods can be implemented at the access point and user terminal in one or more application-oriented integrated circuits (ASIC), digital signal processors (DSP), digital signal processor devices (DSPD), programmable logic devices (PLD ), in-circuit programmable gate arrays (FPGAs), processors, controllers, microcontrollers, and other electronic units configured to perform the functions described in this description or combinations thereof.
В случае осуществления в виде программных средств способы калибровки могут быть реализованы при помощи модулей (например, процедур, функций и т.д.), которые выполняют функции, изложенные в настоящем описании. Программные коды могут храниться в запоминающем устройстве (например, запоминающих устройствах, 532 и 582 по Фиг.5) и выполняться процессором (например, контроллерами 530 и 580, соответственно). Запоминающее устройство может быть выполнено в процессоре или как внешнее по отношению к процессору, причем в этом случае оно может быть соединено с возможностью обмена данными с процессором при помощи различных средств, известных в данной области техники.In the case of implementation in the form of software, calibration methods can be implemented using modules (for example, procedures, functions, etc.) that perform the functions described in the present description. Software codes may be stored in a storage device (e.g., storage devices 532 and 582 of FIG. 5) and executed by a processor (e.g., controllers 530 and 580, respectively). The storage device can be performed in the processor or as external to the processor, in which case it can be connected with the possibility of exchanging data with the processor using various means known in the art.
Заголовки включены в настоящее описание для ссылки и для помощи в поиске определенных разделов. Указанные заголовки не следует рассматривать как ограничивающие объем концепций в озаглавленных ими разделах, и эти концепции могут применяться в других разделах по всему описанию.Headings are included herein for reference and to aid in the search for specific sections. These headings should not be construed as limiting the scope of concepts in their sections, and these concepts may be applied in other sections throughout the description.
Приведенное выше описание раскрытых вариантов осуществления представлено для того, чтобы дать возможность любому специалисту в данной области техники использовать настоящее изобретение. Различные модификации в отношении указанных вариантов осуществления должны быть очевидны для специалистов в данной области техники, и общие принципы, изложенные в настоящем описании, применимы к другим вариантам осуществления без отступления от сущности и объема настоящего изобретения. Таким образом, настоящее изобретение не следует ограничивать вариантами осуществления, раскрытыми в настоящем описании, но напротив, соответствует самому широкому объему, совместимому с принципами и новыми отличительными особенностями, раскрытыми в настоящем описании.The above description of the disclosed embodiments is provided to enable any person skilled in the art to use the present invention. Various modifications with respect to these embodiments should be apparent to those skilled in the art, and the general principles set forth herein are applicable to other embodiments without departing from the spirit and scope of the present invention. Thus, the present invention should not be limited to the embodiments disclosed in the present description, but on the contrary, corresponds to the widest scope compatible with the principles and new features disclosed in the present description.
Claims (38)
получают оценку отклика нисходящего канала;
получают оценку отклика восходящего канала;
определяют первый и второй наборы поправочных факторов, основываясь на оценках откликов нисходящего и восходящего каналов;
калибруют нисходящий канал и восходящий канал, основываясь на первом и втором наборах поправочных факторов соответственно, для формирования калиброванного нисходящего канала и калиброванного восходящего канала; и
устанавливают непосредственную одноранговую связь со вторым пользовательским терминалом без дополнительной калибровки между первым и вторым пользовательскими терминалами.1. A method for establishing peer-to-peer communications by a first user terminal (UT) in a wireless communication system, comprising the steps of:
receiving a downlink response estimate;
receiving an uplink channel response estimate;
determining the first and second sets of correction factors based on estimates of the responses of the downward and upward channels;
calibrating the downlink and uplink based on the first and second sets of correction factors, respectively, to form a calibrated downlink and a calibrated uplink; and
establish direct peer-to-peer communication with the second user terminal without additional calibration between the first and second user terminals.
используют для масштабирования символов, принятых по восходящему каналу.3. The method according to claim 1, in which the first set of correction factors are used to scale the symbols received on the downward channel, and the second set of correction factors
used to scale the symbols received on the uplink.
