RU2294552C2 - Auto-collimation endoscope - Google Patents
Auto-collimation endoscope Download PDFInfo
- Publication number
- RU2294552C2 RU2294552C2 RU2005106047/28A RU2005106047A RU2294552C2 RU 2294552 C2 RU2294552 C2 RU 2294552C2 RU 2005106047/28 A RU2005106047/28 A RU 2005106047/28A RU 2005106047 A RU2005106047 A RU 2005106047A RU 2294552 C2 RU2294552 C2 RU 2294552C2
- Authority
- RU
- Russia
- Prior art keywords
- endoscope
- optical axis
- max
- lens
- external
- Prior art date
Links
Images
Landscapes
- Endoscopes (AREA)
- Instruments For Viewing The Inside Of Hollow Bodies (AREA)
- Investigating Materials By The Use Of Optical Means Adapted For Particular Applications (AREA)
Abstract
Description
Изобретение относится к неразрушающему контролю с помощью визуально-оптических и/или телевизионных средств и может быть использовано для контроля внутренних полостей различных изделий в оборонной, авиакосмической технике, а также в других отраслях машиностроения.The invention relates to non-destructive testing using visual-optical and / or television means and can be used to control the internal cavities of various products in defense, aerospace engineering, as well as in other engineering industries.
Известен эндоскоп для визуального поиска и измерения трехмерных дефектов. Он содержит корпус, в котором расположены осветительный световод, объектив, канал передачи изображения, окуляр с линейной шкалой, а также устройство для крепления эндоскопа на объекте с возможностью трехмерного перемещения и поворота относительно продольной оси эндоскопа и соответствующие индикаторы этих перемещений. Канал передачи изображения выполнен в виде регулярного световода или микротелекамеры. Эндоскоп дополнительно содержит светоделитель, расположенный между линейной шкалой и окуляром, непрозрачную маску с вырезом, осветитель для ее подсветки и дополнительную микролинзу. Маска с вырезом установлена перпендикулярно оси, проходящей через точку пересечения светоделителя с оптической осью эндоскопа и перпендикулярно ей, и оптически сопряжена с линейной шкалой. Дополнительную микролинзу вводят с помощью дистанционною механизма в ход лучей перед объективом эндоскопа на его оптической оси таким образом, что ее фокальная плоскость последовательно совпадает с наружной и внутренней поверхностями дефекта в процессе фокусировочных перемещений эндоскопа. Обеспечивается повышение точности и равномерности освоения [1].Known endoscope for visual search and measurement of three-dimensional defects. It contains a housing in which there is a light guide, a lens, an image transmission channel, an eyepiece with a linear scale, and also a device for attaching an endoscope to an object with the possibility of three-dimensional movement and rotation relative to the longitudinal axis of the endoscope and corresponding indicators of these movements. The image transmission channel is made in the form of a regular optical waveguide or micro-television camera. The endoscope further comprises a beam splitter located between the linear scale and the eyepiece, an opaque mask with a notch, a illuminator for its illumination and an additional microlens. The mask with the cutout is installed perpendicular to the axis passing through the point of intersection of the beam splitter and the optical axis of the endoscope and perpendicular to it, and is optically coupled to a linear scale. An additional microlensis is introduced using a remote mechanism into the rays in front of the endoscope lens on its optical axis so that its focal plane consecutively coincides with the outer and inner surfaces of the defect during focusing movements of the endoscope. EFFECT: increased accuracy and uniformity of development [1].
Недостаток данного изобретения - невозможность измерения глубины дефектов на боковых поверхностях полостей, в которые вводится эндоскоп. Вместе с тем, это актуально при визуальном и измерительном контроле внутренних поверхностей трубопроводов различного назначения, СВЧ-волноводов, гидроусилителей и т.п. объектов.The disadvantage of this invention is the inability to measure the depth of defects on the lateral surfaces of the cavities into which the endoscope is inserted. At the same time, this is relevant for visual and measuring control of the internal surfaces of pipelines for various purposes, microwave waveguides, power amplifiers, etc. objects.