где
T обозначает транспонирование.4. The method according to claim 1, in which the first and second sets of correction factors are determined based on the following equation:
Where
T stands for transposition.
получают оценку отклика восходящего канала, выведенную, основываясь на пилот-сигнале, передаваемом по восходящему каналу;
принимают пилот-сигнал по нисходящему каналу;
получают оценку отклика нисходящего канала, выведенную, основываясь на пилот-сигнале, передаваемом по нисходящему каналу; и
определяют первый и второй наборы поправочных факторов, основываясь на оценках откликов нисходящего и восходящего каналов, причем калиброванный нисходящий канал формируют с использованием первого набора поправочных факторов для нисходящего канала и калиброванный восходящий канал формируют с использованием первого набора поправочных факторов для восходящего канала; и
устанавливают непосредственную одноранговую связь со вторым пользовательским терминалом без дополнительной калибровки между первым и вторым пользовательскими терминалами.18. A method for establishing peer-to-peer communications by means of a first user terminal (UT) in a time division duplex (TDD) wireless communication system with multiple inputs and multiple outputs (MIMO), comprising the steps of transmitting the pilot signal on the uplink;
receiving an uplink channel response estimate derived based on the pilot transmitted on the uplink;
receive the pilot signal in the downward channel;
obtaining a downlink response estimate derived based on the pilot transmitted on the downlink; and
determining the first and second sets of correction factors based on the estimates of the responses of the downlink and uplink channels, wherein a calibrated downlink channel is generated using the first set of correction factors for the downlink and a calibrated uplink channel is generated using the first set of correction factors for the uplink; and
establish direct peer-to-peer communication with the second user terminal without additional calibration between the first and second user terminals.
средство для получения оценки отклика нисходящего канала;
средство для получения оценки отклика восходящего канала;
средство определения первого и второго наборов поправочных факторов, основываясь на оценках откликов нисходящего и восходящего каналов, причем калиброванный нисходящий канал формируют с использованием первого набора поправочных факторов для нисходящего канала и калиброванный восходящий канал формируют с использованием второго набора поправочных факторов для восходящего канала; и
средство для установления непосредственной одноранговой связи со вторым пользовательским терминалом без дополнительной калибровки между первым и вторым пользовательскими терминалами.24. A first user terminal (UT) for determining correction factors in a time division duplex (TDD) wireless communication system with multiple inputs and multiple outputs (MIMO), comprising
means for obtaining an estimate of the response of the downward channel;
means for obtaining an estimate of the response of the upward channel;
means for determining the first and second sets of correction factors based on estimates of the responses of the downward and upward channels, wherein a calibrated downlink channel is formed using the first set of correction factors for the downlink channel and a calibrated upward channel is formed using the second set of correction factors for the uplink channel; and
means for establishing direct peer-to-peer communication with the second user terminal without additional calibration between the first and second user terminals.
ТХ пространственный процессор, выполненный с возможностью передачи первого пилот-сигнала по восходящему каналу;
RX пространственный процессор, выполненный с возможностью приема второго пилот-сигнала по нисходящему каналу и вывода оценки отклика нисходящего канала, основываясь на принятом втором пилот-сигнале, и приема оценки отклика восходящего канала, выведенной, основываясь на переданном первом пилот-сигнале; и
контроллер, выполненный с возможностью определения первого и второго наборов поправочных факторов, основываясь на оценках откликов нисходящего и восходящего каналов, причем калиброванный нисходящий канал формируют с использованием первого набора поправочных факторов для нисходящего канала и калиброванный восходящий канал формируют с использованием второго набора поправочных факторов для восходящего канала, и определение первого и второго наборов поправочных факторов, основываясь на вычислении с минимальной среднеквадратичной ошибкой (MMSE).25. A user terminal in a wireless time division duplex (TDD) communication system comprising
TX spatial processor, configured to transmit the first pilot signal on the uplink;
An RX spatial processor, configured to receive a second downlink pilot and derive a downlink response estimate based on the received second pilot and receive an uplink response estimate derived based on the transmitted first pilot; and
a controller configured to determine the first and second sets of correction factors based on estimates of the responses of the downstream and upstream channels, wherein the calibrated downlink channel is formed using the first set of correction factors for the downlink and the calibrated uplink channel is formed using the second set of correction factors for the uplink , and the determination of the first and second sets of correction factors, based on a calculation with a minimum mean square error by hand (MMSE).