Для устранения вышеуказанных недостатков в эндоскоп для визуального поиска и измерения трехмерных дефектов, содержащий корпус, в котором расположены осветительный световод, объектив, канал передачи изображения, выполненный в виде световода, окуляр с измерительной шкалой, а также устройство для крепления эндоскопа на объекте с возможностью трехмерного перемещения и поворота относительно продольной оси эндоскопа и соответствующие индикаторы этих перемещений, светоделитель, расположенный между линейной шкалой и окуляром, непрозрачную маску с вырезом, установленную перпендикулярно оси, проходящей через точку пересечения светоделителя с оптической осью эндоскопа и перпендикулярно ей, и оптически сопряженную с линейной шкалой, осветитель для ее подсветки, дополнительную микролинзу, вводимую с помощью дистанционного механизма в ход лучей перед объективом эндоскопа и располагаемую в корпусе эндоскопа на его оптической оси таким образом, что ее фокальная плоскость последовательно совпадает с наружной и внутренней поверхностями дефекта в процессе фокусировочных перемещений эндоскопа, дополнительно введен внешний корпус, выполненный в виде тонкостенной трубки, на внешней поверхности которой вдоль ее образующей нанесена линейная шкала, внутри трубки располагается корпус с возможностью линейного перемещения вдоль нее с помощью микрометрического механизма с индикатором перемещений, установленного на внешнем корпусе, на торце внешнего корпуса под углом 45° к оптической оси эндоскопа установлено плоское зеркало, при этом диаметр внешнего корпуса D, фокусное расстояние дополнительной микролинзы объектива эндоскопа fк, расстояние от микролинзы до точки пересечения оптической оси эндоскопа с зеркалом t и максимальной глубиною Нmax измеряемого дефекта связаны соотношением fк= t-D/2+Hmax+Δ, где Δ - зазор между внешним корпусом эндоскопа и контролируемой поверхностью.To eliminate the above disadvantages, an endoscope for visual search and measurement of three-dimensional defects, comprising a housing in which there is a light guide, a lens, an image transmission channel made in the form of a light guide, an eyepiece with a measuring scale, and a device for attaching an endoscope to an object with the possibility of three-dimensional movement and rotation relative to the longitudinal axis of the endoscope and the corresponding indicators of these movements, a beam splitter located between the linear scale and the eyepiece, opaque a mask with a cutout mounted perpendicular to the axis passing through the intersection point of the beam splitter and the optical axis of the endoscope and perpendicular to it, and optically conjugated to a linear scale, a illuminator for its illumination, an additional microlenses, introduced by a remote mechanism into the rays in front of the endoscope lens and placed in the body of the endoscope on its optical axis in such a way that its focal plane consecutively coincides with the outer and inner surfaces of the defect during focusing the endoscope, an external case is additionally introduced, made in the form of a thin-walled tube, on the outer surface of which a linear scale is applied along its generatrix, inside the tube there is a body with the possibility of linear movement along it using a micrometric mechanism with a movement indicator mounted on the outer case, at the end the outer case at an angle of 45 ° to the optical axis of the endoscope has a flat mirror, the diameter of the outer case D, the focal length of the additional lens micro lens of the endoscope f k , the distance from the microlens to the point of intersection of the optical axis of the endoscope with the mirror t and the maximum depth H max of the measured defect are related by the relation f k = tD / 2 + H max + Δ, where Δ is the gap between the outer casing of the endoscope and the controlled surface.
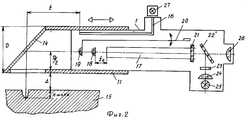
Изобретение поясняется чертежами, фиг.1 и 2, на которых представлены общая схема (фиг.1) и конструкция эндоскопа предлагаемого устройства (фиг.2).The invention is illustrated by drawings, figures 1 and 2, which shows the General scheme (figure 1) and the design of the endoscope of the proposed device (figure 2).