калибруют одну или несколько коммуникационных линий между множеством пользовательских станций и одной или несколькими точками доступа, основываясь на одном или нескольких наборах поправочных факторов, выведенных из оценок откликов каналов, связанных с одной или несколькими коммуникационными линиями, причем множество пользовательских станций включает в себя первую пользовательскую станцию и вторую пользовательскую станцию; и
устанавливают связь между первой и второй пользовательскими станциями, используя направленную связь, без выполнения калибровки между первой и второй пользовательскими станциями, и основываясь на упомянутых одном или нескольких наборах поправочных факторов.27. A communication method in a wireless system, comprising the steps of:
calibrate one or more communication lines between a plurality of user stations and one or more access points based on one or more sets of correction factors derived from channel response estimates associated with one or more communication lines, the many user stations including a first user station and a second user station; and
establish communication between the first and second user stations using directional communication, without performing calibration between the first and second user stations, and based on said one or more sets of correction factors.
посылают от первой пользовательской станции пилот-сигнал и запрос на установление коммуникационной линии со второй пользовательской станцией;
посылают от второй пользовательской станции направленный пилот-сигнал и подтверждение в ответ на прием пилот-сигнала и запроса от первой пользовательской станции;
передают информацию между первой и второй пользовательскими станциями, используя направленную связь, основанную на направленном пилот-сигнале.28. The method according to item 27, in which the establishment of communication between the first and second user stations comprises the steps of
sending a pilot signal and a request for establishing a communication line with the second user station from the first user station;
sending a directed pilot signal and acknowledgment from the second user station in response to receiving the pilot signal and the request from the first user station;
transmit information between the first and second user stations using directional communication based on the directional pilot signal.
посылают от первой пользовательской станции пилот-сигнал и запрос на установление коммуникационной линии со второй пользовательской станцией; посылают от второй пользовательской станции направленный пилот-сигнал и подтверждение в ответ на прием пилот-сигнала и запроса от первой пользовательской станции; и
передают информацию между первой и второй пользовательскими станциями, используя направленную связь, которая настроена для компенсации сдвига фазы, вследствие калибровки первой и второй пользовательских станций по отношению к разным точкам доступа.31. The method according to item 27, in which one or more access points include a first access point associated with the first basic service area (BSS), and a second access point associated with the second BSS, the first user station calibrated with respect to the first access points, and the second user station is calibrated with respect to the second access point, and establishing a connection between the first and second user stations comprises the steps of
sending a pilot signal and a request for establishing a communication line with the second user station from the first user station; sending a directed pilot signal and acknowledgment from the second user station in response to receiving the pilot signal and the request from the first user station; and
transmit information between the first and second user stations using directional communication, which is configured to compensate for the phase shift due to the calibration of the first and second user stations with respect to different access points.
средство для калибровки одной или нескольких коммуникационных линий между множеством пользовательских станций и одной или несколькими точками доступа, основываясь на одном или нескольких наборах поправочных факторов, выведенных из оценок откликов каналов, связанных с одной или несколькими коммуникационными линиями, причем множество пользовательских станций включает в себя первую пользовательскую станцию и вторую пользовательскую станцию; и
средство для установки связи между первой и второй пользовательскими станциями, используя направленную связь, без выполнения калибровки между первой и второй пользовательскими станциями, и основываясь на упомянутых одном или нескольких наборах поправочных факторов.33. A device for communicating in a wireless system, comprising
means for calibrating one or more communication lines between a plurality of user stations and one or more access points based on one or more sets of correction factors derived from channel response estimates associated with one or more communication lines, the many user stations including the first a user station and a second user station; and
means for establishing communication between the first and second user stations using directional communication, without performing a calibration between the first and second user stations, and based on said one or more sets of correction factors.
средство для отправки из первой пользовательской станции пилот-сигнала и запроса на установление коммуникационной линии со второй пользовательской станцией;
средство для отправки из второй пользовательской станции направленного пилот-сигнала и подтверждения в ответ на прием пилот-сигнала и запроса от первой пользовательской станции;
средство для передачи информации между первой и второй пользовательскими станциями, используя направленную связь, основанную на направленном пилот-сигнале.34. The device according to p, in which the establishment of communication between the first and second user stations contains
means for sending from the first user station a pilot signal and a request for establishing a communication line with the second user station;
means for sending a directed pilot signal from the second user station and acknowledging in response to receiving the pilot signal and the request from the first user station;
means for transmitting information between the first and second user stations using directional communication based on the directional pilot signal.
средство для посылки от первой пользовательской станции пилот-сигнала и запроса на установление коммуникационной линии со второй пользовательской станцией;
средство для посылки от второй пользовательской станции направленный пилот-сигнала и подтверждения в ответ на прием пилот-сигнала и запроса от первой пользовательской станции;
средство для передачи информации между первой и второй пользовательскими станциями, используя направленную связь, которая настроена для компенсации сдвига фазы, вследствие калибровки первой и второй пользовательских станций по отношению к разным точкам доступа.37. The device according to p. 33, in which one or more access points include a first access point associated with the first basic service area (BSS), and a second access point associated with the second BSS, the first user station calibrated with respect to the first access points, and the second user station is calibrated with respect to the second access point, and establishing a connection between the first and second user stations comprises the steps of
means for sending from the first user station a pilot signal and a request for establishing a communication line with the second user station;
means for sending a pilot signal from the second user station and acknowledging in response to receiving the pilot signal and the request from the first user station;
means for transmitting information between the first and second user stations using directional communication, which is configured to compensate for the phase shift, due to the calibration of the first and second user stations with respect to different access points.
Applications Claiming Priority (5)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| US42146202P | 2002-10-25 | 2002-10-25 | |
| US42130902P | 2002-10-25 | 2002-10-25 | |
| US60/421,462 | 2002-10-25 | ||
| US60/421,309 | 2002-10-25 | ||
| US10,693,169 | 2003-10-23 |
Related Parent Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| RU2005115564/09A Division RU2005115564A (en) | 2002-10-25 | 2003-10-24 | CHANNEL CALIBRATION FOR A DUPLEX COMMUNICATION SYSTEM AND TEMPORARY CHANNEL SEPARATION |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| RU2009134903A RU2009134903A (en) | 2011-04-10 |
| RU2437220C2 true RU2437220C2 (en) | 2011-12-20 |
Family
ID=35865349
Family Applications (2)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| RU2005115564/09A RU2005115564A (en) | 2002-10-25 | 2003-10-24 | CHANNEL CALIBRATION FOR A DUPLEX COMMUNICATION SYSTEM AND TEMPORARY CHANNEL SEPARATION |
| RU2009134903/08A RU2437220C2 (en) | 2002-10-25 | 2009-09-17 | Calibration of channel for communication system with duplex communication and time division channelling |
Family Applications Before (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| RU2005115564/09A RU2005115564A (en) | 2002-10-25 | 2003-10-24 | CHANNEL CALIBRATION FOR A DUPLEX COMMUNICATION SYSTEM AND TEMPORARY CHANNEL SEPARATION |
Country Status (1)
| Country | Link |
|---|---|
| RU (2) | RU2005115564A (en) |