Эндоскоп 1 крепится с помощью стопора 2 во втулке 4, на которой закреплен микровинт 3, с помощью которого эндоскоп 1 линейно перемещается относительно фланца 5, закрепляемого на внешнем корпусе эндоскопа 11 стопором 10. Величина продольного перемещения эндоскопа 1 относительно внешнего корпуса 11 измеряется с помощью индикатора перемещений 9, закрепленного на втулке 4 (фиг.1).The endoscope 1 is attached with a stopper 2 in the
Внешний корпус эндоскопа 11 с расположенным в нем эндоскопом 1 может совершать продольные перемещения относительно фланца 12, а также поворачиваться вокруг своей продольном оси.The outer casing of the
Стопор 13 служит для фиксации корпуса 11 при различной глубине погружения в объект. Корпус 11 крепится на объекте 8 с помощью устройства 6 и 7, позволяющих перемещать его в плоскости, нормальной к оптической оси эндоскопа, в двух ортогональных направлениях.The stopper 13 serves to fix the
На поверхности корпуса 11 нанесена линейная шкала для оценки глубины погружения эндоскопа в объект.A linear scale is applied on the surface of the
На внешней торцевой поверхности фланца 12 нанесена угловая шкала для оценки поворота эндоскопа относительно него.An angular scale is applied on the outer end surface of the
Линейная и угловая шкалы не показаны на фиг.1 в силу общеизвестности данных технических решений.Linear and angular scales are not shown in figure 1 due to the well-known data of technical solutions.
Зеркало 14 на переднем торце корпуса 11 предназначено для наблюдения дефекта 15 под углом 90° к оптической оси эндоскопа.The
На фиг.2 показана схема эндоскопа устройства.Figure 2 shows a diagram of an endoscope device.
Эндоскоп 1 расположен в корпусе (фиг.2), в котором расположены осветительный световод 16, световод для передачи изображения 17, объектив эндоскопа 18, микролинза 19, вводимая (выводимая) из оптической схемы с помощью поворотного стержня 20, измерительная шкала 21, установленная на выходном торце световода 17, полупрозрачное зеркало 22, маска с вырезом 25, осветительный конденсор 24, источник света 25 для подсветки шкалы 21, окуляр 26 и внешний осветитель 27 для подсветки световода 16. Перед микролинзой 19 установлено под углом 45° к оптической оси эндоскопа дополнительное плоское зеркало 14, закрепленное на трубке 11, внутри которой перемещается корпус эндоскопа 1. На фиг.2 обозначены диаметр D трубки 11, t - текущее переменное расстояние от микролинзы 19 до точки пересечения эндоскопа с зеркалом 14 и контролируемой поверхностью 15. Нмакс - максимальная измеряемая глубина дефекта при заданных значениях параметров D, t, Δ.The endoscope 1 is located in the housing (figure 2), in which there is a
Устройство работает следующий образом.The device operates as follows.
Внешний корпус 11 с эндоскопом 1 устанавливают во фланце 12 (фиг.1). Включают осветитель 27 (фиг.2), и при выведенной из хода лучей микролинзе 19 производят визуальный контроль внутренней поверхности изделия 8, осуществляя продольное вращательное перемещение корпуса 11 с эндоскопом 1 во фланце 12, а затем при необходимости его поперечное смещение с помощью устройств 6 и 7 (фиг.1). При обнаружении дефекта 15 фиксируют стопором 15 корпус 11 во фланце 12, вводят микролинзу 19 в ход лучей, включают осветитель 25 (фиг.2) и микровинтом 3 (фиг.1) последовательно фокусируют изображение автоколлимационной марки 24 (фиг.2) на поверхность изделия, прилегающую к дефекту, и на его дно, аналогично методу, описанному в прототипе [1].The
Фиксируют соответствующие показания индикатора перемещения 9 (фиг.1) и по их разности определяют глубину дефекта.The corresponding indications of the displacement indicator 9 are fixed (Fig. 1) and the depth of the defect is determined by their difference.
Планарные размеры дефекта определяют с помощью шкалы 4 (фиг.2).The planar dimensions of the defect are determined using a scale of 4 (figure 2).
С помощью угловой шкалы на фланце 12 (фиг.1) определяют полярные координаты дефекта на поверхности полости. С помощью линейной шкалы на поверхности внешнего корпуса эндоскопа можно также оценивать линейную протяженность дефектов, размеры которых превосходят величину линейного поля зрения эндоскопа. Протяженность дефекта определяется при этом как разность отсчетов по этой шкале, соответствующих моментам наведения эндоскопа на начало и конец дефекта.Using the angular scale on the flange 12 (figure 1) determine the polar coordinates of the defect on the surface of the cavity. Using a linear scale on the surface of the outer body of the endoscope, one can also evaluate the linear extent of defects whose dimensions exceed the linear field of view of the endoscope. The extent of the defect is determined in this case as the difference of the readings on this scale, corresponding to the moments of the endoscope pointing at the beginning and end of the defect.
Между максимальной глубиной измеряемого дефекта Hmax, диаметром внешнего эндоскопа D, зазором между этим корпусом и поверхностью объекта t, фокусным расстоянием микролинзы 19 fк и расстоянием t от микролинзы 19 до точки пересечения ее оптической оси с зеркалом 14 существует очевидное соотношение (фиг.2):Between the maximum depth of the measured defect H max , the diameter of the external endoscope D, the gap between this body and the surface of the object t, the focal length of the microlens 19 f to and the distance t from the
Исследования опытного образца устройства показали, что для характерных значений параметров D=6,0 мм, Δ=0,1÷0,5 мм, t=3 мм и f' к=10 мм, Hmax≤10-(3+0,1+3)≈2,9 мм, что вполне достаточно для практики.Studies of a prototype device showed that for characteristic values of the parameters D = 6.0 mm, Δ = 0.1 ÷ 0.5 mm, t = 3 mm and f ' k = 10 mm, H max ≤10- (3 + 0 , 1 + 3) ≈2.9 mm, which is quite enough for practice.
Погрешность измерений глубины составляет при этом ΔH≅±0,05 мм, что также удовлетворяет реальным требованиям производства. Погрешность измерения планарных размеров дефекта при цене деления шкалы 9, равной 0,1 мм, составляет ±0,2 мм. Погрешность измерения линейной и угловой координат дефекта составляют соответственно ±0,5 мм и 0,2° при ценах деления линейной шкалы 1 мм и угловой 1°.The accuracy of the depth measurements is ΔH≅ ± 0.05 mm, which also satisfies the actual requirements of production. The error in measuring the planar dimensions of the defect at a scale division value of 9 equal to 0.1 mm is ± 0.2 mm. The measurement error of the linear and angular coordinates of the defect is ± 0.5 mm and 0.2 °, respectively, at a division scale of 1 mm and angular 1 °.
Максимальная глубина погружения конкретного эндоскопа в изделие составила при этом 0,6 м, и, как показали исследования, может быть существенно увеличена (до 1±2 м) без существенного снижения погрешности измерения трехмерных размеров дефектов.The maximum immersion depth of a particular endoscope in the product was 0.6 m, and, as studies have shown, can be significantly increased (up to 1 ± 2 m) without significantly reducing the measurement error of the three-dimensional dimensions of defects.
ЛитератураLiterature
1. Патент РФ №2255549. Автоколлимационный эндоскоп.1. RF patent №2255549. Autocollimation endoscope.
2. Справочник конструктора оптико-механических приборов (В.А.Панов и др.). Л., Машиностроение, 1980, 742 с.2. Handbook of the designer of optical-mechanical devices (V.A. Panov and others). L., Engineering, 1980, 742 p.