Cited By (2)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2575209C2 (en) * | 2014-01-28 | 2016-02-20 | Российская Федерация, от имени которой выступает Министерство обороны Российской Федерации | Method of calibrating receiving radio links of radio interferometer and device therefor |
| RU2700688C1 (en) * | 2018-09-24 | 2019-09-19 | Самсунг Электроникс Ко., Лтд. | Methods for calibrating channels of phased antenna array |
Families Citing this family (13)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| US6360100B1 (en) | 1998-09-22 | 2002-03-19 | Qualcomm Incorporated | Method for robust handoff in wireless communication system |
| US6862446B2 (en) | 2003-01-31 | 2005-03-01 | Flarion Technologies, Inc. | Methods and apparatus for the utilization of core based nodes for state transfer |
| US7668541B2 (en) | 2003-01-31 | 2010-02-23 | Qualcomm Incorporated | Enhanced techniques for using core based nodes for state transfer |
| US8983468B2 (en) | 2005-12-22 | 2015-03-17 | Qualcomm Incorporated | Communications methods and apparatus using physical attachment point identifiers |
| US8509799B2 (en) | 2005-09-19 | 2013-08-13 | Qualcomm Incorporated | Provision of QoS treatment based upon multiple requests |
| US9066344B2 (en) | 2005-09-19 | 2015-06-23 | Qualcomm Incorporated | State synchronization of access routers |
| US8982835B2 (en) | 2005-09-19 | 2015-03-17 | Qualcomm Incorporated | Provision of a move indication to a resource requester |
| US9736752B2 (en) | 2005-12-22 | 2017-08-15 | Qualcomm Incorporated | Communications methods and apparatus using physical attachment point identifiers which support dual communications links |
| JP4870096B2 (en) * | 2006-01-10 | 2012-02-08 | パナソニック株式会社 | Multi-carrier modulation method and transmitter and receiver using the method |
| US9155008B2 (en) | 2007-03-26 | 2015-10-06 | Qualcomm Incorporated | Apparatus and method of performing a handoff in a communication network |
| US8830818B2 (en) | 2007-06-07 | 2014-09-09 | Qualcomm Incorporated | Forward handover under radio link failure |
| US9094173B2 (en) | 2007-06-25 | 2015-07-28 | Qualcomm Incorporated | Recovery from handoff error due to false detection of handoff completion signal at access terminal |
| US8615241B2 (en) | 2010-04-09 | 2013-12-24 | Qualcomm Incorporated | Methods and apparatus for facilitating robust forward handover in long term evolution (LTE) communication systems |
-
2003
- 2003-10-24 RU RU2005115564/09A patent/RU2005115564A/en unknown
-
2009
- 2009-09-17 RU RU2009134903/08A patent/RU2437220C2/en active
Cited By (3)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2575209C2 (en) * | 2014-01-28 | 2016-02-20 | Российская Федерация, от имени которой выступает Министерство обороны Российской Федерации | Method of calibrating receiving radio links of radio interferometer and device therefor |
| RU2700688C1 (en) * | 2018-09-24 | 2019-09-19 | Самсунг Электроникс Ко., Лтд. | Methods for calibrating channels of phased antenna array |
| US11362714B2 (en) | 2018-09-24 | 2022-06-14 | Samsung Electronics Co., Ltd. | Method and apparatus for performing beamforming in wireless communication system |
Also Published As
| Publication number | Publication date |
|---|---|
| RU2005115564A (en) | 2005-11-10 |
| RU2009134903A (en) | 2011-04-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| RU2437220C2 (en) | Calibration of channel for communication system with duplex communication and time division channelling | |
| JP5528867B2 (en) | Channel calibration for time division duplex communication systems. | |
| RU2407151C2 (en) | Channel calibration for duplex communication system with time division multiplex | |
| JP2010193477A6 (en) | Channel calibration for time division duplex communication systems. | |
| US6738020B1 (en) | Estimation of downlink transmission parameters in a radio communications system with an adaptive antenna array | |
| RU2406228C2 (en) | Selection of transmission speed for characteristic control in mimo communication system | |
| US7957450B2 (en) | Method and system for frame formats for MIMO channel measurement exchange | |
| US9118111B2 (en) | Antenna array calibration for wireless communication systems | |
| US7231184B2 (en) | Low overhead transmit channel estimation | |
| AU2013270503A1 (en) | Method and Apparatus for Antenna Mapping Selection in MIMO-OFDM Wireless Networks |