Claims (1)
Priority Applications (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| RU2005106047/28A RU2294552C2 (en) | 2005-03-04 | 2005-03-04 | Auto-collimation endoscope |
Applications Claiming Priority (1)
| Application Number | Priority Date | Filing Date | Title |
|---|---|---|---|
| RU2005106047/28A RU2294552C2 (en) | 2005-03-04 | 2005-03-04 | Auto-collimation endoscope |
Publications (2)
| Publication Number | Publication Date |
|---|---|
| RU2005106047A RU2005106047A (en) | 2006-08-10 |
| RU2294552C2 true RU2294552C2 (en) | 2007-02-27 |
Family
ID=37059409
Family Applications (1)
| Application Number | Title | Priority Date | Filing Date |
|---|---|---|---|
| RU2005106047/28A RU2294552C2 (en) | 2005-03-04 | 2005-03-04 | Auto-collimation endoscope |
Country Status (1)
| Country | Link |
|---|---|
| RU (1) | RU2294552C2 (en) |
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2457521C2 (en) * | 2010-11-02 | 2012-07-27 | Государственное образовательное учреждение высшего профессионального образования Новгородский государственный университет имени Ярослава Мудрого | Television endoscope |
-
2005
- 2005-03-04 RU RU2005106047/28A patent/RU2294552C2/en not_active IP Right Cessation
Cited By (1)
| Publication number | Priority date | Publication date | Assignee | Title |
|---|---|---|---|---|
| RU2457521C2 (en) * | 2010-11-02 | 2012-07-27 | Государственное образовательное учреждение высшего профессионального образования Новгородский государственный университет имени Ярослава Мудрого | Television endoscope |
Also Published As
| Publication number | Publication date |
|---|---|
| RU2005106047A (en) | 2006-08-10 |
Similar Documents
| Publication | Publication Date | Title |
|---|---|---|
| US3595220A (en) | Device for measuring the distance of an object from the forward end portion of an endoscope | |
| CN101509801B (en) | Intelligent light source linear array CCD liquid level measurement method and measurement device | |
| JPH02193007A (en) | Apparatus for optical inspection of internal contour of tube or bore | |
| US3819267A (en) | Device for measuring dimensions from the forward end portion of an endoscope | |
| CN116908217B (en) | Deep hole measurement and three-dimensional reconstruction system and application method thereof | |
| DE102017004475A1 (en) | Measuring device for measuring surface profiles in cavities | |
| CN201974214U (en) | Liquid level measuring device based on linear array CCD (charge coupled device) and transparent tube | |
| CN102221390A (en) | Liquid level measurement device and liquid level measurement method based on linear array CCD (Charge Coupled Device) and transparent tube | |
| CN102435259A (en) | Linear array CCD (Charge Coupled Device) liquid level measurement device with isolated gate and measurement method | |
| RU2294552C2 (en) | Auto-collimation endoscope | |
| EP3390960B1 (en) | Scanning device and method for measurement and analysis of circular holes in transparent liquids in ionizing radiation environment | |
| Ye et al. | A laser triangulation-based 3D measurement system for inner surface of deep holes | |
| EP0228493A1 (en) | Searching and measuring endoscope | |
| RU2285235C2 (en) | Device for performing visual amd measurement inspection of internal cavities | |
| RU2235349C2 (en) | Autocollimation endoscope | |
| JP2019191050A (en) | Probe for optical imaging and optical measuring apparatus | |
| HU183914B (en) | Optical apparatus for determining the refractivity profile of ligh-conducting fibre | |
| RU2270416C2 (en) | Device for controlling internal surfaces of bodies | |
| RU2290626C2 (en) | Device for visual observation and measuring inner spaces | |
| RU2796797C2 (en) | Fibre-optic method for determining the refractive coefficient of a transparent substance and a fibre-optical refractometric measuring converter implementing it | |
| RU2288446C1 (en) | Optical device for measuring diameter and for checking internal profile of large-sized items | |
| SU1589153A1 (en) | Method of measuring index of refraction of material of hollow translucent cylinder | |
| RU2369999C1 (en) | Laser positioner for x-ray emitter | |
| SU1188693A1 (en) | Endoscopic device for checking pipelines | |
| RU2369993C1 (en) | Laser positioner for x-ray emitter |
Legal Events
| Date | Code | Title | Description |
|---|---|---|---|
| MM4A | The patent is invalid due to non-payment of fees |
Effective date: 20070305 |